-
8/18/2019 Psychoacoustic Investigation on the Auralization of
Spherical Microphone Array Processing With Wave Field Synthesis
1/22
Audio Engineering Society
Convention PaperPresented at the 138th Convention2015 May 7–10
Warsaw, Poland
This Convention paper was selected based on a submitted abstract
and 750-word precis that have been peer reviewed by at least two
qualied anonymous reviewers. The complete manuscript was not peer
reviewed. This convention paper has been reproduced from the
author’s advance manuscript without editing, corrections, or
consideration by the Review Board. The AES takes no responsibility
for the contents. Additional papers may be obtained by sending
request and remittance to Audio Engineering Society, 60 East 42 nd
Street, New York, New York 10165-2520, USA; also see www.aes.org.
All rights reserved. Reproduction of this paper, or any portion
thereof, is not permitted without direct permission from the
Journal of the Audio Engineering Society .
Psychoacoustic investigation on theAuralization of spherical
microphone arrayprocessing with wave eld synthesis
Gyan Vardhan Singh 1
Correspondence should be addressed to Gyan Vardhan Singh (
[email protected] )
ABSTRACT
In the present work we have investigated the perceptual effects
induced by various errors and artifactswhich arise when spherical
microphone arrays are used on the recording side. For spatial audio
it is veryimportant to characterize the acoustic scene in three
dimensional space. In order to achieve this threedimensional
characterization of a sonic scene, spherical microphone arrays are
employed. The use of thesespherical arrays has some inherent issues
because of some errors and by virtue of mathematics involved inthe
processing. In this paper we analyzed these issues on recording
side (spherical microphone array) whichinuence the audio quality on
the rendering side and did a psychoacoustic investigation to access
the extentto which the errors and artifacts produce a perceivable
affect during auralization when the acoustic scene isreproduced
using wave eld synthesis.
1. INTRODUCTIONSound reproduction techniques for virtual sound
sys-
tems have been studied, developed and implementedin various
different ways and congurations. Acous-tic auralization of sound
elds in this work, focuseson wave eld analysis (WFA) concerning
sphericalmicrophone arrays, and their auralization on a
2-dimensional geometry of loudspeaker array follow-ing the
principle of wave eld synthesis (WFS). Inorder to obtain the
acoustic scene characteristics,
microphone arrays are implemented because an ar-ray of
microphones is spatially distributed so it not
only samples the sound in time but also in space.Hence the need
to obtain temporal properties alongwith spatial properties for a
successful spatial soundreproduction is answered by the usage
microphonearrays [2][3][4].
As spherical array can provide us a complete threedimensional
sonic image of an acoustic scene, there-
-
8/18/2019 Psychoacoustic Investigation on the Auralization of
Spherical Microphone Array Processing With Wave Field Synthesis
2/22
Singh Spherical array processing with WFS
fore an attempt has been made in this paper to lookinto
perceptual effect which come into play whenvarious parameters on
the microphone array side arechanged. More importantly we
investigate the corre-spondence between microphone array and the
soundeld renderer and analyze the extent of effect in-duced by
various errors and artifacts.
Any sound wave can be represented as a super posi-ton of plane
waves in far eld of its sources [5][6],and also, we can say that a
room can be character-ized by its impulse responses as it can be
assumed tobe linear time invariant (LTI). Hence if we are ableto
capture the room impulse responses of a roomthen we can fully
characterize the acoustic natureof that room and inturn any
acoustic event in that
room could be reproduced simply with the help of plane wave
decomposed component of its room im-pulse responses.
In process of plane wave decomposition the spheri-cal aperture
of a spherical microphone array is dis-cretized and because of this
limitations get imposedon the performance of the array. An ideal
full audiospectrum wave eld impact is simulated on the con-tinuous
aperture of spherical microphone array andcompared with the sampled
array aperture with dif-ferent degrees of errors in different
categories. Bythis comparison we attempt to establish the
extent
to which a said error would perceptually corrupt areproduced
sound eld. We also try to see the extentto which some degree of
error remains perceptuallyinsignicant or in other words the extent
of errorwhich can be tolerated. The spatial aliasing limitimposed
by the rendering system is analyzed and onthe basis of that a base
for the transform order isestablished for comparison.
These transform orders also referred to as transformlevels come
into play as a consequence of sphericalarray processing when
spherical wave equations aresolved. When higher transform orders or
levels arechosen, theoretically it also increases the sharpnessof
the directional attributes calculated with planewave decomposition.
But there exists a trade off, italso amplies various errors and
artifacts and alsoinduces aliasing.
This research was conducted in TU Ilmenau, Ger-many as a part of
master thesis work [17] and theauralization was implemented in WFS
lab using 88
loudspeaker element. Real room data was not usedbut instead free
eld acoustic impact on sphericalarray was simulated. In the
simulation some partsof SOFiA sound eld analysis toolbox are used
[1].
2. SPHERICAL MICROPHONE ARRAY SIG-NAL PROCESSINGThe following
section introduces the wave equationand the fundamental
mathematical background be-hind spherical array processing. Further
the discus-sion goes into details of spherical harmonic
decom-position and then plane wave decompositon.
2.1 . Wave EquationWave equation in spherical coordinates system
isexpressed as follows
1r 2 · ∂ ∂r r 2 ∂p∂r + 1r 2 sinϑ · ∂ ∂ϑ sinϑ ∂p∂ϑ+ 1r 2 sin 2 ϑ
· ∂
2
∂ϕ 2 − 1c2 · ∂ 2 p
∂t 2 = 0 (1)
In this equation p is a variable of ( r ,ϑ ,ϕ , t ).
Thesolutions of wave equation 1 in frequency domain isexplained in
[5] and is given in two forms as
p(r, Ω, k) = ∞l=0 lm = − l (Alm (k) · j l (kr )+ B lm (k) ·yl
(kr ))Y ml (Ω) (2) p(r, Ω, k) = ∞l=0 lm = − l (C lm (k) ·h
(1)l (kr )
+ D lm (k) ·h(2)l (kr ))Y
ml (Ω) (3)
The two solution represent the interior and exteriorproblem,
equation 3 refers to the exterior problemand equation 2 refers to
the interior problem.
2.2 . Spherical harmonicsY ml (Ω) is the function known as
spherical harmonic
of level or order l and mode m and is dened as
Y ml (ϑ,ϕ) = (2l + 1)4π (l −m)!(l + m)!P ml (cosϑ)eimϕ (4)In
equation 4, P ml (cosϑ) is the Legendre functionof the rst kind and
i = √ −1. Any function ona sphere could be represented by a
combination of spherical harmonics [5]. The spherical harmonicsdene
the angular components of the wave solution.The spherical harmonic
for negative m can be writ-ten as
Y − ml (Ω) = ( −1)m Y ml (Ω)m > 0 (5)where Y ml (Ω) is the
complex conjugate of Y
ml (Ω).
There are 2 l + 1 different spherical harmonics for
AES 138 th Convention, Warsaw, Poland, 2015 May 7–10Page 2 of
22
-
8/18/2019 Psychoacoustic Investigation on the Auralization of
Spherical Microphone Array Processing With Wave Field Synthesis
3/22
Singh Spherical array processing with WFS
each level l as −l ≤m ≤ l. One more property of spherical
harmonics is that they are orthonormal [5].
S 2 Y m
l (Ω)Y ml (Ω)dΩ = δ l l δ m m (6)
here δ l l is the Kronecker delta, which is 1 for l = land 0
otherwise. The surface integral is dened as
S 2 dΩ = 2π0 dϕ π0 sin ϑdϑ (7)As said above the any fuction on a
sphere can bedecomposed into the sum of spherical harmonics [5][18]
.
f (Ω) =
∞
l=0
l
m = − l f lm (k)Y m
l (Ω) (8)
this expression can also be termed as inverse spher-ical Fourier
transform (ISFT) [18]. As the sphericalharmonic functions are
orthonormal hence we canobtain the spherical fourier transform
coefficients,given as
f lm (k) = S 2 Y ml (Ω)f (Ω)dΩ (9)The derivation for this
expression can be referred in[18]. The importance of these
expression presented
above is that with the help of these expression weobtain our
spherical wave decomposition and in turnthe plane wave
decomposition.
2.3 . Spherical harmonic decompositionIn following section we
will derive expressions forspherical harmonic decomposition and
talk aboutvarious consequences which are encountered duringthis
part of wave eld analysis [19][20][13].
2.4 . Interior and Exterior problemTo understand the sound
radiation we will invoketwo similar kind of explanation, in [12]
Zotter ex-plains sound radiation as a soap bubble problem,Figure 1.
We assume a free sound eld and an idealbubble of soap which is
large enough to enclose somesound source, now when the sound is
produced bythe source, the bubble surface will vibrate accordingto
the motion of air, because as sound propagatesthrough the medium it
will hit the bubble and con-sequently the soap bubble will also
vibrate with theair molecules. At respective observation points
on
Fig. 1: Soap bubble model of acoustic radiation[12].
the sphere the wave form of the vibrating spherecan be said to
represent the radiated sound.In [5], Williams has explained that
acoustic soundradiation from the instrument could be
completelydened if we are able to acoustically map the motionof
this continuous surface enclosing the sources. Thiskind of analysis
of sound radiation is called exterior problem . In a similar way
lets we say that there areno sources inside (rather it is enclosing
the measure-ment set up) the soap bubble but instead the
soundradiation propagates from outside (i.e. the sourcesare
outside) and hits the bubble from exterior. Nowidentifying the
motion of the surface of bubble would
be sufficient to describe the acoustic radiation, thisis called
interior problem .
In interior problem analysis, Figure 1, the soundsources are
located outside the spherical volume andestimating the acoustic
effect on the surface of thisvolume is sufficient to characterize
the sound inspace. Going a bit further we may say that in or-der to
map this surface spherical microphone arrayis used. Hence we say
that our spherical microphonearray is enclosed by an imaginary
volume and at eachobservation point of the array we attempt to
mea-sure the acoustic effect invoked by external sources.
In this paper the same analytical line is followed, asthe
spherical array characterizes a listening room en-vironment by
measuring the impulse response com-ing from different directions
[2], this in turn givesthe directional behavior of the sound when
aural-ization is done. The solution for interior problemcomes from
equation 2, as the solution should benite at all point within the
measurement region
AES 138 th Convention, Warsaw, Poland, 2015 May 7–10Page 3 of
22
-
8/18/2019 Psychoacoustic Investigation on the Auralization of
Spherical Microphone Array Processing With Wave Field Synthesis
4/22
Singh Spherical array processing with WFS
Fig. 2: Interior problem[8]
r ≤b in gure 2, hence considering the properties of Hankel
function and spherical Bessel function whenr = 0, that is at the
origin, both the spherical Hankelfunction and spherical Bessel
function of second kindwould not be nite hence our solution would
contain
only the rst term of equation 2 and is given as [5]:
p(r, Ω, k) =∞
l=0
l
m = − l
(Alm (k)) · j l (kr ) ·Y ml (Ω) (10)
2.5 . Spherical wave spectrumNow as dened in equation 10, if we
can obtainthe coefficient Alm (k)then we can easily dene
thepressure eld p(r, Ω, k). Exploiting the property of
orthonormality of spherical harmonics and the factthat any
arbitrary function on a sphere can be ex-panded in terms of its
spherical harmonics [18] andconsidering equation 10 we obtain
Alm (k) = 1
j l (kr ) S 2 p(r, Ω, k)Y ml (Ω)dΩ (11)The expression for Alm
(k) is also called sphericalwave spectrum as it can be regarded as
sphericalFourier transform of p(r, Ω, k) [5], also written as
P lm (r, k ) = 1
j l (kr ) S 2 p(r, Ω, k)Y ml (Ω)dΩ (12)P lm (r, k ) describes
the sound wave in frequency interms of wave number or k-space.
2.6 . Spherical wave sound elds
Before we go to next sections lets bring out someanalysis as to
how to express a spherical wave ata point due to some given source.
Refer to gure3. We consider a point source, also termed as
amonopole at the origin O. The pressure p(r, k ) atpoint P is given
by the expression [5]
p(r, k ) = −ip0(k)ckQ seikr
4πr (13)
Fig. 3: Geometrical description for the calculationof pressure
p(r,ϑ ,ϕ ,k ) at point P for source at Q
Here r is the length of the position vector r for pointP , c is
the speed of sound, and k is the wave number.Qs represents the
source strength [5]. Now if wewant to calculate the pressure eld at
point P dueto a source located at point Q and this can be doneby
some geometrical manupulation on equation 13.
Assume the same monopole to be located at Q withdistance r s = r
s from the origin. If we say r s = r sthen the pressure at point P
due to source at Qwould be equivalent to the pressure at P due to
thesource at the origin O. Therefore pressure p(r, Ω, k)at point P
for a source at Q is
p(r, Ω, k) = −ip0(k)ckQ seik r − r s
4π r −r s
X(14)
Here Ω ≡ (ϕ,ϑ). The signicance of this equationis that we
derived an expression for pressure eldat a point on a sphere due to
a source located ata position other than the origin, that means if
wetry to present a analogy with spherical microphonearray, then
consider the array as a spherical surfaceand at any point on that
surface we can describe thepressure eld due to a source located at
any positionQ. Here one more thing which is to be noted is thefact
that as r −r s is dependent on ϕ and ϑ hence
AES 138 th Convention, Warsaw, Poland, 2015 May 7–10Page 4 of
22
-
8/18/2019 Psychoacoustic Investigation on the Auralization of
Spherical Microphone Array Processing With Wave Field Synthesis
5/22
Singh Spherical array processing with WFS
the sound pressure in equation 14 is also dependenton ϕ and ϑ.
Further as derived in [5] the term X isequivalent to Green function
G(r
|r s ).
2.7 . Spherical harmonic expansion of plane wave p(r, Ω, k) =
p0(k) ·ei ·
k · r (15)
where p0(k) is the magnitude of plane wave, r isthe position
vector ( r, Ω), and k is the wave vector.Assuming p0(k) = 1 for the
purpose of derivationand using equation 15 in 10 we get
ei ·k · r =∞
l=0
l
m = − l
(Alm (k)) · j l (kr ) ·Y ml (Ω) (16)
Here k and r are the wave vector and position vec-tor
respectively. Over here we would like to pointout that the plane
wave which was described in vec-tor domain by wave vector and
position vector inequation 15 is expressed in terms of wave numberk
and scalar distance r . Equation 16 can be furthertransformed as
explained in [5] and is given as
ei ·k · r = 4 π∞
l=0
i l j l (kr )l
m = − l
Y ml (Ω) ·Y ml (Ω0) (17)
here Ω0 ≡ ϕ0 ,ϑ0 is the incident direction of theplane wave,
where as Ω is the point where we wantto observe the pressure eld.
From equations 16and 17 we can draw out a conclusion that
Alm = 4π i l ·Y ml (Ω0) (18)and we observe from this that the
spherical wavecofficient Alm for plane wave sound eld is not
de-pendent on k or frequency f of the wave.
In [6] [8] equation 17 has been simulated for a planewave sound
eld of 1 kHz. The simulation has beenshown for different maximum
value of level l andand nally it was deduced that the plane wave
eld
can be approximated exactly only within a boundedregion around
the origin and this region is bigger forhigher values of l. If we
say that in equation 17, inplace of ∞ in the rst summation we
replace it bya maximum level l = L, then we can establish
anapproximate rule given by
dλ
= L2π
(19)
here d is the radius of the region, L maximum level land λ is
the wavelength og the plane wave. This pr-portionality states the
fact that the region for whichwe can effectively dene the pressure
eld is propor-tional to the level l.
2.8 . Mode strengthWe dene an expression for the combination
of
Bessel function and hankel function which have ap-peared in
earlier sections while deriving coefficientsAlm of spherical
harmonics. In the process of mea-surement of sound elds using
spherical microphonearrays the interaction of sound eld with the
arraystructure has to be taken into consideration [5] [13][20]. If
we recall equation 10 and 11 and expressthem in a generalized form
in order to associate them
to different kind of spherical microphone array struc-ture. The
equation are written as
s(r, Ω, k) =∞
l=0
l
m = − l
(Alm (k)) ·bl (kr ) ·Y ml (Ω) (20)
Alm (k) = 1bl (kr ) S 2 s(r, Ω, k)Y ml (Ω)dΩ (21)
here s(r, Ω, k) is the spherical microphone array re-sponse. The
term bl (kr ) is called as mode strength.For different microphone
array structure the interac-tion of sound elds with the array is
approximated
using this term [5][21].In rigid sphere the sensors arearranged
on a solid sphere.
bl (kr ) = 4 πi l j l kr − j l (ka )h (2)l (ka )
h(2)l (kr ) ,
rigid sphere arrays
(22)
here j l (kr ) is the spherical bessel function of rstkind, h
(2)l (kr ) and h
(2)l (ka ) are the spherical Hankel
function of second kind, ( ·) denotes the derivative,and a is
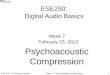
the radius of the sphere, where r ≥ a. Ingure 4 the mode strengths
bl (kr ) is plotted as afunction of kr and for different order l,
in gure orderl are represented by the alphabet n .
The major advantage of using rigid sphere congu-ration is the
improved numerical conditioning as inequation 21 the spherical
coefficient Alm containsa term 1 /b l , and as bl is zero for some
cases inopen sphere conguration but not in the case of rigidspheres
[13] [20].
AES 138 th Convention, Warsaw, Poland, 2015 May 7–10Page 5 of
22
-
8/18/2019 Psychoacoustic Investigation on the Auralization of
Spherical Microphone Array Processing With Wave Field Synthesis
6/22
Singh Spherical array processing with WFS
Fig. 4: Mode strength for rigid sphere array [20]
2.9 . Discretization of Spherical Aperture andSpatial AliasingIn
practice we can sample a sphere only on a nite
number of microphone positions. Hence expressionfor spherical
coefficients Alm (k) which are denedby the integral over a unit
sphere in equation 21needs to be translated into a nite summation.
Theapproximation of nite integrals is known as quadra-ture and the
expression for A
lm(k) in terms of nite
summation is given as [6]:
Alm (k) ≈ Âlm (k) = 1bl (kr )
Q
q
wq ·s(r, Ω, k) ·Y ml (Ω)(23)
where Âlm (k) is the approximated spherical coeffe-cient, Q is
the number of microphone positions andwq are the quadrature
weights. The weights wq arethe factors which are used for
compensation in dif-ferent types of quadrature schemes so as to
approx-
imate the sound eld as closely as possible to thecontinuous
aperture.
Spatial sampling requires to be limited in bandwidth i.e.,
limited harmonic order l to avoid aliasing[20] [22]. Hence in order
to avoid spatial aliasing thefollowing equation must hold good
[6]
Alm (k) = 0 , wherel > L max (24)
Here Lmax is the highest order spherical coefficientof the sound
eld. The equation given in 24 mustbe ensured in sampling the sphere
otherwise spatialaliasing will corrupt the coefficients at lower
orders[22] [20] [6].
These quadrature allow us to perform sampling onthe sphere with
negligible or no aliasing as far asequation 24 holds good. In this
work we use Lebedevgrid.
QLb = 43
(Lmax + 1) 2 (25)
Using the approach of quadrature for discretizationof the sphere
we require a level limited sound eld inorder to get an aliasing
free sampling but for planewave sound elds the restrictions to a
maximum levelLmax is not true as we can see this from equation16
and equation 17 which involve innite number of non-zero spherical
coeffecients A lm (k). Hence somedegree of spatial aliasing does
occurs. But spheri-cal Bessel function j l (kr ) decay rapidly for
kr > l ,therefore the strength of coefficients in equation 16can
also be supposed to show a similar behavior forkr > l . Hence we
say that the aliasing error can beignored if the operation
frequency of the microphonearray follows kr
-
8/18/2019 Psychoacoustic Investigation on the Auralization of
Spherical Microphone Array Processing With Wave Field Synthesis
7/22
Singh Spherical array processing with WFS
number of plane waves with the assumption thatthey have
magnitude of w(Ω0 , k) and are arrivingfrom all the directions Ω 0
. Integrating equation 27for all the incident directions we have
the expressionfor spherical fourier coeffecients f lm (k)
f lm (k) = 4 πi l bl (kr ) S 2 w(Ω0 , k)Y ml (Ω0) (28)The
expression in equation 28 is termed as the spher-ical fourier
transfor of amplitudes w(Ω0 , k) and weexpress it as wlm (k)
wlm (k) = f lm (k) 1
4πi l bl (kr ) (29)
For obtaining the amplitude ws (Ωs , k) of any planewave
arriving from any direction Ω s we perform aninverse SFT of
equation 29
ws (Ωs , k) =∞
l=0
l
m = − l
f lm (k) · 1
4πi l bl (kr ).Y ml (Ωs )
(30)
ws (Ωs , k) is also called directivity function and de-scribes
the decomposed plane wave for a particulardirection Ω s . Ωs is
also known as steering directionof the microphone array, and tells
the direction forwhich plane wave decomposition is computed.
Further if we use equation 26 in equation 30 weget the
expression for plane wave decomposition interms of spherical
harmonic coefficients A lm (k).
ws (Ωs , k) =∞
l=0
l
m = − l
14πi l
Alm (k) ·Y ml (Ωs ) (31)
3. ERROR ANALYSISThe performance of spherical microphone arrays
is
affected by errors and artifacts. These errors ef-fect the plane
wave decomposition of the impulseresponse data measured by
spherical microphonearrays. In auralization the impact of these
errorsdregarde the quality of spatial sound reproduction.
3.1 . Measurement errorsThe measurement errors evaluated in the
listeningtest can be classied in two categories:
1. Sampling errors and artifacts: Due to nitenumber of
microphones imposed by discretiza-tion of the sphere, spatial
aliasing is observed.More over inaccurate positioning of the
micro-phone elements add on to give positioning errors
2. Microphone Noise: This is the error induce bynon-ideal
characteristics of the microphone andthe electronic noise of the
microphone elements.
Fig. 5: Errors in Spherical Microphone array mea-surement
3.2 . Description of measurement error functionIn this section
we follow the frame work given in
[20] and describe the mesurement errors mathemat-ically and
there contribution in spherical harmoniccoeffecients.
For the analytical description we assume an arbi-trary sound eld
is captured by an rigid sphere mi-crophone array. The frequency
domain output of a single microphone element whic is considered
tohave all the errors as depicted in gure 5 is
s(r, Ωq , k) + eq (32)
where k is the wave number, r is radius of thesphere, eq is the
microphone noise and Ω q is themicrophone position with positioning
errors. Thespherical harmonic coeffecients Alm (k) can be
cal-culated by using equation 23 which is explained in2.9. We
get
Âlm (k) = 1bl (kr ) (Qq=1 wq ·s(r, Ωq , k) ·Y ml (Ω) +
AES 138 th Convention, Warsaw, Poland, 2015 May 7–10Page 7 of
22
-
8/18/2019 Psychoacoustic Investigation on the Auralization of
Spherical Microphone Array Processing With Wave Field Synthesis
8/22
Singh Spherical array processing with WFS
Qq=1 wq ·eq ·Y ml (Ω)) (33)
In this equation Q is the number of microphones, wq
are the quadrature weights and bl (kr ) is the modestrangth for
rigid sphere conguration 2.8. Thecorrect microphone position as
dened by the sam-pling scheme are denoted by Ω q . Now we express
thesound eld s(r, Ωq , k) in terms of the correct spheri-cal
harmonic coeffecients A l m (k) using equation 20in section 2.8 and
substituting it in equation 33
Âlm (k) = 1bl (kr )∞l =0
lm = − l A l m (k) ·bl (kr )
× Q
q=1wq ·Y ml (Ωq ) ·Y ml (Ωq )
X
+ Qq=1 wq ·eq ·Y ml (Ω) (34)The term X is equivalent to the
orthonormality con-dition of spherical harmonics given in section
2.2. In[20] this term has been extended to nd the conti-bution of
aliasing error a and positioning error Ωand is expressed as
Qq=1 wq ·Y ml (Ωq ) ·Y ml (Ωq )
= δ l l ·δ m m + Ω(l ,m,l , m ),where l, l ≤Lmax= a (l ,m,l , m
) + Ω(l ,m,l , m ),where l ≤Lmax < l
(35)
Here δ l l and δ m m are Kronecker deltas. The max-imum level
Lmax is the highest level of the sphericalharmonic coeffecients A l
m (k) inside the sound eldwhich is sampled using Q microphone
positions, therelation for L and Q could be seen in section
2.9equation 25 for Lebedev grid. In the rst part of equation 35 the
level l < L max hence we do notsee aliasing error in that
expression. Also from Kro-
necker deltas we see that if Ω = 0 then Ω q and Ωqshould be
equal, hence Ω represents the positioningerror. In the lower part
of equation 35 we considerthat l > L max that spatial aliasing
would be there.Since l and l are different terms δ l l ·δ m m does
notappears in this part. The aliasing error a is givenas [20]
a (l ,m,l , m ) = Qq=1 wq ·Y ml (Ωq ) ·Y ml (Ωq ),
where l≤Lmax < l(36)
For positioning error we obtain it by subtractingequation 35
from equation 37 [20]
Ω(l ,m,l , m ) = Qq=1 wq ·Y ml (Ωq ) ·Y ml (Ωq ),where l ≤Lmax
< l(37)
Ω(l ,m,l , m )
= Qq=1 wq Y m
l (Ωq ) −Y ml (Ωq ) Y ml (Ωq ),where l ≤Lmax , l ≥0
(38)
Finally if use equation 35 in equation 34 and sep-arate the
summation over l we get the expressionspherical harmonic
coeffecients with all the errors[20]
Âlm (k) = 1bl (kr )
∞
l =0
l
m = − l
Al m (k) ·bl (kr ) ·δ l l ·δ m m
A ( s )lm (k )− signalcontribution+
1bl (kr )
∞
l =0
l
m = − l Al m (k) ·bl (kr ) · Ω(l ,m,l , m )
A (Ω)lm (k )− positioningerror+
1bl (kr )
∞
l =0
l
m = − l
Al m (k) ·bl (kr ) · a (l ,m,l , m )
A ( a )lm (k )− aliasingerror+
1bl (kr )
Q
q=1wq ·eq ·Y ml (Ωq )
A (
e )lm (k )− microphonenoise
(39)
In equation 39 the rst term refer to the errorfree contribution
in spherical harmonic coeffecients
ˆAlm (k). As the Kronecker deltas would be one,hence the rst
term simplies to Alm (k). All theother terms represent the errors.
From the equationitself we see that the errors depend on level l,
kr and
AES 138 th Convention, Warsaw, Poland, 2015 May 7–10Page 8 of
22
-
8/18/2019 Psychoacoustic Investigation on the Auralization of
Spherical Microphone Array Processing With Wave Field Synthesis
9/22
Singh Spherical array processing with WFS
the quadrature. Finally we can obtain the expres-sion for plane
wave decomposition by using equa-tion 39 and substituting it in
equation 31 which isthe expression for directivity function in
plane wavedecomposition. Each term A( ·)lm (k) in equation 39yields
the contribution of that particular error tothe direction weights
ws
w( · )s (Ωs , k) =∞
l=0
l
m = − l
14πi l ·A
( ·)lm (k) ·Y ml (Ωs )
(40)where Ωs is the steering direction of spherical mi-crophone
array and A ( · )lm (k) can any of the four dif-ferent components
in equation 39; A (s )lm (k), A
(Ω)lm (k),
A(a )
lm (k) or A(e )
lm (k). In order to get the effective in-uence of the
measurement errors on results of planewave decomposition we relate
the error contributionin equation 39 to corresponding signal
contributionand we look for relative error contribution by tak-ing
ratio of the squared absolute values of differenterrors with
respect to signal contribution [20].
Ea (kr ) = |w (a )
s (Ω s ,k )|2
w (s )
s (Ω s ,k )2 , E Ω(kr ) = |w (Ω)s (Ω s ,k )|
2
w (s )
s (Ω s ,k )2
Ee (kr ) = |w (e )
s (Ω s ,k )|2
w (s )
s (Ω s ,k )2 (41)
Equation 41 Noise to signal ratios are calculated.Figure 6 shows
the behaviour of different errors;noise, positioning and alising,
for different levels l.
On comparing various quadratures for spatial alias-ing,
microphone noise and position error. Lebe-dev quadrature is found
to have better robustnessagainst the errors in general. Due to
these charac-teristics we use Lebedev grid along with rigid
sphere.[20]
3.2.1 . Microphone noiseIt is important to not that the mode
strength2.8
have quite low values at higher levels l for low valuesof kr and
hence this amplies the the spherical har-monic coefficients 23
considerably therefore in sit-uations where microphone noise is
there, the noiseget amplied signicantly 6. The increase in
micro-phone error is more vigorous in the low kr rangethan in the
higher kr
Microphone noise also depends on the number of microphone used,
it was shown in simulations in
Fig. 6: Errors in Spherical Microphone array mea-surement
[20]
[20] that higher the number of microphone the bet-ter is its
robustness against noise. It is also seenthat the inuence of
microphone noise is the low-est when the maximum level l ≈ kr . For
higher krthe mode strengths some what converge towards 0db and
hence we can say theoritically the increasein error for higher kr
should not be too signicant.The quadratures used for discretization
of sphere do
not have any signicant affect in regard to the mi-crophone noise
and they all behave in a similar way.But as the microphone noise
affect more at low krwe can say that it limits the array
performance onlower frequencies.
3.2.2 . Spatial aliasingThe problem of spatial aliasing is quite
complex
in spherical microphone arrays. As continuous aper-ture is not
practically feasible hence we do discretiza-tion of the sphere,
using quadratures, which givesus a relation between number of
microphones andthe maximum level l. But this discretization of
the
sphere leads us to spatial aliasing problem. In [20][22]
analysis of sampling techniques for spherical mi-crophone arrays
and its effect on plane wave decom-position is explained. Aliasing
free techniques forlevel limited functions and some solution like
spatialanti aliasing lters for aliasing reduction are
prposedin[22]
Refer to gure 4 because of the nature of bl (kr ) the
AES 138 th Convention, Warsaw, Poland, 2015 May 7–10Page 9 of
22
-
8/18/2019 Psychoacoustic Investigation on the Auralization of
Spherical Microphone Array Processing With Wave Field Synthesis
10/22
Singh Spherical array processing with WFS
magnitude of spherical harmonic coeffecients of thesound
pressure becomes increasingly insignicant forl > kr , r is
radius of sphere. The aliasing error is ex-pected to be almost
negligible if operating frequencyrange of array satises the
condition kr l in gure plots of different levels are de-picted, and
spherical Bessel function curve for higherorders becomes more and
more damped. Now if welook at the spherical harmonic coeffecient
Alm (k)values for each l, in cases where kr > l , are
signi-cantly low due to the behaviour of spherical Besselfunction,
but it can be said that coeffecient valuesfor kr < l would be
present.
Although as l increases the spherical bessel functioncurve
settles more and more closer to x axis, but if full spectrum sound
wave is considered then to someextent for every kr < l ,
coeffecient values would bepresent, where l is not level
limited.
As we have a limitation by quadrature that QLb =43 (Lmax +
1)
2 , and because we can only have a lim-ited number of microphone
positions, hence planewave eld where coefficients for higher
frequenciesand higher l are present need a higher number of
mi-crophone positions to sample and obtain the coeffi-cients
successfully, but this is not possible because Qthat is the number
of microphone is limited. Hencecoeffecients the higher values of l
would be samplederroneously that means spatial aliasing would
occur.
As Bessel function for higher values of l are verylow for values
of kr that are higher than l, but stillcomponents for kr < l
would be there, hence we puta limit on kr that is kr ≤Lmax to
subdue this effect.Spherical coefficients of plane wave in equation
16are not level limited and should contain higher levell, but this
does not occur as the expression for planewave given above contains
bessel function whichhave very low signicant values for cases
wherel > kr . Hence levels till l ≈ kr would be denedin the
spherical harmonic coefficients of plane waveand others will be
insignicant or non existent.
Hence A lm (k) = 0, l > L max would hold good if thecondition
kr
-
8/18/2019 Psychoacoustic Investigation on the Auralization of
Spherical Microphone Array Processing With Wave Field Synthesis
11/22
Singh Spherical array processing with WFS
Fig. 2: Spherical Bessel function of the rst kind j l (x) (left)
and the second kind yl (x) (right) for orderl∈ {0, 3, 6} (x is
argument in the plots, x = kr)[8]
Âlm (k) = 1bl (kr )∞l =0
m = − ll Al m (k) ·bl (kr )
× Q
q=1wq ·Y ml (Ωq ) ·Y ml (Ωq )
Z(45)
Now the term Z is an approximation of orthonor-mality condition
of spherical harmonics therefore wecan say [22]
Qq=1 wq ·Y ml (Ωq ) ·Y ml (Ωq )
= δ l l ·δ m m + a (l ,m,l , m ),where l ≤Lmax < l(46)
This is an approximation hence we get an additionalterm a (l
,m,l , m ) which represents the aliasing er-ror induced because of
sampling. This aliasing erroris the same term which is the rst part
of the secondcase in equation 35. As in section 3.2.1 we said
thatmicrophone noise limits the performance of spheri-cal
microphone array in lower frequency regions orat lower kr , in the
case of spatial aliasing, array per-formance is limited at higher
frequencies or for largerradii.
3.2.3 . Positioning errorPositioning error comes into play when
microphone
element in a spherical microphone array are notplaced at the
correct position as dened by the sam-pling scheme(refer section
2.9). The position errorwould affect the directional correctness of
plane wavedecomposition and would nally corrupt the output.Because
of positioning error the required spacing be-tween the microphone
element on the sphere wouldget disturbed and the measurement of
impulse re-sponse would not be correct. From gure 6 the be-havior
of positioning error is shown, as is the casefor microphone noise
positioning error also have ahigher impact at lower kr values. In
the percep-tual evaluation we have simulated positining errorfor
elevation and azimuth separately. It is clearfrom the gure that
positioning error is inuencedby the transfor order or level l. As
the levels are in-creased the inuence of positioning error
increases.The mathematical expression for positioning errorsis
given in section 3.2. The impact of positioningerror is minimal if
we use kr ≈Lmax . It is concludedin [22] that the maximum
robustness against micro-phone noise and positioning error as well,
is obtainedfor plane wave decomposition with L ≈ kr , here Lis the
value of level l.
AES 138 th Convention, Warsaw, Poland, 2015 May 7–10Page 11 of
22
-
8/18/2019 Psychoacoustic Investigation on the Auralization of
Spherical Microphone Array Processing With Wave Field Synthesis
12/22
Singh Spherical array processing with WFS
4. AURALIZATIONIn order to auralize the sound eld keeping the
spa-tial characteristics of sound alive, method based onWFS is
applied in the present work. Impulse re-sponse based auralization
is used which allows us tokeep measurement and reproduction sites
indepen-dent of each other [6][8][3].
Impulse response based auralization : In thisapproach the room
acoustics are measured and ana-lyzed or impulse responses for the
room is measured.For reproduction the room characteristics which
areobtained from the impulse response measurementare combined which
dry audio channel and then re-produced. In more simpler words if
suppose there isan acoustic event in a particular environment
(say
concert hall) and now this acoustic scene (acousticscene can be
dened as the acoustic event along withsonic effect which are
induced by the environment)has to be recreated in another room then
if we knowthe room impulse responses (RIR), it is possible
torecreate the same acoustic scene by convolving thedry audio le
with the directional responses obtainedby plane wave decomposition
of RIR for that envi-ronment. Refer to Figure 3.
Now considering the work in this paper, in placeof using real
room measurements we have simulatedfree eld wave impact on the
spherical microphonearray. So the free eld impulse responses
whichare used in this paper are generated by our simula-tion
environment. Different errors and artifacts areadded during the
procedure of plane wave decompo-sition. Here the important fact to
note is that theprocessing of plane wave decomposition remains
thesame if we use real room data or free eld data andhence these
results hold good for auralization usingreal room acoustics.
In order to auralize the effect of these errors, im-pact of a
full spectrum free eld sound wave ona sampled spherical microphone
array is simulated.The direction of propagation of sound wave is Ω
=(azimuth, elevation ) = ( ϕ,ϑ) = (0 ◦ , 90◦ ) i.e., thesource lies
on the horizontal plane with no verticalelevation. Plane wave
decomposition is done for 12directions including the the direction
of proagation.The simulation is done for free eld case. Figure
4shows the 12 different direction for which the PWDof spherical
microphone array data is done. For sim-ulation the spherical
microphone array radius r is
Fig. 3: Impulse response based auralization [3].
taken as 15 cm. Free eld impulse responses for alldifferent
cases were obtained for 12 different planewave decomposed
directions. These responses fordifferent directions when convovled
with the test au-dio signal will impose the behavior of free eld
soundeld on it. As result we get a 12 channel audio le,where each
channel represents to a directional senseof the test audio signal
in space.
4.1 . Aspect to be perceptually evaluated
The basic parameters set for simulation were de-signed keeping
in mind the rendering tool. We sim-ulate plane wave decomposition
for different errorcases. The base transform order or level l is
takenas 3, this comes from the fact that our reproductionsystem has
a spatial aliasing limit of 1000 Hz and forspherical array of
radius r = 15 cm we have a value
AES 138 th Convention, Warsaw, Poland, 2015 May 7–10Page 12 of
22
-
8/18/2019 Psychoacoustic Investigation on the Auralization of
Spherical Microphone Array Processing With Wave Field Synthesis
13/22
Singh Spherical array processing with WFS
Fig. 4: Depiction of PWD for 12 direction
of kr ≈ 3. Now for a given order L, bl (kr ) has theshape of a
bandpass lter ( except level zero, whichbehaves as a low-pass lter,
with the peak aroundl ≈ kr ). Hence when a plane wave is
approximatedwith a nite summation of order l = L in spheri-cal
harmonics domain the reconstructed amplitudes
are expected to be attenuated at frequencies corre-sponding to
kr > L [23]. Therefore to be in line withthis we keep the base
transform order L = 3 consid-ering the spatial aliasing limit of
WFS reproductionset up.
In order to establish a mechanism for comparison,we simulated
and auralized an ideal full spectrumwave impact on a continuous
aperture spherical mi-crophone array for order L = 3. The impulse
re-sponses of ideal full spectrum wave were used to getour
reference signal against which all comparisonsare made. For
evaluation lets rst dene the ques-
tions for which we want to get answers from thislistening
test.
1. The rst question is although if we have ourmicrophone array
with enough number of mea-surement positions on the sphere as dened
by2.9 then also we face spatial aliasing (refer sec-tion 3.2.2) as
full spectrum audio is auralized
hence the limitations kr < l would not be fol-lowed, we want
to know the perceptual effect of spatial aliasing.
We investigate is the perceptual effect of chang-ing transform
order l for xed number of micro-phones. For these cases number of
microphonefor spherical array was xed to be Q = 302. Thehighest
transform order auralized for which weperceptually analyzed the
signal is L = 6, forwhich according to equation 25, Q ≈ 66 is
suf-cient. The parameter Q i.e the number of mi-crophones is 302
because for rstly it is abovethe minimum number of microphones
requiredby all conditions of L analyzed in the listeningtest and
secondly with a minimum 302 position
for our base transform level L = 3 there is nonoticeable spatial
aliasing. The number of mi-crophones is taken as 302, because the
rst testwhich we do is used to establish a minimum re-quired number
of microphone where no aliasingis perceptually observed. For our
base trans-form order L = 3 at 302 sampling points therewas no
aliasing and this fact is substantiated bythe listening test
also.
2. For microphone noise, we add additive whitegaussian noise to
the frequency domain outputof the sampled sphere and then continue
with
the process of plane wave decomposition. Twoquestion are there
for which we attempt to ndanswers.
• For a xed transform level and a xednumber of microphone
positions what isthe level of minimum microphone noisewhich
degrades the over all audio qual-ity becomes perceptually signicant
or forwhat value it remains percetually insignif-icant when test
against the base transformlevel l = 3.
• The other question we investigate is the ef-fect of transform
level l on the microphonenoise. We change the transform order
forxed noise level which is obtained in theabove step and see how
it impact for dif-ferent levels
3. The last aspect which we check is positioningerrors (refer
section ?? ) and equation 38. The
AES 138 th Convention, Warsaw, Poland, 2015 May 7–10Page 13 of
22
-
8/18/2019 Psychoacoustic Investigation on the Auralization of
Spherical Microphone Array Processing With Wave Field Synthesis
14/22
Singh Spherical array processing with WFS
positioning error are checked against varyingtransform orders L
= 3 , 4, 5, 6.
The positioning error is added to the quadraturevalues obtained
from Lebedev grid structure.Position error is an angular offset in
azimuthand elevation which is added to Ω = ( ϕ,ϑ). Po-sitioning
error values are normally distributedwith dened degree of standard
deviation (SD)that is, we simulate the sound eld for
normallydistributed error values with particular level of standard
deviation. Two types of positioningerrors are separately evaluated
for their percep-tual effect on the auralized sound.
• Positioning error in Azimuth: Here the er-ror is added only in
azimuth φ• Positioning error in Elevation: Error isadded only in
elevation ϑ
For both these errors a maximum value of erroris investigated
for base transform order L = 3which does not induces any over all
dregrada-tion in the audio quality in comparison to thereference,
and this error level is investigated fordifferent transform
order.
4.2 . ProcessingThe ow diagram 5 shows the sequence of
process-
ing done for auralization spherical microphone arraydata through
WFS system. The block Positioningerror and Microphone noise in gure
5 are the ad-dition of noise and positioning error, noise is
addedin the second stage to the pressure responses of mi-crophone
elements. Positioning error is added in therst stage when
discretization process is done andquadratures are calculated.
4.3 . Reproduction set upThe spatial sound eld reproduction in
our study isrealized using wave eld synthesis (WFS). The waveeld
synthesis set up consisted of an loud speakerarray of 88 elements.
The inter element spacing be-tween the loudspeakers is 18 cm
(approx.). The spa-tial aliasing limit upto which the WFS
reproductionset up can synthesize the sound elds accurately
isapproximately 1000 Hz.
The reproduction is done in the WFS lab. Figure 6
As shown in picture 6 the layout of loudspeakers isin a
horizontal plane. The height of this loud speaker
Fig. 5: Processing chain for auralization of sphericalmicrophone
array
layout from the ground is approximately equal to thehead level
when a test subject is in a sitting position.Hence the horizontal
plane contains listener in themiddle surrounded by this array of
loud speakers.
5. LISTENING TEST
5.1 . Structure of listening testThe listening test was
conducted using theMUSHRA (Multiple Stimuli with Hidden
referenceand Anchor) methodology [7]. The methodology isused for
the subjective evaluation of audio quality.Here the listener is
presented with a reference whichis labeled as such in the test,
then there is an anchorand a certain number of test samples which
containsthe hidden reference.
The reference is the audio track against which allother test
samples are compared and graded. There-fore reference is the bench
mark and according to itall comparisons are done.
Anchor is the audio track which is the worst case
AES 138 th Convention, Warsaw, Poland, 2015 May 7–10Page 14 of
22
-
8/18/2019 Psychoacoustic Investigation on the Auralization of
Spherical Microphone Array Processing With Wave Field Synthesis
15/22
-
8/18/2019 Psychoacoustic Investigation on the Auralization of
Spherical Microphone Array Processing With Wave Field Synthesis
16/22
Singh Spherical array processing with WFS
Spatial aliasing
I. Spatial Aliasing Vs Number of MicrophonesTra ck Te st C on
dit io n 2 Te st C on di ti on 3 Te st C on di ti on 4 Te st C on
di ti on 5 Tes t Co nd it io n 6
(Anchor)Test Condition 1 (Reference)
L=3 Mic=302 L=3 Mic=194 L=3 Mic=86 L=3 Mic=26 Anchor L=3
Continuous aperture(a) castanet castanet castanet castanet castanet
castanet(b) speech speech speech speech speech speech(c) music
music music music music music
II. Spatial Aliasing Vs Transform order(L)Tra ck Te st C on dit
io n 2 Te st C on di ti on 3 Te st C on di ti on 4 Te st C on di ti
on 5 Tes t Co nd it io n 6
(Anchor)Test Condition 1 (Reference)
L=3 Mic=302 L=4 Mic=302 L=5 Mic=302 L=6 Mic=302 Anchor L=3
Continuous aperture(d) castanet castanet castanet castanet castanet
castanet(e) speech speech speech speech speech speech(f) music
music music music music music
Table 2: Test conditions for perceptual evaluation of spatial
aliasing
Microphone noiseI. Perceptual analysis of different microphone
noise level
Tra ck Te st C on dit io n 2 Te st C on di ti on 3 Te st C on di
ti on 4 Te st C on di ti on 5 Tes t Co nd it io n 6(Anchor)
Test Condition 1 (Reference)
L=3 Mic=302Noise=-80dB
L=3 Mic=302Noise=-65dB
L=3 Mic=302Noise=-55dB
L=3 Mic=302Noise=-40dB
Anchor L=3 Continuous aperture
(g) castanet castanet castanet castanet castanet castanet(h)
speech speech speech speech speech speech(i) music music music
music music music
II. Microphone Noise Vs Transform orderTra ck Te st C on dit io
n 2 Te st C on di ti on 3 Te st C on di ti on 4 Te st C on di ti on
5 Tes t Co nd it io n 6
(Anchor)Test Condition 1 (Reference)
L=3 Mic=302Noise=-80dB
L=4 Mic=302Noise=-80dB
L=5 Mic=302Noise=-80dB
L=6 Mic=302Noise=-80dB
Anchor L=3 Continuous aperture
(j) castanet castanet castanet castanet castanet castanet(k)
speech speech speech speech speech speech(l) music music music
music music music
Table 3: Test conditions for perceptual evaluation of micophone
noise
Positioning errorI. Positioning Error (Elevation) Vs Transform
order
Tra ck Te st C on dit io n 2 Te st C on di ti on 3 Te st C on di
ti on 4 Te st C on di ti on 5 Tes t Co nd it io n 6(Anchor)
Test Condition 1 (Reference)
L=3 Mic=302SD=0.15
L=4 Mic=302SD=0.15
L=5 Mic=302SD=0.15
L=6 Mic=302SD=0.15
Anchor L=3 Continuous aperture
(m) castanet castanet castanet castanet castanet castanet(n)
speech speech speech speech speech speech(o) music music music
music music music
II. Positioning Error (Azimuth) Vs Transform orderTra ck Te st C
on dit io n 2 Te st C on di ti on 3 Te st C on di ti on 4 Te st C
on di ti on 5 Tes t Co nd it io n 6
(Anchor)Test Condition 1 (Reference)
L=3 Mic=302SD=0.15
L=4 Mic=302SD=0.15
L=5 Mic=302SD=0.15
L=6 Mic=302SD=0.15
Anchor L=3 Continuous aperture
(p) castanet castanet castanet castanet castanet castanet(q)
speech speech speech speech speech speech(r) music music music
music music music
Table 4: Test conditions for perceptual evaluation of
positioning error
AES 138 th Convention, Warsaw, Poland, 2015 May 7–10Page 16 of
22
-
8/18/2019 Psychoacoustic Investigation on the Auralization of
Spherical Microphone Array Processing With Wave Field Synthesis
17/22
Singh Spherical array processing with WFS
varying from 23 to 30 years, giving a mean age of 25.42. Among
the test subject none had any kind of hearing impairment. All the
test subjects were stu-dents of TU Ilmenau. 24% of the test subject
hadsome kind of listening test experience but not withspatial sound
reproduction setup. All the test sub- ject were given an
introductory overview of spatialsound systems and were explained
the listening testset up. This kind of orientation was felt
importantas the listening test and the wave studio lab at rstalways
give an impression of three dimensional sur-round sound
auralization, but in reality our work ismore focus to know the
perceptual impact of vari-ous noise and artifacts. Hence an
introductory levelof information and main motive of the listening
testwas briey explained to the listeners
6. EVALUATION
6.1 . Test subject screeningOut of 21 participants, 14 were able
to identify thehidden reference and anchor and 7 did not
identifyeither one or both of them. Hence scores for 14
testsubjects were considered valid and the other 7 wereconsidered
as outliers.
6.2 . Statistic for the evaluation of listening testThe
distribution of the test data is checked and it
was found that the test data approximately followsa normal
distribution for all six categories and allindividual conditions.
The basic statistical formula-tion in this part of our analysis is
as follows. Themean X tc is the mean for a particular track t and
aparticular test condition c. Refer tables 2, 3, 4, andS tc is the
standard deviation.
X tc = 1N
z
xztc (47)
S tc = N z x2ztc −( z x2ztc )2N (N −
1) (48)
where t : trackc: test conditionz: index of the test subjectN :
Number of test subjects
6.3 . DenitionsStatistical signicance ( p −value ): The
statisticalsignicance of a result is the probability that the
ob-
served relationship (e.g., between variables) or a dif-ference
(e.g. between means) in a sample occurredby pure chance (”luck of
the draw”), and that inthe population from which the sample was
drawn,no such relationship or differences exist. The higherthe
p-value, the less we can believe that the observedrelation between
variables in the sample is a reliableindicator of the relation
between the respective vari-ables in the population.Condence
Interval: The condence interval givesus the information about the
reliability of the calcu-lated mean. It is dened as the range in
which themean would exist with a given probability if the testis
repeated. Calculation of condence interval:
X tc −δ tc , X tc + δ tc δ tc = t pS tc
√ N (49)The value of t p is extracted from the t-table
distri-bution according to the number of test subjects N .
Analysis of variance (ANOVA) : The purpose of analysis of
variance (ANOVA) is to test for signif-cant differences between
means. In ANOVA thestatistical signiffcance between means are
tested bycomparing the (i.e., analyzing) variances. In order
toestablish that the data obtained for different condi-tions show
perceptual difference, we further analysethe measured
characteristics. The 2-way-ANOVAanalysis we get three p
−values (also explained in
as statistical signiffcance), if p-value is near zerothis means
that the associated null hypothesis is indoubt. A sufficiently
small p −value suggests thatatleast one column sample mean is
signicantly dif-ferent than that of the other column sample
means.Interpreting for the different test conditions used inour
test. Now if p-value is sufficiently small than itproves the fact
that there is some effect due to con-ditions imposed by transform
order. The p-valuefor the test conditions is zero it proves the
fact thataffect of transform order is signicant.
6.4 . Spatial aliasing vs number of microphoneWe analyse the the
impact of changing transform or-der on spatial aliasing. Figure 7
shows us that theimpact of spatial aliasing increases as we
increasethe transform order for microphone array process-ing. In
this case the number of sampling positionis xed to 302. It is
sufficiently proved in this casethat for a transform order of L = 3
and with spher-ical sampling for 302 position there is no
perceptual
AES 138 th Convention, Warsaw, Poland, 2015 May 7–10Page 17 of
22
-
8/18/2019 Psychoacoustic Investigation on the Auralization of
Spherical Microphone Array Processing With Wave Field Synthesis
18/22
Singh Spherical array processing with WFS
aliasing effect. It is important to note that the maxi-mum
number of required sample positions accordingto lebedev grid
structure is 66 for L = 6 (the highesttransform order auralized).
Theoretically sphere dis-cretization for 302 position should be
sufficient fora aliasing free plane wave decomposition. We seefrom
the plots that speech signal get worst affectedby spatial aliasing
artifacts. The behavior shown bymusic and castanets is almost
similar. The con-dence interval for music and castanet overlap.
Wedo a 2-way ANOVA analysis for spatial aliasing caseand look for
statistical signicance. We see from thetable that p−value for
transform order is zero or al-most zero this signies the fact that
the main factoraffecting our test cases is the transform order.
Fig. 7: Aliasing vs Transform order
On looking at the second column we see that p-valuefor test
items is also quite close to zero as we assumea signicance level of
95% for any test data to be sta-tistically signicant, that means
p-value below 0.05would be considered signicant. Hence we that
testtracks also have an effect on the perceptual resultsof spatial
aliasing.
Table 5: 2-way ANOVA for Spatial Aliasing
6.5 . Evaluation of positioning errorThe affect of positioning
error on auralization of
plane wave decomposition is tested separately for 1.Positioning
error in elevation 2. Positioning error inazimuth The condence
interval plots for positioningerror are shown in gure 8, and gure
9
Fig. 8: Analysis of positioning error in azimuth forall three
test items
Comparing both these gures we see a obvious pat-tern, rst is
that in both these error cases increas-ing the transform order
degrades the audio quality.
But the next interesting part is that the slope or ex-tent to
which error in elevation corrupts the audioquality is not the same
in azimuth. In the case of Elevation error, rstly all three
different test itemshave similar perceptual performance. There
overlap-ing in condence intervals further substantiate
thisconclusion. On the other hand in azimuth we seea different
behavior, for speech and music it followsthe same trend and seems
as if elevation and az-imuth have same effect, on speech and music
but forthe castanets, azimuth error does not seem to de-grade the
signal in the same way as it is for othertracks. The condence
intervals although overlapwith each other but only to a small
extent. Consid-ering the above discussion in mind we are temptedto
investigate more on this issue. In order to estab-lish whether
perceptual effect cast by these two errorcases are similar or not,
we rst check for the hiddensignicance among the different test
items in each er-ror case. Although in the case of elevation error
if we look at the plots closely the condence interval
AES 138 th Convention, Warsaw, Poland, 2015 May 7–10Page 18 of
22
-
8/18/2019 Psychoacoustic Investigation on the Auralization of
Spherical Microphone Array Processing With Wave Field Synthesis
19/22
Singh Spherical array processing with WFS
Fig. 9: Analysis of positioning error in elevation forall three
test items
among different test items i.e, music, speech, andcastanet
overlap to a relatively high degree, hencewe can fairly conclude on
the basis of condence in-terval plots that in elevation error
condition 3,4, and5 (which corresponds to transform order 4,5 and
6)share a high degree of similarity in there corruptivebehaviour
towards the auralization of plane wave de-composition. In the case
of azimuth we need more
evidence to establish the extent of impact. For az-imuth error
we do a 2 way ANOVA analysis. In thisanalysis we compare effect of
test items and the ef-fect of different conditions
simultaneously.2-way ANOVA: In our test we assume the
condenceinterval level of 95% hence, any p-value bigger than0.05
that is considered high.
Table 6: 2-way ANOVA analysis for azimuth error
The second p-value corresponds to the effect causedby test
items, and second pvalue is 0.0006, this isalso very small value
and hence, it suggests that dif-ferent test items do have an impact
on the completetest scenario for azimuth error. The third value
cor-responds to the fact that there is no interaction be-tween test
items and test conditions. As we can
observe that the p-value for third category is quitehigh. On
performing 2-way-ANOVA on elevationerror we get the following
values of statistical signif-icance.
Table 7: 2-way ANOVA analysis for elevation error
The statistical signicance values in the case of el-evation
suggest that only the test condition havethere inuence on the
perceptual scores and testitem do not have any impact.
6.6 . Microphone noiseIn the perceptual analysis of noise we rst
conductednoise level tests for different levels of noise.
Thetransform order was kept constant at L = 3, anddifferent levels
of noise were tested. Figure 10 givesthe mean and condence level
plots for the differentlevel of noise.
Fig. 10: Noise level
It is observed from the gure that as the degree of noise is
increased the perceptual response also goesdown. For all the test
items the response towardsnoise is somewhat similar. One case
stands out andshows an equivalent perceptual performance in
com-parison to Reference, that is case when noise level is-80 dB,
i.e.,it is also observed that noise level of -80
AES 138 th Convention, Warsaw, Poland, 2015 May 7–10Page 19 of
22
-
8/18/2019 Psychoacoustic Investigation on the Auralization of
Spherical Microphone Array Processing With Wave Field Synthesis
20/22
Singh Spherical array processing with WFS
dB is perceptually indistinguishable in comparisonto refernce.
the reference
Table 8: 2-way ANOVA analysis for Noise levels
Table 8 gives the values for 2-way ANOVA test.From the p-values
it is evident that test items had nohidden signicant inuence. And
as expected onlythe noise levels cast a signicant impact on the
per-ceptual evaluation. In gure 11 we have compareda noise level of
-80dB against transform order whichvaries from 3...6.
Fig. 11: Noise vs transform order
The plot show all the test items and there perceptualdegradation
when transform orders are increased.The noise gets heavily effected
even when the trans-form order is changed from 3 to 4. At a
transformorder of 3 the test item showed equivalent percep-tual
performance as compared to the reference. A2-way ANOVA test further
substantiates the signif-icant impact of transform orders on
noise.The signicance values in table 9 show the signif-icance of
transform order on perceptual evaluationof different test
items.
7. CONCLUSIONSpherical microphone arrays were studied and
anal-
Table 9: 2-way ANOVA analysis for Noise levels vsTransform
order
ysed. Our aim was to simulate errors in the simu-lation
environment and then design a listening testto do a perceptual
evaluation in order to establishwhether in reality any particular
said parameter hadany perceptual effect or not and to what
extent.There are three errors which affect its performanceare
evaluated in this work
• Spatial aliasing• Positioning error• Microphone noise
A full spectrum wave impact is sampled on a spheri-cal
microphone array and plane wave decompositionfor 12 direction is
done. We simulated many testcases and analysed those test cases our
selves. Afterindetailed analysis and auralization we design
thelistening test. For all the purposes of auralizationthe
transform order of L = 3 was selected as the
base transform order. WFS system has a spatialaliasing frequency
of 1000 Hz, and in order to havealiasing free sampling, not only a
sufficient numberof microphone positions is required but product of
wavenumber and radius of the sphere kr ≈ L, thisis one of the
conditions which need to be satisedin spherical microphone arrays,
on the other sidethe WFS spatial aliasing should also not be
crossed.The model lters have a shape of bandpass ltersexcept l = 0.
Therefore, keeping L = 3 would re-strict the bandwidth on spherical
microphone arrayside also and that is why for L = 3 we do not
seeany signicant corruption of the signal specically
by spatial aliasing artifacts. Three different type of audio
tracks were used. They are music, speech andcastanet. Following
conclusions were drawn on thebasis of listening test.
1. Spatial aliasing get magnied as we increase thetransform
order in spherical microphone arrayprocessing
AES 138 th Convention, Warsaw, Poland, 2015 May 7–10Page 20 of
22
-
8/18/2019 Psychoacoustic Investigation on the Auralization of
Spherical Microphone Array Processing With Wave Field Synthesis
21/22
Singh Spherical array processing with WFS
2. The errors were evaluated for their percep-tual identiability
as the transform order is in-creased. It is found from the test
results thatmicrophone noise gets amplied with the in-crease in
transform order.
3. The simulated spherical microphone array wasbased on lebedev
grid sampling scheme and itis noticed that even after having way
more thanthe required number of sampling positions alias-ing
effects were observed. It is concluded thatthe number of microphone
positions as per thecalculation of lebedev grid do not
necessarilyprovide a aliasing free impulse response
mea-surement.
4. The degradation of perceptual quality with in-creasing number
of transform order is verysteep.
5. Positioning errors in azimuth and elevation alsoget amplied
with increasing transform order.
6. Azimuth error is found out to be inuenced bythe audio tracks
also (substantiated by 2 wayANOVA test).
7. It was observed that in all the cases speech isaffected badly
by all the error categories equally.
8. REFERENCES
[1] Benjamin Bernschtz, Christoph Prschmann,Sascha Spors, Stefan
Weinzierl. SOFiA-SoundField Analysis Toolbox. In International Con-
ference on Spatial Audio , Detmold, Germany,November 2011.
[2] D. de Vries and E. M. Hulsebos. Auralizationof room
acoustics by wave eld synthesis basedon array measurements of
impulse responses.In 12th European Signal Processing Conference
(EUSIPCO) vol. no. 12, 2004, eng.[3] E. Hulsebos, Auralization
using wave eld syn-
thesis , Ph.D. dissertation, Delft University of Technology,
2004.
[4] J. Sonke, Variable acoustic by wave eld syn-thesis , Ph.D.
dissertation, Delft University of Technology, 2000.
[5] E. G. Williams, Fourier Acoustics: Sound Ra-diation and Near
eld Acoustical Holography .Academic Press, 1999.
[6] F. Melchior, Investigations on spatial sound de-sign based
on measured room impulse responses ,Ph.D. dissertation, TU Ilmenau,
2011.
[7] I. Recommendation, 1534-1: Method for thesubjective
assessment of intermediate qualitylevel of coding systems, Tech.
Rep., 2003.
[8] O. Thiergart, Sound eld analysis on the basis of a spherical
microphone array for auralization applications , M.Sc. Thesis, TU
Ilmenau, 2007.
[9] E. Skudrzyk, The foundations of acoustics: ba-
sic mathematics and basic acoustics . Springer-Verlag, 1971.
[10] D.T.Blackstock, Fundamentals of Physical Acoustics . John
Wiley, 2000.
[11] J. Feldman, Solution of the wave equation byseparation of
variables-lecture Notes, Depart-ment of Mathematics, University of
BritishColumbia, January 2007.
[12] F. Zotter, Analysis and synthesis of sound- radi-ation with
spherical arrays ,”Ph.D. dissertation,University of Music and
Performing Arts, 2009.
[13] B.Rafaely. Plane-wave decomposition of thesound eld on a
sphere by spherical convolution.In Journal of the Acoustical
Society of America ,vol. 116, no. 4 I, pp. 2149-2157, 2004.
[14] J.Meyer and T.Agnello. Spherical microphonearray for
spatial sound recording. In Audio En-gineering Society Convention
115 , Oct 2003.
[15] M.A.Poletti. Three-dimensional surroundsound systems based
on spherical harmonics.In J. Audio Eng. Soc , vol. 53, no. 11,
pp.1004-1025, 2005.
[16] R.Collins, Mathematical Methods for Physicists and
Engineers , ser. Dover books on physics.Dover Publications,
1999.
[17] G.V.Singh, Psychoacoustic Investigation on the Auralization
of Spherical Microphone Array data using Wave Field Synthesis ,
M.Sc. Thesis,TU Ilmenau, 2007.
AES 138 th Convention, Warsaw, Poland, 2015 May 7–10Page 21 of
22
-
8/18/2019 Psychoacoustic Investigation on the Auralization of
Spherical Microphone Array Processing With Wave Field Synthesis
22/22
Singh Spherical array processing with WFS
[18] J. Driscoll and D. Healy, Computing fouriertransforms and
convolutions on the 2-sphere,Advances in Applied Mathematics , vol.
15, no.2, pp. 202-250, 1994.
[19] T. Abhayapala and D. B. Ward. Theory anddesign of high
order sound eld microphonesusing spherical microphone array. In
Acoustics,Speech, and Signal Processing (ICASSP), 2002 IEEE
International Conference , vol. 2, May2002, pp.
II-1949-II-1952.
[20] B. Rafaely, Analysis and design of spherical mi-crophone
arrays, In Speech and Au- dio Pro-cessing, IEEE Transactions , vol.
13, no. 1, pp.135143, Jan 2005.
[21] J. Meyer and G. Elko, A highly scalable spheri-cal
microphone array based on an orthonormaldecomposition of the sound
eld in Acoustics.In Speech, and Signal Processing (ICASSP),2002
IEEE International Conference , vol. 2,May 2002.
[22] B. Rafaely, B. Weiss, and E. Bachmat, Spa-tial aliasing in
spherical microphone arrays. InIEEE Transactions on Signal
Processing vol.55, no. 3, pp. 10031010, March 2007
[23] A. Avni, J. Ahrens, M. Geier, S. Spors, H.
Wierstorf, and B. Rafaely. Spatial perception of sound elds
recorded by spherical microphonearrays with varying spatial
resolution. In The Journal of the Acoustical Society of America
,vol. 133, no. 5, pp. 27112721, 2013.
AES 138 th Convention, Warsaw, Poland, 2015 May 7–10