Embed Size (px)
DESCRIPTION
immersive kinematics
Citation preview
IMMERSIVE PROTOTYPE DESIGNARCH 746 : BODY SCANNER
PUNCH-LINE
SHELLY GUPTA + SHUAI LI + PREETHI PATHIREDDY + SARAH WAN
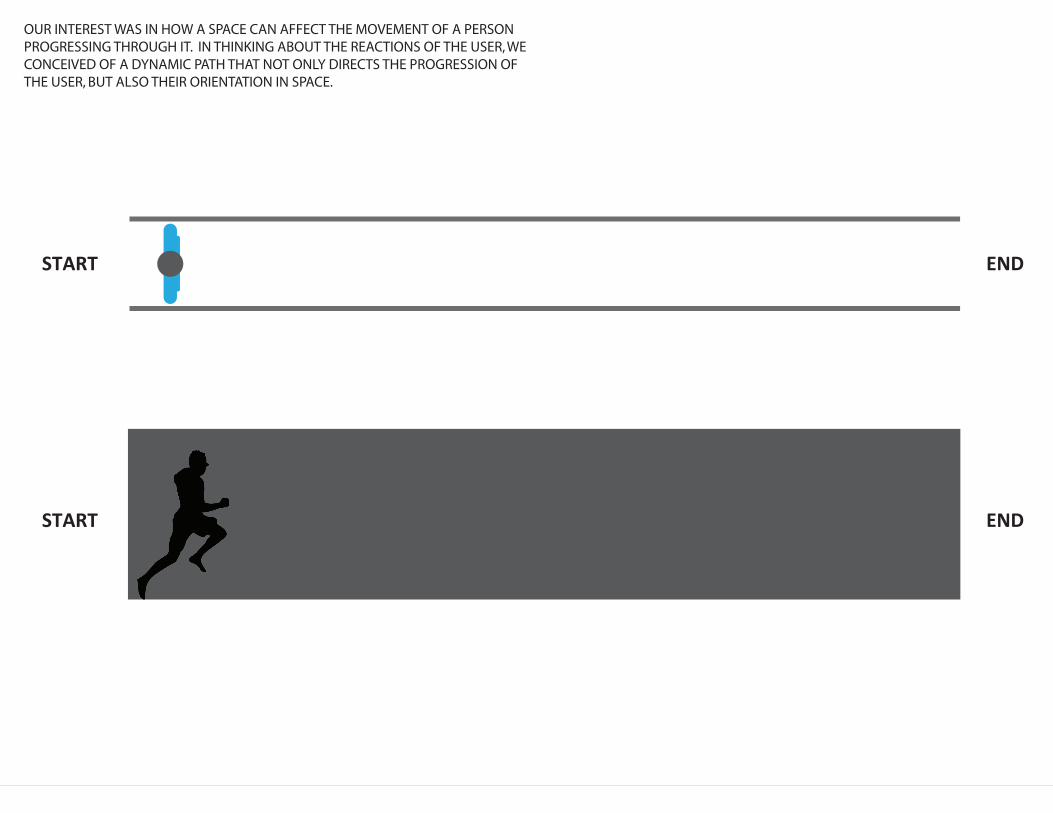
START END
START END
OUR INTEREST WAS IN HOW A SPACE CAN AFFECT THE MOVEMENT OF A PERSON PROGRESSING THROUGH IT. IN THINKING ABOUT THE REACTIONS OF THE USER, WE CONCEIVED OF A DYNAMIC PATH THAT NOT ONLY DIRECTS THE PROGRESSION OF THE USER, BUT ALSO THEIR ORIENTATION IN SPACE.
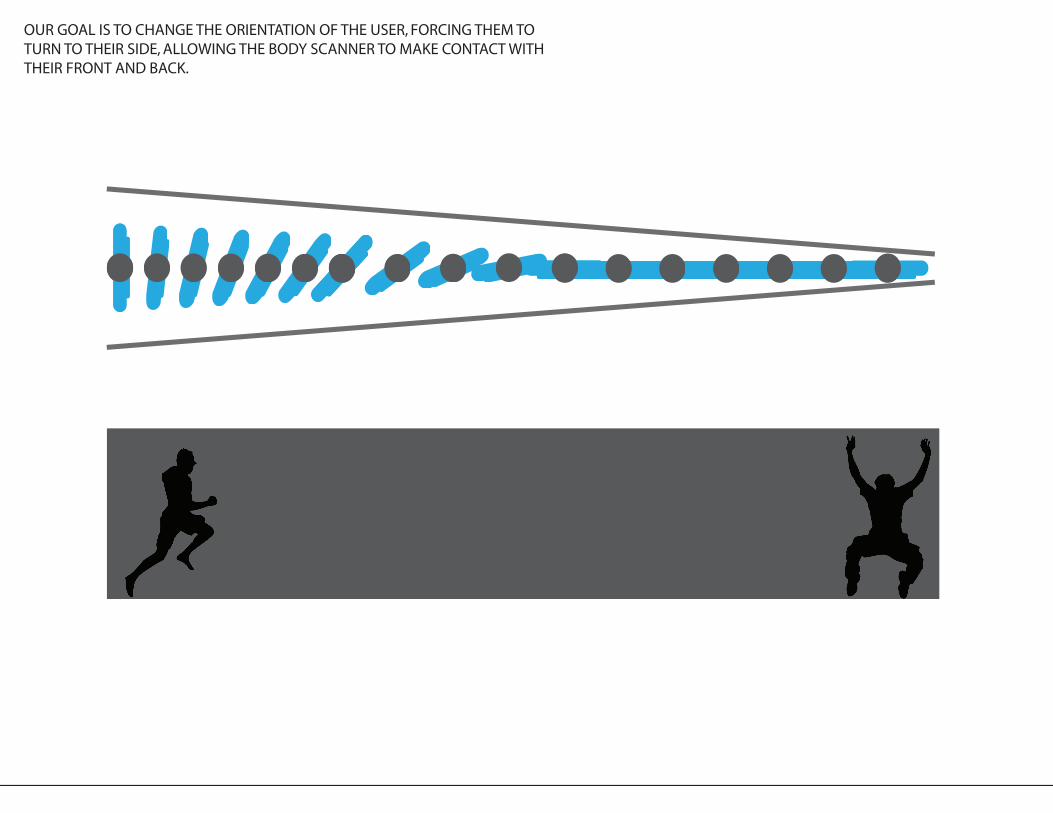
OUR GOAL IS TO CHANGE THE ORIENTATION OF THE USER, FORCING THEM TO TURN TO THEIR SIDE, ALLOWING THE BODY SCANNER TO MAKE CONTACT WITH THEIR FRONT AND BACK.
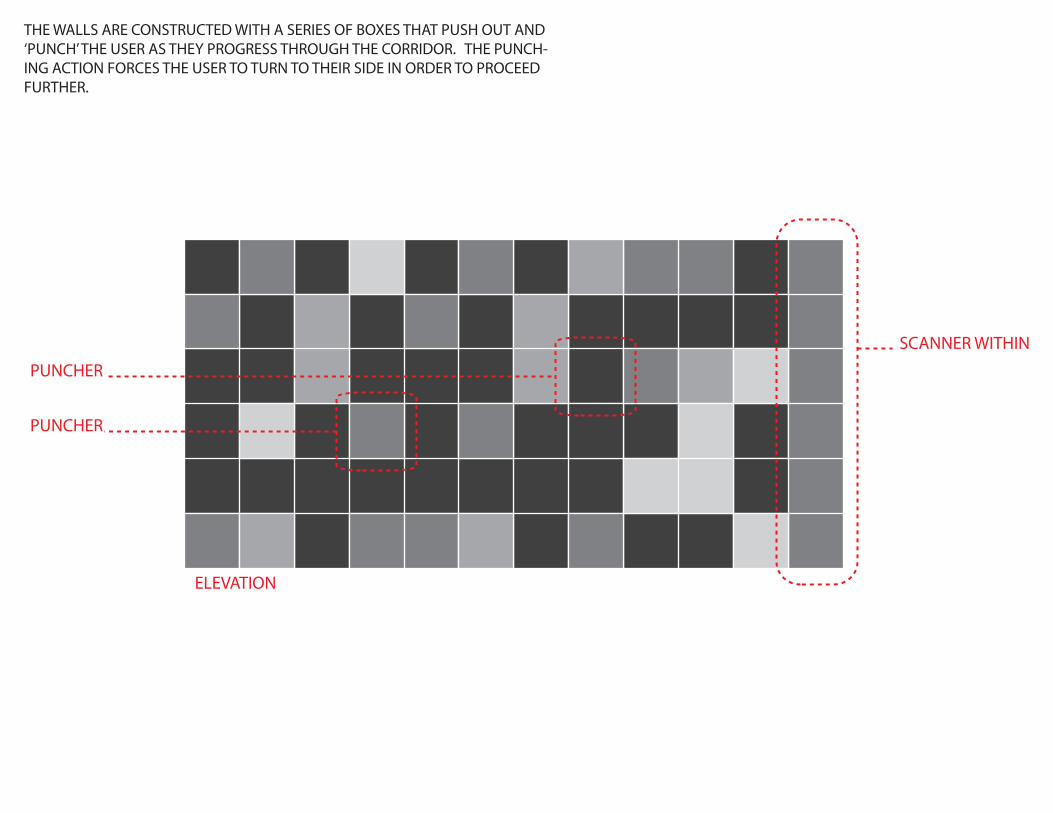
SCANNER WITHIN
PUNCHER
ELEVATION
PUNCHER
THE WALLS ARE CONSTRUCTED WITH A SERIES OF BOXES THAT PUSH OUT AND ‘PUNCH’ THE USER AS THEY PROGRESS THROUGH THE CORRIDOR. THE PUNCH-ING ACTION FORCES THE USER TO TURN TO THEIR SIDE IN ORDER TO PROCEED FURTHER.
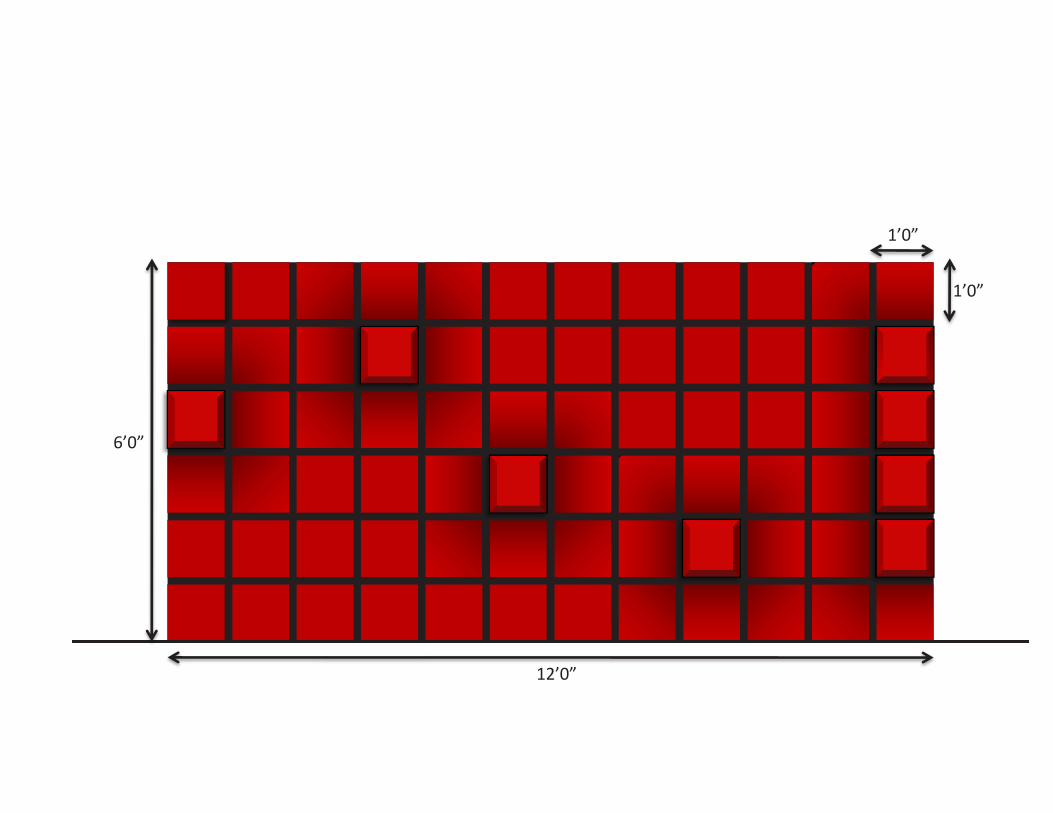
1’0”
1’0”
6’0”
12’0”
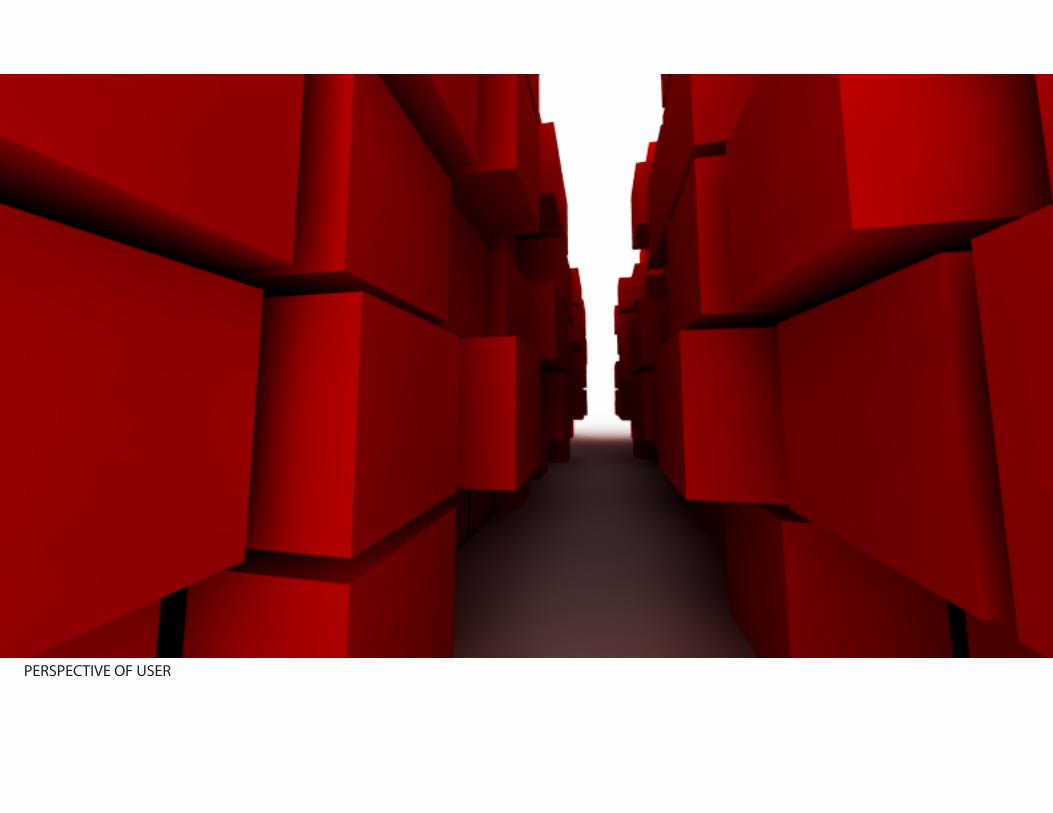
PERSPECTIVE OF USER
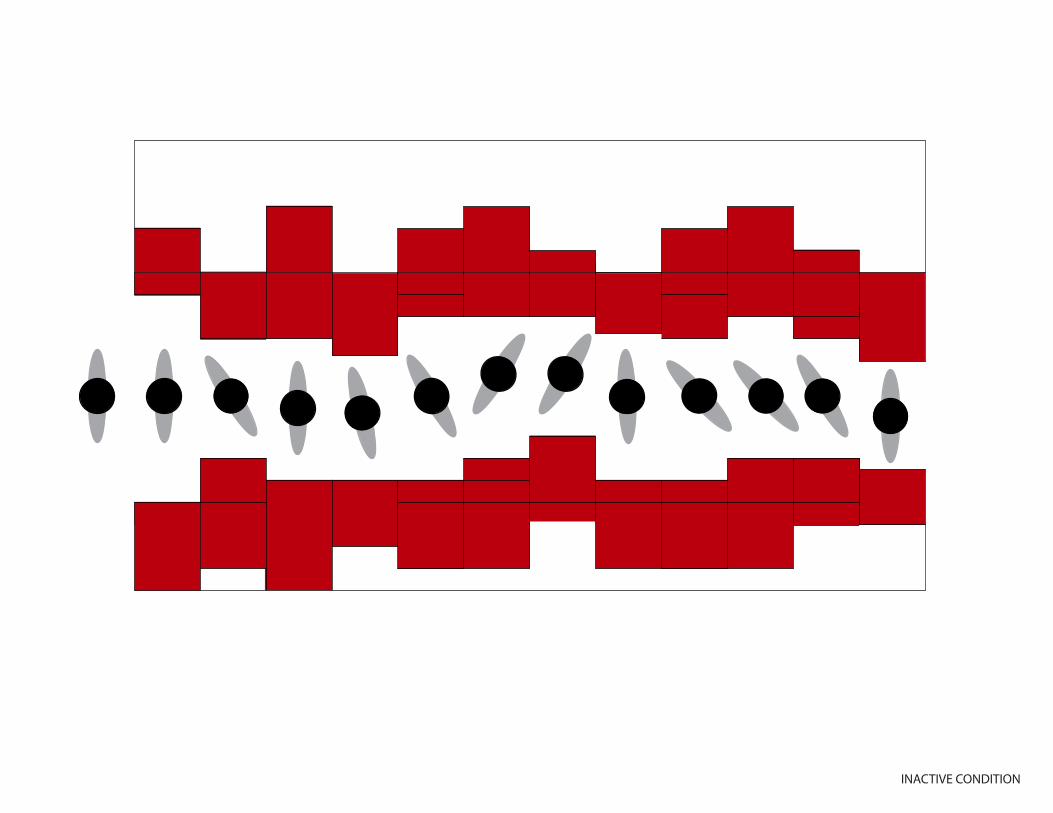
INACTIVE CONDITION
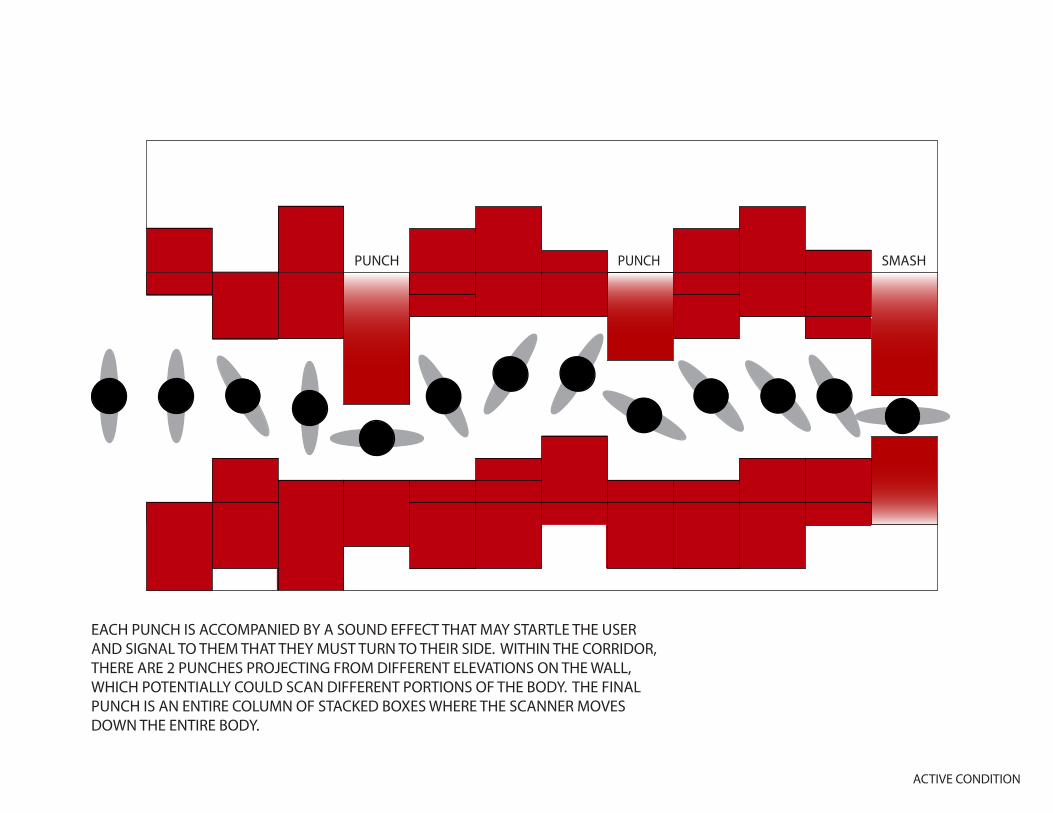
PUNCH SMASHPUNCH
ACTIVE CONDITION
EACH PUNCH IS ACCOMPANIED BY A SOUND EFFECT THAT MAY STARTLE THE USER AND SIGNAL TO THEM THAT THEY MUST TURN TO THEIR SIDE. WITHIN THE CORRIDOR, THERE ARE 2 PUNCHES PROJECTING FROM DIFFERENT ELEVATIONS ON THE WALL, WHICH POTENTIALLY COULD SCAN DIFFERENT PORTIONS OF THE BODY. THE FINAL PUNCH IS AN ENTIRE COLUMN OF STACKED BOXES WHERE THE SCANNER MOVES DOWN THE ENTIRE BODY.
DO NOT SCALE DRAWING
Assem1SHEET 1 OF 1
UNLESS OTHERWISE SPECIFIED:
SCALE: 1:2 WEIGHT:
REVDWG. NO.
ASIZE
TITLE:
NAME DATE
COMMENTS:
Q.A.
MFG APPR.
ENG APPR.
CHECKED
DRAWN
FINISH
MATERIAL
INTERPRET GEOMETRICTOLERANCING PER:
DIMENSIONS ARE IN INCHESTOLERANCES:FRACTIONALANGULAR: MACH BEND TWO PLACE DECIMAL THREE PLACE DECIMAL
APPLICATION
USED ONNEXT ASSY
PROPRIETARY AND CONFIDENTIALTHE INFORMATION CONTAINED IN THISDRAWING IS THE SOLE PROPERTY OF<INSERT COMPANY NAME HERE>. ANY REPRODUCTION IN PART OR AS A WHOLEWITHOUT THE WRITTEN PERMISSION OF<INSERT COMPANY NAME HERE> IS PROHIBITED.
5 4 3 2 1
HFD3000 LM358DLM358D
GND
IRF6
20
22micro620
10k
L293D
IRF620
AL11P
ICM7555
.01u
.01u
62k
150k
7805H
9V
.33uF.1uF
VCC 1
GND 3
IRSENSOR
OUT 2
2
31
COMPARATORA
6
57
COMPARATORB
MOSF
ET
10
C1
R3
R4
R21-2EN1
1A2
1Y3
GND14
GND25
2Y6
2A7
VCC28
VCC1 16
4A 15
4Y 14
GND3 13
GND4 12
3Y 11
3A 10
3-4EN 9
IC1
Q1
+-
SPEAKER
OUT3
V+8
GND1
DISCH 7
RESET 4
CV 5
TRIG 2
TRSH 6
IC2
C2
C3
RB
RA
VI1
3
VO 2
IC3
GNDC4C5
5V
MOTOR
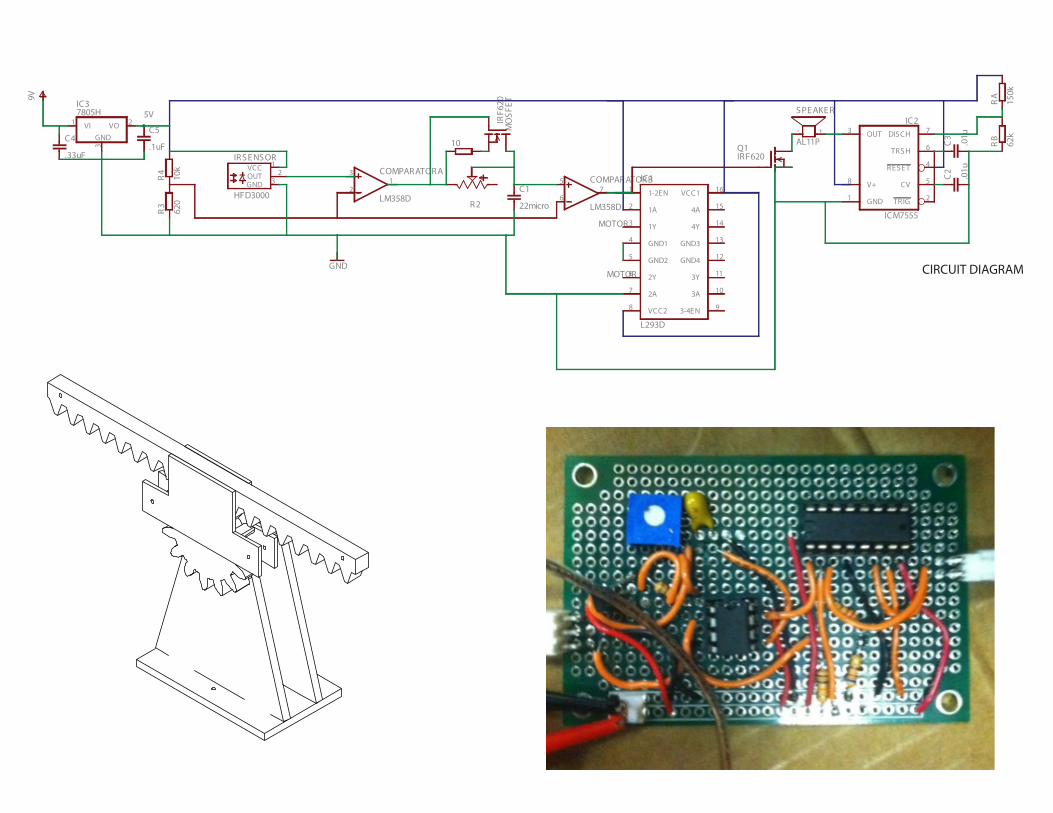
MOTOR CIRCUIT DIAGRAM