Embed Size (px)
Citation preview
1
Quad Works
Project Final Review
EG461 Capstone Design Project
May 2, 2015
Oliver Bateman
Nathaniel Burr
Juan Cataño
James Choy
Cory Clark
Tim Graham
Daniel Lopez
Joshua Ricci
Instructors:
Prof. D. Guo
Prof. L. Marquis
Prof. P. Rosner
Overview
• Problem Statement and Approach
• Objectives
• Conceive
• Design
• Implement
• Operate
• Budget
• Lessons Learned
• Future Development
3
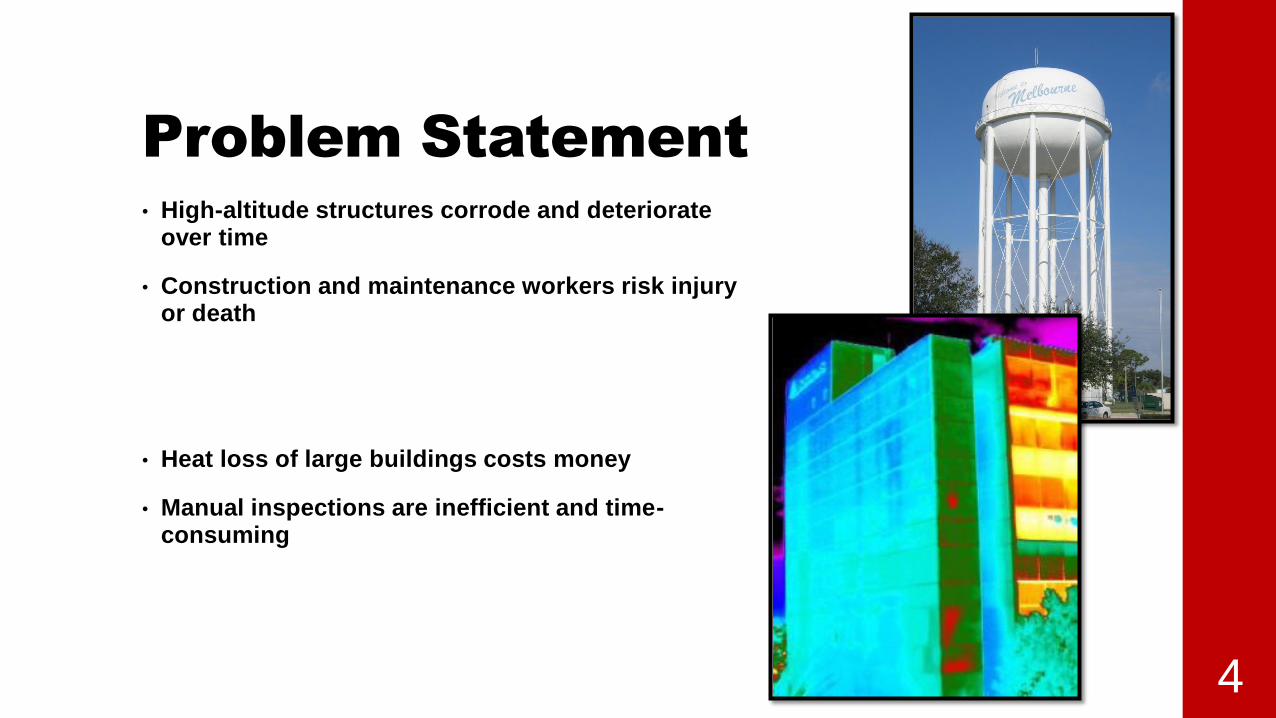
Problem Statement
• High-altitude structures corrode and deteriorate over time
• Construction and maintenance workers risk injury or death
• Heat loss of large buildings costs money
• Manual inspections are inefficient and time-consuming
4
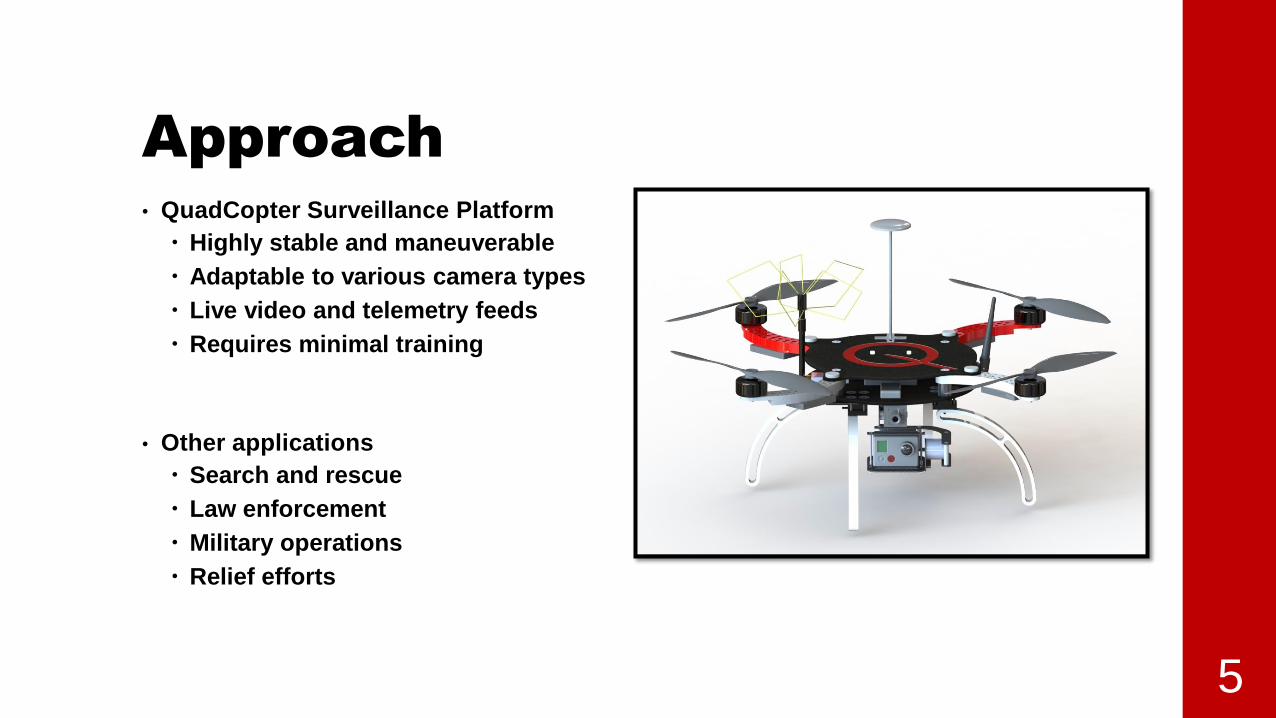
Approach
• QuadCopter Surveillance Platform
Highly stable and maneuverable
Adaptable to various camera types
Live video and telemetry feeds
Requires minimal training
• Other applications
Search and rescue
Law enforcement
Military operations
Relief efforts
5
6
Unpack quadcopter
Turn on controller
Connect battery, wait to initialize
Place in launch area
Complete pre-flight check
Power up, ascend to operating altitude
Move between observation
points
Capture images and transmit
Return to launch area
and land
Disconnect battery
Turn off controller
Collapse and pack
quadcopter
Approach
Objectives
• Design and manufacture a semi-autonomous UAV
• Modify hobbyist’s product to meet commercial applications
• Eliminate tedious tasks and hazardous situations
7
Conceive
Initial design goals
• Maximize flight time
• High-resolution camera
• Collapsible frame
• Retractable landing gear
• Capable of carrying larger cameras or sensors
8
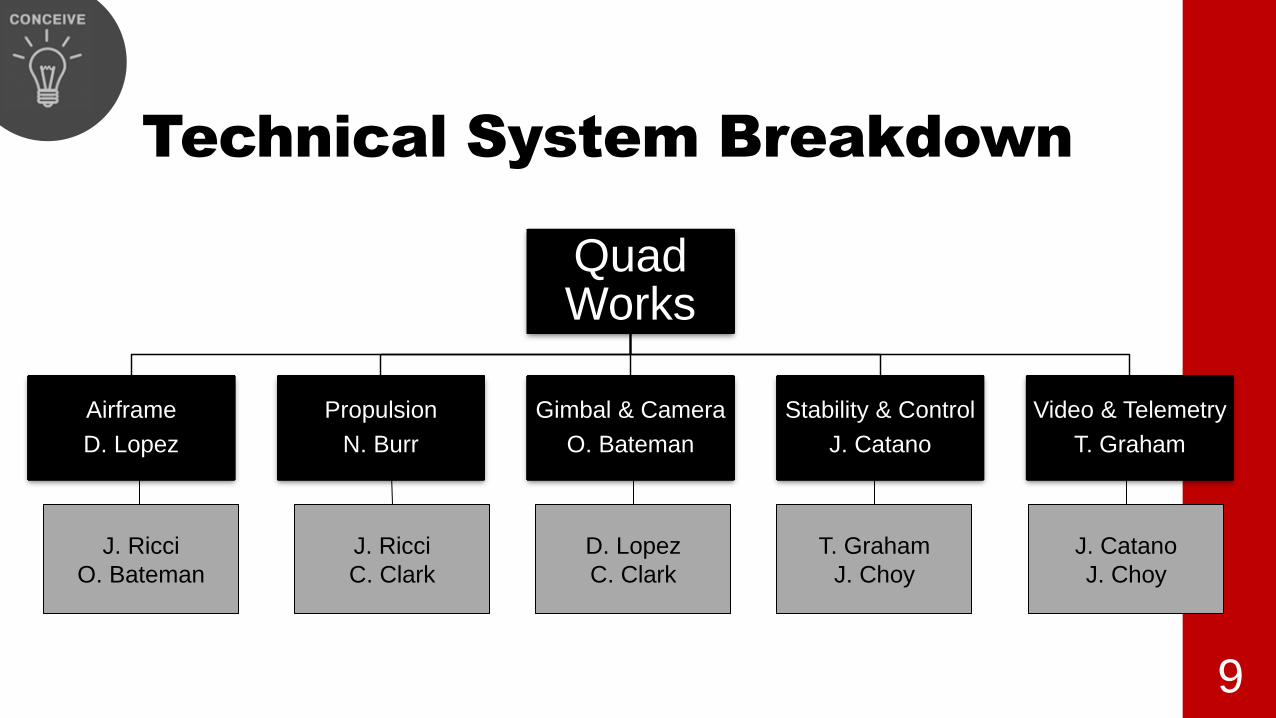
Technical System Breakdown
9
Quad Works
Airframe
D. Lopez
Propulsion
N. Burr
Gimbal & Camera
O. Bateman
Stability & Control
J. Catano
Video & Telemetry
T. Graham
J. Ricci
O. Bateman
J. Ricci
C. Clark
D. Lopez
C. Clark
T. Graham
J. Choy
J. Catano
J. Choy
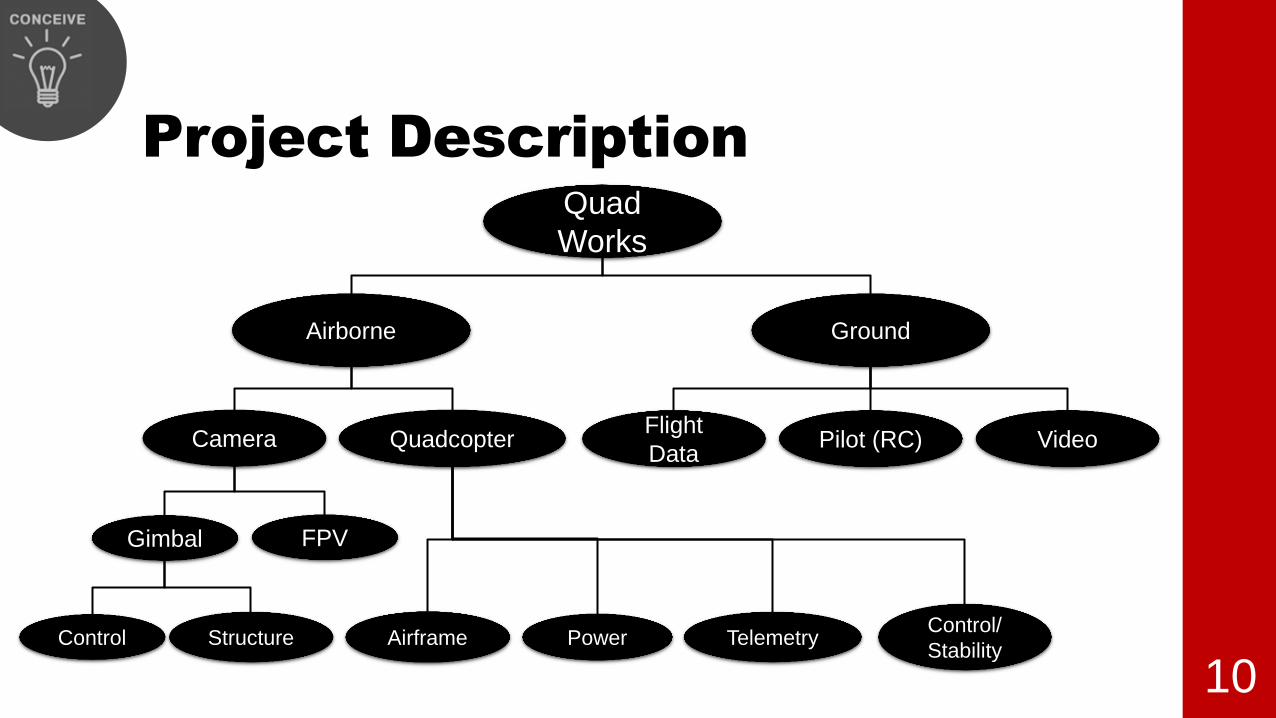
Project Description
10
Quad
Works
Ground Airborne
Flight
Data Pilot (RC) Video Quadcopter Camera
Airframe Power Telemetry Control/
Stability
FPV Gimbal
Structure Control
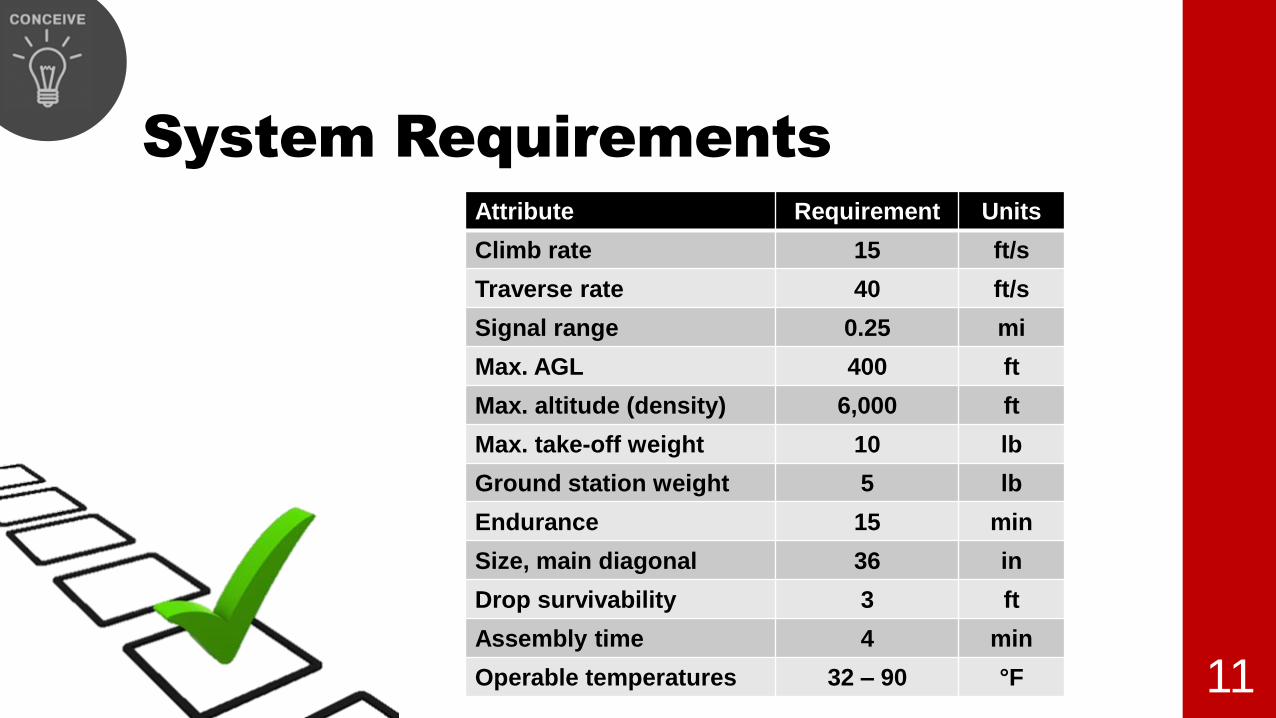
System Requirements
11
Attribute Requirement Units
Climb rate 15 ft/s
Traverse rate 40 ft/s
Signal range 0.25 mi
Max. AGL 400 ft
Max. altitude (density) 6,000 ft
Max. take-off weight 10 lb
Ground station weight 5 lb
Endurance 15 min
Size, main diagonal 36 in
Drop survivability 3 ft
Assembly time 4 min
Operable temperatures 32 – 90 °F

Design
Proposal Preliminary
(PDR) Approved
(CDR) Complete
12
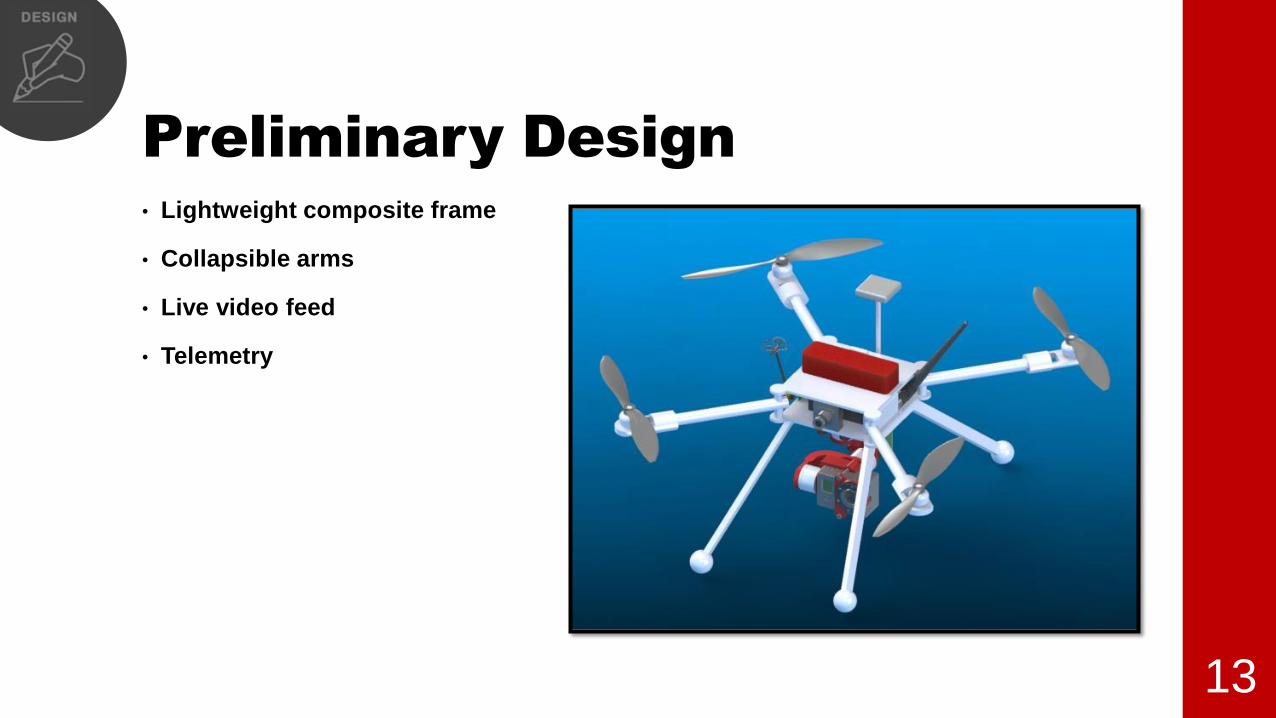
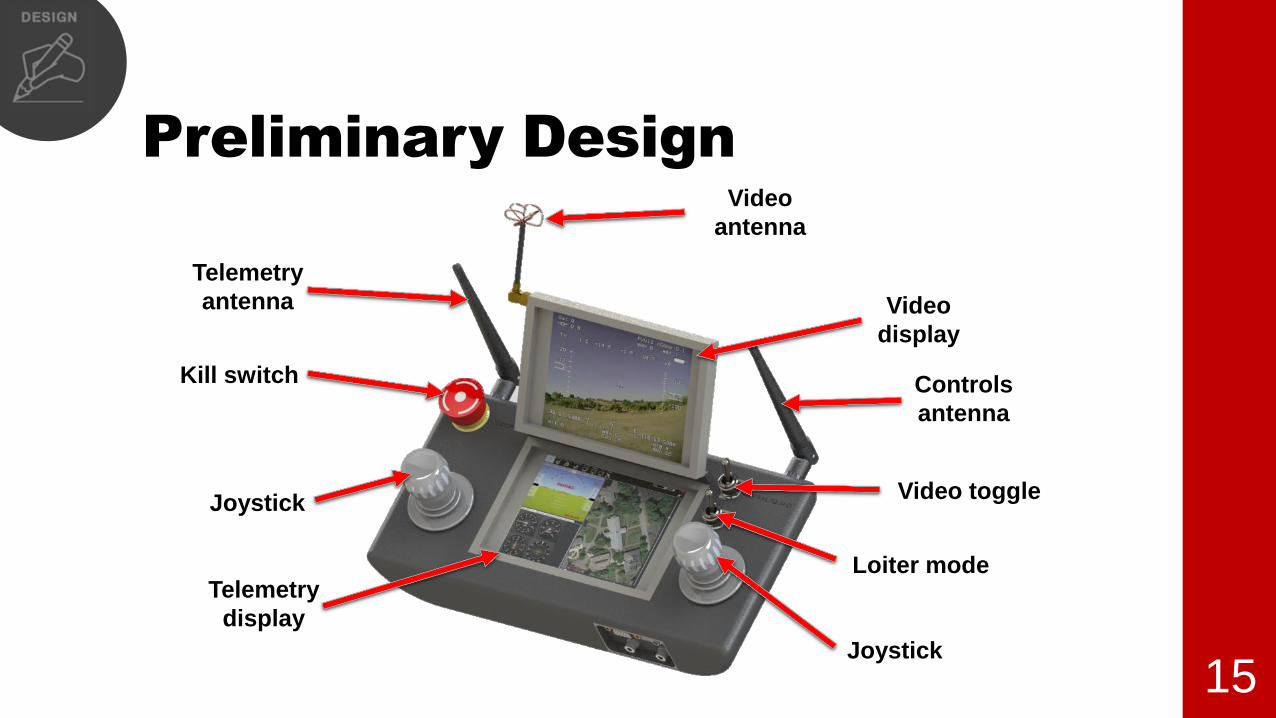
Preliminary Design
• Lightweight composite frame
• Collapsible arms
• Live video feed
• Telemetry
13

Preliminary Design
14
• 3-axis gimbal
• Controllable in pitch and yaw
• Vibration dampers
Preliminary Design
15
Telemetry
antenna
Video
antenna
Controls
antenna
Video
display
Joystick
Joystick
Kill switch
Telemetry
display
Video toggle
Loiter mode
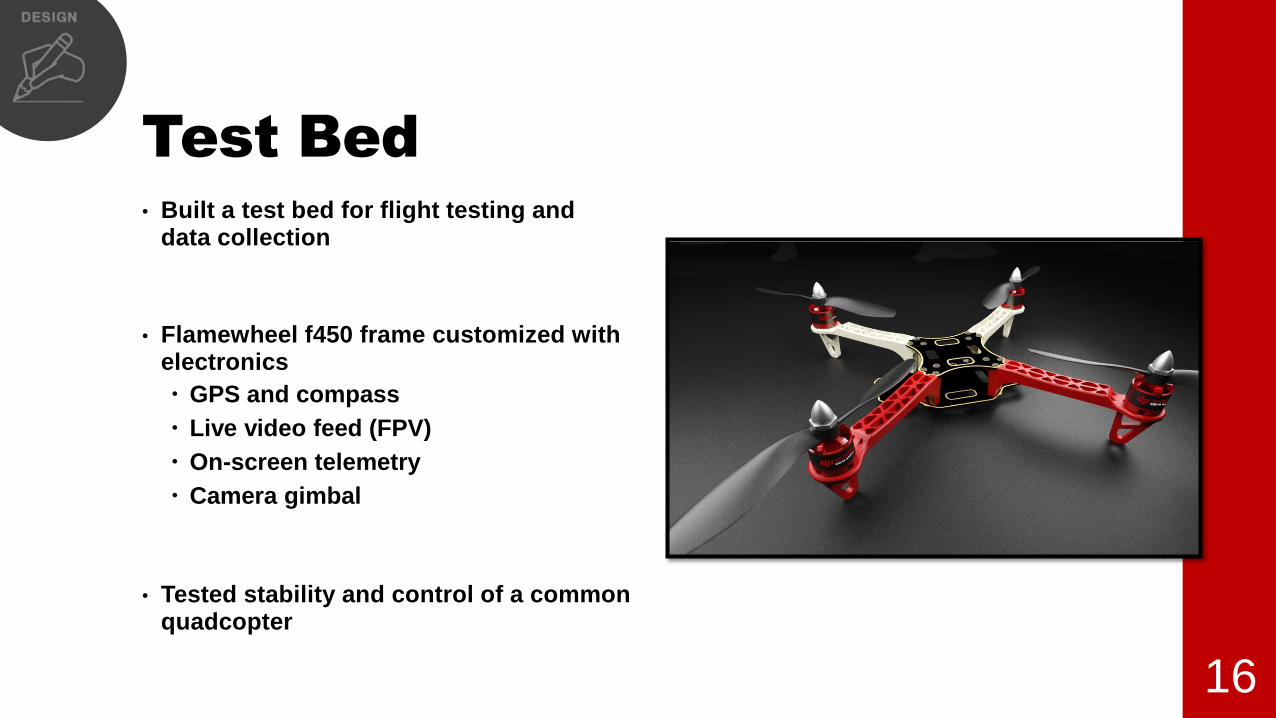
Test Bed
• Built a test bed for flight testing and data collection
• Flamewheel f450 frame customized with electronics
GPS and compass
Live video feed (FPV)
On-screen telemetry
Camera gimbal
• Tested stability and control of a common quadcopter
16
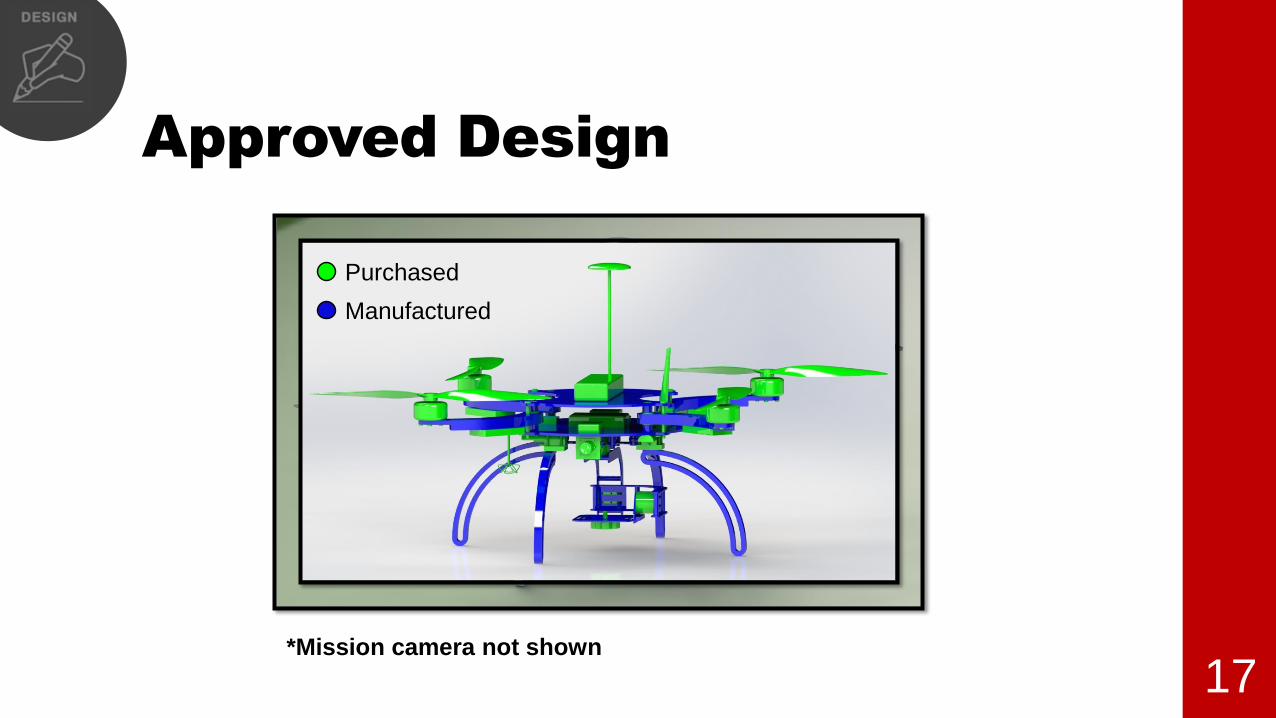
Approved Design
17
Purchased
Manufactured
*Mission camera not shown
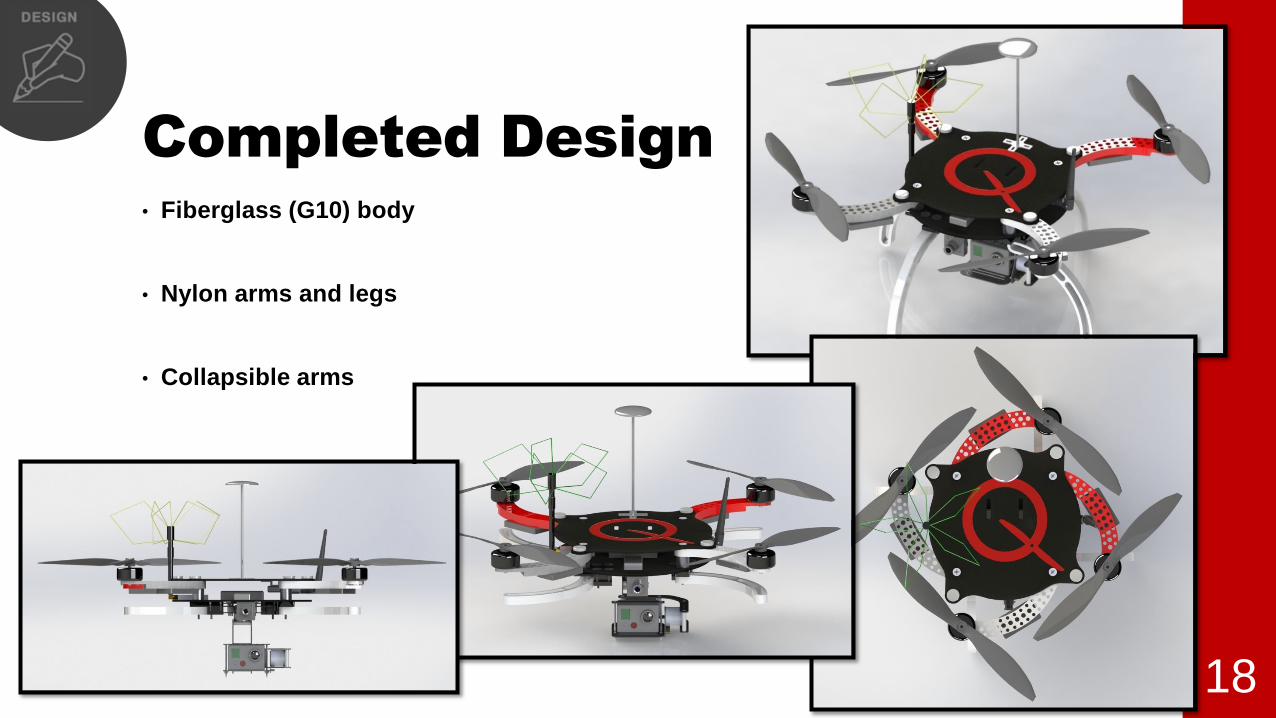
Completed Design
18
• Fiberglass (G10) body
• Nylon arms and legs
• Collapsible arms

Completed Design
19
• Carbon fiber
• Quick-release interface
• Camera holster
• Adjustable CG
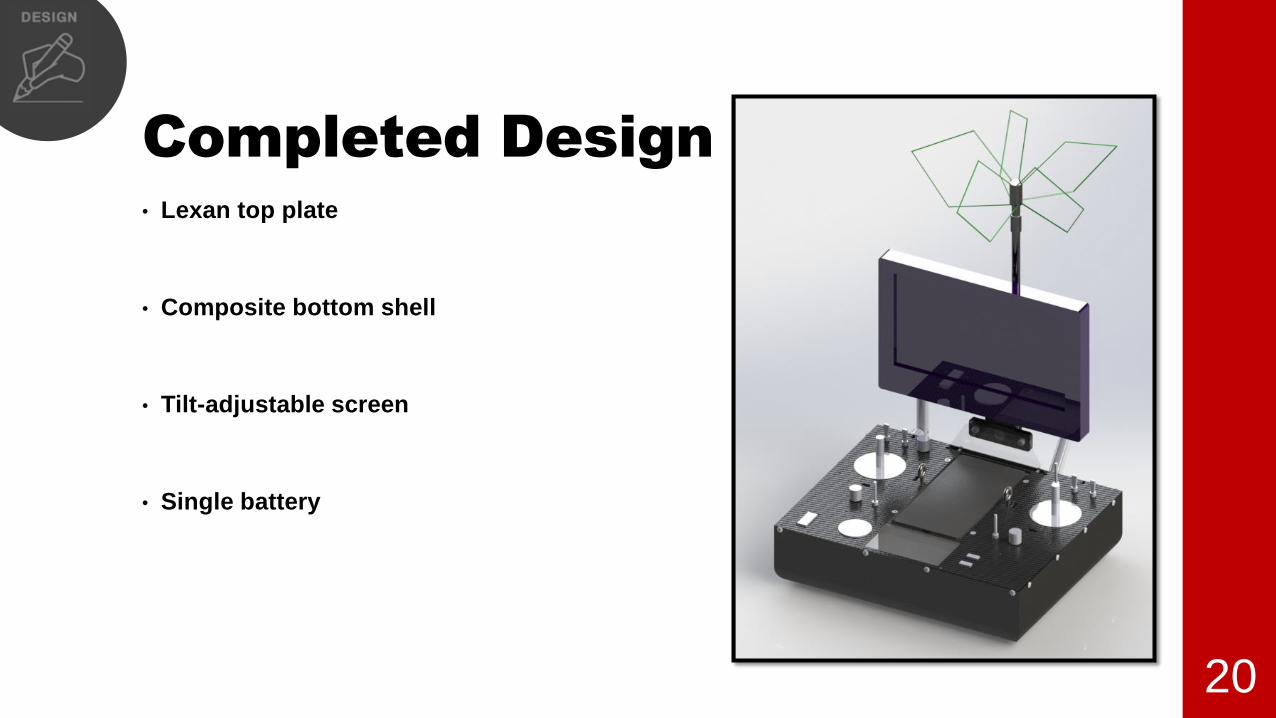
Completed Design
20
• Lexan top plate
• Composite bottom shell
• Tilt-adjustable screen
• Single battery
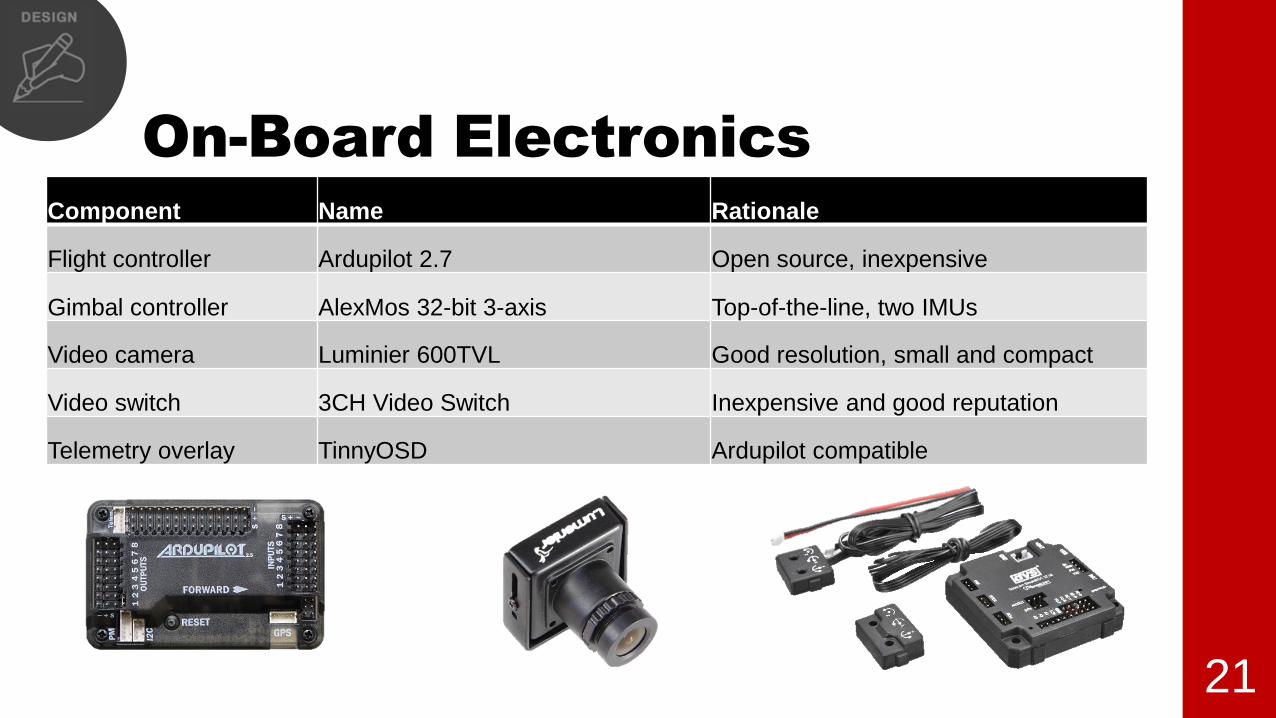
On-Board Electronics
21
Component Name Rationale
Flight controller Ardupilot 2.7 Open source, inexpensive
Gimbal controller AlexMos 32-bit 3-axis Top-of-the-line, two IMUs
Video camera Luminier 600TVL Good resolution, small and compact
Video switch 3CH Video Switch Inexpensive and good reputation
Telemetry overlay TinnyOSD Ardupilot compatible
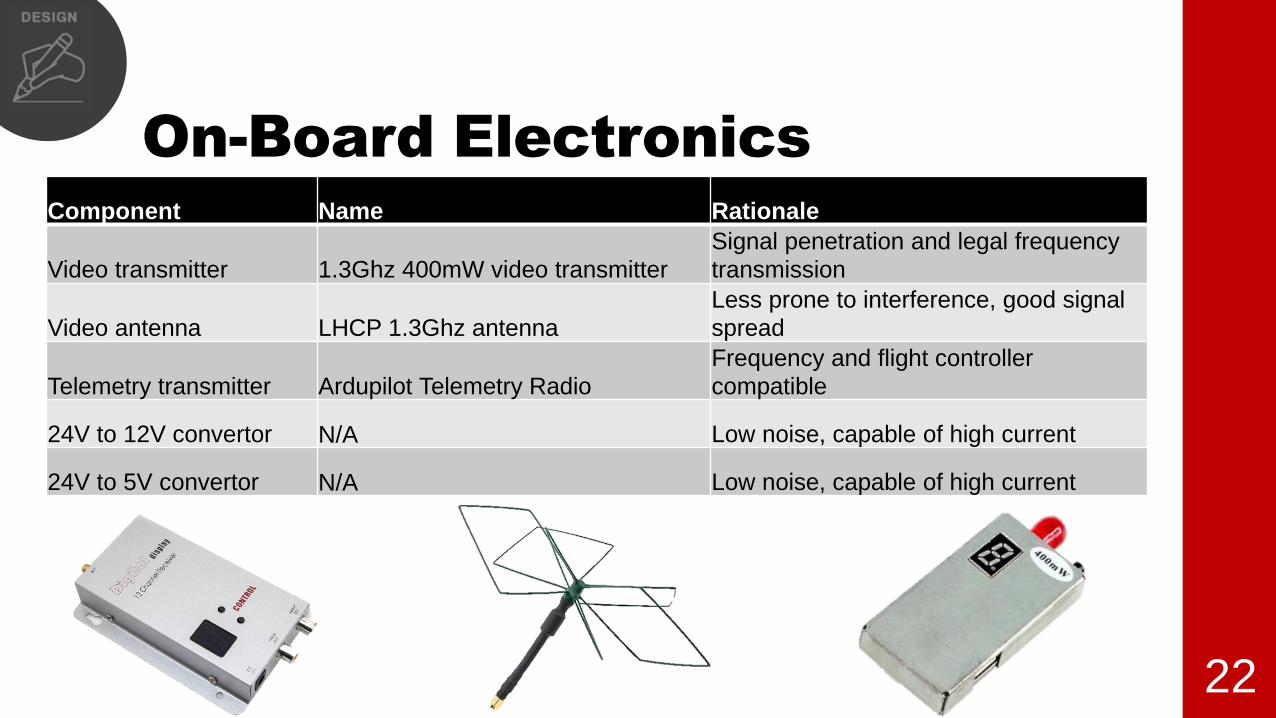
On-Board Electronics
22
Component Name Rationale
Video transmitter 1.3Ghz 400mW video transmitter Signal penetration and legal frequency
transmission
Video antenna LHCP 1.3Ghz antenna Less prone to interference, good signal
spread
Telemetry transmitter Ardupilot Telemetry Radio Frequency and flight controller
compatible
24V to 12V convertor N/A Low noise, capable of high current
24V to 5V convertor N/A Low noise, capable of high current
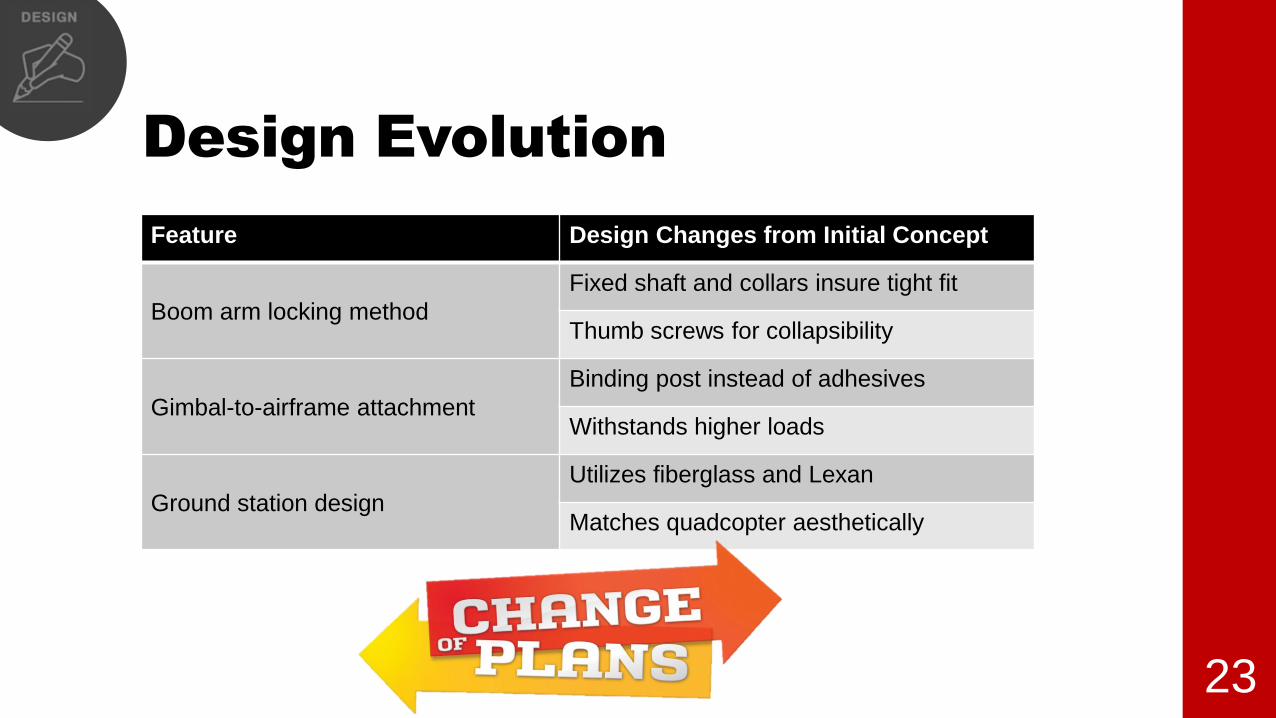
Design Evolution
23
Feature Design Changes from Initial Concept
Boom arm locking method
Fixed shaft and collars insure tight fit
Thumb screws for collapsibility
Gimbal-to-airframe attachment
Binding post instead of adhesives
Withstands higher loads
Ground station design
Utilizes fiberglass and Lexan
Matches quadcopter aesthetically
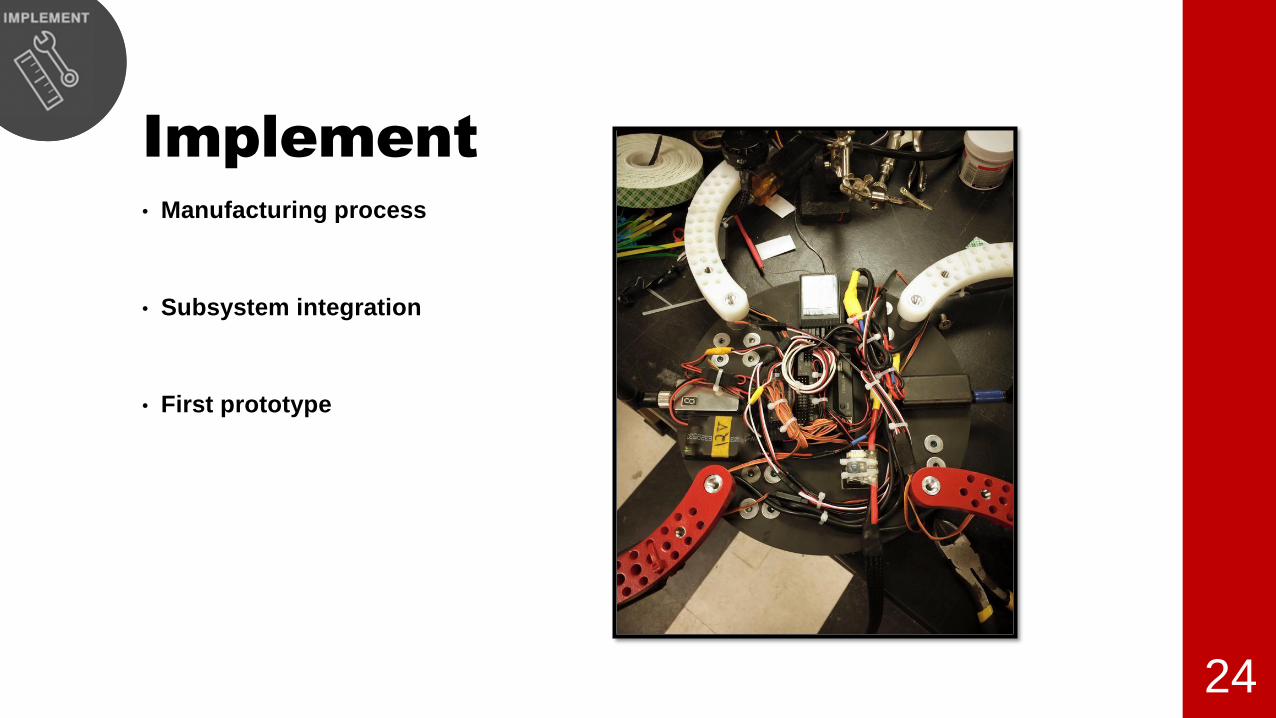
Implement
• Manufacturing process
• Subsystem integration
• First prototype
24
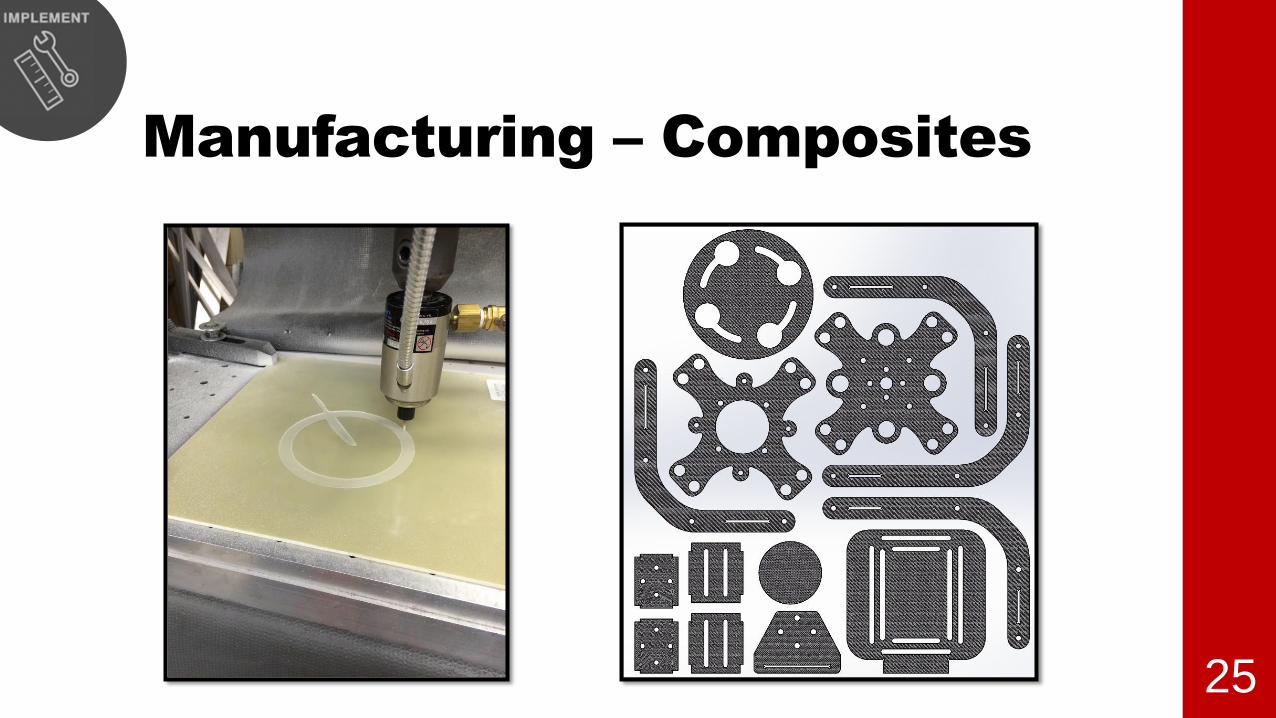
Manufacturing – Composites
25
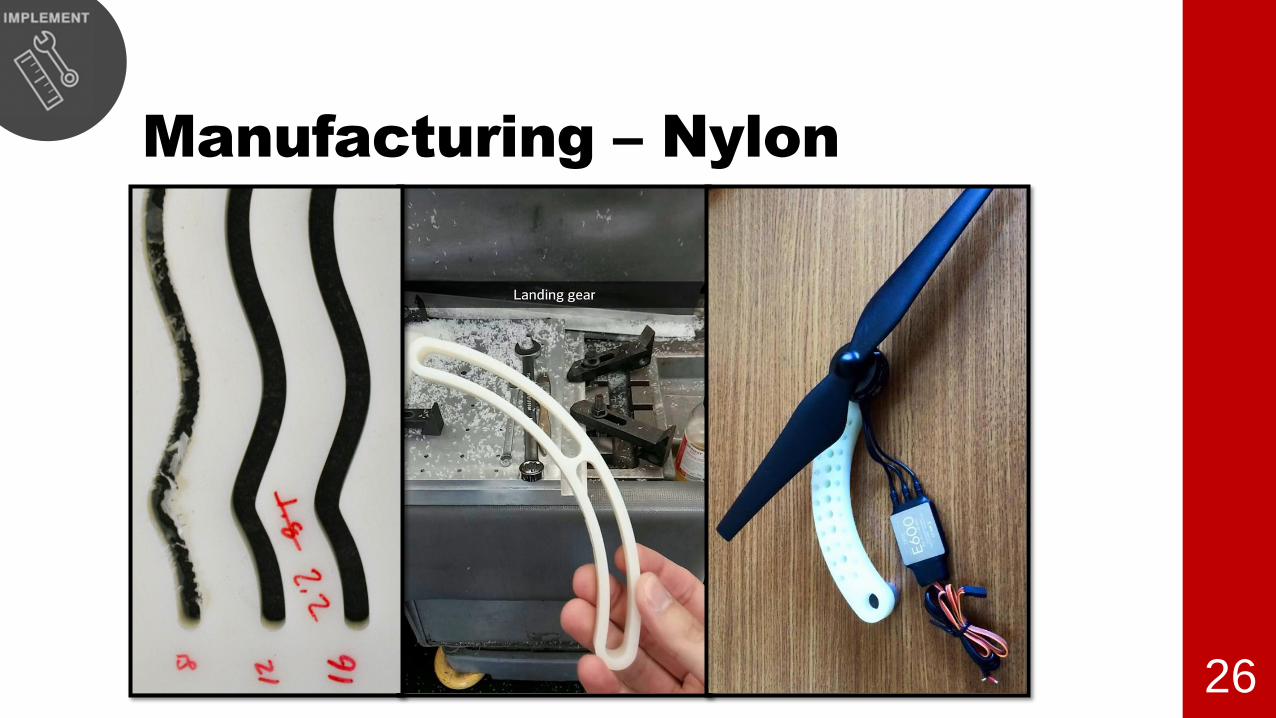
Manufacturing – Nylon
26
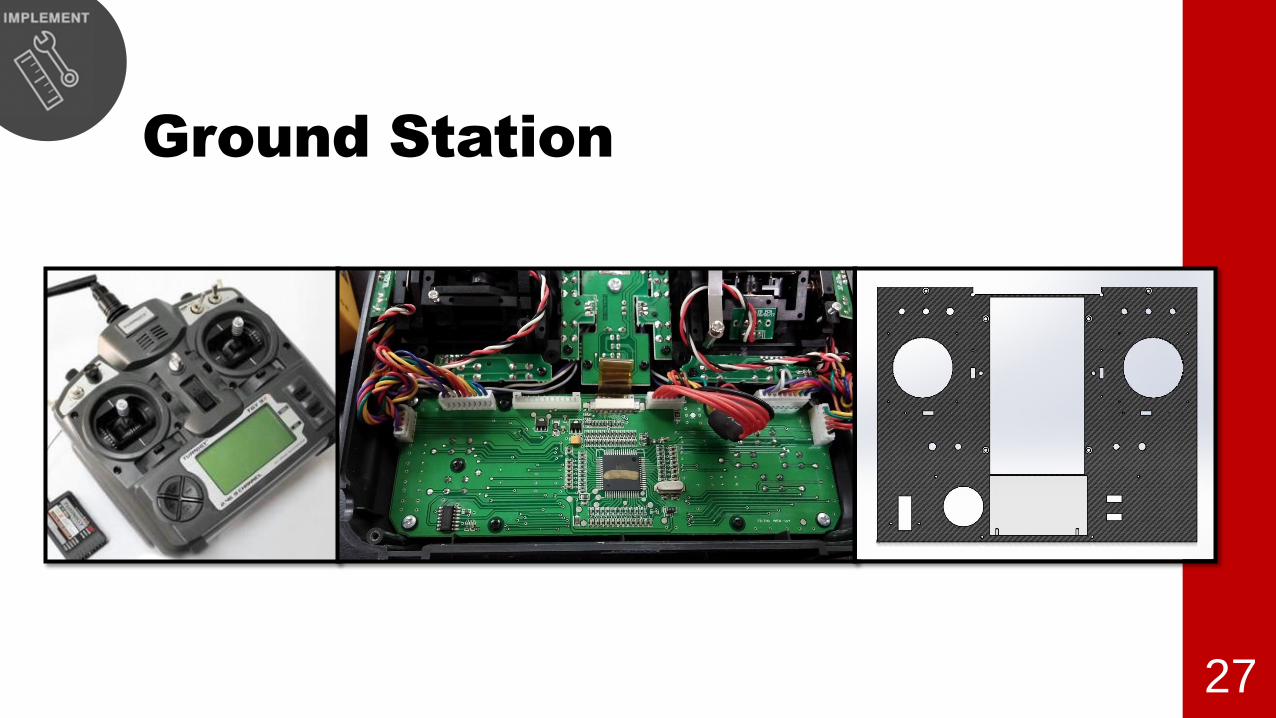
Ground Station
27
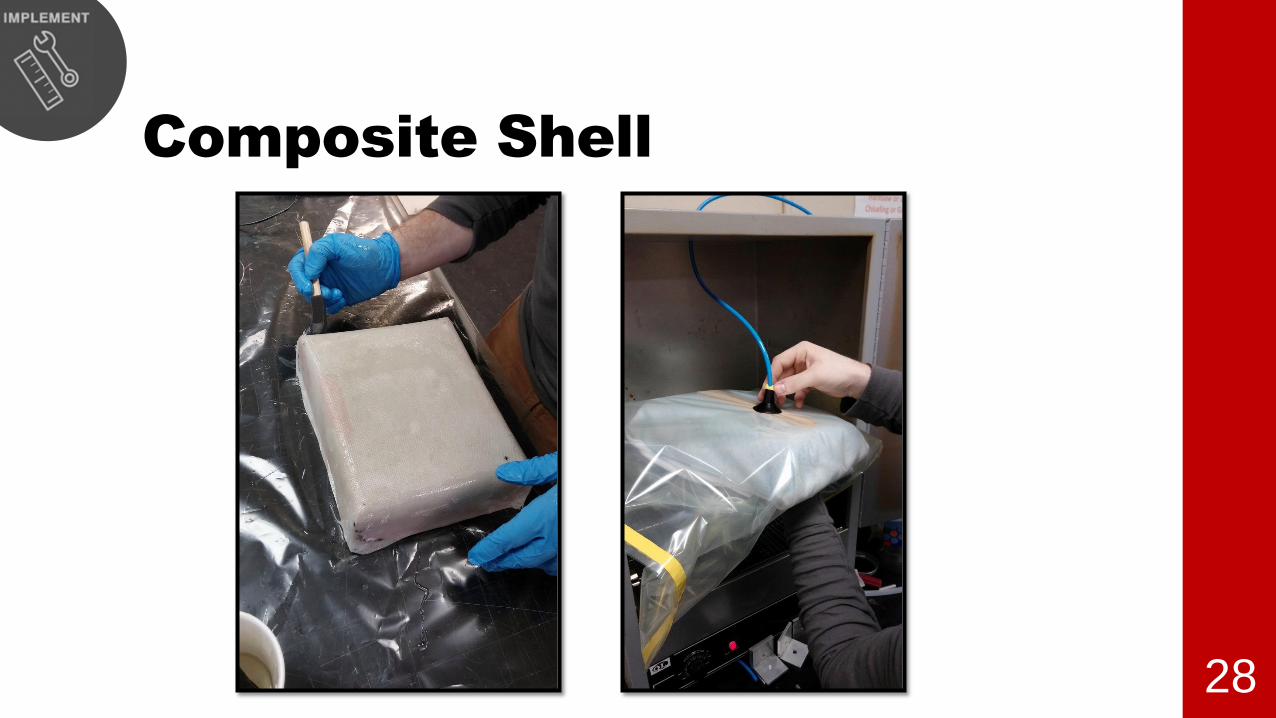
Composite Shell
28
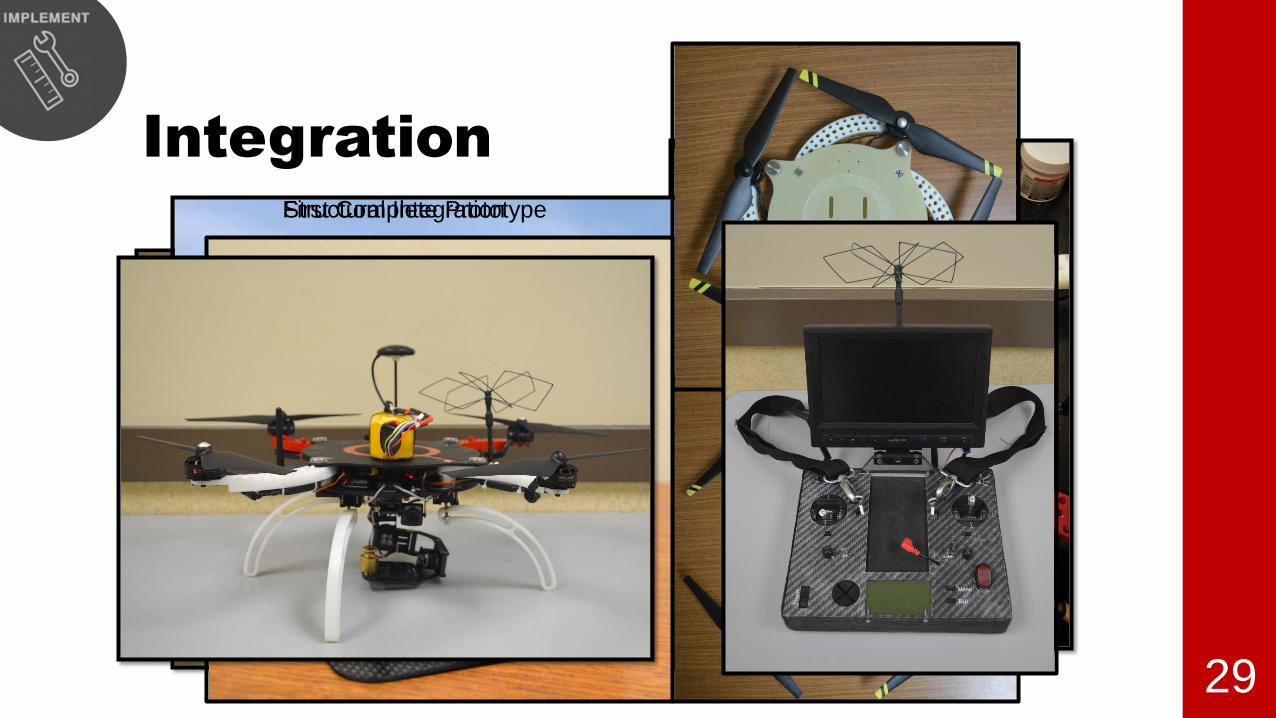
Electronics Integration
Integration
29
Structural Integration First Complete Prototype
Operate
• Testing and results
• Failure analysis
• Verification
30
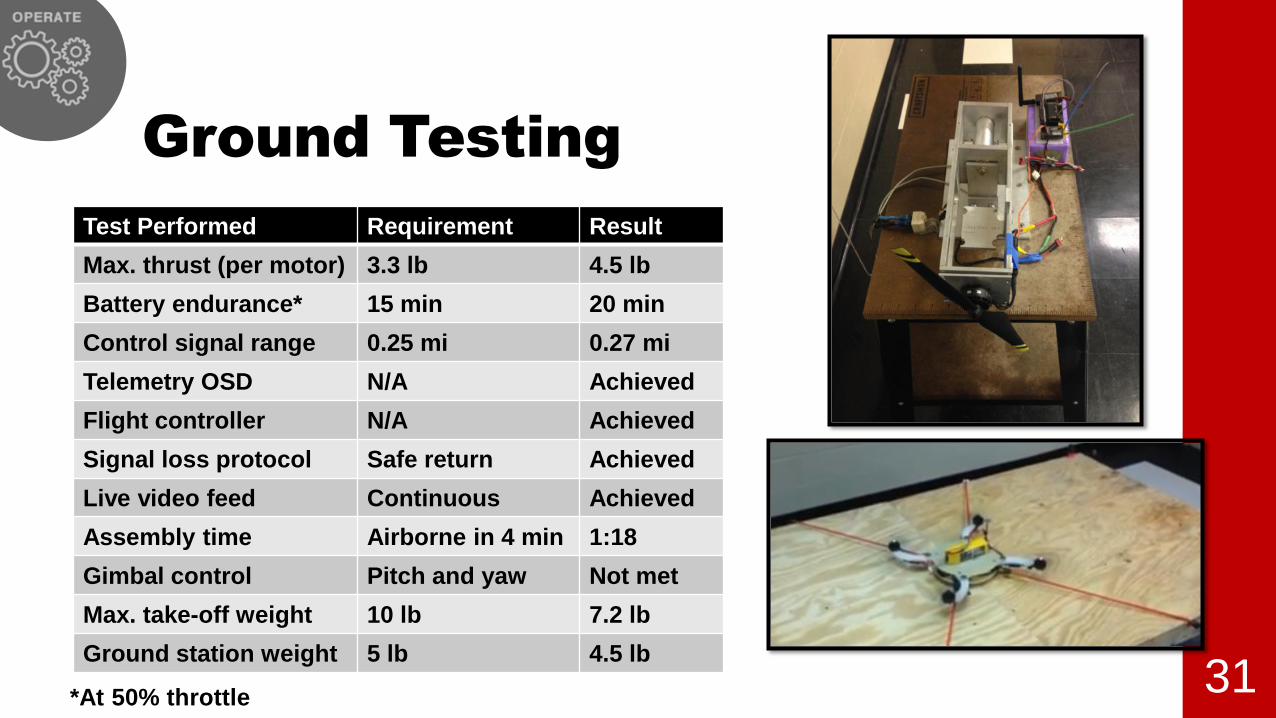
Ground Testing
*At 50% throttle 31
Test Performed Requirement Result
Max. thrust (per motor) 3.3 lb 4.5 lb
Battery endurance* 15 min 20 min
Control signal range 0.25 mi 0.27 mi
Telemetry OSD N/A Achieved
Flight controller N/A Achieved
Signal loss protocol Safe return Achieved
Live video feed Continuous Achieved
Assembly time Airborne in 4 min 1:18
Gimbal control Pitch and yaw Not met
Max. take-off weight 10 lb 7.2 lb
Ground station weight 5 lb 4.5 lb

Assembly Time
32
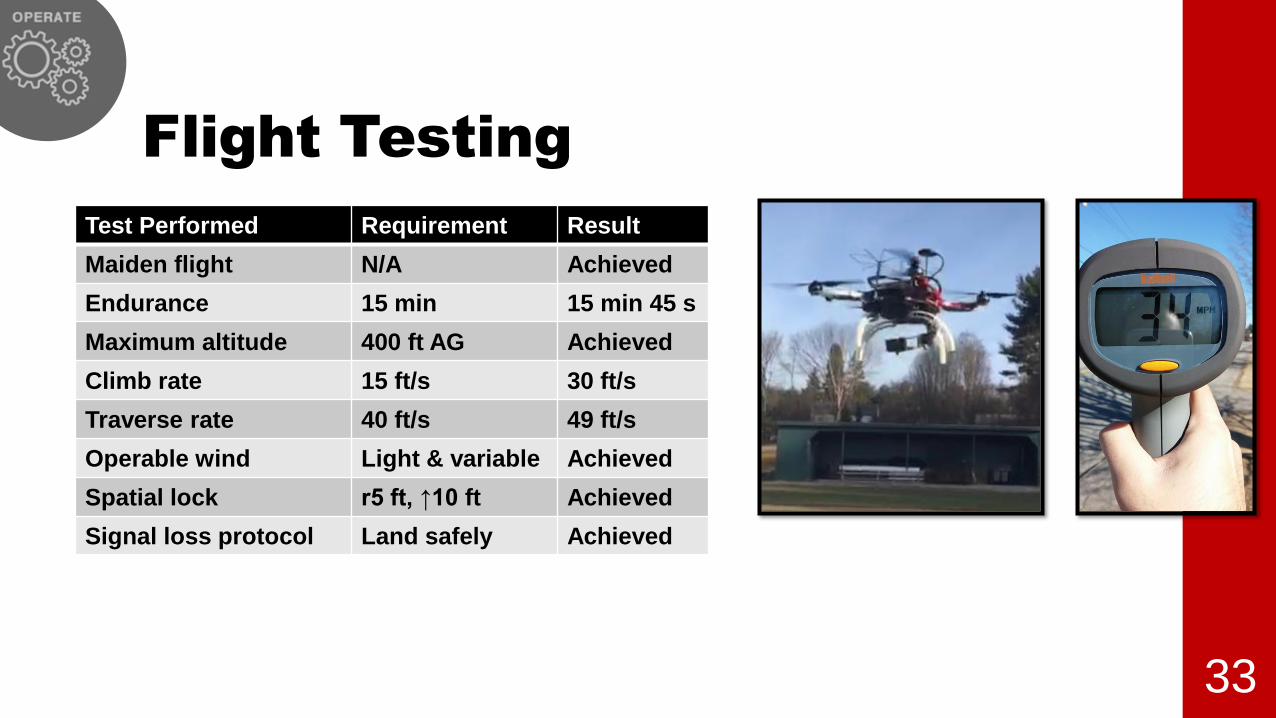
Flight Testing
33
Test Performed Requirement Result
Maiden flight N/A Achieved
Endurance 15 min 15 min 45 s
Maximum altitude 400 ft AG Achieved
Climb rate 15 ft/s 30 ft/s
Traverse rate 40 ft/s 49 ft/s
Operable wind Light & variable Achieved
Spatial lock r5 ft, ↑10 ft Achieved
Signal loss protocol Land safely Achieved
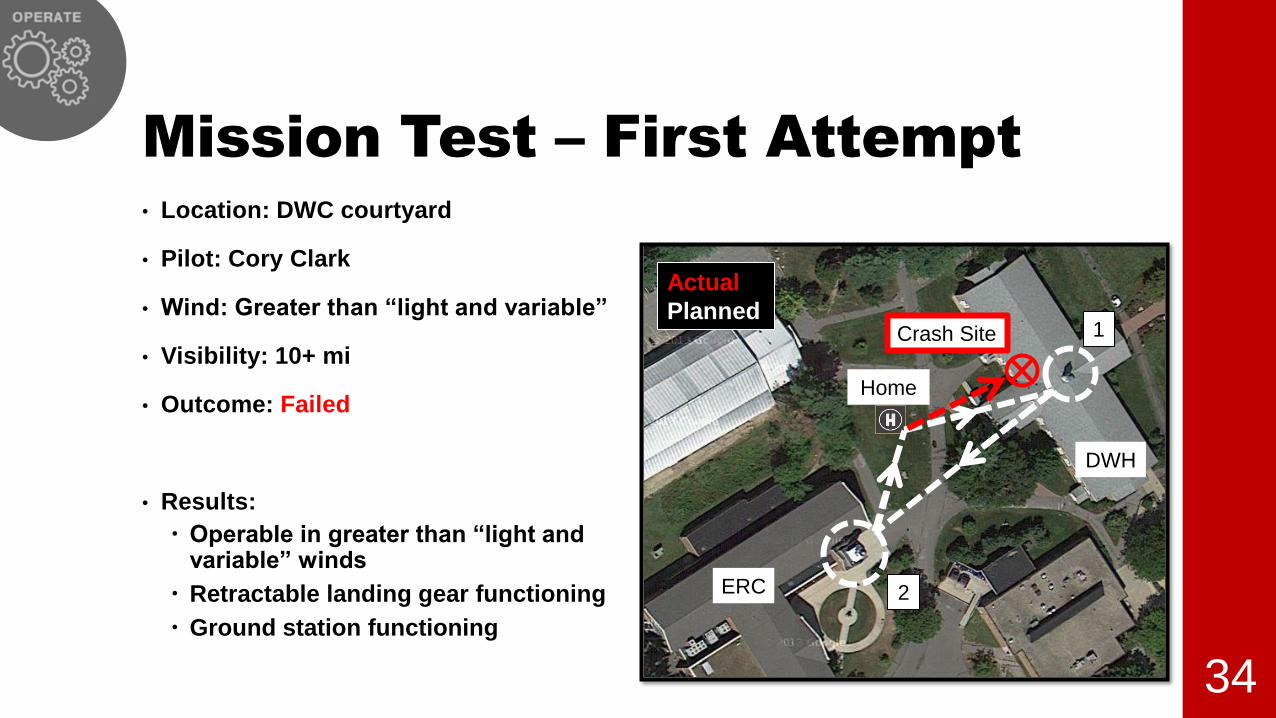
Mission Test – First Attempt
• Location: DWC courtyard
• Pilot: Cory Clark
• Wind: Greater than “light and variable”
• Visibility: 10+ mi
• Outcome: Failed
• Results:
Operable in greater than “light and variable” winds
Retractable landing gear functioning
Ground station functioning
34
DWH
ERC 2
1
Home
Crash Site
Actual
Planned

Crash Footage
35
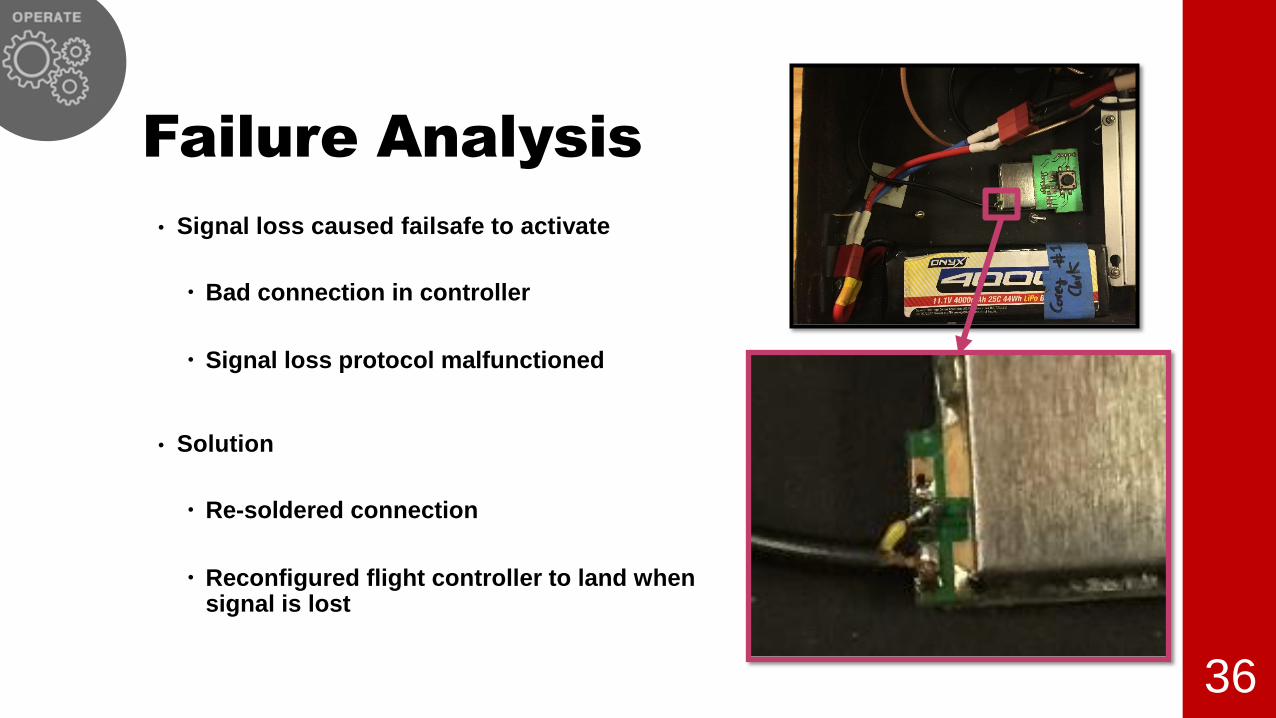
Failure Analysis
36
• Signal loss caused failsafe to activate
Bad connection in controller
Signal loss protocol malfunctioned
• Solution
Re-soldered connection
Reconfigured flight controller to land when signal is lost

Design Changes
• Fixed Landing Gear
• Thickened gimbal arms
37
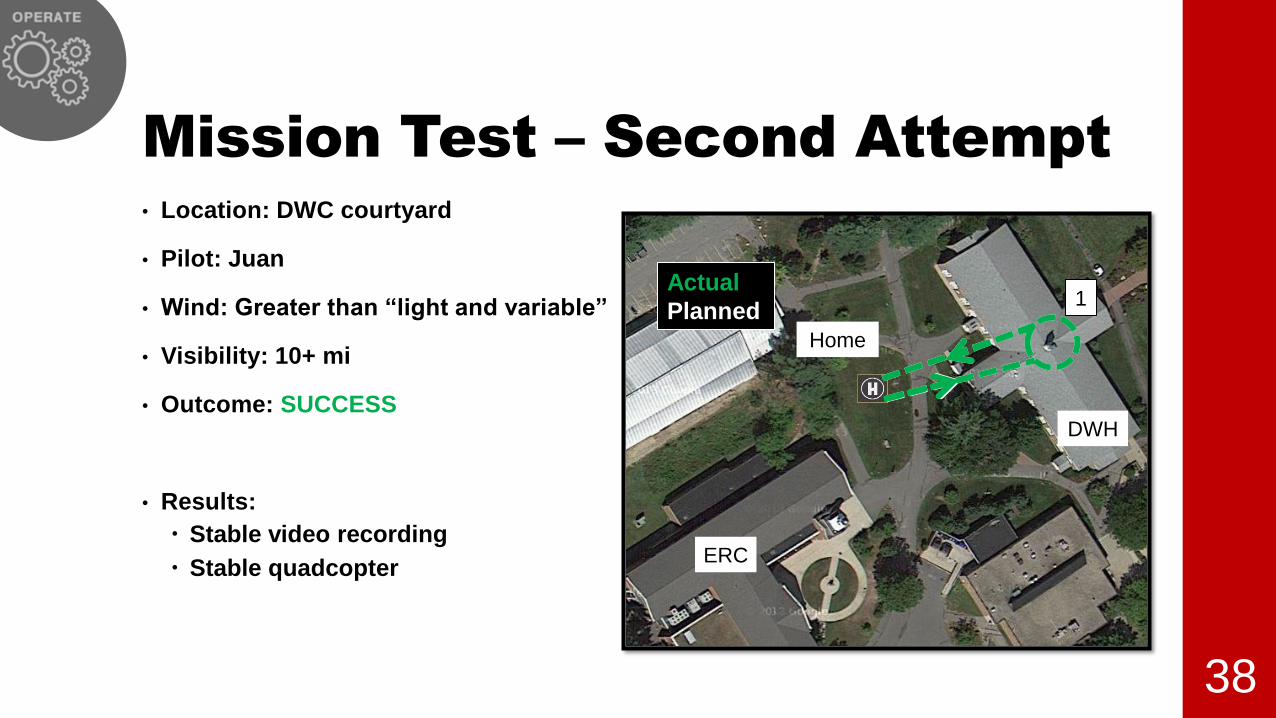
Mission Test – Second Attempt
• Location: DWC courtyard
• Pilot: Juan
• Wind: Greater than “light and variable”
• Visibility: 10+ mi
• Outcome: SUCCESS
• Results:
Stable video recording
Stable quadcopter
38
DWH
ERC
1
Home
Actual
Planned
Mission Test – Second Attempt
39
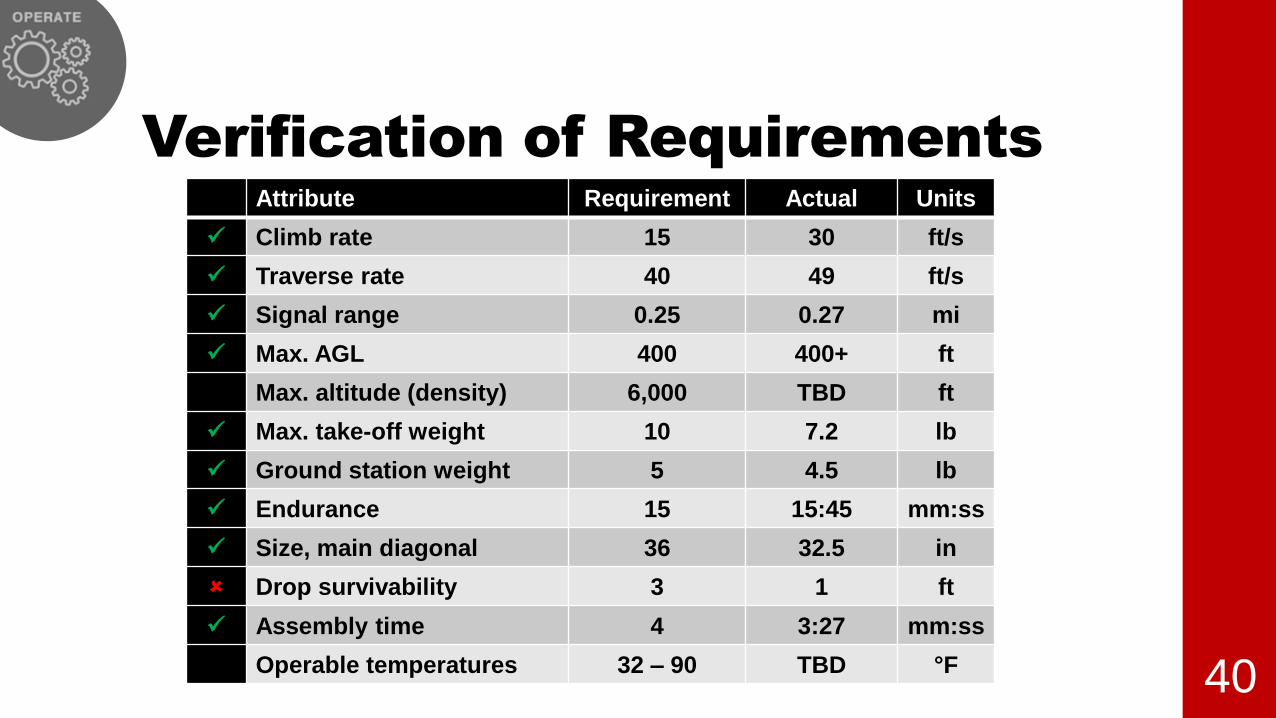
Verification of Requirements
40
Attribute Requirement Actual Units
Climb rate 15 30 ft/s
Traverse rate 40 49 ft/s
Signal range 0.25 0.27 mi
Max. AGL 400 400+ ft
Max. altitude (density) 6,000 TBD ft
Max. take-off weight 10 7.2 lb
Ground station weight 5 4.5 lb
Endurance 15 15:45 mm:ss
Size, main diagonal 36 32.5 in
Drop survivability 3 1 ft
Assembly time 4 3:27 mm:ss
Operable temperatures 32 – 90 TBD °F
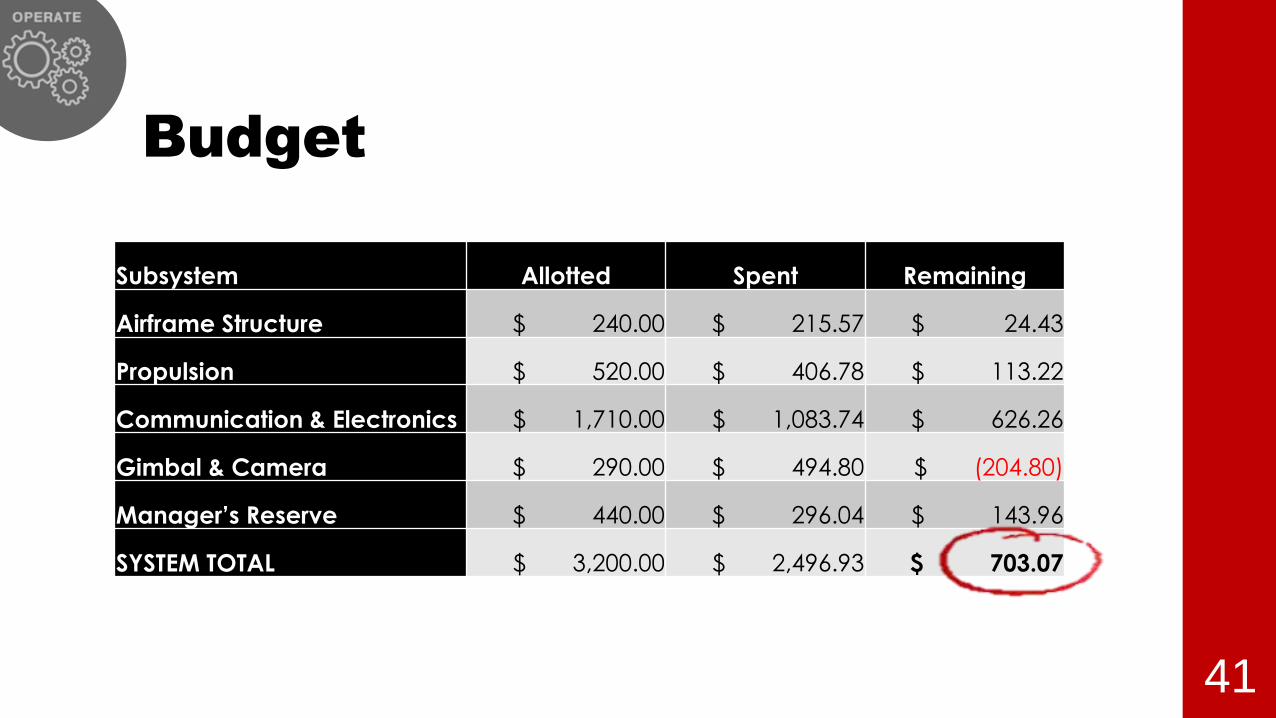
Budget
41
Subsystem Allotted Spent Remaining
Airframe Structure $ 240.00 $ 215.57 $ 24.43
Propulsion $ 520.00 $ 406.78 $ 113.22
Communication & Electronics $ 1,710.00 $ 1,083.74 $ 626.26
Gimbal & Camera $ 290.00 $ 494.80 $ (204.80)
Manager’s Reserve $ 440.00 $ 296.04 $ 143.96
SYSTEM TOTAL $ 3,200.00 $ 2,496.93 $ 703.07
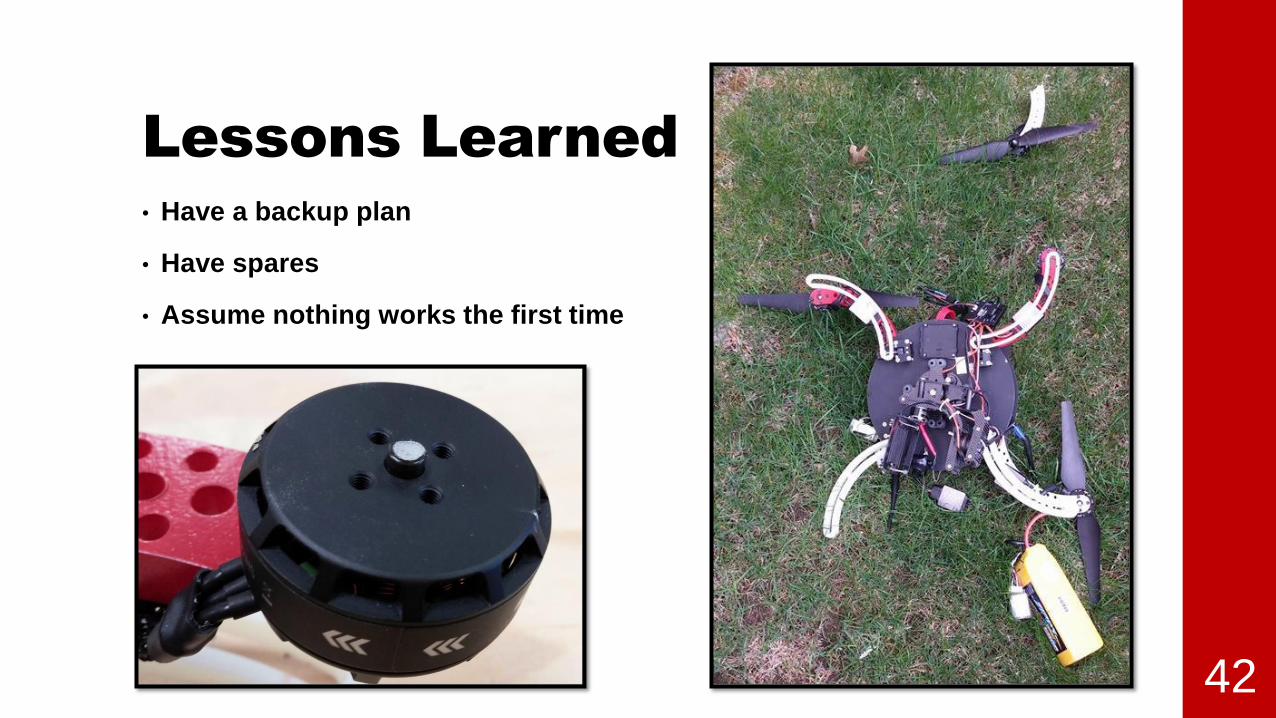
Lessons Learned
• Have a backup plan
• Have spares
• Assume nothing works the first time
42

Future Development
• Improve the gimbal stability
• Change video frequency
• Improve video signal quality
• Reduce EMI
• Reinforce the landing gear
43
Summary
• Problem Statement and Approach
• Objectives
• Conceive
• Design
• Implement
• Operate
• Budget
• Lessons Learned
• Future Development
44
Thank You
Dean Bertozzi
Professor Rosner
Professor Guo
Professor Carlstrom
SAE First Gen Supermile
Professor Kostar
Professor Sadreay
Professor Marquis
RC Buyers Warehouse
DWC Facilities
45





























