Embed Size (px)
Citation preview

QUADCOPTER Group 1
• Floris Driessen • Martin van Leussen • Art Senders • Tijl van Vliet • Steven van der Vlugt
Huginn

Presentation outlines • Assignments and goals
• A) Build the quadcopter and get it flying
• B) PID tuning
• C) Rotate 360 degrees around the z-axis
• D) Marker detection
• E) Environment map
• Results
• Recommendations

A) Hardware setup
Base Station
Quad Copter 4x motor
PC Manual
GUI 9Ch
Transmitter
MultiWii Pro IMU RF Bluetooth
ESC
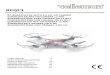
A) Multiwii
• Active community • Open source • Good quality • Powerful controller
Accelerometer
Gyroscoop Magnetometer
Atmega2560

B) Stable Quadcopter • Flash ESC with custom firmware
• PID tuning
• Ziegler Nichols
• Impulse response
• Step response

B) Stable Quadcopter
-20
-10
0
10
20
30
40
50
60
70
1 4 7 10 13 16 19 22 25 28 31 34 37 40 43 46 49 52 55 58 61 64 67 70 73 76 79 82 85 88 91 94 97 100
103
106
109
112
115
118
121
124
127
130
133
136
Pitc
h in
tent
h of
deg
rees
Time

B) Stable Quadcopter
-90
-70
-50
-30
-10
10
30
50
70
90
110
1 6 11 16 21 26 31 36 41 46 51 56 61 66 71 76 81 86 91 96 101
106
111
116
121
126
131
136
141
146
151
156
161
166
171
176
181
186
191
196
201
206
211
216
221
226
231
236
241
246
251
256
Pitc
h in
tent
h of
deg
ree
Time
Pitch
C) Rotate 360 degrees around the z-axis • Panorama • Location hold
• Fixed height • Fixed location

C) Hardware setup
Base Station
Quad Copter
Beagle Board
4x motor
Bottom Cam Kinect
PC Manual
Console
Point-cloud
Top Sonar
Bottom Sonar
9Ch Transmitter
MultiWii Pro IMU RF
WiFi
Sonar Controller ESC

C) Height control • Fix altitude
• Ultrasonic sensor
• Pitch correction
Measured Height
Height Correction

C) Height measurement
-400
-300
-200
-100
0
100
200
300
400
60
65
70
75
80
85
90
95
100
1 4 7 10 13 16 19 22 25 28 31 34 37 40 43 46 49 52 55 58 61 64 67 70 73 76 79
Angl
e in
tent
hs o
f deg
rees
Hei
ght (
cm)
Time
Measured altitude
Corrected altitude
pitch

C) Control • Start quad copter with RF transmitter • Enable altitude hold • Switch roll, pitch and yaw control to BeagleBoard
Pitch Roll Throttle
Yaw

C) Global control (HW)

C) Global control (SW) • Ubuntu
• Cross platform • Experience and know how
• OpenCV • Powerful open source computer vision library by Intel • General purpose vision functions • Functions to work with video streams
• Open Kinect • Light weight open source library
C) Fixed location • Optical flow
• Stabilization based on detected features
• Marker • Stabilization based on marker orientation

C) Optical Flow

C) Optical Flow 50 strongest features
outlier 350 strongest features

C) Fixed location • Optical flow
• Requires trajectory planning to navigate the quadcopter
• Marker • Marker can be followed throughout a building

D) Marker detection • Follow line instead need for trajectory planning • Take a corner in a line
• Line detection
• Houghline: vector extraction from edges • Classification: combine vectors to lines
• Marker identification

D) Image processing 1. Color image 2. Blur (to remove noise from
processing) 3. Black and white image
(not conventional) 4. Canny edge detection 5. Houghlines transform
(vector output) 6. Vectors to lines (classification) 7. Detect crossing + type
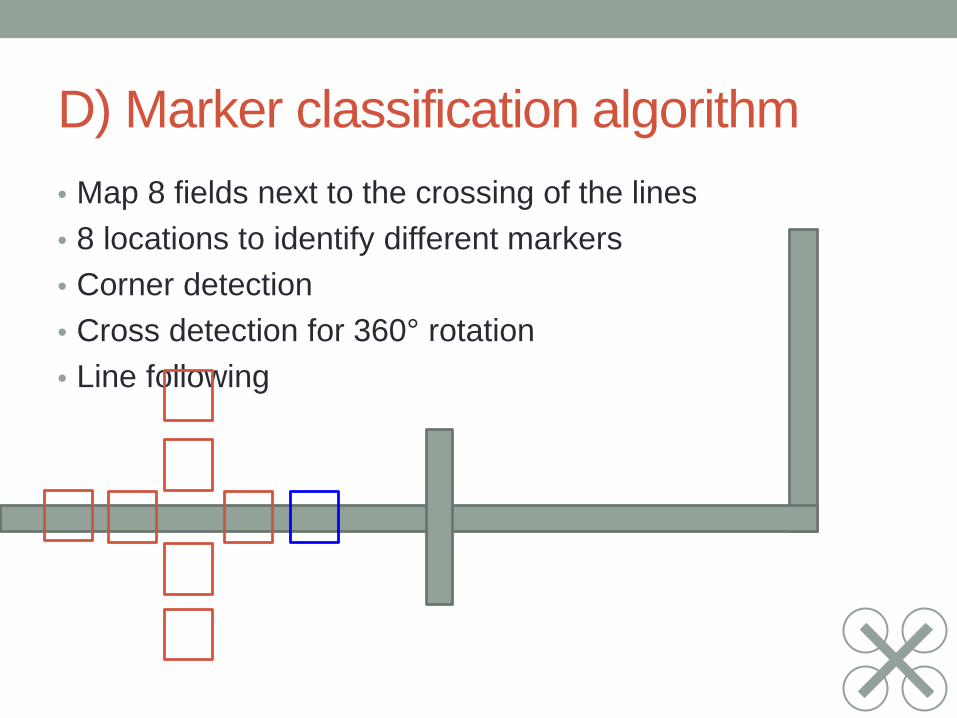
D) Marker classification algorithm • Map 8 fields next to the crossing of the lines • 8 locations to identify different markers • Corner detection • Cross detection for 360° rotation • Line following

D) Marker classification algorithm
Low fps due to manual debugging
Bitfields of squared where a line is detected
0
1
Angles of lines detected
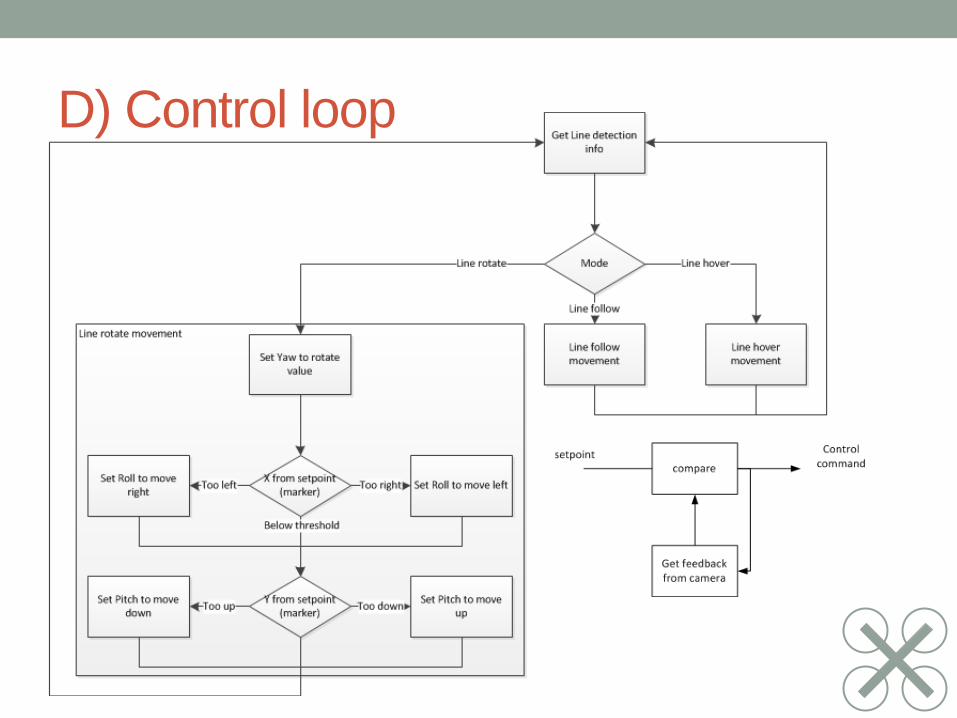
D) Control loop

D) Global control (SW)

E) Environment mapping • Virtual 3d map of the environment • Navigation purposes (Autonomous navigation) • Search and rescue • Digitalization of buildings

E) Point cloud • Kinect Depth image
• UDP Stream with depth image from Beagle Board
• Use PCL (Piont Cloud Library) for stitching
• Mixture Java and C++
• JNI for java to C++ communication
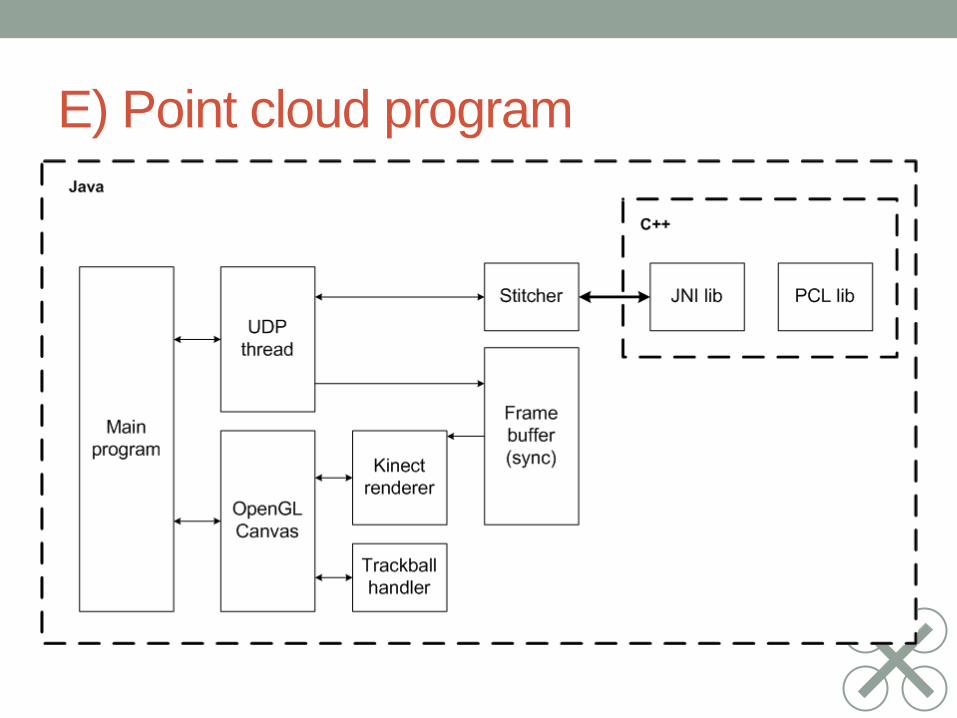
E) Point cloud program

E) Stitching phases
Existing
New
Alignment Difference New frame
Update existing
E) Iterative Closest Point steps 1. Find for each point the closest point in the second
cloud. 1. Linear search 2. K-nearest neighbors search
2. Find the transformations per previews found points. 1. Mean square cost function
3. Transform the points. 4. Iterate this process.
Results • A) Quadcopter is built
• B) Is flying stable
• C+D) Algorithm are working correctly
• But cannot track the line over time
• Too small webcam angle
• Too slow processing
• E) Showing mapping
• Mapping does not grow
• ICP not working correctly

Quadcopter result

Recommendations • Wide angle lens • Acceleration of algorithms
• DSP • Resolution down scaling
• Mapping • Do not use JNI within mapping program • Build program complete in PCL

Demo

Questions?
? ? ?


Obstacle Detection
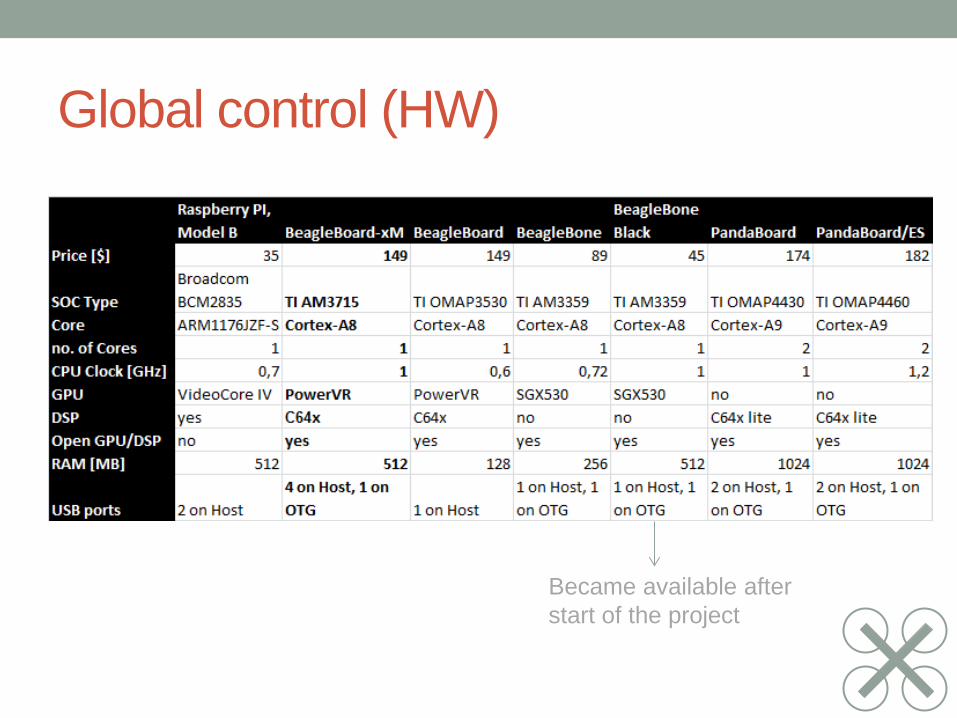
Global control (HW)
Became available after start of the project
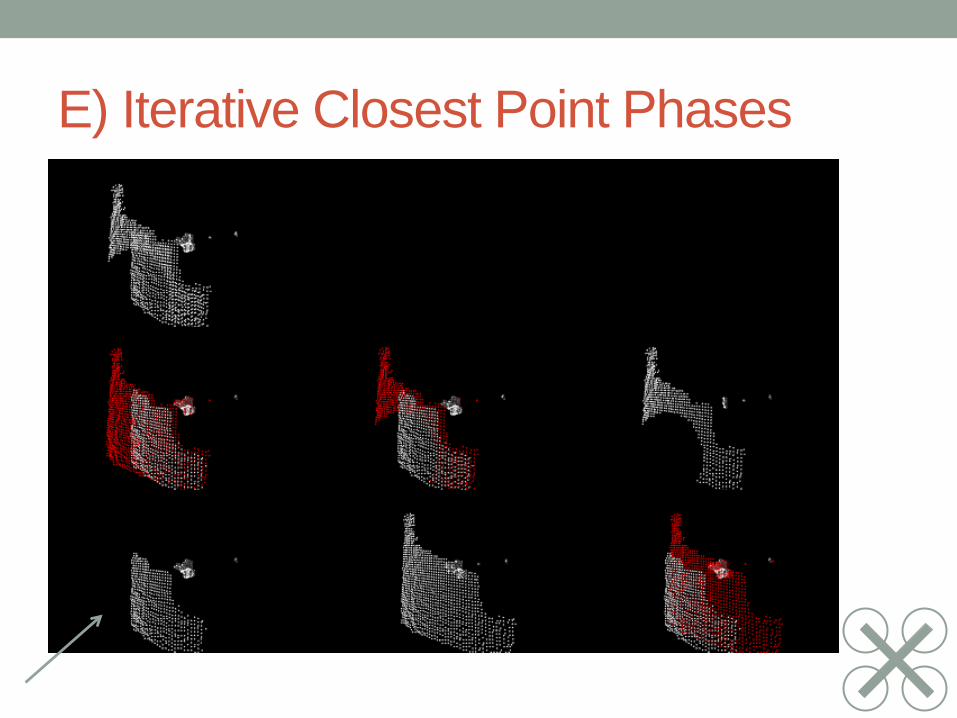
E) Iterative Closest Point Phases