Embed Size (px)
Citation preview

J EconDOI 10.1007/s00712-013-0344-6
Radial and directional measures of the rateof technical change
Rolf Färe · Giannis Karagiannis
Received: 5 December 2012 / Accepted: 8 April 2013© Springer-Verlag Wien 2013
Abstract In this paper we develop radial and directional measures of the rate oftechnical change for the class of directional distance functions. For both types, wedistinguish between primal and dual measures while the former are further dividedinto oriented (input- and output-based) and non-oriented. We highlight the pivotalrole of translation elasticity in examining the interrelationships among the alternativedirectional measures and that of scale elasticity in the case of radial measures. Wealso show that the radial and directional measures are related one another through thenormalized (with the value of the direction vector) dual functions.
Keywords Rate of technical change · Directional distance functions
JEL Classification D21 · D24
1 Introduction
The rate of technical change provides a local measure of the shift in the productionfrontier between two periods. In the single-output case, the rate of technical changeas defined by Solow (1957) measures the rate at which output can increase as timeelapses holding inputs constant. This proportional change is indeed equal to the partial
R. FäreDepartment of Economics, Oregon State University, Corvallis, OR, USAe-mail: [email protected]
R. FäreDepartment of Agricultural and Resource Economics, Oregon State University, Corvallis, OR, USA
G. Karagiannis (B)Department of Economics, University of Macedonia, 156 Egnatia Street, Thessaloniki 54006, Greecee-mail: [email protected]
123

R. Färe, G. Karagiannis
logarithmic derivative of the production function with respect to time. Caves et al.(1981) generalized Solow (1957) measure to the case of multi-output technologieswhere two alternatives can be considered. First, the output-based measure, whichis defined as the common rate that technological improvements allow all outputsto increase over time holding inputs constant and second, the input-based measure,defined as the common rate at which all inputs can decrease over time holding outputsconstant. Since a common rate of change in either outputs or inputs is assumed in theabove definitions, the aforementioned measures of the rate of technical change arereferred to as radial or proportional.
Caves et al. (1981) shown in addition that the radial output- and input-based mea-sures of the rate of technical change are related one another through the scale elasticity.In particular, the output-based measure is less (greater) than the input-based measureunder decreasing (increasing) returns to scale while they are equal under constantreturns to scale.1 Even though Caves et al. (1981) employed a transformation functionto derive this result, it can be shown that holds for all other function representationsof multi-output, multi-input technologies, such as the Shephard-type input and outputdistance functions.2 On the other hand, the primal (i.e., input- and output-based) mea-sures can also be linked with the dual (i.e., cost-, revenue- and profit-based) measuresof the rate of technical change.3 It has been shown in particular that the cost- andthe input-based measures are equal to each other (Caves et al. 1981; Atkinson andCornwell 1998) as are the revenue- and the output-based measures (Fulginiti 2010).Moreover, the input- and the output-based measures are related to the profit-basedmeasure by means of the scale elasticity (Bernstein 1994; Karagiannis and Mergos2000), which has also a pivotal role in linking the alternative dual (i.e., cost-, revenue-and profit-based) measures of technical change (Karagiannis and Xepapadeas 2009).
The main objective of this paper is to develop measures of the rate of technicalchange for the class of directional distance functions. We not only consider output-and input-based measures as was done for the other function representations of thetechnology, but we develop both radial (proportional) and directional measures ofthe rate of technical change. The former are analogous to the conventional measuresconsidering radial changes in inputs and/or outputs such that their proportions remainunchanged while the latter deal with non-proportional changes in either inputs, outputsor both along the direction of the reference vector. We show that the proposed threeprimal directional measures of the rate of technical change are related one anotherthrough the translation elasticity.4 We also derive relations between the primal andthe dual directional measures of the rate of technical change and we show that are
1 Notice that a there is similar relationship between the input- and the output-based measures of technicalefficiency; see Färe and Lovell (1978).2 Notice that the Shephard-type output (input) distance function can be viewed as a transformation functionthat is homogenous of degree one in outputs (inputs).3 Ohta (1974) initiated this line of research by establishing the relation between the cost function- and theproduction function-based measures of the rate of technical change by means of scale elasticity. Note thatthe production function-based is indeed an output-based measure of the rate of technical change.4 The notion of translation elasticity, introduced by Färe and Karagiannis (2011), is presented in the nextsection.
123

Radial and directional measures
also linked to each other with the translation elasticity. Finally, we relate radial anddirectional measures by means of the normalized (by the value of the direction vector)dual functions.
Even though the choice between directional and radial measures is by and largean empirical matter closely related to the study under consideration, there are severalcases where the radial measures do not suffice to provide plausible estimates of the rateof technical change. For example, in the presence of undesirable outputs, such as pol-lution or non-performing loans, the output-based radial measure provides implausibleestimates of the rate of technical change as it fails to credit expansion of good outputsand to debit bad outputs production. Instead it measures the proportional increase ofboth good and bad outputs that is made possible by technical change from a giveninput bundle. In contrast, the output-based directional measure provides more reason-able estimates of the rate of technical change as allows for simultaneous increases ingood outputs and decreases in bad output. Another example refers to the case of spe-cialized and diversified firms: e.g., some power plants may produce only electricity,others produce only heating and some may produce both. For the specialized firms,the radial measure due to its proportional nature could only account for the expansionof the currently produced outputs neglecting the possibility that technical change mayfavor the development of more diversified production plans. However, the directionalmeasure due to its additive nature can accommodate that option.
2 Notation and background
Lets x ∈ Rn+ denote a vector of inputs and y ∈ Rm+ a vector of outputs with w ∈ Rn++and p ∈ Rm++ being their corresponding price vectors. Technology is defined in termsof T = {(x, y) : x can produce y}, which is closed and convex, allows for freedisposability of inputs and outputs, and contains (0n, 0m). The directional technologydistance function, which is a variant of Luenberger (1995) shortage function, is definedas (Chambers et al. 1998):
�DT (x, y; gx , gy) = sup{β : (x − βgx , y + βgy) ∈ T
} ≥ 0
where (gx , gy) ∈ Rn+ × Rm+ is the direction vector.5 The directional technologydistance function is non-decreasing in x , non-increasing in y, concave in x andy, homogenous of degree -1 in (gx , gy), and satisfies the translation property, i.e.,�DT (x − αgx , y + αgy; gx , gy) = �DT (x, y; gx .gy)−α ∀α ∈ R which assuming dif-
ferentiability is equivalent to (∇x �DT (x, y; gx , gy))′gx−(∇y �DT (x, y; gx , gy))
′gy =1(Chambers 2002), with the prime ( ′ ) denoting the transpose symbol.
The directional technology distance function is general enough and contains allother forms of directional functions as special cases. In particular, the restriction gy =0 results in the directional input distance function while gx = 0 gives the directionaloutput distance function; for their properties see, for example, Färe and Grosskopf
5 Notice that gx is subtracted from the input quantity vector x while gy is added to the output quantityvector y.
123

R. Färe, G. Karagiannis
(2004). On the other hand, gx = 1 and gy = 1 result in the translation technologyfunction, gx = 0 and gy = 1 give the translation output function, and gx = 1 and gy =0 the translation input function; their properties can be found in Chambers (1998).Finally, gx = x and gy = y result in the proportional distance function (Briec 1997).
In addition, the following properties are related to the structure of production: first,technology exhibits constant returns to scale and �DT (x, y; gx , gy) is homogenous ofdegree 1 in (x, y) if �DT (λx, λy; gx , gy) = λ �DT (x, y; gx , gy) for λ > 0 (Briec et al.2003), which is equivalent to (∇x �DT )′x + (∇y �DT )′y = 0 when �DT (x, y; gx , gy) isdifferentiable. The scale elasticity is then defined as (see e.g. Färe and Karagiannis2011):
ρ = − (∇x �DT )′x(∇y �DT )′y
(1)
Second, production technology is characterized by graph translation homotheticity if�DT (x +γ gx , y+γ gy; gx , gy) = �DT (x, y; gx , gy)+γ for γ > 0, which is equivalent
to (∇x �DT )′gx + (∇y �DT )′gy = 0 when �DT (x, y; gx , gy) is differentiable (Chambers2002). The translation elasticity is then defined as (Färe and Karagiannis 2011):6
θ = − (∇x �DT )′gx
(∇y �DT )′gy= −
(
1 + 1
(∇y �DT )′gy
)
= −(
1 − 1
(∇x �DT )′gx
)−1
(2)
On the other hand, from the duality between the profit and the directional technologydistance functions we have (Chambers et al. 1998):
π(p, w) = maxx,y
{p′y − w′x + �DT (x, y; gx , gy)(p′gy + w′gx )
}(3a)
and the first-order conditions are (Chambers 2002; Hudgins and Primont 2007):
−w + ∇x �DT (p′gy + w′gx ) = 0
p + ∇y �DT (p′gy + w′gx ) = 0(3b)
Then using (3a), (3b) it can be shown that ρ = w′x/p′y and θ = w′gx/p′gy , whichprovide a kind of a “return to the dollar” interpretation to both the returns to scale andthe returns to translation.
3 Directional measures of the rate of technical change
We begin with the primal directional measures of the rate of technical change that areeither oriented (i.e., input- or output-based) or non-oriented considering simultaneouschanges in inputs and outputs. Lets assume that due to improvements in technology
6 The last two equalities in (2) are obtained by using the translation property, i.e.,(∇x �DT (x, y; gx , gy))′gx − (∇y �DT (x, y; gx , gy))′gy = 1.
123

Radial and directional measures
inputs and outputs can change in the direction of the reference vector by respectively−μgx and λgy in such a way that �DT (x − μgx , y + λgy, t; gx , gy) = 0 , with μ,
λ > 0 being the input and the output translation factors and t a time index that servesas a proxy for technical change. Then, given that the direction vector is predetermined,the total differential of �DT (x − μgx , y + λgy, t; gx , gy) = 0 results in:7
−(∇x �DT
)′gx dμ +
(∇y �DT
)′gydλ + ∂ �DT
∂tdt = 0 (4)
Since dλ = 0 for the input-based measures, (4) can be rewritten as:
(∇x �DT
)′gx
(dμ
dt
)= ∂ �DT
∂t= �DT
t (5)
Then solving (5) for dμ/dt , namely the marginal change in the input translation factorover time holding outputs constant, we have:
Definition 1 In terms of the directional technology distance function, the primal input-based directional measure of the rate of technical change �DT I
gxis defined as:
�DT Igx
= dμ
dt= −
[(∇x �DT )′gx
]−1 �DTt (D1)
which gives the maximum number of times the input direction vector is allowed bytechnical change to be subtracted from input quantities and still produce a given amountof outputs.
The output-based measure on the other hand requires dμ = 0 and thus (4) can berewritten as:
(∇y �DT
)′gy
(dλ
dt
)= �DT
t (6)
Then solving (6) for dλ/dt , namely the marginal change in the output translationfactor over time holding inputs constant, yields:
Definition 2 In terms of the directional technology distance function, the primaloutput-based directional measure of the rate of technical change �DT O
gyis defined as:
�DT Ogy
= dλ
dt=
[(∇y �DT )′gy
]−1 �DTt (D2)
which gives the maximum number of times the output direction vector is allowed bytechnical change to be added to output quantities without altering the amount of inputsused.
7 Notice that total differential hereon will involve directional derivatives for inputs and outputs and conven-tional derivatives for the technical change index. For the definition of directional derivatives see (Rockafellar1970, p. 241).
123

R. Färe, G. Karagiannis
H
C
E
D
B
A
y
3y
2y
1y
yg
1( , )F x t
0( , )F x t
3x2x1x xxg−
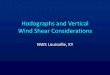
Fig. 1 Primal directional measures of the rate of technical change
It is also natural for the directional technology distance function to consider thecase where dμ = dλ = dα, i.e., a common marginal change in both the input and theoutput translation factors. Then (4) simplifies to:
[−(∇x �DT )′gx + (∇y �DT )′gy
] (dα
dt
)= − �DT
t (7)
Solving (7) for dα/dt by taking into account the translation property results in:
Definition 3 In terms of the directional technology distance function, the primal non-oriented directional measure of the rate of technical change �DT
g is defined as:
�DTg = dα
dt= �DT
t = ∂ �DT
∂t(D3)
which gives the common number of times the input and the output direction vectorsare allowed by technical change to respectively be subtracted from input quantitiesand added to output quantities.
(D3) is the parametric analog of the technical change component used by Chamberset al. (1996) in the non-parametric decomposition of the Luenberger productivityindicator.
A diagrammatic presentation of these three primal measures is given Fig. 1 where weconsider the case of a single-input, single-output technology. In this case the directionaltechnology distance function is equal to F(x, t0)− y, where F(x, t0) is the productionfrontier at period t0, and it measures the distance of an observed point to the frontieralong the direction (gy,−gx ). For the input-output bundle depicted by point A, thisdistance is equal to AB/AH. With progressive technical change, the production frontiershifts to F(x, t1) at period t1. Given that the rate of technical change is measured
123

Radial and directional measures
between points lying on the frontier, �DTg depicts the movement from point B to point
C and it represents the rate of simultaneous input contraction and output expansion bymoving along the direction (gy,−gx ). That is, it measures the length of the segmentBC. On the other hand, in this single-input, single-output case �DT I
gxcorresponds to
the length of the segment BE while �DT Ogy
to the length of the segment BD. From Fig.
1 we can see that �DTg represents a smaller input contraction than �DT I
gxand a smaller
output expansion than �DT Ogy
.8
In addition, as is stated in the following proposition, the aforementioned threealternative primal measures of the rate of the technical change are related one anotherby means of the translation elasticity:
Proposition 1 �DT Ogy
= θ �DT Igx
= (1 + θ) �DTg .
Proof The third equality in (2) and (D1) give �DT Igx
= − [(1 + θ)/θ] �DTt . Similarly,
from the second equality in (2) and (D2) we have �DT Ogy
= (1 + θ) �DTt . Then the results
follow by combing these two relationships with (D3).
Corollary 1 Under constant returns to translation (θ = 1), �DT Igx
= �DT Ogy
= 2 �DTg .
Hence, constant returns to translation imply that the primal input- and output-baseddirectional measures of the rate of technical change are equal to each other, and eachoriented (input or output) measure is twice the non-oriented measure.9 However, sinceθ > 0, we can infer from Proposition 1 that the non-oriented measure tends to under-estimate the rate of technical change compared to both the input- and the output-basedmeasures. Moreover, �DT O
gy> �DT I
gx> �DT
g for θ > 1 and �DT Igx
> �DT Ogy
> �DTg
for θ < 1. That is, the output-based (input-based) directional measure provides themore optimistic estimate of the rate of technical change under increasing (decreasing)returns to translation.
To obtain a directional profit-based measure of the rate of technical change we relyon the duality between the profit and the directional technology distance function in(3a). Differentiating (3a) with respect to t results in:
∂π
∂t= (w′gx + p′gy) �DT
t (8)
This can loosely be viewed as ∂π/∂t = (∂π/∂φ)(∂φ/∂t) where ∂π/∂φ = p′gy +w′gx is the rise in profit from a small “improvement in technology” depicted by theshift of the directional technology distance function in the direction of the referencevector (Chambers et al. 1998; Hudgins and Primont 2007). Using a similar reasoningwe interpret analogously the following relationship:
8 Notice that in the single-input, single-output case, �DT Igx coincides with the input-based radial measure of
technical change as defined in (D9) and �DT Ogy coincides with the output-based radial measure as given in
(D10).9 This result is analogous to that of Boussemart et al. (2003) where the logarithm of the Malmquist index(i.e., the oriented TFP measure) is roughly twice the Luenberger indicator (i.e., the non-oriented TFPmeasure) under graph translation homotheticity, which is equivalent to constant returns to translation.
123

R. Färe, G. Karagiannis
∂π
∂t= (w′gx ) �DT I
gx= (p′gy) �DT O
gy(9)
which is derived from (8), (D3), Proposition 1 and θ = w′gx/p′gy . In (9), w′gx refersto the rise in profit from a small improvement in the ability to produce the same amountof output with a smaller quantity of inputs, and p′gy to the rise in profit from a smallimprovement in the ability to produce more output from the same amount of inputs.
Then a directional profit-based measure of the rate of technical is obtained bynormalizing the over time change in profits ∂π/∂t with what (Chambers et al. 1998,p. 360) called “the value of the reference input-output combination”, namely, p′gy +w′gx , in order to make it independent of the units of measurement. That is,
Definition 4 The dual profit-based directional measure of the rate of technical changeπ
gt is defined as:
πgt = ∂π
∂t(w′gx + p′gy)
−1 (D4)
which represents the normalized change in profits or the change in real profits thatresults from technological improvements holding input and output prices constant.
An alternative definition and interpretation of the profit-based directional measureof the rate of technical change π
gt may be given through the normalized (by the value
of the direction vector) profit function π̃( p̃, w̃, t), where p̃ = p/(w′gx + p′gy) andw̃ = w/(w′gx + p′gy). The normalized and the conventional profit functions arerelated one another by the virtue of linear homogeneity of the former in p̃ and w̃ (seeBalk 1998, p. 170):
π(p, w, t) = π̃( p̃, w̃, t)(w′gx + p′gy) (10)
Then by differentiating (10) with respect to time and using (D4) we get
πgt = ∂π̃
∂t(D4’)
which may be interpreted as the change in normalized maximum profit holding nor-malized input and output prices constant.
The following proposition relates the primal and dual directional measures of therate of technical change:
Proposition 2 πgt = �DT
g =(
θ1+θ
) �DT Igx
=(
11+θ
) �DT Ogy
.
Proof The first equality follows immediately from (8) using (D3) and (D4). The othertwo are derived by dividing (9) by p′gy + w′gx and using θ = w′gx/p′gy .
Thus �DTg may equivalently be interpreted as the amount that real profits could
change because of technical change holding input and output prices constant.The above four alternative directional measures of the rate of technical change
are readily applicable to the translation technology function and to the proportional
123

Radial and directional measures
distance function after the necessary adjustments are made. Indeed this requires onlythe substitution of the appropriate direction vectors into (D1)–(D4).
In the case of the directional input (output) distance function and of the translationinput (output) function it is natural to rely on the input-based (output-based) measuresof technical change. In the rest of this section we develop the main results in terms ofthe directional input and output distance functions but we can easily verify that theyalso hold for the translation input and output functions after making the appropriateadjustments in the direction vectors.
Lets consider the directional input distance function first and assume that due toimprovements in technology inputs can change in the direction of the reference vec-tor by −μgx , in such a way that �DI (x − μgx , y, t; gx ) = 0. Then given that gx ispredetermined, the total differential of �DI (x − μgx , y, t; gx ) = 0 yields:
−(∇x �DI
)′gx dμ +
(∇y �DI
)′dy + ∂ �DI
∂tdt = 0 (11)
Since dy = 0 for the input-based measures of the rate of technical change, (11) reducesto:
(∇x �DI
)′gx
(−dμ
dt
)= ∂ �DI
∂t= − �DI
t (12)
Then solving (12) for dμ/dt by taking into account the translation property of thedirectional input distance function (i.e., (∇x �DI )′gx = −1 assuming differentiability)results in:
Definition 5 In terms of the directional input distance function, the primal input-baseddirectional measure of rate of technical change �DI I
gxis defined as:
�DI Igx
= dμ
dt= �DI
t = ∂ �DI
∂t(D5)
which gives the maximum number of times the input direction vector is allowed bytechnical change to be subtracted from input quantities and still produce a given amountof outputs.
To obtain a directional cost-based measure of the rate of technical change we relyon the duality between the cost and the directional input distance functions, i.e.:
C(w, y, t) = minx
{w′x − �DI (x, y, t; gx )w
′gx
}(13)
Differentiating (13) with respect to t results in:
− ∂C
∂t= (w′gx ) �DI
t (14)
which is converted to a directional cost-based measure of the rate of technical changeby means of a normalization ensuring its independence from units of measurement:
123

R. Färe, G. Karagiannis
Definition 6 The dual cost-based directional measure of the rate of technical changeCgx
t is defined as:
Cgxt = −∂C
∂t
(w′gx
)−1 (D6)
which represents the normalized change in cost or the change in real cost that resultsfrom technological improvements holding input prices and output quantities constant.
Analogously to (D4’) we may define the dual cost-based directional measure of the rateof technical change Cgx
t in terms of the normalized (by the value of the direction vector)cost function C̃(w̃, y, t), which by virtue of its linear homogeneity in w̃ = w/w′gx
is related to the conventional cost function in (13) as follows:
C(w, y, t) = C̃(w̃, y, t)(w′gx ) (15)
Then by differentiating (15) with respect to t and using (D6) we obtain:
Cgxt = −∂C̃
∂t(D6’)
which represents the change in normalized minimum cost holding output quantitiesand normalized input prices constant.
The following proposition relates primal and dual directional measures in (D5) and(D6):
Proposition 3 Cgxt = �DI I
gx.
Proof It follows immediately from (D5), (D6) and (14).In a similar way we can obtain the relevant measures for the directional output
distance function:
Definition 7 In terms of the directional output distance function, the primal output-based directional measure of rate of technical change �DO O
gyis defined as:
�DO Ogy
= �DOt = ∂ �DO
∂t(D7)
which gives the maximum number of times the output direction vector is allowed bytechnical change to be added to output quantities without altering the amount of inputsused.
Definition 8 The dual revenue-based directional measure of the rate of technicalchange Rg
t is defined as:
Rgyt = ∂ R
∂t(p′gy)
−1 (D8)
In addition, by using the following relationship between the conventional and thenormalized revenue functions:
123

Radial and directional measures
R(p, x, t) = R̃( p̃, x, t)(p′gy) (16)
we also define the dual revenue-based directional measure of the rate of technicalchange as:
Rgyt = ∂ R̃
∂t(D8’)
where p̃ = p/p′gy . Thus Rgt may equivalently be interpreted as either the change in
real revenue that results from technological improvements holding output prices andinput quantities constant or the change in normalized maximum revenue holding inputquantities and normalized output prices constant.
Then the primal and dual directional measures of the rate of technical change derivedin (D7) and (D8) are related one another as follows:
Proposition 4 Rgyt = �DO O
gy.
Moreover, we can now link the three dual directional measures as well as the fiveprimal directional measures by means of the following two propositions:
Proposition 5 πgt = Cgx
t
(θ
1+θ
)= R
gyt
(1
1+θ
)
Proof From the dual relationship between profit, cost and revenue functions we knowthat ∂π/∂t = −∂C/∂t = ∂ R/∂t . Use this, (D6), θ = w′gx/p′gy and multiply anddivide the right-hand side of (D4) by w′gx to derive the first equality. For the second,multiply and divide the right-hand side of (D4) by p′gy and use (D8) instead.
Proposition 6 �DT Ogy
= �DO Ogy
and �DT Igx
= �DI Igx
.
Proof The first relation is obtained by combining the results of Propositions 2, 3 and 5,and the second that of 2, 4 and 5.
From Propositions 1 and 6 one can verify that since θ > 0 the non-oriented measureof the rate technical change defined in terms of the directional technology distancefunction is less than the input-based measures defined in terms of the directional inputdistance function and also less than the output-based measure defined in terms of thedirectional output distance function; that is, �DI I
gx> �DT
g and �DO Ogy
> �DTg .
From Propositions 1, 5 and 6 we immediately get:
Corollary 2 Under constant returns to translation (θ = 1), �DI Ig = �DO O
g = 2 �DTg .10
Corollary 3 Under constant returns to translation (θ = 1), Cgt = Rg
t = 2πgt .
10 An alternative proof is as follows: Chambers (2002) Lemma 2 shows that graph translation homotheticity,which is equivalent to constant returns to translation (Färe and Karagiannis 2011), implies that �DI = �DO .Then �DI
t = �DOt and using (D5) and (D7) the first equality follows. The second equality follows by
combining (D3), (D5), (D7) and Briec and Kerstens (2004) Proposition 2 which shows that �DI = �DO =2 �DT under graph translation homotheticity and thus �DI
t = �DOt = 2 �DT
t .
123

R. Färe, G. Karagiannis
Table 1 Relating directional measures of the rate of technical change
�DTg
�DT Igx
�DT Ogy
�DI Igx
�DO Ogy Cgx
t Rgyt π
gt
�DTg 1 θ/(1 + θ) (1 + θ)−1 θ/(1 + θ) (1 + θ)−1 θ/(1 + θ) (1 + θ)−1 1
�DT Igx 1 θ−1 1 θ−1 1 θ−1 (1 + θ)/θ
�DT Ogy 1 θ 1 θ 1 1 + θ
�DI Igx 1 θ−1 1 θ−1 (1 + θ)/θ
�DO Ogy 1 θ 1 1 + θ
Cgxt 1 θ−1 (1 + θ)/θ
Rgyt 1 1 + θ
πgt 1
Combining now the results of the aforementioned propositions and corollaries wecan relate all primal and dual directional measures by means of the translation elasticityas follows:
θ < 1 πgt = �DT
g < �DO Og = �DT O
g = Rgt < �DI I
g = �DT Ig = Cg
t
θ > 1 πgt = �DT
g < �DI Ig = �DT I
g = Cgt < �DO O
g = �DT Og = Rg
t
θ = 1 2πgt = 2 �DT
g = �DO Og = �DT O
g = Rgt = �DI I
g = �DT Ig = Cg
t
Thus under decreasing (increasing) returns to translation, the non-oriented measuresare less than the output-based (input-based) measures and these in turn are less thatthe input-based (output-based) measures. Under constant returns to translation (i.e.,graph translation homotheticity), input- and output-based measures are equal and theirmagnitude is twice that of the non-oriented measures.
Corollary 4 If the technology exhibits simultaneously input-and-output translationhomotheticiy then 2 �DT
g = �DI Igx
+ �DO Ogy
.
Proof Färe and Grosskopf (2000) defined simultaneous input-and-output translationhomotheticity as: 2 �DT (x, y, t; gx , gy) = �DI (x, 1, t; gx )+ �DO(1, y, t; gy). Then theresult follows by differentiating both sides of this relation with respect to t and using(D3), (D5) and (D7).
The results of this section are summarized in Table 1, which is symmetric and theelements of the lower triangular block are the inverse of those in the upper block.11
Before turning to radial measures, we may comment on the implications of parallelneutrality (see Briec et al. 2006; Briec and Peypoch 2007). One can verify that under
11 Even though we have focused exclusively on directional functions, the proposed directional measures ofthe rate of technical change are readily applicable to all non- directional function representations of produc-tion technology, such as the Shephard-type distance functions, production and transformation functions.
123

Radial and directional measures
input parallel neutrality, both the primal input-based (D5) and the dual cost-based (D6)measures depend only on output quantities and the passage of time. Similarly, underoutput parallel neutrality, both the primal output-based (D7) and the dual revenue-based (D8) measures depend only on input quantities and the passage of time. More-over, under input and output parallel neutrality the directional measures of the rate oftechnical change in (D5), (D6), (D7) and (D8) depend only on the passage of time.
4 Radial (proportional) measures of the rate of technical change
We now assume that due to improvements in technology inputs and outputs changeproportionally in such a way that their combination remains at the frontier. Given thatthe directional vector is predetermined, the total differential of �DT (x, y, t; gx , gy) = 0gives:
[(∇x �DT )′x
]d ln x +
[(∇y �DT )′y
]d ln y + ∂ �DT
∂tdt = 0 (17)
For the input-based measure d ln y j = 0 and d ln xi = d ln μ. Substituting these intothe above relationship results in:
−[(∇x �DT )′x
] d ln μ
dt= − �DT
t (18)
Then solving (18) for d ln μ/dt , namely the proportional change in the input translationfactor over time holding outputs constant, we have:
Definition 9 In terms of the directional technology distance function, the primal input-based radial measure of the rate of technical change �DT I is defined as:
�DT I =[(∇x �DT )′x
]−1 �DTt (D9)
which reflecting its input-saving nature gives the common rate at which all inputs candecrease over time holding outputs constant.
On the other hand, d ln y j = d ln λ and d ln xi = 0 in the case of the output-basedmeasure. Substituting these into (17) yields:
[(∇y �DT )′y
] d ln λ
dt= − �DT
t (19)
which can be solved for d ln λ/dt , namely the proportional change in the outputtranslation factor over time holding inputs constant, to give:
Definition 10 In terms of the directional technology distance function, the primaloutput-based radial measure of the rate of technical change �DT O is defined as:
�DT O = −[(∇y �DT )′y
]−1 �DTt (D10)
123

R. Färe, G. Karagiannis
which reflecting its output-expanding nature measures the common rate at which alloutputs can grow over time holding inputs constant.
The above proportional measures of the rate of the technical change are related oneanother by the degree of returns to scale:
Proposition 7 �DT O = ρ �DT I
Proof It follows immediately by combining (D9), (D10) and the definition of returnsto scale in (1).
Corollary 5 Under constant returns to scale (ρ = 1), �DT I = �DT O.
One can verify that (D9) and (D10) provide respectively primal input- and output-based radial measures of the rate of technical change for all other forms of directionalfunctions. This can be shown by replicating (17), (18) and (19) in the cases of (a) thedirectional input and output distance functions, (b) the translation technology, inputand output functions, and (c) the proportional distance function. In addition, the resultsof Proposition 7 and Corollary 5 above apply to all other forms of directional functions.
On the other hand, using (8) and (10) it can be shown that:
πt = ∂ ln π
∂t= �DT
t
(p′gy + w′gx
π
)= ∂ ln π̃
∂t= π̃t (20)
where πt is the rate of profit augmentation defined as the proportional change in profitsholding input and output prices constant or equivalently as the proportional changein normalized profit when all normalized input and output prices remain unchanged.Then, the primal and the profit-based radial measures are related one another as fol-lows:
Proposition 8 πt = (1 − ρ)−1 �DT O = (ρ/(1 − ρ)) �DT I .
Proof It follows by substituting the first-order conditions (3b) into (20) and using(D9), (D10) and ρ = w′x/p′y.
Similarly, using (14) and (15) it can be shown that
Ct = −∂ ln C
∂t= �DI
t
(w′gx
C
)= −∂ ln C̃
∂t= C̃t (21)
where Ct is the rate of cost diminution defined as the proportional reduction in costholding input prices and output quantities constant or equivalently as the proportionalreduction in normalized cost when all normalized input prices and output quantitiesremain unchanged. In an analogous manner we have for the rate of revenue enhance-ment Rt :
Rt = ∂ ln R
∂t= �DO
t
(p′gy
R
)= ∂ ln R̃
∂t= R̃t (22)
Then, the relation between primal and dual radial measures is given in the followingproposition:
123

Radial and directional measures
Table 2 Relating radial (proportional) measures of the rate of technical change
�DT O �DT I �DI O �DI I �DO O �DO I
�DT O 1 ρ 1 ρ 1 ρ
�DT I 1 ρ−1 1 ρ−1 1
�DI O 1 ρ 1 ρ
�DI I 1 ρ−1 1
�DO O 1 ρ
�DO I 1
Rt 1 ρ 1 ρ 1 ρ
Ct ρ−1 1 ρ−1 1 ρ−1 1
πt (1 − ρ)−1 ρ/(1 − ρ) (1 − ρ)−1 ρ/(1 − ρ) (1 − ρ)−1 ρ/(1 − ρ)
T Ot 1 ρ 1 ρ 1 ρ
T It ρ−1 1 ρ−1 1 ρ−1 1
DI Ot 1 ρ 1 ρ 1 ρ
DI It ρ−1 1 ρ−1 1 ρ−1 1
DO Ot 1 ρ 1 ρ 1 ρ
DO It ρ−1 1 ρ−1 1 ρ−1 1
Proposition 9 Ct = �DI I = (1/ρ) �DI O and Rt = �DO O = ρ �DO I .
Proof The first relation follows by substituting the first-order conditions for (13) into(21) and using the definition of the primal input- and output-based radial measures ofthe rate of technical change in terms of the directional input distance function, namely�DI I = [(∇x �DI )′x]−1 �DI
t and �DI O = [(∇y �DI )′y]−1 �DIt , and ρ = w′x/p′y. In a
similar way we can prove the second relation.
The results from this section are summarized in the upper panel (rows one tonine) of Table 2.12 In addition, using the dual radial measures of the rate of technicalchange, namely, (20), (21) and (22), we can relate the primal input- and output-basedradial measures defined in terms of directional functions with those defined in termsof other function representations of production technology such as transformationand Shephard-type distance functions. For this purpose we combine the results ofthis section with those of Karagiannis and Xepapadeas (2009). We summarize thesefindings in the lower panel (last six rows) of Table 2.
5 Linking radial and directional measures
We are now in a position to relate radial and directional measures of the rate of technicalchange. The results are summarized in the following three propositions:
12 Notice that the first six rows and columns make a matrix that is symmetric and, as in Table 1, the elementsof the lower triangular block are the inverse of those in the upper block.
123

R. Färe, G. Karagiannis
Proposition 10 The primal input-based radial and directional measures of the rateof technical change are related one another by means of the normalized cost function;that is, �DT I
gx= C̃(w̃, y, t) �DT I and �DI I
gx= C̃(w̃, y, t) �DI I = C̃(w̃, y, t) �DO I .
Proof The two relations follow immediately by combining Propositions 3, 6, 9 and10 with (D6’), (D9) and (21).
Proposition 11 The primal output-based radial and directional measures of the rateof technical change are related one another by means of the normalized revenue func-tion; that is, �DT O
gy= R̃( p̃, x, t) �DT O and �DO O
gy= R̃( p̃, x, t) �DO O = R̃( p̃, x, t) �DI O.
Proof The two relations follow immediately by combining Propositions 4, 3, 9 and10 with (D8’), (D9) and (22).
Proposition 12 The dual radial and directional measures of the rate of technicalchange are related to one another by means of the corresponding normalized dualfunction; that is, π
gt = π̃( p̃, w̃, t)πt = π̃t , Cgx
t = C̃(w̃, y, t)Ct = C̃t and Rgyt =
R̃( p̃, x, t)Rt = R̃t .
Proof The first relation results from (D4’) and (20), the second from (D6’) and (21),and the third from (D8’) and (22).
Corollary 6 The radial and directional measures of the rate of technical changecoincide for the proportional distance function.
Proof In this case the normalized dual functions become equal to one and the resultfollows immediately from Propositions 10, 11, 12.
6 Concluding remarks
In this paper we develop directional and radial measures of the rate of technical changefor the class of directional distance functions. In particular, we propose six alternativedirectional measures, three of which are primal and three dual (i.e., profit-, cost- andrevenue-based) measures. Among the primal directional measures, we further distin-guish between non-oriented and oriented (i.e., input- and output-based). We examinehow these six measures are related one another and we highlight the pivotal role oftranslation elasticity in this respect. On the other hand, we propose five alternativeradial measures as we cannot consider a non-oriented primal measure in this case. Weshow that these radial measures are related one another through the scale elasticity.Finally, we relate radial and directional measures of the rate of technical change byusing the normalized (by the value of the direction vector) dual functions. This com-pletes the pictures among the directional distance function-based measures of the rateof technical change.
Acknowledgments We would like to thank two anonymous referees and Walter Briec for helpful com-ments on an earlier draft of this paper.
123

Radial and directional measures
References
Atkinson SE, Cornwell C (1998) Estimating radial measures of productivity growth: frontier vs non-frontierapproaches. J Prod Anal 10:35–46
Balk BM (1998) Industrial price. Quantity and productivity indices, the microeconomic theory and anapplication, Kluwer Academic Press, USA
Bernstein JI (1994) Exports. margins and productivity growth: with an application to the Canadian softwoodlumber industry. Rev Econ Stat 76:291–301
Briec W (1997) A graph-type extension of Farrell technical efficiency measure. J Prod Anal 8:95–110Briec W, Kerstens K (2004) A Luenberger-Hicks-Moorsteen productivity indicator: its relation to the Hicks-
Moorsteen productivity index and the Luenberger productivity indicator. Econ Theory 23:925–939Briec W, Peypoch N (2007) Biased technical change and parallel neutrality. J Econ 92:281–292Briec W, Dervaux B, Leleu H (2003) Aggregation of directional distance functions and industrial efficiency.
J Econ 79:237–261Briec W, Chambers RG, Färe R, Peypoch N (2006) Parallel Neutrality. J Econ 88:285–305Boussemart JP, Briec W, Kerstens K, Poutineau JC (2003) Luenberger and Malmquist productivity indices:
theoretical comparison and empirical illustration. Bull Econ Res 55:391–405Caves DW, Christensen LW, Swanson JA (1981) Productivity growth, scale economies, and capacity uti-
lization in US railroads, 1955–74. Am Econ Rev 71:994–1002Chambers RG (1998) Input and output indicators. In: Fare R, Grosskopf S, Russell RR (eds) Index numbers:
essays in honor of Sten Malmquist, Kluwer Academic Press, USA, pp 241–71Chambers RG (2002) Exact nonradial input, output and productivity measurement. Econ Theory 20:751–
765Chambers RG, Chung Y, Färe R (1998) Profit, directional distance functions, and Nerlovian efficiency.
J Optim Theory Appl 98:351–364Chambers RG, Färe R, Grosskopf S (1996) Productivity growth in APEC countries. Pacific Econ Rev
1:181–190Färe R, Grosskopf S (2000) On the separability of the profit function. J Optim Theory Appl 105:609–620Färe R, Grosskopf S (2004) New directions: efficiency and productivity, Kluwer Academic Press, USAFäre R, Karagiannis G (2011) Scale and translation elasticities for directional distance functionsFäre R, Lovell CAK (1978) Measuring the technical efficiency of production. J Econ Theory 19:150–162Fulginiti LE (2010) Estimating Griliches’ k-shifts. Am J Agric Econ 92:86–101Hudgins LB, Primont D (2007) Derivative properties of directional technology distance functions. In: Färe
R, Grosskopf S (eds) Aggregation, efficiency and measurement, Kluwer Academic Press, USA, pp 31–43Karagiannis G, Mergos GJ (2000) Total factor productivity growth and technical change in a profit function
framework. J Prod Anal 14:31–51Karagiannis G, Xepapadeas A (2009) Primal and dual measures of the rate of technical change: a synthesis
and some new resultsLuenberger D (1995) Microeconomic Theory. McGraw Hill, NYOhta M (1974) A note on the duality between production and cost functions: rate of returns to scale and
rate of technical change. Econ Stud Quart 25:63–65Rockafellar RT (1970) Convex analysis, Princeton University Press, PrincetonSolow RM (1957) Technical change and the aggregate production function. Rev Econ Stat 39:312–320
123