Embed Size (px)
Citation preview

Radiometric Self Calibration ∗
Tomoo MitsunagaMedia Processing Laboratories
Sony [email protected]
Shree K. NayarDepartment of Computer Science
Columbia [email protected]
Abstract
A simple algorithm is described that computes the ra-diometric response function of an imaging system, fromimages of an arbitrary scene taken using different ex-posures. The exposure is varied by changing either theaperture setting or the shutter speed. The algorithmdoes not require precise estimates of the exposures used.Rough estimates of the ratios of the exposures (e.g. F-number settings on an inexpensive lens) are sufficientfor accurate recovery of the response function as wellas the actual exposure ratios. The computed responsefunction is used to fuse the multiple images into a sin-gle high dynamic range radiance image. Robustness istested using a variety of scenes and cameras as well asnoisy synthetic images generated using 100 randomlyselected response curves. Automatic rejection of im-age areas that have large vignetting effects or temporalscene variations make the algorithm applicable to notjust photographic but also video cameras. Code for thealgorithm and several results are publicly available athttp://www.cs.columbia.edu/CAVE/.
1. Radiometric Response FunctionBrightness images are inputs to virtually all computervision systems. Most vision algorithms either explic-itly or indirectly assume that brightness measured by theimaging system is linearly related to scene radiance. Inpractice, this is seldom the case. Almost always, thereexists a non-linear mapping between scene radiance andmeasured brightness. We will refer to this mapping asthe radiometric response functionof the imaging sys-tem. The goal of this paper is to present a convenienttechnique for estimating the response function.
Let us begin by exploring the factors that influence theresponse function. In a typical image formation system,image irradianceE is related to scene radianceL as [8]:
E = Lπ
4(dh
)2 cos4 φ , (1)
where,h is the focal length of the imaging lens,d isthe diameter of its aperture andφ is the angle subtended
∗This work was supported in parts by an ONR/DARPA MURI grantunder ONR contract No. N00014-97-1-0553 and a David and LucilePackard Fellowship. Tomoo Mitsunaga is supported by the Sony Cor-poration.
by the principal ray from the optical axis. If our imag-ing system were ideal, the brightness it records wouldbe I = E t , where,t is the time the image detector isexposed to the scene. This ideal system would have alinear radiometric response:
I = L k e , (2)
where,k = cos4 φ/ h2 ande = (π d2 / 4) t. We willrefer toe as theexposureof the image, which could bealtered by varying either theaperture sized or thedura-tion of exposuret .
An image detector such as a CCD is designed to produceelectrical signals that are linearly related toI [14]. Un-fortunately, there are many other stages to image acqui-sition that introduce non-linearities. Video cameras of-ten include some form of “gamma” mapping (see [13]).Further, the image digitizer, inclusive of A/D conversionand possible remappings, could introduce its own non-linearities. In the case of film photography, the film it-self is designed to have a non-linear response [9]. Suchfilm-like responses are often built into off-the-shelf digi-tal cameras. Finally, the development of film into a slideor a print and its scanning into a digital format typicallyintroduces further non-linearities (see [5]).
The individual sources of radiometric non-linearities arenot of particular relevance here. What we do know isthat the final brightness measurementM produced byan imaging system is related to the (scaled) scene ra-dianceI via a response functiong, i.e. M = g ( I ).To map all measurementsM to scaled radiance valuesI , we need to find the inverse functionf = g−1, whereI = f ( M ). Recovery off is therefore the radiometriccalibration problem. It is common practice to estimatefby showing the imaging system a uniformly lit calibra-tion chart, such as the Macbeth chart [4], which includespatches of known relative reflectances. The known rel-ative radiancesI i of the patches and the correspondingmeasurementsM i are samples that are interpolated toobtain an approximation tof . It is our objective to avoidsuch a calibration procedure which is only suited to con-trolled environment.
2. Calibration Without ChartsRecent work by Mann and Picard [11] and Debevecand Malik [5] has demonstrated how the radiometric re-sponse function can be estimated using images of ar-

bitrary scenes taken under different known exposures.While the measured brightness values change with ex-posure, scene radiance valuesL remain constant. Thisobservation permits the estimation of the inverse func-tion f without prior knowledge of scene radiance. Oncef has been determined, the images taken under differentexposures can be fused into a single high dynamic rangeradiance image1.
Mann and Picard [11] use the functionM = α + β Iγ
to model the response curveg. The bias parameterα isestimated by taking an image with the lens covered, andthe scale factorβ is set to an arbitrary value. Considertwo images taken under different exposures with knownratioR = e1/e2. The measurementM (I ) in the first im-age (I is unknown) produces the measurementM (RI )in the second. A pixel with brightnessM (RI ) is soughtin the first image that would then produce the brightnessM(R2I ) in the second image. This search process is re-peated to obtain the measurement seriesM (I ), M (RI ),...., M (RnI ). Regression is applied to these samples toestimate the parameterγ. Since the model used by Mannand Picard is highly restrictive, the best one can hope forin the case of a general imaging system is a qualitativecalibration result. Nonetheless, the work of Mann andPicard is noteworthy in that it brings to light the mainchallenges of this general approach to radiometric cali-bration.
Debevec and Malik [5] have developed an algorithm thatcan be expected to yield more accurate results. They usea sequence of high quality digital photographs (about11) taken using precisely known exposures. This al-gorithm is novel in that it does not assume a restric-tive model for the response function, and only requiresthat the function be smooth. Ifp and q denote pixeland exposure indices, we haveMp,q = g(Ep.tq) orln f (Mp,q) = ln Ep + ln tq. With Mp,q andtq known,the algorithm seeks to find discrete sample ofln f (Mp,q)and scaled irradiancesEp. These results are used tocompute a high dynamic range radiance map. The al-gorithm of Debevec and Malik is well-suited when theimages themselves are not noisy and precise exposuretimes are available.
Though our goals are similar to those of the above inves-tigators, our approach is rather different. We use a flex-ible parametric model which can accurately represent awide class of response functions encountered in practice.On the other hand, the finite parameters of the model al-low us to recover the response functionwithoutpreciseexposure inputs. As we show, rough estimates (such asF-number readings on a low-quality lens) are sufficientto accurately calibrate the system as well as recover theactual exposure ratios. To ensure that our algorithm can
1For imaging systems with known response functions, the problemof fusing multiple images taken under different exposures has beenaddressed by several others (see [3], [10], [7] for examples). In [2], aCMOS imaging chip is described where each pixel measures the expo-sure time required to attain a fixed charge accumulation level. Theseexposure times can be mapped to a high dynamic range image.
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1
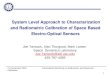
KODAK VISION 250D (FILM)FUJICOLOR F64D (FILM)FUJICHROME VELVIA (FILM)AGFACHROME RSX200 (FILM)CANON OPTURA (VIDEO)SONY DXC950 (γ = 1) (VIDEO)I
MFigure 1:Response functions of a few popular films and videocameras provided by their manufacturers. These examples il-lustrate that a high-order polynomial may be used to model theresponse function.
be applied to video systems, where it is easier to vary theaperture setting than the exposure time, we have imple-mented a pre-processing algorithm that rejects measure-ments with large vignetting effects and temporal changesduring image acquisition. The recovered response func-tion is used to fuse the multiple images into a high qual-ity radiance map. We have conducted extensive testingof our algorithm by using noisy synthetic data. In addi-tion, we have compared our calibration results for realimages with those produced using calibration charts.
3. A Flexible Radiometric Model
It is worth noting that though the response curve can varyappreciably from one imaging system to the next, it isnot expected to have exotic forms. The primary reasonis that the detector output (be it film or solid state) ismonotonic or at least semi-monotonic. Unless unusualmappings are intentionally built into the remaining com-ponents of the imaging system, measured brightness ei-ther increases or stays constant with increase in scene ra-diance (or exposure). This is illustrated by the responsefunctions of a few popular systems shown in Figure 1.Hence, we claim that virtually any response function canbe modeled using a high-order polynomial:
I = f (M ) =N∑
n=0
cn M n . (3)
The minimum order of the polynomial required clearlydepends on the response function itself. Hence, calibra-tion could be viewed as determining the orderN in ad-dition to the coefficientscn.
4. The Self-Calibration AlgorithmConsider two images of a scene taken using two differ-ent exposures,eq andeq+1 , whereRq,q+1 = eq /eq+1 .The ratio of the scaled radiance at any given pixelp can

written using expression (2) as:
Ip,qIp,q+1
=Lp kp eq
Lp kp eq+1
= Rq,q+1 . (4)
Hence, the response function of the imaging system isrelated to the exposure ratio as:
f (Mp,q)f (Mp,q+1)
= Rq,q+1 . (5)
We order our images such thateq < eq+1 and hence0 < Rq,q+1 < 1. Substituting our polynomial model forthe response function, we have:∑N
n=0 cn Mp,qn∑N
n=0 cn Mp,q+1n
= Rq,q+1 . (6)
The above relation may be viewed as the basis forthe joint recovery of the response function and the ex-posure ratio. However, an interesting ambiguity sur-faces at this point. Note that from (5) we also have(f (Mp,q)/f (Mp,q+1))u = Rq,q+1
u. This implies that,in general,f andR can only be recovered up to an un-known exponentu. In other words, an infinite numberof f -R pairs would satisfy equation (5).
Interestingly, thisu-ambiguity is greatly alleviated bythe use of the polynomial model. Note that, iff is apolynomial, f u can be a polynomial only ifu = vor u = 1/v wherev is a natural number, i.e.u =(., 1/3, 1/2, 1, 2, 3, .) . This by no means implies that,for any given polynomial, all these multiple solutionsmust exist. For instance, iff (M ) = M 3, u = 1/2 doesnot yield a polynomial. On the other hand,u = 1/3 doesresult inf (M ) = M which, in turn, can have its ownu-ambiguities. In any case, the multiple solutions that ariseare well-spaced with respect to each other. Shortly, thebenefits of this restriction will become clear.
For now, let us assume that the exposure ratiosRq,q+1
are known to us. Then, the response function can berecovered by formulating an error function that is thesum of the squares of the errors in expression (6):
E =Q−1∑q=1
P∑p=1
N∑n=0
cnMp,qn −Rq,q+1
N∑n=0
cnMp,q+1n
2
,
(7)where,Q is the total number of images used. If we nor-malize all measurements such that0 ≤ M ≤ 1 and fixthe indeterminable scale usingf (1) = Imax, we get theadditional constraint:
cN = Imax −N−1∑n=0
cn . (8)
The response function coefficients are determined bysolving the system of linear equations that result fromsetting:
∂E∂cn
= 0 . (9)
In most inexpensive imaging systems, photographic orvideo, it is difficult to obtain accurate estimates of theexposure ratiosRq,q+1 . The user only has access to theF-number of the imaging lens or the speed of the shutter.In consumer products these readings can only be takenas approximations to the actual values. In such cases,the restrictedu-ambiguity provided by the polynomialmodel proves valuable. Again, consider the case of twoimages. If the initial estimate for the ratio provided bythe user is a reasonable guess, the actual ratio is easilydetermined by searching in the vicinity of the initial esti-mate; we search for theR that produces thecn that min-imizeE . Since the solution forcn is linear, this search isvery efficient.
However, when more than two images are used the di-mensionality of the search forRq,q+1 is Q − 1. WhenQ is large, the search can be time consuming. For suchcases, we use an efficient iterative scheme where the cur-rent ratio estimatesRq,q+1
(k−1) are used to compute thenext set of coefficientscn
(k). These coefficients are thenused to update the ratio estimates using (6):
Rq,q+1
(k) =P∑
p=1
∑Nn=0 cn
(k)Mp,qn∑N
n=0 cn(k)Mp,q+1
n, (10)
where, the initial ratio estimatesRq,q+1
(0) are providedby the user. The algorithm is deemed to have convergedwhen:
| f (k)(M) − f (k−1)(M) | < ε , ∀M , (11)
whereε is a small number.
It is hard to embed the recovery of the orderN into theabove algorithm in an elegant manner. Our approachis to place an upper bound onN and run the algorithmrepeatedly to find theN that gives the lowest errorE . Inour experiments, we have used an upper bound ofN =10.
5. Evaluation: Noisy Synthetic Data
Shortly, we will present experiments with real scenesthat demonstrate the performance of our calibration al-gorithm. However, a detailed analysis of the behaviorof the algorithm requires the use of noisy synthetic data.For this, 100 monotonic response functions were gen-erated using random numbers for the coefficientscn ofa fifth-order polynomial. Using each response function,four synthetic images were generated with random ra-diance values and random exposure ratios in the range0.45 ≤ R ≤ 0.55. This range of ratio values is of par-ticular interest to us because in almost all commerciallenses and cameras a single step in the F-number settingor shutter speed setting results in an exposure ratio of ap-proximately 0.5. The pixel values were normalized suchthat0 ≤ M ≤ 1. Next, normally distributed noise withσ = 0.005 was added to each pixel value. This translatesto σ = 1.275 gray levels when0 ≤ M ≤ 255, as in thecase of a typical imaging system. The images were then

0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1M
I
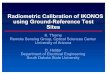
Figure 2:Self-calibration was tested using 100 randomly gen-erated response functions. Here a few of the recovered (solid)and actual (dots) response functions are shown. In each case,four noisy test images were generated using random exposureratios between image pairs in the range0.45 ≤ R ≤ 0.55.The initial ratio estimates were chosen to be 0.5.
0
2
4
6
8
10
0 10 20 30 40 50 60 70 80 90 100
TRIAL NUMBER
PE
RC
EN
TA
GE
E
RR
OR
IN
RE
SP
ON
SE
FU
NC
TIO
N
Figure 3:The percentage average error between actual and es-timated response curves for the 100 synthetic trials. The max-imum error was found to be 2.7%.
quantized to have 256 discrete gray levels. The algo-rithm was applied to each set of four images using initialexposure ratios ofRq,q+1
(0) = 0.5.
All 100 response functions and exposure ratios were ac-curately estimated. Figure 2 shows a few of the actual(dots) and computed (solid) response functions. As canbe seen, the algorithm is able to recover a large varietyof response functions. In Figure 3 the percentage of theaverage error (over allM values) between the actual andestimated curves are shown for the 100 cases. Despitethe presence of noise, the worst-case error was found tobe less than 2.7%.
Figure 4 shows the errorE plotted as a function of ex-posure ratioR. In this example, only two images areused and the actual and initial exposure ratios are 0.7and 0.625, respectively. The multiple local minima cor-respond to solutions that arise from theu-ambiguity de-scribed before. The figure illustrates how the ratio valueconverges from the initial estimate to the final one. In allour experiments, the algorithm converged to the correctsolution in less than 10 iterations.
1.00E-10
1.00E-09
1.00E-08
1.00E-07
1.00E-06
1.00E-05
0.1 0.3 0.5 0.7 0.9
Iterative Updating
Initial R Final R
E
RFigure 4: An example that shows convergence of the algo-rithm to the actual exposure ratio (0.7) from a rough initialratio estimate (0.625), in the presence of theu-ambiguity.
6. ImplementationWe now describe a few issues that need to be addressedwhile implementing radiometric self-calibration.
6.1. Reducing Video NoiseParticularly in the context of video, it is important to en-sure that the data that is provided to the self-calibrationalgorithm has minimal noise. To this end, we have im-plemented a pre-processing step that uses temporal andspatial averaging to obtain robust pixel measurements.Noise arises from three sources, namely, electrical read-out from the camera, quantization by the digitizer hard-ware [6], and motion of scene objects during data acqui-sition. The random component of the former two noisesources can be reduced by temporal averaging oft im-ages (typicallyt = 100). The third source can be omit-ted by selecting pixels of spatially flat area. To checkspatial flatness, we assume normally distributed noiseN(0, σ2). Under this assumption, if an area is spatiallyflat, sS2/σ2 can be modeled by theχ2 distribution [12],whereS is the spatial variance ofs pixel values (typi-cally s = 5 × 5). We approximateS2 with the spatialvarianceσ2
s of the temporally averaged pixel values, andσ2 with the temporal varianceσ2
t . Therefore, only thosepixels are selected that pass the following test:
s σs 2
σt 2≤ χ2
s−1(ψ) , (12)
where,ψ is the rejection ratio which is set to 0.05. Whentemporal averaging is not applied,t=1 andσt is set to0.01.
6.2. VignettingIn most compound lenses vignetting increases with theaperture size [1]. This introduces errors in the measure-ments which are assumed to be only effected by expo-sure changes. Vignetting effects are minimal at the cen-ter of the image and increase towards the periphery. Wehave implemented an algorithm that robustly detects pix-els that are corrupted by vignetting. Consider two con-secutive imagesq andq + 1. Corresponding brightnessmeasurementsMp,q andMp,q+1 are plotted against eachother. In the absence of vignetting, all pixels with thesame measurement value in one image should produce

f
f
f
1 / e~1
1 / e~2
1 / e~Q
M p, 1
M p, 2
M p, Q
I p, 1
I p, 2
I p, Q
I p, 2
I p, Q
I p, 1~
~
~
I pΣ w ( ) I p, q~
M p, q q=1
Q
Σ w ( )M p, q q=1
Q...
.
.
.
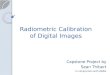
Figure 5:Fusing multiple images taken under different expo-sures into a single scaled radiance image.
equal measurement values in the second image, irrespec-tive of their locations in the image. The vignetting-freearea for each image pair is determined by finding thesmallest image circle within which theMp,q-Mp,q+1 plotis a compact curve with negligible scatter.
6.3. High Dynamic Range Radiance ImagesOnce the response function of the imaging system hasbeen computed, theQ images can be fused into a sin-gle high dynamic range radiance image, as suggested in[11] and [5]. This procedure is simple and is illustratedin Figure 5. Three steps are involved. First, each mea-surementMp,q is mapped to its scaled radiance valueIp,q using the computed response functionf . Next, thescaled radiance is normalized by the scaled exposureeqso that all radiance value end up with the same effec-tive exposure. Since the absolute value of eacheq isnot important for normalization, we simply compute thescaled exposures so that their arithmetic mean is equalto 1. The final radiance value at a pixel is then computedas a weighted average of its individual normalized radi-ance values. In previous work, a hat function [5] andthe gradient of the response function [11] were used forthe weighting function. Both these choices are some-what ad-hoc, the latter less so than the former. Note thata measurement can be trusted most when its signal-to-noise ratio (SNR) as well as its sensitivity to radiancechanges are maximum. The SNR for the scaled radiancevalueI is:
SNR = IdM
dI
1σN (M)
=f(M)
σN (M)f ′(M), (13)
where,σN (M) is the standard deviation of the measure-ment noise. Using the assumption that the noiseσN in(13) is independent of the measurement pixel valueM ,we can define the weighting function as:
w(M) = f(M)/f ′(M) . (14)
6.4. Handling ColorIn the case of color images, a separate response func-tion is computed for each color channel (red, green andblue). This is because, in principle, each color chan-nel could have its own response to irradiance. Sinceeach of the response functions can only be determinedup to a scale factor, the relative scalings between thethree computed radiance images remain unknown. Weresolve this problem by assuming that the three response
functions preserve the chromaticity of scene points. Letthe measurements be denoted asM = [Mr,Mg,Mb]T
and the computed scaled radiances beI = [Ir, Ig, Ib]T .Then, the color-corrected radiance values areIc =[krIr, kgIg, kbIb]T where, kr/kb and kg/kb are deter-mined by applying least-squares minimization to thechromaticity constraintIc/ || Ic ||= M/ ||M ||.
7. Experimental ResultsThe source code for our self-calibration algorithmand several experimental results are made available athttp://www.cs.columbia.edu/CAVE/. Here, due to lim-ited space, we will present just a couple of examples.
Figure 6 shows results obtained using a Canon Opturavideo camera. In this example, the gray scale output ofthe camera was used. Figure 6(a) shows 4 of the 5 im-ages of an outdoor scene obtained using five differentF-number settings. As can be seen, the low exposureimages are too dark in areas of low scene radiance andthe high exposure ones are saturated in bright scene re-gions. To reduce noise, temporal averaging usingt=100and spatial averaging usings=3x3 were applied. Next,automatic vignetting detection was applied to the 5 aver-aged images. Figure 6(b) shows the final selected pixels(in black) for one of the image pairs.
The solid line in Figure 6(d) is the response functioncomputed from the 5 scene images. The initial expo-sure ratio estimates were set to 0.5, 0.25, 0.5 and 0.5 andthe final computed ratios were 0.419, 0.292, 0.570 and0.512. These results were verified using a Macbeth cali-bration chart with patches of known relative reflectances(see Figure 6(c)). The chart calibration results are shownas dots which are in strong agreement with the computedresponse function. Figure 6(e) shows the radiance im-age computed using the 5 input images and the responsefunction. Since conventional printers and displays havedynamic ranges of 8 or less bits, we have applied his-togram equalization to the radiance image to bring outthe details within it. The small windows on the sidesof the radiance image show further details; histogramequalization was applied locally within each window.
Figure 7 shows two results obtained using a Nikon 2020film camera. In each case 5 images were captured ofwhich only 4 are shown in Figures 7(a) and 7(d). In thefirst experiment, Kodachrome slide film with ISO 200was used. These slides were taken using F-number = 8and approximate (manually selected) exposure times of1/30, 1/15, 1/8, 1/2 and 1 (seconds). In the second ex-periment, the pictures were taken with the same camerabut using F-number = 11 and ISO 100 slide film. The ex-posure settings were 1/500, 1/250, 1/125, 1/60 and 1/30.The developed slides were scanned using a Nikon LS-3510AF scanner that produces a 24 bit image (8 bits percolor channel).
The self-calibration algorithm was applied separately toeach color channel (R, G, B), using initial ratio estimatesof 0.5, 0.25, 0.5 and 0.5 in the first experiment and all

( a )
( b )
( c )
( e )
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1M
I
( d )
Figure 6: (a) Self-calibration results for gray scale video images taken using a Canon Optura camera. (b) Temporal averaging,spatial averaging and vignetting detection are used to locate pixels (shown in black) that produce robust measurements. (c) Theself-calibration results are verified using a uniformly lit Macbeth color chart with patches of known reflectances. (d) The computedresponse function (solid line) is in strong agreement with the chart calibration results (dots). (e) The computed radiance imageis histogram equalized to convey some of the details it includes. The image windows on the two sides of the radiance image arelocally histogram equalized to bring forth further details.
ratios set to 0.5 in the second. The three (R, G, B) com-puted response functions are shown in Figures 7(b) and7(e) . A radiance image was computed for each colorchannel and then the three images were scaled to pre-serve chromaticity, as described in section 6.4.. The finalradiance images shown in Figure 7(c) and 7(f) are his-togram equalized. As before, the small windows withinthe radiance images show further details brought out bylocal histogram equalization. Noteworthy are the detailsof the lamp and the chain on the wooden window in Fig-ure 7(c) and the clouds in the sky and the logs of woodinside the clay oven in Figure 7(f).
For the exploration of high dynamic range images, wehave developed a simple interactive visualization tool,referred to as the “Detail Brush.” It is a window of ad-justable size and magnification that can be slided aroundthe image while histogram equalization within the win-dow is performed in real time. This tool is also available
athttp://www.cs.columbia.edu/CAVE/.
References
[1] N. Asada, A. Amano, and M. Baba. Photometric Cali-bration of Zoom Lens Systems.Proc. of IEEE Interna-tional Conference on Pattern Recognition (ICPR), pages186–190, 1996.
[2] V. Brajovic and T. Kanade. A Sorting Image Sensor: AnExample of Massively Parallel Intensity-to-Time Pro-cessing for Low-Latency Computational Sensors.Proc.of IEEE Conference on Robotics and Automation, pages1638–1643, April 1996.
[3] P. Burt and R. J. Kolczynski. Enhanced Image CaptureThrough Fusion.Proc. of International Conference onComputer Vision (ICCV), pages 173–182, 1993.

( a )
( d ) ( f )
( c )
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1M
I
RG
B
( b )
( e )
0
0.2
0.4
0.6
0.8
1
0 0.2 0.4 0.6 0.8 1M
I
RG
B
Figure 7:Self-calibration results for color slides taken using a Nikon 2020 photographic camera. The slides are taken using filmwith ISO rating of 200 in (a) and 100 in (d). Response functions are computed for each color channel and are shown in (b) and (e).The radiance images in (c) and (f) are histogram equalized and the three small windows shown in each radiance image are locallyhistogram equalized. The details around the lamp and within the wooden window in (c) and the clouds in the sky and the objectswithin the clay oven in (f) illustrate the richness of visual information embedded in the computed radiance images.
[4] Y.-C. Chang and J. F. Reid. RGB Calibration for Anal-ysis in Machine Vision.IEEE Trans. on Pattern Analy-sis and Machine Intelligence, 5(10):1414–1422, October1996.
[5] P. Debevec and J. Malik. Recovering High DynamicRange Radiance Maps from Photographs.Proc. of ACMSIGGRAPH 1997, pages 369–378, 1997.
[6] G. Healey and R. Kondepudy. Radiometric CCD CameraCalibration and Noise Estimation.IEEE Trans. on Pat-tern Analysis and Machine Intelligence, 16(3):267–276,March 1994.
[7] K. Hirano, O. Sano, and J. Miyamichi. A Detail En-hancement Method by Merging Multi Exposure ShiftImages.IEICE, J81-D-II(9):2097–2103, 1998.
[8] B. K. P. Horn. Robot Vision. MIT Press, Cambridge,MA, 1986.
[9] T. James, editor.The Theory of the Photographic Pro-cess. Macmillan, New York, 1977.
[10] B. Madden. Extended Intensity Range Imaging. Techni-cal Report MS-CIS-93-96, Grasp Laboratory, Universityof Pennsylvania, 1996.
[11] S. Mann and R. Picard. Being ‘Undigital’ with Digi-tal Cameras: Extending Dynamic Range by CombiningDifferently Exposed Pictures.Proc. of IST’s 48th AnnualConference, pages 422–428, May 1995.
[12] S. L. Meyer.Data Analysis for Scientists and Engineers.John Wiley and Sons, 1992.
[13] C. A. Poynton. A Technical Introduction to DigitalVideo. John Wiley and Sons, 1996.
[14] A. J. P. Theuwissen.Solid State Imaging with Charge-Coupled Devices. Kluwer Academic Press, Boston,1995.