Embed Size (px)
Citation preview

Reactive Bipedal Walking Method for Torque Controlled Robot ∗
Yisoo Lee1 and Jaeheung Park1,2
Abstract— Reactivity to unexpected situations is one of themost important characteristics of walking for real world ap-plications. In this study, we introduce a reactive biped robotwalking method that reflects only the current state of the robot.Therefore, time plan and trajectory tracking control are notrequired for robot walking, and this enables reactive behaviorto unexpected contact or disturbance. The walking algorithmis realized through a whole-body control algorithm based onthe operational space control framework, that possesses thecapability to command the required force for tasks and alsoimplement compliant task behavior by adjusting correspondingtask gains. The performance of the proposed method is verifiedby experiments with a 12-DoF torque controlled biped robot.Robust walking is demonstrated when the foot is stopped by anunexpected obstacle or when the lateral motion is unexpectedlyblocked and released by a human.
I. INTRODUCTION
Humanoid robots have the potential to walk freely in hu-man environments. The use of the linear inverted pendulummodel (LIPM) [1] enabled the expression of the dynamicrelationship between the center of mass (CoM) and the centerof pressure (CoP), and thus, it approximates the behaviorof the CoM for stable bipedal walking. CoM trajectorygeneration methods were developed based on the LIPMfor robust walking in complex environments by allowinga robot to walk along planned footsteps [2], [3]. With thedevelopment of the capture point (CP) [4] and divergentcomponent of motion [5], footstep adjustment and footsteptiming change are accomplished by reflecting the state ofthe robot in real time, and thus more robust walking can beperformed [6].
Although the trajectory generation method enabled suc-cessful robot walking, the stability of the robot is signif-icantly affected by trajectory tracking performance of therobot. If the trajectory tracking performance is low, the robotis unable to perform foot stepping and CoM motion basedon the planned time and potentially lose its balance. Thisis because the trajectory generation method is based on the
* This work was supported by the National Research Foundationof Korea (NRF) grant funded by the Korea government (MSIP) (No.NRF-2015R1A2A1A10055798) and the Technology Innovation Program(10060081) funded by the Ministry of Trade, Industry and Energy (MI,Korea).
1The authors are with Department of Transdisciplinary Studies, GraduateSchool of Convergence Science and Technology, Seoul National University,145, Gwanggyo-ro, Yeoungtong-gu, Suwon-si, Gyeonggi-do, South Korea.{howcan11, park73}@snu.ac.kr
2The author is also with Advanced Institutes of Convergence Technology,864-1, Iui-dong, Yeongtong-gu, Suwon-si, Gyeonggi-do, South Korea. Heis a corresponding author.
assumption that the humanoid robots exhibit high trajectorytracking performance. The assumption is mostly suitable forhumanoid robots with accurate joint position controller [7],[8], [9], [10]. However, there are robots that exhibit relativelypoor position control performance, and it is difficult for theserobots to walk by relying on trajectory tracking.
In order to provide compliant behavior with respect tohumanoid robots for safe interaction between a robot andthe environment, several humanoid robots with joint torquecontroller were developed recently [11], [12], [13], [14].Compliant behavior is advantageous in coping with distur-bances from unexpected contacts. A torque solution for com-pliant control at the contact space and task space is obtainedby utilizing a whole-body control framework for floating-base robots [15], [16], [17], [18]. However, torque-controlledhumanoid robots exhibit relatively lower trajectory trackingperformance in task space when copared with position-controlled robots due to the elasticity of the joint and delaybetween a high-level controller and a low-level controller[19]. Furthermore, good trajectory tracking performancerequires high feedback gains, and this is contrary to thecompliant behavior pursued by torque-controlled humanoidrobots. Therefore, to use the advantages of the compliantbehavior, a method of walking in a manner reactive to thestate of the robot is more suitable.
Dynamic walking of the robot without high precision con-trol is already possible by utilizing the CP. The experimentresults of torque controlled biped robot M2V2 [20] andRoboray [21] indicate that walking is possible by reflectingonly the current state of robot. These methods generate theCoM motion based on the force control and preserve theadvantages of the robot’s compliance characteristics. Theyare relatively easy to implement since they are independentof time plan, and the desired tasks are determined accordingto the current state of the robot.
We developed a reactive walking method in the studyutilizing the concept of CP, similar to the walking methodsof M2V2 and Roboray. The previous methods assume thatthe robot’s foot always reaches its destination. However,the robot foot may not arrive to the desired position, notsatisfying the aforementiones assumption. This is becauseof some reasons including unrecognized ground slope andobstacles, low performance of a foot position controller, andjoint speed limit. The proposed method in the study involvesa reactive and time independent walking pattern that allowswalking without losing balance even when the foot does notreach the planned location, thereby enabling more robust

walking.The background theories of the LIPM and the CP are
introduced in Section II. Section. III proposes a new reactivewalking pattern. The control strategy of the robot for walkingwith the proposed reactive pattern is described in SectionIV. The experimental results obtained by using the 12-DoFbiped robot with whole-body control framework are shownin Section V. Finally, the discussion and conclusions arepresented in Section VI.
II. BACKGROUND
The LIPM is useful to predict the behavior of the CoMand the CoP of the biped robot. The LIPM assumes thatthe robot is a point mass and the height from the groundis constant. According to the LIPM that is expressed viaCartesian coordinates, the relationship between the CoM andthe CoP is described as follows [1].
xc =g
zc,0(xc−xp), (1)
where xc = [xc yc]T denotes the position of the CoM in
horizontal plane, xp = [xp yp]T denotes the position of
the CoP in horizontal plane, g denotes the gravitationalacceleration, and zc,0 denotes the height of the CoM thatis assumed as constant. As shown in (1), the direction of theCoM acceleration is opposite to the direction from the CoMto the CoP and the magnitude is proportional to the distancebetween the CoM and the CoP.
A CoP location that decelerates the moving CoM to stop ata specific location is derived from the LIPM. The xp wherethe xc will stop at the same position is termed as the CP(xCP = [xCP yCP]
T ). The CP equation derived from the LIPMis as follows [20].
xCP =
√zc,0
gxc +xc. (2)
The xCP is utilized in the proposed walking pattern becauseit is a time-independent variable.
Two characteristics are obtained from the LIPM. One isthat the CoM accelerates in the opposite direction from theCoM to the CoP, and the other is that when the CoP is locatedin the CP, the CoM will also stop at the CP. We use these twocharacteristics to construct a time independent and reactivewalking pattern in the next section.
III. TIME INDEPENDENT WALKING PATTERN
In this section, we introduce the concept of the timeindependent walking pattern based on the LIPM, and subse-quently propose a modified pattern that is practically utilizedfor an actual robot. We only explain the walking pattern inthe horizontal plane (x-y plane) because the LIPM doens notinclude a vertical height change.
(c)
(a) (b)
(d)
CoP ForceDirection
CoM
SupportingFoot
PlannedFootstep
SwingingFoot
CPVelocityDirection
SingleSupportDecelerationPhase(SSDP)
SingleSupportAccelerationPhase(SSAP)
ReferenceCP
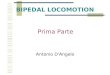
Fig. 1. Representation of CoM, CoP, and swinging foot pattern withLIPM for walking in horizontal plane. (a) Initial state of Single SupportDeceleration Phase (SSDP). The CoM decelerates and swinging foot movestoward the planned footstep. Green arrow describes required foot motionduring the phase. (b) Terminal state of SSDP. When the CoM velocitybecomes zero, terminate the SSDP even if the swing foot has not reached itsdestination. (c) Initial state of Single Support Acceleration Phase (SSAP). Anewly determined CoP accelerates the CoM to move towards the center ofthe landing foot. At the same time, the swinging foot lands on the ground.(d) Terminal state of SSAP. The SSAP terminates when the CP arrives atthe center of the landing foot. When the SSAP is terminated, exchange theroles of the two feet and restart the SSDP.
(a) (b) (c) (d)
Single Support Deceleration Phase Single Support Acceleration Phase
Swap roles of both feet.
Fig. 2. Representation of CoM, CoP, and swinging foot pattern with LIPMfor walking in Sagittal plane. The symbols are the same as in Fig. 1. Greenarrow describes required foot motion. The swing foot takes off and movesto the planned footstep during single support deceleration phase, and thenlands on the ground at the beginning of single support acceleration phase.
A. Concept of Walking Pattern with LIPM
Robot walking is possible if the moving CoM headingto the supporting foot is stopped before it goes beyondthe supporting foot polygon and then the stopped CoM isaccelerated towards the next supporting foot. Thus, a singlefootstep period during walking is composed of a singlesupport deceleration phase (SSDP), that decelerates the CoMto stop, and a single support acceleration phase (SSAP), thataccelerates the CoM to move toward the next supporting foot(Fig. 1 and Fig. 2). The SSDP and the SSAP are repeatedto perform walking.

Single Support Phase
Double Support Phase
Single Support Acceleration Phase
Single Support Deceleration Phase
Fig. 3. Repetitive cyclic of walking pattern in the order of single supportacceleration phase, double support phase, and single support decelerationphase.
1) Single support deceleration phase: The SSDP com-mences with an initial condition in which the CP is locatedat the center of the supporting foot. This initial conditionis the same as the condition for terminating the SSAP asshown in Fig. 1 (a) and (d). The CoM stops at the CPlocation if the CoP is placed at the center of the supportingfoot (Fig. 1 (b)). If the velocity of the CoM toward thesupporting foot direction is zero, then the SSDP is terminatedand the SSAP is initiated. It is assumed that the masslessswinging foot during the SSDP takes off from the groundand immediately moves to the planned footstep location. Ifthe swinging foot is unable to reach the destination due toan external disturbance, it stops within its reach.
2) Single support acceleration phase: The SSAP com-mences when the CoM velocity in the direction toward thesupporting foot is zero. The CoM is accelerated in anydirection by locating the CoP inside the supporting foot ina direction opposite to the direction of acceleration, becausethe position of the CoM is at the center of the supportingfoot. The CoP location set to accelerate the CoM remainsconstant during the SSAP as shown in Fig. 1 (c), and (d).During the SSAP, the CP is always calculated in real-time.The SSAP will be terminated (Fig. 1 (d)) if the CP reachesthe reference CP that is located at the center of the landingfoot, . The swinging foot lands on the ground at the positionreached at the end of the SSDP.
Stable walking is performed with a repetitive walkingpattern even when the swinging foot does not reach theplanned location because the CoM is accelerated toward thelanding foot and not the planned footstep.
B. Modified Walking Pattern for Real Robot
The behavior of the actual robot differs from that of theLIPM, which is a simplified model. Therefore, the walkingpattern in Section III-A is modified by considering thefollowing three practical issues caused by the differencebetween the real robot and the LIPM. The first issue that theCoP cannot immediately move from one foot to the other inthe real robot. The second issue is that the swinging foot isunable to move sufficiently fast to reach the desired positionat all times during the SSDP. The last issue is that the actualrobot is unable to perfectly stop at the CP even if the CoPis located at the CP.
Oxy
,x( r yr )
△p
x( f yf ),
r
x
(a)
O
xy △p
r
x( f yf ),
x( r yr )
x
,
(b)
Fig. 4. A figure for expressing the modified walking pattern during SSAP.The reference CP (xr) is located at r from the swinging foot, and thedirection of the CoM acceleration changes as the swinging foot moves.The CoP position to accelerate the CoM is located within 4Px. Symbols inthis figure follow the legend in Fig. 1. (a) When SSAP starts. (a) and (b)illustrate successive situations in order. The gray rectangle in (b) is depictedto compare how the CoM acceleration direction, the reference CP, and the4Px change after further movement of the swinging foot.
1) Double support phase: The first modification is theinsertion of the Double Support Phase (DSP) between theSSAP and SSDP as shown in Fig. 3. Therefore, repetitivecyclic pattern consists of SSAP, DSP, and SSDP sequences.We add a DSP to allow the CoP to move continuously fromthe present supporting foot to the next supporting foot. Whenthe CoP completes moving to the center of the supportingfoot, the DSP is terminated and the SSDP commences.
2) SSAP - Modification of CoM acceleration direction:Quite often, the swinging foot fails to arrive at the plannedfootstep location as previously mentioned when the SSDP isterminated. In order to extend the time that the swinging footmoves, we allow the swinging foot to move in the horizontalplane (x-y plane) not only in the SSDP and in the SSAP.The direction of CoM acceleration also changes accordingto the swinging foot motion during SSAP because the CoMis always accelerated toward the center of the swinging footin this phase. For control convenience, the x-direction ofthe frame O is defined to exhibit a direction toward thecenter of the swinging foot with respect to the center of thesupporting foot as shown in Fig. 4. With respect to the frameO, accelerating the CoM in the x-direction initiates the CoMmotion toward the swinging foot. However, as mentioned,the acceleration direction of the CoM also changes whenthe swinging foot moves. The change in the accelerationdirection causes a drift motion in the normal direction (y-direction in Fig. 4). The position and the velocity in the y-direction are controlled to be zero such that the CoM movestowards the center of the swinging foot without drifting inthe y-direction. Details related to tje control are given inSection. IV.
3) SSAP - Modification of reference CP: The behavior ofthe robot differs from that of the LIPM, and the DSP causesa delay in the transition of the CoP. Due to these reasons,

(a)
Oxy
△px
px,d
(b)
Fig. 5. The green rectangle is a swinging foot and the sky blue rectangleis supporting foot. (a) The situation when the robot loses balance. Whenthe CoM passes beyond the supporting foot, it is no longer able toobtain acceleration toward the supporting foot. Yellow arrow describes thedirection. (b) It is also possible that the single support acceleration phasemay start when the CoM lies behind the origin in the x-direction. In thiscase, the desired CoP (xp,d ) is located a constant distance (ζ ) behind theCoM position.
the CoM often stops after the expected location. It usuallystops after exceeding the expected location. The robot losesits balance if the CoM moves beyond the supporting footarea as shown in Fig. 5 (a), and this situation should beavoided. Therefore, it must stop before the CoM crosses thesupporting foot during the SSDP. Thus, the reference CP islocated at a distance r from the center of the landing foot tothe center of the supporting foot. In Fig. 4, xr and yr representthe reference CP. It is expressed as xr = x f − r and yr = 0with the frame O. The distance r is empirically determined.If the estimated CP is more accurate and the control responseof the robot is faster, then the robot walks even if r is low.At the next SSDP, the CoP is located at the center of thesupporting foot and not where the reference CP is locatedsuch that the CoM stops near the CoP.
4) SSAP - Determination of desired CoP: Based on theposition of the swing foot, the range of feasible CoP alsochanges as shown in Fig. 4. While using frame O in Fig. 4,in order to accelerate the CoM in the x-direction, the desiredCoP in the same direction (xp,d) should be located behindthe CoM. Additionally, the CoP should be placed inside ofthe supporting foot polygon. Therefore, the CoP in the x-direction must lie between the CoM within the foot boundary.The range of feasible boundary in x-direction is expressedas 4Px in Fig. 4 (b). The xp,d is the center of the foot whenthe CoM locates in front of the center of the foot. But whenthe CoM locates behind the center of the foot, xp,d shouldbe located behind the CoM. In that case, as shown in Fig.5 (b), the desired CoP is set as xp,d = xc−ζ , where ζ is anempirically determined value. Then, the CoM is acceleratedbecause the desired CoP, xp,d , is located behind the CoM byζ .
IV. CONTROL STRATEGY
The adoption of the whole-body control framework [15],[16], [17], [18] allows force control in the task space. Whenthe walking pattern provides desired acceleration of the CoM
(xc = [xc, yc, zc]T ) and the swing foot (xf = [x f , y f , z f ]
T ), thewhole-body controller calculates joint torque (Γ) for the taskspace control to generate the required acceleration (Fig. 6).
Each walking phase is described based on the frame Oin Fig. 7. Frame O in SSAP is equivalent to that in Fig. 4.The frame in DSP is the same as the frame at the end of theSSAP. At the SSDP, the origin is located at the center of thenew supporting foot, although, the direction matches that ofthe DSP. The origin of frame O that is located at the centerof the supporting foot, the x axis is parallel to the straightline connecting the centers of the two feet, and the z-axis isperpendicular to the ground. Thus, the direction of the x-axisis always toward the direction in which the CoM is requiredto accelerate or decelerate.
Frame O is used to control the x-direction of the CoM toproduce the desired acceleration. The x-direction acceleration(xc) is determined by the desired CoP in the same direction(xp,d). During the SSAP, xp,d is determined as describedin Section. III-B.4. During the DSP, the xp,d moves to thecenter of the next supporting foot from the final value ofxp,d at the SSAP. The straight line between the two points isexpressed by using a linear interpolation equation divided byan arbitrary interval (d px,d), and subsequently px,d increasesby the interval d px,d for each sampling time of the controllerwith xp,d = 0 during the SSDP. Acceleration xc generated byxp,d can be calculated with the LIPM equation (1) or canbe calculated using multi-body dynamics for more accuratecalculations. In the study, the method employing multi-bodydynamics in [22] that we previously developed is utilized.
The y and z-directions of the CoM are controlled tomaintain a constant position with PD-control scheme. Theaccelerations of each direction of the CoM is expressed asfollows.
yc = kp(yc,d− yc)− kvyc, (3)zc = kp(zc,d− zc)− kvzc, (4)
where yc and zc are the position of the CoM in each direction,yc,d and zc,d are the desired position of the CoM in eachdirection, kp is the proportional gain, and kv is the derivativegain. As previously mentioned, yc,d = 0 and zc,d = zc,0.
The swinging foot position is controlled during the SSDPand the SSAP to move towards the planned footstep withPD-control. Therefore, the linear acceleration of the foot isexpressed as follows.
x f = kp(x f ,d− x f )− kvx f , (5)y f = kp(y f ,d− y f )− kvy f , (6)z f = kp(z f ,d− z f )− kvz f . (7)
The desired height of the swinging foot (z f ,d) depends on thephase. During the SSAP, the desired height is zero becausethe foot must land on the ground. The desired height of theswinging foot during the SSDP is a constant value zh thatexceeds zero because the swing foot is taken off and shouldbe in the air for swinging motion. The desired foot location

Footstep Plannerxf,d yf,d( , )
Double SupportPhase
Single SupportDeceleration Phase
Single SupportAcceleration Phase
z = zf,d h
z = 0f,d
Robot Statexc yc zc( , , )xf yf zf( , , )xc yc zc( , , ). . .xf yf zf( , , )
. . .
z = z c,d c,0
y = 0 c,d
Desired AccelerationX = k (X - X)- k Xdp v.. .
yf,d( , , )zf,dxf,d
Multi-bodyDynamics
State Dependent Walking Patternxp,d xc
..
Whole-bodyController
yc zc.. ..
( , , )xc..
xf yf zf.. .. ..( , , )
ΓLinear Inverted Pendulum Model
xCP
Fig. 6. Overview of walking method. Variables written in red indicate the variables that are passed along the arrow. The phase of the walking patternis determined by the position and velocity of the CoM (xc,yc,zc, xc, yc, zc) and the position of the swing foot (x f ,y f ,z f ). The walking pattern calculatesthe y and z-direction desired CoM position (yc,d ,zc,d ), desired swing foot position (x f ,d ,y f ,d ,z f ,d ), and desired CoP in x-direction (xp,d ). To decide desiredacceleration of the CoM (xc, yc, zc) and the swing foot (x f , y f , z f ) to follow the desired values, the PD-controller and the multi-body dynamics are utilized.Finally, the whole-body controller provides joint torque (Γ) to control desired accelerations of the task space.
(a) (b) (c)
Fig. 7. Description of frame O for control. The green rectangle isa swinging foot. The sky blue rectangle is stationary because it is thesupporting foot that is in contact with the ground. Black dot on each footdescribes the location of center of the foot. (a) Single support accelerationphase. (b) Double support phase. (c) Single support deceleration phase.
(x f ,d and y f ,d) is updated at the same time when the SSDPcommences.
V. EXPERIMENTAL RESULTS
In order to verify the developed method, walking exper-iments are conducted with a 12-DoF torque controllablebiped robot DYROS RED [23]. Each joint of the robot iscomposed of an electric motor and a harmonic drive, andthe joint torque is controlled through the current controller.The height and the weight of the robot are 1.425 m and 89.63kg, respectively. The length and width of the foot are 0.3 mand 0.15 m, respectively.
For the experiments, tasks are controlled by utilizing anoperational space [24] based whole-body control framework[15]. The control framework provides a joint torque solutionthat produces operational space force or acceleration of a hu-manoid robot. In the double support phase, the linear motionof the CoM and the orientation of the torso correspond tothe control task. In the single support phase, the position andorientation of the swing foot are additionally controlled. ThePD-control scheme is also utilized to control the orientationsuch that it remains constant.
The balance controller [25] is additionally used since theproposed method does not consider the effect of the taskswith the exception of the x-direction CoM force on thebalance. The balance controller controls the contact momentin the null-space of the high-priority task. Therefore, tasks setas high-priority are always executed, and low-priority tasksare modified for balance control. In the experiment, all taskswith the exception of the trunk orientation are set as high-priority, and thus the balance is controlled by rotating thebody orientation. For all the experiments, kp is 100 and kvis 20 for all the tasks. These control gains were selected toallow the task to behave in a manner similar to a criticallydamped system, and a relatively low value was selectedfor compliant control. The desired footstep positions for theexperiments were arbitrarily determined. In order to expressthe results of walking experiments, we defined the frame Og,in which the origin is located at the CoM position projectedon the ground when the robot commences walking. The Xg-direction of Og is equal to the heading direction of the torsoat the beginning of the walking, while Zg is parallel to gravitydirection albeit opposite in direction.
A. Case 1. Walking experiment
As shown in Fig. 8, the robot performed a continuouswalking experiment. The CoM motion and footstep resultsduring walking are shown in Fig. 9. The desired step lengthis 0.1 m and the step width is ±0.24 m from the supportingfoot. To prevent landing from unexpected early contact withthe ground, the vertical landing position of the foot wasset to the position that is 0.005 m higher than that of thesupporting foot. The swinging foot height may be reducedto a negative value as shown in Fig. 9 (c) because theground is not perfectly flat. The position where the swingfoot arrives differs from the desired position by severalcentimeters, because the ground is slightly inclined and thecontrol feedback gains of the robot are relatively low (Fig.9). The robot walks even without accurate position control

)c()b()a(
)f()e()d(
Fig. 8. Snapshots during walking experiments. (a) to (f) show states duringcontinuous walking.
0 1 2 3 4 5 6 7 8 9
time (sec)
0
0.5
1
Xg (
m)
Left foot position
Right foot position
Desired foot position
Com Position
(a)
2 3 4 5 6 7 8 9
time (sec)
-0.2
0
0.2
Yg (
m)
Left foot
position
Right foot
position
Desired left
foot position
Desired right
foot position
(b)
0 1 2 3 4 5 6 7 8 9
time (sec)
0
0.02
0.04
Zg (
m)
Swinging Foot Position
Desired Foot Position
(c)
Fig. 9. Actual CoM motion, desired swing foot position and actual footposition during the walking experimental (Case 1). (a) Xg-direction. (b) Yg-direction. (c) Zg-direction.
of the feet.The phase changes according to the state are shown in Fig.
10 (a). The walk commences from the DSP since the CoMis stationary and the robot is in the DSP at the beginning.During the DSP, the desired CoP moves to the supportingfoot at approximately 1.3 s as shown in Fig 10 (b). Whenthe desired CoP arrives at the center of the supporting foot,the SSAP subsequently commences. The CP is calculatedduring the SSAP to determine when to terminate the SSAP.As shown in Fig. 10 (a), SSDP commences after the CP andreference CP intersect. Following this, the pattern is repeatedand the walking progresses.
0 1 2 3 4 5 6 7 8 9time (sec)
-1
0
1
Co
nta
ct S
tate
Double Support Phase
Single Support Acceleration Phase
Single Support Deceleration Phase
(a)
0 1 2 3 4 5 6 7 8 9time (sec)
-0.2
0
0.2
x (
m)
Capture Point Reference Capture Point
(b)
0 1 2 3 4 5 6 7 8 9
time (sec)
-0.2
0
0.2
x (
m)
desired CoP (px,d
)
(c)
Fig. 10. Results of the experiment Case 1. (a) Phase of walking pattern.Double foot support when phase value is 0 in the plot, right foot supportwhen phase value is 1 in the plot, and left foot support when value is -1 inthe plot. (b) Reference capture point and capture point (xCP) calculated bymeasured CoM state in x-direction. (c) Desired CoP (xp,d ) in x-direction.
The CP is significantly influenced by the accuracy of theestimated CoM. If the CP is inaccurate, it affects the stabilityof the developed walking method. Therefore, the value of rcorresponding to the safety margin of the CP is relatively ashigh as 0.09 m in the experiment. The same value of r as inCase 1 is used in the all experiments. If the value of r is high,the single step time is shortened and the time to perform theswing foot motion is potentially insufficient. If the value ofr is low, the CoM may move beyond the supporting footboundary and loses balance. In the experiment, the averagetime taken for single step was 0.68 s, and the step length was0.1 m. Thus, the robot moved at a velocity of approximately0.147 m/sec.
B. Case 2. Unexpected collision at the swing foot
As shown in Fig. 11, the experiment is conducted in thecase where the obstacle is present in front of the right foot ofthe robot. Walking is performed under the same conditions asthose in Case 1. Due to the compliant behavior of the torque-controlled robot, the foot is safely controlled when it collideswith the obstacle. However, the swing foot is unable to moveto the planned footstep. The experiment shows that walkingis continues even when the swinging foot is unable to moveto the target place due to obstacles on the ground. Therefore,it is advantageous to use both the compliant control schemeand the reactive walking method developed in the study.
As shown in Fig. 12 (a), the obstacle is located approx-imately 0.34 m ahead of the right foot. Changes in theposition of the feet and the desired position of the swing footare shown in Fig. 12 (b). At the first step of the right foot(1.25 ∼ 1.94 s), it collides with the obstacle and is unable

Obstacle
(a) (b) (c)
(d) (e) (f)
Fig. 11. Snapshots of walking experiment when the obstacle is in frontof the right foot of the robot (Case 2). (a) Obstacles on the ground areplaced in front of the right foot of the robot, and the robot starts walkingtoward the front (red arrow). (b) The robot swings its left foot first. (c) Inthe second step, the robot swings the right foot, but it does not reach thetarget point because it collides with the obstacle while moving. (d) In thethird step, the left foot moves. (e) There is still an obstacle right in front ofthe right foot, so the swing foot can not move forward. (f) In the fifth step,the left foot moves. It moves to the same target as the third step, since itmoves by the predetermined step length from the right foot.
-0.1 0 0.1 0.2 0.3 0.4X
g (m)
-0.2
-0.1
0
0.1
0.2
Yg (m
)
CoM positionSupporting foot position
(a)
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5
time (sec)
-0.2
0
0.2
0.4
Xg (
m)
Left foot position
Right foot position
Desired left foot position
Desired right foot position
(b)
Fig. 12. Experimental results of Case 2. (a) CoM and supporting footposition plotted on a horizontal plane. Obstacle is described by green square.Xg and Yg are describing direction of horizontal plane. (b) Motion of rightand left foot in Xg-direction.
to move to the destination. The second step motion of theright foot (2.77 ∼ 3.63 s) is also disturbed by the obstacle.Therefore, it only moves a short distance of approximately0.016 m. During the experiment, the desired position of eachstep of the swinging foot is controlled to move forward by0.1 m relative to the position of the supporting foot (Fig. 12(b)). The robot is unable to escape from its current location.
Fig. 13. Snapshots of the experiment Case 3. When the robot is walking,the person stops the movement of the robot from the side. Red arrow is thedirection of movement of the human hand.
2 4 6 8 10 12 14 16
time (sec)
-0.2
0
0.2
Yg (
m)
CoM position
Swinging Foot Position
(a)
2 4 6 8 10 12 14 16
time (sec)
-0.2
0
0.2
x (
m)
Capture Point Reference Capture Point
(b)
2 4 6 8 10 12 14 16time (sec)
-101
Co
nta
ct S
tate
Double Support Phase
Single Support Acceleration Phase
Single Support Deceleration Phase
(c)
Fig. 14. Results of the experiment Case 3. (a) Side motion of CoM andswinging foot during walking in place. Yg is side direction in lateral plane.The CoM is disturbed from person during 7.8 to 8 seconds and 14.6 to16 seconds as seen in Fig. 13. (b) Reference capture point and measuredcapture point in x-direction. (c) Phase of walking pattern. Double supportphase when phase value is 0 in the plot, right foot support when phase valueis 1 in the plot, and left foot support when value is -1 in the plot.
However, it does not fall and continues the walking motionin the same position due to the walking pattern.
C. Case 3. Disturbance at upper body in lateral plane
In the experiment, an external force is applied to theupper body of the walking robot to disturb movement. Asshown in Fig. 13, an individual blocks the upper body of therobot. The CoM is quasi-stationary between approximately7.8 and 9 s as shown in Fig. 14 (a) because the individualcompletely blocks the robot. Therefore, the CP did notexhibit a significant change during this time as shown inFig. 14 (b). At approximately 9 s, an individual releases thehand that blocks the robot. Following this, the CoM of the

robot accelerates again toward the swinging foot to continuewalking.
From approximately 14.6 to 16 s, an individual againblocks the robot with a low amount of force such that therobot moves slowly but does not stop. These experimentalresults indicate that the developed walking method reacts tounexpected contact or disturbance and adjusts its motion veryrobustly. If the robot is unable to move, it stops walking andsubsequently continues when it is possible and moves slowlyif a disturbance interferes with the movement. Therefore,reactive walking is performed.
VI. CONCLUSIONS
In the study, a reactive walking algorithm for bipedalrobots is proposed. The method uses only the current stateof the robot to compute the control force for tasks duringwalking. Therefore, it provides the robot with reactive be-havior with respect to an unexpected contact or disturbance.The main part of the proposed walking algorithm involvesthe creation of a control force on the COM of the robot. Theforce is always computed in the line from the supporting footposition to the current swing foot position. This enables thereactive behavior of the COM when the swing foot is unableto move forward due to an unexpected obstacle or force. Inaddition, the instantaneous capture point is used to determinewhen to accelerate, decelerate, and stop the COM. Thecompliant behavior of the COM for the disturbance at thetrunk of the robot was realized by this part of the algorithm.The experimental results demonstrated the reactive walkingbehavior of the robot especially when an unexpected contactor disturbance was applied to the robot. A future studywill additionally use a, force-torque sensor feedback controlfor more reactive and stable walking. This type of reactivewalking algorithm is further utilized for more complex andstable walking in combination with a higher level of planningfor the robot.
REFERENCES
[1] S. Kajita, F. Kanehiro, K. Kanoko, K. Yokoi, and H. Hirukawa,”The 3D Linear Inverted Pendulum Mode: A simple modeling for abiped walking pattern generation”, in Proc. 2001 IEEE/RSJ Int. Conf.Intelligent Robots and Systems, pp. 239-246.
[2] S. Kajita, F. Kanehiro, K. Kaneko, K. Fujiwara, K. Harada, K. Yokoi,and H. Hirukawa, ”Biped walking pattern generation by using previewcontrol of zero-moment point”, in Proc. 2003 IEEE Int. Conf. Roboticsand Automation, pp. 1620–1626.
[3] P.-B. Wieber, ”Trajectory free linear model predictive control for stablewalking in the presence of strong perturbations”, in Proc. 2006 IEEE-RAS Int. Conf. Humanoid Robots, pp. 137–142.
[4] J. Pratt, J. Carff, S. Drakunov, and A. Goswami, ”Capture point: Astep toward humanoid push recovery”, in Proc. 2006 IEEE-RAS Int.Conf. Humanoid Robots, pp. 200–207.
[5] T. Takenaka, T. Matsumoto, and T. Yoshiike, ”Real time motiongeneration and control for biped robot-1 st report: Walking gait patterngeneration”, in Proc. 2009 IEEE/RSJ Int. Conf. Intelligent Robots andSystems, pp. 1084-1091.
[6] J. Englsberger, C. Ott, and A. Albu-Schffer, ”Three-dimensionalbipedal walking control based on divergent component of motion”,IEEE Trans. Robotics, vol. 31, no. 2, pp. 355–368, 2015.
[7] J. Lim, I. Lee, I. Shim, H. Jung, H. M. Joe, H. Bae, O. Sim, J. Oh,T. Jung, S. Shin, et al., ”Robot System of DRC-HUBO+ and ControlStrategy of Team KAIST in DARPA Robotics Challenge Finals”, J.Field Robotics, vol. 34 no. 4, pp. 802–829, 2017.
[8] K. Kaneko, M. Morisawa, S. Kajita, S. I. Nakaoka, T. Sakaguchi, R.Cisneros and F. Kanehiro, ”Humanoid robot HRP-2KaiImprovementof HRP-2 towards disaster response tasks”, in Proc. 2015 IEEE-RASInt. Conf. Humanoid Robots, pp. 132–139.
[9] K. Kojima, T. Karasawa, T. Kozuki, E. Kuroiwa, S. Yukizaki, S.Iwaishi, T. Ishikawa, R. Koyama, S. Noda, F. Sugai, et al., ”Devel-opment of life-sized high-power humanoid robot jaxon for real-worlduse”, in Proc. 2015 IEEE-RAS Int. Conf. Humanoid Robots, pp. 838–843.
[10] S. Kim, M. Kim, J. Lee, S. Hwang, J. Chae, B. Park, H. Cho, J.Sim, J. Jung, H. Lee, et al., ”Team SNU’s Control Strategies forEnhancing a Robot’s Capability: Lessons from the 2015 DARPARobotics Challenge Finals”, J. Field Robotics, vol. 34 no. 2, pp. 359–380, 2017.
[11] J. Englsberger, A. Werner, C. Ott, B. Henze, M. A. Roa, G. Garofalo,R. Burgerm, A. Beyer, O. Eiberger, K. Schmid, et al., ”Overview of thetorque-controlled humanoid robot TORO”, in Proc. 2014 IEEE-RASInt. Conf. Humanoid Robots, pp. 916–923.
[12] A. Parmiggiani, M. Maggiali, L. Natale, F. Nori, A. Schmitz, N.Tsagarakis, J. S. Victor, F. Becchi, G. Sandini, and G. Metta, ”Thedesign of the iCub humanoid robot”, Int. J. Humanoid Robotics, vol.9, no. 4, 1250027, 2012.
[13] M. A. Hopkins, A. Leonessa, B. Y. Lattimer, and D. W. Hong,”Optimization-based whole-body control of a series elastic humanoidrobot”, Int. J. Humanoid Robotics, vol. 13, no. 1, 1550034, 2016.
[14] M. Johnson, B. Shrewsbury, S. Bertrand, T. Wu, D. Duran, M. Floyd,P. Abeles, D. Stephen, N. Mertins, A. Lesman, J. Carff, et al., ”TeamIHMC’s lessons learned from the DARPA robotics challenge trials”,J. Fied Robotics, vol. 32, no. 2, pp. 192-208, 2015.
[15] J. Park, and O. Khatib, ”Contact consistent control framework forhumanoid robots”, in Proc. 2006 IEEE Int. Conf. Robotics andAutomation, pp. 1963-1969.
[16] T. Koolen, S. Bertrand, G. Thomas, T. de Boer, T. Wu, J. Smith,J. Englsberger, and J. Pratt, ”Design of a momentum-based controlframework and application to the humanoid robot atlas”, Int. J.Humanoid Robotics, vol. 13, no. 1, 1650007, 2016.
[17] A. Herzog, N. Rotella, S. Mason, F. Grimminger, S. Schaal, and L.Righetti, ”Momentum control with hierarchical inverse dynamics on atorque-controlled humanoid”, Autonomous Robots, vol. 40 no. 3, pp.473–491, 2016.
[18] B. Henze, M. A. Roa, and C. Ott, ”Passivity-based whole-body balanc-ing for torque-controlled humanoid robots in multi-contact scenarios”,Int. J. Robotics Research, vol. 35, no. 12, pp. 1522–1543, 2016.
[19] J. Jung, S. Hwang, Y. Lee, J. Sim and J. Park, ”Analysis of PositionTracking in Torque Control of Humanoid Robots Considering JointElasticity and Time Delay”, in Proc. 2017 IEEE-RAS Int. Conf.Humanoid Robots, pp. 515–521.
[20] J. Pratt, T. Koolen, T. De Boer, J. Rebula, S. Cotton, J. Carff, M.Johnson, and P. Neuhaus, ”Capturability-based analysis and controlof legged locomotion, Part 2: Application to M2V2, a lower-bodyhumanoid”. Int. J. Robotics Research, vol. 31, no. 10, pp. 1117–1133,2012.
[21] K. Seo, J. Kim, and K. Roh, ”Towards natural bipedal walking:Virtual gravity compensation and capture point control”, in Proc. 2012IEEE/RSJ Int. Conf. Intelligent Robots and Systems, pp. 4019–4026.
[22] Y. Lee, ”Balancing and walking control of biped robots using contactwrench based on whole-body control framework,” Ph.D. thesis, Dept.Transdisciplinary, Seoul National Univ., Seoul, Korea, 2017.
[23] M. Schwartz, S. Hwang, Y. Lee, J. Won, S. Kim, and J. Park,”Aesthetic design and development of humanoid legged robot”, inProc. 2014 IEEE-RAS Int. Conf. Humanoid Robots, pp. 13–19.
[24] O. Khatib, ”A unified approach for motion and force control of robotmanipulators: The operational space formulation”, IEEE J. Roboticsand Automation, vol. 3 no. 1, pp. 43–53, 1987.
[25] Y. Lee, S. Hwang, and J. Park., ”Balancing of humanoid robot usingcontact force/moment control by task-oriented whole body controlframework”, Autonomous Robots, vol. 40, no.3, pp. 457–472, 2016.