Embed Size (px)
Citation preview
Recent developments in MISI Introduction
Minimally invasive surgery (MIS) is becoming more and
more common in hospitals. These procedures are performed
through tiny incisions instead of one large opening. Because
the incisions are small, patients tend to have quicker recovery
time and less discomfort than with conventional surgery — all
with the same benefits.
However, with this method, a surgical operation is
performed by the help of: a small endoscopic camera; several
long, thin, rigid instruments.
II Bionic Design of Microjoint for Minimally Invasive
Surgical Instrument
A microjoint for minimally invasive surgery based on bionic
design like an insect leg has been developed. This microjoint is
comprised of two materials which have different stiffness
characteristics. First of all, the microjoint was designed based
on analythical approach and determined the using of SU-8 and
PDMS as materials of designed joint. The advantages of
proposed microjoint are as follows: (1) Small (less than 2 mm),
(2) Flexibility, (3) High I/O ratio, and (4) Biocompatibility.
Through the basic experiment, it has been confirmed that the
developed joint has a potential for application of endoscopic
surgery such as Endoscopic Sub-mucosal Dissection (ESD).
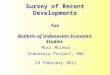
Proposed joint is small (2 mm), and it can insert to the
channel of oral endoscope to assist of the surgical procedure, as
shown in Fig.1 followed.
Fig.1 Concept of bionic design and application to the
medical device
Fig.2 below shows the fabrication process flow, SU-8 and
PDMS for proposed joint. This exoskeletal structure of
microjoint is fabricated by stacking the several layers, which
are made by photolithography. The fabrication process is after
the design of the dimensions and the simulation or calculation
for enough bend and stiffness.
Fig.2 Process flow of the joint

III A Piezoresistive Based Tactile Sensor
A novel tactile sensor is proposed for use in minimally
invasive surgery to provide surgeons with tactile information.
The sensing element of the sensor relies on a piezoresistive
material. The proposed sensor measures contact force as well as
the relative hardness of soft contact objects. Experimental test
results confirm the ability of the sensor to distinguish between
two different elastomeric materials. Such materials resemble
two different biological tissues.
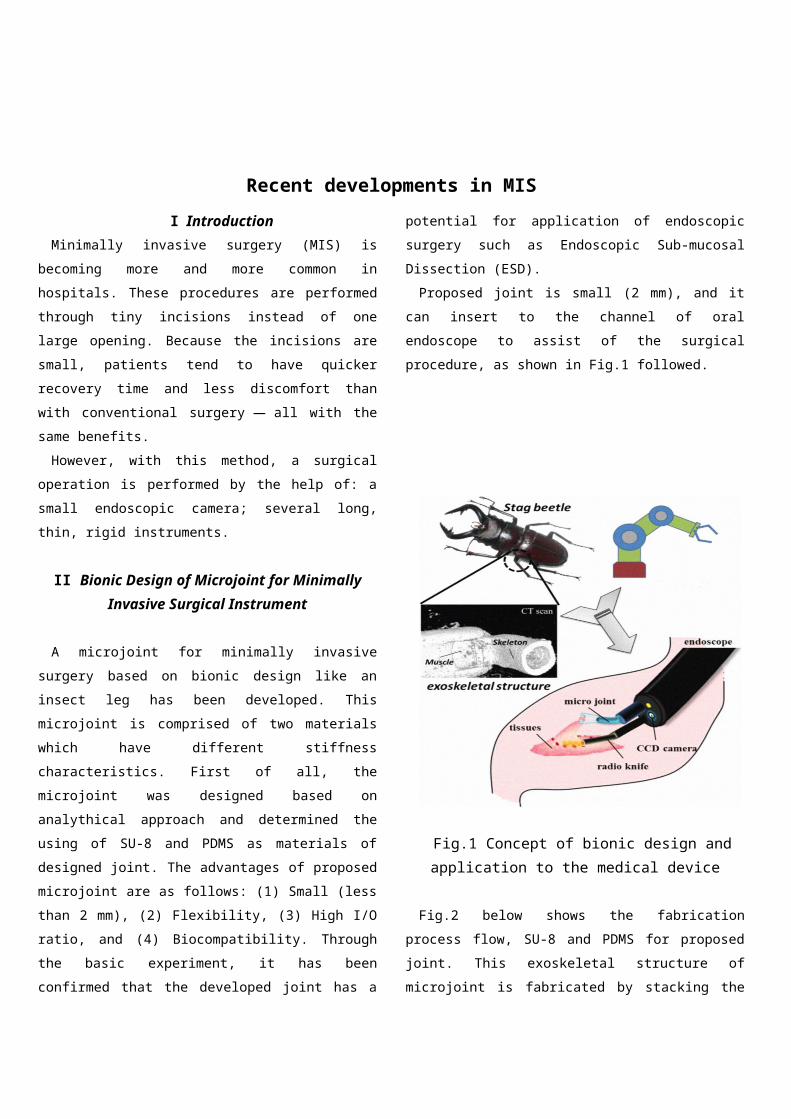
Fig.3 Sensor Design
As illustrated in Fig.3, the proposed sensor consists of an
elastic beam laid on two supports located on both right and left
sides of the sensor.
In fact, piezoresistive films are selected as the sensing
elements of the sensor because of: (1) their fast response to
static and dynamic loads, (2) their ability to be micro–
fabricated, and (3) their low sensitivity to external noise.
The three piezoresistive films that are placed in the bottom of
the sensor structure measure the total contact force applied to
the top of the sensor. At the same time, the fourth film, which is
placed between the sensor beam and the filler material,
measures the deflection of the beam, caused by contacting a soft
object. The more the deformation of the contact object, the more
the deflection of the beam and the more the output of the middle
top piezoresistive film.
The range and the resolution of the sensor can be fine-tuned
by changing the design parameters of the sensor.
As a result, the sensor would be miniaturized enough for
integration into the small space available at the tips of MIS
graspers.
IV A PZT Bimorph Actuator
By optimizing the thickness of the piezoceramic layers, and
by allowing the voltage applied to each segment to vary,
dramatic improvements in deflection and force are obtained
when compared to a standard straight bimorph actuator. The
motivation for this design is the need in the field of minimally
invasive surgery for improved grasping tools, where a pair of
optimized bimorph actuators can be used as a simple grasping
device.
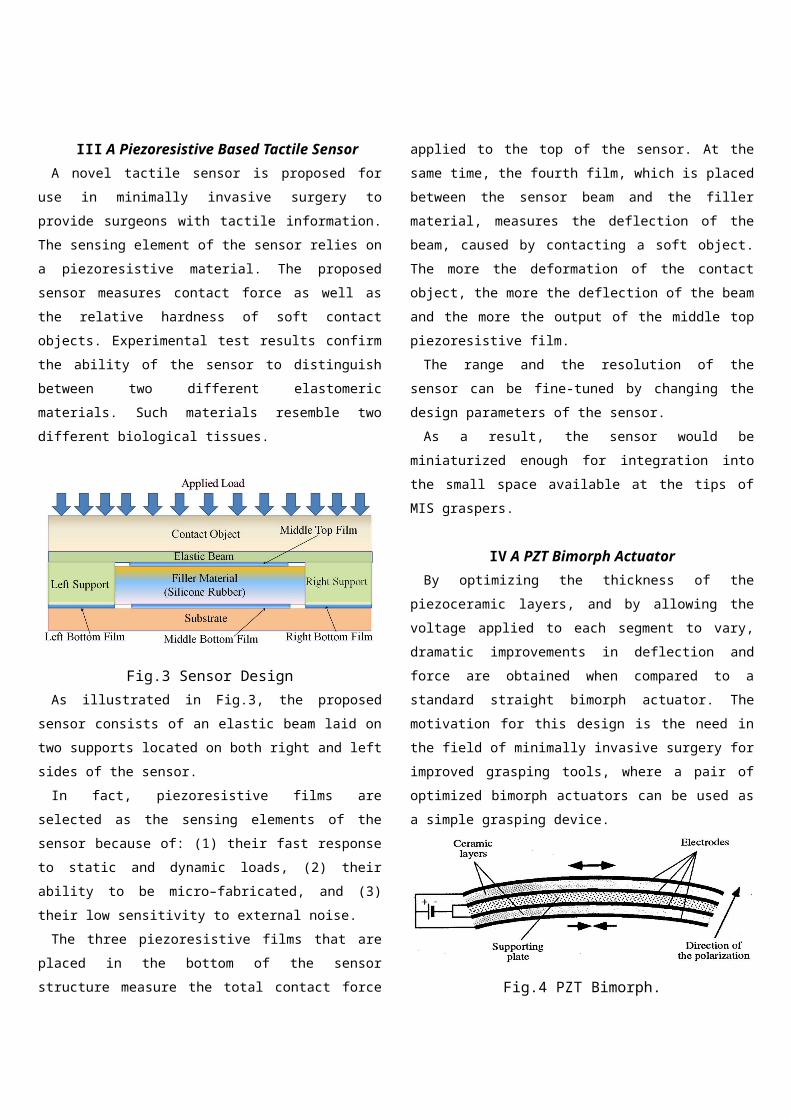
Fig.4 PZT Bimorph.
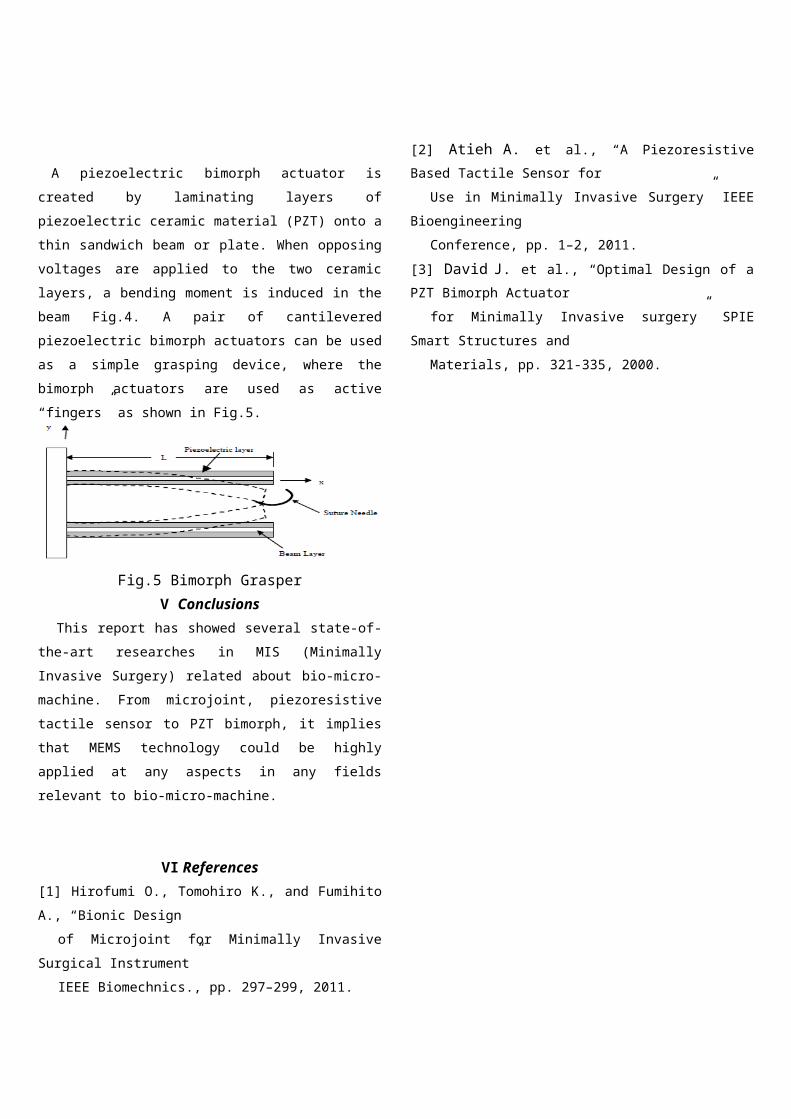
A piezoelectric bimorph actuator is created by laminating
layers of piezoelectric ceramic material (PZT) onto a thin
sandwich beam or plate. When opposing voltages are applied to
the two ceramic layers, a bending moment is induced in the
beam Fig.4. A pair of cantilevered piezoelectric bimorph
actuators can be used as a simple grasping device, where the
bimorph actuators are used as active “fingers” as shown in
Fig.5.
Fig.5 Bimorph Grasper
V Conclusions
This report has showed several state-of-the-art researches in
MIS (Minimally Invasive Surgery) related about bio-micro-
machine. From microjoint, piezoresistive tactile sensor to PZT
bimorph, it implies that MEMS technology could be highly
applied at any aspects in any fields relevant to bio-micro-
machine.
VI References
[1] Hirofumi O., Tomohiro K., and Fumihito A., “Bionic Design
of Microjoint for Minimally Invasive Surgical Instrument”
IEEE Biomechnics., pp. 297–299, 2011.
[2] Atieh A. et al., “A Piezoresistive Based Tactile Sensor for
Use in Minimally Invasive Surgery” IEEE Bioengineering
Conference, pp. 1–2, 2011.
[3] David J. et al., “Optimal Design of a PZT Bimorph Actuator
for Minimally Invasive surgery” SPIE Smart Structures and
Materials, pp. 321-335, 2000.