Embed Size (px)
Citation preview
1
Jiraphon Srisertpol,Ph.D
1
The Art of Control Systems
School of Mechanical Engineering
2
Prescribed text :Katsushiko OCATA, Modern Control Engineering, Fifth Edition, Prentice Hall, 2008
2
Recommended reading :รศ.นท.ดร.สราวุฒิ สุจิตจร, การควบคุมอัตโนมัติ , ซีเอด็ พ.ศ.2546Norman S.Nise, Control Systems Engineering, Fifth Edition,Wiley,2008Richard C. DORF and Robert H. BISHOP, Modern Control Systems, Ninth Edition, Prentice Hall,2001Gopal M, Control Systems, Third Edition, TaTa McGraw-Hill, 2008
3
425308 Automatic Control Systems 4(4-0-8)
3
Course Description: ระบบเปด,ระบบปด, แบบจําลองทางคณิตศาสตรของระบบ(Mathematical Model of System), พฤติกรรมทางพลวัตรของระบบ , เสถียรภาพของระบบ(Stability of System), การออกแบบและวิเคราะหระบบควบคุมอัตโนมัติดวยวิธีโลกัสของราก (Root Locus Method), การออกแบบและวิเคราะหระบบควบคุมอัตโนมัติดวยวิธีการตอบสนองเชิงความถี่ (Frequency-response Method), การออกแบบและวิเคราะหระบบควบคุมอัตโนมัติทางอุตสาหกรรม
4
Grading Criteria:
4
• A 80-100• B+ 75-79• B 70-74• C+ 60-69• C 50-59• D+ 45-49• D 40-44• F 0-39 First Exam: 40 %
Second Exam: 50 %Home work, Quiz , Check: 15 %
5
ประวัติพัฒนาการดานระบบควบคุม(History of Control System)
1728 – Jame Watt
5Flyball governor
6
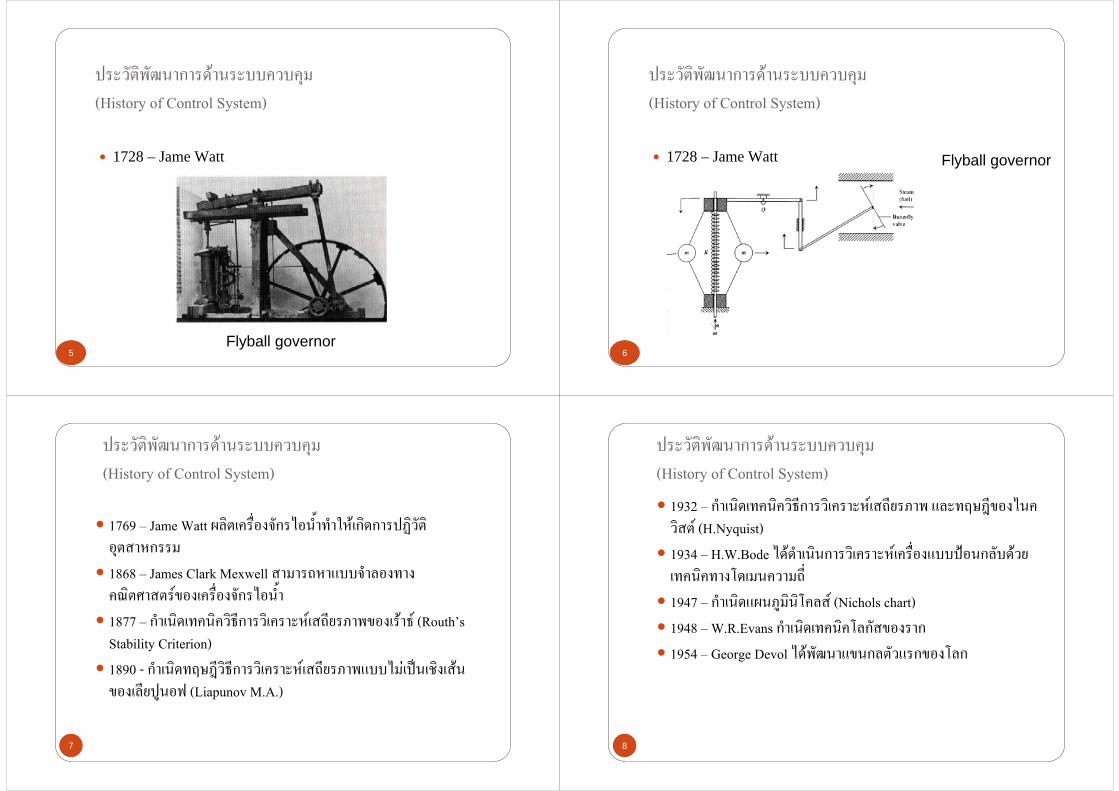
ประวัติพัฒนาการดานระบบควบคุม(History of Control System)
1728 – Jame Watt
6
Flyball governor
7
ประวัติพัฒนาการดานระบบควบคุม(History of Control System)
7
1769 – Jame Watt ผลิตเครื่องจักรไอน้ําทําใหเกิดการปฏิวัติอุตสาหกรรม1868 – James Clark Mexwell สามารถหาแบบจําลองทางคณิตศาสตรของเครื่องจักรไอน้ํา1877 – กําเนิดเทคนิควิธีการวิเคราะหเสถียรภาพของเราธ (Routh’s Stability Criterion)1890 - กําเนิดทฤษฎีวิธีการวิเคราะหเสถียรภาพแบบไมเปนเชิงเสนของเลียปูนอฟ (Liapunov M.A.)
8
ประวัติพัฒนาการดานระบบควบคุม(History of Control System)
8
1932 – กําเนิดเทคนิควิธีการวิเคราะหเสถียรภาพ และทฤษฎีของไนควิสต (H.Nyquist)1934 – H.W.Bode ไดดําเนินการวิเคราะหเครื่องแบบปอนกลับดวยเทคนิคทางโดเมนความถี่1947 – กําเนิดแผนภูมินิโคลส (Nichols chart)1948 – W.R.Evans กําเนิดเทคนิคโลกัสของราก1954 – George Devol ไดพัฒนาแขนกลตัวแรกของโลก
9
ประวัติพัฒนาการดานระบบควบคุม(History of Control System)
9
1956 –1969 Optimal control, Dynamic program, Optimization system, Fuzzy logic1970 – 1979 State space model, Adaptive control1980 – 1989 Robustness control, AI1990 – 1999 Robot development and application
10
Introduction to Automatic Control System
10
วิศวกรมีความพยายามที่จะเขาใจและควบคุมการทํางานของอุปกรณตางๆ รอบตัวอยูเสมอ เพื่อสามารถนํามันมาใชประโยชนใหกับมนุษยชาติได โดยทั่วไปแลวระบบ (system) ในธรรมชาติเปนสิ่งที่เราไมเขาใจการทํางานของมันอยางถองแท เหมือนกับเปนกลองดําที่เราทราบแตเพียงวาหากมีขอมูลการกระตุนหรือรบกวนระบบหรือเราอาจเรียกวา อินพุท (input) และเราทราบวาระบบจะมีการตอบสนอง หรือใหผลลัพธออกมาซึ่งเราเรียกวา เอาทพุท (output)
ดังนั้นในหลายกรณีแทนที่วิศวกรจะพยายามที่จะทําความเขาใจกับระบบอยางแทจริง วิศวกรจะเลี่ยงไปทําความเขาใจความสัมพันธระหวางอินพุทและเอาทพุทของระบบมากกวา เพื่อที่จะหาวิธีการกําหนดอินพุทใหกับระบบเพื่อที่จะใหระบบมีเอาทพุทตามที่ตองการได
11
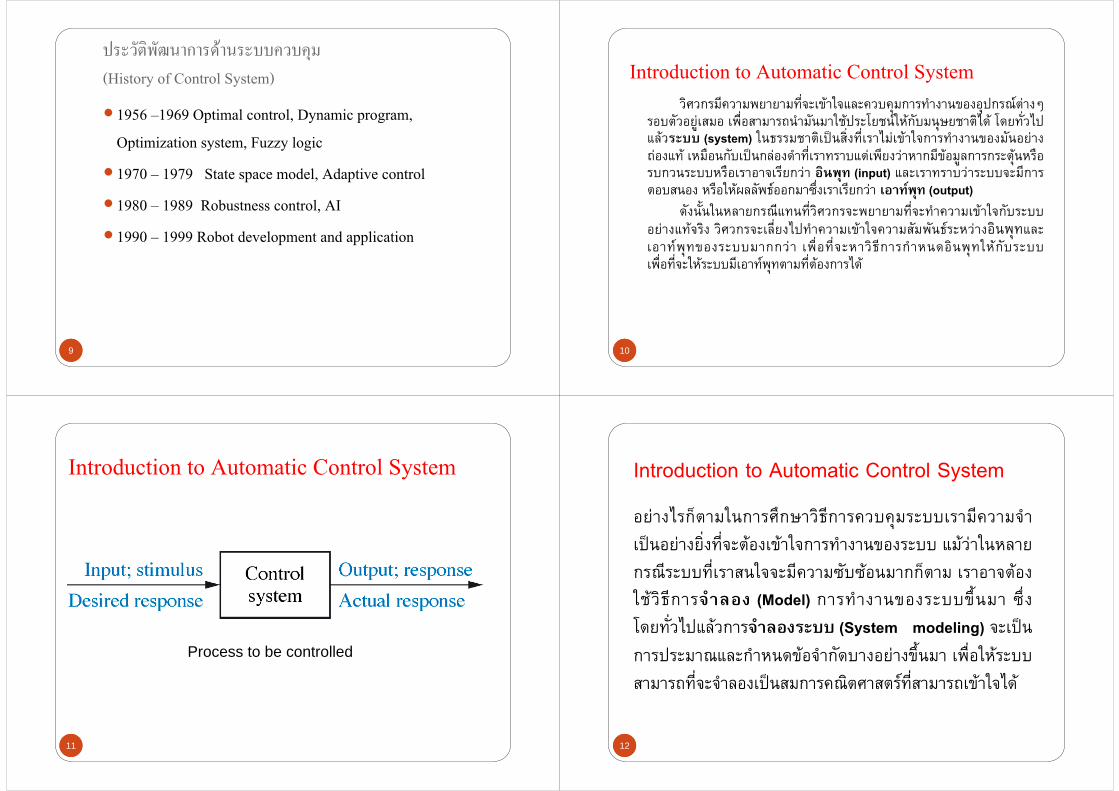
Introduction to Automatic Control System
11
Process to be controlled
12
Introduction to Automatic Control System
12
อยางไรก็ตามในการศึกษาวิธีการควบคุมระบบเรามีความจําเปนอยางยิ่งที่จะตองเขาใจการทํางานของระบบ แมวาในหลายกรณีระบบที่เราสนใจจะมีความซับซอนมากก็ตาม เราอาจตองใชวิธีการจําลอง (Model) การทํางานของระบบขึ้นมา ซึ่งโดยทั่วไปแลวการจําลองระบบ (System modeling) จะเปนการประมาณและกําหนดขอจํากัดบางอยางขึ้นมา เพื่อใหระบบสามารถที่จะจําลองเปนสมการคณิตศาสตรที่สามารถเขาใจได
13
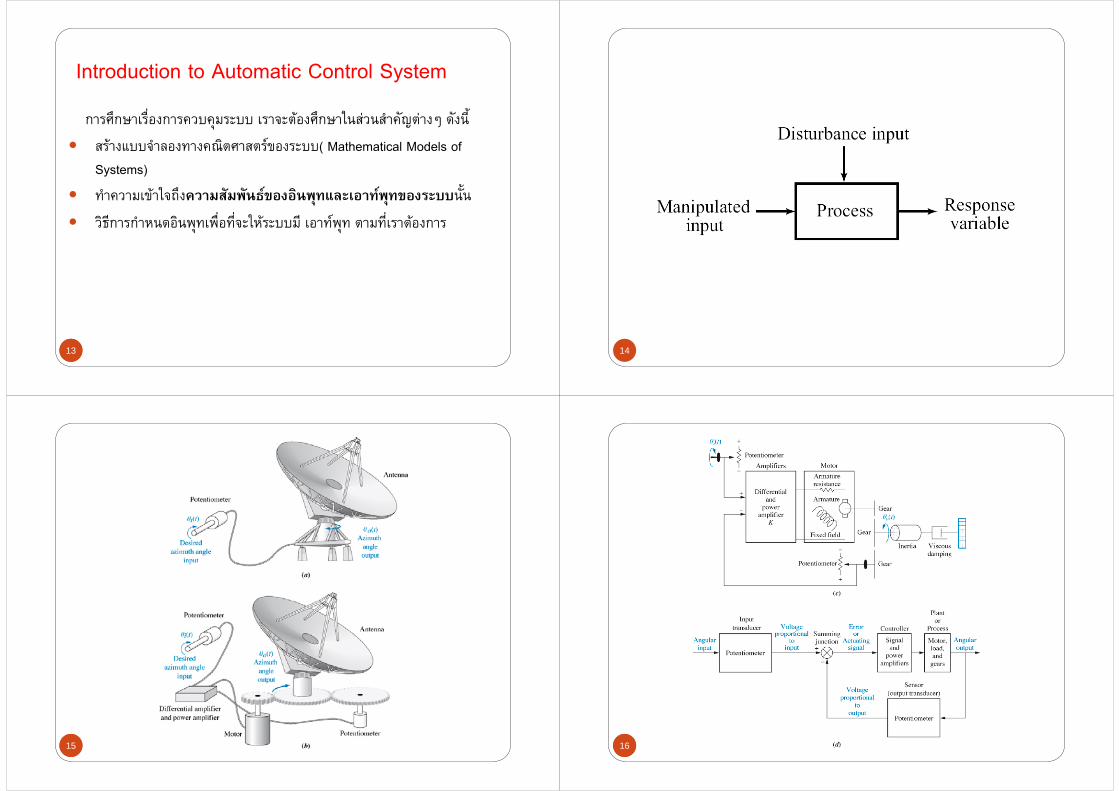
Introduction to Automatic Control System
13
การศึกษาเรื่องการควบคุมระบบ เราจะตองศึกษาในสวนสําคัญตางๆ ดังนี้สรางแบบจําลองทางคณิตศาสตรของระบบ( Mathematical Models of Systems)ทําความเขาใจถึงความสัมพนัธของอินพทุและเอาทพทุของระบบนั้นวิธีการกําหนดอินพุทเพื่อทีจ่ะใหระบบมี เอาทพทุ ตามที่เราตองการ
14
1515 1616
17
ระบบควบคุม (Control System)
17
ระบบควบคุม คือ สวนประกอบหลายๆ สวนตอเชื่อมกันขึ้นเปนระบบที่จะใหการตอบสนองตามที่เราตองการ พื้นฐานของการวิเคราะหระบบจะมีพื้นฐานจากทฤษฎีระบบเชิงเสน ซึ่งจะแสดงความสัมพันธของอินพุทและเอาทพุทหรือการตอบสนอง (response)
18
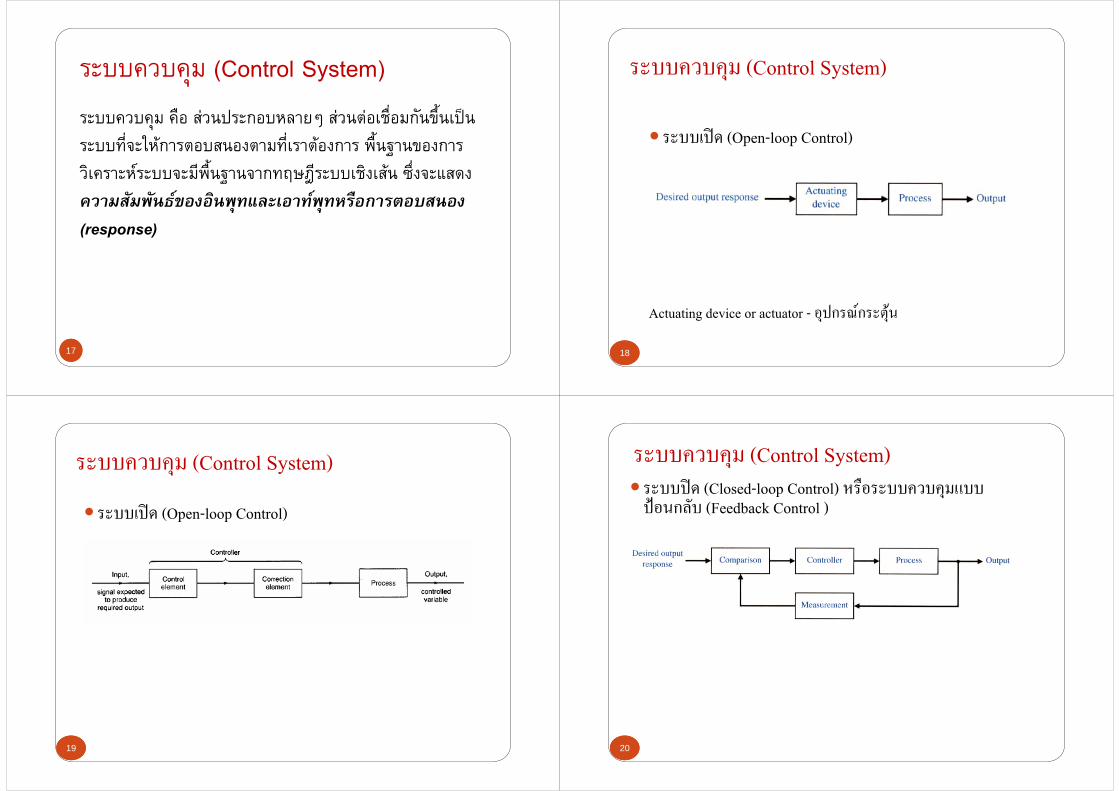
ระบบควบคุม (Control System)
ระบบเปด (Open-loop Control)
18
Actuating device or actuator - อุปกรณกระตุน
19
ระบบควบคุม (Control System)ระบบเปด (Open-loop Control)
19 20
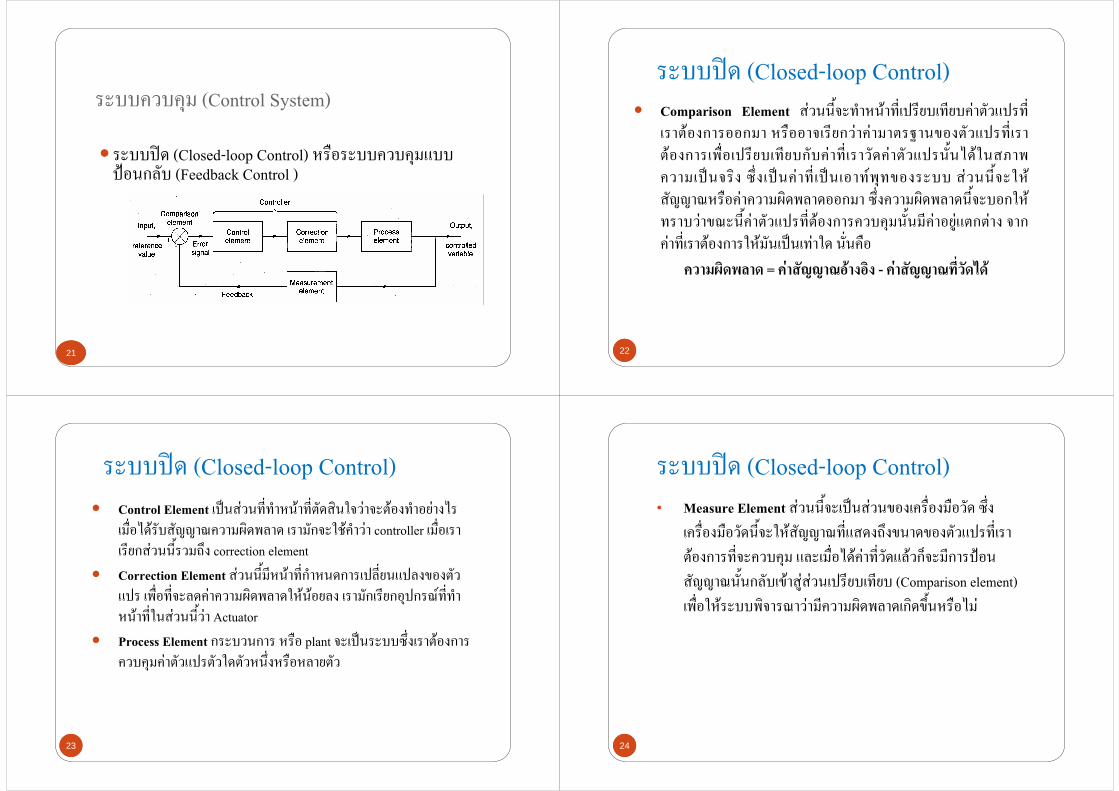
ระบบควบคุม (Control System)ระบบปด (Closed-loop Control) หรือระบบควบคุมแบบปอนกลับ (Feedback Control )
20
21
ระบบควบคุม (Control System)
ระบบปด (Closed-loop Control) หรือระบบควบคุมแบบปอนกลับ (Feedback Control )
21 22
ระบบปด (Closed-loop Control)
22
Comparison Element สวนนี้จะทําหนาที่เปรียบเทียบคาตัวแปรที่เราตองการออกมา หรืออาจเรียกวาคามาตรฐานของตัวแปรที่เราตองการเพื่อเปรียบเทียบกับคาที่เราวัดคาตัวแปรนั้นไดในสภาพความเปนจริง ซึ่งเปนคาที่ เปนเอาทพุทของระบบ สวนนี้จะใหสัญญาณหรือคาความผิดพลาดออกมา ซึ่งความผิดพลาดนี้จะบอกใหทราบวาขณะนี้คาตัวแปรที่ตองการควบคุมนั้นมีคาอยูแตกตาง จากคาที่เราตองการใหมันเปนเทาใด นั่นคือ
ความผิดพลาด = คาสัญญาณอางอิง - คาสัญญาณที่วัดได
23
ระบบปด (Closed-loop Control)
23
Control Element เปนสวนที่ทําหนาที่ตัดสินใจวาจะตองทําอยางไร เมื่อไดรับสัญญาณความผิดพลาด เรามักจะใชคําวา controller เมื่อเราเรยีกสวนนี้รวมถึง correction elementCorrection Element สวนนีม้ีหนาที่กําหนดการเปลี่ยนแปลงของตัวแปร เพือ่ที่จะลดคาความผิดพลาดใหนอยลง เรามักเรียกอุปกรณทีท่ําหนาทีใ่นสวนนี้วา ActuatorProcess Element กระบวนการ หรือ plant จะเปนระบบซึ่งเราตองการควบคุมคาตัวแปรตัวใดตัวหนึ่งหรือหลายตวั
24
ระบบปด (Closed-loop Control)
24
• Measure Element สวนนี้จะเปนสวนของเครื่องมือวัด ซึ่งเครื่องมือวัดนี้จะใหสัญญาณที่แสดงถึงขนาดของตัวแปรที่เราตองการที่จะควบคุม และเมื่อไดคาที่วัดแลวก็จะมีการปอนสัญญาณนั้นกลับเขาสูสวนเปรียบเทียบ (Comparison element) เพื่อใหระบบพิจารณาวามีความผิดพลาดเกดิขึ้นหรือไม
25
ระบบควบคุม (Control System)
25
SISO (Single Input Single Output) - ระบบทีม่ีจํานวนอินพทุและเอาทพุทเพยีงอยางละหนึ่งMultivariable Control System- ระบบควบคุมหลายตัวแปร
26
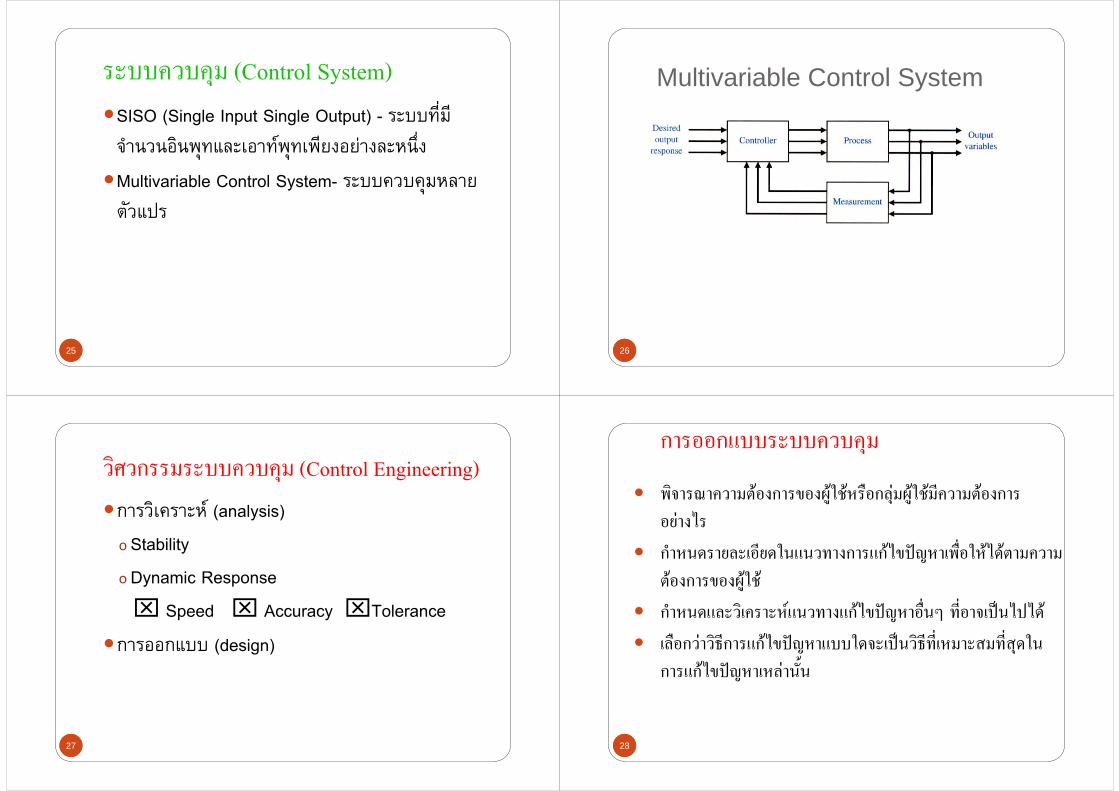
Multivariable Control System
26
27
วิศวกรรมระบบควบคุม (Control Engineering)
27
การวเิคราะห (analysis)o Stability o Dynamic Response⌧ Speed ⌧ Accuracy ⌧Tolerance
การออกแบบ (design)
28
การออกแบบระบบควบคุม
28
พิจารณาความตองการของผูใชหรือกลุมผูใชมีความตองการอยางไรกําหนดรายละเอียดในแนวทางการแกไขปญหาเพื่อใหไดตามความตองการของผูใชกําหนดและวิเคราะหแนวทางแกไขปญหาอืน่ๆ ที่อาจเปนไปไดเลือกวาวิธีการแกไขปญหาแบบใดจะเปนวิธีที่เหมาะสมที่สุดในการแกไขปญหาเหลานั้น
29
ขอควรคํานึงถึงในการออกแบบระบบควบคุม
29
ความซับซอนในการออกแบบ (Complexity of Design)Trade-Offความเสี่ยง (Risk)ความแตกตาง (Design Gab)
30
Examples of control systems
30
Turntable speed control (Open-loop control)
31
Examples of control systems
31
Turntable speed control (Closed-loop control)
32
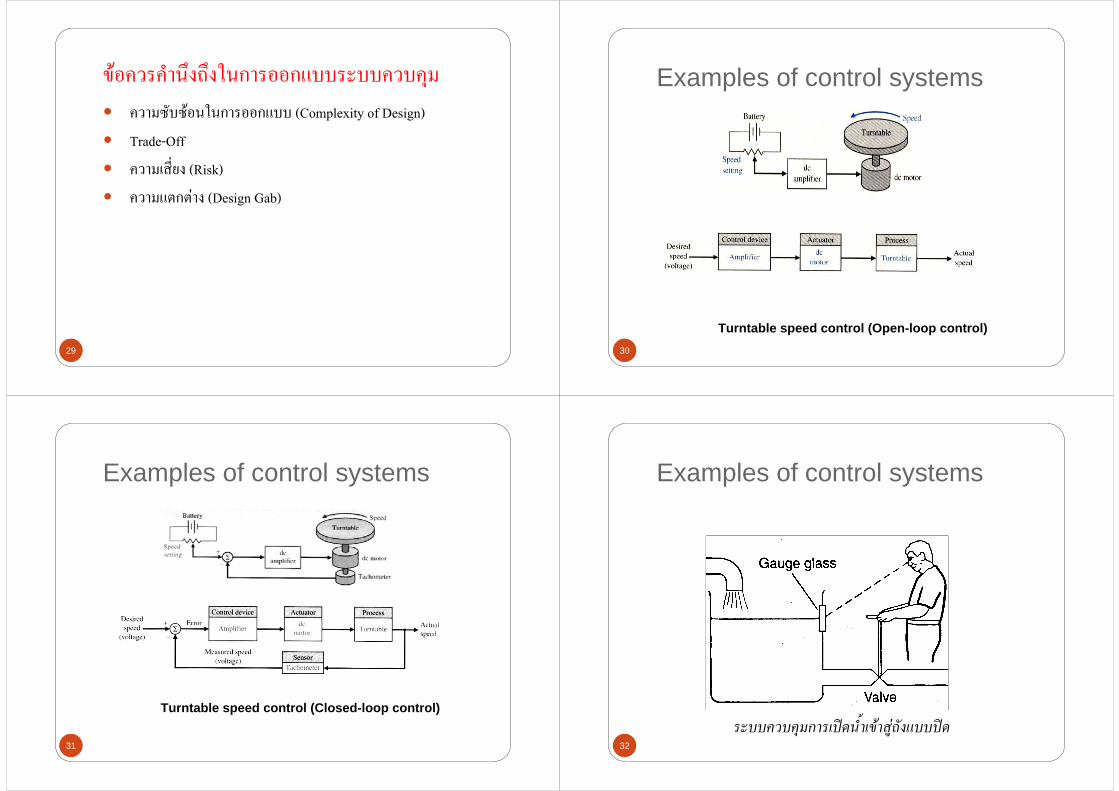
Examples of control systems
32
ระบบควบคุมการเปดน้ําเขาสูถังแบบปด
33
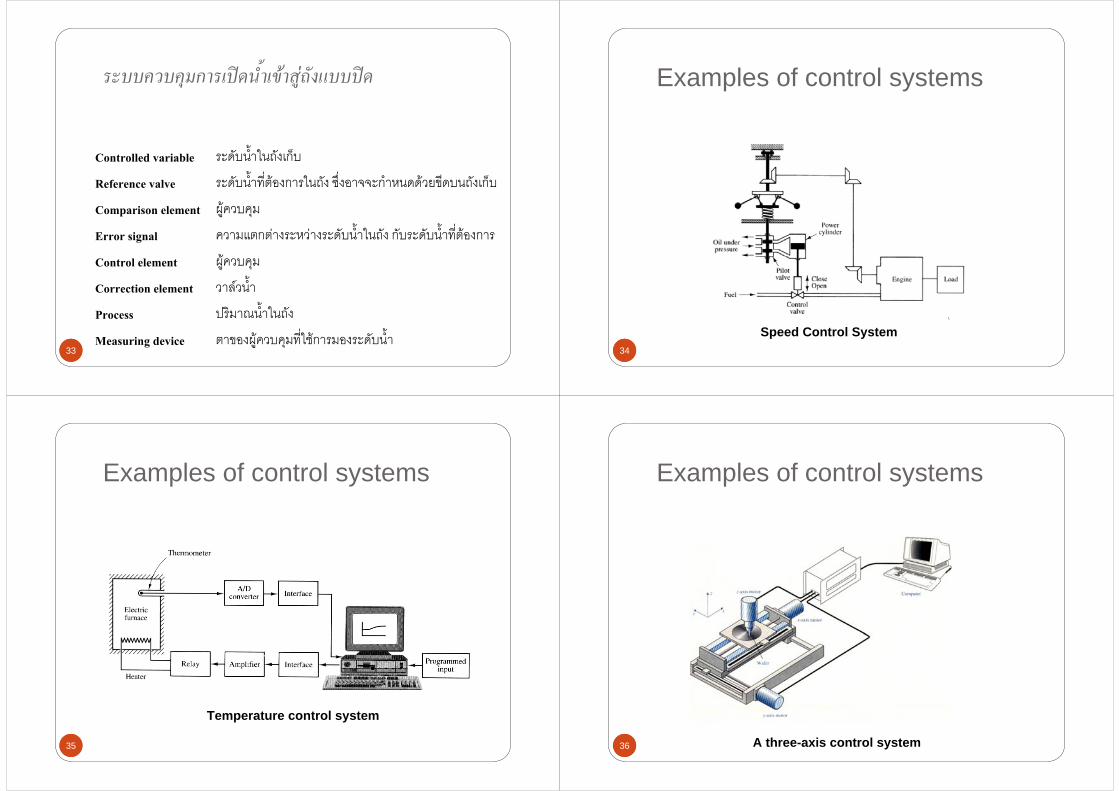
ระบบควบคุมการเปดน้าํเขาสูถังแบบปด
33
Controlled variable ระดบัน้าํในถังเก็บReference valve ระดบัน้าํที่ตองการในถงั ซึ่งอาจจะกําหนดดวยขดีบนถังเก็บComparison element ผูควบคมุError signal ความแตกตางระหวางระดับน้ําในถัง กับระดับน้ําที่ตองการControl element ผูควบคมุCorrection element วาลวน้ําProcess ปรมิาณน้ําในถังMeasuring device ตาของผูควบคมุทีใ่ชการมองระดับน้ํา
34
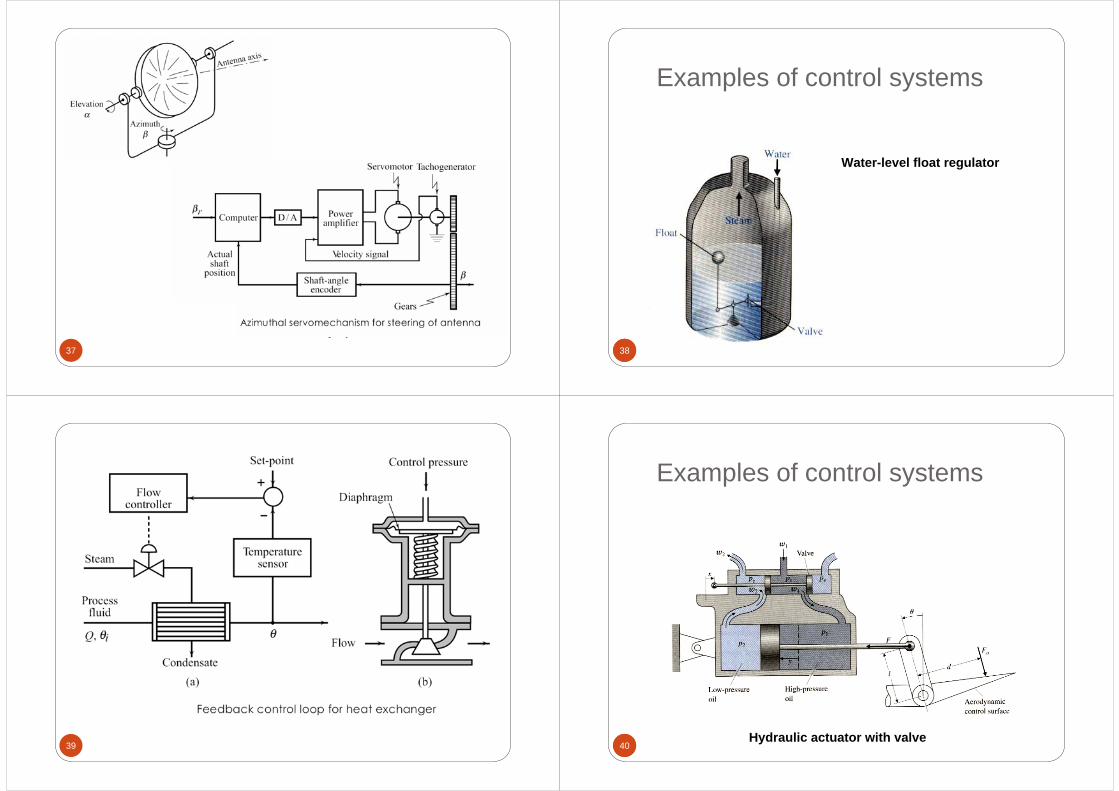
Examples of control systems
34
Speed Control System
35
Examples of control systems
35
Temperature control system
36
Examples of control systems
36 A three-axis control system
37 38
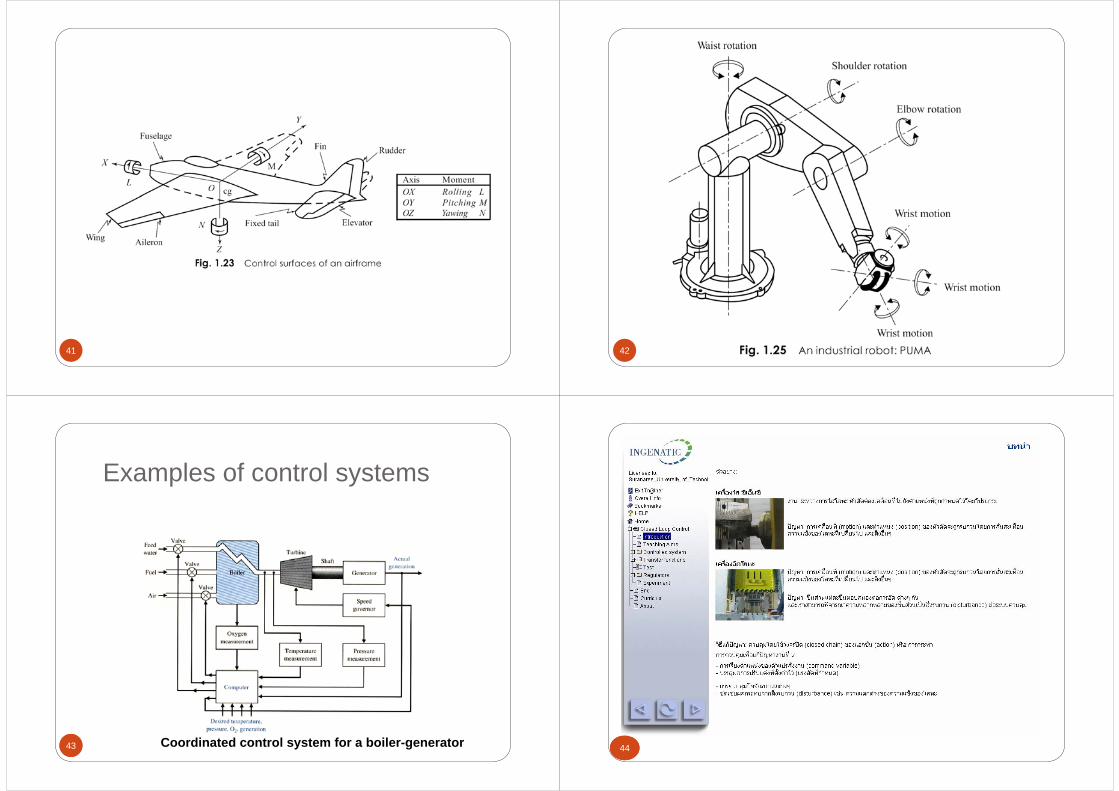
Examples of control systems
38
Water-level float regulator
39 40
Examples of control systems
40Hydraulic actuator with valve
41 42
43
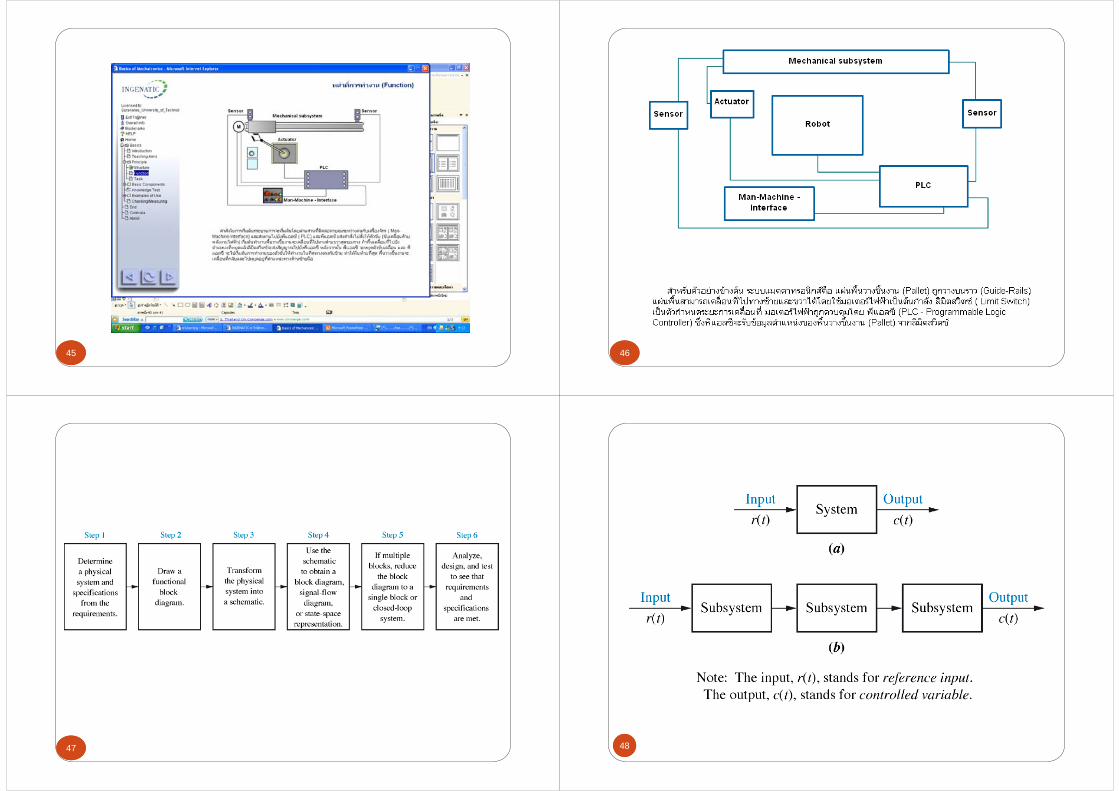
Examples of control systems
43 Coordinated control system for a boiler-generator 4444
4545 4646
4747 4848
4949





























