Embed Size (px)
DESCRIPTION
Problem RTSim system was not easily configurable Each simulation’s inputs & outputs had to be hard coded Existing modules were interfaced directly to the virtual reality module, limiting modularity Difficult to create/setup different simulations RTSim was not easily extendable to additional modules 3
Citation preview

Reconfigurable Communication Interface Between FASTER and RTSim
Dec0907

Team MakeupTeam Members:
Matthew McCollumMark KrauseDerek Keibler
Tyler Gustafson
Faculty Advisor:Dr. Steward
Client:John Deere
(Mark Klocke)
2

Problem RTSim system was not easily configurable• Each simulation’s inputs & outputs had to be hard coded• Existing modules were interfaced directly to the virtual
reality module, limiting modularity Difficult to create/setup different simulations RTSim was not easily extendable to additional
modules
3

Solution/Deliverables Create a new reconfigurable interface
• To control a variable number of inputs & outputs of modules and CAN bus• To handle a variable number of modules
A way to create/save/load different configurations (RTSim CoCoA)
Modify existing modules to comply with new reconfigurable interface solutions
Create documentation for future module development
4

Requirements Interface shall have reconfigurable communication protocol
between current and future modules Interface shall conform to CAN standards (SAE J1939 and
ISO 11783) RTSim CoCoA shall allow users to:
• load/filter a CAN database• load resource files• create connections between resource and CAN inputs/outputs• create configurations for the Reconfigurable Interface• save/load settings for various interface configurations and CAN input/output
connections
Interface shall be able to interpret/use the configuration files
5

Operating Environment Windows environment with JRE 6 and the .NET
framework
CAN-USB connection between Reconfigurable Interface and a CAN bus
TCP/IP network between Reconfigurable Interface and modules
6

Project Schedule Familiarized ourselves with the original system Created ‘prototype’ to show our understanding
• Updated old interface to read a speed CAN message• Updated old simulation model to use speed
Created operation process Created “Resource” and “Config” file format Created RTSim CoCoA Attempted to update old interface Created new interface Tested entire system
7

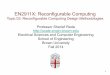
System Block Diagram
8

Process ExampleDev. A (VR Lab)
Dev. B (Dynamic Analyst)
VR Simulation Setup
VR
VR Resource File
Model B
Dynamic Simulation Module
DSM Resource File
9

Process Example Continued
VR
Model B
VR Resource File
DSM Resource File
CAN DatabaseCAN Log User (e.g. PV&V)
CoCoA
10

Config. File
Process Example Continued
User (e.g. PV&V)
Interface
CoCoA
11

CoCoA User Interface
12

Reconfigurable Interface Class Diagram
13

I/O Specifications Input configuration file is in XML Socket connections:
• have an unique port• send/receive byte arrays of a predefined size• output data on a specified interval
CAN messages:• sent on a 20ms interval• Received continually
14

Test Plan CoCoA will mainly be tested through Scenario Testing• Load/Filter a CAN database (view CAN messages in window)
• Load a Resource file (view resource and packet info in window)
• Make connections (view the connections in window)
• Create a config file (look through output .xml file)
Modules will be tested with a simple server program• Confirm server accepts connection from the modules (view screen output)
• Confirm server sends a set packet correctly (view screen output)
• Confirm server data received from the module (view module output)
• Confirm module sends a set packet correctly (view screen output)
15

Test Plan Continued Interface will be tested with simple modules• Configuration reading will be tested using various config files• Simple modules will have expected inputs• Simple modules will print out sent/received data• Compare expected with sent/received data
Complete system will be tested by combining the interface and all modules in order to run a VR simulation• View the VR monitor• Drive the tractor
16

Implementation CoCoA:
• Java (Eclipse)• Swing controls for GUI creation• XML reading/writing• Some design patterns used:
• Adapter/Wrapper• Observer• Iterator
Modules:• Dynamic Simulation Model - C (MatLAB)
• Changed from server to client architecture• Integrated conversion logic of old interface
• Steering Wheel Module - C++ (Visual Studio)• Integrated steering logic from old interface• Added client architecture
17

Implementation Continued Interface:
• C# (Visual Studio)• Server component
• Each module has its own ‘server’ thread• Configuration (XML) Reader
• Uses LINQ (Language Integrated Query)• CAN component
• Sends CAN messages onto the CAN bus• Receives and filters CAN messages from the CAN bus
• Some design patterns used:• Adapter/Wrapper• Observer• Iterator• Scheduler
18

Obstacles Learning curve for CAN usage
Building on top of an existing project
Incompatible compiler versions
Bit manipulation in a high level environment
19

Lessons Learned Project scope can be difficult to define with few
requirements Vague project scope can lead to feature creep
and create planning risks Starting from scratch can be better than reusing
existing projects Broadened knowledge of different programming
languages Professional relationship with an industrial client
20

Test Results CoCoA testing:
• Went through several iterations as Resource and Config file formats evolved
• Config files were created correctly for given configuration setups
Module testing:• Performed client operations as expected
Interface testing:• Performed server type operations as expected
System testing:• A tractor was simulated and steerable• More extensive system testing is not possible with the
resources available to us
21

Future Work What we have left:
• Meet with John Deere to demonstrate• Deliver project to John Deere
o Executableso Source codeo Manualo Example/existing modules (if desired)
Possibility for future projects:• Resource file creator/viewer• Unit conversion for connections
22

Summary The RTSim CoCoA allows quick and simple
creation of simulation configurations
Increased modularity of the Reconfigurable Interface design allows for easy addition modules
John Deere will now be able to easily create and run various simulations
23

Questions
24