Embed Size (px)
DESCRIPTION
Reconfigurable System for Turbine Blade Finishing. Engineering Research Center for Reconfigurable Manufacturing Systems. Motivation. Touch robot performs finish machining (of defects) on turbine blades Blade Inspection Machine performs accurate dimensional measurement of turbine blades. - PowerPoint PPT Presentation
Citation preview

NSF Engineering Research Center for Reconfigurable Manufacturing SystemsUniversity of Michigan College of Engineering
Reconfigurable System for Turbine Blade Finishing
Engineering Research Center for
Reconfigurable Manufacturing Systems

2NSF Engineering Research Center for Reconfigurable Manufacturing SystemsUniversity of Michigan College of Engineering
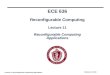
Motivation
•Touch robot performs finish machining (of defects) on turbine blades•Blade Inspection Machine performs accurate dimensional measurement
of turbine blades

3NSF Engineering Research Center for Reconfigurable Manufacturing SystemsUniversity of Michigan College of Engineering
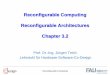
Integration of Measurement and Machining
Location Calculator
(Relative to the part)
Correction Action
Robot Part
Sensor
Measuring
Machine
CAD Model
+
-
Motion
Command
Robot Location
Measuring Machine location
Finished Parts
Data Processing
•Closed loop integration of measurement and machining•Inspection machine detects and measures defects on turbine blade•Defect coordinates fed to the automatic robot for machining•Robot machines the defects•Inspection machine validates machining

4NSF Engineering Research Center for Reconfigurable Manufacturing SystemsUniversity of Michigan College of Engineering
Integrated Hardware
Material removal robot
XYZ Positioner
Turbine blade
Non-contact sensor
2 axis rotary positioner
Possible addition of vision system for roughness detection

5NSF Engineering Research Center for Reconfigurable Manufacturing SystemsUniversity of Michigan College of Engineering
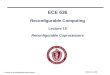
Preliminary Vision System Results
original image with angular illumination ROI gray level threshold

6NSF Engineering Research Center for Reconfigurable Manufacturing SystemsUniversity of Michigan College of Engineering
Next Steps
•Detailed work breakdown structure for project
•Technical specifications for hardware and software
•Alignment and calibration algorithms
•Measurement feasibility with laser system and vision system
•Registration algorithms to map to CAD model and specify regions of defects