-
Research ArticleReduced-Order Observers for Nonlinear State
Estimation inFlexible Multibody Systems
Ilaria Palomba ,1 Dario Richiedei ,2 and Alberto Trevisani 2
1Faculty of Science and Technology, Free University of
Bolzano-Bozen, Piazza Università 5, Bolzano 39100,
Italy2Department of Management and Engineering (DTG), Università
degli Studi di Padova, Stradella San Nicola 3,Vicenza 36100,
Italy
Correspondence should be addressed to Alberto Trevisani;
[email protected]
Received 10 August 2018; Accepted 8 October 2018; Published 1
November 2018
Academic Editor: Chao Tao
Copyright © 2018 Ilaria Palomba et al.%is is an open access
article distributed under the Creative Commons Attribution
License,which permits unrestricted use, distribution, and
reproduction in any medium, provided the original work is properly
cited.
Modern control schemes adopted in multibody systems take
advantage of the knowledge of a large set of measurements of
themost important state variables to improve system performances.
In the case of flexible-linkmultibody systems, however, the
directmeasurement of these state variables is not usually possible
or convenient. Hence, it is necessary to estimate them through
accuratemodels and a reduced set of measurements ensuring
observability. In order to cope with the large dimension of models
adoptedfor flexible multibody systems, this paper exploits model
reduction for synthesizing reduced-order nonlinear state
observers.Model reduction is done through a modified Craig-Bampton
strategy that handles effectively nonlinearities due to large
dis-placements of the mechanism and through a wise selection of the
most important coordinates to be retained in the model.
Startingfrom such a reduced nonlinear model, a nonlinear state
observer is developed through the extended Kalman filter (EKF).
%emethod is applied to the numerical test case of a six-bar planar
mechanism. %e smaller size of the model, compared with theoriginal
one, preserves accuracy of the estimates while reducing the
computational effort.
1. Introduction
Flexible-link multibody (FLMB) systems are highly prom-ising
from an economical and sustainability point of viewbecause of the
use of less material and the need for smalleractuators and less
power consumption. However, flexibilityoften results in unwanted
vibrations that limit motion ac-curacy and imposes advanced control
schemes accountingfor the flexible dynamics. High-performance
controlschemes are typically model-based [1–5] and often requirethe
knowledge of a large set of state variables [3–5]. Forexample, a
common application requiring the whole statevector (i.e., position
and speed of all the state variables) isactive control through
state feedback to assign the desiredmodal characteristics [6, 7].
%e knowledge of the tip po-sition of open-chain robots is also
needed for precise controlof the end-effector trajectory [8]. In
contrast, the directmeasurement of all the state variables is
rarely feasible orconvenient [9], so the unmeasured state variables
should beestimated by means of state observers that exploit a
smaller
set of measurements, ensuring the system observability andan
accurate system model. Most of the contributions in theliterature
have been focused on the state estimation in rigid-body multibody
systems [10–12], in flexible structures [13]or in single-link
flexible mechanisms [2, 14–17]. Complexityis significantly
exacerbated in the case of multilink flexiblesystems where state
estimation is, to date, still a challengingtask, mainly because of
the complex and large dimensionalmodels used to represent these
systems that make cum-bersome the synthesis of observers.
In the past, due to limitations of the computationalpower of
computers, the use of linearized [18] or linearizedreduced-order
models has been proved to be a good trade-off between accuracy and
computational complexity [18–20]. Indeed, computational effort
should be reduced bykeeping model size as small as possible to
perform real-timeestimations. Hence, model reduction is a powerful
tool toboost the use of state observers, by representing through
themodel just the state variables that are of interest for
esti-mation and control purposes (i.e., those having higher
HindawiShock and VibrationVolume 2018, Article ID 6538737, 12
pageshttps://doi.org/10.1155/2018/6538737
mailto:[email protected]://orcid.org/0000-0001-9621-9477http://orcid.org/0000-0003-1180-3004http://orcid.org/0000-0002-2868-3128https://creativecommons.org/licenses/by/4.0/https://creativecommons.org/licenses/by/4.0/https://doi.org/10.1155/2018/6538737
-
observability and controllability [20]). Several approaches
tomodel reduction have been presented in the literature to datefor
linear mechanical systems [21]. For example, in the fieldof
structural dynamics, one of the most widespread re-duction
techniques is the Craig-Bampton (CB) method [22]because of its
effectiveness and ease of implementation.
In the very recent years, the use of nonlinear state ob-servers
has been proved to be effective for improving ac-curacy of state
estimation in multibody systems, comparedto linearized observers
[2]. Indeed, the use of nonlinearmodels and variable gains of the
observer handles moreeffectively the nonlinear behavior of these
systems. %isincrease of the computational complexity of these
observersstill calls for the use of reduced-order models.
%e typical implementation of the aforementioned CBmethod for
reducing FLMB systems exploits the componentmode synthesis strategy
[21]. Basically, the linear FE modelsof all the links are generated
and reduced and, then, they areembedded in a moving frame [23] or
in a corotational frame[24], to represent large displacements of
the mechanism.Such a component-level reduction strategy might
negativelyaffect the reduced model correctness since it does not
fullyaccount for modal characteristic changes due to the motionof
the multibody system. To overcome this issue, somestudies have
recently suggested the use of model reduction atthe system-level,
i.e., of the model of the whole system. Onthe one hand, this choice
represents more effectively thechange of the modal characteristics
of the system [25]. Onthe other hand, system-level reduction
ensures a more ef-fective selection of the state variables to be
retained in thereduced-order model, thus providing a better
trade-offbetween model size and accuracy [26].
By taking advantage of the idea of using reduced-ordernonlinear
models in the design of nonlinear observers, thiswork proposes a
novel and comprehensive approach forefficient and accurate state
estimation in FLMB systems. %emethod exploits the modified
nonlinear CB reductionsuitable for flexible-link mechanisms based
on the equiva-lent rigid-link system (ERLS) and formulated through
or-dinary differential equations (and hence independentcoordinates)
outlined in [25] and a wise selection of the mostimportant
coordinates, as proposed in [26]. Such a model,that ensures that
the dynamics with the highest observabilityand controllability are
modeled in the system, is used for thesynthesis of an extended
Kalman filter (EKF) [27] to deliveraccurate estimates of both the
large motion and of the elasticvibrations of a FLMB system by means
of a small set ofsensed signals and with a reduced computational
effort.
%e method is validated numerically, by investigatingsensitivity
to model uncertainty and measurement noise, bymeans of a planar
6-link FLMB system.
2. Modeling
2.1. Full-Order Dynamic Model: ERLS Approach. In thiswork, the
equations of motion for a FLMB system undergoinglarge rigid-body
motion are modeled through the equivalentrigid-link system (ERLS)
formulation. FLMB systems withscleronomous and holonomic
constraints are assumed. %e
motion of the system is notionally separated into the
largemotion of a rigid-link moving reference configuration
(ERLS)and the small elastic deformation of the flexible links
withrespect to the ERLS itself. %erefore, the configuration ofa
FLMB system is defined through a set of generalized rigid-body
coordinates q and elastic coordinates u that are the full-order
model independent coordinates:
x �q
u , (1)
where the dimension of x, denoted as n, is the number ofdegrees
of freedom (dofs) of the full-order model.
%e system model is given by the following set ofnonlinear ODEs
[23]:
ST(q)M(q)S(q) ST(q)M(q)
M(q)S(q) M(q)⎡⎣ ⎤⎦
√√√√√√√√√√√√√√√√√√√√√√√√√√√√M(q)
€q
€u
+ST(q)M(q) _S(q, _q) ST(q) 2MG(q) + C(q)(
M(q) _S(q, _q) 2MG(q) + C(q)
√√√√√√√√√√√√√√√√√√√√√√√√√√√√√√√√√√√√√√√√C(q)
_q_u
+0 00 K(q)
√√√√√√√√K(q)
qu �
ST(q) ST(q)M(q)I M(q)
f(q)g(q)
√√√√√√√√√√√√√√√√√√√√√√√√√√F(q)
.
(2)
Finite elements are used in Equation (2) to get the
mass,stiffness, damping, and centrifugal and Coriolis
matrices(denoted M, K, C, and MG, respectively) by assembling
theconsistent matrices of each finite element. In Equation (2),
gand f denote the gravity acceleration and the external
forcevector, respectively. S is the ERLS sensitivity
coefficientmatrix for all the nodes of the finite elements and _S
is its timederivative. %e mass, damping, and stiffness matrices of
thefull-order model have been introduced in Equation (2) anddenoted
as M, C, and K, respectively. F is the full-ordervector of the
external forces.
2.2. Reduced-Order Dynamic Model: Modified Craig-Bampton Method.
A dynamic model reduced through theCB method is represented through
a hybrid set of co-ordinates, including some physical coordinates
xm (namedthe master dofs) and some nonphysical coordinates η(named
interior modal coordinates).
%e full-order set of physical coordinates x of the originalmodel
is approximated through a reduced set of hybridcoordinates p by
means of the CB transformation matrix H:
x ≈ H · p,
x ∈ Rn,
p ∈ Rr, r≪ n.
(3)
In the standard formulation of the CB method, usuallyadopted for
structures and linear systems, the transformationmatrix in Equation
(3) is constant. Conversely, in the case of
2 Shock and Vibration
-
mechanisms performing large displacements, it should
bereformulated as a configuration-dependent matrix to copewith the
nonlinearities of the FLMB models [25]:
x ≈ H q, q∗( p,
x �xmxs
∈ Rn�m+s,
p �xmη
∈ Rr�m+p, p≪ s.
(4)
In Equation (4), xTm � qT uTm ∈ Rm is the m-di-
mensional set of the master dofs, which comprises all theERLS
coordinates q and some meaningful elastic co-ordinates um (e.g.,
those where external loads are applied).%e s-dimensional vector xTs
� u
Ts ∈ R
s (m + s � n) in-cludes the remaining elastic coordinates that
are trans-formed into interior modal coordinates through
thetransformation matrix H. %e configuration-dependent CBreduction
matrix in Equation (4) is defined as follows:
H q, q∗( �I 0
B(q) Ψ q, q∗( . (5)
In Equation (5), I and 0 are the identity and null ma-trices,
respectively, B is the position-dependent Guyan’smatrix and Ψ is
the configuration-dependent interior modematrix. %e definition of
matrix Ψ � Ψ(q, q∗) is a key pointof the method and is obtained by
the following three steps:
(1) Computation of the Interior Mode Matrix Φ at anEquilibrium
Configuration q∗. %e so-called interiormode matrix Φ of the
subsystem made by the slavedofs is computed through local modal
analysis. Sincethe model is nonlinear, modal analysis is done
byplacing the ERLS at a given equilibrium configurationq∗ (obtained
by setting _q � €q � 0) and linearizing thesystem with the master
dofs constrained. %e equi-librium point can be conveniently chosen
as anyarbitrary point belonging to the desired trajectory.
(2) Selection of the Interior Modes. A suitable number ofcolumns
ofΦ is removed to get the truncated interiormode matrix Φ. Such a
rectangular matrix approxi-mates the full-order set of slave dofs
with a smaller setof meaningful interior coordinates (Equation
(4)). Akey point for getting accurate reduced models is theproper
selection of the interior modes to be retained[26, 28, 29]. In
Section 4.1, the strategy followed in thispaper will be briefly
explained, even if any arbitraryselection method can be
adopted.
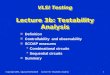
(3) Definition of the Configuration-Dependent InteriorMode
Matrix Ψ. %e truncated interior mode matrixΦ, computed for q � q∗,
should be transformed tofollow the motion of the ERLS. Under the
reasonablehypothesis of small elastic deformations with respectto
the ERLS, on which the ERLS theory is based,eigenmodes change
slowly if expressed with respect tothe reference system of the
finite elements. Such anidea is schematically represented in Figure
1, wherefor sake of clarity a planar single flexible link has
been
represented. In the ERLS model, the components ofeach
eigenvector φ are expressed with respect to theERLS configurations
(Figures 1(a) and 1(b)), and it isevident that these components are
different. However,if a local reference frame {x,y} is adopted to
expressthe eigenvectors, the coordinates are almost the samealso
for different ERLS configurations (Figures 1(c) and1(d)). %is
hypothesis has been assessed in [25].%erefore, it is possible to
extend the validity of theinterior mode matrix Φ, computed at q∗,
in a widesubset of the workspace, by projecting it onto the
localreference frame of each finite elements and thenprojecting it
again onto the actual instantaneous ERSLq through a suitable
transformation matrix R �R(q, q∗) (see [25] for a detailed
description):
Ψ q, q∗( � R q, q∗( Φ q∗( . (6)
Once H is defined, the reduced model is obtained
bypremultiplying Equation (2) by HT:
HT q, q∗( M(q)H q, q∗( √√√√√√√√√√√√√√√√√√√√
M
€xm€η
+ HT q, q∗( C(q, _q)H q, q∗( √√√√√√√√√√√√√√√√√√√√√√
C
_xm_η
+ HT q, q∗( K(q)H q, q∗( √√√√√√√√√√√√√√√√√√√√
K
xmη
� HT q, q∗( F(q)√√√√√√√√√√√√
F
.
(7)
%emass, damping, and stiffness matrices of the reducedmodel have
been introduced in Equation (7) and denoted asM, C, and K
respectively. F is the reduced-order vector of theexternal
forces.
3. State Estimation
3.1. Model Formulation. %e synthesis of a state observerrequires
the dynamicmodel in Equation (7) to be formulatedin a state-space
(first-order) form, as follows:
_z � f(z, F),
y � g(z, F),
⎧⎨
⎩ (8)
where z � pT _pT Tis the reduced-order state vector, _z is
its
derivative, and y is the vector of the measured outputs
(oftendenoted as the observations). Both the system equation f
andthe measurement equation g in Equation (8) are usuallynonlinear
functions of the state and of the input F. %e directuse of ODEs for
the formulation of the multibody model inEquation (2) makes
straightforward the achievement of thestate-space form required for
state estimation.
By taking advantage of Equation (7), the
nonlinearcontinuous-time system equations in Equation (8) take
thefollowing form:
_z �_p€p
�0 I
− M−1(q)K(q) − M−1(q)C(q, _q)
p_p
+0
M−1(q) F.
(9)
Shock and Vibration 3
-
3.2. �e Extended Kalman Filter (EKF). �e estimation al-gorithm
employed in this work is the EKF [25] that is thesimplest and most
widespread extension of the well-knownKalman �lter to nonlinear
state estimation. Such a �lterrequires a discrete-time
representation of the system modelin Equation (8):
zk � fd zk−1, F̃k−1, vk−1( ),yk � g zk,wk( ),
(10)
fd is the discrete-time state equation, obtained by
dis-cretizing f through any arbitrary scheme and k refers to thekth
time sample. In Equation (10), vk−1 and wk are theprocess noise and
measurement noise that are assumed inthe Kalman theory to be
zero-mean uncorrelated Gaussiannoise with covariance matrices Q and
R, respectively.
�e EKF is a discrete-time recursive algorithm thatoperates in
two stages: the prediction and the correction.Only a brief
explanation is provided here. �e readers couldrefer to the quoted
literature for a more detailed description.
In the �rst stage, at each time step k, the �lter predicts
thestate and the observation by means of the nonlinear modeland
measurement equations, respectively:
ẑk|k−1 � fd ẑk−1|, F̃k−1|, vk−1|( ),
ŷk|k−1 � g ẑk|k−1,wk( ).(11)
Additionally, it propagates the state and observationerror
covariance matrices (denoted as P̂zzk|k− 1, P̂
yyk|k− 1, and
P̂zyk|k− 1) by means of the Jacobians of the system and
mea-surement equations (Âk−1 and D̂k|k−1 respectively), com-puted
about the estimated state trajectory:
Âk−1 �zfzz
∣∣∣∣∣∣∣̂zk−1 ,̃Fk−1,
P̂zzk|k−1 � Âk−1P̂zzk−1Â
Tk−1 +Q,
(12)
D̂k|k−1 �zgzz
∣∣∣∣∣∣∣̂zk|k−1,
P̂yyk|k−1 � D̂k|k−1P̂zzk|k−1D̂
Tk|k−1 + R,
P̂zyk|k−1 � P̂zzk|k−1D̂
Tk|k−1.
(13)
Once the next measurements yk are available, the pre-dicted
state is corrected through the error of output esti-mation (yk −
ŷk|k−1) weighed through the �lter gain Kk:
ẑk � ẑk|k−1 + Kk yk − ŷk|k−1( ),
Kk � P̂zyk|k−1 P̂
yyk|k−1[ ]−1.
(14)
Finally, the state error covariance matrix is updated:
XYq∗
φiφi,Y
φi,X
i th ele
ment
r(q∗)
FLMBERLS
XYq
φi
φi,Yφi,Xi
th ele
ment
r(q)FLMBERLS
y ix i
XYq∗
φiφi,y
φi,x
i th ele
ment
r(q∗)
FLMBERLS
y i x i
XYq
φiφi,y
φi,xi th el
emen
t
r(q)FLMBERLS
Glo
bal r
efer
ence
fram
e{X
; Y}
Loca
l ref
eren
ce fr
ame
{xi; y
i}
q∗ q
(a) (b)
(c) (d)
Figure 1: Example of eigenvector components in a planar exible
single link for two ERLS con�gurations: q∗ (a–c) and q (b–d), with
respectto the global reference frame (a-b) and the local reference
frame (c-d).
4 Shock and Vibration
-
Pzzk � Pzzk|k− 1 −Kk P
yyk|k− 1K
Tk . (15)
Equations (12) and (13) reveal that gain Kk of the
filtercorrection depends on the covariance matrices Q and R.
Asuccessful estimation relies both on an accurate model and ona
good tuning of these matrices: while R can be measured, Qshould be
usually tuned to give the proper weights to modelpredictions and
noisy measurements in state estimates.
4. Numerical Validation
Numerical simulations have been performed throughMatlab to
validate the nonlinear reduced-order observer.Such a validation
allows for an effective assessment of theobserver outcomes since it
is possible to evaluate andcompare any state variable, including
the elastic ones whichare difficult to measure in an experimental
setup. Addi-tionally, it is possible to evaluate the impact of the
modelreduction on the model accuracy and its effect on the
ob-server stability. Indeed, a wrong model reduction causesrelevant
estimation errors and might lead to instabilitybecause of
observation spillover phenomena [20].
4.1. System Description. %e planar mechanism shown inFigure 1 is
used as the test case for the validation. %emechanism lies on the
horizontal plane and is supposedto be driven by three motors: two
motors drive theabsolute rotation of links 1 and 2, while the third
one drivesthe relative rotation between links 4 and 5. All the
linkshave circular cross section and dimensions as shown inFigure
2(a) and are supposed to be made of aluminium withelastic modulus
69GPa and mass density 2700 kg/m3. Two-node, six-dof beam elements
have been employed to modelthe links, leading to the finite element
model shown inFigure 2(a). %e joints, the brakes, and the rotors of
themotors have been modeled as lumped masses and nodalinertias,
whose values are stated in Table 1.
%e resulting full-order model has 30 dofs, includingthree ERLS
coordinates (defined as the absolute rotations oflinks 1, 2, and 5)
and 27 elastic displacements. %e full-ordermodel has been reduced
by applying the reduction strategydiscussed in Section 2.2 and by
selecting the interior modesto be retained by means of the interior
mode ranking (IMR)method [25]. Such a method ranks the interior
modesbased on their contributions to the dynamics of the full-order
system at the frequencies of interest, i.e., to representthe
vibrational modes of the full system that have
highercontrollability and observability and hence mainly affectthe
system dynamics. By means of a correct representationof these
vibrational modes, it is possible to synthesizea reduced-order
model, and hence an observer, that ac-curately represents the
system dynamics that are excitedand observed. In the test case
under investigation, a re-duced model accurately matching the full
system dy-namics in the frequency range 0–180Hz has been
obtainedthat is a reasonable value if compared with the
typicalbandwidths of motion controllers. Indeed, vibrationalmodes
outside the controller bandwidth cannot be neither
excited nor controlled by the control loop. To reach sucha goal,
the interior modes have been ranked trough theIMR method, and then
the number of interior modes to beretained has been evaluated
through accuracy indices,comparing all the eigenstructure of the
full-order model inthe frequency range 0–180Hz with the ones of
thereduced-order model synthesized at the equilibriumconfiguration
q∗ � 1.0821 2.6354 4.7123 T. Two indicesare used. %e first one is
normalized cross orthogonality(NCO), which provides a measure of
the mass-matrix-orthogonality between the vibrational mode of
interestrepresented through the full-order model φ and
thereduced-order one φ:
NCO �φTMHφ
φTMφ( φTHTMHφ( . (16)
%e second index is the relative percentage error on thenatural
frequencies:
εf �|f− f|
f· 100. (17)
In Equation (17), f and f are the frequency of the modeof
interest in the full and in the reduced-order model, re-spectively.
%e target value for the NCO is one, while it iszero for εf. By
assuming reasonable thresholds on theseindices, the number of
interior modes to be retained isdetermined and hence the truncated
interior mode matrix Φis determined.
%e set of the reduced coordinates obtained in thisexample has
just 13 dofs and contains 8 physical coordinatesxm (i.e., the
master dofs, shown in red in Figure 2(b)) and 5interior modal
coordinates η:
xm � q1 q2 q3 x14 y15 θ24 x25 y26 T,
η ∈ R5x1.(18)
Table 2 shows the values of the NCO and the εf for all
thevibrational modes of the system in the frequency range
ofinterest at the equilibrium configuration q∗. It is evident
thatthe system dynamic is correctly represented. Similar
resultshave been obtained by evaluating the accuracy of sucha
reduced model in a neighborhood of the equilibriumconfiguration
(see [25] for a detailed description).
Having reduced to 13 the dimensions of the model, thefirst-order
formulation of the reduced model has a 26-di-mensional state vector
versus the 60 state variables of thefull-order model. %us, a great
reduction has been obtained.
%e measured inputs of the state observer are the threetorques
exerted by the three actuators (T1, T2, and T3 inFigure 2(b)):
F � T1 T2 T3 0 0 −T3 0 0 0 0 0 0 0 T.
(19)
Six sensed outputs are available to compute the
observerinnovation: the angular positions of the three-actuated
links(q1, q2, and q3) and the curvatures (strains) at the
midpointsof links 1, 2, and 4 (Figure 2(b)), denoted as c1, c2, and
c4:
Shock and Vibration 5
-
y � q1 q2 q3 c1 c2 c4{ }T. (20)
It should be noted that c1, c2, and c4 are nonlinearcombination
of the state variables. �is choice of sensedoutputs ensures that
system is observable, as corroborated bythe rank analysis of the
observability matrix obtained bylinearizing the model around a set
of equilibrium con�g-urations in the whole manipulator
workspace.
4.2. Estimation Results. �e measurements have been gen-erated
through the full-ordermodel, which can be thought ofas the “real
mechanism.” In contrast, the observer is based
on the nonlinear reduced-order model and uses noisymeasurements
since all the simulated measured signals thatare fed to observer
are supposed to be corrupted by Gaussianwhite noise with realistic
values for the sensors. Such a noisehas been generated as normally
distributed random num-bers (by the “randn” function in MATLAB)
having zeromean and the standard deviation (denoted as σ) stated
inTable 3 for all the sensed measurements. �en, all themeasured
signals have been digitized trough a 24-bit analog-to-digital
converter, with input range ±10V.
A multirate EKF has been implemented: the continuous-time
equations of motion of the real mechanism in Equation(9) have been
discretized through the fourth-orderRunge–Kutta method with an
integration step of 0.1ms,while the measured signals have been
updated at 500Hz.
A motion lasting 3 seconds has been tested. �e manip-ulator
end-eector is required to track a path describinga
semicircumference of radius 0.15m (shown in Figure 3).�e motion of
the mechanism is open-loop controlled by thecomputed torques shown
in Figure 4 (computed through therigid-body model). No closed-loop
control of the trajectory isperformed, since it is out of the scope
of the paper. Addi-tionally, no vibration control is performed in
order to excite thevibrational modes and hence to clearly evaluate
if the reduced-order model and the observer are able to represent
such dy-namics.�e noisy sensed outputs (Equation (18)) employed
forcomputing the observer innovation are shown in Figure 5.
�e estimates of the angular positions and velocities ofthe
three-actuated links are plotted in Figures 6 and 7, re-spectively,
and are compared with those delivered by the realmechanism (i.e.,
those without noise). �e same �gures alsoshow the estimation error,
i.e., the dierence between thetwo signals. �ese �gures clearly show
that the observer isstable, and it delivers accurate estimates of
the manipulatorgross motion, despite the presence of noise aecting
mea-surements. Indeed, the amplitude of the estimation error
issmaller than the measurement noise, as corroborated by
thecomparison of Figures 4 and 5.
0.02m
0.282
mLI
NK
5
Node 14
Node 11
Node 4
Nodes 2, 6
Nodes 5, 10
Nodes 1, 3
Node 7
Nodes 8, 9
Nodes 12, 13
1.2m
0.5m
LINK 4
LINK 10.5m
0.03m0.
03m 0.01
6m
0.85
mLI
NK
2
0.85
mLI
NK
3
0.024m
(a)
Master dofsInputsOutputs
x25y26
x14
y15
q3
q2q1
T3
T2T1
γ4
γ2
γ1
θ24
(b)
Figure 2: Studied mechanism: �nite element model (a) variables
involved in the estimation process (b).
Table 1: Lumped masses and nodal inertia.
Node Mass (kg) Inertia (10−2 kgm2)1 7.644 1.302 0.392 0.003
9.517 2.294 0.400 0.005 0.648 0.006 0.671 0.008 0.383 0.009 0.658
0.0010 0.308 0.0012 1.537 0.0013 0.095 0.1514 0.046 0.00
Table 2: Evaluation of the accuracy of the reduced model.
Mode frequency (Hz) NCO (–) εf (%)13.28 1.0000 0.011043.29
1.0000 0.001264.63 1.0000 0.0699124.25 0.9937 1.7157143.21 0.9983
0.5725159.36 1.0000 0.0112
6 Shock and Vibration
-
Similar considerations can be obtained from Figures 8and 9,
which show the linear elastic displacements andvelocities of the
manipulator tip that might be of interest forimplementing
trajectory control schemes. Again, there isa good agreement between
the estimated variables and theactual ones, both in terms of
amplitude and frequencycontent of the time-histories.
As a consequence of these precise estimates, the
absolutedisplacement of the manipulator tip is very accurately
es-timated, and its trajectory in the Cartesian space is
almostoverlapped to the actual one, as shown in Figure 2.
Further evidences of the observer eectiveness comefrom the fast
Fourier transforms (FFT) of the tip elasticdisplacements, as shown
in Figure 10: the spectra of theestimated ones are almost perfectly
overlapped to those ofthe real mechanism. Such a result further
con�rms thecapability of the reduced-order model to represent
correctlythe dynamics of the manipulator in the frequency
range0–180Hz, where the reduced model has been tuned.
4.3. Sensitivity Analysis. A sensitivity analysis has
beencarried out to assess observer robustness to model
uncertainties. In particular, the payload mass carried at thetip
of the real mechanism has been modi�ed by increasing itof the 25%,
50%, 75%, and 100% of its original value. Incontrast, the payload
mass of the reduced-order modeladopted in the observer has been
kept constant and equal to thenominal value. Randommeasurement
noise, as in the previoustest, has been adopted to corrupt the
measured signals.
Simulation outcomes have been summarized throughthe mean μ and
the standard deviation σ of the estimationerrors averaged over 100
simulations for each value of thea payload mass:
μτ �1100
∑100
j�11/ns∑
ns
k�1τk,j − τ̂k,j∣∣∣∣∣
∣∣∣∣∣︸�������︷︷�������︸
μj
,
στ �1100
∑100
j�1
�����������������������1
ns − 1∑ns
k�1τk,j − τ̂k,j∣∣∣∣∣
∣∣∣∣∣− μj( )2
√√
.
(21)
In Equation (21), τ denotes a generic estimated variable;τk,j
and τ̂k,j are the estimated and the actual values of τ,
t (s)
–10
–5
0
5
T 1 (N
m)
0 1 2 3t (s)
–20
–10
0
10
T 2 (N
m)
0 1 2 3 0 1 2 3t (s)
–0.05
0
0.05T 3
(Nm
)
Figure 4: Actuator forces.
–1.4 –1.35 –1.3 –1.25 –1.2 –1.15 –1.1x end effector (m)
–0.42
–0.36
–0.3
–0.24–0.26–0.28
–0.32–0.34
–0.38–0.4
y en
d ef
fect
or (m
)
ObserverSimulator
Figure 3: End-eector trajectory: actual (red) and estimated
(blue).
Table 3: Standard deviations assumed for each measurement
noise.
σT1(Nm)
σT2(Nm)
σT3(Nm)
σq1(rad)
σq2(rad)
σq3(rad)
σc1(1/m)
σc2[1/m]
σc4(1/m)
2 · 10−1 4 · 10−1 1 · 10−3 3.1 · 10−3 3.5 · 10−3 1 · 10−2 5 ·
10−5 8 · 10−5 1.5 · 10−4
Shock and Vibration 7
-
t (s)
0.65
0.7
0.75
0.8
0.85q 1
(rad
)
0 1 2 3t (s)
2.5
2.55
2.6
2.65
2.7
q 2 (r
ad)
0 1 2 3t (s)
4.2
4.4
4.6
4.8
5
5.2
5.4
q 3 (r
ad)
0 1 2 3
(a)
t (s)
–1
–0.5
0
0.5
1
1.5
γ 1 (1
/m)
×10–3
0 1 2 3
γ 2 (1
/m)
×10–3
t (s)
–2
0
2
4
0 1 2 3
γ 4 (1
/m)
×10–3
t (s)
–4
–2
0
2
4
6
0 1 2 3
(b)
Figure 5: Measured outputs: angular positions of the actuated
links (a); curvatures of links 1, 2, and 4 (b).
ObserverSimulator
ObserverSimulator
ObserverSimulator
t (s)
0.65
0.7
0.75
0.8
0.85
q 1 (r
ad)
0 1 2 3t (s)
2.5
2.55
2.6
2.65
2.7
q 2 (r
ad)
0 1 2 3t (s)
4.2
4.4
4.6
4.8
5
5.2
5.4q 3
(rad
)
0 1 2 3
(a)
ObserverSimulator
ObserverSimulator
ObserverSimulator
×10–4
t (s)
–4
–2
0
2
4
q 1 er
ror (
rad)
0 1 2 3
×10–4
t (s)
–4
–2
0
2
4
q 2 er
ror (
rad)
0 1 2 3
×10–3
0 1 2 3t (s)
–1
0
1
q 2 er
ror (
rad)
(b)
Figure 6: Estimated angular positions of the actuated links (a)
and estimation errors (b).
8 Shock and Vibration
-
ObserverSimulator
t (s)
–0.4
–0.2
0
0.2
dq1/
dt (r
ad/s
)
0 1 2 3
ObserverSimulator
t (s)
–0.2
0
0.2
0.4
dq2/
dt (r
ad/s
)
0 1 2 3
ObserverSimulator
t (s)
–0.2
0
0.2
0.4
0.6
dq3/
dt (r
ad/s
)
0 1 2 3
(a)
ObserverSimulator
t (s)
–0.01
0
0.01
dq1/
dt er
ror (
rad/
s)
0 1 2 3
ObserverSimulator
t (s)
–0.01
0
0.01dq
2/dt
erro
r (ra
d/s)
0 1 2 3
ObserverSimulator
0 1 2 3t (s)
–0.06
–0.04
–0.02
0
0.02
0.04
dq3/
dt er
ror (
rad/
s)(b)
Figure 7: Estimated angular velocities of the actuated links (a)
and estimation errors (b).
ObserverSimulator
t (s)
–1
–0.5
0
0.5
1
1.5
x 25 (
m)
×10–3
0 1 2 3
ObserverSimulator
t (s)
–3
–2
–1
0
1
2
y 26 (
m)
×10–3
0 1 2 3
(a)
ObserverSimulator
t (s)
–4
–2
0
2
4
x 25 e
rror
(m)
×10–5
0 1 2 3
ObserverSimulator
t (s)
–5
0
5
y 26 e
rror
(m)
×10–5
0 1 2 3
(b)
Figure 8: Estimated elastic displacements of the elastic
coordinates of the end-eector (a) and estimation error (b).
Shock and Vibration 9
-
respectively, at the kth simulation step of the jth run; and
nsis the number of sample of each run.
�e means (markers) and the standard deviations(lines) of the
estimation errors of the linear displacementsand velocities of the
tip coordinates are shown in Figure 11.Clearly, the case of no
added mass corresponds to theresults shown in Figures 5–9 for
random noise. Althoughmismodeling aects negatively the estimation
by in-creasing both the mean value and the standard deviation
of the errors, the estimation errors are small even in
thepresence of a payload mass twice the expected one. �isresult
corroborates the correctness of both the modelreduction approach
and the estimation scheme proposed.
5. Conclusions
A nonlinear state observer based on the extended Kalman�lter and
on a reduced dynamic model of a exible-link
ObserverSimulator
t (s)
–0.05
0
0.05
0.1
dx25
/dt (
m/s
)
0 1 2 3
ObserverSimulator
t (s)
–0.1
–0.05
0
0.05
0.1
dy26
/dt (
m/s
)
0 1 2 3
(a)
ObserverSimulator
t (s)
–0.02
–0.01
0
0.01
0.02
dx25
/dt e
rror
(m/s
)
0 1 2 3
ObserverSimulator
0 1 2 3t (s)
–0.01
0
0.01
dy26
/dt e
rror
(m/s
)
(b)
Figure 9: Estimated elastic velocities of the elastic
coordinates of the end-eector (a) and estimation error (b).
50 100 150
2
4
6
8
10
12
14
16
18
|X25
|
×10–5
ObserverSimulator
ObserverSimulator
50 100 150Frequency (Hz)Frequency (Hz)
0.5
1
1.5
2
|Y26
|
×10–4
Figure 10: FFT of the elastic displacements of the
end-eector.
10 Shock and Vibration
-
manipulator has been successfully synthesized. Model re-duction
has been performed through a modi�ed Craig-Bampton strategy that
handles nonlinearities by properlymodifying the transformation
matrix and that trades-obetween model size and accuracy through a
wise selectionof the most important interior modes to be
retained.
�e numerical results prove that such an observer
deliversaccurate estimates of both the rigid-body motion and
theelastic displacements. Observer robustness to measurement
noise and model uncertainties has been also proved by in-cluding
noise and parameter variation.
�e great reduction of the computational eort due tothe reduction
of the model size makes the proposed observerpromising for getting
e§cient state estimates in the controlof exible-link multibody
systems.
Data Availability
�e data used to support the �ndings of this study areavailable
from the corresponding author upon request.
Conflicts of Interest
�e authors declare that they have no conicts of interest.
References
[1] R. Caracciolo, D. Richiedei, and A. Trevisani,
“Deformationcontrol in rest-to-rest motion of mechanisms with
exiblelinks,” Shock and Vibration, vol. 2018, Article ID 9016028,9
pages, 2018.
[2] M. Morlock, C. Schröck, M. Burkhardt, and R.
Seifried,“Nonlinear state estimation for trajectory tracking of a
exibleparallel manipulator,” IFAC-PapersOnLine, vol. 50, no. 1,pp.
3449–3454, 2017.
[3] Q. Zhang, X. Zhang, and J. Wei, “Experimental study of
activevibration control of planar 3-RRR exible parallel
robotsmechanism,” Shock and Vibration, vol. 2016, Article
ID4780181, 17 pages, 2016.
[4] E. Lu, W. Li, X. Yang, M. Fan, and Y. Liu, “Modelling
andcomposite control of single exible manipulators with
pie-zoelectric actuators,” Shock and Vibration, vol. 2016,
ArticleID 2689178, 14 pages, 2016.
[5] E. Barjuei, P. Boscariol, R. Vidoni, and A. Gasparetto,
“Robustcontrol of three-dimensional compliant mechanisms,”
ASMEJournal Dynamic Systems, Measurements and Control,vol. 138, no.
10, article 101009, 2016.
[6] H. Ouyang, D. Richiedei, and A. Trevisani, “Pole
assignmentfor control of exible link mechanisms,” Journal of Sound
andVibration, vol. 332, no. 12, pp. 2884–2899, 2013.
[7] M. G. Tehrani and H. Ouyang, “Receptance-based partial
poleassignment for asymmetric systems using state-feedback,”Shock
and Vibration, vol. 19, no. 5, pp. 1135–1142, 2012.
[8] C. Sun, W. He, and J. Hong, “Neural network control ofa
exible robotic manipulator using the lumped spring-massmodel,” IEEE
Transactions on Systems, Man, and Cybernetics:Systems, vol. 47, no.
8, pp. 1863–1874, 2017.
[9] Y. Su, P. C. Muller, and C. Zheng, “A simple nonlinear
ob-server for a class of uncertain mechanical systems,”
IEEETransactions on Automatic Control, vol. 52, no. 7, pp.
1340–1345, 2007.
[10] E. Sanjurjo, M. Naya, J. Blanco-Claraco, J.
Torres-Moreno,and A. Giménez-Fernández, “Accuracy and e§ciency
com-parison of various nonlinear Kalman �lters applied to
mul-tibody models,” Nonlinear Dynamics, vol. 88, no. 3,pp.
1935–1951, 2017.
[11] E. Sanjurjo, D. Dopico, A. Luaces, and M. A. Naya, “State
andforce observers based on multibody models and the indirectKalman
�lter,” Mechanical Systems and Signal Processing,vol. 106, pp.
210–228, 2018.
[12] I. Palomba, D. Richiedei, and A. Trevisani, “Kinematic
stateestimation for rigid-link multibody systems by means of
Percentage of mass added to the end-effector
1
2
3
μ x25
, σx2
5 (m
)
×10–5
0 25 50 75 100
μ y26
, σy2
6 (m
)
Percentage of mass added to the end-effector
0
1
2
3
4
0 25 50 75 100
×10–5
(a)
0 25 50 70 100Percentage of mass added to the end-effector
2
4
6
8
μ dx2
5/dt
, σdx
25/dt (
m/s
)
×10–3
μ dy2
6/dt
, σdy
26/dt (
m/s
)
0 25 50 75 100Percentage of mass added to the end-effector
2
4
6
×10–3
(b)
Figure 11: Means (markers) and standard deviations (lines) of
theestimation errors on the linear elastic displacements (a) and
ve-locities (b) of the end-eector for dierent values of payload
mass.
Shock and Vibration 11
-
nonlinear constraint equations,”Multibody System Dynamics,vol.
40, no. 1, pp. 1–22, 2017.
[13] A. Zuyev and O. Sawodny, “Modelling and control of a
shellstructure based on a finite dimensional variational
formula-tion,” Mathematical and Computer Modelling of
DynamicalSystems, vol. 21, no. 6, pp. 591–612, 2015.
[14] P. Makinen, T. Mononen, and J. Mattila, “Inertial
sensor-based state estimation of flexible links subject to bending
andtorsion,” in Proceedings of the 14th IEEE/ASME
InternationalConference on Mechatronic and Embedded Systems
andApplications, MESA, Oulu, Finland, July 2018.
[15] B. K. Post and W. J. Book, “A robust nonlinear
observationstrategy for the control of flexible manipulators,”
inProceedings-IEEE International Conference on Robotics
andAutomation, Shangai, China, May 2011.
[16] A. Zuyev and O. Sawodny, “Observer design for a
flexiblemanipulator model with a payload,” in Proceedings-45th
IEEEConference on Decision and Control, San Diego, CA, USA,December
2006.
[17] J. I. Medina Martinez, K. Nakano, and S. Umerujan,
“Vi-bration suppression control of a flexible arm using a
nonlinearobserver with simultaneous perturbation stochastic
approx-imation,” Artificial Life and Robotics, vol. 14, no. 4,pp.
539–544, 2009.
[18] Q. Xu, Z. Jing, and S. Hu, “Stability analysis of
nonlineardynamic system with linear observer for a multilink
flexiblemanipulator,” International Journal of Non-Linear
Mechanics,vol. 103, pp. 27–36, 2018.
[19] R. Caracciolo, D. Richiedei, and A. Trevisani,
“Robustpiecewise-linear state observers for flexible link
mechanisms,”Journal of Dynamic Systems, Measurement, and
Control,vol. 130, no. 3, article 031011, 2008.
[20] R. Caracciolo, D. Richiedei, and A. Trevisani, “Design
andexperimental validation of piecewise-linear state observers
forflexible link mechanisms,” Meccanica, vol. 41, no. 6,pp.
623–637, 2006.
[21] B. Besselink, U. Tabak, A. Lutowska et al., “A comparisonof
model reduction techniques from structural dynamics,numerical
mathematics and system and control,” Journalof Sound and Vibration,
vol. 332, no. 19, pp. 4403–4422,2013.
[22] M. Bampton and R. Craig, “Coupling of substructures
fordynamic analyses,” AIAA Journal, vol. 6, no. 7, pp.
1313–1319,1968.
[23] R. Vidoni, P. Gallina, P. Boscariol, A. Gasparetto, andM.
Giovagnoni, “Modeling the vibration of spatial flexiblemechanisms
through an equivalent rigid-link system/component mode synthesis
approach,” Journal of Vibrationand Control, vol. 23, no. 12, pp.
1890–1907, 2017.
[24] S. Boer, R. Aarts, J. Meijaard, D. Brouwer, and J. Jonker,
“Atwo node superelement description for modelling offlexible
complex-shared beam-like components,” in Pro-ceedings of ECCOMAS
Multibody Dynamics, Brussels,Belgium, 2011.
[25] I. Palomba, D. Richiedei, and A. Trevisani, “A
reductionstrategy at system level for flexible link multibody
systems,”International Journal of Mechanics and Control, vol. 18,
no. 2,pp. 59–68, 2017.
[26] I. Palomba, D. Richiedei, and A. Trevisani, “Mode
selectionfor reduced order modeling of mechanical systems excited
atresonance,” International Journal of Mechanical Sciences,vol.
114, pp. 268–276, 2016.
[27] M. S. Grewal and A. P. Andrews,Kalman Filtering:9eory
andPractice with MATLAB, John Wiley & Sons, Hoboken, NJ,USA,
2014.
[28] S. M. Kim, J.-G. Kim, K. C. Park, and S.-W. Chae,
“Acomponent mode selection method based on a consistentperturbation
expansion of interface displacement,” ComputerMethods in Applied
Mechanics and Engineering, vol. 330,pp. 578-579, 2018.
[29] I. Palomba, D. Richiedei, and A. Trevisani,
“Energy-basedoptimal ranking of the interior modes for
reduced-ordermodels under periodic excitation,” Shock and
Vibration,vol. 2015, Article ID 348106, 10 pages, 2015.
12 Shock and Vibration
-
International Journal of
AerospaceEngineeringHindawiwww.hindawi.com Volume 2018
RoboticsJournal of
Hindawiwww.hindawi.com Volume 2018
Hindawiwww.hindawi.com Volume 2018
Active and Passive Electronic Components
VLSI Design
Hindawiwww.hindawi.com Volume 2018
Hindawiwww.hindawi.com Volume 2018
Shock and Vibration
Hindawiwww.hindawi.com Volume 2018
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawiwww.hindawi.com Volume 2018
Hindawiwww.hindawi.com Volume 2018
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawiwww.hindawi.com
Volume 2018
Hindawi Publishing Corporation http://www.hindawi.com Volume
2013Hindawiwww.hindawi.com
The Scientific World Journal
Volume 2018
Control Scienceand Engineering
Journal of
Hindawiwww.hindawi.com Volume 2018
Hindawiwww.hindawi.com
Journal ofEngineeringVolume 2018
SensorsJournal of
Hindawiwww.hindawi.com Volume 2018
International Journal of
RotatingMachinery
Hindawiwww.hindawi.com Volume 2018
Modelling &Simulationin EngineeringHindawiwww.hindawi.com
Volume 2018
Hindawiwww.hindawi.com Volume 2018
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawiwww.hindawi.com Volume 2018
Hindawiwww.hindawi.com Volume 2018
Navigation and Observation
International Journal of
Hindawi
www.hindawi.com Volume 2018
Advances in
Multimedia
Submit your manuscripts atwww.hindawi.com
https://www.hindawi.com/journals/ijae/https://www.hindawi.com/journals/jr/https://www.hindawi.com/journals/apec/https://www.hindawi.com/journals/vlsi/https://www.hindawi.com/journals/sv/https://www.hindawi.com/journals/ace/https://www.hindawi.com/journals/aav/https://www.hindawi.com/journals/jece/https://www.hindawi.com/journals/aoe/https://www.hindawi.com/journals/tswj/https://www.hindawi.com/journals/jcse/https://www.hindawi.com/journals/je/https://www.hindawi.com/journals/js/https://www.hindawi.com/journals/ijrm/https://www.hindawi.com/journals/mse/https://www.hindawi.com/journals/ijce/https://www.hindawi.com/journals/ijap/https://www.hindawi.com/journals/ijno/https://www.hindawi.com/journals/am/https://www.hindawi.com/https://www.hindawi.com/

![Research Article Controllability and Observability of ...fractional dynamical systems by using xed point theorem. In recent paper [ ], necessary and su cient conditions of ... controllability](https://img.pdfslide.net/doc/110x75/609eadc79e5ea943eb627713/research-article-controllability-and-observability-of-fractional-dynamical-systems.jpg)