Embed Size (px)
Citation preview

57
REFERENCES
[1]. Available from: http://www.thermosl.com [Accessed on 12 November 2008]
[2]. Available from: http://www.bamholdings.com/index.htm [Accessed on 12
November 2008]
[3]. I. Thomas and E. D. Butler. “Film Extrusion Manual: Process, Materials,
Properties. 2nd Edition”, 2005.
[4]. Available from:
http://plastics.turkavkaz.ru/processes/extrusion/blown-film-extrusion/
[Accessed on 12 November 2008]
[5]. I. A. Muslet and M. R. Kamal, “Computer Simulation of the Film Blowing
Process Incorporating Crystallization and Viscoelasticity”, Journal of Rheology,
vol. 48, Issue 3, pp. 525-534, 2004.
[6]. V. Sidiropoulos, J. J. Tian and J. Vlachopoulos, “Computer Simulation of Film
Blowing”, Journal of Plastic Film & Sheeting. vol. 12, no. 2, pp. 107-129, 1996.
[7]. S. Brown, F. Chance, J. W. Fowler and J. Robinson, “A Centralized Approach
to Factory Simulation”, Future Fab International, 1997.
[8]. M. Graul, F. Boydstun, M. Harris, R. Mayer and O. Bagaturova, “Integrated
Framework for Modeling & Simulation of Complex Production Systems”,
Knowledge Based Systems, Inc, 2003.
[9]. X. L. Luo and R. I. Tanner, “A Computer Study of Film Blowing”, Article,
2005.
[10]. M. Schumann, E. Bluemel, T. Schulze, S. Strassburger and K. C. Ritter, “Using
HLA for Factory Simulation”, Fall Simulation Interoperability Workshop, 1998.

58
[11]. J. O. Henriksen, “An introduction to SLX”, The Winter Simulation Conference,
pp. 559-566, 1997.
[12]. K. C. Ritter, “Skopeo-Animation”, http://simos2.cs.uni-magdeburg.de/skopeo/
[Accessed on 05 July 2008]
[13]. B. V. Babu, “Process Plant Simulation”, OXFORD university press, 2004.
[14]. A. N. Wilkinson and A. J. Royan, “Polymer Processing & Structure
Development”.
[15]. Available from: http://www.arenasimulation.com/ [Accessed on 11 November
2008]
[16]. Available from: http://www.traininteractive.com/sim/ [Accessed on 11
November 2008]
[17]. Available from: http://www.flexsim.com/ [Accessed on 02 October 2008]
[18]. Available from: http://www.fabsim.com/about.html [Accessed on 12 November
2008]
[19]. Available from: http://www.mathworks.com/products/ [Accessed on 10
November 2008]
[20]. Harvard Business School Press, “SWOT Analysis II: Looking Inside for
Strengths and Weaknesses”, Digital book chapter, 2008.
[21]. Available from: http://en.wikipedia.org/wiki/Swot_analysis [Accessed on 12
November 2008]
[22]. J. Wang, “Process Bottleneck Analysis and Production Scheduling of Process
Industry”. PhD Dissertation, Tsinghua University, Beijing, China, 2008.

59
[23]. R. A. R. C. Gopura and T. S. S. Jayawardene, “Risk and Bottleneck Analysis of
Poly Bag Manufacturing Factory”, 14th ERU symposium of University of
Moratuwa, pp. 127-128, 2008.

60
APPENDIX – A
PROCESS FLOW CHART

61

62

63

64
APPENDIX – B
BLOWN FILM EXTRUDER
B.1 Blown Film Extruder Unit

65
B.2 Technical Specifications Technical specifications of blown film extruder unit abstract of the manual are given below.
.

66
APPENDIX – C
SIMULATION
C.1 What is simulation
A simulation is the imitation of the operation of a real-world process or system over
time. Whether done by hand or on a computer, simulation involves the generation of
an artificial history of a system, and the observation of that artificial history to draw
inferences concerning the operating characteristics of the real system. To carry out a
simulation, a model is essential.
C.2 Why simulation is needed
The necessity of simulation can be stipulated as follows.
1. Assumptions used for modelling do not hold
2. Generalizations are mathematically very complex
3. Uncertainty in data and unknown or missing value of data
C.3 Pros and cons of simulation
The general advantages and disadvantages of simulation method can be stated as
follows:
C.3.1. Advantages
1. Simulation allows us to study the behaviour of complex and dynamic systems,
often when analytical methods are impractical or impossible
2. Simulation allows experimentation in situations where it may be
impracticable, impossible, too expensive or too disruptive to experiment with
the real system

67
3. Simulation allows experimentation over any period of time, i.e., days, months,
years to determine long term effects of operating policies in a physically
shorter period (simulation allows for the compression of real time)
4. By simulating the system, the scientist gains valuable insight into the system
and into the relative importance of the different variables
5. Simulation provides convenient repeatability and scalability
C.3.2 Disadvantages
1. Simulation is not an optimization process -- it does not provide an answer: it
provides a set of system responses under different operating conditions
2. Simulation provides a framework for evaluating solutions but not the solutions
themselves
3. Simulation is an expensive procedure: in model formulation, building,
validating and systematic experimentation
4. Simulation may produce erroneous indications due to sampling errors,
insufficient experimentation times (i.e., non steady-state) longer and more
sophisticated simulations increase costs
C.4 Basics of simulation
Simulation systems can be basically divided into two categories namely system
simulation where simulate a sequence of events over time, to determine how a
system performs and Monte Carlo Simulation where sampling experiment for
estimating the distribution of an outcome that depends on several probabilistic
inputs. A stochastic system is a system that evolves over time according to one or

68
more probability distributions and for such systems Monte Carlo sampling is used.
Some systems are a combination of above two types.
Computer simulation imitates the operation of such a system by using the
corresponding probability distributions to randomly generate the various events
that occur in the system. This is achieved through inverse transformation method.
Rather than literally operating a physical system, the computer just records the
occurrences of the simulated events and the resulting performance of the system.
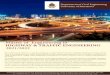
C.5 Inverse Transformation Method
The method for generating random observations from a continuous distribution is
called the inverse transformation method.
1. Generate a random number r.
2. Find the value of x such that F(x) = r where F(x) is a cumulative
distribution function of random variable x. This value of x is the
desired random observation from the probability distribution. (See Fig.
C.1)
Fig. C.1 Inverse transformation
r = 0.5271
0
1
F(x)
xRandom observation

69
C.6 Steps of Simulation
Step 1: Formulate the Problem and Plan the Study
Step 2: Collect the Data and Formulate the Simulation Model
Step 3: Check the Accuracy of the Simulation Model
Step 4: Select the Software and Construct a Computer Program
Classes of software
• Spreadsheet software (e.g., Excel, Crystal Ball)
• A general purpose programming language (e.g., C, FORTRAN, Pascal,
etc.)
• A general purpose simulation language (e.g., GPSS, SIMSCRIPT, SLAM,
SIMAN)
• Applications-oriented simulators
Step 5: Test the Validity of the Simulation Model
Step 6: Plan the Simulations to Be Performed
Step 7: Conduct the Simulation Runs and Analyze the Results
Step 8: Interpret results, draw conclusions and make the recommendations

70
APPENDIX – D
MATLAB COMMANDS OF MAIN WINDOW
MATLAB command file (PolySim.m file) of the main window (PolySim window) of
GUIs is given in bellow. The relevant figure named PolySim is the Fig. 7.3 in page 49.
function varargout = PolySim(varargin)
% POLYSIM M-file for PolySim.fig
% POLYSIM, by itself, creates a new POLYSIM or raises the existing
% singleton*.
%
% H = POLYSIM returns the handle to a new POLYSIM or the handle to
% the existing singleton*.
%
% POLYSIM('CALLBACK',hObject,eventData,handles,...) calls the
local
% function named CALLBACK in POLYSIM.M with the given input arguments.
%
% POLYSIM('Property','Value',...) creates a new POLYSIM or raises the
% existing singleton*. Starting from the left, property value pairs
are
% applied to the GUI before PolySim_OpeningFunction gets called. An
% unrecognized property name or invalid value makes property
application
% stop. All inputs are passed to PolySim_OpeningFcn via varargin.
%
% *See GUI Options on GUIDE's Tools menu. Choose "GUI allows only
one
% instance to run (singleton)".
%
% See also: GUIDE, GUIDATA, GUIHANDLES
% Edit the above text to modify the response to help PolySim
% Last Modified by GUIDE v2.5 29-Nov-2008 04:23:24

71
% Begin initialization code - DO NOT EDIT
gui_Singleton = 1;
gui_State = struct('gui_Name', mfilename, ...
'gui_Singleton', gui_Singleton, ...
'gui_OpeningFcn', @PolySim_OpeningFcn, ...
'gui_OutputFcn', @PolySim_OutputFcn, ...
'gui_LayoutFcn', [] , ...
'gui_Callback', []);
if nargin && ischar(varargin{1})
gui_State.gui_Callback = str2func(varargin{1});
end
if nargout
[varargout{1:nargout}] = gui_mainfcn(gui_State, varargin{:});
else
gui_mainfcn(gui_State, varargin{:});
end
% End initialization code - DO NOT EDIT
% --- Executes just before PolySim is made visible.
function PolySim_OpeningFcn(hObject, eventdata, handles, varargin)
% This function has no output args, see OutputFcn.
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% varargin command line arguments to PolySim (see VARARGIN)
% Choose default command line output for PolySim
handles.output = hObject;
% Update handles structure
guidata(hObject, handles);
% UIWAIT makes PolySim wait for user response (see UIRESUME)
% uiwait(handles.figure1);
% --- Outputs from this function are returned to the command line.

72
function varargout = PolySim_OutputFcn(hObject, eventdata, handles)
% varargout cell array for returning output args (see VARARGOUT);
% hObject handle to figure
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% Get default command line output from handles structure
varargout{1} = handles.output;
% -------------------------------------------------------------------
function input_Callback(hObject, eventdata, handles)
% hObject handle to input (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% -------------------------------------------------------------------
function sim_Callback(hObject, eventdata, handles)
% hObject handle to sim (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
%--------------------------------------------------------------------
function out_Callback(hObject, eventdata, handles)
% hObject handle to out (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% -------------------------------------------------------------------
function help_Callback(hObject, eventdata, handles)
% hObject handle to help (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% -------------------------------------------------------------------
function load_Callback(hObject, eventdata, handles)
% hObject handle to load (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)

73
% -------------------------------------------------------------------
function edit_Callback(hObject, eventdata, handles)
% hObject handle to edit (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% -------------------------------------------------------------------
function order_Callback(hObject, eventdata, handles)
% hObject handle to order (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% -------------------------------------------------------------------
function exit_Callback(hObject, eventdata, handles)
% hObject handle to exit (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
exit;
% -------------------------------------------------------------------
function Ssys_Callback(hObject, eventdata, handles)
% hObject handle to Ssys (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
global ka;global kb;global wa;global wb;global pa;global pb;global Fbm;
global zd;global ze;global ca;global cb;global alpha;global k;global x;
global bagg;global bagl;global bagw;global printl;global feedl;
global np;global Nr;
global wpe;global Tsc;
global ppl;global epl;global cph;global p;global gauge;
p=1; gauge=150;
fid=fopen('Parameters.txt', 'r');
b=fscanf(fid, '%f %f',inf);
fclose(fid);
ka=b(1,1);
kb=b(2,1);
pa=b(3,1);

74
pb=b(4,1);
Fbm=b(5,1);
wa=b(6,1);
wb=b(7,1);
ze=b(8,1);
alpha=b(9,1);
zd=b(10,1);
ca=b(11,1);
cb=b(12,1);
np=b(13,1);
Nr=b(14,1);
k=b(15,1);
x=b(16,1);
bagg=b(17,1);
bagl=b(18,1);
bagw=b(19,1);
printl=b(20,1);
feedl=b(21,1);
if (gauge==bagg)
Tsc=0.8;
else
Tsc=0.7;
end
if (p==k)
epl=ka;%epl-extrusigaon time per length
wpe=wa;%wp-waste percentage-extrusion
cph=ca;%cph-constant of proportionality-handling
else
epl=kb;
wpe=wb;
cph=cb;
end
if (p==x)
ppl=pb;%ppl-printing time per length
else

75
ppl=pb;
end
ext_time=epl*(1+wpe/100)*bagl;
pri_time =ppl*printl;
bag_time = (Fbm*feedl)+ Tsc;
qc_time =(ze*bagl*bagw)/10000+(zd*bagl*bagw*alpha)/100;
hand_time = (cph*bagl*bagw*np)/10000+(0.2*bagl*bagw)/(24*42)+12/60;
print_delay=((Nr-1)*ext_time)/2;
min_time=(ext_time+pri_time+bag_time+qc_time+hand_time+print_delay);
y=[ext_time pri_time bag_time qc_time hand_time print_delay min_time];
fid = fopen('System Simulation Results.txt', 'wt');
fprintf(fid,'%6.3f %12.8f\n',y);
fclose(fid);
System;
% -------------------------------------------------------------------
function Smonte_Callback(hObject, eventdata, handles)
% hObject handle to Smonte (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
global r1;global r2;global r3;global m;global n;
m=0; n=99;
r1=round(unifrnd(m,n));
r2=round(unifrnd(m,n));
r3=round(unifrnd(m,n));
if (r1>=0 & r1<=29)
op_print_delay=0;
elseif(r1>=30 & r1<=54)
op_print_delay=1*24*60;
elseif(r1>=55 & r1<=74)
op_print_delay=2*24*60;

76
elseif(r1>=75 & r1<=89)
op_print_delay=3*24*60;
else
op_print_delay=4*24*60;
end
if (r2>=0 & r2<=4)
bag_delay=0;
elseif(r2>=5 & r2<=19)
bag_delay=1*24*60;
elseif(r2>=20 & r2<=44)
bag_delay=2*24*60;
elseif(r2>=45 & r2<=64)
bag_delay=3*24*60;
elseif(r2>=65 & r2<=79)
bag_delay=4*24*60;
elseif(r2>=80 & r2<=89)
bag_delay=5*24*60;
elseif(r2>=90 & r2<=95)
bag_delay=6*24*60;
else
bag_delay=7*24*60;
end
if (r3>=0 & r3<=23)
qc_delay=0;

77
elseif(r3>=24 & r3<=55)
qc_delay=1*24*60;
elseif(r3>=56 & r3<=76)
qc_delay=2*24*60;
elseif(r3>=77 & r3<=87)
qc_delay=3*24*60;
elseif(r3>=88 & r3<=95)
qc_delay=4*24*60;
else
qc_delay=5*24*60;
end
y=[op_print_delay bag_delay qc_delay];
fid = fopen('Monte Carlo Results.txt', 'wt');
fprintf(fid,'%6.3f %12.8f\n',y);
fclose(fid);
x=[r1 r2 r3];
fid = fopen('Random Numbers.txt', 'wt');
fprintf(fid,'%6.3f %12.8f\n',x);
fclose(fid);
Monte_Carlo;
% -------------------------------------------------------------------
function Ssched_Callback(hObject, eventdata, handles)
% hObject handle to Ssched (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% -------------------------------------------------------------------
function Osys_Callback(hObject, eventdata, handles)
% hObject handle to Osys (see GCBO)

78
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
Results_System_Simulation;
% -------------------------------------------------------------------
function Omonte_Callback(hObject, eventdata, handles)
% hObject handle to Omonte (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
Results_Monte_Carlo_Simulation;
% -------------------------------------------------------------------
function Osched_Callback(hObject, eventdata, handles)
% hObject handle to Osched (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% -------------------------------------------------------------------
function online_Callback(hObject, eventdata, handles)
% hObject handle to online (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% -------------------------------------------------------------------
function about_Callback(hObject, eventdata, handles)
% hObject handle to about (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% --- Executes on button press in run.
function run_Callback(hObject, eventdata, handles)
% hObject handle to run (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% --- Executes on button press in display.
function display_Callback(hObject, eventdata, handles)
% hObject handle to display (see GCBO)

79
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
% -------------------------------------------------------------------
function montesys_Callback(hObject, eventdata, handles)
% hObject handle to montesys (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)
Results_Monte_System_Simulation;
% -------------------------------------------------------------------
function h_Callback(hObject, eventdata, handles)
% hObject handle to h (see GCBO)
% eventdata reserved - to be defined in a future version of MATLAB
% handles structure with handles and user data (see GUIDATA)