Embed Size (px)
Citation preview

Reihaneh Rostami, Zeyun YuComputer Science DepartmentUniversity of Wisconsin – Milwaukee
3D Point Matching
Objective
- 3D Point Matching is the process of finding a point to point correspondence between meshes.
- Correspondence is essential for: - Modeling- Registration- Reconstruction- Object recognition- Data retrieval

ApproachPreprocessing: - Translation, Orientation, and Scale- Mesh smoothingStep 1:Initial alignment by applying Thin Plate Spline (TPS)
: Homogeneous coordinates of the point on source mesh and : affine and non-affine transformations respectively
= : matrix () and : Coefficients of control points on source and target meshes, respectively : the number of control pointsStep 2:Point to point correspondence are found, iteratively. An intersection point on the target mesh along norm direction of the source points are computed.
: weight : Intersection with the target mesh along point ’s normal : points of source mesh

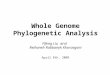
Results
d. Source e. Result f. Target
b. After TPS (step 1)a. Selecting control points c. Last iteration (step 2before copying the texture)
Preprocessing
Steps 1 and 2
ICP only
Future Work:- Landmarks being selected
automatically.- Spectral embedding to be
used.
Future work