Embed Size (px)
Citation preview

Reinforcement Learning (1)
Bob DurrantSchool of Computer Science
University of Birmingham
(Slides: Dr Ata Kabán)

• Learning by reinforcement• State-action rewards• Markov Decision Process• Policies and Value functions• Q-learning
Reinforcement Learning (1)

Learning by reinforcement
• Examples:– Learning to play Backgammon– Robot learning to dock on battery charger
• Characteristics:– No direct training examples – delayed rewards instead– Need for exploration & exploitation– The environment is stochastic and unknown– The actions of the learner affect future rewards

Reinforcement Learning
Supervised Learning

Brief history & successes
• Minsky’s PhD thesis (1954): Stochastic Neural-Analog Reinforcement Computer
• Analogies with animal learning and psychology • TD-Gammon (Tesauro, 1992) – big success story• Job-shop scheduling for NASA space missions (Zhang and
Dietterich, 1997)• Robotic soccer (Stone and Veloso, 1998) – part of the world-
champion approach• ‘An approximate solution to a complex problem can be better
than a perfect solution to a simplified problem’

The RL problem
States
Actions
Immediate rewards
Eventual reward
Discount factor
from any starting state

Markov Decision Process (MDP)
• MDP is a formal model of the RL problem• At each discrete time point
– Agent observes state st and chooses action at
– Receives reward rt from the environment and the state changes to st+1
• Markov assumption: rt=r(st,at) st+1=(st,at)i.e. rt and st+1 depend only on the current state and action– In general, the functions r and may not be deterministic
and are not necessarily known to the agent
s

Agent’s Learning Task
Execute actions in environment, observe results and• Learn action policy that maximises
from any starting state in S.Here is the discount factor for future rewards
• Note: • Target function is • There are no training examples of the form (s,a) but
only of the form ((s,a),r)
AS :...][ 2
21 ttt rrrE
10
AS :

Example: TD-Gammon
• Immediate reward:+100 if win-100 if lose0 for all other states
• Trained by playing 1.5 million games against itself• Now approximately equal to the best human player

Example: Mountain-Car
• States: position and velocity• Actions: accelerate forward, accelerate backward, coast• Rewards
– Reward=-1for every step, until the car reaches the top– Reward=1 at the top, 0 otherwise, <1
• The eventual reward will be maximised by minimising the number of steps to the top of the hill

Value function
We will consider deterministic worlds first• Given a policy (adopted by the agent), define
an evaluation function over states:
• Property:
02
21 ...)(
iit
itttt rrrrsV
)(
...)()(
1
21
tt
tttt
sVr
rrrsV
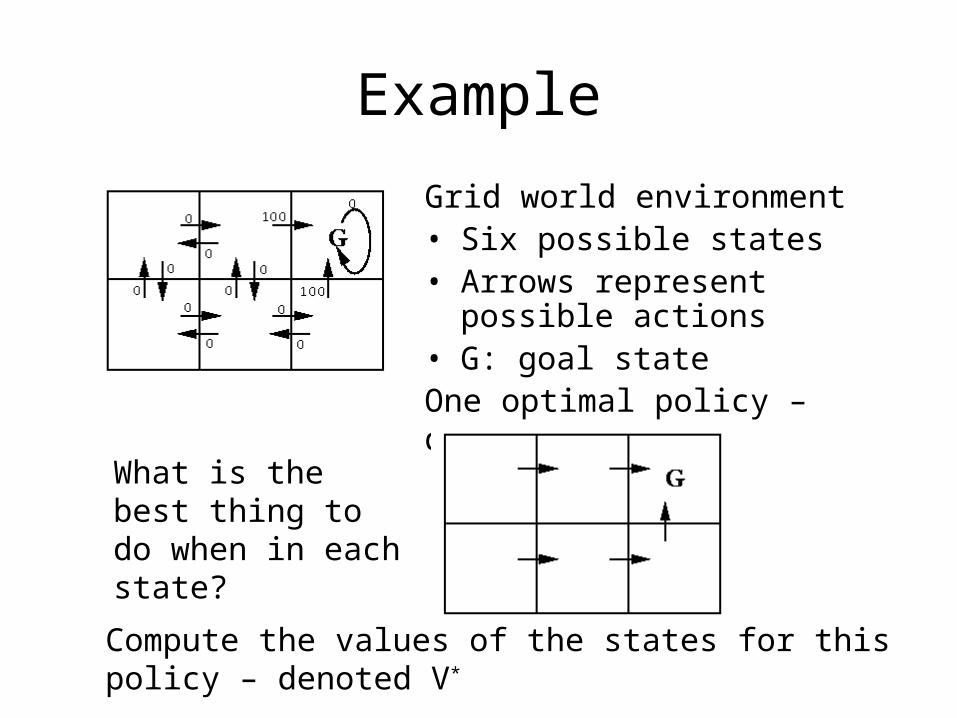
Example
Grid world environment• Six possible states• Arrows represent possible
actions• G: goal stateOne optimal policy – denoted *
What is the best thing to do when in each state?
Compute the values of the states for this policy – denoted V*

r(s,a) (immediate reward) values: V*(s) values, with =0.9
one optimal policy:
V*(s6) = 100 + 0.9*0 = 100
V*(s5) = 0 + 0.9*100 = 90
V*(s4) = 0 + 0.9*90 = 81
Restated, the task is to learn the optimal policy
)(),(maxarg* ssV
)( )( 1**
ttt sVrsV

The task, revisited
• We might try to have the agent learn the evaluation function V*
• It could then do a look ahead search to chose the best action from any state using
… yes, if we knew both the transition function and the reward function r. In general these are unknown to the agent, so it cannot choose actions this way
• BUT: there is a way to do it!!
))},((),({maxarg)( ** asVasrsa

Q function
• Define a new function very similar to V*
• What difference does this make?• If the agent learns Q, then it can choose the
optimal actions even without knowing • Let us see how.
)),((),(),( * asVasrasQ

)),((),(),( * asVasrasQ • Rewrite things replacing this new definition:
• Now, let denote the agent’s current approximation to Q. Consider the iterative update rule. Under some assumptions (<s,a> visited infinitely often), this will converge to the true Q:
),(max),(
)),((),(),(
:yrecursivel Q rewrite tous allows This
),(max)(
),(maxarg
))},((),({maxarg)(
1
*
*
**
asQasr
asVasrasQ
asQsV
asQ
asVasrs
ta
tt
tttttt
a
a
a
Q̂
)),,((ˆmax),(:),(ˆ aasQasrasQa

Q Learning algorithm (in deterministic worlds)
• For each (s,a) initialise table entry• Observe current state s• Do forever:
– Select an action a and execute it– Receive immediate reward r– Observe new state s’– Update table entry as follows:
– s:=s’
0:),(ˆ asQ
)),,((ˆmax:),(ˆ aasQrasQa

Example updating Q
90
}100,81,63max{9.00
)',(ˆmax:),(ˆ2
'1
asQrrightsQa
given the Q values from a previous iteration on the arrows

Sketch of the convergence proof of Q-learning
• Consider the case of deterministic world, where each (s,a) is visited infinitely often.
• Define a full interval as an interval during which each (s,a) is visited. It can be easily shown, that during any such interval, the absolute value of the largest error in table is reduced by a factor of .
• Consequently, as <1, then after infinitely many updates, the largest error converges to zero.
• Go through the details from [Mitchell, sec. 13.3,6.]
Q̂

An Observation
• As a consequence of the convergence proof, Q-learning need not train on optimal action sequences in order to converge to the optimal policy. It can learn the Q function (and hence the optimal policy) while training from actions chosen at random as long as the resulting training sequence visits every ordered (state, action) pair infinitely often.

Exploration versus Exploitation• The Q-learning algorithm doesn’t say how we could
choose an action• If we choose an action that maximises our estimate of Q
we could end up not exploring better alternatives• To converge on the true Q values we must favour higher
estimated Q values but still have a chance of choosing worse estimated Q values for exploration (see the convergence proof of the Q-learning algorithm in [Mitchell, sec. 13.3.4.]). An action selection function of the following form may employed, where k>0:
'
),(ˆ
),(ˆ
'
)|(
k
asQ
asQ
kk
k
k
ksaP

Nondeterministic case• What if the reward and the state transition are not
deterministic? – e.g. in Backgammon learning and playing depends on rolls of dice!
• Then V and Q need to be redefined using their expected values:
• Similar reasoning and convergent update iteration will apply• Will continue next week.
))],((),([),(
][...][)(
*
02
21
asVasrEasQ
rErrrEsVi
iti
ttt

Summary
• Reinforcement learning is suitable for learning in uncertain environments where rewards may be delayed and subject to chance
• The goal of a reinforcement learning program is to maximise the eventual reward
• Q-learning is a form of reinforcement learning that doesn’t require that the learner has prior knowledge of how its actions affect the environment