Embed Size (px)
Citation preview

Relation between Spatial Concepts and Geographic
Objects

Geographic Knowledge Very complex Single out particular aspects of current
interest Make explicit certain aspects we ignore
others Concerned only in a few objects
Regard only particular properties and/or relations of these objects
Leads to a unique knowledge efficiency
World And User Geographic Information System (GIS) Development possibilities:
Acquire and store all knowledge from raw information once and for all before the knowledge is accessed
Provide unprocessed raw information and compute specific knowledge on demand
Too extreme!!! Solution: find adequate compromise
between these two possibilities

Space
When we speak about space, we refer to notions of location, orientation, shape, size (height, width, length and their combination), connection, distance, neighborhood, etc.
Properties Of Real Space Which properties of the real world do we
want to maintain? Universal domain properties Properties related to the physics of space Properties related to the neighborhood of
spatial relations Avoid to represent all the knowledge
Concentrate on the problem we have to solve and abstract from all other knowledge.
Exclude a range of items, which we will never consider.

Qualitative Knowledge Much of the knowledge about time and
space is qualitative in nature. “Mental images” that we retrieve from
our memory are qualitative: Absolute locations, wavelengths, and
intensities cannot be retrieved from memory.
Quantitative knowledge can be represented by measuring qualitative knowledge
Qualitative knowledge is robust under transformations.

Qualitative Knowledge Most qualitative relations act as constraints, which leave
quite a bit of freedom as to the actual quantitative values possible to satisfy the constraints
Some qualitative constraints are as informative as quantitative ones.
Examples: a is smaller than b
Satisfied by a very large number of quantities a, given a certain value for b
a equals b constrains the quantity of a to the single value of b
k is perpendicular to l constrains the orientation of a directed path in a 2-
dimensional domain to exactly two possible values.

Qualitative Spatial Reasoning Using Orientation and Path Knowledge

Spatial Reasoning Spatial and directional information
about the environment comes from: Perception Motion
Drawback: This information is imprecise, partial, and subjective Solution: Combine and integrate multiple
observations into a representation with increasing precision.

Localization task Walk straight along a road Turn to the right Walk straight Turn left Walk straight again
Would like to know where you are located?
How to represent it?

Representation Goals
The representation should be simple and extendable.
The formalism should allow for different levels of granularity, both in the representation and in the choice of operations.
The approach should resemble some fundamental properties of human spatial reasoning and should be plausible from a cognitive point of view.
Representation Consider a person walking from point a to
point b. On his way, he is observing point c. He wants to relate point c to the route segment he is walking on, the vector ab.
Make the qualitative distinction whether c is to the left or to the right of the line going through a and b.
Whether c is beyond or behind a and b when traveling along the vector ab.
Easy to obtain while following a path or being at its end points.
If it is not possible to decide whether c is behind or in front of b
Disjunction of several possible relations

Representation
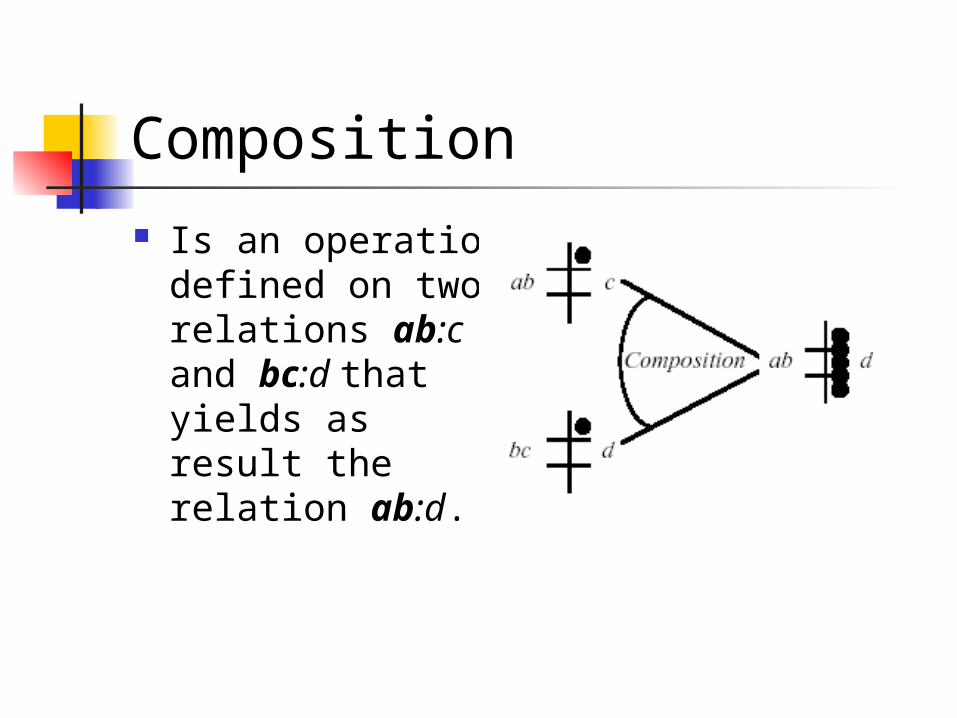
Composition Is an operation
defined on two relations ab:c and bc:d that yields as result the relation ab:d.
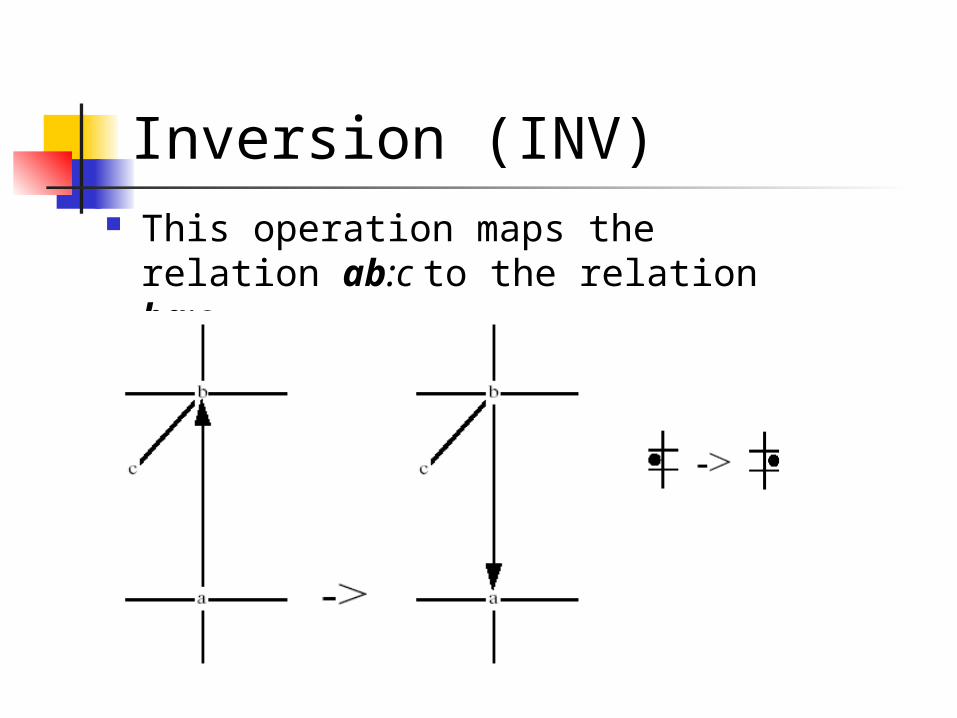
Inversion (INV) This operation maps the relation ab:c
to the relation ba:c

Homing (HM) Maps the relation ab:c to bc:a
Where we have come from when proceeding from location b to location c

Example HMI: INVERSE applied to the result
of HOMING
Path Knowledge
Dynamic component: motion Can be used for way finding and route
planning Two levels of representation
A disjunction of equally possible sequences
Underlying sequences themselves

Path Representation States inside the sequence are separated
by semi-colons Each sequence is enclosed by square
brackets Different intermediate states the mover will
enter on his path from one location to the next The sequences are grouped by curly
brackets and form an exclusive disjunction Only one of them may be chosen

Example Static representation: c is on the
right back of vector a b One relation
Dynamic representation: transformed into the sequence of intermediate relations depicting the path from b to c.
References B. Berendt, T. Barkowsky, C. Freksa, S. Kelter (1998). Spatial representation with
aspect maps. In C. Freksa, C. Habel, K. F. Wender (Eds.), Spatial Cognition I - An interdisciplinary approach to representing and processing spatial knowledge, pp. 313–336. Springer, Berlin.
C. Freksa (1997). Spatial and temporal structures in cognitive processes. In C. Freksa, M. Jantzen, R. Valk (Eds.), Foundations of Computer Science. Potential -- Theory -- Cognition, pp. 379–387. Springer, Berlin.
S. Werner, B. Krieg-Brьckner, H.A. Mallot, K. Schweizer, C. Freksa (1997). Spatial cognition: the role of landmark, route, and survey knowledge in human and robot navigation. In M. Jarke, K. Pasedach, K. Pohl (Eds.), Informatik 97, pp. 41–50. Berlin, Heidelberg, New York, Springer.
C. Freksa, T. Barkowsky (1996). On the relation between spatial concepts and geographic objects. In P. Burrough, A. Frank A (Eds.), Geographic objects with indeterminate boundaries, pp. 109–121. Taylor and Francis, London.
Christian Freksa (1991). Qualitative spatial reasoning. In DM. Mark, AU. Frank (Eds.), Cognitive and linguistic aspects of geographic space, pp. 361–372. Kluwer, Dordrecht.

















![UMDA Syntagmatic-Paradigmatic model specifies two relation types among objects: syntagmatic and paradigmatic [6]. Syntagmatic relations involve items belonging to different categories](https://img.pdfslide.net/doc/110x75/60bbc9db69936539c64cb9ad/a-syntagmatic-paradigmatic-model-specifies-two-relation-types-among-objects-syntagmatic.jpg)