Embed Size (px)
Citation preview

. . . . . .
Introduction Infinite Ergodic Theory Deterministic Subdiffusion Conclusion
Relationship between dynamicalinstability and transport coefficient in
anomalous subdiffusion
Takuma Akimoto
Keio university, 3-14-1 Hiyoshi Kohoku-ku Yokohama, Kanagawa223-8522, Japan
July, 15, 2011

. . . . . .
Introduction Infinite Ergodic Theory Deterministic Subdiffusion Conclusion
Outline
Introduction
Infinite Ergodic Theory
Deterministic Subdiffusion
Conclusion

. . . . . .
Introduction Infinite Ergodic Theory Deterministic Subdiffusion Conclusion
Equilibrium and non-equilibrium states
• Equilibrium state (dT = 0)
• Non-equilibrium steady state (0 < dT < Tc)- conduction
• Non-equilibrium non-steady state (Tc < dT )- turbulence- approach to an equilibrium (dT = 0, T → T ′)
T + dT
T
fluid

. . . . . .
Introduction Infinite Ergodic Theory Deterministic Subdiffusion Conclusion
Key fact in statistical mechanics
• Equilibrium state: intensive macroscopic observables,such as temperature and density, do not depend on a partof a system
• Non-equilibrium steady state: intensive macroscopicobservables, such as temperature and density, depend on apart of system
• Non-equilibrium non-steady state: macroscopicobservables are intrinsically random
Key fact
Macroscopic observables result from the time averages ofmicroscopic observation functions

. . . . . .
Introduction Infinite Ergodic Theory Deterministic Subdiffusion Conclusion
Equilibrium and non-equilibrium states in dynamicalsystems
• Equilibrium state: time average does not depend on apart i of a system
1
n
n−1∑k=0
fi ◦ T k → 〈f〉 as n → ∞
• Non-equilibrium steady state: time average exists butdepend on a part i of a system
1
n
n−1∑k=0
fi ◦ T k → 〈fi〉 as n → ∞
• Non-equilibrium non-steady (non-stationary) state:time average is random (converge in distribution)
1
an
n−1∑k=0
f ◦ T k L→〈f〉 as n → ∞

. . . . . .
Introduction Infinite Ergodic Theory Deterministic Subdiffusion Conclusion
Ergodicity in non-equilibrium non-stationary state
• Deterministic diffusion, T : R → RAlthough an invariant measure of T (x) can not be normalized(infinite measure), the reduced map of T (x), R(x), has aprobability measure.
0 1 2
1
2
3
x
T(x) 1
0 1
R(x
)
x

. . . . . .
Introduction Infinite Ergodic Theory Deterministic Subdiffusion Conclusion
Distributional limit theorem in diffusion process
Distribution of occupation times [D. A. Darling and M.Kac (1957)]Let x(t) be the two dimensional Brownian motion, x(0) = 0, and letV (x) be the characteristic function of a bounded plane set B ofnonzero Lebesgue measure.
limt→∞
Pr
{C
ln t
∫ t
0
V (x(τ ))dτ < x
}= 1 − e−x.
In a general Markoff process,
limt→∞
Pr
{C
tα
∫ t
0
V (x(τ ))dτ < x
}= Gα(x),
where Gα(x) is the Mittag-Leffler distribution.

. . . . . .
Introduction Infinite Ergodic Theory Deterministic Subdiffusion Conclusion
Random diffusion coefficients in experiments
- I. Golding and E. Cox, PRL, 96, 098102 (2006)- A. Graneli et al., PNAS, 103, 1221 (2006)
Time-averaged mean square displacement (TAMSD)
δx(t)2 ≡1
T − t
∫ T−t
0
[x(t′ + t) − x(t′)]2dt′
Diffusion coefficients are intrinsically random.

. . . . . .
Introduction Infinite Ergodic Theory Deterministic Subdiffusion Conclusion
Purpose
Foundation of ergodicity in non-equilibriumnon-stationary phenomena
• Distributional limit theorems in deterministic anomalousdiffusion (Infinite Ergodic theory)
• Relation between dynamical instabilities and transportcoefficients

. . . . . .
Introduction Infinite Ergodic Theory Deterministic Subdiffusion Conclusion
Infinite Ergodic Theory

. . . . . .
Introduction Infinite Ergodic Theory Deterministic Subdiffusion Conclusion
Infinite measure
ergodicity
A dynamical system (T,X,B, µ) is ergodic if
T−1A = A,A ∈ B ⇒ µ(A) = 0 or µ(Ac) = 0
Infinite measure: µ(X) = ∞
• Intermittent map (z ≥ 2)
T (x) =
x + 2z−1xz x ∈ (0, 1/2)
2x − 1 x ∈ (1/2, 1)
ρ(x) ∝ x1−z (x → 0)

. . . . . .
Introduction Infinite Ergodic Theory Deterministic Subdiffusion Conclusion
Distributional limit theorems
Time average of an observation function f(x) converges indistribution:
1
an
n−1∑k=0
f ◦ T k L→Yα as n → ∞.
Distribution of a random varianble Yα
• f ∈ L1+(µ)1: Mittag-Leffler distribution (an ∝ nα)
[J. Aaronson, J. D’Analyse Math. (1981)]
• f /∈ L1(µ): Generalized arc-sine or stable distribution[M. Thaler (1998), M. Thaler and R. Zweimuller (2006), T.Akimoto (2008)]
1f ∈ L1(µ) means∫X
|f |dµ < ∞.

. . . . . .
Introduction Infinite Ergodic Theory Deterministic Subdiffusion Conclusion
Dynamical instability
Lyapunov exponent
λ ≡ limn→
1
n
n−1∑k=0
ln |T ′(xk)| ⇒ ∆x(t) ∼ ∆x(0) exp(λt)
Subexponential instability
∆x(t) ∼ ∆x(0) exp(λαtα)
ln |T ′(x)| ∈ L1+(µ) ⇒ λα is a random variable.
λα(n) ≡1
an
n−1∑k=0
ln |T ′(xk)|L→Mα
[N. Korabel and E. Barkai, PRL (2009), T. Akimoto and Y.Aizawa, Chaos (2010)]

. . . . . .
Introduction Infinite Ergodic Theory Deterministic Subdiffusion Conclusion
Deterministic Subdiffusion

. . . . . .
Introduction Infinite Ergodic Theory Deterministic Subdiffusion Conclusion
Dynamical systems
-2
-1
0
1
2
-1 0 1
T(x)
x
0
0R(x)
x
1/2 -1/2
1/2
-1/2 c -1/4 1/4
Reduced map, R(x) = x + 4z−1xz, x ∈ (0, 1/4), has aninfinite invariant measure µR (z ≥ 2).
c: asymmetric parameter (1/4 ≤ c ≤ 1/2)
c = 0.375 corresponds to an unbiased random walk

. . . . . .
Introduction Infinite Ergodic Theory Deterministic Subdiffusion Conclusion
Consctruction of Continuous Time Random Walk
0
R(x)
x +1 -1 +1 -1
f(x) =
−1 x ∈ (−1/2,−c]+1 x ∈ (−c,−1/4)0 x ∈ [−1/4, 1/4]−1 x ∈ (1/4, c]+1 x ∈ (c, 1/2]

. . . . . .
Introduction Infinite Ergodic Theory Deterministic Subdiffusion Conclusion
Time-averaged mean square displacement
Time-averaged mean square displacement (TAMSD)
δx2m ≡
1
an
n−1∑k=0
(xk+m − xk)2
Because fm(x) ≡ (Tm(x) − x)2 ∈ L1+(µR), we have
1
an
n−1∑k=0
fm ◦ T k L→〈fm〉Mα as n → ∞,
where Mα is a random variable with Mittag-Leffler distribution.In an unbiased case (c = 0.375), 〈fm〉 ∝ m (m � 1), i.e.,
δx2m = Dm for m � 1 (N → ∞)

. . . . . .
Introduction Infinite Ergodic Theory Deterministic Subdiffusion Conclusion
Time-averaged drift
Time-averaged drift
δxm =1
an
n−1∑k=0
(xk+m − xk)
Although vm(x) ≡ Tm(x) − x/∈L1+(µR), we have
1
an
n−1∑k=0
vm ◦ T k L→〈vm〉Mα as n → ∞.
In a biased case (c 6= 0.375), 〈vm〉 ∝ m (m � 1), i.e.,
δxm = V m for m � 1 (N → ∞)

. . . . . .
Introduction Infinite Ergodic Theory Deterministic Subdiffusion Conclusion
Generalized Lyapunov exponent and Hopf’s ergodictheorem
By ln |T ′(x)| ∈ L1+(µR)
λ ≡1
an
n−1∑k=0
ln |T ′(xk)|L→Mα
D,V and λ converge in distribution to a Mittag-Lefflerdistribution:
D,V , λL→Mα
However, by Hopf’s ergodic theorem,
D(x)
λ(x)→ χD and
V (x)
λ(x)→ χV
do not depend on an initial point x and converge to a constant.

. . . . . .
Introduction Infinite Ergodic Theory Deterministic Subdiffusion Conclusion
Generalized Lyapunov exponent and Hopf’s ergodictheorem
By ln |T ′(x)| ∈ L1+(µR)
λ ≡1
an
n−1∑k=0
ln |T ′(xk)|L→Mα
D,V and λ converge in distribution to a Mittag-Lefflerdistribution:
D,V , λL→Mα
However, by Hopf’s ergodic theorem,
D(x)
λ(x)→ χD and
V (x)
λ(x)→ χV
do not depend on an initial point x and converge to a constant.

. . . . . .
Introduction Infinite Ergodic Theory Deterministic Subdiffusion Conclusion
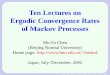
Susceptibility
0.2
0.22
0.24
0.26
0.28
0.3
0.32
2 2.2 2.4 2.6 2.8 3 3.2 3.4 3.6 3.8 4
χ D
z
0.25
0.3
0.35
0.4
0.45
0.5
2 2.2 2.4 2.6 2.8 3 3.2 3.4 3.6 3.8 4
χ V
z
Figure: Left: susceptibility χD (c = 0.375 and n = 106). Right:susceptibility χV (c = 0.35 and n = 106).

. . . . . .
Introduction Infinite Ergodic Theory Deterministic Subdiffusion Conclusion
Einstein relation
Linear response to a bias
〈V 〉F = ε〈D〉,
where 〈·〉F is an ensemble average under a bias ε = 3 − 8c.
Two assumptions:
• an injection to the set Jc is uniform2
• 〈∆n(k)〉F ∼= 〈∆n(k)〉, where ∆n(k) is the total numberof jumps in [k, k + m]
Einstein relationp = W0e
−F/2kBT ∼= 2 − 4c, q = W0e+F/2kBT ∼= 4c − 1
〈V 〉F =〈D〉F2kBT
2J = [−1/4, 1/4], x ∈ Jc is mapped to the neighboring cell.

. . . . . .
Introduction Infinite Ergodic Theory Deterministic Subdiffusion Conclusion
Einstein relation
Linear response to a bias
〈V 〉F = ε〈D〉,
where 〈·〉F is an ensemble average under a bias ε = 3 − 8c.
Two assumptions:
• an injection to the set Jc is uniform2
• 〈∆n(k)〉F ∼= 〈∆n(k)〉, where ∆n(k) is the total numberof jumps in [k, k + m]
Einstein relationp = W0e
−F/2kBT ∼= 2 − 4c, q = W0e+F/2kBT ∼= 4c − 1
〈V 〉F =〈D〉F2kBT
2J = [−1/4, 1/4], x ∈ Jc is mapped to the neighboring cell.

. . . . . .
Introduction Infinite Ergodic Theory Deterministic Subdiffusion Conclusion
Einstein relation
Linear response to a bias
〈V 〉F = ε〈D〉,
where 〈·〉F is an ensemble average under a bias ε = 3 − 8c.
Two assumptions:
• an injection to the set Jc is uniform2
• 〈∆n(k)〉F ∼= 〈∆n(k)〉, where ∆n(k) is the total numberof jumps in [k, k + m]
Einstein relationp = W0e
−F/2kBT ∼= 2 − 4c, q = W0e+F/2kBT ∼= 4c − 1
〈V 〉F =〈D〉F2kBT
2J = [−1/4, 1/4], x ∈ Jc is mapped to the neighboring cell.

. . . . . .
Introduction Infinite Ergodic Theory Deterministic Subdiffusion Conclusion
Einstein relation
-1
-0.5
0
0.5
1
1 0.5 0 -0.5 -1
V
ε

. . . . . .
Introduction Infinite Ergodic Theory Deterministic Subdiffusion Conclusion
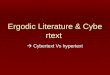
Relation between dynamical instability and transportcoefficient
Difference of the generalized Lyapunov exponent
∆λ ≡ 〈λ〉 − 〈λ〉F
Relation between dynamical instability and transportcoefficient
∆λ =µR(Jc)
2
{(1 +
V
Vmax
)ln
(1 +
V
Vmax
)+
(1 −
V
Vmax
)ln
(1 −
V
Vmax
)},
where V ≡ 〈xn〉/n1/(z−1), Vmax is V for c = 0.25, and µR
is an invariant measure of R(x).

. . . . . .
Introduction Infinite Ergodic Theory Deterministic Subdiffusion Conclusion
Relation between dynamical instability and transportcoefficient
Difference of the generalized Lyapunov exponent
∆λ ≡ 〈λ〉 − 〈λ〉F
Relation between dynamical instability and transportcoefficient
∆λ =µR(Jc)
2
{(1 +
V
Vmax
)ln
(1 +
V
Vmax
)+
(1 −
V
Vmax
)ln
(1 −
V
Vmax
)},
where V ≡ 〈xn〉/n1/(z−1), Vmax is V for c = 0.25, and µR
is an invariant measure of R(x).

. . . . . .
Introduction Infinite Ergodic Theory Deterministic Subdiffusion Conclusion
Relation between dynamical instability and transportcoefficient
0
0.2
0.4
0.6
0.8
1
1.2
-0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8
∆λ
V

. . . . . .
Introduction Infinite Ergodic Theory Deterministic Subdiffusion Conclusion
Conclusion
Intrinsic random behavior innon-equilibrium non-stationary phenomena
is established by infinite ergodic theory.
• Random diffusion coefficient and drift are characterized bya Mittag-Leffler distribution.
• Relation between the difference of the generalizedLyapunov exponent and drift is obtained.