Embed Size (px)
Citation preview
IBM - CVUT Student Research Projects
Remote Control of a FurbyToy with Bluetooth
Tomáš Kunc ([email protected])
IBM - CVUT Student Research Projects
2
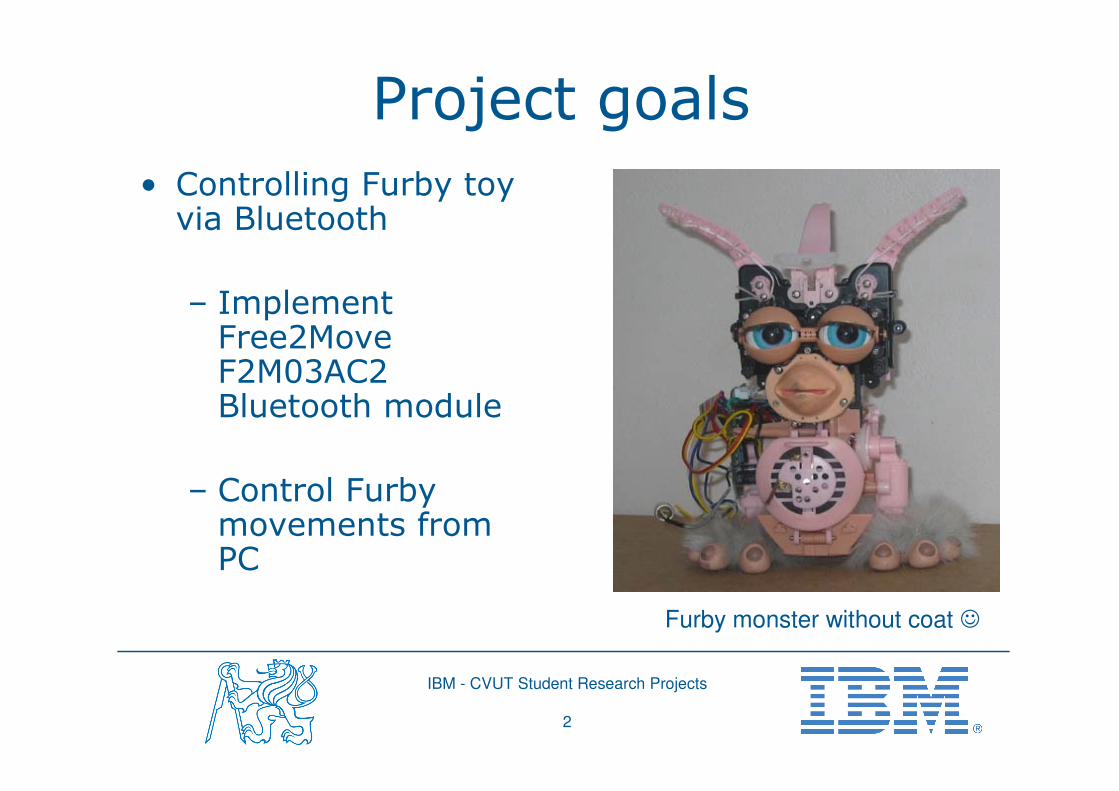
Project goals
• Controlling Furby toy via Bluetooth
– Implement Free2Move F2M03AC2 Bluetooth module
– Control Furbymovements from PC
Furby monster without coat ☺
IBM - CVUT Student Research Projects
3
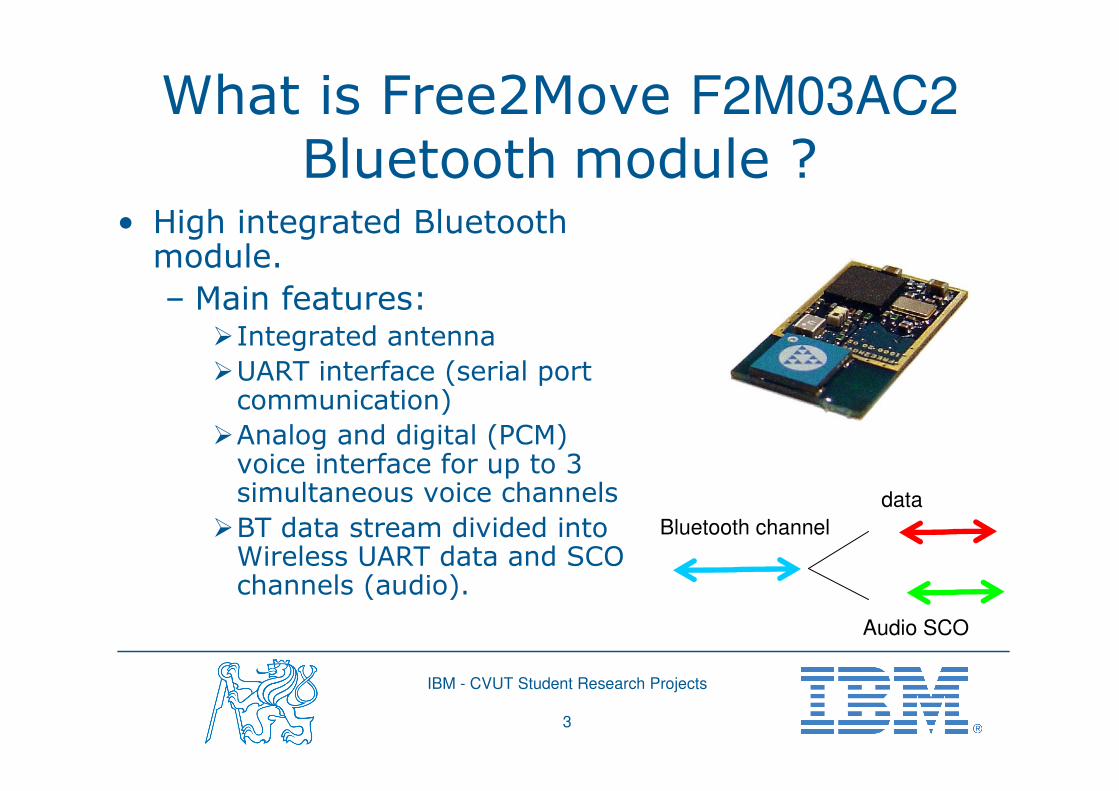
What is Free2Move F2M03AC2
Bluetooth module ?• High integrated Bluetooth module.
– Main features:�Integrated antenna
�UART interface (serial port communication)
�Analog and digital (PCM) voice interface for up to 3 simultaneous voice channels
�BT data stream divided into Wireless UART data and SCO channels (audio).
Bluetooth channel
data
Audio SCO
IBM - CVUT Student Research Projects
4
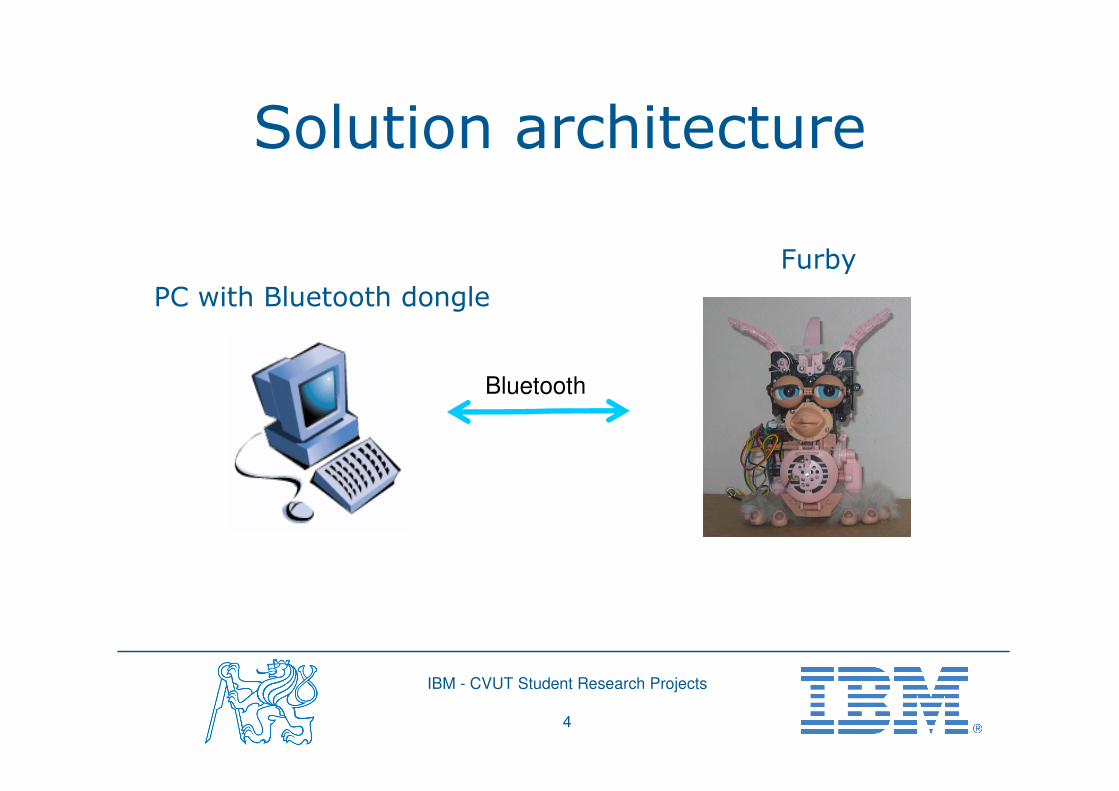
Solution architecture
Furby
PC with Bluetooth dongle
Bluetooth
IBM - CVUT Student Research Projects
5
What has changed from the last project presentation ?
• Beta version of Furby firmware have been created.
– Written in C programming language
– Runs at 8-bit microcontroller Atmel ATmega8.
– Controls Furby movements - driving motors to correct position.
– Commands are transferred to furby via Bluetooth serial port.
• BT communication board which I designed in the last part of the Furby project was used to interface microcontroller with BT serial port. This solution is temporary. BT module will be implemented on the final Furby board .
IBM - CVUT Student Research Projects
6
Current firmware capabilities
• Receives commands sent from pc via BT serial port.
• Operates motors that drive legs, mouth, head.
• Allows motion speed control.
IBM - CVUT Student Research Projects
7
Furby commands
• Commands are sent as bytes of data through serial line.
• Each command specifies motor number, speed, direction and target position.
• When command is completed acknowledge is sent back to PC.
• Commands are queued - there are 2 FIFO command queues (one for each motor). This allows to send up to 20 commands to every motor at one moment. Commands are then processed sequentially. This also handles Bluetooth data transfer instability, because there isn’t critical timing (no critical synchronization issues between PC and Furby toy)
IBM - CVUT Student Research Projects
8
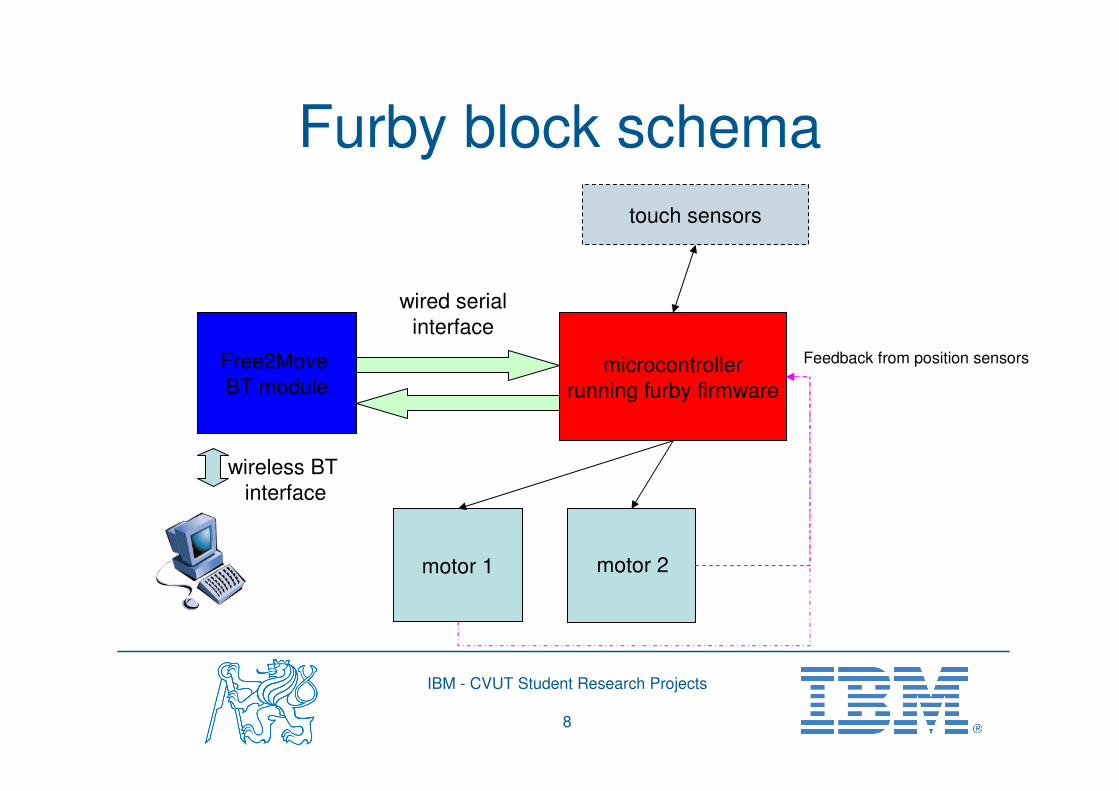
Furby block schema
microcontroller
running furby firmware
Free2Move
BT module
wired serial
interface
motor 1 motor 2
Feedback from position sensors
touch sensors
wireless BT
interface
IBM - CVUT Student Research Projects
9
What needs to be done?
• Some new features have to be be added to the firmware.– Interface with Furby touch sensors and scanning their status.
– Implement new commands which will give information about furby status.
• Final circuit board (PCB)– Integrate Free2Move BT module + microcontroller and other support circuits (stabilized power supply, etc…)
– Implement BT module audio interface.
IBM - CVUT Student Research Projects
10
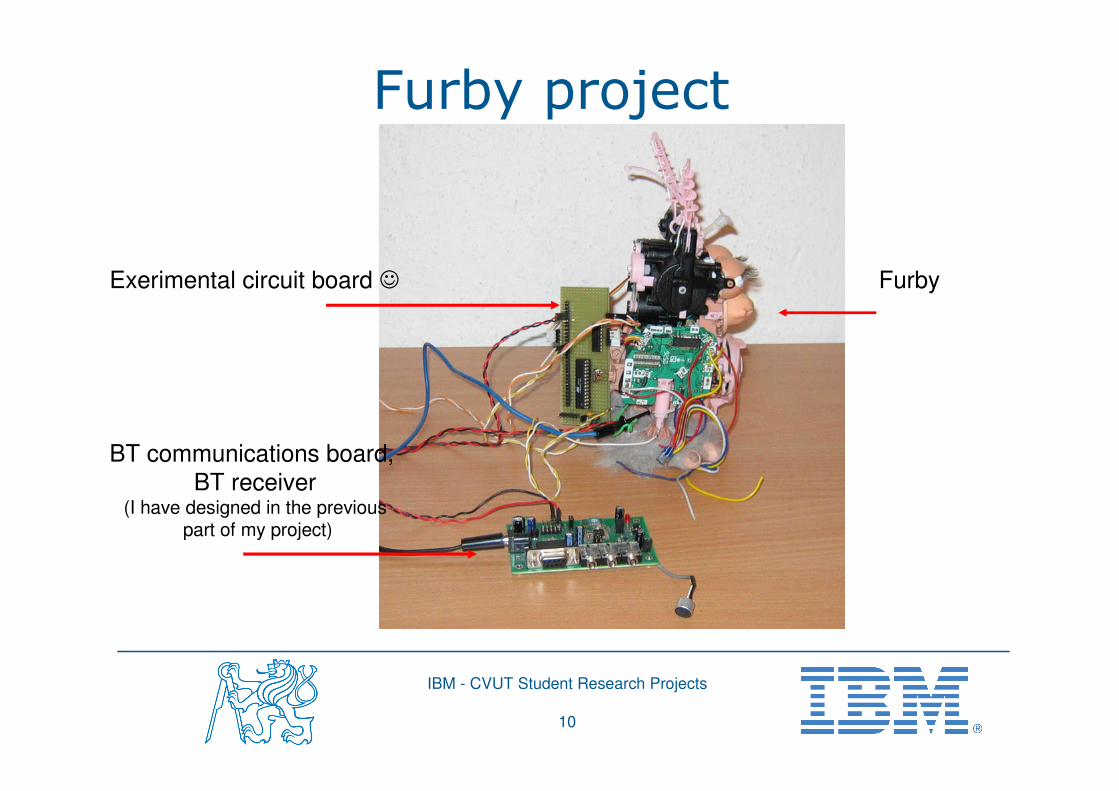
Furby project
Exerimental circuit board ☺
BT communications board,
BT receiver(I have designed in the previous
part of my project)
Furby
IBM - CVUT Student Research Projects
11
Possible utilizations
• Presenting functionality of BT modules
• Showing possibility of interactive remote control
robotic machine via Bluetooth
• Interaction human with computer through Furby
IBM - CVUT Student Research Projects
12
Conclusion
What is done:• BT communication board (have been mentioned
in last project presentation)
• Furby beta firmware
• Experimental prototype circuit board
What is to be done:• Finish the Furby firmware
• Design final version of the circuit board
IBM - CVUT Student Research Projects
13
Thank you for your attention…