Embed Size (px)
DESCRIPTION
PMSM control
Citation preview
Renesas Electronics America Inc.© 2012 Renesas Electronics America Inc. All rights reserved.
Sensorless Vector Control and Implementation: Why and How
© 2012 Renesas Electronics America Inc. All rights reserved.2
Renesas Technology & Solution Portfolio
© 2012 Renesas Electronics America Inc. All rights reserved.3
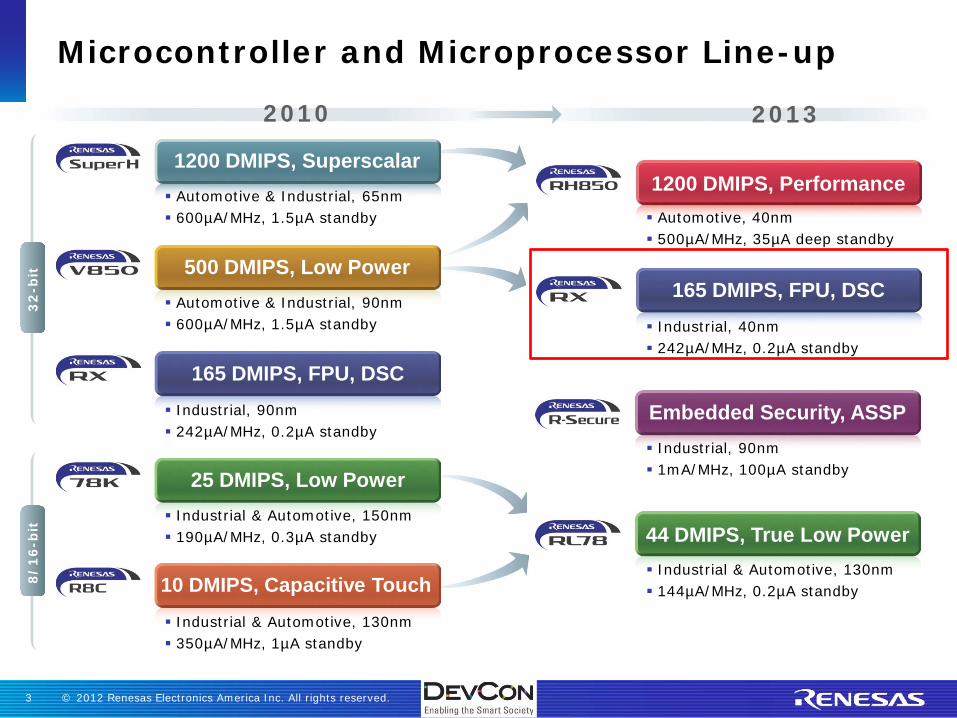
Microcontroller and Microprocessor Line-up
Wide Format LCDs Industrial & Automotive, 130nm 350µA/MHz, 1µA standby
44 DMIPS, True Low Power
Embedded Security, ASSP
165 DMIPS, FPU, DSC
1200 DMIPS, Performance1200 DMIPS, Superscalar
500 DMIPS, Low Power
165 DMIPS, FPU, DSC
25 DMIPS, Low Power
10 DMIPS, Capacitive Touch
Industrial & Automotive, 150nm 190µA/MHz, 0.3µA standby
Industrial, 90nm 242µA/MHz, 0.2µA standby
Automotive & Industrial, 90nm 600µA/MHz, 1.5µA standby
Automotive & Industrial, 65nm 600µA/MHz, 1.5µA standby Automotive, 40nm
500µA/MHz, 35µA deep standby
Industrial, 40nm 242µA/MHz, 0.2µA standby
Industrial, 90nm 1mA/MHz, 100µA standby
Industrial & Automotive, 130nm 144µA/MHz, 0.2µA standby
2010 2013
32
-bit
8/16
-bit
© 2012 Renesas Electronics America Inc. All rights reserved.4
Challenge: Sensorless vector control increases the energy efficiency of motor control systems that drive the smart society. However, understanding and implementing sensorless vector control is a herculean task.
Solution:This class will help you understand key challenges associated with sensorless vector control and how to implement it using Renesas microcontrollers
‘Enabling The Smart Society’
MCU
© 2012 Renesas Electronics America Inc. All rights reserved.5
Agenda
Need for vector control
Theory behind vector control
Challenges in implementing sensorless vector control
RX62T MCU family for sensorless vector control
Renesas motor control solutions
© 2012 Renesas Electronics America Inc. All rights reserved.6
Macro Factors Driving Need for Energy Efficiency
Global Environmental Concerns
Energy Efficiency Policies
New Initiatives
© 2012 Renesas Electronics America Inc. All rights reserved.7
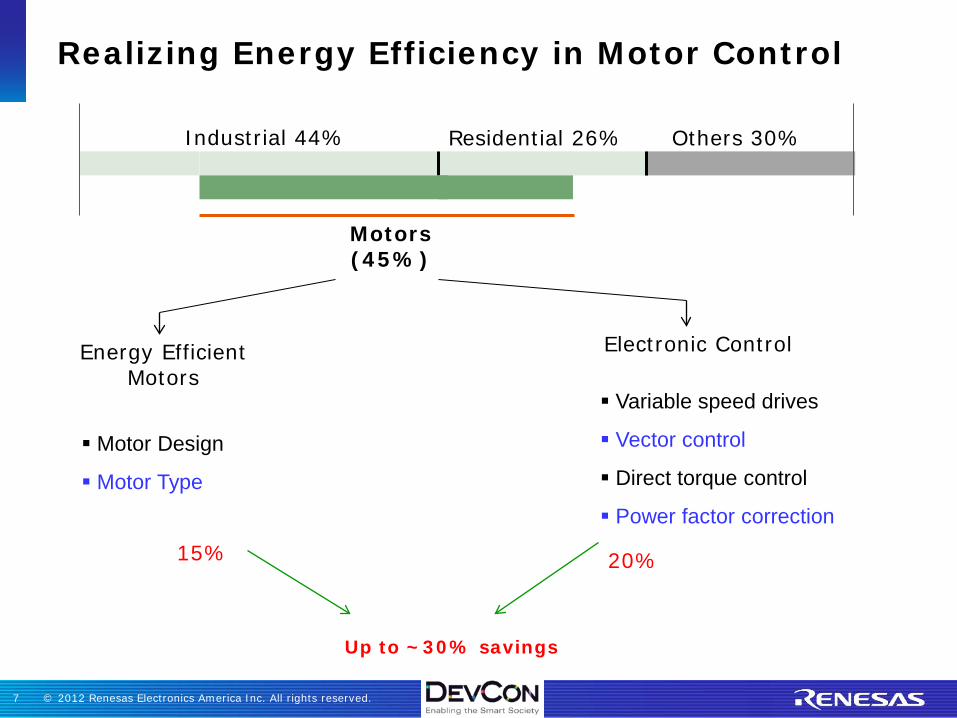
Realizing Energy Efficiency in Motor Control
Industrial 44% Residential 26% Others 30%
Energy Efficient Motors
Electronic Control
Variable speed drives
Vector control
Direct torque control
Power factor correction
Motor Design
Motor Type
Up to ~30% savings
15% 20%
Motors (45%)
© 2012 Renesas Electronics America Inc. All rights reserved.8
Sensorless Vector Control Theory
© 2012 Renesas Electronics America Inc. All rights reserved.9
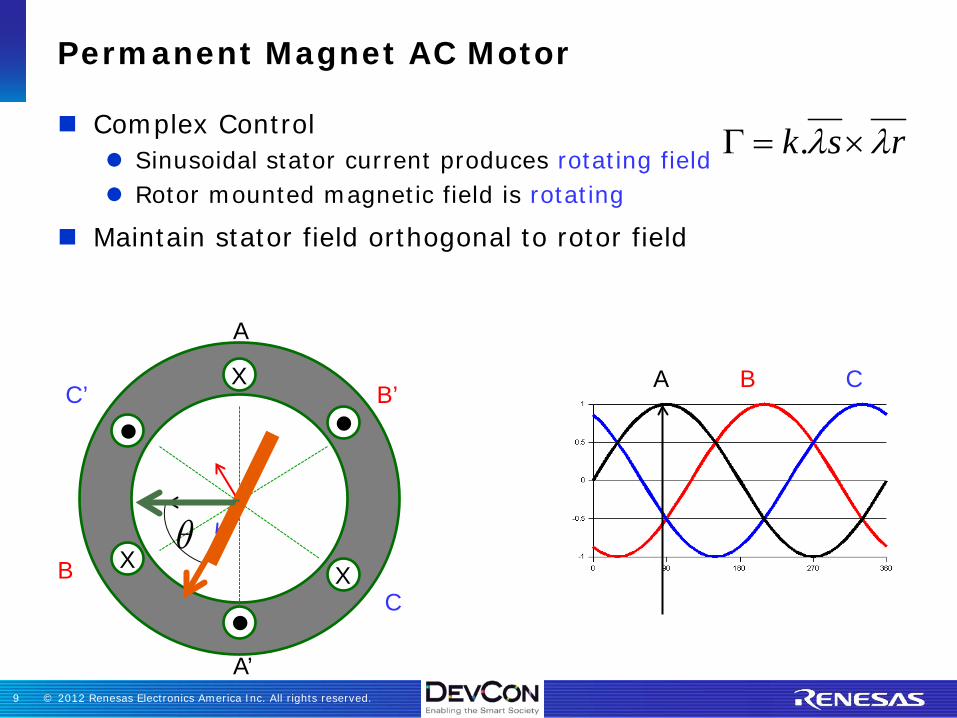
Permanent Magnet AC Motor
Complex Control Sinusoidal stator current produces rotating field Rotor mounted magnetic field is rotating
Maintain stator field orthogonal to rotor field
rsk λλ ×=Γ .
X
A
A’
XB
B’C’
XC
A B C
θ
© 2012 Renesas Electronics America Inc. All rights reserved.10
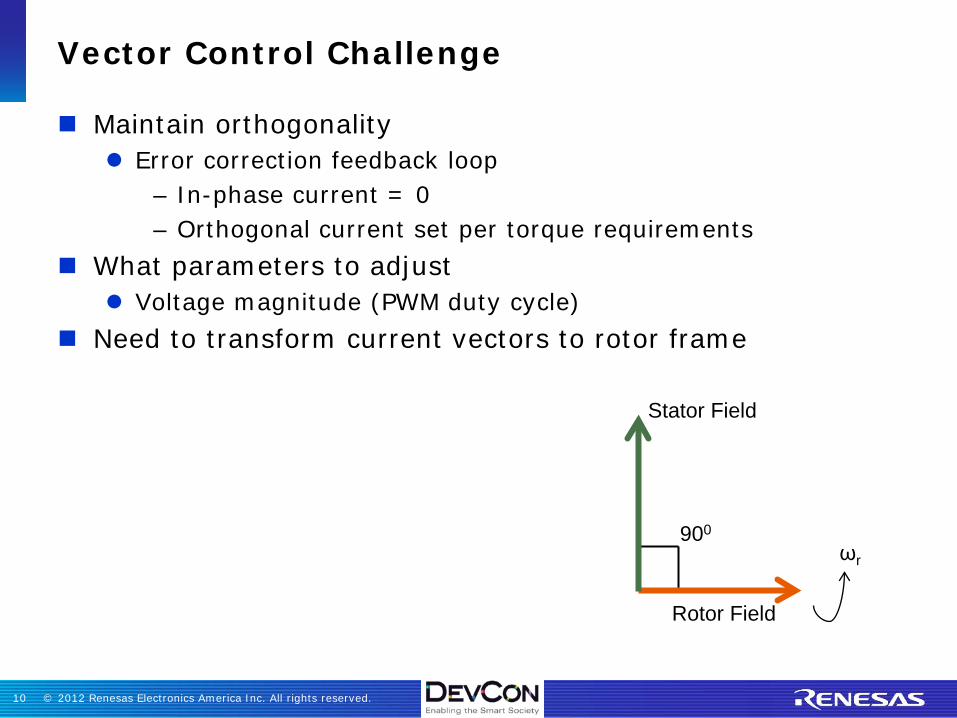
Vector Control Challenge
Maintain orthogonality Error correction feedback loop
– In-phase current = 0– Orthogonal current set per torque requirements
What parameters to adjust Voltage magnitude (PWM duty cycle)
Need to transform current vectors to rotor frame
Rotor Field
Stator Field
900
ωr
© 2012 Renesas Electronics America Inc. All rights reserved.11
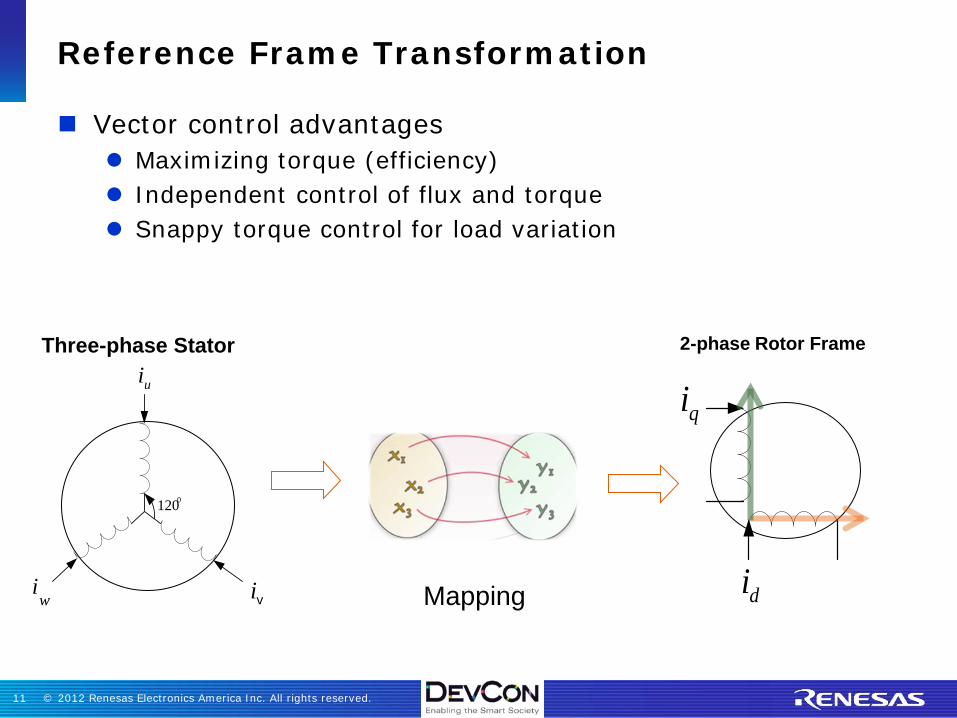
Reference Frame Transformation
Vector control advantages Maximizing torque (efficiency) Independent control of flux and torque Snappy torque control for load variation
Mapping
qi
di
2-phase Rotor FrameThree-phase Statorui
wi
vi
0120
© 2012 Renesas Electronics America Inc. All rights reserved.12
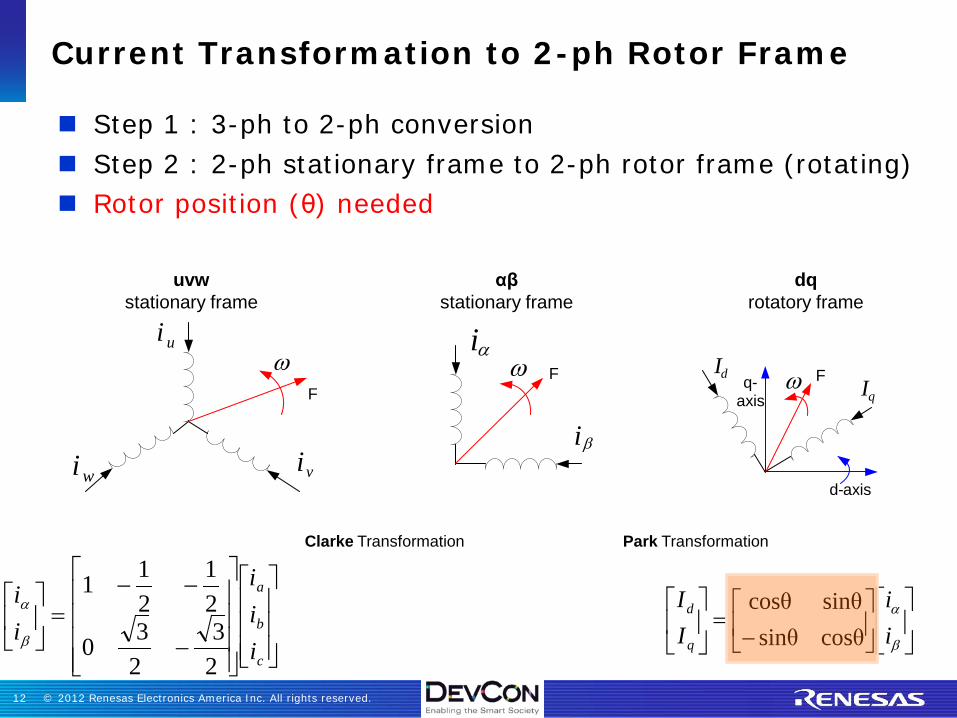
Current Transformation to 2-ph Rotor Frame
Step 1 : 3-ph to 2-ph conversion
−
−−=
c
b
a
iii
ii
23
230
21
211
β
α
−
=
β
α
ii
II
q
d
cosθsinθsinθcosθ
ui
wi vi
F
Clarke Transformation
ω
uvwstationary frame
αi
βi
Fω
αβstationary frame
dIqI
Fq-axis
d-axis
Park Transformation
ω
dqrotatory frame
Step 2 : 2-ph stationary frame to 2-ph rotor frame (rotating) Rotor position (θ) needed
© 2012 Renesas Electronics America Inc. All rights reserved.13
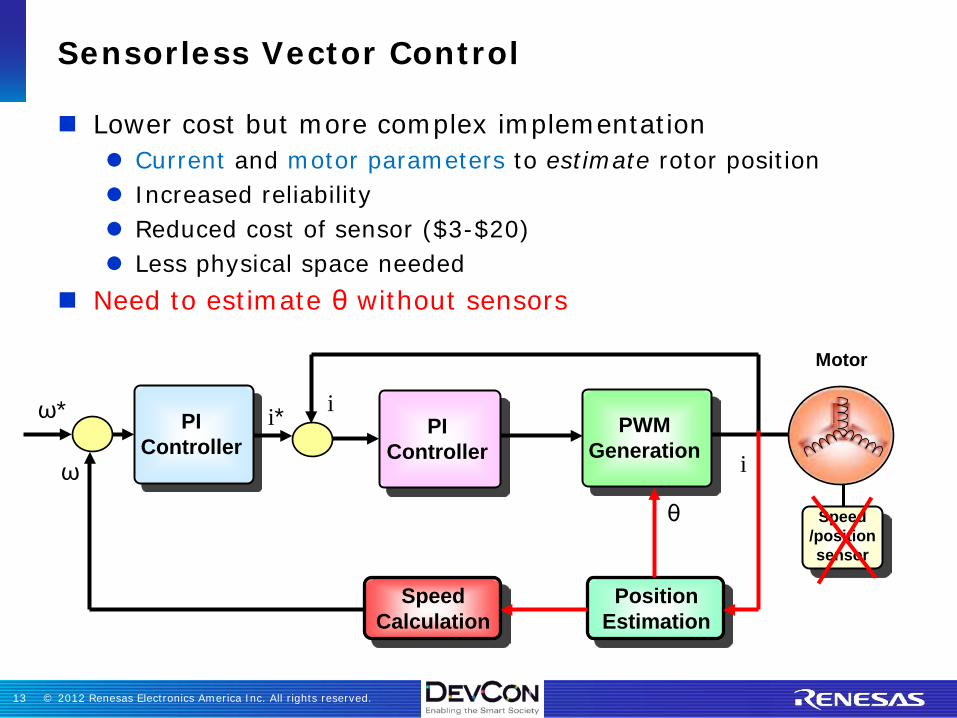
Sensorless Vector Control
Lower cost but more complex implementation Current and motor parameters to estimate rotor position Increased reliability Reduced cost of sensor ($3-$20) Less physical space needed
Need to estimate θ without sensors
Speed /position sensor
Speed Calculation
Motor
PWM Generation
PIController
PIController
ω*
ω
i* i
θ
Position Estimation
i
© 2012 Renesas Electronics America Inc. All rights reserved.14
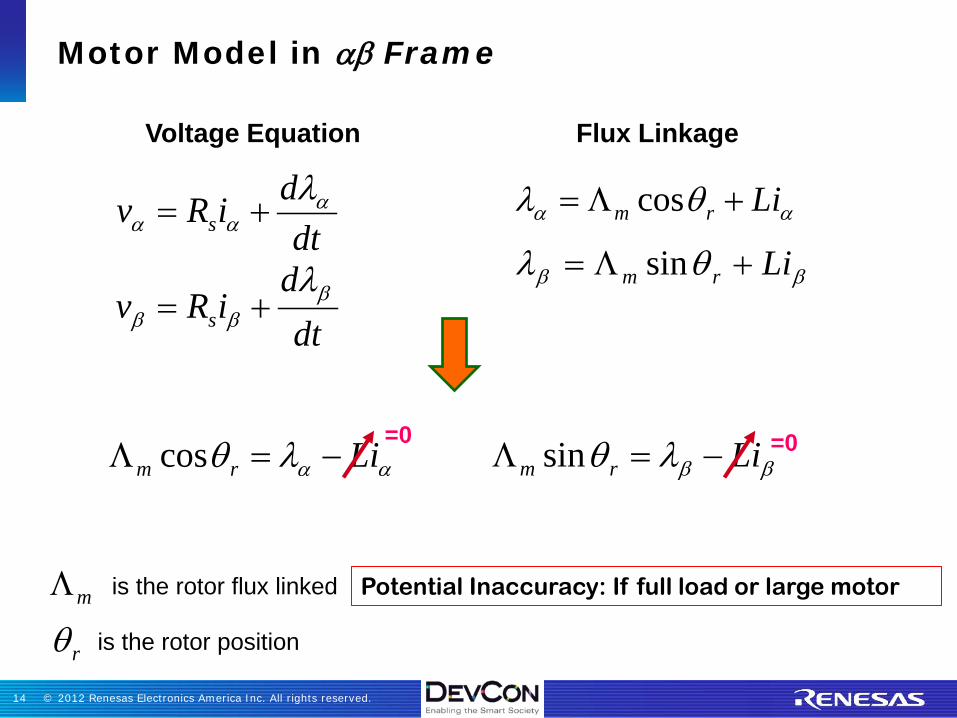
dtdiRv s
ααα
λ+= αα θλ Lirm +Λ= cos
ββ θλ Lirm +Λ= sin
ααλθ Lirm −=Λ cos ββλθ Lirm −=Λ sin
is the rotor flux linkedmΛ
is the rotor positionrθ
Flux LinkageVoltage Equation
=0=0
Motor Model in αβ Frame
dtd
iRv sβ
ββ
λ+=
Potential Inaccuracy: If full load or large motor
© 2012 Renesas Electronics America Inc. All rights reserved.15
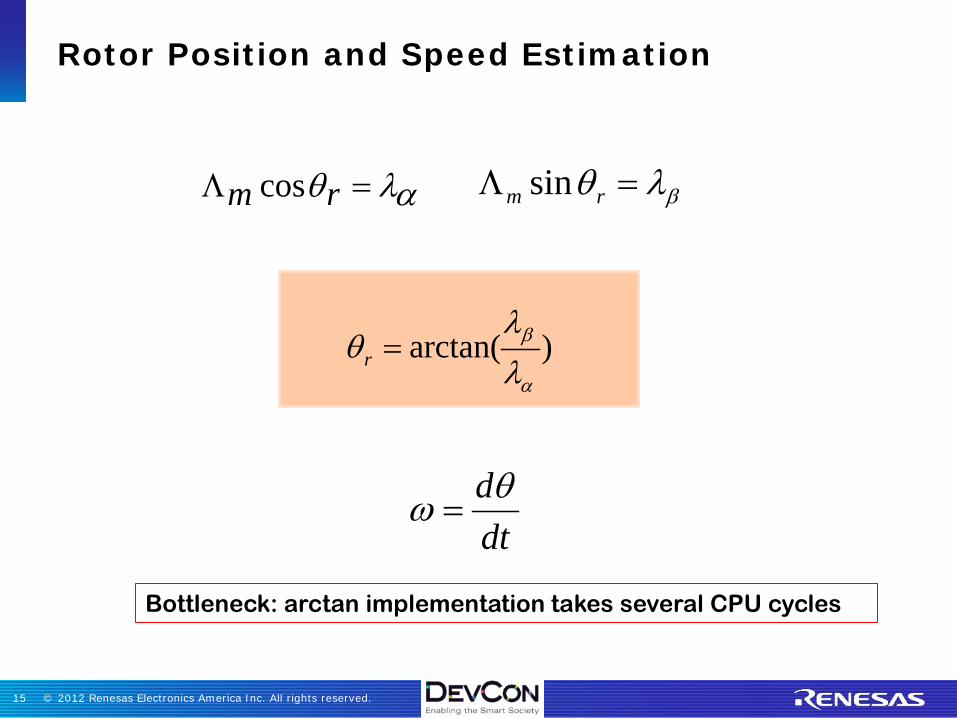
Rotor Position and Speed Estimation
αλθ =Λ rm cos βλθ =Λ rm sin
)arctan(α
β
λλ
θ =r
dtdθω =
Bottleneck: arctan implementation takes several CPU cycles
© 2012 Renesas Electronics America Inc. All rights reserved.16
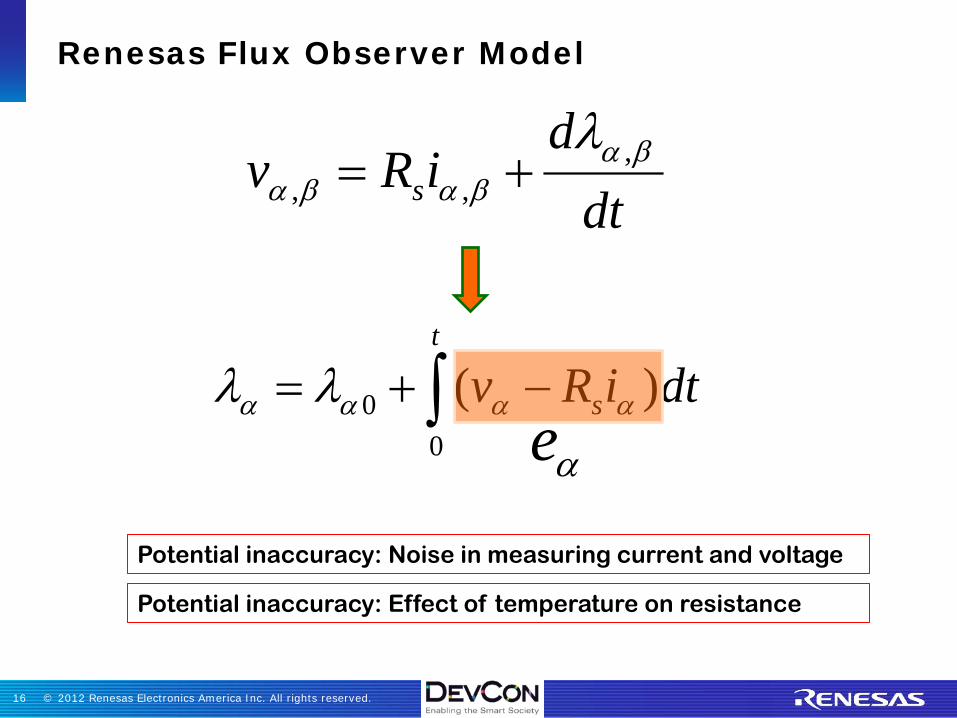
Renesas Flux Observer Model
dtiRv s
t
)(0
0 αααα λλ −+= ∫
dtd
iRv sβα
βαβα
λ ,,, +=
αePotential inaccuracy: Noise in measuring current and voltage
Potential inaccuracy: Effect of temperature on resistance
© 2012 Renesas Electronics America Inc. All rights reserved.17
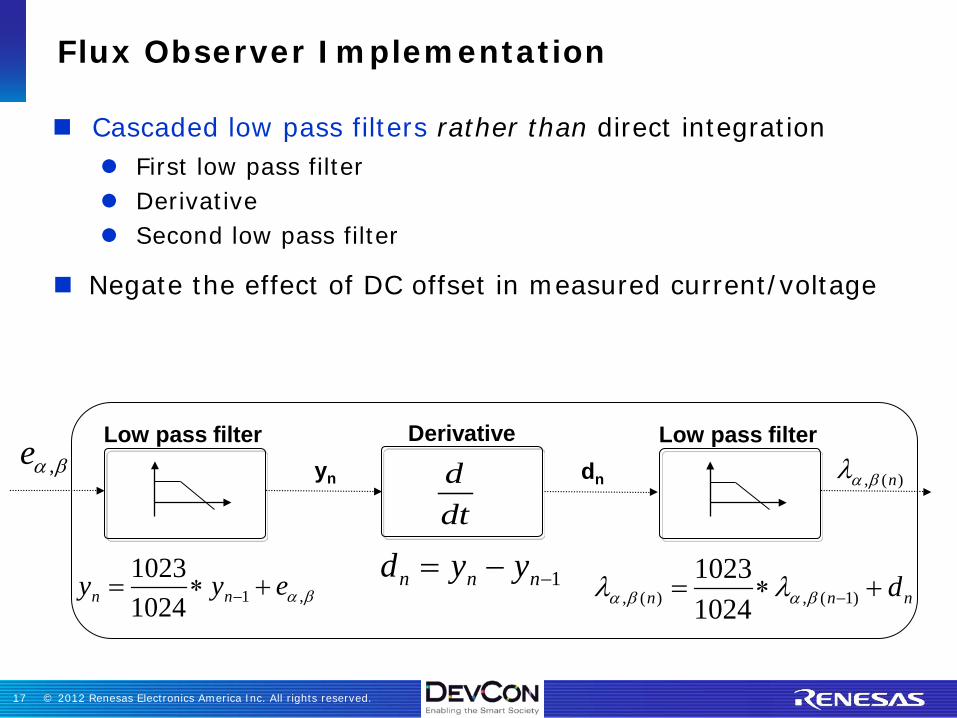
βα ,e
nnn d+∗= − )1(,)(, 10241023
βαβα λλ1−−= nnn yyd
Low pass filteryn
Derivativedn
dtd
Low pass filter
βα ,110241023 eyy nn +∗= −
)(, nβαλ
Cascaded low pass filters rather than direct integration First low pass filter Derivative Second low pass filter
Negate the effect of DC offset in measured current/voltage
Flux Observer Implementation
© 2012 Renesas Electronics America Inc. All rights reserved.18
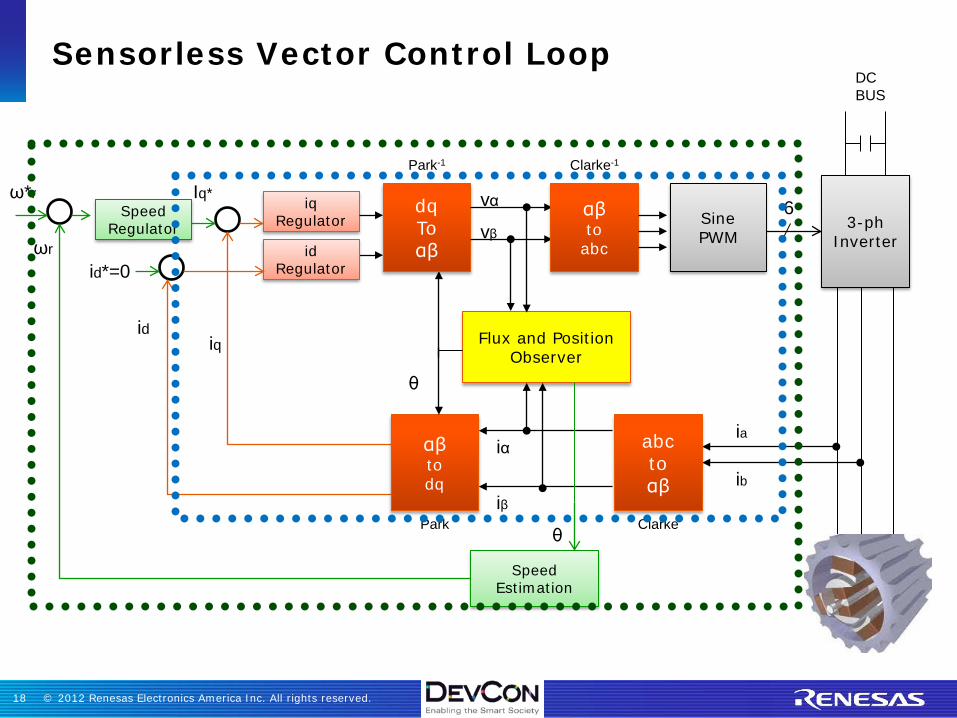
Sensorless Vector Control Loop
abctoαβ
ia
ib
dqToαβ
vα
vβ
αβto
abc
Speed Estimation
θ
ωr
ω*r
id Regulatorid*=0
idiq
iqRegulatorSpeed
Regulator
Iq*
3-phInverter
6Sine PWM
DC BUS
αβtodq
iα
iβ
θ
Flux and Position Observer
ClarkePark
Park-1 Clarke-1
© 2012 Renesas Electronics America Inc. All rights reserved.19
Implementation Challenges
© 2012 Renesas Electronics America Inc. All rights reserved.20
High performance CPU, FPU
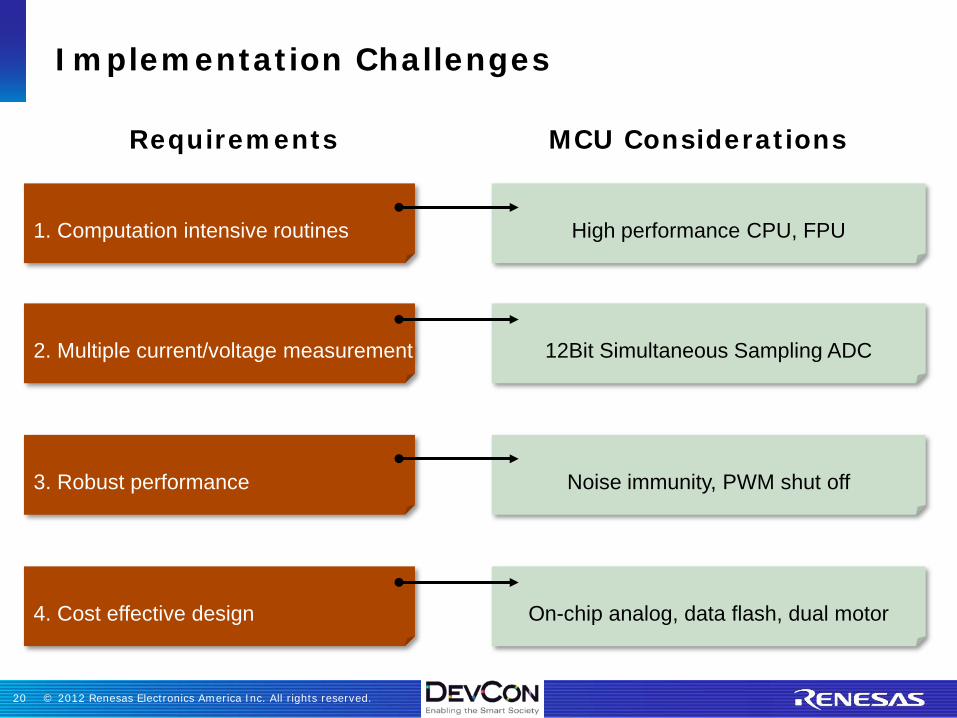
Implementation Challenges
1. Computation intensive routines
12Bit Simultaneous Sampling ADC2. Multiple current/voltage measurement
Noise immunity, PWM shut off3. Robust performance
On-chip analog, data flash, dual motor4. Cost effective design
Requirements MCU Considerations
© 2012 Renesas Electronics America Inc. All rights reserved.21
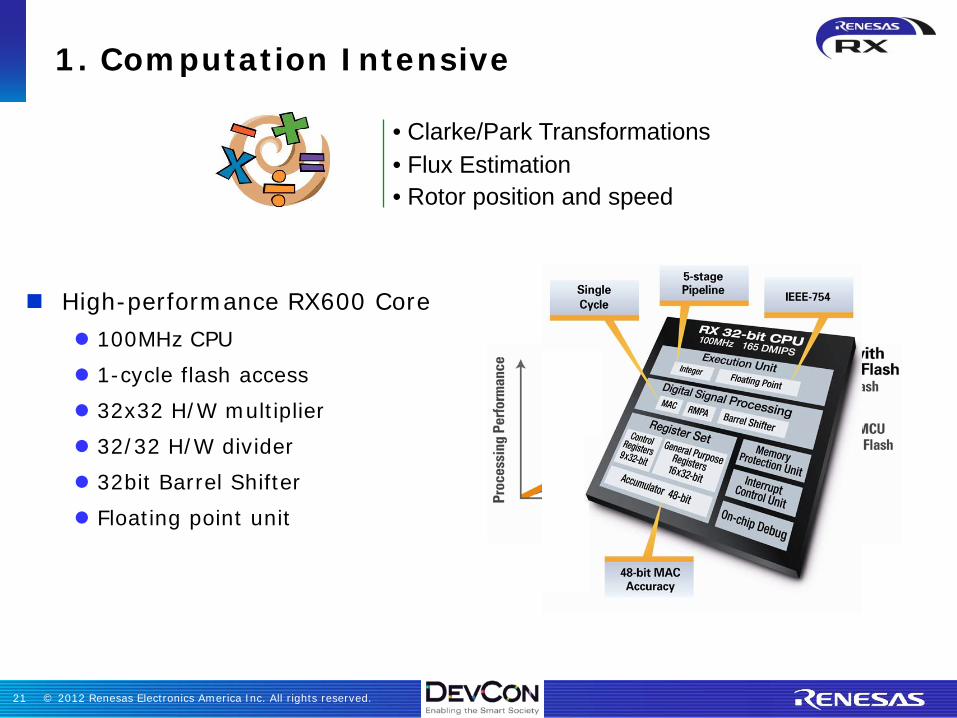
1. Computation Intensive
High-performance RX600 Core 100MHz CPU 1-cycle flash access 32x32 H/W multiplier 32/32 H/W divider 32bit Barrel Shifter Floating point unit
• Clarke/Park Transformations• Flux Estimation• Rotor position and speed
© 2012 Renesas Electronics America Inc. All rights reserved.22
Floating Point Unit Advantages
PerformanceWide range and high resolution No scaling, overflow or saturation Reduced code size
Ease of Use Ease of coding, reading, debugging Compatible with the C/Matlab simulation code
© 2012 Renesas Electronics America Inc. All rights reserved.23
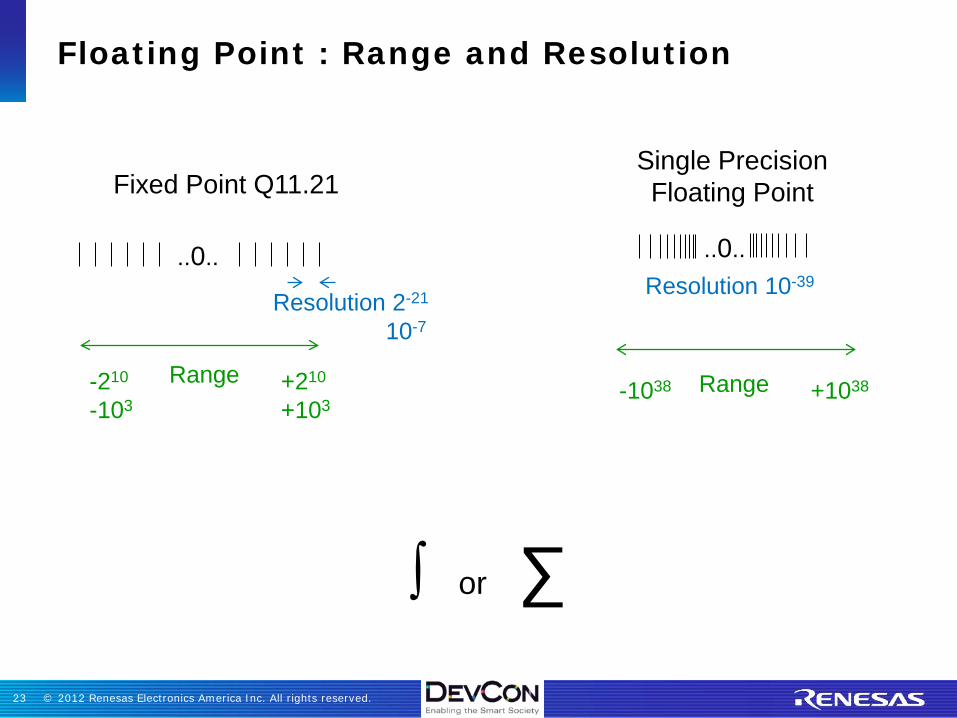
Floating Point : Range and Resolution
-210
-103+210
+103
Range
Resolution 2-21
10-7
..0..
Fixed Point Q11.21Single Precision Floating Point
..0..
-1038 +1038Range
Resolution 10-39
∫ or ∑
© 2012 Renesas Electronics America Inc. All rights reserved.24
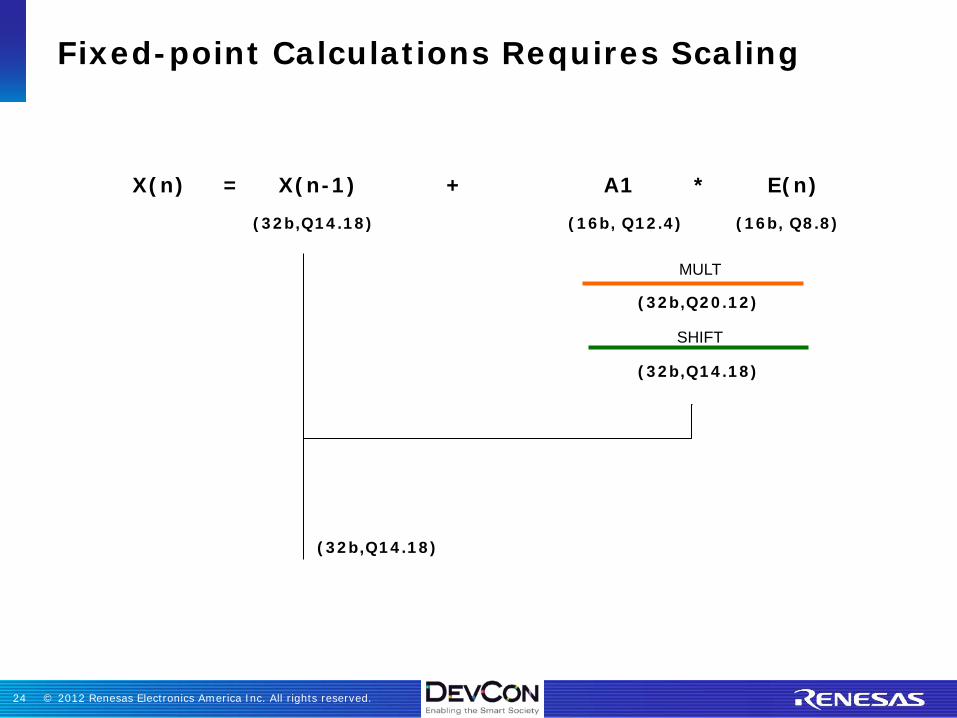
Fixed-point Calculations Requires Scaling
X(n) = X(n-1) + A1 * E(n)(16b, Q12.4) (16b, Q8.8)(32b,Q14.18)
(32b,Q20.12)
(32b,Q14.18)
MULT
SHIFT
(32b,Q14.18)
© 2012 Renesas Electronics America Inc. All rights reserved.25
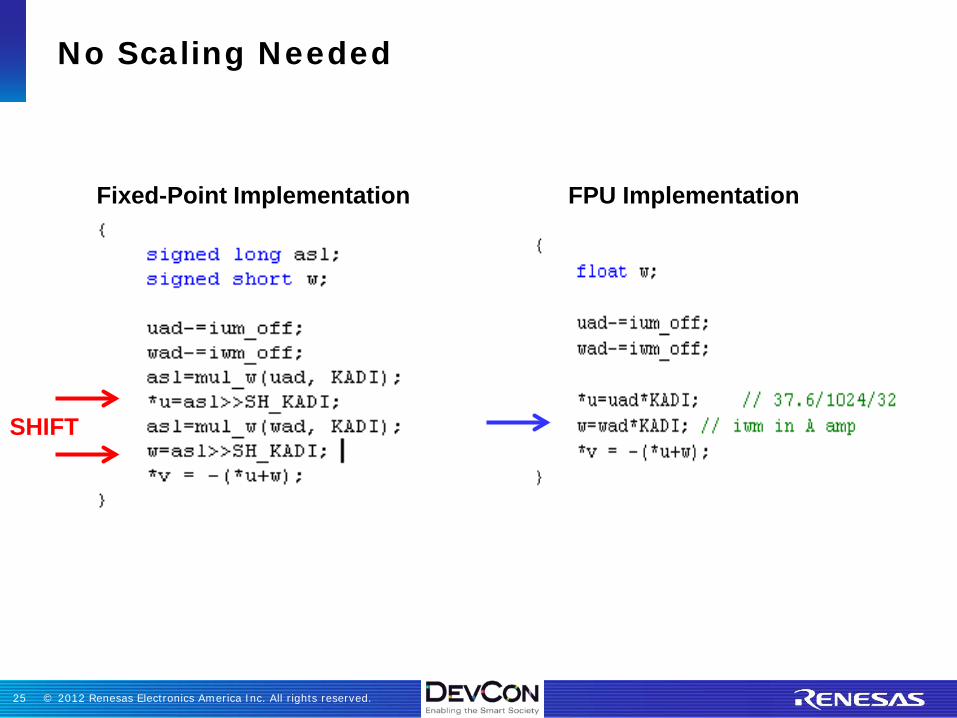
No Scaling Needed
FPU ImplementationFixed-Point Implementation
SHIFT
© 2012 Renesas Electronics America Inc. All rights reserved.26
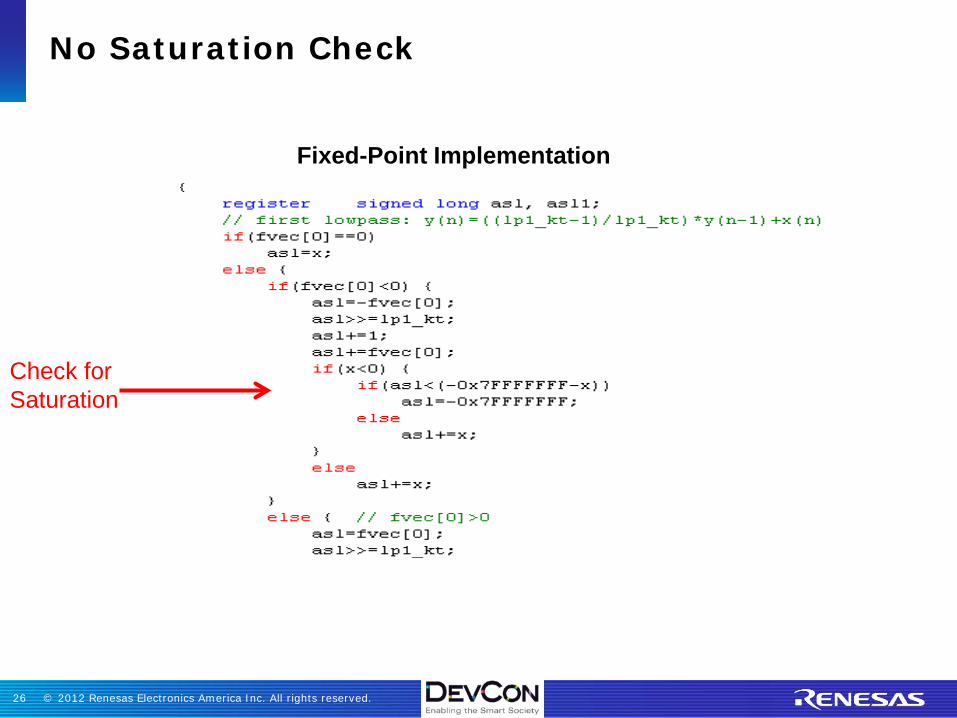
No Saturation Check
Fixed-Point Implementation
Check for Saturation
© 2012 Renesas Electronics America Inc. All rights reserved.27
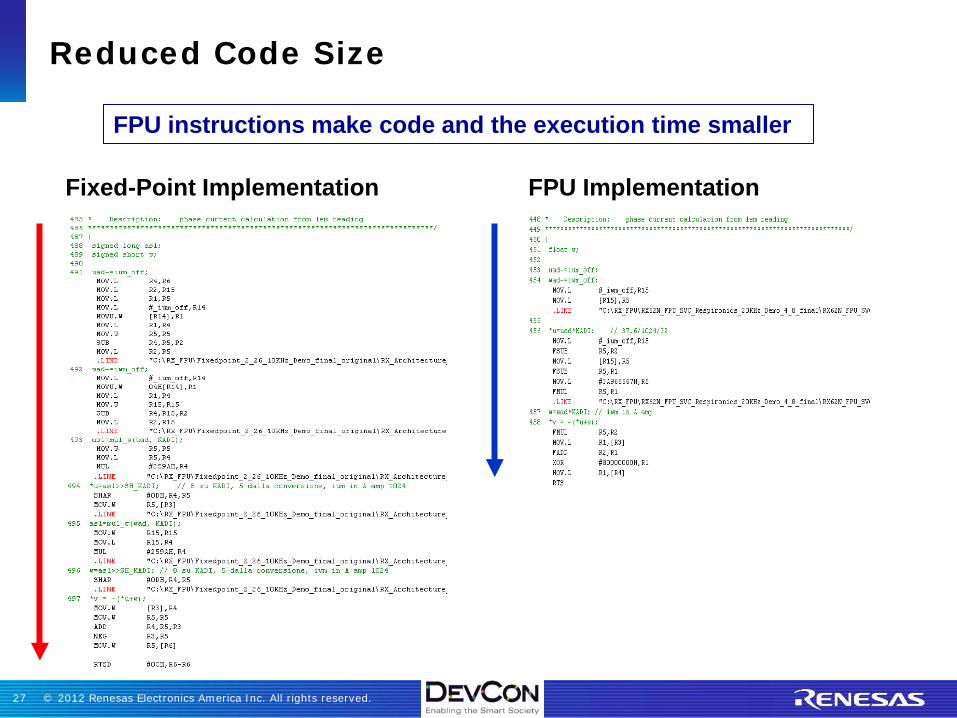
Reduced Code Size
FPU ImplementationFixed-Point Implementation
FPU instructions make code and the execution time smaller
© 2012 Renesas Electronics America Inc. All rights reserved.28
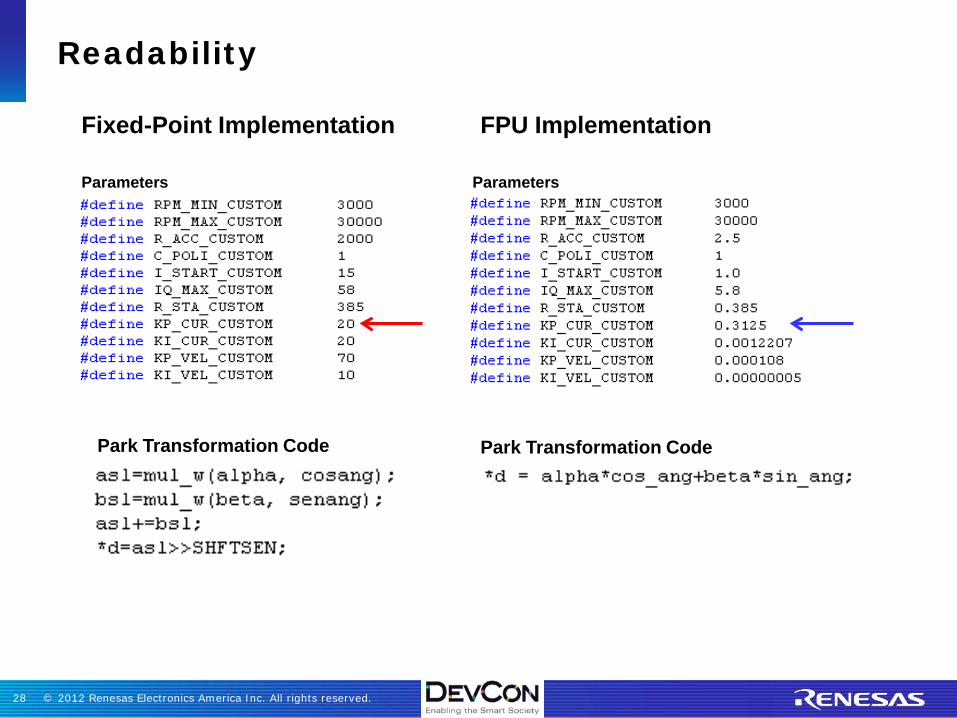
Readability
Fixed-Point Implementation FPU Implementation
Parameters Parameters
Park Transformation Code Park Transformation Code
© 2012 Renesas Electronics America Inc. All rights reserved.29
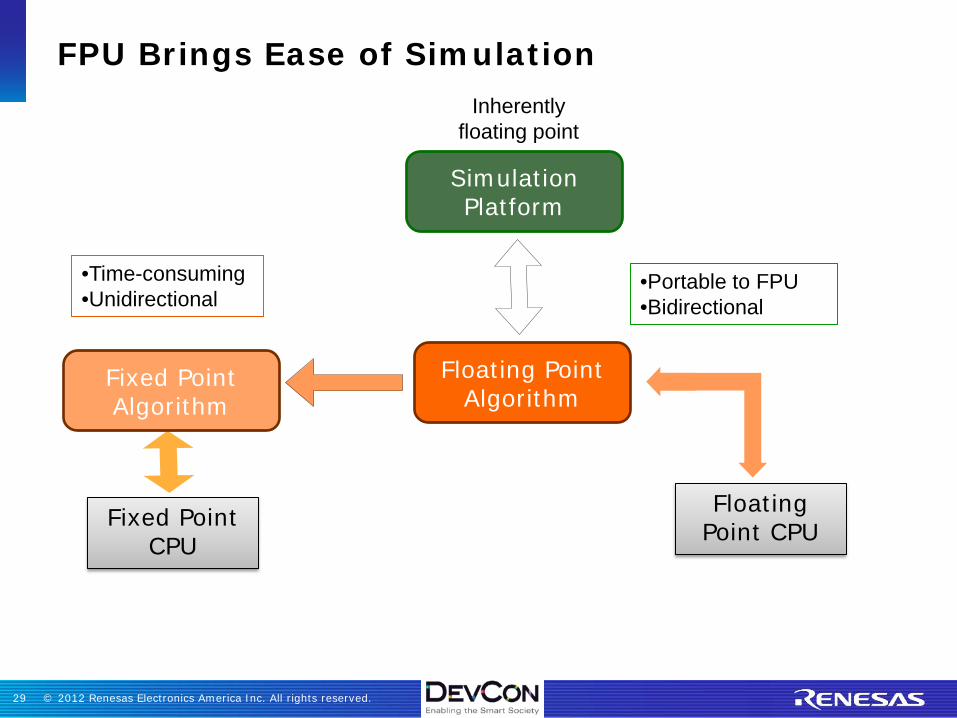
FPU Brings Ease of Simulation
•Portable to FPU•Bidirectional
•Time-consuming•Unidirectional
Simulation Platform
Inherently floating point
Floating Point Algorithm
Fixed Point CPU
Fixed Point Algorithm
Floating Point CPU
© 2012 Renesas Electronics America Inc. All rights reserved.30
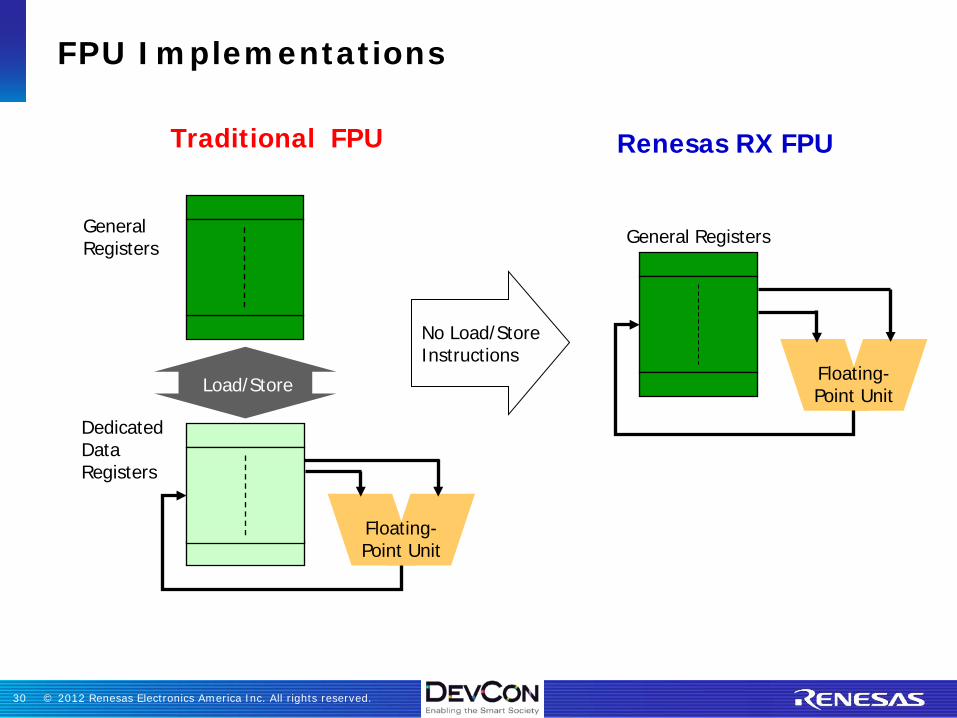
FPU Implementations
No Load/Store Instructions
Renesas RX FPU
Floating-Point Unit
Dedicated Data Registers
General Registers
Traditional FPU
Load/Store
General Registers
Floating-Point Unit
© 2012 Renesas Electronics America Inc. All rights reserved.31
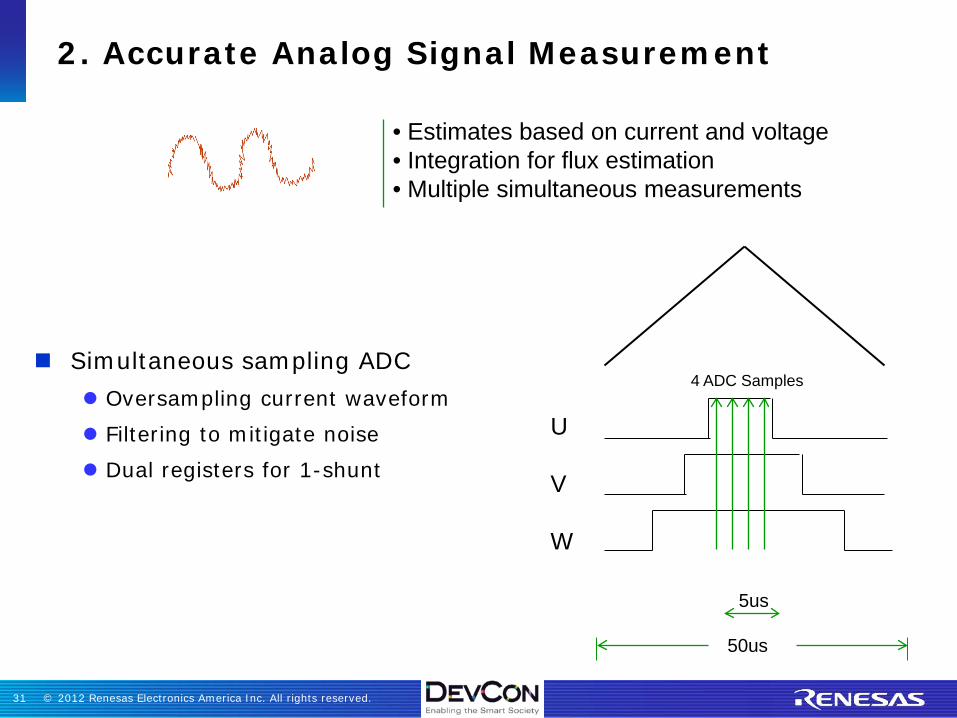
2. Accurate Analog Signal Measurement
Simultaneous sampling ADC Oversampling current waveform Filtering to mitigate noise Dual registers for 1-shunt
U
V
W
50us
5us
4 ADC Samples
• Estimates based on current and voltage• Integration for flux estimation• Multiple simultaneous measurements
© 2012 Renesas Electronics America Inc. All rights reserved.32
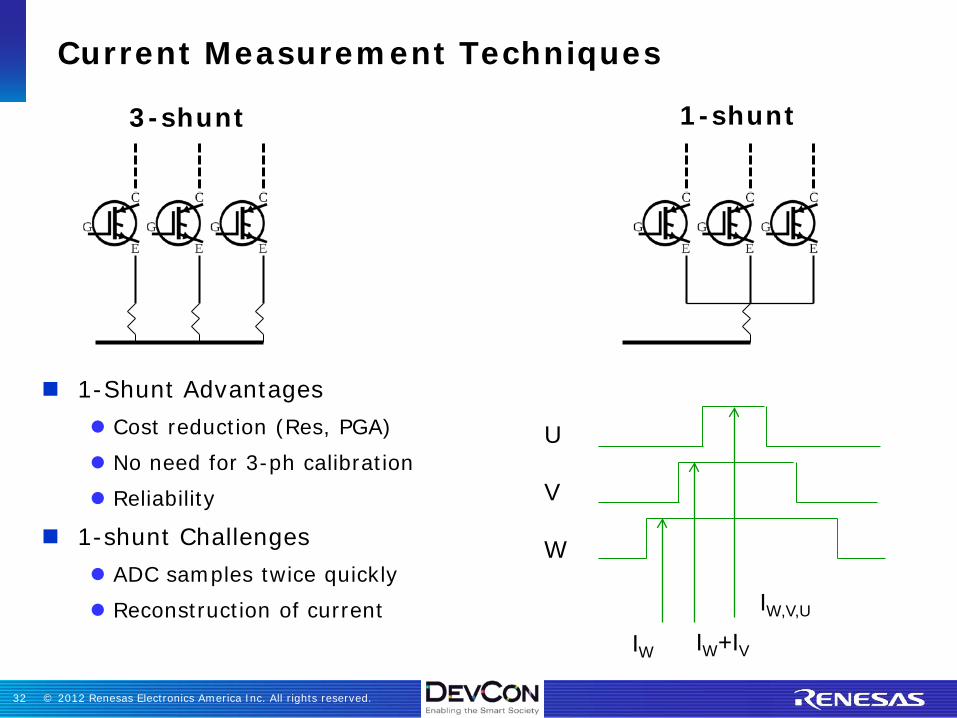
Current Measurement Techniques
3-shunt
U
V
W
IW IW+IV
1-Shunt Advantages Cost reduction (Res, PGA) No need for 3-ph calibration Reliability
1-shunt Challenges ADC samples twice quickly Reconstruction of current
1-shunt
IW,V,U
© 2012 Renesas Electronics America Inc. All rights reserved.33
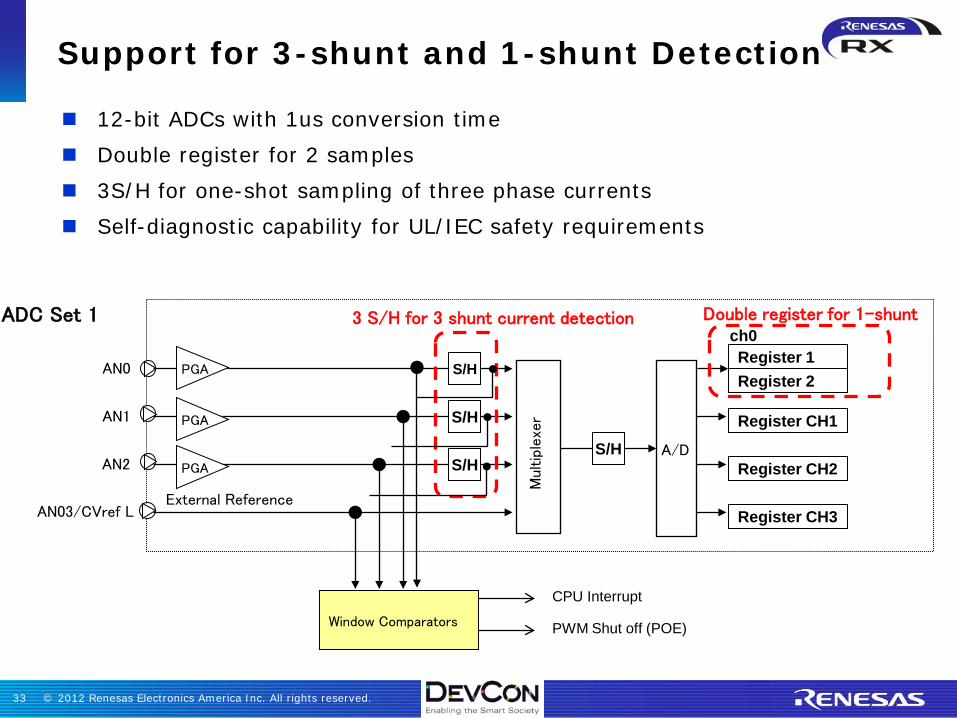
Support for 3-shunt and 1-shunt Detection
AN0
AN1
AN2
Multip
lexe
r
ADC Set 1
A/D
Register 2
Register CH1
Register CH2
Register CH3
ch0
PGA S/H
S/H
S/HS/H
External Reference
3 S/H for 3 shunt current detection
AN03/CVref L
Register 1
Double register for 1-shunt
12-bit ADCs with 1us conversion time Double register for 2 samples 3S/H for one-shot sampling of three phase currents Self-diagnostic capability for UL/IEC safety requirements
PGA
PGA
Window Comparators
CPU Interrupt
PWM Shut off (POE)
© 2012 Renesas Electronics America Inc. All rights reserved.34
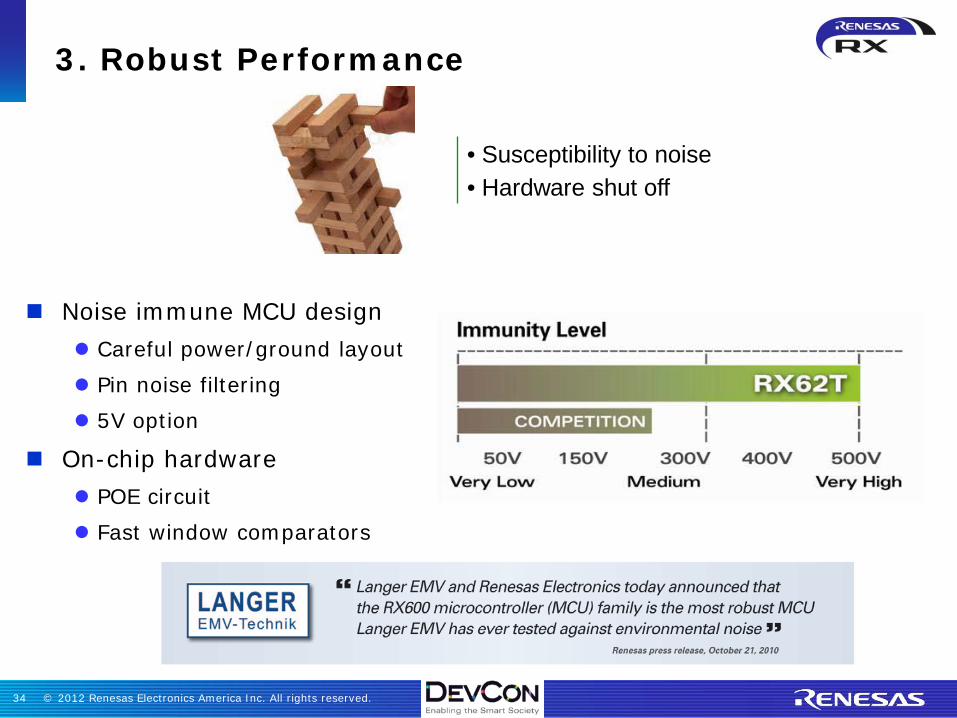
3. Robust Performance
Noise immune MCU design Careful power/ground layout Pin noise filtering 5V option
On-chip hardware POE circuit Fast window comparators
• Susceptibility to noise• Hardware shut off
© 2012 Renesas Electronics America Inc. All rights reserved.35
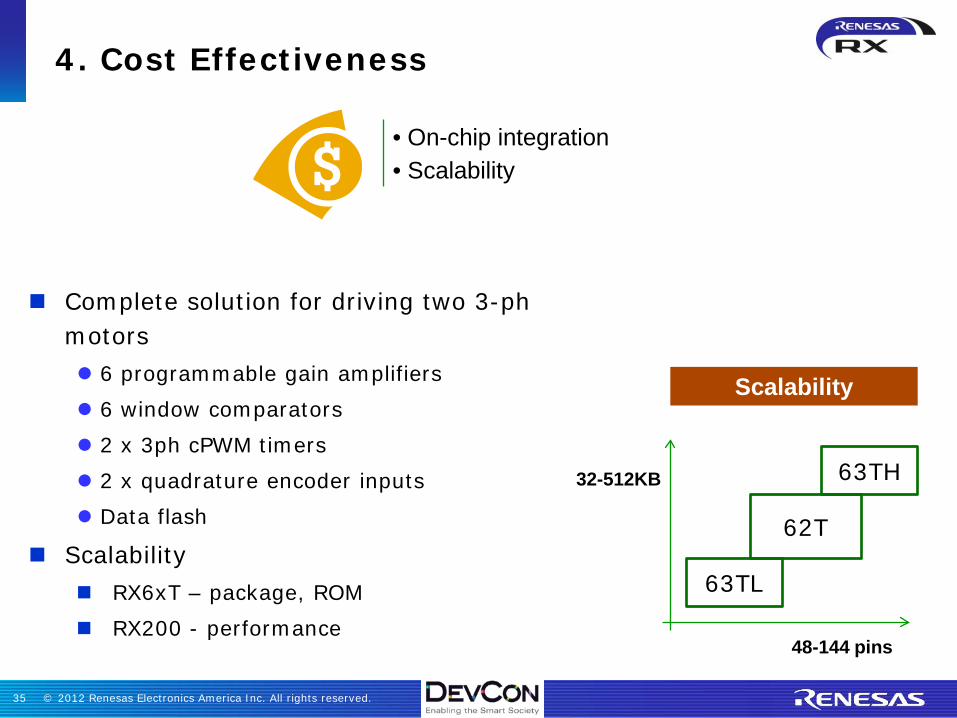
4. Cost Effectiveness
Complete solution for driving two 3-ph motors 6 programmable gain amplifiers 6 window comparators 2 x 3ph cPWM timers 2 x quadrature encoder inputs Data flash
Scalability RX6xT – package, ROM RX200 - performance
• On-chip integration• Scalability
48-144 pins
32-512KB
63TL
62T
63TH
Scalability
© 2012 Renesas Electronics America Inc. All rights reserved.36
Implementing Sensorless Vector Control Using RX62T
© 2012 Renesas Electronics America Inc. All rights reserved.37
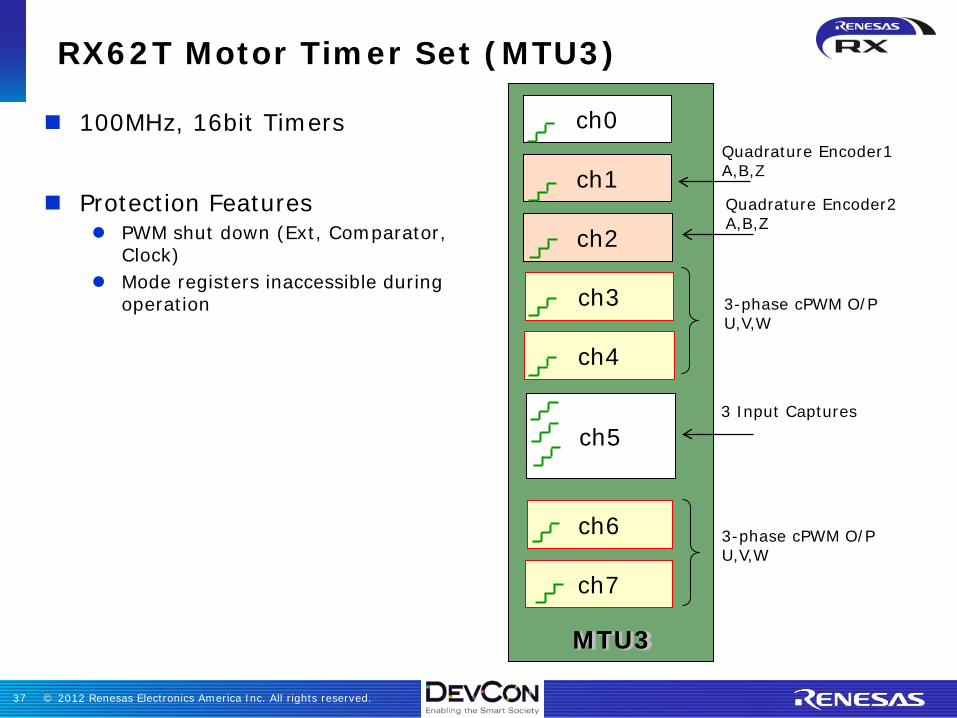
RX62T Motor Timer Set (MTU3)
100MHz, 16bit Timers
Protection Features PWM shut down (Ext, Comparator,
Clock) Mode registers inaccessible during
operation
ch0
ch1
ch2
ch3
ch4
ch5
MTU3
3-phase cPWM O/PU,V,W
ch6
ch7
3 Input Captures
3-phase cPWM O/PU,V,W
Quadrature Encoder1A,B,Z
Quadrature Encoder2A,B,Z
© 2012 Renesas Electronics America Inc. All rights reserved.38
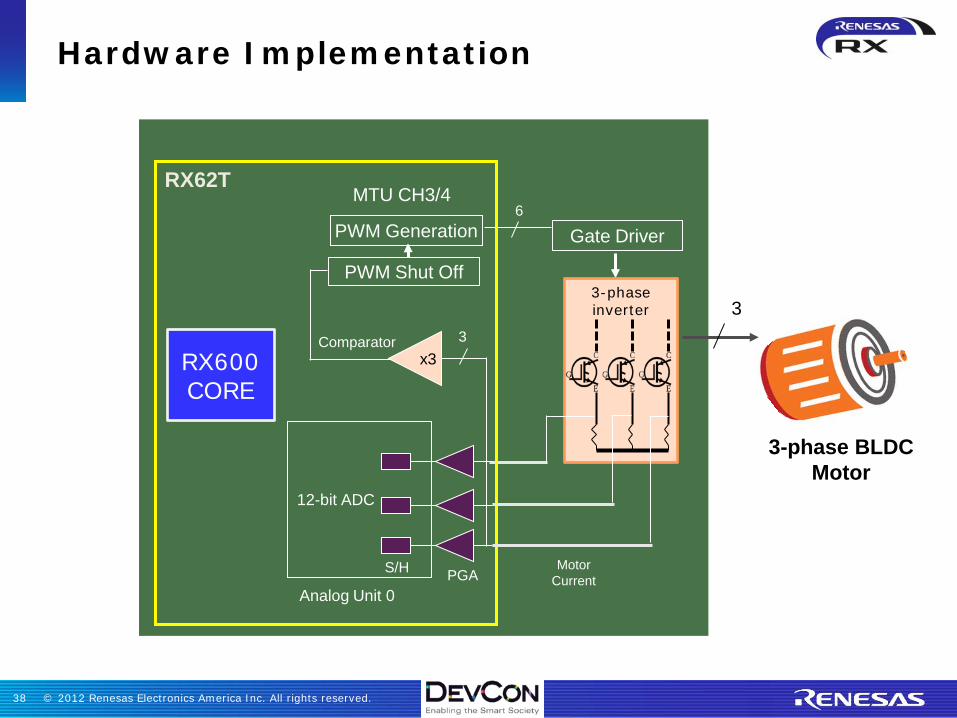
Hardware Implementation
Motor Current
6PWM Generation
PWM Shut Off
PGAS/H
12-bit ADC
Analog Unit 0
RX62T
RX600CORE
x3Comparator 3
3-phase inverter
Gate Driver
MTU CH3/4
3
3-phase BLDC Motor
© 2012 Renesas Electronics America Inc. All rights reserved.39
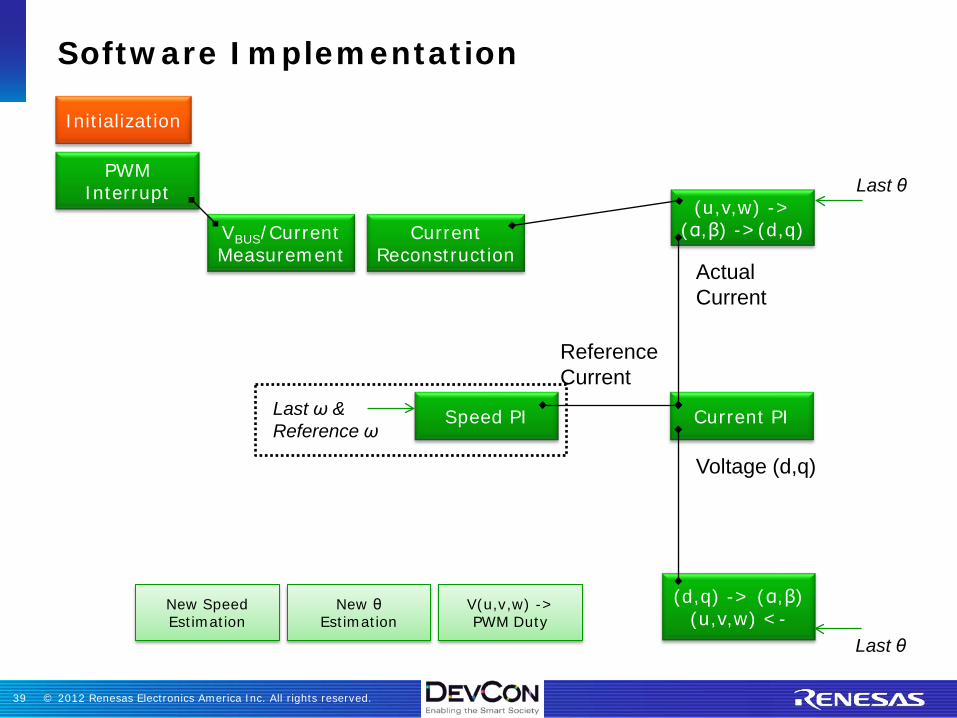
Software Implementation
Initialization
PWM Interrupt
Current Reconstruction
Speed PILast ω & Reference ω
V(u,v,w) -> PWM Duty
New θ Estimation
New Speed Estimation
Current PI
Voltage (d,q)
VBUS/Current Measurement
(u,v,w) -> (α,β) ->(d,q)
Last θ
Reference Current
Actual Current
(d,q) -> (α,β) (u,v,w) <-
Last θ
© 2012 Renesas Electronics America Inc. All rights reserved.40
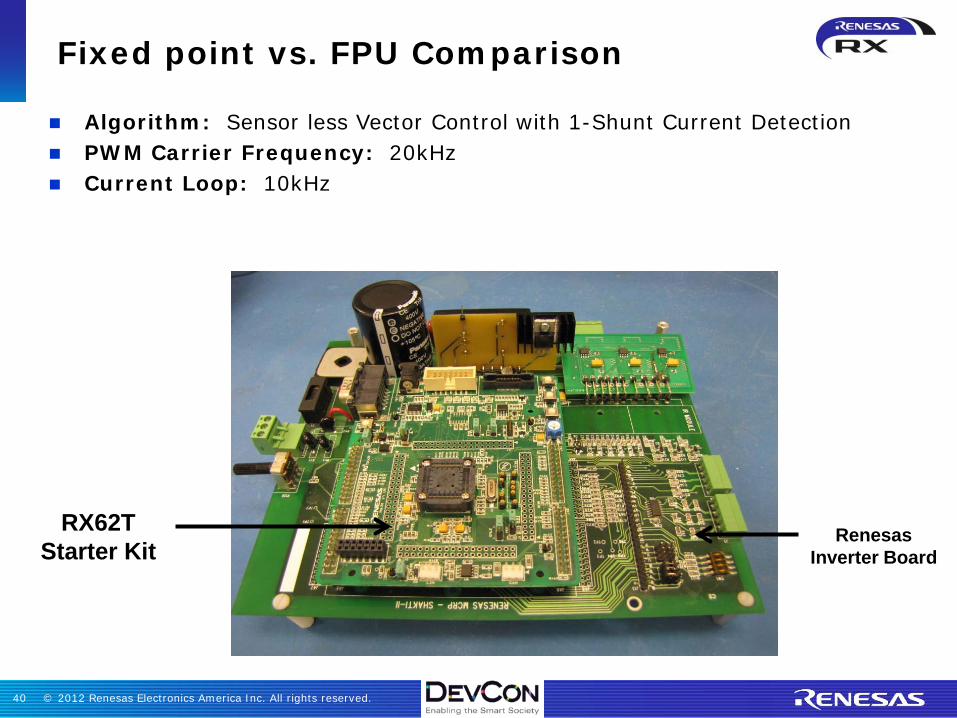
Fixed point vs. FPU Comparison
Algorithm: Sensor less Vector Control with 1-Shunt Current Detection PWM Carrier Frequency: 20kHz Current Loop: 10kHz
RenesasInverter Board
RX62T Starter Kit
© 2012 Renesas Electronics America Inc. All rights reserved.41
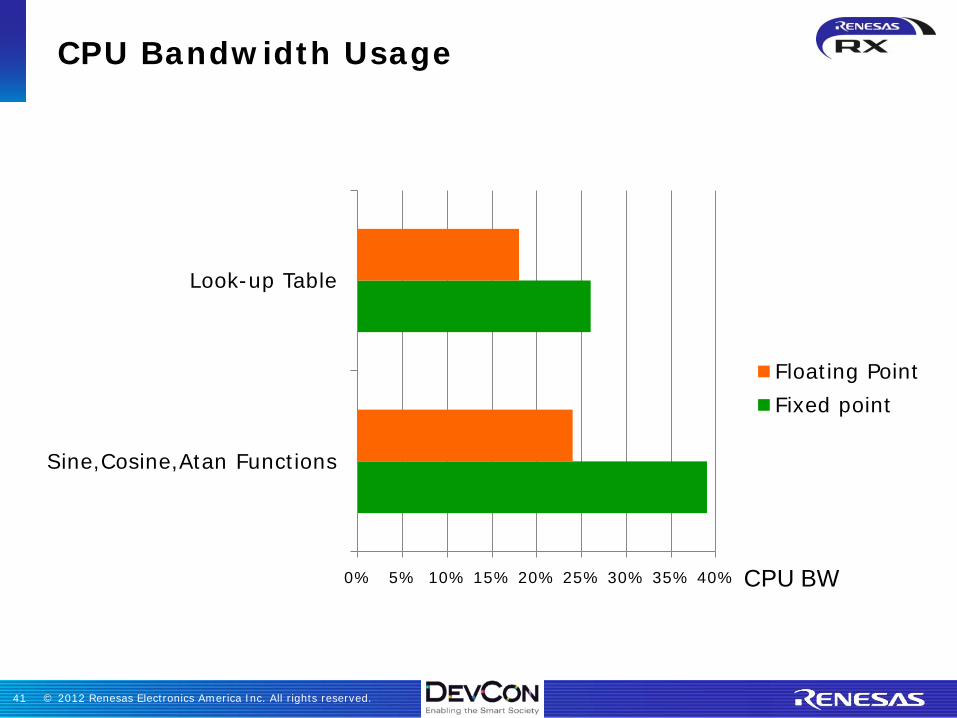
CPU Bandwidth Usage
0% 5% 10% 15% 20% 25% 30% 35% 40%
Sine,Cosine,Atan Functions
Look-up Table
Floating PointFixed point
CPU BW
© 2012 Renesas Electronics America Inc. All rights reserved.42
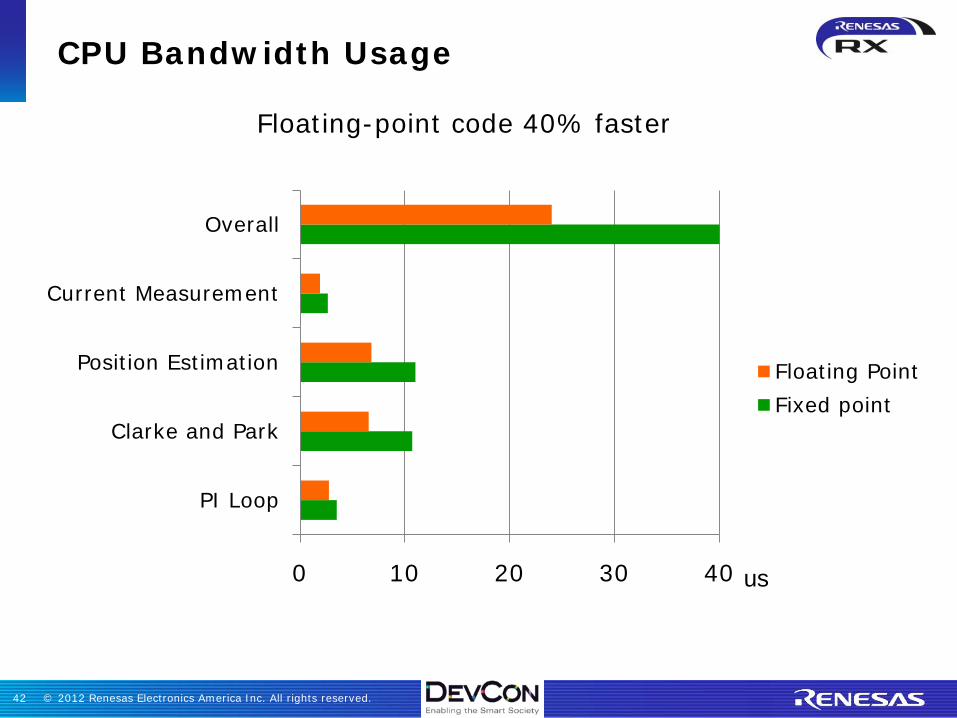
CPU Bandwidth Usage
0 10 20 30 40
PI Loop
Clarke and Park
Position Estimation
Current Measurement
Overall
Floating PointFixed point
us
Floating-point code 40% faster
© 2012 Renesas Electronics America Inc. All rights reserved.43
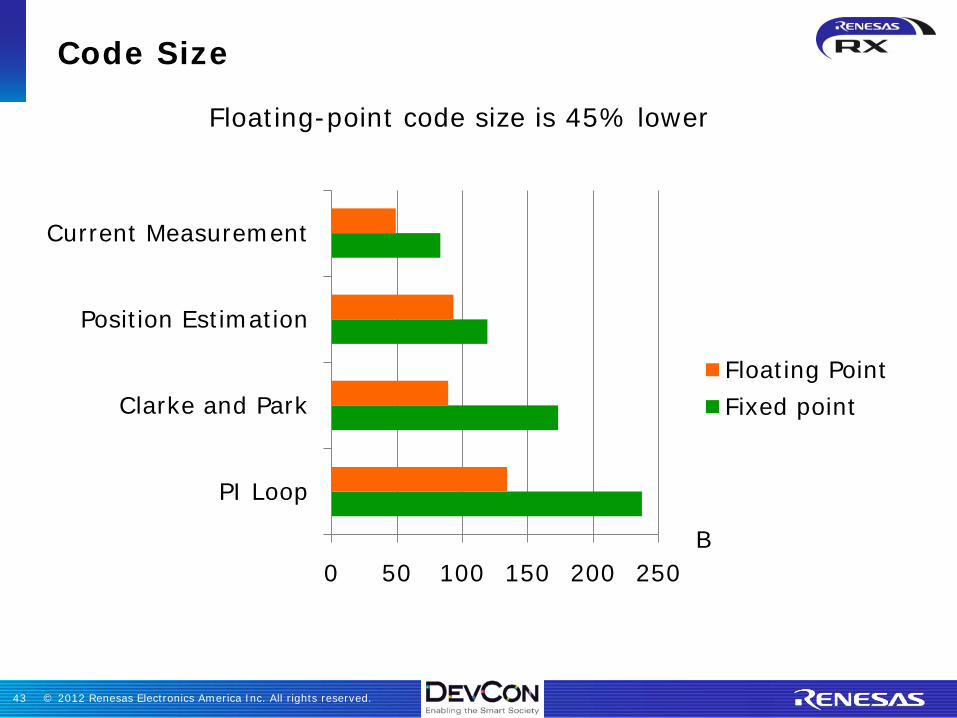
Code Size
0 50 100 150 200 250
PI Loop
Clarke and Park
Position Estimation
Current Measurement
Floating PointFixed point
Floating-point code size is 45% lower
B
© 2012 Renesas Electronics America Inc. All rights reserved.44
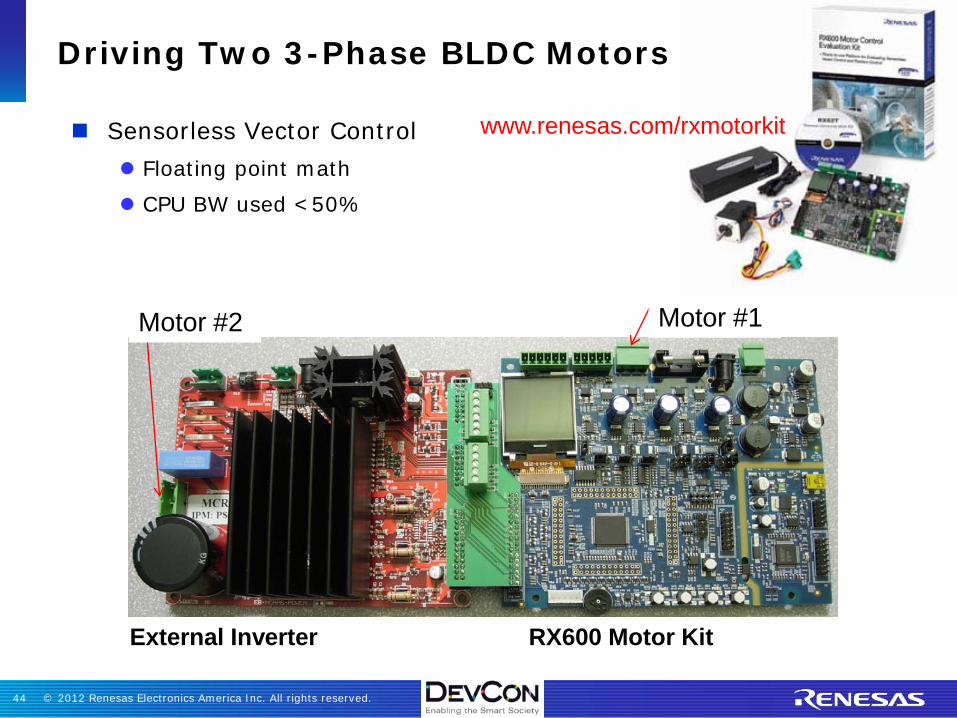
Driving Two 3-Phase BLDC Motors
RX600 Motor Kit External Inverter
www.renesas.com/rxmotorkit
Motor #2 Motor #1
Sensorless Vector Control Floating point math CPU BW used <50%
© 2012 Renesas Electronics America Inc. All rights reserved.45
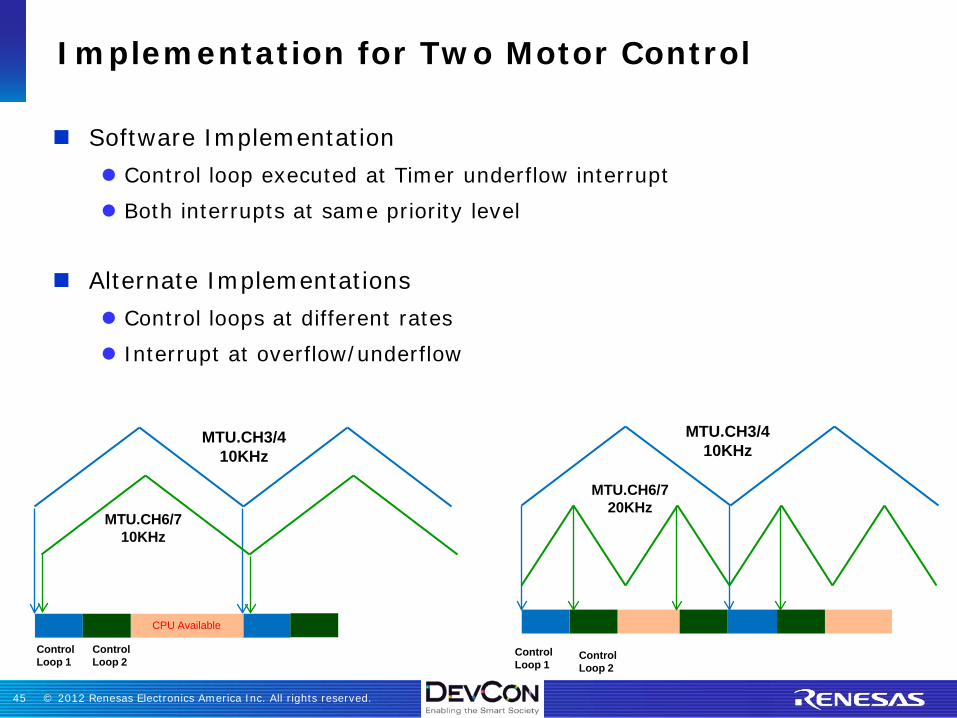
Implementation for Two Motor Control
Control Loop 1
Control Loop 2
CPU Available
MTU.CH3/410KHz
MTU.CH6/710KHz
Software Implementation Control loop executed at Timer underflow interrupt Both interrupts at same priority level
Alternate Implementations Control loops at different rates Interrupt at overflow/underflow
MTU.CH3/410KHz
MTU.CH6/720KHz
Control Loop 2
Control Loop 1
© 2012 Renesas Electronics America Inc. All rights reserved.46
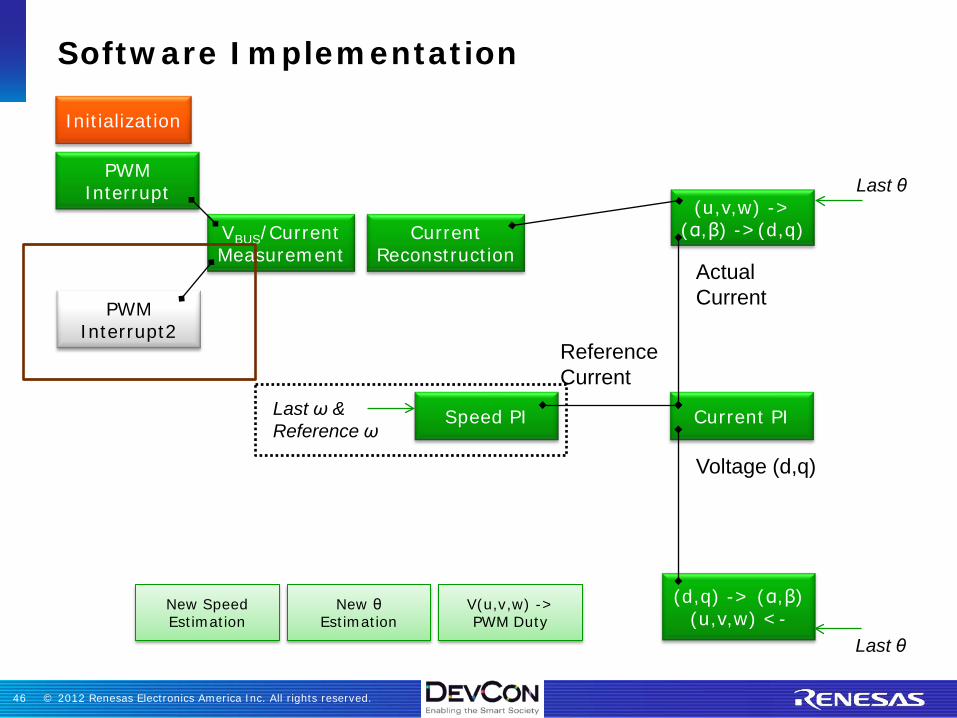
Software Implementation
Initialization
PWM Interrupt
Current Reconstruction
Speed PILast ω & Reference ω
V(u,v,w) -> PWM Duty
New θ Estimation
New Speed Estimation
Current PI
Voltage (d,q)
VBUS/Current Measurement
(u,v,w) -> (α,β) ->(d,q)
Last θ
Reference Current
Actual Current
(d,q) -> (α,β) (u,v,w) <-
Last θ
PWM Interrupt2
© 2012 Renesas Electronics America Inc. All rights reserved.47
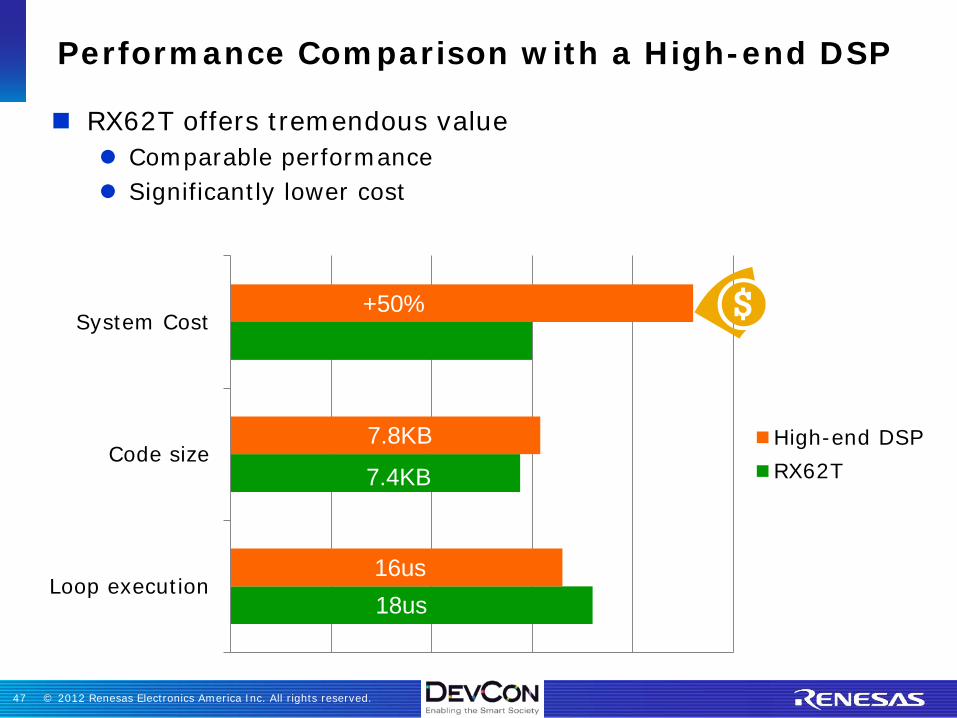
Performance Comparison with a High-end DSP
RX62T offers tremendous value Comparable performance Significantly lower cost
Loop execution
Code size
System Cost
High-end DSPRX62T
16us18us
+50%
7.8KB
7.4KB
© 2012 Renesas Electronics America Inc. All rights reserved.48
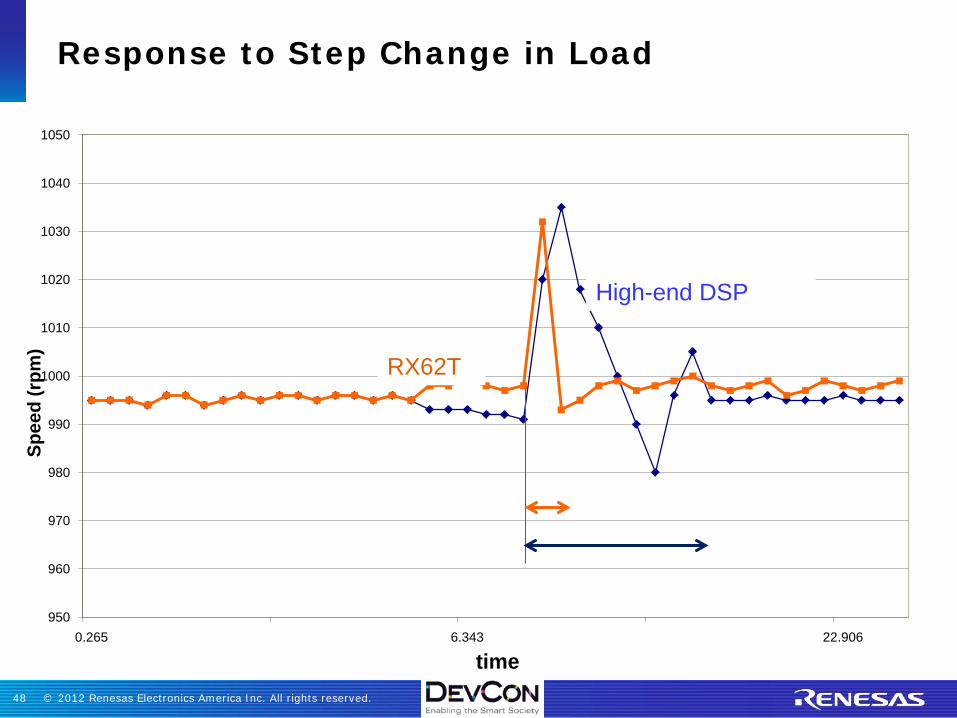
Response to Step Change in Load
950
960
970
980
990
1000
1010
1020
1030
1040
1050
0.265 6.343 22.906
Spee
d (r
pm)
time
High-end DSP
RX62T
© 2012 Renesas Electronics America Inc. All rights reserved.49
Renesas Motor Control Solutions
© 2012 Renesas Electronics America Inc. All rights reserved.50
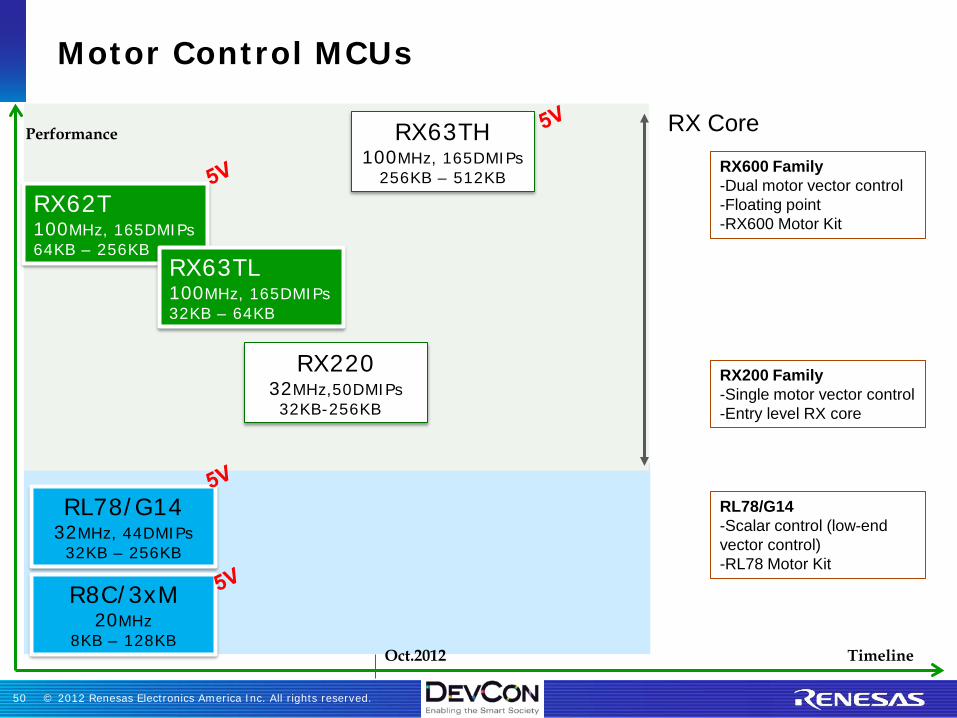
Motor Control MCUs
RX600 Family-Dual motor vector control-Floating point-RX600 Motor Kit
RX62T100MHz, 165DMIPs64KB – 256KB
RX22032MHz,50DMIPs32KB-256KB
RX200 Family-Single motor vector control-Entry level RX core
Timeline
Performance
RL78/G1432MHz, 44DMIPs
32KB – 256KB
RL78/G14-Scalar control (low-end vector control)-RL78 Motor Kit
RX Core
RX63TL100MHz, 165DMIPs32KB – 64KB
RX63TH100MHz, 165DMIPs
256KB – 512KB
R8C/3xM20MHz
8KB – 128KBOct.2012

© 2012 Renesas Electronics America Inc. All rights reserved.51
Evaluation Kits for Vector Control
Extensive Code Support Flexibility to Evaluate and Develop
GUI External Inverter Connector
RX600 Motor Kit RL78 Motor Kit
© 2012 Renesas Electronics America Inc. All rights reserved.52
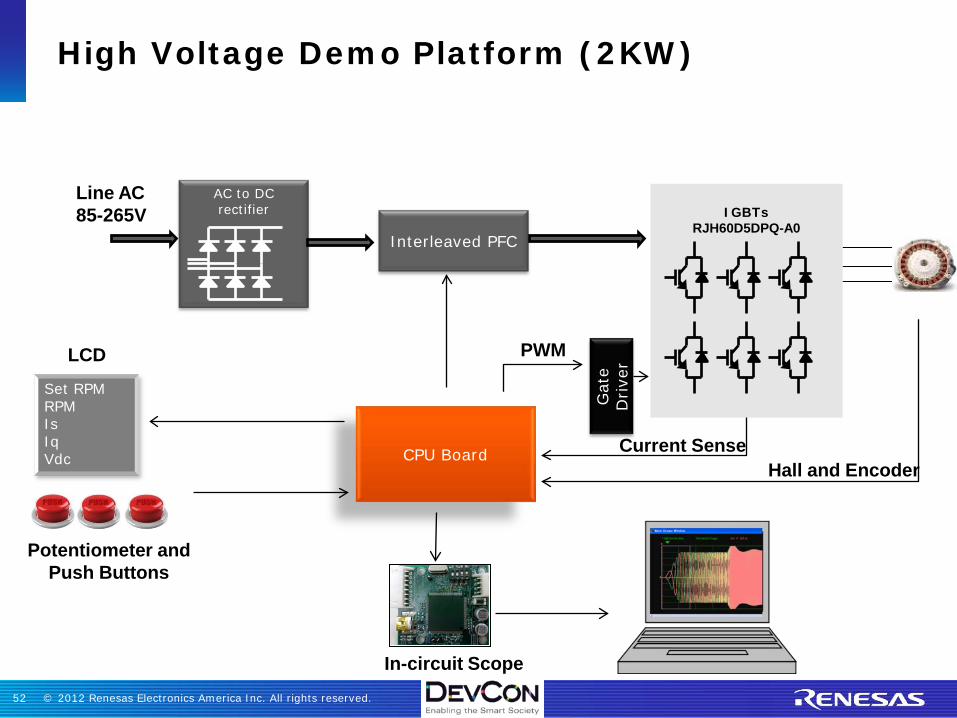
High Voltage Demo Platform (2KW)
IGBTsRJH60D5DPQ-A0
Interleaved PFC
AC to DC rectifier
Line AC 85-265V
CPU Board
Gat
e D
rive
r
PWM
Hall and EncoderCurrent Sense
In-circuit Scope
LCD
Potentiometer and Push Buttons
Set RPMRPMIsIqVdc

© 2012 Renesas Electronics America Inc. All rights reserved.53
2KW Inverter Platform
© 2012 Renesas Electronics America Inc. All rights reserved.54
Summary
Sensorless vector control improves the motor system efficiency
Implementing sensorless vector control requires careful selection of MCU
Renesas provides several motor control MCUs depending on the application requirements
RX600 and RL78 motor control kits are available for an easy evaluation of Renesas solutions
High voltage platforms are also available
© 2012 Renesas Electronics America Inc. All rights reserved.55
Questions?
© 2012 Renesas Electronics America Inc. All rights reserved.56
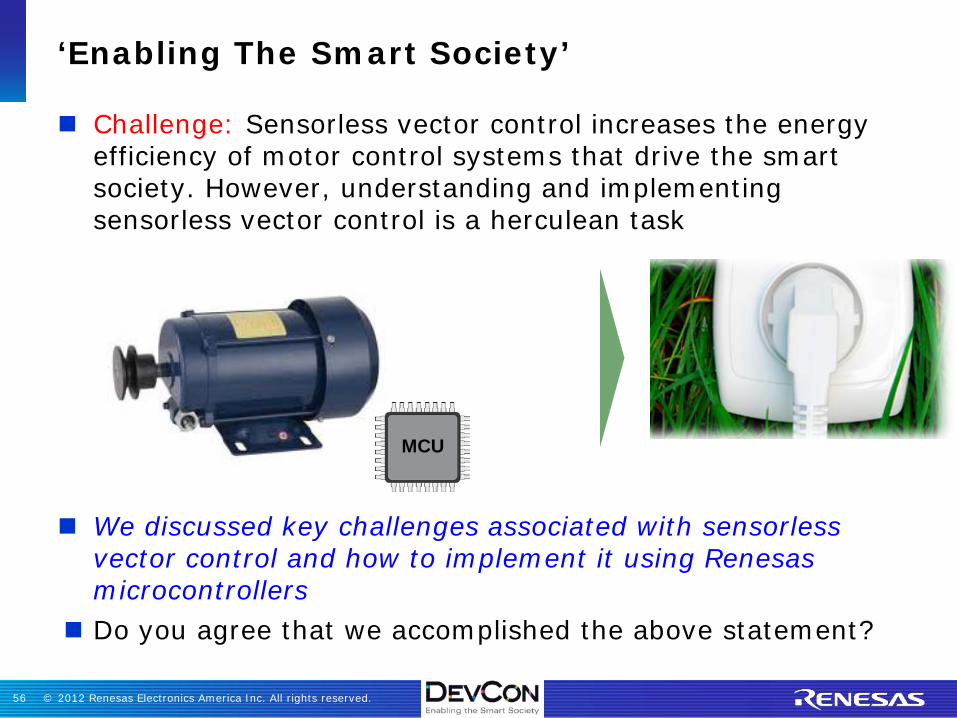
Challenge: Sensorless vector control increases the energy efficiency of motor control systems that drive the smart society. However, understanding and implementing sensorless vector control is a herculean task
We discussed key challenges associated with sensorlessvector control and how to implement it using Renesas microcontrollers
Do you agree that we accomplished the above statement?
‘Enabling The Smart Society’
MCU
Renesas Electronics America Inc.© 2012 Renesas Electronics America Inc. All rights reserved.





























