Embed Size (px)
Citation preview

Research ArticleA Soft Shadow Detection Method Based onMRF for Remote Sensing Images
Pengwei Li1 and Wenying Ge2
1School of Software Engineering Anyang Normal University Anyang 455000 China2School of Computer and Information Engineering Anyang Normal University Anyang 455000 China
Correspondence should be addressed to Wenying Ge xunzhaoxinyi126com
Received 24 October 2014 Revised 6 March 2015 Accepted 23 March 2015
Academic Editor Chih-Cheng Hung
Copyright copy 2015 P Li and W Ge This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
Shadows limitmany remote sensing applications such as classification target detection and change detectionMost current shadowdetection methods utilize the histogram threshold of spectral characteristics to distinguish the shadows and nonshadows directlycalled ldquohard binary shadowrdquo Obviously the performance of threshold-based methods heavily rely on the selected thresholdSimultaneously these threshold-basedmethods do not take any spatial information into account To overcome these shortcomingsa soft shadow description method is developed by introducing the concept of opacity into shadow detection and MRF-basedshadow detection method is proposed in order to make use of neighborhood information Experiments on remote sensing imageshave shown that the proposed method can obtain more accurate detection results
1 Introduction
Remote sensing images are applied in many fields becauseof the abundant information However shadows existinguniversally in these images obstruct these applications for thereduction or even loss of radiance in the shadow areas On theother hand shadows may provide some useful informationfor example building height which make them valuablein some applications such as building extraction surfacedeformation analysis Therefore shadow detection is anessential prestep in the remote sensing image processing Wetry to find a feasible shadow detection method by analyzingthe characteristics of shadows in remote sensing images
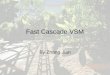
Various shadow detection methods have been exploredduring the last decades Most of these methods are basedon the histogram threshold of extracted spectral features ofshadow areas As shown in Figure 1 Jaynes et al [1] observedthat pixels in shadow areas have lower intensity and proposedan appropriate method using intensity threshold Polidorioet al [2] utilized the higher saturation of shadows combiningthe lower intensity to detect shadows in aerial color imagesAnd later Huang et al [3] used the property that pixels
in a shadow region usually have large hue value low bluecolor value and small difference between green and bluecolor values These works have obtained a variety of goodresults but some drawbacks are also blocking their detectionaccuracy For example dark objects may be misclassified asshadows while light ones in a shadow area may be treated asnonshadows Besides it is also rather difficult to distinguishthe deep green grass from shadows
In order to take full advantages of spectral features ofmultiband images invariant color spaces are often used tostress the differences between shadows and nonshadowsHaijian et al [4] used the special properties of shadows inHSV color space (ie high saturation low value) to detectshadows in high resolution satellite images and Arevalo et al[5] proposed a shadow detection method with a regiongrowing procedure in the C1C2C3 color space [6] Tsai [7]computed the ratio of hueintensity in several color spacesincluding HSI HSV HCV YIQ and YCbCr to deshadowcolor aerial imagesThesemethods did improve the detectionprecision but are still not robust enough to get satisfactoryresults To improve the performance of thresholdingmethodmany attempts have been proposed Yang et al [8] tried
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2015 Article ID 404095 11 pageshttpdxdoiorg1011552015404095
2 Mathematical Problems in Engineering
Thresholding method
Inspiration extract shadows (different features)
(1) Jaynes et al 2001 lower intensity(2) Polidorio et al 2003 higher hue and saturation(3) Huang et al 2004 small difference between green and blue
channels
Inspiration make full use of multiband images (different color spaces)
(4) Haijian et al 2008 HSV
(7) Tsai 2006 HIS HSV HCV YIQ and YCbCrand HIS the optimal choice for the proposed approach
Inspiration to improve the performance of thresholding
(8) Yang et al 2008 combine thresholds of different features(9) Liu and Xie 2013 performed the principal component
transformation
Inspiration to represent the nonuniform distributions of shadows
Soft shadow
(10) Wu et al 2007 distance between pixel features
Only applicable for single surface
(11) Liu and Yamazaki 2012 dark-shadow medium-shadow and
Discrete naturelight-shadow
(5) Ar evalo et al 2008 C1C2C3
Figure 1 Relationship of references
to combine thresholds of different features and Liu andXie [9] performed the principal component transforma-tion of extracted feature before using its histogram Thesemethods have achieved some good results in their intendedrealms
All the methods mentioned above are threshold-basedones Unfortunately it is a high-risk strategy to divide imagesonly by a specific threshold because in reality the extractedfeatures of shadows usually do not obey the uniform distribu-tion which makes the selection of a proper threshold moredifficult For example intensity values in penumbras andshadow boundaries are always between those in shadow andnonshadow areas It is hard to represent the actual situationsfor the thresholding methods Therefore a natural way todescribe image is using the soft manner for example thedegree of each pixel belonging to the shadow or not calledldquosoft shadowrdquo Wu et al [10] used the distance between apixel and a feature set to measure the soft degree Liu andYamazaki [11] divided shadows into three classes according
to the histogram dark-shadow medium-shadow and light-shadow There are some limits in these methods such asthe applicability only for the images with single land surfacein [10] and the discrete nature in [11] But the notion ofdescribing shadows with soft degree affords us a way torepresent the nonuniform distribution of shadows
Inspired by [10 11] we present a novel solution fordescribing the ldquosoft shadowrdquo by introducing the conceptof opacity of image matting into shadow detection andcombining it with the intensity Instead of using the thresh-olding method we propose an iterative detection methodbased on Markov random field model (MRF) [12] whichserves as a powerful formal tool to take advantage of theneighborhood interactions In our method the soft shadowmodel is employed to estimate the probability of features andMRF is utilized to model the distribution of label a prioriExperiments on four pieces of QuickBird remote sensingimages have shown that the proposed method can obtainmore accurate detection results
This paper is organized as follows the determination ofshadow probability is described in Section 2 followed bythe proposed MRF-based shadow detection method builtin Section 3 Extensive experimental results are reported inSection 4 Section 5 concludes the paper
2 Shadow Probability
As mentioned above the shadow is soft rather than hard forthe nonuniform distributions of spectral features in shadowareas In other words ldquosoft shadowrdquo is more appropriate todescribe the shadows in remote sensing images To measurethe degree of each pixel belonging to the shadow in this studythe concept of shadow probability is derived If the shadowprobability of a pixel is 1 that means it is a shadow pixel Onthe contrary the probability value of nonshadow pixel is 0For a pixel a value closer to 1 means the greater the chanceof being shadows In order to obtain appropriate probabilityvalues we proposed a novel shadow probability model whichcombined intensity and opacity together
21 Get the Probability by Intensity There are many differentspectral characteristics of shadows and among them thelower intensity is the primary one and as stated in [13] it isthe most consistent oneTherefore intensity is always chosento estimate the distance between shadow and nonshadowMeanwhile experiments in [7] had shown that theHSImodelwas the optimal choice for the proposed approach In fact thesuperiority ofHSI color spacemainly exists in that intensity isindependent of hue and saturation whichmakes HSI achievemore accurate intensity value Hence we transformed imagesinto HSI color space and use the intensity component todescribe shadow pixels To make the distinction betweenshadow and nonshadow areas more obvious the inversetangent transformation [13] is performed on the intensitycomponent
Let 119884 denote an intensity image defined on a 119898 times 119899
rectangular lattice set let1198841015840 denote the transformed intensityimage described later and let 119904 = 11 12 119894119895 119898119899
Mathematical Problems in Engineering 3
(a) (b)
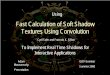
Figure 2 Intensity contrast (a) original intensity image and (b) transformed intensity image
denote the set of pixel sites Let the training shadow samplesbe denoted by 119905 = 119905
1 1199052 119905
119899 where 119905
119894is the site set of the
119894th sample Then the transformation can be described as
1198841015840= (
1
120587arctan 120577119889 + 05) lowast radic119884 (1)
where 119889 is the intensity distance between each pixel and themean of the shadow samples denoted by
119889 = 119910119894119895minus
sum119905119894isin119905119910119905119894
119899 (2)
where 119894119895 denotes the pixel site (119894 119895) and 119899 stands for the totalpixel number in the sample area
The inverse tangent function in (1) can enlarge the differ-ence between shadows and nonshadowsThe parameter 120577 is asensitivity factor adjusting the change speed whose empiricalvalue is 20 An example of this function is shown in Figure 2It can be seen that the intensity contrast in Figure 2(b)is more obvious than that in Figure 2(a)
Aiming at achieving a shadow probability for each pixelthe distance between the transformed intensity and meanintensity of the sample shadow areas is used to measurethe degree of each pixel belonging to the shadow Let 119883 =
11990911 11990912 119909
119898119899 (119909119894119895isin 1 2) denote the label field where
119909119894119895= 1 indicates that the pixel on site (119894 119895) is a shadow pixel
Then the shadow probability can be defined as
119875 (1198841015840
119894119895| 119883119894119895= 1) =
1198841015840
119894119895minus 120583119905
max119894119895isin119904(1198841015840
119894119895minus 120583119905)
(3)
where 120583119905is the mean value of sample areas in transformed
intensity image 1198841015840 Then the nonshadow probability isdescribed as
119875 (1198841015840
119894119895| 119883119894119895= 2) = 1 minus 119875 (119884
1015840
119894119895| 119883119894119895= 1) (4)
This probability is applicable when pixel intensities areobviously different However in most cases it is not accurateenough for shadow detection To improve the accuracy ofdetection result we introduce the concept of opacity of imagematting into shadow detection which will be introduced inthe next section
22 Introducing the Concept of Opacity Image matting is theprocess of extracting a foreground object from an image byestimating the foreground opacity [14] For shadowdetectionit aims at extracting shadows from an image therefore itis reasonable to regard shadows as foreground objects andintroduce the methods used in image mating to the field ofshadow detection
In image matting the color of the pixel on site (119894 119895)in channel 119888 is assumed to be a linear combination of thecorresponding foreground and background colors
119884119888
119894119895= 120572119894119895119865119888
119894119895+ (1 minus 120572
119894119895) 119861119888
119894119895 (5)
where 120572119894119895is the pixelrsquos foreground opacity and 119865119888
119894119895and 119861119888
119894119895
denote the foreground and the background It is a massivetask to estimate the foreground and the background colorsas well as the opacity A closed-form solution [13] is presentedto extract the alpha matte directly without requiring reliableestimates for 119865 and 119861 In this method alpha is computed as
120572 = arg min 120572119879119871120572 + 120582 (120572119879 minus 119887119879119904)119863119904(120572 minus 119887
119904) (6)
where 120582 is a large constant 119871 is a square matrix defined asmating Laplacian [14]119863
119904is a diagonalmatrix whose diagonal
elements are 1 for samplematrix and 0 for all other pixels and119887119904is the vector which consists of specified alpha values for
the sampled pixels and 0 for all others To describe shadowin a soft manner we suppose that shadow pixels are of theforeground and the nonshadow ones are of the backgroundThen the shadow probability can be denoted by alpha [14]
So the shadow probability using alpha is denoted by
119875 (119884120572
119894119895| 119883120572
119894119895= 1) = 120572
119894119895
119875 (119884120572
119894119895| 119883120572
119894119895= 2) = 1 minus 120572
119894119895
(7)
Finally taking into account both intensity and opacity theshadow probability can be described as
119875 (119884119894119895| 119883119894119895= 119896) =
119875(1198841015840
119894119895| 119883119894119895= 119896) 120575
119894119895le 120579
119875 (119884120572
119894119895| 119883120572
119894119895= 119896) 120575
119894119895gt 120579
(8)
4 Mathematical Problems in Engineering
Procedure detectShadow(119884)119886119897119901ℎ119886 larr solveAlpha(119884)lowastBy (6)lowastlowast119886119897119901ℎ119886 is an array records the parameter alpha for each pixel sitelowast119875(119884120572
119894119895| 119883120572
119894119895) larr 119886119897119901ℎ119886 lowastBy (7)lowast
1198841015840larrcolorTransform(119884)
119875(1198841015840
119894119895| 119883119894119895) larr 119884
1015840lowastBy (1)lowast119875(119884119894119895| 119883119894119895) larr 119875(119884
120572
119894119895| 119883120572
119894119895) 119875(1198841015840
119894119895| 119883119894119895)
lowastBy (8)lowastinitSeglarr histogramOpacity(119875(119884120572
119894119895| 119883120572
119894119895))
lowastObtain the initial segment according to the histogram of probability computed through the opacity lowastwhile (iter lemaxIter)lowastApply the feature condition probability iteratively until the algorithm reaches the maximum iteration number lowast119875(119883119894= 119896 | 119883
119873119894119895) larr priorPercent (seg 120573)
lowastBy Potts modellowastlowastIn the first iteration seg = initSeglowastseglarrMAPcriteria(119875(119884
119894119895| 119883119894119895) 119875(119883
119894= 119896 | 119883
119873119894119895))
lowastSegment the image into shadows and nonshadows using the MAP criterialowastEndwhile119877119890119904119906119897119905 = seg
Return 119877119890119904119906119897119905
Algorithm 1
where 119896 isin 1 2 and 120575119894119895= |120572119894119895minus(1minus120572
119894119895)| and the parameter 120579
whose value is decided by the histogram of 120575 is a parameterto adjust the effect of intensity and opacity when determiningthe shadow probability
3 MRF Shadow Detection Method
Aiming at partitioning an image into shadows area andnonshadows area the procedure of shadow detection canbe treated as a process of image labeling The thresholdingmethods label each pixel individually based on its intensityIt has some obvious defects The first one is its ignorance ofthe interaction information between neighbors which seri-ously impacts the detection accuracy Besides imprecisionis associated with remote sensing images inherently since apixel always represents an area of the land space which alsomakes the thresholding methods fail to retain enough infor-mation from the original images compared to soft methodsTherefore in this study aiming at obtaining more accuratedetection results we design a soft shadow detection methodby resorting to MRF to incorporate spatial information
Let 119884 denote an intensity image defined on a 119898 times 119899
rectangular lattice set and let 119883 = 11990911 11990912 119909
119898119899 denote
the label field where 119909119894119895isin 1 2 with 1 and 2 indicating
shadow area and nonshadow area respectively In theBayesian image segmentation framework the segmentedimage119883 is obtained by
119909119894119895= argmax
119909119894119895
119875 (119910119894119895| 119883119894119895= 119896) 119875 (119883
119894= 119896 | 119883
119873119894119895) (9)
where 119875(119910119894119895| 119883119894119895= 119896) is the class conditional probability
which represents the characteristics of extracted featuresof pixels In our proposed method the shadow probabilitydescribed in Section 2 is employed as the class conditional
probability 119875(119883119894= 119896 | 119883
119873119894119895) is the prior probability which
defines the interaction between each pixel and its neighborswhere119873
119894119895is the set of neighborhood pixels of pixel (119894 119895) Potts
model is a simple and efficient one to represent the interac-tions of neighboring pixels clearly Although some improvedcomplex Potts models have been proposed the classicalmodel is sufficient enough to this study Therefore for sim-plicity without loss of generality we employ the classical Pottsmodel to describe the label field119883 in our proposed method
Given a remote sensing image 119884 in the visible spectrumthe training samples can be obtained by scribbling differentlines on shadow area and nonshadow area respectively Afterthat the opacity can be estimated by (6) Then the inputimage is transformed into the HSI color space to get thecorresponding transformed intensity image Based on thisthe shadow probabilities are computed and applied in ouriterative shadow extraction procedure
The details of our proposedMRF-based shadowdetectionalgorithm are described as in Algorithm 1
4 Experiments and Discussion
In this section we show the experimental results for verifyingthe performance of the proposed method We implementedall these algorithms in MatLab 2009a The present experi-ments were performed on a personal computer with an IntelPentium Dual-Core 22GHz CPU and 8G random accessMemory under the Microsoft Windows 7 environment
41 Data Sets To evaluate the performance of proposedshadow detection method four pieces of QuickBird urbanimages were chosen The first image shown in Figure 3(a)which is acquired in September 2003 refers to a 280 times 280pixel image in the visible spectrum It mainly consists of grass
Mathematical Problems in Engineering 5
(a) (b)
(c) (d)
Figure 3 Results of different neighborhood size (a) The first QB image (b) result of 3 times 3 (c) result of 5 times 5 and (d) result of 7 times 7
areas buildings and their shadows The next two imagesshow different scenes of Beijing acquired in May 2011 andApril 2011 respectively and their sizes are 300 times 300 and280 times 280 (see Figures 5(a) and 6(a)) They mainly containroads trees grass buildings blue roofs and shadows of treesand buildings The fourth image represents a crop of 256 times256 pixels of the Wuhan University acquired in 2004 (seeFigure 7(a)) There are six land covers roads bared landtrees buildings water and shadows
The main variation among the selected scenes is thecomplexity of scenes contents For example types of landcovers in the first image (Figure 3(a)) are less than the othersMeanwhile in the first image shadows mainly obscured bybuildings are relatively larger whereas in ldquoWuhanUniversityrdquoimage (Figure 7(a)) there are many fragmental tree shadowsin addition to building shadows This different complexitycan affect the performance of our proposed shadow detectionmethod which will be discussed later
42 Parameter Setting Some parameters in our experimentswere chosen empirically In detail 120577 = 20 for intensity trans-form function and 120573 = 03 for Potts model Howeverthe parameter 120579 used in the shadow probability functionshould be set in accordance with specific images because itsvalue is determined by the histogram of 120575 as mentioned inSection 22 In our experiments 098 091 088 and 095 areset as the values of 120579 for Figures 3(a) 5(a) 6(a) and 7(a)respectively
Another important parameter in the proposed MRF-based method is the size of neighborhood Three shadowdetection experiments using different neighborhood sizesnamely 3 times 3 5 times 5 and 7 times 7 were performed on the firstimage And the results shown in Figure 3 represent that thebest choice should be 3 times 3 because it can preserve as muchas possible the image details So such a neighborhood sizehas been adopted in all the following experiments
43 Experiment Setup Before running our detectionmethod a sample image should be prepared by scribblingnonshadows in black and shadows in white In order toget enough samples white scribbles should be placedon all different kinds of land surfaces in shadow areasSimultaneously black scribbles for the nonshadow samplesshould mark all the regions that should not be mixed withshadows
In order to obtain the shadow probability two proceduresare performed one for computing the probability by theopacity image and the other for the transformed intensityimage Figure 4(b) shows the detection result on the first QBimage of shadow probability model using opacity only whileFigure 4(c) displays the result using transformed intensityonly As seen from Figure 4(b) the detection has lost somelittle shadow areas and misclassified some nonshadow pixelsas shadows ones The main reason lies in the insufficiencyof samples in corresponding areas Obviously it is notsufficient to reply on opacity only Simultaneously Figure 4(c)
6 Mathematical Problems in Engineering
(a) (b)
(c) (d)
Figure 4 Results using different probability models (a) the ground truth of the first QB image (b) opacity only (c) intensity only and (d)the proposed soft shadow model
shows that detection using intensity only gets many speckledshadows caused by dark pixels on trees or buildings
Then the final shadow probability is obtained by combin-ing the opacity with transformed intensity As expected theresult using the final probability has obviously less misclas-sifications which is shown in Figure 4(d) In summary thesuperiority of our novel soft shadow model is clearly demon-strated by the comparison of the results shown in Figure 4
44 Results and Discussions
441 Comparative Method In order to verify the superiorityof the proposed shadow detection method to the threshold-ing ones three methods are employed as the competitorsbithreshold method [8] PCAHSI [9] and HI method [7]
(i) Bithreshold method [8] firstly transform the imageinto HIS color space compute the normalized differ-ence of intensity (119868) and saturation (119878) componentsand obtain the initial detection by its thresholdThenget the detection result of 119868 channel by histogramthreshold The final result is obtained by performingAND operation on two detected results mentionedabove
(ii) PCAHSI [9] firstly compute the shadow index (SI)based on principal component transformation and
HIS model Then image is divided into the shadowarea and nonshadow area by SI histogram threshold
(iii) HI method [7] firstly compute the ratio of HI inHSI color space and get initial result by HI thresh-old Then obtain a shape mask by applying a Sobeloperator on the 119868 component Finally by overlappingthe shape mask with the existing shadow mask ofshadowed regions from the logical AND operator ashape-preserved shadow mask is derived
442 Visual Comparison Figures 5 and 6 present the resultson ldquoBeijing scenerdquo images of our proposed method and thecompetitive ones In these experiments the correspondingground truth images (Figures 5(c) and 6(c)) are obtainedby careful photo interpretation Subfigures (d)ndash(g) in bothFigures 5 and 6 show the detection results of bithresholdmethod PCAHSI HI method and the proposed methodrespectively As seen fromFigure 5 the thresholdingmethodsmake seriousmisclassification because the intensity of trees isvery similar to that of shadows Only by using the histogramthresholds the thresholdingmethods are not efficient enoughto distinguish between trees and shadows accurately whilethe proposed method describes each pixel with shadowprobability and decides whether a pixel is a shadow one ornot by considering the neighbor information Therefore theproposed method appears to be the most satisfactory one
Mathematical Problems in Engineering 7
(a) (b) (c)
(d) (e) (f)
(g)
Figure 5 Results on ldquoBeijing scene 1rdquo (a) The QB image (b) sample image (c) the ground truth (d) bithreshold (e) PCAHSI (f) HI and(g) proposed method
The comparison between Figures 6(d)ndash6(f) and 6(g)shows that our proposed method is obviously superior tothe referenced ones The competitive results show manymisclassified speckle noises In these noises some are causedby small dark objects in nonshadow areas and others arecaused by the fragmented shadow of trees As the purposeof the present work is to separate the shadows from theirproducer those are consider as noises However this prob-lem is solved in Figure 6(g) where small misclassificationislands are eliminated by the spatial information betweenneighboring pixels Moreover in Figures 6(d)ndash6(f) somehigh intensity objects in shadow areas are misclassified as
nonshadows which shows that the hard shadow modelscannot accurately represent the nonuniform distributionsof spectral features in shadow areas On the contrary themisclassifications in Figure 6(g) are greatly reduced whichmainly benefits from the accurate nonuniform descriptioncapability of the proposed shadow probability model and thepowerful spatial modeling ability of the MRF used in ourmethod
443 Quantitative Comparisons To obtain a quantitativecomparison between different algorithms both recall andprecision are employed as indicators Recall represents how
8 Mathematical Problems in Engineering
(a) (b) (c)
(d) (e) (f)
(g)
Figure 6 Results on ldquoBeijing scene 2rdquo (a) The QB image (b) sample image (c) the ground truth (d) bithreshold (e) PCAHSI (f) HI and(g) proposed method
many true shadowpixels have been detected as shadowpixelswhich is denoted by
DR =119873119888
119873119905
times 100 (10)
where 119873119905is the number of true shadow pixels which is
counted from a true shadow mask obtained by careful photointerpretation manually and 119873
119888is the number of pixels
correctly detected which is computed by performing ANDoperation on the detected result and the true shadow mask
Precision indicates how many shadow pixels have beendetected correctly which is denoted by
DP =119873119888
119873119889
times 100 (11)
where119873119889is the number of pixels labeled as shadow
From the definition it is easy to conclude that the recallfavors overdetection and the precision favors underdetectionThat is to say high recall combined with a low precisionmeans overdetection shadows
Mathematical Problems in Engineering 9
(a) (b) (c)
(d) (e) (f)
(g)
Figure 7 Results on ldquoWuhan Universityrdquo image (a) The QB image (b) sample image (c) the ground truth (d) bithreshold (e) PCAHSI (f)HI and (g) proposed method
We applied all competitive algorithms and proposedmethod on a ldquoWuhan Universityrdquo QB image shown inFigure 7 Correspondingly we measured the recall and pre-cision of each method and listed their values in Table 1
As seen from Table 1 recall of bithreshold and PCAHSImethods is 1 whereas their precision is only 04601 and05645 respectively which shows that bothmethods obtainedoverdetection results The similar results can also be foundin Figures 7(d) and 7(e) Although the HI method achievedmore accurate result (shown in Figure 7(f)) compared tobithreshold and PCAHSI it still produces serious misdetec-tion islands in the final map From the quantitative resultsas shown in Table 1 it is easy to conclude that the proposed
Table 1 Recall and precision of ldquoWuhan Universityrdquo image
Method Bithreshold PCAHSI HI ProposedDR 1 1 07320 09882DP 04601 05645 06741 07890
method can obtain more accurate shadow detection resultsthan the competitors for its shadow probability models
45 Limits By carefully observing the detection results of theproposedmethod on different images (Figures 5(g) 6(g) and7(g)) we can found that the more complex the surface is
10 Mathematical Problems in Engineering
(a) (b)
(c) (d)
Figure 8 Results on images with different surface (a) The first QB image (b) ldquoWuhan Universityrdquo image (c) result on (a) and (d) result on(b)
Table 2 Recall and precision of images with different surface
Image First QB image Wuhan UniversityDR 1 09882DP 08961 07890
the more dissatisfactory the result will be In order to givea quantitative evaluation we compared the results on thefirst QB image and ldquoWuhan Universityrdquo image (see Figure 8)Their values of recall and precision are listed in Table 2
As mentioned in Section 41 the first QB image containsonly three types of land covers while ldquoWuhan Universityrdquoimage consists of six different types Accordingly the recalland precision for the first QB image are 1 and 08961 respec-tively These values for ldquoWuhan Universityrdquo image descendto 09882 and 078901 respectively The main reason is thatit is hard to provide sufficient samples in a complex imageWhenwe scribbled samples pixels belonging to different landcovers may be selected as the training samples Even worsepixels of the same land covers but with different intensity forexample the light buildings and dark buildings may also beselected A possible way to eliminate this limit is to jointly usethe shape of sample land covers And this may be our futurework
5 Conclusions
In this paper we focus on the design of a soft shadowdescription method where both intensity and opacity areemployed to estimate a soft degree for each pixel to measurethe extent of belonging to shadows Based on the softshadow description MRF-based iterative detection methodis proposed to make full use of the interactions betweenneighboring pixels The proposed method is tested on fourpieces ofQuickBird remote sensing imagesThe experimentalresults have demonstrated that the proposed method canobtain more accurate results compared to three competitors
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is supported in part by the National NaturalScience Foundation of China under Grants 41001251 theKey Technology Projects of Henan province of China (no132102210212) the Key Technology Projects of the Edu-cational Department of Henan Province of China (no
Mathematical Problems in Engineering 11
13A520011) and the Excellent Youth Teacher of Henan Edu-cational Department of China (2011)
References
[1] C Jaynes S Webb R M Steele M Brown and W B SealesldquoDynamic shadow removal from front projection displaysrdquo inProceedings of the IEEEConference onVisualization pp 175ndash182October 2001
[2] A M Polidorio F C Flores N N Imai et al ldquoAutomaticshadow segmentation in aerial color imagesrdquo in Proceedings ofthe 16th Brazilian Symposium on Computer Graphics and ImageProcessing (SIBGRAPI rsquo03) pp 270ndash277 October 2003
[3] J Huang W Xie and L Tang ldquoDetection of and compensationfor shadows in colored urban aerial imagesrdquo in Proceedings ofthe 5th World Congress on Intelligent Control and Automation(WCICA rsquo04) vol 4 pp 3098ndash3100 June 2004
[4] MHaijianQQiming and S Xinyi ldquoShadow segmentation andcompensation in high resolution satellite imagesrdquo in Proceed-ings of the IEEE International Geoscience and Remote SensingSymposium pp II1036ndashII1039 Boston Mass USA usa July2008
[5] V Arevalo J Gonzalez and G Ambrosio ldquoShadow detection incolour high-resolution satellite imagesrdquo International Journal ofRemote Sensing vol 29 no 7 pp 1945ndash1963 2008
[6] T Gevers and A W M Smeulders ldquoColor-based object recog-nitionrdquo Pattern Recognition vol 32 no 3 pp 453ndash464 1999
[7] V J D Tsai ldquoA comparative study on shadow compensation ofcolor aerial images in invariant color modelsrdquo IEEE Transac-tions on Geoscience and Remote Sensing vol 44 no 6 pp 1661ndash1671 2006
[8] J Yang Z Zhao and J Yang ldquoA shadow removal methodfor high resolution remote sensing imagerdquo Geomatics andInformation Science of Wuhan University vol 33 no 1 pp 17ndash20 2008
[9] H Liu andTXie ldquoStudy on shadowdetection in high resolutionremote sensing image of PCA and HIS modelrdquo Remote SensingTechnology and Application vol 28 no 1 pp 78ndash84 2013
[10] T-P Wu C-K Tang M S Brown and H-Y Shum ldquoNaturalshadow mattingrdquo ACM Transactions on Graphics vol 26 no 2pp 377ndash388 2007
[11] W Liu and F Yamazaki ldquoObject-based shadow extraction andcorrection of high-resolution optical satellite imagesrdquo IEEEJournal of Selected Topics in Applied Earth Observations andRemote Sensing vol 5 no 4 pp 1296ndash1302 2012
[12] J Besag ldquoStatistical analysis of nonlattice datardquoThe Statisticianvol 24 no 3 pp 179ndash195 1975
[13] J Liu T Fang and D Li ldquoShadow detection in remotelysensed images based on self-adaptive feature selectionrdquo IEEETransactions on Geoscience and Remote Sensing vol 49 no 12pp 5092ndash5103 2011
[14] A Levin D Lischinski and YWeiss ldquoA closed-form solution tonatural image mattingrdquo IEEE Transactions on Pattern Analysisand Machine Intelligence vol 30 no 2 pp 228ndash242 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
Thresholding method
Inspiration extract shadows (different features)
(1) Jaynes et al 2001 lower intensity(2) Polidorio et al 2003 higher hue and saturation(3) Huang et al 2004 small difference between green and blue
channels
Inspiration make full use of multiband images (different color spaces)
(4) Haijian et al 2008 HSV
(7) Tsai 2006 HIS HSV HCV YIQ and YCbCrand HIS the optimal choice for the proposed approach
Inspiration to improve the performance of thresholding
(8) Yang et al 2008 combine thresholds of different features(9) Liu and Xie 2013 performed the principal component
transformation
Inspiration to represent the nonuniform distributions of shadows
Soft shadow
(10) Wu et al 2007 distance between pixel features
Only applicable for single surface
(11) Liu and Yamazaki 2012 dark-shadow medium-shadow and
Discrete naturelight-shadow
(5) Ar evalo et al 2008 C1C2C3
Figure 1 Relationship of references
to combine thresholds of different features and Liu andXie [9] performed the principal component transforma-tion of extracted feature before using its histogram Thesemethods have achieved some good results in their intendedrealms
All the methods mentioned above are threshold-basedones Unfortunately it is a high-risk strategy to divide imagesonly by a specific threshold because in reality the extractedfeatures of shadows usually do not obey the uniform distribu-tion which makes the selection of a proper threshold moredifficult For example intensity values in penumbras andshadow boundaries are always between those in shadow andnonshadow areas It is hard to represent the actual situationsfor the thresholding methods Therefore a natural way todescribe image is using the soft manner for example thedegree of each pixel belonging to the shadow or not calledldquosoft shadowrdquo Wu et al [10] used the distance between apixel and a feature set to measure the soft degree Liu andYamazaki [11] divided shadows into three classes according
to the histogram dark-shadow medium-shadow and light-shadow There are some limits in these methods such asthe applicability only for the images with single land surfacein [10] and the discrete nature in [11] But the notion ofdescribing shadows with soft degree affords us a way torepresent the nonuniform distribution of shadows
Inspired by [10 11] we present a novel solution fordescribing the ldquosoft shadowrdquo by introducing the conceptof opacity of image matting into shadow detection andcombining it with the intensity Instead of using the thresh-olding method we propose an iterative detection methodbased on Markov random field model (MRF) [12] whichserves as a powerful formal tool to take advantage of theneighborhood interactions In our method the soft shadowmodel is employed to estimate the probability of features andMRF is utilized to model the distribution of label a prioriExperiments on four pieces of QuickBird remote sensingimages have shown that the proposed method can obtainmore accurate detection results
This paper is organized as follows the determination ofshadow probability is described in Section 2 followed bythe proposed MRF-based shadow detection method builtin Section 3 Extensive experimental results are reported inSection 4 Section 5 concludes the paper
2 Shadow Probability
As mentioned above the shadow is soft rather than hard forthe nonuniform distributions of spectral features in shadowareas In other words ldquosoft shadowrdquo is more appropriate todescribe the shadows in remote sensing images To measurethe degree of each pixel belonging to the shadow in this studythe concept of shadow probability is derived If the shadowprobability of a pixel is 1 that means it is a shadow pixel Onthe contrary the probability value of nonshadow pixel is 0For a pixel a value closer to 1 means the greater the chanceof being shadows In order to obtain appropriate probabilityvalues we proposed a novel shadow probability model whichcombined intensity and opacity together
21 Get the Probability by Intensity There are many differentspectral characteristics of shadows and among them thelower intensity is the primary one and as stated in [13] it isthe most consistent oneTherefore intensity is always chosento estimate the distance between shadow and nonshadowMeanwhile experiments in [7] had shown that theHSImodelwas the optimal choice for the proposed approach In fact thesuperiority ofHSI color spacemainly exists in that intensity isindependent of hue and saturation whichmakes HSI achievemore accurate intensity value Hence we transformed imagesinto HSI color space and use the intensity component todescribe shadow pixels To make the distinction betweenshadow and nonshadow areas more obvious the inversetangent transformation [13] is performed on the intensitycomponent
Let 119884 denote an intensity image defined on a 119898 times 119899
rectangular lattice set let1198841015840 denote the transformed intensityimage described later and let 119904 = 11 12 119894119895 119898119899
Mathematical Problems in Engineering 3
(a) (b)
Figure 2 Intensity contrast (a) original intensity image and (b) transformed intensity image
denote the set of pixel sites Let the training shadow samplesbe denoted by 119905 = 119905
1 1199052 119905
119899 where 119905
119894is the site set of the
119894th sample Then the transformation can be described as
1198841015840= (
1
120587arctan 120577119889 + 05) lowast radic119884 (1)
where 119889 is the intensity distance between each pixel and themean of the shadow samples denoted by
119889 = 119910119894119895minus
sum119905119894isin119905119910119905119894
119899 (2)
where 119894119895 denotes the pixel site (119894 119895) and 119899 stands for the totalpixel number in the sample area
The inverse tangent function in (1) can enlarge the differ-ence between shadows and nonshadowsThe parameter 120577 is asensitivity factor adjusting the change speed whose empiricalvalue is 20 An example of this function is shown in Figure 2It can be seen that the intensity contrast in Figure 2(b)is more obvious than that in Figure 2(a)
Aiming at achieving a shadow probability for each pixelthe distance between the transformed intensity and meanintensity of the sample shadow areas is used to measurethe degree of each pixel belonging to the shadow Let 119883 =
11990911 11990912 119909
119898119899 (119909119894119895isin 1 2) denote the label field where
119909119894119895= 1 indicates that the pixel on site (119894 119895) is a shadow pixel
Then the shadow probability can be defined as
119875 (1198841015840
119894119895| 119883119894119895= 1) =
1198841015840
119894119895minus 120583119905
max119894119895isin119904(1198841015840
119894119895minus 120583119905)
(3)
where 120583119905is the mean value of sample areas in transformed
intensity image 1198841015840 Then the nonshadow probability isdescribed as
119875 (1198841015840
119894119895| 119883119894119895= 2) = 1 minus 119875 (119884
1015840
119894119895| 119883119894119895= 1) (4)
This probability is applicable when pixel intensities areobviously different However in most cases it is not accurateenough for shadow detection To improve the accuracy ofdetection result we introduce the concept of opacity of imagematting into shadow detection which will be introduced inthe next section
22 Introducing the Concept of Opacity Image matting is theprocess of extracting a foreground object from an image byestimating the foreground opacity [14] For shadowdetectionit aims at extracting shadows from an image therefore itis reasonable to regard shadows as foreground objects andintroduce the methods used in image mating to the field ofshadow detection
In image matting the color of the pixel on site (119894 119895)in channel 119888 is assumed to be a linear combination of thecorresponding foreground and background colors
119884119888
119894119895= 120572119894119895119865119888
119894119895+ (1 minus 120572
119894119895) 119861119888
119894119895 (5)
where 120572119894119895is the pixelrsquos foreground opacity and 119865119888
119894119895and 119861119888
119894119895
denote the foreground and the background It is a massivetask to estimate the foreground and the background colorsas well as the opacity A closed-form solution [13] is presentedto extract the alpha matte directly without requiring reliableestimates for 119865 and 119861 In this method alpha is computed as
120572 = arg min 120572119879119871120572 + 120582 (120572119879 minus 119887119879119904)119863119904(120572 minus 119887
119904) (6)
where 120582 is a large constant 119871 is a square matrix defined asmating Laplacian [14]119863
119904is a diagonalmatrix whose diagonal
elements are 1 for samplematrix and 0 for all other pixels and119887119904is the vector which consists of specified alpha values for
the sampled pixels and 0 for all others To describe shadowin a soft manner we suppose that shadow pixels are of theforeground and the nonshadow ones are of the backgroundThen the shadow probability can be denoted by alpha [14]
So the shadow probability using alpha is denoted by
119875 (119884120572
119894119895| 119883120572
119894119895= 1) = 120572
119894119895
119875 (119884120572
119894119895| 119883120572
119894119895= 2) = 1 minus 120572
119894119895
(7)
Finally taking into account both intensity and opacity theshadow probability can be described as
119875 (119884119894119895| 119883119894119895= 119896) =
119875(1198841015840
119894119895| 119883119894119895= 119896) 120575
119894119895le 120579
119875 (119884120572
119894119895| 119883120572
119894119895= 119896) 120575
119894119895gt 120579
(8)
4 Mathematical Problems in Engineering
Procedure detectShadow(119884)119886119897119901ℎ119886 larr solveAlpha(119884)lowastBy (6)lowastlowast119886119897119901ℎ119886 is an array records the parameter alpha for each pixel sitelowast119875(119884120572
119894119895| 119883120572
119894119895) larr 119886119897119901ℎ119886 lowastBy (7)lowast
1198841015840larrcolorTransform(119884)
119875(1198841015840
119894119895| 119883119894119895) larr 119884
1015840lowastBy (1)lowast119875(119884119894119895| 119883119894119895) larr 119875(119884
120572
119894119895| 119883120572
119894119895) 119875(1198841015840
119894119895| 119883119894119895)
lowastBy (8)lowastinitSeglarr histogramOpacity(119875(119884120572
119894119895| 119883120572
119894119895))
lowastObtain the initial segment according to the histogram of probability computed through the opacity lowastwhile (iter lemaxIter)lowastApply the feature condition probability iteratively until the algorithm reaches the maximum iteration number lowast119875(119883119894= 119896 | 119883
119873119894119895) larr priorPercent (seg 120573)
lowastBy Potts modellowastlowastIn the first iteration seg = initSeglowastseglarrMAPcriteria(119875(119884
119894119895| 119883119894119895) 119875(119883
119894= 119896 | 119883
119873119894119895))
lowastSegment the image into shadows and nonshadows using the MAP criterialowastEndwhile119877119890119904119906119897119905 = seg
Return 119877119890119904119906119897119905
Algorithm 1
where 119896 isin 1 2 and 120575119894119895= |120572119894119895minus(1minus120572
119894119895)| and the parameter 120579
whose value is decided by the histogram of 120575 is a parameterto adjust the effect of intensity and opacity when determiningthe shadow probability
3 MRF Shadow Detection Method
Aiming at partitioning an image into shadows area andnonshadows area the procedure of shadow detection canbe treated as a process of image labeling The thresholdingmethods label each pixel individually based on its intensityIt has some obvious defects The first one is its ignorance ofthe interaction information between neighbors which seri-ously impacts the detection accuracy Besides imprecisionis associated with remote sensing images inherently since apixel always represents an area of the land space which alsomakes the thresholding methods fail to retain enough infor-mation from the original images compared to soft methodsTherefore in this study aiming at obtaining more accuratedetection results we design a soft shadow detection methodby resorting to MRF to incorporate spatial information
Let 119884 denote an intensity image defined on a 119898 times 119899
rectangular lattice set and let 119883 = 11990911 11990912 119909
119898119899 denote
the label field where 119909119894119895isin 1 2 with 1 and 2 indicating
shadow area and nonshadow area respectively In theBayesian image segmentation framework the segmentedimage119883 is obtained by
119909119894119895= argmax
119909119894119895
119875 (119910119894119895| 119883119894119895= 119896) 119875 (119883
119894= 119896 | 119883
119873119894119895) (9)
where 119875(119910119894119895| 119883119894119895= 119896) is the class conditional probability
which represents the characteristics of extracted featuresof pixels In our proposed method the shadow probabilitydescribed in Section 2 is employed as the class conditional
probability 119875(119883119894= 119896 | 119883
119873119894119895) is the prior probability which
defines the interaction between each pixel and its neighborswhere119873
119894119895is the set of neighborhood pixels of pixel (119894 119895) Potts
model is a simple and efficient one to represent the interac-tions of neighboring pixels clearly Although some improvedcomplex Potts models have been proposed the classicalmodel is sufficient enough to this study Therefore for sim-plicity without loss of generality we employ the classical Pottsmodel to describe the label field119883 in our proposed method
Given a remote sensing image 119884 in the visible spectrumthe training samples can be obtained by scribbling differentlines on shadow area and nonshadow area respectively Afterthat the opacity can be estimated by (6) Then the inputimage is transformed into the HSI color space to get thecorresponding transformed intensity image Based on thisthe shadow probabilities are computed and applied in ouriterative shadow extraction procedure
The details of our proposedMRF-based shadowdetectionalgorithm are described as in Algorithm 1
4 Experiments and Discussion
In this section we show the experimental results for verifyingthe performance of the proposed method We implementedall these algorithms in MatLab 2009a The present experi-ments were performed on a personal computer with an IntelPentium Dual-Core 22GHz CPU and 8G random accessMemory under the Microsoft Windows 7 environment
41 Data Sets To evaluate the performance of proposedshadow detection method four pieces of QuickBird urbanimages were chosen The first image shown in Figure 3(a)which is acquired in September 2003 refers to a 280 times 280pixel image in the visible spectrum It mainly consists of grass
Mathematical Problems in Engineering 5
(a) (b)
(c) (d)
Figure 3 Results of different neighborhood size (a) The first QB image (b) result of 3 times 3 (c) result of 5 times 5 and (d) result of 7 times 7
areas buildings and their shadows The next two imagesshow different scenes of Beijing acquired in May 2011 andApril 2011 respectively and their sizes are 300 times 300 and280 times 280 (see Figures 5(a) and 6(a)) They mainly containroads trees grass buildings blue roofs and shadows of treesand buildings The fourth image represents a crop of 256 times256 pixels of the Wuhan University acquired in 2004 (seeFigure 7(a)) There are six land covers roads bared landtrees buildings water and shadows
The main variation among the selected scenes is thecomplexity of scenes contents For example types of landcovers in the first image (Figure 3(a)) are less than the othersMeanwhile in the first image shadows mainly obscured bybuildings are relatively larger whereas in ldquoWuhanUniversityrdquoimage (Figure 7(a)) there are many fragmental tree shadowsin addition to building shadows This different complexitycan affect the performance of our proposed shadow detectionmethod which will be discussed later
42 Parameter Setting Some parameters in our experimentswere chosen empirically In detail 120577 = 20 for intensity trans-form function and 120573 = 03 for Potts model Howeverthe parameter 120579 used in the shadow probability functionshould be set in accordance with specific images because itsvalue is determined by the histogram of 120575 as mentioned inSection 22 In our experiments 098 091 088 and 095 areset as the values of 120579 for Figures 3(a) 5(a) 6(a) and 7(a)respectively
Another important parameter in the proposed MRF-based method is the size of neighborhood Three shadowdetection experiments using different neighborhood sizesnamely 3 times 3 5 times 5 and 7 times 7 were performed on the firstimage And the results shown in Figure 3 represent that thebest choice should be 3 times 3 because it can preserve as muchas possible the image details So such a neighborhood sizehas been adopted in all the following experiments
43 Experiment Setup Before running our detectionmethod a sample image should be prepared by scribblingnonshadows in black and shadows in white In order toget enough samples white scribbles should be placedon all different kinds of land surfaces in shadow areasSimultaneously black scribbles for the nonshadow samplesshould mark all the regions that should not be mixed withshadows
In order to obtain the shadow probability two proceduresare performed one for computing the probability by theopacity image and the other for the transformed intensityimage Figure 4(b) shows the detection result on the first QBimage of shadow probability model using opacity only whileFigure 4(c) displays the result using transformed intensityonly As seen from Figure 4(b) the detection has lost somelittle shadow areas and misclassified some nonshadow pixelsas shadows ones The main reason lies in the insufficiencyof samples in corresponding areas Obviously it is notsufficient to reply on opacity only Simultaneously Figure 4(c)
6 Mathematical Problems in Engineering
(a) (b)
(c) (d)
Figure 4 Results using different probability models (a) the ground truth of the first QB image (b) opacity only (c) intensity only and (d)the proposed soft shadow model
shows that detection using intensity only gets many speckledshadows caused by dark pixels on trees or buildings
Then the final shadow probability is obtained by combin-ing the opacity with transformed intensity As expected theresult using the final probability has obviously less misclas-sifications which is shown in Figure 4(d) In summary thesuperiority of our novel soft shadow model is clearly demon-strated by the comparison of the results shown in Figure 4
44 Results and Discussions
441 Comparative Method In order to verify the superiorityof the proposed shadow detection method to the threshold-ing ones three methods are employed as the competitorsbithreshold method [8] PCAHSI [9] and HI method [7]
(i) Bithreshold method [8] firstly transform the imageinto HIS color space compute the normalized differ-ence of intensity (119868) and saturation (119878) componentsand obtain the initial detection by its thresholdThenget the detection result of 119868 channel by histogramthreshold The final result is obtained by performingAND operation on two detected results mentionedabove
(ii) PCAHSI [9] firstly compute the shadow index (SI)based on principal component transformation and
HIS model Then image is divided into the shadowarea and nonshadow area by SI histogram threshold
(iii) HI method [7] firstly compute the ratio of HI inHSI color space and get initial result by HI thresh-old Then obtain a shape mask by applying a Sobeloperator on the 119868 component Finally by overlappingthe shape mask with the existing shadow mask ofshadowed regions from the logical AND operator ashape-preserved shadow mask is derived
442 Visual Comparison Figures 5 and 6 present the resultson ldquoBeijing scenerdquo images of our proposed method and thecompetitive ones In these experiments the correspondingground truth images (Figures 5(c) and 6(c)) are obtainedby careful photo interpretation Subfigures (d)ndash(g) in bothFigures 5 and 6 show the detection results of bithresholdmethod PCAHSI HI method and the proposed methodrespectively As seen fromFigure 5 the thresholdingmethodsmake seriousmisclassification because the intensity of trees isvery similar to that of shadows Only by using the histogramthresholds the thresholdingmethods are not efficient enoughto distinguish between trees and shadows accurately whilethe proposed method describes each pixel with shadowprobability and decides whether a pixel is a shadow one ornot by considering the neighbor information Therefore theproposed method appears to be the most satisfactory one
Mathematical Problems in Engineering 7
(a) (b) (c)
(d) (e) (f)
(g)
Figure 5 Results on ldquoBeijing scene 1rdquo (a) The QB image (b) sample image (c) the ground truth (d) bithreshold (e) PCAHSI (f) HI and(g) proposed method
The comparison between Figures 6(d)ndash6(f) and 6(g)shows that our proposed method is obviously superior tothe referenced ones The competitive results show manymisclassified speckle noises In these noises some are causedby small dark objects in nonshadow areas and others arecaused by the fragmented shadow of trees As the purposeof the present work is to separate the shadows from theirproducer those are consider as noises However this prob-lem is solved in Figure 6(g) where small misclassificationislands are eliminated by the spatial information betweenneighboring pixels Moreover in Figures 6(d)ndash6(f) somehigh intensity objects in shadow areas are misclassified as
nonshadows which shows that the hard shadow modelscannot accurately represent the nonuniform distributionsof spectral features in shadow areas On the contrary themisclassifications in Figure 6(g) are greatly reduced whichmainly benefits from the accurate nonuniform descriptioncapability of the proposed shadow probability model and thepowerful spatial modeling ability of the MRF used in ourmethod
443 Quantitative Comparisons To obtain a quantitativecomparison between different algorithms both recall andprecision are employed as indicators Recall represents how
8 Mathematical Problems in Engineering
(a) (b) (c)
(d) (e) (f)
(g)
Figure 6 Results on ldquoBeijing scene 2rdquo (a) The QB image (b) sample image (c) the ground truth (d) bithreshold (e) PCAHSI (f) HI and(g) proposed method
many true shadowpixels have been detected as shadowpixelswhich is denoted by
DR =119873119888
119873119905
times 100 (10)
where 119873119905is the number of true shadow pixels which is
counted from a true shadow mask obtained by careful photointerpretation manually and 119873
119888is the number of pixels
correctly detected which is computed by performing ANDoperation on the detected result and the true shadow mask
Precision indicates how many shadow pixels have beendetected correctly which is denoted by
DP =119873119888
119873119889
times 100 (11)
where119873119889is the number of pixels labeled as shadow
From the definition it is easy to conclude that the recallfavors overdetection and the precision favors underdetectionThat is to say high recall combined with a low precisionmeans overdetection shadows
Mathematical Problems in Engineering 9
(a) (b) (c)
(d) (e) (f)
(g)
Figure 7 Results on ldquoWuhan Universityrdquo image (a) The QB image (b) sample image (c) the ground truth (d) bithreshold (e) PCAHSI (f)HI and (g) proposed method
We applied all competitive algorithms and proposedmethod on a ldquoWuhan Universityrdquo QB image shown inFigure 7 Correspondingly we measured the recall and pre-cision of each method and listed their values in Table 1
As seen from Table 1 recall of bithreshold and PCAHSImethods is 1 whereas their precision is only 04601 and05645 respectively which shows that bothmethods obtainedoverdetection results The similar results can also be foundin Figures 7(d) and 7(e) Although the HI method achievedmore accurate result (shown in Figure 7(f)) compared tobithreshold and PCAHSI it still produces serious misdetec-tion islands in the final map From the quantitative resultsas shown in Table 1 it is easy to conclude that the proposed
Table 1 Recall and precision of ldquoWuhan Universityrdquo image
Method Bithreshold PCAHSI HI ProposedDR 1 1 07320 09882DP 04601 05645 06741 07890
method can obtain more accurate shadow detection resultsthan the competitors for its shadow probability models
45 Limits By carefully observing the detection results of theproposedmethod on different images (Figures 5(g) 6(g) and7(g)) we can found that the more complex the surface is
10 Mathematical Problems in Engineering
(a) (b)
(c) (d)
Figure 8 Results on images with different surface (a) The first QB image (b) ldquoWuhan Universityrdquo image (c) result on (a) and (d) result on(b)
Table 2 Recall and precision of images with different surface
Image First QB image Wuhan UniversityDR 1 09882DP 08961 07890
the more dissatisfactory the result will be In order to givea quantitative evaluation we compared the results on thefirst QB image and ldquoWuhan Universityrdquo image (see Figure 8)Their values of recall and precision are listed in Table 2
As mentioned in Section 41 the first QB image containsonly three types of land covers while ldquoWuhan Universityrdquoimage consists of six different types Accordingly the recalland precision for the first QB image are 1 and 08961 respec-tively These values for ldquoWuhan Universityrdquo image descendto 09882 and 078901 respectively The main reason is thatit is hard to provide sufficient samples in a complex imageWhenwe scribbled samples pixels belonging to different landcovers may be selected as the training samples Even worsepixels of the same land covers but with different intensity forexample the light buildings and dark buildings may also beselected A possible way to eliminate this limit is to jointly usethe shape of sample land covers And this may be our futurework
5 Conclusions
In this paper we focus on the design of a soft shadowdescription method where both intensity and opacity areemployed to estimate a soft degree for each pixel to measurethe extent of belonging to shadows Based on the softshadow description MRF-based iterative detection methodis proposed to make full use of the interactions betweenneighboring pixels The proposed method is tested on fourpieces ofQuickBird remote sensing imagesThe experimentalresults have demonstrated that the proposed method canobtain more accurate results compared to three competitors
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is supported in part by the National NaturalScience Foundation of China under Grants 41001251 theKey Technology Projects of Henan province of China (no132102210212) the Key Technology Projects of the Edu-cational Department of Henan Province of China (no
Mathematical Problems in Engineering 11
13A520011) and the Excellent Youth Teacher of Henan Edu-cational Department of China (2011)
References
[1] C Jaynes S Webb R M Steele M Brown and W B SealesldquoDynamic shadow removal from front projection displaysrdquo inProceedings of the IEEEConference onVisualization pp 175ndash182October 2001
[2] A M Polidorio F C Flores N N Imai et al ldquoAutomaticshadow segmentation in aerial color imagesrdquo in Proceedings ofthe 16th Brazilian Symposium on Computer Graphics and ImageProcessing (SIBGRAPI rsquo03) pp 270ndash277 October 2003
[3] J Huang W Xie and L Tang ldquoDetection of and compensationfor shadows in colored urban aerial imagesrdquo in Proceedings ofthe 5th World Congress on Intelligent Control and Automation(WCICA rsquo04) vol 4 pp 3098ndash3100 June 2004
[4] MHaijianQQiming and S Xinyi ldquoShadow segmentation andcompensation in high resolution satellite imagesrdquo in Proceed-ings of the IEEE International Geoscience and Remote SensingSymposium pp II1036ndashII1039 Boston Mass USA usa July2008
[5] V Arevalo J Gonzalez and G Ambrosio ldquoShadow detection incolour high-resolution satellite imagesrdquo International Journal ofRemote Sensing vol 29 no 7 pp 1945ndash1963 2008
[6] T Gevers and A W M Smeulders ldquoColor-based object recog-nitionrdquo Pattern Recognition vol 32 no 3 pp 453ndash464 1999
[7] V J D Tsai ldquoA comparative study on shadow compensation ofcolor aerial images in invariant color modelsrdquo IEEE Transac-tions on Geoscience and Remote Sensing vol 44 no 6 pp 1661ndash1671 2006
[8] J Yang Z Zhao and J Yang ldquoA shadow removal methodfor high resolution remote sensing imagerdquo Geomatics andInformation Science of Wuhan University vol 33 no 1 pp 17ndash20 2008
[9] H Liu andTXie ldquoStudy on shadowdetection in high resolutionremote sensing image of PCA and HIS modelrdquo Remote SensingTechnology and Application vol 28 no 1 pp 78ndash84 2013
[10] T-P Wu C-K Tang M S Brown and H-Y Shum ldquoNaturalshadow mattingrdquo ACM Transactions on Graphics vol 26 no 2pp 377ndash388 2007
[11] W Liu and F Yamazaki ldquoObject-based shadow extraction andcorrection of high-resolution optical satellite imagesrdquo IEEEJournal of Selected Topics in Applied Earth Observations andRemote Sensing vol 5 no 4 pp 1296ndash1302 2012
[12] J Besag ldquoStatistical analysis of nonlattice datardquoThe Statisticianvol 24 no 3 pp 179ndash195 1975
[13] J Liu T Fang and D Li ldquoShadow detection in remotelysensed images based on self-adaptive feature selectionrdquo IEEETransactions on Geoscience and Remote Sensing vol 49 no 12pp 5092ndash5103 2011
[14] A Levin D Lischinski and YWeiss ldquoA closed-form solution tonatural image mattingrdquo IEEE Transactions on Pattern Analysisand Machine Intelligence vol 30 no 2 pp 228ndash242 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
(a) (b)
Figure 2 Intensity contrast (a) original intensity image and (b) transformed intensity image
denote the set of pixel sites Let the training shadow samplesbe denoted by 119905 = 119905
1 1199052 119905
119899 where 119905
119894is the site set of the
119894th sample Then the transformation can be described as
1198841015840= (
1
120587arctan 120577119889 + 05) lowast radic119884 (1)
where 119889 is the intensity distance between each pixel and themean of the shadow samples denoted by
119889 = 119910119894119895minus
sum119905119894isin119905119910119905119894
119899 (2)
where 119894119895 denotes the pixel site (119894 119895) and 119899 stands for the totalpixel number in the sample area
The inverse tangent function in (1) can enlarge the differ-ence between shadows and nonshadowsThe parameter 120577 is asensitivity factor adjusting the change speed whose empiricalvalue is 20 An example of this function is shown in Figure 2It can be seen that the intensity contrast in Figure 2(b)is more obvious than that in Figure 2(a)
Aiming at achieving a shadow probability for each pixelthe distance between the transformed intensity and meanintensity of the sample shadow areas is used to measurethe degree of each pixel belonging to the shadow Let 119883 =
11990911 11990912 119909
119898119899 (119909119894119895isin 1 2) denote the label field where
119909119894119895= 1 indicates that the pixel on site (119894 119895) is a shadow pixel
Then the shadow probability can be defined as
119875 (1198841015840
119894119895| 119883119894119895= 1) =
1198841015840
119894119895minus 120583119905
max119894119895isin119904(1198841015840
119894119895minus 120583119905)
(3)
where 120583119905is the mean value of sample areas in transformed
intensity image 1198841015840 Then the nonshadow probability isdescribed as
119875 (1198841015840
119894119895| 119883119894119895= 2) = 1 minus 119875 (119884
1015840
119894119895| 119883119894119895= 1) (4)
This probability is applicable when pixel intensities areobviously different However in most cases it is not accurateenough for shadow detection To improve the accuracy ofdetection result we introduce the concept of opacity of imagematting into shadow detection which will be introduced inthe next section
22 Introducing the Concept of Opacity Image matting is theprocess of extracting a foreground object from an image byestimating the foreground opacity [14] For shadowdetectionit aims at extracting shadows from an image therefore itis reasonable to regard shadows as foreground objects andintroduce the methods used in image mating to the field ofshadow detection
In image matting the color of the pixel on site (119894 119895)in channel 119888 is assumed to be a linear combination of thecorresponding foreground and background colors
119884119888
119894119895= 120572119894119895119865119888
119894119895+ (1 minus 120572
119894119895) 119861119888
119894119895 (5)
where 120572119894119895is the pixelrsquos foreground opacity and 119865119888
119894119895and 119861119888
119894119895
denote the foreground and the background It is a massivetask to estimate the foreground and the background colorsas well as the opacity A closed-form solution [13] is presentedto extract the alpha matte directly without requiring reliableestimates for 119865 and 119861 In this method alpha is computed as
120572 = arg min 120572119879119871120572 + 120582 (120572119879 minus 119887119879119904)119863119904(120572 minus 119887
119904) (6)
where 120582 is a large constant 119871 is a square matrix defined asmating Laplacian [14]119863
119904is a diagonalmatrix whose diagonal
elements are 1 for samplematrix and 0 for all other pixels and119887119904is the vector which consists of specified alpha values for
the sampled pixels and 0 for all others To describe shadowin a soft manner we suppose that shadow pixels are of theforeground and the nonshadow ones are of the backgroundThen the shadow probability can be denoted by alpha [14]
So the shadow probability using alpha is denoted by
119875 (119884120572
119894119895| 119883120572
119894119895= 1) = 120572
119894119895
119875 (119884120572
119894119895| 119883120572
119894119895= 2) = 1 minus 120572
119894119895
(7)
Finally taking into account both intensity and opacity theshadow probability can be described as
119875 (119884119894119895| 119883119894119895= 119896) =
119875(1198841015840
119894119895| 119883119894119895= 119896) 120575
119894119895le 120579
119875 (119884120572
119894119895| 119883120572
119894119895= 119896) 120575
119894119895gt 120579
(8)
4 Mathematical Problems in Engineering
Procedure detectShadow(119884)119886119897119901ℎ119886 larr solveAlpha(119884)lowastBy (6)lowastlowast119886119897119901ℎ119886 is an array records the parameter alpha for each pixel sitelowast119875(119884120572
119894119895| 119883120572
119894119895) larr 119886119897119901ℎ119886 lowastBy (7)lowast
1198841015840larrcolorTransform(119884)
119875(1198841015840
119894119895| 119883119894119895) larr 119884
1015840lowastBy (1)lowast119875(119884119894119895| 119883119894119895) larr 119875(119884
120572
119894119895| 119883120572
119894119895) 119875(1198841015840
119894119895| 119883119894119895)
lowastBy (8)lowastinitSeglarr histogramOpacity(119875(119884120572
119894119895| 119883120572
119894119895))
lowastObtain the initial segment according to the histogram of probability computed through the opacity lowastwhile (iter lemaxIter)lowastApply the feature condition probability iteratively until the algorithm reaches the maximum iteration number lowast119875(119883119894= 119896 | 119883
119873119894119895) larr priorPercent (seg 120573)
lowastBy Potts modellowastlowastIn the first iteration seg = initSeglowastseglarrMAPcriteria(119875(119884
119894119895| 119883119894119895) 119875(119883
119894= 119896 | 119883
119873119894119895))
lowastSegment the image into shadows and nonshadows using the MAP criterialowastEndwhile119877119890119904119906119897119905 = seg
Return 119877119890119904119906119897119905
Algorithm 1
where 119896 isin 1 2 and 120575119894119895= |120572119894119895minus(1minus120572
119894119895)| and the parameter 120579
whose value is decided by the histogram of 120575 is a parameterto adjust the effect of intensity and opacity when determiningthe shadow probability
3 MRF Shadow Detection Method
Aiming at partitioning an image into shadows area andnonshadows area the procedure of shadow detection canbe treated as a process of image labeling The thresholdingmethods label each pixel individually based on its intensityIt has some obvious defects The first one is its ignorance ofthe interaction information between neighbors which seri-ously impacts the detection accuracy Besides imprecisionis associated with remote sensing images inherently since apixel always represents an area of the land space which alsomakes the thresholding methods fail to retain enough infor-mation from the original images compared to soft methodsTherefore in this study aiming at obtaining more accuratedetection results we design a soft shadow detection methodby resorting to MRF to incorporate spatial information
Let 119884 denote an intensity image defined on a 119898 times 119899
rectangular lattice set and let 119883 = 11990911 11990912 119909
119898119899 denote
the label field where 119909119894119895isin 1 2 with 1 and 2 indicating
shadow area and nonshadow area respectively In theBayesian image segmentation framework the segmentedimage119883 is obtained by
119909119894119895= argmax
119909119894119895
119875 (119910119894119895| 119883119894119895= 119896) 119875 (119883
119894= 119896 | 119883
119873119894119895) (9)
where 119875(119910119894119895| 119883119894119895= 119896) is the class conditional probability
which represents the characteristics of extracted featuresof pixels In our proposed method the shadow probabilitydescribed in Section 2 is employed as the class conditional
probability 119875(119883119894= 119896 | 119883
119873119894119895) is the prior probability which
defines the interaction between each pixel and its neighborswhere119873
119894119895is the set of neighborhood pixels of pixel (119894 119895) Potts
model is a simple and efficient one to represent the interac-tions of neighboring pixels clearly Although some improvedcomplex Potts models have been proposed the classicalmodel is sufficient enough to this study Therefore for sim-plicity without loss of generality we employ the classical Pottsmodel to describe the label field119883 in our proposed method
Given a remote sensing image 119884 in the visible spectrumthe training samples can be obtained by scribbling differentlines on shadow area and nonshadow area respectively Afterthat the opacity can be estimated by (6) Then the inputimage is transformed into the HSI color space to get thecorresponding transformed intensity image Based on thisthe shadow probabilities are computed and applied in ouriterative shadow extraction procedure
The details of our proposedMRF-based shadowdetectionalgorithm are described as in Algorithm 1
4 Experiments and Discussion
In this section we show the experimental results for verifyingthe performance of the proposed method We implementedall these algorithms in MatLab 2009a The present experi-ments were performed on a personal computer with an IntelPentium Dual-Core 22GHz CPU and 8G random accessMemory under the Microsoft Windows 7 environment
41 Data Sets To evaluate the performance of proposedshadow detection method four pieces of QuickBird urbanimages were chosen The first image shown in Figure 3(a)which is acquired in September 2003 refers to a 280 times 280pixel image in the visible spectrum It mainly consists of grass
Mathematical Problems in Engineering 5
(a) (b)
(c) (d)
Figure 3 Results of different neighborhood size (a) The first QB image (b) result of 3 times 3 (c) result of 5 times 5 and (d) result of 7 times 7
areas buildings and their shadows The next two imagesshow different scenes of Beijing acquired in May 2011 andApril 2011 respectively and their sizes are 300 times 300 and280 times 280 (see Figures 5(a) and 6(a)) They mainly containroads trees grass buildings blue roofs and shadows of treesand buildings The fourth image represents a crop of 256 times256 pixels of the Wuhan University acquired in 2004 (seeFigure 7(a)) There are six land covers roads bared landtrees buildings water and shadows
The main variation among the selected scenes is thecomplexity of scenes contents For example types of landcovers in the first image (Figure 3(a)) are less than the othersMeanwhile in the first image shadows mainly obscured bybuildings are relatively larger whereas in ldquoWuhanUniversityrdquoimage (Figure 7(a)) there are many fragmental tree shadowsin addition to building shadows This different complexitycan affect the performance of our proposed shadow detectionmethod which will be discussed later
42 Parameter Setting Some parameters in our experimentswere chosen empirically In detail 120577 = 20 for intensity trans-form function and 120573 = 03 for Potts model Howeverthe parameter 120579 used in the shadow probability functionshould be set in accordance with specific images because itsvalue is determined by the histogram of 120575 as mentioned inSection 22 In our experiments 098 091 088 and 095 areset as the values of 120579 for Figures 3(a) 5(a) 6(a) and 7(a)respectively
Another important parameter in the proposed MRF-based method is the size of neighborhood Three shadowdetection experiments using different neighborhood sizesnamely 3 times 3 5 times 5 and 7 times 7 were performed on the firstimage And the results shown in Figure 3 represent that thebest choice should be 3 times 3 because it can preserve as muchas possible the image details So such a neighborhood sizehas been adopted in all the following experiments
43 Experiment Setup Before running our detectionmethod a sample image should be prepared by scribblingnonshadows in black and shadows in white In order toget enough samples white scribbles should be placedon all different kinds of land surfaces in shadow areasSimultaneously black scribbles for the nonshadow samplesshould mark all the regions that should not be mixed withshadows
In order to obtain the shadow probability two proceduresare performed one for computing the probability by theopacity image and the other for the transformed intensityimage Figure 4(b) shows the detection result on the first QBimage of shadow probability model using opacity only whileFigure 4(c) displays the result using transformed intensityonly As seen from Figure 4(b) the detection has lost somelittle shadow areas and misclassified some nonshadow pixelsas shadows ones The main reason lies in the insufficiencyof samples in corresponding areas Obviously it is notsufficient to reply on opacity only Simultaneously Figure 4(c)
6 Mathematical Problems in Engineering
(a) (b)
(c) (d)
Figure 4 Results using different probability models (a) the ground truth of the first QB image (b) opacity only (c) intensity only and (d)the proposed soft shadow model
shows that detection using intensity only gets many speckledshadows caused by dark pixels on trees or buildings
Then the final shadow probability is obtained by combin-ing the opacity with transformed intensity As expected theresult using the final probability has obviously less misclas-sifications which is shown in Figure 4(d) In summary thesuperiority of our novel soft shadow model is clearly demon-strated by the comparison of the results shown in Figure 4
44 Results and Discussions
441 Comparative Method In order to verify the superiorityof the proposed shadow detection method to the threshold-ing ones three methods are employed as the competitorsbithreshold method [8] PCAHSI [9] and HI method [7]
(i) Bithreshold method [8] firstly transform the imageinto HIS color space compute the normalized differ-ence of intensity (119868) and saturation (119878) componentsand obtain the initial detection by its thresholdThenget the detection result of 119868 channel by histogramthreshold The final result is obtained by performingAND operation on two detected results mentionedabove
(ii) PCAHSI [9] firstly compute the shadow index (SI)based on principal component transformation and
HIS model Then image is divided into the shadowarea and nonshadow area by SI histogram threshold
(iii) HI method [7] firstly compute the ratio of HI inHSI color space and get initial result by HI thresh-old Then obtain a shape mask by applying a Sobeloperator on the 119868 component Finally by overlappingthe shape mask with the existing shadow mask ofshadowed regions from the logical AND operator ashape-preserved shadow mask is derived
442 Visual Comparison Figures 5 and 6 present the resultson ldquoBeijing scenerdquo images of our proposed method and thecompetitive ones In these experiments the correspondingground truth images (Figures 5(c) and 6(c)) are obtainedby careful photo interpretation Subfigures (d)ndash(g) in bothFigures 5 and 6 show the detection results of bithresholdmethod PCAHSI HI method and the proposed methodrespectively As seen fromFigure 5 the thresholdingmethodsmake seriousmisclassification because the intensity of trees isvery similar to that of shadows Only by using the histogramthresholds the thresholdingmethods are not efficient enoughto distinguish between trees and shadows accurately whilethe proposed method describes each pixel with shadowprobability and decides whether a pixel is a shadow one ornot by considering the neighbor information Therefore theproposed method appears to be the most satisfactory one
Mathematical Problems in Engineering 7
(a) (b) (c)
(d) (e) (f)
(g)
Figure 5 Results on ldquoBeijing scene 1rdquo (a) The QB image (b) sample image (c) the ground truth (d) bithreshold (e) PCAHSI (f) HI and(g) proposed method
The comparison between Figures 6(d)ndash6(f) and 6(g)shows that our proposed method is obviously superior tothe referenced ones The competitive results show manymisclassified speckle noises In these noises some are causedby small dark objects in nonshadow areas and others arecaused by the fragmented shadow of trees As the purposeof the present work is to separate the shadows from theirproducer those are consider as noises However this prob-lem is solved in Figure 6(g) where small misclassificationislands are eliminated by the spatial information betweenneighboring pixels Moreover in Figures 6(d)ndash6(f) somehigh intensity objects in shadow areas are misclassified as
nonshadows which shows that the hard shadow modelscannot accurately represent the nonuniform distributionsof spectral features in shadow areas On the contrary themisclassifications in Figure 6(g) are greatly reduced whichmainly benefits from the accurate nonuniform descriptioncapability of the proposed shadow probability model and thepowerful spatial modeling ability of the MRF used in ourmethod
443 Quantitative Comparisons To obtain a quantitativecomparison between different algorithms both recall andprecision are employed as indicators Recall represents how
8 Mathematical Problems in Engineering
(a) (b) (c)
(d) (e) (f)
(g)
Figure 6 Results on ldquoBeijing scene 2rdquo (a) The QB image (b) sample image (c) the ground truth (d) bithreshold (e) PCAHSI (f) HI and(g) proposed method
many true shadowpixels have been detected as shadowpixelswhich is denoted by
DR =119873119888
119873119905
times 100 (10)
where 119873119905is the number of true shadow pixels which is
counted from a true shadow mask obtained by careful photointerpretation manually and 119873
119888is the number of pixels
correctly detected which is computed by performing ANDoperation on the detected result and the true shadow mask
Precision indicates how many shadow pixels have beendetected correctly which is denoted by
DP =119873119888
119873119889
times 100 (11)
where119873119889is the number of pixels labeled as shadow
From the definition it is easy to conclude that the recallfavors overdetection and the precision favors underdetectionThat is to say high recall combined with a low precisionmeans overdetection shadows
Mathematical Problems in Engineering 9
(a) (b) (c)
(d) (e) (f)
(g)
Figure 7 Results on ldquoWuhan Universityrdquo image (a) The QB image (b) sample image (c) the ground truth (d) bithreshold (e) PCAHSI (f)HI and (g) proposed method
We applied all competitive algorithms and proposedmethod on a ldquoWuhan Universityrdquo QB image shown inFigure 7 Correspondingly we measured the recall and pre-cision of each method and listed their values in Table 1
As seen from Table 1 recall of bithreshold and PCAHSImethods is 1 whereas their precision is only 04601 and05645 respectively which shows that bothmethods obtainedoverdetection results The similar results can also be foundin Figures 7(d) and 7(e) Although the HI method achievedmore accurate result (shown in Figure 7(f)) compared tobithreshold and PCAHSI it still produces serious misdetec-tion islands in the final map From the quantitative resultsas shown in Table 1 it is easy to conclude that the proposed
Table 1 Recall and precision of ldquoWuhan Universityrdquo image
Method Bithreshold PCAHSI HI ProposedDR 1 1 07320 09882DP 04601 05645 06741 07890
method can obtain more accurate shadow detection resultsthan the competitors for its shadow probability models
45 Limits By carefully observing the detection results of theproposedmethod on different images (Figures 5(g) 6(g) and7(g)) we can found that the more complex the surface is
10 Mathematical Problems in Engineering
(a) (b)
(c) (d)
Figure 8 Results on images with different surface (a) The first QB image (b) ldquoWuhan Universityrdquo image (c) result on (a) and (d) result on(b)
Table 2 Recall and precision of images with different surface
Image First QB image Wuhan UniversityDR 1 09882DP 08961 07890
the more dissatisfactory the result will be In order to givea quantitative evaluation we compared the results on thefirst QB image and ldquoWuhan Universityrdquo image (see Figure 8)Their values of recall and precision are listed in Table 2
As mentioned in Section 41 the first QB image containsonly three types of land covers while ldquoWuhan Universityrdquoimage consists of six different types Accordingly the recalland precision for the first QB image are 1 and 08961 respec-tively These values for ldquoWuhan Universityrdquo image descendto 09882 and 078901 respectively The main reason is thatit is hard to provide sufficient samples in a complex imageWhenwe scribbled samples pixels belonging to different landcovers may be selected as the training samples Even worsepixels of the same land covers but with different intensity forexample the light buildings and dark buildings may also beselected A possible way to eliminate this limit is to jointly usethe shape of sample land covers And this may be our futurework
5 Conclusions
In this paper we focus on the design of a soft shadowdescription method where both intensity and opacity areemployed to estimate a soft degree for each pixel to measurethe extent of belonging to shadows Based on the softshadow description MRF-based iterative detection methodis proposed to make full use of the interactions betweenneighboring pixels The proposed method is tested on fourpieces ofQuickBird remote sensing imagesThe experimentalresults have demonstrated that the proposed method canobtain more accurate results compared to three competitors
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is supported in part by the National NaturalScience Foundation of China under Grants 41001251 theKey Technology Projects of Henan province of China (no132102210212) the Key Technology Projects of the Edu-cational Department of Henan Province of China (no
Mathematical Problems in Engineering 11
13A520011) and the Excellent Youth Teacher of Henan Edu-cational Department of China (2011)
References
[1] C Jaynes S Webb R M Steele M Brown and W B SealesldquoDynamic shadow removal from front projection displaysrdquo inProceedings of the IEEEConference onVisualization pp 175ndash182October 2001
[2] A M Polidorio F C Flores N N Imai et al ldquoAutomaticshadow segmentation in aerial color imagesrdquo in Proceedings ofthe 16th Brazilian Symposium on Computer Graphics and ImageProcessing (SIBGRAPI rsquo03) pp 270ndash277 October 2003
[3] J Huang W Xie and L Tang ldquoDetection of and compensationfor shadows in colored urban aerial imagesrdquo in Proceedings ofthe 5th World Congress on Intelligent Control and Automation(WCICA rsquo04) vol 4 pp 3098ndash3100 June 2004
[4] MHaijianQQiming and S Xinyi ldquoShadow segmentation andcompensation in high resolution satellite imagesrdquo in Proceed-ings of the IEEE International Geoscience and Remote SensingSymposium pp II1036ndashII1039 Boston Mass USA usa July2008
[5] V Arevalo J Gonzalez and G Ambrosio ldquoShadow detection incolour high-resolution satellite imagesrdquo International Journal ofRemote Sensing vol 29 no 7 pp 1945ndash1963 2008
[6] T Gevers and A W M Smeulders ldquoColor-based object recog-nitionrdquo Pattern Recognition vol 32 no 3 pp 453ndash464 1999
[7] V J D Tsai ldquoA comparative study on shadow compensation ofcolor aerial images in invariant color modelsrdquo IEEE Transac-tions on Geoscience and Remote Sensing vol 44 no 6 pp 1661ndash1671 2006
[8] J Yang Z Zhao and J Yang ldquoA shadow removal methodfor high resolution remote sensing imagerdquo Geomatics andInformation Science of Wuhan University vol 33 no 1 pp 17ndash20 2008
[9] H Liu andTXie ldquoStudy on shadowdetection in high resolutionremote sensing image of PCA and HIS modelrdquo Remote SensingTechnology and Application vol 28 no 1 pp 78ndash84 2013
[10] T-P Wu C-K Tang M S Brown and H-Y Shum ldquoNaturalshadow mattingrdquo ACM Transactions on Graphics vol 26 no 2pp 377ndash388 2007
[11] W Liu and F Yamazaki ldquoObject-based shadow extraction andcorrection of high-resolution optical satellite imagesrdquo IEEEJournal of Selected Topics in Applied Earth Observations andRemote Sensing vol 5 no 4 pp 1296ndash1302 2012
[12] J Besag ldquoStatistical analysis of nonlattice datardquoThe Statisticianvol 24 no 3 pp 179ndash195 1975
[13] J Liu T Fang and D Li ldquoShadow detection in remotelysensed images based on self-adaptive feature selectionrdquo IEEETransactions on Geoscience and Remote Sensing vol 49 no 12pp 5092ndash5103 2011
[14] A Levin D Lischinski and YWeiss ldquoA closed-form solution tonatural image mattingrdquo IEEE Transactions on Pattern Analysisand Machine Intelligence vol 30 no 2 pp 228ndash242 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
Procedure detectShadow(119884)119886119897119901ℎ119886 larr solveAlpha(119884)lowastBy (6)lowastlowast119886119897119901ℎ119886 is an array records the parameter alpha for each pixel sitelowast119875(119884120572
119894119895| 119883120572
119894119895) larr 119886119897119901ℎ119886 lowastBy (7)lowast
1198841015840larrcolorTransform(119884)
119875(1198841015840
119894119895| 119883119894119895) larr 119884
1015840lowastBy (1)lowast119875(119884119894119895| 119883119894119895) larr 119875(119884
120572
119894119895| 119883120572
119894119895) 119875(1198841015840
119894119895| 119883119894119895)
lowastBy (8)lowastinitSeglarr histogramOpacity(119875(119884120572
119894119895| 119883120572
119894119895))
lowastObtain the initial segment according to the histogram of probability computed through the opacity lowastwhile (iter lemaxIter)lowastApply the feature condition probability iteratively until the algorithm reaches the maximum iteration number lowast119875(119883119894= 119896 | 119883
119873119894119895) larr priorPercent (seg 120573)
lowastBy Potts modellowastlowastIn the first iteration seg = initSeglowastseglarrMAPcriteria(119875(119884
119894119895| 119883119894119895) 119875(119883
119894= 119896 | 119883
119873119894119895))
lowastSegment the image into shadows and nonshadows using the MAP criterialowastEndwhile119877119890119904119906119897119905 = seg
Return 119877119890119904119906119897119905
Algorithm 1
where 119896 isin 1 2 and 120575119894119895= |120572119894119895minus(1minus120572
119894119895)| and the parameter 120579
whose value is decided by the histogram of 120575 is a parameterto adjust the effect of intensity and opacity when determiningthe shadow probability
3 MRF Shadow Detection Method
Aiming at partitioning an image into shadows area andnonshadows area the procedure of shadow detection canbe treated as a process of image labeling The thresholdingmethods label each pixel individually based on its intensityIt has some obvious defects The first one is its ignorance ofthe interaction information between neighbors which seri-ously impacts the detection accuracy Besides imprecisionis associated with remote sensing images inherently since apixel always represents an area of the land space which alsomakes the thresholding methods fail to retain enough infor-mation from the original images compared to soft methodsTherefore in this study aiming at obtaining more accuratedetection results we design a soft shadow detection methodby resorting to MRF to incorporate spatial information
Let 119884 denote an intensity image defined on a 119898 times 119899
rectangular lattice set and let 119883 = 11990911 11990912 119909
119898119899 denote
the label field where 119909119894119895isin 1 2 with 1 and 2 indicating
shadow area and nonshadow area respectively In theBayesian image segmentation framework the segmentedimage119883 is obtained by
119909119894119895= argmax
119909119894119895
119875 (119910119894119895| 119883119894119895= 119896) 119875 (119883
119894= 119896 | 119883
119873119894119895) (9)
where 119875(119910119894119895| 119883119894119895= 119896) is the class conditional probability
which represents the characteristics of extracted featuresof pixels In our proposed method the shadow probabilitydescribed in Section 2 is employed as the class conditional
probability 119875(119883119894= 119896 | 119883
119873119894119895) is the prior probability which
defines the interaction between each pixel and its neighborswhere119873
119894119895is the set of neighborhood pixels of pixel (119894 119895) Potts
model is a simple and efficient one to represent the interac-tions of neighboring pixels clearly Although some improvedcomplex Potts models have been proposed the classicalmodel is sufficient enough to this study Therefore for sim-plicity without loss of generality we employ the classical Pottsmodel to describe the label field119883 in our proposed method
Given a remote sensing image 119884 in the visible spectrumthe training samples can be obtained by scribbling differentlines on shadow area and nonshadow area respectively Afterthat the opacity can be estimated by (6) Then the inputimage is transformed into the HSI color space to get thecorresponding transformed intensity image Based on thisthe shadow probabilities are computed and applied in ouriterative shadow extraction procedure
The details of our proposedMRF-based shadowdetectionalgorithm are described as in Algorithm 1
4 Experiments and Discussion
In this section we show the experimental results for verifyingthe performance of the proposed method We implementedall these algorithms in MatLab 2009a The present experi-ments were performed on a personal computer with an IntelPentium Dual-Core 22GHz CPU and 8G random accessMemory under the Microsoft Windows 7 environment
41 Data Sets To evaluate the performance of proposedshadow detection method four pieces of QuickBird urbanimages were chosen The first image shown in Figure 3(a)which is acquired in September 2003 refers to a 280 times 280pixel image in the visible spectrum It mainly consists of grass
Mathematical Problems in Engineering 5
(a) (b)
(c) (d)
Figure 3 Results of different neighborhood size (a) The first QB image (b) result of 3 times 3 (c) result of 5 times 5 and (d) result of 7 times 7
areas buildings and their shadows The next two imagesshow different scenes of Beijing acquired in May 2011 andApril 2011 respectively and their sizes are 300 times 300 and280 times 280 (see Figures 5(a) and 6(a)) They mainly containroads trees grass buildings blue roofs and shadows of treesand buildings The fourth image represents a crop of 256 times256 pixels of the Wuhan University acquired in 2004 (seeFigure 7(a)) There are six land covers roads bared landtrees buildings water and shadows
The main variation among the selected scenes is thecomplexity of scenes contents For example types of landcovers in the first image (Figure 3(a)) are less than the othersMeanwhile in the first image shadows mainly obscured bybuildings are relatively larger whereas in ldquoWuhanUniversityrdquoimage (Figure 7(a)) there are many fragmental tree shadowsin addition to building shadows This different complexitycan affect the performance of our proposed shadow detectionmethod which will be discussed later
42 Parameter Setting Some parameters in our experimentswere chosen empirically In detail 120577 = 20 for intensity trans-form function and 120573 = 03 for Potts model Howeverthe parameter 120579 used in the shadow probability functionshould be set in accordance with specific images because itsvalue is determined by the histogram of 120575 as mentioned inSection 22 In our experiments 098 091 088 and 095 areset as the values of 120579 for Figures 3(a) 5(a) 6(a) and 7(a)respectively
Another important parameter in the proposed MRF-based method is the size of neighborhood Three shadowdetection experiments using different neighborhood sizesnamely 3 times 3 5 times 5 and 7 times 7 were performed on the firstimage And the results shown in Figure 3 represent that thebest choice should be 3 times 3 because it can preserve as muchas possible the image details So such a neighborhood sizehas been adopted in all the following experiments
43 Experiment Setup Before running our detectionmethod a sample image should be prepared by scribblingnonshadows in black and shadows in white In order toget enough samples white scribbles should be placedon all different kinds of land surfaces in shadow areasSimultaneously black scribbles for the nonshadow samplesshould mark all the regions that should not be mixed withshadows
In order to obtain the shadow probability two proceduresare performed one for computing the probability by theopacity image and the other for the transformed intensityimage Figure 4(b) shows the detection result on the first QBimage of shadow probability model using opacity only whileFigure 4(c) displays the result using transformed intensityonly As seen from Figure 4(b) the detection has lost somelittle shadow areas and misclassified some nonshadow pixelsas shadows ones The main reason lies in the insufficiencyof samples in corresponding areas Obviously it is notsufficient to reply on opacity only Simultaneously Figure 4(c)
6 Mathematical Problems in Engineering
(a) (b)
(c) (d)
Figure 4 Results using different probability models (a) the ground truth of the first QB image (b) opacity only (c) intensity only and (d)the proposed soft shadow model
shows that detection using intensity only gets many speckledshadows caused by dark pixels on trees or buildings
Then the final shadow probability is obtained by combin-ing the opacity with transformed intensity As expected theresult using the final probability has obviously less misclas-sifications which is shown in Figure 4(d) In summary thesuperiority of our novel soft shadow model is clearly demon-strated by the comparison of the results shown in Figure 4
44 Results and Discussions
441 Comparative Method In order to verify the superiorityof the proposed shadow detection method to the threshold-ing ones three methods are employed as the competitorsbithreshold method [8] PCAHSI [9] and HI method [7]
(i) Bithreshold method [8] firstly transform the imageinto HIS color space compute the normalized differ-ence of intensity (119868) and saturation (119878) componentsand obtain the initial detection by its thresholdThenget the detection result of 119868 channel by histogramthreshold The final result is obtained by performingAND operation on two detected results mentionedabove
(ii) PCAHSI [9] firstly compute the shadow index (SI)based on principal component transformation and
HIS model Then image is divided into the shadowarea and nonshadow area by SI histogram threshold
(iii) HI method [7] firstly compute the ratio of HI inHSI color space and get initial result by HI thresh-old Then obtain a shape mask by applying a Sobeloperator on the 119868 component Finally by overlappingthe shape mask with the existing shadow mask ofshadowed regions from the logical AND operator ashape-preserved shadow mask is derived
442 Visual Comparison Figures 5 and 6 present the resultson ldquoBeijing scenerdquo images of our proposed method and thecompetitive ones In these experiments the correspondingground truth images (Figures 5(c) and 6(c)) are obtainedby careful photo interpretation Subfigures (d)ndash(g) in bothFigures 5 and 6 show the detection results of bithresholdmethod PCAHSI HI method and the proposed methodrespectively As seen fromFigure 5 the thresholdingmethodsmake seriousmisclassification because the intensity of trees isvery similar to that of shadows Only by using the histogramthresholds the thresholdingmethods are not efficient enoughto distinguish between trees and shadows accurately whilethe proposed method describes each pixel with shadowprobability and decides whether a pixel is a shadow one ornot by considering the neighbor information Therefore theproposed method appears to be the most satisfactory one
Mathematical Problems in Engineering 7
(a) (b) (c)
(d) (e) (f)
(g)
Figure 5 Results on ldquoBeijing scene 1rdquo (a) The QB image (b) sample image (c) the ground truth (d) bithreshold (e) PCAHSI (f) HI and(g) proposed method
The comparison between Figures 6(d)ndash6(f) and 6(g)shows that our proposed method is obviously superior tothe referenced ones The competitive results show manymisclassified speckle noises In these noises some are causedby small dark objects in nonshadow areas and others arecaused by the fragmented shadow of trees As the purposeof the present work is to separate the shadows from theirproducer those are consider as noises However this prob-lem is solved in Figure 6(g) where small misclassificationislands are eliminated by the spatial information betweenneighboring pixels Moreover in Figures 6(d)ndash6(f) somehigh intensity objects in shadow areas are misclassified as
nonshadows which shows that the hard shadow modelscannot accurately represent the nonuniform distributionsof spectral features in shadow areas On the contrary themisclassifications in Figure 6(g) are greatly reduced whichmainly benefits from the accurate nonuniform descriptioncapability of the proposed shadow probability model and thepowerful spatial modeling ability of the MRF used in ourmethod
443 Quantitative Comparisons To obtain a quantitativecomparison between different algorithms both recall andprecision are employed as indicators Recall represents how
8 Mathematical Problems in Engineering
(a) (b) (c)
(d) (e) (f)
(g)
Figure 6 Results on ldquoBeijing scene 2rdquo (a) The QB image (b) sample image (c) the ground truth (d) bithreshold (e) PCAHSI (f) HI and(g) proposed method
many true shadowpixels have been detected as shadowpixelswhich is denoted by
DR =119873119888
119873119905
times 100 (10)
where 119873119905is the number of true shadow pixels which is
counted from a true shadow mask obtained by careful photointerpretation manually and 119873
119888is the number of pixels
correctly detected which is computed by performing ANDoperation on the detected result and the true shadow mask
Precision indicates how many shadow pixels have beendetected correctly which is denoted by
DP =119873119888
119873119889
times 100 (11)
where119873119889is the number of pixels labeled as shadow
From the definition it is easy to conclude that the recallfavors overdetection and the precision favors underdetectionThat is to say high recall combined with a low precisionmeans overdetection shadows
Mathematical Problems in Engineering 9
(a) (b) (c)
(d) (e) (f)
(g)
Figure 7 Results on ldquoWuhan Universityrdquo image (a) The QB image (b) sample image (c) the ground truth (d) bithreshold (e) PCAHSI (f)HI and (g) proposed method
We applied all competitive algorithms and proposedmethod on a ldquoWuhan Universityrdquo QB image shown inFigure 7 Correspondingly we measured the recall and pre-cision of each method and listed their values in Table 1
As seen from Table 1 recall of bithreshold and PCAHSImethods is 1 whereas their precision is only 04601 and05645 respectively which shows that bothmethods obtainedoverdetection results The similar results can also be foundin Figures 7(d) and 7(e) Although the HI method achievedmore accurate result (shown in Figure 7(f)) compared tobithreshold and PCAHSI it still produces serious misdetec-tion islands in the final map From the quantitative resultsas shown in Table 1 it is easy to conclude that the proposed
Table 1 Recall and precision of ldquoWuhan Universityrdquo image
Method Bithreshold PCAHSI HI ProposedDR 1 1 07320 09882DP 04601 05645 06741 07890
method can obtain more accurate shadow detection resultsthan the competitors for its shadow probability models
45 Limits By carefully observing the detection results of theproposedmethod on different images (Figures 5(g) 6(g) and7(g)) we can found that the more complex the surface is
10 Mathematical Problems in Engineering
(a) (b)
(c) (d)
Figure 8 Results on images with different surface (a) The first QB image (b) ldquoWuhan Universityrdquo image (c) result on (a) and (d) result on(b)
Table 2 Recall and precision of images with different surface
Image First QB image Wuhan UniversityDR 1 09882DP 08961 07890
the more dissatisfactory the result will be In order to givea quantitative evaluation we compared the results on thefirst QB image and ldquoWuhan Universityrdquo image (see Figure 8)Their values of recall and precision are listed in Table 2
As mentioned in Section 41 the first QB image containsonly three types of land covers while ldquoWuhan Universityrdquoimage consists of six different types Accordingly the recalland precision for the first QB image are 1 and 08961 respec-tively These values for ldquoWuhan Universityrdquo image descendto 09882 and 078901 respectively The main reason is thatit is hard to provide sufficient samples in a complex imageWhenwe scribbled samples pixels belonging to different landcovers may be selected as the training samples Even worsepixels of the same land covers but with different intensity forexample the light buildings and dark buildings may also beselected A possible way to eliminate this limit is to jointly usethe shape of sample land covers And this may be our futurework
5 Conclusions
In this paper we focus on the design of a soft shadowdescription method where both intensity and opacity areemployed to estimate a soft degree for each pixel to measurethe extent of belonging to shadows Based on the softshadow description MRF-based iterative detection methodis proposed to make full use of the interactions betweenneighboring pixels The proposed method is tested on fourpieces ofQuickBird remote sensing imagesThe experimentalresults have demonstrated that the proposed method canobtain more accurate results compared to three competitors
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is supported in part by the National NaturalScience Foundation of China under Grants 41001251 theKey Technology Projects of Henan province of China (no132102210212) the Key Technology Projects of the Edu-cational Department of Henan Province of China (no
Mathematical Problems in Engineering 11
13A520011) and the Excellent Youth Teacher of Henan Edu-cational Department of China (2011)
References
[1] C Jaynes S Webb R M Steele M Brown and W B SealesldquoDynamic shadow removal from front projection displaysrdquo inProceedings of the IEEEConference onVisualization pp 175ndash182October 2001
[2] A M Polidorio F C Flores N N Imai et al ldquoAutomaticshadow segmentation in aerial color imagesrdquo in Proceedings ofthe 16th Brazilian Symposium on Computer Graphics and ImageProcessing (SIBGRAPI rsquo03) pp 270ndash277 October 2003
[3] J Huang W Xie and L Tang ldquoDetection of and compensationfor shadows in colored urban aerial imagesrdquo in Proceedings ofthe 5th World Congress on Intelligent Control and Automation(WCICA rsquo04) vol 4 pp 3098ndash3100 June 2004
[4] MHaijianQQiming and S Xinyi ldquoShadow segmentation andcompensation in high resolution satellite imagesrdquo in Proceed-ings of the IEEE International Geoscience and Remote SensingSymposium pp II1036ndashII1039 Boston Mass USA usa July2008
[5] V Arevalo J Gonzalez and G Ambrosio ldquoShadow detection incolour high-resolution satellite imagesrdquo International Journal ofRemote Sensing vol 29 no 7 pp 1945ndash1963 2008
[6] T Gevers and A W M Smeulders ldquoColor-based object recog-nitionrdquo Pattern Recognition vol 32 no 3 pp 453ndash464 1999
[7] V J D Tsai ldquoA comparative study on shadow compensation ofcolor aerial images in invariant color modelsrdquo IEEE Transac-tions on Geoscience and Remote Sensing vol 44 no 6 pp 1661ndash1671 2006
[8] J Yang Z Zhao and J Yang ldquoA shadow removal methodfor high resolution remote sensing imagerdquo Geomatics andInformation Science of Wuhan University vol 33 no 1 pp 17ndash20 2008
[9] H Liu andTXie ldquoStudy on shadowdetection in high resolutionremote sensing image of PCA and HIS modelrdquo Remote SensingTechnology and Application vol 28 no 1 pp 78ndash84 2013
[10] T-P Wu C-K Tang M S Brown and H-Y Shum ldquoNaturalshadow mattingrdquo ACM Transactions on Graphics vol 26 no 2pp 377ndash388 2007
[11] W Liu and F Yamazaki ldquoObject-based shadow extraction andcorrection of high-resolution optical satellite imagesrdquo IEEEJournal of Selected Topics in Applied Earth Observations andRemote Sensing vol 5 no 4 pp 1296ndash1302 2012
[12] J Besag ldquoStatistical analysis of nonlattice datardquoThe Statisticianvol 24 no 3 pp 179ndash195 1975
[13] J Liu T Fang and D Li ldquoShadow detection in remotelysensed images based on self-adaptive feature selectionrdquo IEEETransactions on Geoscience and Remote Sensing vol 49 no 12pp 5092ndash5103 2011
[14] A Levin D Lischinski and YWeiss ldquoA closed-form solution tonatural image mattingrdquo IEEE Transactions on Pattern Analysisand Machine Intelligence vol 30 no 2 pp 228ndash242 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
(a) (b)
(c) (d)
Figure 3 Results of different neighborhood size (a) The first QB image (b) result of 3 times 3 (c) result of 5 times 5 and (d) result of 7 times 7
areas buildings and their shadows The next two imagesshow different scenes of Beijing acquired in May 2011 andApril 2011 respectively and their sizes are 300 times 300 and280 times 280 (see Figures 5(a) and 6(a)) They mainly containroads trees grass buildings blue roofs and shadows of treesand buildings The fourth image represents a crop of 256 times256 pixels of the Wuhan University acquired in 2004 (seeFigure 7(a)) There are six land covers roads bared landtrees buildings water and shadows
The main variation among the selected scenes is thecomplexity of scenes contents For example types of landcovers in the first image (Figure 3(a)) are less than the othersMeanwhile in the first image shadows mainly obscured bybuildings are relatively larger whereas in ldquoWuhanUniversityrdquoimage (Figure 7(a)) there are many fragmental tree shadowsin addition to building shadows This different complexitycan affect the performance of our proposed shadow detectionmethod which will be discussed later
42 Parameter Setting Some parameters in our experimentswere chosen empirically In detail 120577 = 20 for intensity trans-form function and 120573 = 03 for Potts model Howeverthe parameter 120579 used in the shadow probability functionshould be set in accordance with specific images because itsvalue is determined by the histogram of 120575 as mentioned inSection 22 In our experiments 098 091 088 and 095 areset as the values of 120579 for Figures 3(a) 5(a) 6(a) and 7(a)respectively
Another important parameter in the proposed MRF-based method is the size of neighborhood Three shadowdetection experiments using different neighborhood sizesnamely 3 times 3 5 times 5 and 7 times 7 were performed on the firstimage And the results shown in Figure 3 represent that thebest choice should be 3 times 3 because it can preserve as muchas possible the image details So such a neighborhood sizehas been adopted in all the following experiments
43 Experiment Setup Before running our detectionmethod a sample image should be prepared by scribblingnonshadows in black and shadows in white In order toget enough samples white scribbles should be placedon all different kinds of land surfaces in shadow areasSimultaneously black scribbles for the nonshadow samplesshould mark all the regions that should not be mixed withshadows
In order to obtain the shadow probability two proceduresare performed one for computing the probability by theopacity image and the other for the transformed intensityimage Figure 4(b) shows the detection result on the first QBimage of shadow probability model using opacity only whileFigure 4(c) displays the result using transformed intensityonly As seen from Figure 4(b) the detection has lost somelittle shadow areas and misclassified some nonshadow pixelsas shadows ones The main reason lies in the insufficiencyof samples in corresponding areas Obviously it is notsufficient to reply on opacity only Simultaneously Figure 4(c)
6 Mathematical Problems in Engineering
(a) (b)
(c) (d)
Figure 4 Results using different probability models (a) the ground truth of the first QB image (b) opacity only (c) intensity only and (d)the proposed soft shadow model
shows that detection using intensity only gets many speckledshadows caused by dark pixels on trees or buildings
Then the final shadow probability is obtained by combin-ing the opacity with transformed intensity As expected theresult using the final probability has obviously less misclas-sifications which is shown in Figure 4(d) In summary thesuperiority of our novel soft shadow model is clearly demon-strated by the comparison of the results shown in Figure 4
44 Results and Discussions
441 Comparative Method In order to verify the superiorityof the proposed shadow detection method to the threshold-ing ones three methods are employed as the competitorsbithreshold method [8] PCAHSI [9] and HI method [7]
(i) Bithreshold method [8] firstly transform the imageinto HIS color space compute the normalized differ-ence of intensity (119868) and saturation (119878) componentsand obtain the initial detection by its thresholdThenget the detection result of 119868 channel by histogramthreshold The final result is obtained by performingAND operation on two detected results mentionedabove
(ii) PCAHSI [9] firstly compute the shadow index (SI)based on principal component transformation and
HIS model Then image is divided into the shadowarea and nonshadow area by SI histogram threshold
(iii) HI method [7] firstly compute the ratio of HI inHSI color space and get initial result by HI thresh-old Then obtain a shape mask by applying a Sobeloperator on the 119868 component Finally by overlappingthe shape mask with the existing shadow mask ofshadowed regions from the logical AND operator ashape-preserved shadow mask is derived
442 Visual Comparison Figures 5 and 6 present the resultson ldquoBeijing scenerdquo images of our proposed method and thecompetitive ones In these experiments the correspondingground truth images (Figures 5(c) and 6(c)) are obtainedby careful photo interpretation Subfigures (d)ndash(g) in bothFigures 5 and 6 show the detection results of bithresholdmethod PCAHSI HI method and the proposed methodrespectively As seen fromFigure 5 the thresholdingmethodsmake seriousmisclassification because the intensity of trees isvery similar to that of shadows Only by using the histogramthresholds the thresholdingmethods are not efficient enoughto distinguish between trees and shadows accurately whilethe proposed method describes each pixel with shadowprobability and decides whether a pixel is a shadow one ornot by considering the neighbor information Therefore theproposed method appears to be the most satisfactory one
Mathematical Problems in Engineering 7
(a) (b) (c)
(d) (e) (f)
(g)
Figure 5 Results on ldquoBeijing scene 1rdquo (a) The QB image (b) sample image (c) the ground truth (d) bithreshold (e) PCAHSI (f) HI and(g) proposed method
The comparison between Figures 6(d)ndash6(f) and 6(g)shows that our proposed method is obviously superior tothe referenced ones The competitive results show manymisclassified speckle noises In these noises some are causedby small dark objects in nonshadow areas and others arecaused by the fragmented shadow of trees As the purposeof the present work is to separate the shadows from theirproducer those are consider as noises However this prob-lem is solved in Figure 6(g) where small misclassificationislands are eliminated by the spatial information betweenneighboring pixels Moreover in Figures 6(d)ndash6(f) somehigh intensity objects in shadow areas are misclassified as
nonshadows which shows that the hard shadow modelscannot accurately represent the nonuniform distributionsof spectral features in shadow areas On the contrary themisclassifications in Figure 6(g) are greatly reduced whichmainly benefits from the accurate nonuniform descriptioncapability of the proposed shadow probability model and thepowerful spatial modeling ability of the MRF used in ourmethod
443 Quantitative Comparisons To obtain a quantitativecomparison between different algorithms both recall andprecision are employed as indicators Recall represents how
8 Mathematical Problems in Engineering
(a) (b) (c)
(d) (e) (f)
(g)
Figure 6 Results on ldquoBeijing scene 2rdquo (a) The QB image (b) sample image (c) the ground truth (d) bithreshold (e) PCAHSI (f) HI and(g) proposed method
many true shadowpixels have been detected as shadowpixelswhich is denoted by
DR =119873119888
119873119905
times 100 (10)
where 119873119905is the number of true shadow pixels which is
counted from a true shadow mask obtained by careful photointerpretation manually and 119873
119888is the number of pixels
correctly detected which is computed by performing ANDoperation on the detected result and the true shadow mask
Precision indicates how many shadow pixels have beendetected correctly which is denoted by
DP =119873119888
119873119889
times 100 (11)
where119873119889is the number of pixels labeled as shadow
From the definition it is easy to conclude that the recallfavors overdetection and the precision favors underdetectionThat is to say high recall combined with a low precisionmeans overdetection shadows
Mathematical Problems in Engineering 9
(a) (b) (c)
(d) (e) (f)
(g)
Figure 7 Results on ldquoWuhan Universityrdquo image (a) The QB image (b) sample image (c) the ground truth (d) bithreshold (e) PCAHSI (f)HI and (g) proposed method
We applied all competitive algorithms and proposedmethod on a ldquoWuhan Universityrdquo QB image shown inFigure 7 Correspondingly we measured the recall and pre-cision of each method and listed their values in Table 1
As seen from Table 1 recall of bithreshold and PCAHSImethods is 1 whereas their precision is only 04601 and05645 respectively which shows that bothmethods obtainedoverdetection results The similar results can also be foundin Figures 7(d) and 7(e) Although the HI method achievedmore accurate result (shown in Figure 7(f)) compared tobithreshold and PCAHSI it still produces serious misdetec-tion islands in the final map From the quantitative resultsas shown in Table 1 it is easy to conclude that the proposed
Table 1 Recall and precision of ldquoWuhan Universityrdquo image
Method Bithreshold PCAHSI HI ProposedDR 1 1 07320 09882DP 04601 05645 06741 07890
method can obtain more accurate shadow detection resultsthan the competitors for its shadow probability models
45 Limits By carefully observing the detection results of theproposedmethod on different images (Figures 5(g) 6(g) and7(g)) we can found that the more complex the surface is
10 Mathematical Problems in Engineering
(a) (b)
(c) (d)
Figure 8 Results on images with different surface (a) The first QB image (b) ldquoWuhan Universityrdquo image (c) result on (a) and (d) result on(b)
Table 2 Recall and precision of images with different surface
Image First QB image Wuhan UniversityDR 1 09882DP 08961 07890
the more dissatisfactory the result will be In order to givea quantitative evaluation we compared the results on thefirst QB image and ldquoWuhan Universityrdquo image (see Figure 8)Their values of recall and precision are listed in Table 2
As mentioned in Section 41 the first QB image containsonly three types of land covers while ldquoWuhan Universityrdquoimage consists of six different types Accordingly the recalland precision for the first QB image are 1 and 08961 respec-tively These values for ldquoWuhan Universityrdquo image descendto 09882 and 078901 respectively The main reason is thatit is hard to provide sufficient samples in a complex imageWhenwe scribbled samples pixels belonging to different landcovers may be selected as the training samples Even worsepixels of the same land covers but with different intensity forexample the light buildings and dark buildings may also beselected A possible way to eliminate this limit is to jointly usethe shape of sample land covers And this may be our futurework
5 Conclusions
In this paper we focus on the design of a soft shadowdescription method where both intensity and opacity areemployed to estimate a soft degree for each pixel to measurethe extent of belonging to shadows Based on the softshadow description MRF-based iterative detection methodis proposed to make full use of the interactions betweenneighboring pixels The proposed method is tested on fourpieces ofQuickBird remote sensing imagesThe experimentalresults have demonstrated that the proposed method canobtain more accurate results compared to three competitors
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is supported in part by the National NaturalScience Foundation of China under Grants 41001251 theKey Technology Projects of Henan province of China (no132102210212) the Key Technology Projects of the Edu-cational Department of Henan Province of China (no
Mathematical Problems in Engineering 11
13A520011) and the Excellent Youth Teacher of Henan Edu-cational Department of China (2011)
References
[1] C Jaynes S Webb R M Steele M Brown and W B SealesldquoDynamic shadow removal from front projection displaysrdquo inProceedings of the IEEEConference onVisualization pp 175ndash182October 2001
[2] A M Polidorio F C Flores N N Imai et al ldquoAutomaticshadow segmentation in aerial color imagesrdquo in Proceedings ofthe 16th Brazilian Symposium on Computer Graphics and ImageProcessing (SIBGRAPI rsquo03) pp 270ndash277 October 2003
[3] J Huang W Xie and L Tang ldquoDetection of and compensationfor shadows in colored urban aerial imagesrdquo in Proceedings ofthe 5th World Congress on Intelligent Control and Automation(WCICA rsquo04) vol 4 pp 3098ndash3100 June 2004
[4] MHaijianQQiming and S Xinyi ldquoShadow segmentation andcompensation in high resolution satellite imagesrdquo in Proceed-ings of the IEEE International Geoscience and Remote SensingSymposium pp II1036ndashII1039 Boston Mass USA usa July2008
[5] V Arevalo J Gonzalez and G Ambrosio ldquoShadow detection incolour high-resolution satellite imagesrdquo International Journal ofRemote Sensing vol 29 no 7 pp 1945ndash1963 2008
[6] T Gevers and A W M Smeulders ldquoColor-based object recog-nitionrdquo Pattern Recognition vol 32 no 3 pp 453ndash464 1999
[7] V J D Tsai ldquoA comparative study on shadow compensation ofcolor aerial images in invariant color modelsrdquo IEEE Transac-tions on Geoscience and Remote Sensing vol 44 no 6 pp 1661ndash1671 2006
[8] J Yang Z Zhao and J Yang ldquoA shadow removal methodfor high resolution remote sensing imagerdquo Geomatics andInformation Science of Wuhan University vol 33 no 1 pp 17ndash20 2008
[9] H Liu andTXie ldquoStudy on shadowdetection in high resolutionremote sensing image of PCA and HIS modelrdquo Remote SensingTechnology and Application vol 28 no 1 pp 78ndash84 2013
[10] T-P Wu C-K Tang M S Brown and H-Y Shum ldquoNaturalshadow mattingrdquo ACM Transactions on Graphics vol 26 no 2pp 377ndash388 2007
[11] W Liu and F Yamazaki ldquoObject-based shadow extraction andcorrection of high-resolution optical satellite imagesrdquo IEEEJournal of Selected Topics in Applied Earth Observations andRemote Sensing vol 5 no 4 pp 1296ndash1302 2012
[12] J Besag ldquoStatistical analysis of nonlattice datardquoThe Statisticianvol 24 no 3 pp 179ndash195 1975
[13] J Liu T Fang and D Li ldquoShadow detection in remotelysensed images based on self-adaptive feature selectionrdquo IEEETransactions on Geoscience and Remote Sensing vol 49 no 12pp 5092ndash5103 2011
[14] A Levin D Lischinski and YWeiss ldquoA closed-form solution tonatural image mattingrdquo IEEE Transactions on Pattern Analysisand Machine Intelligence vol 30 no 2 pp 228ndash242 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
(a) (b)
(c) (d)
Figure 4 Results using different probability models (a) the ground truth of the first QB image (b) opacity only (c) intensity only and (d)the proposed soft shadow model
shows that detection using intensity only gets many speckledshadows caused by dark pixels on trees or buildings
Then the final shadow probability is obtained by combin-ing the opacity with transformed intensity As expected theresult using the final probability has obviously less misclas-sifications which is shown in Figure 4(d) In summary thesuperiority of our novel soft shadow model is clearly demon-strated by the comparison of the results shown in Figure 4
44 Results and Discussions
441 Comparative Method In order to verify the superiorityof the proposed shadow detection method to the threshold-ing ones three methods are employed as the competitorsbithreshold method [8] PCAHSI [9] and HI method [7]
(i) Bithreshold method [8] firstly transform the imageinto HIS color space compute the normalized differ-ence of intensity (119868) and saturation (119878) componentsand obtain the initial detection by its thresholdThenget the detection result of 119868 channel by histogramthreshold The final result is obtained by performingAND operation on two detected results mentionedabove
(ii) PCAHSI [9] firstly compute the shadow index (SI)based on principal component transformation and
HIS model Then image is divided into the shadowarea and nonshadow area by SI histogram threshold
(iii) HI method [7] firstly compute the ratio of HI inHSI color space and get initial result by HI thresh-old Then obtain a shape mask by applying a Sobeloperator on the 119868 component Finally by overlappingthe shape mask with the existing shadow mask ofshadowed regions from the logical AND operator ashape-preserved shadow mask is derived
442 Visual Comparison Figures 5 and 6 present the resultson ldquoBeijing scenerdquo images of our proposed method and thecompetitive ones In these experiments the correspondingground truth images (Figures 5(c) and 6(c)) are obtainedby careful photo interpretation Subfigures (d)ndash(g) in bothFigures 5 and 6 show the detection results of bithresholdmethod PCAHSI HI method and the proposed methodrespectively As seen fromFigure 5 the thresholdingmethodsmake seriousmisclassification because the intensity of trees isvery similar to that of shadows Only by using the histogramthresholds the thresholdingmethods are not efficient enoughto distinguish between trees and shadows accurately whilethe proposed method describes each pixel with shadowprobability and decides whether a pixel is a shadow one ornot by considering the neighbor information Therefore theproposed method appears to be the most satisfactory one
Mathematical Problems in Engineering 7
(a) (b) (c)
(d) (e) (f)
(g)
Figure 5 Results on ldquoBeijing scene 1rdquo (a) The QB image (b) sample image (c) the ground truth (d) bithreshold (e) PCAHSI (f) HI and(g) proposed method
The comparison between Figures 6(d)ndash6(f) and 6(g)shows that our proposed method is obviously superior tothe referenced ones The competitive results show manymisclassified speckle noises In these noises some are causedby small dark objects in nonshadow areas and others arecaused by the fragmented shadow of trees As the purposeof the present work is to separate the shadows from theirproducer those are consider as noises However this prob-lem is solved in Figure 6(g) where small misclassificationislands are eliminated by the spatial information betweenneighboring pixels Moreover in Figures 6(d)ndash6(f) somehigh intensity objects in shadow areas are misclassified as
nonshadows which shows that the hard shadow modelscannot accurately represent the nonuniform distributionsof spectral features in shadow areas On the contrary themisclassifications in Figure 6(g) are greatly reduced whichmainly benefits from the accurate nonuniform descriptioncapability of the proposed shadow probability model and thepowerful spatial modeling ability of the MRF used in ourmethod
443 Quantitative Comparisons To obtain a quantitativecomparison between different algorithms both recall andprecision are employed as indicators Recall represents how
8 Mathematical Problems in Engineering
(a) (b) (c)
(d) (e) (f)
(g)
Figure 6 Results on ldquoBeijing scene 2rdquo (a) The QB image (b) sample image (c) the ground truth (d) bithreshold (e) PCAHSI (f) HI and(g) proposed method
many true shadowpixels have been detected as shadowpixelswhich is denoted by
DR =119873119888
119873119905
times 100 (10)
where 119873119905is the number of true shadow pixels which is
counted from a true shadow mask obtained by careful photointerpretation manually and 119873
119888is the number of pixels
correctly detected which is computed by performing ANDoperation on the detected result and the true shadow mask
Precision indicates how many shadow pixels have beendetected correctly which is denoted by
DP =119873119888
119873119889
times 100 (11)
where119873119889is the number of pixels labeled as shadow
From the definition it is easy to conclude that the recallfavors overdetection and the precision favors underdetectionThat is to say high recall combined with a low precisionmeans overdetection shadows
Mathematical Problems in Engineering 9
(a) (b) (c)
(d) (e) (f)
(g)
Figure 7 Results on ldquoWuhan Universityrdquo image (a) The QB image (b) sample image (c) the ground truth (d) bithreshold (e) PCAHSI (f)HI and (g) proposed method
We applied all competitive algorithms and proposedmethod on a ldquoWuhan Universityrdquo QB image shown inFigure 7 Correspondingly we measured the recall and pre-cision of each method and listed their values in Table 1
As seen from Table 1 recall of bithreshold and PCAHSImethods is 1 whereas their precision is only 04601 and05645 respectively which shows that bothmethods obtainedoverdetection results The similar results can also be foundin Figures 7(d) and 7(e) Although the HI method achievedmore accurate result (shown in Figure 7(f)) compared tobithreshold and PCAHSI it still produces serious misdetec-tion islands in the final map From the quantitative resultsas shown in Table 1 it is easy to conclude that the proposed
Table 1 Recall and precision of ldquoWuhan Universityrdquo image
Method Bithreshold PCAHSI HI ProposedDR 1 1 07320 09882DP 04601 05645 06741 07890
method can obtain more accurate shadow detection resultsthan the competitors for its shadow probability models
45 Limits By carefully observing the detection results of theproposedmethod on different images (Figures 5(g) 6(g) and7(g)) we can found that the more complex the surface is
10 Mathematical Problems in Engineering
(a) (b)
(c) (d)
Figure 8 Results on images with different surface (a) The first QB image (b) ldquoWuhan Universityrdquo image (c) result on (a) and (d) result on(b)
Table 2 Recall and precision of images with different surface
Image First QB image Wuhan UniversityDR 1 09882DP 08961 07890
the more dissatisfactory the result will be In order to givea quantitative evaluation we compared the results on thefirst QB image and ldquoWuhan Universityrdquo image (see Figure 8)Their values of recall and precision are listed in Table 2
As mentioned in Section 41 the first QB image containsonly three types of land covers while ldquoWuhan Universityrdquoimage consists of six different types Accordingly the recalland precision for the first QB image are 1 and 08961 respec-tively These values for ldquoWuhan Universityrdquo image descendto 09882 and 078901 respectively The main reason is thatit is hard to provide sufficient samples in a complex imageWhenwe scribbled samples pixels belonging to different landcovers may be selected as the training samples Even worsepixels of the same land covers but with different intensity forexample the light buildings and dark buildings may also beselected A possible way to eliminate this limit is to jointly usethe shape of sample land covers And this may be our futurework
5 Conclusions
In this paper we focus on the design of a soft shadowdescription method where both intensity and opacity areemployed to estimate a soft degree for each pixel to measurethe extent of belonging to shadows Based on the softshadow description MRF-based iterative detection methodis proposed to make full use of the interactions betweenneighboring pixels The proposed method is tested on fourpieces ofQuickBird remote sensing imagesThe experimentalresults have demonstrated that the proposed method canobtain more accurate results compared to three competitors
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is supported in part by the National NaturalScience Foundation of China under Grants 41001251 theKey Technology Projects of Henan province of China (no132102210212) the Key Technology Projects of the Edu-cational Department of Henan Province of China (no
Mathematical Problems in Engineering 11
13A520011) and the Excellent Youth Teacher of Henan Edu-cational Department of China (2011)
References
[1] C Jaynes S Webb R M Steele M Brown and W B SealesldquoDynamic shadow removal from front projection displaysrdquo inProceedings of the IEEEConference onVisualization pp 175ndash182October 2001
[2] A M Polidorio F C Flores N N Imai et al ldquoAutomaticshadow segmentation in aerial color imagesrdquo in Proceedings ofthe 16th Brazilian Symposium on Computer Graphics and ImageProcessing (SIBGRAPI rsquo03) pp 270ndash277 October 2003
[3] J Huang W Xie and L Tang ldquoDetection of and compensationfor shadows in colored urban aerial imagesrdquo in Proceedings ofthe 5th World Congress on Intelligent Control and Automation(WCICA rsquo04) vol 4 pp 3098ndash3100 June 2004
[4] MHaijianQQiming and S Xinyi ldquoShadow segmentation andcompensation in high resolution satellite imagesrdquo in Proceed-ings of the IEEE International Geoscience and Remote SensingSymposium pp II1036ndashII1039 Boston Mass USA usa July2008
[5] V Arevalo J Gonzalez and G Ambrosio ldquoShadow detection incolour high-resolution satellite imagesrdquo International Journal ofRemote Sensing vol 29 no 7 pp 1945ndash1963 2008
[6] T Gevers and A W M Smeulders ldquoColor-based object recog-nitionrdquo Pattern Recognition vol 32 no 3 pp 453ndash464 1999
[7] V J D Tsai ldquoA comparative study on shadow compensation ofcolor aerial images in invariant color modelsrdquo IEEE Transac-tions on Geoscience and Remote Sensing vol 44 no 6 pp 1661ndash1671 2006
[8] J Yang Z Zhao and J Yang ldquoA shadow removal methodfor high resolution remote sensing imagerdquo Geomatics andInformation Science of Wuhan University vol 33 no 1 pp 17ndash20 2008
[9] H Liu andTXie ldquoStudy on shadowdetection in high resolutionremote sensing image of PCA and HIS modelrdquo Remote SensingTechnology and Application vol 28 no 1 pp 78ndash84 2013
[10] T-P Wu C-K Tang M S Brown and H-Y Shum ldquoNaturalshadow mattingrdquo ACM Transactions on Graphics vol 26 no 2pp 377ndash388 2007
[11] W Liu and F Yamazaki ldquoObject-based shadow extraction andcorrection of high-resolution optical satellite imagesrdquo IEEEJournal of Selected Topics in Applied Earth Observations andRemote Sensing vol 5 no 4 pp 1296ndash1302 2012
[12] J Besag ldquoStatistical analysis of nonlattice datardquoThe Statisticianvol 24 no 3 pp 179ndash195 1975
[13] J Liu T Fang and D Li ldquoShadow detection in remotelysensed images based on self-adaptive feature selectionrdquo IEEETransactions on Geoscience and Remote Sensing vol 49 no 12pp 5092ndash5103 2011
[14] A Levin D Lischinski and YWeiss ldquoA closed-form solution tonatural image mattingrdquo IEEE Transactions on Pattern Analysisand Machine Intelligence vol 30 no 2 pp 228ndash242 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
(a) (b) (c)
(d) (e) (f)
(g)
Figure 5 Results on ldquoBeijing scene 1rdquo (a) The QB image (b) sample image (c) the ground truth (d) bithreshold (e) PCAHSI (f) HI and(g) proposed method
The comparison between Figures 6(d)ndash6(f) and 6(g)shows that our proposed method is obviously superior tothe referenced ones The competitive results show manymisclassified speckle noises In these noises some are causedby small dark objects in nonshadow areas and others arecaused by the fragmented shadow of trees As the purposeof the present work is to separate the shadows from theirproducer those are consider as noises However this prob-lem is solved in Figure 6(g) where small misclassificationislands are eliminated by the spatial information betweenneighboring pixels Moreover in Figures 6(d)ndash6(f) somehigh intensity objects in shadow areas are misclassified as
nonshadows which shows that the hard shadow modelscannot accurately represent the nonuniform distributionsof spectral features in shadow areas On the contrary themisclassifications in Figure 6(g) are greatly reduced whichmainly benefits from the accurate nonuniform descriptioncapability of the proposed shadow probability model and thepowerful spatial modeling ability of the MRF used in ourmethod
443 Quantitative Comparisons To obtain a quantitativecomparison between different algorithms both recall andprecision are employed as indicators Recall represents how
8 Mathematical Problems in Engineering
(a) (b) (c)
(d) (e) (f)
(g)
Figure 6 Results on ldquoBeijing scene 2rdquo (a) The QB image (b) sample image (c) the ground truth (d) bithreshold (e) PCAHSI (f) HI and(g) proposed method
many true shadowpixels have been detected as shadowpixelswhich is denoted by
DR =119873119888
119873119905
times 100 (10)
where 119873119905is the number of true shadow pixels which is
counted from a true shadow mask obtained by careful photointerpretation manually and 119873
119888is the number of pixels
correctly detected which is computed by performing ANDoperation on the detected result and the true shadow mask
Precision indicates how many shadow pixels have beendetected correctly which is denoted by
DP =119873119888
119873119889
times 100 (11)
where119873119889is the number of pixels labeled as shadow
From the definition it is easy to conclude that the recallfavors overdetection and the precision favors underdetectionThat is to say high recall combined with a low precisionmeans overdetection shadows
Mathematical Problems in Engineering 9
(a) (b) (c)
(d) (e) (f)
(g)
Figure 7 Results on ldquoWuhan Universityrdquo image (a) The QB image (b) sample image (c) the ground truth (d) bithreshold (e) PCAHSI (f)HI and (g) proposed method
We applied all competitive algorithms and proposedmethod on a ldquoWuhan Universityrdquo QB image shown inFigure 7 Correspondingly we measured the recall and pre-cision of each method and listed their values in Table 1
As seen from Table 1 recall of bithreshold and PCAHSImethods is 1 whereas their precision is only 04601 and05645 respectively which shows that bothmethods obtainedoverdetection results The similar results can also be foundin Figures 7(d) and 7(e) Although the HI method achievedmore accurate result (shown in Figure 7(f)) compared tobithreshold and PCAHSI it still produces serious misdetec-tion islands in the final map From the quantitative resultsas shown in Table 1 it is easy to conclude that the proposed
Table 1 Recall and precision of ldquoWuhan Universityrdquo image
Method Bithreshold PCAHSI HI ProposedDR 1 1 07320 09882DP 04601 05645 06741 07890
method can obtain more accurate shadow detection resultsthan the competitors for its shadow probability models
45 Limits By carefully observing the detection results of theproposedmethod on different images (Figures 5(g) 6(g) and7(g)) we can found that the more complex the surface is
10 Mathematical Problems in Engineering
(a) (b)
(c) (d)
Figure 8 Results on images with different surface (a) The first QB image (b) ldquoWuhan Universityrdquo image (c) result on (a) and (d) result on(b)
Table 2 Recall and precision of images with different surface
Image First QB image Wuhan UniversityDR 1 09882DP 08961 07890
the more dissatisfactory the result will be In order to givea quantitative evaluation we compared the results on thefirst QB image and ldquoWuhan Universityrdquo image (see Figure 8)Their values of recall and precision are listed in Table 2
As mentioned in Section 41 the first QB image containsonly three types of land covers while ldquoWuhan Universityrdquoimage consists of six different types Accordingly the recalland precision for the first QB image are 1 and 08961 respec-tively These values for ldquoWuhan Universityrdquo image descendto 09882 and 078901 respectively The main reason is thatit is hard to provide sufficient samples in a complex imageWhenwe scribbled samples pixels belonging to different landcovers may be selected as the training samples Even worsepixels of the same land covers but with different intensity forexample the light buildings and dark buildings may also beselected A possible way to eliminate this limit is to jointly usethe shape of sample land covers And this may be our futurework
5 Conclusions
In this paper we focus on the design of a soft shadowdescription method where both intensity and opacity areemployed to estimate a soft degree for each pixel to measurethe extent of belonging to shadows Based on the softshadow description MRF-based iterative detection methodis proposed to make full use of the interactions betweenneighboring pixels The proposed method is tested on fourpieces ofQuickBird remote sensing imagesThe experimentalresults have demonstrated that the proposed method canobtain more accurate results compared to three competitors
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is supported in part by the National NaturalScience Foundation of China under Grants 41001251 theKey Technology Projects of Henan province of China (no132102210212) the Key Technology Projects of the Edu-cational Department of Henan Province of China (no
Mathematical Problems in Engineering 11
13A520011) and the Excellent Youth Teacher of Henan Edu-cational Department of China (2011)
References
[1] C Jaynes S Webb R M Steele M Brown and W B SealesldquoDynamic shadow removal from front projection displaysrdquo inProceedings of the IEEEConference onVisualization pp 175ndash182October 2001
[2] A M Polidorio F C Flores N N Imai et al ldquoAutomaticshadow segmentation in aerial color imagesrdquo in Proceedings ofthe 16th Brazilian Symposium on Computer Graphics and ImageProcessing (SIBGRAPI rsquo03) pp 270ndash277 October 2003
[3] J Huang W Xie and L Tang ldquoDetection of and compensationfor shadows in colored urban aerial imagesrdquo in Proceedings ofthe 5th World Congress on Intelligent Control and Automation(WCICA rsquo04) vol 4 pp 3098ndash3100 June 2004
[4] MHaijianQQiming and S Xinyi ldquoShadow segmentation andcompensation in high resolution satellite imagesrdquo in Proceed-ings of the IEEE International Geoscience and Remote SensingSymposium pp II1036ndashII1039 Boston Mass USA usa July2008
[5] V Arevalo J Gonzalez and G Ambrosio ldquoShadow detection incolour high-resolution satellite imagesrdquo International Journal ofRemote Sensing vol 29 no 7 pp 1945ndash1963 2008
[6] T Gevers and A W M Smeulders ldquoColor-based object recog-nitionrdquo Pattern Recognition vol 32 no 3 pp 453ndash464 1999
[7] V J D Tsai ldquoA comparative study on shadow compensation ofcolor aerial images in invariant color modelsrdquo IEEE Transac-tions on Geoscience and Remote Sensing vol 44 no 6 pp 1661ndash1671 2006
[8] J Yang Z Zhao and J Yang ldquoA shadow removal methodfor high resolution remote sensing imagerdquo Geomatics andInformation Science of Wuhan University vol 33 no 1 pp 17ndash20 2008
[9] H Liu andTXie ldquoStudy on shadowdetection in high resolutionremote sensing image of PCA and HIS modelrdquo Remote SensingTechnology and Application vol 28 no 1 pp 78ndash84 2013
[10] T-P Wu C-K Tang M S Brown and H-Y Shum ldquoNaturalshadow mattingrdquo ACM Transactions on Graphics vol 26 no 2pp 377ndash388 2007
[11] W Liu and F Yamazaki ldquoObject-based shadow extraction andcorrection of high-resolution optical satellite imagesrdquo IEEEJournal of Selected Topics in Applied Earth Observations andRemote Sensing vol 5 no 4 pp 1296ndash1302 2012
[12] J Besag ldquoStatistical analysis of nonlattice datardquoThe Statisticianvol 24 no 3 pp 179ndash195 1975
[13] J Liu T Fang and D Li ldquoShadow detection in remotelysensed images based on self-adaptive feature selectionrdquo IEEETransactions on Geoscience and Remote Sensing vol 49 no 12pp 5092ndash5103 2011
[14] A Levin D Lischinski and YWeiss ldquoA closed-form solution tonatural image mattingrdquo IEEE Transactions on Pattern Analysisand Machine Intelligence vol 30 no 2 pp 228ndash242 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
(a) (b) (c)
(d) (e) (f)
(g)
Figure 6 Results on ldquoBeijing scene 2rdquo (a) The QB image (b) sample image (c) the ground truth (d) bithreshold (e) PCAHSI (f) HI and(g) proposed method
many true shadowpixels have been detected as shadowpixelswhich is denoted by
DR =119873119888
119873119905
times 100 (10)
where 119873119905is the number of true shadow pixels which is
counted from a true shadow mask obtained by careful photointerpretation manually and 119873
119888is the number of pixels
correctly detected which is computed by performing ANDoperation on the detected result and the true shadow mask
Precision indicates how many shadow pixels have beendetected correctly which is denoted by
DP =119873119888
119873119889
times 100 (11)
where119873119889is the number of pixels labeled as shadow
From the definition it is easy to conclude that the recallfavors overdetection and the precision favors underdetectionThat is to say high recall combined with a low precisionmeans overdetection shadows
Mathematical Problems in Engineering 9
(a) (b) (c)
(d) (e) (f)
(g)
Figure 7 Results on ldquoWuhan Universityrdquo image (a) The QB image (b) sample image (c) the ground truth (d) bithreshold (e) PCAHSI (f)HI and (g) proposed method
We applied all competitive algorithms and proposedmethod on a ldquoWuhan Universityrdquo QB image shown inFigure 7 Correspondingly we measured the recall and pre-cision of each method and listed their values in Table 1
As seen from Table 1 recall of bithreshold and PCAHSImethods is 1 whereas their precision is only 04601 and05645 respectively which shows that bothmethods obtainedoverdetection results The similar results can also be foundin Figures 7(d) and 7(e) Although the HI method achievedmore accurate result (shown in Figure 7(f)) compared tobithreshold and PCAHSI it still produces serious misdetec-tion islands in the final map From the quantitative resultsas shown in Table 1 it is easy to conclude that the proposed
Table 1 Recall and precision of ldquoWuhan Universityrdquo image
Method Bithreshold PCAHSI HI ProposedDR 1 1 07320 09882DP 04601 05645 06741 07890
method can obtain more accurate shadow detection resultsthan the competitors for its shadow probability models
45 Limits By carefully observing the detection results of theproposedmethod on different images (Figures 5(g) 6(g) and7(g)) we can found that the more complex the surface is
10 Mathematical Problems in Engineering
(a) (b)
(c) (d)
Figure 8 Results on images with different surface (a) The first QB image (b) ldquoWuhan Universityrdquo image (c) result on (a) and (d) result on(b)
Table 2 Recall and precision of images with different surface
Image First QB image Wuhan UniversityDR 1 09882DP 08961 07890
the more dissatisfactory the result will be In order to givea quantitative evaluation we compared the results on thefirst QB image and ldquoWuhan Universityrdquo image (see Figure 8)Their values of recall and precision are listed in Table 2
As mentioned in Section 41 the first QB image containsonly three types of land covers while ldquoWuhan Universityrdquoimage consists of six different types Accordingly the recalland precision for the first QB image are 1 and 08961 respec-tively These values for ldquoWuhan Universityrdquo image descendto 09882 and 078901 respectively The main reason is thatit is hard to provide sufficient samples in a complex imageWhenwe scribbled samples pixels belonging to different landcovers may be selected as the training samples Even worsepixels of the same land covers but with different intensity forexample the light buildings and dark buildings may also beselected A possible way to eliminate this limit is to jointly usethe shape of sample land covers And this may be our futurework
5 Conclusions
In this paper we focus on the design of a soft shadowdescription method where both intensity and opacity areemployed to estimate a soft degree for each pixel to measurethe extent of belonging to shadows Based on the softshadow description MRF-based iterative detection methodis proposed to make full use of the interactions betweenneighboring pixels The proposed method is tested on fourpieces ofQuickBird remote sensing imagesThe experimentalresults have demonstrated that the proposed method canobtain more accurate results compared to three competitors
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is supported in part by the National NaturalScience Foundation of China under Grants 41001251 theKey Technology Projects of Henan province of China (no132102210212) the Key Technology Projects of the Edu-cational Department of Henan Province of China (no
Mathematical Problems in Engineering 11
13A520011) and the Excellent Youth Teacher of Henan Edu-cational Department of China (2011)
References
[1] C Jaynes S Webb R M Steele M Brown and W B SealesldquoDynamic shadow removal from front projection displaysrdquo inProceedings of the IEEEConference onVisualization pp 175ndash182October 2001
[2] A M Polidorio F C Flores N N Imai et al ldquoAutomaticshadow segmentation in aerial color imagesrdquo in Proceedings ofthe 16th Brazilian Symposium on Computer Graphics and ImageProcessing (SIBGRAPI rsquo03) pp 270ndash277 October 2003
[3] J Huang W Xie and L Tang ldquoDetection of and compensationfor shadows in colored urban aerial imagesrdquo in Proceedings ofthe 5th World Congress on Intelligent Control and Automation(WCICA rsquo04) vol 4 pp 3098ndash3100 June 2004
[4] MHaijianQQiming and S Xinyi ldquoShadow segmentation andcompensation in high resolution satellite imagesrdquo in Proceed-ings of the IEEE International Geoscience and Remote SensingSymposium pp II1036ndashII1039 Boston Mass USA usa July2008
[5] V Arevalo J Gonzalez and G Ambrosio ldquoShadow detection incolour high-resolution satellite imagesrdquo International Journal ofRemote Sensing vol 29 no 7 pp 1945ndash1963 2008
[6] T Gevers and A W M Smeulders ldquoColor-based object recog-nitionrdquo Pattern Recognition vol 32 no 3 pp 453ndash464 1999
[7] V J D Tsai ldquoA comparative study on shadow compensation ofcolor aerial images in invariant color modelsrdquo IEEE Transac-tions on Geoscience and Remote Sensing vol 44 no 6 pp 1661ndash1671 2006
[8] J Yang Z Zhao and J Yang ldquoA shadow removal methodfor high resolution remote sensing imagerdquo Geomatics andInformation Science of Wuhan University vol 33 no 1 pp 17ndash20 2008
[9] H Liu andTXie ldquoStudy on shadowdetection in high resolutionremote sensing image of PCA and HIS modelrdquo Remote SensingTechnology and Application vol 28 no 1 pp 78ndash84 2013
[10] T-P Wu C-K Tang M S Brown and H-Y Shum ldquoNaturalshadow mattingrdquo ACM Transactions on Graphics vol 26 no 2pp 377ndash388 2007
[11] W Liu and F Yamazaki ldquoObject-based shadow extraction andcorrection of high-resolution optical satellite imagesrdquo IEEEJournal of Selected Topics in Applied Earth Observations andRemote Sensing vol 5 no 4 pp 1296ndash1302 2012
[12] J Besag ldquoStatistical analysis of nonlattice datardquoThe Statisticianvol 24 no 3 pp 179ndash195 1975
[13] J Liu T Fang and D Li ldquoShadow detection in remotelysensed images based on self-adaptive feature selectionrdquo IEEETransactions on Geoscience and Remote Sensing vol 49 no 12pp 5092ndash5103 2011
[14] A Levin D Lischinski and YWeiss ldquoA closed-form solution tonatural image mattingrdquo IEEE Transactions on Pattern Analysisand Machine Intelligence vol 30 no 2 pp 228ndash242 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 9
(a) (b) (c)
(d) (e) (f)
(g)
Figure 7 Results on ldquoWuhan Universityrdquo image (a) The QB image (b) sample image (c) the ground truth (d) bithreshold (e) PCAHSI (f)HI and (g) proposed method
We applied all competitive algorithms and proposedmethod on a ldquoWuhan Universityrdquo QB image shown inFigure 7 Correspondingly we measured the recall and pre-cision of each method and listed their values in Table 1
As seen from Table 1 recall of bithreshold and PCAHSImethods is 1 whereas their precision is only 04601 and05645 respectively which shows that bothmethods obtainedoverdetection results The similar results can also be foundin Figures 7(d) and 7(e) Although the HI method achievedmore accurate result (shown in Figure 7(f)) compared tobithreshold and PCAHSI it still produces serious misdetec-tion islands in the final map From the quantitative resultsas shown in Table 1 it is easy to conclude that the proposed
Table 1 Recall and precision of ldquoWuhan Universityrdquo image
Method Bithreshold PCAHSI HI ProposedDR 1 1 07320 09882DP 04601 05645 06741 07890
method can obtain more accurate shadow detection resultsthan the competitors for its shadow probability models
45 Limits By carefully observing the detection results of theproposedmethod on different images (Figures 5(g) 6(g) and7(g)) we can found that the more complex the surface is
10 Mathematical Problems in Engineering
(a) (b)
(c) (d)
Figure 8 Results on images with different surface (a) The first QB image (b) ldquoWuhan Universityrdquo image (c) result on (a) and (d) result on(b)
Table 2 Recall and precision of images with different surface
Image First QB image Wuhan UniversityDR 1 09882DP 08961 07890
the more dissatisfactory the result will be In order to givea quantitative evaluation we compared the results on thefirst QB image and ldquoWuhan Universityrdquo image (see Figure 8)Their values of recall and precision are listed in Table 2
As mentioned in Section 41 the first QB image containsonly three types of land covers while ldquoWuhan Universityrdquoimage consists of six different types Accordingly the recalland precision for the first QB image are 1 and 08961 respec-tively These values for ldquoWuhan Universityrdquo image descendto 09882 and 078901 respectively The main reason is thatit is hard to provide sufficient samples in a complex imageWhenwe scribbled samples pixels belonging to different landcovers may be selected as the training samples Even worsepixels of the same land covers but with different intensity forexample the light buildings and dark buildings may also beselected A possible way to eliminate this limit is to jointly usethe shape of sample land covers And this may be our futurework
5 Conclusions
In this paper we focus on the design of a soft shadowdescription method where both intensity and opacity areemployed to estimate a soft degree for each pixel to measurethe extent of belonging to shadows Based on the softshadow description MRF-based iterative detection methodis proposed to make full use of the interactions betweenneighboring pixels The proposed method is tested on fourpieces ofQuickBird remote sensing imagesThe experimentalresults have demonstrated that the proposed method canobtain more accurate results compared to three competitors
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is supported in part by the National NaturalScience Foundation of China under Grants 41001251 theKey Technology Projects of Henan province of China (no132102210212) the Key Technology Projects of the Edu-cational Department of Henan Province of China (no
Mathematical Problems in Engineering 11
13A520011) and the Excellent Youth Teacher of Henan Edu-cational Department of China (2011)
References
[1] C Jaynes S Webb R M Steele M Brown and W B SealesldquoDynamic shadow removal from front projection displaysrdquo inProceedings of the IEEEConference onVisualization pp 175ndash182October 2001
[2] A M Polidorio F C Flores N N Imai et al ldquoAutomaticshadow segmentation in aerial color imagesrdquo in Proceedings ofthe 16th Brazilian Symposium on Computer Graphics and ImageProcessing (SIBGRAPI rsquo03) pp 270ndash277 October 2003
[3] J Huang W Xie and L Tang ldquoDetection of and compensationfor shadows in colored urban aerial imagesrdquo in Proceedings ofthe 5th World Congress on Intelligent Control and Automation(WCICA rsquo04) vol 4 pp 3098ndash3100 June 2004
[4] MHaijianQQiming and S Xinyi ldquoShadow segmentation andcompensation in high resolution satellite imagesrdquo in Proceed-ings of the IEEE International Geoscience and Remote SensingSymposium pp II1036ndashII1039 Boston Mass USA usa July2008
[5] V Arevalo J Gonzalez and G Ambrosio ldquoShadow detection incolour high-resolution satellite imagesrdquo International Journal ofRemote Sensing vol 29 no 7 pp 1945ndash1963 2008
[6] T Gevers and A W M Smeulders ldquoColor-based object recog-nitionrdquo Pattern Recognition vol 32 no 3 pp 453ndash464 1999
[7] V J D Tsai ldquoA comparative study on shadow compensation ofcolor aerial images in invariant color modelsrdquo IEEE Transac-tions on Geoscience and Remote Sensing vol 44 no 6 pp 1661ndash1671 2006
[8] J Yang Z Zhao and J Yang ldquoA shadow removal methodfor high resolution remote sensing imagerdquo Geomatics andInformation Science of Wuhan University vol 33 no 1 pp 17ndash20 2008
[9] H Liu andTXie ldquoStudy on shadowdetection in high resolutionremote sensing image of PCA and HIS modelrdquo Remote SensingTechnology and Application vol 28 no 1 pp 78ndash84 2013
[10] T-P Wu C-K Tang M S Brown and H-Y Shum ldquoNaturalshadow mattingrdquo ACM Transactions on Graphics vol 26 no 2pp 377ndash388 2007
[11] W Liu and F Yamazaki ldquoObject-based shadow extraction andcorrection of high-resolution optical satellite imagesrdquo IEEEJournal of Selected Topics in Applied Earth Observations andRemote Sensing vol 5 no 4 pp 1296ndash1302 2012
[12] J Besag ldquoStatistical analysis of nonlattice datardquoThe Statisticianvol 24 no 3 pp 179ndash195 1975
[13] J Liu T Fang and D Li ldquoShadow detection in remotelysensed images based on self-adaptive feature selectionrdquo IEEETransactions on Geoscience and Remote Sensing vol 49 no 12pp 5092ndash5103 2011
[14] A Levin D Lischinski and YWeiss ldquoA closed-form solution tonatural image mattingrdquo IEEE Transactions on Pattern Analysisand Machine Intelligence vol 30 no 2 pp 228ndash242 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

10 Mathematical Problems in Engineering
(a) (b)
(c) (d)
Figure 8 Results on images with different surface (a) The first QB image (b) ldquoWuhan Universityrdquo image (c) result on (a) and (d) result on(b)
Table 2 Recall and precision of images with different surface
Image First QB image Wuhan UniversityDR 1 09882DP 08961 07890
the more dissatisfactory the result will be In order to givea quantitative evaluation we compared the results on thefirst QB image and ldquoWuhan Universityrdquo image (see Figure 8)Their values of recall and precision are listed in Table 2
As mentioned in Section 41 the first QB image containsonly three types of land covers while ldquoWuhan Universityrdquoimage consists of six different types Accordingly the recalland precision for the first QB image are 1 and 08961 respec-tively These values for ldquoWuhan Universityrdquo image descendto 09882 and 078901 respectively The main reason is thatit is hard to provide sufficient samples in a complex imageWhenwe scribbled samples pixels belonging to different landcovers may be selected as the training samples Even worsepixels of the same land covers but with different intensity forexample the light buildings and dark buildings may also beselected A possible way to eliminate this limit is to jointly usethe shape of sample land covers And this may be our futurework
5 Conclusions
In this paper we focus on the design of a soft shadowdescription method where both intensity and opacity areemployed to estimate a soft degree for each pixel to measurethe extent of belonging to shadows Based on the softshadow description MRF-based iterative detection methodis proposed to make full use of the interactions betweenneighboring pixels The proposed method is tested on fourpieces ofQuickBird remote sensing imagesThe experimentalresults have demonstrated that the proposed method canobtain more accurate results compared to three competitors
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
Acknowledgments
This work is supported in part by the National NaturalScience Foundation of China under Grants 41001251 theKey Technology Projects of Henan province of China (no132102210212) the Key Technology Projects of the Edu-cational Department of Henan Province of China (no
Mathematical Problems in Engineering 11
13A520011) and the Excellent Youth Teacher of Henan Edu-cational Department of China (2011)
References
[1] C Jaynes S Webb R M Steele M Brown and W B SealesldquoDynamic shadow removal from front projection displaysrdquo inProceedings of the IEEEConference onVisualization pp 175ndash182October 2001
[2] A M Polidorio F C Flores N N Imai et al ldquoAutomaticshadow segmentation in aerial color imagesrdquo in Proceedings ofthe 16th Brazilian Symposium on Computer Graphics and ImageProcessing (SIBGRAPI rsquo03) pp 270ndash277 October 2003
[3] J Huang W Xie and L Tang ldquoDetection of and compensationfor shadows in colored urban aerial imagesrdquo in Proceedings ofthe 5th World Congress on Intelligent Control and Automation(WCICA rsquo04) vol 4 pp 3098ndash3100 June 2004
[4] MHaijianQQiming and S Xinyi ldquoShadow segmentation andcompensation in high resolution satellite imagesrdquo in Proceed-ings of the IEEE International Geoscience and Remote SensingSymposium pp II1036ndashII1039 Boston Mass USA usa July2008
[5] V Arevalo J Gonzalez and G Ambrosio ldquoShadow detection incolour high-resolution satellite imagesrdquo International Journal ofRemote Sensing vol 29 no 7 pp 1945ndash1963 2008
[6] T Gevers and A W M Smeulders ldquoColor-based object recog-nitionrdquo Pattern Recognition vol 32 no 3 pp 453ndash464 1999
[7] V J D Tsai ldquoA comparative study on shadow compensation ofcolor aerial images in invariant color modelsrdquo IEEE Transac-tions on Geoscience and Remote Sensing vol 44 no 6 pp 1661ndash1671 2006
[8] J Yang Z Zhao and J Yang ldquoA shadow removal methodfor high resolution remote sensing imagerdquo Geomatics andInformation Science of Wuhan University vol 33 no 1 pp 17ndash20 2008
[9] H Liu andTXie ldquoStudy on shadowdetection in high resolutionremote sensing image of PCA and HIS modelrdquo Remote SensingTechnology and Application vol 28 no 1 pp 78ndash84 2013
[10] T-P Wu C-K Tang M S Brown and H-Y Shum ldquoNaturalshadow mattingrdquo ACM Transactions on Graphics vol 26 no 2pp 377ndash388 2007
[11] W Liu and F Yamazaki ldquoObject-based shadow extraction andcorrection of high-resolution optical satellite imagesrdquo IEEEJournal of Selected Topics in Applied Earth Observations andRemote Sensing vol 5 no 4 pp 1296ndash1302 2012
[12] J Besag ldquoStatistical analysis of nonlattice datardquoThe Statisticianvol 24 no 3 pp 179ndash195 1975
[13] J Liu T Fang and D Li ldquoShadow detection in remotelysensed images based on self-adaptive feature selectionrdquo IEEETransactions on Geoscience and Remote Sensing vol 49 no 12pp 5092ndash5103 2011
[14] A Levin D Lischinski and YWeiss ldquoA closed-form solution tonatural image mattingrdquo IEEE Transactions on Pattern Analysisand Machine Intelligence vol 30 no 2 pp 228ndash242 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 11
13A520011) and the Excellent Youth Teacher of Henan Edu-cational Department of China (2011)
References
[1] C Jaynes S Webb R M Steele M Brown and W B SealesldquoDynamic shadow removal from front projection displaysrdquo inProceedings of the IEEEConference onVisualization pp 175ndash182October 2001
[2] A M Polidorio F C Flores N N Imai et al ldquoAutomaticshadow segmentation in aerial color imagesrdquo in Proceedings ofthe 16th Brazilian Symposium on Computer Graphics and ImageProcessing (SIBGRAPI rsquo03) pp 270ndash277 October 2003
[3] J Huang W Xie and L Tang ldquoDetection of and compensationfor shadows in colored urban aerial imagesrdquo in Proceedings ofthe 5th World Congress on Intelligent Control and Automation(WCICA rsquo04) vol 4 pp 3098ndash3100 June 2004
[4] MHaijianQQiming and S Xinyi ldquoShadow segmentation andcompensation in high resolution satellite imagesrdquo in Proceed-ings of the IEEE International Geoscience and Remote SensingSymposium pp II1036ndashII1039 Boston Mass USA usa July2008
[5] V Arevalo J Gonzalez and G Ambrosio ldquoShadow detection incolour high-resolution satellite imagesrdquo International Journal ofRemote Sensing vol 29 no 7 pp 1945ndash1963 2008
[6] T Gevers and A W M Smeulders ldquoColor-based object recog-nitionrdquo Pattern Recognition vol 32 no 3 pp 453ndash464 1999
[7] V J D Tsai ldquoA comparative study on shadow compensation ofcolor aerial images in invariant color modelsrdquo IEEE Transac-tions on Geoscience and Remote Sensing vol 44 no 6 pp 1661ndash1671 2006
[8] J Yang Z Zhao and J Yang ldquoA shadow removal methodfor high resolution remote sensing imagerdquo Geomatics andInformation Science of Wuhan University vol 33 no 1 pp 17ndash20 2008
[9] H Liu andTXie ldquoStudy on shadowdetection in high resolutionremote sensing image of PCA and HIS modelrdquo Remote SensingTechnology and Application vol 28 no 1 pp 78ndash84 2013
[10] T-P Wu C-K Tang M S Brown and H-Y Shum ldquoNaturalshadow mattingrdquo ACM Transactions on Graphics vol 26 no 2pp 377ndash388 2007
[11] W Liu and F Yamazaki ldquoObject-based shadow extraction andcorrection of high-resolution optical satellite imagesrdquo IEEEJournal of Selected Topics in Applied Earth Observations andRemote Sensing vol 5 no 4 pp 1296ndash1302 2012
[12] J Besag ldquoStatistical analysis of nonlattice datardquoThe Statisticianvol 24 no 3 pp 179ndash195 1975
[13] J Liu T Fang and D Li ldquoShadow detection in remotelysensed images based on self-adaptive feature selectionrdquo IEEETransactions on Geoscience and Remote Sensing vol 49 no 12pp 5092ndash5103 2011
[14] A Levin D Lischinski and YWeiss ldquoA closed-form solution tonatural image mattingrdquo IEEE Transactions on Pattern Analysisand Machine Intelligence vol 30 no 2 pp 228ndash242 2008
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of





![A Geometry-based Soft Shadow Volume Algorithm using ... › ~cs5610 › handouts › soft Penumbra...shadow mapping [Williams 1978] and shadow volumes [Crow 1977] are probably the](https://img.pdfslide.net/doc/110x75/5f1eb4bd28ffc52f770722eb/a-geometry-based-soft-shadow-volume-algorithm-using-a-cs5610-a-handouts.jpg)