Embed Size (px)
Citation preview

Research ArticleChaotic Tolerant Synchronization Analysis withPropagation Delay and Actuator Faults
Zhang Qunli
Department of Mathematics, Heze University, Heze, Shandong 274015, China
Correspondence should be addressed to Zhang Qunli; [email protected]
Received 20 June 2015; Accepted 24 August 2015
Academic Editor: Laura Gardini
Copyright © 2015 Zhang Qunli. This is an open access article distributed under the Creative Commons Attribution License, whichpermits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
The criteria for tolerant synchronizationwith a constant propagation delay and actuator faults are presented by usingmatrix analysistechniques. A new algorithm, which constructs the extended error systems in order to make the conservation of the stability lower,is proposed. Based on proper Lyapunov-Krasovskii functional, the novel delay-dependent fault tolerant synchronization analysesare derived. Finally, numerical examples show the effectiveness of the proposed method.
1. Introduction
The realization of OGY (Ott-Grebogi-Yorker) chaos-controlmethod [1] and PC (Pecora and Carroll) synchronizationmethod [2] has been attracting researchers’ attention sincethe 1990s. Chaos synchronization [3–13] is of great practicalsignificance and has aroused great interest in recent years.
They all focused on the design of synchronization undernormal operating conditions in the above works described.But, in practical chaotic secure communication systems,sensors, actuators, and inner components may inevitablyfail, which can lead to sharp performance decline of chaoticsecure. For the reason, fault tolerant synchronization andcontrol [14–20] of chaotic systems have been the hot topic ofintensive researches recently.
More recent works studied the fault tolerant synchro-nization and control, but they were limited to constructLyapunov-Krasovskii functional
𝑉 (𝑡) = 𝑉1(𝑒 (𝑡)) + 𝑉
2(𝑓 (𝑡)) , (1)
which separates 𝑒(𝑡) and 𝑓(𝑡), where 𝑒(𝑡) is the synchroniza-tion error and 𝑓(𝑡) is the error of fault function. Motivatingthe limitation and the extended transformation [21, 22],
the effective new method, which does the extended transfor-mation for the error system, to consider Lyapunov-Krasovskiifunctional
𝑉 (𝑡) = 𝑉 ((𝑒𝑇(𝑡) , 𝑓𝑇(𝑡))𝑇
) , (2)
which do not separate 𝑒(𝑡) and 𝑓(𝑡), for the chaotic faulttolerant synchronization with a constant propagation delayand actuator faults, makes the conservation descent. Finally,numerical examples are given to verify the above method.
Notations. In this paper, 𝑅, 𝑅𝑛, and 𝑅𝑛×𝑚 denote, respectively,the real number, the real 𝑛-vectors, and the real 𝑛×𝑚matrices.The superscript “𝑇” stands for the transpose of a matrix. Thesymbol 𝑋 > 𝑌 (𝑋 ≥ 𝑌), where𝑋 and𝑌 are symmetricmatri-ces, means that 𝑋-𝑌 is positive definite (positive semidefi-nite). 𝐼 is the identity matrix of appropriate dimensions. “∗”denotes the matrix entries implied by symmetry.
2. Preliminaries and Systems Description
Consider a chaotic master system with the actuator faultsitem 𝑓(𝑡) in the following form:
�� (𝑡) = 𝐴𝑥 (𝑡) + 𝑔 (𝑥 (𝑡)) + ℎ (𝑥 (𝑡 − 𝜃)) + 𝐸𝑓 (𝑡) ,
𝑦 (𝑡) = 𝐶𝑥 (𝑡) + 𝐷𝑓 (𝑡) ,
(3)
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2015, Article ID 785861, 14 pageshttp://dx.doi.org/10.1155/2015/785861

2 Mathematical Problems in Engineering
where 𝑥(𝑡) ∈ 𝑅𝑛 is the measurable state vector. 𝑦(𝑡) ∈ 𝑅𝑝 isthe output vector, and 𝐴,𝐶,𝐷, and 𝐸 are proper dimensionconstant matrices. 𝑔(𝑥(𝑡)), ℎ(𝑥(𝑡 − 𝜃)) are known continuousnonlinear functions. 𝜃 > 0 is the delay.
Assumption 1. There exist the matrices 𝑈1, 𝑈2,𝑀1,𝑀2,
𝑊1,𝑊2, 𝑉1, 𝑉2∈ 𝑅𝑛×𝑛, and the nonlinear functions 𝑔(⋅), and
ℎ(⋅) satisfy
(𝑈1(𝑔 (𝑥) − 𝑔 (𝑦)) − 𝑈
2(𝑥 − 𝑦))
𝑇
⋅ (𝑀1(𝑔 (𝑥) − 𝑔 (𝑦)) −𝑀
2(𝑥 − 𝑦)) ≤ 0,
(4)
(𝑊1(ℎ (𝑥) − ℎ (𝑦)) − 𝑊
2(𝑥 − 𝑦))
𝑇
⋅ (𝑉1(ℎ (𝑥) − ℎ (𝑦)) − 𝑉
2(𝑥 − 𝑦)) ≤ 0
(5)
for all 𝑥, 𝑦 ∈ 𝑅𝑛.The slave system linked with the chaotic master system
(3) is described by
𝑥 (𝑡) = 𝐴𝑥 (𝑡) + 𝑔 (𝑥 (𝑡)) + ℎ (𝑥 (𝑡 − 𝜃)) + 𝐸𝑓
− 𝐿 (𝑦 (𝑡 − 𝜏) − 𝑦 (𝑡 − 𝜏)) ,
𝑦 (𝑡) = 𝐶𝑥 (𝑡) + 𝐷𝑓 (𝑡) ,
(6)
where 𝑥(𝑡) ∈ 𝑅𝑛 is the measurable state vector and 𝜏 > 0 is aconstant propagation delay.
Let 𝑒(𝑡) = 𝑥(𝑡) − 𝑥(𝑡), 𝑓(𝑡) = 𝑓(𝑡) − 𝑓(𝑡), and 𝜑(𝑡) =𝑦(𝑡) − 𝑦(𝑡) = 𝐶𝑒(𝑡) + 𝐷𝑓(𝑡), and then
𝑒 (𝑡) = 𝐴𝑒 (𝑡) + 𝑔 (𝑥 (𝑡)) − 𝑔 (𝑥 (𝑡)) + ℎ (𝑥 (𝑡 − 𝜃))
− ℎ (𝑥 (𝑡 − 𝜃)) + 𝐸𝑓 (𝑡) − 𝐿𝐶𝑒 (𝑡 − 𝜏)
− 𝐿𝐷𝑓 (𝑡 − 𝜏) ,
𝜑 (𝑡) = 𝐶𝑒 (𝑡) + 𝐷𝑓 (𝑡) .
(7)
Lemma 2 (see [23, 24]). For any constant matrix𝑊 ∈ 𝑅𝑛×𝑛,𝑊 > 0, scalar 0 < ℎ(𝑡) < ℎ, and vector function 𝑤(𝑡) :[0, ℎ] → 𝑅
𝑛 such that the integrations concerned are welldefined, and then
(∫
ℎ(𝑡)
0
𝑤 (𝑠) 𝑑𝑠)
𝑇
𝑊(∫
ℎ(𝑡)
0
𝑤 (𝑠) 𝑑𝑠)
≤ ℎ (𝑡) ∫
ℎ(𝑡)
0
𝑤𝑇(𝑠)𝑊𝑤 (𝑠) 𝑑𝑠.
(8)
Lemma 3 (see [25]). Let 𝑄 > 0, 𝐻,𝐹(𝑡), and 𝐸 be real matri-ces of appropriate dimensions, with 𝐹(𝑡) satisfying 𝐹𝑇(𝑡)𝐹(𝑡) ≤𝐼. Then, the following inequalities are equivalent:
(1) 𝑄 +𝐻𝐹(𝑡)𝐸 + 𝐸𝑇𝐹𝑇(𝑡)𝐻𝑇 < 0;(2) there exists a scalar 𝜀 > 0 such that 𝑄 + 𝜀−1𝐻𝐻𝑇 +𝜀𝐸𝑇𝐸 < 0.
Lemma 4 (see [26–28]). Let𝐴, 𝐿, 𝐸, and 𝐹(𝑡) be real matricesof appropriate dimensions, with 𝐹(𝑡) satisfying 𝐹𝑇(𝑡)𝐹(𝑡) ≤ 𝐼.Then, one has the following:
(1) for any scalar 𝜀 > 0,
𝐿𝐹𝐸 + 𝐸𝑇𝐹𝑇𝐿𝑇< 𝜀−1𝐿𝐿𝑇+ 𝜀𝐸𝑇𝐸; (9)
(2) for any matrix 𝑃 > 0 and scalar 𝜀 > 0, such that 𝜀𝐼 −𝐸𝐹𝐸𝑇> 0,
(𝐴 + 𝐿𝐹𝐸)𝑇𝑃 (𝐴 + 𝐿𝐹𝐸)
≤ 𝐴𝑇𝑃𝐴 + 𝐴
𝑇𝑃𝐸 (𝜀𝐼 − 𝐸
𝑇𝑃𝐸)−1
𝐸𝑇𝑃𝐴 + 𝜀𝐿
𝑇𝐿.
(10)
3. Fault Tolerant Synchronization Analysis
3.1. Fault Tolerant Synchronization Analysis When 𝑓(𝑡) and𝑓(𝑡) Are Derivable on 𝑡. Let 𝑓(𝑡) = −𝐺𝜀(𝑡) = −𝐺𝐶𝑒(𝑡) −𝐺𝐷𝑓(𝑡), and we have
𝑒 (𝑡) = 𝐴𝑒 (𝑡) + 𝑔 (𝑥 (𝑡)) − 𝑔 (𝑥 (𝑡)) + ℎ (𝑥 (𝑡 − 𝜃))
− ℎ (𝑥 (𝑡 − 𝜃)) + 𝐸𝑓 (𝑡) − 𝐿𝐶𝑒 (𝑡) + 𝐿𝐶𝑒 (𝑡)
− 𝐿𝐶𝑒 (𝑡 − 𝜏) − 𝐿𝐷𝑓 (𝑡) + 𝐿𝐷𝑓 (𝑡)
− 𝐿𝐷𝑓 (𝑡 − 𝜏)
= (𝐴 − 𝐿𝐶) 𝑒 (𝑡) + 𝑔 (𝑥 (𝑡)) − 𝑔 (𝑥 (𝑡))
+ ℎ (𝑥 (𝑡 − 𝜃)) − ℎ (𝑥 (𝑡 − 𝜃)) + (𝐸 − 𝐿𝐷)𝑓 (𝑡)
+ 𝐿𝐶∫
𝑡
𝑡−𝜏
𝑒 (𝑠) 𝑑𝑠 + 𝐿𝐷∫
𝑡
𝑡−𝜏
𝑓 (𝑠) 𝑑𝑠.
(11)
Suppose 𝜂(𝑡) = ( 𝑒(𝑡)𝑓(𝑡)), and then
𝑒 (𝑡) = (𝐴 − 𝐿𝐶, 𝐸 − 𝐿𝐷)(
𝑒 (𝑡)
𝑓 (𝑡)
) + 𝑔 (𝑥 (𝑡))
− 𝑔 (𝑥 (𝑡)) + ℎ (𝑥 (𝑡 − 𝜃)) − ℎ (𝑥 (𝑡 − 𝜃))
+ (𝐿𝐶, 𝐿𝐷)(
∫
𝑡
𝑡−𝜏
𝑒 (𝑠) 𝑑𝑠
∫
𝑡
𝑡−𝜏
𝑓 (𝑠) 𝑑𝑠
)
= (𝐴 − 𝐿𝐶, 𝐸 − 𝐿𝐷) 𝜂 (𝑡) + 𝑔 (𝑥 (𝑡))
− 𝑔 (𝑥 (𝑡)) + (𝐿𝐶, 𝐿𝐷)∫
𝑡
𝑡−𝜏
𝜂 (𝑠) 𝑑𝑠,
𝑓 (𝑡) = (−𝐺𝐶, −𝐺𝐷)(
𝑒 (𝑡)
𝑓 (𝑡)
) = (−𝐺𝐶, −𝐺𝐷) 𝜂 (𝑡) ,

Mathematical Problems in Engineering 3
𝜂 (𝑡) = (
𝐴 − 𝐿𝐶 𝐸 − 𝐿𝐷
−𝐺𝐶 −𝐺𝐷)𝜂 (𝑡)
+ (
𝑔 (𝑥 (𝑡)) − 𝑔 (𝑥 (𝑡))
0)
+ (
ℎ (𝑥 (𝑡 − 𝜃)) − ℎ (𝑥 (𝑡 − 𝜃))
0)
+ (
𝐿𝐶 𝐿𝐷
0 0)∫
𝑡
𝑡−𝜏
𝜂 (𝑠) 𝑑𝑠,
𝜂 (𝑡) = 𝐵𝜂 (𝑡) + (
𝑝 (𝑡)
0) + (
𝑞 (𝑡)
0) + 𝑅∫
𝑡
𝑡−𝜏
𝜂 (𝑠) 𝑑𝑠,
(12)
where
𝐵 = (
𝐴 − 𝐿𝐶 𝐸 − 𝐿𝐷
−𝐺𝐶 −𝐺𝐷) ,
𝑝 (𝑡) = 𝑔 (𝑥 (𝑡)) − 𝑔 (𝑥 (𝑡)) ,
𝑞 (𝑡) = ℎ (𝑥 (𝑡 − 𝜃)) − ℎ (𝑥 (𝑡 − 𝜃)) ,
𝑅 = (
𝐿𝐶 𝐿𝐷
0 0) .
(13)
From the assumption, we have
(𝑔 (𝑥) − 𝑔 (𝑦))𝑇
𝑈𝑇
1𝑀1(𝑔 (𝑥) − 𝑔 (𝑦))
− (𝑔 (𝑥) − 𝑔 (𝑦))𝑇
𝑈𝑇
1𝑀2(𝑥 − 𝑦)
− (𝑥 − 𝑦)𝑇
𝑈𝑇
2𝑀1(𝑔 (𝑥) − 𝑔 (𝑦))
+ (𝑥 − 𝑦)𝑇
𝑈𝑇
2𝑀2(𝑥 − 𝑦) ≤ 0.
(14)
So, we can get from assumption that
(𝑝 (𝑡))𝑇
𝑈𝑇
1𝑀1𝑝 (𝑡) − (𝑝 (𝑡))
𝑇
𝑈𝑇
1𝑀2𝑒 (𝑡)
− (𝑒 (𝑡))𝑇𝑈𝑇
2𝑀1𝑝 (𝑡) + (𝑒 (𝑡))
𝑇𝑈𝑇
2𝑀2𝑒 (𝑡) ≤ 0,
(𝑒𝑇(𝑡) 𝑓
𝑇(𝑡))(
−𝑈𝑇
2𝑀20
0 0
)(
𝑒 (𝑡)
𝑓 (𝑡)
)
+ (𝑒𝑇(𝑡) 𝑓
𝑇(𝑡))(
𝑈𝑇
2𝑀1𝑅1
0 𝑅2
)(
𝑝 (𝑡)
0)
+ (𝑝𝑇(𝑡) 0)(
𝑈𝑇
1𝑀20
𝑅3𝑅4
)(
𝑒 (𝑡)
𝑓 (𝑡)
)
+ (𝑝𝑇(𝑡) 0)(
−𝑈𝑇
1𝑀1𝑅5
𝑅6
𝑅7
)(
𝑝 (𝑡)
0) ≥ 0,
(15)
in which the proper dimension matrices 𝑅𝑖∈ 𝑅𝑛×𝑛, 𝑖 =
1, 2, . . . , 7, are arbitrary.
That is,
𝜂𝑇(𝑡) (−𝑈𝑇
2𝑀20
0 0
) 𝜂 (𝑡)
+ 𝜂𝑇(𝑡) (𝑈𝑇
2𝑀1𝑅1
0 𝑅2
)(
𝑝 (𝑡)
0)
+ (
𝑝 (𝑡)
0)
𝑇
(𝑈𝑇
1𝑀20
𝑅3𝑅4
)𝜂 (𝑡)
+ (
𝑝 (𝑡)
0)
𝑇
(−𝑈𝑇
1𝑀1𝑅5
𝑅6
𝑅7
)(
𝑝 (𝑡)
0) ≥ 0,
𝜂𝑇(𝑡) (1
2(𝑆1+ 𝑆𝑇
1)) 𝜂 (𝑡)
+ 𝜂𝑇(𝑡) (1
2(𝑆2+ 𝑆𝑇
3))(
𝑝 (𝑡)
0)
+ (
𝑝 (𝑡)
0)
𝑇
(1
2(𝑆3+ 𝑆𝑇
2)) 𝜂 (𝑡)
+ (
𝑝 (𝑡)
0)
𝑇
(1
2(𝑆4+ 𝑆𝑇
4))(
𝑝 (𝑡)
0) ≥ 0,
(16)
where
𝑆1= (−𝜀𝑈𝑇
2𝑀20
0 0
) ,
𝑆2= (𝜀𝑈𝑇
2𝑀1𝜀𝑅1
0 𝜀𝑅2
) ,
𝑆3= (𝜀𝑈𝑇
1𝑀20
𝜀𝑅3𝜀𝑅4
) ,
𝑆4= (−𝜀𝑈𝑇
1𝑀1𝜀𝑅5
𝜀𝑅6
𝜀𝑅7
) ,
𝜀 > 0
(17)
is any constant. Consider
𝜂𝑇(𝑡) (𝑆1+ 𝑆𝑇
1) 𝜂 (𝑡) + 𝜂
𝑇(𝑡) (𝑆2+ 𝑆𝑇
3)(
𝑝 (𝑡)
0)
+ (
𝑝 (𝑡)
0)
𝑇
(𝑆3+ 𝑆𝑇
2) 𝜂 (𝑡)
+ (
𝑝 (𝑡)
0)
𝑇
(𝑆4+ 𝑆𝑇
4)(
𝑝 (𝑡)
0) ≥ 0,
𝜉𝑇(𝑡) Λ1𝜉 (𝑡) ≥ 0,
(18)

4 Mathematical Problems in Engineering
where
𝜉 (𝑡) = (𝜂𝑇(𝑡) 𝜂𝑇(𝑡) (𝑝
𝑇(𝑡) 0) (𝑞
𝑇(𝑡) 0) ∫
𝑡
𝑡−𝜏
𝜂𝑇(𝑠) 𝑑𝑠 ∫
𝑡
𝑡−𝜃
𝜂𝑇(𝑠) 𝑑𝑠)
𝑇
,
Λ1=
(((((
(
𝑆1+ 𝑆𝑇
10 0 𝑆
2+ 𝑆𝑇
30 0
∗ 0 0 0 0 0
∗ ∗ 𝑆4+ 𝑆𝑇
40 0 0
∗ ∗ ∗ 0 0 0
∗ ∗ ∗ ∗ 0 0
∗ ∗ ∗ ∗ ∗ 0
)))))
)
.
(19)
Imitating the above inference, we obtain from inequality (5)the following:
𝜉𝑇(𝑡) Λ2𝜉 (𝑡) ≥ 0, (20)
where
Λ2= 𝛿
(((((
(
𝑌𝑇
1Δ𝑌10 0 𝑌
𝑇
1Δ𝑌30 𝑌𝑇
1Δ𝑌2
∗ 0 0 0 0 0
∗ ∗ 0 0 0 0
∗ ∗ ∗ 𝑌𝑇
3Δ𝑌30 𝑌𝑇
3Δ𝑌2
∗ ∗ ∗ ∗ 0 0
∗ ∗ ∗ ∗ ∗ 𝑌𝑇
2Δ𝑌2
)))))
)
,
𝛿 > 0,
𝑌1= (
𝐼 0
0 0) ,
𝑌2= (
−𝐼 0
0 0) ,
𝑌3= (
0 0
𝐼 𝑅8
) ,
Δ = (
−𝑊𝑇
2𝑉2− 𝑉𝑇
2𝑊2𝑊𝑇
2𝑉1+ 𝑉𝑇
2𝑊1
∗ −𝑊𝑇
1𝑉1− 𝑉𝑇
1𝑊1
) .
(21)
We choose Lyapunov-Krasovskii functional
𝑉 (𝑡) = 𝜂𝑇(𝑡) 𝑃𝜂 (𝑡) + ∫
0
−𝜏
∫
𝑡
𝑡+𝑟
𝜂𝑇(𝑠) 𝑄 𝜂 (𝑠) 𝑑𝑠 𝑑𝑟
+ ∫
0
−𝜃
∫
𝑡
𝑡+𝑟
𝜂𝑇(𝑠) Θ 𝜂 (𝑠) 𝑑𝑠 𝑑𝑟.
(22)
Differentiating 𝑉(𝑡) with respect to 𝑡, the following result isyielded:
�� (𝑡) = 2𝜂𝑇(𝑡) 𝑃 𝜂 (𝑡) + 𝜏 𝜂
𝑇(𝑡) 𝑄 𝜂 (𝑡)
− ∫
𝑡
𝑡−𝜏
𝜂𝑇(𝑠) 𝑄 𝜂 (𝑠) 𝑑𝑠
= 2𝜂𝑇(𝑡) 𝑃𝐵𝜂 (𝑡) + 2𝜂
𝑇(𝑡) 𝑃(
𝑝 (𝑡)
0)
+ 2𝜂𝑇(𝑡) 𝑃𝑅∫
𝑡
𝑡−𝜏
𝜂 (𝑠) 𝑑𝑠 + 𝜏 𝜂𝑇(𝑡) 𝑄 𝜂 (𝑡)
− ∫
𝑡
𝑡−𝜏
𝜂𝑇(𝑠) 𝑄 𝜂 (𝑠) 𝑑𝑠 + 𝜃 𝜂
𝑇(𝑡) Θ 𝜂 (𝑡)
− ∫
𝑡
𝑡−𝜃
𝜂𝑇(𝑠) Θ 𝜂 (𝑠) 𝑑𝑠.
(23)
From Lemma 2, we have
�� (𝑡) ≤ 𝜂𝑇(𝑡) (𝑃𝐵 + 𝐵
𝑇𝑃) 𝜂 (𝑡) + 2𝜂
𝑇(𝑡) 𝑃(
𝑝 (𝑡)
0)
+ 2𝜂𝑇(𝑡) 𝑃(
𝑞 (𝑡)
0) + 2𝜂
𝑇(𝑡) 𝑃𝑅∫
𝑡
𝑡−𝜏
𝜂 (𝑠) 𝑑𝑠
+ 𝜏 𝜂𝑇(𝑡) 𝑄 𝜂 (𝑡)
−1
𝜏(∫
𝑡
𝑡−𝜏
𝜂 (𝑠) 𝑑𝑠)
𝑇
𝑄(∫
𝑡
𝑡−𝜏
𝜂 (𝑠) 𝑑𝑠)
+ 𝜃 𝜂𝑇(𝑡) Θ 𝜂 (𝑡)
−1
𝜃(∫
𝑡
𝑡−𝜏
𝜂 (𝑠) 𝑑𝑠)
𝑇
Θ(∫
𝑡
𝑡−𝜏
𝜂 (𝑠) 𝑑𝑠)
= 𝜉𝑇(𝑡) Π𝜉 (𝑡) ≥ 0,
(24)

Mathematical Problems in Engineering 5
where
Π =
(((((((
(
𝑃𝐵 + 𝐵𝑇𝑃 0 𝑃 𝑃 𝑃𝑅 0
∗ 𝜏𝑄 0 0 0 0
∗ ∗ 0 0 0 0
∗ ∗ ∗ 0 0 0
∗ ∗ ∗ ∗ −1
𝜏𝑄 0
∗ ∗ ∗ ∗ ∗ −1
𝜃Θ
)))))))
)
. (25)
From model (12), we have
0 = 2 (𝑄1𝜂 (𝑡) + 𝑄
2𝜂 (𝑡))𝑇
⋅ (− 𝜂 (𝑡) + 𝐵𝜂 (𝑡) + (
𝑝 (𝑡)
0) + 𝑅∫
𝑡
𝑡−𝜏
𝜂 (𝑠) 𝑑𝑠)
= 𝜉𝑇(𝑡) Ξ𝜉 (𝑡) ,
(26)
whereΞ
=
(((((
(
𝑄𝑇
1𝐵 + 𝐵𝑇𝑄1−𝑄𝑇
1+ 𝐵𝑇𝑄𝑇
2𝑄𝑇
1𝑄𝑇
1𝑄𝑇
1𝑅 0
∗ −𝑄𝑇
2− 𝑄2𝑄𝑇
2𝑄𝑇
2𝑄𝑇
2𝑅 0
∗ ∗ 0 0 0 0
∗ ∗ ∗ 0 0 0
∗ ∗ ∗ ∗ 0 0
∗ ∗ ∗ ∗ ∗ 0
)))))
)
.
(27)
From formulas (18), (20), (24), and (26), we get
�� (𝑡) ≤ 𝜉𝑇(𝑡) (Λ
1+ Λ2+ Π + Ξ) 𝜉 (𝑡)
= 𝜉𝑇(𝑡) Ω𝜉 (𝑡) ,
(28)
whereΩ = Λ + Π + Ξ.Based on the above derivation, we have the following
result.
Theorem 5. The fault tolerant synchronization (3) and (6) isachieved if there exist constants 𝜏 > 0, 𝜃 > 0, 𝛿 > 0, and𝜀 > 0, the positive definite matrices 𝑃 = 𝑃𝑇 > 0, 𝑄 = 𝑄𝑇 > 0,and Θ > 0, and the matrices 𝑄
𝑗,𝑀𝑗, 𝑈𝑗, 𝑗 = 1, 2, 𝐿, 𝐶,𝐷, 𝑅
𝑖,
𝑖 = 1, 2, . . . , 8, such that the matrix Ω < 0.
Remark 6. After the extended transformation 𝑒(𝑡) → 𝜂(𝑡),system (7) is turned into system (12). Based on the Lyapunovfunctional in [15–21], we take Lyapunov functional
𝑉 (𝑡) = 𝜂𝑇(𝑡) 𝑃𝜂 (𝑡) + ∫
0
−𝜏
∫
𝑡
𝑡+𝑟
𝜂𝑇(𝑠) 𝑄 𝜂 (𝑠) 𝑑𝑠 𝑑𝑟
+ ∫
0
−𝜃
∫
𝑡
𝑡+𝑟
𝜂𝑇(𝑠) Θ 𝜂 (𝑠) 𝑑𝑠 𝑑𝑟,
(29)
and we get matrix Ω. The conservation of stability of errorsystem (7) can be decreased by choosing the matrices 𝑅
𝑖, 𝑖 =
1, 2, . . . , 8, and the constant 𝜀 > 0.
Corollary 7. When 𝐷 = 0 in system (3), result similar toTheorem 5 can be obtained.
When ℎ(𝑥(𝑡 − 𝜃)) = 0, inequality (18) is transformed to
𝜎𝑇(𝑡) Λ𝜎 (𝑡) ≥ 0, (30)
where
𝜎 (𝑡)
= (𝜂𝑇(𝑡) 𝜂𝑇(𝑡) (
𝑝 (𝑡)
0)
𝑇
(∫
𝑡
𝑡−𝜏
𝜂 (𝑠) 𝑑𝑠)
𝑇
)
𝑇
,
Λ =(
𝑆1+ 𝑆𝑇
10 𝑆2+ 𝑆𝑇
30
∗ 0 0 0
∗ ∗ 𝑆4+ 𝑆𝑇
40
∗ ∗ ∗ 0
),
𝑆1= (−𝜀𝑈𝑇
2𝑀20
0 0
) ,
𝑆2= (𝜀𝑈𝑇
2𝑀1𝜀𝑅1
0 𝜀𝑅2
) ,
𝑆3= (𝜀𝑈𝑇
1𝑀20
𝜀𝑅3𝜀𝑅4
) ,
𝑆4= (−𝜀𝑈𝑇
1𝑀1𝜀𝑅5
𝜀𝑅6
𝜀𝑅7
) ,
𝜀 > 0
(31)
is any constant. The proper dimension matrices 𝑅𝑖∈ 𝑅𝑛×𝑛,
𝑖 = 1, 2, . . . , 7, are arbitrary.We choose Lyapunov functional
𝑉 (𝑡) = 𝜂𝑇(𝑡) 𝑃𝜂 (𝑡) + ∫
0
−𝜏
∫
𝑡
𝑡+𝜃
𝜂𝑇(𝑠) 𝑄 𝜂 (𝑠) 𝑑𝑠 𝑑𝜃, (32)
and differentiating 𝑉(𝑡) with respect to 𝑡 and using Lemma 2yield
�� (𝑡) ≤ 𝜎𝑇(𝑡) Π𝜎 (𝑡) , (33)
where
Π =(
(
𝑃𝐵 + 𝐵𝑇𝑃 0 𝑃 𝑃𝑅
∗ 𝜏𝑄 0 0
∗ ∗ 0 0
∗ ∗ ∗ −1
𝜏𝑄
)
)
. (34)

6 Mathematical Problems in Engineering
From model (12), we have
0 = 2 (𝑄1𝜂 (𝑡) + 𝑄
2𝜂 (𝑡))𝑇
⋅ (− 𝜂 (𝑡) + 𝐵𝜂 (𝑡) + (
𝑝 (𝑡)
0) + 𝑅∫
𝑡
𝑡−𝜏
𝜂 (𝑠) 𝑑𝑠)
= 𝜎𝑇(𝑡) Ξ𝜎 (𝑡) ,
(35)
where
Ξ =(
𝑄𝑇
1𝐵 + 𝐵𝑇𝑄1−𝑄𝑇
1+ 𝐵𝑇𝑄𝑇
2𝑄𝑇
1𝑄𝑇
1𝑅
∗ −𝑄𝑇
2− 𝑄2𝑄𝑇
2𝑄𝑇
2𝑅
∗ ∗ 0 0
∗ ∗ ∗ 0
). (36)
Based on the above derivation, we have the following result.
Corollary 8. The fault tolerant synchronization (3) and (5) isachieved if there exist constants 𝜏, 𝜀 > 0, the positive definitematrices 𝑃 = 𝑃𝑇 > 0, 𝑄 = 𝑄𝑇 > 0, and the matrices𝑄𝑗,𝑀𝑗, 𝑈𝑗, 𝑗 = 1, 2, 𝑄
𝑗,𝑀𝑗, 𝑈𝑗, 𝑗 = 1, 2, 𝐿, 𝐶,𝐷, 𝑅
𝑖, 𝑖 =
1, 2, . . . , 7, such that matrix Ω < 0.
3.2. Fault Tolerant Synchronization Analysis When 𝑓(𝑡) and𝑓(𝑡) Are Derivable on 𝑥(𝑡). Let 𝑑𝑓(𝑡)/𝑑𝑥(𝑡) = ℏ(𝑥(𝑡)) =𝐻 ⋅ 𝐹(𝑥(𝑡)) ⋅ 𝑁 and 𝑑𝑓(𝑡)/𝑑𝑥(𝑡) = ℏ(𝑥(𝑡)) = 𝐻 ⋅ 𝐹(𝑥(𝑡)) ⋅𝑁, 𝐻,𝑁 be proper dimension matrices, with satisfying𝐹𝑇(𝑥(𝑡))𝐹(𝑥(𝑡)) ≤ 𝐼, where 𝐻,𝑁 are proper dimension
matrices and 𝐼 is identity matrix. Then,
𝑒 (𝑡) = 𝐴𝑒 (𝑡) + 𝑔 (𝑥 (𝑡)) − 𝑔 (𝑥 (𝑡)) + ℎ (𝑥 (𝑡 − 𝜃))
− ℎ (𝑥 (𝑡 − 𝜃)) + 𝐸𝑓 (𝑡) − 𝐿𝐶𝑒 (𝑡) + 𝐿𝐶𝑒 (𝑡)
− 𝐿𝐶𝑒 (𝑡 − 𝜏) − 𝐿𝐷𝑓 (𝑡) + 𝐿𝐷𝑓 (𝑡)
− 𝐿𝐷𝑓 (𝑡 − 𝜏)
= (𝐴 − 𝐿𝐶) 𝑒 (𝑡) + 𝑔 (𝑥 (𝑡)) − 𝑔 (𝑥 (𝑡))
+ (𝐸 − 𝐿𝐷)𝑓 (𝑡) + 𝐿𝐶∫
𝑡
𝑡−𝜏
𝑒 (𝑠) 𝑑𝑠
+ 𝐿𝐷∫
𝑡
𝑡−𝜏
𝑓 (𝑠) 𝑑𝑠.
(37)
Suppose 𝜂(𝑡) = ( 𝑒(𝑡)𝑓(𝑡)); we have
𝑒 (𝑡) = (𝐴 − 𝐿𝐶, 𝐸 − 𝐿𝐷)(
𝑒 (𝑡)
𝑓 (𝑡)
) + 𝑔 (𝑥 (𝑡))
− 𝑔 (𝑥 (𝑡)) + ℎ (𝑥 (𝑡 − 𝜃)) − ℎ (𝑥 (𝑡 − 𝜃))
+ (𝐿𝐶, 𝐿𝐷)(
∫
𝑡
𝑡−𝜏
𝑒 (𝑠) 𝑑𝑠
∫
𝑡
𝑡−𝜏
𝑓 (𝑠) 𝑑𝑠
)
= (𝐴 − 𝐿𝐶, 𝐸 − 𝐿𝐷) 𝜂 (𝑡) + 𝑔 (𝑥 (𝑡)) − 𝑔 (𝑥 (𝑡))
+ ℎ (𝑥 (𝑡 − 𝜃)) − ℎ (𝑥 (𝑡 − 𝜃))
+ (𝐿𝐶, 𝐿𝐷)∫
𝑡
𝑡−𝜏
𝜂 (𝑠) 𝑑𝑠.
(38)
According to 𝑑𝑓(𝑡)/𝑑𝑥(𝑡) = ℏ(𝑥(𝑡)) = 𝐻 ⋅ 𝐹(𝑥(𝑡)) ⋅ 𝑁,𝑑𝑓(𝑡)/𝑑𝑥(𝑡) = ℏ(𝑥(𝑡)) = 𝐻 ⋅ 𝐹(𝑥(𝑡)) ⋅ 𝑁, we get
𝑓 (𝑡) = ∫
1
0
ℏ ((1 − 𝜆) 𝑥 (𝑡) + 𝜆𝑥 (𝑡)) 𝑒 (𝑡) 𝑑𝜆
= ∫
1
0
𝐻 ⋅ 𝐹 ((1 − 𝜆) 𝑥 (𝑡) + 𝜆𝑥 (𝑡)) ⋅ 𝑁 ⋅ 𝑒 (𝑡) 𝑑𝜆,
− 𝛿𝑓 (𝑡)
+ 𝛿∫
1
0
𝐻 ⋅ 𝐹 ((1 − 𝜆) 𝑥 (𝑡) + 𝜆𝑥 (𝑡)) ⋅ 𝑁 ⋅ 𝑒 (𝑡) 𝑑𝜆
= 0,
(𝛿∫
1
0
𝐻 ⋅ 𝐹 ((1 − 𝜆) 𝑥 (𝑡) + 𝜆𝑥 (𝑡)) ⋅ 𝑁𝑑𝜆, −𝛿𝐼) 𝜂 (𝑡)
= 0,
(39)
where 𝛿 > 0. Consider
(
𝐼 0
0 0) 𝜂 (𝑡)
= (
𝐴 − 𝐿𝐶 𝐸 − 𝐿𝐷
𝛿∫
1
0
𝐻 ⋅ 𝐹 ((1 − 𝜆) 𝑥 (𝑡) + 𝜆𝑥 (𝑡)) ⋅ 𝑁𝑑𝜆 −𝛿𝐼
)𝜂 (𝑡)
+ (
𝑔 (𝑥 (𝑡)) − 𝑔 (𝑥 (𝑡))
0) + (
𝐿𝐶 𝐿𝐷
0 0)∫
𝑡
𝑡−𝜏
𝜂 (𝑠) 𝑑𝑠,
𝐸1𝜂 (𝑡) = 𝐵𝜂 (𝑡) + (
𝑝 (𝑡)
0) + (
𝑞 (𝑡)
0) + 𝑅∫
𝑡
𝑡−𝜏
𝜂 (𝑠) 𝑑𝑠,
(40)
where
𝐸1= (
𝐼 0
0 0) ,
𝐵
= (
𝐴 − 𝐿𝐶 𝐸 − 𝐿𝐷
𝛿∫
1
0
𝐻 ⋅ 𝐹 ((1 − 𝜆) 𝑥 (𝑡) + 𝜆𝑥 (𝑡)) ⋅ 𝑁𝑑𝜆 −𝛿𝐼
) ,
𝑝 (𝑡) = 𝑔 (𝑥 (𝑡)) − 𝑔 (𝑥 (𝑡)) ,
𝑅 = (
𝐿𝐶 𝐿𝐷
0 0) .
(41)

Mathematical Problems in Engineering 7
From the assumption, we have
𝜍𝑇(𝑡) Λ1𝜍 (𝑡) ≥ 0, (42)
where
𝜍 (𝑡) = (𝜂𝑇(𝑡) 𝑒𝑇(𝑡) (𝑝
𝑇(𝑡) 0) (𝑞
𝑇(𝑡) 0) ∫
𝑡
𝑡−𝜏
𝜂𝑇(𝑠) 𝑑𝑠 ∫
𝑡
𝑡−𝜃
𝑒𝑇(𝑠) 𝑑𝑠)
𝑇
,
Λ1=
(((((
(
𝑆1+ 𝑆𝑇
10 0 𝑆
2+ 𝑆𝑇
30 0
∗ 0 0 0 0 0
∗ ∗ 𝑆4+ 𝑆𝑇
40 0 0
∗ ∗ ∗ 0 0 0
∗ ∗ ∗ ∗ 0 0
∗ ∗ ∗ ∗ ∗ 0
)))))
)
,
𝑆1= (−𝜀𝑈𝑇
2𝑀20
0 0
) ,
𝑆2= (𝜀𝑈𝑇
2𝑀1𝜀𝑅1
0 𝜀𝑅2
) ,
𝑆3= (𝜀𝑈𝑇
1𝑀20
𝜀𝑅3𝜀𝑅4
) ,
𝑆4= (−𝜀𝑈𝑇
1𝑀1𝜀𝑅5
𝜀𝑅6
𝜀𝑅7
) ,
𝜀 > 0
(43)
is any constant. The proper dimension matrices 𝑅𝑖∈ 𝑅𝑛×𝑛,
𝑖 = 1, 2, . . . , 7, are arbitrary
𝜍𝑇(𝑡) Λ2𝜍 (𝑡) ≥ 0, (44)
where
Λ2
= 𝛿
(((((
(
𝑌𝑇
1Δ𝑌10 0 𝑌
𝑇
1Δ𝑌30 𝑌
𝑇
1Δ𝑌2
∗ 0 0 0 0 0
∗ ∗ 0 0 0 0
∗ ∗ ∗ 𝑌𝑇
3Δ𝑌30 𝑌
𝑇
3Δ𝑌2
∗ ∗ ∗ ∗ 0 0
∗ ∗ ∗ ∗ ∗ −𝑊𝑇
2𝑉2− 𝑉𝑇
2𝑊2
)))))
)
,
𝛿 > 0,
𝑌1= (
𝐼 0
0 0) ,
𝑌2= (
−𝐼 0
0 0) ,
𝑌3= (
0 0
𝐼 𝑅8
) ,
Δ = (
−𝑊𝑇
2𝑉2− 𝑉𝑇
2𝑊2𝑊𝑇
2𝑉1+ 𝑉𝑇
2𝑊1
∗ −𝑊𝑇
1𝑉1− 𝑉𝑇
1𝑊1
) .
(45)
We choose Lyapunov function
𝑉 (𝑡) = 𝑒𝑇(𝑡) 𝑃1𝑒 (𝑡) + ∫
0
−𝜏
∫
𝑡
𝑡+𝑟
𝑒𝑇(𝑠) 𝑄 𝑒 (𝑠) 𝑑𝑠 𝑑𝑟
+ ∫
0
−𝜃
∫
𝑡
𝑡+𝑟
𝑒𝑇(𝑠) Θ 𝑒 (𝑠) 𝑑𝑠 𝑑𝑟

8 Mathematical Problems in Engineering
= 𝜂𝑇(𝑡) 𝑃𝐸
1𝜂 (𝑡) + ∫
0
−𝜏
∫
𝑡
𝑡+𝜃
𝑒𝑇(𝑠) 𝑄 𝑒 (𝑠) 𝑑𝑠 𝑑𝜃
+ ∫
0
−𝜃
∫
𝑡
𝑡+𝑟
𝑒𝑇(𝑠) Θ 𝑒 (𝑠) 𝑑𝑠 𝑑𝑟,
(46)
where 𝑃 = ( 𝑃1 𝑃20 𝑃3
), and it is easy to know that 𝑃𝐸1= 𝐸𝑇
1𝑃𝑇.
The derivation of 𝑉(𝑡) on 𝑡 is
�� (𝑡) = 2𝜂𝑇(𝑡) 𝑃𝐸
1𝜂 (𝑡) + 𝜏 𝑒
𝑇(𝑡) 𝑄 𝑒 (𝑡)
− ∫
𝑡
𝑡−𝜏
𝑒𝑇(𝑠) 𝑄 𝑒 (𝑠) 𝑑𝑠 + 𝜃 𝑒
𝑇(𝑡) Θ 𝑒 (𝑡)
− ∫
𝑡
𝑡−𝜃
𝑒𝑇(𝑠) Θ 𝑒 (𝑠) 𝑑𝑠
= 2𝜂𝑇(𝑡) 𝑃𝐵𝜂 (𝑡) + 2𝜂
𝑇(𝑡) 𝑃(
𝑝 (𝑡)
0)
+ 2𝜂𝑇(𝑡) 𝑃𝑅∫
𝑡
𝑡−𝜏
𝜂 (𝑠) 𝑑𝑠 + 𝜏 𝑒𝑇(𝑡) 𝑄 𝑒 (𝑡)
− ∫
𝑡
𝑡−𝜏
𝑒𝑇(𝑠) 𝑄 𝑒 (𝑠) 𝑑𝑠 + 𝜃 𝑒
𝑇(𝑡) Θ 𝑒 (𝑡)
− ∫
𝑡
𝑡−𝜃
𝑒𝑇(𝑠) Θ 𝑒 (𝑠) 𝑑𝑠.
(47)
From Lemma 2, we have
�� (𝑡) ≤ 𝜂𝑇(𝑡) (𝑃𝐵 + 𝐵
𝑇𝑃𝑇) 𝜂 (𝑡) + 2𝜂
𝑇(𝑡) 𝑃(
𝑝 (𝑡)
0
)
+ 2𝜂𝑇(𝑡) 𝑃(
𝑞 (𝑡)
0
) + 2𝜂𝑇(𝑡) 𝑃𝑅∫
𝑡
𝑡−𝜏
𝜂 (𝑠) 𝑑𝑠
+ 𝜏 𝑒𝑇(𝑡) 𝑄 𝑒 (𝑡)
−1
𝜏(∫
𝑡
𝑡−𝜏
𝑒𝑇(𝑠) 𝑑𝑠)
𝑇
𝑄(∫
𝑡
𝑡−𝜏
𝑒𝑇(𝑠) 𝑑𝑠)
+ 𝜃 𝑒𝑇(𝑡) Θ 𝑒 (𝑡)
−1
𝜃(∫
𝑡
𝑡−𝜃
𝑒𝑇(𝑠) 𝑑𝑠)
𝑇
Θ(∫
𝑡
𝑡−𝜃
𝑒 (𝑠) 𝑑𝑠)
= 𝜍𝑇(𝑡) Π𝜍 (𝑡) ,
(48)
where
Π =
(((((((
(
𝑃𝐵 + 𝐵𝑇𝑃𝑇0 𝑃 𝑃 𝑃𝑅 0
∗ 𝜏𝑄 0 0 0 0
∗ ∗ 0 0 0 0
∗ ∗ ∗ 0 0 0
∗ ∗ ∗ ∗ −1
𝜏𝑄 0
∗ ∗ ∗ ∗ ∗ −1
𝜃Θ
)))))))
)
. (49)
From model (3), we have
0 = 2(𝑄1𝑒 (𝑡) + 𝑄
2𝑒 (𝑡) + 𝑄
3∫
𝑡
𝑡−𝜏
𝜂 (𝑠) 𝑑𝑠)
𝑇
(− 𝑒 (𝑡)
+ (𝐴 − 𝐿𝐶, 𝐸 − 𝐿𝐷) 𝜂 (𝑡) + 𝑝 (𝑡) + 𝑞 (𝑡)
+ (𝐿𝐶, 𝐿𝐷)∫
𝑡
𝑡−𝜏
𝜂 (𝑠) 𝑑𝑠) = 𝜍𝑇(𝑡) Ξ𝜍 (𝑡) ,
(50)
where
Ξ =
(((((
(
Ξ11Ξ12Ξ13Ξ13Ξ140
∗ Ξ22Ξ23Ξ23Ξ240
∗ ∗ Ξ330 Ξ340
∗ ∗ ∗ Ξ33Ξ340
∗ ∗ ∗ ∗ Ξ440
∗ ∗ ∗ ∗ ∗ 0
)))))
)
,
Ξ11= (𝑄𝑇
1
0
) (𝐴 − 𝐿𝐶, 𝐸 − 𝐿𝐷) + ((𝑄𝑇
1
0
) (𝐴 − 𝐿𝐶, 𝐸 − 𝐿𝐷))
𝑇
,
Ξ12= −(
𝑄𝑇
1
0
) + (𝑄𝑇
2(𝐴 − 𝐿𝐶, 𝐸 − 𝐿𝐷))
𝑇
,
Ξ13= (𝑄𝑇
1
0
) (𝐼, 𝑅8) ,
Ξ14= (𝑄𝑇
1
0
) (𝐿𝐶, 𝐿𝐷) + (𝑄𝑇
3(𝐴 − 𝐿𝐶, 𝐸 − 𝐿𝐷))
𝑇
,
Ξ22= − (𝑄
2+ 𝑄𝑇
2) ,
Ξ23= 𝑄𝑇
2(𝐼, 𝑅9) ,
Ξ24= −𝑄3+ 𝑄𝑇
2(𝐿𝐶, 𝐿𝐷)
𝑇,
Ξ33= 0,
Ξ34= 𝑄𝑇
3(𝐼, 𝑅9) ,
Ξ44= 𝑄𝑇
3(𝐿𝐶, 𝐿𝐷) + (𝑄
𝑇
3(𝐿𝐶, 𝐿𝐷))
𝑇
,
(51)
where the proper dimension matrices 𝑅9∈ 𝑅𝑛×𝑛 is arbitrary.
From formulas (42), (44), (48), and (50), we get
�� (𝑡) ≤ 𝜍𝑇(𝑡) (Λ + Π + Ξ) 𝜍 (𝑡) = 𝜍
𝑇(𝑡) Ω𝜍 (𝑡) , (52)

Mathematical Problems in Engineering 9
where
Ω = Λ + Π + Ξ = (
Ω11Ω12
∗ Ω22
) ,
Ω11= (𝑆1+ 𝑆𝑇
1+ Ξ11+ 𝑌𝑇
1Δ𝑌1+ 𝑃𝐵 + 𝐵
𝑇𝑃𝑇
Ξ12
∗ 𝜏𝑄 + Ξ22
) ,
Ω12= (𝑃 + Ξ
13𝑆2+ 𝑆𝑇
3+ Ξ13+ 𝑃 + 𝑌
𝑇
1Δ𝑌3𝑃𝑅 + Ξ
14𝑌𝑇
1Δ𝑌2
Ξ23
Ξ23
Ξ24
0
) ,
Ω22=(
𝑆4+ 𝑆𝑇
40 Ξ
340
∗ 𝑌𝑇
3Δ𝑌3
Ξ34
𝑌𝑇
3Δ𝑌2
∗ ∗ −𝜏−1𝑄 + Ξ
440
∗ ∗ ∗ −𝑊𝑇
2𝑉2− 𝑉𝑇
2𝑊2
),
𝑃𝐵 + 𝐵𝑇𝑃𝑇= (
𝑃1(𝐴 − 𝐿𝐶) 𝑃
1(𝐸 − 𝐿𝐷) − 𝛿𝑃
2
0 −𝛿𝑃3
) + (
𝑃1(𝐴 − 𝐿𝐶) 𝑃
1(𝐸 − 𝐿𝐷) − 𝛿𝑃
2
0 −𝛿𝑃3
)
𝑇
+ 𝛿(
𝑃2𝐻∫
1
0
𝐹 ((1 − 𝜆) 𝑥 (𝑡) + 𝜆𝑥 (𝑡)) 𝑑𝜆𝑁 0
𝑃3𝐻∫
1
0
𝐹 ((1 − 𝜆) 𝑥 (𝑡) + 𝜆𝑥 (𝑡)) 𝑑𝜆𝑁 0
) + 𝛿(
𝑃2𝐻∫
1
0
𝐹 ((1 − 𝜆) 𝑥 (𝑡) + 𝜆𝑥 (𝑡)) 𝑑𝜆𝑁 0
𝑃3𝐻∫
1
0
𝐹 ((1 − 𝜆) 𝑥 (𝑡) + 𝜆𝑥 (𝑡)) 𝑑𝜆𝑁 0
)
𝑇
= 𝑍 + 𝑍𝑇+ 𝛿(
𝑃2𝐻
𝑃3𝐻)∫
1
0
𝐹 ((1 − 𝜆) 𝑥 (𝑡) + 𝜆𝑥 (𝑡)) 𝑑𝜆 (𝑁 0)
+ 𝛿 [(
𝑃2𝐻
𝑃3𝐻)∫
1
0
𝐹 ((1 − 𝜆) 𝑥 (𝑡) + 𝜆𝑥 (𝑡)) 𝑑𝜆 (𝑁 0)]
𝑇
,
(53)
where 𝑍 = ( 𝑃1(𝐴−𝐿𝐶) 𝑃1(𝐸−𝐿𝐷)−𝛿𝑃20 −𝛿𝑃
3
) .
FromLemma 3, we obtain that 𝑆1+𝑆𝑇
1+Ξ11+𝑃𝐵+𝐵
𝑇𝑃𝑇<
0 is equivalent to
𝑆1+ 𝑆𝑇
1+ Ξ11+ 𝑍 + 𝑍
𝑇
+ 𝜀−1𝛿2(
𝑃2𝐻𝐻𝑇𝑃𝑇
2𝑃2𝐻𝐻𝑇𝑃𝑇
3
∗ 𝑃3𝐻𝐻𝑇𝑃𝑇
3
)
+ 𝜀(𝑁𝑇𝑁 0
0 0
) < 0.
(54)
Based on the above derivation, we have the following result.
Theorem 9. The fault tolerant synchronization (3) and (6)is achieved if there exist constants 𝜏, 𝜀 > 0, 𝛿 > 0, thepositive definite matrices 𝑃
1= 𝑃𝑇
1> 0, 𝑄 = 𝑄𝑇 > 0, and
the matrices 𝑄𝑗,𝑀𝑗, 𝑈𝑗, 𝑗 = 1, 2, 𝑄
𝑗,𝑀𝑗, 𝑈𝑗, 𝑗 = 1, 2,
𝐿, 𝐶,𝐷, 𝑅𝑖, 𝑖 = 1, 2, . . . , 9, such that matrix Σ < 0, where
Σ = (
Σ11Ω12
∗ Ω22
) ,
Θ11= 𝑆1+ 𝑆𝑇
1+ Ξ11+ 𝑍 + 𝑍
𝑇
+ 𝜀−1𝛿2(
𝑃2𝐻𝐻𝑇𝑃𝑇
2𝑃2𝐻𝐻𝑇𝑃𝑇
3
∗ 𝑃3𝐻𝐻𝑇𝑃𝑇
3
)
+ 𝜀(𝑁𝑇𝑁 0
0 0
) .
(55)
Remark 10. After extending system (37) to singular system(40) by the transformation 𝑒(𝑡) → 𝜂(𝑡), taking propermatrices 𝑅
𝑖, 𝑖 = 1, 2, . . . , 9, and the constant 𝜀 > 0 can

10 Mathematical Problems in Engineering
decrease the conservation of stability of error system (37) byconstructing the Lyapunov functional
𝑉 (𝑡) = 𝑒𝑇(𝑡) 𝑃1𝑒 (𝑡) + ∫
0
−𝜏
∫
𝑡
𝑡+𝑟
𝑒𝑇(𝑠) 𝑄 𝑒 (𝑠) 𝑑𝑠 𝑑𝑟
+ ∫
0
−𝜃
∫
𝑡
𝑡+𝑟
𝑒𝑇(𝑠) Θ 𝑒 (𝑠) 𝑑𝑠 𝑑𝑟
= 𝜂𝑇(𝑡) 𝑃𝐸
1𝜂 (𝑡) + ∫
0
−𝜏
∫
𝑡
𝑡+𝜃
𝑒𝑇(𝑠) 𝑄 𝑒 (𝑠) 𝑑𝑠 𝑑𝜃
+ ∫
0
−𝜃
∫
𝑡
𝑡+𝑟
𝑒𝑇(𝑠) Θ 𝑒 (𝑠) 𝑑𝑠 𝑑𝑟.
(56)
When ℎ(𝑥(𝑡 − 𝜃)) = 0, inequality (26) is transformed to
𝜔𝑇(𝑡) Λ𝜔 (𝑡) ≥ 0, (57)
where𝜔 (𝑡)
= (𝜂𝑇(𝑡) 𝑒𝑇(𝑡) (
𝑝 (𝑡)
0)
𝑇
(∫
𝑡
𝑡−𝜏
𝑒 (𝑠) 𝑑𝑠)
𝑇
)
𝑇
,
Λ =(
𝑆1+ 𝑆𝑇
10 𝑆2+ 𝑆𝑇
30
∗ 0 0 0
∗ ∗ 𝑆4+ 𝑆𝑇
40
∗ ∗ ∗ 0
),
𝑆1= (−𝜀𝑈𝑇
2𝑀20
0 0
) ,
𝑆2= (𝜀𝑈𝑇
2𝑀1𝜀𝑅1
0 𝜀𝑅2
) ,
𝑆3= (𝜀𝑈𝑇
1𝑀20
𝜀𝑅3𝜀𝑅4
) ,
𝑆4= (−𝜀𝑈𝑇
1𝑀1𝜀𝑅5
𝜀𝑅6
𝜀𝑅7
) ,
𝜀 > 0
(58)
is any constant. The proper dimension matrices 𝑅𝑖∈ 𝑅𝑛×𝑛,
𝑖 = 1, 2, . . . , 7, are arbitrary.We choose Lyapunov function
𝑉 (𝑡) = 𝑒𝑇(𝑡) 𝑃1𝑒 (𝑡) + ∫
0
−𝜏
∫
𝑡
𝑡+𝜃
𝑒𝑇(𝑠) 𝑄 𝑒 (𝑠) 𝑑𝑠 𝑑𝜃
= 𝜂𝑇(𝑡) 𝑃𝐸
1𝜂 (𝑡) + ∫
0
−𝜏
∫
𝑡
𝑡+𝜃
𝑒𝑇(𝑠) 𝑄 𝑒 (𝑠) 𝑑𝑠 𝑑𝜃,
(59)
where 𝑃 = ( 𝑃1 𝑃20 𝑃3
), and it is easy to know that 𝑃𝐸1= 𝐸𝑇
1𝑃𝑇,
and differentiating 𝑉(𝑡) with respect to 𝑡 and using Lemma 2yield
�� (𝑡) ≤ 𝜔𝑇(𝑡) Π𝜔 (𝑡) , (60)
where
Π =(
(
𝑃𝐵 + 𝐵𝑇𝑃𝑇0 𝑃 𝑃𝑅
∗ 𝜏𝑄 0 0
∗ ∗ 0 0
∗ ∗ ∗ −1
𝜏𝑄
)
)
. (61)
From model (12), we have
0 = 2(𝑄1𝑒 (𝑡) + 𝑄
2𝑒 (𝑡) + 𝑄
3∫
𝑡
𝑡−𝜏
𝜂 (𝑠) 𝑑𝑠)
𝑇
(− 𝑒 (𝑡)
+ (𝐴 − 𝐿𝐶, 𝐸 − 𝐿𝐷) 𝜂 (𝑡) + 𝑝 (𝑡)
+ (𝐿𝐶, 𝐿𝐷)∫
𝑡
𝑡−𝜏
𝜂 (𝑠) 𝑑𝑠) = 𝜎𝑇(𝑡) Ξ𝜎 (𝑡) ,
(62)
where
Ξ =(
Ξ11Ξ12Ξ13Ξ14
∗ Ξ22Ξ23Ξ24
∗ ∗ Ξ33Ξ34
∗ ∗ ∗ Ξ44
),
Ξ11= (𝑄𝑇
1
0
) (𝐴 − 𝐿𝐶, 𝐸 − 𝐿𝐷) + ((𝑄𝑇
1
0
) (𝐴 − 𝐿𝐶, 𝐸 − 𝐿𝐷))
𝑇
,
Ξ12= −(
𝑄𝑇
1
0
) + (𝑄𝑇
2(𝐴 − 𝐿𝐶, 𝐸 − 𝐿𝐷))
𝑇
,
Ξ13= (𝑄𝑇
1
0
) (𝐼, 𝑅8) ,
Ξ14= (𝑄𝑇
1
0
) (𝐿𝐶, 𝐿𝐷) + (𝑄𝑇
3(𝐴 − 𝐿𝐶, 𝐸 − 𝐿𝐷))
𝑇
,
Ξ22= − (𝑄
2+ 𝑄𝑇
2) ,
Ξ23= 𝑄𝑇
2(𝐼, 𝑅8) ,
Ξ24= −𝑄3+ 𝑄𝑇
2(𝐿𝐶, 𝐿𝐷)
𝑇,
Ξ33= 0,
Ξ34= 𝑄𝑇
3(𝐼, 𝑅8) ,
Ξ44= 𝑄𝑇
3(𝐿𝐶, 𝐿𝐷) + (𝑄
𝑇
3(𝐿𝐶, 𝐿𝐷))
𝑇
,
(63)
where the proper dimension matrices 𝑅8∈ 𝑅𝑛×𝑛 is arbitrary.
Based on the above derivation, we have the followingresult.
Corollary 11. The fault tolerant synchronization (3) and (5)is achieved if there exist constants 𝜏, 𝜀 > 0, 𝛿 > 0, thepositive definite matrices 𝑃
1= 𝑃𝑇
1> 0, 𝑄 = 𝑄𝑇 > 0, and

Mathematical Problems in Engineering 11
0 0.5 1 1.5 2 2.5 3 3.5 4
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
4 6 80 12102
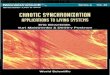
Figure 1: The state responses of 𝑥(𝑡) and 𝑥(𝑡) when 𝑓(𝑡) and 𝑓(𝑡) are derivable on 𝑡.
the matrices 𝑄𝑗,𝑀𝑗, 𝑈𝑗, 𝑗 = 1, 2, 𝑄
𝑗,𝑀𝑗, 𝑈𝑗, 𝑗 = 1, 2,
𝐿, 𝐶,𝐷, 𝑅𝑖, 𝑖 = 1, 2, . . . , 8, such that matrix Θ < 0, where
Θ = (
Θ11Ω12
∗ Ω22
) ,
Θ11= 𝑆1+ 𝑆𝑇
1+ Ξ11+ 𝑍 + 𝑍
𝑇
+ 𝜀−1𝛿2(
𝑃2𝐻𝐻𝑇𝑃𝑇
2𝑃2𝐻𝐻𝑇𝑃𝑇
3
∗ 𝑃3𝐻𝐻𝑇𝑃𝑇
3
)
+ 𝜀(𝑁𝑇𝑁 0
0 0
) .
(64)
4. Numerical Examples
Example 1. Consider a typical delayed Hopfield neural net-works [29–32] with two neurons
𝐴 = −𝐼,
𝑔 (𝑥 (𝑡)) = (
2.0 −0.1
−5.0 3.0)(
tanh (𝑥1(𝑡))
tanh (𝑥2(𝑡))) ,
ℎ (𝑥 (𝑡 − 𝜃)) = (
0.15 −0.1
−0.2 −2.5)(
tanh (𝑥1(𝑡 − 𝜃))
tanh (𝑥2(𝑡 − 𝜃))
) ,
𝜏 = 0.01,
𝜃 = 1,
𝐿𝐶 = 𝐿𝐷 = −38𝐼,
𝐸 = 2𝐼,
𝑥 (𝑡) = (
𝑥1
𝑥2
) .
(65)
When 𝑓(𝑡) and 𝑓(𝑡) are derivable on 𝑡, we take
𝑓 (𝑡) ={
{
{
(0, 0)𝑇, 0 ≤ 𝑡 ≤ 2
(0, 2 sin 𝑡)𝑇 , 𝑡 ≥ 2,
𝑓 (𝑡) = (
0.2 0
0 0)(
𝑥1(𝑡) − 𝑥
3(𝑡)
𝑥2(𝑡) − 𝑥
4(𝑡)) − 2𝑓 (𝑡) .
(66)
Simulation results are shown in Figure 1.When 𝑓(𝑡) and 𝑓(𝑡) are derivable on 𝑥(𝑡), we take
𝑓 (𝑡)
={
{
{
(0, 0)𝑇, 0 ≤ 𝑡 ≤ 10
(0.2 sin (𝑥1(𝑡)) , 0.4 sin (𝑥
2(𝑡)))𝑇
, 𝑡 ≥ 10.
(67)
Simulation results are shown in Figure 2.
Example 2. Consider chaotic Lu system [31, 32]; that is,
𝐴 = (
−36 36 0
0 20 0
0 0 −3
) ,
𝑔 (𝑥 (𝑡)) = (
0
−𝑥1𝑥3
𝑥1𝑥2
),
(68)
where 𝑥(𝑡) = (𝑥1
𝑥2
𝑥3
). We choose
𝐿𝐶 = (
0 −38 0
0 −38 0
0 0 0
) ,
𝐿𝐷 = (
0 0 0
0 −38 0
0 0 0
) ,

12 Mathematical Problems in Engineering
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
4 6 8 10 120 2 4 6 8 10 120 2
Figure 2: The state responses of 𝑥(𝑡) and 𝑥(𝑡) when 𝑓(𝑡) and 𝑓(𝑡) are derivable on 𝑥(𝑡).
2 86 100 4
−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
2 4 6 8 100
0
1
2
3
4
5
6
2 4 6 8 100
−0.1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
Figure 3: The state responses of 𝑥(𝑡) and 𝑥(𝑡) when 𝑓(𝑡) and 𝑓(𝑡) are derivable on 𝑡.
𝐸 = (
2 0 0
0 2 0
0 0 2
) ,
𝜏 = 0.01.
(69)
When 𝑓(𝑡) and 𝑓(𝑡) are derivable on 𝑡, we take
𝑓 (𝑡) ={
{
{
(0, 0, 0)𝑇, 0 ≤ 𝑡 ≤ 2
(0, 2 sin 𝑡, 0)𝑇 , 𝑡 ≥ 2,(70)

Mathematical Problems in Engineering 13
2 4 6 8 10 12 140
−0.2
0
0.2
0.4
0.6
0.8
−1
0
1
2
3
4
5
6
42 6 8 10 12 14042 6 8 10 12 140
−0.2
0
0.2
0.4
0.6
0.8
Figure 4: The state responses of 𝑥(𝑡) and 𝑥(𝑡) when 𝑓(𝑡) and 𝑓(𝑡) are derivable on 𝑥(𝑡).
𝑓 (𝑡) = (
0.2 0
0 0)(
𝑥1(𝑡) − 𝑥
3(𝑡)
𝑥2(𝑡) − 𝑥
4(𝑡)) − 2𝑓 (𝑡) . (71)
Simulation results are shown in Figure 3.When 𝑓(𝑡) and 𝑓(𝑡) are derivable on 𝑥(𝑡), we take
𝑓 (𝑡)
={
{
{
(0, 0, 0)𝑇, 0 ≤ 𝑡 ≤ 5
(0, 0.4 sin (𝑥1(𝑡)) , 0.4 sin (𝑥
2(𝑡)))𝑇
, 𝑡 ≥ 5.
(72)
Simulation results are shown in Figure 4.
5. Conclusions
In this paper, taking into account the constant propagationdelay and actuator faults and the extended transformation ofthe error systems, the problem of the chaotic fault tolerantsynchronization has been addressed. The conservation ofstability of the error systems is lower than that of otherexisting literatures.
Conflict of Interests
The author declares that there is no conflict of interestsregarding the publication of this paper.
Acknowledgments
Thiswork is supported by theNational Natural Science Foun-dation of China (11071141), the Natural Science Foundation ofShandong Province of China (ZR2011AL018, ZR2011AQ008),a Project of Shandong Province Higher Educational Sci-ence and Technology Program (J13LI02, J11LA06), and theResearch Fund Project of Heze University (XY10KZ01).
References
[1] M. A. Aziz-Alaoui, “A survey of chaotic synchronization andsecure communication,” in Proceedings of the 12th IEEE Inter-national Conference on Electronics, Circuits and Systems (ICECS’05), pp. 1–4, IEEE, December 2005.
[2] L. M. Pecora and T. L. Carroll, “Synchronization in chaoticsystems,” Physical Review Letters, vol. 64, no. 8, pp. 821–824,1990.
[3] Q. Zhang, J. Zhou, and G. Zhang, “Stability concerning partialvariables for a class of time-varying systems and its application

14 Mathematical Problems in Engineering
in chaos synchronization,” in Proceeding of the 24th ChineseControl Conference, pp. 135–139, South China University ofTechnology Press, Guangzhou, China, 2005.
[4] X.Wang, X.Wu, Y. He, and G. Aniwar, “Chaos synchronizationof Chen system and its application to secure communication,”International Journal of Modern Physics B, vol. 22, no. 21, pp.3709–3720, 2008.
[5] Q.-L. Zhang, “Synchronization ofmulti-chaotic systems via ringimpulsive control,” Control Theory & Applications, vol. 27, no. 2,pp. 226–232, 2010.
[6] Q. Zhang, “Synchronization analysis of multiple systems basedon a class of symmetric matrix,” Bio Technology, vol. 10, no. 23,pp. 14496–14502, 2014.
[7] W.-H. Chen, Z. P. Wang, and X. M. Lu, “On sampled-data con-trol for master-slave synchronization of chaotic Lur’e systems,”IEEE Transactions on Circuits and Systems II: Express Briefs, vol.59, no. 8, pp. 515–519, 2012.
[8] S. J. Theesar, S. Banerjee, and P. Balasubramaniam, “Syn-chronization of chaotic systems under sampled-data control,”Nonlinear Dynamics. An International Journal of NonlinearDynamics and Chaos in Engineering Systems, vol. 70, no. 3, pp.1977–1987, 2012.
[9] J. Joomwong and V. N. Phat, “Adaptive control with twocontrollers of the Lu’s system,” Journal of InterdisciplinaryMathematics, vol. 13, no. 2, pp. 211–215, 2010.
[10] K. Ratchagit and V. N. Phat, “Synchronization of Lu’s systemusing active control,” International Journal of Applied Mathe-matics & Statistics, vol. 18, no. S10, pp. 36–40, 2010.
[11] K. Ratchagit, “A novel adaptive synchronization of Lu’s chaoticsystem,” European Journal of Scientific Research, vol. 45, no. 4,pp. 630–636, 2010.
[12] M. Rajchakit, P. Niamsup, and G. Rajchakit, “A switching rulefor exponential stability of switched recurrent neural networkswith interval time-varying delay,” Advances in Difference Equa-tions, vol. 2013, article 44, 2013.
[13] P. Niamsup, K. Ratchagit, and V. N. Phat, “Novel criteria forfinite-time stabilization and guaranteed cost control of delayedneural networks,” Neurocomputing, vol. 160, pp. 281–286, 2015.
[14] Y. P. Zhang and J. T. Sun, “Impulsive robust fault-tolerantfeedback control for chaotic Lur’e systems,” Chaos, Solitons &Fractals, vol. 39, no. 3, pp. 1440–1446, 2009.
[15] F. Huang, J. Wang, and J. Wang, “Adaptive observer basedfault-tolerant chaotic synchronization comunication design,”in Proceedings of the Chinese Control and Decision Conference(CCDC ’11), pp. 2894–2897, IEEE, Mianyang, China, May 2011.
[16] D.-Z. Ma, H.-G. Zhang, Z.-S. Wang, and J. Feng, “Fault tolerantsynchronization of chaotic systems based on T-S fuzzy modelwith fuzzy sampled-data controller,” Chinese Physics B, vol. 19,no. 5, Article ID 050506, 2010.
[17] Q. L. Hu and B. Xiao, “Fault-tolerant sliding mode attitude con-trol for flexible spacecraft under loss of actuator effectiveness,”Nonlinear Dynamics, vol. 64, no. 1-2, pp. 13–23, 2011.
[18] D. Chen, X. Huang, and T. Ren, “Study on chaotic faulttolerant synchronization control based on adaptive observer,”The Scientific World Journal, vol. 2014, Article ID 405396, 5pages, 2014.
[19] Q. Shen, B. Jiang, and V. Cocquempot, “Adaptive fault tolerantsynchronization with unknown propagation delays and actu-ator faults,” International Journal of Control, Automation andSystems, vol. 10, no. 5, pp. 883–889, 2012.
[20] D. Ye and X. Zhao, “Robust adaptive synchronization for aclass of chaotic systems with actuator failures and nonlinearuncertainty,” Nonlinear Dynamics, vol. 76, no. 2, pp. 973–983,2014.
[21] J. E. Stellet and T. Rogg, “On linear observers and application tofault detection in synchronous generators,” Control Theory andTechnology, vol. 12, no. 4, pp. 345–356, 2014.
[22] C. P. Tan and C. Edwards, “Sliding mode observers forreconstruction of simultaneous actuator and sensor faults,”in Proceedings of the 42nd IEEE Conference on Decision andControl, vol. 2, pp. 1455–1460, IEEE, New York, NY, USA,December 2003.
[23] H. Tao, D. Chen, andH. Yang, “Iterative learning fault diagnosisalgorithm for nonlinear systems based on extend filter,” Controland Decision, vol. 30, no. 6, pp. 1027–1032, 2015.
[24] M. Rajchakit, P. Niamsup, and G. Rajchakit, “A constructiveway to design a switching rule and switching regions to meansquare exponential stability of switched stochastic systems withnon-differentiable and interval time-varying delay,” Journal ofInequalities and Applications, vol. 2013, article 499, 2013.
[25] J. Sun and J. Chen, Stability Analysis and Application of Time-Delay Systems, Science Press, Beijing, China, 2012.
[26] I. R. Petersen and C. V. Hollot, “A Riccati equation approach tothe stabilization of uncertain linear systems,” Automatica, vol.22, no. 4, pp. 397–411, 1986.
[27] C. E. de Souza and X. Li, “Delay-dependent robust𝐻∞control
of uncertain linear state-delayed systems,” Automatica, vol. 35,no. 7, pp. 1313–1329, 1999.
[28] J. Wang, Q. Zhang, and D. Xiao, “Output strictly passive controlof uncertain singular neutral systems,” Mathematical Problemsin Engineering, vol. 2015, Article ID 591854, 12 pages, 2015.
[29] L. Xiang, J. Zhou, and Z. Liu, “On the asymptotic behaviorof Hopfield neural networks with periodic inputs,” AppliedMathematics andMecjamocs, vol. 23, no. 12, pp. 1367–1373, 2002.
[30] K. Gopalsamy and X. Z. He, “Stability in asymmetric Hopfieldnets with transmission delays,” Physica D. Nonlinear Phenom-ena, vol. 76, no. 4, pp. 344–358, 1994.
[31] J. Lu and J. Lu, “Controlling uncertain Lu system using linearfeedback,”Chaos, Solitons and Fractals, vol. 17, no. 1, pp. 127–133,2003.
[32] Y. Yu and S. Zhang, “Hopf bifurcation analysis of the Lu system,”Chaos, Solitons and Fractals, vol. 21, no. 5, pp. 1215–1220, 2004.

Submit your manuscripts athttp://www.hindawi.com
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttp://www.hindawi.com
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
CombinatoricsHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
International Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
The Scientific World JournalHindawi Publishing Corporation http://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com
Volume 2014 Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Stochastic AnalysisInternational Journal of