Embed Size (px)
Citation preview

Research ArticleComputation of Stability Delay Margin ofTime-Delayed Generator Excitation Control System witha Stabilizing Transformer
Saffet Ayasun UlaG EminoLlu and Fahin Soumlnmez
Department of Electrical and Electronics Engineering Nigde University 51240 Nigde Turkey
Correspondence should be addressed to Saffet Ayasun sayasunnigdeedutr
Received 20 August 2013 Accepted 15 April 2014 Published 13 May 2014
Academic Editor Victoria Vampa
Copyright copy 2014 Saffet Ayasun et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
This paper investigates the effect of time delays on the stability of a generator excitation control system compensated with astabilizing transformer known as rate feedback stabilizer to dampout oscillationsThe time delays are due to the use ofmeasurementdevices and communication links for data transfer An analytical method is presented to compute the delay margin for stabilityThedelaymargin is themaximum amount of time delay that the system can tolerate before it becomes unstable First without using anyapproximation the transcendental characteristic equation is converted into a polynomial without the transcendentality such that itsreal roots coincide with the imaginary roots of the characteristic equation exactlyThe resulting polynomial also enables us to easilydetermine the delay dependency of the system stability and the sensitivities of crossing roots with respect to the time delay Thenan expression in terms of system parameters and imaginary root of the characteristic equation is derived for computing the delaymargin Theoretical delay margins are computed for a wide range of controller gains and their accuracy is verified by performingsimulation studies Results indicate that the addition of a stabilizing transformer to the excitation system increases the delaymarginand improves the system damping significantly
1 Introduction
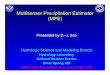
In electrical power systems load frequency control (LFC) andexcitation control system also known as automatic voltageregulator (AVR) equipment are installed for each generatorto maintain the system frequency and generator outputvoltage magnitude within the specified limits when changesin real and reactive power demand occur [1] This paperinvestigates the effect of the time delay on the stability of thegenerator excitation control system that includes a stabilizingtransformer Figure 1 shows the schematic block diagram ofa typical excitation control system for a large synchronousgenerator It consists of an exciter a phasormeasurement unit(PMU) a rectifier a stabilizing transformer (rate feedbackstabilizer) and a regulator [1]The exciter provides DC powerto the synchronous generatorrsquos field winding constitutingpower stage of the excitation system Regulator consists of aproportional-integral (PI) controller and an amplifier [1 2]
The regulator processes and amplifies input control signalsto a level and form appropriate for control of the exciterThe PI controller is used to improve the dynamic responseas well as reducing or eliminating the steady-state errorThe amplifier may be magnetic amplifier rotating amplifieror modern power electronic amplifier The PMU derivesits input from the secondary sides of the three phases ofthe potential transformer (voltage transducer) and outputsthe corresponding positive sequence voltage phasor Therectifier rectifies the generator terminal voltage and filtersit to a DC quantity The stabilizing transformer provides anadditional input signal to the regulator to damp power systemoscillations [2]
Time delays have become an important issue in powersystem control and dynamic analysis since the use of pha-sor measurement units (PMUs) and open and distributedcommunication networks for transferring measured signalsand data to the controller has introduced significant amount
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2014 Article ID 392535 10 pageshttpdxdoiorg1011552014392535
2 Mathematical Problems in Engineering
Rectifier
Potentialtransformers
Stabilizingtransformer
Regu
lato
r
G
+ +
_
Synchronousgenerator
Exciter
To the restof the system
i
+
Voltage (sensing)transducer
Phasormeasurement unit
eR
minusminus
minus
ifVa
f
ΔPΔQ
dc ac
ref
Figure 1 The schematic block diagram of the generator excitation control system
of time delays The PMUs are units that measure dynamicdata of power systems such as voltage current angle andfrequency using the discrete Fourier transform (DFT) [3]The use of PMUs introduces the measurement delays thatconsist of voltage transducer delay and processing delay Theprocessing delay is the amount of time required in convertingtransducer data into phasor informationwith the help ofDFT
In power systems various communication links used fordata transfer include both wired options such as telephonelines fiber-optic cables and power lines and wireless optionssuch as satellites [4] In power system control the totalmeasurement delay is reported to be in the order of millisec-onds Depending on the communication link used the totalcommunication delay is considered to be in the range of 100ndash700ms Measurement and communication delays involvedbetween the instant of measurement and that of signal beingavailable to the controller are themajor problem in the powersystem control This delay can typically be in the range of05ndash10 s [4ndash6] Another processing delay in the order ofmilliseconds is observedwhen adigital PI controller is used inthe regulator located in the feed-forward section of the AVRshown in Figure 1
The inevitable time delays in power systems have a desta-bilizing impact reduce the effectiveness of control systemdamping and lead to unacceptable performance such as lossof synchronism and instability Therefore stability analysisand controller design methods must take into account largetime delays and practical tools should be developed to studythe complicated dynamic behavior of time-delayed powersystems Specifically such tools should estimate the maxi-mum amount of time delay that the system could toleratewithout becoming unstable Such knowledge on the delaymargin (upper bound in the time delay) could also be helpfulin the controller design for cases where uncertainty in thedelay is unavoidable
The previous studies on the dynamics of time-delayedpower systems have mainly focused on the following issues(i) to investigate the time-delay influence on the controllerdesign for power system stabilizers (PSSs) [7] for loadfrequency control (LFC) [8 9] and for thyristor-controlled
series compensator (TCSC) [10] (ii) to determine andanalyze the cause of time delays and to find appropriatemethods to reduce their adverse effects [11ndash13] (iii) toeliminate periodic and chaotic oscillations in power systemsby applying time-delayed feedback control [14 15] (iv) toestimate the delay margin for small-signal stability of time-delayed power systems [16 17] However less attention hasbeen paid to the effects of time delays on the stability ofgenerator excitation control systems including a stabilizingtransformer
There are several methods in the literature to com-pute delay margins of general time-delayed systems Thecommon starting point of them is the determination ofall the imaginary roots of the characteristic equation Theexisting procedures can be classified into the followingfive distinguishable approaches (i) Schur-Cohn (Hermitematrix formation) [18ndash20] (ii) elimination of transcendentalterms in the characteristic equation [21] (iii) matrix pencilKronecker sum method [18ndash20 22] (iv) Kronecker multi-plication and elementary transformation [23] (v) Rekasiussubstitution [24ndash26] These methods demand numericalprocedures of different complexity and they may result indifferent precisions in computing imaginary roots A detailedcomparison of these methods demonstrating their strengthsand weakness can be found in [27]
This paper presents a direct approach based on themethod reported in [21] to compute the delay margin forstability of excitation control system including a stabilizingtransformer The proposed method is an analytically elegantprocedure that first converts the transcendental characteristicequation into a polynomial without the transcendentalityThis procedure does not use any approximation or substitu-tion to eliminate the transcendentality of the characteristicequation Therefore it is exact and the real roots of the newpolynomial coincide with the imaginary roots of the char-acteristic equation exactly The resulting polynomial withoutthe transcendentality also enables us to easily determine thedelay dependency of the system stability and the sensitivitiesof crossing roots (root tendency) with respect to the timedelay This is a remarkable feature of the proposed method
Mathematical Problems in Engineering 3
Amplifier Exciter Generator
Sensor and rectifier
PI controller
Measurement and communication
signal delay
+
Stabilizingtransformer
Vref(s)
minus
VE(s)GC(s) = KP +
KI
sGA(s) =
KA
1 + TAs
VR(s)
GF(s) =KFs
1 + TFs
eminuss120591
GE(s) =KE
1 + TEs
VF(s)GG(s) =
KG
1 + TGs
VT(s)
VS(s)GR(s) =
KR
1 + TRs
Figure 2 Block diagram of the excitation control system with a stabilizing transformer and time delay
Then an easy-to-use formula is derived to determine thedelay margin in terms of system parameters and imaginaryroots of the characteristic equation which is the maincontribution of the paper
In this work delay margins are first theoretically deter-mined for a wide range of PI controller gains Then theoret-ical delay margin results are verified by using time-domainsimulation capabilities of MatlabSimulink [28] Moreoverdelay margin results of the excitation control system with astabilizing transformer are compared with those of the exci-tation control system not including a stabilizing transformerIt is observed that the compensation of the excitation systemwith a stabilizing transformer increases the delay margin ofthe system (thus the stability margin) and provides signifi-cant amount of damping to system oscillations enhancing theclosed-loop stability of the time-delayed excitation controlsystem
2 AVR System Model with Time Delayand Stability
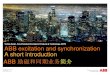
21 AVR System Model with Time Delay For load frequencycontrol and excitation control systems linear or linearizedmodels are commonly used to analyze the system dynamicsand to design a controller Figure 2 shows the block diagramof a generator excitation control system including a timedelay Note that each component of the system namelyamplifier exciter generator sensor and rectifier is modeledby a first-order transfer function [1 2] The transfer functionof each component is given below
119866119860 (119904) =
119870119860
1 + 119879119860119904 119866
119864 (119904) =119870119864
1 + 119879119864119904
119866119866 (119904) =
119870119866
1 + 119879119866119904 119866
119877 (119904) =119870119877
1 + 119879119877119904
(1)
where 119870119860 119870119864 119870119866 and 119870
119877are the gains of amplifier exciter
generator and sensor respectively and119879119860119879119864119879119866 and119879
119877are
the corresponding time constants
Note that as illustrated in Figure 2 using an exponentialterm the total of measurement and communication delays(120591) is placed in the feedback part of the excitation controlsystem Moreover a stabilizing transformer is introduced inthe system by adding a derivative feedback to the control sys-tem to improve the dynamic performance [2]The stabilizingtransformer will add a zero to the AVR open-loop transferfunction and thus will increase the relative stability of theclosed-loop system The transfer function of the stabilizingtransformer is given as follows
119866119865 (119904) =
119870119865119904
1 + 119904119879119865
(2)
where119870119865and 119879
119865are the gain and time constant respectively
The transfer function of the PI controller is described as
119866119888 (119904) = 119870
119875+
119870119868
119904 (3)
where 119870119875and 119870
119868are the proportional and integral gains
respectively The proportional term affects the rate of voltagerise after a step changeThe integral term affects the generatorvoltage settling time after initial voltage overshoot The inte-gral controller adds a pole at origin and increases the systemtype by one and reduces the steady-state errorThe combinedeffect of the PI controller will shape the response of thegenerator excitation system to reach the desired performance
22 Stability The characteristic equation of the excitationcontrol system can be easily obtained as
Δ (119904 120591) = 119875 (119904) + 119876 (119904) 119890minus119904120591
= 0 (4)
where119875(119904) and119876(119904) are polynomials in 119904with real coefficientsgiven below
119875 (119904) = 11990161199046+ 11990151199045+ 11990141199044+ 11990131199043+ 11990121199042+ 1199011119904
119876 (119904) = 11990221199042+ 1199021119904 + 1199020
(5)
The coefficients of these polynomials in terms of gains andtime constants are given in the Appendix
4 Mathematical Problems in Engineering
Stable region Unstable regionj120596
120591 = 0
120591 = 0
1205911 120591lowast 1205912
1205911 = 120591lowast minus Δ1205911205912 = 120591lowast + Δ120591
minusj120596c
j120596c
120590
1205911 lt 120591lowast lt 1205912
Figure 3 Illustration of the movement of the characteristic roots with respect to time delay
The main goal of the stability studies of time-delayedsystems is to determine conditions on the delay for any givenset of system parameters that will guarantee the stability ofthe system As with the delay-free system (ie 120591 = 0) thestability of the AVR system depends on the locations of theroots of systemrsquos characteristic equation defined by (4) It isobvious that the roots of (4) are a function of the time delay120591 As 120591 changes location of some of the roots may changeFor the system to be asymptotically stable all the roots of thecharacteristic equation of (4) must lie in the left half of thecomplex plane That is
Δ (119904 120591) = 0 forall119904 isin 119862+ (6)
where119862+ represents the right half plane of the complex planeDepending on system parameters there are two differentpossible types of asymptotic stability situations due to thetime delay 120591 [19 21]
(i) Delay-independent stability the characteristic equa-tion of (4) is said to be delay-independent stable ifthe stability condition of (6) holds for all positive andfinite values of the delay 120591 isin [0infin)
(ii) Delay-dependent stability the characteristic equationof (4) is said to be delay-dependent stable if thecondition of (6) holds for some values of delaysbelonging in the delay interval 120591 isin [0 120591
lowast) and is
violated for other values of delay 120591 ge 120591lowast
In the delay-dependent case the roots of the characteris-tic equations move as the time delay 120591 increases starting from120591 = 0 Figure 3 illustrates the movement of the roots Notethat the delay-free system (120591 = 0) is assumed to be stableThis is a realistic assumption since for the practical valuesof system parameters the excitation control system is stablewhen the total delay is neglected Observe that as the timedelay 120591 is increased a pair of complex eigenvalues moves inthe left half of the complex plane For a finite value of 120591 gt 0they cross the imaginary axis and pass to the right half planeThe time delay value 120591
lowast at which the characteristic equationhas purely imaginary eigenvalues is the upper bound on the
delay size or the delay margin for which the system willbe stable for any given delay less or equal to this bound120591 le 120591
lowast In order to characterize the stability property of (4)completely we first need to determine whether the system forany given set of parameters is delay-independent stable or notand if not to determine the delay margin 120591
lowast for a wide rangeof system parameters In the following section we present apractical approach that gives a criterion for evaluating thedelay dependency of stability and an analytical formula tocompute the delay margin for the delay-dependent case
3 Delay Margin Computation
A necessary and sufficient condition for the system to beasymptotically stable is that all the roots of the characteristicequation of (4) lie in the left half of the complex plane Inthe single delay case the problem is to find values of 120591lowast forwhich the characteristic equation of (4) has roots (if any) onthe imaginary axis of the s-plane Clearly Δ(s 120591) = 0 is animplicit function of 119904 and 120591 which may or may not cross theimaginary axis Assume for simplicity that Δ(119904 0) = 0 has allits roots in the left half plane That is the delay-free system isstable If for some 120591 Δ(119904 120591) = 0 has a root on the imaginaryaxis at 119904 = 119895120596
119888 so does Δ(minus119904 120591) = 0 for the same value
of 120591 and 120596119888because of the complex conjugate symmetry of
complex roots Therefore looking for roots on the imaginaryaxis reduces to finding values of 120591 for which Δ(119904 120591) = 0 andΔ(minus119904 120591) = 0 have a common root [21] That is
119875 (119904) + 119876 (119904) 119890minus119904120591
= 0
119875 (minus119904) + 119876 (minus119904) 119890119904120591
= 0
(7)
By eliminating exponential terms in (7) we get the followingpolynomial
119875 (119904) 119875 (minus119904) minus 119876 (119904) 119876 (minus119904) = 0 (8)
If we replace 119904 by 119895120596119888in (8) we have the polynomial in 120596
2
119888
given below
119882(1205962
119888) = 119875 (119895120596
119888) 119875 (minus119895120596
119888) minus 119876 (119895120596
119888) 119876 (minus119895120596
119888) = 0 (9)
Mathematical Problems in Engineering 5
Substituting 119875(119904) and 119876(119904) polynomials given in (5) into(9) we could obtain the following 12th order augmentedcharacteristic equation or polynomial
119882(1205962
119888) = 1199051212059612
119888+ 1199051012059610
119888+ 11990581205968
119888+ 11990561205966
119888
+ 11990541205964
119888+ 11990521205962
119888+ 1199050= 0
(10)
where the coefficients 1199050 1199052 1199054 1199056 1199058 11990510 11990512
are real-valuedand given in the Appendix
Please note that transcendental characteristic equationwith single delay given in (4) is now converted into apolynomial without the transcendentality given by (10) andits positive real roots coincide with the imaginary roots of(4) exactly The roots of this polynomial might easily bedetermined by standard methods Depending on the roots of(10) the following situation may occur
(i) The polynomial of (10) may not have any positive realroots which implies that the characteristic equationof (4) does not have any roots on the 119895120596-axis In thatcase the system is stable for all 120591 ge 0 indicating thatthe system is delay-independent stable
(ii) The polynomial of (10) may have at least one positivereal root which implies that the characteristic equa-tion of (4) has at least a pair of complex eigenvalues onthe 119895120596-axis In that case the system is delay-dependentstable
For a positive real root (120596119888) of (10) the corresponding value
of delay margin 120591lowast can be easily obtained using (7) as [21]
120591lowast=
1
120596119888
Tanminus1 (Im 119875 (119895120596
119888) 119876 (119895120596
119888)
Re minus119875 (119895120596119888) 119876 (119895120596
119888)
) +2119903120587
120596119888
119903 = 0 1 2 infin
(11)
By substituting the polynomial of 119875(119904) and 119876(119904) given in (5)the analytical formula for computing the delaymargin ofAVRsystem is determined as
120591lowast=
1
120596119888
Tanminus1 (11988671205967
119888+ 11988651205965
119888+ 11988631205963
119888+ 1198861120596119888
11988681205968119888+ 11988661205966119888+ 11988641205964119888+ 11988621205962119888+ 1198860
)
+2119903120587
120596119888
119903 = 0 1 2 infin
(12)
where the coefficients 119886119894 119894 = 0 1 8 are real-valued and
given in the AppendixFor the positive roots of (10) we also need to check if
at 119904 = 119895120596119888 the root of (4) crosses the imaginary axis with
increasing 120591This can be determined by the sign of Re[119889119904119889120591]The necessary condition for the existence of roots crossingthe imaginary axis is that the critical characteristic rootscross the imaginary axis with nonzero velocity (transversalitycondition) that is
Re [ 119889119904
119889120591]
119904=119895120596119888
= 0 (13)
where Re(sdot) denotes the real part of a complex variable Thesign of root sensitivity is defined as root tendency (RT)
RT|119904=119895120596119888
= sgnRe [ 119889119904
119889120591]
119904=119895120596119888
(14)
By taking the derivative of (4) with respect to 120591 and noticingthat 119904 is an explicit function of 120591 we obtain
119889119904
119889120591=
119876 (119904) 119904119890minus119904120591
1198751015840 (119904) + 1198761015840 (119904) 119890minus119904120591 minus 119876 (119904) 120591119890minus119904120591 (15)
where 1198751015840(119904) and 119876
1015840(119904) denote the first-order derivatives of
119875(119904) and119876(119904)with respect to 119904 respectively Using (4) we canrewrite this expression as
119889119904
119889120591= minus119904[
1198751015840(119904)
119875 (119904)minus
1198761015840(119904)
119876 (119904)+ 120591]
minus1
(16)
We can get the corresponding root tendency by evaluating(16) at 119904 = 119895120596
119888
RT|119904=119895120596119888
= minus sgn[Re(119895120596119888(1198751015840(119895120596119888)
119875(119895120596119888)minus
1198761015840(119895120596119888)
119876(119895120596119888)+ 120591)
minus1
)]
= minus sgn[Re( 1
119895120596119888
(1198751015840(119895120596119888)
119875 (119895120596119888)
minus1198761015840(119895120596119888)
119876 (119895120596119888)
+ 120591))]
= sgn[Im(1
120596119888
(1198761015840(119895120596119888)
119876 (119895120596119888)
minus1198751015840(119895120596119888)
119875 (119895120596119888)))]
(17)
Itmust be noted that the root tendency is independent of timedelay 120591 This implies that even though there are an infinitenumber of values of 120591 associated with each value of 120596
119888that
makes Δ(119895120596119888 120591) = 0 the behavior of the roots at these points
will always be the same It can be easily shown by furthersimplifications of (17) that RT information can be deducedtrivially from the polynomial 119882(120596
2
119888) in (10) Recalling that
119904 = 119895120596119888 we have 119882(120596
2
119888) = 0 Then from (9) we have
119876(119895120596119888) = 119875(119895120596
119888)119875(minus119895120596
119888)119876(minus119895120596
119888) Thus
RT|119904=119895120596119888
= sgn[Im(1
120596119888
(1198761015840(119895120596119888) 119876 (minus119895120596
119888)
119875 (119895120596119888) 119875 (minus119895120596
119888)
minus1198751015840(119895120596119888)
119875 (119895120596119888)))]
= sgn[Im(1
120596119888
(1198761015840(119895120596119888) 119876 (minus119895120596
119888)minus1198751015840(119895120596119888) 119875 (minus119895120596
119888)
119875 (119895120596119888) 119875 (minus119895120596
119888)
))]
= sgn [Im(1
120596119888
(1198761015840(119895120596119888) 119876 (minus119895120596
119888) minus 1198751015840(119895120596119888) 119875 (minus119895120596
119888)))]
(18)
6 Mathematical Problems in Engineering
since 119875(119895120596119888)119875(minus119895120596
119888) = |119875(119895120596
119888)|2
gt 0 Finally using theproperty Im(119911) = (119911 minus 119911)2119895 for any complex number 119911 wehave
RT|119904=119895120596119888
= sgn 1
2119895120596119888
times [(1198761015840(119895120596119888) 119876 (minus119895120596
119888) minus 119876 (119895120596
119888) 1198761015840(minus119895120596119888)
minus1198751015840(119895120596119888) 119875 (minus119895120596
119888) + 119875 (119895120596
119888) 1198751015840(minus119895120596119888))]
(19)
which finally leads us to
RT|119904=119895120596119888
= sgn [1198821015840(1205962
119888)] (20)
where the prime represents differentiation with respect to1205962
119888
The evaluation of the root sensitivities with respect to thetime delay is unique feature of the proposed method Thisexpression gives a simple criterion to determine the directionof transition of the roots at 119904 = 119895120596
119888as 120591 increases from
1205911
= 120591lowastminus Δ120591 to 120591
2= 120591lowast+ Δ120591 0 lt Δ120591 ≪ 1 as shown in
Figure 3The root 119904 = 119895120596119888crosses the imaginary axis either to
unstable right half plane when RT = +1 or to stable left halfplane when RT = minus1
For the excitation control system the root tendency foreach crossing frequency could be easily determined by thefollowing expression obtained by taking the derivative of thepolynomial given in (10) with respect to 120596
2
119888
RT|119904=119895120596119888
= 61199051212059610
119888+ 5119905101205968
119888+ 411990581205966
119888
+ 311990561205964
119888+ 211990541205962
119888+ 1199052
(21)
Itmust be noted here that the polynomial of (10)mayhavemultiple but finite number of positive real roots for all 120591 isin
R+ Let us call this set
120596119888 = 120596
1198881 1205961198882 120596
119888q (22)
This finite number 119902 is influenced not only by the systemorder but also by the coefficients of polynomials 119875(119904) and119876(119904) Furthermore for each 120596
119888119898 119898 = 1 2 119902 we can get
infinitely many periodically spaced 120591lowast
119898values by using (12)
Let us call this set
120591lowast
119898 = 120591
lowast
1198981 120591lowast
1198982 120591
lowast
119898infin 119898 = 1 2 119902 (23)
where 120591119898119903+1
minus 120591119898119903
= 2120587120596119888is the apparent period of
repetition According to the definition of delay margin theminimum of 120591
lowast
119898 119898 = 1 2 119902 will be the system delay
margin
120591lowast= min (120591
lowast
119898) (24)
4 Results and Discussion
41 Theoretical Results In this section the delay margin 120591lowast
for stability for awide range of PI controller gains is computedusing the expression given in (12) Theoretical delay margin
results are verified by using MatlabSimulink The gains andtime constants of the exciter control system used in theanalysis are as follows
119879119860= 01 s 119879
119864= 04 s 119879
119866= 10 s
119879119877= 005 s 119879
119865= 004 s
119870119860= 5 119870
119864= 119870119866= 119870119877= 10 119870
119865= 20
(25)
First we choose typical PI controller gains119870119875= 07 119870
119868=
08 sminus1 to demonstrate the delay margin computation Theprocess of the delay margin computation consists of thefollowing four steps
Step 1 Determine the characteristic equation of time-delayedexcitation control system using (4) and (5) This equation isfound to be
Δ (119904 120591) = (8 times 10minus51199046+ 00047119904
5+ 04416119904
4
+ 78171199043+ 1699119904
2+ 90119904)
+ (0141199042+ 366119904 + 4) 119890
minus119904120591= 0
(26)
Note that for 120591 = 0 the characteristic equation of the delay-free system has roots at 119904
12= minus19035 plusmn 11989565838 119904
34=
minus0501 plusmn 11989504095 1199045
= minus180155 1199046
= minus14121 whichindicates that the delay-free system is stable
Step 2 Construct the119882(1205962
119888)polynomial using (10) and com-
pute its real positive roots 120596119888119898 if they exist The polynomial
is computed as
119882(1205962
119888) = 64 times 10
minus912059612
119888minus 48754 times 10
minus512059610
119888+ 01189120596
8
119888
+ 5609301205966
119888+ 1369545120596
4
119888+ 687244120596
2
119888
minus 16 = 0
(27)
It is found that this polynomial has only one positive real rootThis positive real root is found to be 120596
119888= 04131 rads
Step 3 Compute the delay margin for each positive rootfound in Step 2 using (12) and select the minimum of those asthe system delaymargin for this PI controller gainsThe delaymargin is computed as 120591lowast = 28760 s
Step 4 Determine the root tendency (RT) for each positiveroot120596
119888119898using (21)TheRT for120596
119888= 04131 rads is computed
as RT = +1 This RT indicates that a pair of complex rootspasses from stable half plane to unstable half plane crossing119895120596-axis 119904 = plusmn11989504131 rads for 120591lowast = 28760 s and the systembecomes unstable
For the theoretical analysis the effect of PI controllergains on the delay margin is also investigated Table 1shows delay margins of the AVR system with a stabilizingtransformer for the range of 119870
119875= 03ndash07 and 119870
119868= 01ndash
10 sminus1 It is clear from Table 1 that the delay margin decreases
Mathematical Problems in Engineering 7
Table 1 Delay margins 120591lowast for different values of 119870119868and 119870
119875of the
AVR system with a stabilizing transformer
119870119868(sminus1) 120591
lowast (s)119870119875= 03 119870
119875= 05 119870
119875= 07
01 54172 44662 3810802 40532 39038 3651503 35181 35078 3423404 32443 32645 3240305 30813 31073 3105906 29745 29996 3007107 28997 29223 2933008 28446 28645 2876009 28026 28199 2831210 27694 27846 27952
as the integral gain increases when 119870119875is fixed In order to
find out the quantitative impact of the stabilizing transformeron the delay margin delay margins are also obtained for thecase in which a stabilizing transformer is not used in the AVRsystem [29] Table 2 shows delay margins of the AVR systemwithout a stabilizing transformer It is clear from Tables 1and 2 that compensation of the AVR system by a stabilizingtransformer significantly increases the delay margins for allvalues of PI controller gains which makes the AVR systemmore stable For example for 119870
119875= 07 and 119870
119868= 08 sminus1 the
delay margin when a stabilizing transformer is not includedis found to be 120591
lowast= 01554 s while it is 120591
lowast= 28760 s
when a stabilizing transformer is included This is obviouslya significant improvement in the stability performance of theAVR system This observation is valid for all values of PIcontroller gains as indicated in Tables 1 and 2
42 Verification of Theoretical Delay Margin Results Mat-labSimulink is used to verify the theoretical results on thedelaymargin and to illustrate how the stabilizing transformerdamps the oscillations in the presence of time delays For theillustrative purpose PI controller gains are chosen as 119870
119875=
07 and 119870119868= 08 sminus1 From Table 1 for these gains the delay
margin is found to be 120591lowast
= 28760 s when the stabilizingtransformer is included Simulation result for this delay valueis shown in Figure 4(a) It is clear that sustained oscillationsare observed indicating a marginally stable operation Whenthe time delay is less than the delay margin it is expected thatthe exciter systemwill be stable Figure 4(a) also shows such asimulation result for 120591 = 274 s Similarly when the time delayis larger than the delay margin the system will have growingoscillations indicating an unstable operation as illustratedin Figure 4(a) for 120591 = 30 s These simulation results showthat the theoretical method correctly estimates the delaymargin of the AVR system compensated by a stabilizingtransformer Moreover the voltage response of the AVRsystem not including a stabilizing transformer is presentedin Figure 4(b) indicating the same type of dynamic behavior
Table 2 Delay margins 120591lowast for different values of 119870119868and 119870
119875of the
AVR system without a stabilizing transformer
119870119868(sminus1) 120591
lowast (s)119870119875= 03 119870
119875= 05 119870
119875= 07
01 14164 06275 0365202 09700 05471 0334903 06781 04665 0303704 04831 03912 0272205 03459 03235 0241106 02447 02639 0211107 01674 02118 0182508 01066 01664 0155409 00576 01267 0130010 00174 00920 01063
as the AVR system including a stabilizing transformer with asmaller delay margin (120591lowast = 01554 s)
The damping effect of the stabilizing transformer couldbe easily illustrated by time-domain simulations Figure 5(a)compares the voltage response of the AVR system with andwithout a stabilizing transformer for 120591lowast = 01554 s It is clearthat theAVR systemnot including the stabilizing transformeris marginally stable or on the stability boundary havingsustained oscillations while the AVR system compensated bya stabilizing transformer has a response with quickly dampedoscillations Similarly Figure 5(b) shows the voltage responseof the AVR system with and without the stabilizing trans-former for 120591 = 017 s When the stabilizing transformer isnot considered the system is unstable since 120591 = 017 s gt 120591
lowast=
01554 s and growing oscillations are observed However theaddition of the stabilizing transformer damps the oscillationsand makes the excitation control system stable
5 Conclusions
This paper has proposed an exact method to compute thedelay margin for stability of the AVR system including astabilizing transformer The method first eliminates the tran-scendental term in the characteristic equation without usingany approximation The resulting augmented equation hasbecome a regular polynomial whose real roots coincide withthe imaginary roots of the characteristic equation exactlyAn expression in terms of system parameters and imaginaryroots of the characteristic equation has been derived forcomputing the delay margin Moreover using the augmentedequation a simple root sensitivity test has been developed todetermine the direction of the root transition
The effect of PI controller gains on the delay marginhas been investigated The theoretical results indicate thatthe delay margin decreases as the integral gain increasesfor a given proportional gain Such a decrease in delaymargin implies a less stable AVR system Moreover it hasbeen observed that the compensation of the AVR systemwith a stabilizing transformer remarkably increases the delay
8 Mathematical Problems in Engineering
0 20 40 60 80 100
0
05
1
15
2
25
3
Time (s)
minus1
minus05
120591 = 274
120591 = 3
120591 = 2876
Gen
erat
or te
rmin
al v
olta
geVt
(pu)
(a)
0 2 4 6 8 10 12 14 16 18 20
0
05
1
15
2
25
3
Time (s)
minus1
minus05
120591 = 01554
120591 = 0 14
120591 = 017
Gen
erat
or te
rmin
al v
olta
geVt
(pu)
(b)
Figure 4 Voltage response of the AVR system for 119870119875= 07 and 119870
119868= 08 sminus1 (a) with a stabilizing transformer and 120591 = 274 2876 and 30 s
and (b) without a stabilizing transformer and 120591 = 014 01554 and 017 s
0 2 4 6 8 10 12 14 16 18 20
0
05
1
15
2
25
Time (s)
Without a stabilizing transformerWith a stabilizing transformer
minus05
Gen
erat
or te
rmin
al v
olta
geVt
(pu)
(a)
0 2 4 6 8 10 12 14 16 18 20
0
05
1
15
2
25
3
Time (s)
minus1
minus05Gen
erat
or te
rmin
al v
olta
geVt
(pu)
Without a stabilizing transformerWith a stabilizing transformer
(b)
Figure 5 Voltage response of the AVR system with and without a stabilizing transformer for 119870119875= 07 and 119870
119868= 08 sminus1 (a) 120591 = 01554 s (b)
120591 = 017 s
margin of the system which indicates a more stable AVRsystem
Theoretical delay margin results have been verified bycarrying out simulation studies It has been observed thatthe proposed method correctly estimates the delay margin ofthe AVR system Additionally with the help of simulations ithas been shown that the stabilizing transformer significantlyimproves the system dynamic performance by damping theoscillations
With the help of the results presented controller gainscould be properly selected such that the excitation controlsystem will be stable and will have a desired dampingperformance even if certain amount of time delays exists inthe system
The following studies have been put in perspective asfuture work (i) the extension of the proposed methodinto multimachine power systems with commensurate timedelays (ii) the influence of power system stabilizer (PSS)
Mathematical Problems in Engineering 9
on the delay margin and (iii) the probabilistic evaluation ofdelay margin as to take into account random nature of timedelays
Appendix
The coefficients of polynomials 119875(119904) and 119876(119904) given in (5) interms of gains and time constants of the AVR system
1199016= 119879119860119879119864119879119865119879119866119879119877
1199015= 119879119860119879119864119879119865119879119866
+ 119879119877(119879119860119879119864119879119865+ 119879119860119879119864119879119866+ 119879119860119879119865119879119866+ 119879119864119879119865119879119866)
1199014= 119879119860119879119864119879119865+ 119879119860119879119864119879119866+ 119879119860119879119865119879119866+ 119879119864119879119865119879119866
+ 119879119877(119879119860119879119864+ 119879119860119879119865+ 119879119864119879119865+ 119879119860119879119866+ 119879119864119879119866
+119879119865119879119866+ 119870119860119870119864119870119875119870119865119879119866)
1199013= 119879119860119879119864+ 119879119860119879119865+ 119879119864119879119865+ 119879119860119879119866+ 119879119864119879119866
+ 119879119865119879119866+ 119870119860119870119864119870119875119870119865119879119866
+ 119879119877(119879119860+ 119879119864+ 119879119865+ 119870119860119870119864119870119875119870119865
+119870119860119870119864119870119868119870119865119879119866+ 119879119866)
1199012= 119879119860+ 119879119864+ 119879119865+ 119870119860119870119864119870119875119870119865+ 119870119860119870119864119870119868119870119865119879119866+ 119879119866
+ 119879119877(119870119860119870119864119870119868119870119865+ 1)
1199011= 1 + 119870
119860119870119864119870119868119870119865
1199022= 119870119860119870119864119870119875119870119866119870119877119879119865
1199021= 119870119860119870119864119870119866119870119877(119870119875+ 119870119868119879119865)
1199020= 119870119860119870119864119870119868119870119866119870119877
(A1)
The coefficients of the polynomial119882(1205962
119888) given in (10)
11990512
= 1199012
6 119905
10= 1199012
5minus 211990141199016
1199058= 1199012
4minus 211990131199015+ 211990121199016
1199056= 1199012
3minus 211990121199014+ 211990111199015
1199054= 1199012
2minus 211990111199013minus 1199022
2
1199052= 1199012
1minus 1199022
1+ 211990201199022 119905
0= minus1199022
0
(A2)
The coefficients of the analytical formula given in (12)
1198868= minus11990161199022 119886
7= 11990161199021minus 11990151199022
1198866= 11990141199022+ 11990161199020minus 11990151199021
1198865= minus11990141199021+ 11990131199022+ 11990151199020
1198864= minus11990121199022minus 11990141199020+ 11990131199021
1198863= 11990121199021minus 11990111199022minus 11990131199020
1198862= 11990121199020minus 11990111199021
1198861= 11990111199020 119886
0= 0
(A3)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] P Kundur Power System Stability and Control McGraw-HillNew York NY USA 1994
[2] IEEE Standard 4215 IEEE Recommended Practice for ExcitationSystem Models for Power System Stability Studies IEEE PowerEngineering Society 2005
[3] A G Phadke ldquoSynchronized phasor measurements in powersystemsrdquo IEEE Computer Applications in Power vol 6 no 2 pp10ndash15 1993
[4] B Naduvathuparambil M C Venti and A Feliachi ldquoCom-munication delays in wide area measurement systemsrdquo inProceedings of the 34th Southeastern Symposium on SystemTheory vol 1 pp 118ndash122 University of Alabama March 2002
[5] S Bhowmik K Tomsovic and A Bose ldquoCommunicationmod-els for third party load frequency controlrdquo IEEE Transactions onPower Systems vol 19 no 1 pp 543ndash548 2004
[6] M Liu L Yang D Gan D Wang F Gao and Y Chen ldquoThestability of AGC systems with commensurate delaysrdquo EuropeanTransactions on Electrical Power vol 17 no 6 pp 615ndash627 2007
[7] H Wu K S Tsakalis and G T Heydt ldquoEvaluation of timedelay effects to wide area power system stabilizer designrdquo IEEETransactions on Power Systems vol 19 no 4 pp 1935ndash19412004
[8] X Yu and K Tomsovic ldquoApplication of linear matrix inequal-ities for load frequency control with communication delaysrdquoIEEETransactions on Power Systems vol 19 no 3 pp 1508ndash15152004
[9] L Jiang W Yao Q H Wu J Y Wen and S J Cheng ldquoDelay-dependent stability for load frequency control with constantand time-varying delaysrdquo IEEE Transactions on Power Systemsvol 27 no 2 pp 932ndash941 2012
[10] J Quanyuan Z Zhenyu and C Yijia ldquoWide-area TCSCcontroller design in consideration of feedback signalsrsquo timedelaysrdquo in Proceedings of the IEEE Power Engineering SocietyGeneralMeeting pp 1676ndash1680 San Francisco Calif USA June2005
[11] J Luque J I Escudero and F Perez ldquoAnalytic model of themeasurement errors caused by communications delayrdquo IEEETransactions on Power Delivery vol 17 no 2 pp 334ndash337 2002
[12] S P Carullo and C O Nwankpa ldquoExperimental validation ofa model for an information-embedded power systemrdquo IEEETransactions on Power Delivery vol 20 no 3 pp 1853ndash18632005
10 Mathematical Problems in Engineering
[13] C-W Park and W-H Kwon ldquoTime-delay compensation forinduction motor vector control systemrdquo Electric Power SystemsResearch vol 68 no 3 pp 238ndash247 2004
[14] H Okuno and T Fujii ldquoDelayed feedback controlled powersystemrdquo in Proceedings of the SICE Annual Conference pp2659ndash2663 August 2005
[15] H-K Chen T-N Lin and J-H Chen ldquoDynamic analysiscontrolling chaos and chaotification of a SMIB power systemrdquoChaos Solitons and Fractals vol 24 no 5 pp 1307ndash1315 2005
[16] H Jia X Yu Y Yu and C Wang ldquoPower system smallsignal stability region with time delayrdquo International Journal ofElectrical Power and Energy Systems vol 30 no 1 pp 16ndash222008
[17] S Ayasun ldquoComputation of time delay margin for power sys-tem small-signal stabilityrdquo European Transactions on ElectricalPower vol 19 no 7 pp 949ndash968 2009
[18] J Chen G Gu and C N Nett ldquoA new method for computingdelay margins for stability of linear delay systemsrdquo Systems andControl Letters vol 26 no 2 pp 107ndash117 1995
[19] K Gu V L Kharitonov and J Chen Stability of Time DelaySystems Birkhaauser Boston Mass USA 2003
[20] P Fu S-I Niculescu and J Chen ldquoStability of linear neutraltime-delay systems exact conditions via matrix pencil solu-tionsrdquo IEEE Transactions on Automatic Control vol 51 no 6pp 1063ndash1069 2006
[21] K Walton and J E Marshall ldquoDirect method for TDS stabilityanalysisrdquo IEE Proceedings D Control Theory and Applicationsvol 134 no 2 pp 101ndash107 1987
[22] J-H Su ldquoAsymptotic stability of linear autonomous systemswith commensurate time delaysrdquo IEEE Transactions on Auto-matic Control vol 40 no 6 pp 1114ndash1117 1995
[23] J Louisell ldquoAmatrixmethod for determining the imaginary axiseigenvalues of a delay systemrdquo IEEE Transactions on AutomaticControl vol 46 no 12 pp 2008ndash2012 2001
[24] Z V Rekasius ldquoA stability test for systems with delaysrdquo inProceedings of Joint Automatic Control Conference paper noTP9-A 1980
[25] N Olgac and R Sipahi ldquoAn exact method for the stabilityanalysis of time-delayed linear time-invariant (LTI) systemsrdquoIEEE Transactions on Automatic Control vol 47 no 5 pp 793ndash797 2002
[26] H Fazelinia R Sipahi and N Olgac ldquoStability robustness anal-ysis of multiple time-delayed systems using ldquobuilding blockrdquoconceptrdquo IEEE Transactions on Automatic Control vol 52 no5 pp 799ndash810 2007
[27] R Sipahi and N Olgac ldquoA comparative survey in determiningthe imaginary characteristic roots of LTI time delayed systemsrdquoin Proceedings of the 16th IFAC World Congress vol 16 p 635Prague Czech Republic July 2005
[28] MATLAB High-Performance Numeric Computation and Visu-alization Software The Mathworks Natick Mass USA 2001
[29] S Ayasun and A Gelen ldquoStability analysis of a generator exci-tation control system with time delaysrdquo Electrical Engineeringvol 91 no 6 pp 347ndash355 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
Rectifier
Potentialtransformers
Stabilizingtransformer
Regu
lato
r
G
+ +
_
Synchronousgenerator
Exciter
To the restof the system
i
+
Voltage (sensing)transducer
Phasormeasurement unit
eR
minusminus
minus
ifVa
f
ΔPΔQ
dc ac
ref
Figure 1 The schematic block diagram of the generator excitation control system
of time delays The PMUs are units that measure dynamicdata of power systems such as voltage current angle andfrequency using the discrete Fourier transform (DFT) [3]The use of PMUs introduces the measurement delays thatconsist of voltage transducer delay and processing delay Theprocessing delay is the amount of time required in convertingtransducer data into phasor informationwith the help ofDFT
In power systems various communication links used fordata transfer include both wired options such as telephonelines fiber-optic cables and power lines and wireless optionssuch as satellites [4] In power system control the totalmeasurement delay is reported to be in the order of millisec-onds Depending on the communication link used the totalcommunication delay is considered to be in the range of 100ndash700ms Measurement and communication delays involvedbetween the instant of measurement and that of signal beingavailable to the controller are themajor problem in the powersystem control This delay can typically be in the range of05ndash10 s [4ndash6] Another processing delay in the order ofmilliseconds is observedwhen adigital PI controller is used inthe regulator located in the feed-forward section of the AVRshown in Figure 1
The inevitable time delays in power systems have a desta-bilizing impact reduce the effectiveness of control systemdamping and lead to unacceptable performance such as lossof synchronism and instability Therefore stability analysisand controller design methods must take into account largetime delays and practical tools should be developed to studythe complicated dynamic behavior of time-delayed powersystems Specifically such tools should estimate the maxi-mum amount of time delay that the system could toleratewithout becoming unstable Such knowledge on the delaymargin (upper bound in the time delay) could also be helpfulin the controller design for cases where uncertainty in thedelay is unavoidable
The previous studies on the dynamics of time-delayedpower systems have mainly focused on the following issues(i) to investigate the time-delay influence on the controllerdesign for power system stabilizers (PSSs) [7] for loadfrequency control (LFC) [8 9] and for thyristor-controlled
series compensator (TCSC) [10] (ii) to determine andanalyze the cause of time delays and to find appropriatemethods to reduce their adverse effects [11ndash13] (iii) toeliminate periodic and chaotic oscillations in power systemsby applying time-delayed feedback control [14 15] (iv) toestimate the delay margin for small-signal stability of time-delayed power systems [16 17] However less attention hasbeen paid to the effects of time delays on the stability ofgenerator excitation control systems including a stabilizingtransformer
There are several methods in the literature to com-pute delay margins of general time-delayed systems Thecommon starting point of them is the determination ofall the imaginary roots of the characteristic equation Theexisting procedures can be classified into the followingfive distinguishable approaches (i) Schur-Cohn (Hermitematrix formation) [18ndash20] (ii) elimination of transcendentalterms in the characteristic equation [21] (iii) matrix pencilKronecker sum method [18ndash20 22] (iv) Kronecker multi-plication and elementary transformation [23] (v) Rekasiussubstitution [24ndash26] These methods demand numericalprocedures of different complexity and they may result indifferent precisions in computing imaginary roots A detailedcomparison of these methods demonstrating their strengthsand weakness can be found in [27]
This paper presents a direct approach based on themethod reported in [21] to compute the delay margin forstability of excitation control system including a stabilizingtransformer The proposed method is an analytically elegantprocedure that first converts the transcendental characteristicequation into a polynomial without the transcendentalityThis procedure does not use any approximation or substitu-tion to eliminate the transcendentality of the characteristicequation Therefore it is exact and the real roots of the newpolynomial coincide with the imaginary roots of the char-acteristic equation exactly The resulting polynomial withoutthe transcendentality also enables us to easily determine thedelay dependency of the system stability and the sensitivitiesof crossing roots (root tendency) with respect to the timedelay This is a remarkable feature of the proposed method
Mathematical Problems in Engineering 3
Amplifier Exciter Generator
Sensor and rectifier
PI controller
Measurement and communication
signal delay
+
Stabilizingtransformer
Vref(s)
minus
VE(s)GC(s) = KP +
KI
sGA(s) =
KA
1 + TAs
VR(s)
GF(s) =KFs
1 + TFs
eminuss120591
GE(s) =KE
1 + TEs
VF(s)GG(s) =
KG
1 + TGs
VT(s)
VS(s)GR(s) =
KR
1 + TRs
Figure 2 Block diagram of the excitation control system with a stabilizing transformer and time delay
Then an easy-to-use formula is derived to determine thedelay margin in terms of system parameters and imaginaryroots of the characteristic equation which is the maincontribution of the paper
In this work delay margins are first theoretically deter-mined for a wide range of PI controller gains Then theoret-ical delay margin results are verified by using time-domainsimulation capabilities of MatlabSimulink [28] Moreoverdelay margin results of the excitation control system with astabilizing transformer are compared with those of the exci-tation control system not including a stabilizing transformerIt is observed that the compensation of the excitation systemwith a stabilizing transformer increases the delay margin ofthe system (thus the stability margin) and provides signifi-cant amount of damping to system oscillations enhancing theclosed-loop stability of the time-delayed excitation controlsystem
2 AVR System Model with Time Delayand Stability
21 AVR System Model with Time Delay For load frequencycontrol and excitation control systems linear or linearizedmodels are commonly used to analyze the system dynamicsand to design a controller Figure 2 shows the block diagramof a generator excitation control system including a timedelay Note that each component of the system namelyamplifier exciter generator sensor and rectifier is modeledby a first-order transfer function [1 2] The transfer functionof each component is given below
119866119860 (119904) =
119870119860
1 + 119879119860119904 119866
119864 (119904) =119870119864
1 + 119879119864119904
119866119866 (119904) =
119870119866
1 + 119879119866119904 119866
119877 (119904) =119870119877
1 + 119879119877119904
(1)
where 119870119860 119870119864 119870119866 and 119870
119877are the gains of amplifier exciter
generator and sensor respectively and119879119860119879119864119879119866 and119879
119877are
the corresponding time constants
Note that as illustrated in Figure 2 using an exponentialterm the total of measurement and communication delays(120591) is placed in the feedback part of the excitation controlsystem Moreover a stabilizing transformer is introduced inthe system by adding a derivative feedback to the control sys-tem to improve the dynamic performance [2]The stabilizingtransformer will add a zero to the AVR open-loop transferfunction and thus will increase the relative stability of theclosed-loop system The transfer function of the stabilizingtransformer is given as follows
119866119865 (119904) =
119870119865119904
1 + 119904119879119865
(2)
where119870119865and 119879
119865are the gain and time constant respectively
The transfer function of the PI controller is described as
119866119888 (119904) = 119870
119875+
119870119868
119904 (3)
where 119870119875and 119870
119868are the proportional and integral gains
respectively The proportional term affects the rate of voltagerise after a step changeThe integral term affects the generatorvoltage settling time after initial voltage overshoot The inte-gral controller adds a pole at origin and increases the systemtype by one and reduces the steady-state errorThe combinedeffect of the PI controller will shape the response of thegenerator excitation system to reach the desired performance
22 Stability The characteristic equation of the excitationcontrol system can be easily obtained as
Δ (119904 120591) = 119875 (119904) + 119876 (119904) 119890minus119904120591
= 0 (4)
where119875(119904) and119876(119904) are polynomials in 119904with real coefficientsgiven below
119875 (119904) = 11990161199046+ 11990151199045+ 11990141199044+ 11990131199043+ 11990121199042+ 1199011119904
119876 (119904) = 11990221199042+ 1199021119904 + 1199020
(5)
The coefficients of these polynomials in terms of gains andtime constants are given in the Appendix
4 Mathematical Problems in Engineering
Stable region Unstable regionj120596
120591 = 0
120591 = 0
1205911 120591lowast 1205912
1205911 = 120591lowast minus Δ1205911205912 = 120591lowast + Δ120591
minusj120596c
j120596c
120590
1205911 lt 120591lowast lt 1205912
Figure 3 Illustration of the movement of the characteristic roots with respect to time delay
The main goal of the stability studies of time-delayedsystems is to determine conditions on the delay for any givenset of system parameters that will guarantee the stability ofthe system As with the delay-free system (ie 120591 = 0) thestability of the AVR system depends on the locations of theroots of systemrsquos characteristic equation defined by (4) It isobvious that the roots of (4) are a function of the time delay120591 As 120591 changes location of some of the roots may changeFor the system to be asymptotically stable all the roots of thecharacteristic equation of (4) must lie in the left half of thecomplex plane That is
Δ (119904 120591) = 0 forall119904 isin 119862+ (6)
where119862+ represents the right half plane of the complex planeDepending on system parameters there are two differentpossible types of asymptotic stability situations due to thetime delay 120591 [19 21]
(i) Delay-independent stability the characteristic equa-tion of (4) is said to be delay-independent stable ifthe stability condition of (6) holds for all positive andfinite values of the delay 120591 isin [0infin)
(ii) Delay-dependent stability the characteristic equationof (4) is said to be delay-dependent stable if thecondition of (6) holds for some values of delaysbelonging in the delay interval 120591 isin [0 120591
lowast) and is
violated for other values of delay 120591 ge 120591lowast
In the delay-dependent case the roots of the characteris-tic equations move as the time delay 120591 increases starting from120591 = 0 Figure 3 illustrates the movement of the roots Notethat the delay-free system (120591 = 0) is assumed to be stableThis is a realistic assumption since for the practical valuesof system parameters the excitation control system is stablewhen the total delay is neglected Observe that as the timedelay 120591 is increased a pair of complex eigenvalues moves inthe left half of the complex plane For a finite value of 120591 gt 0they cross the imaginary axis and pass to the right half planeThe time delay value 120591
lowast at which the characteristic equationhas purely imaginary eigenvalues is the upper bound on the
delay size or the delay margin for which the system willbe stable for any given delay less or equal to this bound120591 le 120591
lowast In order to characterize the stability property of (4)completely we first need to determine whether the system forany given set of parameters is delay-independent stable or notand if not to determine the delay margin 120591
lowast for a wide rangeof system parameters In the following section we present apractical approach that gives a criterion for evaluating thedelay dependency of stability and an analytical formula tocompute the delay margin for the delay-dependent case
3 Delay Margin Computation
A necessary and sufficient condition for the system to beasymptotically stable is that all the roots of the characteristicequation of (4) lie in the left half of the complex plane Inthe single delay case the problem is to find values of 120591lowast forwhich the characteristic equation of (4) has roots (if any) onthe imaginary axis of the s-plane Clearly Δ(s 120591) = 0 is animplicit function of 119904 and 120591 which may or may not cross theimaginary axis Assume for simplicity that Δ(119904 0) = 0 has allits roots in the left half plane That is the delay-free system isstable If for some 120591 Δ(119904 120591) = 0 has a root on the imaginaryaxis at 119904 = 119895120596
119888 so does Δ(minus119904 120591) = 0 for the same value
of 120591 and 120596119888because of the complex conjugate symmetry of
complex roots Therefore looking for roots on the imaginaryaxis reduces to finding values of 120591 for which Δ(119904 120591) = 0 andΔ(minus119904 120591) = 0 have a common root [21] That is
119875 (119904) + 119876 (119904) 119890minus119904120591
= 0
119875 (minus119904) + 119876 (minus119904) 119890119904120591
= 0
(7)
By eliminating exponential terms in (7) we get the followingpolynomial
119875 (119904) 119875 (minus119904) minus 119876 (119904) 119876 (minus119904) = 0 (8)
If we replace 119904 by 119895120596119888in (8) we have the polynomial in 120596
2
119888
given below
119882(1205962
119888) = 119875 (119895120596
119888) 119875 (minus119895120596
119888) minus 119876 (119895120596
119888) 119876 (minus119895120596
119888) = 0 (9)
Mathematical Problems in Engineering 5
Substituting 119875(119904) and 119876(119904) polynomials given in (5) into(9) we could obtain the following 12th order augmentedcharacteristic equation or polynomial
119882(1205962
119888) = 1199051212059612
119888+ 1199051012059610
119888+ 11990581205968
119888+ 11990561205966
119888
+ 11990541205964
119888+ 11990521205962
119888+ 1199050= 0
(10)
where the coefficients 1199050 1199052 1199054 1199056 1199058 11990510 11990512
are real-valuedand given in the Appendix
Please note that transcendental characteristic equationwith single delay given in (4) is now converted into apolynomial without the transcendentality given by (10) andits positive real roots coincide with the imaginary roots of(4) exactly The roots of this polynomial might easily bedetermined by standard methods Depending on the roots of(10) the following situation may occur
(i) The polynomial of (10) may not have any positive realroots which implies that the characteristic equationof (4) does not have any roots on the 119895120596-axis In thatcase the system is stable for all 120591 ge 0 indicating thatthe system is delay-independent stable
(ii) The polynomial of (10) may have at least one positivereal root which implies that the characteristic equa-tion of (4) has at least a pair of complex eigenvalues onthe 119895120596-axis In that case the system is delay-dependentstable
For a positive real root (120596119888) of (10) the corresponding value
of delay margin 120591lowast can be easily obtained using (7) as [21]
120591lowast=
1
120596119888
Tanminus1 (Im 119875 (119895120596
119888) 119876 (119895120596
119888)
Re minus119875 (119895120596119888) 119876 (119895120596
119888)
) +2119903120587
120596119888
119903 = 0 1 2 infin
(11)
By substituting the polynomial of 119875(119904) and 119876(119904) given in (5)the analytical formula for computing the delaymargin ofAVRsystem is determined as
120591lowast=
1
120596119888
Tanminus1 (11988671205967
119888+ 11988651205965
119888+ 11988631205963
119888+ 1198861120596119888
11988681205968119888+ 11988661205966119888+ 11988641205964119888+ 11988621205962119888+ 1198860
)
+2119903120587
120596119888
119903 = 0 1 2 infin
(12)
where the coefficients 119886119894 119894 = 0 1 8 are real-valued and
given in the AppendixFor the positive roots of (10) we also need to check if
at 119904 = 119895120596119888 the root of (4) crosses the imaginary axis with
increasing 120591This can be determined by the sign of Re[119889119904119889120591]The necessary condition for the existence of roots crossingthe imaginary axis is that the critical characteristic rootscross the imaginary axis with nonzero velocity (transversalitycondition) that is
Re [ 119889119904
119889120591]
119904=119895120596119888
= 0 (13)
where Re(sdot) denotes the real part of a complex variable Thesign of root sensitivity is defined as root tendency (RT)
RT|119904=119895120596119888
= sgnRe [ 119889119904
119889120591]
119904=119895120596119888
(14)
By taking the derivative of (4) with respect to 120591 and noticingthat 119904 is an explicit function of 120591 we obtain
119889119904
119889120591=
119876 (119904) 119904119890minus119904120591
1198751015840 (119904) + 1198761015840 (119904) 119890minus119904120591 minus 119876 (119904) 120591119890minus119904120591 (15)
where 1198751015840(119904) and 119876
1015840(119904) denote the first-order derivatives of
119875(119904) and119876(119904)with respect to 119904 respectively Using (4) we canrewrite this expression as
119889119904
119889120591= minus119904[
1198751015840(119904)
119875 (119904)minus
1198761015840(119904)
119876 (119904)+ 120591]
minus1
(16)
We can get the corresponding root tendency by evaluating(16) at 119904 = 119895120596
119888
RT|119904=119895120596119888
= minus sgn[Re(119895120596119888(1198751015840(119895120596119888)
119875(119895120596119888)minus
1198761015840(119895120596119888)
119876(119895120596119888)+ 120591)
minus1
)]
= minus sgn[Re( 1
119895120596119888
(1198751015840(119895120596119888)
119875 (119895120596119888)
minus1198761015840(119895120596119888)
119876 (119895120596119888)
+ 120591))]
= sgn[Im(1
120596119888
(1198761015840(119895120596119888)
119876 (119895120596119888)
minus1198751015840(119895120596119888)
119875 (119895120596119888)))]
(17)
Itmust be noted that the root tendency is independent of timedelay 120591 This implies that even though there are an infinitenumber of values of 120591 associated with each value of 120596
119888that
makes Δ(119895120596119888 120591) = 0 the behavior of the roots at these points
will always be the same It can be easily shown by furthersimplifications of (17) that RT information can be deducedtrivially from the polynomial 119882(120596
2
119888) in (10) Recalling that
119904 = 119895120596119888 we have 119882(120596
2
119888) = 0 Then from (9) we have
119876(119895120596119888) = 119875(119895120596
119888)119875(minus119895120596
119888)119876(minus119895120596
119888) Thus
RT|119904=119895120596119888
= sgn[Im(1
120596119888
(1198761015840(119895120596119888) 119876 (minus119895120596
119888)
119875 (119895120596119888) 119875 (minus119895120596
119888)
minus1198751015840(119895120596119888)
119875 (119895120596119888)))]
= sgn[Im(1
120596119888
(1198761015840(119895120596119888) 119876 (minus119895120596
119888)minus1198751015840(119895120596119888) 119875 (minus119895120596
119888)
119875 (119895120596119888) 119875 (minus119895120596
119888)
))]
= sgn [Im(1
120596119888
(1198761015840(119895120596119888) 119876 (minus119895120596
119888) minus 1198751015840(119895120596119888) 119875 (minus119895120596
119888)))]
(18)
6 Mathematical Problems in Engineering
since 119875(119895120596119888)119875(minus119895120596
119888) = |119875(119895120596
119888)|2
gt 0 Finally using theproperty Im(119911) = (119911 minus 119911)2119895 for any complex number 119911 wehave
RT|119904=119895120596119888
= sgn 1
2119895120596119888
times [(1198761015840(119895120596119888) 119876 (minus119895120596
119888) minus 119876 (119895120596
119888) 1198761015840(minus119895120596119888)
minus1198751015840(119895120596119888) 119875 (minus119895120596
119888) + 119875 (119895120596
119888) 1198751015840(minus119895120596119888))]
(19)
which finally leads us to
RT|119904=119895120596119888
= sgn [1198821015840(1205962
119888)] (20)
where the prime represents differentiation with respect to1205962
119888
The evaluation of the root sensitivities with respect to thetime delay is unique feature of the proposed method Thisexpression gives a simple criterion to determine the directionof transition of the roots at 119904 = 119895120596
119888as 120591 increases from
1205911
= 120591lowastminus Δ120591 to 120591
2= 120591lowast+ Δ120591 0 lt Δ120591 ≪ 1 as shown in
Figure 3The root 119904 = 119895120596119888crosses the imaginary axis either to
unstable right half plane when RT = +1 or to stable left halfplane when RT = minus1
For the excitation control system the root tendency foreach crossing frequency could be easily determined by thefollowing expression obtained by taking the derivative of thepolynomial given in (10) with respect to 120596
2
119888
RT|119904=119895120596119888
= 61199051212059610
119888+ 5119905101205968
119888+ 411990581205966
119888
+ 311990561205964
119888+ 211990541205962
119888+ 1199052
(21)
Itmust be noted here that the polynomial of (10)mayhavemultiple but finite number of positive real roots for all 120591 isin
R+ Let us call this set
120596119888 = 120596
1198881 1205961198882 120596
119888q (22)
This finite number 119902 is influenced not only by the systemorder but also by the coefficients of polynomials 119875(119904) and119876(119904) Furthermore for each 120596
119888119898 119898 = 1 2 119902 we can get
infinitely many periodically spaced 120591lowast
119898values by using (12)
Let us call this set
120591lowast
119898 = 120591
lowast
1198981 120591lowast
1198982 120591
lowast
119898infin 119898 = 1 2 119902 (23)
where 120591119898119903+1
minus 120591119898119903
= 2120587120596119888is the apparent period of
repetition According to the definition of delay margin theminimum of 120591
lowast
119898 119898 = 1 2 119902 will be the system delay
margin
120591lowast= min (120591
lowast
119898) (24)
4 Results and Discussion
41 Theoretical Results In this section the delay margin 120591lowast
for stability for awide range of PI controller gains is computedusing the expression given in (12) Theoretical delay margin
results are verified by using MatlabSimulink The gains andtime constants of the exciter control system used in theanalysis are as follows
119879119860= 01 s 119879
119864= 04 s 119879
119866= 10 s
119879119877= 005 s 119879
119865= 004 s
119870119860= 5 119870
119864= 119870119866= 119870119877= 10 119870
119865= 20
(25)
First we choose typical PI controller gains119870119875= 07 119870
119868=
08 sminus1 to demonstrate the delay margin computation Theprocess of the delay margin computation consists of thefollowing four steps
Step 1 Determine the characteristic equation of time-delayedexcitation control system using (4) and (5) This equation isfound to be
Δ (119904 120591) = (8 times 10minus51199046+ 00047119904
5+ 04416119904
4
+ 78171199043+ 1699119904
2+ 90119904)
+ (0141199042+ 366119904 + 4) 119890
minus119904120591= 0
(26)
Note that for 120591 = 0 the characteristic equation of the delay-free system has roots at 119904
12= minus19035 plusmn 11989565838 119904
34=
minus0501 plusmn 11989504095 1199045
= minus180155 1199046
= minus14121 whichindicates that the delay-free system is stable
Step 2 Construct the119882(1205962
119888)polynomial using (10) and com-
pute its real positive roots 120596119888119898 if they exist The polynomial
is computed as
119882(1205962
119888) = 64 times 10
minus912059612
119888minus 48754 times 10
minus512059610
119888+ 01189120596
8
119888
+ 5609301205966
119888+ 1369545120596
4
119888+ 687244120596
2
119888
minus 16 = 0
(27)
It is found that this polynomial has only one positive real rootThis positive real root is found to be 120596
119888= 04131 rads
Step 3 Compute the delay margin for each positive rootfound in Step 2 using (12) and select the minimum of those asthe system delaymargin for this PI controller gainsThe delaymargin is computed as 120591lowast = 28760 s
Step 4 Determine the root tendency (RT) for each positiveroot120596
119888119898using (21)TheRT for120596
119888= 04131 rads is computed
as RT = +1 This RT indicates that a pair of complex rootspasses from stable half plane to unstable half plane crossing119895120596-axis 119904 = plusmn11989504131 rads for 120591lowast = 28760 s and the systembecomes unstable
For the theoretical analysis the effect of PI controllergains on the delay margin is also investigated Table 1shows delay margins of the AVR system with a stabilizingtransformer for the range of 119870
119875= 03ndash07 and 119870
119868= 01ndash
10 sminus1 It is clear from Table 1 that the delay margin decreases
Mathematical Problems in Engineering 7
Table 1 Delay margins 120591lowast for different values of 119870119868and 119870
119875of the
AVR system with a stabilizing transformer
119870119868(sminus1) 120591
lowast (s)119870119875= 03 119870
119875= 05 119870
119875= 07
01 54172 44662 3810802 40532 39038 3651503 35181 35078 3423404 32443 32645 3240305 30813 31073 3105906 29745 29996 3007107 28997 29223 2933008 28446 28645 2876009 28026 28199 2831210 27694 27846 27952
as the integral gain increases when 119870119875is fixed In order to
find out the quantitative impact of the stabilizing transformeron the delay margin delay margins are also obtained for thecase in which a stabilizing transformer is not used in the AVRsystem [29] Table 2 shows delay margins of the AVR systemwithout a stabilizing transformer It is clear from Tables 1and 2 that compensation of the AVR system by a stabilizingtransformer significantly increases the delay margins for allvalues of PI controller gains which makes the AVR systemmore stable For example for 119870
119875= 07 and 119870
119868= 08 sminus1 the
delay margin when a stabilizing transformer is not includedis found to be 120591
lowast= 01554 s while it is 120591
lowast= 28760 s
when a stabilizing transformer is included This is obviouslya significant improvement in the stability performance of theAVR system This observation is valid for all values of PIcontroller gains as indicated in Tables 1 and 2
42 Verification of Theoretical Delay Margin Results Mat-labSimulink is used to verify the theoretical results on thedelaymargin and to illustrate how the stabilizing transformerdamps the oscillations in the presence of time delays For theillustrative purpose PI controller gains are chosen as 119870
119875=
07 and 119870119868= 08 sminus1 From Table 1 for these gains the delay
margin is found to be 120591lowast
= 28760 s when the stabilizingtransformer is included Simulation result for this delay valueis shown in Figure 4(a) It is clear that sustained oscillationsare observed indicating a marginally stable operation Whenthe time delay is less than the delay margin it is expected thatthe exciter systemwill be stable Figure 4(a) also shows such asimulation result for 120591 = 274 s Similarly when the time delayis larger than the delay margin the system will have growingoscillations indicating an unstable operation as illustratedin Figure 4(a) for 120591 = 30 s These simulation results showthat the theoretical method correctly estimates the delaymargin of the AVR system compensated by a stabilizingtransformer Moreover the voltage response of the AVRsystem not including a stabilizing transformer is presentedin Figure 4(b) indicating the same type of dynamic behavior
Table 2 Delay margins 120591lowast for different values of 119870119868and 119870
119875of the
AVR system without a stabilizing transformer
119870119868(sminus1) 120591
lowast (s)119870119875= 03 119870
119875= 05 119870
119875= 07
01 14164 06275 0365202 09700 05471 0334903 06781 04665 0303704 04831 03912 0272205 03459 03235 0241106 02447 02639 0211107 01674 02118 0182508 01066 01664 0155409 00576 01267 0130010 00174 00920 01063
as the AVR system including a stabilizing transformer with asmaller delay margin (120591lowast = 01554 s)
The damping effect of the stabilizing transformer couldbe easily illustrated by time-domain simulations Figure 5(a)compares the voltage response of the AVR system with andwithout a stabilizing transformer for 120591lowast = 01554 s It is clearthat theAVR systemnot including the stabilizing transformeris marginally stable or on the stability boundary havingsustained oscillations while the AVR system compensated bya stabilizing transformer has a response with quickly dampedoscillations Similarly Figure 5(b) shows the voltage responseof the AVR system with and without the stabilizing trans-former for 120591 = 017 s When the stabilizing transformer isnot considered the system is unstable since 120591 = 017 s gt 120591
lowast=
01554 s and growing oscillations are observed However theaddition of the stabilizing transformer damps the oscillationsand makes the excitation control system stable
5 Conclusions
This paper has proposed an exact method to compute thedelay margin for stability of the AVR system including astabilizing transformer The method first eliminates the tran-scendental term in the characteristic equation without usingany approximation The resulting augmented equation hasbecome a regular polynomial whose real roots coincide withthe imaginary roots of the characteristic equation exactlyAn expression in terms of system parameters and imaginaryroots of the characteristic equation has been derived forcomputing the delay margin Moreover using the augmentedequation a simple root sensitivity test has been developed todetermine the direction of the root transition
The effect of PI controller gains on the delay marginhas been investigated The theoretical results indicate thatthe delay margin decreases as the integral gain increasesfor a given proportional gain Such a decrease in delaymargin implies a less stable AVR system Moreover it hasbeen observed that the compensation of the AVR systemwith a stabilizing transformer remarkably increases the delay
8 Mathematical Problems in Engineering
0 20 40 60 80 100
0
05
1
15
2
25
3
Time (s)
minus1
minus05
120591 = 274
120591 = 3
120591 = 2876
Gen
erat
or te
rmin
al v
olta
geVt
(pu)
(a)
0 2 4 6 8 10 12 14 16 18 20
0
05
1
15
2
25
3
Time (s)
minus1
minus05
120591 = 01554
120591 = 0 14
120591 = 017
Gen
erat
or te
rmin
al v
olta
geVt
(pu)
(b)
Figure 4 Voltage response of the AVR system for 119870119875= 07 and 119870
119868= 08 sminus1 (a) with a stabilizing transformer and 120591 = 274 2876 and 30 s
and (b) without a stabilizing transformer and 120591 = 014 01554 and 017 s
0 2 4 6 8 10 12 14 16 18 20
0
05
1
15
2
25
Time (s)
Without a stabilizing transformerWith a stabilizing transformer
minus05
Gen
erat
or te
rmin
al v
olta
geVt
(pu)
(a)
0 2 4 6 8 10 12 14 16 18 20
0
05
1
15
2
25
3
Time (s)
minus1
minus05Gen
erat
or te
rmin
al v
olta
geVt
(pu)
Without a stabilizing transformerWith a stabilizing transformer
(b)
Figure 5 Voltage response of the AVR system with and without a stabilizing transformer for 119870119875= 07 and 119870
119868= 08 sminus1 (a) 120591 = 01554 s (b)
120591 = 017 s
margin of the system which indicates a more stable AVRsystem
Theoretical delay margin results have been verified bycarrying out simulation studies It has been observed thatthe proposed method correctly estimates the delay margin ofthe AVR system Additionally with the help of simulations ithas been shown that the stabilizing transformer significantlyimproves the system dynamic performance by damping theoscillations
With the help of the results presented controller gainscould be properly selected such that the excitation controlsystem will be stable and will have a desired dampingperformance even if certain amount of time delays exists inthe system
The following studies have been put in perspective asfuture work (i) the extension of the proposed methodinto multimachine power systems with commensurate timedelays (ii) the influence of power system stabilizer (PSS)
Mathematical Problems in Engineering 9
on the delay margin and (iii) the probabilistic evaluation ofdelay margin as to take into account random nature of timedelays
Appendix
The coefficients of polynomials 119875(119904) and 119876(119904) given in (5) interms of gains and time constants of the AVR system
1199016= 119879119860119879119864119879119865119879119866119879119877
1199015= 119879119860119879119864119879119865119879119866
+ 119879119877(119879119860119879119864119879119865+ 119879119860119879119864119879119866+ 119879119860119879119865119879119866+ 119879119864119879119865119879119866)
1199014= 119879119860119879119864119879119865+ 119879119860119879119864119879119866+ 119879119860119879119865119879119866+ 119879119864119879119865119879119866
+ 119879119877(119879119860119879119864+ 119879119860119879119865+ 119879119864119879119865+ 119879119860119879119866+ 119879119864119879119866
+119879119865119879119866+ 119870119860119870119864119870119875119870119865119879119866)
1199013= 119879119860119879119864+ 119879119860119879119865+ 119879119864119879119865+ 119879119860119879119866+ 119879119864119879119866
+ 119879119865119879119866+ 119870119860119870119864119870119875119870119865119879119866
+ 119879119877(119879119860+ 119879119864+ 119879119865+ 119870119860119870119864119870119875119870119865
+119870119860119870119864119870119868119870119865119879119866+ 119879119866)
1199012= 119879119860+ 119879119864+ 119879119865+ 119870119860119870119864119870119875119870119865+ 119870119860119870119864119870119868119870119865119879119866+ 119879119866
+ 119879119877(119870119860119870119864119870119868119870119865+ 1)
1199011= 1 + 119870
119860119870119864119870119868119870119865
1199022= 119870119860119870119864119870119875119870119866119870119877119879119865
1199021= 119870119860119870119864119870119866119870119877(119870119875+ 119870119868119879119865)
1199020= 119870119860119870119864119870119868119870119866119870119877
(A1)
The coefficients of the polynomial119882(1205962
119888) given in (10)
11990512
= 1199012
6 119905
10= 1199012
5minus 211990141199016
1199058= 1199012
4minus 211990131199015+ 211990121199016
1199056= 1199012
3minus 211990121199014+ 211990111199015
1199054= 1199012
2minus 211990111199013minus 1199022
2
1199052= 1199012
1minus 1199022
1+ 211990201199022 119905
0= minus1199022
0
(A2)
The coefficients of the analytical formula given in (12)
1198868= minus11990161199022 119886
7= 11990161199021minus 11990151199022
1198866= 11990141199022+ 11990161199020minus 11990151199021
1198865= minus11990141199021+ 11990131199022+ 11990151199020
1198864= minus11990121199022minus 11990141199020+ 11990131199021
1198863= 11990121199021minus 11990111199022minus 11990131199020
1198862= 11990121199020minus 11990111199021
1198861= 11990111199020 119886
0= 0
(A3)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] P Kundur Power System Stability and Control McGraw-HillNew York NY USA 1994
[2] IEEE Standard 4215 IEEE Recommended Practice for ExcitationSystem Models for Power System Stability Studies IEEE PowerEngineering Society 2005
[3] A G Phadke ldquoSynchronized phasor measurements in powersystemsrdquo IEEE Computer Applications in Power vol 6 no 2 pp10ndash15 1993
[4] B Naduvathuparambil M C Venti and A Feliachi ldquoCom-munication delays in wide area measurement systemsrdquo inProceedings of the 34th Southeastern Symposium on SystemTheory vol 1 pp 118ndash122 University of Alabama March 2002
[5] S Bhowmik K Tomsovic and A Bose ldquoCommunicationmod-els for third party load frequency controlrdquo IEEE Transactions onPower Systems vol 19 no 1 pp 543ndash548 2004
[6] M Liu L Yang D Gan D Wang F Gao and Y Chen ldquoThestability of AGC systems with commensurate delaysrdquo EuropeanTransactions on Electrical Power vol 17 no 6 pp 615ndash627 2007
[7] H Wu K S Tsakalis and G T Heydt ldquoEvaluation of timedelay effects to wide area power system stabilizer designrdquo IEEETransactions on Power Systems vol 19 no 4 pp 1935ndash19412004
[8] X Yu and K Tomsovic ldquoApplication of linear matrix inequal-ities for load frequency control with communication delaysrdquoIEEETransactions on Power Systems vol 19 no 3 pp 1508ndash15152004
[9] L Jiang W Yao Q H Wu J Y Wen and S J Cheng ldquoDelay-dependent stability for load frequency control with constantand time-varying delaysrdquo IEEE Transactions on Power Systemsvol 27 no 2 pp 932ndash941 2012
[10] J Quanyuan Z Zhenyu and C Yijia ldquoWide-area TCSCcontroller design in consideration of feedback signalsrsquo timedelaysrdquo in Proceedings of the IEEE Power Engineering SocietyGeneralMeeting pp 1676ndash1680 San Francisco Calif USA June2005
[11] J Luque J I Escudero and F Perez ldquoAnalytic model of themeasurement errors caused by communications delayrdquo IEEETransactions on Power Delivery vol 17 no 2 pp 334ndash337 2002
[12] S P Carullo and C O Nwankpa ldquoExperimental validation ofa model for an information-embedded power systemrdquo IEEETransactions on Power Delivery vol 20 no 3 pp 1853ndash18632005
10 Mathematical Problems in Engineering
[13] C-W Park and W-H Kwon ldquoTime-delay compensation forinduction motor vector control systemrdquo Electric Power SystemsResearch vol 68 no 3 pp 238ndash247 2004
[14] H Okuno and T Fujii ldquoDelayed feedback controlled powersystemrdquo in Proceedings of the SICE Annual Conference pp2659ndash2663 August 2005
[15] H-K Chen T-N Lin and J-H Chen ldquoDynamic analysiscontrolling chaos and chaotification of a SMIB power systemrdquoChaos Solitons and Fractals vol 24 no 5 pp 1307ndash1315 2005
[16] H Jia X Yu Y Yu and C Wang ldquoPower system smallsignal stability region with time delayrdquo International Journal ofElectrical Power and Energy Systems vol 30 no 1 pp 16ndash222008
[17] S Ayasun ldquoComputation of time delay margin for power sys-tem small-signal stabilityrdquo European Transactions on ElectricalPower vol 19 no 7 pp 949ndash968 2009
[18] J Chen G Gu and C N Nett ldquoA new method for computingdelay margins for stability of linear delay systemsrdquo Systems andControl Letters vol 26 no 2 pp 107ndash117 1995
[19] K Gu V L Kharitonov and J Chen Stability of Time DelaySystems Birkhaauser Boston Mass USA 2003
[20] P Fu S-I Niculescu and J Chen ldquoStability of linear neutraltime-delay systems exact conditions via matrix pencil solu-tionsrdquo IEEE Transactions on Automatic Control vol 51 no 6pp 1063ndash1069 2006
[21] K Walton and J E Marshall ldquoDirect method for TDS stabilityanalysisrdquo IEE Proceedings D Control Theory and Applicationsvol 134 no 2 pp 101ndash107 1987
[22] J-H Su ldquoAsymptotic stability of linear autonomous systemswith commensurate time delaysrdquo IEEE Transactions on Auto-matic Control vol 40 no 6 pp 1114ndash1117 1995
[23] J Louisell ldquoAmatrixmethod for determining the imaginary axiseigenvalues of a delay systemrdquo IEEE Transactions on AutomaticControl vol 46 no 12 pp 2008ndash2012 2001
[24] Z V Rekasius ldquoA stability test for systems with delaysrdquo inProceedings of Joint Automatic Control Conference paper noTP9-A 1980
[25] N Olgac and R Sipahi ldquoAn exact method for the stabilityanalysis of time-delayed linear time-invariant (LTI) systemsrdquoIEEE Transactions on Automatic Control vol 47 no 5 pp 793ndash797 2002
[26] H Fazelinia R Sipahi and N Olgac ldquoStability robustness anal-ysis of multiple time-delayed systems using ldquobuilding blockrdquoconceptrdquo IEEE Transactions on Automatic Control vol 52 no5 pp 799ndash810 2007
[27] R Sipahi and N Olgac ldquoA comparative survey in determiningthe imaginary characteristic roots of LTI time delayed systemsrdquoin Proceedings of the 16th IFAC World Congress vol 16 p 635Prague Czech Republic July 2005
[28] MATLAB High-Performance Numeric Computation and Visu-alization Software The Mathworks Natick Mass USA 2001
[29] S Ayasun and A Gelen ldquoStability analysis of a generator exci-tation control system with time delaysrdquo Electrical Engineeringvol 91 no 6 pp 347ndash355 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
Amplifier Exciter Generator
Sensor and rectifier
PI controller
Measurement and communication
signal delay
+
Stabilizingtransformer
Vref(s)
minus
VE(s)GC(s) = KP +
KI
sGA(s) =
KA
1 + TAs
VR(s)
GF(s) =KFs
1 + TFs
eminuss120591
GE(s) =KE
1 + TEs
VF(s)GG(s) =
KG
1 + TGs
VT(s)
VS(s)GR(s) =
KR
1 + TRs
Figure 2 Block diagram of the excitation control system with a stabilizing transformer and time delay
Then an easy-to-use formula is derived to determine thedelay margin in terms of system parameters and imaginaryroots of the characteristic equation which is the maincontribution of the paper
In this work delay margins are first theoretically deter-mined for a wide range of PI controller gains Then theoret-ical delay margin results are verified by using time-domainsimulation capabilities of MatlabSimulink [28] Moreoverdelay margin results of the excitation control system with astabilizing transformer are compared with those of the exci-tation control system not including a stabilizing transformerIt is observed that the compensation of the excitation systemwith a stabilizing transformer increases the delay margin ofthe system (thus the stability margin) and provides signifi-cant amount of damping to system oscillations enhancing theclosed-loop stability of the time-delayed excitation controlsystem
2 AVR System Model with Time Delayand Stability
21 AVR System Model with Time Delay For load frequencycontrol and excitation control systems linear or linearizedmodels are commonly used to analyze the system dynamicsand to design a controller Figure 2 shows the block diagramof a generator excitation control system including a timedelay Note that each component of the system namelyamplifier exciter generator sensor and rectifier is modeledby a first-order transfer function [1 2] The transfer functionof each component is given below
119866119860 (119904) =
119870119860
1 + 119879119860119904 119866
119864 (119904) =119870119864
1 + 119879119864119904
119866119866 (119904) =
119870119866
1 + 119879119866119904 119866
119877 (119904) =119870119877
1 + 119879119877119904
(1)
where 119870119860 119870119864 119870119866 and 119870
119877are the gains of amplifier exciter
generator and sensor respectively and119879119860119879119864119879119866 and119879
119877are
the corresponding time constants
Note that as illustrated in Figure 2 using an exponentialterm the total of measurement and communication delays(120591) is placed in the feedback part of the excitation controlsystem Moreover a stabilizing transformer is introduced inthe system by adding a derivative feedback to the control sys-tem to improve the dynamic performance [2]The stabilizingtransformer will add a zero to the AVR open-loop transferfunction and thus will increase the relative stability of theclosed-loop system The transfer function of the stabilizingtransformer is given as follows
119866119865 (119904) =
119870119865119904
1 + 119904119879119865
(2)
where119870119865and 119879
119865are the gain and time constant respectively
The transfer function of the PI controller is described as
119866119888 (119904) = 119870
119875+
119870119868
119904 (3)
where 119870119875and 119870
119868are the proportional and integral gains
respectively The proportional term affects the rate of voltagerise after a step changeThe integral term affects the generatorvoltage settling time after initial voltage overshoot The inte-gral controller adds a pole at origin and increases the systemtype by one and reduces the steady-state errorThe combinedeffect of the PI controller will shape the response of thegenerator excitation system to reach the desired performance
22 Stability The characteristic equation of the excitationcontrol system can be easily obtained as
Δ (119904 120591) = 119875 (119904) + 119876 (119904) 119890minus119904120591
= 0 (4)
where119875(119904) and119876(119904) are polynomials in 119904with real coefficientsgiven below
119875 (119904) = 11990161199046+ 11990151199045+ 11990141199044+ 11990131199043+ 11990121199042+ 1199011119904
119876 (119904) = 11990221199042+ 1199021119904 + 1199020
(5)
The coefficients of these polynomials in terms of gains andtime constants are given in the Appendix
4 Mathematical Problems in Engineering
Stable region Unstable regionj120596
120591 = 0
120591 = 0
1205911 120591lowast 1205912
1205911 = 120591lowast minus Δ1205911205912 = 120591lowast + Δ120591
minusj120596c
j120596c
120590
1205911 lt 120591lowast lt 1205912
Figure 3 Illustration of the movement of the characteristic roots with respect to time delay
The main goal of the stability studies of time-delayedsystems is to determine conditions on the delay for any givenset of system parameters that will guarantee the stability ofthe system As with the delay-free system (ie 120591 = 0) thestability of the AVR system depends on the locations of theroots of systemrsquos characteristic equation defined by (4) It isobvious that the roots of (4) are a function of the time delay120591 As 120591 changes location of some of the roots may changeFor the system to be asymptotically stable all the roots of thecharacteristic equation of (4) must lie in the left half of thecomplex plane That is
Δ (119904 120591) = 0 forall119904 isin 119862+ (6)
where119862+ represents the right half plane of the complex planeDepending on system parameters there are two differentpossible types of asymptotic stability situations due to thetime delay 120591 [19 21]
(i) Delay-independent stability the characteristic equa-tion of (4) is said to be delay-independent stable ifthe stability condition of (6) holds for all positive andfinite values of the delay 120591 isin [0infin)
(ii) Delay-dependent stability the characteristic equationof (4) is said to be delay-dependent stable if thecondition of (6) holds for some values of delaysbelonging in the delay interval 120591 isin [0 120591
lowast) and is
violated for other values of delay 120591 ge 120591lowast
In the delay-dependent case the roots of the characteris-tic equations move as the time delay 120591 increases starting from120591 = 0 Figure 3 illustrates the movement of the roots Notethat the delay-free system (120591 = 0) is assumed to be stableThis is a realistic assumption since for the practical valuesof system parameters the excitation control system is stablewhen the total delay is neglected Observe that as the timedelay 120591 is increased a pair of complex eigenvalues moves inthe left half of the complex plane For a finite value of 120591 gt 0they cross the imaginary axis and pass to the right half planeThe time delay value 120591
lowast at which the characteristic equationhas purely imaginary eigenvalues is the upper bound on the
delay size or the delay margin for which the system willbe stable for any given delay less or equal to this bound120591 le 120591
lowast In order to characterize the stability property of (4)completely we first need to determine whether the system forany given set of parameters is delay-independent stable or notand if not to determine the delay margin 120591
lowast for a wide rangeof system parameters In the following section we present apractical approach that gives a criterion for evaluating thedelay dependency of stability and an analytical formula tocompute the delay margin for the delay-dependent case
3 Delay Margin Computation
A necessary and sufficient condition for the system to beasymptotically stable is that all the roots of the characteristicequation of (4) lie in the left half of the complex plane Inthe single delay case the problem is to find values of 120591lowast forwhich the characteristic equation of (4) has roots (if any) onthe imaginary axis of the s-plane Clearly Δ(s 120591) = 0 is animplicit function of 119904 and 120591 which may or may not cross theimaginary axis Assume for simplicity that Δ(119904 0) = 0 has allits roots in the left half plane That is the delay-free system isstable If for some 120591 Δ(119904 120591) = 0 has a root on the imaginaryaxis at 119904 = 119895120596
119888 so does Δ(minus119904 120591) = 0 for the same value
of 120591 and 120596119888because of the complex conjugate symmetry of
complex roots Therefore looking for roots on the imaginaryaxis reduces to finding values of 120591 for which Δ(119904 120591) = 0 andΔ(minus119904 120591) = 0 have a common root [21] That is
119875 (119904) + 119876 (119904) 119890minus119904120591
= 0
119875 (minus119904) + 119876 (minus119904) 119890119904120591
= 0
(7)
By eliminating exponential terms in (7) we get the followingpolynomial
119875 (119904) 119875 (minus119904) minus 119876 (119904) 119876 (minus119904) = 0 (8)
If we replace 119904 by 119895120596119888in (8) we have the polynomial in 120596
2
119888
given below
119882(1205962
119888) = 119875 (119895120596
119888) 119875 (minus119895120596
119888) minus 119876 (119895120596
119888) 119876 (minus119895120596
119888) = 0 (9)
Mathematical Problems in Engineering 5
Substituting 119875(119904) and 119876(119904) polynomials given in (5) into(9) we could obtain the following 12th order augmentedcharacteristic equation or polynomial
119882(1205962
119888) = 1199051212059612
119888+ 1199051012059610
119888+ 11990581205968
119888+ 11990561205966
119888
+ 11990541205964
119888+ 11990521205962
119888+ 1199050= 0
(10)
where the coefficients 1199050 1199052 1199054 1199056 1199058 11990510 11990512
are real-valuedand given in the Appendix
Please note that transcendental characteristic equationwith single delay given in (4) is now converted into apolynomial without the transcendentality given by (10) andits positive real roots coincide with the imaginary roots of(4) exactly The roots of this polynomial might easily bedetermined by standard methods Depending on the roots of(10) the following situation may occur
(i) The polynomial of (10) may not have any positive realroots which implies that the characteristic equationof (4) does not have any roots on the 119895120596-axis In thatcase the system is stable for all 120591 ge 0 indicating thatthe system is delay-independent stable
(ii) The polynomial of (10) may have at least one positivereal root which implies that the characteristic equa-tion of (4) has at least a pair of complex eigenvalues onthe 119895120596-axis In that case the system is delay-dependentstable
For a positive real root (120596119888) of (10) the corresponding value
of delay margin 120591lowast can be easily obtained using (7) as [21]
120591lowast=
1
120596119888
Tanminus1 (Im 119875 (119895120596
119888) 119876 (119895120596
119888)
Re minus119875 (119895120596119888) 119876 (119895120596
119888)
) +2119903120587
120596119888
119903 = 0 1 2 infin
(11)
By substituting the polynomial of 119875(119904) and 119876(119904) given in (5)the analytical formula for computing the delaymargin ofAVRsystem is determined as
120591lowast=
1
120596119888
Tanminus1 (11988671205967
119888+ 11988651205965
119888+ 11988631205963
119888+ 1198861120596119888
11988681205968119888+ 11988661205966119888+ 11988641205964119888+ 11988621205962119888+ 1198860
)
+2119903120587
120596119888
119903 = 0 1 2 infin
(12)
where the coefficients 119886119894 119894 = 0 1 8 are real-valued and
given in the AppendixFor the positive roots of (10) we also need to check if
at 119904 = 119895120596119888 the root of (4) crosses the imaginary axis with
increasing 120591This can be determined by the sign of Re[119889119904119889120591]The necessary condition for the existence of roots crossingthe imaginary axis is that the critical characteristic rootscross the imaginary axis with nonzero velocity (transversalitycondition) that is
Re [ 119889119904
119889120591]
119904=119895120596119888
= 0 (13)
where Re(sdot) denotes the real part of a complex variable Thesign of root sensitivity is defined as root tendency (RT)
RT|119904=119895120596119888
= sgnRe [ 119889119904
119889120591]
119904=119895120596119888
(14)
By taking the derivative of (4) with respect to 120591 and noticingthat 119904 is an explicit function of 120591 we obtain
119889119904
119889120591=
119876 (119904) 119904119890minus119904120591
1198751015840 (119904) + 1198761015840 (119904) 119890minus119904120591 minus 119876 (119904) 120591119890minus119904120591 (15)
where 1198751015840(119904) and 119876
1015840(119904) denote the first-order derivatives of
119875(119904) and119876(119904)with respect to 119904 respectively Using (4) we canrewrite this expression as
119889119904
119889120591= minus119904[
1198751015840(119904)
119875 (119904)minus
1198761015840(119904)
119876 (119904)+ 120591]
minus1
(16)
We can get the corresponding root tendency by evaluating(16) at 119904 = 119895120596
119888
RT|119904=119895120596119888
= minus sgn[Re(119895120596119888(1198751015840(119895120596119888)
119875(119895120596119888)minus
1198761015840(119895120596119888)
119876(119895120596119888)+ 120591)
minus1
)]
= minus sgn[Re( 1
119895120596119888
(1198751015840(119895120596119888)
119875 (119895120596119888)
minus1198761015840(119895120596119888)
119876 (119895120596119888)
+ 120591))]
= sgn[Im(1
120596119888
(1198761015840(119895120596119888)
119876 (119895120596119888)
minus1198751015840(119895120596119888)
119875 (119895120596119888)))]
(17)
Itmust be noted that the root tendency is independent of timedelay 120591 This implies that even though there are an infinitenumber of values of 120591 associated with each value of 120596
119888that
makes Δ(119895120596119888 120591) = 0 the behavior of the roots at these points
will always be the same It can be easily shown by furthersimplifications of (17) that RT information can be deducedtrivially from the polynomial 119882(120596
2
119888) in (10) Recalling that
119904 = 119895120596119888 we have 119882(120596
2
119888) = 0 Then from (9) we have
119876(119895120596119888) = 119875(119895120596
119888)119875(minus119895120596
119888)119876(minus119895120596
119888) Thus
RT|119904=119895120596119888
= sgn[Im(1
120596119888
(1198761015840(119895120596119888) 119876 (minus119895120596
119888)
119875 (119895120596119888) 119875 (minus119895120596
119888)
minus1198751015840(119895120596119888)
119875 (119895120596119888)))]
= sgn[Im(1
120596119888
(1198761015840(119895120596119888) 119876 (minus119895120596
119888)minus1198751015840(119895120596119888) 119875 (minus119895120596
119888)
119875 (119895120596119888) 119875 (minus119895120596
119888)
))]
= sgn [Im(1
120596119888
(1198761015840(119895120596119888) 119876 (minus119895120596
119888) minus 1198751015840(119895120596119888) 119875 (minus119895120596
119888)))]
(18)
6 Mathematical Problems in Engineering
since 119875(119895120596119888)119875(minus119895120596
119888) = |119875(119895120596
119888)|2
gt 0 Finally using theproperty Im(119911) = (119911 minus 119911)2119895 for any complex number 119911 wehave
RT|119904=119895120596119888
= sgn 1
2119895120596119888
times [(1198761015840(119895120596119888) 119876 (minus119895120596
119888) minus 119876 (119895120596
119888) 1198761015840(minus119895120596119888)
minus1198751015840(119895120596119888) 119875 (minus119895120596
119888) + 119875 (119895120596
119888) 1198751015840(minus119895120596119888))]
(19)
which finally leads us to
RT|119904=119895120596119888
= sgn [1198821015840(1205962
119888)] (20)
where the prime represents differentiation with respect to1205962
119888
The evaluation of the root sensitivities with respect to thetime delay is unique feature of the proposed method Thisexpression gives a simple criterion to determine the directionof transition of the roots at 119904 = 119895120596
119888as 120591 increases from
1205911
= 120591lowastminus Δ120591 to 120591
2= 120591lowast+ Δ120591 0 lt Δ120591 ≪ 1 as shown in
Figure 3The root 119904 = 119895120596119888crosses the imaginary axis either to
unstable right half plane when RT = +1 or to stable left halfplane when RT = minus1
For the excitation control system the root tendency foreach crossing frequency could be easily determined by thefollowing expression obtained by taking the derivative of thepolynomial given in (10) with respect to 120596
2
119888
RT|119904=119895120596119888
= 61199051212059610
119888+ 5119905101205968
119888+ 411990581205966
119888
+ 311990561205964
119888+ 211990541205962
119888+ 1199052
(21)
Itmust be noted here that the polynomial of (10)mayhavemultiple but finite number of positive real roots for all 120591 isin
R+ Let us call this set
120596119888 = 120596
1198881 1205961198882 120596
119888q (22)
This finite number 119902 is influenced not only by the systemorder but also by the coefficients of polynomials 119875(119904) and119876(119904) Furthermore for each 120596
119888119898 119898 = 1 2 119902 we can get
infinitely many periodically spaced 120591lowast
119898values by using (12)
Let us call this set
120591lowast
119898 = 120591
lowast
1198981 120591lowast
1198982 120591
lowast
119898infin 119898 = 1 2 119902 (23)
where 120591119898119903+1
minus 120591119898119903
= 2120587120596119888is the apparent period of
repetition According to the definition of delay margin theminimum of 120591
lowast
119898 119898 = 1 2 119902 will be the system delay
margin
120591lowast= min (120591
lowast
119898) (24)
4 Results and Discussion
41 Theoretical Results In this section the delay margin 120591lowast
for stability for awide range of PI controller gains is computedusing the expression given in (12) Theoretical delay margin
results are verified by using MatlabSimulink The gains andtime constants of the exciter control system used in theanalysis are as follows
119879119860= 01 s 119879
119864= 04 s 119879
119866= 10 s
119879119877= 005 s 119879
119865= 004 s
119870119860= 5 119870
119864= 119870119866= 119870119877= 10 119870
119865= 20
(25)
First we choose typical PI controller gains119870119875= 07 119870
119868=
08 sminus1 to demonstrate the delay margin computation Theprocess of the delay margin computation consists of thefollowing four steps
Step 1 Determine the characteristic equation of time-delayedexcitation control system using (4) and (5) This equation isfound to be
Δ (119904 120591) = (8 times 10minus51199046+ 00047119904
5+ 04416119904
4
+ 78171199043+ 1699119904
2+ 90119904)
+ (0141199042+ 366119904 + 4) 119890
minus119904120591= 0
(26)
Note that for 120591 = 0 the characteristic equation of the delay-free system has roots at 119904
12= minus19035 plusmn 11989565838 119904
34=
minus0501 plusmn 11989504095 1199045
= minus180155 1199046
= minus14121 whichindicates that the delay-free system is stable
Step 2 Construct the119882(1205962
119888)polynomial using (10) and com-
pute its real positive roots 120596119888119898 if they exist The polynomial
is computed as
119882(1205962
119888) = 64 times 10
minus912059612
119888minus 48754 times 10
minus512059610
119888+ 01189120596
8
119888
+ 5609301205966
119888+ 1369545120596
4
119888+ 687244120596
2
119888
minus 16 = 0
(27)
It is found that this polynomial has only one positive real rootThis positive real root is found to be 120596
119888= 04131 rads
Step 3 Compute the delay margin for each positive rootfound in Step 2 using (12) and select the minimum of those asthe system delaymargin for this PI controller gainsThe delaymargin is computed as 120591lowast = 28760 s
Step 4 Determine the root tendency (RT) for each positiveroot120596
119888119898using (21)TheRT for120596
119888= 04131 rads is computed
as RT = +1 This RT indicates that a pair of complex rootspasses from stable half plane to unstable half plane crossing119895120596-axis 119904 = plusmn11989504131 rads for 120591lowast = 28760 s and the systembecomes unstable
For the theoretical analysis the effect of PI controllergains on the delay margin is also investigated Table 1shows delay margins of the AVR system with a stabilizingtransformer for the range of 119870
119875= 03ndash07 and 119870
119868= 01ndash
10 sminus1 It is clear from Table 1 that the delay margin decreases
Mathematical Problems in Engineering 7
Table 1 Delay margins 120591lowast for different values of 119870119868and 119870
119875of the
AVR system with a stabilizing transformer
119870119868(sminus1) 120591
lowast (s)119870119875= 03 119870
119875= 05 119870
119875= 07
01 54172 44662 3810802 40532 39038 3651503 35181 35078 3423404 32443 32645 3240305 30813 31073 3105906 29745 29996 3007107 28997 29223 2933008 28446 28645 2876009 28026 28199 2831210 27694 27846 27952
as the integral gain increases when 119870119875is fixed In order to
find out the quantitative impact of the stabilizing transformeron the delay margin delay margins are also obtained for thecase in which a stabilizing transformer is not used in the AVRsystem [29] Table 2 shows delay margins of the AVR systemwithout a stabilizing transformer It is clear from Tables 1and 2 that compensation of the AVR system by a stabilizingtransformer significantly increases the delay margins for allvalues of PI controller gains which makes the AVR systemmore stable For example for 119870
119875= 07 and 119870
119868= 08 sminus1 the
delay margin when a stabilizing transformer is not includedis found to be 120591
lowast= 01554 s while it is 120591
lowast= 28760 s
when a stabilizing transformer is included This is obviouslya significant improvement in the stability performance of theAVR system This observation is valid for all values of PIcontroller gains as indicated in Tables 1 and 2
42 Verification of Theoretical Delay Margin Results Mat-labSimulink is used to verify the theoretical results on thedelaymargin and to illustrate how the stabilizing transformerdamps the oscillations in the presence of time delays For theillustrative purpose PI controller gains are chosen as 119870
119875=
07 and 119870119868= 08 sminus1 From Table 1 for these gains the delay
margin is found to be 120591lowast
= 28760 s when the stabilizingtransformer is included Simulation result for this delay valueis shown in Figure 4(a) It is clear that sustained oscillationsare observed indicating a marginally stable operation Whenthe time delay is less than the delay margin it is expected thatthe exciter systemwill be stable Figure 4(a) also shows such asimulation result for 120591 = 274 s Similarly when the time delayis larger than the delay margin the system will have growingoscillations indicating an unstable operation as illustratedin Figure 4(a) for 120591 = 30 s These simulation results showthat the theoretical method correctly estimates the delaymargin of the AVR system compensated by a stabilizingtransformer Moreover the voltage response of the AVRsystem not including a stabilizing transformer is presentedin Figure 4(b) indicating the same type of dynamic behavior
Table 2 Delay margins 120591lowast for different values of 119870119868and 119870
119875of the
AVR system without a stabilizing transformer
119870119868(sminus1) 120591
lowast (s)119870119875= 03 119870
119875= 05 119870
119875= 07
01 14164 06275 0365202 09700 05471 0334903 06781 04665 0303704 04831 03912 0272205 03459 03235 0241106 02447 02639 0211107 01674 02118 0182508 01066 01664 0155409 00576 01267 0130010 00174 00920 01063
as the AVR system including a stabilizing transformer with asmaller delay margin (120591lowast = 01554 s)
The damping effect of the stabilizing transformer couldbe easily illustrated by time-domain simulations Figure 5(a)compares the voltage response of the AVR system with andwithout a stabilizing transformer for 120591lowast = 01554 s It is clearthat theAVR systemnot including the stabilizing transformeris marginally stable or on the stability boundary havingsustained oscillations while the AVR system compensated bya stabilizing transformer has a response with quickly dampedoscillations Similarly Figure 5(b) shows the voltage responseof the AVR system with and without the stabilizing trans-former for 120591 = 017 s When the stabilizing transformer isnot considered the system is unstable since 120591 = 017 s gt 120591
lowast=
01554 s and growing oscillations are observed However theaddition of the stabilizing transformer damps the oscillationsand makes the excitation control system stable
5 Conclusions
This paper has proposed an exact method to compute thedelay margin for stability of the AVR system including astabilizing transformer The method first eliminates the tran-scendental term in the characteristic equation without usingany approximation The resulting augmented equation hasbecome a regular polynomial whose real roots coincide withthe imaginary roots of the characteristic equation exactlyAn expression in terms of system parameters and imaginaryroots of the characteristic equation has been derived forcomputing the delay margin Moreover using the augmentedequation a simple root sensitivity test has been developed todetermine the direction of the root transition
The effect of PI controller gains on the delay marginhas been investigated The theoretical results indicate thatthe delay margin decreases as the integral gain increasesfor a given proportional gain Such a decrease in delaymargin implies a less stable AVR system Moreover it hasbeen observed that the compensation of the AVR systemwith a stabilizing transformer remarkably increases the delay
8 Mathematical Problems in Engineering
0 20 40 60 80 100
0
05
1
15
2
25
3
Time (s)
minus1
minus05
120591 = 274
120591 = 3
120591 = 2876
Gen
erat
or te
rmin
al v
olta
geVt
(pu)
(a)
0 2 4 6 8 10 12 14 16 18 20
0
05
1
15
2
25
3
Time (s)
minus1
minus05
120591 = 01554
120591 = 0 14
120591 = 017
Gen
erat
or te
rmin
al v
olta
geVt
(pu)
(b)
Figure 4 Voltage response of the AVR system for 119870119875= 07 and 119870
119868= 08 sminus1 (a) with a stabilizing transformer and 120591 = 274 2876 and 30 s
and (b) without a stabilizing transformer and 120591 = 014 01554 and 017 s
0 2 4 6 8 10 12 14 16 18 20
0
05
1
15
2
25
Time (s)
Without a stabilizing transformerWith a stabilizing transformer
minus05
Gen
erat
or te
rmin
al v
olta
geVt
(pu)
(a)
0 2 4 6 8 10 12 14 16 18 20
0
05
1
15
2
25
3
Time (s)
minus1
minus05Gen
erat
or te
rmin
al v
olta
geVt
(pu)
Without a stabilizing transformerWith a stabilizing transformer
(b)
Figure 5 Voltage response of the AVR system with and without a stabilizing transformer for 119870119875= 07 and 119870
119868= 08 sminus1 (a) 120591 = 01554 s (b)
120591 = 017 s
margin of the system which indicates a more stable AVRsystem
Theoretical delay margin results have been verified bycarrying out simulation studies It has been observed thatthe proposed method correctly estimates the delay margin ofthe AVR system Additionally with the help of simulations ithas been shown that the stabilizing transformer significantlyimproves the system dynamic performance by damping theoscillations
With the help of the results presented controller gainscould be properly selected such that the excitation controlsystem will be stable and will have a desired dampingperformance even if certain amount of time delays exists inthe system
The following studies have been put in perspective asfuture work (i) the extension of the proposed methodinto multimachine power systems with commensurate timedelays (ii) the influence of power system stabilizer (PSS)
Mathematical Problems in Engineering 9
on the delay margin and (iii) the probabilistic evaluation ofdelay margin as to take into account random nature of timedelays
Appendix
The coefficients of polynomials 119875(119904) and 119876(119904) given in (5) interms of gains and time constants of the AVR system
1199016= 119879119860119879119864119879119865119879119866119879119877
1199015= 119879119860119879119864119879119865119879119866
+ 119879119877(119879119860119879119864119879119865+ 119879119860119879119864119879119866+ 119879119860119879119865119879119866+ 119879119864119879119865119879119866)
1199014= 119879119860119879119864119879119865+ 119879119860119879119864119879119866+ 119879119860119879119865119879119866+ 119879119864119879119865119879119866
+ 119879119877(119879119860119879119864+ 119879119860119879119865+ 119879119864119879119865+ 119879119860119879119866+ 119879119864119879119866
+119879119865119879119866+ 119870119860119870119864119870119875119870119865119879119866)
1199013= 119879119860119879119864+ 119879119860119879119865+ 119879119864119879119865+ 119879119860119879119866+ 119879119864119879119866
+ 119879119865119879119866+ 119870119860119870119864119870119875119870119865119879119866
+ 119879119877(119879119860+ 119879119864+ 119879119865+ 119870119860119870119864119870119875119870119865
+119870119860119870119864119870119868119870119865119879119866+ 119879119866)
1199012= 119879119860+ 119879119864+ 119879119865+ 119870119860119870119864119870119875119870119865+ 119870119860119870119864119870119868119870119865119879119866+ 119879119866
+ 119879119877(119870119860119870119864119870119868119870119865+ 1)
1199011= 1 + 119870
119860119870119864119870119868119870119865
1199022= 119870119860119870119864119870119875119870119866119870119877119879119865
1199021= 119870119860119870119864119870119866119870119877(119870119875+ 119870119868119879119865)
1199020= 119870119860119870119864119870119868119870119866119870119877
(A1)
The coefficients of the polynomial119882(1205962
119888) given in (10)
11990512
= 1199012
6 119905
10= 1199012
5minus 211990141199016
1199058= 1199012
4minus 211990131199015+ 211990121199016
1199056= 1199012
3minus 211990121199014+ 211990111199015
1199054= 1199012
2minus 211990111199013minus 1199022
2
1199052= 1199012
1minus 1199022
1+ 211990201199022 119905
0= minus1199022
0
(A2)
The coefficients of the analytical formula given in (12)
1198868= minus11990161199022 119886
7= 11990161199021minus 11990151199022
1198866= 11990141199022+ 11990161199020minus 11990151199021
1198865= minus11990141199021+ 11990131199022+ 11990151199020
1198864= minus11990121199022minus 11990141199020+ 11990131199021
1198863= 11990121199021minus 11990111199022minus 11990131199020
1198862= 11990121199020minus 11990111199021
1198861= 11990111199020 119886
0= 0
(A3)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] P Kundur Power System Stability and Control McGraw-HillNew York NY USA 1994
[2] IEEE Standard 4215 IEEE Recommended Practice for ExcitationSystem Models for Power System Stability Studies IEEE PowerEngineering Society 2005
[3] A G Phadke ldquoSynchronized phasor measurements in powersystemsrdquo IEEE Computer Applications in Power vol 6 no 2 pp10ndash15 1993
[4] B Naduvathuparambil M C Venti and A Feliachi ldquoCom-munication delays in wide area measurement systemsrdquo inProceedings of the 34th Southeastern Symposium on SystemTheory vol 1 pp 118ndash122 University of Alabama March 2002
[5] S Bhowmik K Tomsovic and A Bose ldquoCommunicationmod-els for third party load frequency controlrdquo IEEE Transactions onPower Systems vol 19 no 1 pp 543ndash548 2004
[6] M Liu L Yang D Gan D Wang F Gao and Y Chen ldquoThestability of AGC systems with commensurate delaysrdquo EuropeanTransactions on Electrical Power vol 17 no 6 pp 615ndash627 2007
[7] H Wu K S Tsakalis and G T Heydt ldquoEvaluation of timedelay effects to wide area power system stabilizer designrdquo IEEETransactions on Power Systems vol 19 no 4 pp 1935ndash19412004
[8] X Yu and K Tomsovic ldquoApplication of linear matrix inequal-ities for load frequency control with communication delaysrdquoIEEETransactions on Power Systems vol 19 no 3 pp 1508ndash15152004
[9] L Jiang W Yao Q H Wu J Y Wen and S J Cheng ldquoDelay-dependent stability for load frequency control with constantand time-varying delaysrdquo IEEE Transactions on Power Systemsvol 27 no 2 pp 932ndash941 2012
[10] J Quanyuan Z Zhenyu and C Yijia ldquoWide-area TCSCcontroller design in consideration of feedback signalsrsquo timedelaysrdquo in Proceedings of the IEEE Power Engineering SocietyGeneralMeeting pp 1676ndash1680 San Francisco Calif USA June2005
[11] J Luque J I Escudero and F Perez ldquoAnalytic model of themeasurement errors caused by communications delayrdquo IEEETransactions on Power Delivery vol 17 no 2 pp 334ndash337 2002
[12] S P Carullo and C O Nwankpa ldquoExperimental validation ofa model for an information-embedded power systemrdquo IEEETransactions on Power Delivery vol 20 no 3 pp 1853ndash18632005
10 Mathematical Problems in Engineering
[13] C-W Park and W-H Kwon ldquoTime-delay compensation forinduction motor vector control systemrdquo Electric Power SystemsResearch vol 68 no 3 pp 238ndash247 2004
[14] H Okuno and T Fujii ldquoDelayed feedback controlled powersystemrdquo in Proceedings of the SICE Annual Conference pp2659ndash2663 August 2005
[15] H-K Chen T-N Lin and J-H Chen ldquoDynamic analysiscontrolling chaos and chaotification of a SMIB power systemrdquoChaos Solitons and Fractals vol 24 no 5 pp 1307ndash1315 2005
[16] H Jia X Yu Y Yu and C Wang ldquoPower system smallsignal stability region with time delayrdquo International Journal ofElectrical Power and Energy Systems vol 30 no 1 pp 16ndash222008
[17] S Ayasun ldquoComputation of time delay margin for power sys-tem small-signal stabilityrdquo European Transactions on ElectricalPower vol 19 no 7 pp 949ndash968 2009
[18] J Chen G Gu and C N Nett ldquoA new method for computingdelay margins for stability of linear delay systemsrdquo Systems andControl Letters vol 26 no 2 pp 107ndash117 1995
[19] K Gu V L Kharitonov and J Chen Stability of Time DelaySystems Birkhaauser Boston Mass USA 2003
[20] P Fu S-I Niculescu and J Chen ldquoStability of linear neutraltime-delay systems exact conditions via matrix pencil solu-tionsrdquo IEEE Transactions on Automatic Control vol 51 no 6pp 1063ndash1069 2006
[21] K Walton and J E Marshall ldquoDirect method for TDS stabilityanalysisrdquo IEE Proceedings D Control Theory and Applicationsvol 134 no 2 pp 101ndash107 1987
[22] J-H Su ldquoAsymptotic stability of linear autonomous systemswith commensurate time delaysrdquo IEEE Transactions on Auto-matic Control vol 40 no 6 pp 1114ndash1117 1995
[23] J Louisell ldquoAmatrixmethod for determining the imaginary axiseigenvalues of a delay systemrdquo IEEE Transactions on AutomaticControl vol 46 no 12 pp 2008ndash2012 2001
[24] Z V Rekasius ldquoA stability test for systems with delaysrdquo inProceedings of Joint Automatic Control Conference paper noTP9-A 1980
[25] N Olgac and R Sipahi ldquoAn exact method for the stabilityanalysis of time-delayed linear time-invariant (LTI) systemsrdquoIEEE Transactions on Automatic Control vol 47 no 5 pp 793ndash797 2002
[26] H Fazelinia R Sipahi and N Olgac ldquoStability robustness anal-ysis of multiple time-delayed systems using ldquobuilding blockrdquoconceptrdquo IEEE Transactions on Automatic Control vol 52 no5 pp 799ndash810 2007
[27] R Sipahi and N Olgac ldquoA comparative survey in determiningthe imaginary characteristic roots of LTI time delayed systemsrdquoin Proceedings of the 16th IFAC World Congress vol 16 p 635Prague Czech Republic July 2005
[28] MATLAB High-Performance Numeric Computation and Visu-alization Software The Mathworks Natick Mass USA 2001
[29] S Ayasun and A Gelen ldquoStability analysis of a generator exci-tation control system with time delaysrdquo Electrical Engineeringvol 91 no 6 pp 347ndash355 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
Stable region Unstable regionj120596
120591 = 0
120591 = 0
1205911 120591lowast 1205912
1205911 = 120591lowast minus Δ1205911205912 = 120591lowast + Δ120591
minusj120596c
j120596c
120590
1205911 lt 120591lowast lt 1205912
Figure 3 Illustration of the movement of the characteristic roots with respect to time delay
The main goal of the stability studies of time-delayedsystems is to determine conditions on the delay for any givenset of system parameters that will guarantee the stability ofthe system As with the delay-free system (ie 120591 = 0) thestability of the AVR system depends on the locations of theroots of systemrsquos characteristic equation defined by (4) It isobvious that the roots of (4) are a function of the time delay120591 As 120591 changes location of some of the roots may changeFor the system to be asymptotically stable all the roots of thecharacteristic equation of (4) must lie in the left half of thecomplex plane That is
Δ (119904 120591) = 0 forall119904 isin 119862+ (6)
where119862+ represents the right half plane of the complex planeDepending on system parameters there are two differentpossible types of asymptotic stability situations due to thetime delay 120591 [19 21]
(i) Delay-independent stability the characteristic equa-tion of (4) is said to be delay-independent stable ifthe stability condition of (6) holds for all positive andfinite values of the delay 120591 isin [0infin)
(ii) Delay-dependent stability the characteristic equationof (4) is said to be delay-dependent stable if thecondition of (6) holds for some values of delaysbelonging in the delay interval 120591 isin [0 120591
lowast) and is
violated for other values of delay 120591 ge 120591lowast
In the delay-dependent case the roots of the characteris-tic equations move as the time delay 120591 increases starting from120591 = 0 Figure 3 illustrates the movement of the roots Notethat the delay-free system (120591 = 0) is assumed to be stableThis is a realistic assumption since for the practical valuesof system parameters the excitation control system is stablewhen the total delay is neglected Observe that as the timedelay 120591 is increased a pair of complex eigenvalues moves inthe left half of the complex plane For a finite value of 120591 gt 0they cross the imaginary axis and pass to the right half planeThe time delay value 120591
lowast at which the characteristic equationhas purely imaginary eigenvalues is the upper bound on the
delay size or the delay margin for which the system willbe stable for any given delay less or equal to this bound120591 le 120591
lowast In order to characterize the stability property of (4)completely we first need to determine whether the system forany given set of parameters is delay-independent stable or notand if not to determine the delay margin 120591
lowast for a wide rangeof system parameters In the following section we present apractical approach that gives a criterion for evaluating thedelay dependency of stability and an analytical formula tocompute the delay margin for the delay-dependent case
3 Delay Margin Computation
A necessary and sufficient condition for the system to beasymptotically stable is that all the roots of the characteristicequation of (4) lie in the left half of the complex plane Inthe single delay case the problem is to find values of 120591lowast forwhich the characteristic equation of (4) has roots (if any) onthe imaginary axis of the s-plane Clearly Δ(s 120591) = 0 is animplicit function of 119904 and 120591 which may or may not cross theimaginary axis Assume for simplicity that Δ(119904 0) = 0 has allits roots in the left half plane That is the delay-free system isstable If for some 120591 Δ(119904 120591) = 0 has a root on the imaginaryaxis at 119904 = 119895120596
119888 so does Δ(minus119904 120591) = 0 for the same value
of 120591 and 120596119888because of the complex conjugate symmetry of
complex roots Therefore looking for roots on the imaginaryaxis reduces to finding values of 120591 for which Δ(119904 120591) = 0 andΔ(minus119904 120591) = 0 have a common root [21] That is
119875 (119904) + 119876 (119904) 119890minus119904120591
= 0
119875 (minus119904) + 119876 (minus119904) 119890119904120591
= 0
(7)
By eliminating exponential terms in (7) we get the followingpolynomial
119875 (119904) 119875 (minus119904) minus 119876 (119904) 119876 (minus119904) = 0 (8)
If we replace 119904 by 119895120596119888in (8) we have the polynomial in 120596
2
119888
given below
119882(1205962
119888) = 119875 (119895120596
119888) 119875 (minus119895120596
119888) minus 119876 (119895120596
119888) 119876 (minus119895120596
119888) = 0 (9)
Mathematical Problems in Engineering 5
Substituting 119875(119904) and 119876(119904) polynomials given in (5) into(9) we could obtain the following 12th order augmentedcharacteristic equation or polynomial
119882(1205962
119888) = 1199051212059612
119888+ 1199051012059610
119888+ 11990581205968
119888+ 11990561205966
119888
+ 11990541205964
119888+ 11990521205962
119888+ 1199050= 0
(10)
where the coefficients 1199050 1199052 1199054 1199056 1199058 11990510 11990512
are real-valuedand given in the Appendix
Please note that transcendental characteristic equationwith single delay given in (4) is now converted into apolynomial without the transcendentality given by (10) andits positive real roots coincide with the imaginary roots of(4) exactly The roots of this polynomial might easily bedetermined by standard methods Depending on the roots of(10) the following situation may occur
(i) The polynomial of (10) may not have any positive realroots which implies that the characteristic equationof (4) does not have any roots on the 119895120596-axis In thatcase the system is stable for all 120591 ge 0 indicating thatthe system is delay-independent stable
(ii) The polynomial of (10) may have at least one positivereal root which implies that the characteristic equa-tion of (4) has at least a pair of complex eigenvalues onthe 119895120596-axis In that case the system is delay-dependentstable
For a positive real root (120596119888) of (10) the corresponding value
of delay margin 120591lowast can be easily obtained using (7) as [21]
120591lowast=
1
120596119888
Tanminus1 (Im 119875 (119895120596
119888) 119876 (119895120596
119888)
Re minus119875 (119895120596119888) 119876 (119895120596
119888)
) +2119903120587
120596119888
119903 = 0 1 2 infin
(11)
By substituting the polynomial of 119875(119904) and 119876(119904) given in (5)the analytical formula for computing the delaymargin ofAVRsystem is determined as
120591lowast=
1
120596119888
Tanminus1 (11988671205967
119888+ 11988651205965
119888+ 11988631205963
119888+ 1198861120596119888
11988681205968119888+ 11988661205966119888+ 11988641205964119888+ 11988621205962119888+ 1198860
)
+2119903120587
120596119888
119903 = 0 1 2 infin
(12)
where the coefficients 119886119894 119894 = 0 1 8 are real-valued and
given in the AppendixFor the positive roots of (10) we also need to check if
at 119904 = 119895120596119888 the root of (4) crosses the imaginary axis with
increasing 120591This can be determined by the sign of Re[119889119904119889120591]The necessary condition for the existence of roots crossingthe imaginary axis is that the critical characteristic rootscross the imaginary axis with nonzero velocity (transversalitycondition) that is
Re [ 119889119904
119889120591]
119904=119895120596119888
= 0 (13)
where Re(sdot) denotes the real part of a complex variable Thesign of root sensitivity is defined as root tendency (RT)
RT|119904=119895120596119888
= sgnRe [ 119889119904
119889120591]
119904=119895120596119888
(14)
By taking the derivative of (4) with respect to 120591 and noticingthat 119904 is an explicit function of 120591 we obtain
119889119904
119889120591=
119876 (119904) 119904119890minus119904120591
1198751015840 (119904) + 1198761015840 (119904) 119890minus119904120591 minus 119876 (119904) 120591119890minus119904120591 (15)
where 1198751015840(119904) and 119876
1015840(119904) denote the first-order derivatives of
119875(119904) and119876(119904)with respect to 119904 respectively Using (4) we canrewrite this expression as
119889119904
119889120591= minus119904[
1198751015840(119904)
119875 (119904)minus
1198761015840(119904)
119876 (119904)+ 120591]
minus1
(16)
We can get the corresponding root tendency by evaluating(16) at 119904 = 119895120596
119888
RT|119904=119895120596119888
= minus sgn[Re(119895120596119888(1198751015840(119895120596119888)
119875(119895120596119888)minus
1198761015840(119895120596119888)
119876(119895120596119888)+ 120591)
minus1
)]
= minus sgn[Re( 1
119895120596119888
(1198751015840(119895120596119888)
119875 (119895120596119888)
minus1198761015840(119895120596119888)
119876 (119895120596119888)
+ 120591))]
= sgn[Im(1
120596119888
(1198761015840(119895120596119888)
119876 (119895120596119888)
minus1198751015840(119895120596119888)
119875 (119895120596119888)))]
(17)
Itmust be noted that the root tendency is independent of timedelay 120591 This implies that even though there are an infinitenumber of values of 120591 associated with each value of 120596
119888that
makes Δ(119895120596119888 120591) = 0 the behavior of the roots at these points
will always be the same It can be easily shown by furthersimplifications of (17) that RT information can be deducedtrivially from the polynomial 119882(120596
2
119888) in (10) Recalling that
119904 = 119895120596119888 we have 119882(120596
2
119888) = 0 Then from (9) we have
119876(119895120596119888) = 119875(119895120596
119888)119875(minus119895120596
119888)119876(minus119895120596
119888) Thus
RT|119904=119895120596119888
= sgn[Im(1
120596119888
(1198761015840(119895120596119888) 119876 (minus119895120596
119888)
119875 (119895120596119888) 119875 (minus119895120596
119888)
minus1198751015840(119895120596119888)
119875 (119895120596119888)))]
= sgn[Im(1
120596119888
(1198761015840(119895120596119888) 119876 (minus119895120596
119888)minus1198751015840(119895120596119888) 119875 (minus119895120596
119888)
119875 (119895120596119888) 119875 (minus119895120596
119888)
))]
= sgn [Im(1
120596119888
(1198761015840(119895120596119888) 119876 (minus119895120596
119888) minus 1198751015840(119895120596119888) 119875 (minus119895120596
119888)))]
(18)
6 Mathematical Problems in Engineering
since 119875(119895120596119888)119875(minus119895120596
119888) = |119875(119895120596
119888)|2
gt 0 Finally using theproperty Im(119911) = (119911 minus 119911)2119895 for any complex number 119911 wehave
RT|119904=119895120596119888
= sgn 1
2119895120596119888
times [(1198761015840(119895120596119888) 119876 (minus119895120596
119888) minus 119876 (119895120596
119888) 1198761015840(minus119895120596119888)
minus1198751015840(119895120596119888) 119875 (minus119895120596
119888) + 119875 (119895120596
119888) 1198751015840(minus119895120596119888))]
(19)
which finally leads us to
RT|119904=119895120596119888
= sgn [1198821015840(1205962
119888)] (20)
where the prime represents differentiation with respect to1205962
119888
The evaluation of the root sensitivities with respect to thetime delay is unique feature of the proposed method Thisexpression gives a simple criterion to determine the directionof transition of the roots at 119904 = 119895120596
119888as 120591 increases from
1205911
= 120591lowastminus Δ120591 to 120591
2= 120591lowast+ Δ120591 0 lt Δ120591 ≪ 1 as shown in
Figure 3The root 119904 = 119895120596119888crosses the imaginary axis either to
unstable right half plane when RT = +1 or to stable left halfplane when RT = minus1
For the excitation control system the root tendency foreach crossing frequency could be easily determined by thefollowing expression obtained by taking the derivative of thepolynomial given in (10) with respect to 120596
2
119888
RT|119904=119895120596119888
= 61199051212059610
119888+ 5119905101205968
119888+ 411990581205966
119888
+ 311990561205964
119888+ 211990541205962
119888+ 1199052
(21)
Itmust be noted here that the polynomial of (10)mayhavemultiple but finite number of positive real roots for all 120591 isin
R+ Let us call this set
120596119888 = 120596
1198881 1205961198882 120596
119888q (22)
This finite number 119902 is influenced not only by the systemorder but also by the coefficients of polynomials 119875(119904) and119876(119904) Furthermore for each 120596
119888119898 119898 = 1 2 119902 we can get
infinitely many periodically spaced 120591lowast
119898values by using (12)
Let us call this set
120591lowast
119898 = 120591
lowast
1198981 120591lowast
1198982 120591
lowast
119898infin 119898 = 1 2 119902 (23)
where 120591119898119903+1
minus 120591119898119903
= 2120587120596119888is the apparent period of
repetition According to the definition of delay margin theminimum of 120591
lowast
119898 119898 = 1 2 119902 will be the system delay
margin
120591lowast= min (120591
lowast
119898) (24)
4 Results and Discussion
41 Theoretical Results In this section the delay margin 120591lowast
for stability for awide range of PI controller gains is computedusing the expression given in (12) Theoretical delay margin
results are verified by using MatlabSimulink The gains andtime constants of the exciter control system used in theanalysis are as follows
119879119860= 01 s 119879
119864= 04 s 119879
119866= 10 s
119879119877= 005 s 119879
119865= 004 s
119870119860= 5 119870
119864= 119870119866= 119870119877= 10 119870
119865= 20
(25)
First we choose typical PI controller gains119870119875= 07 119870
119868=
08 sminus1 to demonstrate the delay margin computation Theprocess of the delay margin computation consists of thefollowing four steps
Step 1 Determine the characteristic equation of time-delayedexcitation control system using (4) and (5) This equation isfound to be
Δ (119904 120591) = (8 times 10minus51199046+ 00047119904
5+ 04416119904
4
+ 78171199043+ 1699119904
2+ 90119904)
+ (0141199042+ 366119904 + 4) 119890
minus119904120591= 0
(26)
Note that for 120591 = 0 the characteristic equation of the delay-free system has roots at 119904
12= minus19035 plusmn 11989565838 119904
34=
minus0501 plusmn 11989504095 1199045
= minus180155 1199046
= minus14121 whichindicates that the delay-free system is stable
Step 2 Construct the119882(1205962
119888)polynomial using (10) and com-
pute its real positive roots 120596119888119898 if they exist The polynomial
is computed as
119882(1205962
119888) = 64 times 10
minus912059612
119888minus 48754 times 10
minus512059610
119888+ 01189120596
8
119888
+ 5609301205966
119888+ 1369545120596
4
119888+ 687244120596
2
119888
minus 16 = 0
(27)
It is found that this polynomial has only one positive real rootThis positive real root is found to be 120596
119888= 04131 rads
Step 3 Compute the delay margin for each positive rootfound in Step 2 using (12) and select the minimum of those asthe system delaymargin for this PI controller gainsThe delaymargin is computed as 120591lowast = 28760 s
Step 4 Determine the root tendency (RT) for each positiveroot120596
119888119898using (21)TheRT for120596
119888= 04131 rads is computed
as RT = +1 This RT indicates that a pair of complex rootspasses from stable half plane to unstable half plane crossing119895120596-axis 119904 = plusmn11989504131 rads for 120591lowast = 28760 s and the systembecomes unstable
For the theoretical analysis the effect of PI controllergains on the delay margin is also investigated Table 1shows delay margins of the AVR system with a stabilizingtransformer for the range of 119870
119875= 03ndash07 and 119870
119868= 01ndash
10 sminus1 It is clear from Table 1 that the delay margin decreases
Mathematical Problems in Engineering 7
Table 1 Delay margins 120591lowast for different values of 119870119868and 119870
119875of the
AVR system with a stabilizing transformer
119870119868(sminus1) 120591
lowast (s)119870119875= 03 119870
119875= 05 119870
119875= 07
01 54172 44662 3810802 40532 39038 3651503 35181 35078 3423404 32443 32645 3240305 30813 31073 3105906 29745 29996 3007107 28997 29223 2933008 28446 28645 2876009 28026 28199 2831210 27694 27846 27952
as the integral gain increases when 119870119875is fixed In order to
find out the quantitative impact of the stabilizing transformeron the delay margin delay margins are also obtained for thecase in which a stabilizing transformer is not used in the AVRsystem [29] Table 2 shows delay margins of the AVR systemwithout a stabilizing transformer It is clear from Tables 1and 2 that compensation of the AVR system by a stabilizingtransformer significantly increases the delay margins for allvalues of PI controller gains which makes the AVR systemmore stable For example for 119870
119875= 07 and 119870
119868= 08 sminus1 the
delay margin when a stabilizing transformer is not includedis found to be 120591
lowast= 01554 s while it is 120591
lowast= 28760 s
when a stabilizing transformer is included This is obviouslya significant improvement in the stability performance of theAVR system This observation is valid for all values of PIcontroller gains as indicated in Tables 1 and 2
42 Verification of Theoretical Delay Margin Results Mat-labSimulink is used to verify the theoretical results on thedelaymargin and to illustrate how the stabilizing transformerdamps the oscillations in the presence of time delays For theillustrative purpose PI controller gains are chosen as 119870
119875=
07 and 119870119868= 08 sminus1 From Table 1 for these gains the delay
margin is found to be 120591lowast
= 28760 s when the stabilizingtransformer is included Simulation result for this delay valueis shown in Figure 4(a) It is clear that sustained oscillationsare observed indicating a marginally stable operation Whenthe time delay is less than the delay margin it is expected thatthe exciter systemwill be stable Figure 4(a) also shows such asimulation result for 120591 = 274 s Similarly when the time delayis larger than the delay margin the system will have growingoscillations indicating an unstable operation as illustratedin Figure 4(a) for 120591 = 30 s These simulation results showthat the theoretical method correctly estimates the delaymargin of the AVR system compensated by a stabilizingtransformer Moreover the voltage response of the AVRsystem not including a stabilizing transformer is presentedin Figure 4(b) indicating the same type of dynamic behavior
Table 2 Delay margins 120591lowast for different values of 119870119868and 119870
119875of the
AVR system without a stabilizing transformer
119870119868(sminus1) 120591
lowast (s)119870119875= 03 119870
119875= 05 119870
119875= 07
01 14164 06275 0365202 09700 05471 0334903 06781 04665 0303704 04831 03912 0272205 03459 03235 0241106 02447 02639 0211107 01674 02118 0182508 01066 01664 0155409 00576 01267 0130010 00174 00920 01063
as the AVR system including a stabilizing transformer with asmaller delay margin (120591lowast = 01554 s)
The damping effect of the stabilizing transformer couldbe easily illustrated by time-domain simulations Figure 5(a)compares the voltage response of the AVR system with andwithout a stabilizing transformer for 120591lowast = 01554 s It is clearthat theAVR systemnot including the stabilizing transformeris marginally stable or on the stability boundary havingsustained oscillations while the AVR system compensated bya stabilizing transformer has a response with quickly dampedoscillations Similarly Figure 5(b) shows the voltage responseof the AVR system with and without the stabilizing trans-former for 120591 = 017 s When the stabilizing transformer isnot considered the system is unstable since 120591 = 017 s gt 120591
lowast=
01554 s and growing oscillations are observed However theaddition of the stabilizing transformer damps the oscillationsand makes the excitation control system stable
5 Conclusions
This paper has proposed an exact method to compute thedelay margin for stability of the AVR system including astabilizing transformer The method first eliminates the tran-scendental term in the characteristic equation without usingany approximation The resulting augmented equation hasbecome a regular polynomial whose real roots coincide withthe imaginary roots of the characteristic equation exactlyAn expression in terms of system parameters and imaginaryroots of the characteristic equation has been derived forcomputing the delay margin Moreover using the augmentedequation a simple root sensitivity test has been developed todetermine the direction of the root transition
The effect of PI controller gains on the delay marginhas been investigated The theoretical results indicate thatthe delay margin decreases as the integral gain increasesfor a given proportional gain Such a decrease in delaymargin implies a less stable AVR system Moreover it hasbeen observed that the compensation of the AVR systemwith a stabilizing transformer remarkably increases the delay
8 Mathematical Problems in Engineering
0 20 40 60 80 100
0
05
1
15
2
25
3
Time (s)
minus1
minus05
120591 = 274
120591 = 3
120591 = 2876
Gen
erat
or te
rmin
al v
olta
geVt
(pu)
(a)
0 2 4 6 8 10 12 14 16 18 20
0
05
1
15
2
25
3
Time (s)
minus1
minus05
120591 = 01554
120591 = 0 14
120591 = 017
Gen
erat
or te
rmin
al v
olta
geVt
(pu)
(b)
Figure 4 Voltage response of the AVR system for 119870119875= 07 and 119870
119868= 08 sminus1 (a) with a stabilizing transformer and 120591 = 274 2876 and 30 s
and (b) without a stabilizing transformer and 120591 = 014 01554 and 017 s
0 2 4 6 8 10 12 14 16 18 20
0
05
1
15
2
25
Time (s)
Without a stabilizing transformerWith a stabilizing transformer
minus05
Gen
erat
or te
rmin
al v
olta
geVt
(pu)
(a)
0 2 4 6 8 10 12 14 16 18 20
0
05
1
15
2
25
3
Time (s)
minus1
minus05Gen
erat
or te
rmin
al v
olta
geVt
(pu)
Without a stabilizing transformerWith a stabilizing transformer
(b)
Figure 5 Voltage response of the AVR system with and without a stabilizing transformer for 119870119875= 07 and 119870
119868= 08 sminus1 (a) 120591 = 01554 s (b)
120591 = 017 s
margin of the system which indicates a more stable AVRsystem
Theoretical delay margin results have been verified bycarrying out simulation studies It has been observed thatthe proposed method correctly estimates the delay margin ofthe AVR system Additionally with the help of simulations ithas been shown that the stabilizing transformer significantlyimproves the system dynamic performance by damping theoscillations
With the help of the results presented controller gainscould be properly selected such that the excitation controlsystem will be stable and will have a desired dampingperformance even if certain amount of time delays exists inthe system
The following studies have been put in perspective asfuture work (i) the extension of the proposed methodinto multimachine power systems with commensurate timedelays (ii) the influence of power system stabilizer (PSS)
Mathematical Problems in Engineering 9
on the delay margin and (iii) the probabilistic evaluation ofdelay margin as to take into account random nature of timedelays
Appendix
The coefficients of polynomials 119875(119904) and 119876(119904) given in (5) interms of gains and time constants of the AVR system
1199016= 119879119860119879119864119879119865119879119866119879119877
1199015= 119879119860119879119864119879119865119879119866
+ 119879119877(119879119860119879119864119879119865+ 119879119860119879119864119879119866+ 119879119860119879119865119879119866+ 119879119864119879119865119879119866)
1199014= 119879119860119879119864119879119865+ 119879119860119879119864119879119866+ 119879119860119879119865119879119866+ 119879119864119879119865119879119866
+ 119879119877(119879119860119879119864+ 119879119860119879119865+ 119879119864119879119865+ 119879119860119879119866+ 119879119864119879119866
+119879119865119879119866+ 119870119860119870119864119870119875119870119865119879119866)
1199013= 119879119860119879119864+ 119879119860119879119865+ 119879119864119879119865+ 119879119860119879119866+ 119879119864119879119866
+ 119879119865119879119866+ 119870119860119870119864119870119875119870119865119879119866
+ 119879119877(119879119860+ 119879119864+ 119879119865+ 119870119860119870119864119870119875119870119865
+119870119860119870119864119870119868119870119865119879119866+ 119879119866)
1199012= 119879119860+ 119879119864+ 119879119865+ 119870119860119870119864119870119875119870119865+ 119870119860119870119864119870119868119870119865119879119866+ 119879119866
+ 119879119877(119870119860119870119864119870119868119870119865+ 1)
1199011= 1 + 119870
119860119870119864119870119868119870119865
1199022= 119870119860119870119864119870119875119870119866119870119877119879119865
1199021= 119870119860119870119864119870119866119870119877(119870119875+ 119870119868119879119865)
1199020= 119870119860119870119864119870119868119870119866119870119877
(A1)
The coefficients of the polynomial119882(1205962
119888) given in (10)
11990512
= 1199012
6 119905
10= 1199012
5minus 211990141199016
1199058= 1199012
4minus 211990131199015+ 211990121199016
1199056= 1199012
3minus 211990121199014+ 211990111199015
1199054= 1199012
2minus 211990111199013minus 1199022
2
1199052= 1199012
1minus 1199022
1+ 211990201199022 119905
0= minus1199022
0
(A2)
The coefficients of the analytical formula given in (12)
1198868= minus11990161199022 119886
7= 11990161199021minus 11990151199022
1198866= 11990141199022+ 11990161199020minus 11990151199021
1198865= minus11990141199021+ 11990131199022+ 11990151199020
1198864= minus11990121199022minus 11990141199020+ 11990131199021
1198863= 11990121199021minus 11990111199022minus 11990131199020
1198862= 11990121199020minus 11990111199021
1198861= 11990111199020 119886
0= 0
(A3)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] P Kundur Power System Stability and Control McGraw-HillNew York NY USA 1994
[2] IEEE Standard 4215 IEEE Recommended Practice for ExcitationSystem Models for Power System Stability Studies IEEE PowerEngineering Society 2005
[3] A G Phadke ldquoSynchronized phasor measurements in powersystemsrdquo IEEE Computer Applications in Power vol 6 no 2 pp10ndash15 1993
[4] B Naduvathuparambil M C Venti and A Feliachi ldquoCom-munication delays in wide area measurement systemsrdquo inProceedings of the 34th Southeastern Symposium on SystemTheory vol 1 pp 118ndash122 University of Alabama March 2002
[5] S Bhowmik K Tomsovic and A Bose ldquoCommunicationmod-els for third party load frequency controlrdquo IEEE Transactions onPower Systems vol 19 no 1 pp 543ndash548 2004
[6] M Liu L Yang D Gan D Wang F Gao and Y Chen ldquoThestability of AGC systems with commensurate delaysrdquo EuropeanTransactions on Electrical Power vol 17 no 6 pp 615ndash627 2007
[7] H Wu K S Tsakalis and G T Heydt ldquoEvaluation of timedelay effects to wide area power system stabilizer designrdquo IEEETransactions on Power Systems vol 19 no 4 pp 1935ndash19412004
[8] X Yu and K Tomsovic ldquoApplication of linear matrix inequal-ities for load frequency control with communication delaysrdquoIEEETransactions on Power Systems vol 19 no 3 pp 1508ndash15152004
[9] L Jiang W Yao Q H Wu J Y Wen and S J Cheng ldquoDelay-dependent stability for load frequency control with constantand time-varying delaysrdquo IEEE Transactions on Power Systemsvol 27 no 2 pp 932ndash941 2012
[10] J Quanyuan Z Zhenyu and C Yijia ldquoWide-area TCSCcontroller design in consideration of feedback signalsrsquo timedelaysrdquo in Proceedings of the IEEE Power Engineering SocietyGeneralMeeting pp 1676ndash1680 San Francisco Calif USA June2005
[11] J Luque J I Escudero and F Perez ldquoAnalytic model of themeasurement errors caused by communications delayrdquo IEEETransactions on Power Delivery vol 17 no 2 pp 334ndash337 2002
[12] S P Carullo and C O Nwankpa ldquoExperimental validation ofa model for an information-embedded power systemrdquo IEEETransactions on Power Delivery vol 20 no 3 pp 1853ndash18632005
10 Mathematical Problems in Engineering
[13] C-W Park and W-H Kwon ldquoTime-delay compensation forinduction motor vector control systemrdquo Electric Power SystemsResearch vol 68 no 3 pp 238ndash247 2004
[14] H Okuno and T Fujii ldquoDelayed feedback controlled powersystemrdquo in Proceedings of the SICE Annual Conference pp2659ndash2663 August 2005
[15] H-K Chen T-N Lin and J-H Chen ldquoDynamic analysiscontrolling chaos and chaotification of a SMIB power systemrdquoChaos Solitons and Fractals vol 24 no 5 pp 1307ndash1315 2005
[16] H Jia X Yu Y Yu and C Wang ldquoPower system smallsignal stability region with time delayrdquo International Journal ofElectrical Power and Energy Systems vol 30 no 1 pp 16ndash222008
[17] S Ayasun ldquoComputation of time delay margin for power sys-tem small-signal stabilityrdquo European Transactions on ElectricalPower vol 19 no 7 pp 949ndash968 2009
[18] J Chen G Gu and C N Nett ldquoA new method for computingdelay margins for stability of linear delay systemsrdquo Systems andControl Letters vol 26 no 2 pp 107ndash117 1995
[19] K Gu V L Kharitonov and J Chen Stability of Time DelaySystems Birkhaauser Boston Mass USA 2003
[20] P Fu S-I Niculescu and J Chen ldquoStability of linear neutraltime-delay systems exact conditions via matrix pencil solu-tionsrdquo IEEE Transactions on Automatic Control vol 51 no 6pp 1063ndash1069 2006
[21] K Walton and J E Marshall ldquoDirect method for TDS stabilityanalysisrdquo IEE Proceedings D Control Theory and Applicationsvol 134 no 2 pp 101ndash107 1987
[22] J-H Su ldquoAsymptotic stability of linear autonomous systemswith commensurate time delaysrdquo IEEE Transactions on Auto-matic Control vol 40 no 6 pp 1114ndash1117 1995
[23] J Louisell ldquoAmatrixmethod for determining the imaginary axiseigenvalues of a delay systemrdquo IEEE Transactions on AutomaticControl vol 46 no 12 pp 2008ndash2012 2001
[24] Z V Rekasius ldquoA stability test for systems with delaysrdquo inProceedings of Joint Automatic Control Conference paper noTP9-A 1980
[25] N Olgac and R Sipahi ldquoAn exact method for the stabilityanalysis of time-delayed linear time-invariant (LTI) systemsrdquoIEEE Transactions on Automatic Control vol 47 no 5 pp 793ndash797 2002
[26] H Fazelinia R Sipahi and N Olgac ldquoStability robustness anal-ysis of multiple time-delayed systems using ldquobuilding blockrdquoconceptrdquo IEEE Transactions on Automatic Control vol 52 no5 pp 799ndash810 2007
[27] R Sipahi and N Olgac ldquoA comparative survey in determiningthe imaginary characteristic roots of LTI time delayed systemsrdquoin Proceedings of the 16th IFAC World Congress vol 16 p 635Prague Czech Republic July 2005
[28] MATLAB High-Performance Numeric Computation and Visu-alization Software The Mathworks Natick Mass USA 2001
[29] S Ayasun and A Gelen ldquoStability analysis of a generator exci-tation control system with time delaysrdquo Electrical Engineeringvol 91 no 6 pp 347ndash355 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
Substituting 119875(119904) and 119876(119904) polynomials given in (5) into(9) we could obtain the following 12th order augmentedcharacteristic equation or polynomial
119882(1205962
119888) = 1199051212059612
119888+ 1199051012059610
119888+ 11990581205968
119888+ 11990561205966
119888
+ 11990541205964
119888+ 11990521205962
119888+ 1199050= 0
(10)
where the coefficients 1199050 1199052 1199054 1199056 1199058 11990510 11990512
are real-valuedand given in the Appendix
Please note that transcendental characteristic equationwith single delay given in (4) is now converted into apolynomial without the transcendentality given by (10) andits positive real roots coincide with the imaginary roots of(4) exactly The roots of this polynomial might easily bedetermined by standard methods Depending on the roots of(10) the following situation may occur
(i) The polynomial of (10) may not have any positive realroots which implies that the characteristic equationof (4) does not have any roots on the 119895120596-axis In thatcase the system is stable for all 120591 ge 0 indicating thatthe system is delay-independent stable
(ii) The polynomial of (10) may have at least one positivereal root which implies that the characteristic equa-tion of (4) has at least a pair of complex eigenvalues onthe 119895120596-axis In that case the system is delay-dependentstable
For a positive real root (120596119888) of (10) the corresponding value
of delay margin 120591lowast can be easily obtained using (7) as [21]
120591lowast=
1
120596119888
Tanminus1 (Im 119875 (119895120596
119888) 119876 (119895120596
119888)
Re minus119875 (119895120596119888) 119876 (119895120596
119888)
) +2119903120587
120596119888
119903 = 0 1 2 infin
(11)
By substituting the polynomial of 119875(119904) and 119876(119904) given in (5)the analytical formula for computing the delaymargin ofAVRsystem is determined as
120591lowast=
1
120596119888
Tanminus1 (11988671205967
119888+ 11988651205965
119888+ 11988631205963
119888+ 1198861120596119888
11988681205968119888+ 11988661205966119888+ 11988641205964119888+ 11988621205962119888+ 1198860
)
+2119903120587
120596119888
119903 = 0 1 2 infin
(12)
where the coefficients 119886119894 119894 = 0 1 8 are real-valued and
given in the AppendixFor the positive roots of (10) we also need to check if
at 119904 = 119895120596119888 the root of (4) crosses the imaginary axis with
increasing 120591This can be determined by the sign of Re[119889119904119889120591]The necessary condition for the existence of roots crossingthe imaginary axis is that the critical characteristic rootscross the imaginary axis with nonzero velocity (transversalitycondition) that is
Re [ 119889119904
119889120591]
119904=119895120596119888
= 0 (13)
where Re(sdot) denotes the real part of a complex variable Thesign of root sensitivity is defined as root tendency (RT)
RT|119904=119895120596119888
= sgnRe [ 119889119904
119889120591]
119904=119895120596119888
(14)
By taking the derivative of (4) with respect to 120591 and noticingthat 119904 is an explicit function of 120591 we obtain
119889119904
119889120591=
119876 (119904) 119904119890minus119904120591
1198751015840 (119904) + 1198761015840 (119904) 119890minus119904120591 minus 119876 (119904) 120591119890minus119904120591 (15)
where 1198751015840(119904) and 119876
1015840(119904) denote the first-order derivatives of
119875(119904) and119876(119904)with respect to 119904 respectively Using (4) we canrewrite this expression as
119889119904
119889120591= minus119904[
1198751015840(119904)
119875 (119904)minus
1198761015840(119904)
119876 (119904)+ 120591]
minus1
(16)
We can get the corresponding root tendency by evaluating(16) at 119904 = 119895120596
119888
RT|119904=119895120596119888
= minus sgn[Re(119895120596119888(1198751015840(119895120596119888)
119875(119895120596119888)minus
1198761015840(119895120596119888)
119876(119895120596119888)+ 120591)
minus1
)]
= minus sgn[Re( 1
119895120596119888
(1198751015840(119895120596119888)
119875 (119895120596119888)
minus1198761015840(119895120596119888)
119876 (119895120596119888)
+ 120591))]
= sgn[Im(1
120596119888
(1198761015840(119895120596119888)
119876 (119895120596119888)
minus1198751015840(119895120596119888)
119875 (119895120596119888)))]
(17)
Itmust be noted that the root tendency is independent of timedelay 120591 This implies that even though there are an infinitenumber of values of 120591 associated with each value of 120596
119888that
makes Δ(119895120596119888 120591) = 0 the behavior of the roots at these points
will always be the same It can be easily shown by furthersimplifications of (17) that RT information can be deducedtrivially from the polynomial 119882(120596
2
119888) in (10) Recalling that
119904 = 119895120596119888 we have 119882(120596
2
119888) = 0 Then from (9) we have
119876(119895120596119888) = 119875(119895120596
119888)119875(minus119895120596
119888)119876(minus119895120596
119888) Thus
RT|119904=119895120596119888
= sgn[Im(1
120596119888
(1198761015840(119895120596119888) 119876 (minus119895120596
119888)
119875 (119895120596119888) 119875 (minus119895120596
119888)
minus1198751015840(119895120596119888)
119875 (119895120596119888)))]
= sgn[Im(1
120596119888
(1198761015840(119895120596119888) 119876 (minus119895120596
119888)minus1198751015840(119895120596119888) 119875 (minus119895120596
119888)
119875 (119895120596119888) 119875 (minus119895120596
119888)
))]
= sgn [Im(1
120596119888
(1198761015840(119895120596119888) 119876 (minus119895120596
119888) minus 1198751015840(119895120596119888) 119875 (minus119895120596
119888)))]
(18)
6 Mathematical Problems in Engineering
since 119875(119895120596119888)119875(minus119895120596
119888) = |119875(119895120596
119888)|2
gt 0 Finally using theproperty Im(119911) = (119911 minus 119911)2119895 for any complex number 119911 wehave
RT|119904=119895120596119888
= sgn 1
2119895120596119888
times [(1198761015840(119895120596119888) 119876 (minus119895120596
119888) minus 119876 (119895120596
119888) 1198761015840(minus119895120596119888)
minus1198751015840(119895120596119888) 119875 (minus119895120596
119888) + 119875 (119895120596
119888) 1198751015840(minus119895120596119888))]
(19)
which finally leads us to
RT|119904=119895120596119888
= sgn [1198821015840(1205962
119888)] (20)
where the prime represents differentiation with respect to1205962
119888
The evaluation of the root sensitivities with respect to thetime delay is unique feature of the proposed method Thisexpression gives a simple criterion to determine the directionof transition of the roots at 119904 = 119895120596
119888as 120591 increases from
1205911
= 120591lowastminus Δ120591 to 120591
2= 120591lowast+ Δ120591 0 lt Δ120591 ≪ 1 as shown in
Figure 3The root 119904 = 119895120596119888crosses the imaginary axis either to
unstable right half plane when RT = +1 or to stable left halfplane when RT = minus1
For the excitation control system the root tendency foreach crossing frequency could be easily determined by thefollowing expression obtained by taking the derivative of thepolynomial given in (10) with respect to 120596
2
119888
RT|119904=119895120596119888
= 61199051212059610
119888+ 5119905101205968
119888+ 411990581205966
119888
+ 311990561205964
119888+ 211990541205962
119888+ 1199052
(21)
Itmust be noted here that the polynomial of (10)mayhavemultiple but finite number of positive real roots for all 120591 isin
R+ Let us call this set
120596119888 = 120596
1198881 1205961198882 120596
119888q (22)
This finite number 119902 is influenced not only by the systemorder but also by the coefficients of polynomials 119875(119904) and119876(119904) Furthermore for each 120596
119888119898 119898 = 1 2 119902 we can get
infinitely many periodically spaced 120591lowast
119898values by using (12)
Let us call this set
120591lowast
119898 = 120591
lowast
1198981 120591lowast
1198982 120591
lowast
119898infin 119898 = 1 2 119902 (23)
where 120591119898119903+1
minus 120591119898119903
= 2120587120596119888is the apparent period of
repetition According to the definition of delay margin theminimum of 120591
lowast
119898 119898 = 1 2 119902 will be the system delay
margin
120591lowast= min (120591
lowast
119898) (24)
4 Results and Discussion
41 Theoretical Results In this section the delay margin 120591lowast
for stability for awide range of PI controller gains is computedusing the expression given in (12) Theoretical delay margin
results are verified by using MatlabSimulink The gains andtime constants of the exciter control system used in theanalysis are as follows
119879119860= 01 s 119879
119864= 04 s 119879
119866= 10 s
119879119877= 005 s 119879
119865= 004 s
119870119860= 5 119870
119864= 119870119866= 119870119877= 10 119870
119865= 20
(25)
First we choose typical PI controller gains119870119875= 07 119870
119868=
08 sminus1 to demonstrate the delay margin computation Theprocess of the delay margin computation consists of thefollowing four steps
Step 1 Determine the characteristic equation of time-delayedexcitation control system using (4) and (5) This equation isfound to be
Δ (119904 120591) = (8 times 10minus51199046+ 00047119904
5+ 04416119904
4
+ 78171199043+ 1699119904
2+ 90119904)
+ (0141199042+ 366119904 + 4) 119890
minus119904120591= 0
(26)
Note that for 120591 = 0 the characteristic equation of the delay-free system has roots at 119904
12= minus19035 plusmn 11989565838 119904
34=
minus0501 plusmn 11989504095 1199045
= minus180155 1199046
= minus14121 whichindicates that the delay-free system is stable
Step 2 Construct the119882(1205962
119888)polynomial using (10) and com-
pute its real positive roots 120596119888119898 if they exist The polynomial
is computed as
119882(1205962
119888) = 64 times 10
minus912059612
119888minus 48754 times 10
minus512059610
119888+ 01189120596
8
119888
+ 5609301205966
119888+ 1369545120596
4
119888+ 687244120596
2
119888
minus 16 = 0
(27)
It is found that this polynomial has only one positive real rootThis positive real root is found to be 120596
119888= 04131 rads
Step 3 Compute the delay margin for each positive rootfound in Step 2 using (12) and select the minimum of those asthe system delaymargin for this PI controller gainsThe delaymargin is computed as 120591lowast = 28760 s
Step 4 Determine the root tendency (RT) for each positiveroot120596
119888119898using (21)TheRT for120596
119888= 04131 rads is computed
as RT = +1 This RT indicates that a pair of complex rootspasses from stable half plane to unstable half plane crossing119895120596-axis 119904 = plusmn11989504131 rads for 120591lowast = 28760 s and the systembecomes unstable
For the theoretical analysis the effect of PI controllergains on the delay margin is also investigated Table 1shows delay margins of the AVR system with a stabilizingtransformer for the range of 119870
119875= 03ndash07 and 119870
119868= 01ndash
10 sminus1 It is clear from Table 1 that the delay margin decreases
Mathematical Problems in Engineering 7
Table 1 Delay margins 120591lowast for different values of 119870119868and 119870
119875of the
AVR system with a stabilizing transformer
119870119868(sminus1) 120591
lowast (s)119870119875= 03 119870
119875= 05 119870
119875= 07
01 54172 44662 3810802 40532 39038 3651503 35181 35078 3423404 32443 32645 3240305 30813 31073 3105906 29745 29996 3007107 28997 29223 2933008 28446 28645 2876009 28026 28199 2831210 27694 27846 27952
as the integral gain increases when 119870119875is fixed In order to
find out the quantitative impact of the stabilizing transformeron the delay margin delay margins are also obtained for thecase in which a stabilizing transformer is not used in the AVRsystem [29] Table 2 shows delay margins of the AVR systemwithout a stabilizing transformer It is clear from Tables 1and 2 that compensation of the AVR system by a stabilizingtransformer significantly increases the delay margins for allvalues of PI controller gains which makes the AVR systemmore stable For example for 119870
119875= 07 and 119870
119868= 08 sminus1 the
delay margin when a stabilizing transformer is not includedis found to be 120591
lowast= 01554 s while it is 120591
lowast= 28760 s
when a stabilizing transformer is included This is obviouslya significant improvement in the stability performance of theAVR system This observation is valid for all values of PIcontroller gains as indicated in Tables 1 and 2
42 Verification of Theoretical Delay Margin Results Mat-labSimulink is used to verify the theoretical results on thedelaymargin and to illustrate how the stabilizing transformerdamps the oscillations in the presence of time delays For theillustrative purpose PI controller gains are chosen as 119870
119875=
07 and 119870119868= 08 sminus1 From Table 1 for these gains the delay
margin is found to be 120591lowast
= 28760 s when the stabilizingtransformer is included Simulation result for this delay valueis shown in Figure 4(a) It is clear that sustained oscillationsare observed indicating a marginally stable operation Whenthe time delay is less than the delay margin it is expected thatthe exciter systemwill be stable Figure 4(a) also shows such asimulation result for 120591 = 274 s Similarly when the time delayis larger than the delay margin the system will have growingoscillations indicating an unstable operation as illustratedin Figure 4(a) for 120591 = 30 s These simulation results showthat the theoretical method correctly estimates the delaymargin of the AVR system compensated by a stabilizingtransformer Moreover the voltage response of the AVRsystem not including a stabilizing transformer is presentedin Figure 4(b) indicating the same type of dynamic behavior
Table 2 Delay margins 120591lowast for different values of 119870119868and 119870
119875of the
AVR system without a stabilizing transformer
119870119868(sminus1) 120591
lowast (s)119870119875= 03 119870
119875= 05 119870
119875= 07
01 14164 06275 0365202 09700 05471 0334903 06781 04665 0303704 04831 03912 0272205 03459 03235 0241106 02447 02639 0211107 01674 02118 0182508 01066 01664 0155409 00576 01267 0130010 00174 00920 01063
as the AVR system including a stabilizing transformer with asmaller delay margin (120591lowast = 01554 s)
The damping effect of the stabilizing transformer couldbe easily illustrated by time-domain simulations Figure 5(a)compares the voltage response of the AVR system with andwithout a stabilizing transformer for 120591lowast = 01554 s It is clearthat theAVR systemnot including the stabilizing transformeris marginally stable or on the stability boundary havingsustained oscillations while the AVR system compensated bya stabilizing transformer has a response with quickly dampedoscillations Similarly Figure 5(b) shows the voltage responseof the AVR system with and without the stabilizing trans-former for 120591 = 017 s When the stabilizing transformer isnot considered the system is unstable since 120591 = 017 s gt 120591
lowast=
01554 s and growing oscillations are observed However theaddition of the stabilizing transformer damps the oscillationsand makes the excitation control system stable
5 Conclusions
This paper has proposed an exact method to compute thedelay margin for stability of the AVR system including astabilizing transformer The method first eliminates the tran-scendental term in the characteristic equation without usingany approximation The resulting augmented equation hasbecome a regular polynomial whose real roots coincide withthe imaginary roots of the characteristic equation exactlyAn expression in terms of system parameters and imaginaryroots of the characteristic equation has been derived forcomputing the delay margin Moreover using the augmentedequation a simple root sensitivity test has been developed todetermine the direction of the root transition
The effect of PI controller gains on the delay marginhas been investigated The theoretical results indicate thatthe delay margin decreases as the integral gain increasesfor a given proportional gain Such a decrease in delaymargin implies a less stable AVR system Moreover it hasbeen observed that the compensation of the AVR systemwith a stabilizing transformer remarkably increases the delay
8 Mathematical Problems in Engineering
0 20 40 60 80 100
0
05
1
15
2
25
3
Time (s)
minus1
minus05
120591 = 274
120591 = 3
120591 = 2876
Gen
erat
or te
rmin
al v
olta
geVt
(pu)
(a)
0 2 4 6 8 10 12 14 16 18 20
0
05
1
15
2
25
3
Time (s)
minus1
minus05
120591 = 01554
120591 = 0 14
120591 = 017
Gen
erat
or te
rmin
al v
olta
geVt
(pu)
(b)
Figure 4 Voltage response of the AVR system for 119870119875= 07 and 119870
119868= 08 sminus1 (a) with a stabilizing transformer and 120591 = 274 2876 and 30 s
and (b) without a stabilizing transformer and 120591 = 014 01554 and 017 s
0 2 4 6 8 10 12 14 16 18 20
0
05
1
15
2
25
Time (s)
Without a stabilizing transformerWith a stabilizing transformer
minus05
Gen
erat
or te
rmin
al v
olta
geVt
(pu)
(a)
0 2 4 6 8 10 12 14 16 18 20
0
05
1
15
2
25
3
Time (s)
minus1
minus05Gen
erat
or te
rmin
al v
olta
geVt
(pu)
Without a stabilizing transformerWith a stabilizing transformer
(b)
Figure 5 Voltage response of the AVR system with and without a stabilizing transformer for 119870119875= 07 and 119870
119868= 08 sminus1 (a) 120591 = 01554 s (b)
120591 = 017 s
margin of the system which indicates a more stable AVRsystem
Theoretical delay margin results have been verified bycarrying out simulation studies It has been observed thatthe proposed method correctly estimates the delay margin ofthe AVR system Additionally with the help of simulations ithas been shown that the stabilizing transformer significantlyimproves the system dynamic performance by damping theoscillations
With the help of the results presented controller gainscould be properly selected such that the excitation controlsystem will be stable and will have a desired dampingperformance even if certain amount of time delays exists inthe system
The following studies have been put in perspective asfuture work (i) the extension of the proposed methodinto multimachine power systems with commensurate timedelays (ii) the influence of power system stabilizer (PSS)
Mathematical Problems in Engineering 9
on the delay margin and (iii) the probabilistic evaluation ofdelay margin as to take into account random nature of timedelays
Appendix
The coefficients of polynomials 119875(119904) and 119876(119904) given in (5) interms of gains and time constants of the AVR system
1199016= 119879119860119879119864119879119865119879119866119879119877
1199015= 119879119860119879119864119879119865119879119866
+ 119879119877(119879119860119879119864119879119865+ 119879119860119879119864119879119866+ 119879119860119879119865119879119866+ 119879119864119879119865119879119866)
1199014= 119879119860119879119864119879119865+ 119879119860119879119864119879119866+ 119879119860119879119865119879119866+ 119879119864119879119865119879119866
+ 119879119877(119879119860119879119864+ 119879119860119879119865+ 119879119864119879119865+ 119879119860119879119866+ 119879119864119879119866
+119879119865119879119866+ 119870119860119870119864119870119875119870119865119879119866)
1199013= 119879119860119879119864+ 119879119860119879119865+ 119879119864119879119865+ 119879119860119879119866+ 119879119864119879119866
+ 119879119865119879119866+ 119870119860119870119864119870119875119870119865119879119866
+ 119879119877(119879119860+ 119879119864+ 119879119865+ 119870119860119870119864119870119875119870119865
+119870119860119870119864119870119868119870119865119879119866+ 119879119866)
1199012= 119879119860+ 119879119864+ 119879119865+ 119870119860119870119864119870119875119870119865+ 119870119860119870119864119870119868119870119865119879119866+ 119879119866
+ 119879119877(119870119860119870119864119870119868119870119865+ 1)
1199011= 1 + 119870
119860119870119864119870119868119870119865
1199022= 119870119860119870119864119870119875119870119866119870119877119879119865
1199021= 119870119860119870119864119870119866119870119877(119870119875+ 119870119868119879119865)
1199020= 119870119860119870119864119870119868119870119866119870119877
(A1)
The coefficients of the polynomial119882(1205962
119888) given in (10)
11990512
= 1199012
6 119905
10= 1199012
5minus 211990141199016
1199058= 1199012
4minus 211990131199015+ 211990121199016
1199056= 1199012
3minus 211990121199014+ 211990111199015
1199054= 1199012
2minus 211990111199013minus 1199022
2
1199052= 1199012
1minus 1199022
1+ 211990201199022 119905
0= minus1199022
0
(A2)
The coefficients of the analytical formula given in (12)
1198868= minus11990161199022 119886
7= 11990161199021minus 11990151199022
1198866= 11990141199022+ 11990161199020minus 11990151199021
1198865= minus11990141199021+ 11990131199022+ 11990151199020
1198864= minus11990121199022minus 11990141199020+ 11990131199021
1198863= 11990121199021minus 11990111199022minus 11990131199020
1198862= 11990121199020minus 11990111199021
1198861= 11990111199020 119886
0= 0
(A3)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] P Kundur Power System Stability and Control McGraw-HillNew York NY USA 1994
[2] IEEE Standard 4215 IEEE Recommended Practice for ExcitationSystem Models for Power System Stability Studies IEEE PowerEngineering Society 2005
[3] A G Phadke ldquoSynchronized phasor measurements in powersystemsrdquo IEEE Computer Applications in Power vol 6 no 2 pp10ndash15 1993
[4] B Naduvathuparambil M C Venti and A Feliachi ldquoCom-munication delays in wide area measurement systemsrdquo inProceedings of the 34th Southeastern Symposium on SystemTheory vol 1 pp 118ndash122 University of Alabama March 2002
[5] S Bhowmik K Tomsovic and A Bose ldquoCommunicationmod-els for third party load frequency controlrdquo IEEE Transactions onPower Systems vol 19 no 1 pp 543ndash548 2004
[6] M Liu L Yang D Gan D Wang F Gao and Y Chen ldquoThestability of AGC systems with commensurate delaysrdquo EuropeanTransactions on Electrical Power vol 17 no 6 pp 615ndash627 2007
[7] H Wu K S Tsakalis and G T Heydt ldquoEvaluation of timedelay effects to wide area power system stabilizer designrdquo IEEETransactions on Power Systems vol 19 no 4 pp 1935ndash19412004
[8] X Yu and K Tomsovic ldquoApplication of linear matrix inequal-ities for load frequency control with communication delaysrdquoIEEETransactions on Power Systems vol 19 no 3 pp 1508ndash15152004
[9] L Jiang W Yao Q H Wu J Y Wen and S J Cheng ldquoDelay-dependent stability for load frequency control with constantand time-varying delaysrdquo IEEE Transactions on Power Systemsvol 27 no 2 pp 932ndash941 2012
[10] J Quanyuan Z Zhenyu and C Yijia ldquoWide-area TCSCcontroller design in consideration of feedback signalsrsquo timedelaysrdquo in Proceedings of the IEEE Power Engineering SocietyGeneralMeeting pp 1676ndash1680 San Francisco Calif USA June2005
[11] J Luque J I Escudero and F Perez ldquoAnalytic model of themeasurement errors caused by communications delayrdquo IEEETransactions on Power Delivery vol 17 no 2 pp 334ndash337 2002
[12] S P Carullo and C O Nwankpa ldquoExperimental validation ofa model for an information-embedded power systemrdquo IEEETransactions on Power Delivery vol 20 no 3 pp 1853ndash18632005
10 Mathematical Problems in Engineering
[13] C-W Park and W-H Kwon ldquoTime-delay compensation forinduction motor vector control systemrdquo Electric Power SystemsResearch vol 68 no 3 pp 238ndash247 2004
[14] H Okuno and T Fujii ldquoDelayed feedback controlled powersystemrdquo in Proceedings of the SICE Annual Conference pp2659ndash2663 August 2005
[15] H-K Chen T-N Lin and J-H Chen ldquoDynamic analysiscontrolling chaos and chaotification of a SMIB power systemrdquoChaos Solitons and Fractals vol 24 no 5 pp 1307ndash1315 2005
[16] H Jia X Yu Y Yu and C Wang ldquoPower system smallsignal stability region with time delayrdquo International Journal ofElectrical Power and Energy Systems vol 30 no 1 pp 16ndash222008
[17] S Ayasun ldquoComputation of time delay margin for power sys-tem small-signal stabilityrdquo European Transactions on ElectricalPower vol 19 no 7 pp 949ndash968 2009
[18] J Chen G Gu and C N Nett ldquoA new method for computingdelay margins for stability of linear delay systemsrdquo Systems andControl Letters vol 26 no 2 pp 107ndash117 1995
[19] K Gu V L Kharitonov and J Chen Stability of Time DelaySystems Birkhaauser Boston Mass USA 2003
[20] P Fu S-I Niculescu and J Chen ldquoStability of linear neutraltime-delay systems exact conditions via matrix pencil solu-tionsrdquo IEEE Transactions on Automatic Control vol 51 no 6pp 1063ndash1069 2006
[21] K Walton and J E Marshall ldquoDirect method for TDS stabilityanalysisrdquo IEE Proceedings D Control Theory and Applicationsvol 134 no 2 pp 101ndash107 1987
[22] J-H Su ldquoAsymptotic stability of linear autonomous systemswith commensurate time delaysrdquo IEEE Transactions on Auto-matic Control vol 40 no 6 pp 1114ndash1117 1995
[23] J Louisell ldquoAmatrixmethod for determining the imaginary axiseigenvalues of a delay systemrdquo IEEE Transactions on AutomaticControl vol 46 no 12 pp 2008ndash2012 2001
[24] Z V Rekasius ldquoA stability test for systems with delaysrdquo inProceedings of Joint Automatic Control Conference paper noTP9-A 1980
[25] N Olgac and R Sipahi ldquoAn exact method for the stabilityanalysis of time-delayed linear time-invariant (LTI) systemsrdquoIEEE Transactions on Automatic Control vol 47 no 5 pp 793ndash797 2002
[26] H Fazelinia R Sipahi and N Olgac ldquoStability robustness anal-ysis of multiple time-delayed systems using ldquobuilding blockrdquoconceptrdquo IEEE Transactions on Automatic Control vol 52 no5 pp 799ndash810 2007
[27] R Sipahi and N Olgac ldquoA comparative survey in determiningthe imaginary characteristic roots of LTI time delayed systemsrdquoin Proceedings of the 16th IFAC World Congress vol 16 p 635Prague Czech Republic July 2005
[28] MATLAB High-Performance Numeric Computation and Visu-alization Software The Mathworks Natick Mass USA 2001
[29] S Ayasun and A Gelen ldquoStability analysis of a generator exci-tation control system with time delaysrdquo Electrical Engineeringvol 91 no 6 pp 347ndash355 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
since 119875(119895120596119888)119875(minus119895120596
119888) = |119875(119895120596
119888)|2
gt 0 Finally using theproperty Im(119911) = (119911 minus 119911)2119895 for any complex number 119911 wehave
RT|119904=119895120596119888
= sgn 1
2119895120596119888
times [(1198761015840(119895120596119888) 119876 (minus119895120596
119888) minus 119876 (119895120596
119888) 1198761015840(minus119895120596119888)
minus1198751015840(119895120596119888) 119875 (minus119895120596
119888) + 119875 (119895120596
119888) 1198751015840(minus119895120596119888))]
(19)
which finally leads us to
RT|119904=119895120596119888
= sgn [1198821015840(1205962
119888)] (20)
where the prime represents differentiation with respect to1205962
119888
The evaluation of the root sensitivities with respect to thetime delay is unique feature of the proposed method Thisexpression gives a simple criterion to determine the directionof transition of the roots at 119904 = 119895120596
119888as 120591 increases from
1205911
= 120591lowastminus Δ120591 to 120591
2= 120591lowast+ Δ120591 0 lt Δ120591 ≪ 1 as shown in
Figure 3The root 119904 = 119895120596119888crosses the imaginary axis either to
unstable right half plane when RT = +1 or to stable left halfplane when RT = minus1
For the excitation control system the root tendency foreach crossing frequency could be easily determined by thefollowing expression obtained by taking the derivative of thepolynomial given in (10) with respect to 120596
2
119888
RT|119904=119895120596119888
= 61199051212059610
119888+ 5119905101205968
119888+ 411990581205966
119888
+ 311990561205964
119888+ 211990541205962
119888+ 1199052
(21)
Itmust be noted here that the polynomial of (10)mayhavemultiple but finite number of positive real roots for all 120591 isin
R+ Let us call this set
120596119888 = 120596
1198881 1205961198882 120596
119888q (22)
This finite number 119902 is influenced not only by the systemorder but also by the coefficients of polynomials 119875(119904) and119876(119904) Furthermore for each 120596
119888119898 119898 = 1 2 119902 we can get
infinitely many periodically spaced 120591lowast
119898values by using (12)
Let us call this set
120591lowast
119898 = 120591
lowast
1198981 120591lowast
1198982 120591
lowast
119898infin 119898 = 1 2 119902 (23)
where 120591119898119903+1
minus 120591119898119903
= 2120587120596119888is the apparent period of
repetition According to the definition of delay margin theminimum of 120591
lowast
119898 119898 = 1 2 119902 will be the system delay
margin
120591lowast= min (120591
lowast
119898) (24)
4 Results and Discussion
41 Theoretical Results In this section the delay margin 120591lowast
for stability for awide range of PI controller gains is computedusing the expression given in (12) Theoretical delay margin
results are verified by using MatlabSimulink The gains andtime constants of the exciter control system used in theanalysis are as follows
119879119860= 01 s 119879
119864= 04 s 119879
119866= 10 s
119879119877= 005 s 119879
119865= 004 s
119870119860= 5 119870
119864= 119870119866= 119870119877= 10 119870
119865= 20
(25)
First we choose typical PI controller gains119870119875= 07 119870
119868=
08 sminus1 to demonstrate the delay margin computation Theprocess of the delay margin computation consists of thefollowing four steps
Step 1 Determine the characteristic equation of time-delayedexcitation control system using (4) and (5) This equation isfound to be
Δ (119904 120591) = (8 times 10minus51199046+ 00047119904
5+ 04416119904
4
+ 78171199043+ 1699119904
2+ 90119904)
+ (0141199042+ 366119904 + 4) 119890
minus119904120591= 0
(26)
Note that for 120591 = 0 the characteristic equation of the delay-free system has roots at 119904
12= minus19035 plusmn 11989565838 119904
34=
minus0501 plusmn 11989504095 1199045
= minus180155 1199046
= minus14121 whichindicates that the delay-free system is stable
Step 2 Construct the119882(1205962
119888)polynomial using (10) and com-
pute its real positive roots 120596119888119898 if they exist The polynomial
is computed as
119882(1205962
119888) = 64 times 10
minus912059612
119888minus 48754 times 10
minus512059610
119888+ 01189120596
8
119888
+ 5609301205966
119888+ 1369545120596
4
119888+ 687244120596
2
119888
minus 16 = 0
(27)
It is found that this polynomial has only one positive real rootThis positive real root is found to be 120596
119888= 04131 rads
Step 3 Compute the delay margin for each positive rootfound in Step 2 using (12) and select the minimum of those asthe system delaymargin for this PI controller gainsThe delaymargin is computed as 120591lowast = 28760 s
Step 4 Determine the root tendency (RT) for each positiveroot120596
119888119898using (21)TheRT for120596
119888= 04131 rads is computed
as RT = +1 This RT indicates that a pair of complex rootspasses from stable half plane to unstable half plane crossing119895120596-axis 119904 = plusmn11989504131 rads for 120591lowast = 28760 s and the systembecomes unstable
For the theoretical analysis the effect of PI controllergains on the delay margin is also investigated Table 1shows delay margins of the AVR system with a stabilizingtransformer for the range of 119870
119875= 03ndash07 and 119870
119868= 01ndash
10 sminus1 It is clear from Table 1 that the delay margin decreases
Mathematical Problems in Engineering 7
Table 1 Delay margins 120591lowast for different values of 119870119868and 119870
119875of the
AVR system with a stabilizing transformer
119870119868(sminus1) 120591
lowast (s)119870119875= 03 119870
119875= 05 119870
119875= 07
01 54172 44662 3810802 40532 39038 3651503 35181 35078 3423404 32443 32645 3240305 30813 31073 3105906 29745 29996 3007107 28997 29223 2933008 28446 28645 2876009 28026 28199 2831210 27694 27846 27952
as the integral gain increases when 119870119875is fixed In order to
find out the quantitative impact of the stabilizing transformeron the delay margin delay margins are also obtained for thecase in which a stabilizing transformer is not used in the AVRsystem [29] Table 2 shows delay margins of the AVR systemwithout a stabilizing transformer It is clear from Tables 1and 2 that compensation of the AVR system by a stabilizingtransformer significantly increases the delay margins for allvalues of PI controller gains which makes the AVR systemmore stable For example for 119870
119875= 07 and 119870
119868= 08 sminus1 the
delay margin when a stabilizing transformer is not includedis found to be 120591
lowast= 01554 s while it is 120591
lowast= 28760 s
when a stabilizing transformer is included This is obviouslya significant improvement in the stability performance of theAVR system This observation is valid for all values of PIcontroller gains as indicated in Tables 1 and 2
42 Verification of Theoretical Delay Margin Results Mat-labSimulink is used to verify the theoretical results on thedelaymargin and to illustrate how the stabilizing transformerdamps the oscillations in the presence of time delays For theillustrative purpose PI controller gains are chosen as 119870
119875=
07 and 119870119868= 08 sminus1 From Table 1 for these gains the delay
margin is found to be 120591lowast
= 28760 s when the stabilizingtransformer is included Simulation result for this delay valueis shown in Figure 4(a) It is clear that sustained oscillationsare observed indicating a marginally stable operation Whenthe time delay is less than the delay margin it is expected thatthe exciter systemwill be stable Figure 4(a) also shows such asimulation result for 120591 = 274 s Similarly when the time delayis larger than the delay margin the system will have growingoscillations indicating an unstable operation as illustratedin Figure 4(a) for 120591 = 30 s These simulation results showthat the theoretical method correctly estimates the delaymargin of the AVR system compensated by a stabilizingtransformer Moreover the voltage response of the AVRsystem not including a stabilizing transformer is presentedin Figure 4(b) indicating the same type of dynamic behavior
Table 2 Delay margins 120591lowast for different values of 119870119868and 119870
119875of the
AVR system without a stabilizing transformer
119870119868(sminus1) 120591
lowast (s)119870119875= 03 119870
119875= 05 119870
119875= 07
01 14164 06275 0365202 09700 05471 0334903 06781 04665 0303704 04831 03912 0272205 03459 03235 0241106 02447 02639 0211107 01674 02118 0182508 01066 01664 0155409 00576 01267 0130010 00174 00920 01063
as the AVR system including a stabilizing transformer with asmaller delay margin (120591lowast = 01554 s)
The damping effect of the stabilizing transformer couldbe easily illustrated by time-domain simulations Figure 5(a)compares the voltage response of the AVR system with andwithout a stabilizing transformer for 120591lowast = 01554 s It is clearthat theAVR systemnot including the stabilizing transformeris marginally stable or on the stability boundary havingsustained oscillations while the AVR system compensated bya stabilizing transformer has a response with quickly dampedoscillations Similarly Figure 5(b) shows the voltage responseof the AVR system with and without the stabilizing trans-former for 120591 = 017 s When the stabilizing transformer isnot considered the system is unstable since 120591 = 017 s gt 120591
lowast=
01554 s and growing oscillations are observed However theaddition of the stabilizing transformer damps the oscillationsand makes the excitation control system stable
5 Conclusions
This paper has proposed an exact method to compute thedelay margin for stability of the AVR system including astabilizing transformer The method first eliminates the tran-scendental term in the characteristic equation without usingany approximation The resulting augmented equation hasbecome a regular polynomial whose real roots coincide withthe imaginary roots of the characteristic equation exactlyAn expression in terms of system parameters and imaginaryroots of the characteristic equation has been derived forcomputing the delay margin Moreover using the augmentedequation a simple root sensitivity test has been developed todetermine the direction of the root transition
The effect of PI controller gains on the delay marginhas been investigated The theoretical results indicate thatthe delay margin decreases as the integral gain increasesfor a given proportional gain Such a decrease in delaymargin implies a less stable AVR system Moreover it hasbeen observed that the compensation of the AVR systemwith a stabilizing transformer remarkably increases the delay
8 Mathematical Problems in Engineering
0 20 40 60 80 100
0
05
1
15
2
25
3
Time (s)
minus1
minus05
120591 = 274
120591 = 3
120591 = 2876
Gen
erat
or te
rmin
al v
olta
geVt
(pu)
(a)
0 2 4 6 8 10 12 14 16 18 20
0
05
1
15
2
25
3
Time (s)
minus1
minus05
120591 = 01554
120591 = 0 14
120591 = 017
Gen
erat
or te
rmin
al v
olta
geVt
(pu)
(b)
Figure 4 Voltage response of the AVR system for 119870119875= 07 and 119870
119868= 08 sminus1 (a) with a stabilizing transformer and 120591 = 274 2876 and 30 s
and (b) without a stabilizing transformer and 120591 = 014 01554 and 017 s
0 2 4 6 8 10 12 14 16 18 20
0
05
1
15
2
25
Time (s)
Without a stabilizing transformerWith a stabilizing transformer
minus05
Gen
erat
or te
rmin
al v
olta
geVt
(pu)
(a)
0 2 4 6 8 10 12 14 16 18 20
0
05
1
15
2
25
3
Time (s)
minus1
minus05Gen
erat
or te
rmin
al v
olta
geVt
(pu)
Without a stabilizing transformerWith a stabilizing transformer
(b)
Figure 5 Voltage response of the AVR system with and without a stabilizing transformer for 119870119875= 07 and 119870
119868= 08 sminus1 (a) 120591 = 01554 s (b)
120591 = 017 s
margin of the system which indicates a more stable AVRsystem
Theoretical delay margin results have been verified bycarrying out simulation studies It has been observed thatthe proposed method correctly estimates the delay margin ofthe AVR system Additionally with the help of simulations ithas been shown that the stabilizing transformer significantlyimproves the system dynamic performance by damping theoscillations
With the help of the results presented controller gainscould be properly selected such that the excitation controlsystem will be stable and will have a desired dampingperformance even if certain amount of time delays exists inthe system
The following studies have been put in perspective asfuture work (i) the extension of the proposed methodinto multimachine power systems with commensurate timedelays (ii) the influence of power system stabilizer (PSS)
Mathematical Problems in Engineering 9
on the delay margin and (iii) the probabilistic evaluation ofdelay margin as to take into account random nature of timedelays
Appendix
The coefficients of polynomials 119875(119904) and 119876(119904) given in (5) interms of gains and time constants of the AVR system
1199016= 119879119860119879119864119879119865119879119866119879119877
1199015= 119879119860119879119864119879119865119879119866
+ 119879119877(119879119860119879119864119879119865+ 119879119860119879119864119879119866+ 119879119860119879119865119879119866+ 119879119864119879119865119879119866)
1199014= 119879119860119879119864119879119865+ 119879119860119879119864119879119866+ 119879119860119879119865119879119866+ 119879119864119879119865119879119866
+ 119879119877(119879119860119879119864+ 119879119860119879119865+ 119879119864119879119865+ 119879119860119879119866+ 119879119864119879119866
+119879119865119879119866+ 119870119860119870119864119870119875119870119865119879119866)
1199013= 119879119860119879119864+ 119879119860119879119865+ 119879119864119879119865+ 119879119860119879119866+ 119879119864119879119866
+ 119879119865119879119866+ 119870119860119870119864119870119875119870119865119879119866
+ 119879119877(119879119860+ 119879119864+ 119879119865+ 119870119860119870119864119870119875119870119865
+119870119860119870119864119870119868119870119865119879119866+ 119879119866)
1199012= 119879119860+ 119879119864+ 119879119865+ 119870119860119870119864119870119875119870119865+ 119870119860119870119864119870119868119870119865119879119866+ 119879119866
+ 119879119877(119870119860119870119864119870119868119870119865+ 1)
1199011= 1 + 119870
119860119870119864119870119868119870119865
1199022= 119870119860119870119864119870119875119870119866119870119877119879119865
1199021= 119870119860119870119864119870119866119870119877(119870119875+ 119870119868119879119865)
1199020= 119870119860119870119864119870119868119870119866119870119877
(A1)
The coefficients of the polynomial119882(1205962
119888) given in (10)
11990512
= 1199012
6 119905
10= 1199012
5minus 211990141199016
1199058= 1199012
4minus 211990131199015+ 211990121199016
1199056= 1199012
3minus 211990121199014+ 211990111199015
1199054= 1199012
2minus 211990111199013minus 1199022
2
1199052= 1199012
1minus 1199022
1+ 211990201199022 119905
0= minus1199022
0
(A2)
The coefficients of the analytical formula given in (12)
1198868= minus11990161199022 119886
7= 11990161199021minus 11990151199022
1198866= 11990141199022+ 11990161199020minus 11990151199021
1198865= minus11990141199021+ 11990131199022+ 11990151199020
1198864= minus11990121199022minus 11990141199020+ 11990131199021
1198863= 11990121199021minus 11990111199022minus 11990131199020
1198862= 11990121199020minus 11990111199021
1198861= 11990111199020 119886
0= 0
(A3)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] P Kundur Power System Stability and Control McGraw-HillNew York NY USA 1994
[2] IEEE Standard 4215 IEEE Recommended Practice for ExcitationSystem Models for Power System Stability Studies IEEE PowerEngineering Society 2005
[3] A G Phadke ldquoSynchronized phasor measurements in powersystemsrdquo IEEE Computer Applications in Power vol 6 no 2 pp10ndash15 1993
[4] B Naduvathuparambil M C Venti and A Feliachi ldquoCom-munication delays in wide area measurement systemsrdquo inProceedings of the 34th Southeastern Symposium on SystemTheory vol 1 pp 118ndash122 University of Alabama March 2002
[5] S Bhowmik K Tomsovic and A Bose ldquoCommunicationmod-els for third party load frequency controlrdquo IEEE Transactions onPower Systems vol 19 no 1 pp 543ndash548 2004
[6] M Liu L Yang D Gan D Wang F Gao and Y Chen ldquoThestability of AGC systems with commensurate delaysrdquo EuropeanTransactions on Electrical Power vol 17 no 6 pp 615ndash627 2007
[7] H Wu K S Tsakalis and G T Heydt ldquoEvaluation of timedelay effects to wide area power system stabilizer designrdquo IEEETransactions on Power Systems vol 19 no 4 pp 1935ndash19412004
[8] X Yu and K Tomsovic ldquoApplication of linear matrix inequal-ities for load frequency control with communication delaysrdquoIEEETransactions on Power Systems vol 19 no 3 pp 1508ndash15152004
[9] L Jiang W Yao Q H Wu J Y Wen and S J Cheng ldquoDelay-dependent stability for load frequency control with constantand time-varying delaysrdquo IEEE Transactions on Power Systemsvol 27 no 2 pp 932ndash941 2012
[10] J Quanyuan Z Zhenyu and C Yijia ldquoWide-area TCSCcontroller design in consideration of feedback signalsrsquo timedelaysrdquo in Proceedings of the IEEE Power Engineering SocietyGeneralMeeting pp 1676ndash1680 San Francisco Calif USA June2005
[11] J Luque J I Escudero and F Perez ldquoAnalytic model of themeasurement errors caused by communications delayrdquo IEEETransactions on Power Delivery vol 17 no 2 pp 334ndash337 2002
[12] S P Carullo and C O Nwankpa ldquoExperimental validation ofa model for an information-embedded power systemrdquo IEEETransactions on Power Delivery vol 20 no 3 pp 1853ndash18632005
10 Mathematical Problems in Engineering
[13] C-W Park and W-H Kwon ldquoTime-delay compensation forinduction motor vector control systemrdquo Electric Power SystemsResearch vol 68 no 3 pp 238ndash247 2004
[14] H Okuno and T Fujii ldquoDelayed feedback controlled powersystemrdquo in Proceedings of the SICE Annual Conference pp2659ndash2663 August 2005
[15] H-K Chen T-N Lin and J-H Chen ldquoDynamic analysiscontrolling chaos and chaotification of a SMIB power systemrdquoChaos Solitons and Fractals vol 24 no 5 pp 1307ndash1315 2005
[16] H Jia X Yu Y Yu and C Wang ldquoPower system smallsignal stability region with time delayrdquo International Journal ofElectrical Power and Energy Systems vol 30 no 1 pp 16ndash222008
[17] S Ayasun ldquoComputation of time delay margin for power sys-tem small-signal stabilityrdquo European Transactions on ElectricalPower vol 19 no 7 pp 949ndash968 2009
[18] J Chen G Gu and C N Nett ldquoA new method for computingdelay margins for stability of linear delay systemsrdquo Systems andControl Letters vol 26 no 2 pp 107ndash117 1995
[19] K Gu V L Kharitonov and J Chen Stability of Time DelaySystems Birkhaauser Boston Mass USA 2003
[20] P Fu S-I Niculescu and J Chen ldquoStability of linear neutraltime-delay systems exact conditions via matrix pencil solu-tionsrdquo IEEE Transactions on Automatic Control vol 51 no 6pp 1063ndash1069 2006
[21] K Walton and J E Marshall ldquoDirect method for TDS stabilityanalysisrdquo IEE Proceedings D Control Theory and Applicationsvol 134 no 2 pp 101ndash107 1987
[22] J-H Su ldquoAsymptotic stability of linear autonomous systemswith commensurate time delaysrdquo IEEE Transactions on Auto-matic Control vol 40 no 6 pp 1114ndash1117 1995
[23] J Louisell ldquoAmatrixmethod for determining the imaginary axiseigenvalues of a delay systemrdquo IEEE Transactions on AutomaticControl vol 46 no 12 pp 2008ndash2012 2001
[24] Z V Rekasius ldquoA stability test for systems with delaysrdquo inProceedings of Joint Automatic Control Conference paper noTP9-A 1980
[25] N Olgac and R Sipahi ldquoAn exact method for the stabilityanalysis of time-delayed linear time-invariant (LTI) systemsrdquoIEEE Transactions on Automatic Control vol 47 no 5 pp 793ndash797 2002
[26] H Fazelinia R Sipahi and N Olgac ldquoStability robustness anal-ysis of multiple time-delayed systems using ldquobuilding blockrdquoconceptrdquo IEEE Transactions on Automatic Control vol 52 no5 pp 799ndash810 2007
[27] R Sipahi and N Olgac ldquoA comparative survey in determiningthe imaginary characteristic roots of LTI time delayed systemsrdquoin Proceedings of the 16th IFAC World Congress vol 16 p 635Prague Czech Republic July 2005
[28] MATLAB High-Performance Numeric Computation and Visu-alization Software The Mathworks Natick Mass USA 2001
[29] S Ayasun and A Gelen ldquoStability analysis of a generator exci-tation control system with time delaysrdquo Electrical Engineeringvol 91 no 6 pp 347ndash355 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
Table 1 Delay margins 120591lowast for different values of 119870119868and 119870
119875of the
AVR system with a stabilizing transformer
119870119868(sminus1) 120591
lowast (s)119870119875= 03 119870
119875= 05 119870
119875= 07
01 54172 44662 3810802 40532 39038 3651503 35181 35078 3423404 32443 32645 3240305 30813 31073 3105906 29745 29996 3007107 28997 29223 2933008 28446 28645 2876009 28026 28199 2831210 27694 27846 27952
as the integral gain increases when 119870119875is fixed In order to
find out the quantitative impact of the stabilizing transformeron the delay margin delay margins are also obtained for thecase in which a stabilizing transformer is not used in the AVRsystem [29] Table 2 shows delay margins of the AVR systemwithout a stabilizing transformer It is clear from Tables 1and 2 that compensation of the AVR system by a stabilizingtransformer significantly increases the delay margins for allvalues of PI controller gains which makes the AVR systemmore stable For example for 119870
119875= 07 and 119870
119868= 08 sminus1 the
delay margin when a stabilizing transformer is not includedis found to be 120591
lowast= 01554 s while it is 120591
lowast= 28760 s
when a stabilizing transformer is included This is obviouslya significant improvement in the stability performance of theAVR system This observation is valid for all values of PIcontroller gains as indicated in Tables 1 and 2
42 Verification of Theoretical Delay Margin Results Mat-labSimulink is used to verify the theoretical results on thedelaymargin and to illustrate how the stabilizing transformerdamps the oscillations in the presence of time delays For theillustrative purpose PI controller gains are chosen as 119870
119875=
07 and 119870119868= 08 sminus1 From Table 1 for these gains the delay
margin is found to be 120591lowast
= 28760 s when the stabilizingtransformer is included Simulation result for this delay valueis shown in Figure 4(a) It is clear that sustained oscillationsare observed indicating a marginally stable operation Whenthe time delay is less than the delay margin it is expected thatthe exciter systemwill be stable Figure 4(a) also shows such asimulation result for 120591 = 274 s Similarly when the time delayis larger than the delay margin the system will have growingoscillations indicating an unstable operation as illustratedin Figure 4(a) for 120591 = 30 s These simulation results showthat the theoretical method correctly estimates the delaymargin of the AVR system compensated by a stabilizingtransformer Moreover the voltage response of the AVRsystem not including a stabilizing transformer is presentedin Figure 4(b) indicating the same type of dynamic behavior
Table 2 Delay margins 120591lowast for different values of 119870119868and 119870
119875of the
AVR system without a stabilizing transformer
119870119868(sminus1) 120591
lowast (s)119870119875= 03 119870
119875= 05 119870
119875= 07
01 14164 06275 0365202 09700 05471 0334903 06781 04665 0303704 04831 03912 0272205 03459 03235 0241106 02447 02639 0211107 01674 02118 0182508 01066 01664 0155409 00576 01267 0130010 00174 00920 01063
as the AVR system including a stabilizing transformer with asmaller delay margin (120591lowast = 01554 s)
The damping effect of the stabilizing transformer couldbe easily illustrated by time-domain simulations Figure 5(a)compares the voltage response of the AVR system with andwithout a stabilizing transformer for 120591lowast = 01554 s It is clearthat theAVR systemnot including the stabilizing transformeris marginally stable or on the stability boundary havingsustained oscillations while the AVR system compensated bya stabilizing transformer has a response with quickly dampedoscillations Similarly Figure 5(b) shows the voltage responseof the AVR system with and without the stabilizing trans-former for 120591 = 017 s When the stabilizing transformer isnot considered the system is unstable since 120591 = 017 s gt 120591
lowast=
01554 s and growing oscillations are observed However theaddition of the stabilizing transformer damps the oscillationsand makes the excitation control system stable
5 Conclusions
This paper has proposed an exact method to compute thedelay margin for stability of the AVR system including astabilizing transformer The method first eliminates the tran-scendental term in the characteristic equation without usingany approximation The resulting augmented equation hasbecome a regular polynomial whose real roots coincide withthe imaginary roots of the characteristic equation exactlyAn expression in terms of system parameters and imaginaryroots of the characteristic equation has been derived forcomputing the delay margin Moreover using the augmentedequation a simple root sensitivity test has been developed todetermine the direction of the root transition
The effect of PI controller gains on the delay marginhas been investigated The theoretical results indicate thatthe delay margin decreases as the integral gain increasesfor a given proportional gain Such a decrease in delaymargin implies a less stable AVR system Moreover it hasbeen observed that the compensation of the AVR systemwith a stabilizing transformer remarkably increases the delay
8 Mathematical Problems in Engineering
0 20 40 60 80 100
0
05
1
15
2
25
3
Time (s)
minus1
minus05
120591 = 274
120591 = 3
120591 = 2876
Gen
erat
or te
rmin
al v
olta
geVt
(pu)
(a)
0 2 4 6 8 10 12 14 16 18 20
0
05
1
15
2
25
3
Time (s)
minus1
minus05
120591 = 01554
120591 = 0 14
120591 = 017
Gen
erat
or te
rmin
al v
olta
geVt
(pu)
(b)
Figure 4 Voltage response of the AVR system for 119870119875= 07 and 119870
119868= 08 sminus1 (a) with a stabilizing transformer and 120591 = 274 2876 and 30 s
and (b) without a stabilizing transformer and 120591 = 014 01554 and 017 s
0 2 4 6 8 10 12 14 16 18 20
0
05
1
15
2
25
Time (s)
Without a stabilizing transformerWith a stabilizing transformer
minus05
Gen
erat
or te
rmin
al v
olta
geVt
(pu)
(a)
0 2 4 6 8 10 12 14 16 18 20
0
05
1
15
2
25
3
Time (s)
minus1
minus05Gen
erat
or te
rmin
al v
olta
geVt
(pu)
Without a stabilizing transformerWith a stabilizing transformer
(b)
Figure 5 Voltage response of the AVR system with and without a stabilizing transformer for 119870119875= 07 and 119870
119868= 08 sminus1 (a) 120591 = 01554 s (b)
120591 = 017 s
margin of the system which indicates a more stable AVRsystem
Theoretical delay margin results have been verified bycarrying out simulation studies It has been observed thatthe proposed method correctly estimates the delay margin ofthe AVR system Additionally with the help of simulations ithas been shown that the stabilizing transformer significantlyimproves the system dynamic performance by damping theoscillations
With the help of the results presented controller gainscould be properly selected such that the excitation controlsystem will be stable and will have a desired dampingperformance even if certain amount of time delays exists inthe system
The following studies have been put in perspective asfuture work (i) the extension of the proposed methodinto multimachine power systems with commensurate timedelays (ii) the influence of power system stabilizer (PSS)
Mathematical Problems in Engineering 9
on the delay margin and (iii) the probabilistic evaluation ofdelay margin as to take into account random nature of timedelays
Appendix
The coefficients of polynomials 119875(119904) and 119876(119904) given in (5) interms of gains and time constants of the AVR system
1199016= 119879119860119879119864119879119865119879119866119879119877
1199015= 119879119860119879119864119879119865119879119866
+ 119879119877(119879119860119879119864119879119865+ 119879119860119879119864119879119866+ 119879119860119879119865119879119866+ 119879119864119879119865119879119866)
1199014= 119879119860119879119864119879119865+ 119879119860119879119864119879119866+ 119879119860119879119865119879119866+ 119879119864119879119865119879119866
+ 119879119877(119879119860119879119864+ 119879119860119879119865+ 119879119864119879119865+ 119879119860119879119866+ 119879119864119879119866
+119879119865119879119866+ 119870119860119870119864119870119875119870119865119879119866)
1199013= 119879119860119879119864+ 119879119860119879119865+ 119879119864119879119865+ 119879119860119879119866+ 119879119864119879119866
+ 119879119865119879119866+ 119870119860119870119864119870119875119870119865119879119866
+ 119879119877(119879119860+ 119879119864+ 119879119865+ 119870119860119870119864119870119875119870119865
+119870119860119870119864119870119868119870119865119879119866+ 119879119866)
1199012= 119879119860+ 119879119864+ 119879119865+ 119870119860119870119864119870119875119870119865+ 119870119860119870119864119870119868119870119865119879119866+ 119879119866
+ 119879119877(119870119860119870119864119870119868119870119865+ 1)
1199011= 1 + 119870
119860119870119864119870119868119870119865
1199022= 119870119860119870119864119870119875119870119866119870119877119879119865
1199021= 119870119860119870119864119870119866119870119877(119870119875+ 119870119868119879119865)
1199020= 119870119860119870119864119870119868119870119866119870119877
(A1)
The coefficients of the polynomial119882(1205962
119888) given in (10)
11990512
= 1199012
6 119905
10= 1199012
5minus 211990141199016
1199058= 1199012
4minus 211990131199015+ 211990121199016
1199056= 1199012
3minus 211990121199014+ 211990111199015
1199054= 1199012
2minus 211990111199013minus 1199022
2
1199052= 1199012
1minus 1199022
1+ 211990201199022 119905
0= minus1199022
0
(A2)
The coefficients of the analytical formula given in (12)
1198868= minus11990161199022 119886
7= 11990161199021minus 11990151199022
1198866= 11990141199022+ 11990161199020minus 11990151199021
1198865= minus11990141199021+ 11990131199022+ 11990151199020
1198864= minus11990121199022minus 11990141199020+ 11990131199021
1198863= 11990121199021minus 11990111199022minus 11990131199020
1198862= 11990121199020minus 11990111199021
1198861= 11990111199020 119886
0= 0
(A3)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] P Kundur Power System Stability and Control McGraw-HillNew York NY USA 1994
[2] IEEE Standard 4215 IEEE Recommended Practice for ExcitationSystem Models for Power System Stability Studies IEEE PowerEngineering Society 2005
[3] A G Phadke ldquoSynchronized phasor measurements in powersystemsrdquo IEEE Computer Applications in Power vol 6 no 2 pp10ndash15 1993
[4] B Naduvathuparambil M C Venti and A Feliachi ldquoCom-munication delays in wide area measurement systemsrdquo inProceedings of the 34th Southeastern Symposium on SystemTheory vol 1 pp 118ndash122 University of Alabama March 2002
[5] S Bhowmik K Tomsovic and A Bose ldquoCommunicationmod-els for third party load frequency controlrdquo IEEE Transactions onPower Systems vol 19 no 1 pp 543ndash548 2004
[6] M Liu L Yang D Gan D Wang F Gao and Y Chen ldquoThestability of AGC systems with commensurate delaysrdquo EuropeanTransactions on Electrical Power vol 17 no 6 pp 615ndash627 2007
[7] H Wu K S Tsakalis and G T Heydt ldquoEvaluation of timedelay effects to wide area power system stabilizer designrdquo IEEETransactions on Power Systems vol 19 no 4 pp 1935ndash19412004
[8] X Yu and K Tomsovic ldquoApplication of linear matrix inequal-ities for load frequency control with communication delaysrdquoIEEETransactions on Power Systems vol 19 no 3 pp 1508ndash15152004
[9] L Jiang W Yao Q H Wu J Y Wen and S J Cheng ldquoDelay-dependent stability for load frequency control with constantand time-varying delaysrdquo IEEE Transactions on Power Systemsvol 27 no 2 pp 932ndash941 2012
[10] J Quanyuan Z Zhenyu and C Yijia ldquoWide-area TCSCcontroller design in consideration of feedback signalsrsquo timedelaysrdquo in Proceedings of the IEEE Power Engineering SocietyGeneralMeeting pp 1676ndash1680 San Francisco Calif USA June2005
[11] J Luque J I Escudero and F Perez ldquoAnalytic model of themeasurement errors caused by communications delayrdquo IEEETransactions on Power Delivery vol 17 no 2 pp 334ndash337 2002
[12] S P Carullo and C O Nwankpa ldquoExperimental validation ofa model for an information-embedded power systemrdquo IEEETransactions on Power Delivery vol 20 no 3 pp 1853ndash18632005
10 Mathematical Problems in Engineering
[13] C-W Park and W-H Kwon ldquoTime-delay compensation forinduction motor vector control systemrdquo Electric Power SystemsResearch vol 68 no 3 pp 238ndash247 2004
[14] H Okuno and T Fujii ldquoDelayed feedback controlled powersystemrdquo in Proceedings of the SICE Annual Conference pp2659ndash2663 August 2005
[15] H-K Chen T-N Lin and J-H Chen ldquoDynamic analysiscontrolling chaos and chaotification of a SMIB power systemrdquoChaos Solitons and Fractals vol 24 no 5 pp 1307ndash1315 2005
[16] H Jia X Yu Y Yu and C Wang ldquoPower system smallsignal stability region with time delayrdquo International Journal ofElectrical Power and Energy Systems vol 30 no 1 pp 16ndash222008
[17] S Ayasun ldquoComputation of time delay margin for power sys-tem small-signal stabilityrdquo European Transactions on ElectricalPower vol 19 no 7 pp 949ndash968 2009
[18] J Chen G Gu and C N Nett ldquoA new method for computingdelay margins for stability of linear delay systemsrdquo Systems andControl Letters vol 26 no 2 pp 107ndash117 1995
[19] K Gu V L Kharitonov and J Chen Stability of Time DelaySystems Birkhaauser Boston Mass USA 2003
[20] P Fu S-I Niculescu and J Chen ldquoStability of linear neutraltime-delay systems exact conditions via matrix pencil solu-tionsrdquo IEEE Transactions on Automatic Control vol 51 no 6pp 1063ndash1069 2006
[21] K Walton and J E Marshall ldquoDirect method for TDS stabilityanalysisrdquo IEE Proceedings D Control Theory and Applicationsvol 134 no 2 pp 101ndash107 1987
[22] J-H Su ldquoAsymptotic stability of linear autonomous systemswith commensurate time delaysrdquo IEEE Transactions on Auto-matic Control vol 40 no 6 pp 1114ndash1117 1995
[23] J Louisell ldquoAmatrixmethod for determining the imaginary axiseigenvalues of a delay systemrdquo IEEE Transactions on AutomaticControl vol 46 no 12 pp 2008ndash2012 2001
[24] Z V Rekasius ldquoA stability test for systems with delaysrdquo inProceedings of Joint Automatic Control Conference paper noTP9-A 1980
[25] N Olgac and R Sipahi ldquoAn exact method for the stabilityanalysis of time-delayed linear time-invariant (LTI) systemsrdquoIEEE Transactions on Automatic Control vol 47 no 5 pp 793ndash797 2002
[26] H Fazelinia R Sipahi and N Olgac ldquoStability robustness anal-ysis of multiple time-delayed systems using ldquobuilding blockrdquoconceptrdquo IEEE Transactions on Automatic Control vol 52 no5 pp 799ndash810 2007
[27] R Sipahi and N Olgac ldquoA comparative survey in determiningthe imaginary characteristic roots of LTI time delayed systemsrdquoin Proceedings of the 16th IFAC World Congress vol 16 p 635Prague Czech Republic July 2005
[28] MATLAB High-Performance Numeric Computation and Visu-alization Software The Mathworks Natick Mass USA 2001
[29] S Ayasun and A Gelen ldquoStability analysis of a generator exci-tation control system with time delaysrdquo Electrical Engineeringvol 91 no 6 pp 347ndash355 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
0 20 40 60 80 100
0
05
1
15
2
25
3
Time (s)
minus1
minus05
120591 = 274
120591 = 3
120591 = 2876
Gen
erat
or te
rmin
al v
olta
geVt
(pu)
(a)
0 2 4 6 8 10 12 14 16 18 20
0
05
1
15
2
25
3
Time (s)
minus1
minus05
120591 = 01554
120591 = 0 14
120591 = 017
Gen
erat
or te
rmin
al v
olta
geVt
(pu)
(b)
Figure 4 Voltage response of the AVR system for 119870119875= 07 and 119870
119868= 08 sminus1 (a) with a stabilizing transformer and 120591 = 274 2876 and 30 s
and (b) without a stabilizing transformer and 120591 = 014 01554 and 017 s
0 2 4 6 8 10 12 14 16 18 20
0
05
1
15
2
25
Time (s)
Without a stabilizing transformerWith a stabilizing transformer
minus05
Gen
erat
or te
rmin
al v
olta
geVt
(pu)
(a)
0 2 4 6 8 10 12 14 16 18 20
0
05
1
15
2
25
3
Time (s)
minus1
minus05Gen
erat
or te
rmin
al v
olta
geVt
(pu)
Without a stabilizing transformerWith a stabilizing transformer
(b)
Figure 5 Voltage response of the AVR system with and without a stabilizing transformer for 119870119875= 07 and 119870
119868= 08 sminus1 (a) 120591 = 01554 s (b)
120591 = 017 s
margin of the system which indicates a more stable AVRsystem
Theoretical delay margin results have been verified bycarrying out simulation studies It has been observed thatthe proposed method correctly estimates the delay margin ofthe AVR system Additionally with the help of simulations ithas been shown that the stabilizing transformer significantlyimproves the system dynamic performance by damping theoscillations
With the help of the results presented controller gainscould be properly selected such that the excitation controlsystem will be stable and will have a desired dampingperformance even if certain amount of time delays exists inthe system
The following studies have been put in perspective asfuture work (i) the extension of the proposed methodinto multimachine power systems with commensurate timedelays (ii) the influence of power system stabilizer (PSS)
Mathematical Problems in Engineering 9
on the delay margin and (iii) the probabilistic evaluation ofdelay margin as to take into account random nature of timedelays
Appendix
The coefficients of polynomials 119875(119904) and 119876(119904) given in (5) interms of gains and time constants of the AVR system
1199016= 119879119860119879119864119879119865119879119866119879119877
1199015= 119879119860119879119864119879119865119879119866
+ 119879119877(119879119860119879119864119879119865+ 119879119860119879119864119879119866+ 119879119860119879119865119879119866+ 119879119864119879119865119879119866)
1199014= 119879119860119879119864119879119865+ 119879119860119879119864119879119866+ 119879119860119879119865119879119866+ 119879119864119879119865119879119866
+ 119879119877(119879119860119879119864+ 119879119860119879119865+ 119879119864119879119865+ 119879119860119879119866+ 119879119864119879119866
+119879119865119879119866+ 119870119860119870119864119870119875119870119865119879119866)
1199013= 119879119860119879119864+ 119879119860119879119865+ 119879119864119879119865+ 119879119860119879119866+ 119879119864119879119866
+ 119879119865119879119866+ 119870119860119870119864119870119875119870119865119879119866
+ 119879119877(119879119860+ 119879119864+ 119879119865+ 119870119860119870119864119870119875119870119865
+119870119860119870119864119870119868119870119865119879119866+ 119879119866)
1199012= 119879119860+ 119879119864+ 119879119865+ 119870119860119870119864119870119875119870119865+ 119870119860119870119864119870119868119870119865119879119866+ 119879119866
+ 119879119877(119870119860119870119864119870119868119870119865+ 1)
1199011= 1 + 119870
119860119870119864119870119868119870119865
1199022= 119870119860119870119864119870119875119870119866119870119877119879119865
1199021= 119870119860119870119864119870119866119870119877(119870119875+ 119870119868119879119865)
1199020= 119870119860119870119864119870119868119870119866119870119877
(A1)
The coefficients of the polynomial119882(1205962
119888) given in (10)
11990512
= 1199012
6 119905
10= 1199012
5minus 211990141199016
1199058= 1199012
4minus 211990131199015+ 211990121199016
1199056= 1199012
3minus 211990121199014+ 211990111199015
1199054= 1199012
2minus 211990111199013minus 1199022
2
1199052= 1199012
1minus 1199022
1+ 211990201199022 119905
0= minus1199022
0
(A2)
The coefficients of the analytical formula given in (12)
1198868= minus11990161199022 119886
7= 11990161199021minus 11990151199022
1198866= 11990141199022+ 11990161199020minus 11990151199021
1198865= minus11990141199021+ 11990131199022+ 11990151199020
1198864= minus11990121199022minus 11990141199020+ 11990131199021
1198863= 11990121199021minus 11990111199022minus 11990131199020
1198862= 11990121199020minus 11990111199021
1198861= 11990111199020 119886
0= 0
(A3)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] P Kundur Power System Stability and Control McGraw-HillNew York NY USA 1994
[2] IEEE Standard 4215 IEEE Recommended Practice for ExcitationSystem Models for Power System Stability Studies IEEE PowerEngineering Society 2005
[3] A G Phadke ldquoSynchronized phasor measurements in powersystemsrdquo IEEE Computer Applications in Power vol 6 no 2 pp10ndash15 1993
[4] B Naduvathuparambil M C Venti and A Feliachi ldquoCom-munication delays in wide area measurement systemsrdquo inProceedings of the 34th Southeastern Symposium on SystemTheory vol 1 pp 118ndash122 University of Alabama March 2002
[5] S Bhowmik K Tomsovic and A Bose ldquoCommunicationmod-els for third party load frequency controlrdquo IEEE Transactions onPower Systems vol 19 no 1 pp 543ndash548 2004
[6] M Liu L Yang D Gan D Wang F Gao and Y Chen ldquoThestability of AGC systems with commensurate delaysrdquo EuropeanTransactions on Electrical Power vol 17 no 6 pp 615ndash627 2007
[7] H Wu K S Tsakalis and G T Heydt ldquoEvaluation of timedelay effects to wide area power system stabilizer designrdquo IEEETransactions on Power Systems vol 19 no 4 pp 1935ndash19412004
[8] X Yu and K Tomsovic ldquoApplication of linear matrix inequal-ities for load frequency control with communication delaysrdquoIEEETransactions on Power Systems vol 19 no 3 pp 1508ndash15152004
[9] L Jiang W Yao Q H Wu J Y Wen and S J Cheng ldquoDelay-dependent stability for load frequency control with constantand time-varying delaysrdquo IEEE Transactions on Power Systemsvol 27 no 2 pp 932ndash941 2012
[10] J Quanyuan Z Zhenyu and C Yijia ldquoWide-area TCSCcontroller design in consideration of feedback signalsrsquo timedelaysrdquo in Proceedings of the IEEE Power Engineering SocietyGeneralMeeting pp 1676ndash1680 San Francisco Calif USA June2005
[11] J Luque J I Escudero and F Perez ldquoAnalytic model of themeasurement errors caused by communications delayrdquo IEEETransactions on Power Delivery vol 17 no 2 pp 334ndash337 2002
[12] S P Carullo and C O Nwankpa ldquoExperimental validation ofa model for an information-embedded power systemrdquo IEEETransactions on Power Delivery vol 20 no 3 pp 1853ndash18632005
10 Mathematical Problems in Engineering
[13] C-W Park and W-H Kwon ldquoTime-delay compensation forinduction motor vector control systemrdquo Electric Power SystemsResearch vol 68 no 3 pp 238ndash247 2004
[14] H Okuno and T Fujii ldquoDelayed feedback controlled powersystemrdquo in Proceedings of the SICE Annual Conference pp2659ndash2663 August 2005
[15] H-K Chen T-N Lin and J-H Chen ldquoDynamic analysiscontrolling chaos and chaotification of a SMIB power systemrdquoChaos Solitons and Fractals vol 24 no 5 pp 1307ndash1315 2005
[16] H Jia X Yu Y Yu and C Wang ldquoPower system smallsignal stability region with time delayrdquo International Journal ofElectrical Power and Energy Systems vol 30 no 1 pp 16ndash222008
[17] S Ayasun ldquoComputation of time delay margin for power sys-tem small-signal stabilityrdquo European Transactions on ElectricalPower vol 19 no 7 pp 949ndash968 2009
[18] J Chen G Gu and C N Nett ldquoA new method for computingdelay margins for stability of linear delay systemsrdquo Systems andControl Letters vol 26 no 2 pp 107ndash117 1995
[19] K Gu V L Kharitonov and J Chen Stability of Time DelaySystems Birkhaauser Boston Mass USA 2003
[20] P Fu S-I Niculescu and J Chen ldquoStability of linear neutraltime-delay systems exact conditions via matrix pencil solu-tionsrdquo IEEE Transactions on Automatic Control vol 51 no 6pp 1063ndash1069 2006
[21] K Walton and J E Marshall ldquoDirect method for TDS stabilityanalysisrdquo IEE Proceedings D Control Theory and Applicationsvol 134 no 2 pp 101ndash107 1987
[22] J-H Su ldquoAsymptotic stability of linear autonomous systemswith commensurate time delaysrdquo IEEE Transactions on Auto-matic Control vol 40 no 6 pp 1114ndash1117 1995
[23] J Louisell ldquoAmatrixmethod for determining the imaginary axiseigenvalues of a delay systemrdquo IEEE Transactions on AutomaticControl vol 46 no 12 pp 2008ndash2012 2001
[24] Z V Rekasius ldquoA stability test for systems with delaysrdquo inProceedings of Joint Automatic Control Conference paper noTP9-A 1980
[25] N Olgac and R Sipahi ldquoAn exact method for the stabilityanalysis of time-delayed linear time-invariant (LTI) systemsrdquoIEEE Transactions on Automatic Control vol 47 no 5 pp 793ndash797 2002
[26] H Fazelinia R Sipahi and N Olgac ldquoStability robustness anal-ysis of multiple time-delayed systems using ldquobuilding blockrdquoconceptrdquo IEEE Transactions on Automatic Control vol 52 no5 pp 799ndash810 2007
[27] R Sipahi and N Olgac ldquoA comparative survey in determiningthe imaginary characteristic roots of LTI time delayed systemsrdquoin Proceedings of the 16th IFAC World Congress vol 16 p 635Prague Czech Republic July 2005
[28] MATLAB High-Performance Numeric Computation and Visu-alization Software The Mathworks Natick Mass USA 2001
[29] S Ayasun and A Gelen ldquoStability analysis of a generator exci-tation control system with time delaysrdquo Electrical Engineeringvol 91 no 6 pp 347ndash355 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 9
on the delay margin and (iii) the probabilistic evaluation ofdelay margin as to take into account random nature of timedelays
Appendix
The coefficients of polynomials 119875(119904) and 119876(119904) given in (5) interms of gains and time constants of the AVR system
1199016= 119879119860119879119864119879119865119879119866119879119877
1199015= 119879119860119879119864119879119865119879119866
+ 119879119877(119879119860119879119864119879119865+ 119879119860119879119864119879119866+ 119879119860119879119865119879119866+ 119879119864119879119865119879119866)
1199014= 119879119860119879119864119879119865+ 119879119860119879119864119879119866+ 119879119860119879119865119879119866+ 119879119864119879119865119879119866
+ 119879119877(119879119860119879119864+ 119879119860119879119865+ 119879119864119879119865+ 119879119860119879119866+ 119879119864119879119866
+119879119865119879119866+ 119870119860119870119864119870119875119870119865119879119866)
1199013= 119879119860119879119864+ 119879119860119879119865+ 119879119864119879119865+ 119879119860119879119866+ 119879119864119879119866
+ 119879119865119879119866+ 119870119860119870119864119870119875119870119865119879119866
+ 119879119877(119879119860+ 119879119864+ 119879119865+ 119870119860119870119864119870119875119870119865
+119870119860119870119864119870119868119870119865119879119866+ 119879119866)
1199012= 119879119860+ 119879119864+ 119879119865+ 119870119860119870119864119870119875119870119865+ 119870119860119870119864119870119868119870119865119879119866+ 119879119866
+ 119879119877(119870119860119870119864119870119868119870119865+ 1)
1199011= 1 + 119870
119860119870119864119870119868119870119865
1199022= 119870119860119870119864119870119875119870119866119870119877119879119865
1199021= 119870119860119870119864119870119866119870119877(119870119875+ 119870119868119879119865)
1199020= 119870119860119870119864119870119868119870119866119870119877
(A1)
The coefficients of the polynomial119882(1205962
119888) given in (10)
11990512
= 1199012
6 119905
10= 1199012
5minus 211990141199016
1199058= 1199012
4minus 211990131199015+ 211990121199016
1199056= 1199012
3minus 211990121199014+ 211990111199015
1199054= 1199012
2minus 211990111199013minus 1199022
2
1199052= 1199012
1minus 1199022
1+ 211990201199022 119905
0= minus1199022
0
(A2)
The coefficients of the analytical formula given in (12)
1198868= minus11990161199022 119886
7= 11990161199021minus 11990151199022
1198866= 11990141199022+ 11990161199020minus 11990151199021
1198865= minus11990141199021+ 11990131199022+ 11990151199020
1198864= minus11990121199022minus 11990141199020+ 11990131199021
1198863= 11990121199021minus 11990111199022minus 11990131199020
1198862= 11990121199020minus 11990111199021
1198861= 11990111199020 119886
0= 0
(A3)
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] P Kundur Power System Stability and Control McGraw-HillNew York NY USA 1994
[2] IEEE Standard 4215 IEEE Recommended Practice for ExcitationSystem Models for Power System Stability Studies IEEE PowerEngineering Society 2005
[3] A G Phadke ldquoSynchronized phasor measurements in powersystemsrdquo IEEE Computer Applications in Power vol 6 no 2 pp10ndash15 1993
[4] B Naduvathuparambil M C Venti and A Feliachi ldquoCom-munication delays in wide area measurement systemsrdquo inProceedings of the 34th Southeastern Symposium on SystemTheory vol 1 pp 118ndash122 University of Alabama March 2002
[5] S Bhowmik K Tomsovic and A Bose ldquoCommunicationmod-els for third party load frequency controlrdquo IEEE Transactions onPower Systems vol 19 no 1 pp 543ndash548 2004
[6] M Liu L Yang D Gan D Wang F Gao and Y Chen ldquoThestability of AGC systems with commensurate delaysrdquo EuropeanTransactions on Electrical Power vol 17 no 6 pp 615ndash627 2007
[7] H Wu K S Tsakalis and G T Heydt ldquoEvaluation of timedelay effects to wide area power system stabilizer designrdquo IEEETransactions on Power Systems vol 19 no 4 pp 1935ndash19412004
[8] X Yu and K Tomsovic ldquoApplication of linear matrix inequal-ities for load frequency control with communication delaysrdquoIEEETransactions on Power Systems vol 19 no 3 pp 1508ndash15152004
[9] L Jiang W Yao Q H Wu J Y Wen and S J Cheng ldquoDelay-dependent stability for load frequency control with constantand time-varying delaysrdquo IEEE Transactions on Power Systemsvol 27 no 2 pp 932ndash941 2012
[10] J Quanyuan Z Zhenyu and C Yijia ldquoWide-area TCSCcontroller design in consideration of feedback signalsrsquo timedelaysrdquo in Proceedings of the IEEE Power Engineering SocietyGeneralMeeting pp 1676ndash1680 San Francisco Calif USA June2005
[11] J Luque J I Escudero and F Perez ldquoAnalytic model of themeasurement errors caused by communications delayrdquo IEEETransactions on Power Delivery vol 17 no 2 pp 334ndash337 2002
[12] S P Carullo and C O Nwankpa ldquoExperimental validation ofa model for an information-embedded power systemrdquo IEEETransactions on Power Delivery vol 20 no 3 pp 1853ndash18632005
10 Mathematical Problems in Engineering
[13] C-W Park and W-H Kwon ldquoTime-delay compensation forinduction motor vector control systemrdquo Electric Power SystemsResearch vol 68 no 3 pp 238ndash247 2004
[14] H Okuno and T Fujii ldquoDelayed feedback controlled powersystemrdquo in Proceedings of the SICE Annual Conference pp2659ndash2663 August 2005
[15] H-K Chen T-N Lin and J-H Chen ldquoDynamic analysiscontrolling chaos and chaotification of a SMIB power systemrdquoChaos Solitons and Fractals vol 24 no 5 pp 1307ndash1315 2005
[16] H Jia X Yu Y Yu and C Wang ldquoPower system smallsignal stability region with time delayrdquo International Journal ofElectrical Power and Energy Systems vol 30 no 1 pp 16ndash222008
[17] S Ayasun ldquoComputation of time delay margin for power sys-tem small-signal stabilityrdquo European Transactions on ElectricalPower vol 19 no 7 pp 949ndash968 2009
[18] J Chen G Gu and C N Nett ldquoA new method for computingdelay margins for stability of linear delay systemsrdquo Systems andControl Letters vol 26 no 2 pp 107ndash117 1995
[19] K Gu V L Kharitonov and J Chen Stability of Time DelaySystems Birkhaauser Boston Mass USA 2003
[20] P Fu S-I Niculescu and J Chen ldquoStability of linear neutraltime-delay systems exact conditions via matrix pencil solu-tionsrdquo IEEE Transactions on Automatic Control vol 51 no 6pp 1063ndash1069 2006
[21] K Walton and J E Marshall ldquoDirect method for TDS stabilityanalysisrdquo IEE Proceedings D Control Theory and Applicationsvol 134 no 2 pp 101ndash107 1987
[22] J-H Su ldquoAsymptotic stability of linear autonomous systemswith commensurate time delaysrdquo IEEE Transactions on Auto-matic Control vol 40 no 6 pp 1114ndash1117 1995
[23] J Louisell ldquoAmatrixmethod for determining the imaginary axiseigenvalues of a delay systemrdquo IEEE Transactions on AutomaticControl vol 46 no 12 pp 2008ndash2012 2001
[24] Z V Rekasius ldquoA stability test for systems with delaysrdquo inProceedings of Joint Automatic Control Conference paper noTP9-A 1980
[25] N Olgac and R Sipahi ldquoAn exact method for the stabilityanalysis of time-delayed linear time-invariant (LTI) systemsrdquoIEEE Transactions on Automatic Control vol 47 no 5 pp 793ndash797 2002
[26] H Fazelinia R Sipahi and N Olgac ldquoStability robustness anal-ysis of multiple time-delayed systems using ldquobuilding blockrdquoconceptrdquo IEEE Transactions on Automatic Control vol 52 no5 pp 799ndash810 2007
[27] R Sipahi and N Olgac ldquoA comparative survey in determiningthe imaginary characteristic roots of LTI time delayed systemsrdquoin Proceedings of the 16th IFAC World Congress vol 16 p 635Prague Czech Republic July 2005
[28] MATLAB High-Performance Numeric Computation and Visu-alization Software The Mathworks Natick Mass USA 2001
[29] S Ayasun and A Gelen ldquoStability analysis of a generator exci-tation control system with time delaysrdquo Electrical Engineeringvol 91 no 6 pp 347ndash355 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

10 Mathematical Problems in Engineering
[13] C-W Park and W-H Kwon ldquoTime-delay compensation forinduction motor vector control systemrdquo Electric Power SystemsResearch vol 68 no 3 pp 238ndash247 2004
[14] H Okuno and T Fujii ldquoDelayed feedback controlled powersystemrdquo in Proceedings of the SICE Annual Conference pp2659ndash2663 August 2005
[15] H-K Chen T-N Lin and J-H Chen ldquoDynamic analysiscontrolling chaos and chaotification of a SMIB power systemrdquoChaos Solitons and Fractals vol 24 no 5 pp 1307ndash1315 2005
[16] H Jia X Yu Y Yu and C Wang ldquoPower system smallsignal stability region with time delayrdquo International Journal ofElectrical Power and Energy Systems vol 30 no 1 pp 16ndash222008
[17] S Ayasun ldquoComputation of time delay margin for power sys-tem small-signal stabilityrdquo European Transactions on ElectricalPower vol 19 no 7 pp 949ndash968 2009
[18] J Chen G Gu and C N Nett ldquoA new method for computingdelay margins for stability of linear delay systemsrdquo Systems andControl Letters vol 26 no 2 pp 107ndash117 1995
[19] K Gu V L Kharitonov and J Chen Stability of Time DelaySystems Birkhaauser Boston Mass USA 2003
[20] P Fu S-I Niculescu and J Chen ldquoStability of linear neutraltime-delay systems exact conditions via matrix pencil solu-tionsrdquo IEEE Transactions on Automatic Control vol 51 no 6pp 1063ndash1069 2006
[21] K Walton and J E Marshall ldquoDirect method for TDS stabilityanalysisrdquo IEE Proceedings D Control Theory and Applicationsvol 134 no 2 pp 101ndash107 1987
[22] J-H Su ldquoAsymptotic stability of linear autonomous systemswith commensurate time delaysrdquo IEEE Transactions on Auto-matic Control vol 40 no 6 pp 1114ndash1117 1995
[23] J Louisell ldquoAmatrixmethod for determining the imaginary axiseigenvalues of a delay systemrdquo IEEE Transactions on AutomaticControl vol 46 no 12 pp 2008ndash2012 2001
[24] Z V Rekasius ldquoA stability test for systems with delaysrdquo inProceedings of Joint Automatic Control Conference paper noTP9-A 1980
[25] N Olgac and R Sipahi ldquoAn exact method for the stabilityanalysis of time-delayed linear time-invariant (LTI) systemsrdquoIEEE Transactions on Automatic Control vol 47 no 5 pp 793ndash797 2002
[26] H Fazelinia R Sipahi and N Olgac ldquoStability robustness anal-ysis of multiple time-delayed systems using ldquobuilding blockrdquoconceptrdquo IEEE Transactions on Automatic Control vol 52 no5 pp 799ndash810 2007
[27] R Sipahi and N Olgac ldquoA comparative survey in determiningthe imaginary characteristic roots of LTI time delayed systemsrdquoin Proceedings of the 16th IFAC World Congress vol 16 p 635Prague Czech Republic July 2005
[28] MATLAB High-Performance Numeric Computation and Visu-alization Software The Mathworks Natick Mass USA 2001
[29] S Ayasun and A Gelen ldquoStability analysis of a generator exci-tation control system with time delaysrdquo Electrical Engineeringvol 91 no 6 pp 347ndash355 2010
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of