Embed Size (px)
Citation preview

Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2013 Article ID 149046 12 pageshttpdxdoiorg1011552013149046
Research ArticleNonlinear Dynamic Analysis and Optimization of Closed-FormPlanetary Gear System
Qilin Huang12 Yong Wang12 Zhipu Huo12 and Yudong Xie12
1 School of Mechanical Engineering Shandong University Jingshi Road 17923 Jinan Shandong 25006 China2 Key Laboratory of High-Efficiency and Clean Mechanical Manufacture Shandong University Ministry of Education JinanShandong 250061 China
Correspondence should be addressed to Yong Wang meywangsdueducn
Received 3 February 2013 Accepted 10 May 2013
Academic Editor Zhuming Bi
Copyright copy 2013 Qilin Huang et al This is an open access article distributed under the Creative Commons Attribution Licensewhich permits unrestricted use distribution and reproduction in any medium provided the original work is properly cited
A nonlinear purely rotational dynamic model of a multistage closed-form planetary gear set formed by two simple planetary stagesis proposed in this study The model includes time-varying mesh stiffness excitation fluctuation and gear backlash nonlinearitiesThe nonlinear differential equations of motion are solved numerically using variable step-size Runge-Kutta In order to obtainfunction expression of optimization objective the nonlinear differential equations of motion are solved analytically using harmonicbalance method (HBM) Based on the analytical solution of dynamic equations the optimization mathematical model which aimsat minimizing the vibration displacement of the low-speed carrier and the total mass of the gear transmission system is establishedThe optimization toolbox in MATLAB program is adopted to obtain the optimal solution A case is studied to demonstrate theeffectiveness of the dynamic model and the optimization methodThe results show that the dynamic properties of the closed-formplanetary gear transmission system have been improved and the total mass of the gear set has been decreased significantly
1 Introduction
Planetary gear sets have been widely used in engineeringincluding automotive transmissions aviation transmissionsand crane gearboxes as well as other marine and industrialpower transmission systems Planetary gear trains havemanyadvantages over fixed-center counter-shaft gear systemsThe flow of power via multiple-gear meshes increases thepower density and helps to reduce the overall size of thetransmission train The ability of multistage planetary setsin providing multiple speed reduction ratios has been themain reason for their extensive use in automatic transmissionapplications Closed-form planetary trains are obtained froma number of single-stage differential planetary gear setsand one quasi-planetary stage whose central members areconnected according to a given power flow configurationInput output and fixed member assignments are made tocertain central members to achieve a given gear ratio
Because of complexity of structure most of the ear-lier published studies on the planetary gear systems were
confined to single-stage planetary In addition these earlymodels were of linear time-invariant type so that the eigensolutions andmodel summation techniques were used to pre-dict the natural modes and the forced response [1ndash3] Kahra-man [4] employed a purely rotational dynamic model for allpossible power flow configurations of complex compoundplanetary gear sets He classified the naturalmodel in two cat-egories asymmetric planet modes and axi-symmetric overallmodes Sun and Hu [5] investigated the frequency responseof nonlinear planetary transmission system with multipleclearances using single-term harmonic balance method andfocusing only on a single power flow configuration inwhich the ring gear was fixed Al-shyyab and Kahraman[6] developed a rotational single-stage nonlinear dynamicmodel of a simple planetary gear set and provided a semi-analytical forced response solution using multiterm HBMand showed that these HBM solutions in well agreement withdirect numerical integration solution Also a recent studyby Al-shyyab [7] investigated a compound planetary gear setformed by any number of simple planetary stages and each
2 Mathematical Problems in Engineering
r2
r1
C1
S2S1
Tin Tout
phpL
Differentialplanetary
Quasi-planetary
(a)
Tin Tout
Kr1r2
Kr2n
Kr1n
Kc2
Ks2n
Ks1n
Ks1Kr
Kc1s2
(b)
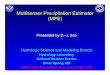
Figure 1 (a) A closed-form planetary gear system (b) A discrete model of closed-form planetary gear system
planetary stage has a distinct fundamental mesh frequencyand any number of planets spaced in any angular positionsusing multiterm HBM
Those studies cited previously are mainly aimed at themodeling of planetary gear trains the analysis of dynamicresponse as well as the analysis of parameters stability andso on Whereas the studies on nonlinear dynamic optimi-zation design of planetary transmission system with multipleclearances are still very limited Zeng Bao [8] and GuanWei [9] investigated multistage helical gear trains and single-stage planetary gear train taking the dynamic propertiesas objective functions respectively But in their studiesthe design variables of optimization were limited to theseparameters the number of gears the pitch-cycle helical-angle and the modification coefficients This study aims atproviding numerical solutions and analytical solutions for thedynamic response of a closed-form planetary gear train hav-ing three planets spaced equally position angle using Runge-Kutta numerical integration and HBM respectively Basedon the analytical solution the optimization mathematicalmodel that focused on minimizing the vibration accelerationof structure and the total mass of the gear transmissionsystem is established Some key design parameters such as thenumber of each gear the module of each stage planetary thetransmission ratio of each stage planetary and the pressureangle are chosen as design varies This study is available forthe designing of closed-form planetary gear sets of bothmin-imum weight and best dynamic characteristic for reference
2 Dynamic Model of System
21 Model and Assumptions The closed-form planetary geartrain consists of a single-stage differential planetary (low-speed stage) and a single-stage quasi-planetary (high-speedstage carrier is fixed) in this study as shown in Figure 1 Eachstage is comprised of three central elements the sun gear(1199041 1199042) the ring gear (119903
1 1199032) and carrier (119888
1 1198882) Each stage
Crp
Crp
Crp
Csp
Csp
Csp
Krp
Krp
Krp
Ksp
KspKsp
Uc
Us
Up3
Up2
Up1
Tin
Figure 2 Lumped parameter dynamic model of single-stage plane-tary gear set
planetary has 119899planet gearsTheparameter 119899 representing thenumber of planet gears is taken as 3 throughout this paperThe planets of each stage are free to rotate with respect totheir common carrier All the gears aremounted on their rigidshafts supported by rolling element bearings The two ringsare connected by torsional linear springs of stiffness 119896
11990311199032
as shown in Figure 2 Likewise the other central elements1198881 1198882and 1199041 1199042are constrained by torsional linear springs
of stiffness 11989611988811199042
1198961198882
and 1198961199041 11989611988811199042
respectively In order toestablish themathematical model of the transmission systema number of simplified assumptions are introduced in the caseof speed reduction in the closed-form planetary gear set asshown in Figure 1
Mathematical Problems in Engineering 3
(1) All of the gears in the set are assumed to be rigid andthe flexibilities of each gear teeth at the gear meshinterface are modeled by an equivalent spring havingtime-varying stiffness acting along the mesh direc-tions These periodically time-varying mesh stiff-nesses are subject to piece-linear functions represent-ing gear backlashes
(2) Because the bending stiffness of shafts in the set isvery large the deflection of these shafts can be ne-glected Thus the transverse displacements of gearsare not considered
(3) Because the damping mechanisms at the gear meshesand bearings of a planetary gear set are not easy to givea description of mathematical model viscous gearmesh damping elements are introduced to representenergy dissipation of the transmission system
22 Equivalent Displacements In order to establish the equa-tions of motion easily all of torsional angular displacementsare unified on the pressure line in terms of equivalentdisplacements The equivalent transverse displacements inthe mesh line direction caused by rotational displacementsare written as follows
119906119888119895= 119903119888119895120579119888119895 119906119903119895= 119903119903119895120579119903119895 119906119904119895= 119903119904119895120579119904119895 119906119901119895119899= 119903119901119895120579119895119899
119895 = 1 2 119899 = 1 2 3
(1)
where 120579 and 119903 (subscripts 119888119895 119903119895 119904119895 119895119899 119895 = ℎ 119897 119899 = 1 2 3)are angular displacements and base circle radius of the partsrespectively While 119903 (subscripts 1198881 1198882) is the equivalent basecircle radius of the carriers defined as follows
1199031199041+ 119903119901ℎ= 1199031199031minus 119903119901ℎ= 1199031198881cos120572
1199031199042+ 119903119901119897= 1199031199032minus 119903119901119897= 1199031198882cos120572
(2)
With the symbol 119880 is used to represent the relativedisplacements in the direction of pressure line the relativedisplacements are obtained according to themeshing relationand the equivalent displacements as follows The positivedirection of the relative displacements is assumed to be thesame direction of the compressive deformation The relativedisplacements of the parts in the pressure line direction arewritten as follows
1198801199041119901ℎ119894
= 1199031199041(1205791199041minus 1205791198881) minus 119903119901ℎ(120579ℎ119894+ 1205791198881)
= 11990311990411205791199041minus 11990311988811205791198881cos120572 minus 119903
119901ℎ120579ℎ119894
(3a)
1198801199031119901ℎ119894
= 119903119901ℎ(120579ℎ119894+ 1205791198881) minus 1199031199031(1205791199031+ 1205791198881)
= 119903119901ℎ120579ℎ119894minus 11990311988811205791198881cos120572 minus 119903
11990311205791199031
(3b)
11988011988811199042= 1199031198881(1205791198881minus 1205791199042) cos120572 (3c)
1198801198882= 11990311988821205791198882cos120572 (3d)
1198801199042119901119897119894
= 1199031199042(1205791199042minus 1205791198882) minus 119903119901119897(120579119897119894+ 1205791198882)
= 11990311990421205791199042minus 11990311988821205791198882cos120572 minus 119903
119901119897120579119897119894
(3e)
1198801199032119901119897119894
= 119903119901119897(120579119897119894+ 1205791198882) minus 1199031199032(1205791199032+ 1205791198882)
= 119903119901119897120579119897119894minus 11990311988821205791198882cos120572 minus 119903
11990321205791199032
(3f)
11988011990311199032
= 1199031199031(1205791199031minus 1205791199032) (3g)
23 Equations of Motion The closed-form planetary gearsystem consists of four different kinds of gear pairs theexternal gear pair that is the sun gearplanet gear-119894 pair(subscripts 1199041 119901ℎ119894 and 1199042 119901119897119894) and the internal gear pairthat is the ring gearplanet gear-119894 pair (subscripts 1199031 119901ℎ119894and 1199032 119901119897119894) The mesh of gear 119895 (119904119894 or 119903119894 119894 = 1 2) with aplanet 119901119894 (119894 = ℎ 119897) is represented by a periodically time-varying stiffness element 119896
119895119901119894(119905) subjected to a piecewise
linear backlash function 119892 that includes a clearance of gapwidth 2119887
119895119901119894 Accordingly the dynamicmodel of a closed-form
gear set with 119899 planets includes 2119899 clearances In this closed-form planetary gear system damper is described by constantviscous damper coefficient 119888
119895119901119894 This is a rather simplified
mesh contact model in reality these contacts are subjected tothe hydro-elastic-dynamic regime of lubrication [10] In thispaper it is supposed that all planets 119901119894 (119894 = ℎ 119897) and theirrespective meshes with gear 119895 (1199041 1199042 or 1199031 1199032) are identicalso that 119896
119895119901119894(119905) 119887119895119901119894 and 119888
119895119901119894are the same for each 119895119901119894 mesh
except the phase angles of 119896119895119901119894(119905) which differ according to
planet phasing conditionsThus the nonlinear dynamic differential equations of
motion of closed-form planetary gear set can be establishedusing the Lagrange principle as follows
11987211988811198881+ 1198621198881119904211988811199042
minus
3
sum119894=1
(11986211990411198991199041119901ℎ119894
+ 11986211990311198991199031119901ℎ119894
) + 1198961198881119904211988011988811199042
minus
3
sum119894=1
[11989611990411198991198801199041119901ℎ119894
+ 11989611990311198991198801199031119901ℎ119894
] = 0
(4a)
11987211990311199031+ 1198621199031119903211990311199032
minus
3
sum119894=1
11986211990311198991199031119901ℎ119894
+ 1198961199031119903211988011990311199032
minus
3
sum119894=1
11989611990311198991198801199031119901ℎ119894
= 0
(4b)
11987211990411199041+
3
sum119894=1
11986211990411198991199041119901ℎ119894
+
3
sum119894=1
11989611990411198991198801199041119901ℎ119894
=119879in1199031199041
(4c)
119872119901ℎℎ119899minus 11986211990411198991199041119901ℎ119899
+ 11986211990311198991199031119901ℎ119899
minus 11989611990411198991198801199041119901ℎ119899
+ 11989611990311198991198801199031119901ℎ119899
= 0 (119899 = 1 2 3)
(4d)
4 Mathematical Problems in Engineering
11987211988821198882+ 11986211988821198882
minus
3
sum119894=1
(11986211990421198991199042119901119897119894
+ 11986211990321198991199032119901119897119894) + 11989611988821198801198882
minus
3
sum119894=1
[11989611990421198991198801199042119901119897119894
+ 11989611990321198991198801199032119901119897119894] = 0
(4e)
11987211990321199032minus 1198621199031119903211990311199032
1199031199031
1199031199032
minus
3
sum119894=1
11986211990321198991199032119901119897119894
minus 1198961199031119903211988011990311199032
1199031199031
1199031199032
minus
3
sum119894=1
11989611990321198991198801199032119901119897119894
=119879out1199031199032
(4f)
11987211990421199042minus 1198621198881119904211988811199042
1199031198881cos1205721199031199042
+
3
sum119894=1
11986211990421198991199042119901119897119894
minus 1198961198881119904211988011988811199042
1199031198881cos1205721199031199042
+
3
sum119894=1
11989611990421198991198801199042119901119897119894
= 0
(4g)
119872119901119897119897119899minus 11986211990421198991199042119901119897119899
+ 11986211990321198991199032119901119897119899
minus 11989611990421198991198801199042119901119897119899
+ 11989611990321198991198801199032119901119897119899
= 0 (119899 = 1 2 3) (4h)
where 1198681198881= 11986810158401198881+ 3119898119901ℎ11990321198881
is the equivalent mass momentof inertia of the carrier including planet gears in high-speedstage 1198681015840
1198881is the inertia of the carrier in high-speed stage
119898119901ℎ
is the actual mass of planet-gear in high-speed stageand 1199031198881
is the distribution circle radius of the planet gears1198681198881= 119872119888111990321198871198881
1198721198881
is the equivalent mass of the carrier inhigh-speed stage with respect to the its equivalent base circleradius 119903
1198871198881is equivalent base circle radius of the carrier in
high-speed stage 1199031198871198881= 1199031198881cos120572 119868
1199031= 119872119903111990321199031 and119872
1199031is the
equivalent mass of the ring in low-speed stage with respect toits base circle radius 119868
1199041= 119872119904111990321199041 and119872
1199041is the equivalent
mass of the sun gear in low-speed stage with respect to itsbase circle radius 119868
119901ℎ119899= 119872119901ℎ1199032119901ℎ and119872
119901ℎis the equivalent
mass of the planet-gear in high-speed stage with respect to itsequivalent base circle radius 119868
1198882= 1198681015840
1198882+31198981199011198971199032
1198882 and 1198681015840
1198882is the
moment of inertia of the carrier in low-speed stageDynamic model of motion of transmission has consider-
able difficulties in its solution procedure as follows (1) As asemidefinite system its first-order natural frequency is zerocorresponding to a rigid body motion (2) The piecewise-linear function 119892 represents the gear backlash and thenumber of variables is even different according to the externaland internal gear pairs (3) As both linear and nonlinearrestoring forces exist in the equations it is not possibleto write out the governing equation in matrix form whilea general solution technique applicable to the systems ofmultiple degrees of freedom must be based on matrix form
Therefore (4a)ndash(4h) are simplified further by introducinga set of new variables
1198801199041119901ℎ119899
= 1199061199041minus 1199061198881minus 119906ℎ119899 (5a)
1198801199031119901ℎ119899
= 119906ℎ119899minus 1199061198881minus 1199061199031 (5b)
11988011988811199042= 1199061198881minus1199031198881cos1205721199031199042
1199061199042 (5c)
1198801198882= 1199061198882 (5d)
1198801199042119901ℎ119899
= 1199061199042minus 1199061198882minus 119906119897119899 (5e)
1198801199032119901ℎ119899
= 119906119897119899minus 1199061198882minus 1199061199032 (5f)
11988011990311199032
= 1199061199031minus1199031199031
1199031199032
1199061199032 (5g)
The new coordinate variables defined previously not onlyhave intuitional physicalmeaning but also eliminate the rigidbody motion Furthermore the piecewise-linear backlashfunction 119892 can be written as a set of functions with a singlevariable according to (5a)ndash(5g)
In addition nondimensional parameters of (4a)ndash(4h) canbe obtained by a characteristic length 119887 and frequency 120596
119899=
radic11989611990411198991198721199041 such that
119905 = 120596119899119905 (6)
Hence a set of simplified equations of motions of thetransmission system is obtained by substituting (5a)ndash(5g) and(6) into (4a)ndash(4h)
1199041119901ℎ119899
+1
1205962119899
3
sum119894=1
[11986211990411198991199041119901ℎ119894
11987211990411198881
+11986211990311198991199031119901ℎ119894
1198721198881
]
+1
1205962119899
[11986211990411198991199041119901ℎ119899
minus 11986211990311198991199031119901ℎ119899
119872119901ℎ
minus1198621198881119904211988811199042
1198721198881
]
+1
1205962119899
3
sum119894=1
[
[
1198961199041119899119892 (1198801199041119901ℎ119894
)
11987211990411198881
+1198961199031119899119892 (1198801199031119901ℎ119894
)
1198721198881
]
]
+1
1205962119899
[
[
1198961199041119899119892 (1198801199041119901ℎ119899
) minus 1198961199031119899119892 (1198801199031119901ℎ119899
)
119872119901ℎ
minus11989611988811199042119892 (11988011988811199042)
1198721198881
]
]
=119879in
119903119904111987211990411198871205962119899
(119899 = 1 2 3)
(7a)
Mathematical Problems in Engineering 5
1199031119901ℎ119899
+1
1205962119899
[11986211990311198991199031119901ℎ119899
minus 11986211990411198991199041119901ℎ119899
119872119901ℎ
minus1198621198881119904211988811199042
1198721198881
minus1198621199031119903211990311199032
1198721199031
]
+1
1205962119899
3
sum119894=1
[11986211990411198991199041119901ℎ119894
1198721198881
+11986211990311198991199031119901ℎ119894
11987211988811199031
]
+1
1205962119899
3
sum119894=1
[
[
1198961199041119899119892 (1198801199041119901ℎ119894
)
1198721198881
+1198961199031119899119892 (1198801199031119901ℎ119894
)
11987211988811199031
]
]
+1
1205962119899
[
[
1198961199031119899119892 (1198801199031119901ℎ119899
) minus 1198961199041119899119892 (1198801199041119901ℎ119899
)
119872119901ℎ
minus11989611988811199042119892 (11988011988811199042)
1198721198881
minus11989611990311199032119892 (11988011990311199032)
1198721199031
]
]
= 0
(119899 = 1 2 3)
(7b)
11988811199042+11986211988811199042
11987211988811205962119899
11988811199042
minus1
1205962119899
3
sum119894=1
[11986211990411198991199041119901ℎ119894
+ 11986211990311198991199031119901ℎ119894
1198721198881
+119862119904211989911990421199011198971198941199031198881cos120572
11987211990421199031199042
]
+11986211988811199042
11987211990421205962119899
(1199031198881cos1205721199031199042
)
2
11988811199042+11989611988811199042119892 (11988011988811199042)
11987211988811205962119899
+11989611988811199042119892 (11988011988811199042)
11987211990421205962119899
(1199031198881cos1205721199031199042
)
2
minus1
1205962119899
3
sum119894=1
[
[
1198961199041119899119892 (1198801199041119901ℎ119894
) + 1198961199031119899119892(1198801199031119901ℎ119894
)
1198721198881
+1198961199042119899119892 (1198801199042119901119897119894) 1199031198881cos120572
11987211990421199031199042
]
]
= 0
(7c)
1198882+11986211988821198882
11987211988821205962119899
minus
3
sum119894=1
11986211990421198991199042119901119897119894
+ 11986211990321198991199032119901119897119894
11987211988821205962119899
+1198961198882119892 (1198801198882)
11987211988821205962119899
minus
3
sum119894=1
1198961199042119899119892 (1198801199042119901119897119894) + 1198961199032119899119892 (1198801199032119901119897119894)
11987211988821205962119899
= 0
(7d)
1199042119901119897119899
+1
1205962119899
3
sum119894=1
[11986211990421198991199042119901119897119894
1198721199042
+11986211990421198991199042119901119897119894
+ 11986211990321198991199032119901119897119894
1198721198882
]
+1
1205962119899
[11986211990421198991199042119901119897119899
minus 11986211990321198991199032119901119897119899
119872119901119897
minus11986211988821198882
1198721198882
minus11986211988811199042
1198721199042
1199031198881cos120572
11988811199042
1199031199042
]
+1
1205962119899
3
sum119894=1
[
[
1198961199042119899119892 (1198801199042119901119897119894)
1198721199042
+1198961199042119899119892 (1198801199042119901119897119894) + 1198961199032119899119892 (1198801199032119901119897119894)
1198721198882
]
]
+1
1205962119899
[
[
1198961199042119899119892 (1198801199042119901119897119899
) minus 1198961199032119899119892 (1198801199032119901119897119899
)
119872119901119897
minus1198961198882119892 (1198801198882)
1198721198882
minus11989611988811199042
1198721199042
times119892 (11988011988811199042) 1199031198881cos120572
1199031199042
]
]
= 0 (119899 = 1 2 3)
(7e)
1199032119901119897119899
+1
1205962119899
[11986211990321198991199032119901119897119899
minus 11986211990421198991199042119901119897119899
119872119901119897
minus11986211988821198882
1198721198882
+11986211990311199032119903119903111990311199032
11987211990321199031199032
]
+1
1205962119899
3
sum119894=1
[11986211990421198991199042119901119897119894
+ 11986211990321198991199032119901119897119894
1198721198882
+11986211990321198991199032119901119897119899
1198721199032
]
+1
1205962119899
[
[
1198961199032119899119892 (1198801199032119901119897119899
)minus1198961199042119899119892 (1198801199042119901119897119899
)
119872119901119897
minus1198961198882119892 (1198801198882)
1198721198882
+119896119903111990321199031199031119892 (11988011990311199032)
11987211990321199031199032
]
]
6 Mathematical Problems in Engineering
+1
1205962119899
3
sum119894=1
[
[
1198961199042119899119892 (1198801199042119901119897119894)+1198961199032119899119892 (1198801199032119901119897119894)
1198721198882
+1198961199032119899119892 (1198801199032119901119897119894)
1198721199032
]
]
=minus119879out
119872119903211990311990321198871205962119899
(119899 = 1 2 3)
(7f)
11990311199032+1198621199031119903211990311199032
119872119903111990321205962119899
+1
1205962119899
3
sum119894=1
(11986211990321198991199031199031
11987211990321199031199032
1199032119901119897119894
minus1198621199031119899
1198721199031
1199031119901ℎ119894
)
+11989611990311199032119892 (11988011990311199032)
119872119903111990321205962119899
+1
1205962119899
3
sum119894=1
(11989611990321198991199031199031119892 (1198801199032119901119897119894)
11987211990321199031199032
minus1198961199031119899119892 (1198801199031119901ℎ119894
)
1198721199031
)
= minus119879out1199031199031
1198721199032119903211990321198871205962119899
(7g)
where1
11987211990411198881
=1
1198721199041
+1
1198721198881
1
11987211988811199031
=1
1198721198881
+1
1198721199031
1
11987211990311199032
=1
1198721199031
+1199031199031
11987211990321199031199032
(8)
Equations (7a)ndash(7g) can be written in matrix form as
U + CU + K119892 (U) = T (9)
where the piecewise-linear backlash function is defined as
119892 [119880119894119895(119905)] =
119880119894119895(119905) minus 119887
119894119895 119880119894119895gt 119887119894119895
0 minus119887119894119895le 119880119894119895le 119887119894119895
119880119894119895(119905) + 119887
119894119895 119880119894119895lt minus119887119894119895
(10)
3 Solution of Dynamic Equations
31 Dynamic Response Using the Numerical IntegrationIn this section the mathematical model will be solvednumerically by the variable step-size Runge-Kutta integrationmethod firstly The parameters of the closed-form planetarygear set shown in Figure 1 are given in Tables 1 and 2 In thiswork the values of the gearmesh damping coefficients119862
119894119895are
assumed to be constants as 001 [11]By resolving the dynamic differential equations of
motions the dynamic responses (displacement and speed) oflow-stage carrier are gained as shown in Figure 3
32The Acquisition of Analytical Solutions In order to estab-lish the optimization mathematical model of the dynamicbehavior of the closed-form planetary gear set it is necessaryto obtain the analytical solutions ofmodel using the harmonicbalancemethod For limiting the number of algebraic balanceequations only the fundamental frequency harmonic of themesh stiffness functions are considered in this case Similarlyexternal torque functions is also considered to be in the formof mesh stiffness functions And then attention is paid to theperiodic vibrations of system under the harmonic excitationThe procedure of solving (7a)ndash(7g) using HBM [5] includessome aspects as follows(1) According to the assumption previously mentioned
the external excitations that represent fundamental frequencypulsations can be written in the form
T = T119898119894+ T119886119894cos (Ω119905 + 120601
119894) (11)
where T119898119894
is the mean component of torque and T119886119894is the
amplitude of the alternating component of the fundamentalfrequency mesh force 120601
119894is the phase angle
(2) According to the harmonic excitations given in(11) the harmonic balance method solution to (7a)ndash(7g) isassumed in the same form
U = U119898119894+ U119886119894cos (Ω119905 + 120601
119894) (12)
whereU119898119894
andU119886119894are the mean and alternating components
of the steady state response respectively and 120601119894is the phase
angle(3) For relative mesh displacements the piecewise-linear
function in (4a)ndash(4h) can be written in a unified form
119892 (119880119894) = 119873
119898119894119880119898119894+ 119873119886119894119880119886119894cos (Ω119905 + 120601
119894) (13)
where
119873119898119894= 1 +
119902119886119894
2119902119898119894
[119866 (120583+) minus 119866 (120583
minus)]
119873119886119894= 1 minus
1
2[119867 (120583
+) minus 119867 (120583
minus)]
(14)
The expressions of 119866 and119867 are given in the Appendix(4) Considering the mean value and the fundamental
harmonic value of periodically time-varying mesh stiffnessin Figure 2 the elements of stiffness matrix K in (9) can bewritten as
119896119894119895= 119896119898119894119895+ 119896119886119894119895
cos (Ω120591 + 120593119894119895) (15)
So the stiffness matrix K is written in terms of two separatematrices for mean stiffness and alternating stiffness as
K = K119898+ ΔK (16)
where
K119898= [119896119898119894119895]119899times119899
ΔK = [119896119886119894119895
cos (Ω120591 + 120593119894119895)]119899times119899
(17)
Mathematical Problems in Engineering 7
Table 1 Geometric parameters of the closed-form planetary gear set
High-speed stage Low-speed stageSun gear Planet gear Ring gear Sun gear Planet gear Ring gear
Number of teeth 16 38 92 16 24 62Module (mm) 3 3Pressure angle (deg) 215∘ 215∘
Modification coefficient 03 012 054 0475 0471 0309Face width (mm) 22 20 20 345 30 32
Table 2 Physical parameters of the closed-form planetary gear set
High-speed stage Low-speed stageSun Planet Ring Carrier Sun Planet Ring Carrier
Inertia (kgsdotmm2) 8854 827 6888372 680079 33959 46292 11021396 94009Rotation radius (mm) 1107 3278 113 5725 2328 3112 113 28Mean mesh stiffness (Nmm) 119870
1199041119899= 1198701199031119899= 21198907 119870
1199042119899= 1198701199032119899= 21198907
Torsional stiffness (Nmm) 11987011988811199042= 21198907 119870
11990311199032= 101198907 119870
1198882= 101198908
Total mass 69 kg
By substituting (9)ndash(14) into (7a)ndash(7g) and balancing the likeharmonic terms the algebraic equations of system can begained
K119898y119898+K1y3
2+K2y4
2minus T119898= 0119899times1
K119898y3+ K1y119898minus Ω2y1minus ΩCy
2minus T1= 0119899times1
K119898y4+ K2y119898minus Ω2y2+ CΩy
1minus T2= 0119899times1
(18)
where y1= 119902
119886119894cos120593119894119899times1
y2= 119902
119886119894sin120593119894119899times1
y3=
119873119886119894119902119886119894cos120593119894119899times1
y4= 119873119886119894119902119886119894sin120593119894119899times1
y119898= 119873119898119894119902119898119894119899times1
T1
= 119879119886119894cos120601119894119899times1
T2
= 119879119886119894sin120601119894119899times1
K1
=
119896119886119894119895
cos120601119894119895119899times1
and K2= 119896119886119894119895
sin120601119894119895119899times1
The matrices k
119898and C are given in the Appendix
4 Optimization of the Transmission System
41 Variables and Objective Function of Optimization Anumber of key design parameters have great influence onthe dynamic characteristics of the gear transmissions sothey can be chosen as design variables such as numberof each gear module gear width and pressure angle Tosimplify optimization process the module of each stage 119898
1
1198982 number of sun gears of each stage 119911
1199041 1199111199042 and pressure
angle of each stage1205721 1205722are chosen as optimization variables
in this study So the recurrence variables vector for thisoptimization procedure can be written as
119909 = [1198981 1198982 1199111199041 1199111199042 1205721 1205722]119879
(19)
The dynamic characteristics standards of the gear trans-mission include maximum dynamic loads dynamic loadfactor stiffness and displacementvelocityacceleration ofvibration each of these standards can be chosen as opti-mization objective Considering that the rotation centerof the planets in low-stage is unfixed and reducing the
total weight of the transmission system simultaneously thedisplacement of rotational vibration of the low-stage carrierand total mass of the gear set are chosen as optimizationobjective According to the basic idea of the multiobjectiveoptimization two optimization objective functions unifiedusing the normalized weighting method [11] can be writtenin form
119891 = 12058211198911+ 12058221198912 (20)
where 1205821and 120582
2are weighting coefficient here 120582
1= 03
and 1205822= 07 [12] 119891
1and 119891
2are the ampler of the rotational
vibration displacement of the low-stage carrier and totalmass of the gear set respectively Due to limited space theexpressions of 119891
1and 119891
2are not given in detail
42 Constraints
(1) Distributing the number of teeth of each gear con-centric conditions adjacent conditions and assemblyconditions
(2) contact fatigue strength and bending fatigue strengthconstraints
119878119867(119894) ge 119878
119867min 119878119865(119894) ge 119878
119865min
119894 = 1199041 1199042 1199031 1199032 119901ℎ 119901119897
(21)
(3) contact ratio constraints
120576119894119895ge 15 119894 = 119904
1 1199042 1199031 1199032 119895 = 119901ℎ 119901119897 (22)
(4) transmission ratio without loop-power conditions
minus32 le 1198941+ 1198942minus 11989411198942le minus30
0 lt1198942minus 11989411198942
1198941+ 1198942minus 11989411198942
lt 1(23)
8 Mathematical Problems in Engineering
Table 3 Parameters of structure after optimization
High-speed stage Low-speed stageSun gear Planet gear Ring gear Sun gear Planet gear Ring gear
Number of teeth 17 40 97 18 23 66Module (mm) 2 3Pressure angle (deg) 20∘ 20∘
Total mass (kg) 635 kg
0 5 10 15 20 25minus5
minus4
minus3
minus2
minus1
0
1
2
3 Displacement of low-stage carrier
Time (s)
Non
dim
ensio
nal d
ispla
cem
ent
(a) Displacement of low-speed stage carrier
0 5 10 15 20 25minus15
minus1
minus05
0
05
1
15
Time (s)
Non
dim
ensio
nal s
peed
Speed of low-stage carrier
(b) Speed of low-speed stage carrier
Figure 3 Response of low-speed stage carrier without optimization
0 5 10 15 20 25minus5
minus4
minus3
minus2
minus1
0
1
2
3Displacement of low-stage carrier
Time (s)
Non
dim
ensio
nal d
ispla
cem
ent
(a) Displacement of low-speed stage carrier
0 5 10 15 20 25minus15
minus1
minus05
0
05
1
15
Time (s)
Non
dim
ensio
nal s
peed
Speed of low-stage carrier
(b) Speed of low-speed stage carrier
Figure 4 Response of low-speed stage carrier after optimization
where
119894119899= minus119885119903119899
119885119904119899
119899 = 1 2 (24)
(5) minimum tooth thickness constraints
119878119886119894ge 04119898
119895 119894 = 119904
1 1199042 1199031 1199032 119901ℎ 119901119897 119895 = 1 2 (25)
5 Results and Discussions
Some more logical parameters of the closed-form planetarygear set are obtained according to optimization constraintsconditions previously mentioned119898
1= 2 119898
2= 3 119885
1199041= 17
1198851199042= 18 120572
1= 1205722= 20∘ Further other parameters of
transmission can be computed as shown in Table 3 Total
Mathematical Problems in Engineering 9
mass of gear set is 635 kg Comparing the results betweenbefore and after the optimization it is clear that transmissionsystem reduces the total mass of 86 and the dynamiccharacteristic significantly improves as well It is also evidentfrom the comparison of Figure 3 with Figure 4 that thedisplacement of each structure significantly reduces at thesame time It is obvious that the scope of the amplitude ofdisplacement of low-stage carrier is minus3 to 3 in Figure 4(a)while that in Figure 3(a) is minus5 to 3
6 Conclusions
Considering the gear backlash time-varying mesh stiffnessand excitation fluctuation and so forth a discrete nonlineardynamic model of a two stages closed-form planetary set wasproposed in this study In order to facilitate the analysis andcomparison of system response between before and after opti-mization nonlinear differential equations of motion of thedynamic model were solved using a Runge-Kutta numericalintegrationmethod For optimization of transmission systemthe analytical solutions were obtainedThe total optimizationobjective function is obtained using the normalized weightsmethod
A case shows that the total mass of transmission systemhas significantly reduced and dynamic characteristic has dis-tinctly improved Effectiveness of the dynamicmodel and thedynamic optimization mathematic model is demonstrated
Appendix
Consider the following
119866 (120583) =
(2
120587)(120583 sinminus1120583 + radic1 minus 1205832) 1003816100381610038161003816120583
1003816100381610038161003816 le 1
10038161003816100381610038161205831003816100381610038161003816
10038161003816100381610038161205831003816100381610038161003816 gt 1
119867 (120583) =
minus1 120583 lt minus1
(2120583
120587)(sinminus1120583 + radic1 minus 1205832) 1003816100381610038161003816120583
1003816100381610038161003816 le 1
1 120583 gt 1
(A1)
The elements of the stiffness matrix k119898are given as follows
119896 (1 1) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
+1
119872119901ℎ
)
119896 (1 119894) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
) 119894 = 2 3
119896 (1 4) =1198961199031119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (1 119894) =1198961199031119899
11987211988811205962119899
119894 = 5 6
119896 (1 7) = minus11989611988811199042
11987211988811205962119899
119896 (2 119894) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
) 119894 = 1 3
119896 (2 7) = minus11989611988811199042
11987211988811205962119899
119896 (2 2) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
+1
119872119901ℎ
)
119896 (2 119894) =1198961199031119899
11987211988811205962119899
119894 = 4 6
119896 (2 5) =1198961199031119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (2 119894) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
) 119894 = 1 3
119896 (2 2) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
+1
119872119901ℎ
)
119896 (2 119894) =1198961199031119899
11987211988811205962119899
119894 = 4 6
119896 (2 5) =1198961199031119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (2 7) = minus11989611988811199042
11987211988811205962119899
119896 (3 119894) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
) 119894 = 1 2
119896 (3 3) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
+1
119872119901ℎ
)
119896 (3 119894) =1198961199031119899
11987211988811205962119899
119894 = 4 5
119896 (3 6) =1198961199031119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (3 7) = minus11989611988811199042
11987211988811205962119899
119896 (4 1) =1198961199041119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (4 119894) =1198961199041119899
11987211988811205962119899
119894 = 2 3
119896 (4 7) = minus11989611988811199042
11987211988811205962119899
119896 (4 4) =1198961199031119899
1205962119899
(1
119872119901ℎ
+1
1198721198881
+1
1198721199031
)
10 Mathematical Problems in Engineering
119896 (4 119894) =1198961199031119899
1205962119899
(1
1198721198881
+1
1198721199031
) 119894 = 5 6
119896 (4 15) = minus11989611990311199032
11987211990311205962119899
119896 (5 119894) =1198961199041119899
11987211988811205962119899
119894 = 1 3
119896 (5 2) =1198961199041119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (5 119894) =1198961199031119899
1205962119899
(1
1198721198881
+1
1198721199031
) 119894 = 5 6
119896 (5 5) =1198961199031119899
1205962119899
(1
119872119901ℎ
+1
1198721198881
+1
1198721199031
)
119896 (5 7) = minus11989611988811199042
11987211988811205962119899
119896 (5 15) = minus11989611990311199032
11987211990311205962119899
119896 (6 119894) =1198961199041119899
11987211988811205962119899
119894 = 1 2
119896 (6 3) =1198961199041119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (6 119894) =1198961199031119899
1205962119899
(1
1198721198881
+1
1198721199031
) 119894 = 4 5
119896 (6 6) =1198961199031119899
1205962119899
(1
119872119901ℎ
+1
1198721198881
+1
1198721199031
)
119896 (6 7) = minus11989611988811199042
11987211988811205962119899
119896 (6 15) = minus11989611990311199032
11987211990311205962119899
119896 (7 119894) = minus1198961199041119899
11987211988811205962119899
119894 = 1 2 3
119896 (7 119894) = minus1198961199031119899
11987211988811205962119899
119894 = 4 5 6
119896 (7 7) =11989611988811199042
1205962119899
[1
1198721198881
+1
1198721199042
(1199031198881cos1205721199031199042
)
2
]
119896 (7 119894) = minus1198961199042119899
11987211990421205962119899
1199031198881cos1205721199031199042
119894 = 9 10 11
119896 (8 8) =1198961198882
11987211988821205962119899
119896 (8 119894) = minus1198961199042119899
11987211988821205962119899
119894 = 9 10 11
119896 (8 119894) = minus1198961199032119899
11987211988821205962119899
119894 = 12 13 14
119896 (9 7) = minus11989611988811199042
11987211990421205962119899
1199031198881cos1205721199031199042
119896 (9 8) = minus1198961198882
11987211988821205962119899
119896 (9 9) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
+1
119872119901119897
)
119896 (9 119894) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
) 119894 = 10 11
119896 (9 12) =1198961199032119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (9 119894) =1198961199032119899
11987211988821205962119899
119894 = 13 14
119896 (10 7) = minus11989611988811199042
11987211990421205962119899
1199031198881cos1205721199031199042
119896 (10 8) = minus1198961198882
11987211988821205962119899
119896 (10 119894) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
) 119894 = 9 10
119896 (10 10) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
+1
119872119901119897
)
119896 (10 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 14
119896 (10 13) =1198961199032119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (11 7) = minus11989611988811199042
11987211990421205962119899
1199031198881cos1205721199031199042
119896 (11 8) = minus1198961198882
11987211988821205962119899
119896 (11 119894) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
) 119894 = 9 10
119896 (11 11) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
+1
119872119901119897
)
119896 (11 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 13
119896 (11 14) =1198961199032119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (12 8) = minus1198961198882
11987211988821205962119899
Mathematical Problems in Engineering 11
119896 (12 15) =119896119903111990321199031199031
119872119903212059621198991199031199032
119896 (12 9) =1198961199042119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (12 119894) =1198961199042119899
11987211988821205962119899
119894 = 10 11
119896 (12 12) =1198961199032119899
1205962119899
(1
119872119901119897
+1
1198721198882
)
119896 (12 119894) =1198961199032119899
11987211988821205962119899
119894 = 13 14
119896 (13 8) = minus1198961198882
11987211988821205962119899
119896 (13 10) =1198961199042119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (13 119894) =1198961199042119899
11987211988821205962119899
119894 = 9 11
119896 (13 13) =1198961199032119899
1205962119899
(1
119872119901119897
+1
1198721198882
)
119896 (13 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 14
119896 (13 15) =119896119903111990321199031199031
119872119903212059621198991199031199032
119896 (14 8) = minus1198961198882
11987211988821205962119899
119896 (14 11) =1198961199042119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (14 119894) =1198961199042119899
11987211988821205962119899
119894 = 9 10
119896 (14 14) =1198961199032119899
1205962119899
(1
119872119901119897
+1
1198721198882
)
119896 (14 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 13
119896 (14 15) =119896119903111990321199031199031
119872119903212059621198991199031199032
119896 (15 119894) = minus1198961199031119899
11987211990311205962119899
119894 = 4 5 6
119896 (15 119894) =11989611990321198991199031199031
119872119903211990311990321205962119899
119894 = 12 13 14
119896 (15 15) =11989611990311199032
1205962119899
(1
1198721199031
+1199031199031
11987211990321199031199032
)
(A2)
The elements of k119898not listed previously are taken as zeros
The matrix C is in the similar form of k119898and no longer is
listed in detail here
Notations
HBM Harmonic balance method119887 Half of clearance (backlash)119896 Gear mesh stiffness119903 Ring gear119892 Discontinuous displacement function119868 Polar mass moment of inertia119894 Transmission ratio119888 Carrier119898 Actual mass119905 Dimensional time119906 Actual equivalent transverse displacement in
the direction of pressure line119880 Relative equivalent transverse displacement
in the direction of pressure line119904 Sun gear119899119901 Number of planet
T Torque120579 Angular displacement119862 Damping coefficient119885 Number of gear119903 Base cycle radius119872 Equivalent mass119905 Nondimensional time120572 Pressure angle
Acknowledgments
Thiswork is supported by theNational Natural Science Foun-dation of China (no 51175299) Shandong Province NaturalScience Foundation of China (ZR2010EM012) and ShandongUniversity Independent Innovation Foundation ofChina (no2012TS048)
References
[1] F Cunliffe J D Smith and D B Welbourn ldquoDynamic toothloads in epicyclic gearsrdquo Transactions of the ASME Journal ofEngineering for Industry vol 96 no 2 pp 578ndash584 1974
[2] M Botman ldquoEpicyclic gear vibrationsrdquo Transactions of theASME Journal of Engineering for Industry vol 98 no 3 pp 811ndash815 1976
[3] G Antony ldquoGear vibration-investigation of the dynamic behav-ior of one stage epicyclic gearsrdquo AGMA Technical Paper 88-FTM-12 1988
[4] A Kahraman ldquoFree torsional vibration characteristics of com-pound planetary gear setsrdquo Mechanism and Machine Theoryvol 36 no 8 pp 953ndash971 2001
[5] T Sun and H Hu ldquoNonlinear dynamics of a planetary gearsystem with multiple clearancesrdquo Mechanism and MachineTheory vol 38 no 12 pp 1371ndash1390 2003
[6] A Al-shyyab and A Kahraman ldquoA non-linear dynamic modelfor planetary gear setsrdquo Proceedings of the Institution ofMechan-ical Engineers K Journal of Multi-body Dynamics vol 221 no 4pp 567ndash576 2007
12 Mathematical Problems in Engineering
[7] A Al-Shyyab K Alwidyan A Jawarneh and H Tlilan ldquoNon-linear dynamic behaviour of compound planetary gear trainsmodel formulation and semi-analytical solutionrdquo Proceedings ofthe Institution of Mechanical Engineers K Journal of Multi-bodyDynamics vol 223 no 3 pp 199ndash210 2009
[8] T Zeng Bao Z Yi Fang and L Wei Zhong ldquoMany stage helicalgear train systemoptimal designwhich takes the dynamic prop-erties as an objective functionrdquo Chinese Journal of MechanicalEngineering vol 30 no 5 pp 66ndash75 1994 (Chinese)
[9] X Guan Wei Y Jia Jun X LaiYuan et al ldquoDynamic optimaldesign on planetary driverrdquoMechanical Science and Technologyvol 17 no 2 pp 209ndash217 1998 (Chinese)
[10] G W Blankenship and A Kahraman ldquoSteady state forcedresponse of a mechanical oscillator with combined parametricexcitation and clearance type non-linearityrdquo Journal of Soundand Vibration vol 185 no 5 pp 743ndash765 1995
[11] HGuang andWGuiCheng ldquoDynamics optimization design ofclosed epicyclic gear trainsrdquoMechanical Science and Technologyvol 23 no 9 pp 1131ndash1134 2004 (Chinese)
[12] D-T Qin X-G Gu J-H Wang and J-G Liu ldquoDynamicanalysis and optimization of gear trains in amegawatt level windturbinerdquo Journal of Chongqing University vol 32 no 4 pp 408ndash414 2009 (Chinese)
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
r2
r1
C1
S2S1
Tin Tout
phpL
Differentialplanetary
Quasi-planetary
(a)
Tin Tout
Kr1r2
Kr2n
Kr1n
Kc2
Ks2n
Ks1n
Ks1Kr
Kc1s2
(b)
Figure 1 (a) A closed-form planetary gear system (b) A discrete model of closed-form planetary gear system
planetary stage has a distinct fundamental mesh frequencyand any number of planets spaced in any angular positionsusing multiterm HBM
Those studies cited previously are mainly aimed at themodeling of planetary gear trains the analysis of dynamicresponse as well as the analysis of parameters stability andso on Whereas the studies on nonlinear dynamic optimi-zation design of planetary transmission system with multipleclearances are still very limited Zeng Bao [8] and GuanWei [9] investigated multistage helical gear trains and single-stage planetary gear train taking the dynamic propertiesas objective functions respectively But in their studiesthe design variables of optimization were limited to theseparameters the number of gears the pitch-cycle helical-angle and the modification coefficients This study aims atproviding numerical solutions and analytical solutions for thedynamic response of a closed-form planetary gear train hav-ing three planets spaced equally position angle using Runge-Kutta numerical integration and HBM respectively Basedon the analytical solution the optimization mathematicalmodel that focused on minimizing the vibration accelerationof structure and the total mass of the gear transmissionsystem is established Some key design parameters such as thenumber of each gear the module of each stage planetary thetransmission ratio of each stage planetary and the pressureangle are chosen as design varies This study is available forthe designing of closed-form planetary gear sets of bothmin-imum weight and best dynamic characteristic for reference
2 Dynamic Model of System
21 Model and Assumptions The closed-form planetary geartrain consists of a single-stage differential planetary (low-speed stage) and a single-stage quasi-planetary (high-speedstage carrier is fixed) in this study as shown in Figure 1 Eachstage is comprised of three central elements the sun gear(1199041 1199042) the ring gear (119903
1 1199032) and carrier (119888
1 1198882) Each stage
Crp
Crp
Crp
Csp
Csp
Csp
Krp
Krp
Krp
Ksp
KspKsp
Uc
Us
Up3
Up2
Up1
Tin
Figure 2 Lumped parameter dynamic model of single-stage plane-tary gear set
planetary has 119899planet gearsTheparameter 119899 representing thenumber of planet gears is taken as 3 throughout this paperThe planets of each stage are free to rotate with respect totheir common carrier All the gears aremounted on their rigidshafts supported by rolling element bearings The two ringsare connected by torsional linear springs of stiffness 119896
11990311199032
as shown in Figure 2 Likewise the other central elements1198881 1198882and 1199041 1199042are constrained by torsional linear springs
of stiffness 11989611988811199042
1198961198882
and 1198961199041 11989611988811199042
respectively In order toestablish themathematical model of the transmission systema number of simplified assumptions are introduced in the caseof speed reduction in the closed-form planetary gear set asshown in Figure 1
Mathematical Problems in Engineering 3
(1) All of the gears in the set are assumed to be rigid andthe flexibilities of each gear teeth at the gear meshinterface are modeled by an equivalent spring havingtime-varying stiffness acting along the mesh direc-tions These periodically time-varying mesh stiff-nesses are subject to piece-linear functions represent-ing gear backlashes
(2) Because the bending stiffness of shafts in the set isvery large the deflection of these shafts can be ne-glected Thus the transverse displacements of gearsare not considered
(3) Because the damping mechanisms at the gear meshesand bearings of a planetary gear set are not easy to givea description of mathematical model viscous gearmesh damping elements are introduced to representenergy dissipation of the transmission system
22 Equivalent Displacements In order to establish the equa-tions of motion easily all of torsional angular displacementsare unified on the pressure line in terms of equivalentdisplacements The equivalent transverse displacements inthe mesh line direction caused by rotational displacementsare written as follows
119906119888119895= 119903119888119895120579119888119895 119906119903119895= 119903119903119895120579119903119895 119906119904119895= 119903119904119895120579119904119895 119906119901119895119899= 119903119901119895120579119895119899
119895 = 1 2 119899 = 1 2 3
(1)
where 120579 and 119903 (subscripts 119888119895 119903119895 119904119895 119895119899 119895 = ℎ 119897 119899 = 1 2 3)are angular displacements and base circle radius of the partsrespectively While 119903 (subscripts 1198881 1198882) is the equivalent basecircle radius of the carriers defined as follows
1199031199041+ 119903119901ℎ= 1199031199031minus 119903119901ℎ= 1199031198881cos120572
1199031199042+ 119903119901119897= 1199031199032minus 119903119901119897= 1199031198882cos120572
(2)
With the symbol 119880 is used to represent the relativedisplacements in the direction of pressure line the relativedisplacements are obtained according to themeshing relationand the equivalent displacements as follows The positivedirection of the relative displacements is assumed to be thesame direction of the compressive deformation The relativedisplacements of the parts in the pressure line direction arewritten as follows
1198801199041119901ℎ119894
= 1199031199041(1205791199041minus 1205791198881) minus 119903119901ℎ(120579ℎ119894+ 1205791198881)
= 11990311990411205791199041minus 11990311988811205791198881cos120572 minus 119903
119901ℎ120579ℎ119894
(3a)
1198801199031119901ℎ119894
= 119903119901ℎ(120579ℎ119894+ 1205791198881) minus 1199031199031(1205791199031+ 1205791198881)
= 119903119901ℎ120579ℎ119894minus 11990311988811205791198881cos120572 minus 119903
11990311205791199031
(3b)
11988011988811199042= 1199031198881(1205791198881minus 1205791199042) cos120572 (3c)
1198801198882= 11990311988821205791198882cos120572 (3d)
1198801199042119901119897119894
= 1199031199042(1205791199042minus 1205791198882) minus 119903119901119897(120579119897119894+ 1205791198882)
= 11990311990421205791199042minus 11990311988821205791198882cos120572 minus 119903
119901119897120579119897119894
(3e)
1198801199032119901119897119894
= 119903119901119897(120579119897119894+ 1205791198882) minus 1199031199032(1205791199032+ 1205791198882)
= 119903119901119897120579119897119894minus 11990311988821205791198882cos120572 minus 119903
11990321205791199032
(3f)
11988011990311199032
= 1199031199031(1205791199031minus 1205791199032) (3g)
23 Equations of Motion The closed-form planetary gearsystem consists of four different kinds of gear pairs theexternal gear pair that is the sun gearplanet gear-119894 pair(subscripts 1199041 119901ℎ119894 and 1199042 119901119897119894) and the internal gear pairthat is the ring gearplanet gear-119894 pair (subscripts 1199031 119901ℎ119894and 1199032 119901119897119894) The mesh of gear 119895 (119904119894 or 119903119894 119894 = 1 2) with aplanet 119901119894 (119894 = ℎ 119897) is represented by a periodically time-varying stiffness element 119896
119895119901119894(119905) subjected to a piecewise
linear backlash function 119892 that includes a clearance of gapwidth 2119887
119895119901119894 Accordingly the dynamicmodel of a closed-form
gear set with 119899 planets includes 2119899 clearances In this closed-form planetary gear system damper is described by constantviscous damper coefficient 119888
119895119901119894 This is a rather simplified
mesh contact model in reality these contacts are subjected tothe hydro-elastic-dynamic regime of lubrication [10] In thispaper it is supposed that all planets 119901119894 (119894 = ℎ 119897) and theirrespective meshes with gear 119895 (1199041 1199042 or 1199031 1199032) are identicalso that 119896
119895119901119894(119905) 119887119895119901119894 and 119888
119895119901119894are the same for each 119895119901119894 mesh
except the phase angles of 119896119895119901119894(119905) which differ according to
planet phasing conditionsThus the nonlinear dynamic differential equations of
motion of closed-form planetary gear set can be establishedusing the Lagrange principle as follows
11987211988811198881+ 1198621198881119904211988811199042
minus
3
sum119894=1
(11986211990411198991199041119901ℎ119894
+ 11986211990311198991199031119901ℎ119894
) + 1198961198881119904211988011988811199042
minus
3
sum119894=1
[11989611990411198991198801199041119901ℎ119894
+ 11989611990311198991198801199031119901ℎ119894
] = 0
(4a)
11987211990311199031+ 1198621199031119903211990311199032
minus
3
sum119894=1
11986211990311198991199031119901ℎ119894
+ 1198961199031119903211988011990311199032
minus
3
sum119894=1
11989611990311198991198801199031119901ℎ119894
= 0
(4b)
11987211990411199041+
3
sum119894=1
11986211990411198991199041119901ℎ119894
+
3
sum119894=1
11989611990411198991198801199041119901ℎ119894
=119879in1199031199041
(4c)
119872119901ℎℎ119899minus 11986211990411198991199041119901ℎ119899
+ 11986211990311198991199031119901ℎ119899
minus 11989611990411198991198801199041119901ℎ119899
+ 11989611990311198991198801199031119901ℎ119899
= 0 (119899 = 1 2 3)
(4d)
4 Mathematical Problems in Engineering
11987211988821198882+ 11986211988821198882
minus
3
sum119894=1
(11986211990421198991199042119901119897119894
+ 11986211990321198991199032119901119897119894) + 11989611988821198801198882
minus
3
sum119894=1
[11989611990421198991198801199042119901119897119894
+ 11989611990321198991198801199032119901119897119894] = 0
(4e)
11987211990321199032minus 1198621199031119903211990311199032
1199031199031
1199031199032
minus
3
sum119894=1
11986211990321198991199032119901119897119894
minus 1198961199031119903211988011990311199032
1199031199031
1199031199032
minus
3
sum119894=1
11989611990321198991198801199032119901119897119894
=119879out1199031199032
(4f)
11987211990421199042minus 1198621198881119904211988811199042
1199031198881cos1205721199031199042
+
3
sum119894=1
11986211990421198991199042119901119897119894
minus 1198961198881119904211988011988811199042
1199031198881cos1205721199031199042
+
3
sum119894=1
11989611990421198991198801199042119901119897119894
= 0
(4g)
119872119901119897119897119899minus 11986211990421198991199042119901119897119899
+ 11986211990321198991199032119901119897119899
minus 11989611990421198991198801199042119901119897119899
+ 11989611990321198991198801199032119901119897119899
= 0 (119899 = 1 2 3) (4h)
where 1198681198881= 11986810158401198881+ 3119898119901ℎ11990321198881
is the equivalent mass momentof inertia of the carrier including planet gears in high-speedstage 1198681015840
1198881is the inertia of the carrier in high-speed stage
119898119901ℎ
is the actual mass of planet-gear in high-speed stageand 1199031198881
is the distribution circle radius of the planet gears1198681198881= 119872119888111990321198871198881
1198721198881
is the equivalent mass of the carrier inhigh-speed stage with respect to the its equivalent base circleradius 119903
1198871198881is equivalent base circle radius of the carrier in
high-speed stage 1199031198871198881= 1199031198881cos120572 119868
1199031= 119872119903111990321199031 and119872
1199031is the
equivalent mass of the ring in low-speed stage with respect toits base circle radius 119868
1199041= 119872119904111990321199041 and119872
1199041is the equivalent
mass of the sun gear in low-speed stage with respect to itsbase circle radius 119868
119901ℎ119899= 119872119901ℎ1199032119901ℎ and119872
119901ℎis the equivalent
mass of the planet-gear in high-speed stage with respect to itsequivalent base circle radius 119868
1198882= 1198681015840
1198882+31198981199011198971199032
1198882 and 1198681015840
1198882is the
moment of inertia of the carrier in low-speed stageDynamic model of motion of transmission has consider-
able difficulties in its solution procedure as follows (1) As asemidefinite system its first-order natural frequency is zerocorresponding to a rigid body motion (2) The piecewise-linear function 119892 represents the gear backlash and thenumber of variables is even different according to the externaland internal gear pairs (3) As both linear and nonlinearrestoring forces exist in the equations it is not possibleto write out the governing equation in matrix form whilea general solution technique applicable to the systems ofmultiple degrees of freedom must be based on matrix form
Therefore (4a)ndash(4h) are simplified further by introducinga set of new variables
1198801199041119901ℎ119899
= 1199061199041minus 1199061198881minus 119906ℎ119899 (5a)
1198801199031119901ℎ119899
= 119906ℎ119899minus 1199061198881minus 1199061199031 (5b)
11988011988811199042= 1199061198881minus1199031198881cos1205721199031199042
1199061199042 (5c)
1198801198882= 1199061198882 (5d)
1198801199042119901ℎ119899
= 1199061199042minus 1199061198882minus 119906119897119899 (5e)
1198801199032119901ℎ119899
= 119906119897119899minus 1199061198882minus 1199061199032 (5f)
11988011990311199032
= 1199061199031minus1199031199031
1199031199032
1199061199032 (5g)
The new coordinate variables defined previously not onlyhave intuitional physicalmeaning but also eliminate the rigidbody motion Furthermore the piecewise-linear backlashfunction 119892 can be written as a set of functions with a singlevariable according to (5a)ndash(5g)
In addition nondimensional parameters of (4a)ndash(4h) canbe obtained by a characteristic length 119887 and frequency 120596
119899=
radic11989611990411198991198721199041 such that
119905 = 120596119899119905 (6)
Hence a set of simplified equations of motions of thetransmission system is obtained by substituting (5a)ndash(5g) and(6) into (4a)ndash(4h)
1199041119901ℎ119899
+1
1205962119899
3
sum119894=1
[11986211990411198991199041119901ℎ119894
11987211990411198881
+11986211990311198991199031119901ℎ119894
1198721198881
]
+1
1205962119899
[11986211990411198991199041119901ℎ119899
minus 11986211990311198991199031119901ℎ119899
119872119901ℎ
minus1198621198881119904211988811199042
1198721198881
]
+1
1205962119899
3
sum119894=1
[
[
1198961199041119899119892 (1198801199041119901ℎ119894
)
11987211990411198881
+1198961199031119899119892 (1198801199031119901ℎ119894
)
1198721198881
]
]
+1
1205962119899
[
[
1198961199041119899119892 (1198801199041119901ℎ119899
) minus 1198961199031119899119892 (1198801199031119901ℎ119899
)
119872119901ℎ
minus11989611988811199042119892 (11988011988811199042)
1198721198881
]
]
=119879in
119903119904111987211990411198871205962119899
(119899 = 1 2 3)
(7a)
Mathematical Problems in Engineering 5
1199031119901ℎ119899
+1
1205962119899
[11986211990311198991199031119901ℎ119899
minus 11986211990411198991199041119901ℎ119899
119872119901ℎ
minus1198621198881119904211988811199042
1198721198881
minus1198621199031119903211990311199032
1198721199031
]
+1
1205962119899
3
sum119894=1
[11986211990411198991199041119901ℎ119894
1198721198881
+11986211990311198991199031119901ℎ119894
11987211988811199031
]
+1
1205962119899
3
sum119894=1
[
[
1198961199041119899119892 (1198801199041119901ℎ119894
)
1198721198881
+1198961199031119899119892 (1198801199031119901ℎ119894
)
11987211988811199031
]
]
+1
1205962119899
[
[
1198961199031119899119892 (1198801199031119901ℎ119899
) minus 1198961199041119899119892 (1198801199041119901ℎ119899
)
119872119901ℎ
minus11989611988811199042119892 (11988011988811199042)
1198721198881
minus11989611990311199032119892 (11988011990311199032)
1198721199031
]
]
= 0
(119899 = 1 2 3)
(7b)
11988811199042+11986211988811199042
11987211988811205962119899
11988811199042
minus1
1205962119899
3
sum119894=1
[11986211990411198991199041119901ℎ119894
+ 11986211990311198991199031119901ℎ119894
1198721198881
+119862119904211989911990421199011198971198941199031198881cos120572
11987211990421199031199042
]
+11986211988811199042
11987211990421205962119899
(1199031198881cos1205721199031199042
)
2
11988811199042+11989611988811199042119892 (11988011988811199042)
11987211988811205962119899
+11989611988811199042119892 (11988011988811199042)
11987211990421205962119899
(1199031198881cos1205721199031199042
)
2
minus1
1205962119899
3
sum119894=1
[
[
1198961199041119899119892 (1198801199041119901ℎ119894
) + 1198961199031119899119892(1198801199031119901ℎ119894
)
1198721198881
+1198961199042119899119892 (1198801199042119901119897119894) 1199031198881cos120572
11987211990421199031199042
]
]
= 0
(7c)
1198882+11986211988821198882
11987211988821205962119899
minus
3
sum119894=1
11986211990421198991199042119901119897119894
+ 11986211990321198991199032119901119897119894
11987211988821205962119899
+1198961198882119892 (1198801198882)
11987211988821205962119899
minus
3
sum119894=1
1198961199042119899119892 (1198801199042119901119897119894) + 1198961199032119899119892 (1198801199032119901119897119894)
11987211988821205962119899
= 0
(7d)
1199042119901119897119899
+1
1205962119899
3
sum119894=1
[11986211990421198991199042119901119897119894
1198721199042
+11986211990421198991199042119901119897119894
+ 11986211990321198991199032119901119897119894
1198721198882
]
+1
1205962119899
[11986211990421198991199042119901119897119899
minus 11986211990321198991199032119901119897119899
119872119901119897
minus11986211988821198882
1198721198882
minus11986211988811199042
1198721199042
1199031198881cos120572
11988811199042
1199031199042
]
+1
1205962119899
3
sum119894=1
[
[
1198961199042119899119892 (1198801199042119901119897119894)
1198721199042
+1198961199042119899119892 (1198801199042119901119897119894) + 1198961199032119899119892 (1198801199032119901119897119894)
1198721198882
]
]
+1
1205962119899
[
[
1198961199042119899119892 (1198801199042119901119897119899
) minus 1198961199032119899119892 (1198801199032119901119897119899
)
119872119901119897
minus1198961198882119892 (1198801198882)
1198721198882
minus11989611988811199042
1198721199042
times119892 (11988011988811199042) 1199031198881cos120572
1199031199042
]
]
= 0 (119899 = 1 2 3)
(7e)
1199032119901119897119899
+1
1205962119899
[11986211990321198991199032119901119897119899
minus 11986211990421198991199042119901119897119899
119872119901119897
minus11986211988821198882
1198721198882
+11986211990311199032119903119903111990311199032
11987211990321199031199032
]
+1
1205962119899
3
sum119894=1
[11986211990421198991199042119901119897119894
+ 11986211990321198991199032119901119897119894
1198721198882
+11986211990321198991199032119901119897119899
1198721199032
]
+1
1205962119899
[
[
1198961199032119899119892 (1198801199032119901119897119899
)minus1198961199042119899119892 (1198801199042119901119897119899
)
119872119901119897
minus1198961198882119892 (1198801198882)
1198721198882
+119896119903111990321199031199031119892 (11988011990311199032)
11987211990321199031199032
]
]
6 Mathematical Problems in Engineering
+1
1205962119899
3
sum119894=1
[
[
1198961199042119899119892 (1198801199042119901119897119894)+1198961199032119899119892 (1198801199032119901119897119894)
1198721198882
+1198961199032119899119892 (1198801199032119901119897119894)
1198721199032
]
]
=minus119879out
119872119903211990311990321198871205962119899
(119899 = 1 2 3)
(7f)
11990311199032+1198621199031119903211990311199032
119872119903111990321205962119899
+1
1205962119899
3
sum119894=1
(11986211990321198991199031199031
11987211990321199031199032
1199032119901119897119894
minus1198621199031119899
1198721199031
1199031119901ℎ119894
)
+11989611990311199032119892 (11988011990311199032)
119872119903111990321205962119899
+1
1205962119899
3
sum119894=1
(11989611990321198991199031199031119892 (1198801199032119901119897119894)
11987211990321199031199032
minus1198961199031119899119892 (1198801199031119901ℎ119894
)
1198721199031
)
= minus119879out1199031199031
1198721199032119903211990321198871205962119899
(7g)
where1
11987211990411198881
=1
1198721199041
+1
1198721198881
1
11987211988811199031
=1
1198721198881
+1
1198721199031
1
11987211990311199032
=1
1198721199031
+1199031199031
11987211990321199031199032
(8)
Equations (7a)ndash(7g) can be written in matrix form as
U + CU + K119892 (U) = T (9)
where the piecewise-linear backlash function is defined as
119892 [119880119894119895(119905)] =
119880119894119895(119905) minus 119887
119894119895 119880119894119895gt 119887119894119895
0 minus119887119894119895le 119880119894119895le 119887119894119895
119880119894119895(119905) + 119887
119894119895 119880119894119895lt minus119887119894119895
(10)
3 Solution of Dynamic Equations
31 Dynamic Response Using the Numerical IntegrationIn this section the mathematical model will be solvednumerically by the variable step-size Runge-Kutta integrationmethod firstly The parameters of the closed-form planetarygear set shown in Figure 1 are given in Tables 1 and 2 In thiswork the values of the gearmesh damping coefficients119862
119894119895are
assumed to be constants as 001 [11]By resolving the dynamic differential equations of
motions the dynamic responses (displacement and speed) oflow-stage carrier are gained as shown in Figure 3
32The Acquisition of Analytical Solutions In order to estab-lish the optimization mathematical model of the dynamicbehavior of the closed-form planetary gear set it is necessaryto obtain the analytical solutions ofmodel using the harmonicbalancemethod For limiting the number of algebraic balanceequations only the fundamental frequency harmonic of themesh stiffness functions are considered in this case Similarlyexternal torque functions is also considered to be in the formof mesh stiffness functions And then attention is paid to theperiodic vibrations of system under the harmonic excitationThe procedure of solving (7a)ndash(7g) using HBM [5] includessome aspects as follows(1) According to the assumption previously mentioned
the external excitations that represent fundamental frequencypulsations can be written in the form
T = T119898119894+ T119886119894cos (Ω119905 + 120601
119894) (11)
where T119898119894
is the mean component of torque and T119886119894is the
amplitude of the alternating component of the fundamentalfrequency mesh force 120601
119894is the phase angle
(2) According to the harmonic excitations given in(11) the harmonic balance method solution to (7a)ndash(7g) isassumed in the same form
U = U119898119894+ U119886119894cos (Ω119905 + 120601
119894) (12)
whereU119898119894
andU119886119894are the mean and alternating components
of the steady state response respectively and 120601119894is the phase
angle(3) For relative mesh displacements the piecewise-linear
function in (4a)ndash(4h) can be written in a unified form
119892 (119880119894) = 119873
119898119894119880119898119894+ 119873119886119894119880119886119894cos (Ω119905 + 120601
119894) (13)
where
119873119898119894= 1 +
119902119886119894
2119902119898119894
[119866 (120583+) minus 119866 (120583
minus)]
119873119886119894= 1 minus
1
2[119867 (120583
+) minus 119867 (120583
minus)]
(14)
The expressions of 119866 and119867 are given in the Appendix(4) Considering the mean value and the fundamental
harmonic value of periodically time-varying mesh stiffnessin Figure 2 the elements of stiffness matrix K in (9) can bewritten as
119896119894119895= 119896119898119894119895+ 119896119886119894119895
cos (Ω120591 + 120593119894119895) (15)
So the stiffness matrix K is written in terms of two separatematrices for mean stiffness and alternating stiffness as
K = K119898+ ΔK (16)
where
K119898= [119896119898119894119895]119899times119899
ΔK = [119896119886119894119895
cos (Ω120591 + 120593119894119895)]119899times119899
(17)
Mathematical Problems in Engineering 7
Table 1 Geometric parameters of the closed-form planetary gear set
High-speed stage Low-speed stageSun gear Planet gear Ring gear Sun gear Planet gear Ring gear
Number of teeth 16 38 92 16 24 62Module (mm) 3 3Pressure angle (deg) 215∘ 215∘
Modification coefficient 03 012 054 0475 0471 0309Face width (mm) 22 20 20 345 30 32
Table 2 Physical parameters of the closed-form planetary gear set
High-speed stage Low-speed stageSun Planet Ring Carrier Sun Planet Ring Carrier
Inertia (kgsdotmm2) 8854 827 6888372 680079 33959 46292 11021396 94009Rotation radius (mm) 1107 3278 113 5725 2328 3112 113 28Mean mesh stiffness (Nmm) 119870
1199041119899= 1198701199031119899= 21198907 119870
1199042119899= 1198701199032119899= 21198907
Torsional stiffness (Nmm) 11987011988811199042= 21198907 119870
11990311199032= 101198907 119870
1198882= 101198908
Total mass 69 kg
By substituting (9)ndash(14) into (7a)ndash(7g) and balancing the likeharmonic terms the algebraic equations of system can begained
K119898y119898+K1y3
2+K2y4
2minus T119898= 0119899times1
K119898y3+ K1y119898minus Ω2y1minus ΩCy
2minus T1= 0119899times1
K119898y4+ K2y119898minus Ω2y2+ CΩy
1minus T2= 0119899times1
(18)
where y1= 119902
119886119894cos120593119894119899times1
y2= 119902
119886119894sin120593119894119899times1
y3=
119873119886119894119902119886119894cos120593119894119899times1
y4= 119873119886119894119902119886119894sin120593119894119899times1
y119898= 119873119898119894119902119898119894119899times1
T1
= 119879119886119894cos120601119894119899times1
T2
= 119879119886119894sin120601119894119899times1
K1
=
119896119886119894119895
cos120601119894119895119899times1
and K2= 119896119886119894119895
sin120601119894119895119899times1
The matrices k
119898and C are given in the Appendix
4 Optimization of the Transmission System
41 Variables and Objective Function of Optimization Anumber of key design parameters have great influence onthe dynamic characteristics of the gear transmissions sothey can be chosen as design variables such as numberof each gear module gear width and pressure angle Tosimplify optimization process the module of each stage 119898
1
1198982 number of sun gears of each stage 119911
1199041 1199111199042 and pressure
angle of each stage1205721 1205722are chosen as optimization variables
in this study So the recurrence variables vector for thisoptimization procedure can be written as
119909 = [1198981 1198982 1199111199041 1199111199042 1205721 1205722]119879
(19)
The dynamic characteristics standards of the gear trans-mission include maximum dynamic loads dynamic loadfactor stiffness and displacementvelocityacceleration ofvibration each of these standards can be chosen as opti-mization objective Considering that the rotation centerof the planets in low-stage is unfixed and reducing the
total weight of the transmission system simultaneously thedisplacement of rotational vibration of the low-stage carrierand total mass of the gear set are chosen as optimizationobjective According to the basic idea of the multiobjectiveoptimization two optimization objective functions unifiedusing the normalized weighting method [11] can be writtenin form
119891 = 12058211198911+ 12058221198912 (20)
where 1205821and 120582
2are weighting coefficient here 120582
1= 03
and 1205822= 07 [12] 119891
1and 119891
2are the ampler of the rotational
vibration displacement of the low-stage carrier and totalmass of the gear set respectively Due to limited space theexpressions of 119891
1and 119891
2are not given in detail
42 Constraints
(1) Distributing the number of teeth of each gear con-centric conditions adjacent conditions and assemblyconditions
(2) contact fatigue strength and bending fatigue strengthconstraints
119878119867(119894) ge 119878
119867min 119878119865(119894) ge 119878
119865min
119894 = 1199041 1199042 1199031 1199032 119901ℎ 119901119897
(21)
(3) contact ratio constraints
120576119894119895ge 15 119894 = 119904
1 1199042 1199031 1199032 119895 = 119901ℎ 119901119897 (22)
(4) transmission ratio without loop-power conditions
minus32 le 1198941+ 1198942minus 11989411198942le minus30
0 lt1198942minus 11989411198942
1198941+ 1198942minus 11989411198942
lt 1(23)
8 Mathematical Problems in Engineering
Table 3 Parameters of structure after optimization
High-speed stage Low-speed stageSun gear Planet gear Ring gear Sun gear Planet gear Ring gear
Number of teeth 17 40 97 18 23 66Module (mm) 2 3Pressure angle (deg) 20∘ 20∘
Total mass (kg) 635 kg
0 5 10 15 20 25minus5
minus4
minus3
minus2
minus1
0
1
2
3 Displacement of low-stage carrier
Time (s)
Non
dim
ensio
nal d
ispla
cem
ent
(a) Displacement of low-speed stage carrier
0 5 10 15 20 25minus15
minus1
minus05
0
05
1
15
Time (s)
Non
dim
ensio
nal s
peed
Speed of low-stage carrier
(b) Speed of low-speed stage carrier
Figure 3 Response of low-speed stage carrier without optimization
0 5 10 15 20 25minus5
minus4
minus3
minus2
minus1
0
1
2
3Displacement of low-stage carrier
Time (s)
Non
dim
ensio
nal d
ispla
cem
ent
(a) Displacement of low-speed stage carrier
0 5 10 15 20 25minus15
minus1
minus05
0
05
1
15
Time (s)
Non
dim
ensio
nal s
peed
Speed of low-stage carrier
(b) Speed of low-speed stage carrier
Figure 4 Response of low-speed stage carrier after optimization
where
119894119899= minus119885119903119899
119885119904119899
119899 = 1 2 (24)
(5) minimum tooth thickness constraints
119878119886119894ge 04119898
119895 119894 = 119904
1 1199042 1199031 1199032 119901ℎ 119901119897 119895 = 1 2 (25)
5 Results and Discussions
Some more logical parameters of the closed-form planetarygear set are obtained according to optimization constraintsconditions previously mentioned119898
1= 2 119898
2= 3 119885
1199041= 17
1198851199042= 18 120572
1= 1205722= 20∘ Further other parameters of
transmission can be computed as shown in Table 3 Total
Mathematical Problems in Engineering 9
mass of gear set is 635 kg Comparing the results betweenbefore and after the optimization it is clear that transmissionsystem reduces the total mass of 86 and the dynamiccharacteristic significantly improves as well It is also evidentfrom the comparison of Figure 3 with Figure 4 that thedisplacement of each structure significantly reduces at thesame time It is obvious that the scope of the amplitude ofdisplacement of low-stage carrier is minus3 to 3 in Figure 4(a)while that in Figure 3(a) is minus5 to 3
6 Conclusions
Considering the gear backlash time-varying mesh stiffnessand excitation fluctuation and so forth a discrete nonlineardynamic model of a two stages closed-form planetary set wasproposed in this study In order to facilitate the analysis andcomparison of system response between before and after opti-mization nonlinear differential equations of motion of thedynamic model were solved using a Runge-Kutta numericalintegrationmethod For optimization of transmission systemthe analytical solutions were obtainedThe total optimizationobjective function is obtained using the normalized weightsmethod
A case shows that the total mass of transmission systemhas significantly reduced and dynamic characteristic has dis-tinctly improved Effectiveness of the dynamicmodel and thedynamic optimization mathematic model is demonstrated
Appendix
Consider the following
119866 (120583) =
(2
120587)(120583 sinminus1120583 + radic1 minus 1205832) 1003816100381610038161003816120583
1003816100381610038161003816 le 1
10038161003816100381610038161205831003816100381610038161003816
10038161003816100381610038161205831003816100381610038161003816 gt 1
119867 (120583) =
minus1 120583 lt minus1
(2120583
120587)(sinminus1120583 + radic1 minus 1205832) 1003816100381610038161003816120583
1003816100381610038161003816 le 1
1 120583 gt 1
(A1)
The elements of the stiffness matrix k119898are given as follows
119896 (1 1) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
+1
119872119901ℎ
)
119896 (1 119894) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
) 119894 = 2 3
119896 (1 4) =1198961199031119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (1 119894) =1198961199031119899
11987211988811205962119899
119894 = 5 6
119896 (1 7) = minus11989611988811199042
11987211988811205962119899
119896 (2 119894) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
) 119894 = 1 3
119896 (2 7) = minus11989611988811199042
11987211988811205962119899
119896 (2 2) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
+1
119872119901ℎ
)
119896 (2 119894) =1198961199031119899
11987211988811205962119899
119894 = 4 6
119896 (2 5) =1198961199031119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (2 119894) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
) 119894 = 1 3
119896 (2 2) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
+1
119872119901ℎ
)
119896 (2 119894) =1198961199031119899
11987211988811205962119899
119894 = 4 6
119896 (2 5) =1198961199031119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (2 7) = minus11989611988811199042
11987211988811205962119899
119896 (3 119894) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
) 119894 = 1 2
119896 (3 3) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
+1
119872119901ℎ
)
119896 (3 119894) =1198961199031119899
11987211988811205962119899
119894 = 4 5
119896 (3 6) =1198961199031119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (3 7) = minus11989611988811199042
11987211988811205962119899
119896 (4 1) =1198961199041119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (4 119894) =1198961199041119899
11987211988811205962119899
119894 = 2 3
119896 (4 7) = minus11989611988811199042
11987211988811205962119899
119896 (4 4) =1198961199031119899
1205962119899
(1
119872119901ℎ
+1
1198721198881
+1
1198721199031
)
10 Mathematical Problems in Engineering
119896 (4 119894) =1198961199031119899
1205962119899
(1
1198721198881
+1
1198721199031
) 119894 = 5 6
119896 (4 15) = minus11989611990311199032
11987211990311205962119899
119896 (5 119894) =1198961199041119899
11987211988811205962119899
119894 = 1 3
119896 (5 2) =1198961199041119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (5 119894) =1198961199031119899
1205962119899
(1
1198721198881
+1
1198721199031
) 119894 = 5 6
119896 (5 5) =1198961199031119899
1205962119899
(1
119872119901ℎ
+1
1198721198881
+1
1198721199031
)
119896 (5 7) = minus11989611988811199042
11987211988811205962119899
119896 (5 15) = minus11989611990311199032
11987211990311205962119899
119896 (6 119894) =1198961199041119899
11987211988811205962119899
119894 = 1 2
119896 (6 3) =1198961199041119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (6 119894) =1198961199031119899
1205962119899
(1
1198721198881
+1
1198721199031
) 119894 = 4 5
119896 (6 6) =1198961199031119899
1205962119899
(1
119872119901ℎ
+1
1198721198881
+1
1198721199031
)
119896 (6 7) = minus11989611988811199042
11987211988811205962119899
119896 (6 15) = minus11989611990311199032
11987211990311205962119899
119896 (7 119894) = minus1198961199041119899
11987211988811205962119899
119894 = 1 2 3
119896 (7 119894) = minus1198961199031119899
11987211988811205962119899
119894 = 4 5 6
119896 (7 7) =11989611988811199042
1205962119899
[1
1198721198881
+1
1198721199042
(1199031198881cos1205721199031199042
)
2
]
119896 (7 119894) = minus1198961199042119899
11987211990421205962119899
1199031198881cos1205721199031199042
119894 = 9 10 11
119896 (8 8) =1198961198882
11987211988821205962119899
119896 (8 119894) = minus1198961199042119899
11987211988821205962119899
119894 = 9 10 11
119896 (8 119894) = minus1198961199032119899
11987211988821205962119899
119894 = 12 13 14
119896 (9 7) = minus11989611988811199042
11987211990421205962119899
1199031198881cos1205721199031199042
119896 (9 8) = minus1198961198882
11987211988821205962119899
119896 (9 9) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
+1
119872119901119897
)
119896 (9 119894) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
) 119894 = 10 11
119896 (9 12) =1198961199032119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (9 119894) =1198961199032119899
11987211988821205962119899
119894 = 13 14
119896 (10 7) = minus11989611988811199042
11987211990421205962119899
1199031198881cos1205721199031199042
119896 (10 8) = minus1198961198882
11987211988821205962119899
119896 (10 119894) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
) 119894 = 9 10
119896 (10 10) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
+1
119872119901119897
)
119896 (10 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 14
119896 (10 13) =1198961199032119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (11 7) = minus11989611988811199042
11987211990421205962119899
1199031198881cos1205721199031199042
119896 (11 8) = minus1198961198882
11987211988821205962119899
119896 (11 119894) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
) 119894 = 9 10
119896 (11 11) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
+1
119872119901119897
)
119896 (11 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 13
119896 (11 14) =1198961199032119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (12 8) = minus1198961198882
11987211988821205962119899
Mathematical Problems in Engineering 11
119896 (12 15) =119896119903111990321199031199031
119872119903212059621198991199031199032
119896 (12 9) =1198961199042119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (12 119894) =1198961199042119899
11987211988821205962119899
119894 = 10 11
119896 (12 12) =1198961199032119899
1205962119899
(1
119872119901119897
+1
1198721198882
)
119896 (12 119894) =1198961199032119899
11987211988821205962119899
119894 = 13 14
119896 (13 8) = minus1198961198882
11987211988821205962119899
119896 (13 10) =1198961199042119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (13 119894) =1198961199042119899
11987211988821205962119899
119894 = 9 11
119896 (13 13) =1198961199032119899
1205962119899
(1
119872119901119897
+1
1198721198882
)
119896 (13 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 14
119896 (13 15) =119896119903111990321199031199031
119872119903212059621198991199031199032
119896 (14 8) = minus1198961198882
11987211988821205962119899
119896 (14 11) =1198961199042119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (14 119894) =1198961199042119899
11987211988821205962119899
119894 = 9 10
119896 (14 14) =1198961199032119899
1205962119899
(1
119872119901119897
+1
1198721198882
)
119896 (14 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 13
119896 (14 15) =119896119903111990321199031199031
119872119903212059621198991199031199032
119896 (15 119894) = minus1198961199031119899
11987211990311205962119899
119894 = 4 5 6
119896 (15 119894) =11989611990321198991199031199031
119872119903211990311990321205962119899
119894 = 12 13 14
119896 (15 15) =11989611990311199032
1205962119899
(1
1198721199031
+1199031199031
11987211990321199031199032
)
(A2)
The elements of k119898not listed previously are taken as zeros
The matrix C is in the similar form of k119898and no longer is
listed in detail here
Notations
HBM Harmonic balance method119887 Half of clearance (backlash)119896 Gear mesh stiffness119903 Ring gear119892 Discontinuous displacement function119868 Polar mass moment of inertia119894 Transmission ratio119888 Carrier119898 Actual mass119905 Dimensional time119906 Actual equivalent transverse displacement in
the direction of pressure line119880 Relative equivalent transverse displacement
in the direction of pressure line119904 Sun gear119899119901 Number of planet
T Torque120579 Angular displacement119862 Damping coefficient119885 Number of gear119903 Base cycle radius119872 Equivalent mass119905 Nondimensional time120572 Pressure angle
Acknowledgments
Thiswork is supported by theNational Natural Science Foun-dation of China (no 51175299) Shandong Province NaturalScience Foundation of China (ZR2010EM012) and ShandongUniversity Independent Innovation Foundation ofChina (no2012TS048)
References
[1] F Cunliffe J D Smith and D B Welbourn ldquoDynamic toothloads in epicyclic gearsrdquo Transactions of the ASME Journal ofEngineering for Industry vol 96 no 2 pp 578ndash584 1974
[2] M Botman ldquoEpicyclic gear vibrationsrdquo Transactions of theASME Journal of Engineering for Industry vol 98 no 3 pp 811ndash815 1976
[3] G Antony ldquoGear vibration-investigation of the dynamic behav-ior of one stage epicyclic gearsrdquo AGMA Technical Paper 88-FTM-12 1988
[4] A Kahraman ldquoFree torsional vibration characteristics of com-pound planetary gear setsrdquo Mechanism and Machine Theoryvol 36 no 8 pp 953ndash971 2001
[5] T Sun and H Hu ldquoNonlinear dynamics of a planetary gearsystem with multiple clearancesrdquo Mechanism and MachineTheory vol 38 no 12 pp 1371ndash1390 2003
[6] A Al-shyyab and A Kahraman ldquoA non-linear dynamic modelfor planetary gear setsrdquo Proceedings of the Institution ofMechan-ical Engineers K Journal of Multi-body Dynamics vol 221 no 4pp 567ndash576 2007
12 Mathematical Problems in Engineering
[7] A Al-Shyyab K Alwidyan A Jawarneh and H Tlilan ldquoNon-linear dynamic behaviour of compound planetary gear trainsmodel formulation and semi-analytical solutionrdquo Proceedings ofthe Institution of Mechanical Engineers K Journal of Multi-bodyDynamics vol 223 no 3 pp 199ndash210 2009
[8] T Zeng Bao Z Yi Fang and L Wei Zhong ldquoMany stage helicalgear train systemoptimal designwhich takes the dynamic prop-erties as an objective functionrdquo Chinese Journal of MechanicalEngineering vol 30 no 5 pp 66ndash75 1994 (Chinese)
[9] X Guan Wei Y Jia Jun X LaiYuan et al ldquoDynamic optimaldesign on planetary driverrdquoMechanical Science and Technologyvol 17 no 2 pp 209ndash217 1998 (Chinese)
[10] G W Blankenship and A Kahraman ldquoSteady state forcedresponse of a mechanical oscillator with combined parametricexcitation and clearance type non-linearityrdquo Journal of Soundand Vibration vol 185 no 5 pp 743ndash765 1995
[11] HGuang andWGuiCheng ldquoDynamics optimization design ofclosed epicyclic gear trainsrdquoMechanical Science and Technologyvol 23 no 9 pp 1131ndash1134 2004 (Chinese)
[12] D-T Qin X-G Gu J-H Wang and J-G Liu ldquoDynamicanalysis and optimization of gear trains in amegawatt level windturbinerdquo Journal of Chongqing University vol 32 no 4 pp 408ndash414 2009 (Chinese)
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
(1) All of the gears in the set are assumed to be rigid andthe flexibilities of each gear teeth at the gear meshinterface are modeled by an equivalent spring havingtime-varying stiffness acting along the mesh direc-tions These periodically time-varying mesh stiff-nesses are subject to piece-linear functions represent-ing gear backlashes
(2) Because the bending stiffness of shafts in the set isvery large the deflection of these shafts can be ne-glected Thus the transverse displacements of gearsare not considered
(3) Because the damping mechanisms at the gear meshesand bearings of a planetary gear set are not easy to givea description of mathematical model viscous gearmesh damping elements are introduced to representenergy dissipation of the transmission system
22 Equivalent Displacements In order to establish the equa-tions of motion easily all of torsional angular displacementsare unified on the pressure line in terms of equivalentdisplacements The equivalent transverse displacements inthe mesh line direction caused by rotational displacementsare written as follows
119906119888119895= 119903119888119895120579119888119895 119906119903119895= 119903119903119895120579119903119895 119906119904119895= 119903119904119895120579119904119895 119906119901119895119899= 119903119901119895120579119895119899
119895 = 1 2 119899 = 1 2 3
(1)
where 120579 and 119903 (subscripts 119888119895 119903119895 119904119895 119895119899 119895 = ℎ 119897 119899 = 1 2 3)are angular displacements and base circle radius of the partsrespectively While 119903 (subscripts 1198881 1198882) is the equivalent basecircle radius of the carriers defined as follows
1199031199041+ 119903119901ℎ= 1199031199031minus 119903119901ℎ= 1199031198881cos120572
1199031199042+ 119903119901119897= 1199031199032minus 119903119901119897= 1199031198882cos120572
(2)
With the symbol 119880 is used to represent the relativedisplacements in the direction of pressure line the relativedisplacements are obtained according to themeshing relationand the equivalent displacements as follows The positivedirection of the relative displacements is assumed to be thesame direction of the compressive deformation The relativedisplacements of the parts in the pressure line direction arewritten as follows
1198801199041119901ℎ119894
= 1199031199041(1205791199041minus 1205791198881) minus 119903119901ℎ(120579ℎ119894+ 1205791198881)
= 11990311990411205791199041minus 11990311988811205791198881cos120572 minus 119903
119901ℎ120579ℎ119894
(3a)
1198801199031119901ℎ119894
= 119903119901ℎ(120579ℎ119894+ 1205791198881) minus 1199031199031(1205791199031+ 1205791198881)
= 119903119901ℎ120579ℎ119894minus 11990311988811205791198881cos120572 minus 119903
11990311205791199031
(3b)
11988011988811199042= 1199031198881(1205791198881minus 1205791199042) cos120572 (3c)
1198801198882= 11990311988821205791198882cos120572 (3d)
1198801199042119901119897119894
= 1199031199042(1205791199042minus 1205791198882) minus 119903119901119897(120579119897119894+ 1205791198882)
= 11990311990421205791199042minus 11990311988821205791198882cos120572 minus 119903
119901119897120579119897119894
(3e)
1198801199032119901119897119894
= 119903119901119897(120579119897119894+ 1205791198882) minus 1199031199032(1205791199032+ 1205791198882)
= 119903119901119897120579119897119894minus 11990311988821205791198882cos120572 minus 119903
11990321205791199032
(3f)
11988011990311199032
= 1199031199031(1205791199031minus 1205791199032) (3g)
23 Equations of Motion The closed-form planetary gearsystem consists of four different kinds of gear pairs theexternal gear pair that is the sun gearplanet gear-119894 pair(subscripts 1199041 119901ℎ119894 and 1199042 119901119897119894) and the internal gear pairthat is the ring gearplanet gear-119894 pair (subscripts 1199031 119901ℎ119894and 1199032 119901119897119894) The mesh of gear 119895 (119904119894 or 119903119894 119894 = 1 2) with aplanet 119901119894 (119894 = ℎ 119897) is represented by a periodically time-varying stiffness element 119896
119895119901119894(119905) subjected to a piecewise
linear backlash function 119892 that includes a clearance of gapwidth 2119887
119895119901119894 Accordingly the dynamicmodel of a closed-form
gear set with 119899 planets includes 2119899 clearances In this closed-form planetary gear system damper is described by constantviscous damper coefficient 119888
119895119901119894 This is a rather simplified
mesh contact model in reality these contacts are subjected tothe hydro-elastic-dynamic regime of lubrication [10] In thispaper it is supposed that all planets 119901119894 (119894 = ℎ 119897) and theirrespective meshes with gear 119895 (1199041 1199042 or 1199031 1199032) are identicalso that 119896
119895119901119894(119905) 119887119895119901119894 and 119888
119895119901119894are the same for each 119895119901119894 mesh
except the phase angles of 119896119895119901119894(119905) which differ according to
planet phasing conditionsThus the nonlinear dynamic differential equations of
motion of closed-form planetary gear set can be establishedusing the Lagrange principle as follows
11987211988811198881+ 1198621198881119904211988811199042
minus
3
sum119894=1
(11986211990411198991199041119901ℎ119894
+ 11986211990311198991199031119901ℎ119894
) + 1198961198881119904211988011988811199042
minus
3
sum119894=1
[11989611990411198991198801199041119901ℎ119894
+ 11989611990311198991198801199031119901ℎ119894
] = 0
(4a)
11987211990311199031+ 1198621199031119903211990311199032
minus
3
sum119894=1
11986211990311198991199031119901ℎ119894
+ 1198961199031119903211988011990311199032
minus
3
sum119894=1
11989611990311198991198801199031119901ℎ119894
= 0
(4b)
11987211990411199041+
3
sum119894=1
11986211990411198991199041119901ℎ119894
+
3
sum119894=1
11989611990411198991198801199041119901ℎ119894
=119879in1199031199041
(4c)
119872119901ℎℎ119899minus 11986211990411198991199041119901ℎ119899
+ 11986211990311198991199031119901ℎ119899
minus 11989611990411198991198801199041119901ℎ119899
+ 11989611990311198991198801199031119901ℎ119899
= 0 (119899 = 1 2 3)
(4d)
4 Mathematical Problems in Engineering
11987211988821198882+ 11986211988821198882
minus
3
sum119894=1
(11986211990421198991199042119901119897119894
+ 11986211990321198991199032119901119897119894) + 11989611988821198801198882
minus
3
sum119894=1
[11989611990421198991198801199042119901119897119894
+ 11989611990321198991198801199032119901119897119894] = 0
(4e)
11987211990321199032minus 1198621199031119903211990311199032
1199031199031
1199031199032
minus
3
sum119894=1
11986211990321198991199032119901119897119894
minus 1198961199031119903211988011990311199032
1199031199031
1199031199032
minus
3
sum119894=1
11989611990321198991198801199032119901119897119894
=119879out1199031199032
(4f)
11987211990421199042minus 1198621198881119904211988811199042
1199031198881cos1205721199031199042
+
3
sum119894=1
11986211990421198991199042119901119897119894
minus 1198961198881119904211988011988811199042
1199031198881cos1205721199031199042
+
3
sum119894=1
11989611990421198991198801199042119901119897119894
= 0
(4g)
119872119901119897119897119899minus 11986211990421198991199042119901119897119899
+ 11986211990321198991199032119901119897119899
minus 11989611990421198991198801199042119901119897119899
+ 11989611990321198991198801199032119901119897119899
= 0 (119899 = 1 2 3) (4h)
where 1198681198881= 11986810158401198881+ 3119898119901ℎ11990321198881
is the equivalent mass momentof inertia of the carrier including planet gears in high-speedstage 1198681015840
1198881is the inertia of the carrier in high-speed stage
119898119901ℎ
is the actual mass of planet-gear in high-speed stageand 1199031198881
is the distribution circle radius of the planet gears1198681198881= 119872119888111990321198871198881
1198721198881
is the equivalent mass of the carrier inhigh-speed stage with respect to the its equivalent base circleradius 119903
1198871198881is equivalent base circle radius of the carrier in
high-speed stage 1199031198871198881= 1199031198881cos120572 119868
1199031= 119872119903111990321199031 and119872
1199031is the
equivalent mass of the ring in low-speed stage with respect toits base circle radius 119868
1199041= 119872119904111990321199041 and119872
1199041is the equivalent
mass of the sun gear in low-speed stage with respect to itsbase circle radius 119868
119901ℎ119899= 119872119901ℎ1199032119901ℎ and119872
119901ℎis the equivalent
mass of the planet-gear in high-speed stage with respect to itsequivalent base circle radius 119868
1198882= 1198681015840
1198882+31198981199011198971199032
1198882 and 1198681015840
1198882is the
moment of inertia of the carrier in low-speed stageDynamic model of motion of transmission has consider-
able difficulties in its solution procedure as follows (1) As asemidefinite system its first-order natural frequency is zerocorresponding to a rigid body motion (2) The piecewise-linear function 119892 represents the gear backlash and thenumber of variables is even different according to the externaland internal gear pairs (3) As both linear and nonlinearrestoring forces exist in the equations it is not possibleto write out the governing equation in matrix form whilea general solution technique applicable to the systems ofmultiple degrees of freedom must be based on matrix form
Therefore (4a)ndash(4h) are simplified further by introducinga set of new variables
1198801199041119901ℎ119899
= 1199061199041minus 1199061198881minus 119906ℎ119899 (5a)
1198801199031119901ℎ119899
= 119906ℎ119899minus 1199061198881minus 1199061199031 (5b)
11988011988811199042= 1199061198881minus1199031198881cos1205721199031199042
1199061199042 (5c)
1198801198882= 1199061198882 (5d)
1198801199042119901ℎ119899
= 1199061199042minus 1199061198882minus 119906119897119899 (5e)
1198801199032119901ℎ119899
= 119906119897119899minus 1199061198882minus 1199061199032 (5f)
11988011990311199032
= 1199061199031minus1199031199031
1199031199032
1199061199032 (5g)
The new coordinate variables defined previously not onlyhave intuitional physicalmeaning but also eliminate the rigidbody motion Furthermore the piecewise-linear backlashfunction 119892 can be written as a set of functions with a singlevariable according to (5a)ndash(5g)
In addition nondimensional parameters of (4a)ndash(4h) canbe obtained by a characteristic length 119887 and frequency 120596
119899=
radic11989611990411198991198721199041 such that
119905 = 120596119899119905 (6)
Hence a set of simplified equations of motions of thetransmission system is obtained by substituting (5a)ndash(5g) and(6) into (4a)ndash(4h)
1199041119901ℎ119899
+1
1205962119899
3
sum119894=1
[11986211990411198991199041119901ℎ119894
11987211990411198881
+11986211990311198991199031119901ℎ119894
1198721198881
]
+1
1205962119899
[11986211990411198991199041119901ℎ119899
minus 11986211990311198991199031119901ℎ119899
119872119901ℎ
minus1198621198881119904211988811199042
1198721198881
]
+1
1205962119899
3
sum119894=1
[
[
1198961199041119899119892 (1198801199041119901ℎ119894
)
11987211990411198881
+1198961199031119899119892 (1198801199031119901ℎ119894
)
1198721198881
]
]
+1
1205962119899
[
[
1198961199041119899119892 (1198801199041119901ℎ119899
) minus 1198961199031119899119892 (1198801199031119901ℎ119899
)
119872119901ℎ
minus11989611988811199042119892 (11988011988811199042)
1198721198881
]
]
=119879in
119903119904111987211990411198871205962119899
(119899 = 1 2 3)
(7a)
Mathematical Problems in Engineering 5
1199031119901ℎ119899
+1
1205962119899
[11986211990311198991199031119901ℎ119899
minus 11986211990411198991199041119901ℎ119899
119872119901ℎ
minus1198621198881119904211988811199042
1198721198881
minus1198621199031119903211990311199032
1198721199031
]
+1
1205962119899
3
sum119894=1
[11986211990411198991199041119901ℎ119894
1198721198881
+11986211990311198991199031119901ℎ119894
11987211988811199031
]
+1
1205962119899
3
sum119894=1
[
[
1198961199041119899119892 (1198801199041119901ℎ119894
)
1198721198881
+1198961199031119899119892 (1198801199031119901ℎ119894
)
11987211988811199031
]
]
+1
1205962119899
[
[
1198961199031119899119892 (1198801199031119901ℎ119899
) minus 1198961199041119899119892 (1198801199041119901ℎ119899
)
119872119901ℎ
minus11989611988811199042119892 (11988011988811199042)
1198721198881
minus11989611990311199032119892 (11988011990311199032)
1198721199031
]
]
= 0
(119899 = 1 2 3)
(7b)
11988811199042+11986211988811199042
11987211988811205962119899
11988811199042
minus1
1205962119899
3
sum119894=1
[11986211990411198991199041119901ℎ119894
+ 11986211990311198991199031119901ℎ119894
1198721198881
+119862119904211989911990421199011198971198941199031198881cos120572
11987211990421199031199042
]
+11986211988811199042
11987211990421205962119899
(1199031198881cos1205721199031199042
)
2
11988811199042+11989611988811199042119892 (11988011988811199042)
11987211988811205962119899
+11989611988811199042119892 (11988011988811199042)
11987211990421205962119899
(1199031198881cos1205721199031199042
)
2
minus1
1205962119899
3
sum119894=1
[
[
1198961199041119899119892 (1198801199041119901ℎ119894
) + 1198961199031119899119892(1198801199031119901ℎ119894
)
1198721198881
+1198961199042119899119892 (1198801199042119901119897119894) 1199031198881cos120572
11987211990421199031199042
]
]
= 0
(7c)
1198882+11986211988821198882
11987211988821205962119899
minus
3
sum119894=1
11986211990421198991199042119901119897119894
+ 11986211990321198991199032119901119897119894
11987211988821205962119899
+1198961198882119892 (1198801198882)
11987211988821205962119899
minus
3
sum119894=1
1198961199042119899119892 (1198801199042119901119897119894) + 1198961199032119899119892 (1198801199032119901119897119894)
11987211988821205962119899
= 0
(7d)
1199042119901119897119899
+1
1205962119899
3
sum119894=1
[11986211990421198991199042119901119897119894
1198721199042
+11986211990421198991199042119901119897119894
+ 11986211990321198991199032119901119897119894
1198721198882
]
+1
1205962119899
[11986211990421198991199042119901119897119899
minus 11986211990321198991199032119901119897119899
119872119901119897
minus11986211988821198882
1198721198882
minus11986211988811199042
1198721199042
1199031198881cos120572
11988811199042
1199031199042
]
+1
1205962119899
3
sum119894=1
[
[
1198961199042119899119892 (1198801199042119901119897119894)
1198721199042
+1198961199042119899119892 (1198801199042119901119897119894) + 1198961199032119899119892 (1198801199032119901119897119894)
1198721198882
]
]
+1
1205962119899
[
[
1198961199042119899119892 (1198801199042119901119897119899
) minus 1198961199032119899119892 (1198801199032119901119897119899
)
119872119901119897
minus1198961198882119892 (1198801198882)
1198721198882
minus11989611988811199042
1198721199042
times119892 (11988011988811199042) 1199031198881cos120572
1199031199042
]
]
= 0 (119899 = 1 2 3)
(7e)
1199032119901119897119899
+1
1205962119899
[11986211990321198991199032119901119897119899
minus 11986211990421198991199042119901119897119899
119872119901119897
minus11986211988821198882
1198721198882
+11986211990311199032119903119903111990311199032
11987211990321199031199032
]
+1
1205962119899
3
sum119894=1
[11986211990421198991199042119901119897119894
+ 11986211990321198991199032119901119897119894
1198721198882
+11986211990321198991199032119901119897119899
1198721199032
]
+1
1205962119899
[
[
1198961199032119899119892 (1198801199032119901119897119899
)minus1198961199042119899119892 (1198801199042119901119897119899
)
119872119901119897
minus1198961198882119892 (1198801198882)
1198721198882
+119896119903111990321199031199031119892 (11988011990311199032)
11987211990321199031199032
]
]
6 Mathematical Problems in Engineering
+1
1205962119899
3
sum119894=1
[
[
1198961199042119899119892 (1198801199042119901119897119894)+1198961199032119899119892 (1198801199032119901119897119894)
1198721198882
+1198961199032119899119892 (1198801199032119901119897119894)
1198721199032
]
]
=minus119879out
119872119903211990311990321198871205962119899
(119899 = 1 2 3)
(7f)
11990311199032+1198621199031119903211990311199032
119872119903111990321205962119899
+1
1205962119899
3
sum119894=1
(11986211990321198991199031199031
11987211990321199031199032
1199032119901119897119894
minus1198621199031119899
1198721199031
1199031119901ℎ119894
)
+11989611990311199032119892 (11988011990311199032)
119872119903111990321205962119899
+1
1205962119899
3
sum119894=1
(11989611990321198991199031199031119892 (1198801199032119901119897119894)
11987211990321199031199032
minus1198961199031119899119892 (1198801199031119901ℎ119894
)
1198721199031
)
= minus119879out1199031199031
1198721199032119903211990321198871205962119899
(7g)
where1
11987211990411198881
=1
1198721199041
+1
1198721198881
1
11987211988811199031
=1
1198721198881
+1
1198721199031
1
11987211990311199032
=1
1198721199031
+1199031199031
11987211990321199031199032
(8)
Equations (7a)ndash(7g) can be written in matrix form as
U + CU + K119892 (U) = T (9)
where the piecewise-linear backlash function is defined as
119892 [119880119894119895(119905)] =
119880119894119895(119905) minus 119887
119894119895 119880119894119895gt 119887119894119895
0 minus119887119894119895le 119880119894119895le 119887119894119895
119880119894119895(119905) + 119887
119894119895 119880119894119895lt minus119887119894119895
(10)
3 Solution of Dynamic Equations
31 Dynamic Response Using the Numerical IntegrationIn this section the mathematical model will be solvednumerically by the variable step-size Runge-Kutta integrationmethod firstly The parameters of the closed-form planetarygear set shown in Figure 1 are given in Tables 1 and 2 In thiswork the values of the gearmesh damping coefficients119862
119894119895are
assumed to be constants as 001 [11]By resolving the dynamic differential equations of
motions the dynamic responses (displacement and speed) oflow-stage carrier are gained as shown in Figure 3
32The Acquisition of Analytical Solutions In order to estab-lish the optimization mathematical model of the dynamicbehavior of the closed-form planetary gear set it is necessaryto obtain the analytical solutions ofmodel using the harmonicbalancemethod For limiting the number of algebraic balanceequations only the fundamental frequency harmonic of themesh stiffness functions are considered in this case Similarlyexternal torque functions is also considered to be in the formof mesh stiffness functions And then attention is paid to theperiodic vibrations of system under the harmonic excitationThe procedure of solving (7a)ndash(7g) using HBM [5] includessome aspects as follows(1) According to the assumption previously mentioned
the external excitations that represent fundamental frequencypulsations can be written in the form
T = T119898119894+ T119886119894cos (Ω119905 + 120601
119894) (11)
where T119898119894
is the mean component of torque and T119886119894is the
amplitude of the alternating component of the fundamentalfrequency mesh force 120601
119894is the phase angle
(2) According to the harmonic excitations given in(11) the harmonic balance method solution to (7a)ndash(7g) isassumed in the same form
U = U119898119894+ U119886119894cos (Ω119905 + 120601
119894) (12)
whereU119898119894
andU119886119894are the mean and alternating components
of the steady state response respectively and 120601119894is the phase
angle(3) For relative mesh displacements the piecewise-linear
function in (4a)ndash(4h) can be written in a unified form
119892 (119880119894) = 119873
119898119894119880119898119894+ 119873119886119894119880119886119894cos (Ω119905 + 120601
119894) (13)
where
119873119898119894= 1 +
119902119886119894
2119902119898119894
[119866 (120583+) minus 119866 (120583
minus)]
119873119886119894= 1 minus
1
2[119867 (120583
+) minus 119867 (120583
minus)]
(14)
The expressions of 119866 and119867 are given in the Appendix(4) Considering the mean value and the fundamental
harmonic value of periodically time-varying mesh stiffnessin Figure 2 the elements of stiffness matrix K in (9) can bewritten as
119896119894119895= 119896119898119894119895+ 119896119886119894119895
cos (Ω120591 + 120593119894119895) (15)
So the stiffness matrix K is written in terms of two separatematrices for mean stiffness and alternating stiffness as
K = K119898+ ΔK (16)
where
K119898= [119896119898119894119895]119899times119899
ΔK = [119896119886119894119895
cos (Ω120591 + 120593119894119895)]119899times119899
(17)
Mathematical Problems in Engineering 7
Table 1 Geometric parameters of the closed-form planetary gear set
High-speed stage Low-speed stageSun gear Planet gear Ring gear Sun gear Planet gear Ring gear
Number of teeth 16 38 92 16 24 62Module (mm) 3 3Pressure angle (deg) 215∘ 215∘
Modification coefficient 03 012 054 0475 0471 0309Face width (mm) 22 20 20 345 30 32
Table 2 Physical parameters of the closed-form planetary gear set
High-speed stage Low-speed stageSun Planet Ring Carrier Sun Planet Ring Carrier
Inertia (kgsdotmm2) 8854 827 6888372 680079 33959 46292 11021396 94009Rotation radius (mm) 1107 3278 113 5725 2328 3112 113 28Mean mesh stiffness (Nmm) 119870
1199041119899= 1198701199031119899= 21198907 119870
1199042119899= 1198701199032119899= 21198907
Torsional stiffness (Nmm) 11987011988811199042= 21198907 119870
11990311199032= 101198907 119870
1198882= 101198908
Total mass 69 kg
By substituting (9)ndash(14) into (7a)ndash(7g) and balancing the likeharmonic terms the algebraic equations of system can begained
K119898y119898+K1y3
2+K2y4
2minus T119898= 0119899times1
K119898y3+ K1y119898minus Ω2y1minus ΩCy
2minus T1= 0119899times1
K119898y4+ K2y119898minus Ω2y2+ CΩy
1minus T2= 0119899times1
(18)
where y1= 119902
119886119894cos120593119894119899times1
y2= 119902
119886119894sin120593119894119899times1
y3=
119873119886119894119902119886119894cos120593119894119899times1
y4= 119873119886119894119902119886119894sin120593119894119899times1
y119898= 119873119898119894119902119898119894119899times1
T1
= 119879119886119894cos120601119894119899times1
T2
= 119879119886119894sin120601119894119899times1
K1
=
119896119886119894119895
cos120601119894119895119899times1
and K2= 119896119886119894119895
sin120601119894119895119899times1
The matrices k
119898and C are given in the Appendix
4 Optimization of the Transmission System
41 Variables and Objective Function of Optimization Anumber of key design parameters have great influence onthe dynamic characteristics of the gear transmissions sothey can be chosen as design variables such as numberof each gear module gear width and pressure angle Tosimplify optimization process the module of each stage 119898
1
1198982 number of sun gears of each stage 119911
1199041 1199111199042 and pressure
angle of each stage1205721 1205722are chosen as optimization variables
in this study So the recurrence variables vector for thisoptimization procedure can be written as
119909 = [1198981 1198982 1199111199041 1199111199042 1205721 1205722]119879
(19)
The dynamic characteristics standards of the gear trans-mission include maximum dynamic loads dynamic loadfactor stiffness and displacementvelocityacceleration ofvibration each of these standards can be chosen as opti-mization objective Considering that the rotation centerof the planets in low-stage is unfixed and reducing the
total weight of the transmission system simultaneously thedisplacement of rotational vibration of the low-stage carrierand total mass of the gear set are chosen as optimizationobjective According to the basic idea of the multiobjectiveoptimization two optimization objective functions unifiedusing the normalized weighting method [11] can be writtenin form
119891 = 12058211198911+ 12058221198912 (20)
where 1205821and 120582
2are weighting coefficient here 120582
1= 03
and 1205822= 07 [12] 119891
1and 119891
2are the ampler of the rotational
vibration displacement of the low-stage carrier and totalmass of the gear set respectively Due to limited space theexpressions of 119891
1and 119891
2are not given in detail
42 Constraints
(1) Distributing the number of teeth of each gear con-centric conditions adjacent conditions and assemblyconditions
(2) contact fatigue strength and bending fatigue strengthconstraints
119878119867(119894) ge 119878
119867min 119878119865(119894) ge 119878
119865min
119894 = 1199041 1199042 1199031 1199032 119901ℎ 119901119897
(21)
(3) contact ratio constraints
120576119894119895ge 15 119894 = 119904
1 1199042 1199031 1199032 119895 = 119901ℎ 119901119897 (22)
(4) transmission ratio without loop-power conditions
minus32 le 1198941+ 1198942minus 11989411198942le minus30
0 lt1198942minus 11989411198942
1198941+ 1198942minus 11989411198942
lt 1(23)
8 Mathematical Problems in Engineering
Table 3 Parameters of structure after optimization
High-speed stage Low-speed stageSun gear Planet gear Ring gear Sun gear Planet gear Ring gear
Number of teeth 17 40 97 18 23 66Module (mm) 2 3Pressure angle (deg) 20∘ 20∘
Total mass (kg) 635 kg
0 5 10 15 20 25minus5
minus4
minus3
minus2
minus1
0
1
2
3 Displacement of low-stage carrier
Time (s)
Non
dim
ensio
nal d
ispla
cem
ent
(a) Displacement of low-speed stage carrier
0 5 10 15 20 25minus15
minus1
minus05
0
05
1
15
Time (s)
Non
dim
ensio
nal s
peed
Speed of low-stage carrier
(b) Speed of low-speed stage carrier
Figure 3 Response of low-speed stage carrier without optimization
0 5 10 15 20 25minus5
minus4
minus3
minus2
minus1
0
1
2
3Displacement of low-stage carrier
Time (s)
Non
dim
ensio
nal d
ispla
cem
ent
(a) Displacement of low-speed stage carrier
0 5 10 15 20 25minus15
minus1
minus05
0
05
1
15
Time (s)
Non
dim
ensio
nal s
peed
Speed of low-stage carrier
(b) Speed of low-speed stage carrier
Figure 4 Response of low-speed stage carrier after optimization
where
119894119899= minus119885119903119899
119885119904119899
119899 = 1 2 (24)
(5) minimum tooth thickness constraints
119878119886119894ge 04119898
119895 119894 = 119904
1 1199042 1199031 1199032 119901ℎ 119901119897 119895 = 1 2 (25)
5 Results and Discussions
Some more logical parameters of the closed-form planetarygear set are obtained according to optimization constraintsconditions previously mentioned119898
1= 2 119898
2= 3 119885
1199041= 17
1198851199042= 18 120572
1= 1205722= 20∘ Further other parameters of
transmission can be computed as shown in Table 3 Total
Mathematical Problems in Engineering 9
mass of gear set is 635 kg Comparing the results betweenbefore and after the optimization it is clear that transmissionsystem reduces the total mass of 86 and the dynamiccharacteristic significantly improves as well It is also evidentfrom the comparison of Figure 3 with Figure 4 that thedisplacement of each structure significantly reduces at thesame time It is obvious that the scope of the amplitude ofdisplacement of low-stage carrier is minus3 to 3 in Figure 4(a)while that in Figure 3(a) is minus5 to 3
6 Conclusions
Considering the gear backlash time-varying mesh stiffnessand excitation fluctuation and so forth a discrete nonlineardynamic model of a two stages closed-form planetary set wasproposed in this study In order to facilitate the analysis andcomparison of system response between before and after opti-mization nonlinear differential equations of motion of thedynamic model were solved using a Runge-Kutta numericalintegrationmethod For optimization of transmission systemthe analytical solutions were obtainedThe total optimizationobjective function is obtained using the normalized weightsmethod
A case shows that the total mass of transmission systemhas significantly reduced and dynamic characteristic has dis-tinctly improved Effectiveness of the dynamicmodel and thedynamic optimization mathematic model is demonstrated
Appendix
Consider the following
119866 (120583) =
(2
120587)(120583 sinminus1120583 + radic1 minus 1205832) 1003816100381610038161003816120583
1003816100381610038161003816 le 1
10038161003816100381610038161205831003816100381610038161003816
10038161003816100381610038161205831003816100381610038161003816 gt 1
119867 (120583) =
minus1 120583 lt minus1
(2120583
120587)(sinminus1120583 + radic1 minus 1205832) 1003816100381610038161003816120583
1003816100381610038161003816 le 1
1 120583 gt 1
(A1)
The elements of the stiffness matrix k119898are given as follows
119896 (1 1) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
+1
119872119901ℎ
)
119896 (1 119894) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
) 119894 = 2 3
119896 (1 4) =1198961199031119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (1 119894) =1198961199031119899
11987211988811205962119899
119894 = 5 6
119896 (1 7) = minus11989611988811199042
11987211988811205962119899
119896 (2 119894) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
) 119894 = 1 3
119896 (2 7) = minus11989611988811199042
11987211988811205962119899
119896 (2 2) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
+1
119872119901ℎ
)
119896 (2 119894) =1198961199031119899
11987211988811205962119899
119894 = 4 6
119896 (2 5) =1198961199031119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (2 119894) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
) 119894 = 1 3
119896 (2 2) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
+1
119872119901ℎ
)
119896 (2 119894) =1198961199031119899
11987211988811205962119899
119894 = 4 6
119896 (2 5) =1198961199031119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (2 7) = minus11989611988811199042
11987211988811205962119899
119896 (3 119894) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
) 119894 = 1 2
119896 (3 3) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
+1
119872119901ℎ
)
119896 (3 119894) =1198961199031119899
11987211988811205962119899
119894 = 4 5
119896 (3 6) =1198961199031119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (3 7) = minus11989611988811199042
11987211988811205962119899
119896 (4 1) =1198961199041119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (4 119894) =1198961199041119899
11987211988811205962119899
119894 = 2 3
119896 (4 7) = minus11989611988811199042
11987211988811205962119899
119896 (4 4) =1198961199031119899
1205962119899
(1
119872119901ℎ
+1
1198721198881
+1
1198721199031
)
10 Mathematical Problems in Engineering
119896 (4 119894) =1198961199031119899
1205962119899
(1
1198721198881
+1
1198721199031
) 119894 = 5 6
119896 (4 15) = minus11989611990311199032
11987211990311205962119899
119896 (5 119894) =1198961199041119899
11987211988811205962119899
119894 = 1 3
119896 (5 2) =1198961199041119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (5 119894) =1198961199031119899
1205962119899
(1
1198721198881
+1
1198721199031
) 119894 = 5 6
119896 (5 5) =1198961199031119899
1205962119899
(1
119872119901ℎ
+1
1198721198881
+1
1198721199031
)
119896 (5 7) = minus11989611988811199042
11987211988811205962119899
119896 (5 15) = minus11989611990311199032
11987211990311205962119899
119896 (6 119894) =1198961199041119899
11987211988811205962119899
119894 = 1 2
119896 (6 3) =1198961199041119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (6 119894) =1198961199031119899
1205962119899
(1
1198721198881
+1
1198721199031
) 119894 = 4 5
119896 (6 6) =1198961199031119899
1205962119899
(1
119872119901ℎ
+1
1198721198881
+1
1198721199031
)
119896 (6 7) = minus11989611988811199042
11987211988811205962119899
119896 (6 15) = minus11989611990311199032
11987211990311205962119899
119896 (7 119894) = minus1198961199041119899
11987211988811205962119899
119894 = 1 2 3
119896 (7 119894) = minus1198961199031119899
11987211988811205962119899
119894 = 4 5 6
119896 (7 7) =11989611988811199042
1205962119899
[1
1198721198881
+1
1198721199042
(1199031198881cos1205721199031199042
)
2
]
119896 (7 119894) = minus1198961199042119899
11987211990421205962119899
1199031198881cos1205721199031199042
119894 = 9 10 11
119896 (8 8) =1198961198882
11987211988821205962119899
119896 (8 119894) = minus1198961199042119899
11987211988821205962119899
119894 = 9 10 11
119896 (8 119894) = minus1198961199032119899
11987211988821205962119899
119894 = 12 13 14
119896 (9 7) = minus11989611988811199042
11987211990421205962119899
1199031198881cos1205721199031199042
119896 (9 8) = minus1198961198882
11987211988821205962119899
119896 (9 9) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
+1
119872119901119897
)
119896 (9 119894) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
) 119894 = 10 11
119896 (9 12) =1198961199032119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (9 119894) =1198961199032119899
11987211988821205962119899
119894 = 13 14
119896 (10 7) = minus11989611988811199042
11987211990421205962119899
1199031198881cos1205721199031199042
119896 (10 8) = minus1198961198882
11987211988821205962119899
119896 (10 119894) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
) 119894 = 9 10
119896 (10 10) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
+1
119872119901119897
)
119896 (10 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 14
119896 (10 13) =1198961199032119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (11 7) = minus11989611988811199042
11987211990421205962119899
1199031198881cos1205721199031199042
119896 (11 8) = minus1198961198882
11987211988821205962119899
119896 (11 119894) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
) 119894 = 9 10
119896 (11 11) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
+1
119872119901119897
)
119896 (11 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 13
119896 (11 14) =1198961199032119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (12 8) = minus1198961198882
11987211988821205962119899
Mathematical Problems in Engineering 11
119896 (12 15) =119896119903111990321199031199031
119872119903212059621198991199031199032
119896 (12 9) =1198961199042119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (12 119894) =1198961199042119899
11987211988821205962119899
119894 = 10 11
119896 (12 12) =1198961199032119899
1205962119899
(1
119872119901119897
+1
1198721198882
)
119896 (12 119894) =1198961199032119899
11987211988821205962119899
119894 = 13 14
119896 (13 8) = minus1198961198882
11987211988821205962119899
119896 (13 10) =1198961199042119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (13 119894) =1198961199042119899
11987211988821205962119899
119894 = 9 11
119896 (13 13) =1198961199032119899
1205962119899
(1
119872119901119897
+1
1198721198882
)
119896 (13 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 14
119896 (13 15) =119896119903111990321199031199031
119872119903212059621198991199031199032
119896 (14 8) = minus1198961198882
11987211988821205962119899
119896 (14 11) =1198961199042119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (14 119894) =1198961199042119899
11987211988821205962119899
119894 = 9 10
119896 (14 14) =1198961199032119899
1205962119899
(1
119872119901119897
+1
1198721198882
)
119896 (14 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 13
119896 (14 15) =119896119903111990321199031199031
119872119903212059621198991199031199032
119896 (15 119894) = minus1198961199031119899
11987211990311205962119899
119894 = 4 5 6
119896 (15 119894) =11989611990321198991199031199031
119872119903211990311990321205962119899
119894 = 12 13 14
119896 (15 15) =11989611990311199032
1205962119899
(1
1198721199031
+1199031199031
11987211990321199031199032
)
(A2)
The elements of k119898not listed previously are taken as zeros
The matrix C is in the similar form of k119898and no longer is
listed in detail here
Notations
HBM Harmonic balance method119887 Half of clearance (backlash)119896 Gear mesh stiffness119903 Ring gear119892 Discontinuous displacement function119868 Polar mass moment of inertia119894 Transmission ratio119888 Carrier119898 Actual mass119905 Dimensional time119906 Actual equivalent transverse displacement in
the direction of pressure line119880 Relative equivalent transverse displacement
in the direction of pressure line119904 Sun gear119899119901 Number of planet
T Torque120579 Angular displacement119862 Damping coefficient119885 Number of gear119903 Base cycle radius119872 Equivalent mass119905 Nondimensional time120572 Pressure angle
Acknowledgments
Thiswork is supported by theNational Natural Science Foun-dation of China (no 51175299) Shandong Province NaturalScience Foundation of China (ZR2010EM012) and ShandongUniversity Independent Innovation Foundation ofChina (no2012TS048)
References
[1] F Cunliffe J D Smith and D B Welbourn ldquoDynamic toothloads in epicyclic gearsrdquo Transactions of the ASME Journal ofEngineering for Industry vol 96 no 2 pp 578ndash584 1974
[2] M Botman ldquoEpicyclic gear vibrationsrdquo Transactions of theASME Journal of Engineering for Industry vol 98 no 3 pp 811ndash815 1976
[3] G Antony ldquoGear vibration-investigation of the dynamic behav-ior of one stage epicyclic gearsrdquo AGMA Technical Paper 88-FTM-12 1988
[4] A Kahraman ldquoFree torsional vibration characteristics of com-pound planetary gear setsrdquo Mechanism and Machine Theoryvol 36 no 8 pp 953ndash971 2001
[5] T Sun and H Hu ldquoNonlinear dynamics of a planetary gearsystem with multiple clearancesrdquo Mechanism and MachineTheory vol 38 no 12 pp 1371ndash1390 2003
[6] A Al-shyyab and A Kahraman ldquoA non-linear dynamic modelfor planetary gear setsrdquo Proceedings of the Institution ofMechan-ical Engineers K Journal of Multi-body Dynamics vol 221 no 4pp 567ndash576 2007
12 Mathematical Problems in Engineering
[7] A Al-Shyyab K Alwidyan A Jawarneh and H Tlilan ldquoNon-linear dynamic behaviour of compound planetary gear trainsmodel formulation and semi-analytical solutionrdquo Proceedings ofthe Institution of Mechanical Engineers K Journal of Multi-bodyDynamics vol 223 no 3 pp 199ndash210 2009
[8] T Zeng Bao Z Yi Fang and L Wei Zhong ldquoMany stage helicalgear train systemoptimal designwhich takes the dynamic prop-erties as an objective functionrdquo Chinese Journal of MechanicalEngineering vol 30 no 5 pp 66ndash75 1994 (Chinese)
[9] X Guan Wei Y Jia Jun X LaiYuan et al ldquoDynamic optimaldesign on planetary driverrdquoMechanical Science and Technologyvol 17 no 2 pp 209ndash217 1998 (Chinese)
[10] G W Blankenship and A Kahraman ldquoSteady state forcedresponse of a mechanical oscillator with combined parametricexcitation and clearance type non-linearityrdquo Journal of Soundand Vibration vol 185 no 5 pp 743ndash765 1995
[11] HGuang andWGuiCheng ldquoDynamics optimization design ofclosed epicyclic gear trainsrdquoMechanical Science and Technologyvol 23 no 9 pp 1131ndash1134 2004 (Chinese)
[12] D-T Qin X-G Gu J-H Wang and J-G Liu ldquoDynamicanalysis and optimization of gear trains in amegawatt level windturbinerdquo Journal of Chongqing University vol 32 no 4 pp 408ndash414 2009 (Chinese)
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
11987211988821198882+ 11986211988821198882
minus
3
sum119894=1
(11986211990421198991199042119901119897119894
+ 11986211990321198991199032119901119897119894) + 11989611988821198801198882
minus
3
sum119894=1
[11989611990421198991198801199042119901119897119894
+ 11989611990321198991198801199032119901119897119894] = 0
(4e)
11987211990321199032minus 1198621199031119903211990311199032
1199031199031
1199031199032
minus
3
sum119894=1
11986211990321198991199032119901119897119894
minus 1198961199031119903211988011990311199032
1199031199031
1199031199032
minus
3
sum119894=1
11989611990321198991198801199032119901119897119894
=119879out1199031199032
(4f)
11987211990421199042minus 1198621198881119904211988811199042
1199031198881cos1205721199031199042
+
3
sum119894=1
11986211990421198991199042119901119897119894
minus 1198961198881119904211988011988811199042
1199031198881cos1205721199031199042
+
3
sum119894=1
11989611990421198991198801199042119901119897119894
= 0
(4g)
119872119901119897119897119899minus 11986211990421198991199042119901119897119899
+ 11986211990321198991199032119901119897119899
minus 11989611990421198991198801199042119901119897119899
+ 11989611990321198991198801199032119901119897119899
= 0 (119899 = 1 2 3) (4h)
where 1198681198881= 11986810158401198881+ 3119898119901ℎ11990321198881
is the equivalent mass momentof inertia of the carrier including planet gears in high-speedstage 1198681015840
1198881is the inertia of the carrier in high-speed stage
119898119901ℎ
is the actual mass of planet-gear in high-speed stageand 1199031198881
is the distribution circle radius of the planet gears1198681198881= 119872119888111990321198871198881
1198721198881
is the equivalent mass of the carrier inhigh-speed stage with respect to the its equivalent base circleradius 119903
1198871198881is equivalent base circle radius of the carrier in
high-speed stage 1199031198871198881= 1199031198881cos120572 119868
1199031= 119872119903111990321199031 and119872
1199031is the
equivalent mass of the ring in low-speed stage with respect toits base circle radius 119868
1199041= 119872119904111990321199041 and119872
1199041is the equivalent
mass of the sun gear in low-speed stage with respect to itsbase circle radius 119868
119901ℎ119899= 119872119901ℎ1199032119901ℎ and119872
119901ℎis the equivalent
mass of the planet-gear in high-speed stage with respect to itsequivalent base circle radius 119868
1198882= 1198681015840
1198882+31198981199011198971199032
1198882 and 1198681015840
1198882is the
moment of inertia of the carrier in low-speed stageDynamic model of motion of transmission has consider-
able difficulties in its solution procedure as follows (1) As asemidefinite system its first-order natural frequency is zerocorresponding to a rigid body motion (2) The piecewise-linear function 119892 represents the gear backlash and thenumber of variables is even different according to the externaland internal gear pairs (3) As both linear and nonlinearrestoring forces exist in the equations it is not possibleto write out the governing equation in matrix form whilea general solution technique applicable to the systems ofmultiple degrees of freedom must be based on matrix form
Therefore (4a)ndash(4h) are simplified further by introducinga set of new variables
1198801199041119901ℎ119899
= 1199061199041minus 1199061198881minus 119906ℎ119899 (5a)
1198801199031119901ℎ119899
= 119906ℎ119899minus 1199061198881minus 1199061199031 (5b)
11988011988811199042= 1199061198881minus1199031198881cos1205721199031199042
1199061199042 (5c)
1198801198882= 1199061198882 (5d)
1198801199042119901ℎ119899
= 1199061199042minus 1199061198882minus 119906119897119899 (5e)
1198801199032119901ℎ119899
= 119906119897119899minus 1199061198882minus 1199061199032 (5f)
11988011990311199032
= 1199061199031minus1199031199031
1199031199032
1199061199032 (5g)
The new coordinate variables defined previously not onlyhave intuitional physicalmeaning but also eliminate the rigidbody motion Furthermore the piecewise-linear backlashfunction 119892 can be written as a set of functions with a singlevariable according to (5a)ndash(5g)
In addition nondimensional parameters of (4a)ndash(4h) canbe obtained by a characteristic length 119887 and frequency 120596
119899=
radic11989611990411198991198721199041 such that
119905 = 120596119899119905 (6)
Hence a set of simplified equations of motions of thetransmission system is obtained by substituting (5a)ndash(5g) and(6) into (4a)ndash(4h)
1199041119901ℎ119899
+1
1205962119899
3
sum119894=1
[11986211990411198991199041119901ℎ119894
11987211990411198881
+11986211990311198991199031119901ℎ119894
1198721198881
]
+1
1205962119899
[11986211990411198991199041119901ℎ119899
minus 11986211990311198991199031119901ℎ119899
119872119901ℎ
minus1198621198881119904211988811199042
1198721198881
]
+1
1205962119899
3
sum119894=1
[
[
1198961199041119899119892 (1198801199041119901ℎ119894
)
11987211990411198881
+1198961199031119899119892 (1198801199031119901ℎ119894
)
1198721198881
]
]
+1
1205962119899
[
[
1198961199041119899119892 (1198801199041119901ℎ119899
) minus 1198961199031119899119892 (1198801199031119901ℎ119899
)
119872119901ℎ
minus11989611988811199042119892 (11988011988811199042)
1198721198881
]
]
=119879in
119903119904111987211990411198871205962119899
(119899 = 1 2 3)
(7a)
Mathematical Problems in Engineering 5
1199031119901ℎ119899
+1
1205962119899
[11986211990311198991199031119901ℎ119899
minus 11986211990411198991199041119901ℎ119899
119872119901ℎ
minus1198621198881119904211988811199042
1198721198881
minus1198621199031119903211990311199032
1198721199031
]
+1
1205962119899
3
sum119894=1
[11986211990411198991199041119901ℎ119894
1198721198881
+11986211990311198991199031119901ℎ119894
11987211988811199031
]
+1
1205962119899
3
sum119894=1
[
[
1198961199041119899119892 (1198801199041119901ℎ119894
)
1198721198881
+1198961199031119899119892 (1198801199031119901ℎ119894
)
11987211988811199031
]
]
+1
1205962119899
[
[
1198961199031119899119892 (1198801199031119901ℎ119899
) minus 1198961199041119899119892 (1198801199041119901ℎ119899
)
119872119901ℎ
minus11989611988811199042119892 (11988011988811199042)
1198721198881
minus11989611990311199032119892 (11988011990311199032)
1198721199031
]
]
= 0
(119899 = 1 2 3)
(7b)
11988811199042+11986211988811199042
11987211988811205962119899
11988811199042
minus1
1205962119899
3
sum119894=1
[11986211990411198991199041119901ℎ119894
+ 11986211990311198991199031119901ℎ119894
1198721198881
+119862119904211989911990421199011198971198941199031198881cos120572
11987211990421199031199042
]
+11986211988811199042
11987211990421205962119899
(1199031198881cos1205721199031199042
)
2
11988811199042+11989611988811199042119892 (11988011988811199042)
11987211988811205962119899
+11989611988811199042119892 (11988011988811199042)
11987211990421205962119899
(1199031198881cos1205721199031199042
)
2
minus1
1205962119899
3
sum119894=1
[
[
1198961199041119899119892 (1198801199041119901ℎ119894
) + 1198961199031119899119892(1198801199031119901ℎ119894
)
1198721198881
+1198961199042119899119892 (1198801199042119901119897119894) 1199031198881cos120572
11987211990421199031199042
]
]
= 0
(7c)
1198882+11986211988821198882
11987211988821205962119899
minus
3
sum119894=1
11986211990421198991199042119901119897119894
+ 11986211990321198991199032119901119897119894
11987211988821205962119899
+1198961198882119892 (1198801198882)
11987211988821205962119899
minus
3
sum119894=1
1198961199042119899119892 (1198801199042119901119897119894) + 1198961199032119899119892 (1198801199032119901119897119894)
11987211988821205962119899
= 0
(7d)
1199042119901119897119899
+1
1205962119899
3
sum119894=1
[11986211990421198991199042119901119897119894
1198721199042
+11986211990421198991199042119901119897119894
+ 11986211990321198991199032119901119897119894
1198721198882
]
+1
1205962119899
[11986211990421198991199042119901119897119899
minus 11986211990321198991199032119901119897119899
119872119901119897
minus11986211988821198882
1198721198882
minus11986211988811199042
1198721199042
1199031198881cos120572
11988811199042
1199031199042
]
+1
1205962119899
3
sum119894=1
[
[
1198961199042119899119892 (1198801199042119901119897119894)
1198721199042
+1198961199042119899119892 (1198801199042119901119897119894) + 1198961199032119899119892 (1198801199032119901119897119894)
1198721198882
]
]
+1
1205962119899
[
[
1198961199042119899119892 (1198801199042119901119897119899
) minus 1198961199032119899119892 (1198801199032119901119897119899
)
119872119901119897
minus1198961198882119892 (1198801198882)
1198721198882
minus11989611988811199042
1198721199042
times119892 (11988011988811199042) 1199031198881cos120572
1199031199042
]
]
= 0 (119899 = 1 2 3)
(7e)
1199032119901119897119899
+1
1205962119899
[11986211990321198991199032119901119897119899
minus 11986211990421198991199042119901119897119899
119872119901119897
minus11986211988821198882
1198721198882
+11986211990311199032119903119903111990311199032
11987211990321199031199032
]
+1
1205962119899
3
sum119894=1
[11986211990421198991199042119901119897119894
+ 11986211990321198991199032119901119897119894
1198721198882
+11986211990321198991199032119901119897119899
1198721199032
]
+1
1205962119899
[
[
1198961199032119899119892 (1198801199032119901119897119899
)minus1198961199042119899119892 (1198801199042119901119897119899
)
119872119901119897
minus1198961198882119892 (1198801198882)
1198721198882
+119896119903111990321199031199031119892 (11988011990311199032)
11987211990321199031199032
]
]
6 Mathematical Problems in Engineering
+1
1205962119899
3
sum119894=1
[
[
1198961199042119899119892 (1198801199042119901119897119894)+1198961199032119899119892 (1198801199032119901119897119894)
1198721198882
+1198961199032119899119892 (1198801199032119901119897119894)
1198721199032
]
]
=minus119879out
119872119903211990311990321198871205962119899
(119899 = 1 2 3)
(7f)
11990311199032+1198621199031119903211990311199032
119872119903111990321205962119899
+1
1205962119899
3
sum119894=1
(11986211990321198991199031199031
11987211990321199031199032
1199032119901119897119894
minus1198621199031119899
1198721199031
1199031119901ℎ119894
)
+11989611990311199032119892 (11988011990311199032)
119872119903111990321205962119899
+1
1205962119899
3
sum119894=1
(11989611990321198991199031199031119892 (1198801199032119901119897119894)
11987211990321199031199032
minus1198961199031119899119892 (1198801199031119901ℎ119894
)
1198721199031
)
= minus119879out1199031199031
1198721199032119903211990321198871205962119899
(7g)
where1
11987211990411198881
=1
1198721199041
+1
1198721198881
1
11987211988811199031
=1
1198721198881
+1
1198721199031
1
11987211990311199032
=1
1198721199031
+1199031199031
11987211990321199031199032
(8)
Equations (7a)ndash(7g) can be written in matrix form as
U + CU + K119892 (U) = T (9)
where the piecewise-linear backlash function is defined as
119892 [119880119894119895(119905)] =
119880119894119895(119905) minus 119887
119894119895 119880119894119895gt 119887119894119895
0 minus119887119894119895le 119880119894119895le 119887119894119895
119880119894119895(119905) + 119887
119894119895 119880119894119895lt minus119887119894119895
(10)
3 Solution of Dynamic Equations
31 Dynamic Response Using the Numerical IntegrationIn this section the mathematical model will be solvednumerically by the variable step-size Runge-Kutta integrationmethod firstly The parameters of the closed-form planetarygear set shown in Figure 1 are given in Tables 1 and 2 In thiswork the values of the gearmesh damping coefficients119862
119894119895are
assumed to be constants as 001 [11]By resolving the dynamic differential equations of
motions the dynamic responses (displacement and speed) oflow-stage carrier are gained as shown in Figure 3
32The Acquisition of Analytical Solutions In order to estab-lish the optimization mathematical model of the dynamicbehavior of the closed-form planetary gear set it is necessaryto obtain the analytical solutions ofmodel using the harmonicbalancemethod For limiting the number of algebraic balanceequations only the fundamental frequency harmonic of themesh stiffness functions are considered in this case Similarlyexternal torque functions is also considered to be in the formof mesh stiffness functions And then attention is paid to theperiodic vibrations of system under the harmonic excitationThe procedure of solving (7a)ndash(7g) using HBM [5] includessome aspects as follows(1) According to the assumption previously mentioned
the external excitations that represent fundamental frequencypulsations can be written in the form
T = T119898119894+ T119886119894cos (Ω119905 + 120601
119894) (11)
where T119898119894
is the mean component of torque and T119886119894is the
amplitude of the alternating component of the fundamentalfrequency mesh force 120601
119894is the phase angle
(2) According to the harmonic excitations given in(11) the harmonic balance method solution to (7a)ndash(7g) isassumed in the same form
U = U119898119894+ U119886119894cos (Ω119905 + 120601
119894) (12)
whereU119898119894
andU119886119894are the mean and alternating components
of the steady state response respectively and 120601119894is the phase
angle(3) For relative mesh displacements the piecewise-linear
function in (4a)ndash(4h) can be written in a unified form
119892 (119880119894) = 119873
119898119894119880119898119894+ 119873119886119894119880119886119894cos (Ω119905 + 120601
119894) (13)
where
119873119898119894= 1 +
119902119886119894
2119902119898119894
[119866 (120583+) minus 119866 (120583
minus)]
119873119886119894= 1 minus
1
2[119867 (120583
+) minus 119867 (120583
minus)]
(14)
The expressions of 119866 and119867 are given in the Appendix(4) Considering the mean value and the fundamental
harmonic value of periodically time-varying mesh stiffnessin Figure 2 the elements of stiffness matrix K in (9) can bewritten as
119896119894119895= 119896119898119894119895+ 119896119886119894119895
cos (Ω120591 + 120593119894119895) (15)
So the stiffness matrix K is written in terms of two separatematrices for mean stiffness and alternating stiffness as
K = K119898+ ΔK (16)
where
K119898= [119896119898119894119895]119899times119899
ΔK = [119896119886119894119895
cos (Ω120591 + 120593119894119895)]119899times119899
(17)
Mathematical Problems in Engineering 7
Table 1 Geometric parameters of the closed-form planetary gear set
High-speed stage Low-speed stageSun gear Planet gear Ring gear Sun gear Planet gear Ring gear
Number of teeth 16 38 92 16 24 62Module (mm) 3 3Pressure angle (deg) 215∘ 215∘
Modification coefficient 03 012 054 0475 0471 0309Face width (mm) 22 20 20 345 30 32
Table 2 Physical parameters of the closed-form planetary gear set
High-speed stage Low-speed stageSun Planet Ring Carrier Sun Planet Ring Carrier
Inertia (kgsdotmm2) 8854 827 6888372 680079 33959 46292 11021396 94009Rotation radius (mm) 1107 3278 113 5725 2328 3112 113 28Mean mesh stiffness (Nmm) 119870
1199041119899= 1198701199031119899= 21198907 119870
1199042119899= 1198701199032119899= 21198907
Torsional stiffness (Nmm) 11987011988811199042= 21198907 119870
11990311199032= 101198907 119870
1198882= 101198908
Total mass 69 kg
By substituting (9)ndash(14) into (7a)ndash(7g) and balancing the likeharmonic terms the algebraic equations of system can begained
K119898y119898+K1y3
2+K2y4
2minus T119898= 0119899times1
K119898y3+ K1y119898minus Ω2y1minus ΩCy
2minus T1= 0119899times1
K119898y4+ K2y119898minus Ω2y2+ CΩy
1minus T2= 0119899times1
(18)
where y1= 119902
119886119894cos120593119894119899times1
y2= 119902
119886119894sin120593119894119899times1
y3=
119873119886119894119902119886119894cos120593119894119899times1
y4= 119873119886119894119902119886119894sin120593119894119899times1
y119898= 119873119898119894119902119898119894119899times1
T1
= 119879119886119894cos120601119894119899times1
T2
= 119879119886119894sin120601119894119899times1
K1
=
119896119886119894119895
cos120601119894119895119899times1
and K2= 119896119886119894119895
sin120601119894119895119899times1
The matrices k
119898and C are given in the Appendix
4 Optimization of the Transmission System
41 Variables and Objective Function of Optimization Anumber of key design parameters have great influence onthe dynamic characteristics of the gear transmissions sothey can be chosen as design variables such as numberof each gear module gear width and pressure angle Tosimplify optimization process the module of each stage 119898
1
1198982 number of sun gears of each stage 119911
1199041 1199111199042 and pressure
angle of each stage1205721 1205722are chosen as optimization variables
in this study So the recurrence variables vector for thisoptimization procedure can be written as
119909 = [1198981 1198982 1199111199041 1199111199042 1205721 1205722]119879
(19)
The dynamic characteristics standards of the gear trans-mission include maximum dynamic loads dynamic loadfactor stiffness and displacementvelocityacceleration ofvibration each of these standards can be chosen as opti-mization objective Considering that the rotation centerof the planets in low-stage is unfixed and reducing the
total weight of the transmission system simultaneously thedisplacement of rotational vibration of the low-stage carrierand total mass of the gear set are chosen as optimizationobjective According to the basic idea of the multiobjectiveoptimization two optimization objective functions unifiedusing the normalized weighting method [11] can be writtenin form
119891 = 12058211198911+ 12058221198912 (20)
where 1205821and 120582
2are weighting coefficient here 120582
1= 03
and 1205822= 07 [12] 119891
1and 119891
2are the ampler of the rotational
vibration displacement of the low-stage carrier and totalmass of the gear set respectively Due to limited space theexpressions of 119891
1and 119891
2are not given in detail
42 Constraints
(1) Distributing the number of teeth of each gear con-centric conditions adjacent conditions and assemblyconditions
(2) contact fatigue strength and bending fatigue strengthconstraints
119878119867(119894) ge 119878
119867min 119878119865(119894) ge 119878
119865min
119894 = 1199041 1199042 1199031 1199032 119901ℎ 119901119897
(21)
(3) contact ratio constraints
120576119894119895ge 15 119894 = 119904
1 1199042 1199031 1199032 119895 = 119901ℎ 119901119897 (22)
(4) transmission ratio without loop-power conditions
minus32 le 1198941+ 1198942minus 11989411198942le minus30
0 lt1198942minus 11989411198942
1198941+ 1198942minus 11989411198942
lt 1(23)
8 Mathematical Problems in Engineering
Table 3 Parameters of structure after optimization
High-speed stage Low-speed stageSun gear Planet gear Ring gear Sun gear Planet gear Ring gear
Number of teeth 17 40 97 18 23 66Module (mm) 2 3Pressure angle (deg) 20∘ 20∘
Total mass (kg) 635 kg
0 5 10 15 20 25minus5
minus4
minus3
minus2
minus1
0
1
2
3 Displacement of low-stage carrier
Time (s)
Non
dim
ensio
nal d
ispla
cem
ent
(a) Displacement of low-speed stage carrier
0 5 10 15 20 25minus15
minus1
minus05
0
05
1
15
Time (s)
Non
dim
ensio
nal s
peed
Speed of low-stage carrier
(b) Speed of low-speed stage carrier
Figure 3 Response of low-speed stage carrier without optimization
0 5 10 15 20 25minus5
minus4
minus3
minus2
minus1
0
1
2
3Displacement of low-stage carrier
Time (s)
Non
dim
ensio
nal d
ispla
cem
ent
(a) Displacement of low-speed stage carrier
0 5 10 15 20 25minus15
minus1
minus05
0
05
1
15
Time (s)
Non
dim
ensio
nal s
peed
Speed of low-stage carrier
(b) Speed of low-speed stage carrier
Figure 4 Response of low-speed stage carrier after optimization
where
119894119899= minus119885119903119899
119885119904119899
119899 = 1 2 (24)
(5) minimum tooth thickness constraints
119878119886119894ge 04119898
119895 119894 = 119904
1 1199042 1199031 1199032 119901ℎ 119901119897 119895 = 1 2 (25)
5 Results and Discussions
Some more logical parameters of the closed-form planetarygear set are obtained according to optimization constraintsconditions previously mentioned119898
1= 2 119898
2= 3 119885
1199041= 17
1198851199042= 18 120572
1= 1205722= 20∘ Further other parameters of
transmission can be computed as shown in Table 3 Total
Mathematical Problems in Engineering 9
mass of gear set is 635 kg Comparing the results betweenbefore and after the optimization it is clear that transmissionsystem reduces the total mass of 86 and the dynamiccharacteristic significantly improves as well It is also evidentfrom the comparison of Figure 3 with Figure 4 that thedisplacement of each structure significantly reduces at thesame time It is obvious that the scope of the amplitude ofdisplacement of low-stage carrier is minus3 to 3 in Figure 4(a)while that in Figure 3(a) is minus5 to 3
6 Conclusions
Considering the gear backlash time-varying mesh stiffnessand excitation fluctuation and so forth a discrete nonlineardynamic model of a two stages closed-form planetary set wasproposed in this study In order to facilitate the analysis andcomparison of system response between before and after opti-mization nonlinear differential equations of motion of thedynamic model were solved using a Runge-Kutta numericalintegrationmethod For optimization of transmission systemthe analytical solutions were obtainedThe total optimizationobjective function is obtained using the normalized weightsmethod
A case shows that the total mass of transmission systemhas significantly reduced and dynamic characteristic has dis-tinctly improved Effectiveness of the dynamicmodel and thedynamic optimization mathematic model is demonstrated
Appendix
Consider the following
119866 (120583) =
(2
120587)(120583 sinminus1120583 + radic1 minus 1205832) 1003816100381610038161003816120583
1003816100381610038161003816 le 1
10038161003816100381610038161205831003816100381610038161003816
10038161003816100381610038161205831003816100381610038161003816 gt 1
119867 (120583) =
minus1 120583 lt minus1
(2120583
120587)(sinminus1120583 + radic1 minus 1205832) 1003816100381610038161003816120583
1003816100381610038161003816 le 1
1 120583 gt 1
(A1)
The elements of the stiffness matrix k119898are given as follows
119896 (1 1) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
+1
119872119901ℎ
)
119896 (1 119894) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
) 119894 = 2 3
119896 (1 4) =1198961199031119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (1 119894) =1198961199031119899
11987211988811205962119899
119894 = 5 6
119896 (1 7) = minus11989611988811199042
11987211988811205962119899
119896 (2 119894) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
) 119894 = 1 3
119896 (2 7) = minus11989611988811199042
11987211988811205962119899
119896 (2 2) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
+1
119872119901ℎ
)
119896 (2 119894) =1198961199031119899
11987211988811205962119899
119894 = 4 6
119896 (2 5) =1198961199031119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (2 119894) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
) 119894 = 1 3
119896 (2 2) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
+1
119872119901ℎ
)
119896 (2 119894) =1198961199031119899
11987211988811205962119899
119894 = 4 6
119896 (2 5) =1198961199031119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (2 7) = minus11989611988811199042
11987211988811205962119899
119896 (3 119894) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
) 119894 = 1 2
119896 (3 3) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
+1
119872119901ℎ
)
119896 (3 119894) =1198961199031119899
11987211988811205962119899
119894 = 4 5
119896 (3 6) =1198961199031119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (3 7) = minus11989611988811199042
11987211988811205962119899
119896 (4 1) =1198961199041119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (4 119894) =1198961199041119899
11987211988811205962119899
119894 = 2 3
119896 (4 7) = minus11989611988811199042
11987211988811205962119899
119896 (4 4) =1198961199031119899
1205962119899
(1
119872119901ℎ
+1
1198721198881
+1
1198721199031
)
10 Mathematical Problems in Engineering
119896 (4 119894) =1198961199031119899
1205962119899
(1
1198721198881
+1
1198721199031
) 119894 = 5 6
119896 (4 15) = minus11989611990311199032
11987211990311205962119899
119896 (5 119894) =1198961199041119899
11987211988811205962119899
119894 = 1 3
119896 (5 2) =1198961199041119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (5 119894) =1198961199031119899
1205962119899
(1
1198721198881
+1
1198721199031
) 119894 = 5 6
119896 (5 5) =1198961199031119899
1205962119899
(1
119872119901ℎ
+1
1198721198881
+1
1198721199031
)
119896 (5 7) = minus11989611988811199042
11987211988811205962119899
119896 (5 15) = minus11989611990311199032
11987211990311205962119899
119896 (6 119894) =1198961199041119899
11987211988811205962119899
119894 = 1 2
119896 (6 3) =1198961199041119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (6 119894) =1198961199031119899
1205962119899
(1
1198721198881
+1
1198721199031
) 119894 = 4 5
119896 (6 6) =1198961199031119899
1205962119899
(1
119872119901ℎ
+1
1198721198881
+1
1198721199031
)
119896 (6 7) = minus11989611988811199042
11987211988811205962119899
119896 (6 15) = minus11989611990311199032
11987211990311205962119899
119896 (7 119894) = minus1198961199041119899
11987211988811205962119899
119894 = 1 2 3
119896 (7 119894) = minus1198961199031119899
11987211988811205962119899
119894 = 4 5 6
119896 (7 7) =11989611988811199042
1205962119899
[1
1198721198881
+1
1198721199042
(1199031198881cos1205721199031199042
)
2
]
119896 (7 119894) = minus1198961199042119899
11987211990421205962119899
1199031198881cos1205721199031199042
119894 = 9 10 11
119896 (8 8) =1198961198882
11987211988821205962119899
119896 (8 119894) = minus1198961199042119899
11987211988821205962119899
119894 = 9 10 11
119896 (8 119894) = minus1198961199032119899
11987211988821205962119899
119894 = 12 13 14
119896 (9 7) = minus11989611988811199042
11987211990421205962119899
1199031198881cos1205721199031199042
119896 (9 8) = minus1198961198882
11987211988821205962119899
119896 (9 9) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
+1
119872119901119897
)
119896 (9 119894) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
) 119894 = 10 11
119896 (9 12) =1198961199032119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (9 119894) =1198961199032119899
11987211988821205962119899
119894 = 13 14
119896 (10 7) = minus11989611988811199042
11987211990421205962119899
1199031198881cos1205721199031199042
119896 (10 8) = minus1198961198882
11987211988821205962119899
119896 (10 119894) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
) 119894 = 9 10
119896 (10 10) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
+1
119872119901119897
)
119896 (10 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 14
119896 (10 13) =1198961199032119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (11 7) = minus11989611988811199042
11987211990421205962119899
1199031198881cos1205721199031199042
119896 (11 8) = minus1198961198882
11987211988821205962119899
119896 (11 119894) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
) 119894 = 9 10
119896 (11 11) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
+1
119872119901119897
)
119896 (11 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 13
119896 (11 14) =1198961199032119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (12 8) = minus1198961198882
11987211988821205962119899
Mathematical Problems in Engineering 11
119896 (12 15) =119896119903111990321199031199031
119872119903212059621198991199031199032
119896 (12 9) =1198961199042119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (12 119894) =1198961199042119899
11987211988821205962119899
119894 = 10 11
119896 (12 12) =1198961199032119899
1205962119899
(1
119872119901119897
+1
1198721198882
)
119896 (12 119894) =1198961199032119899
11987211988821205962119899
119894 = 13 14
119896 (13 8) = minus1198961198882
11987211988821205962119899
119896 (13 10) =1198961199042119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (13 119894) =1198961199042119899
11987211988821205962119899
119894 = 9 11
119896 (13 13) =1198961199032119899
1205962119899
(1
119872119901119897
+1
1198721198882
)
119896 (13 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 14
119896 (13 15) =119896119903111990321199031199031
119872119903212059621198991199031199032
119896 (14 8) = minus1198961198882
11987211988821205962119899
119896 (14 11) =1198961199042119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (14 119894) =1198961199042119899
11987211988821205962119899
119894 = 9 10
119896 (14 14) =1198961199032119899
1205962119899
(1
119872119901119897
+1
1198721198882
)
119896 (14 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 13
119896 (14 15) =119896119903111990321199031199031
119872119903212059621198991199031199032
119896 (15 119894) = minus1198961199031119899
11987211990311205962119899
119894 = 4 5 6
119896 (15 119894) =11989611990321198991199031199031
119872119903211990311990321205962119899
119894 = 12 13 14
119896 (15 15) =11989611990311199032
1205962119899
(1
1198721199031
+1199031199031
11987211990321199031199032
)
(A2)
The elements of k119898not listed previously are taken as zeros
The matrix C is in the similar form of k119898and no longer is
listed in detail here
Notations
HBM Harmonic balance method119887 Half of clearance (backlash)119896 Gear mesh stiffness119903 Ring gear119892 Discontinuous displacement function119868 Polar mass moment of inertia119894 Transmission ratio119888 Carrier119898 Actual mass119905 Dimensional time119906 Actual equivalent transverse displacement in
the direction of pressure line119880 Relative equivalent transverse displacement
in the direction of pressure line119904 Sun gear119899119901 Number of planet
T Torque120579 Angular displacement119862 Damping coefficient119885 Number of gear119903 Base cycle radius119872 Equivalent mass119905 Nondimensional time120572 Pressure angle
Acknowledgments
Thiswork is supported by theNational Natural Science Foun-dation of China (no 51175299) Shandong Province NaturalScience Foundation of China (ZR2010EM012) and ShandongUniversity Independent Innovation Foundation ofChina (no2012TS048)
References
[1] F Cunliffe J D Smith and D B Welbourn ldquoDynamic toothloads in epicyclic gearsrdquo Transactions of the ASME Journal ofEngineering for Industry vol 96 no 2 pp 578ndash584 1974
[2] M Botman ldquoEpicyclic gear vibrationsrdquo Transactions of theASME Journal of Engineering for Industry vol 98 no 3 pp 811ndash815 1976
[3] G Antony ldquoGear vibration-investigation of the dynamic behav-ior of one stage epicyclic gearsrdquo AGMA Technical Paper 88-FTM-12 1988
[4] A Kahraman ldquoFree torsional vibration characteristics of com-pound planetary gear setsrdquo Mechanism and Machine Theoryvol 36 no 8 pp 953ndash971 2001
[5] T Sun and H Hu ldquoNonlinear dynamics of a planetary gearsystem with multiple clearancesrdquo Mechanism and MachineTheory vol 38 no 12 pp 1371ndash1390 2003
[6] A Al-shyyab and A Kahraman ldquoA non-linear dynamic modelfor planetary gear setsrdquo Proceedings of the Institution ofMechan-ical Engineers K Journal of Multi-body Dynamics vol 221 no 4pp 567ndash576 2007
12 Mathematical Problems in Engineering
[7] A Al-Shyyab K Alwidyan A Jawarneh and H Tlilan ldquoNon-linear dynamic behaviour of compound planetary gear trainsmodel formulation and semi-analytical solutionrdquo Proceedings ofthe Institution of Mechanical Engineers K Journal of Multi-bodyDynamics vol 223 no 3 pp 199ndash210 2009
[8] T Zeng Bao Z Yi Fang and L Wei Zhong ldquoMany stage helicalgear train systemoptimal designwhich takes the dynamic prop-erties as an objective functionrdquo Chinese Journal of MechanicalEngineering vol 30 no 5 pp 66ndash75 1994 (Chinese)
[9] X Guan Wei Y Jia Jun X LaiYuan et al ldquoDynamic optimaldesign on planetary driverrdquoMechanical Science and Technologyvol 17 no 2 pp 209ndash217 1998 (Chinese)
[10] G W Blankenship and A Kahraman ldquoSteady state forcedresponse of a mechanical oscillator with combined parametricexcitation and clearance type non-linearityrdquo Journal of Soundand Vibration vol 185 no 5 pp 743ndash765 1995
[11] HGuang andWGuiCheng ldquoDynamics optimization design ofclosed epicyclic gear trainsrdquoMechanical Science and Technologyvol 23 no 9 pp 1131ndash1134 2004 (Chinese)
[12] D-T Qin X-G Gu J-H Wang and J-G Liu ldquoDynamicanalysis and optimization of gear trains in amegawatt level windturbinerdquo Journal of Chongqing University vol 32 no 4 pp 408ndash414 2009 (Chinese)
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
1199031119901ℎ119899
+1
1205962119899
[11986211990311198991199031119901ℎ119899
minus 11986211990411198991199041119901ℎ119899
119872119901ℎ
minus1198621198881119904211988811199042
1198721198881
minus1198621199031119903211990311199032
1198721199031
]
+1
1205962119899
3
sum119894=1
[11986211990411198991199041119901ℎ119894
1198721198881
+11986211990311198991199031119901ℎ119894
11987211988811199031
]
+1
1205962119899
3
sum119894=1
[
[
1198961199041119899119892 (1198801199041119901ℎ119894
)
1198721198881
+1198961199031119899119892 (1198801199031119901ℎ119894
)
11987211988811199031
]
]
+1
1205962119899
[
[
1198961199031119899119892 (1198801199031119901ℎ119899
) minus 1198961199041119899119892 (1198801199041119901ℎ119899
)
119872119901ℎ
minus11989611988811199042119892 (11988011988811199042)
1198721198881
minus11989611990311199032119892 (11988011990311199032)
1198721199031
]
]
= 0
(119899 = 1 2 3)
(7b)
11988811199042+11986211988811199042
11987211988811205962119899
11988811199042
minus1
1205962119899
3
sum119894=1
[11986211990411198991199041119901ℎ119894
+ 11986211990311198991199031119901ℎ119894
1198721198881
+119862119904211989911990421199011198971198941199031198881cos120572
11987211990421199031199042
]
+11986211988811199042
11987211990421205962119899
(1199031198881cos1205721199031199042
)
2
11988811199042+11989611988811199042119892 (11988011988811199042)
11987211988811205962119899
+11989611988811199042119892 (11988011988811199042)
11987211990421205962119899
(1199031198881cos1205721199031199042
)
2
minus1
1205962119899
3
sum119894=1
[
[
1198961199041119899119892 (1198801199041119901ℎ119894
) + 1198961199031119899119892(1198801199031119901ℎ119894
)
1198721198881
+1198961199042119899119892 (1198801199042119901119897119894) 1199031198881cos120572
11987211990421199031199042
]
]
= 0
(7c)
1198882+11986211988821198882
11987211988821205962119899
minus
3
sum119894=1
11986211990421198991199042119901119897119894
+ 11986211990321198991199032119901119897119894
11987211988821205962119899
+1198961198882119892 (1198801198882)
11987211988821205962119899
minus
3
sum119894=1
1198961199042119899119892 (1198801199042119901119897119894) + 1198961199032119899119892 (1198801199032119901119897119894)
11987211988821205962119899
= 0
(7d)
1199042119901119897119899
+1
1205962119899
3
sum119894=1
[11986211990421198991199042119901119897119894
1198721199042
+11986211990421198991199042119901119897119894
+ 11986211990321198991199032119901119897119894
1198721198882
]
+1
1205962119899
[11986211990421198991199042119901119897119899
minus 11986211990321198991199032119901119897119899
119872119901119897
minus11986211988821198882
1198721198882
minus11986211988811199042
1198721199042
1199031198881cos120572
11988811199042
1199031199042
]
+1
1205962119899
3
sum119894=1
[
[
1198961199042119899119892 (1198801199042119901119897119894)
1198721199042
+1198961199042119899119892 (1198801199042119901119897119894) + 1198961199032119899119892 (1198801199032119901119897119894)
1198721198882
]
]
+1
1205962119899
[
[
1198961199042119899119892 (1198801199042119901119897119899
) minus 1198961199032119899119892 (1198801199032119901119897119899
)
119872119901119897
minus1198961198882119892 (1198801198882)
1198721198882
minus11989611988811199042
1198721199042
times119892 (11988011988811199042) 1199031198881cos120572
1199031199042
]
]
= 0 (119899 = 1 2 3)
(7e)
1199032119901119897119899
+1
1205962119899
[11986211990321198991199032119901119897119899
minus 11986211990421198991199042119901119897119899
119872119901119897
minus11986211988821198882
1198721198882
+11986211990311199032119903119903111990311199032
11987211990321199031199032
]
+1
1205962119899
3
sum119894=1
[11986211990421198991199042119901119897119894
+ 11986211990321198991199032119901119897119894
1198721198882
+11986211990321198991199032119901119897119899
1198721199032
]
+1
1205962119899
[
[
1198961199032119899119892 (1198801199032119901119897119899
)minus1198961199042119899119892 (1198801199042119901119897119899
)
119872119901119897
minus1198961198882119892 (1198801198882)
1198721198882
+119896119903111990321199031199031119892 (11988011990311199032)
11987211990321199031199032
]
]
6 Mathematical Problems in Engineering
+1
1205962119899
3
sum119894=1
[
[
1198961199042119899119892 (1198801199042119901119897119894)+1198961199032119899119892 (1198801199032119901119897119894)
1198721198882
+1198961199032119899119892 (1198801199032119901119897119894)
1198721199032
]
]
=minus119879out
119872119903211990311990321198871205962119899
(119899 = 1 2 3)
(7f)
11990311199032+1198621199031119903211990311199032
119872119903111990321205962119899
+1
1205962119899
3
sum119894=1
(11986211990321198991199031199031
11987211990321199031199032
1199032119901119897119894
minus1198621199031119899
1198721199031
1199031119901ℎ119894
)
+11989611990311199032119892 (11988011990311199032)
119872119903111990321205962119899
+1
1205962119899
3
sum119894=1
(11989611990321198991199031199031119892 (1198801199032119901119897119894)
11987211990321199031199032
minus1198961199031119899119892 (1198801199031119901ℎ119894
)
1198721199031
)
= minus119879out1199031199031
1198721199032119903211990321198871205962119899
(7g)
where1
11987211990411198881
=1
1198721199041
+1
1198721198881
1
11987211988811199031
=1
1198721198881
+1
1198721199031
1
11987211990311199032
=1
1198721199031
+1199031199031
11987211990321199031199032
(8)
Equations (7a)ndash(7g) can be written in matrix form as
U + CU + K119892 (U) = T (9)
where the piecewise-linear backlash function is defined as
119892 [119880119894119895(119905)] =
119880119894119895(119905) minus 119887
119894119895 119880119894119895gt 119887119894119895
0 minus119887119894119895le 119880119894119895le 119887119894119895
119880119894119895(119905) + 119887
119894119895 119880119894119895lt minus119887119894119895
(10)
3 Solution of Dynamic Equations
31 Dynamic Response Using the Numerical IntegrationIn this section the mathematical model will be solvednumerically by the variable step-size Runge-Kutta integrationmethod firstly The parameters of the closed-form planetarygear set shown in Figure 1 are given in Tables 1 and 2 In thiswork the values of the gearmesh damping coefficients119862
119894119895are
assumed to be constants as 001 [11]By resolving the dynamic differential equations of
motions the dynamic responses (displacement and speed) oflow-stage carrier are gained as shown in Figure 3
32The Acquisition of Analytical Solutions In order to estab-lish the optimization mathematical model of the dynamicbehavior of the closed-form planetary gear set it is necessaryto obtain the analytical solutions ofmodel using the harmonicbalancemethod For limiting the number of algebraic balanceequations only the fundamental frequency harmonic of themesh stiffness functions are considered in this case Similarlyexternal torque functions is also considered to be in the formof mesh stiffness functions And then attention is paid to theperiodic vibrations of system under the harmonic excitationThe procedure of solving (7a)ndash(7g) using HBM [5] includessome aspects as follows(1) According to the assumption previously mentioned
the external excitations that represent fundamental frequencypulsations can be written in the form
T = T119898119894+ T119886119894cos (Ω119905 + 120601
119894) (11)
where T119898119894
is the mean component of torque and T119886119894is the
amplitude of the alternating component of the fundamentalfrequency mesh force 120601
119894is the phase angle
(2) According to the harmonic excitations given in(11) the harmonic balance method solution to (7a)ndash(7g) isassumed in the same form
U = U119898119894+ U119886119894cos (Ω119905 + 120601
119894) (12)
whereU119898119894
andU119886119894are the mean and alternating components
of the steady state response respectively and 120601119894is the phase
angle(3) For relative mesh displacements the piecewise-linear
function in (4a)ndash(4h) can be written in a unified form
119892 (119880119894) = 119873
119898119894119880119898119894+ 119873119886119894119880119886119894cos (Ω119905 + 120601
119894) (13)
where
119873119898119894= 1 +
119902119886119894
2119902119898119894
[119866 (120583+) minus 119866 (120583
minus)]
119873119886119894= 1 minus
1
2[119867 (120583
+) minus 119867 (120583
minus)]
(14)
The expressions of 119866 and119867 are given in the Appendix(4) Considering the mean value and the fundamental
harmonic value of periodically time-varying mesh stiffnessin Figure 2 the elements of stiffness matrix K in (9) can bewritten as
119896119894119895= 119896119898119894119895+ 119896119886119894119895
cos (Ω120591 + 120593119894119895) (15)
So the stiffness matrix K is written in terms of two separatematrices for mean stiffness and alternating stiffness as
K = K119898+ ΔK (16)
where
K119898= [119896119898119894119895]119899times119899
ΔK = [119896119886119894119895
cos (Ω120591 + 120593119894119895)]119899times119899
(17)
Mathematical Problems in Engineering 7
Table 1 Geometric parameters of the closed-form planetary gear set
High-speed stage Low-speed stageSun gear Planet gear Ring gear Sun gear Planet gear Ring gear
Number of teeth 16 38 92 16 24 62Module (mm) 3 3Pressure angle (deg) 215∘ 215∘
Modification coefficient 03 012 054 0475 0471 0309Face width (mm) 22 20 20 345 30 32
Table 2 Physical parameters of the closed-form planetary gear set
High-speed stage Low-speed stageSun Planet Ring Carrier Sun Planet Ring Carrier
Inertia (kgsdotmm2) 8854 827 6888372 680079 33959 46292 11021396 94009Rotation radius (mm) 1107 3278 113 5725 2328 3112 113 28Mean mesh stiffness (Nmm) 119870
1199041119899= 1198701199031119899= 21198907 119870
1199042119899= 1198701199032119899= 21198907
Torsional stiffness (Nmm) 11987011988811199042= 21198907 119870
11990311199032= 101198907 119870
1198882= 101198908
Total mass 69 kg
By substituting (9)ndash(14) into (7a)ndash(7g) and balancing the likeharmonic terms the algebraic equations of system can begained
K119898y119898+K1y3
2+K2y4
2minus T119898= 0119899times1
K119898y3+ K1y119898minus Ω2y1minus ΩCy
2minus T1= 0119899times1
K119898y4+ K2y119898minus Ω2y2+ CΩy
1minus T2= 0119899times1
(18)
where y1= 119902
119886119894cos120593119894119899times1
y2= 119902
119886119894sin120593119894119899times1
y3=
119873119886119894119902119886119894cos120593119894119899times1
y4= 119873119886119894119902119886119894sin120593119894119899times1
y119898= 119873119898119894119902119898119894119899times1
T1
= 119879119886119894cos120601119894119899times1
T2
= 119879119886119894sin120601119894119899times1
K1
=
119896119886119894119895
cos120601119894119895119899times1
and K2= 119896119886119894119895
sin120601119894119895119899times1
The matrices k
119898and C are given in the Appendix
4 Optimization of the Transmission System
41 Variables and Objective Function of Optimization Anumber of key design parameters have great influence onthe dynamic characteristics of the gear transmissions sothey can be chosen as design variables such as numberof each gear module gear width and pressure angle Tosimplify optimization process the module of each stage 119898
1
1198982 number of sun gears of each stage 119911
1199041 1199111199042 and pressure
angle of each stage1205721 1205722are chosen as optimization variables
in this study So the recurrence variables vector for thisoptimization procedure can be written as
119909 = [1198981 1198982 1199111199041 1199111199042 1205721 1205722]119879
(19)
The dynamic characteristics standards of the gear trans-mission include maximum dynamic loads dynamic loadfactor stiffness and displacementvelocityacceleration ofvibration each of these standards can be chosen as opti-mization objective Considering that the rotation centerof the planets in low-stage is unfixed and reducing the
total weight of the transmission system simultaneously thedisplacement of rotational vibration of the low-stage carrierand total mass of the gear set are chosen as optimizationobjective According to the basic idea of the multiobjectiveoptimization two optimization objective functions unifiedusing the normalized weighting method [11] can be writtenin form
119891 = 12058211198911+ 12058221198912 (20)
where 1205821and 120582
2are weighting coefficient here 120582
1= 03
and 1205822= 07 [12] 119891
1and 119891
2are the ampler of the rotational
vibration displacement of the low-stage carrier and totalmass of the gear set respectively Due to limited space theexpressions of 119891
1and 119891
2are not given in detail
42 Constraints
(1) Distributing the number of teeth of each gear con-centric conditions adjacent conditions and assemblyconditions
(2) contact fatigue strength and bending fatigue strengthconstraints
119878119867(119894) ge 119878
119867min 119878119865(119894) ge 119878
119865min
119894 = 1199041 1199042 1199031 1199032 119901ℎ 119901119897
(21)
(3) contact ratio constraints
120576119894119895ge 15 119894 = 119904
1 1199042 1199031 1199032 119895 = 119901ℎ 119901119897 (22)
(4) transmission ratio without loop-power conditions
minus32 le 1198941+ 1198942minus 11989411198942le minus30
0 lt1198942minus 11989411198942
1198941+ 1198942minus 11989411198942
lt 1(23)
8 Mathematical Problems in Engineering
Table 3 Parameters of structure after optimization
High-speed stage Low-speed stageSun gear Planet gear Ring gear Sun gear Planet gear Ring gear
Number of teeth 17 40 97 18 23 66Module (mm) 2 3Pressure angle (deg) 20∘ 20∘
Total mass (kg) 635 kg
0 5 10 15 20 25minus5
minus4
minus3
minus2
minus1
0
1
2
3 Displacement of low-stage carrier
Time (s)
Non
dim
ensio
nal d
ispla
cem
ent
(a) Displacement of low-speed stage carrier
0 5 10 15 20 25minus15
minus1
minus05
0
05
1
15
Time (s)
Non
dim
ensio
nal s
peed
Speed of low-stage carrier
(b) Speed of low-speed stage carrier
Figure 3 Response of low-speed stage carrier without optimization
0 5 10 15 20 25minus5
minus4
minus3
minus2
minus1
0
1
2
3Displacement of low-stage carrier
Time (s)
Non
dim
ensio
nal d
ispla
cem
ent
(a) Displacement of low-speed stage carrier
0 5 10 15 20 25minus15
minus1
minus05
0
05
1
15
Time (s)
Non
dim
ensio
nal s
peed
Speed of low-stage carrier
(b) Speed of low-speed stage carrier
Figure 4 Response of low-speed stage carrier after optimization
where
119894119899= minus119885119903119899
119885119904119899
119899 = 1 2 (24)
(5) minimum tooth thickness constraints
119878119886119894ge 04119898
119895 119894 = 119904
1 1199042 1199031 1199032 119901ℎ 119901119897 119895 = 1 2 (25)
5 Results and Discussions
Some more logical parameters of the closed-form planetarygear set are obtained according to optimization constraintsconditions previously mentioned119898
1= 2 119898
2= 3 119885
1199041= 17
1198851199042= 18 120572
1= 1205722= 20∘ Further other parameters of
transmission can be computed as shown in Table 3 Total
Mathematical Problems in Engineering 9
mass of gear set is 635 kg Comparing the results betweenbefore and after the optimization it is clear that transmissionsystem reduces the total mass of 86 and the dynamiccharacteristic significantly improves as well It is also evidentfrom the comparison of Figure 3 with Figure 4 that thedisplacement of each structure significantly reduces at thesame time It is obvious that the scope of the amplitude ofdisplacement of low-stage carrier is minus3 to 3 in Figure 4(a)while that in Figure 3(a) is minus5 to 3
6 Conclusions
Considering the gear backlash time-varying mesh stiffnessand excitation fluctuation and so forth a discrete nonlineardynamic model of a two stages closed-form planetary set wasproposed in this study In order to facilitate the analysis andcomparison of system response between before and after opti-mization nonlinear differential equations of motion of thedynamic model were solved using a Runge-Kutta numericalintegrationmethod For optimization of transmission systemthe analytical solutions were obtainedThe total optimizationobjective function is obtained using the normalized weightsmethod
A case shows that the total mass of transmission systemhas significantly reduced and dynamic characteristic has dis-tinctly improved Effectiveness of the dynamicmodel and thedynamic optimization mathematic model is demonstrated
Appendix
Consider the following
119866 (120583) =
(2
120587)(120583 sinminus1120583 + radic1 minus 1205832) 1003816100381610038161003816120583
1003816100381610038161003816 le 1
10038161003816100381610038161205831003816100381610038161003816
10038161003816100381610038161205831003816100381610038161003816 gt 1
119867 (120583) =
minus1 120583 lt minus1
(2120583
120587)(sinminus1120583 + radic1 minus 1205832) 1003816100381610038161003816120583
1003816100381610038161003816 le 1
1 120583 gt 1
(A1)
The elements of the stiffness matrix k119898are given as follows
119896 (1 1) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
+1
119872119901ℎ
)
119896 (1 119894) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
) 119894 = 2 3
119896 (1 4) =1198961199031119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (1 119894) =1198961199031119899
11987211988811205962119899
119894 = 5 6
119896 (1 7) = minus11989611988811199042
11987211988811205962119899
119896 (2 119894) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
) 119894 = 1 3
119896 (2 7) = minus11989611988811199042
11987211988811205962119899
119896 (2 2) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
+1
119872119901ℎ
)
119896 (2 119894) =1198961199031119899
11987211988811205962119899
119894 = 4 6
119896 (2 5) =1198961199031119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (2 119894) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
) 119894 = 1 3
119896 (2 2) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
+1
119872119901ℎ
)
119896 (2 119894) =1198961199031119899
11987211988811205962119899
119894 = 4 6
119896 (2 5) =1198961199031119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (2 7) = minus11989611988811199042
11987211988811205962119899
119896 (3 119894) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
) 119894 = 1 2
119896 (3 3) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
+1
119872119901ℎ
)
119896 (3 119894) =1198961199031119899
11987211988811205962119899
119894 = 4 5
119896 (3 6) =1198961199031119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (3 7) = minus11989611988811199042
11987211988811205962119899
119896 (4 1) =1198961199041119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (4 119894) =1198961199041119899
11987211988811205962119899
119894 = 2 3
119896 (4 7) = minus11989611988811199042
11987211988811205962119899
119896 (4 4) =1198961199031119899
1205962119899
(1
119872119901ℎ
+1
1198721198881
+1
1198721199031
)
10 Mathematical Problems in Engineering
119896 (4 119894) =1198961199031119899
1205962119899
(1
1198721198881
+1
1198721199031
) 119894 = 5 6
119896 (4 15) = minus11989611990311199032
11987211990311205962119899
119896 (5 119894) =1198961199041119899
11987211988811205962119899
119894 = 1 3
119896 (5 2) =1198961199041119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (5 119894) =1198961199031119899
1205962119899
(1
1198721198881
+1
1198721199031
) 119894 = 5 6
119896 (5 5) =1198961199031119899
1205962119899
(1
119872119901ℎ
+1
1198721198881
+1
1198721199031
)
119896 (5 7) = minus11989611988811199042
11987211988811205962119899
119896 (5 15) = minus11989611990311199032
11987211990311205962119899
119896 (6 119894) =1198961199041119899
11987211988811205962119899
119894 = 1 2
119896 (6 3) =1198961199041119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (6 119894) =1198961199031119899
1205962119899
(1
1198721198881
+1
1198721199031
) 119894 = 4 5
119896 (6 6) =1198961199031119899
1205962119899
(1
119872119901ℎ
+1
1198721198881
+1
1198721199031
)
119896 (6 7) = minus11989611988811199042
11987211988811205962119899
119896 (6 15) = minus11989611990311199032
11987211990311205962119899
119896 (7 119894) = minus1198961199041119899
11987211988811205962119899
119894 = 1 2 3
119896 (7 119894) = minus1198961199031119899
11987211988811205962119899
119894 = 4 5 6
119896 (7 7) =11989611988811199042
1205962119899
[1
1198721198881
+1
1198721199042
(1199031198881cos1205721199031199042
)
2
]
119896 (7 119894) = minus1198961199042119899
11987211990421205962119899
1199031198881cos1205721199031199042
119894 = 9 10 11
119896 (8 8) =1198961198882
11987211988821205962119899
119896 (8 119894) = minus1198961199042119899
11987211988821205962119899
119894 = 9 10 11
119896 (8 119894) = minus1198961199032119899
11987211988821205962119899
119894 = 12 13 14
119896 (9 7) = minus11989611988811199042
11987211990421205962119899
1199031198881cos1205721199031199042
119896 (9 8) = minus1198961198882
11987211988821205962119899
119896 (9 9) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
+1
119872119901119897
)
119896 (9 119894) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
) 119894 = 10 11
119896 (9 12) =1198961199032119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (9 119894) =1198961199032119899
11987211988821205962119899
119894 = 13 14
119896 (10 7) = minus11989611988811199042
11987211990421205962119899
1199031198881cos1205721199031199042
119896 (10 8) = minus1198961198882
11987211988821205962119899
119896 (10 119894) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
) 119894 = 9 10
119896 (10 10) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
+1
119872119901119897
)
119896 (10 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 14
119896 (10 13) =1198961199032119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (11 7) = minus11989611988811199042
11987211990421205962119899
1199031198881cos1205721199031199042
119896 (11 8) = minus1198961198882
11987211988821205962119899
119896 (11 119894) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
) 119894 = 9 10
119896 (11 11) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
+1
119872119901119897
)
119896 (11 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 13
119896 (11 14) =1198961199032119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (12 8) = minus1198961198882
11987211988821205962119899
Mathematical Problems in Engineering 11
119896 (12 15) =119896119903111990321199031199031
119872119903212059621198991199031199032
119896 (12 9) =1198961199042119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (12 119894) =1198961199042119899
11987211988821205962119899
119894 = 10 11
119896 (12 12) =1198961199032119899
1205962119899
(1
119872119901119897
+1
1198721198882
)
119896 (12 119894) =1198961199032119899
11987211988821205962119899
119894 = 13 14
119896 (13 8) = minus1198961198882
11987211988821205962119899
119896 (13 10) =1198961199042119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (13 119894) =1198961199042119899
11987211988821205962119899
119894 = 9 11
119896 (13 13) =1198961199032119899
1205962119899
(1
119872119901119897
+1
1198721198882
)
119896 (13 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 14
119896 (13 15) =119896119903111990321199031199031
119872119903212059621198991199031199032
119896 (14 8) = minus1198961198882
11987211988821205962119899
119896 (14 11) =1198961199042119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (14 119894) =1198961199042119899
11987211988821205962119899
119894 = 9 10
119896 (14 14) =1198961199032119899
1205962119899
(1
119872119901119897
+1
1198721198882
)
119896 (14 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 13
119896 (14 15) =119896119903111990321199031199031
119872119903212059621198991199031199032
119896 (15 119894) = minus1198961199031119899
11987211990311205962119899
119894 = 4 5 6
119896 (15 119894) =11989611990321198991199031199031
119872119903211990311990321205962119899
119894 = 12 13 14
119896 (15 15) =11989611990311199032
1205962119899
(1
1198721199031
+1199031199031
11987211990321199031199032
)
(A2)
The elements of k119898not listed previously are taken as zeros
The matrix C is in the similar form of k119898and no longer is
listed in detail here
Notations
HBM Harmonic balance method119887 Half of clearance (backlash)119896 Gear mesh stiffness119903 Ring gear119892 Discontinuous displacement function119868 Polar mass moment of inertia119894 Transmission ratio119888 Carrier119898 Actual mass119905 Dimensional time119906 Actual equivalent transverse displacement in
the direction of pressure line119880 Relative equivalent transverse displacement
in the direction of pressure line119904 Sun gear119899119901 Number of planet
T Torque120579 Angular displacement119862 Damping coefficient119885 Number of gear119903 Base cycle radius119872 Equivalent mass119905 Nondimensional time120572 Pressure angle
Acknowledgments
Thiswork is supported by theNational Natural Science Foun-dation of China (no 51175299) Shandong Province NaturalScience Foundation of China (ZR2010EM012) and ShandongUniversity Independent Innovation Foundation ofChina (no2012TS048)
References
[1] F Cunliffe J D Smith and D B Welbourn ldquoDynamic toothloads in epicyclic gearsrdquo Transactions of the ASME Journal ofEngineering for Industry vol 96 no 2 pp 578ndash584 1974
[2] M Botman ldquoEpicyclic gear vibrationsrdquo Transactions of theASME Journal of Engineering for Industry vol 98 no 3 pp 811ndash815 1976
[3] G Antony ldquoGear vibration-investigation of the dynamic behav-ior of one stage epicyclic gearsrdquo AGMA Technical Paper 88-FTM-12 1988
[4] A Kahraman ldquoFree torsional vibration characteristics of com-pound planetary gear setsrdquo Mechanism and Machine Theoryvol 36 no 8 pp 953ndash971 2001
[5] T Sun and H Hu ldquoNonlinear dynamics of a planetary gearsystem with multiple clearancesrdquo Mechanism and MachineTheory vol 38 no 12 pp 1371ndash1390 2003
[6] A Al-shyyab and A Kahraman ldquoA non-linear dynamic modelfor planetary gear setsrdquo Proceedings of the Institution ofMechan-ical Engineers K Journal of Multi-body Dynamics vol 221 no 4pp 567ndash576 2007
12 Mathematical Problems in Engineering
[7] A Al-Shyyab K Alwidyan A Jawarneh and H Tlilan ldquoNon-linear dynamic behaviour of compound planetary gear trainsmodel formulation and semi-analytical solutionrdquo Proceedings ofthe Institution of Mechanical Engineers K Journal of Multi-bodyDynamics vol 223 no 3 pp 199ndash210 2009
[8] T Zeng Bao Z Yi Fang and L Wei Zhong ldquoMany stage helicalgear train systemoptimal designwhich takes the dynamic prop-erties as an objective functionrdquo Chinese Journal of MechanicalEngineering vol 30 no 5 pp 66ndash75 1994 (Chinese)
[9] X Guan Wei Y Jia Jun X LaiYuan et al ldquoDynamic optimaldesign on planetary driverrdquoMechanical Science and Technologyvol 17 no 2 pp 209ndash217 1998 (Chinese)
[10] G W Blankenship and A Kahraman ldquoSteady state forcedresponse of a mechanical oscillator with combined parametricexcitation and clearance type non-linearityrdquo Journal of Soundand Vibration vol 185 no 5 pp 743ndash765 1995
[11] HGuang andWGuiCheng ldquoDynamics optimization design ofclosed epicyclic gear trainsrdquoMechanical Science and Technologyvol 23 no 9 pp 1131ndash1134 2004 (Chinese)
[12] D-T Qin X-G Gu J-H Wang and J-G Liu ldquoDynamicanalysis and optimization of gear trains in amegawatt level windturbinerdquo Journal of Chongqing University vol 32 no 4 pp 408ndash414 2009 (Chinese)
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
+1
1205962119899
3
sum119894=1
[
[
1198961199042119899119892 (1198801199042119901119897119894)+1198961199032119899119892 (1198801199032119901119897119894)
1198721198882
+1198961199032119899119892 (1198801199032119901119897119894)
1198721199032
]
]
=minus119879out
119872119903211990311990321198871205962119899
(119899 = 1 2 3)
(7f)
11990311199032+1198621199031119903211990311199032
119872119903111990321205962119899
+1
1205962119899
3
sum119894=1
(11986211990321198991199031199031
11987211990321199031199032
1199032119901119897119894
minus1198621199031119899
1198721199031
1199031119901ℎ119894
)
+11989611990311199032119892 (11988011990311199032)
119872119903111990321205962119899
+1
1205962119899
3
sum119894=1
(11989611990321198991199031199031119892 (1198801199032119901119897119894)
11987211990321199031199032
minus1198961199031119899119892 (1198801199031119901ℎ119894
)
1198721199031
)
= minus119879out1199031199031
1198721199032119903211990321198871205962119899
(7g)
where1
11987211990411198881
=1
1198721199041
+1
1198721198881
1
11987211988811199031
=1
1198721198881
+1
1198721199031
1
11987211990311199032
=1
1198721199031
+1199031199031
11987211990321199031199032
(8)
Equations (7a)ndash(7g) can be written in matrix form as
U + CU + K119892 (U) = T (9)
where the piecewise-linear backlash function is defined as
119892 [119880119894119895(119905)] =
119880119894119895(119905) minus 119887
119894119895 119880119894119895gt 119887119894119895
0 minus119887119894119895le 119880119894119895le 119887119894119895
119880119894119895(119905) + 119887
119894119895 119880119894119895lt minus119887119894119895
(10)
3 Solution of Dynamic Equations
31 Dynamic Response Using the Numerical IntegrationIn this section the mathematical model will be solvednumerically by the variable step-size Runge-Kutta integrationmethod firstly The parameters of the closed-form planetarygear set shown in Figure 1 are given in Tables 1 and 2 In thiswork the values of the gearmesh damping coefficients119862
119894119895are
assumed to be constants as 001 [11]By resolving the dynamic differential equations of
motions the dynamic responses (displacement and speed) oflow-stage carrier are gained as shown in Figure 3
32The Acquisition of Analytical Solutions In order to estab-lish the optimization mathematical model of the dynamicbehavior of the closed-form planetary gear set it is necessaryto obtain the analytical solutions ofmodel using the harmonicbalancemethod For limiting the number of algebraic balanceequations only the fundamental frequency harmonic of themesh stiffness functions are considered in this case Similarlyexternal torque functions is also considered to be in the formof mesh stiffness functions And then attention is paid to theperiodic vibrations of system under the harmonic excitationThe procedure of solving (7a)ndash(7g) using HBM [5] includessome aspects as follows(1) According to the assumption previously mentioned
the external excitations that represent fundamental frequencypulsations can be written in the form
T = T119898119894+ T119886119894cos (Ω119905 + 120601
119894) (11)
where T119898119894
is the mean component of torque and T119886119894is the
amplitude of the alternating component of the fundamentalfrequency mesh force 120601
119894is the phase angle
(2) According to the harmonic excitations given in(11) the harmonic balance method solution to (7a)ndash(7g) isassumed in the same form
U = U119898119894+ U119886119894cos (Ω119905 + 120601
119894) (12)
whereU119898119894
andU119886119894are the mean and alternating components
of the steady state response respectively and 120601119894is the phase
angle(3) For relative mesh displacements the piecewise-linear
function in (4a)ndash(4h) can be written in a unified form
119892 (119880119894) = 119873
119898119894119880119898119894+ 119873119886119894119880119886119894cos (Ω119905 + 120601
119894) (13)
where
119873119898119894= 1 +
119902119886119894
2119902119898119894
[119866 (120583+) minus 119866 (120583
minus)]
119873119886119894= 1 minus
1
2[119867 (120583
+) minus 119867 (120583
minus)]
(14)
The expressions of 119866 and119867 are given in the Appendix(4) Considering the mean value and the fundamental
harmonic value of periodically time-varying mesh stiffnessin Figure 2 the elements of stiffness matrix K in (9) can bewritten as
119896119894119895= 119896119898119894119895+ 119896119886119894119895
cos (Ω120591 + 120593119894119895) (15)
So the stiffness matrix K is written in terms of two separatematrices for mean stiffness and alternating stiffness as
K = K119898+ ΔK (16)
where
K119898= [119896119898119894119895]119899times119899
ΔK = [119896119886119894119895
cos (Ω120591 + 120593119894119895)]119899times119899
(17)
Mathematical Problems in Engineering 7
Table 1 Geometric parameters of the closed-form planetary gear set
High-speed stage Low-speed stageSun gear Planet gear Ring gear Sun gear Planet gear Ring gear
Number of teeth 16 38 92 16 24 62Module (mm) 3 3Pressure angle (deg) 215∘ 215∘
Modification coefficient 03 012 054 0475 0471 0309Face width (mm) 22 20 20 345 30 32
Table 2 Physical parameters of the closed-form planetary gear set
High-speed stage Low-speed stageSun Planet Ring Carrier Sun Planet Ring Carrier
Inertia (kgsdotmm2) 8854 827 6888372 680079 33959 46292 11021396 94009Rotation radius (mm) 1107 3278 113 5725 2328 3112 113 28Mean mesh stiffness (Nmm) 119870
1199041119899= 1198701199031119899= 21198907 119870
1199042119899= 1198701199032119899= 21198907
Torsional stiffness (Nmm) 11987011988811199042= 21198907 119870
11990311199032= 101198907 119870
1198882= 101198908
Total mass 69 kg
By substituting (9)ndash(14) into (7a)ndash(7g) and balancing the likeharmonic terms the algebraic equations of system can begained
K119898y119898+K1y3
2+K2y4
2minus T119898= 0119899times1
K119898y3+ K1y119898minus Ω2y1minus ΩCy
2minus T1= 0119899times1
K119898y4+ K2y119898minus Ω2y2+ CΩy
1minus T2= 0119899times1
(18)
where y1= 119902
119886119894cos120593119894119899times1
y2= 119902
119886119894sin120593119894119899times1
y3=
119873119886119894119902119886119894cos120593119894119899times1
y4= 119873119886119894119902119886119894sin120593119894119899times1
y119898= 119873119898119894119902119898119894119899times1
T1
= 119879119886119894cos120601119894119899times1
T2
= 119879119886119894sin120601119894119899times1
K1
=
119896119886119894119895
cos120601119894119895119899times1
and K2= 119896119886119894119895
sin120601119894119895119899times1
The matrices k
119898and C are given in the Appendix
4 Optimization of the Transmission System
41 Variables and Objective Function of Optimization Anumber of key design parameters have great influence onthe dynamic characteristics of the gear transmissions sothey can be chosen as design variables such as numberof each gear module gear width and pressure angle Tosimplify optimization process the module of each stage 119898
1
1198982 number of sun gears of each stage 119911
1199041 1199111199042 and pressure
angle of each stage1205721 1205722are chosen as optimization variables
in this study So the recurrence variables vector for thisoptimization procedure can be written as
119909 = [1198981 1198982 1199111199041 1199111199042 1205721 1205722]119879
(19)
The dynamic characteristics standards of the gear trans-mission include maximum dynamic loads dynamic loadfactor stiffness and displacementvelocityacceleration ofvibration each of these standards can be chosen as opti-mization objective Considering that the rotation centerof the planets in low-stage is unfixed and reducing the
total weight of the transmission system simultaneously thedisplacement of rotational vibration of the low-stage carrierand total mass of the gear set are chosen as optimizationobjective According to the basic idea of the multiobjectiveoptimization two optimization objective functions unifiedusing the normalized weighting method [11] can be writtenin form
119891 = 12058211198911+ 12058221198912 (20)
where 1205821and 120582
2are weighting coefficient here 120582
1= 03
and 1205822= 07 [12] 119891
1and 119891
2are the ampler of the rotational
vibration displacement of the low-stage carrier and totalmass of the gear set respectively Due to limited space theexpressions of 119891
1and 119891
2are not given in detail
42 Constraints
(1) Distributing the number of teeth of each gear con-centric conditions adjacent conditions and assemblyconditions
(2) contact fatigue strength and bending fatigue strengthconstraints
119878119867(119894) ge 119878
119867min 119878119865(119894) ge 119878
119865min
119894 = 1199041 1199042 1199031 1199032 119901ℎ 119901119897
(21)
(3) contact ratio constraints
120576119894119895ge 15 119894 = 119904
1 1199042 1199031 1199032 119895 = 119901ℎ 119901119897 (22)
(4) transmission ratio without loop-power conditions
minus32 le 1198941+ 1198942minus 11989411198942le minus30
0 lt1198942minus 11989411198942
1198941+ 1198942minus 11989411198942
lt 1(23)
8 Mathematical Problems in Engineering
Table 3 Parameters of structure after optimization
High-speed stage Low-speed stageSun gear Planet gear Ring gear Sun gear Planet gear Ring gear
Number of teeth 17 40 97 18 23 66Module (mm) 2 3Pressure angle (deg) 20∘ 20∘
Total mass (kg) 635 kg
0 5 10 15 20 25minus5
minus4
minus3
minus2
minus1
0
1
2
3 Displacement of low-stage carrier
Time (s)
Non
dim
ensio
nal d
ispla
cem
ent
(a) Displacement of low-speed stage carrier
0 5 10 15 20 25minus15
minus1
minus05
0
05
1
15
Time (s)
Non
dim
ensio
nal s
peed
Speed of low-stage carrier
(b) Speed of low-speed stage carrier
Figure 3 Response of low-speed stage carrier without optimization
0 5 10 15 20 25minus5
minus4
minus3
minus2
minus1
0
1
2
3Displacement of low-stage carrier
Time (s)
Non
dim
ensio
nal d
ispla
cem
ent
(a) Displacement of low-speed stage carrier
0 5 10 15 20 25minus15
minus1
minus05
0
05
1
15
Time (s)
Non
dim
ensio
nal s
peed
Speed of low-stage carrier
(b) Speed of low-speed stage carrier
Figure 4 Response of low-speed stage carrier after optimization
where
119894119899= minus119885119903119899
119885119904119899
119899 = 1 2 (24)
(5) minimum tooth thickness constraints
119878119886119894ge 04119898
119895 119894 = 119904
1 1199042 1199031 1199032 119901ℎ 119901119897 119895 = 1 2 (25)
5 Results and Discussions
Some more logical parameters of the closed-form planetarygear set are obtained according to optimization constraintsconditions previously mentioned119898
1= 2 119898
2= 3 119885
1199041= 17
1198851199042= 18 120572
1= 1205722= 20∘ Further other parameters of
transmission can be computed as shown in Table 3 Total
Mathematical Problems in Engineering 9
mass of gear set is 635 kg Comparing the results betweenbefore and after the optimization it is clear that transmissionsystem reduces the total mass of 86 and the dynamiccharacteristic significantly improves as well It is also evidentfrom the comparison of Figure 3 with Figure 4 that thedisplacement of each structure significantly reduces at thesame time It is obvious that the scope of the amplitude ofdisplacement of low-stage carrier is minus3 to 3 in Figure 4(a)while that in Figure 3(a) is minus5 to 3
6 Conclusions
Considering the gear backlash time-varying mesh stiffnessand excitation fluctuation and so forth a discrete nonlineardynamic model of a two stages closed-form planetary set wasproposed in this study In order to facilitate the analysis andcomparison of system response between before and after opti-mization nonlinear differential equations of motion of thedynamic model were solved using a Runge-Kutta numericalintegrationmethod For optimization of transmission systemthe analytical solutions were obtainedThe total optimizationobjective function is obtained using the normalized weightsmethod
A case shows that the total mass of transmission systemhas significantly reduced and dynamic characteristic has dis-tinctly improved Effectiveness of the dynamicmodel and thedynamic optimization mathematic model is demonstrated
Appendix
Consider the following
119866 (120583) =
(2
120587)(120583 sinminus1120583 + radic1 minus 1205832) 1003816100381610038161003816120583
1003816100381610038161003816 le 1
10038161003816100381610038161205831003816100381610038161003816
10038161003816100381610038161205831003816100381610038161003816 gt 1
119867 (120583) =
minus1 120583 lt minus1
(2120583
120587)(sinminus1120583 + radic1 minus 1205832) 1003816100381610038161003816120583
1003816100381610038161003816 le 1
1 120583 gt 1
(A1)
The elements of the stiffness matrix k119898are given as follows
119896 (1 1) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
+1
119872119901ℎ
)
119896 (1 119894) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
) 119894 = 2 3
119896 (1 4) =1198961199031119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (1 119894) =1198961199031119899
11987211988811205962119899
119894 = 5 6
119896 (1 7) = minus11989611988811199042
11987211988811205962119899
119896 (2 119894) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
) 119894 = 1 3
119896 (2 7) = minus11989611988811199042
11987211988811205962119899
119896 (2 2) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
+1
119872119901ℎ
)
119896 (2 119894) =1198961199031119899
11987211988811205962119899
119894 = 4 6
119896 (2 5) =1198961199031119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (2 119894) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
) 119894 = 1 3
119896 (2 2) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
+1
119872119901ℎ
)
119896 (2 119894) =1198961199031119899
11987211988811205962119899
119894 = 4 6
119896 (2 5) =1198961199031119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (2 7) = minus11989611988811199042
11987211988811205962119899
119896 (3 119894) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
) 119894 = 1 2
119896 (3 3) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
+1
119872119901ℎ
)
119896 (3 119894) =1198961199031119899
11987211988811205962119899
119894 = 4 5
119896 (3 6) =1198961199031119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (3 7) = minus11989611988811199042
11987211988811205962119899
119896 (4 1) =1198961199041119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (4 119894) =1198961199041119899
11987211988811205962119899
119894 = 2 3
119896 (4 7) = minus11989611988811199042
11987211988811205962119899
119896 (4 4) =1198961199031119899
1205962119899
(1
119872119901ℎ
+1
1198721198881
+1
1198721199031
)
10 Mathematical Problems in Engineering
119896 (4 119894) =1198961199031119899
1205962119899
(1
1198721198881
+1
1198721199031
) 119894 = 5 6
119896 (4 15) = minus11989611990311199032
11987211990311205962119899
119896 (5 119894) =1198961199041119899
11987211988811205962119899
119894 = 1 3
119896 (5 2) =1198961199041119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (5 119894) =1198961199031119899
1205962119899
(1
1198721198881
+1
1198721199031
) 119894 = 5 6
119896 (5 5) =1198961199031119899
1205962119899
(1
119872119901ℎ
+1
1198721198881
+1
1198721199031
)
119896 (5 7) = minus11989611988811199042
11987211988811205962119899
119896 (5 15) = minus11989611990311199032
11987211990311205962119899
119896 (6 119894) =1198961199041119899
11987211988811205962119899
119894 = 1 2
119896 (6 3) =1198961199041119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (6 119894) =1198961199031119899
1205962119899
(1
1198721198881
+1
1198721199031
) 119894 = 4 5
119896 (6 6) =1198961199031119899
1205962119899
(1
119872119901ℎ
+1
1198721198881
+1
1198721199031
)
119896 (6 7) = minus11989611988811199042
11987211988811205962119899
119896 (6 15) = minus11989611990311199032
11987211990311205962119899
119896 (7 119894) = minus1198961199041119899
11987211988811205962119899
119894 = 1 2 3
119896 (7 119894) = minus1198961199031119899
11987211988811205962119899
119894 = 4 5 6
119896 (7 7) =11989611988811199042
1205962119899
[1
1198721198881
+1
1198721199042
(1199031198881cos1205721199031199042
)
2
]
119896 (7 119894) = minus1198961199042119899
11987211990421205962119899
1199031198881cos1205721199031199042
119894 = 9 10 11
119896 (8 8) =1198961198882
11987211988821205962119899
119896 (8 119894) = minus1198961199042119899
11987211988821205962119899
119894 = 9 10 11
119896 (8 119894) = minus1198961199032119899
11987211988821205962119899
119894 = 12 13 14
119896 (9 7) = minus11989611988811199042
11987211990421205962119899
1199031198881cos1205721199031199042
119896 (9 8) = minus1198961198882
11987211988821205962119899
119896 (9 9) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
+1
119872119901119897
)
119896 (9 119894) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
) 119894 = 10 11
119896 (9 12) =1198961199032119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (9 119894) =1198961199032119899
11987211988821205962119899
119894 = 13 14
119896 (10 7) = minus11989611988811199042
11987211990421205962119899
1199031198881cos1205721199031199042
119896 (10 8) = minus1198961198882
11987211988821205962119899
119896 (10 119894) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
) 119894 = 9 10
119896 (10 10) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
+1
119872119901119897
)
119896 (10 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 14
119896 (10 13) =1198961199032119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (11 7) = minus11989611988811199042
11987211990421205962119899
1199031198881cos1205721199031199042
119896 (11 8) = minus1198961198882
11987211988821205962119899
119896 (11 119894) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
) 119894 = 9 10
119896 (11 11) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
+1
119872119901119897
)
119896 (11 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 13
119896 (11 14) =1198961199032119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (12 8) = minus1198961198882
11987211988821205962119899
Mathematical Problems in Engineering 11
119896 (12 15) =119896119903111990321199031199031
119872119903212059621198991199031199032
119896 (12 9) =1198961199042119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (12 119894) =1198961199042119899
11987211988821205962119899
119894 = 10 11
119896 (12 12) =1198961199032119899
1205962119899
(1
119872119901119897
+1
1198721198882
)
119896 (12 119894) =1198961199032119899
11987211988821205962119899
119894 = 13 14
119896 (13 8) = minus1198961198882
11987211988821205962119899
119896 (13 10) =1198961199042119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (13 119894) =1198961199042119899
11987211988821205962119899
119894 = 9 11
119896 (13 13) =1198961199032119899
1205962119899
(1
119872119901119897
+1
1198721198882
)
119896 (13 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 14
119896 (13 15) =119896119903111990321199031199031
119872119903212059621198991199031199032
119896 (14 8) = minus1198961198882
11987211988821205962119899
119896 (14 11) =1198961199042119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (14 119894) =1198961199042119899
11987211988821205962119899
119894 = 9 10
119896 (14 14) =1198961199032119899
1205962119899
(1
119872119901119897
+1
1198721198882
)
119896 (14 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 13
119896 (14 15) =119896119903111990321199031199031
119872119903212059621198991199031199032
119896 (15 119894) = minus1198961199031119899
11987211990311205962119899
119894 = 4 5 6
119896 (15 119894) =11989611990321198991199031199031
119872119903211990311990321205962119899
119894 = 12 13 14
119896 (15 15) =11989611990311199032
1205962119899
(1
1198721199031
+1199031199031
11987211990321199031199032
)
(A2)
The elements of k119898not listed previously are taken as zeros
The matrix C is in the similar form of k119898and no longer is
listed in detail here
Notations
HBM Harmonic balance method119887 Half of clearance (backlash)119896 Gear mesh stiffness119903 Ring gear119892 Discontinuous displacement function119868 Polar mass moment of inertia119894 Transmission ratio119888 Carrier119898 Actual mass119905 Dimensional time119906 Actual equivalent transverse displacement in
the direction of pressure line119880 Relative equivalent transverse displacement
in the direction of pressure line119904 Sun gear119899119901 Number of planet
T Torque120579 Angular displacement119862 Damping coefficient119885 Number of gear119903 Base cycle radius119872 Equivalent mass119905 Nondimensional time120572 Pressure angle
Acknowledgments
Thiswork is supported by theNational Natural Science Foun-dation of China (no 51175299) Shandong Province NaturalScience Foundation of China (ZR2010EM012) and ShandongUniversity Independent Innovation Foundation ofChina (no2012TS048)
References
[1] F Cunliffe J D Smith and D B Welbourn ldquoDynamic toothloads in epicyclic gearsrdquo Transactions of the ASME Journal ofEngineering for Industry vol 96 no 2 pp 578ndash584 1974
[2] M Botman ldquoEpicyclic gear vibrationsrdquo Transactions of theASME Journal of Engineering for Industry vol 98 no 3 pp 811ndash815 1976
[3] G Antony ldquoGear vibration-investigation of the dynamic behav-ior of one stage epicyclic gearsrdquo AGMA Technical Paper 88-FTM-12 1988
[4] A Kahraman ldquoFree torsional vibration characteristics of com-pound planetary gear setsrdquo Mechanism and Machine Theoryvol 36 no 8 pp 953ndash971 2001
[5] T Sun and H Hu ldquoNonlinear dynamics of a planetary gearsystem with multiple clearancesrdquo Mechanism and MachineTheory vol 38 no 12 pp 1371ndash1390 2003
[6] A Al-shyyab and A Kahraman ldquoA non-linear dynamic modelfor planetary gear setsrdquo Proceedings of the Institution ofMechan-ical Engineers K Journal of Multi-body Dynamics vol 221 no 4pp 567ndash576 2007
12 Mathematical Problems in Engineering
[7] A Al-Shyyab K Alwidyan A Jawarneh and H Tlilan ldquoNon-linear dynamic behaviour of compound planetary gear trainsmodel formulation and semi-analytical solutionrdquo Proceedings ofthe Institution of Mechanical Engineers K Journal of Multi-bodyDynamics vol 223 no 3 pp 199ndash210 2009
[8] T Zeng Bao Z Yi Fang and L Wei Zhong ldquoMany stage helicalgear train systemoptimal designwhich takes the dynamic prop-erties as an objective functionrdquo Chinese Journal of MechanicalEngineering vol 30 no 5 pp 66ndash75 1994 (Chinese)
[9] X Guan Wei Y Jia Jun X LaiYuan et al ldquoDynamic optimaldesign on planetary driverrdquoMechanical Science and Technologyvol 17 no 2 pp 209ndash217 1998 (Chinese)
[10] G W Blankenship and A Kahraman ldquoSteady state forcedresponse of a mechanical oscillator with combined parametricexcitation and clearance type non-linearityrdquo Journal of Soundand Vibration vol 185 no 5 pp 743ndash765 1995
[11] HGuang andWGuiCheng ldquoDynamics optimization design ofclosed epicyclic gear trainsrdquoMechanical Science and Technologyvol 23 no 9 pp 1131ndash1134 2004 (Chinese)
[12] D-T Qin X-G Gu J-H Wang and J-G Liu ldquoDynamicanalysis and optimization of gear trains in amegawatt level windturbinerdquo Journal of Chongqing University vol 32 no 4 pp 408ndash414 2009 (Chinese)
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
Table 1 Geometric parameters of the closed-form planetary gear set
High-speed stage Low-speed stageSun gear Planet gear Ring gear Sun gear Planet gear Ring gear
Number of teeth 16 38 92 16 24 62Module (mm) 3 3Pressure angle (deg) 215∘ 215∘
Modification coefficient 03 012 054 0475 0471 0309Face width (mm) 22 20 20 345 30 32
Table 2 Physical parameters of the closed-form planetary gear set
High-speed stage Low-speed stageSun Planet Ring Carrier Sun Planet Ring Carrier
Inertia (kgsdotmm2) 8854 827 6888372 680079 33959 46292 11021396 94009Rotation radius (mm) 1107 3278 113 5725 2328 3112 113 28Mean mesh stiffness (Nmm) 119870
1199041119899= 1198701199031119899= 21198907 119870
1199042119899= 1198701199032119899= 21198907
Torsional stiffness (Nmm) 11987011988811199042= 21198907 119870
11990311199032= 101198907 119870
1198882= 101198908
Total mass 69 kg
By substituting (9)ndash(14) into (7a)ndash(7g) and balancing the likeharmonic terms the algebraic equations of system can begained
K119898y119898+K1y3
2+K2y4
2minus T119898= 0119899times1
K119898y3+ K1y119898minus Ω2y1minus ΩCy
2minus T1= 0119899times1
K119898y4+ K2y119898minus Ω2y2+ CΩy
1minus T2= 0119899times1
(18)
where y1= 119902
119886119894cos120593119894119899times1
y2= 119902
119886119894sin120593119894119899times1
y3=
119873119886119894119902119886119894cos120593119894119899times1
y4= 119873119886119894119902119886119894sin120593119894119899times1
y119898= 119873119898119894119902119898119894119899times1
T1
= 119879119886119894cos120601119894119899times1
T2
= 119879119886119894sin120601119894119899times1
K1
=
119896119886119894119895
cos120601119894119895119899times1
and K2= 119896119886119894119895
sin120601119894119895119899times1
The matrices k
119898and C are given in the Appendix
4 Optimization of the Transmission System
41 Variables and Objective Function of Optimization Anumber of key design parameters have great influence onthe dynamic characteristics of the gear transmissions sothey can be chosen as design variables such as numberof each gear module gear width and pressure angle Tosimplify optimization process the module of each stage 119898
1
1198982 number of sun gears of each stage 119911
1199041 1199111199042 and pressure
angle of each stage1205721 1205722are chosen as optimization variables
in this study So the recurrence variables vector for thisoptimization procedure can be written as
119909 = [1198981 1198982 1199111199041 1199111199042 1205721 1205722]119879
(19)
The dynamic characteristics standards of the gear trans-mission include maximum dynamic loads dynamic loadfactor stiffness and displacementvelocityacceleration ofvibration each of these standards can be chosen as opti-mization objective Considering that the rotation centerof the planets in low-stage is unfixed and reducing the
total weight of the transmission system simultaneously thedisplacement of rotational vibration of the low-stage carrierand total mass of the gear set are chosen as optimizationobjective According to the basic idea of the multiobjectiveoptimization two optimization objective functions unifiedusing the normalized weighting method [11] can be writtenin form
119891 = 12058211198911+ 12058221198912 (20)
where 1205821and 120582
2are weighting coefficient here 120582
1= 03
and 1205822= 07 [12] 119891
1and 119891
2are the ampler of the rotational
vibration displacement of the low-stage carrier and totalmass of the gear set respectively Due to limited space theexpressions of 119891
1and 119891
2are not given in detail
42 Constraints
(1) Distributing the number of teeth of each gear con-centric conditions adjacent conditions and assemblyconditions
(2) contact fatigue strength and bending fatigue strengthconstraints
119878119867(119894) ge 119878
119867min 119878119865(119894) ge 119878
119865min
119894 = 1199041 1199042 1199031 1199032 119901ℎ 119901119897
(21)
(3) contact ratio constraints
120576119894119895ge 15 119894 = 119904
1 1199042 1199031 1199032 119895 = 119901ℎ 119901119897 (22)
(4) transmission ratio without loop-power conditions
minus32 le 1198941+ 1198942minus 11989411198942le minus30
0 lt1198942minus 11989411198942
1198941+ 1198942minus 11989411198942
lt 1(23)
8 Mathematical Problems in Engineering
Table 3 Parameters of structure after optimization
High-speed stage Low-speed stageSun gear Planet gear Ring gear Sun gear Planet gear Ring gear
Number of teeth 17 40 97 18 23 66Module (mm) 2 3Pressure angle (deg) 20∘ 20∘
Total mass (kg) 635 kg
0 5 10 15 20 25minus5
minus4
minus3
minus2
minus1
0
1
2
3 Displacement of low-stage carrier
Time (s)
Non
dim
ensio
nal d
ispla
cem
ent
(a) Displacement of low-speed stage carrier
0 5 10 15 20 25minus15
minus1
minus05
0
05
1
15
Time (s)
Non
dim
ensio
nal s
peed
Speed of low-stage carrier
(b) Speed of low-speed stage carrier
Figure 3 Response of low-speed stage carrier without optimization
0 5 10 15 20 25minus5
minus4
minus3
minus2
minus1
0
1
2
3Displacement of low-stage carrier
Time (s)
Non
dim
ensio
nal d
ispla
cem
ent
(a) Displacement of low-speed stage carrier
0 5 10 15 20 25minus15
minus1
minus05
0
05
1
15
Time (s)
Non
dim
ensio
nal s
peed
Speed of low-stage carrier
(b) Speed of low-speed stage carrier
Figure 4 Response of low-speed stage carrier after optimization
where
119894119899= minus119885119903119899
119885119904119899
119899 = 1 2 (24)
(5) minimum tooth thickness constraints
119878119886119894ge 04119898
119895 119894 = 119904
1 1199042 1199031 1199032 119901ℎ 119901119897 119895 = 1 2 (25)
5 Results and Discussions
Some more logical parameters of the closed-form planetarygear set are obtained according to optimization constraintsconditions previously mentioned119898
1= 2 119898
2= 3 119885
1199041= 17
1198851199042= 18 120572
1= 1205722= 20∘ Further other parameters of
transmission can be computed as shown in Table 3 Total
Mathematical Problems in Engineering 9
mass of gear set is 635 kg Comparing the results betweenbefore and after the optimization it is clear that transmissionsystem reduces the total mass of 86 and the dynamiccharacteristic significantly improves as well It is also evidentfrom the comparison of Figure 3 with Figure 4 that thedisplacement of each structure significantly reduces at thesame time It is obvious that the scope of the amplitude ofdisplacement of low-stage carrier is minus3 to 3 in Figure 4(a)while that in Figure 3(a) is minus5 to 3
6 Conclusions
Considering the gear backlash time-varying mesh stiffnessand excitation fluctuation and so forth a discrete nonlineardynamic model of a two stages closed-form planetary set wasproposed in this study In order to facilitate the analysis andcomparison of system response between before and after opti-mization nonlinear differential equations of motion of thedynamic model were solved using a Runge-Kutta numericalintegrationmethod For optimization of transmission systemthe analytical solutions were obtainedThe total optimizationobjective function is obtained using the normalized weightsmethod
A case shows that the total mass of transmission systemhas significantly reduced and dynamic characteristic has dis-tinctly improved Effectiveness of the dynamicmodel and thedynamic optimization mathematic model is demonstrated
Appendix
Consider the following
119866 (120583) =
(2
120587)(120583 sinminus1120583 + radic1 minus 1205832) 1003816100381610038161003816120583
1003816100381610038161003816 le 1
10038161003816100381610038161205831003816100381610038161003816
10038161003816100381610038161205831003816100381610038161003816 gt 1
119867 (120583) =
minus1 120583 lt minus1
(2120583
120587)(sinminus1120583 + radic1 minus 1205832) 1003816100381610038161003816120583
1003816100381610038161003816 le 1
1 120583 gt 1
(A1)
The elements of the stiffness matrix k119898are given as follows
119896 (1 1) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
+1
119872119901ℎ
)
119896 (1 119894) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
) 119894 = 2 3
119896 (1 4) =1198961199031119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (1 119894) =1198961199031119899
11987211988811205962119899
119894 = 5 6
119896 (1 7) = minus11989611988811199042
11987211988811205962119899
119896 (2 119894) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
) 119894 = 1 3
119896 (2 7) = minus11989611988811199042
11987211988811205962119899
119896 (2 2) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
+1
119872119901ℎ
)
119896 (2 119894) =1198961199031119899
11987211988811205962119899
119894 = 4 6
119896 (2 5) =1198961199031119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (2 119894) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
) 119894 = 1 3
119896 (2 2) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
+1
119872119901ℎ
)
119896 (2 119894) =1198961199031119899
11987211988811205962119899
119894 = 4 6
119896 (2 5) =1198961199031119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (2 7) = minus11989611988811199042
11987211988811205962119899
119896 (3 119894) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
) 119894 = 1 2
119896 (3 3) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
+1
119872119901ℎ
)
119896 (3 119894) =1198961199031119899
11987211988811205962119899
119894 = 4 5
119896 (3 6) =1198961199031119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (3 7) = minus11989611988811199042
11987211988811205962119899
119896 (4 1) =1198961199041119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (4 119894) =1198961199041119899
11987211988811205962119899
119894 = 2 3
119896 (4 7) = minus11989611988811199042
11987211988811205962119899
119896 (4 4) =1198961199031119899
1205962119899
(1
119872119901ℎ
+1
1198721198881
+1
1198721199031
)
10 Mathematical Problems in Engineering
119896 (4 119894) =1198961199031119899
1205962119899
(1
1198721198881
+1
1198721199031
) 119894 = 5 6
119896 (4 15) = minus11989611990311199032
11987211990311205962119899
119896 (5 119894) =1198961199041119899
11987211988811205962119899
119894 = 1 3
119896 (5 2) =1198961199041119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (5 119894) =1198961199031119899
1205962119899
(1
1198721198881
+1
1198721199031
) 119894 = 5 6
119896 (5 5) =1198961199031119899
1205962119899
(1
119872119901ℎ
+1
1198721198881
+1
1198721199031
)
119896 (5 7) = minus11989611988811199042
11987211988811205962119899
119896 (5 15) = minus11989611990311199032
11987211990311205962119899
119896 (6 119894) =1198961199041119899
11987211988811205962119899
119894 = 1 2
119896 (6 3) =1198961199041119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (6 119894) =1198961199031119899
1205962119899
(1
1198721198881
+1
1198721199031
) 119894 = 4 5
119896 (6 6) =1198961199031119899
1205962119899
(1
119872119901ℎ
+1
1198721198881
+1
1198721199031
)
119896 (6 7) = minus11989611988811199042
11987211988811205962119899
119896 (6 15) = minus11989611990311199032
11987211990311205962119899
119896 (7 119894) = minus1198961199041119899
11987211988811205962119899
119894 = 1 2 3
119896 (7 119894) = minus1198961199031119899
11987211988811205962119899
119894 = 4 5 6
119896 (7 7) =11989611988811199042
1205962119899
[1
1198721198881
+1
1198721199042
(1199031198881cos1205721199031199042
)
2
]
119896 (7 119894) = minus1198961199042119899
11987211990421205962119899
1199031198881cos1205721199031199042
119894 = 9 10 11
119896 (8 8) =1198961198882
11987211988821205962119899
119896 (8 119894) = minus1198961199042119899
11987211988821205962119899
119894 = 9 10 11
119896 (8 119894) = minus1198961199032119899
11987211988821205962119899
119894 = 12 13 14
119896 (9 7) = minus11989611988811199042
11987211990421205962119899
1199031198881cos1205721199031199042
119896 (9 8) = minus1198961198882
11987211988821205962119899
119896 (9 9) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
+1
119872119901119897
)
119896 (9 119894) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
) 119894 = 10 11
119896 (9 12) =1198961199032119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (9 119894) =1198961199032119899
11987211988821205962119899
119894 = 13 14
119896 (10 7) = minus11989611988811199042
11987211990421205962119899
1199031198881cos1205721199031199042
119896 (10 8) = minus1198961198882
11987211988821205962119899
119896 (10 119894) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
) 119894 = 9 10
119896 (10 10) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
+1
119872119901119897
)
119896 (10 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 14
119896 (10 13) =1198961199032119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (11 7) = minus11989611988811199042
11987211990421205962119899
1199031198881cos1205721199031199042
119896 (11 8) = minus1198961198882
11987211988821205962119899
119896 (11 119894) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
) 119894 = 9 10
119896 (11 11) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
+1
119872119901119897
)
119896 (11 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 13
119896 (11 14) =1198961199032119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (12 8) = minus1198961198882
11987211988821205962119899
Mathematical Problems in Engineering 11
119896 (12 15) =119896119903111990321199031199031
119872119903212059621198991199031199032
119896 (12 9) =1198961199042119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (12 119894) =1198961199042119899
11987211988821205962119899
119894 = 10 11
119896 (12 12) =1198961199032119899
1205962119899
(1
119872119901119897
+1
1198721198882
)
119896 (12 119894) =1198961199032119899
11987211988821205962119899
119894 = 13 14
119896 (13 8) = minus1198961198882
11987211988821205962119899
119896 (13 10) =1198961199042119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (13 119894) =1198961199042119899
11987211988821205962119899
119894 = 9 11
119896 (13 13) =1198961199032119899
1205962119899
(1
119872119901119897
+1
1198721198882
)
119896 (13 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 14
119896 (13 15) =119896119903111990321199031199031
119872119903212059621198991199031199032
119896 (14 8) = minus1198961198882
11987211988821205962119899
119896 (14 11) =1198961199042119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (14 119894) =1198961199042119899
11987211988821205962119899
119894 = 9 10
119896 (14 14) =1198961199032119899
1205962119899
(1
119872119901119897
+1
1198721198882
)
119896 (14 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 13
119896 (14 15) =119896119903111990321199031199031
119872119903212059621198991199031199032
119896 (15 119894) = minus1198961199031119899
11987211990311205962119899
119894 = 4 5 6
119896 (15 119894) =11989611990321198991199031199031
119872119903211990311990321205962119899
119894 = 12 13 14
119896 (15 15) =11989611990311199032
1205962119899
(1
1198721199031
+1199031199031
11987211990321199031199032
)
(A2)
The elements of k119898not listed previously are taken as zeros
The matrix C is in the similar form of k119898and no longer is
listed in detail here
Notations
HBM Harmonic balance method119887 Half of clearance (backlash)119896 Gear mesh stiffness119903 Ring gear119892 Discontinuous displacement function119868 Polar mass moment of inertia119894 Transmission ratio119888 Carrier119898 Actual mass119905 Dimensional time119906 Actual equivalent transverse displacement in
the direction of pressure line119880 Relative equivalent transverse displacement
in the direction of pressure line119904 Sun gear119899119901 Number of planet
T Torque120579 Angular displacement119862 Damping coefficient119885 Number of gear119903 Base cycle radius119872 Equivalent mass119905 Nondimensional time120572 Pressure angle
Acknowledgments
Thiswork is supported by theNational Natural Science Foun-dation of China (no 51175299) Shandong Province NaturalScience Foundation of China (ZR2010EM012) and ShandongUniversity Independent Innovation Foundation ofChina (no2012TS048)
References
[1] F Cunliffe J D Smith and D B Welbourn ldquoDynamic toothloads in epicyclic gearsrdquo Transactions of the ASME Journal ofEngineering for Industry vol 96 no 2 pp 578ndash584 1974
[2] M Botman ldquoEpicyclic gear vibrationsrdquo Transactions of theASME Journal of Engineering for Industry vol 98 no 3 pp 811ndash815 1976
[3] G Antony ldquoGear vibration-investigation of the dynamic behav-ior of one stage epicyclic gearsrdquo AGMA Technical Paper 88-FTM-12 1988
[4] A Kahraman ldquoFree torsional vibration characteristics of com-pound planetary gear setsrdquo Mechanism and Machine Theoryvol 36 no 8 pp 953ndash971 2001
[5] T Sun and H Hu ldquoNonlinear dynamics of a planetary gearsystem with multiple clearancesrdquo Mechanism and MachineTheory vol 38 no 12 pp 1371ndash1390 2003
[6] A Al-shyyab and A Kahraman ldquoA non-linear dynamic modelfor planetary gear setsrdquo Proceedings of the Institution ofMechan-ical Engineers K Journal of Multi-body Dynamics vol 221 no 4pp 567ndash576 2007
12 Mathematical Problems in Engineering
[7] A Al-Shyyab K Alwidyan A Jawarneh and H Tlilan ldquoNon-linear dynamic behaviour of compound planetary gear trainsmodel formulation and semi-analytical solutionrdquo Proceedings ofthe Institution of Mechanical Engineers K Journal of Multi-bodyDynamics vol 223 no 3 pp 199ndash210 2009
[8] T Zeng Bao Z Yi Fang and L Wei Zhong ldquoMany stage helicalgear train systemoptimal designwhich takes the dynamic prop-erties as an objective functionrdquo Chinese Journal of MechanicalEngineering vol 30 no 5 pp 66ndash75 1994 (Chinese)
[9] X Guan Wei Y Jia Jun X LaiYuan et al ldquoDynamic optimaldesign on planetary driverrdquoMechanical Science and Technologyvol 17 no 2 pp 209ndash217 1998 (Chinese)
[10] G W Blankenship and A Kahraman ldquoSteady state forcedresponse of a mechanical oscillator with combined parametricexcitation and clearance type non-linearityrdquo Journal of Soundand Vibration vol 185 no 5 pp 743ndash765 1995
[11] HGuang andWGuiCheng ldquoDynamics optimization design ofclosed epicyclic gear trainsrdquoMechanical Science and Technologyvol 23 no 9 pp 1131ndash1134 2004 (Chinese)
[12] D-T Qin X-G Gu J-H Wang and J-G Liu ldquoDynamicanalysis and optimization of gear trains in amegawatt level windturbinerdquo Journal of Chongqing University vol 32 no 4 pp 408ndash414 2009 (Chinese)
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
Table 3 Parameters of structure after optimization
High-speed stage Low-speed stageSun gear Planet gear Ring gear Sun gear Planet gear Ring gear
Number of teeth 17 40 97 18 23 66Module (mm) 2 3Pressure angle (deg) 20∘ 20∘
Total mass (kg) 635 kg
0 5 10 15 20 25minus5
minus4
minus3
minus2
minus1
0
1
2
3 Displacement of low-stage carrier
Time (s)
Non
dim
ensio
nal d
ispla
cem
ent
(a) Displacement of low-speed stage carrier
0 5 10 15 20 25minus15
minus1
minus05
0
05
1
15
Time (s)
Non
dim
ensio
nal s
peed
Speed of low-stage carrier
(b) Speed of low-speed stage carrier
Figure 3 Response of low-speed stage carrier without optimization
0 5 10 15 20 25minus5
minus4
minus3
minus2
minus1
0
1
2
3Displacement of low-stage carrier
Time (s)
Non
dim
ensio
nal d
ispla
cem
ent
(a) Displacement of low-speed stage carrier
0 5 10 15 20 25minus15
minus1
minus05
0
05
1
15
Time (s)
Non
dim
ensio
nal s
peed
Speed of low-stage carrier
(b) Speed of low-speed stage carrier
Figure 4 Response of low-speed stage carrier after optimization
where
119894119899= minus119885119903119899
119885119904119899
119899 = 1 2 (24)
(5) minimum tooth thickness constraints
119878119886119894ge 04119898
119895 119894 = 119904
1 1199042 1199031 1199032 119901ℎ 119901119897 119895 = 1 2 (25)
5 Results and Discussions
Some more logical parameters of the closed-form planetarygear set are obtained according to optimization constraintsconditions previously mentioned119898
1= 2 119898
2= 3 119885
1199041= 17
1198851199042= 18 120572
1= 1205722= 20∘ Further other parameters of
transmission can be computed as shown in Table 3 Total
Mathematical Problems in Engineering 9
mass of gear set is 635 kg Comparing the results betweenbefore and after the optimization it is clear that transmissionsystem reduces the total mass of 86 and the dynamiccharacteristic significantly improves as well It is also evidentfrom the comparison of Figure 3 with Figure 4 that thedisplacement of each structure significantly reduces at thesame time It is obvious that the scope of the amplitude ofdisplacement of low-stage carrier is minus3 to 3 in Figure 4(a)while that in Figure 3(a) is minus5 to 3
6 Conclusions
Considering the gear backlash time-varying mesh stiffnessand excitation fluctuation and so forth a discrete nonlineardynamic model of a two stages closed-form planetary set wasproposed in this study In order to facilitate the analysis andcomparison of system response between before and after opti-mization nonlinear differential equations of motion of thedynamic model were solved using a Runge-Kutta numericalintegrationmethod For optimization of transmission systemthe analytical solutions were obtainedThe total optimizationobjective function is obtained using the normalized weightsmethod
A case shows that the total mass of transmission systemhas significantly reduced and dynamic characteristic has dis-tinctly improved Effectiveness of the dynamicmodel and thedynamic optimization mathematic model is demonstrated
Appendix
Consider the following
119866 (120583) =
(2
120587)(120583 sinminus1120583 + radic1 minus 1205832) 1003816100381610038161003816120583
1003816100381610038161003816 le 1
10038161003816100381610038161205831003816100381610038161003816
10038161003816100381610038161205831003816100381610038161003816 gt 1
119867 (120583) =
minus1 120583 lt minus1
(2120583
120587)(sinminus1120583 + radic1 minus 1205832) 1003816100381610038161003816120583
1003816100381610038161003816 le 1
1 120583 gt 1
(A1)
The elements of the stiffness matrix k119898are given as follows
119896 (1 1) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
+1
119872119901ℎ
)
119896 (1 119894) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
) 119894 = 2 3
119896 (1 4) =1198961199031119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (1 119894) =1198961199031119899
11987211988811205962119899
119894 = 5 6
119896 (1 7) = minus11989611988811199042
11987211988811205962119899
119896 (2 119894) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
) 119894 = 1 3
119896 (2 7) = minus11989611988811199042
11987211988811205962119899
119896 (2 2) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
+1
119872119901ℎ
)
119896 (2 119894) =1198961199031119899
11987211988811205962119899
119894 = 4 6
119896 (2 5) =1198961199031119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (2 119894) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
) 119894 = 1 3
119896 (2 2) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
+1
119872119901ℎ
)
119896 (2 119894) =1198961199031119899
11987211988811205962119899
119894 = 4 6
119896 (2 5) =1198961199031119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (2 7) = minus11989611988811199042
11987211988811205962119899
119896 (3 119894) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
) 119894 = 1 2
119896 (3 3) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
+1
119872119901ℎ
)
119896 (3 119894) =1198961199031119899
11987211988811205962119899
119894 = 4 5
119896 (3 6) =1198961199031119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (3 7) = minus11989611988811199042
11987211988811205962119899
119896 (4 1) =1198961199041119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (4 119894) =1198961199041119899
11987211988811205962119899
119894 = 2 3
119896 (4 7) = minus11989611988811199042
11987211988811205962119899
119896 (4 4) =1198961199031119899
1205962119899
(1
119872119901ℎ
+1
1198721198881
+1
1198721199031
)
10 Mathematical Problems in Engineering
119896 (4 119894) =1198961199031119899
1205962119899
(1
1198721198881
+1
1198721199031
) 119894 = 5 6
119896 (4 15) = minus11989611990311199032
11987211990311205962119899
119896 (5 119894) =1198961199041119899
11987211988811205962119899
119894 = 1 3
119896 (5 2) =1198961199041119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (5 119894) =1198961199031119899
1205962119899
(1
1198721198881
+1
1198721199031
) 119894 = 5 6
119896 (5 5) =1198961199031119899
1205962119899
(1
119872119901ℎ
+1
1198721198881
+1
1198721199031
)
119896 (5 7) = minus11989611988811199042
11987211988811205962119899
119896 (5 15) = minus11989611990311199032
11987211990311205962119899
119896 (6 119894) =1198961199041119899
11987211988811205962119899
119894 = 1 2
119896 (6 3) =1198961199041119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (6 119894) =1198961199031119899
1205962119899
(1
1198721198881
+1
1198721199031
) 119894 = 4 5
119896 (6 6) =1198961199031119899
1205962119899
(1
119872119901ℎ
+1
1198721198881
+1
1198721199031
)
119896 (6 7) = minus11989611988811199042
11987211988811205962119899
119896 (6 15) = minus11989611990311199032
11987211990311205962119899
119896 (7 119894) = minus1198961199041119899
11987211988811205962119899
119894 = 1 2 3
119896 (7 119894) = minus1198961199031119899
11987211988811205962119899
119894 = 4 5 6
119896 (7 7) =11989611988811199042
1205962119899
[1
1198721198881
+1
1198721199042
(1199031198881cos1205721199031199042
)
2
]
119896 (7 119894) = minus1198961199042119899
11987211990421205962119899
1199031198881cos1205721199031199042
119894 = 9 10 11
119896 (8 8) =1198961198882
11987211988821205962119899
119896 (8 119894) = minus1198961199042119899
11987211988821205962119899
119894 = 9 10 11
119896 (8 119894) = minus1198961199032119899
11987211988821205962119899
119894 = 12 13 14
119896 (9 7) = minus11989611988811199042
11987211990421205962119899
1199031198881cos1205721199031199042
119896 (9 8) = minus1198961198882
11987211988821205962119899
119896 (9 9) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
+1
119872119901119897
)
119896 (9 119894) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
) 119894 = 10 11
119896 (9 12) =1198961199032119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (9 119894) =1198961199032119899
11987211988821205962119899
119894 = 13 14
119896 (10 7) = minus11989611988811199042
11987211990421205962119899
1199031198881cos1205721199031199042
119896 (10 8) = minus1198961198882
11987211988821205962119899
119896 (10 119894) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
) 119894 = 9 10
119896 (10 10) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
+1
119872119901119897
)
119896 (10 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 14
119896 (10 13) =1198961199032119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (11 7) = minus11989611988811199042
11987211990421205962119899
1199031198881cos1205721199031199042
119896 (11 8) = minus1198961198882
11987211988821205962119899
119896 (11 119894) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
) 119894 = 9 10
119896 (11 11) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
+1
119872119901119897
)
119896 (11 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 13
119896 (11 14) =1198961199032119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (12 8) = minus1198961198882
11987211988821205962119899
Mathematical Problems in Engineering 11
119896 (12 15) =119896119903111990321199031199031
119872119903212059621198991199031199032
119896 (12 9) =1198961199042119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (12 119894) =1198961199042119899
11987211988821205962119899
119894 = 10 11
119896 (12 12) =1198961199032119899
1205962119899
(1
119872119901119897
+1
1198721198882
)
119896 (12 119894) =1198961199032119899
11987211988821205962119899
119894 = 13 14
119896 (13 8) = minus1198961198882
11987211988821205962119899
119896 (13 10) =1198961199042119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (13 119894) =1198961199042119899
11987211988821205962119899
119894 = 9 11
119896 (13 13) =1198961199032119899
1205962119899
(1
119872119901119897
+1
1198721198882
)
119896 (13 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 14
119896 (13 15) =119896119903111990321199031199031
119872119903212059621198991199031199032
119896 (14 8) = minus1198961198882
11987211988821205962119899
119896 (14 11) =1198961199042119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (14 119894) =1198961199042119899
11987211988821205962119899
119894 = 9 10
119896 (14 14) =1198961199032119899
1205962119899
(1
119872119901119897
+1
1198721198882
)
119896 (14 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 13
119896 (14 15) =119896119903111990321199031199031
119872119903212059621198991199031199032
119896 (15 119894) = minus1198961199031119899
11987211990311205962119899
119894 = 4 5 6
119896 (15 119894) =11989611990321198991199031199031
119872119903211990311990321205962119899
119894 = 12 13 14
119896 (15 15) =11989611990311199032
1205962119899
(1
1198721199031
+1199031199031
11987211990321199031199032
)
(A2)
The elements of k119898not listed previously are taken as zeros
The matrix C is in the similar form of k119898and no longer is
listed in detail here
Notations
HBM Harmonic balance method119887 Half of clearance (backlash)119896 Gear mesh stiffness119903 Ring gear119892 Discontinuous displacement function119868 Polar mass moment of inertia119894 Transmission ratio119888 Carrier119898 Actual mass119905 Dimensional time119906 Actual equivalent transverse displacement in
the direction of pressure line119880 Relative equivalent transverse displacement
in the direction of pressure line119904 Sun gear119899119901 Number of planet
T Torque120579 Angular displacement119862 Damping coefficient119885 Number of gear119903 Base cycle radius119872 Equivalent mass119905 Nondimensional time120572 Pressure angle
Acknowledgments
Thiswork is supported by theNational Natural Science Foun-dation of China (no 51175299) Shandong Province NaturalScience Foundation of China (ZR2010EM012) and ShandongUniversity Independent Innovation Foundation ofChina (no2012TS048)
References
[1] F Cunliffe J D Smith and D B Welbourn ldquoDynamic toothloads in epicyclic gearsrdquo Transactions of the ASME Journal ofEngineering for Industry vol 96 no 2 pp 578ndash584 1974
[2] M Botman ldquoEpicyclic gear vibrationsrdquo Transactions of theASME Journal of Engineering for Industry vol 98 no 3 pp 811ndash815 1976
[3] G Antony ldquoGear vibration-investigation of the dynamic behav-ior of one stage epicyclic gearsrdquo AGMA Technical Paper 88-FTM-12 1988
[4] A Kahraman ldquoFree torsional vibration characteristics of com-pound planetary gear setsrdquo Mechanism and Machine Theoryvol 36 no 8 pp 953ndash971 2001
[5] T Sun and H Hu ldquoNonlinear dynamics of a planetary gearsystem with multiple clearancesrdquo Mechanism and MachineTheory vol 38 no 12 pp 1371ndash1390 2003
[6] A Al-shyyab and A Kahraman ldquoA non-linear dynamic modelfor planetary gear setsrdquo Proceedings of the Institution ofMechan-ical Engineers K Journal of Multi-body Dynamics vol 221 no 4pp 567ndash576 2007
12 Mathematical Problems in Engineering
[7] A Al-Shyyab K Alwidyan A Jawarneh and H Tlilan ldquoNon-linear dynamic behaviour of compound planetary gear trainsmodel formulation and semi-analytical solutionrdquo Proceedings ofthe Institution of Mechanical Engineers K Journal of Multi-bodyDynamics vol 223 no 3 pp 199ndash210 2009
[8] T Zeng Bao Z Yi Fang and L Wei Zhong ldquoMany stage helicalgear train systemoptimal designwhich takes the dynamic prop-erties as an objective functionrdquo Chinese Journal of MechanicalEngineering vol 30 no 5 pp 66ndash75 1994 (Chinese)
[9] X Guan Wei Y Jia Jun X LaiYuan et al ldquoDynamic optimaldesign on planetary driverrdquoMechanical Science and Technologyvol 17 no 2 pp 209ndash217 1998 (Chinese)
[10] G W Blankenship and A Kahraman ldquoSteady state forcedresponse of a mechanical oscillator with combined parametricexcitation and clearance type non-linearityrdquo Journal of Soundand Vibration vol 185 no 5 pp 743ndash765 1995
[11] HGuang andWGuiCheng ldquoDynamics optimization design ofclosed epicyclic gear trainsrdquoMechanical Science and Technologyvol 23 no 9 pp 1131ndash1134 2004 (Chinese)
[12] D-T Qin X-G Gu J-H Wang and J-G Liu ldquoDynamicanalysis and optimization of gear trains in amegawatt level windturbinerdquo Journal of Chongqing University vol 32 no 4 pp 408ndash414 2009 (Chinese)
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 9
mass of gear set is 635 kg Comparing the results betweenbefore and after the optimization it is clear that transmissionsystem reduces the total mass of 86 and the dynamiccharacteristic significantly improves as well It is also evidentfrom the comparison of Figure 3 with Figure 4 that thedisplacement of each structure significantly reduces at thesame time It is obvious that the scope of the amplitude ofdisplacement of low-stage carrier is minus3 to 3 in Figure 4(a)while that in Figure 3(a) is minus5 to 3
6 Conclusions
Considering the gear backlash time-varying mesh stiffnessand excitation fluctuation and so forth a discrete nonlineardynamic model of a two stages closed-form planetary set wasproposed in this study In order to facilitate the analysis andcomparison of system response between before and after opti-mization nonlinear differential equations of motion of thedynamic model were solved using a Runge-Kutta numericalintegrationmethod For optimization of transmission systemthe analytical solutions were obtainedThe total optimizationobjective function is obtained using the normalized weightsmethod
A case shows that the total mass of transmission systemhas significantly reduced and dynamic characteristic has dis-tinctly improved Effectiveness of the dynamicmodel and thedynamic optimization mathematic model is demonstrated
Appendix
Consider the following
119866 (120583) =
(2
120587)(120583 sinminus1120583 + radic1 minus 1205832) 1003816100381610038161003816120583
1003816100381610038161003816 le 1
10038161003816100381610038161205831003816100381610038161003816
10038161003816100381610038161205831003816100381610038161003816 gt 1
119867 (120583) =
minus1 120583 lt minus1
(2120583
120587)(sinminus1120583 + radic1 minus 1205832) 1003816100381610038161003816120583
1003816100381610038161003816 le 1
1 120583 gt 1
(A1)
The elements of the stiffness matrix k119898are given as follows
119896 (1 1) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
+1
119872119901ℎ
)
119896 (1 119894) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
) 119894 = 2 3
119896 (1 4) =1198961199031119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (1 119894) =1198961199031119899
11987211988811205962119899
119894 = 5 6
119896 (1 7) = minus11989611988811199042
11987211988811205962119899
119896 (2 119894) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
) 119894 = 1 3
119896 (2 7) = minus11989611988811199042
11987211988811205962119899
119896 (2 2) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
+1
119872119901ℎ
)
119896 (2 119894) =1198961199031119899
11987211988811205962119899
119894 = 4 6
119896 (2 5) =1198961199031119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (2 119894) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
) 119894 = 1 3
119896 (2 2) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
+1
119872119901ℎ
)
119896 (2 119894) =1198961199031119899
11987211988811205962119899
119894 = 4 6
119896 (2 5) =1198961199031119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (2 7) = minus11989611988811199042
11987211988811205962119899
119896 (3 119894) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
) 119894 = 1 2
119896 (3 3) =1198961199041119899
1205962119899
(1
1198721199041
+1
1198721198881
+1
119872119901ℎ
)
119896 (3 119894) =1198961199031119899
11987211988811205962119899
119894 = 4 5
119896 (3 6) =1198961199031119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (3 7) = minus11989611988811199042
11987211988811205962119899
119896 (4 1) =1198961199041119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (4 119894) =1198961199041119899
11987211988811205962119899
119894 = 2 3
119896 (4 7) = minus11989611988811199042
11987211988811205962119899
119896 (4 4) =1198961199031119899
1205962119899
(1
119872119901ℎ
+1
1198721198881
+1
1198721199031
)
10 Mathematical Problems in Engineering
119896 (4 119894) =1198961199031119899
1205962119899
(1
1198721198881
+1
1198721199031
) 119894 = 5 6
119896 (4 15) = minus11989611990311199032
11987211990311205962119899
119896 (5 119894) =1198961199041119899
11987211988811205962119899
119894 = 1 3
119896 (5 2) =1198961199041119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (5 119894) =1198961199031119899
1205962119899
(1
1198721198881
+1
1198721199031
) 119894 = 5 6
119896 (5 5) =1198961199031119899
1205962119899
(1
119872119901ℎ
+1
1198721198881
+1
1198721199031
)
119896 (5 7) = minus11989611988811199042
11987211988811205962119899
119896 (5 15) = minus11989611990311199032
11987211990311205962119899
119896 (6 119894) =1198961199041119899
11987211988811205962119899
119894 = 1 2
119896 (6 3) =1198961199041119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (6 119894) =1198961199031119899
1205962119899
(1
1198721198881
+1
1198721199031
) 119894 = 4 5
119896 (6 6) =1198961199031119899
1205962119899
(1
119872119901ℎ
+1
1198721198881
+1
1198721199031
)
119896 (6 7) = minus11989611988811199042
11987211988811205962119899
119896 (6 15) = minus11989611990311199032
11987211990311205962119899
119896 (7 119894) = minus1198961199041119899
11987211988811205962119899
119894 = 1 2 3
119896 (7 119894) = minus1198961199031119899
11987211988811205962119899
119894 = 4 5 6
119896 (7 7) =11989611988811199042
1205962119899
[1
1198721198881
+1
1198721199042
(1199031198881cos1205721199031199042
)
2
]
119896 (7 119894) = minus1198961199042119899
11987211990421205962119899
1199031198881cos1205721199031199042
119894 = 9 10 11
119896 (8 8) =1198961198882
11987211988821205962119899
119896 (8 119894) = minus1198961199042119899
11987211988821205962119899
119894 = 9 10 11
119896 (8 119894) = minus1198961199032119899
11987211988821205962119899
119894 = 12 13 14
119896 (9 7) = minus11989611988811199042
11987211990421205962119899
1199031198881cos1205721199031199042
119896 (9 8) = minus1198961198882
11987211988821205962119899
119896 (9 9) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
+1
119872119901119897
)
119896 (9 119894) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
) 119894 = 10 11
119896 (9 12) =1198961199032119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (9 119894) =1198961199032119899
11987211988821205962119899
119894 = 13 14
119896 (10 7) = minus11989611988811199042
11987211990421205962119899
1199031198881cos1205721199031199042
119896 (10 8) = minus1198961198882
11987211988821205962119899
119896 (10 119894) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
) 119894 = 9 10
119896 (10 10) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
+1
119872119901119897
)
119896 (10 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 14
119896 (10 13) =1198961199032119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (11 7) = minus11989611988811199042
11987211990421205962119899
1199031198881cos1205721199031199042
119896 (11 8) = minus1198961198882
11987211988821205962119899
119896 (11 119894) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
) 119894 = 9 10
119896 (11 11) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
+1
119872119901119897
)
119896 (11 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 13
119896 (11 14) =1198961199032119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (12 8) = minus1198961198882
11987211988821205962119899
Mathematical Problems in Engineering 11
119896 (12 15) =119896119903111990321199031199031
119872119903212059621198991199031199032
119896 (12 9) =1198961199042119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (12 119894) =1198961199042119899
11987211988821205962119899
119894 = 10 11
119896 (12 12) =1198961199032119899
1205962119899
(1
119872119901119897
+1
1198721198882
)
119896 (12 119894) =1198961199032119899
11987211988821205962119899
119894 = 13 14
119896 (13 8) = minus1198961198882
11987211988821205962119899
119896 (13 10) =1198961199042119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (13 119894) =1198961199042119899
11987211988821205962119899
119894 = 9 11
119896 (13 13) =1198961199032119899
1205962119899
(1
119872119901119897
+1
1198721198882
)
119896 (13 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 14
119896 (13 15) =119896119903111990321199031199031
119872119903212059621198991199031199032
119896 (14 8) = minus1198961198882
11987211988821205962119899
119896 (14 11) =1198961199042119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (14 119894) =1198961199042119899
11987211988821205962119899
119894 = 9 10
119896 (14 14) =1198961199032119899
1205962119899
(1
119872119901119897
+1
1198721198882
)
119896 (14 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 13
119896 (14 15) =119896119903111990321199031199031
119872119903212059621198991199031199032
119896 (15 119894) = minus1198961199031119899
11987211990311205962119899
119894 = 4 5 6
119896 (15 119894) =11989611990321198991199031199031
119872119903211990311990321205962119899
119894 = 12 13 14
119896 (15 15) =11989611990311199032
1205962119899
(1
1198721199031
+1199031199031
11987211990321199031199032
)
(A2)
The elements of k119898not listed previously are taken as zeros
The matrix C is in the similar form of k119898and no longer is
listed in detail here
Notations
HBM Harmonic balance method119887 Half of clearance (backlash)119896 Gear mesh stiffness119903 Ring gear119892 Discontinuous displacement function119868 Polar mass moment of inertia119894 Transmission ratio119888 Carrier119898 Actual mass119905 Dimensional time119906 Actual equivalent transverse displacement in
the direction of pressure line119880 Relative equivalent transverse displacement
in the direction of pressure line119904 Sun gear119899119901 Number of planet
T Torque120579 Angular displacement119862 Damping coefficient119885 Number of gear119903 Base cycle radius119872 Equivalent mass119905 Nondimensional time120572 Pressure angle
Acknowledgments
Thiswork is supported by theNational Natural Science Foun-dation of China (no 51175299) Shandong Province NaturalScience Foundation of China (ZR2010EM012) and ShandongUniversity Independent Innovation Foundation ofChina (no2012TS048)
References
[1] F Cunliffe J D Smith and D B Welbourn ldquoDynamic toothloads in epicyclic gearsrdquo Transactions of the ASME Journal ofEngineering for Industry vol 96 no 2 pp 578ndash584 1974
[2] M Botman ldquoEpicyclic gear vibrationsrdquo Transactions of theASME Journal of Engineering for Industry vol 98 no 3 pp 811ndash815 1976
[3] G Antony ldquoGear vibration-investigation of the dynamic behav-ior of one stage epicyclic gearsrdquo AGMA Technical Paper 88-FTM-12 1988
[4] A Kahraman ldquoFree torsional vibration characteristics of com-pound planetary gear setsrdquo Mechanism and Machine Theoryvol 36 no 8 pp 953ndash971 2001
[5] T Sun and H Hu ldquoNonlinear dynamics of a planetary gearsystem with multiple clearancesrdquo Mechanism and MachineTheory vol 38 no 12 pp 1371ndash1390 2003
[6] A Al-shyyab and A Kahraman ldquoA non-linear dynamic modelfor planetary gear setsrdquo Proceedings of the Institution ofMechan-ical Engineers K Journal of Multi-body Dynamics vol 221 no 4pp 567ndash576 2007
12 Mathematical Problems in Engineering
[7] A Al-Shyyab K Alwidyan A Jawarneh and H Tlilan ldquoNon-linear dynamic behaviour of compound planetary gear trainsmodel formulation and semi-analytical solutionrdquo Proceedings ofthe Institution of Mechanical Engineers K Journal of Multi-bodyDynamics vol 223 no 3 pp 199ndash210 2009
[8] T Zeng Bao Z Yi Fang and L Wei Zhong ldquoMany stage helicalgear train systemoptimal designwhich takes the dynamic prop-erties as an objective functionrdquo Chinese Journal of MechanicalEngineering vol 30 no 5 pp 66ndash75 1994 (Chinese)
[9] X Guan Wei Y Jia Jun X LaiYuan et al ldquoDynamic optimaldesign on planetary driverrdquoMechanical Science and Technologyvol 17 no 2 pp 209ndash217 1998 (Chinese)
[10] G W Blankenship and A Kahraman ldquoSteady state forcedresponse of a mechanical oscillator with combined parametricexcitation and clearance type non-linearityrdquo Journal of Soundand Vibration vol 185 no 5 pp 743ndash765 1995
[11] HGuang andWGuiCheng ldquoDynamics optimization design ofclosed epicyclic gear trainsrdquoMechanical Science and Technologyvol 23 no 9 pp 1131ndash1134 2004 (Chinese)
[12] D-T Qin X-G Gu J-H Wang and J-G Liu ldquoDynamicanalysis and optimization of gear trains in amegawatt level windturbinerdquo Journal of Chongqing University vol 32 no 4 pp 408ndash414 2009 (Chinese)
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

10 Mathematical Problems in Engineering
119896 (4 119894) =1198961199031119899
1205962119899
(1
1198721198881
+1
1198721199031
) 119894 = 5 6
119896 (4 15) = minus11989611990311199032
11987211990311205962119899
119896 (5 119894) =1198961199041119899
11987211988811205962119899
119894 = 1 3
119896 (5 2) =1198961199041119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (5 119894) =1198961199031119899
1205962119899
(1
1198721198881
+1
1198721199031
) 119894 = 5 6
119896 (5 5) =1198961199031119899
1205962119899
(1
119872119901ℎ
+1
1198721198881
+1
1198721199031
)
119896 (5 7) = minus11989611988811199042
11987211988811205962119899
119896 (5 15) = minus11989611990311199032
11987211990311205962119899
119896 (6 119894) =1198961199041119899
11987211988811205962119899
119894 = 1 2
119896 (6 3) =1198961199041119899
1205962119899
(1
1198721198881
minus1
119872119901ℎ
)
119896 (6 119894) =1198961199031119899
1205962119899
(1
1198721198881
+1
1198721199031
) 119894 = 4 5
119896 (6 6) =1198961199031119899
1205962119899
(1
119872119901ℎ
+1
1198721198881
+1
1198721199031
)
119896 (6 7) = minus11989611988811199042
11987211988811205962119899
119896 (6 15) = minus11989611990311199032
11987211990311205962119899
119896 (7 119894) = minus1198961199041119899
11987211988811205962119899
119894 = 1 2 3
119896 (7 119894) = minus1198961199031119899
11987211988811205962119899
119894 = 4 5 6
119896 (7 7) =11989611988811199042
1205962119899
[1
1198721198881
+1
1198721199042
(1199031198881cos1205721199031199042
)
2
]
119896 (7 119894) = minus1198961199042119899
11987211990421205962119899
1199031198881cos1205721199031199042
119894 = 9 10 11
119896 (8 8) =1198961198882
11987211988821205962119899
119896 (8 119894) = minus1198961199042119899
11987211988821205962119899
119894 = 9 10 11
119896 (8 119894) = minus1198961199032119899
11987211988821205962119899
119894 = 12 13 14
119896 (9 7) = minus11989611988811199042
11987211990421205962119899
1199031198881cos1205721199031199042
119896 (9 8) = minus1198961198882
11987211988821205962119899
119896 (9 9) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
+1
119872119901119897
)
119896 (9 119894) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
) 119894 = 10 11
119896 (9 12) =1198961199032119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (9 119894) =1198961199032119899
11987211988821205962119899
119894 = 13 14
119896 (10 7) = minus11989611988811199042
11987211990421205962119899
1199031198881cos1205721199031199042
119896 (10 8) = minus1198961198882
11987211988821205962119899
119896 (10 119894) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
) 119894 = 9 10
119896 (10 10) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
+1
119872119901119897
)
119896 (10 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 14
119896 (10 13) =1198961199032119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (11 7) = minus11989611988811199042
11987211990421205962119899
1199031198881cos1205721199031199042
119896 (11 8) = minus1198961198882
11987211988821205962119899
119896 (11 119894) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
) 119894 = 9 10
119896 (11 11) =1198961199042119899
1205962119899
(1
1198721199042
+1
1198721198882
+1
119872119901119897
)
119896 (11 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 13
119896 (11 14) =1198961199032119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (12 8) = minus1198961198882
11987211988821205962119899
Mathematical Problems in Engineering 11
119896 (12 15) =119896119903111990321199031199031
119872119903212059621198991199031199032
119896 (12 9) =1198961199042119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (12 119894) =1198961199042119899
11987211988821205962119899
119894 = 10 11
119896 (12 12) =1198961199032119899
1205962119899
(1
119872119901119897
+1
1198721198882
)
119896 (12 119894) =1198961199032119899
11987211988821205962119899
119894 = 13 14
119896 (13 8) = minus1198961198882
11987211988821205962119899
119896 (13 10) =1198961199042119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (13 119894) =1198961199042119899
11987211988821205962119899
119894 = 9 11
119896 (13 13) =1198961199032119899
1205962119899
(1
119872119901119897
+1
1198721198882
)
119896 (13 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 14
119896 (13 15) =119896119903111990321199031199031
119872119903212059621198991199031199032
119896 (14 8) = minus1198961198882
11987211988821205962119899
119896 (14 11) =1198961199042119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (14 119894) =1198961199042119899
11987211988821205962119899
119894 = 9 10
119896 (14 14) =1198961199032119899
1205962119899
(1
119872119901119897
+1
1198721198882
)
119896 (14 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 13
119896 (14 15) =119896119903111990321199031199031
119872119903212059621198991199031199032
119896 (15 119894) = minus1198961199031119899
11987211990311205962119899
119894 = 4 5 6
119896 (15 119894) =11989611990321198991199031199031
119872119903211990311990321205962119899
119894 = 12 13 14
119896 (15 15) =11989611990311199032
1205962119899
(1
1198721199031
+1199031199031
11987211990321199031199032
)
(A2)
The elements of k119898not listed previously are taken as zeros
The matrix C is in the similar form of k119898and no longer is
listed in detail here
Notations
HBM Harmonic balance method119887 Half of clearance (backlash)119896 Gear mesh stiffness119903 Ring gear119892 Discontinuous displacement function119868 Polar mass moment of inertia119894 Transmission ratio119888 Carrier119898 Actual mass119905 Dimensional time119906 Actual equivalent transverse displacement in
the direction of pressure line119880 Relative equivalent transverse displacement
in the direction of pressure line119904 Sun gear119899119901 Number of planet
T Torque120579 Angular displacement119862 Damping coefficient119885 Number of gear119903 Base cycle radius119872 Equivalent mass119905 Nondimensional time120572 Pressure angle
Acknowledgments
Thiswork is supported by theNational Natural Science Foun-dation of China (no 51175299) Shandong Province NaturalScience Foundation of China (ZR2010EM012) and ShandongUniversity Independent Innovation Foundation ofChina (no2012TS048)
References
[1] F Cunliffe J D Smith and D B Welbourn ldquoDynamic toothloads in epicyclic gearsrdquo Transactions of the ASME Journal ofEngineering for Industry vol 96 no 2 pp 578ndash584 1974
[2] M Botman ldquoEpicyclic gear vibrationsrdquo Transactions of theASME Journal of Engineering for Industry vol 98 no 3 pp 811ndash815 1976
[3] G Antony ldquoGear vibration-investigation of the dynamic behav-ior of one stage epicyclic gearsrdquo AGMA Technical Paper 88-FTM-12 1988
[4] A Kahraman ldquoFree torsional vibration characteristics of com-pound planetary gear setsrdquo Mechanism and Machine Theoryvol 36 no 8 pp 953ndash971 2001
[5] T Sun and H Hu ldquoNonlinear dynamics of a planetary gearsystem with multiple clearancesrdquo Mechanism and MachineTheory vol 38 no 12 pp 1371ndash1390 2003
[6] A Al-shyyab and A Kahraman ldquoA non-linear dynamic modelfor planetary gear setsrdquo Proceedings of the Institution ofMechan-ical Engineers K Journal of Multi-body Dynamics vol 221 no 4pp 567ndash576 2007
12 Mathematical Problems in Engineering
[7] A Al-Shyyab K Alwidyan A Jawarneh and H Tlilan ldquoNon-linear dynamic behaviour of compound planetary gear trainsmodel formulation and semi-analytical solutionrdquo Proceedings ofthe Institution of Mechanical Engineers K Journal of Multi-bodyDynamics vol 223 no 3 pp 199ndash210 2009
[8] T Zeng Bao Z Yi Fang and L Wei Zhong ldquoMany stage helicalgear train systemoptimal designwhich takes the dynamic prop-erties as an objective functionrdquo Chinese Journal of MechanicalEngineering vol 30 no 5 pp 66ndash75 1994 (Chinese)
[9] X Guan Wei Y Jia Jun X LaiYuan et al ldquoDynamic optimaldesign on planetary driverrdquoMechanical Science and Technologyvol 17 no 2 pp 209ndash217 1998 (Chinese)
[10] G W Blankenship and A Kahraman ldquoSteady state forcedresponse of a mechanical oscillator with combined parametricexcitation and clearance type non-linearityrdquo Journal of Soundand Vibration vol 185 no 5 pp 743ndash765 1995
[11] HGuang andWGuiCheng ldquoDynamics optimization design ofclosed epicyclic gear trainsrdquoMechanical Science and Technologyvol 23 no 9 pp 1131ndash1134 2004 (Chinese)
[12] D-T Qin X-G Gu J-H Wang and J-G Liu ldquoDynamicanalysis and optimization of gear trains in amegawatt level windturbinerdquo Journal of Chongqing University vol 32 no 4 pp 408ndash414 2009 (Chinese)
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 11
119896 (12 15) =119896119903111990321199031199031
119872119903212059621198991199031199032
119896 (12 9) =1198961199042119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (12 119894) =1198961199042119899
11987211988821205962119899
119894 = 10 11
119896 (12 12) =1198961199032119899
1205962119899
(1
119872119901119897
+1
1198721198882
)
119896 (12 119894) =1198961199032119899
11987211988821205962119899
119894 = 13 14
119896 (13 8) = minus1198961198882
11987211988821205962119899
119896 (13 10) =1198961199042119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (13 119894) =1198961199042119899
11987211988821205962119899
119894 = 9 11
119896 (13 13) =1198961199032119899
1205962119899
(1
119872119901119897
+1
1198721198882
)
119896 (13 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 14
119896 (13 15) =119896119903111990321199031199031
119872119903212059621198991199031199032
119896 (14 8) = minus1198961198882
11987211988821205962119899
119896 (14 11) =1198961199042119899
1205962119899
(1
1198721198882
minus1
119872119901119897
)
119896 (14 119894) =1198961199042119899
11987211988821205962119899
119894 = 9 10
119896 (14 14) =1198961199032119899
1205962119899
(1
119872119901119897
+1
1198721198882
)
119896 (14 119894) =1198961199032119899
11987211988821205962119899
119894 = 12 13
119896 (14 15) =119896119903111990321199031199031
119872119903212059621198991199031199032
119896 (15 119894) = minus1198961199031119899
11987211990311205962119899
119894 = 4 5 6
119896 (15 119894) =11989611990321198991199031199031
119872119903211990311990321205962119899
119894 = 12 13 14
119896 (15 15) =11989611990311199032
1205962119899
(1
1198721199031
+1199031199031
11987211990321199031199032
)
(A2)
The elements of k119898not listed previously are taken as zeros
The matrix C is in the similar form of k119898and no longer is
listed in detail here
Notations
HBM Harmonic balance method119887 Half of clearance (backlash)119896 Gear mesh stiffness119903 Ring gear119892 Discontinuous displacement function119868 Polar mass moment of inertia119894 Transmission ratio119888 Carrier119898 Actual mass119905 Dimensional time119906 Actual equivalent transverse displacement in
the direction of pressure line119880 Relative equivalent transverse displacement
in the direction of pressure line119904 Sun gear119899119901 Number of planet
T Torque120579 Angular displacement119862 Damping coefficient119885 Number of gear119903 Base cycle radius119872 Equivalent mass119905 Nondimensional time120572 Pressure angle
Acknowledgments
Thiswork is supported by theNational Natural Science Foun-dation of China (no 51175299) Shandong Province NaturalScience Foundation of China (ZR2010EM012) and ShandongUniversity Independent Innovation Foundation ofChina (no2012TS048)
References
[1] F Cunliffe J D Smith and D B Welbourn ldquoDynamic toothloads in epicyclic gearsrdquo Transactions of the ASME Journal ofEngineering for Industry vol 96 no 2 pp 578ndash584 1974
[2] M Botman ldquoEpicyclic gear vibrationsrdquo Transactions of theASME Journal of Engineering for Industry vol 98 no 3 pp 811ndash815 1976
[3] G Antony ldquoGear vibration-investigation of the dynamic behav-ior of one stage epicyclic gearsrdquo AGMA Technical Paper 88-FTM-12 1988
[4] A Kahraman ldquoFree torsional vibration characteristics of com-pound planetary gear setsrdquo Mechanism and Machine Theoryvol 36 no 8 pp 953ndash971 2001
[5] T Sun and H Hu ldquoNonlinear dynamics of a planetary gearsystem with multiple clearancesrdquo Mechanism and MachineTheory vol 38 no 12 pp 1371ndash1390 2003
[6] A Al-shyyab and A Kahraman ldquoA non-linear dynamic modelfor planetary gear setsrdquo Proceedings of the Institution ofMechan-ical Engineers K Journal of Multi-body Dynamics vol 221 no 4pp 567ndash576 2007
12 Mathematical Problems in Engineering
[7] A Al-Shyyab K Alwidyan A Jawarneh and H Tlilan ldquoNon-linear dynamic behaviour of compound planetary gear trainsmodel formulation and semi-analytical solutionrdquo Proceedings ofthe Institution of Mechanical Engineers K Journal of Multi-bodyDynamics vol 223 no 3 pp 199ndash210 2009
[8] T Zeng Bao Z Yi Fang and L Wei Zhong ldquoMany stage helicalgear train systemoptimal designwhich takes the dynamic prop-erties as an objective functionrdquo Chinese Journal of MechanicalEngineering vol 30 no 5 pp 66ndash75 1994 (Chinese)
[9] X Guan Wei Y Jia Jun X LaiYuan et al ldquoDynamic optimaldesign on planetary driverrdquoMechanical Science and Technologyvol 17 no 2 pp 209ndash217 1998 (Chinese)
[10] G W Blankenship and A Kahraman ldquoSteady state forcedresponse of a mechanical oscillator with combined parametricexcitation and clearance type non-linearityrdquo Journal of Soundand Vibration vol 185 no 5 pp 743ndash765 1995
[11] HGuang andWGuiCheng ldquoDynamics optimization design ofclosed epicyclic gear trainsrdquoMechanical Science and Technologyvol 23 no 9 pp 1131ndash1134 2004 (Chinese)
[12] D-T Qin X-G Gu J-H Wang and J-G Liu ldquoDynamicanalysis and optimization of gear trains in amegawatt level windturbinerdquo Journal of Chongqing University vol 32 no 4 pp 408ndash414 2009 (Chinese)
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

12 Mathematical Problems in Engineering
[7] A Al-Shyyab K Alwidyan A Jawarneh and H Tlilan ldquoNon-linear dynamic behaviour of compound planetary gear trainsmodel formulation and semi-analytical solutionrdquo Proceedings ofthe Institution of Mechanical Engineers K Journal of Multi-bodyDynamics vol 223 no 3 pp 199ndash210 2009
[8] T Zeng Bao Z Yi Fang and L Wei Zhong ldquoMany stage helicalgear train systemoptimal designwhich takes the dynamic prop-erties as an objective functionrdquo Chinese Journal of MechanicalEngineering vol 30 no 5 pp 66ndash75 1994 (Chinese)
[9] X Guan Wei Y Jia Jun X LaiYuan et al ldquoDynamic optimaldesign on planetary driverrdquoMechanical Science and Technologyvol 17 no 2 pp 209ndash217 1998 (Chinese)
[10] G W Blankenship and A Kahraman ldquoSteady state forcedresponse of a mechanical oscillator with combined parametricexcitation and clearance type non-linearityrdquo Journal of Soundand Vibration vol 185 no 5 pp 743ndash765 1995
[11] HGuang andWGuiCheng ldquoDynamics optimization design ofclosed epicyclic gear trainsrdquoMechanical Science and Technologyvol 23 no 9 pp 1131ndash1134 2004 (Chinese)
[12] D-T Qin X-G Gu J-H Wang and J-G Liu ldquoDynamicanalysis and optimization of gear trains in amegawatt level windturbinerdquo Journal of Chongqing University vol 32 no 4 pp 408ndash414 2009 (Chinese)
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of