Embed Size (px)
Citation preview

Research ArticleSensorless Rotor-Field Oriented Controlled InductionMotor Drive with Particle Swarm Optimization AlgorithmSpeed Controller Design Strategy
Yung-Chang Luo Zhi-Sheng Ke and Ying-Piao Kuo
Department of Electrical Engineering National Chin-Yi University of Technology No 57 Section 2 Zhongshan RoadTaiping District Taichung 41170 Taiwan
Correspondence should be addressed to Yung-Chang Luo luoycncutedutw
Received 26 February 2014 Accepted 16 April 2014 Published 12 June 2014
Academic Editor Her-Terng Yau
Copyright copy 2014 Yung-Chang Luo et al This is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work is properlycited
A sensorless rotor-field oriented control inductionmotor drive with particle swarm optimization algorithm speed controller designstrategy is presented First the rotor-field oriented control scheme of inductionmotor is establishedThen the current-and-voltageserial-model rotor-flux estimator is developed to identify synchronous speed for coordinate transformation Third the rotor-shaftspeed on-line estimation is established applying themodel reference adaptive systemmethod based on estimated rotor-flux Fourththe speed controller of sensorless induction motor drive is designed using particle swarm optimization algorithm Simulation andexperimental results confirm the effectiveness of the proposed approach
1 Introduction
Automatic production facilities require numerous motorsto actuate mechanical load Direct current (DC) motorsdemand frequent maintenance requirements and are unsuit-able for dirty and explosive environments because of thepresence of brushes and commutators Induction motors(IM) possess lower volume and weight are more reliableand efficient and require fewer maintenance requirementsHowever the control of an IMdrive ismore complicated thanaDCmotor drive Since Blaschke presented the field orientedcontrol (FOC) theory of an IM [1] it is through suitablecoordinate transformation that the nonlinear coupling andtime-varying model of IM can be converted as a DC sepa-rately excited motor which field and armature voltage canbe independently controlled and DC like drive performancecan be achieved Nevertheless the implementation of FOCrequires rotor-shaft encoder to detect rotor-shaft positionThis position sensor however reduces the drive reliabilityand is unsuitable for hostile environment Hence the sen-sorless FOC approaches which utilize flux linkage and speedestimationmethods have been extensively used to replace theconventional FOC IM drives [2 3]
Model reference adaptive system (MRAS) method hasbeen applied to estimate rotor-shaft speed for speed sen-sorless IM drive [4] which has a number of advantagesincluding easy implementation simple structure and lowerparameters sensitivity
Particle swarm optimization (PSO) algorithm is oneof the optimum control approaches which possesses rapidconvergence and lesser adjusting parameters and which issuitable for dynamic conditions application [5] Hence thespeed controller design procedure is developed based on PSOalgorithm for sensorless rotor FOC IM drive in this paper
2 Rotor-Field Oriented Control InductionMotor Drive
The stator and rotor voltage state equations of IM in thesynchronous reference coordinate frame are [6]
V119904= 119877119904
119894119904+ 119895120596119890
120582119904+ 119901
120582119904 (1)
0 = 119877119903
119894119903+ 119895120596119904119897
120582119903+ 119901
120582119903 (2)
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2014 Article ID 861462 13 pageshttpdxdoiorg1011552014861462
2 Mathematical Problems in Engineering
where V119904= V119889119904
+ 119895V119902119904is the stator voltage
119894119904= 119894119889119904
+ 119895119894119902119904is the
stator current 120582119904= 120582119889119904
+ 119895120582119902119904is the stator flux linkage
119894119903=
119894119889119903
+ 119895119894119902119903is the rotor current
120582119903= 120582119889119903
+ 119895120582119902119903is the rotor-flux
linkage119877119904is the stator resistance119877
119903is the rotor resistance120596
119890
is the speed of the synchronous reference coordinate frame120596119904119897
= 120596119890minus 120596119903is the slip speed 120596
119903is the electric speed of the
rotor and 119901 = 119889119889119905 is the differential operatorThe stator androtor-flux linkage are given by
120582119904= 119871119904
119894119904+ 119871119898
119894119903 (3)
120582119903= 119871119903
119894119903+ 119871119898
119894119904 (4)
where 119871119904is the stator inductance 119871
119903is the rotor inductance
and 119871119898is the mutual inductance
The developed electromagnetic torque of IM can beobtained by
119879119890=
3119875
4
119871119898
(119894119902119904119894119889119903
minus 119894119889119904119894119902119903) (5)
where 119875 is the pole number of the motor The mechanicalequation of the motor is
119869119898119901120596119903119898
+ 119861119898120596119903119898
+ 119879119871= 119879119890 (6)
where 119869119898is the inertia of the motor 119861
119898is the viscous friction
coefficient 119879119871is the load torque and 120596
119903119898is the mechanical
speed of the motor rotor-shaftThe speed of the motor rotor-shaft can also be expressed as
120596119903119898
=
2
119875
120596119903 (7)
Under the rotor-field oriented control (RFOC) condition set120582119902119903
= 0 in (2) and (4) the estimated slip speed can be derivedas
119904119897
=
119871119898119894119902119904
120591119903120582119889119903
(8)
where 120591119903= 119871119903119877119903is the rotor time constant and the rotor flux
linkage is obtained by
120582119889119903
=
119871119898119894119889119904
1 + 120591119903119904
(9)
where 119904 is the Laplace operator The developed electromag-netic torque of IM under RFOC condition can be derived as
119879119890=
3119875
4
119871119898
119871119903
120582119889119903119894119902119904 (10)
Hence the dynamic equations of IM under RFOC can beexpressed as
119901[
[
119894119889119904
119894119902119904
120582119889119903
]
]
=
[
[
[
[
[
[
[
[
[
[
[
[
minus
119877119904
120590119871119904
minus
1 minus 120590
120590120591119903
120596119890
1 minus 120590
120590119871119898120591119903
minus120596119890
minus
119877119904
120590119871119904
minus
(1 minus 120590) 120596119890
120590119871119898
119871119898
120591119903
0 minus
1
120591119903
]
]
]
]
]
]
]
]
]
]
]
]
[
[
119894119889119904
119894119902119904
120582119889119903
]
]
+
1
120590119871119904
[
[
V119889119904
V119902119904
0
]
]
(11)
where 120590 = 1 minus 119871119898
2
(119871119904119871119903)
Examining (11) as nonlinear and coupling differentialequations the linear control can be acquired by utilizingfeedforward voltage compensation skill The linear outputsignal of the 119902-axis stator current control loop can beexpressed as
V1015840119902119904
= (119870119901119902
+
119870119894119902
119904
) (119894
lowast
119902119904minus 119894119902119904) (12)
where 119894
lowast
119902119904is the command of the 119902-axis stator current and119870
119901119902
and119870119894119902are the proportion and integral gain parameter of the
119902-axis stator current controller respectivelyThe second row of (11) through the decoupling procedure
can be expressed as
119901119894119902119904
= minus
119877119904
120590119871119904
119894119902119904
+ V1015840119902119904 (13)
Comparing (13) with the second row of (11) the decou-pling control of the 119902-axis stator current control loop can beobtained by defining the feedforward voltage compensationas
120590119871119904(120596119890119894119889119904
+
1 minus 120590
120590119871119898
120596119890
120582119889119903) (14)
where 120582119889119903
is the estimated 119889-axis rotor-flux linkage Conse-quently the decoupling voltage equation of the 119902-axis statorcurrent control loop is derived as
Vlowast119902119904
= 120590119871119904(V1015840119902119904
+ 120596119890119894119889119904
+
1 minus 120590
120590119871119898
120596119890
120582119889119903) (15)
where Vlowast119902119904is the command of the 119902-axis stator voltage
Similarly the feedforward voltage compensation of the 119889-axis stator current control loop should be defined as
120590119871119904(minus120596119890119894119902119904
minus
1 minus 120590
120590120591119903119871119898
120582119889119903) (16)
Mathematical Problems in Engineering 3
Kpr
Kir
rarr
iss +
+ +
+
+
+
+
+minus minus
minus
minus
Lm
120591r
1
s
1
s
1
s
Rs
Lr
Lm
120590
1 minus 120590Lm
Voltage model
Current modelr
rarr
ss
rarr120582
s
ri rarr120582
s
rv
rarr120582
s
s
( 1120591r
minus )jr
rarr120582
s
ri
Figure 1 Current-and-voltage serial-model rotor-flux estimator
Then the decoupling control of the 119889-axis stator currentcontrol loop can be acquired and the decoupling voltageequation of the 119889-axis stator current control loop is derivedas
Vlowast119889119904
= 120590119871119904(V1015840119889119904
minus 120596119890119894119902119904
minus
1 minus 120590
120590120591119903119871119898
120582119889119903) (17)
where Vlowast119889119904is the command of the 119889-axis stator voltage and V1015840
119889119904
is the linear output signal of the 119889-axis stator current controlloop
3 Sensorless RFOC Induction Motor Drive
It is necessary to design a speed estimator to replace thefeedback speed in the sensorless RFOC induction motordrive and the speed estimator can be acquired from the rotor-flux estimator
31 Rotor-Flux Estimator The stator current and rotor-fluxlinkage are chosen as state variables in RFOC schemeRewrite (4) as
119894119903=
1
119871119903
(
120582119903minus 119871119898
119894119904) (18)
Then substituting (18) into (3) the stator flux linkage canbe expressed as the function of stator current and rotor-fluxlinkage that is
120582119904= 120590119871119904
119894119904+
119871119898
119871119903
120582119903 (19)
Substituting (19) into (1) the stator voltage equation canbe also expressed by
V119904= (119877119904+ 119895120596119890120590119871119904+ 120590119871119904119901)
119894119904+
119871119898
119871119903
(119895120596119890+ 119901)
120582119903 (20)
Set 120596119890= 0 in (20) the voltage-model rotor-flux estimator can
be derived as
119901
120582
119904
119903V =
119871119903
119871119898
[V119904119904minus (119877119904+ 120590119871119904119901)
119894
119904
119904] (21)
where the superscript ldquo119904rdquo is represented in the stationarycoordinate frame
Then substituting (18) into (2) and setting also 120596119890
= 0the current-model rotor-flux estimator can be derived as
119901
120582
119904
119903119894=
119871119898
120591119903
119894
119904
119904minus (
1
120591119903
minus 119895120596119903)
120582
119904
119903119894 (22)
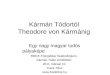
Both voltage-model and current-model rotor-flux esti-mators are open loop estimators The current-model fluxestimator is affected by the rotor resistance variation at lowspeeds which is affected by the rotor resistance and mutualinductance variation at high speeds The voltage-model fluxestimator is affected by the stator resistance variation and themagnitude of stator voltage at low speeds but is less affected bythe parameters variation at high speeds Hence the current-model rotor-flux estimator is applied for low speeds and thevoltage-model rotor-flux estimator is suitable for high speeds[6] In this paper the closed loop type current-and-voltageserial-model rotor-flux estimator is proposed to improve theestimated rotor-flux for entire speeds and that is shown inFigure 1
Applying the estimated 119889-axis rotor-flux linkage 120582
119904
119889119903and
estimated 119902-axis rotor-flux linkage 120582
119904
119902119903 which are acquired
from Figure 1 the synchronous angular speed for coordinatetransformation between the stationary reference frame andsynchronous reference frame can be obtained that is
120579119890= tanminus1(
120582
119904
119902119903
120582
119904
119889119903
) (23)
4 Mathematical Problems in Engineering
Reference model
Adjustable model
120576
Kp +Ki
s
p =Lr
Lm
s
dris
qr minus s
qris
dr
Adaptationmechanism
rarr
iss
rarr
iss
r
r
rarr
ssrarr
ss[ minus (Rs + 120590Lsp) ]
p =Lm
120591rminus ( 1
120591rminus )rarr
iss jr
rarr120582
s
ri
rarr120582
s
ri
rarr120582
s
rv
Figure 2 MRAS rotor speed estimator based on estimated rotor-flux linkage
32 MRAS Rotor Speed On-Line Estimated Scheme Theestimated synchronous angular speed
119890is derived from the
current-and-voltage serial-model rotor-flux estimator andthe estimated rotor speed
119903can be obtained by subtracting
slip speed 119904119897from
119890
According to MRAS speed estimated scheme which isproposed by Schauder [7] the on-lineMRAS estimated rotorelectrical speed is shown in Figure 2 The voltage-modelrotor-flux estimator relying on (21) is chosen as the referencemodel and the current-model rotor-flux estimator relyingon (22) is chosen as the adjustable model then the errorbetween the reference model and the adjustable model canbe expressed as (24) where the error is passed through anadaptation mechanism to estimate the rotor electrical speedin Figure 2 Consider
120576 =120582
119904
119889119903119894
120582
119904
119902119903V minus120582
119904
119902119903119894
120582
119904
119889119903V (24)
33 PSO Speed Controller Design Strategy PSO is originallyproposed by Kennedy and Eberhart [5 8] which is devisedto simulate social behavior The iterative method is appliedin PSO to improve candidate solution (called particles)to acquire prescribed measure of quality These particlesare moved around in the search-space according to theirposition and velocity Each particle possesses individualoptimum searching variable to correct searching directionin the search-space and that is called particle cognition-onlymodel Comparing individual optimum searching variablewith swarm searching variables and then updating swarmsearching variables to correct searching velocity of theparticles is called swarm social-only model Hence theacquired optimum solution of a problem is according to thebest adaptation value in PSO
Conventional PSO algorithm has a disadvantage of localsolution rapid convergence Consequently some modifiedPSO algorithms are presented which include inertia weightmethod tracking dynamic system method and constrictionfactors method [9] The inertia weight method is applied inthis paper which provides PSO with the ability to searchrapidly for optimum solution at initial stage and possesses
Computeadaptation value
of the particle
Number ofiterations
End
No
Initialize positionand velocity of
the particle
Update the bestvalue of individual
particle Pbest
Update the bestvalue of swarmparticles Gbest
Figure 3 The flowchart of PSO algorithm
effective convergence at later stage the position and velocityupdated formulae are described as follows
119881119894(119896 + 1) = 119908 times 119881
119894(119896) + 119862
1times Rand times (119875best minus 119909
119894)
+ 1198622times Rand times (119866best minus 119909
119894)
119909119894(119896 + 1) = 119909
119894(119896) + 119881
119894(119896 + 1)
(25)
where 119881119894(119896) and 119909
119894(119896) are the velocity and position of the
particle respectively 119875best and119866best are the optimum solutionposition of the individual particle and swarm particlesrespectively119908 is theweighting factor119862
1and119862
2are the learn-
ing factors and Rand is the uniform distribution randomvariable over [0 1]
The flowchart of PSO algorithm is shown in Figure 3The first particle is produced randomly and the best
function value can be found by iteration searching in PSOalgorithmThe best solution is obtained by applying 119875best and119866best to compute optimum variable The design procedure ofPSO algorithms is as follows
Step 1 Create initial position and velocity of the particle in119889-dimension space randomly
Step 2 Apply objective function to compute the adaptationvalue of each particle
Step 3 Compare the position of the present particle with thesearching best solution position 119875best of individual particleIf the new searching adaptation value of the present particleis better to 119875best then update 119875best with the new searchingadaptation value of the present particle
Step 4 Compare the position of the present particle with thesearching best solution position 119866best of swarm particles If
Mathematical Problems in Engineering 5
2
P
PSO speedcontroller
Rotorspeed
estimation
r
Tlowaste 4Lr
3PLm120582lowastr
minusminus
minusminus
+ +
+
+
+
+
++120590Ls
120590Ls
e
e
MRAS for 120596eidentification
Rotor-fluxestimator
Inverter
IM
120596lowastrm
rm
ilowastqs
ilowastds
dr
Kpf +Kif
s
120582lowastr
Kpq +Kiq
s
Kpd +Kid
s
s
dr
120596e +1 minus 120590
120590Lm
120596edrids
120596e +1 minus 120590
120590120591rLm
iqs dr
998400qs lowastqs
998400ds lowastds
idsiqs
iasibsics
lowastas
isqs
isds
lowastbslowastcs
2e⟹2s 2s⟹3
2e
⟹
2s
2e
⟹
2s 2s
⟹
3
slowast
qs
slowast
ds
Figure 4 Sensorless RFOC IM drive with PSO algorithm speed controller design
the new searching adaptation value of the present particleis better to 119866best then update 119866best with the new searchingadaptation value of the present particle
Step 5 Utilizing (25) update the position and velocity of theparticle
Step 6 Repeat Step 2simStep 5 until the desired accuracy isobtained
4 Simulation and Experimental
The block diagram of the proposed sensorless RFOC IMdrive with PSO algorithm speed controller is shown inFigure 4 which includes PSO algorithm speed controllerflux controller 119902-axis and 119889-axis stator current controllersvoltage decouple coordinate transformation MRAS basedrotor speed estimator and current-and-voltage serial-modelrotor-flux estimator In this system the speed control loopis designed using PSO algorithm the flux control loop 119889-axis and 119902-axis stator current control loops are designedproportion-integral (PI) type controller based on the root-locus method The Bode plot of the proposed speed controlloop based on PSO design is shown in Figure 5 The pro-portion gain (119870
119901) integral gain (119870
119894) and bandwidth (119861119882)
for four controllers are shown in Table 1 The simulationscheme that was designed utilizing toolbox MatlabSimulinkis shown in Figure 6
To confirm the effectiveness of the proposed sensorlessRFOC IM drive with PSO algorithm speed controller design
10
0
minus10
minus20
minus30
minus400
minus45
minus90
Bode diagram
Frequency (rads)10minus1 100 101 102 103 104
Phas
e (de
g)M
agni
tude
(dB)
System sysFrequency (rads) 109
Magnitude (dB) minus3
Figure 5 Bode plot of the speed control loop based on PSO design
Table 1 Controller parameters and its bandwidth
119870119901
119870119894
BWSpeed controller 09898 14847 109Flux controller 48655 9015 1060119902-axis stator current controller 61651 41099 2970119889-axis stator current controller 89549 44784 3970
a 3-phase 220V 075 kW Δ-connected standard squirrel-cage IM (the parameters of the used IM are listed in Table 2)
6 Mathematical Problems in Engineering
1000
pi30Gain
+minus
+minus
Clock t
t
+
s
120596m
Transfer Fcn
F lowast r
Flux generator
times
divide
Divide
+
s
Transfer Fcn1
Transfer Fcn3
Transfer Fcn2
Transfer Fcn4
4 lowast Lr
3 lowast P lowast Lm +
s
+
s
120596e
120596e
Fedr
Fedr
Fsdr
Fsqr
qe
qe
qe
qe
ids
iqs
fds
fqs
Speed estimation
Series
Fdr
Fqr
120596r
VqsVds
2s to 2e
2s to 2e
isq
isd
Ieqs
Ieqs
Ieds
120596e
Fedr
Ieds
Out1
Out1
Subsystem
Subsystem1
3s to 2s
Isq
Isd
Ias
Ibs
Ics
Le lowast Ls
Le lowast Ls
Gain1
Gain2
Veqs
Veds
VasVsq Vsq
Vbs
Vsd VsdVcs
2e to 2s 2s to 3s
ias
ibs
ics
Te120596m
qm
an
bn
cn
TL
IM
30pirads to rpm
0
Constantqmqm120596rm
120596rm
TeTe
idsiqs
+minus
+minus
+minus
++
120596rm
Kpsmiddots
Kpfmiddots
Kpqmiddots
Kpdmiddots
Kis
Kiq
Kif Kid
Figure 6 Simulation scheme for sensorless RFOC IM drive with PSO algorithm speed controller design
Table 2 The parameters of the used IM
Poles 4119877119904(Ω) 285
119877119903(Ω) 23433
119871119904(H) 01967
119871119903(H) 01967
119871119898(H) 01886
119869119898(Nt-s2m) 0009
119861119898(Nt-s2m2) 000825
is used which serves as the controlled plant for experimenta-tion To confirm the effectiveness of the proposed sensorlessRFOC IM drive with PSO algorithm speed controller designa 3-phase 220V 075 kW Δ-connected standard squirrel-cage IM is used which serves as the controlled plant forexperimentation In a running cycle the speed commandis designed as follows forward direction acceleration from119905 = 0 to 119905 = 1 sec forward direction steady-state operationduring 1 le 119905 le 2 sec forward direction braking operationto reach zero speed in the interval 2 le 119905 le 3 sec reversedirection acceleration from 119905 = 3 to 119905 = 4 sec reversedirection steady-state operation during 4 le 119905 le 5 sec andreverse direction braking operation to reach zero speed inthe interval 5 le 119905 le 6 sec The simulated and measured
responses are shown in Figures 7ndash18 Each figure containsfour responses the actual shaft speed the estimated shaftspeed the rotor-flux linkage locus and the estimated elec-tromagnetic torque The simulated and measured responseswith no-load for reversible steady-state speed commandsplusmn300 rpm plusmn900 rpm and plusmn1800 rpm are shown in Figures7 8 9 10 11 and 12 respectively And the simulated andmeasured responseswith loading 2N-m for reversible steady-state speed commands plusmn300 rpm plusmn900 rpm and plusmn1800 rpmare shown in Figures 13 14 15 16 17 and 18 respectively
Based on the simulated and experimental results fordifferent operational speeds as shown in Figures 7ndash18 theproposed MRAS rotor-shaft speed on-line estimation sen-sorless RFOC IM drive with PSO algorithm speed controllerdesign strategy has shown that the desired performance canbe acquired
5 Conclusions
A sensorless RFOC based on current-and-voltage serial-model rotor-flux estimator with PSO algorithm speed con-troller design strategy has been proposed to control an IMdrive The proposed rotor-flux estimator acquired exactlyestimation flux angle position of coordinate transforma-tion between the synchronous reference coordinate frameand the stationary reference coordinate frame The flux
Mathematical Problems in Engineering 7
400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
Estim
ated
spee
d (r
adm
in) 400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
1
0
minus1
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 7 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 300 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
Estim
ated
spee
d (r
adm
in) 400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
1
0
minus1
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 8 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 300 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
8 Mathematical Problems in Engineering
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
1200
800
400
0
minus400
minus800
minus1200
(a)
0 3 6 9 12
Time (s)
1200
800
400
0
minus400
minus800
minus1200Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
2
0
minus2
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 9 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 900 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
1200
800
400
0
minus400
minus800
minus1200
(a)
0 3 6 9 12
Time (s)
1200
800
400
0
minus400
minus800
minus1200Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
2
0
minus20 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 10 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 900 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
Mathematical Problems in Engineering 9
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 11 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 12 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
10 Mathematical Problems in Engineering
400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
Estim
ated
spee
d (r
adm
in) 400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
3
0
minus3
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 13 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 300 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
Estim
ated
spee
d (r
adm
in) 400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
2
0
minus2
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 14 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 300 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
Mathematical Problems in Engineering 11
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
1200
800
400
0
minus400
minus800
minus1200
(a)
0 3 6 9 12
Time (s)
1200
800
400
0
minus400
minus800
minus1200Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 15 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 900 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
1200
800
400
0
minus400
minus800
minus1200
(a)
0 3 6 9 12
Time (s)
1200
800
400
0
minus400
minus800
minus1200Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
3
0
minus3
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 16 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 900 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
12 Mathematical Problems in Engineering
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
6
0
minus6
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 17 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 18 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
Mathematical Problems in Engineering 13
estimator based MRAS scheme can accurately identifythe rotor-shaft speed on-line The speed controller designstrategy utilizing PSO algorithm obtained superior speedresponse The simulated and experimental responses at dif-ferent reversible steady-state speed commands (plusmn300 rpmplusmn900 rpm and plusmn1800 rpm) confirm the effectiveness of theproposed approach
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] F Blaschke ldquoThe principle of field orientation as applied to thenew transvektor closed-loop control system for rotating-fieldmachinesrdquo Siemens Review vol 39 no 5 pp 217ndash220 1972
[2] H Tajima and Y Hori ldquoSpeed sensorless field-orientation con-trol of the induction machinerdquo IEEE Transactions on IndustryApplications vol 29 no 1 pp 175ndash180 1993
[3] Y C Luo and W X Chen ldquoSensorless stator field orientationcontrolled induction motor drive with fuzzy speed controllerrdquoComputers andMathematics with Applications vol 64 no 5 pp1206ndash1216 2012
[4] Y D Landau Adaptive Control The Model Reference Approachvol 8 Marcel Dekker New York NY USA 1979
[5] J Kennedy and R C Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 IEEE Perth Australia Decem-ber 1995
[6] C H Liu Control of AC Electrical Machines Tunghua TaipeiTaiwan 4th edition 2008 (Chinese)
[7] C Schauder ldquoAdaptive speed identification for vector controlof induction motors without rotational transducersrdquo IEEETransactions on Industry Applications vol 28 no 5 pp 1054ndash1061 1992
[8] R Eberhart and J Kennedy ldquoA New optimizer using particleswarm theoryrdquo in Proceedings of the 6th International Sympo-sium on Micro Machine and Human Science pp 39ndash43 IEEENagoya Japan October 1995
[9] Y Shi and R Eberhart ldquoModified particle swarm optimizerrdquoin Proceedings of the IEEE International Conference on Evolu-tionary Computation (ICEC rsquo98) pp 69ndash73 IEEE AnchorageAlaska USA May 1998
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

2 Mathematical Problems in Engineering
where V119904= V119889119904
+ 119895V119902119904is the stator voltage
119894119904= 119894119889119904
+ 119895119894119902119904is the
stator current 120582119904= 120582119889119904
+ 119895120582119902119904is the stator flux linkage
119894119903=
119894119889119903
+ 119895119894119902119903is the rotor current
120582119903= 120582119889119903
+ 119895120582119902119903is the rotor-flux
linkage119877119904is the stator resistance119877
119903is the rotor resistance120596
119890
is the speed of the synchronous reference coordinate frame120596119904119897
= 120596119890minus 120596119903is the slip speed 120596
119903is the electric speed of the
rotor and 119901 = 119889119889119905 is the differential operatorThe stator androtor-flux linkage are given by
120582119904= 119871119904
119894119904+ 119871119898
119894119903 (3)
120582119903= 119871119903
119894119903+ 119871119898
119894119904 (4)
where 119871119904is the stator inductance 119871
119903is the rotor inductance
and 119871119898is the mutual inductance
The developed electromagnetic torque of IM can beobtained by
119879119890=
3119875
4
119871119898
(119894119902119904119894119889119903
minus 119894119889119904119894119902119903) (5)
where 119875 is the pole number of the motor The mechanicalequation of the motor is
119869119898119901120596119903119898
+ 119861119898120596119903119898
+ 119879119871= 119879119890 (6)
where 119869119898is the inertia of the motor 119861
119898is the viscous friction
coefficient 119879119871is the load torque and 120596
119903119898is the mechanical
speed of the motor rotor-shaftThe speed of the motor rotor-shaft can also be expressed as
120596119903119898
=
2
119875
120596119903 (7)
Under the rotor-field oriented control (RFOC) condition set120582119902119903
= 0 in (2) and (4) the estimated slip speed can be derivedas
119904119897
=
119871119898119894119902119904
120591119903120582119889119903
(8)
where 120591119903= 119871119903119877119903is the rotor time constant and the rotor flux
linkage is obtained by
120582119889119903
=
119871119898119894119889119904
1 + 120591119903119904
(9)
where 119904 is the Laplace operator The developed electromag-netic torque of IM under RFOC condition can be derived as
119879119890=
3119875
4
119871119898
119871119903
120582119889119903119894119902119904 (10)
Hence the dynamic equations of IM under RFOC can beexpressed as
119901[
[
119894119889119904
119894119902119904
120582119889119903
]
]
=
[
[
[
[
[
[
[
[
[
[
[
[
minus
119877119904
120590119871119904
minus
1 minus 120590
120590120591119903
120596119890
1 minus 120590
120590119871119898120591119903
minus120596119890
minus
119877119904
120590119871119904
minus
(1 minus 120590) 120596119890
120590119871119898
119871119898
120591119903
0 minus
1
120591119903
]
]
]
]
]
]
]
]
]
]
]
]
[
[
119894119889119904
119894119902119904
120582119889119903
]
]
+
1
120590119871119904
[
[
V119889119904
V119902119904
0
]
]
(11)
where 120590 = 1 minus 119871119898
2
(119871119904119871119903)
Examining (11) as nonlinear and coupling differentialequations the linear control can be acquired by utilizingfeedforward voltage compensation skill The linear outputsignal of the 119902-axis stator current control loop can beexpressed as
V1015840119902119904
= (119870119901119902
+
119870119894119902
119904
) (119894
lowast
119902119904minus 119894119902119904) (12)
where 119894
lowast
119902119904is the command of the 119902-axis stator current and119870
119901119902
and119870119894119902are the proportion and integral gain parameter of the
119902-axis stator current controller respectivelyThe second row of (11) through the decoupling procedure
can be expressed as
119901119894119902119904
= minus
119877119904
120590119871119904
119894119902119904
+ V1015840119902119904 (13)
Comparing (13) with the second row of (11) the decou-pling control of the 119902-axis stator current control loop can beobtained by defining the feedforward voltage compensationas
120590119871119904(120596119890119894119889119904
+
1 minus 120590
120590119871119898
120596119890
120582119889119903) (14)
where 120582119889119903
is the estimated 119889-axis rotor-flux linkage Conse-quently the decoupling voltage equation of the 119902-axis statorcurrent control loop is derived as
Vlowast119902119904
= 120590119871119904(V1015840119902119904
+ 120596119890119894119889119904
+
1 minus 120590
120590119871119898
120596119890
120582119889119903) (15)
where Vlowast119902119904is the command of the 119902-axis stator voltage
Similarly the feedforward voltage compensation of the 119889-axis stator current control loop should be defined as
120590119871119904(minus120596119890119894119902119904
minus
1 minus 120590
120590120591119903119871119898
120582119889119903) (16)
Mathematical Problems in Engineering 3
Kpr
Kir
rarr
iss +
+ +
+
+
+
+
+minus minus
minus
minus
Lm
120591r
1
s
1
s
1
s
Rs
Lr
Lm
120590
1 minus 120590Lm
Voltage model
Current modelr
rarr
ss
rarr120582
s
ri rarr120582
s
rv
rarr120582
s
s
( 1120591r
minus )jr
rarr120582
s
ri
Figure 1 Current-and-voltage serial-model rotor-flux estimator
Then the decoupling control of the 119889-axis stator currentcontrol loop can be acquired and the decoupling voltageequation of the 119889-axis stator current control loop is derivedas
Vlowast119889119904
= 120590119871119904(V1015840119889119904
minus 120596119890119894119902119904
minus
1 minus 120590
120590120591119903119871119898
120582119889119903) (17)
where Vlowast119889119904is the command of the 119889-axis stator voltage and V1015840
119889119904
is the linear output signal of the 119889-axis stator current controlloop
3 Sensorless RFOC Induction Motor Drive
It is necessary to design a speed estimator to replace thefeedback speed in the sensorless RFOC induction motordrive and the speed estimator can be acquired from the rotor-flux estimator
31 Rotor-Flux Estimator The stator current and rotor-fluxlinkage are chosen as state variables in RFOC schemeRewrite (4) as
119894119903=
1
119871119903
(
120582119903minus 119871119898
119894119904) (18)
Then substituting (18) into (3) the stator flux linkage canbe expressed as the function of stator current and rotor-fluxlinkage that is
120582119904= 120590119871119904
119894119904+
119871119898
119871119903
120582119903 (19)
Substituting (19) into (1) the stator voltage equation canbe also expressed by
V119904= (119877119904+ 119895120596119890120590119871119904+ 120590119871119904119901)
119894119904+
119871119898
119871119903
(119895120596119890+ 119901)
120582119903 (20)
Set 120596119890= 0 in (20) the voltage-model rotor-flux estimator can
be derived as
119901
120582
119904
119903V =
119871119903
119871119898
[V119904119904minus (119877119904+ 120590119871119904119901)
119894
119904
119904] (21)
where the superscript ldquo119904rdquo is represented in the stationarycoordinate frame
Then substituting (18) into (2) and setting also 120596119890
= 0the current-model rotor-flux estimator can be derived as
119901
120582
119904
119903119894=
119871119898
120591119903
119894
119904
119904minus (
1
120591119903
minus 119895120596119903)
120582
119904
119903119894 (22)
Both voltage-model and current-model rotor-flux esti-mators are open loop estimators The current-model fluxestimator is affected by the rotor resistance variation at lowspeeds which is affected by the rotor resistance and mutualinductance variation at high speeds The voltage-model fluxestimator is affected by the stator resistance variation and themagnitude of stator voltage at low speeds but is less affected bythe parameters variation at high speeds Hence the current-model rotor-flux estimator is applied for low speeds and thevoltage-model rotor-flux estimator is suitable for high speeds[6] In this paper the closed loop type current-and-voltageserial-model rotor-flux estimator is proposed to improve theestimated rotor-flux for entire speeds and that is shown inFigure 1
Applying the estimated 119889-axis rotor-flux linkage 120582
119904
119889119903and
estimated 119902-axis rotor-flux linkage 120582
119904
119902119903 which are acquired
from Figure 1 the synchronous angular speed for coordinatetransformation between the stationary reference frame andsynchronous reference frame can be obtained that is
120579119890= tanminus1(
120582
119904
119902119903
120582
119904
119889119903
) (23)
4 Mathematical Problems in Engineering
Reference model
Adjustable model
120576
Kp +Ki
s
p =Lr
Lm
s
dris
qr minus s
qris
dr
Adaptationmechanism
rarr
iss
rarr
iss
r
r
rarr
ssrarr
ss[ minus (Rs + 120590Lsp) ]
p =Lm
120591rminus ( 1
120591rminus )rarr
iss jr
rarr120582
s
ri
rarr120582
s
ri
rarr120582
s
rv
Figure 2 MRAS rotor speed estimator based on estimated rotor-flux linkage
32 MRAS Rotor Speed On-Line Estimated Scheme Theestimated synchronous angular speed
119890is derived from the
current-and-voltage serial-model rotor-flux estimator andthe estimated rotor speed
119903can be obtained by subtracting
slip speed 119904119897from
119890
According to MRAS speed estimated scheme which isproposed by Schauder [7] the on-lineMRAS estimated rotorelectrical speed is shown in Figure 2 The voltage-modelrotor-flux estimator relying on (21) is chosen as the referencemodel and the current-model rotor-flux estimator relyingon (22) is chosen as the adjustable model then the errorbetween the reference model and the adjustable model canbe expressed as (24) where the error is passed through anadaptation mechanism to estimate the rotor electrical speedin Figure 2 Consider
120576 =120582
119904
119889119903119894
120582
119904
119902119903V minus120582
119904
119902119903119894
120582
119904
119889119903V (24)
33 PSO Speed Controller Design Strategy PSO is originallyproposed by Kennedy and Eberhart [5 8] which is devisedto simulate social behavior The iterative method is appliedin PSO to improve candidate solution (called particles)to acquire prescribed measure of quality These particlesare moved around in the search-space according to theirposition and velocity Each particle possesses individualoptimum searching variable to correct searching directionin the search-space and that is called particle cognition-onlymodel Comparing individual optimum searching variablewith swarm searching variables and then updating swarmsearching variables to correct searching velocity of theparticles is called swarm social-only model Hence theacquired optimum solution of a problem is according to thebest adaptation value in PSO
Conventional PSO algorithm has a disadvantage of localsolution rapid convergence Consequently some modifiedPSO algorithms are presented which include inertia weightmethod tracking dynamic system method and constrictionfactors method [9] The inertia weight method is applied inthis paper which provides PSO with the ability to searchrapidly for optimum solution at initial stage and possesses
Computeadaptation value
of the particle
Number ofiterations
End
No
Initialize positionand velocity of
the particle
Update the bestvalue of individual
particle Pbest
Update the bestvalue of swarmparticles Gbest
Figure 3 The flowchart of PSO algorithm
effective convergence at later stage the position and velocityupdated formulae are described as follows
119881119894(119896 + 1) = 119908 times 119881
119894(119896) + 119862
1times Rand times (119875best minus 119909
119894)
+ 1198622times Rand times (119866best minus 119909
119894)
119909119894(119896 + 1) = 119909
119894(119896) + 119881
119894(119896 + 1)
(25)
where 119881119894(119896) and 119909
119894(119896) are the velocity and position of the
particle respectively 119875best and119866best are the optimum solutionposition of the individual particle and swarm particlesrespectively119908 is theweighting factor119862
1and119862
2are the learn-
ing factors and Rand is the uniform distribution randomvariable over [0 1]
The flowchart of PSO algorithm is shown in Figure 3The first particle is produced randomly and the best
function value can be found by iteration searching in PSOalgorithmThe best solution is obtained by applying 119875best and119866best to compute optimum variable The design procedure ofPSO algorithms is as follows
Step 1 Create initial position and velocity of the particle in119889-dimension space randomly
Step 2 Apply objective function to compute the adaptationvalue of each particle
Step 3 Compare the position of the present particle with thesearching best solution position 119875best of individual particleIf the new searching adaptation value of the present particleis better to 119875best then update 119875best with the new searchingadaptation value of the present particle
Step 4 Compare the position of the present particle with thesearching best solution position 119866best of swarm particles If
Mathematical Problems in Engineering 5
2
P
PSO speedcontroller
Rotorspeed
estimation
r
Tlowaste 4Lr
3PLm120582lowastr
minusminus
minusminus
+ +
+
+
+
+
++120590Ls
120590Ls
e
e
MRAS for 120596eidentification
Rotor-fluxestimator
Inverter
IM
120596lowastrm
rm
ilowastqs
ilowastds
dr
Kpf +Kif
s
120582lowastr
Kpq +Kiq
s
Kpd +Kid
s
s
dr
120596e +1 minus 120590
120590Lm
120596edrids
120596e +1 minus 120590
120590120591rLm
iqs dr
998400qs lowastqs
998400ds lowastds
idsiqs
iasibsics
lowastas
isqs
isds
lowastbslowastcs
2e⟹2s 2s⟹3
2e
⟹
2s
2e
⟹
2s 2s
⟹
3
slowast
qs
slowast
ds
Figure 4 Sensorless RFOC IM drive with PSO algorithm speed controller design
the new searching adaptation value of the present particleis better to 119866best then update 119866best with the new searchingadaptation value of the present particle
Step 5 Utilizing (25) update the position and velocity of theparticle
Step 6 Repeat Step 2simStep 5 until the desired accuracy isobtained
4 Simulation and Experimental
The block diagram of the proposed sensorless RFOC IMdrive with PSO algorithm speed controller is shown inFigure 4 which includes PSO algorithm speed controllerflux controller 119902-axis and 119889-axis stator current controllersvoltage decouple coordinate transformation MRAS basedrotor speed estimator and current-and-voltage serial-modelrotor-flux estimator In this system the speed control loopis designed using PSO algorithm the flux control loop 119889-axis and 119902-axis stator current control loops are designedproportion-integral (PI) type controller based on the root-locus method The Bode plot of the proposed speed controlloop based on PSO design is shown in Figure 5 The pro-portion gain (119870
119901) integral gain (119870
119894) and bandwidth (119861119882)
for four controllers are shown in Table 1 The simulationscheme that was designed utilizing toolbox MatlabSimulinkis shown in Figure 6
To confirm the effectiveness of the proposed sensorlessRFOC IM drive with PSO algorithm speed controller design
10
0
minus10
minus20
minus30
minus400
minus45
minus90
Bode diagram
Frequency (rads)10minus1 100 101 102 103 104
Phas
e (de
g)M
agni
tude
(dB)
System sysFrequency (rads) 109
Magnitude (dB) minus3
Figure 5 Bode plot of the speed control loop based on PSO design
Table 1 Controller parameters and its bandwidth
119870119901
119870119894
BWSpeed controller 09898 14847 109Flux controller 48655 9015 1060119902-axis stator current controller 61651 41099 2970119889-axis stator current controller 89549 44784 3970
a 3-phase 220V 075 kW Δ-connected standard squirrel-cage IM (the parameters of the used IM are listed in Table 2)
6 Mathematical Problems in Engineering
1000
pi30Gain
+minus
+minus
Clock t
t
+
s
120596m
Transfer Fcn
F lowast r
Flux generator
times
divide
Divide
+
s
Transfer Fcn1
Transfer Fcn3
Transfer Fcn2
Transfer Fcn4
4 lowast Lr
3 lowast P lowast Lm +
s
+
s
120596e
120596e
Fedr
Fedr
Fsdr
Fsqr
qe
qe
qe
qe
ids
iqs
fds
fqs
Speed estimation
Series
Fdr
Fqr
120596r
VqsVds
2s to 2e
2s to 2e
isq
isd
Ieqs
Ieqs
Ieds
120596e
Fedr
Ieds
Out1
Out1
Subsystem
Subsystem1
3s to 2s
Isq
Isd
Ias
Ibs
Ics
Le lowast Ls
Le lowast Ls
Gain1
Gain2
Veqs
Veds
VasVsq Vsq
Vbs
Vsd VsdVcs
2e to 2s 2s to 3s
ias
ibs
ics
Te120596m
qm
an
bn
cn
TL
IM
30pirads to rpm
0
Constantqmqm120596rm
120596rm
TeTe
idsiqs
+minus
+minus
+minus
++
120596rm
Kpsmiddots
Kpfmiddots
Kpqmiddots
Kpdmiddots
Kis
Kiq
Kif Kid
Figure 6 Simulation scheme for sensorless RFOC IM drive with PSO algorithm speed controller design
Table 2 The parameters of the used IM
Poles 4119877119904(Ω) 285
119877119903(Ω) 23433
119871119904(H) 01967
119871119903(H) 01967
119871119898(H) 01886
119869119898(Nt-s2m) 0009
119861119898(Nt-s2m2) 000825
is used which serves as the controlled plant for experimenta-tion To confirm the effectiveness of the proposed sensorlessRFOC IM drive with PSO algorithm speed controller designa 3-phase 220V 075 kW Δ-connected standard squirrel-cage IM is used which serves as the controlled plant forexperimentation In a running cycle the speed commandis designed as follows forward direction acceleration from119905 = 0 to 119905 = 1 sec forward direction steady-state operationduring 1 le 119905 le 2 sec forward direction braking operationto reach zero speed in the interval 2 le 119905 le 3 sec reversedirection acceleration from 119905 = 3 to 119905 = 4 sec reversedirection steady-state operation during 4 le 119905 le 5 sec andreverse direction braking operation to reach zero speed inthe interval 5 le 119905 le 6 sec The simulated and measured
responses are shown in Figures 7ndash18 Each figure containsfour responses the actual shaft speed the estimated shaftspeed the rotor-flux linkage locus and the estimated elec-tromagnetic torque The simulated and measured responseswith no-load for reversible steady-state speed commandsplusmn300 rpm plusmn900 rpm and plusmn1800 rpm are shown in Figures7 8 9 10 11 and 12 respectively And the simulated andmeasured responseswith loading 2N-m for reversible steady-state speed commands plusmn300 rpm plusmn900 rpm and plusmn1800 rpmare shown in Figures 13 14 15 16 17 and 18 respectively
Based on the simulated and experimental results fordifferent operational speeds as shown in Figures 7ndash18 theproposed MRAS rotor-shaft speed on-line estimation sen-sorless RFOC IM drive with PSO algorithm speed controllerdesign strategy has shown that the desired performance canbe acquired
5 Conclusions
A sensorless RFOC based on current-and-voltage serial-model rotor-flux estimator with PSO algorithm speed con-troller design strategy has been proposed to control an IMdrive The proposed rotor-flux estimator acquired exactlyestimation flux angle position of coordinate transforma-tion between the synchronous reference coordinate frameand the stationary reference coordinate frame The flux
Mathematical Problems in Engineering 7
400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
Estim
ated
spee
d (r
adm
in) 400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
1
0
minus1
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 7 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 300 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
Estim
ated
spee
d (r
adm
in) 400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
1
0
minus1
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 8 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 300 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
8 Mathematical Problems in Engineering
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
1200
800
400
0
minus400
minus800
minus1200
(a)
0 3 6 9 12
Time (s)
1200
800
400
0
minus400
minus800
minus1200Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
2
0
minus2
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 9 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 900 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
1200
800
400
0
minus400
minus800
minus1200
(a)
0 3 6 9 12
Time (s)
1200
800
400
0
minus400
minus800
minus1200Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
2
0
minus20 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 10 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 900 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
Mathematical Problems in Engineering 9
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 11 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 12 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
10 Mathematical Problems in Engineering
400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
Estim
ated
spee
d (r
adm
in) 400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
3
0
minus3
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 13 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 300 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
Estim
ated
spee
d (r
adm
in) 400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
2
0
minus2
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 14 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 300 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
Mathematical Problems in Engineering 11
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
1200
800
400
0
minus400
minus800
minus1200
(a)
0 3 6 9 12
Time (s)
1200
800
400
0
minus400
minus800
minus1200Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 15 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 900 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
1200
800
400
0
minus400
minus800
minus1200
(a)
0 3 6 9 12
Time (s)
1200
800
400
0
minus400
minus800
minus1200Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
3
0
minus3
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 16 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 900 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
12 Mathematical Problems in Engineering
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
6
0
minus6
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 17 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 18 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
Mathematical Problems in Engineering 13
estimator based MRAS scheme can accurately identifythe rotor-shaft speed on-line The speed controller designstrategy utilizing PSO algorithm obtained superior speedresponse The simulated and experimental responses at dif-ferent reversible steady-state speed commands (plusmn300 rpmplusmn900 rpm and plusmn1800 rpm) confirm the effectiveness of theproposed approach
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] F Blaschke ldquoThe principle of field orientation as applied to thenew transvektor closed-loop control system for rotating-fieldmachinesrdquo Siemens Review vol 39 no 5 pp 217ndash220 1972
[2] H Tajima and Y Hori ldquoSpeed sensorless field-orientation con-trol of the induction machinerdquo IEEE Transactions on IndustryApplications vol 29 no 1 pp 175ndash180 1993
[3] Y C Luo and W X Chen ldquoSensorless stator field orientationcontrolled induction motor drive with fuzzy speed controllerrdquoComputers andMathematics with Applications vol 64 no 5 pp1206ndash1216 2012
[4] Y D Landau Adaptive Control The Model Reference Approachvol 8 Marcel Dekker New York NY USA 1979
[5] J Kennedy and R C Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 IEEE Perth Australia Decem-ber 1995
[6] C H Liu Control of AC Electrical Machines Tunghua TaipeiTaiwan 4th edition 2008 (Chinese)
[7] C Schauder ldquoAdaptive speed identification for vector controlof induction motors without rotational transducersrdquo IEEETransactions on Industry Applications vol 28 no 5 pp 1054ndash1061 1992
[8] R Eberhart and J Kennedy ldquoA New optimizer using particleswarm theoryrdquo in Proceedings of the 6th International Sympo-sium on Micro Machine and Human Science pp 39ndash43 IEEENagoya Japan October 1995
[9] Y Shi and R Eberhart ldquoModified particle swarm optimizerrdquoin Proceedings of the IEEE International Conference on Evolu-tionary Computation (ICEC rsquo98) pp 69ndash73 IEEE AnchorageAlaska USA May 1998
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 3
Kpr
Kir
rarr
iss +
+ +
+
+
+
+
+minus minus
minus
minus
Lm
120591r
1
s
1
s
1
s
Rs
Lr
Lm
120590
1 minus 120590Lm
Voltage model
Current modelr
rarr
ss
rarr120582
s
ri rarr120582
s
rv
rarr120582
s
s
( 1120591r
minus )jr
rarr120582
s
ri
Figure 1 Current-and-voltage serial-model rotor-flux estimator
Then the decoupling control of the 119889-axis stator currentcontrol loop can be acquired and the decoupling voltageequation of the 119889-axis stator current control loop is derivedas
Vlowast119889119904
= 120590119871119904(V1015840119889119904
minus 120596119890119894119902119904
minus
1 minus 120590
120590120591119903119871119898
120582119889119903) (17)
where Vlowast119889119904is the command of the 119889-axis stator voltage and V1015840
119889119904
is the linear output signal of the 119889-axis stator current controlloop
3 Sensorless RFOC Induction Motor Drive
It is necessary to design a speed estimator to replace thefeedback speed in the sensorless RFOC induction motordrive and the speed estimator can be acquired from the rotor-flux estimator
31 Rotor-Flux Estimator The stator current and rotor-fluxlinkage are chosen as state variables in RFOC schemeRewrite (4) as
119894119903=
1
119871119903
(
120582119903minus 119871119898
119894119904) (18)
Then substituting (18) into (3) the stator flux linkage canbe expressed as the function of stator current and rotor-fluxlinkage that is
120582119904= 120590119871119904
119894119904+
119871119898
119871119903
120582119903 (19)
Substituting (19) into (1) the stator voltage equation canbe also expressed by
V119904= (119877119904+ 119895120596119890120590119871119904+ 120590119871119904119901)
119894119904+
119871119898
119871119903
(119895120596119890+ 119901)
120582119903 (20)
Set 120596119890= 0 in (20) the voltage-model rotor-flux estimator can
be derived as
119901
120582
119904
119903V =
119871119903
119871119898
[V119904119904minus (119877119904+ 120590119871119904119901)
119894
119904
119904] (21)
where the superscript ldquo119904rdquo is represented in the stationarycoordinate frame
Then substituting (18) into (2) and setting also 120596119890
= 0the current-model rotor-flux estimator can be derived as
119901
120582
119904
119903119894=
119871119898
120591119903
119894
119904
119904minus (
1
120591119903
minus 119895120596119903)
120582
119904
119903119894 (22)
Both voltage-model and current-model rotor-flux esti-mators are open loop estimators The current-model fluxestimator is affected by the rotor resistance variation at lowspeeds which is affected by the rotor resistance and mutualinductance variation at high speeds The voltage-model fluxestimator is affected by the stator resistance variation and themagnitude of stator voltage at low speeds but is less affected bythe parameters variation at high speeds Hence the current-model rotor-flux estimator is applied for low speeds and thevoltage-model rotor-flux estimator is suitable for high speeds[6] In this paper the closed loop type current-and-voltageserial-model rotor-flux estimator is proposed to improve theestimated rotor-flux for entire speeds and that is shown inFigure 1
Applying the estimated 119889-axis rotor-flux linkage 120582
119904
119889119903and
estimated 119902-axis rotor-flux linkage 120582
119904
119902119903 which are acquired
from Figure 1 the synchronous angular speed for coordinatetransformation between the stationary reference frame andsynchronous reference frame can be obtained that is
120579119890= tanminus1(
120582
119904
119902119903
120582
119904
119889119903
) (23)
4 Mathematical Problems in Engineering
Reference model
Adjustable model
120576
Kp +Ki
s
p =Lr
Lm
s
dris
qr minus s
qris
dr
Adaptationmechanism
rarr
iss
rarr
iss
r
r
rarr
ssrarr
ss[ minus (Rs + 120590Lsp) ]
p =Lm
120591rminus ( 1
120591rminus )rarr
iss jr
rarr120582
s
ri
rarr120582
s
ri
rarr120582
s
rv
Figure 2 MRAS rotor speed estimator based on estimated rotor-flux linkage
32 MRAS Rotor Speed On-Line Estimated Scheme Theestimated synchronous angular speed
119890is derived from the
current-and-voltage serial-model rotor-flux estimator andthe estimated rotor speed
119903can be obtained by subtracting
slip speed 119904119897from
119890
According to MRAS speed estimated scheme which isproposed by Schauder [7] the on-lineMRAS estimated rotorelectrical speed is shown in Figure 2 The voltage-modelrotor-flux estimator relying on (21) is chosen as the referencemodel and the current-model rotor-flux estimator relyingon (22) is chosen as the adjustable model then the errorbetween the reference model and the adjustable model canbe expressed as (24) where the error is passed through anadaptation mechanism to estimate the rotor electrical speedin Figure 2 Consider
120576 =120582
119904
119889119903119894
120582
119904
119902119903V minus120582
119904
119902119903119894
120582
119904
119889119903V (24)
33 PSO Speed Controller Design Strategy PSO is originallyproposed by Kennedy and Eberhart [5 8] which is devisedto simulate social behavior The iterative method is appliedin PSO to improve candidate solution (called particles)to acquire prescribed measure of quality These particlesare moved around in the search-space according to theirposition and velocity Each particle possesses individualoptimum searching variable to correct searching directionin the search-space and that is called particle cognition-onlymodel Comparing individual optimum searching variablewith swarm searching variables and then updating swarmsearching variables to correct searching velocity of theparticles is called swarm social-only model Hence theacquired optimum solution of a problem is according to thebest adaptation value in PSO
Conventional PSO algorithm has a disadvantage of localsolution rapid convergence Consequently some modifiedPSO algorithms are presented which include inertia weightmethod tracking dynamic system method and constrictionfactors method [9] The inertia weight method is applied inthis paper which provides PSO with the ability to searchrapidly for optimum solution at initial stage and possesses
Computeadaptation value
of the particle
Number ofiterations
End
No
Initialize positionand velocity of
the particle
Update the bestvalue of individual
particle Pbest
Update the bestvalue of swarmparticles Gbest
Figure 3 The flowchart of PSO algorithm
effective convergence at later stage the position and velocityupdated formulae are described as follows
119881119894(119896 + 1) = 119908 times 119881
119894(119896) + 119862
1times Rand times (119875best minus 119909
119894)
+ 1198622times Rand times (119866best minus 119909
119894)
119909119894(119896 + 1) = 119909
119894(119896) + 119881
119894(119896 + 1)
(25)
where 119881119894(119896) and 119909
119894(119896) are the velocity and position of the
particle respectively 119875best and119866best are the optimum solutionposition of the individual particle and swarm particlesrespectively119908 is theweighting factor119862
1and119862
2are the learn-
ing factors and Rand is the uniform distribution randomvariable over [0 1]
The flowchart of PSO algorithm is shown in Figure 3The first particle is produced randomly and the best
function value can be found by iteration searching in PSOalgorithmThe best solution is obtained by applying 119875best and119866best to compute optimum variable The design procedure ofPSO algorithms is as follows
Step 1 Create initial position and velocity of the particle in119889-dimension space randomly
Step 2 Apply objective function to compute the adaptationvalue of each particle
Step 3 Compare the position of the present particle with thesearching best solution position 119875best of individual particleIf the new searching adaptation value of the present particleis better to 119875best then update 119875best with the new searchingadaptation value of the present particle
Step 4 Compare the position of the present particle with thesearching best solution position 119866best of swarm particles If
Mathematical Problems in Engineering 5
2
P
PSO speedcontroller
Rotorspeed
estimation
r
Tlowaste 4Lr
3PLm120582lowastr
minusminus
minusminus
+ +
+
+
+
+
++120590Ls
120590Ls
e
e
MRAS for 120596eidentification
Rotor-fluxestimator
Inverter
IM
120596lowastrm
rm
ilowastqs
ilowastds
dr
Kpf +Kif
s
120582lowastr
Kpq +Kiq
s
Kpd +Kid
s
s
dr
120596e +1 minus 120590
120590Lm
120596edrids
120596e +1 minus 120590
120590120591rLm
iqs dr
998400qs lowastqs
998400ds lowastds
idsiqs
iasibsics
lowastas
isqs
isds
lowastbslowastcs
2e⟹2s 2s⟹3
2e
⟹
2s
2e
⟹
2s 2s
⟹
3
slowast
qs
slowast
ds
Figure 4 Sensorless RFOC IM drive with PSO algorithm speed controller design
the new searching adaptation value of the present particleis better to 119866best then update 119866best with the new searchingadaptation value of the present particle
Step 5 Utilizing (25) update the position and velocity of theparticle
Step 6 Repeat Step 2simStep 5 until the desired accuracy isobtained
4 Simulation and Experimental
The block diagram of the proposed sensorless RFOC IMdrive with PSO algorithm speed controller is shown inFigure 4 which includes PSO algorithm speed controllerflux controller 119902-axis and 119889-axis stator current controllersvoltage decouple coordinate transformation MRAS basedrotor speed estimator and current-and-voltage serial-modelrotor-flux estimator In this system the speed control loopis designed using PSO algorithm the flux control loop 119889-axis and 119902-axis stator current control loops are designedproportion-integral (PI) type controller based on the root-locus method The Bode plot of the proposed speed controlloop based on PSO design is shown in Figure 5 The pro-portion gain (119870
119901) integral gain (119870
119894) and bandwidth (119861119882)
for four controllers are shown in Table 1 The simulationscheme that was designed utilizing toolbox MatlabSimulinkis shown in Figure 6
To confirm the effectiveness of the proposed sensorlessRFOC IM drive with PSO algorithm speed controller design
10
0
minus10
minus20
minus30
minus400
minus45
minus90
Bode diagram
Frequency (rads)10minus1 100 101 102 103 104
Phas
e (de
g)M
agni
tude
(dB)
System sysFrequency (rads) 109
Magnitude (dB) minus3
Figure 5 Bode plot of the speed control loop based on PSO design
Table 1 Controller parameters and its bandwidth
119870119901
119870119894
BWSpeed controller 09898 14847 109Flux controller 48655 9015 1060119902-axis stator current controller 61651 41099 2970119889-axis stator current controller 89549 44784 3970
a 3-phase 220V 075 kW Δ-connected standard squirrel-cage IM (the parameters of the used IM are listed in Table 2)
6 Mathematical Problems in Engineering
1000
pi30Gain
+minus
+minus
Clock t
t
+
s
120596m
Transfer Fcn
F lowast r
Flux generator
times
divide
Divide
+
s
Transfer Fcn1
Transfer Fcn3
Transfer Fcn2
Transfer Fcn4
4 lowast Lr
3 lowast P lowast Lm +
s
+
s
120596e
120596e
Fedr
Fedr
Fsdr
Fsqr
qe
qe
qe
qe
ids
iqs
fds
fqs
Speed estimation
Series
Fdr
Fqr
120596r
VqsVds
2s to 2e
2s to 2e
isq
isd
Ieqs
Ieqs
Ieds
120596e
Fedr
Ieds
Out1
Out1
Subsystem
Subsystem1
3s to 2s
Isq
Isd
Ias
Ibs
Ics
Le lowast Ls
Le lowast Ls
Gain1
Gain2
Veqs
Veds
VasVsq Vsq
Vbs
Vsd VsdVcs
2e to 2s 2s to 3s
ias
ibs
ics
Te120596m
qm
an
bn
cn
TL
IM
30pirads to rpm
0
Constantqmqm120596rm
120596rm
TeTe
idsiqs
+minus
+minus
+minus
++
120596rm
Kpsmiddots
Kpfmiddots
Kpqmiddots
Kpdmiddots
Kis
Kiq
Kif Kid
Figure 6 Simulation scheme for sensorless RFOC IM drive with PSO algorithm speed controller design
Table 2 The parameters of the used IM
Poles 4119877119904(Ω) 285
119877119903(Ω) 23433
119871119904(H) 01967
119871119903(H) 01967
119871119898(H) 01886
119869119898(Nt-s2m) 0009
119861119898(Nt-s2m2) 000825
is used which serves as the controlled plant for experimenta-tion To confirm the effectiveness of the proposed sensorlessRFOC IM drive with PSO algorithm speed controller designa 3-phase 220V 075 kW Δ-connected standard squirrel-cage IM is used which serves as the controlled plant forexperimentation In a running cycle the speed commandis designed as follows forward direction acceleration from119905 = 0 to 119905 = 1 sec forward direction steady-state operationduring 1 le 119905 le 2 sec forward direction braking operationto reach zero speed in the interval 2 le 119905 le 3 sec reversedirection acceleration from 119905 = 3 to 119905 = 4 sec reversedirection steady-state operation during 4 le 119905 le 5 sec andreverse direction braking operation to reach zero speed inthe interval 5 le 119905 le 6 sec The simulated and measured
responses are shown in Figures 7ndash18 Each figure containsfour responses the actual shaft speed the estimated shaftspeed the rotor-flux linkage locus and the estimated elec-tromagnetic torque The simulated and measured responseswith no-load for reversible steady-state speed commandsplusmn300 rpm plusmn900 rpm and plusmn1800 rpm are shown in Figures7 8 9 10 11 and 12 respectively And the simulated andmeasured responseswith loading 2N-m for reversible steady-state speed commands plusmn300 rpm plusmn900 rpm and plusmn1800 rpmare shown in Figures 13 14 15 16 17 and 18 respectively
Based on the simulated and experimental results fordifferent operational speeds as shown in Figures 7ndash18 theproposed MRAS rotor-shaft speed on-line estimation sen-sorless RFOC IM drive with PSO algorithm speed controllerdesign strategy has shown that the desired performance canbe acquired
5 Conclusions
A sensorless RFOC based on current-and-voltage serial-model rotor-flux estimator with PSO algorithm speed con-troller design strategy has been proposed to control an IMdrive The proposed rotor-flux estimator acquired exactlyestimation flux angle position of coordinate transforma-tion between the synchronous reference coordinate frameand the stationary reference coordinate frame The flux
Mathematical Problems in Engineering 7
400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
Estim
ated
spee
d (r
adm
in) 400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
1
0
minus1
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 7 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 300 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
Estim
ated
spee
d (r
adm
in) 400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
1
0
minus1
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 8 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 300 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
8 Mathematical Problems in Engineering
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
1200
800
400
0
minus400
minus800
minus1200
(a)
0 3 6 9 12
Time (s)
1200
800
400
0
minus400
minus800
minus1200Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
2
0
minus2
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 9 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 900 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
1200
800
400
0
minus400
minus800
minus1200
(a)
0 3 6 9 12
Time (s)
1200
800
400
0
minus400
minus800
minus1200Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
2
0
minus20 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 10 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 900 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
Mathematical Problems in Engineering 9
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 11 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 12 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
10 Mathematical Problems in Engineering
400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
Estim
ated
spee
d (r
adm
in) 400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
3
0
minus3
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 13 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 300 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
Estim
ated
spee
d (r
adm
in) 400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
2
0
minus2
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 14 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 300 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
Mathematical Problems in Engineering 11
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
1200
800
400
0
minus400
minus800
minus1200
(a)
0 3 6 9 12
Time (s)
1200
800
400
0
minus400
minus800
minus1200Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 15 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 900 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
1200
800
400
0
minus400
minus800
minus1200
(a)
0 3 6 9 12
Time (s)
1200
800
400
0
minus400
minus800
minus1200Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
3
0
minus3
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 16 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 900 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
12 Mathematical Problems in Engineering
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
6
0
minus6
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 17 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 18 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
Mathematical Problems in Engineering 13
estimator based MRAS scheme can accurately identifythe rotor-shaft speed on-line The speed controller designstrategy utilizing PSO algorithm obtained superior speedresponse The simulated and experimental responses at dif-ferent reversible steady-state speed commands (plusmn300 rpmplusmn900 rpm and plusmn1800 rpm) confirm the effectiveness of theproposed approach
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] F Blaschke ldquoThe principle of field orientation as applied to thenew transvektor closed-loop control system for rotating-fieldmachinesrdquo Siemens Review vol 39 no 5 pp 217ndash220 1972
[2] H Tajima and Y Hori ldquoSpeed sensorless field-orientation con-trol of the induction machinerdquo IEEE Transactions on IndustryApplications vol 29 no 1 pp 175ndash180 1993
[3] Y C Luo and W X Chen ldquoSensorless stator field orientationcontrolled induction motor drive with fuzzy speed controllerrdquoComputers andMathematics with Applications vol 64 no 5 pp1206ndash1216 2012
[4] Y D Landau Adaptive Control The Model Reference Approachvol 8 Marcel Dekker New York NY USA 1979
[5] J Kennedy and R C Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 IEEE Perth Australia Decem-ber 1995
[6] C H Liu Control of AC Electrical Machines Tunghua TaipeiTaiwan 4th edition 2008 (Chinese)
[7] C Schauder ldquoAdaptive speed identification for vector controlof induction motors without rotational transducersrdquo IEEETransactions on Industry Applications vol 28 no 5 pp 1054ndash1061 1992
[8] R Eberhart and J Kennedy ldquoA New optimizer using particleswarm theoryrdquo in Proceedings of the 6th International Sympo-sium on Micro Machine and Human Science pp 39ndash43 IEEENagoya Japan October 1995
[9] Y Shi and R Eberhart ldquoModified particle swarm optimizerrdquoin Proceedings of the IEEE International Conference on Evolu-tionary Computation (ICEC rsquo98) pp 69ndash73 IEEE AnchorageAlaska USA May 1998
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

4 Mathematical Problems in Engineering
Reference model
Adjustable model
120576
Kp +Ki
s
p =Lr
Lm
s
dris
qr minus s
qris
dr
Adaptationmechanism
rarr
iss
rarr
iss
r
r
rarr
ssrarr
ss[ minus (Rs + 120590Lsp) ]
p =Lm
120591rminus ( 1
120591rminus )rarr
iss jr
rarr120582
s
ri
rarr120582
s
ri
rarr120582
s
rv
Figure 2 MRAS rotor speed estimator based on estimated rotor-flux linkage
32 MRAS Rotor Speed On-Line Estimated Scheme Theestimated synchronous angular speed
119890is derived from the
current-and-voltage serial-model rotor-flux estimator andthe estimated rotor speed
119903can be obtained by subtracting
slip speed 119904119897from
119890
According to MRAS speed estimated scheme which isproposed by Schauder [7] the on-lineMRAS estimated rotorelectrical speed is shown in Figure 2 The voltage-modelrotor-flux estimator relying on (21) is chosen as the referencemodel and the current-model rotor-flux estimator relyingon (22) is chosen as the adjustable model then the errorbetween the reference model and the adjustable model canbe expressed as (24) where the error is passed through anadaptation mechanism to estimate the rotor electrical speedin Figure 2 Consider
120576 =120582
119904
119889119903119894
120582
119904
119902119903V minus120582
119904
119902119903119894
120582
119904
119889119903V (24)
33 PSO Speed Controller Design Strategy PSO is originallyproposed by Kennedy and Eberhart [5 8] which is devisedto simulate social behavior The iterative method is appliedin PSO to improve candidate solution (called particles)to acquire prescribed measure of quality These particlesare moved around in the search-space according to theirposition and velocity Each particle possesses individualoptimum searching variable to correct searching directionin the search-space and that is called particle cognition-onlymodel Comparing individual optimum searching variablewith swarm searching variables and then updating swarmsearching variables to correct searching velocity of theparticles is called swarm social-only model Hence theacquired optimum solution of a problem is according to thebest adaptation value in PSO
Conventional PSO algorithm has a disadvantage of localsolution rapid convergence Consequently some modifiedPSO algorithms are presented which include inertia weightmethod tracking dynamic system method and constrictionfactors method [9] The inertia weight method is applied inthis paper which provides PSO with the ability to searchrapidly for optimum solution at initial stage and possesses
Computeadaptation value
of the particle
Number ofiterations
End
No
Initialize positionand velocity of
the particle
Update the bestvalue of individual
particle Pbest
Update the bestvalue of swarmparticles Gbest
Figure 3 The flowchart of PSO algorithm
effective convergence at later stage the position and velocityupdated formulae are described as follows
119881119894(119896 + 1) = 119908 times 119881
119894(119896) + 119862
1times Rand times (119875best minus 119909
119894)
+ 1198622times Rand times (119866best minus 119909
119894)
119909119894(119896 + 1) = 119909
119894(119896) + 119881
119894(119896 + 1)
(25)
where 119881119894(119896) and 119909
119894(119896) are the velocity and position of the
particle respectively 119875best and119866best are the optimum solutionposition of the individual particle and swarm particlesrespectively119908 is theweighting factor119862
1and119862
2are the learn-
ing factors and Rand is the uniform distribution randomvariable over [0 1]
The flowchart of PSO algorithm is shown in Figure 3The first particle is produced randomly and the best
function value can be found by iteration searching in PSOalgorithmThe best solution is obtained by applying 119875best and119866best to compute optimum variable The design procedure ofPSO algorithms is as follows
Step 1 Create initial position and velocity of the particle in119889-dimension space randomly
Step 2 Apply objective function to compute the adaptationvalue of each particle
Step 3 Compare the position of the present particle with thesearching best solution position 119875best of individual particleIf the new searching adaptation value of the present particleis better to 119875best then update 119875best with the new searchingadaptation value of the present particle
Step 4 Compare the position of the present particle with thesearching best solution position 119866best of swarm particles If
Mathematical Problems in Engineering 5
2
P
PSO speedcontroller
Rotorspeed
estimation
r
Tlowaste 4Lr
3PLm120582lowastr
minusminus
minusminus
+ +
+
+
+
+
++120590Ls
120590Ls
e
e
MRAS for 120596eidentification
Rotor-fluxestimator
Inverter
IM
120596lowastrm
rm
ilowastqs
ilowastds
dr
Kpf +Kif
s
120582lowastr
Kpq +Kiq
s
Kpd +Kid
s
s
dr
120596e +1 minus 120590
120590Lm
120596edrids
120596e +1 minus 120590
120590120591rLm
iqs dr
998400qs lowastqs
998400ds lowastds
idsiqs
iasibsics
lowastas
isqs
isds
lowastbslowastcs
2e⟹2s 2s⟹3
2e
⟹
2s
2e
⟹
2s 2s
⟹
3
slowast
qs
slowast
ds
Figure 4 Sensorless RFOC IM drive with PSO algorithm speed controller design
the new searching adaptation value of the present particleis better to 119866best then update 119866best with the new searchingadaptation value of the present particle
Step 5 Utilizing (25) update the position and velocity of theparticle
Step 6 Repeat Step 2simStep 5 until the desired accuracy isobtained
4 Simulation and Experimental
The block diagram of the proposed sensorless RFOC IMdrive with PSO algorithm speed controller is shown inFigure 4 which includes PSO algorithm speed controllerflux controller 119902-axis and 119889-axis stator current controllersvoltage decouple coordinate transformation MRAS basedrotor speed estimator and current-and-voltage serial-modelrotor-flux estimator In this system the speed control loopis designed using PSO algorithm the flux control loop 119889-axis and 119902-axis stator current control loops are designedproportion-integral (PI) type controller based on the root-locus method The Bode plot of the proposed speed controlloop based on PSO design is shown in Figure 5 The pro-portion gain (119870
119901) integral gain (119870
119894) and bandwidth (119861119882)
for four controllers are shown in Table 1 The simulationscheme that was designed utilizing toolbox MatlabSimulinkis shown in Figure 6
To confirm the effectiveness of the proposed sensorlessRFOC IM drive with PSO algorithm speed controller design
10
0
minus10
minus20
minus30
minus400
minus45
minus90
Bode diagram
Frequency (rads)10minus1 100 101 102 103 104
Phas
e (de
g)M
agni
tude
(dB)
System sysFrequency (rads) 109
Magnitude (dB) minus3
Figure 5 Bode plot of the speed control loop based on PSO design
Table 1 Controller parameters and its bandwidth
119870119901
119870119894
BWSpeed controller 09898 14847 109Flux controller 48655 9015 1060119902-axis stator current controller 61651 41099 2970119889-axis stator current controller 89549 44784 3970
a 3-phase 220V 075 kW Δ-connected standard squirrel-cage IM (the parameters of the used IM are listed in Table 2)
6 Mathematical Problems in Engineering
1000
pi30Gain
+minus
+minus
Clock t
t
+
s
120596m
Transfer Fcn
F lowast r
Flux generator
times
divide
Divide
+
s
Transfer Fcn1
Transfer Fcn3
Transfer Fcn2
Transfer Fcn4
4 lowast Lr
3 lowast P lowast Lm +
s
+
s
120596e
120596e
Fedr
Fedr
Fsdr
Fsqr
qe
qe
qe
qe
ids
iqs
fds
fqs
Speed estimation
Series
Fdr
Fqr
120596r
VqsVds
2s to 2e
2s to 2e
isq
isd
Ieqs
Ieqs
Ieds
120596e
Fedr
Ieds
Out1
Out1
Subsystem
Subsystem1
3s to 2s
Isq
Isd
Ias
Ibs
Ics
Le lowast Ls
Le lowast Ls
Gain1
Gain2
Veqs
Veds
VasVsq Vsq
Vbs
Vsd VsdVcs
2e to 2s 2s to 3s
ias
ibs
ics
Te120596m
qm
an
bn
cn
TL
IM
30pirads to rpm
0
Constantqmqm120596rm
120596rm
TeTe
idsiqs
+minus
+minus
+minus
++
120596rm
Kpsmiddots
Kpfmiddots
Kpqmiddots
Kpdmiddots
Kis
Kiq
Kif Kid
Figure 6 Simulation scheme for sensorless RFOC IM drive with PSO algorithm speed controller design
Table 2 The parameters of the used IM
Poles 4119877119904(Ω) 285
119877119903(Ω) 23433
119871119904(H) 01967
119871119903(H) 01967
119871119898(H) 01886
119869119898(Nt-s2m) 0009
119861119898(Nt-s2m2) 000825
is used which serves as the controlled plant for experimenta-tion To confirm the effectiveness of the proposed sensorlessRFOC IM drive with PSO algorithm speed controller designa 3-phase 220V 075 kW Δ-connected standard squirrel-cage IM is used which serves as the controlled plant forexperimentation In a running cycle the speed commandis designed as follows forward direction acceleration from119905 = 0 to 119905 = 1 sec forward direction steady-state operationduring 1 le 119905 le 2 sec forward direction braking operationto reach zero speed in the interval 2 le 119905 le 3 sec reversedirection acceleration from 119905 = 3 to 119905 = 4 sec reversedirection steady-state operation during 4 le 119905 le 5 sec andreverse direction braking operation to reach zero speed inthe interval 5 le 119905 le 6 sec The simulated and measured
responses are shown in Figures 7ndash18 Each figure containsfour responses the actual shaft speed the estimated shaftspeed the rotor-flux linkage locus and the estimated elec-tromagnetic torque The simulated and measured responseswith no-load for reversible steady-state speed commandsplusmn300 rpm plusmn900 rpm and plusmn1800 rpm are shown in Figures7 8 9 10 11 and 12 respectively And the simulated andmeasured responseswith loading 2N-m for reversible steady-state speed commands plusmn300 rpm plusmn900 rpm and plusmn1800 rpmare shown in Figures 13 14 15 16 17 and 18 respectively
Based on the simulated and experimental results fordifferent operational speeds as shown in Figures 7ndash18 theproposed MRAS rotor-shaft speed on-line estimation sen-sorless RFOC IM drive with PSO algorithm speed controllerdesign strategy has shown that the desired performance canbe acquired
5 Conclusions
A sensorless RFOC based on current-and-voltage serial-model rotor-flux estimator with PSO algorithm speed con-troller design strategy has been proposed to control an IMdrive The proposed rotor-flux estimator acquired exactlyestimation flux angle position of coordinate transforma-tion between the synchronous reference coordinate frameand the stationary reference coordinate frame The flux
Mathematical Problems in Engineering 7
400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
Estim
ated
spee
d (r
adm
in) 400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
1
0
minus1
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 7 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 300 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
Estim
ated
spee
d (r
adm
in) 400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
1
0
minus1
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 8 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 300 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
8 Mathematical Problems in Engineering
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
1200
800
400
0
minus400
minus800
minus1200
(a)
0 3 6 9 12
Time (s)
1200
800
400
0
minus400
minus800
minus1200Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
2
0
minus2
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 9 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 900 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
1200
800
400
0
minus400
minus800
minus1200
(a)
0 3 6 9 12
Time (s)
1200
800
400
0
minus400
minus800
minus1200Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
2
0
minus20 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 10 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 900 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
Mathematical Problems in Engineering 9
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 11 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 12 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
10 Mathematical Problems in Engineering
400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
Estim
ated
spee
d (r
adm
in) 400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
3
0
minus3
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 13 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 300 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
Estim
ated
spee
d (r
adm
in) 400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
2
0
minus2
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 14 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 300 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
Mathematical Problems in Engineering 11
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
1200
800
400
0
minus400
minus800
minus1200
(a)
0 3 6 9 12
Time (s)
1200
800
400
0
minus400
minus800
minus1200Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 15 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 900 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
1200
800
400
0
minus400
minus800
minus1200
(a)
0 3 6 9 12
Time (s)
1200
800
400
0
minus400
minus800
minus1200Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
3
0
minus3
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 16 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 900 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
12 Mathematical Problems in Engineering
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
6
0
minus6
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 17 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 18 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
Mathematical Problems in Engineering 13
estimator based MRAS scheme can accurately identifythe rotor-shaft speed on-line The speed controller designstrategy utilizing PSO algorithm obtained superior speedresponse The simulated and experimental responses at dif-ferent reversible steady-state speed commands (plusmn300 rpmplusmn900 rpm and plusmn1800 rpm) confirm the effectiveness of theproposed approach
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] F Blaschke ldquoThe principle of field orientation as applied to thenew transvektor closed-loop control system for rotating-fieldmachinesrdquo Siemens Review vol 39 no 5 pp 217ndash220 1972
[2] H Tajima and Y Hori ldquoSpeed sensorless field-orientation con-trol of the induction machinerdquo IEEE Transactions on IndustryApplications vol 29 no 1 pp 175ndash180 1993
[3] Y C Luo and W X Chen ldquoSensorless stator field orientationcontrolled induction motor drive with fuzzy speed controllerrdquoComputers andMathematics with Applications vol 64 no 5 pp1206ndash1216 2012
[4] Y D Landau Adaptive Control The Model Reference Approachvol 8 Marcel Dekker New York NY USA 1979
[5] J Kennedy and R C Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 IEEE Perth Australia Decem-ber 1995
[6] C H Liu Control of AC Electrical Machines Tunghua TaipeiTaiwan 4th edition 2008 (Chinese)
[7] C Schauder ldquoAdaptive speed identification for vector controlof induction motors without rotational transducersrdquo IEEETransactions on Industry Applications vol 28 no 5 pp 1054ndash1061 1992
[8] R Eberhart and J Kennedy ldquoA New optimizer using particleswarm theoryrdquo in Proceedings of the 6th International Sympo-sium on Micro Machine and Human Science pp 39ndash43 IEEENagoya Japan October 1995
[9] Y Shi and R Eberhart ldquoModified particle swarm optimizerrdquoin Proceedings of the IEEE International Conference on Evolu-tionary Computation (ICEC rsquo98) pp 69ndash73 IEEE AnchorageAlaska USA May 1998
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 5
2
P
PSO speedcontroller
Rotorspeed
estimation
r
Tlowaste 4Lr
3PLm120582lowastr
minusminus
minusminus
+ +
+
+
+
+
++120590Ls
120590Ls
e
e
MRAS for 120596eidentification
Rotor-fluxestimator
Inverter
IM
120596lowastrm
rm
ilowastqs
ilowastds
dr
Kpf +Kif
s
120582lowastr
Kpq +Kiq
s
Kpd +Kid
s
s
dr
120596e +1 minus 120590
120590Lm
120596edrids
120596e +1 minus 120590
120590120591rLm
iqs dr
998400qs lowastqs
998400ds lowastds
idsiqs
iasibsics
lowastas
isqs
isds
lowastbslowastcs
2e⟹2s 2s⟹3
2e
⟹
2s
2e
⟹
2s 2s
⟹
3
slowast
qs
slowast
ds
Figure 4 Sensorless RFOC IM drive with PSO algorithm speed controller design
the new searching adaptation value of the present particleis better to 119866best then update 119866best with the new searchingadaptation value of the present particle
Step 5 Utilizing (25) update the position and velocity of theparticle
Step 6 Repeat Step 2simStep 5 until the desired accuracy isobtained
4 Simulation and Experimental
The block diagram of the proposed sensorless RFOC IMdrive with PSO algorithm speed controller is shown inFigure 4 which includes PSO algorithm speed controllerflux controller 119902-axis and 119889-axis stator current controllersvoltage decouple coordinate transformation MRAS basedrotor speed estimator and current-and-voltage serial-modelrotor-flux estimator In this system the speed control loopis designed using PSO algorithm the flux control loop 119889-axis and 119902-axis stator current control loops are designedproportion-integral (PI) type controller based on the root-locus method The Bode plot of the proposed speed controlloop based on PSO design is shown in Figure 5 The pro-portion gain (119870
119901) integral gain (119870
119894) and bandwidth (119861119882)
for four controllers are shown in Table 1 The simulationscheme that was designed utilizing toolbox MatlabSimulinkis shown in Figure 6
To confirm the effectiveness of the proposed sensorlessRFOC IM drive with PSO algorithm speed controller design
10
0
minus10
minus20
minus30
minus400
minus45
minus90
Bode diagram
Frequency (rads)10minus1 100 101 102 103 104
Phas
e (de
g)M
agni
tude
(dB)
System sysFrequency (rads) 109
Magnitude (dB) minus3
Figure 5 Bode plot of the speed control loop based on PSO design
Table 1 Controller parameters and its bandwidth
119870119901
119870119894
BWSpeed controller 09898 14847 109Flux controller 48655 9015 1060119902-axis stator current controller 61651 41099 2970119889-axis stator current controller 89549 44784 3970
a 3-phase 220V 075 kW Δ-connected standard squirrel-cage IM (the parameters of the used IM are listed in Table 2)
6 Mathematical Problems in Engineering
1000
pi30Gain
+minus
+minus
Clock t
t
+
s
120596m
Transfer Fcn
F lowast r
Flux generator
times
divide
Divide
+
s
Transfer Fcn1
Transfer Fcn3
Transfer Fcn2
Transfer Fcn4
4 lowast Lr
3 lowast P lowast Lm +
s
+
s
120596e
120596e
Fedr
Fedr
Fsdr
Fsqr
qe
qe
qe
qe
ids
iqs
fds
fqs
Speed estimation
Series
Fdr
Fqr
120596r
VqsVds
2s to 2e
2s to 2e
isq
isd
Ieqs
Ieqs
Ieds
120596e
Fedr
Ieds
Out1
Out1
Subsystem
Subsystem1
3s to 2s
Isq
Isd
Ias
Ibs
Ics
Le lowast Ls
Le lowast Ls
Gain1
Gain2
Veqs
Veds
VasVsq Vsq
Vbs
Vsd VsdVcs
2e to 2s 2s to 3s
ias
ibs
ics
Te120596m
qm
an
bn
cn
TL
IM
30pirads to rpm
0
Constantqmqm120596rm
120596rm
TeTe
idsiqs
+minus
+minus
+minus
++
120596rm
Kpsmiddots
Kpfmiddots
Kpqmiddots
Kpdmiddots
Kis
Kiq
Kif Kid
Figure 6 Simulation scheme for sensorless RFOC IM drive with PSO algorithm speed controller design
Table 2 The parameters of the used IM
Poles 4119877119904(Ω) 285
119877119903(Ω) 23433
119871119904(H) 01967
119871119903(H) 01967
119871119898(H) 01886
119869119898(Nt-s2m) 0009
119861119898(Nt-s2m2) 000825
is used which serves as the controlled plant for experimenta-tion To confirm the effectiveness of the proposed sensorlessRFOC IM drive with PSO algorithm speed controller designa 3-phase 220V 075 kW Δ-connected standard squirrel-cage IM is used which serves as the controlled plant forexperimentation In a running cycle the speed commandis designed as follows forward direction acceleration from119905 = 0 to 119905 = 1 sec forward direction steady-state operationduring 1 le 119905 le 2 sec forward direction braking operationto reach zero speed in the interval 2 le 119905 le 3 sec reversedirection acceleration from 119905 = 3 to 119905 = 4 sec reversedirection steady-state operation during 4 le 119905 le 5 sec andreverse direction braking operation to reach zero speed inthe interval 5 le 119905 le 6 sec The simulated and measured
responses are shown in Figures 7ndash18 Each figure containsfour responses the actual shaft speed the estimated shaftspeed the rotor-flux linkage locus and the estimated elec-tromagnetic torque The simulated and measured responseswith no-load for reversible steady-state speed commandsplusmn300 rpm plusmn900 rpm and plusmn1800 rpm are shown in Figures7 8 9 10 11 and 12 respectively And the simulated andmeasured responseswith loading 2N-m for reversible steady-state speed commands plusmn300 rpm plusmn900 rpm and plusmn1800 rpmare shown in Figures 13 14 15 16 17 and 18 respectively
Based on the simulated and experimental results fordifferent operational speeds as shown in Figures 7ndash18 theproposed MRAS rotor-shaft speed on-line estimation sen-sorless RFOC IM drive with PSO algorithm speed controllerdesign strategy has shown that the desired performance canbe acquired
5 Conclusions
A sensorless RFOC based on current-and-voltage serial-model rotor-flux estimator with PSO algorithm speed con-troller design strategy has been proposed to control an IMdrive The proposed rotor-flux estimator acquired exactlyestimation flux angle position of coordinate transforma-tion between the synchronous reference coordinate frameand the stationary reference coordinate frame The flux
Mathematical Problems in Engineering 7
400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
Estim
ated
spee
d (r
adm
in) 400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
1
0
minus1
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 7 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 300 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
Estim
ated
spee
d (r
adm
in) 400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
1
0
minus1
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 8 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 300 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
8 Mathematical Problems in Engineering
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
1200
800
400
0
minus400
minus800
minus1200
(a)
0 3 6 9 12
Time (s)
1200
800
400
0
minus400
minus800
minus1200Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
2
0
minus2
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 9 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 900 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
1200
800
400
0
minus400
minus800
minus1200
(a)
0 3 6 9 12
Time (s)
1200
800
400
0
minus400
minus800
minus1200Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
2
0
minus20 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 10 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 900 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
Mathematical Problems in Engineering 9
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 11 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 12 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
10 Mathematical Problems in Engineering
400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
Estim
ated
spee
d (r
adm
in) 400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
3
0
minus3
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 13 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 300 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
Estim
ated
spee
d (r
adm
in) 400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
2
0
minus2
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 14 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 300 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
Mathematical Problems in Engineering 11
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
1200
800
400
0
minus400
minus800
minus1200
(a)
0 3 6 9 12
Time (s)
1200
800
400
0
minus400
minus800
minus1200Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 15 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 900 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
1200
800
400
0
minus400
minus800
minus1200
(a)
0 3 6 9 12
Time (s)
1200
800
400
0
minus400
minus800
minus1200Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
3
0
minus3
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 16 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 900 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
12 Mathematical Problems in Engineering
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
6
0
minus6
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 17 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 18 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
Mathematical Problems in Engineering 13
estimator based MRAS scheme can accurately identifythe rotor-shaft speed on-line The speed controller designstrategy utilizing PSO algorithm obtained superior speedresponse The simulated and experimental responses at dif-ferent reversible steady-state speed commands (plusmn300 rpmplusmn900 rpm and plusmn1800 rpm) confirm the effectiveness of theproposed approach
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] F Blaschke ldquoThe principle of field orientation as applied to thenew transvektor closed-loop control system for rotating-fieldmachinesrdquo Siemens Review vol 39 no 5 pp 217ndash220 1972
[2] H Tajima and Y Hori ldquoSpeed sensorless field-orientation con-trol of the induction machinerdquo IEEE Transactions on IndustryApplications vol 29 no 1 pp 175ndash180 1993
[3] Y C Luo and W X Chen ldquoSensorless stator field orientationcontrolled induction motor drive with fuzzy speed controllerrdquoComputers andMathematics with Applications vol 64 no 5 pp1206ndash1216 2012
[4] Y D Landau Adaptive Control The Model Reference Approachvol 8 Marcel Dekker New York NY USA 1979
[5] J Kennedy and R C Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 IEEE Perth Australia Decem-ber 1995
[6] C H Liu Control of AC Electrical Machines Tunghua TaipeiTaiwan 4th edition 2008 (Chinese)
[7] C Schauder ldquoAdaptive speed identification for vector controlof induction motors without rotational transducersrdquo IEEETransactions on Industry Applications vol 28 no 5 pp 1054ndash1061 1992
[8] R Eberhart and J Kennedy ldquoA New optimizer using particleswarm theoryrdquo in Proceedings of the 6th International Sympo-sium on Micro Machine and Human Science pp 39ndash43 IEEENagoya Japan October 1995
[9] Y Shi and R Eberhart ldquoModified particle swarm optimizerrdquoin Proceedings of the IEEE International Conference on Evolu-tionary Computation (ICEC rsquo98) pp 69ndash73 IEEE AnchorageAlaska USA May 1998
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

6 Mathematical Problems in Engineering
1000
pi30Gain
+minus
+minus
Clock t
t
+
s
120596m
Transfer Fcn
F lowast r
Flux generator
times
divide
Divide
+
s
Transfer Fcn1
Transfer Fcn3
Transfer Fcn2
Transfer Fcn4
4 lowast Lr
3 lowast P lowast Lm +
s
+
s
120596e
120596e
Fedr
Fedr
Fsdr
Fsqr
qe
qe
qe
qe
ids
iqs
fds
fqs
Speed estimation
Series
Fdr
Fqr
120596r
VqsVds
2s to 2e
2s to 2e
isq
isd
Ieqs
Ieqs
Ieds
120596e
Fedr
Ieds
Out1
Out1
Subsystem
Subsystem1
3s to 2s
Isq
Isd
Ias
Ibs
Ics
Le lowast Ls
Le lowast Ls
Gain1
Gain2
Veqs
Veds
VasVsq Vsq
Vbs
Vsd VsdVcs
2e to 2s 2s to 3s
ias
ibs
ics
Te120596m
qm
an
bn
cn
TL
IM
30pirads to rpm
0
Constantqmqm120596rm
120596rm
TeTe
idsiqs
+minus
+minus
+minus
++
120596rm
Kpsmiddots
Kpfmiddots
Kpqmiddots
Kpdmiddots
Kis
Kiq
Kif Kid
Figure 6 Simulation scheme for sensorless RFOC IM drive with PSO algorithm speed controller design
Table 2 The parameters of the used IM
Poles 4119877119904(Ω) 285
119877119903(Ω) 23433
119871119904(H) 01967
119871119903(H) 01967
119871119898(H) 01886
119869119898(Nt-s2m) 0009
119861119898(Nt-s2m2) 000825
is used which serves as the controlled plant for experimenta-tion To confirm the effectiveness of the proposed sensorlessRFOC IM drive with PSO algorithm speed controller designa 3-phase 220V 075 kW Δ-connected standard squirrel-cage IM is used which serves as the controlled plant forexperimentation In a running cycle the speed commandis designed as follows forward direction acceleration from119905 = 0 to 119905 = 1 sec forward direction steady-state operationduring 1 le 119905 le 2 sec forward direction braking operationto reach zero speed in the interval 2 le 119905 le 3 sec reversedirection acceleration from 119905 = 3 to 119905 = 4 sec reversedirection steady-state operation during 4 le 119905 le 5 sec andreverse direction braking operation to reach zero speed inthe interval 5 le 119905 le 6 sec The simulated and measured
responses are shown in Figures 7ndash18 Each figure containsfour responses the actual shaft speed the estimated shaftspeed the rotor-flux linkage locus and the estimated elec-tromagnetic torque The simulated and measured responseswith no-load for reversible steady-state speed commandsplusmn300 rpm plusmn900 rpm and plusmn1800 rpm are shown in Figures7 8 9 10 11 and 12 respectively And the simulated andmeasured responseswith loading 2N-m for reversible steady-state speed commands plusmn300 rpm plusmn900 rpm and plusmn1800 rpmare shown in Figures 13 14 15 16 17 and 18 respectively
Based on the simulated and experimental results fordifferent operational speeds as shown in Figures 7ndash18 theproposed MRAS rotor-shaft speed on-line estimation sen-sorless RFOC IM drive with PSO algorithm speed controllerdesign strategy has shown that the desired performance canbe acquired
5 Conclusions
A sensorless RFOC based on current-and-voltage serial-model rotor-flux estimator with PSO algorithm speed con-troller design strategy has been proposed to control an IMdrive The proposed rotor-flux estimator acquired exactlyestimation flux angle position of coordinate transforma-tion between the synchronous reference coordinate frameand the stationary reference coordinate frame The flux
Mathematical Problems in Engineering 7
400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
Estim
ated
spee
d (r
adm
in) 400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
1
0
minus1
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 7 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 300 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
Estim
ated
spee
d (r
adm
in) 400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
1
0
minus1
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 8 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 300 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
8 Mathematical Problems in Engineering
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
1200
800
400
0
minus400
minus800
minus1200
(a)
0 3 6 9 12
Time (s)
1200
800
400
0
minus400
minus800
minus1200Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
2
0
minus2
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 9 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 900 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
1200
800
400
0
minus400
minus800
minus1200
(a)
0 3 6 9 12
Time (s)
1200
800
400
0
minus400
minus800
minus1200Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
2
0
minus20 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 10 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 900 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
Mathematical Problems in Engineering 9
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 11 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 12 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
10 Mathematical Problems in Engineering
400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
Estim
ated
spee
d (r
adm
in) 400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
3
0
minus3
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 13 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 300 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
Estim
ated
spee
d (r
adm
in) 400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
2
0
minus2
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 14 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 300 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
Mathematical Problems in Engineering 11
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
1200
800
400
0
minus400
minus800
minus1200
(a)
0 3 6 9 12
Time (s)
1200
800
400
0
minus400
minus800
minus1200Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 15 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 900 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
1200
800
400
0
minus400
minus800
minus1200
(a)
0 3 6 9 12
Time (s)
1200
800
400
0
minus400
minus800
minus1200Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
3
0
minus3
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 16 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 900 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
12 Mathematical Problems in Engineering
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
6
0
minus6
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 17 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 18 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
Mathematical Problems in Engineering 13
estimator based MRAS scheme can accurately identifythe rotor-shaft speed on-line The speed controller designstrategy utilizing PSO algorithm obtained superior speedresponse The simulated and experimental responses at dif-ferent reversible steady-state speed commands (plusmn300 rpmplusmn900 rpm and plusmn1800 rpm) confirm the effectiveness of theproposed approach
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] F Blaschke ldquoThe principle of field orientation as applied to thenew transvektor closed-loop control system for rotating-fieldmachinesrdquo Siemens Review vol 39 no 5 pp 217ndash220 1972
[2] H Tajima and Y Hori ldquoSpeed sensorless field-orientation con-trol of the induction machinerdquo IEEE Transactions on IndustryApplications vol 29 no 1 pp 175ndash180 1993
[3] Y C Luo and W X Chen ldquoSensorless stator field orientationcontrolled induction motor drive with fuzzy speed controllerrdquoComputers andMathematics with Applications vol 64 no 5 pp1206ndash1216 2012
[4] Y D Landau Adaptive Control The Model Reference Approachvol 8 Marcel Dekker New York NY USA 1979
[5] J Kennedy and R C Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 IEEE Perth Australia Decem-ber 1995
[6] C H Liu Control of AC Electrical Machines Tunghua TaipeiTaiwan 4th edition 2008 (Chinese)
[7] C Schauder ldquoAdaptive speed identification for vector controlof induction motors without rotational transducersrdquo IEEETransactions on Industry Applications vol 28 no 5 pp 1054ndash1061 1992
[8] R Eberhart and J Kennedy ldquoA New optimizer using particleswarm theoryrdquo in Proceedings of the 6th International Sympo-sium on Micro Machine and Human Science pp 39ndash43 IEEENagoya Japan October 1995
[9] Y Shi and R Eberhart ldquoModified particle swarm optimizerrdquoin Proceedings of the IEEE International Conference on Evolu-tionary Computation (ICEC rsquo98) pp 69ndash73 IEEE AnchorageAlaska USA May 1998
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 7
400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
Estim
ated
spee
d (r
adm
in) 400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
1
0
minus1
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 7 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 300 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
Estim
ated
spee
d (r
adm
in) 400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
1
0
minus1
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 8 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 300 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
8 Mathematical Problems in Engineering
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
1200
800
400
0
minus400
minus800
minus1200
(a)
0 3 6 9 12
Time (s)
1200
800
400
0
minus400
minus800
minus1200Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
2
0
minus2
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 9 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 900 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
1200
800
400
0
minus400
minus800
minus1200
(a)
0 3 6 9 12
Time (s)
1200
800
400
0
minus400
minus800
minus1200Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
2
0
minus20 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 10 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 900 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
Mathematical Problems in Engineering 9
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 11 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 12 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
10 Mathematical Problems in Engineering
400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
Estim
ated
spee
d (r
adm
in) 400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
3
0
minus3
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 13 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 300 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
Estim
ated
spee
d (r
adm
in) 400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
2
0
minus2
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 14 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 300 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
Mathematical Problems in Engineering 11
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
1200
800
400
0
minus400
minus800
minus1200
(a)
0 3 6 9 12
Time (s)
1200
800
400
0
minus400
minus800
minus1200Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 15 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 900 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
1200
800
400
0
minus400
minus800
minus1200
(a)
0 3 6 9 12
Time (s)
1200
800
400
0
minus400
minus800
minus1200Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
3
0
minus3
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 16 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 900 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
12 Mathematical Problems in Engineering
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
6
0
minus6
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 17 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 18 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
Mathematical Problems in Engineering 13
estimator based MRAS scheme can accurately identifythe rotor-shaft speed on-line The speed controller designstrategy utilizing PSO algorithm obtained superior speedresponse The simulated and experimental responses at dif-ferent reversible steady-state speed commands (plusmn300 rpmplusmn900 rpm and plusmn1800 rpm) confirm the effectiveness of theproposed approach
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] F Blaschke ldquoThe principle of field orientation as applied to thenew transvektor closed-loop control system for rotating-fieldmachinesrdquo Siemens Review vol 39 no 5 pp 217ndash220 1972
[2] H Tajima and Y Hori ldquoSpeed sensorless field-orientation con-trol of the induction machinerdquo IEEE Transactions on IndustryApplications vol 29 no 1 pp 175ndash180 1993
[3] Y C Luo and W X Chen ldquoSensorless stator field orientationcontrolled induction motor drive with fuzzy speed controllerrdquoComputers andMathematics with Applications vol 64 no 5 pp1206ndash1216 2012
[4] Y D Landau Adaptive Control The Model Reference Approachvol 8 Marcel Dekker New York NY USA 1979
[5] J Kennedy and R C Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 IEEE Perth Australia Decem-ber 1995
[6] C H Liu Control of AC Electrical Machines Tunghua TaipeiTaiwan 4th edition 2008 (Chinese)
[7] C Schauder ldquoAdaptive speed identification for vector controlof induction motors without rotational transducersrdquo IEEETransactions on Industry Applications vol 28 no 5 pp 1054ndash1061 1992
[8] R Eberhart and J Kennedy ldquoA New optimizer using particleswarm theoryrdquo in Proceedings of the 6th International Sympo-sium on Micro Machine and Human Science pp 39ndash43 IEEENagoya Japan October 1995
[9] Y Shi and R Eberhart ldquoModified particle swarm optimizerrdquoin Proceedings of the IEEE International Conference on Evolu-tionary Computation (ICEC rsquo98) pp 69ndash73 IEEE AnchorageAlaska USA May 1998
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

8 Mathematical Problems in Engineering
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
1200
800
400
0
minus400
minus800
minus1200
(a)
0 3 6 9 12
Time (s)
1200
800
400
0
minus400
minus800
minus1200Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
2
0
minus2
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 9 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 900 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
1200
800
400
0
minus400
minus800
minus1200
(a)
0 3 6 9 12
Time (s)
1200
800
400
0
minus400
minus800
minus1200Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
2
0
minus20 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 10 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 900 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
Mathematical Problems in Engineering 9
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 11 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 12 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
10 Mathematical Problems in Engineering
400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
Estim
ated
spee
d (r
adm
in) 400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
3
0
minus3
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 13 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 300 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
Estim
ated
spee
d (r
adm
in) 400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
2
0
minus2
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 14 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 300 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
Mathematical Problems in Engineering 11
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
1200
800
400
0
minus400
minus800
minus1200
(a)
0 3 6 9 12
Time (s)
1200
800
400
0
minus400
minus800
minus1200Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 15 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 900 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
1200
800
400
0
minus400
minus800
minus1200
(a)
0 3 6 9 12
Time (s)
1200
800
400
0
minus400
minus800
minus1200Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
3
0
minus3
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 16 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 900 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
12 Mathematical Problems in Engineering
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
6
0
minus6
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 17 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 18 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
Mathematical Problems in Engineering 13
estimator based MRAS scheme can accurately identifythe rotor-shaft speed on-line The speed controller designstrategy utilizing PSO algorithm obtained superior speedresponse The simulated and experimental responses at dif-ferent reversible steady-state speed commands (plusmn300 rpmplusmn900 rpm and plusmn1800 rpm) confirm the effectiveness of theproposed approach
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] F Blaschke ldquoThe principle of field orientation as applied to thenew transvektor closed-loop control system for rotating-fieldmachinesrdquo Siemens Review vol 39 no 5 pp 217ndash220 1972
[2] H Tajima and Y Hori ldquoSpeed sensorless field-orientation con-trol of the induction machinerdquo IEEE Transactions on IndustryApplications vol 29 no 1 pp 175ndash180 1993
[3] Y C Luo and W X Chen ldquoSensorless stator field orientationcontrolled induction motor drive with fuzzy speed controllerrdquoComputers andMathematics with Applications vol 64 no 5 pp1206ndash1216 2012
[4] Y D Landau Adaptive Control The Model Reference Approachvol 8 Marcel Dekker New York NY USA 1979
[5] J Kennedy and R C Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 IEEE Perth Australia Decem-ber 1995
[6] C H Liu Control of AC Electrical Machines Tunghua TaipeiTaiwan 4th edition 2008 (Chinese)
[7] C Schauder ldquoAdaptive speed identification for vector controlof induction motors without rotational transducersrdquo IEEETransactions on Industry Applications vol 28 no 5 pp 1054ndash1061 1992
[8] R Eberhart and J Kennedy ldquoA New optimizer using particleswarm theoryrdquo in Proceedings of the 6th International Sympo-sium on Micro Machine and Human Science pp 39ndash43 IEEENagoya Japan October 1995
[9] Y Shi and R Eberhart ldquoModified particle swarm optimizerrdquoin Proceedings of the IEEE International Conference on Evolu-tionary Computation (ICEC rsquo98) pp 69ndash73 IEEE AnchorageAlaska USA May 1998
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 9
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 11 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 12 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with no-load atreversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed (blueline) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
10 Mathematical Problems in Engineering
400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
Estim
ated
spee
d (r
adm
in) 400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
3
0
minus3
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 13 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 300 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
Estim
ated
spee
d (r
adm
in) 400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
2
0
minus2
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 14 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 300 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
Mathematical Problems in Engineering 11
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
1200
800
400
0
minus400
minus800
minus1200
(a)
0 3 6 9 12
Time (s)
1200
800
400
0
minus400
minus800
minus1200Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 15 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 900 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
1200
800
400
0
minus400
minus800
minus1200
(a)
0 3 6 9 12
Time (s)
1200
800
400
0
minus400
minus800
minus1200Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
3
0
minus3
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 16 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 900 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
12 Mathematical Problems in Engineering
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
6
0
minus6
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 17 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 18 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
Mathematical Problems in Engineering 13
estimator based MRAS scheme can accurately identifythe rotor-shaft speed on-line The speed controller designstrategy utilizing PSO algorithm obtained superior speedresponse The simulated and experimental responses at dif-ferent reversible steady-state speed commands (plusmn300 rpmplusmn900 rpm and plusmn1800 rpm) confirm the effectiveness of theproposed approach
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] F Blaschke ldquoThe principle of field orientation as applied to thenew transvektor closed-loop control system for rotating-fieldmachinesrdquo Siemens Review vol 39 no 5 pp 217ndash220 1972
[2] H Tajima and Y Hori ldquoSpeed sensorless field-orientation con-trol of the induction machinerdquo IEEE Transactions on IndustryApplications vol 29 no 1 pp 175ndash180 1993
[3] Y C Luo and W X Chen ldquoSensorless stator field orientationcontrolled induction motor drive with fuzzy speed controllerrdquoComputers andMathematics with Applications vol 64 no 5 pp1206ndash1216 2012
[4] Y D Landau Adaptive Control The Model Reference Approachvol 8 Marcel Dekker New York NY USA 1979
[5] J Kennedy and R C Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 IEEE Perth Australia Decem-ber 1995
[6] C H Liu Control of AC Electrical Machines Tunghua TaipeiTaiwan 4th edition 2008 (Chinese)
[7] C Schauder ldquoAdaptive speed identification for vector controlof induction motors without rotational transducersrdquo IEEETransactions on Industry Applications vol 28 no 5 pp 1054ndash1061 1992
[8] R Eberhart and J Kennedy ldquoA New optimizer using particleswarm theoryrdquo in Proceedings of the 6th International Sympo-sium on Micro Machine and Human Science pp 39ndash43 IEEENagoya Japan October 1995
[9] Y Shi and R Eberhart ldquoModified particle swarm optimizerrdquoin Proceedings of the IEEE International Conference on Evolu-tionary Computation (ICEC rsquo98) pp 69ndash73 IEEE AnchorageAlaska USA May 1998
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

10 Mathematical Problems in Engineering
400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
Estim
ated
spee
d (r
adm
in) 400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
3
0
minus3
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 13 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 300 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
Estim
ated
spee
d (r
adm
in) 400
200
0
minus200
minus400
0 3 6 9 12
Time (s)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
2
0
minus2
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 14 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 300 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
Mathematical Problems in Engineering 11
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
1200
800
400
0
minus400
minus800
minus1200
(a)
0 3 6 9 12
Time (s)
1200
800
400
0
minus400
minus800
minus1200Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 15 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 900 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
1200
800
400
0
minus400
minus800
minus1200
(a)
0 3 6 9 12
Time (s)
1200
800
400
0
minus400
minus800
minus1200Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
3
0
minus3
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 16 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 900 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
12 Mathematical Problems in Engineering
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
6
0
minus6
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 17 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 18 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
Mathematical Problems in Engineering 13
estimator based MRAS scheme can accurately identifythe rotor-shaft speed on-line The speed controller designstrategy utilizing PSO algorithm obtained superior speedresponse The simulated and experimental responses at dif-ferent reversible steady-state speed commands (plusmn300 rpmplusmn900 rpm and plusmn1800 rpm) confirm the effectiveness of theproposed approach
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] F Blaschke ldquoThe principle of field orientation as applied to thenew transvektor closed-loop control system for rotating-fieldmachinesrdquo Siemens Review vol 39 no 5 pp 217ndash220 1972
[2] H Tajima and Y Hori ldquoSpeed sensorless field-orientation con-trol of the induction machinerdquo IEEE Transactions on IndustryApplications vol 29 no 1 pp 175ndash180 1993
[3] Y C Luo and W X Chen ldquoSensorless stator field orientationcontrolled induction motor drive with fuzzy speed controllerrdquoComputers andMathematics with Applications vol 64 no 5 pp1206ndash1216 2012
[4] Y D Landau Adaptive Control The Model Reference Approachvol 8 Marcel Dekker New York NY USA 1979
[5] J Kennedy and R C Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 IEEE Perth Australia Decem-ber 1995
[6] C H Liu Control of AC Electrical Machines Tunghua TaipeiTaiwan 4th edition 2008 (Chinese)
[7] C Schauder ldquoAdaptive speed identification for vector controlof induction motors without rotational transducersrdquo IEEETransactions on Industry Applications vol 28 no 5 pp 1054ndash1061 1992
[8] R Eberhart and J Kennedy ldquoA New optimizer using particleswarm theoryrdquo in Proceedings of the 6th International Sympo-sium on Micro Machine and Human Science pp 39ndash43 IEEENagoya Japan October 1995
[9] Y Shi and R Eberhart ldquoModified particle swarm optimizerrdquoin Proceedings of the IEEE International Conference on Evolu-tionary Computation (ICEC rsquo98) pp 69ndash73 IEEE AnchorageAlaska USA May 1998
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 11
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
1200
800
400
0
minus400
minus800
minus1200
(a)
0 3 6 9 12
Time (s)
1200
800
400
0
minus400
minus800
minus1200Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 15 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 900 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
1200
800
400
0
minus400
minus800
minus1200
(a)
0 3 6 9 12
Time (s)
1200
800
400
0
minus400
minus800
minus1200Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
3
0
minus3
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 16 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 900 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
12 Mathematical Problems in Engineering
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
6
0
minus6
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 17 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 18 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
Mathematical Problems in Engineering 13
estimator based MRAS scheme can accurately identifythe rotor-shaft speed on-line The speed controller designstrategy utilizing PSO algorithm obtained superior speedresponse The simulated and experimental responses at dif-ferent reversible steady-state speed commands (plusmn300 rpmplusmn900 rpm and plusmn1800 rpm) confirm the effectiveness of theproposed approach
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] F Blaschke ldquoThe principle of field orientation as applied to thenew transvektor closed-loop control system for rotating-fieldmachinesrdquo Siemens Review vol 39 no 5 pp 217ndash220 1972
[2] H Tajima and Y Hori ldquoSpeed sensorless field-orientation con-trol of the induction machinerdquo IEEE Transactions on IndustryApplications vol 29 no 1 pp 175ndash180 1993
[3] Y C Luo and W X Chen ldquoSensorless stator field orientationcontrolled induction motor drive with fuzzy speed controllerrdquoComputers andMathematics with Applications vol 64 no 5 pp1206ndash1216 2012
[4] Y D Landau Adaptive Control The Model Reference Approachvol 8 Marcel Dekker New York NY USA 1979
[5] J Kennedy and R C Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 IEEE Perth Australia Decem-ber 1995
[6] C H Liu Control of AC Electrical Machines Tunghua TaipeiTaiwan 4th edition 2008 (Chinese)
[7] C Schauder ldquoAdaptive speed identification for vector controlof induction motors without rotational transducersrdquo IEEETransactions on Industry Applications vol 28 no 5 pp 1054ndash1061 1992
[8] R Eberhart and J Kennedy ldquoA New optimizer using particleswarm theoryrdquo in Proceedings of the 6th International Sympo-sium on Micro Machine and Human Science pp 39ndash43 IEEENagoya Japan October 1995
[9] Y Shi and R Eberhart ldquoModified particle swarm optimizerrdquoin Proceedings of the IEEE International Conference on Evolu-tionary Computation (ICEC rsquo98) pp 69ndash73 IEEE AnchorageAlaska USA May 1998
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

12 Mathematical Problems in Engineering
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
6
0
minus6
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 17 Simulated responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Spee
d (r
adm
in)
(a)
2000
1000
0
minus1000
minus2000
0 3 6 9 12
Time (s)
Estim
ated
spee
d (r
adm
in)
(b)
05
05
0
0
minus05
minus05
fqs
fds
(c)
4
0
minus4
0 3 6 9 12
Time (s)
Estim
ated
Te
(N-m
)
(d)
Figure 18 Measured responses of MRAS sensorless RFOC IM dive with PSO algorithm speed controller design strategy with loading 2N-mat reversible steady-state speed command 1800 rpm (a) Command speed (blue line) and actual shaft speed (red line) (b) command speed(blue line) and estimated shaft speed (red line) (c) rotor flux linkage locus (d) estimated electromagnetic torque
Mathematical Problems in Engineering 13
estimator based MRAS scheme can accurately identifythe rotor-shaft speed on-line The speed controller designstrategy utilizing PSO algorithm obtained superior speedresponse The simulated and experimental responses at dif-ferent reversible steady-state speed commands (plusmn300 rpmplusmn900 rpm and plusmn1800 rpm) confirm the effectiveness of theproposed approach
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] F Blaschke ldquoThe principle of field orientation as applied to thenew transvektor closed-loop control system for rotating-fieldmachinesrdquo Siemens Review vol 39 no 5 pp 217ndash220 1972
[2] H Tajima and Y Hori ldquoSpeed sensorless field-orientation con-trol of the induction machinerdquo IEEE Transactions on IndustryApplications vol 29 no 1 pp 175ndash180 1993
[3] Y C Luo and W X Chen ldquoSensorless stator field orientationcontrolled induction motor drive with fuzzy speed controllerrdquoComputers andMathematics with Applications vol 64 no 5 pp1206ndash1216 2012
[4] Y D Landau Adaptive Control The Model Reference Approachvol 8 Marcel Dekker New York NY USA 1979
[5] J Kennedy and R C Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 IEEE Perth Australia Decem-ber 1995
[6] C H Liu Control of AC Electrical Machines Tunghua TaipeiTaiwan 4th edition 2008 (Chinese)
[7] C Schauder ldquoAdaptive speed identification for vector controlof induction motors without rotational transducersrdquo IEEETransactions on Industry Applications vol 28 no 5 pp 1054ndash1061 1992
[8] R Eberhart and J Kennedy ldquoA New optimizer using particleswarm theoryrdquo in Proceedings of the 6th International Sympo-sium on Micro Machine and Human Science pp 39ndash43 IEEENagoya Japan October 1995
[9] Y Shi and R Eberhart ldquoModified particle swarm optimizerrdquoin Proceedings of the IEEE International Conference on Evolu-tionary Computation (ICEC rsquo98) pp 69ndash73 IEEE AnchorageAlaska USA May 1998
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Mathematical Problems in Engineering 13
estimator based MRAS scheme can accurately identifythe rotor-shaft speed on-line The speed controller designstrategy utilizing PSO algorithm obtained superior speedresponse The simulated and experimental responses at dif-ferent reversible steady-state speed commands (plusmn300 rpmplusmn900 rpm and plusmn1800 rpm) confirm the effectiveness of theproposed approach
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper
References
[1] F Blaschke ldquoThe principle of field orientation as applied to thenew transvektor closed-loop control system for rotating-fieldmachinesrdquo Siemens Review vol 39 no 5 pp 217ndash220 1972
[2] H Tajima and Y Hori ldquoSpeed sensorless field-orientation con-trol of the induction machinerdquo IEEE Transactions on IndustryApplications vol 29 no 1 pp 175ndash180 1993
[3] Y C Luo and W X Chen ldquoSensorless stator field orientationcontrolled induction motor drive with fuzzy speed controllerrdquoComputers andMathematics with Applications vol 64 no 5 pp1206ndash1216 2012
[4] Y D Landau Adaptive Control The Model Reference Approachvol 8 Marcel Dekker New York NY USA 1979
[5] J Kennedy and R C Eberhart ldquoParticle swarm optimizationrdquoin Proceedings of the IEEE International Conference on NeuralNetworks vol 4 pp 1942ndash1948 IEEE Perth Australia Decem-ber 1995
[6] C H Liu Control of AC Electrical Machines Tunghua TaipeiTaiwan 4th edition 2008 (Chinese)
[7] C Schauder ldquoAdaptive speed identification for vector controlof induction motors without rotational transducersrdquo IEEETransactions on Industry Applications vol 28 no 5 pp 1054ndash1061 1992
[8] R Eberhart and J Kennedy ldquoA New optimizer using particleswarm theoryrdquo in Proceedings of the 6th International Sympo-sium on Micro Machine and Human Science pp 39ndash43 IEEENagoya Japan October 1995
[9] Y Shi and R Eberhart ldquoModified particle swarm optimizerrdquoin Proceedings of the IEEE International Conference on Evolu-tionary Computation (ICEC rsquo98) pp 69ndash73 IEEE AnchorageAlaska USA May 1998
Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of

Submit your manuscripts athttpwwwhindawicom
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttpwwwhindawicom
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
CombinatoricsHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom
Volume 2014 Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Stochastic AnalysisInternational Journal of



![A - 春日井市公式ホームページ...`ru_ a5 NX ZK~b£ íF~[>K~c 5WS"g Â_^~rM rS 1 Øv>K ~ iC\ ST ZKr:G\@6~rM : UbS g_ ©Õáî^][>K~b£ KZ6FrK{: >b\A](https://img.pdfslide.net/doc/110x75/5f591790ce9b8f1f3d729acb/a-fffff-ru-a5-nx-zkb-fkc-5wsg.jpg)