Embed Size (px)
Citation preview

Research ArticleSINS/CNS Nonlinear Integrated Navigation Algorithm forHypersonic Vehicle
Yong-jun Yu,1 Jin-fa Xu,1 and Zhi Xiong2
1 College of Aerospace Engineering, Nanjing University of Aeronautics and Astronautics, Jiangsu, Nanjing 210016, China2Navigation Research Center, Nanjing University of Aeronautics and Astronautics, Jiangsu, Nanjing 210016, China
Correspondence should be addressed to Yong-jun Yu; [email protected]
Received 27 August 2014; Accepted 1 November 2014
Academic Editor: Bin Jiang
Copyright © 2015 Yong-jun Yu et al. This is an open access article distributed under the Creative Commons Attribution License,which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
Celestial Navigation System (CNS) has characteristics of accurate orientation and strong autonomy and has been widely used inHypersonic Vehicle. Since the CNS location and orientation mainly depend upon the inertial reference that contains errors causedby gyro drifts and other error factors, traditional Strap-down Inertial Navigation System (SINS)/CNS positioning algorithm settingthe position error between SINS and CNS as measurement is not effective. The model of altitude azimuth, platform error angles,and horizontal position is designed, and the SINS/CNS tightly integrated algorithm is designed, in which CNS altitude azimuth isset as measurement information. GPF (Gaussian particle filter) is introduced to solve the problem of nonlinear filtering.The resultsof simulation show that the precision of SINS/CNS algorithm which reaches 130m using three stars is improved effectively.
1. Introduction
Hypersonic Vehicle (HV) which refers to a vehicle flyingat Mach 5 or above has already been the research focusin aeronautic and aerospace fields with its great strategicmilitary application values [1, 2].
Although Hypersonic Vehicle has many advantages, suchas large flight envelope, high maneuverability, and well pen-etrability, the dynamic model of an HV is fast time varyingand highly nonlinear because of itsMach numbers [3]. Large-scale variations of altitude and velocity lead to uncertaintiesin the aerodynamic parameters [4, 5]. As a result, HV isa highly nonlinear and uncertain system. Consequently, itis difficult to measure or estimate the dynamic state andcharacteristics of the vehicle [6]. Autonomous navigationsystem with high accuracy and reliability has been a majorconstraint on the improvement in performance of HV.
In recent years, owing to the development of microelec-tronics and computer technology, as well as the accuracyimprovement of Charge Coupled Device (CCD), ChargeInject Device (CID) star trackers, and inertial components,the Strap-down Inertial Navigation System (SINS) and Celes-tial Navigation System (CNS) are widely used in in aircrafts[7].
The celestial navigation method is a kind of autonomousnavigation technology which can determine the vehicle’sposition and attitude [8]. Since Celestial Navigation System(CNS) has characteristics of accurate orientation and strongautonomy, it has become an important component of inte-grated navigation system of HV [9].
The conventional celestial navigation utilizes the iner-tial navigation platform technology to realize the verticalvector and compute the vehicle’s navigation information bymeasuring the relative position changes between the verticalvector and the celestial vector.The navigation accuracy of thismethod depends largely on the accuracy of horizontal refer-ence and celestial sensormeasurements [10]. CNSusually getsthe inertial horizon reference by inertial navigation platform.Considering that the strap-down type replacing the platformtype has been the development trend of INS, it has becomeextremely difficult to improve the accuracy of the inertialhorizon references due to the impact of INS core instruments(gyros and accelerometers) error [11].
In traditional SINS/CNS integrated mode, CNS utilizesthe position and attitude information of INS to calculatecelestial positions and heading attitude and then realizeperiodic correction of the INS drifts. This mode can damp
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2015, Article ID 903054, 7 pageshttp://dx.doi.org/10.1155/2015/903054

2 Mathematical Problems in Engineering
Table 1: Comparison of SINS/CNS navigation error.
Error 𝛿V/m/s 𝛿𝑝/m𝛿V𝑒
𝛿V𝑛
𝛿𝜆 𝛿𝐿
One star 0.21 −0.76 737.7 842.6Two stars 0.13 −0.38 161.2 89.5Three stars −0.10 −0.10 108.9 72.6
118
120
122
124
20
30
40
1
1.2
1.4
1.6
1.8
×104
𝜆 (deg)L (deg)
H(m
)
Figure 1: Simulation trace.
the divergence of INS position errors; however, since the CNSlocation and orientation mainly depend upon the inertialreference that contains errors caused by gyro drifts and othererror factors, this postcorrection method is not effective.
A number of classical approaches, the Kalman filter(KF), extended Kalman filter (EKF), unscented Kalmanfilter (UKF), particle filtering (PF), and so forth, have beenproposed to the information fusion. Kalman filtering iscommonly used algorithms for information integration. Aprerequisite for using Kalman filter is that the system dynam-ics and noise statistics are known [12]. But considering theHV is a highly nonlinear system, the dynamic characteristicsof the HV and external environment make these premiseconditions often not met.
PF can effectively solve the problem of nonlinear filtering[13, 14]. However, its limitation is obvious.
(1) PF occasionally has the particle impoverishment (PI)problem that results from resampling process [15].
(2) The number of particles will increase at a rapid ratealong with the increase of the system dimensions.
The Gaussian PF avoids the PI problem that is thedisadvantageous feature of PF in the estimation of a staticparameter. Furthermore, resampling process is not requiredin the GPF algorithm. Therefore, its computational com-plexity (CC) is significantly reduced compared to particlefiltering.
This paper will carry out the research on the SINS/CNSintegrated navigation algorithm for the HV. In order toimprove the accuracy and reliability of SINS/CNS integrated
0 1000 2000 3000 4000118
119
120
121
122
123
Time (s)
𝜆(d
eg)
Figure 2: Simulation longitude.
0 1000 2000 3000 4000Time (s)
A
B
C
−5
0
5
10
15
×10−3
𝛿𝜆
(deg
)
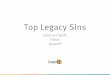
Figure 3: Compression of longitude error.
systems, the scheme and algorithm of airborne SINS/CNSintegrated navigation based on celestial angle observationhave been presented.The theory of SINS/CNS integrated nav-igation system based on celestial altitude angle observationinformation has been discussed adequately; a model withcelestial altitude angle, platform error angles, and horizontalposition is deduced. Meanwhile, a new SINS/CNS tightlyintegrated localization algorithm using Gaussian particlefilter (GPF) is presented, which makes full use of SINS andCNS navigation information to achieve higher accuracy ofthe SINS/CNS integration.
2. SINS/CNS Tightly Integrated NavigationModel

Mathematical Problems in Engineering 3
0 1000 2000 3000 4000Time (s)
A
B
C
−5
0
5
10
15
×10−3
𝛿L
(deg
)
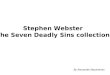
Figure 4: Compression of latitude error.
0 1000 2000 3000 4000Time (s)
KF GPF
−5
0
5
10
15
×10−3
𝛿𝜆
(deg
)
Figure 5: Compression of longitude error.
2.1. The Model of CNS Measurement. The basic principle ofastronomical positioning is given by
sinℎ𝑝= sin𝛿
𝐴sin𝐿 + cos𝛿
𝐴cos𝐿cos (𝑡
𝐺+ 𝜆) , (1)
where ℎ𝑝is the observed altitude angle of the navigational
stars in Local-Level Frame. 𝜆, 𝐿 are longitude and latitude;𝛿𝐴, 𝑡𝐺are the declination and Greenwich hour angle.
According to (1), using longitude and latitude informa-tion from SINS, the computed altitude angle ℎ
𝑙in Local-Level
Frame is received as
sinℎ𝑙= sin𝐿
𝑠sin𝛿𝐴+ cos𝐿
𝑠cos𝛿𝐴cos (𝜆
𝑠+ 𝑡𝐺) , (2)
where 𝐿𝑠, 𝜆𝑠are latitude and longitude from SINS, and
ℎ𝑙= ℎ𝑝+ 𝛿ℎ, 𝐿
𝑠= 𝐿 + 𝛿𝐿, 𝜆
𝑠= 𝜆 + 𝛿𝜆. (3)
0 1000 2000 3000 4000Time (s)
KF
GPF
−5
0
5
10
15
×10−3
𝛿L
(deg
)
Figure 6: Compression of latitude error.
By using first order approximation of Taylor expansion,(3) can be expressed as
sinℎ𝑙= sin𝐿sin𝛿
𝐴+ cos𝛿
𝐴cos𝐿cos (𝑡
𝐺+ 𝜆)
+ (cos𝐿sin𝛿𝐴− cos𝛿
𝐴cos𝑡𝐺sin𝐿cos𝜆
+cos𝛿𝐴sin𝑡𝐺sin𝜆sin𝐿) ⋅ Δ𝐿
− (cos𝛿𝐴sin𝑡𝐺cos𝐿cos𝜆
+cos𝛿𝐴cos𝑡𝐺cos𝐿sin𝜆) ⋅ Δ𝜆.
(4)
According to (1) and (4), the relation between computedaltitude angle ℎ
𝑙and observed altitude angle ℎ
𝑝can be
expressed as follows:
sinℎ𝑙− sinℎ
𝑝= 𝛼1⋅ Δ𝜆 + 𝛽
1⋅ Δ𝐿, (5)
where
𝛼1= −cos𝛿
𝐴cos𝑡𝐺sin𝜆cos𝐿
− cos𝛿𝐴sin𝑡𝐺cos𝜆cos𝐿,
𝛽1= sin𝛿
𝐴cos𝐿 − cos𝛿
𝐴cos𝑡𝐺cos𝜆sin𝐿
+ cos𝛿𝐴sin𝑡𝐺sin𝜆sin𝐿.
(6)
Since CNS gets the inertial horizon reference by SINS, wecan not get the observed altitude angle in Local-Level Framein (1) but the observed altitude angle ℎ
𝑐in Computational
Frame.The celestial vector in Local-Level Frame can be set as
X𝑝= [cosℎ
𝑝sin𝐴𝑝
cosℎ𝑝cos𝐴𝑝
sinℎ𝑝]𝑇
. (7)
The celestial vector in Computational-Level Frame can beset as
X𝑐= [cosℎ
𝑐sin𝐴𝑐cosℎ𝑐cos𝐴𝑐sinℎ𝑐]𝑇
. (8)

4 Mathematical Problems in Engineering
The relationship between Computational Frame andLocal-Level Frame can be expressed as follows:
X𝑃= C𝑝𝑐X𝑐, (9)
where C𝑝𝑐= [
1 −𝜙𝑢𝜙𝑛
𝜙𝑢1 −𝜙
𝑒
−𝜙𝑛𝜙𝑒1
], and 𝜙𝑒, 𝜙𝑛, 𝜙𝑢are east, north, and
up platform angle error.From (7)∼(9),
sinℎ𝑝= sinℎ
𝑐− 𝜙𝑛× cosℎ
𝑐sin𝐴𝑐+ 𝜙𝑒× cosℎ
𝑐cos𝐴𝑐. (10)
According to (5) and (10), the relationship betweencomputed altitude angle ℎ
𝑙in Local-Level Frame and the
observed altitude angle ℎ𝑐in Computational Frame can be
expressed as follows:
sinℎ𝑙− sinℎ
𝑐= 𝛼1⋅ Δ𝜆 + 𝛽
1⋅ Δ𝐿
− 𝜙𝑛× cosℎ
𝑐sin𝐴𝑐+ 𝜙𝑒× cosℎ
𝑐cos𝐴𝑐.
(11)
2.2. Equation of State of SINS/CNS Integrated Algorithm. Thenavigation frame is chosen as east-north-upward geographicframe. The 𝑋-𝑌-𝑍 direction of the body frame is coincidentwith the Right-Front-Upward direction of the vehicle body.
The state equations are described as
X (𝑡) = F (X (𝑡) ,W (𝑡)) , (12)
where X(𝑡) is the state variables vector, and
𝑋 (𝑡) = [𝛿𝑞0, 𝛿𝑞1, 𝛿𝑞2, 𝛿𝑞3𝛿𝑉𝐸𝛿𝑉𝑁
𝛿𝑉𝑈
𝛿𝐿 𝛿𝜆 𝛿ℎ 𝜀𝑏𝑥
𝜀𝑏𝑦
𝜀𝑏𝑧
∇𝑥∇𝑦∇𝑧]𝑇 (13)
𝜀𝑏𝑥, 𝜀𝑏𝑦, 𝜀𝑏𝑧are single-orderMarkov errors of three gyros,∇
𝑎𝑥,
∇𝑎𝑦, ∇𝑎𝑧
are single-order Markov errors of three accelerome-ters, and
𝛿��𝑏
𝑖𝑏= [ 𝜀𝑏𝑥
𝜀𝑏𝑦
𝜀𝑏𝑧]𝑇
= −1
𝑇𝜔
𝛿𝜔𝑏
𝑖𝑏+ 𝜎𝜔(𝑡) ,
∇
𝑏
= [∇𝑥∇𝑦∇𝑧]𝑇
= −1
𝑇∇
∇
𝑏
+ 𝜎∇(𝑡) .
(14)
F is the system matrix, W(𝑡) is the system noise matrix,andW(𝑡) = [𝜎
𝜔(𝑡) 𝜎∇(𝑡)].
The attitude equation in the form of a quaternion iswritten as
Q𝑛𝑏=1
2[Q𝑛𝑏]𝜔𝑏
𝑛𝑏=1
2⟨𝜔𝑏
𝑖𝑏⟩Q𝑛𝑏−1
2[𝜔𝑛
𝑖𝑛]Q𝑛𝑏, (15)
where Q𝑛𝑏= [𝑞0𝑞1𝑞2𝑞3]𝑇, 𝜔𝑏𝑖𝑏the vehicle body angular
rate measured by gyros in the body frame,
[𝜔𝑏
𝑖𝑏] =
[[[[[
[
0 −𝜔𝑥−𝜔𝑦−𝜔𝑧
𝜔𝑥
0 𝜔𝑧
−𝜔𝑦
𝜔𝑦−𝜔𝑧
0 𝜔𝑥
𝜔𝑧
𝜔𝑦
−𝜔𝑥
0
]]]]]
]
, (16)
𝜔𝑛
𝑖𝑛= 𝜔𝑛
𝑖𝑒+ 𝜔𝑛
𝑒𝑛, and 𝜔𝑛
𝑖𝑒is the projection of the earth
rotation rate in the navigation frame.𝜔𝑛𝑒𝑛is angular rate of the
navigation framewith respect to the earth frame, expressed inthe navigation frame:
⟨𝜔𝑛
𝑖𝑛⟩ =
[[[[[
[
0 −𝜔𝑒−𝜔𝑛−𝜔𝑢
𝜔𝑒
0 −𝜔𝑢
𝜔𝑛
𝜔𝑛
𝜔𝑢
0 −𝜔𝑒
𝜔𝑢−𝜔𝑛
𝜔𝑒
0
]]]]]
]
. (17)
The definition of the quaternion error between realquaternion and calculated quaternion is
𝛿Q = Q𝑛𝑏−Q𝑛𝑏, (18)
where 𝛿Q = [𝛿𝑞0, 𝛿𝑞1, 𝛿𝑞2, 𝛿𝑞3]𝑇, Q𝑛𝑏is calculated quater-
nion, and Q𝑛𝑏is real quaternion.
The dynamic vector equation of quaternion error can bepresented as
𝛿Q =1
2⟨𝜔𝑏
𝑖𝑏⟩ 𝛿Q −
1
2[𝜔𝑛
𝑖𝑛] 𝛿Q +
1
2U (Q) 𝛿𝜔𝑏
𝑖𝑏
−1
2Y (Q) 𝛿𝜔𝑛
𝑖𝑛,
(19)
where 𝛿𝜔𝑛𝑖𝑛= 𝛿𝜔𝑛
𝑖𝑒+ 𝛿𝜔𝑛
𝑒𝑛, and
Y (Q) =[[[[[
[
−𝑞1−𝑞2−𝑞3
𝑞0
𝑞3
−𝑞2
−𝑞3
𝑞0
𝑞1
𝑞2
−𝑞1
𝑞0
]]]]]
]
, U (Q) =[[[[[
[
−𝑞1−𝑞2−𝑞3
𝑞0
−𝑞3
𝑞2
𝑞3
𝑞0
−𝑞1
−𝑞2
𝑞1
𝑞0
]]]]]
]
.
(20)

Mathematical Problems in Engineering 5
Dynamic vector equation of velocity errors can beexpressed as
𝛿V = ΔQ𝑛𝑏f𝑏+Q𝑛𝑏∇𝑏
− (2𝜔𝑛
𝑖𝑒+ 𝜔𝑛
𝑒𝑛) × 𝛿V
+ (V + 𝛿V) × (2𝛿𝜔𝑛𝑖𝑒+ 𝛿𝜔𝑛
𝑒𝑛) ,
(21)
where 𝛿V = [𝛿𝑉𝐸, 𝛿𝑉𝑁, 𝛿𝑉𝑈], and f
𝑏represents the specific
force measured by the three accelerometers in the bodyframe.
Dynamic equation of position errors can be expressed as
𝛿�� =𝛿𝑉𝑁
𝑅𝑀+ ℎ
−𝑉𝑁
(𝑅𝑀+ ℎ)2𝛿ℎ,
𝛿�� =𝛿𝑉𝐸
𝑅𝑁+ ℎ
sec𝐿 + 𝑉𝐸
𝑅𝑁+ ℎ
𝑡𝑔𝐿sec𝐿𝛿𝐿 − 𝑉𝐸sec𝐿𝛿ℎ
(𝑅𝑁+ ℎ)2,
𝛿ℎ = 𝛿𝑉𝑈,
(22)
where 𝑅𝑀, 𝑅𝑁are the earth curvature radius.
From (11), the measurement equation with one naviga-tional star can be set as
Z (𝑡) = sinℎ𝑙− sinℎ
𝑐. (23)
If there is more than one navigational star, the measure-ment equation can be set as
Z (𝑡) =[[[[
[
sinℎ𝑙1− sinℎ
𝑐1
.
.
.
sinℎ𝑙𝑛− sinℎ
𝑐𝑛
]]]]
]
= H (𝑡)X (𝑡) + V (𝑡) , (24)
where H(𝑡) is the matrix that reflects the relations betweenX(𝑡) and Z(𝑡), V(𝑡) is the noise vector of the measurementinformation, and
V (𝑡) =
[[[[
[
sin𝛿ℎ1
.
.
.
sin𝛿ℎ𝑛
]]]]
]
. (25)
According to (12) and (24), the system equations aredescribed as
X (𝑡) = F (X (𝑡) ,W (𝑡)) ,
Z (𝑡) = H (𝑡)X (𝑡) + V (𝑡) .
(26)
3. SINS/CNS Gaussian Particle FilterAlgorithm
The GPF approximates the filtering and predictive densitiesby Gaussian distributions in a PF framework.TheGPF recur-sively updates only the posterior mean and the covariance ofthe parameter of interest. The basic idea of PF is to representa density by generated samples and their associated weights.The following shows the approximation of a filtering densityby particles and their weights.
The equations of nonlinear system model are defined asfollows:
x𝑘= 𝑓 (x
𝑘−1,𝜔𝑘−1
) ,
z𝑘= ℎ (x
𝑘, v𝑘) .
(27)
GPF can be described as the following two steps.
Measurement Update. Generate the sample particles follow-ing
x𝑖𝑘∼ 𝑞 (x𝑖
𝑘| z0:𝑘) , (28)
where 𝑞(⋅) is the importance sampling function, 𝑖 = 1 : 𝑀,and𝑀 is the particle number.
And the weights can be approximated by the following:
𝜔𝑖
𝑘∝
𝑝(z𝑘| x𝑖𝑘)𝑁 (x𝑖
𝑘; 𝜇𝑘; Σ𝑘)
𝑞 (x𝑖𝑘| z0:𝑘)
, (29)
where 𝑝(⋅) is the filtering density, and 𝜇𝑘, Σ𝑘are obtained by
sample mean and covariance of the particles generated in theprevious time update step.
Then compute the 𝜇𝑘, Σ𝑘following
𝜇𝑘=
𝑀
∑
𝑖=1
𝜔𝑖
𝑘𝑥𝑖
𝑘,
Σ𝑘=
𝑀
∑
𝑖=1
𝜔𝑖
𝑘(𝜇𝑘− 𝑥𝑖
𝑘) (𝜇𝑘− 𝑥𝑖
𝑘)𝑇
.
(30)
Time Update. Generate x𝑖𝑘|𝑘+1
and compute x𝑖𝑘+1|𝑘+1
:
x𝑖𝑘|𝑘+1
∼ 𝑁(x𝑖𝑘; 𝜇𝑘; Σ𝑘) ,
x𝑖𝑘+1|𝑘+1
∼ 𝑝 (x𝑘+1
| x𝑖𝑘|𝑘+1
) .
(31)
Then compute the 𝜇𝑘+1
, Σ𝑘+1
following
𝜇𝑘+1
=1
𝑀
𝑀
∑
𝑖=1
𝑥𝑖
𝑘+1,
Σ𝑘+1
=1
𝑀
𝑀
∑
𝑖=1
(𝜇𝑘+1
− 𝑥𝑖
𝑘+1) (𝜇𝑘+1
− 𝑥𝑖
𝑘+1)𝑇
.
(32)
According to (26), the state equation is nonlinear and themeasurement equation is linear; the measurement update ofGPF can be estimated by Kalman filter. Thus, (29) and (30)can be simplified as follows:
K𝑘= Σ𝑘H𝑇𝑘[H𝑘Σ𝑘H𝑇𝑘+ R𝑘]−1
,
𝜇𝑘= 𝜇𝑘+ K𝑘[z𝑘−H𝑘𝜇𝑘] ,
Σ𝑘= [I − K
𝑘H𝑘]Σ𝑘.
(33)
The GPF flow chart for (26) is given as follows.

6 Mathematical Problems in Engineering
Step 1. Consider
x𝑖𝑘∼ 𝑞 (x𝑖
𝑘| z0:𝑘) = 𝑁(x𝑖
𝑘; 𝜇𝑘; Σ𝑘) . (34)
Step 2. Consider
K𝑘= Σ𝑘H𝑇𝑘[H𝑘Σ𝑘H𝑇𝑘+ R𝑘]−1
,
𝜇𝑘= 𝜇𝑘+ K𝑘[z𝑘−H𝑘𝜇𝑘] ,
Σ𝑘= [I − K
𝑘H𝑘]Σ𝑘.
(35)
Step 3. Consider
x𝑖𝑘|𝑘+1
∼ 𝑁(x𝑖𝑘; 𝜇𝑘; Σ𝑘) ,
x𝑖𝑘+1|𝑘+1
∼ 𝑝 (x𝑘+1
| x𝑖𝑘|𝑘+1
) .
(36)
Step 4. Consider
𝜇𝑘+1
=1
𝑀
𝑀
∑
𝑖=1
𝑥𝑖
𝑘+1,
Σ𝑘+1
=1
𝑀
𝑀
∑
𝑖=1
(𝜇𝑘+1
− 𝑥𝑖
𝑘+1) (𝜇𝑘+1
− 𝑥𝑖
𝑘+1)𝑇
.
(37)
4. Simulation and Analysis
Theproposed algorithm is testified by the designed track.Thedrift of equivalent gyros in inertial navigation system is setto 0.1∘/h, the drift of equivalent accelerometer is 10−4 g, andthe period of SINS algorithm is 5ms.The navigation stars areAlioth, Arcturus, and Dubhe. The error of star sensor is 10arc-second, and the period of CNS is 1.0 s; the period of theGPF is 1.0 s.
The track is set as showed in Figure 1. The longitude is setas showed in Figure 2.
The errors of longitude and latitude are given as in Figures3 and 4.
In Figures 3 and 4, “A” represents the results of onenavigation star and “B” and “C” represent two and threenavigation stars.
In Figures 3 and 4, when there are more navigation stars,the position error is smaller. The mean square error averageis shown in Table 1.
Test results indicate that the precision of position is about1100m with one star. The precision of position using threestars can reach 130m, which indicate that the method inthe paper can improve the precision of navigation systemeffectively.
The comparison of GPF and KF using three stars is givenin Figures 5 and 6.
Through Figures 5 and 6, both KF and GPF can conver-gence fast, but the accuracy of GPF is higher, and the steadyaccuracy is less influenced by the carrier mobility.
5. Conclusion
The SINS/CNS navigation system is an importantautonomous navigation technology of HV for its accurate
orientation and strong autonomy. Traditional SINS/CNSintegrated mode, which uses celestial positions correctingthe SINS drifts, is not effective because the CNS locationmainly depends upon the inertial reference that containserrors caused by gyro drifts. In this paper, the theory ofSINS/CNS integrated navigation system based on celestialangle observation information has been proposed forHV. The model with altitude angle, platform error angles,and horizontal position is deduced; the SINS/CNS tightlyintegrated localization algorithm using GPF is presented.TheSINS/CNS algorithm is of important value in engineeringapplication.
Conflict of Interests
The authors declare that there is no conflict of interestsregarding the publication of this paper.
Acknowledgments
Yong-jun Yu is supported by China Postdoctoral ScienceFoundation Funded Project (2013M541668); Jiangsu Post-doctoral Science Foundation (1401041B); National NaturalScience Foundation of China (Grant No. 61374115); PAPD.
References
[1] X. Luo and J. Li, “Fuzzy dynamic characteristic model basedattitude control of hypersonic vehicle in gliding phase,” ScienceChina: Information Sciences, vol. 54, no. 3, pp. 448–459, 2011.
[2] P. Wang, G. Tang, L. Liu, and J. Wu, “Nonlinear hierarchy-structured predictive control design for a generic hypersonicvehicle,” Science China Technological Sciences, vol. 56, no. 8, pp.2025–2036, 2013.
[3] B. Xu, D. Gao, and S. Wang, “Adaptive neural control based onHGO for hypersonic flight vehicles,” Science China, vol. 54, no.3, pp. 511–520, 2011.
[4] F. R. Chavez and D. K. Schmidt, “Analytical aeropropul-sive/aeroelastic hypersonic-vehicle model with dynamic anal-ysis,” Journal of Guidance, Control, and Dynamics, vol. 17, no. 6,pp. 1308–1319, 1994.
[5] M. A. Bolender and D. B. Doman, “A non-linear model for thelongitudinal dynamics of a hypersonic air-breathing vehicle,”AIAA Paper 2005-6255, 2005.
[6] H. Xu, M. D. Mirmirani, and P. A. Ioannou, “Adaptive slidingmode control design for a hypersonic flight vehicle,” AIAAJournal of Guidance, Control, and Dynamics, vol. 27, no. 5, pp.829–838, 2004.
[7] P. M. Janiczek, “STELLA: toward automated celestial naviga-tion,” Surface Warfare, vol. 21, no. 2, pp. 34–37, 1996.
[8] X. Chen, “Investigation on celestial/inertial integrated naviga-tion patterns,” Optics and Optoelectronic Technology, vol. 1, no.3, pp. 21–24, 2003.
[9] C. C. Liebe, “Accuracy performance of star trackers—a tutorial,”IEEE Transactions on Aerospace and Electronic Systems, vol. 38,no. 2, pp. 587–599, 2002.
[10] A.-G. Wang, “Modern celestial navigation and the key tech-niques,” Acta Electronica Sinica, vol. 35, no. 12, pp. 2347–2353,2007.

Mathematical Problems in Engineering 7
[11] G. X. Shen and J. F. Sun, Application of Data Fusion Theory inSINS/CNS/GPS Integrated Navigation Systems, Defence Indus-try Press, Beijing, China, 2010.
[12] T. Gao, H. Ge, J. Rao, Z. Gong, and J. Luo, “Design of doubleducted tilting SUAV navigation system based on multi-sensorinformation fusion,” in Proceedings of the IEEE InternationalConference on Multisensor Fusion and Integration for IntelligentSystems (MFI ’12), pp. 439–444,Hamburg,Germany, September2012.
[13] G. Oppenheim, A. Philippe, and J. de Rigal, “The particle filtersand their applications,”Chemometrics and Intelligent LaboratorySystems, vol. 91, no. 1, pp. 87–93, 2008.
[14] M. Tanaka, “Reformation of particle filters in simultaneouslocalization and mapping problems,” International Journal ofInnovative Computing, Information and Control, vol. 5, no. 1, pp.119–128, 2009.
[15] M. S. Arulampalam, S. Maskell, N. Gordon, and T. Clapp, “Atutorial on particle filters for online nonlinear/non-Gaussianbayesian tracking,” IEEE Transactions on Signal Processing, vol.50, no. 2, pp. 174–188, 2002.

Submit your manuscripts athttp://www.hindawi.com
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttp://www.hindawi.com
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
CombinatoricsHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
International Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
The Scientific World JournalHindawi Publishing Corporation http://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com
Volume 2014 Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Stochastic AnalysisInternational Journal of