Embed Size (px)
Citation preview

Research ArticleSpherical Pendulum Small Oscillations forSlewing Crane Motion
Alexander V Perig1 Alexander N Stadnik2 and Alexander I Deriglazov2
1 Manufacturing Processes and Automation Engineering Department Engineering Automation FacultyDonbass State Engineering Academy Shkadinova 72 Donetsk Region Kramatorsk 84313 Ukraine
2Department of Technical Mechanics Engineering Automation Faculty Donbass State Engineering Academy Shkadinova 72Donetsk Region Kramatorsk 84313 Ukraine
Correspondence should be addressed to Alexander V Perig olexanderperiggmailcom
Received 29 August 2013 Accepted 2 October 2013 Published 9 January 2014
Academic Editors N-I Kim M Seddeek and M Zappalorto
Copyright copy 2014 Alexander V Perig et al This is an open access article distributed under the Creative Commons AttributionLicense which permits unrestricted use distribution and reproduction in any medium provided the original work is properlycited
The present paper focuses on the Lagrange mechanics-based description of small oscillations of a spherical pendulum with auniformly rotating suspension center The analytical solution of the natural frequenciesrsquo problem has been derived for the caseof uniform rotation of a crane boom The payload paths have been found in the inertial reference frame fixed on earth and in thenoninertial reference frame which is connected with the rotating crane boomThe numerical amplitude-frequency characteristicsof the relative payloadmotion have been foundThemechanical interpretation of the terms in Lagrange equations has been outlinedThe analytical expression and numerical estimation for cable tension force have been proposed The numerical computationalresults which correlate very accurately with the experimental observations have been shown
1 Introduction
The solution of nonlinear differential equations for sphericalpendulum swaying requires the introduction of modernnumerical computational analysis techniques Such computertechniques allow us to produce approximate solutions of theposed problemsHowever the linearizedmodels for sphericalpendulum small swaying motion provide a clear mechanicalexplanation and the first numerical approximation of thecomplex spherical motion problems This fact confirms thesignificance of the small oscillation problems for the modernfield of lifting-and-transport machines A series of modernresearch efforts [1ndash22] have been focused on the solution of aspherical pendulum with moving pivot center
Abdel-Rahman and Nayfeh [1] have studied the dynamicproblem for a ldquocrane boom tip-payloadrdquo mechanical systemfocused on the reduction of payload lateral vibrations byreeling and unreeling the hoist cable In this work theauthors have derived two- and three-dimensional models fora spherical pendulum taking into account the linearity oftransport motion
Adamiec-Wojcik et al [2] have provided a numericalfinite-element simulation of the supporting frame of anoffshore crane portal construction Within the proposedmodel supporting frame elastic oscillations define both thepayload motion and the displacements of the suspensioncenter with a payload on the cable The derived model alsoincorporates ship vibration motion
Aston has obtained two independent motion equationsfor a spherical pendulum taking into account viscous frictioneffects This model neglects the components of the Coriolisinertia force [3]
Betsch et al [4] have described rotary crane dynam-ics in terms of redundant coordinates with an introduc-tion of differential-algebraic equations (DAEs) The authorsrsquoapproach focused on the simultaneous incorporation of alarge total number of redundant coordinates and the augmen-tation constraints do not fully describe the particular cases ofrotary crane dynamics
Blajer and Kołodziejczyk [5] have derived governingDAE equations for the open-loop control formulation thatforces the underactuated crane system to complete the partly
Hindawi Publishing Corporatione Scientific World JournalVolume 2014 Article ID 451804 10 pageshttpdxdoiorg1011552014451804
2 The Scientific World Journal
specified motion It is necessary to note that this paper dealsprimarily with controlled in-plane motions of the crane sys-tem with linear transport motion Blajer and Kołodziejczyk[6] have investigated the control of underactuated cranemechanical systems with servo constraints This work takesinto account the restoring load gravity force in the horizontalplane However the derived mathematical model assumesprimarily linear transportmotionwithout theCoriolis inertiaforce Blajer and Kołodziejczyk [7] have presented a concep-tual research article focused on the building of n-index DAEsystems for a relevant dynamic description of partly specifiedcrane system motion Blajer and Kołodziejczyk [8] haveintroduced a carefully argued computational technique fornumerical simulation of cranes based on the use of dependentcoordinates The advantages of dependent coordinatesrsquo usagehave been outlined It is necessary to note that with each newresearch effort the authors apply much more sophisticatedcomputational methods and derive more exact governingdynamic equations However this paper is also based onthe same simple pendulum model as the first approacheswherein the Coriolis inertia force and the restoring loadgravity force are ignored Blajer et al [9] have simulated atwo-tier framed human arm model with segments of equallength The application of this model seems to be veryuseful for the dynamic analysis of a swaying load in thehorizontal plane during rotation of a crane boom Blajer andKołodziejczyk [10] have developed improved DAE equationsfor more precise rotary crane dynamics simulation Butadditional dimensional analysis for the explicit forms of thegoverning equations would greatly enhance the work
Cha et al [11] have applied a topological modelingapproach to a dynamic simulation of multiple floating cranesin shipyards taking into account crane boom oscillations
Ellermann et al [12] have introduced the vector ofgeneralized gyroscopic andCoriolis forces for amathematicaldescription of nonlinear dynamics of floating cranes Thiswork used a comprehensivemodel with a set of 20 differentialequations but does not allow proper analysis of particularcases of floating jib crane-load system motions
Erneux and Kalmar-Nagy [13] have proposed a planependulum container crane model with linear transport trol-ley motion This model illustrates linear displacement of theplane pendulum suspension center
Glossiotis and Antoniadis [14] have derived a four-degrees-of-freedom (4DOF) model for the rotary cranesystem incorporating both hoisting and slewing payloadmotions and thus is able to handle cases where hoisting canbe simultaneously applied to the rotary motion
Ibrahim [15] has studied the issues of multiplicative noiseand noise-enhanced stability of spherical pendulums
Kortelainen andMikkola [16] have introduced data man-agement techniqueswithin an approachusing a semantic datamodel for payload oscillation problems
Mitrev [17] has applied his generalized approach with theintroduction of an inertia force vector to the case of lineartransport motion of the pendulum pivot center Grigorovand Mitrev [18] have investigated a spherical pendulumdynamic model for a numerical solution of a freely sus-pended swinging load problem They have derived absolute
trajectories of both the pendulum suspension center and theswinging load
Osinski andWojciech [19] have analyzed the hoistmotionof a mechanical system consisting of a load hoist rope andelastic crane jib This study mainly deals with rectilinear loadoscillations and lateral crane jib vibrations
Ren et al [20] have used a mixed approach combin-ing both analytical and finite-element techniques for theLagrangian function of a mechanical system They havedetermined the relations between load swaying crane boomflexibility and wave motions Schaub [21] has implemented arate-based ship-mounted crane payload pendulation controlsystem This research is focused on a kinematic approach topayload stabilizationwith an emphasis on the usage of inertialmeasurement unit (IMU) information
Uchiyama [22] has applied control theory techniques for arobust crane controller design that provides robustness withrespect to changes in cable length and transported payloadmass without iterative computations
At the same time these known articles [1ndash22] do not dojustice to load swaying descriptions using Coriolis effects inrelative motion The present paper focuses on these issues
The present paper focuses on the Lagrange mechanics-based description of small oscillations for a spherical pendu-lum with a uniformly rotating suspension center
The prime novelty statement of the present paper isbased on the rational introduction of a Cartesian coordinatesystem for study of small relative swaying of a payload andsubstantiation of uniformity of crane boom rotation
2 Kinematic Analysis
In order to solve the problem we introduce the Lagrangeequations for the motion of the mechanical system ldquocraneboom 119861119874
2-load119872rdquo which is shown in Figure 1
The computational scheme in Figure 1 may be describedwith an introduction of three degrees of freedom For gen-eralized coordinates we assume the rectangular coordinates119909 119910 and 119911 of the load and the angle 120593
119890= 120596119890119905 of crane
boom 1198611198742uniform rotation in the horizontal plane (119909119910)
with the constant angular velocity 120596119890around the vertical
axis 11987421199112 We denote the fixed inertial coordinate system
as 119909211991021199112and the moving noninertial frame of reference as
119909111991011199111 which is rigidly bounded with the crane boom 119861119874
2
Rotation of themoving noninertial frame of reference 119909111991011199111
around the fixed inertial coordinate system 119909211991021199112defines
the transportation motion The motion of load119872 relative tothe moving noninertial frame of reference 119909
111991011199111defines the
relative motionThe scalar of the load119872 transportation velocity is defined
as 119881119890
= 120596119890sdot 1198742119872 and transportation velocity vector V
119890
is perpendicular to O2M that is the scalar product(V119890O2M) = 0 (Figure 1) The relative velocity vector V
119903of
the load 119872 is defined as V119903= (119889119909
1119889119905 119889119910
1119889119905 119889119911
1119889119905) in
Figure 1 In the initial time 119905 = 0 load119872 has the vertical 119861119860stin-line position that is the load119872 initial position coincideswith the static equilibrium position119860 st for the load119872 on thecable119872119861
The Scientific World Journal 3
z2
z1
y2
y1
O2
O1
x2
x1
120593e
1205722
1205721
Adyn
Ast
= d120593edt
H
D
l
R
B
Δ
x
y
M
O
z
120579
rarrVr
rarrVe
rarr120596e120596e
rarrN
mrarrg
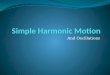
Figure 1 Computational spatial scheme of spherical pendulum119872 swaying on the cable119872119861 during crane boom 1198611198742slewing motion for the
linearized model derivation in Cartesian coordinates
At time 119905 = 0 the load 119872 has zero absolute velocity andthe initial relative velocity is 119881
119903119909(0) = +120596
119890sdot 119861119863 (Figure 1)
In Figure 1 we denote the angle 120579 which is the currentangle 119860 st1198742119872 that is the angle between the axis 119910
1and
the radius-vector O2M where sin(120579) = 11990911198742119872 cos(120579) =
(119877+1199101)1198742119872The vertical coordinate 119911
1in Figure 1 is defined
as 1199111= 119897 minus 119897 sdot cos(120572
1) where 120572
1is the angle between the cable
119872119861 and the verticalFor small angles 120572
1 the projections of the absolute
velocity vector may be written as
1198811199091
= (1198891199091
119889119905) minus 119881119890sdot cos (120579)
1198811199101
= (1198891199101
119889119905) + 119881119890sdot sin (120579)
1198811199111
= (1198891199111
119889119905) = (
1198891205721
119889119905) sdot 119897 sdot sin (120572
1)
(1)
Taking into account Figure 1 the system of (1) for theprojections of the absolute velocity vector takes the followingform
1198811199091
= (1198891199091
119889119905) minus (
119889120593119890
119889119905) (119877 + 119910
1)
1198811199101
= (1198891199101
119889119905) + (
119889120593119890
119889119905) 1199091
1198811199111
= (1198891199111
119889119905)
(2)
The square of absolute payload119872 velocitymay be writtenas 1198812abs = 119881
2
1199091
+ 1198812
1199101
+ 1198812
1199111
1198812
abs = (1198891199091
119889119905)
2
+ (1198891199101
119889119905)
2
+ (1198891199111
119889119905)
2
4 The Scientific World Journal
+ (119889120593119890
119889119905)
2
(1199092
1+ (1199101+ 119877)2
)
+ 2(119889120593119890
119889119905)(1199091(1198891199101
119889119905) minus (119910
1+ 119877) (
1198891199091
119889119905))
= ((1198891199091
119889119905) minus (
119889120593119890
119889119905) (119877 + 119910
1))
2
+ ((1198891199101
119889119905) + (
119889120593119890
119889119905) 1199091)
2
+ (1198891199111
119889119905)
2
(3)
3 Dynamic Analysis
The slewing motion of the mechanical system ldquocrane boom1198611198742-load 119872rdquo in Figure 1 is governed by the vector equation
for the rate of change of moment of momentum H11987423
for thesystem ldquocrane boom 119861119874
2-load119872rdquo with respect to point119874
2in
the inertial reference frame 119909211991021199112
(119909211991021199112)119889H11987423
119889119905= sumM1198742 (4)
The vector equation (4) contains the following compo-nents
H11987423
= 1198681198742
33120596119890 (5)
1198681198742
33= (1198681198742
33)1198611198742
+ 119898(1199092
1+ (119877 + 119910
1)2
) (6)
sumM1198742 = M1198742119863119879
minusM1198742119865119879
= (1198721198742
119863119879minus1198721198742
119865119879) k (7)
where (119868119874233)1198611198742
is the element of mass moment of inertia forthe crane boom119861119874
2in inertial fixed on earth reference frame
119909211991021199112with respect to unit vector k and119898(119909
2
1+ (119877 + 119910
1)2) is
the element of mass moment of inertia for the payload119872 ininertial fixed on earth reference frame 119909
211991021199112with respect to
unit vector kThe external moment of gravitational forceM1198742(mg) = 0
in (4) and (7) becausemg uarrdarr kFor the system ldquocrane boom-payloadrdquo the cable reaction
force N is the internal force So in (4) and (7) we haveM1198742(N) = 0
Substitution of (5) (6) and (7) into (4) yields thefollowing scalar equation for the rate of change of momentof momentum 119867
1198742
3for the system ldquocrane boom 119861119874
2-load
119872rdquo with respect to point 1198742in the inertial reference frame
119909211991021199112
119889
119889119905(((1198681198742
33)1198611198742
+ 119898(1199092
1+ (119877 + 119910
1)2
)) (119889120593119890
119889119905))
= 1198721198742
119863119879minus1198721198742
119865119879
(8)
where driving1198721198742119863119879
and frictional1198721198742119865119879
torques are the tech-nically defined functions for specific electric drive systems
4 Nonlinear Mathematical Model withLagrange Equationsrsquo Introduction
Taking into account (3) for the square of absolute payload119872velocity 1198812abs and by adding the kinetic energy for a slewingcrane boom according to (6) we will have the followingexpression for ldquocrane boom-payloadrdquo kinetic energy
119879 =119898
2(((
1198891199091
119889119905) minus (
119889120593119890
119889119905) (119877 + 119910
1))
2
+((1198891199101
119889119905) + (
119889120593119890
119889119905) 1199091)
2
+ (1198891199111
119889119905)
2
)
+1198681198742
33
2(119889120593119890
119889119905)
2
(9)
For further analysis we will assume that the crane boomslewing angular velocity is the constant 119889120593
119890119889119905 = 120596
119890 We will
use the derived expression for kinetic energy for the left-handsides of Lagrange equations in the noninertial reference frame119909111991011199111
119889
119889119905(120597119879
1205971
) minus120597119879
1205971199091
= 1198761199091
119889
119889119905(120597119879
120597 1199101
) minus120597119879
1205971199101
= 1198761199101
119889
119889119905(120597119879
1205971
) minus120597119879
1205971199111
= 1198761199111
(10)
Taking into account the nonlinearity and nonconser-vatism of the cable reaction force N we have the followingformulae for the generalized forces in the noninertial refer-ence frame 119909
111991011199111
1198761199091
= minus 119873(1199091
119897)
1198761199101
= minus 119873(1199101
119897)
1198761199111
= + 119873(119897 minus 1199111
119897) minus 119898119892
(11)
Taking into account (9) (11) the equations (10) in thenoninertial reference frame 119909
111991011199111will finally take the
following form
119898(11988921199091
1198891199052) minus 119898(
119889120593119890
119889119905)
2
1199091minus 119898(
1198892120593119890
1198891199052) (119877 + 119910
1)
minus 2119898(119889120593119890
119889119905)(
1198891199101
119889119905) = minus119873(
1199091
119897)
119898(11988921199101
1198891199052) minus 119898(
119889120593119890
119889119905)
2
(119877 + 1199101) + 119898(
1198892120593119890
1198891199052)1199091
+ 2119898(119889120593119890
119889119905)(
1198891199091
119889119905) = minus119873(
1199101
119897)
The Scientific World Journal 5
119898(11988921199111
1198891199052) = minus119898119892 + 119873(
119897 minus 1199111
119897)
1198972= 1199092
1+ 1199102
1+ (1199111minus 119897)2
(12)
After two times differentiation of forth equations insystem (12) we will have the following formula for the cablereaction force119873 (Figure 2) from third equation of (12)
119873 = ((119898119897 [((1199091(11988921199091
1198891199052) + (
1198891199091
119889119905)
2
+ 1199101(11988921199101
1198891199052) + (
1198891199101
119889119905)
2
)
times (1198972minus 1199092
1minus 1199102
1)
+ (1199091(1198891199091
119889119905) + 1199101(1198891199101
119889119905))
2
)])
times (1198972minus 1199092
1minus 1199102
1)minus2
)
+119898119892119897
radic(1198972 minus 1199092
1minus 1199102
1)
(13)
So with an introduction of (13) to the first and secondequations of system (12) we will have the explicit nonlinearODE system for payload119872 swaying inCartesian coordinates
5 Linearized Mathematical Model
Further for the small angle 1205721 we may assume that 119911
1and
119889211991111198891199052 are the small parameters So the nonlinear equation
(13) yields
119873 asymp 119898119892 (14)
Then taking into account (14) the linearized system (12)for the two variables 119909
1and 119910
1takes the following form
11988921199091
1198891199052minus (
119889120593119890
119889119905)
2
1199091minus 2(
119889120593119890
119889119905)(
1198891199101
119889119905) = minus119892(
1199091
119897)
11988921199101
1198891199052minus (
119889120593119890
119889119905)
2
(119877 + 1199101) + 2 (
119889120593119890
119889119905)(
1198891199091
119889119905) = minus119892(
1199101
119897)
(15)
So we derive the system (15) of differential equationsfor relative motion of load 119872 on cable 119861119872 with a movablesuspension center 119861 which is fixed at the crane boom1198611198742 We assume that the crane boom 119861119874
2rotates with a
constant angular velocity 120596119890around vertical axis 119863119874
2 We
then transfer the origin of coordinate system 119874119909119910 (Figure 1)to the point 119860dyn of dynamic equilibrium for load 119872 andassume that 119909
1= 119909 119910
1= 119910 + 119910dyn (Figure 3) Then
the second equation of system (15) defines the amount ofdynamic deflection 119910dyn = 119860 st119860dyn = (120596
2
119890119877119897)(119892 minus 120596
2
119890119897)
Relative swaying paths of payload 119872 in the plane ofthe introduced relative coordinates 119909 and 119910 are shown inFigure 3 for successive increasing swaying times 119905
1= 125 s
(Figure 3(a)) 1199052= 3 s (Figure 3(b)) 119905
3= 10 s (Figure 3(c))
and 1199054= 25 s (Figure 3(d))
Then we have the normal system of two linear homo-geneous differential equations of second order for relativemotion of the load119872
(
1198632minus (1205962
119890minus (
119892
119897)) minus2120596
119890119863
2120596119890119863 119863
2minus (1205962
119890minus (
119892
119897))
)
times (119909 (119905)
119910 (119905)) = 0 119863 =
119889
119889119905
(16)
The determinant of natural frequencies matrix for thesystem (16) has the following form
1003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
1205822+ (
119892
119897) minus 1205962
119890minus2 sdot 120596
119890sdot 120582
2 sdot 120596119890sdot 120582 120582
2+ (
119892
119897) minus 1205962
119890
1003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
= 0 (17)
Using (17) we adjust the roots 1205821and 120582
2of secular
equation
1205821= plusmn]1sdot 119894 120582
2= plusmn]2sdot 119894 ]
1= 119896 + 120596
119890
]2= 119896 minus 120596
119890 119896 = radic
119892
119897 120596119890
= 119896
(18)
The initial conditions for the problem are as follows
119909 (0) = 0 119863119909 (0) = +119881119861= +120596119890119877
119910 (0) = minus119910dyn 119863119910 (0) = 0
(19)
Taking into account (18) and (19) the law of relativemotion for payload takes the following form
119909 (119905) = 1198601
119894
2(119890minus]1119894119905minus 119890
]1119894119905) + 119860
2
119894
2(119890minus]2119894119905minus 119890
]2119894119905)
119910 (119905) = 1198601
1
2(119890minus]1119894119905+ 119890
]1119894119905) minus 119860
2
1
2(119890minus]2119894119905+ 119890
]2119894119905)
(20)
After substitution of values of1198601and119860
2in (20) we have
the following law of payload119872 relative swaying motion withthe uniformly rotating pivot center
119909 (119905) = (
119881119861minus 119910dyn (119896 minus 120596
119890)
2119896)
119894
2(119890minus]1119894119905minus 119890
]1119894119905)
+ (
119881119861+ 119910dyn (119896 + 120596
119890)
2119896)
119894
2(119890minus]2119894119905minus 119890
]2119894119905)
119910 (119905) = (
119881119861minus 119910dyn (119896 minus 120596
119890)
2119896)1
2(119890minus]1119894119905+ 119890
]1119894119905)
minus (
119881119861+ 119910dyn (119896 + 120596
119890)
2119896)1
2(119890minus]2119894119905+ 119890
]2119894119905)
(21)
6 The Scientific World Journal
102
101
1
099
0 2 4 6 8 10
Dim
ensio
nles
s cab
le re
actio
n (N
mg)
t (s)l asymp 0206 (m) 120596e asymp 0449 (rads) k asymp 69 (rads)
(a)
0 2 4 6 8 10
Dim
ensio
nles
s cab
le re
actio
n (N
mg)
t (s)l asymp 0412 (m) 120596e asymp 0449 (rads) k asymp 488 (rads)
1012
1010
1008
1006
1004
1002
1
0998
0996
0994
(b)
0 2 4 6 8 10
Dim
ensio
nles
s cab
le re
actio
n (N
mg)
t (s)
1004
1002
1003
1001
1
0999
l asymp 0618 (m) 120596e asymp 0314 (rads) k asymp 3984 (rads)
(c)
0 2 4 6 8 10
Dim
ensio
nles
s cab
le re
actio
n (N
mg)
t (s)
10012
10010
10008
10006
10004
10002
1
09996
09994
09998
l asymp 0825 (m) 120596e asymp 0209 (rads) k asymp 3448 (rads)
(d)
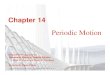
Figure 2 Time dependencies of dimensionless cable reactions 119873119898119892 in the first approximation for fixed cable lengths 119897 = 0206m (a)119897 = 0412m (b) 119897 = 0618m (c) and 119897 = 0825m (d)
The relative trajectories for load119872on the cable in Figure 3have been derived for the following numerical values 119877 =
0492m 119892 = 981ms2 119897 = 0825m 119896 = (119892119897)05
asymp
3448 rads 119879 = 30 s 120596119890= 2120587119879 asymp 0209 rads 120572
1dyn =
000221 rad 119881119861
= 0103ms 119910dyn = 000182m ]1
=
119896 + 120596119890
= 3658 rads ]2
= 119896 minus 120596119890
= 3239 rads(Figure 3)
Numerical plots in Figure 3 show the payload119872 swayingin the noninertial reference frame (119874119909119910119911) In order tovisualize payload119872 absolute swaying path (Figures 4 and 5)
The Scientific World Journal 7
t1 = 125 s
y(x) l = 0825 (m) k asymp 3448 (rads) 120596e asymp 0209 (rads)
Relative trajectory of load M swayingfor linearized model
(a)
t2 = 3s
y(x) l = 0825 (m) k asymp 3448 (rads) 120596e asymp 0209 (rads)
Relative trajectory of load M swayingfor linearized model
(b)
t3 = 10 s
y(x) l = 0825 (m) k asymp 3448 (rads) 120596e asymp 0209 (rads)
Relative trajectory of load M swayingfor linearized model
(c)
y(x) l = 0825 (m) k asymp 3448 (rads) 120596e asymp 0209 (rads)
t4 = 25s
Relative trajectory of load M swayingfor linearized model
(d)
Figure 3The relative trajectories for load119872 on the cable during uniform rotational motion of the crane boom 1198611198742for the moments of time
1199051= 125 s (a) 119905
2= 3 s (b) 119905
3= 10 s (c) and 119905
4= 25 s (d)
in the fixed inertial reference frame (1198742119909211991021199112) we will
address the following transition formula
(1199092(119905)
1199102(119905)
) = (sin (120596
119890119905) cos (120596
119890119905)
minus cos (120596119890119905) sin (120596
119890119905)) (
119909 (119905)
119910 (119905) + 119877 + 119910dyn)
(22)
Derived computational plot for absolute payload swayingpath in the absolute coordinatesrsquo plane (119909
21199102) is shown in
Figure 5(a) for load119872 swaying time 1199051= 15 s and crane boom
transport slewing angle120593119890= 180
∘ In Figure 5(b) we show theexperimental plot for absolute payload swaying path in theabsolute coordinatesrsquo plane (119909
21199102) for load 119872 swaying time
1199052= 15 s and crane boom transport slewing angle 120593
119890= 180
∘which was built with an introduction of experimental setupin Figure 4
6 Comparison of Derived andKnown Published Results
The computational dimensionless cable force119873119898119892 derivedin the first approximation and shown in Figure 2 outlinesthe minor change of the cable tension force in the vicinityof the ordinate (119873119898119892) = 1 (119873119898119892) isin [09875 10233]
for 119897 = 0206m in Figure 2(a) (119873119898119892) isin [0994 10122]
for 119897 = 0412m in Figure 2(b) (119873119898119892) isin [0998 1004] for119897 = 0618m in Figure 2(c) and (119873119898119892) isin [099933 10013]
for 119897 = 0825m in Figure 2(d) So the assumption (14)really takes place as shown in Figure 2 The same effect for(119873119898119892)Mitrev isin [094 104] has been derived by Mitrev andGrigorov [23 Mitrevrsquos Figure 7 in page 89] that confirmsassumption (14) An analogous effect for dimensionless cable
8 The Scientific World Journal
Camera
Bearing
Boom
Laser pointer
Slewing axis
CableLower plate
M
Light-emitting diodeRegular grid 1200mm times 700mmwith square cells 200mm times 20mm
B
D
O2
Figure 4 The experimental measurement system for payload 119872
swaying during crane boom slewing
force (119873119898119892)Maczynski isin [0996 1005] has been derived byMaczynski and Wojciech [24 Maczynskirsquos Figure 10 in page278] which also reaffirms the assumption (14)
In published work by Sakawa et al ([25] Figure 3 at page552 Figure 4 at page 552 Figure 5 at page 554 and Figure 6at page 554) the small Sakawa values 119889119911119889119905 le 01 (Figures 3and 4) and 119889119911119889119905 le 005 (Figures 5 and 6) of 119911-projectionsfor payload velocities have been shown which confirms thesmall angle assumption119873 asymp 119898119892 (14)
7 Discussion and Analysis of Basic Results forMathematical and Physical Simulation
The relative trajectories for load119872 swaying in Figure 3 showequality of maximum values for relative 119909 and 119910 payloadcoordinates
119909max = 119910max = 1198601+ 1198602=
120596119890(119877 + 119910dyn)
119896 (23)
The formula (23) outlines that values 119909max and 119910max inFigure 3 increase with growth of boom slewing velocity 120596
119890
and with increased cable length 119897 The 119910dyn influence on thevalues of 119909max and 119910max is negligible
Equation (18) shows that the free oscillation frequencies]1and ]
2depend on the boom slewing velocity 120596
119890and
natural frequency 119896 of the payload with a fixed pivot point119861 The frequencies ]
1and ]
2essentially depend on the
pendulum length 119897 because 119896 ≫ 120596119890 Kinematically saying
the miscoordination of frequencies ]1and ]
2is ]1minus ]2=
2120596119890and is determined by the crane boom slewing velocity
120596119890 Dynamically saying the value of miscoordination is
governed by the Coriolis acceleration-induced DrsquoAlembertrsquosinertia force
Computations shown in Figure 3 for relative payload119872 swaying show that the clockwise direction of rotationfor relative oscillations is opposite in direction from thecounterclockwise direction of rotation for the crane boomThis effect follows from the conservation of position of theplane 119910
21199112of oscillations of load 119872 in the fixed inertial
coordinate system 119909211991021199112
The comparative analysis of computational (1) and exper-imental (2) absolute payload trajectories is shown in Fig-ure 5(c)The quantity of the local maximums in Figure 5(a) is8 for theoretical curve 1 So the theoretical period for relativeload swaying is 119879theor = 187 s The quantity of the localmaximums in Figure 5(b) is 75 for experimental curve 2Theperiod for experimental curve 2 in Figure 5(b) is 119879experim =
2 s The discrepancy between the values of theoretical andexperimental periods does not exceed 7
The experimental absolute trajectory (2) in Figures 5(b)and 5(c) outlines the additional relative swaying of payload119872 after crane boom stop which has the elliptical form inthe vicinity of the point (0 minus05) in the plane 119909
21199102for 120593119890=
180∘ The remaining payload motions after crane boom stop
are the small oscillations of the payload with the fixed pivotcenter
8 Final Conclusions
The closed system of nonlinear ODEs for payload relativeswaying has been derived in relative Cartesian coordinateswith an introduction of Lagrange equations and a geometricconstraint equation
The explicit form of the dependence of the cable reactionforce as a function of the relative payload coordinates 119909
1 1199101
1199111and their first and second time derivatives has been found
Derived complex dependency of the cable reaction force onthe abovementioned variables determines the nonlinearity ofthe present problem
The deviation of cable reaction force frompayload gravityforce is small This fact allowed the derivation of a linearizedODE system for payload swaying in relative Cartesian coor-dinates and verified the small relative Cartesian coordinatesrsquoassumption The analytical expressions for relative payloadpath have been derived
Derived results have good agreement with experimentsand known published data
The Scientific World Journal 9
05
04
03
02
01
0
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
t = 15 s
1
Point O2
2R = 1 (m)
1
PointnP i OO2OO
y2 (m)
x2 (m)(Point D)
(Point M)
(a)
05
04
03
02
01
02R = 1 (m)
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
2
4
3
Rotational directionPoint O2
t = 18 s
(Point D)
(Point M)
(Point B)
x2 (m)
y2 (m)
(b)
1 2
4
Point O2
2R = 1 (m)
y2(m)
x2(m)
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
(Point D)
(Point M) (Point M)
05
04
03
02
01
0
(c)
Figure 5 Calculated 1 (a c) and experimental 2 (b c) absolute trajectories for load119872 where 3 is the trajectory of boom point 119861 (b) 4 is thecenter 119874
2(D) of boom rotation (b c)
Disclosure
The submission of the authorsrsquo paper implies that it has notbeen previously published that it is not under considerationfor publication elsewhere and that it will not be publishedelsewhere in the same form without the written permissionof the editors
Conflict of Interests
The authors Alexander V Perig Alexander N Stadnik andAlexander I Deriglazov declare that there is no conflict ofinterests regarding the publication of this paper
References
[1] EMAbdel-Rahman andAHNayfeh ldquoPendulation reductionin boom cranes using cable length manipulationrdquo NonlinearDynamics vol 27 no 3 pp 255ndash269 2002
[2] W Adamiec-Wojcik I P Fałat A Maczynski and S WojciechldquoLoad stabilisation in an A-framemdasha type of an offshore cranerdquoThe Archive of Mechanical Engineering vol 56 no 1 pp 37ndash592009
[3] P J Aston ldquoBifurcations of the horizontally forced sphericalpendulumrdquoMethods in AppliedMechanics and Engineering vol170 no 3-4 pp 343ndash3353 1999
[4] P Betsch M Quasem and S Uhlar ldquoNumerical integration ofdiscretemechanical systems withmixed holonomic and controlconstraintsrdquo Journal of Mechanical Science and Technology vol23 no 4 pp 1012ndash1018 2009
[5] W Blajer and K Kołodziejczyk ldquoA geometric approach tosolving problems of control constraints theory and a DAEframeworkrdquoMultibody System Dynamics vol 11 no 4 pp 343ndash364 2004
[6] W Blajer and K Kołodziejczyk ldquoControl of underactuatedmechanical systems with servo-constraintsrdquoNonlinear Dynam-ics vol 50 no 4 pp 781ndash791 2007
[7] W Blajer and K Kołodziejczyk ldquoModeling of underactuatedmechanical systems in partly specified motionrdquo Journal ofTheoretical and Applied Mechanics vol 46 no 2 pp 383ndash3942008
[8] W Blajer and K Kołodziejczyk ldquoThe use of dependent coor-dinates in modeling and simulation of cranes executing aload prescribed motionrdquo The Archive of Mechanical Engineer-ing vol 3 pp 209ndash222 2009 httpamemeilpweduplindexphpengcontentdownload3731748fileart 2009 3 02pdf
[9] W Blajer A Czaplicki K Dziewiecki and Z Mazur ldquoInfluenceof selected modeling and computational issues on muscle forceestimatesrdquoMultibody System Dynamics vol 24 no 4 pp 473ndash492 2010
[10] W Blajer and K Kołodziejczyk ldquoImproved DAE formulationfor inverse dynamics simulation of cranesrdquo Multibody SystemDynamics vol 25 no 2 pp 131ndash143 2011
10 The Scientific World Journal
[11] J H Cha S H Ham K Y Lee and M I Roh ldquoApplicationof a topological modelling approach of multi-body systemdynamics to simulation of multi-floating cranes in shipyardsrdquoProceedings of the Institution ofMechanical Engineers K vol 224no 4 pp 365ndash373 2010
[12] K Ellermann E Kreuzer and M Markiewicz ldquoNonlineardynamics of floating cranesrdquo Nonlinear Dynamics vol 27 no2 pp 107ndash183 2002
[13] T Erneux and T Kalmar-Nagy ldquoNonlinear stability of a delayedfeedback controlled container cranerdquo Journal of Vibration andControl vol 13 no 5 pp 603ndash616 2007
[14] G Glossiotis and I Antoniadis ldquoPayload sway suppression inrotary cranes by digital filtering of the commanded inputsrdquoProceedings of the Institution of Mechanical Engineers K vol 217no 2 pp 99ndash109 2003
[15] R A Ibrahim ldquoExcitation-induced stability and phase transi-tion a reviewrdquo Journal of Vibration and Control vol 12 no 10pp 1093ndash1170 2006
[16] J Kortelainen and A Mikkola ldquoSemantic data model inmultibody system simulationrdquo Proceedings of the Institution ofMechanical Engineers K vol 224 no 4 pp 341ndash352 2010
[17] R Mitrev ldquoMathematical modelling of translational motion ofrail-guided cart with suspended payloadrdquo Journal of ZhejiangUniversity Science A vol 8 no 9 pp 1395ndash1400 2007
[18] B Grigorov and R Mitrev ldquoA NewtonmdashEuler approach to thefreely suspended load swinging problemrdquo Recent Journal vol10 no 26 pp 109ndash112 2009
[19] MOsinski and SWojciech ldquoApplication of nonlinear optimisa-tion methods to input shaping of the hoist drive of an off-shorecranerdquo Nonlinear Dynamics vol 17 no 4 pp 369ndash386 1998
[20] H L Ren X LWang Y J Hu and C G Li ldquoDynamic responseanalysis of a moored crane-ship with a flexible boomrdquo Journalof Zhejiang University Science A vol 9 no 1 pp 26ndash31 2008
[21] H Schaub ldquoRate-based ship-mounted crane payload pendula-tion control systemrdquo Control Engineering Practice vol 16 no 1pp 132ndash145 2008
[22] N Uchiyama ldquoRobust control for overhead cranes by partialstate feedbackrdquo Proceedings of the Institution of MechanicalEngineers I vol 223 no 4 pp 575ndash580 2009
[23] R Mitrev and B Grigorov ldquoDynamic behaviour of a spheri-cal pendulum with spatially moving pivotrdquo Zeszyty NaukowePolitechniki Poznanskiej Budowa Maszyn i Zarządzanie Pro-dukcją vol 9 pp 81ndash91 2008
[24] A Maczynski and S Wojciech ldquoDynamics of a mobile craneand optimisation of the slewing motion of its upper structurerdquoNonlinear Dynamics vol 32 no 3 pp 259ndash290 2003
[25] Y Sakawa Y Shindo and Y Hashimoto ldquoOptimal control of arotary cranerdquo Journal of Optimization Theory and Applicationsvol 35 no 4 pp 535ndash557 1981
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

2 The Scientific World Journal
specified motion It is necessary to note that this paper dealsprimarily with controlled in-plane motions of the crane sys-tem with linear transport motion Blajer and Kołodziejczyk[6] have investigated the control of underactuated cranemechanical systems with servo constraints This work takesinto account the restoring load gravity force in the horizontalplane However the derived mathematical model assumesprimarily linear transportmotionwithout theCoriolis inertiaforce Blajer and Kołodziejczyk [7] have presented a concep-tual research article focused on the building of n-index DAEsystems for a relevant dynamic description of partly specifiedcrane system motion Blajer and Kołodziejczyk [8] haveintroduced a carefully argued computational technique fornumerical simulation of cranes based on the use of dependentcoordinates The advantages of dependent coordinatesrsquo usagehave been outlined It is necessary to note that with each newresearch effort the authors apply much more sophisticatedcomputational methods and derive more exact governingdynamic equations However this paper is also based onthe same simple pendulum model as the first approacheswherein the Coriolis inertia force and the restoring loadgravity force are ignored Blajer et al [9] have simulated atwo-tier framed human arm model with segments of equallength The application of this model seems to be veryuseful for the dynamic analysis of a swaying load in thehorizontal plane during rotation of a crane boom Blajer andKołodziejczyk [10] have developed improved DAE equationsfor more precise rotary crane dynamics simulation Butadditional dimensional analysis for the explicit forms of thegoverning equations would greatly enhance the work
Cha et al [11] have applied a topological modelingapproach to a dynamic simulation of multiple floating cranesin shipyards taking into account crane boom oscillations
Ellermann et al [12] have introduced the vector ofgeneralized gyroscopic andCoriolis forces for amathematicaldescription of nonlinear dynamics of floating cranes Thiswork used a comprehensivemodel with a set of 20 differentialequations but does not allow proper analysis of particularcases of floating jib crane-load system motions
Erneux and Kalmar-Nagy [13] have proposed a planependulum container crane model with linear transport trol-ley motion This model illustrates linear displacement of theplane pendulum suspension center
Glossiotis and Antoniadis [14] have derived a four-degrees-of-freedom (4DOF) model for the rotary cranesystem incorporating both hoisting and slewing payloadmotions and thus is able to handle cases where hoisting canbe simultaneously applied to the rotary motion
Ibrahim [15] has studied the issues of multiplicative noiseand noise-enhanced stability of spherical pendulums
Kortelainen andMikkola [16] have introduced data man-agement techniqueswithin an approachusing a semantic datamodel for payload oscillation problems
Mitrev [17] has applied his generalized approach with theintroduction of an inertia force vector to the case of lineartransport motion of the pendulum pivot center Grigorovand Mitrev [18] have investigated a spherical pendulumdynamic model for a numerical solution of a freely sus-pended swinging load problem They have derived absolute
trajectories of both the pendulum suspension center and theswinging load
Osinski andWojciech [19] have analyzed the hoistmotionof a mechanical system consisting of a load hoist rope andelastic crane jib This study mainly deals with rectilinear loadoscillations and lateral crane jib vibrations
Ren et al [20] have used a mixed approach combin-ing both analytical and finite-element techniques for theLagrangian function of a mechanical system They havedetermined the relations between load swaying crane boomflexibility and wave motions Schaub [21] has implemented arate-based ship-mounted crane payload pendulation controlsystem This research is focused on a kinematic approach topayload stabilizationwith an emphasis on the usage of inertialmeasurement unit (IMU) information
Uchiyama [22] has applied control theory techniques for arobust crane controller design that provides robustness withrespect to changes in cable length and transported payloadmass without iterative computations
At the same time these known articles [1ndash22] do not dojustice to load swaying descriptions using Coriolis effects inrelative motion The present paper focuses on these issues
The present paper focuses on the Lagrange mechanics-based description of small oscillations for a spherical pendu-lum with a uniformly rotating suspension center
The prime novelty statement of the present paper isbased on the rational introduction of a Cartesian coordinatesystem for study of small relative swaying of a payload andsubstantiation of uniformity of crane boom rotation
2 Kinematic Analysis
In order to solve the problem we introduce the Lagrangeequations for the motion of the mechanical system ldquocraneboom 119861119874
2-load119872rdquo which is shown in Figure 1
The computational scheme in Figure 1 may be describedwith an introduction of three degrees of freedom For gen-eralized coordinates we assume the rectangular coordinates119909 119910 and 119911 of the load and the angle 120593
119890= 120596119890119905 of crane
boom 1198611198742uniform rotation in the horizontal plane (119909119910)
with the constant angular velocity 120596119890around the vertical
axis 11987421199112 We denote the fixed inertial coordinate system
as 119909211991021199112and the moving noninertial frame of reference as
119909111991011199111 which is rigidly bounded with the crane boom 119861119874
2
Rotation of themoving noninertial frame of reference 119909111991011199111
around the fixed inertial coordinate system 119909211991021199112defines
the transportation motion The motion of load119872 relative tothe moving noninertial frame of reference 119909
111991011199111defines the
relative motionThe scalar of the load119872 transportation velocity is defined
as 119881119890
= 120596119890sdot 1198742119872 and transportation velocity vector V
119890
is perpendicular to O2M that is the scalar product(V119890O2M) = 0 (Figure 1) The relative velocity vector V
119903of
the load 119872 is defined as V119903= (119889119909
1119889119905 119889119910
1119889119905 119889119911
1119889119905) in
Figure 1 In the initial time 119905 = 0 load119872 has the vertical 119861119860stin-line position that is the load119872 initial position coincideswith the static equilibrium position119860 st for the load119872 on thecable119872119861
The Scientific World Journal 3
z2
z1
y2
y1
O2
O1
x2
x1
120593e
1205722
1205721
Adyn
Ast
= d120593edt
H
D
l
R
B
Δ
x
y
M
O
z
120579
rarrVr
rarrVe
rarr120596e120596e
rarrN
mrarrg
Figure 1 Computational spatial scheme of spherical pendulum119872 swaying on the cable119872119861 during crane boom 1198611198742slewing motion for the
linearized model derivation in Cartesian coordinates
At time 119905 = 0 the load 119872 has zero absolute velocity andthe initial relative velocity is 119881
119903119909(0) = +120596
119890sdot 119861119863 (Figure 1)
In Figure 1 we denote the angle 120579 which is the currentangle 119860 st1198742119872 that is the angle between the axis 119910
1and
the radius-vector O2M where sin(120579) = 11990911198742119872 cos(120579) =
(119877+1199101)1198742119872The vertical coordinate 119911
1in Figure 1 is defined
as 1199111= 119897 minus 119897 sdot cos(120572
1) where 120572
1is the angle between the cable
119872119861 and the verticalFor small angles 120572
1 the projections of the absolute
velocity vector may be written as
1198811199091
= (1198891199091
119889119905) minus 119881119890sdot cos (120579)
1198811199101
= (1198891199101
119889119905) + 119881119890sdot sin (120579)
1198811199111
= (1198891199111
119889119905) = (
1198891205721
119889119905) sdot 119897 sdot sin (120572
1)
(1)
Taking into account Figure 1 the system of (1) for theprojections of the absolute velocity vector takes the followingform
1198811199091
= (1198891199091
119889119905) minus (
119889120593119890
119889119905) (119877 + 119910
1)
1198811199101
= (1198891199101
119889119905) + (
119889120593119890
119889119905) 1199091
1198811199111
= (1198891199111
119889119905)
(2)
The square of absolute payload119872 velocitymay be writtenas 1198812abs = 119881
2
1199091
+ 1198812
1199101
+ 1198812
1199111
1198812
abs = (1198891199091
119889119905)
2
+ (1198891199101
119889119905)
2
+ (1198891199111
119889119905)
2
4 The Scientific World Journal
+ (119889120593119890
119889119905)
2
(1199092
1+ (1199101+ 119877)2
)
+ 2(119889120593119890
119889119905)(1199091(1198891199101
119889119905) minus (119910
1+ 119877) (
1198891199091
119889119905))
= ((1198891199091
119889119905) minus (
119889120593119890
119889119905) (119877 + 119910
1))
2
+ ((1198891199101
119889119905) + (
119889120593119890
119889119905) 1199091)
2
+ (1198891199111
119889119905)
2
(3)
3 Dynamic Analysis
The slewing motion of the mechanical system ldquocrane boom1198611198742-load 119872rdquo in Figure 1 is governed by the vector equation
for the rate of change of moment of momentum H11987423
for thesystem ldquocrane boom 119861119874
2-load119872rdquo with respect to point119874
2in
the inertial reference frame 119909211991021199112
(119909211991021199112)119889H11987423
119889119905= sumM1198742 (4)
The vector equation (4) contains the following compo-nents
H11987423
= 1198681198742
33120596119890 (5)
1198681198742
33= (1198681198742
33)1198611198742
+ 119898(1199092
1+ (119877 + 119910
1)2
) (6)
sumM1198742 = M1198742119863119879
minusM1198742119865119879
= (1198721198742
119863119879minus1198721198742
119865119879) k (7)
where (119868119874233)1198611198742
is the element of mass moment of inertia forthe crane boom119861119874
2in inertial fixed on earth reference frame
119909211991021199112with respect to unit vector k and119898(119909
2
1+ (119877 + 119910
1)2) is
the element of mass moment of inertia for the payload119872 ininertial fixed on earth reference frame 119909
211991021199112with respect to
unit vector kThe external moment of gravitational forceM1198742(mg) = 0
in (4) and (7) becausemg uarrdarr kFor the system ldquocrane boom-payloadrdquo the cable reaction
force N is the internal force So in (4) and (7) we haveM1198742(N) = 0
Substitution of (5) (6) and (7) into (4) yields thefollowing scalar equation for the rate of change of momentof momentum 119867
1198742
3for the system ldquocrane boom 119861119874
2-load
119872rdquo with respect to point 1198742in the inertial reference frame
119909211991021199112
119889
119889119905(((1198681198742
33)1198611198742
+ 119898(1199092
1+ (119877 + 119910
1)2
)) (119889120593119890
119889119905))
= 1198721198742
119863119879minus1198721198742
119865119879
(8)
where driving1198721198742119863119879
and frictional1198721198742119865119879
torques are the tech-nically defined functions for specific electric drive systems
4 Nonlinear Mathematical Model withLagrange Equationsrsquo Introduction
Taking into account (3) for the square of absolute payload119872velocity 1198812abs and by adding the kinetic energy for a slewingcrane boom according to (6) we will have the followingexpression for ldquocrane boom-payloadrdquo kinetic energy
119879 =119898
2(((
1198891199091
119889119905) minus (
119889120593119890
119889119905) (119877 + 119910
1))
2
+((1198891199101
119889119905) + (
119889120593119890
119889119905) 1199091)
2
+ (1198891199111
119889119905)
2
)
+1198681198742
33
2(119889120593119890
119889119905)
2
(9)
For further analysis we will assume that the crane boomslewing angular velocity is the constant 119889120593
119890119889119905 = 120596
119890 We will
use the derived expression for kinetic energy for the left-handsides of Lagrange equations in the noninertial reference frame119909111991011199111
119889
119889119905(120597119879
1205971
) minus120597119879
1205971199091
= 1198761199091
119889
119889119905(120597119879
120597 1199101
) minus120597119879
1205971199101
= 1198761199101
119889
119889119905(120597119879
1205971
) minus120597119879
1205971199111
= 1198761199111
(10)
Taking into account the nonlinearity and nonconser-vatism of the cable reaction force N we have the followingformulae for the generalized forces in the noninertial refer-ence frame 119909
111991011199111
1198761199091
= minus 119873(1199091
119897)
1198761199101
= minus 119873(1199101
119897)
1198761199111
= + 119873(119897 minus 1199111
119897) minus 119898119892
(11)
Taking into account (9) (11) the equations (10) in thenoninertial reference frame 119909
111991011199111will finally take the
following form
119898(11988921199091
1198891199052) minus 119898(
119889120593119890
119889119905)
2
1199091minus 119898(
1198892120593119890
1198891199052) (119877 + 119910
1)
minus 2119898(119889120593119890
119889119905)(
1198891199101
119889119905) = minus119873(
1199091
119897)
119898(11988921199101
1198891199052) minus 119898(
119889120593119890
119889119905)
2
(119877 + 1199101) + 119898(
1198892120593119890
1198891199052)1199091
+ 2119898(119889120593119890
119889119905)(
1198891199091
119889119905) = minus119873(
1199101
119897)
The Scientific World Journal 5
119898(11988921199111
1198891199052) = minus119898119892 + 119873(
119897 minus 1199111
119897)
1198972= 1199092
1+ 1199102
1+ (1199111minus 119897)2
(12)
After two times differentiation of forth equations insystem (12) we will have the following formula for the cablereaction force119873 (Figure 2) from third equation of (12)
119873 = ((119898119897 [((1199091(11988921199091
1198891199052) + (
1198891199091
119889119905)
2
+ 1199101(11988921199101
1198891199052) + (
1198891199101
119889119905)
2
)
times (1198972minus 1199092
1minus 1199102
1)
+ (1199091(1198891199091
119889119905) + 1199101(1198891199101
119889119905))
2
)])
times (1198972minus 1199092
1minus 1199102
1)minus2
)
+119898119892119897
radic(1198972 minus 1199092
1minus 1199102
1)
(13)
So with an introduction of (13) to the first and secondequations of system (12) we will have the explicit nonlinearODE system for payload119872 swaying inCartesian coordinates
5 Linearized Mathematical Model
Further for the small angle 1205721 we may assume that 119911
1and
119889211991111198891199052 are the small parameters So the nonlinear equation
(13) yields
119873 asymp 119898119892 (14)
Then taking into account (14) the linearized system (12)for the two variables 119909
1and 119910
1takes the following form
11988921199091
1198891199052minus (
119889120593119890
119889119905)
2
1199091minus 2(
119889120593119890
119889119905)(
1198891199101
119889119905) = minus119892(
1199091
119897)
11988921199101
1198891199052minus (
119889120593119890
119889119905)
2
(119877 + 1199101) + 2 (
119889120593119890
119889119905)(
1198891199091
119889119905) = minus119892(
1199101
119897)
(15)
So we derive the system (15) of differential equationsfor relative motion of load 119872 on cable 119861119872 with a movablesuspension center 119861 which is fixed at the crane boom1198611198742 We assume that the crane boom 119861119874
2rotates with a
constant angular velocity 120596119890around vertical axis 119863119874
2 We
then transfer the origin of coordinate system 119874119909119910 (Figure 1)to the point 119860dyn of dynamic equilibrium for load 119872 andassume that 119909
1= 119909 119910
1= 119910 + 119910dyn (Figure 3) Then
the second equation of system (15) defines the amount ofdynamic deflection 119910dyn = 119860 st119860dyn = (120596
2
119890119877119897)(119892 minus 120596
2
119890119897)
Relative swaying paths of payload 119872 in the plane ofthe introduced relative coordinates 119909 and 119910 are shown inFigure 3 for successive increasing swaying times 119905
1= 125 s
(Figure 3(a)) 1199052= 3 s (Figure 3(b)) 119905
3= 10 s (Figure 3(c))
and 1199054= 25 s (Figure 3(d))
Then we have the normal system of two linear homo-geneous differential equations of second order for relativemotion of the load119872
(
1198632minus (1205962
119890minus (
119892
119897)) minus2120596
119890119863
2120596119890119863 119863
2minus (1205962
119890minus (
119892
119897))
)
times (119909 (119905)
119910 (119905)) = 0 119863 =
119889
119889119905
(16)
The determinant of natural frequencies matrix for thesystem (16) has the following form
1003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
1205822+ (
119892
119897) minus 1205962
119890minus2 sdot 120596
119890sdot 120582
2 sdot 120596119890sdot 120582 120582
2+ (
119892
119897) minus 1205962
119890
1003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
= 0 (17)
Using (17) we adjust the roots 1205821and 120582
2of secular
equation
1205821= plusmn]1sdot 119894 120582
2= plusmn]2sdot 119894 ]
1= 119896 + 120596
119890
]2= 119896 minus 120596
119890 119896 = radic
119892
119897 120596119890
= 119896
(18)
The initial conditions for the problem are as follows
119909 (0) = 0 119863119909 (0) = +119881119861= +120596119890119877
119910 (0) = minus119910dyn 119863119910 (0) = 0
(19)
Taking into account (18) and (19) the law of relativemotion for payload takes the following form
119909 (119905) = 1198601
119894
2(119890minus]1119894119905minus 119890
]1119894119905) + 119860
2
119894
2(119890minus]2119894119905minus 119890
]2119894119905)
119910 (119905) = 1198601
1
2(119890minus]1119894119905+ 119890
]1119894119905) minus 119860
2
1
2(119890minus]2119894119905+ 119890
]2119894119905)
(20)
After substitution of values of1198601and119860
2in (20) we have
the following law of payload119872 relative swaying motion withthe uniformly rotating pivot center
119909 (119905) = (
119881119861minus 119910dyn (119896 minus 120596
119890)
2119896)
119894
2(119890minus]1119894119905minus 119890
]1119894119905)
+ (
119881119861+ 119910dyn (119896 + 120596
119890)
2119896)
119894
2(119890minus]2119894119905minus 119890
]2119894119905)
119910 (119905) = (
119881119861minus 119910dyn (119896 minus 120596
119890)
2119896)1
2(119890minus]1119894119905+ 119890
]1119894119905)
minus (
119881119861+ 119910dyn (119896 + 120596
119890)
2119896)1
2(119890minus]2119894119905+ 119890
]2119894119905)
(21)
6 The Scientific World Journal
102
101
1
099
0 2 4 6 8 10
Dim
ensio
nles
s cab
le re
actio
n (N
mg)
t (s)l asymp 0206 (m) 120596e asymp 0449 (rads) k asymp 69 (rads)
(a)
0 2 4 6 8 10
Dim
ensio
nles
s cab
le re
actio
n (N
mg)
t (s)l asymp 0412 (m) 120596e asymp 0449 (rads) k asymp 488 (rads)
1012
1010
1008
1006
1004
1002
1
0998
0996
0994
(b)
0 2 4 6 8 10
Dim
ensio
nles
s cab
le re
actio
n (N
mg)
t (s)
1004
1002
1003
1001
1
0999
l asymp 0618 (m) 120596e asymp 0314 (rads) k asymp 3984 (rads)
(c)
0 2 4 6 8 10
Dim
ensio
nles
s cab
le re
actio
n (N
mg)
t (s)
10012
10010
10008
10006
10004
10002
1
09996
09994
09998
l asymp 0825 (m) 120596e asymp 0209 (rads) k asymp 3448 (rads)
(d)
Figure 2 Time dependencies of dimensionless cable reactions 119873119898119892 in the first approximation for fixed cable lengths 119897 = 0206m (a)119897 = 0412m (b) 119897 = 0618m (c) and 119897 = 0825m (d)
The relative trajectories for load119872on the cable in Figure 3have been derived for the following numerical values 119877 =
0492m 119892 = 981ms2 119897 = 0825m 119896 = (119892119897)05
asymp
3448 rads 119879 = 30 s 120596119890= 2120587119879 asymp 0209 rads 120572
1dyn =
000221 rad 119881119861
= 0103ms 119910dyn = 000182m ]1
=
119896 + 120596119890
= 3658 rads ]2
= 119896 minus 120596119890
= 3239 rads(Figure 3)
Numerical plots in Figure 3 show the payload119872 swayingin the noninertial reference frame (119874119909119910119911) In order tovisualize payload119872 absolute swaying path (Figures 4 and 5)
The Scientific World Journal 7
t1 = 125 s
y(x) l = 0825 (m) k asymp 3448 (rads) 120596e asymp 0209 (rads)
Relative trajectory of load M swayingfor linearized model
(a)
t2 = 3s
y(x) l = 0825 (m) k asymp 3448 (rads) 120596e asymp 0209 (rads)
Relative trajectory of load M swayingfor linearized model
(b)
t3 = 10 s
y(x) l = 0825 (m) k asymp 3448 (rads) 120596e asymp 0209 (rads)
Relative trajectory of load M swayingfor linearized model
(c)
y(x) l = 0825 (m) k asymp 3448 (rads) 120596e asymp 0209 (rads)
t4 = 25s
Relative trajectory of load M swayingfor linearized model
(d)
Figure 3The relative trajectories for load119872 on the cable during uniform rotational motion of the crane boom 1198611198742for the moments of time
1199051= 125 s (a) 119905
2= 3 s (b) 119905
3= 10 s (c) and 119905
4= 25 s (d)
in the fixed inertial reference frame (1198742119909211991021199112) we will
address the following transition formula
(1199092(119905)
1199102(119905)
) = (sin (120596
119890119905) cos (120596
119890119905)
minus cos (120596119890119905) sin (120596
119890119905)) (
119909 (119905)
119910 (119905) + 119877 + 119910dyn)
(22)
Derived computational plot for absolute payload swayingpath in the absolute coordinatesrsquo plane (119909
21199102) is shown in
Figure 5(a) for load119872 swaying time 1199051= 15 s and crane boom
transport slewing angle120593119890= 180
∘ In Figure 5(b) we show theexperimental plot for absolute payload swaying path in theabsolute coordinatesrsquo plane (119909
21199102) for load 119872 swaying time
1199052= 15 s and crane boom transport slewing angle 120593
119890= 180
∘which was built with an introduction of experimental setupin Figure 4
6 Comparison of Derived andKnown Published Results
The computational dimensionless cable force119873119898119892 derivedin the first approximation and shown in Figure 2 outlinesthe minor change of the cable tension force in the vicinityof the ordinate (119873119898119892) = 1 (119873119898119892) isin [09875 10233]
for 119897 = 0206m in Figure 2(a) (119873119898119892) isin [0994 10122]
for 119897 = 0412m in Figure 2(b) (119873119898119892) isin [0998 1004] for119897 = 0618m in Figure 2(c) and (119873119898119892) isin [099933 10013]
for 119897 = 0825m in Figure 2(d) So the assumption (14)really takes place as shown in Figure 2 The same effect for(119873119898119892)Mitrev isin [094 104] has been derived by Mitrev andGrigorov [23 Mitrevrsquos Figure 7 in page 89] that confirmsassumption (14) An analogous effect for dimensionless cable
8 The Scientific World Journal
Camera
Bearing
Boom
Laser pointer
Slewing axis
CableLower plate
M
Light-emitting diodeRegular grid 1200mm times 700mmwith square cells 200mm times 20mm
B
D
O2
Figure 4 The experimental measurement system for payload 119872
swaying during crane boom slewing
force (119873119898119892)Maczynski isin [0996 1005] has been derived byMaczynski and Wojciech [24 Maczynskirsquos Figure 10 in page278] which also reaffirms the assumption (14)
In published work by Sakawa et al ([25] Figure 3 at page552 Figure 4 at page 552 Figure 5 at page 554 and Figure 6at page 554) the small Sakawa values 119889119911119889119905 le 01 (Figures 3and 4) and 119889119911119889119905 le 005 (Figures 5 and 6) of 119911-projectionsfor payload velocities have been shown which confirms thesmall angle assumption119873 asymp 119898119892 (14)
7 Discussion and Analysis of Basic Results forMathematical and Physical Simulation
The relative trajectories for load119872 swaying in Figure 3 showequality of maximum values for relative 119909 and 119910 payloadcoordinates
119909max = 119910max = 1198601+ 1198602=
120596119890(119877 + 119910dyn)
119896 (23)
The formula (23) outlines that values 119909max and 119910max inFigure 3 increase with growth of boom slewing velocity 120596
119890
and with increased cable length 119897 The 119910dyn influence on thevalues of 119909max and 119910max is negligible
Equation (18) shows that the free oscillation frequencies]1and ]
2depend on the boom slewing velocity 120596
119890and
natural frequency 119896 of the payload with a fixed pivot point119861 The frequencies ]
1and ]
2essentially depend on the
pendulum length 119897 because 119896 ≫ 120596119890 Kinematically saying
the miscoordination of frequencies ]1and ]
2is ]1minus ]2=
2120596119890and is determined by the crane boom slewing velocity
120596119890 Dynamically saying the value of miscoordination is
governed by the Coriolis acceleration-induced DrsquoAlembertrsquosinertia force
Computations shown in Figure 3 for relative payload119872 swaying show that the clockwise direction of rotationfor relative oscillations is opposite in direction from thecounterclockwise direction of rotation for the crane boomThis effect follows from the conservation of position of theplane 119910
21199112of oscillations of load 119872 in the fixed inertial
coordinate system 119909211991021199112
The comparative analysis of computational (1) and exper-imental (2) absolute payload trajectories is shown in Fig-ure 5(c)The quantity of the local maximums in Figure 5(a) is8 for theoretical curve 1 So the theoretical period for relativeload swaying is 119879theor = 187 s The quantity of the localmaximums in Figure 5(b) is 75 for experimental curve 2Theperiod for experimental curve 2 in Figure 5(b) is 119879experim =
2 s The discrepancy between the values of theoretical andexperimental periods does not exceed 7
The experimental absolute trajectory (2) in Figures 5(b)and 5(c) outlines the additional relative swaying of payload119872 after crane boom stop which has the elliptical form inthe vicinity of the point (0 minus05) in the plane 119909
21199102for 120593119890=
180∘ The remaining payload motions after crane boom stop
are the small oscillations of the payload with the fixed pivotcenter
8 Final Conclusions
The closed system of nonlinear ODEs for payload relativeswaying has been derived in relative Cartesian coordinateswith an introduction of Lagrange equations and a geometricconstraint equation
The explicit form of the dependence of the cable reactionforce as a function of the relative payload coordinates 119909
1 1199101
1199111and their first and second time derivatives has been found
Derived complex dependency of the cable reaction force onthe abovementioned variables determines the nonlinearity ofthe present problem
The deviation of cable reaction force frompayload gravityforce is small This fact allowed the derivation of a linearizedODE system for payload swaying in relative Cartesian coor-dinates and verified the small relative Cartesian coordinatesrsquoassumption The analytical expressions for relative payloadpath have been derived
Derived results have good agreement with experimentsand known published data
The Scientific World Journal 9
05
04
03
02
01
0
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
t = 15 s
1
Point O2
2R = 1 (m)
1
PointnP i OO2OO
y2 (m)
x2 (m)(Point D)
(Point M)
(a)
05
04
03
02
01
02R = 1 (m)
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
2
4
3
Rotational directionPoint O2
t = 18 s
(Point D)
(Point M)
(Point B)
x2 (m)
y2 (m)
(b)
1 2
4
Point O2
2R = 1 (m)
y2(m)
x2(m)
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
(Point D)
(Point M) (Point M)
05
04
03
02
01
0
(c)
Figure 5 Calculated 1 (a c) and experimental 2 (b c) absolute trajectories for load119872 where 3 is the trajectory of boom point 119861 (b) 4 is thecenter 119874
2(D) of boom rotation (b c)
Disclosure
The submission of the authorsrsquo paper implies that it has notbeen previously published that it is not under considerationfor publication elsewhere and that it will not be publishedelsewhere in the same form without the written permissionof the editors
Conflict of Interests
The authors Alexander V Perig Alexander N Stadnik andAlexander I Deriglazov declare that there is no conflict ofinterests regarding the publication of this paper
References
[1] EMAbdel-Rahman andAHNayfeh ldquoPendulation reductionin boom cranes using cable length manipulationrdquo NonlinearDynamics vol 27 no 3 pp 255ndash269 2002
[2] W Adamiec-Wojcik I P Fałat A Maczynski and S WojciechldquoLoad stabilisation in an A-framemdasha type of an offshore cranerdquoThe Archive of Mechanical Engineering vol 56 no 1 pp 37ndash592009
[3] P J Aston ldquoBifurcations of the horizontally forced sphericalpendulumrdquoMethods in AppliedMechanics and Engineering vol170 no 3-4 pp 343ndash3353 1999
[4] P Betsch M Quasem and S Uhlar ldquoNumerical integration ofdiscretemechanical systems withmixed holonomic and controlconstraintsrdquo Journal of Mechanical Science and Technology vol23 no 4 pp 1012ndash1018 2009
[5] W Blajer and K Kołodziejczyk ldquoA geometric approach tosolving problems of control constraints theory and a DAEframeworkrdquoMultibody System Dynamics vol 11 no 4 pp 343ndash364 2004
[6] W Blajer and K Kołodziejczyk ldquoControl of underactuatedmechanical systems with servo-constraintsrdquoNonlinear Dynam-ics vol 50 no 4 pp 781ndash791 2007
[7] W Blajer and K Kołodziejczyk ldquoModeling of underactuatedmechanical systems in partly specified motionrdquo Journal ofTheoretical and Applied Mechanics vol 46 no 2 pp 383ndash3942008
[8] W Blajer and K Kołodziejczyk ldquoThe use of dependent coor-dinates in modeling and simulation of cranes executing aload prescribed motionrdquo The Archive of Mechanical Engineer-ing vol 3 pp 209ndash222 2009 httpamemeilpweduplindexphpengcontentdownload3731748fileart 2009 3 02pdf
[9] W Blajer A Czaplicki K Dziewiecki and Z Mazur ldquoInfluenceof selected modeling and computational issues on muscle forceestimatesrdquoMultibody System Dynamics vol 24 no 4 pp 473ndash492 2010
[10] W Blajer and K Kołodziejczyk ldquoImproved DAE formulationfor inverse dynamics simulation of cranesrdquo Multibody SystemDynamics vol 25 no 2 pp 131ndash143 2011
10 The Scientific World Journal
[11] J H Cha S H Ham K Y Lee and M I Roh ldquoApplicationof a topological modelling approach of multi-body systemdynamics to simulation of multi-floating cranes in shipyardsrdquoProceedings of the Institution ofMechanical Engineers K vol 224no 4 pp 365ndash373 2010
[12] K Ellermann E Kreuzer and M Markiewicz ldquoNonlineardynamics of floating cranesrdquo Nonlinear Dynamics vol 27 no2 pp 107ndash183 2002
[13] T Erneux and T Kalmar-Nagy ldquoNonlinear stability of a delayedfeedback controlled container cranerdquo Journal of Vibration andControl vol 13 no 5 pp 603ndash616 2007
[14] G Glossiotis and I Antoniadis ldquoPayload sway suppression inrotary cranes by digital filtering of the commanded inputsrdquoProceedings of the Institution of Mechanical Engineers K vol 217no 2 pp 99ndash109 2003
[15] R A Ibrahim ldquoExcitation-induced stability and phase transi-tion a reviewrdquo Journal of Vibration and Control vol 12 no 10pp 1093ndash1170 2006
[16] J Kortelainen and A Mikkola ldquoSemantic data model inmultibody system simulationrdquo Proceedings of the Institution ofMechanical Engineers K vol 224 no 4 pp 341ndash352 2010
[17] R Mitrev ldquoMathematical modelling of translational motion ofrail-guided cart with suspended payloadrdquo Journal of ZhejiangUniversity Science A vol 8 no 9 pp 1395ndash1400 2007
[18] B Grigorov and R Mitrev ldquoA NewtonmdashEuler approach to thefreely suspended load swinging problemrdquo Recent Journal vol10 no 26 pp 109ndash112 2009
[19] MOsinski and SWojciech ldquoApplication of nonlinear optimisa-tion methods to input shaping of the hoist drive of an off-shorecranerdquo Nonlinear Dynamics vol 17 no 4 pp 369ndash386 1998
[20] H L Ren X LWang Y J Hu and C G Li ldquoDynamic responseanalysis of a moored crane-ship with a flexible boomrdquo Journalof Zhejiang University Science A vol 9 no 1 pp 26ndash31 2008
[21] H Schaub ldquoRate-based ship-mounted crane payload pendula-tion control systemrdquo Control Engineering Practice vol 16 no 1pp 132ndash145 2008
[22] N Uchiyama ldquoRobust control for overhead cranes by partialstate feedbackrdquo Proceedings of the Institution of MechanicalEngineers I vol 223 no 4 pp 575ndash580 2009
[23] R Mitrev and B Grigorov ldquoDynamic behaviour of a spheri-cal pendulum with spatially moving pivotrdquo Zeszyty NaukowePolitechniki Poznanskiej Budowa Maszyn i Zarządzanie Pro-dukcją vol 9 pp 81ndash91 2008
[24] A Maczynski and S Wojciech ldquoDynamics of a mobile craneand optimisation of the slewing motion of its upper structurerdquoNonlinear Dynamics vol 32 no 3 pp 259ndash290 2003
[25] Y Sakawa Y Shindo and Y Hashimoto ldquoOptimal control of arotary cranerdquo Journal of Optimization Theory and Applicationsvol 35 no 4 pp 535ndash557 1981
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

The Scientific World Journal 3
z2
z1
y2
y1
O2
O1
x2
x1
120593e
1205722
1205721
Adyn
Ast
= d120593edt
H
D
l
R
B
Δ
x
y
M
O
z
120579
rarrVr
rarrVe
rarr120596e120596e
rarrN
mrarrg
Figure 1 Computational spatial scheme of spherical pendulum119872 swaying on the cable119872119861 during crane boom 1198611198742slewing motion for the
linearized model derivation in Cartesian coordinates
At time 119905 = 0 the load 119872 has zero absolute velocity andthe initial relative velocity is 119881
119903119909(0) = +120596
119890sdot 119861119863 (Figure 1)
In Figure 1 we denote the angle 120579 which is the currentangle 119860 st1198742119872 that is the angle between the axis 119910
1and
the radius-vector O2M where sin(120579) = 11990911198742119872 cos(120579) =
(119877+1199101)1198742119872The vertical coordinate 119911
1in Figure 1 is defined
as 1199111= 119897 minus 119897 sdot cos(120572
1) where 120572
1is the angle between the cable
119872119861 and the verticalFor small angles 120572
1 the projections of the absolute
velocity vector may be written as
1198811199091
= (1198891199091
119889119905) minus 119881119890sdot cos (120579)
1198811199101
= (1198891199101
119889119905) + 119881119890sdot sin (120579)
1198811199111
= (1198891199111
119889119905) = (
1198891205721
119889119905) sdot 119897 sdot sin (120572
1)
(1)
Taking into account Figure 1 the system of (1) for theprojections of the absolute velocity vector takes the followingform
1198811199091
= (1198891199091
119889119905) minus (
119889120593119890
119889119905) (119877 + 119910
1)
1198811199101
= (1198891199101
119889119905) + (
119889120593119890
119889119905) 1199091
1198811199111
= (1198891199111
119889119905)
(2)
The square of absolute payload119872 velocitymay be writtenas 1198812abs = 119881
2
1199091
+ 1198812
1199101
+ 1198812
1199111
1198812
abs = (1198891199091
119889119905)
2
+ (1198891199101
119889119905)
2
+ (1198891199111
119889119905)
2
4 The Scientific World Journal
+ (119889120593119890
119889119905)
2
(1199092
1+ (1199101+ 119877)2
)
+ 2(119889120593119890
119889119905)(1199091(1198891199101
119889119905) minus (119910
1+ 119877) (
1198891199091
119889119905))
= ((1198891199091
119889119905) minus (
119889120593119890
119889119905) (119877 + 119910
1))
2
+ ((1198891199101
119889119905) + (
119889120593119890
119889119905) 1199091)
2
+ (1198891199111
119889119905)
2
(3)
3 Dynamic Analysis
The slewing motion of the mechanical system ldquocrane boom1198611198742-load 119872rdquo in Figure 1 is governed by the vector equation
for the rate of change of moment of momentum H11987423
for thesystem ldquocrane boom 119861119874
2-load119872rdquo with respect to point119874
2in
the inertial reference frame 119909211991021199112
(119909211991021199112)119889H11987423
119889119905= sumM1198742 (4)
The vector equation (4) contains the following compo-nents
H11987423
= 1198681198742
33120596119890 (5)
1198681198742
33= (1198681198742
33)1198611198742
+ 119898(1199092
1+ (119877 + 119910
1)2
) (6)
sumM1198742 = M1198742119863119879
minusM1198742119865119879
= (1198721198742
119863119879minus1198721198742
119865119879) k (7)
where (119868119874233)1198611198742
is the element of mass moment of inertia forthe crane boom119861119874
2in inertial fixed on earth reference frame
119909211991021199112with respect to unit vector k and119898(119909
2
1+ (119877 + 119910
1)2) is
the element of mass moment of inertia for the payload119872 ininertial fixed on earth reference frame 119909
211991021199112with respect to
unit vector kThe external moment of gravitational forceM1198742(mg) = 0
in (4) and (7) becausemg uarrdarr kFor the system ldquocrane boom-payloadrdquo the cable reaction
force N is the internal force So in (4) and (7) we haveM1198742(N) = 0
Substitution of (5) (6) and (7) into (4) yields thefollowing scalar equation for the rate of change of momentof momentum 119867
1198742
3for the system ldquocrane boom 119861119874
2-load
119872rdquo with respect to point 1198742in the inertial reference frame
119909211991021199112
119889
119889119905(((1198681198742
33)1198611198742
+ 119898(1199092
1+ (119877 + 119910
1)2
)) (119889120593119890
119889119905))
= 1198721198742
119863119879minus1198721198742
119865119879
(8)
where driving1198721198742119863119879
and frictional1198721198742119865119879
torques are the tech-nically defined functions for specific electric drive systems
4 Nonlinear Mathematical Model withLagrange Equationsrsquo Introduction
Taking into account (3) for the square of absolute payload119872velocity 1198812abs and by adding the kinetic energy for a slewingcrane boom according to (6) we will have the followingexpression for ldquocrane boom-payloadrdquo kinetic energy
119879 =119898
2(((
1198891199091
119889119905) minus (
119889120593119890
119889119905) (119877 + 119910
1))
2
+((1198891199101
119889119905) + (
119889120593119890
119889119905) 1199091)
2
+ (1198891199111
119889119905)
2
)
+1198681198742
33
2(119889120593119890
119889119905)
2
(9)
For further analysis we will assume that the crane boomslewing angular velocity is the constant 119889120593
119890119889119905 = 120596
119890 We will
use the derived expression for kinetic energy for the left-handsides of Lagrange equations in the noninertial reference frame119909111991011199111
119889
119889119905(120597119879
1205971
) minus120597119879
1205971199091
= 1198761199091
119889
119889119905(120597119879
120597 1199101
) minus120597119879
1205971199101
= 1198761199101
119889
119889119905(120597119879
1205971
) minus120597119879
1205971199111
= 1198761199111
(10)
Taking into account the nonlinearity and nonconser-vatism of the cable reaction force N we have the followingformulae for the generalized forces in the noninertial refer-ence frame 119909
111991011199111
1198761199091
= minus 119873(1199091
119897)
1198761199101
= minus 119873(1199101
119897)
1198761199111
= + 119873(119897 minus 1199111
119897) minus 119898119892
(11)
Taking into account (9) (11) the equations (10) in thenoninertial reference frame 119909
111991011199111will finally take the
following form
119898(11988921199091
1198891199052) minus 119898(
119889120593119890
119889119905)
2
1199091minus 119898(
1198892120593119890
1198891199052) (119877 + 119910
1)
minus 2119898(119889120593119890
119889119905)(
1198891199101
119889119905) = minus119873(
1199091
119897)
119898(11988921199101
1198891199052) minus 119898(
119889120593119890
119889119905)
2
(119877 + 1199101) + 119898(
1198892120593119890
1198891199052)1199091
+ 2119898(119889120593119890
119889119905)(
1198891199091
119889119905) = minus119873(
1199101
119897)
The Scientific World Journal 5
119898(11988921199111
1198891199052) = minus119898119892 + 119873(
119897 minus 1199111
119897)
1198972= 1199092
1+ 1199102
1+ (1199111minus 119897)2
(12)
After two times differentiation of forth equations insystem (12) we will have the following formula for the cablereaction force119873 (Figure 2) from third equation of (12)
119873 = ((119898119897 [((1199091(11988921199091
1198891199052) + (
1198891199091
119889119905)
2
+ 1199101(11988921199101
1198891199052) + (
1198891199101
119889119905)
2
)
times (1198972minus 1199092
1minus 1199102
1)
+ (1199091(1198891199091
119889119905) + 1199101(1198891199101
119889119905))
2
)])
times (1198972minus 1199092
1minus 1199102
1)minus2
)
+119898119892119897
radic(1198972 minus 1199092
1minus 1199102
1)
(13)
So with an introduction of (13) to the first and secondequations of system (12) we will have the explicit nonlinearODE system for payload119872 swaying inCartesian coordinates
5 Linearized Mathematical Model
Further for the small angle 1205721 we may assume that 119911
1and
119889211991111198891199052 are the small parameters So the nonlinear equation
(13) yields
119873 asymp 119898119892 (14)
Then taking into account (14) the linearized system (12)for the two variables 119909
1and 119910
1takes the following form
11988921199091
1198891199052minus (
119889120593119890
119889119905)
2
1199091minus 2(
119889120593119890
119889119905)(
1198891199101
119889119905) = minus119892(
1199091
119897)
11988921199101
1198891199052minus (
119889120593119890
119889119905)
2
(119877 + 1199101) + 2 (
119889120593119890
119889119905)(
1198891199091
119889119905) = minus119892(
1199101
119897)
(15)
So we derive the system (15) of differential equationsfor relative motion of load 119872 on cable 119861119872 with a movablesuspension center 119861 which is fixed at the crane boom1198611198742 We assume that the crane boom 119861119874
2rotates with a
constant angular velocity 120596119890around vertical axis 119863119874
2 We
then transfer the origin of coordinate system 119874119909119910 (Figure 1)to the point 119860dyn of dynamic equilibrium for load 119872 andassume that 119909
1= 119909 119910
1= 119910 + 119910dyn (Figure 3) Then
the second equation of system (15) defines the amount ofdynamic deflection 119910dyn = 119860 st119860dyn = (120596
2
119890119877119897)(119892 minus 120596
2
119890119897)
Relative swaying paths of payload 119872 in the plane ofthe introduced relative coordinates 119909 and 119910 are shown inFigure 3 for successive increasing swaying times 119905
1= 125 s
(Figure 3(a)) 1199052= 3 s (Figure 3(b)) 119905
3= 10 s (Figure 3(c))
and 1199054= 25 s (Figure 3(d))
Then we have the normal system of two linear homo-geneous differential equations of second order for relativemotion of the load119872
(
1198632minus (1205962
119890minus (
119892
119897)) minus2120596
119890119863
2120596119890119863 119863
2minus (1205962
119890minus (
119892
119897))
)
times (119909 (119905)
119910 (119905)) = 0 119863 =
119889
119889119905
(16)
The determinant of natural frequencies matrix for thesystem (16) has the following form
1003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
1205822+ (
119892
119897) minus 1205962
119890minus2 sdot 120596
119890sdot 120582
2 sdot 120596119890sdot 120582 120582
2+ (
119892
119897) minus 1205962
119890
1003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
= 0 (17)
Using (17) we adjust the roots 1205821and 120582
2of secular
equation
1205821= plusmn]1sdot 119894 120582
2= plusmn]2sdot 119894 ]
1= 119896 + 120596
119890
]2= 119896 minus 120596
119890 119896 = radic
119892
119897 120596119890
= 119896
(18)
The initial conditions for the problem are as follows
119909 (0) = 0 119863119909 (0) = +119881119861= +120596119890119877
119910 (0) = minus119910dyn 119863119910 (0) = 0
(19)
Taking into account (18) and (19) the law of relativemotion for payload takes the following form
119909 (119905) = 1198601
119894
2(119890minus]1119894119905minus 119890
]1119894119905) + 119860
2
119894
2(119890minus]2119894119905minus 119890
]2119894119905)
119910 (119905) = 1198601
1
2(119890minus]1119894119905+ 119890
]1119894119905) minus 119860
2
1
2(119890minus]2119894119905+ 119890
]2119894119905)
(20)
After substitution of values of1198601and119860
2in (20) we have
the following law of payload119872 relative swaying motion withthe uniformly rotating pivot center
119909 (119905) = (
119881119861minus 119910dyn (119896 minus 120596
119890)
2119896)
119894
2(119890minus]1119894119905minus 119890
]1119894119905)
+ (
119881119861+ 119910dyn (119896 + 120596
119890)
2119896)
119894
2(119890minus]2119894119905minus 119890
]2119894119905)
119910 (119905) = (
119881119861minus 119910dyn (119896 minus 120596
119890)
2119896)1
2(119890minus]1119894119905+ 119890
]1119894119905)
minus (
119881119861+ 119910dyn (119896 + 120596
119890)
2119896)1
2(119890minus]2119894119905+ 119890
]2119894119905)
(21)
6 The Scientific World Journal
102
101
1
099
0 2 4 6 8 10
Dim
ensio
nles
s cab
le re
actio
n (N
mg)
t (s)l asymp 0206 (m) 120596e asymp 0449 (rads) k asymp 69 (rads)
(a)
0 2 4 6 8 10
Dim
ensio
nles
s cab
le re
actio
n (N
mg)
t (s)l asymp 0412 (m) 120596e asymp 0449 (rads) k asymp 488 (rads)
1012
1010
1008
1006
1004
1002
1
0998
0996
0994
(b)
0 2 4 6 8 10
Dim
ensio
nles
s cab
le re
actio
n (N
mg)
t (s)
1004
1002
1003
1001
1
0999
l asymp 0618 (m) 120596e asymp 0314 (rads) k asymp 3984 (rads)
(c)
0 2 4 6 8 10
Dim
ensio
nles
s cab
le re
actio
n (N
mg)
t (s)
10012
10010
10008
10006
10004
10002
1
09996
09994
09998
l asymp 0825 (m) 120596e asymp 0209 (rads) k asymp 3448 (rads)
(d)
Figure 2 Time dependencies of dimensionless cable reactions 119873119898119892 in the first approximation for fixed cable lengths 119897 = 0206m (a)119897 = 0412m (b) 119897 = 0618m (c) and 119897 = 0825m (d)
The relative trajectories for load119872on the cable in Figure 3have been derived for the following numerical values 119877 =
0492m 119892 = 981ms2 119897 = 0825m 119896 = (119892119897)05
asymp
3448 rads 119879 = 30 s 120596119890= 2120587119879 asymp 0209 rads 120572
1dyn =
000221 rad 119881119861
= 0103ms 119910dyn = 000182m ]1
=
119896 + 120596119890
= 3658 rads ]2
= 119896 minus 120596119890
= 3239 rads(Figure 3)
Numerical plots in Figure 3 show the payload119872 swayingin the noninertial reference frame (119874119909119910119911) In order tovisualize payload119872 absolute swaying path (Figures 4 and 5)
The Scientific World Journal 7
t1 = 125 s
y(x) l = 0825 (m) k asymp 3448 (rads) 120596e asymp 0209 (rads)
Relative trajectory of load M swayingfor linearized model
(a)
t2 = 3s
y(x) l = 0825 (m) k asymp 3448 (rads) 120596e asymp 0209 (rads)
Relative trajectory of load M swayingfor linearized model
(b)
t3 = 10 s
y(x) l = 0825 (m) k asymp 3448 (rads) 120596e asymp 0209 (rads)
Relative trajectory of load M swayingfor linearized model
(c)
y(x) l = 0825 (m) k asymp 3448 (rads) 120596e asymp 0209 (rads)
t4 = 25s
Relative trajectory of load M swayingfor linearized model
(d)
Figure 3The relative trajectories for load119872 on the cable during uniform rotational motion of the crane boom 1198611198742for the moments of time
1199051= 125 s (a) 119905
2= 3 s (b) 119905
3= 10 s (c) and 119905
4= 25 s (d)
in the fixed inertial reference frame (1198742119909211991021199112) we will
address the following transition formula
(1199092(119905)
1199102(119905)
) = (sin (120596
119890119905) cos (120596
119890119905)
minus cos (120596119890119905) sin (120596
119890119905)) (
119909 (119905)
119910 (119905) + 119877 + 119910dyn)
(22)
Derived computational plot for absolute payload swayingpath in the absolute coordinatesrsquo plane (119909
21199102) is shown in
Figure 5(a) for load119872 swaying time 1199051= 15 s and crane boom
transport slewing angle120593119890= 180
∘ In Figure 5(b) we show theexperimental plot for absolute payload swaying path in theabsolute coordinatesrsquo plane (119909
21199102) for load 119872 swaying time
1199052= 15 s and crane boom transport slewing angle 120593
119890= 180
∘which was built with an introduction of experimental setupin Figure 4
6 Comparison of Derived andKnown Published Results
The computational dimensionless cable force119873119898119892 derivedin the first approximation and shown in Figure 2 outlinesthe minor change of the cable tension force in the vicinityof the ordinate (119873119898119892) = 1 (119873119898119892) isin [09875 10233]
for 119897 = 0206m in Figure 2(a) (119873119898119892) isin [0994 10122]
for 119897 = 0412m in Figure 2(b) (119873119898119892) isin [0998 1004] for119897 = 0618m in Figure 2(c) and (119873119898119892) isin [099933 10013]
for 119897 = 0825m in Figure 2(d) So the assumption (14)really takes place as shown in Figure 2 The same effect for(119873119898119892)Mitrev isin [094 104] has been derived by Mitrev andGrigorov [23 Mitrevrsquos Figure 7 in page 89] that confirmsassumption (14) An analogous effect for dimensionless cable
8 The Scientific World Journal
Camera
Bearing
Boom
Laser pointer
Slewing axis
CableLower plate
M
Light-emitting diodeRegular grid 1200mm times 700mmwith square cells 200mm times 20mm
B
D
O2
Figure 4 The experimental measurement system for payload 119872
swaying during crane boom slewing
force (119873119898119892)Maczynski isin [0996 1005] has been derived byMaczynski and Wojciech [24 Maczynskirsquos Figure 10 in page278] which also reaffirms the assumption (14)
In published work by Sakawa et al ([25] Figure 3 at page552 Figure 4 at page 552 Figure 5 at page 554 and Figure 6at page 554) the small Sakawa values 119889119911119889119905 le 01 (Figures 3and 4) and 119889119911119889119905 le 005 (Figures 5 and 6) of 119911-projectionsfor payload velocities have been shown which confirms thesmall angle assumption119873 asymp 119898119892 (14)
7 Discussion and Analysis of Basic Results forMathematical and Physical Simulation
The relative trajectories for load119872 swaying in Figure 3 showequality of maximum values for relative 119909 and 119910 payloadcoordinates
119909max = 119910max = 1198601+ 1198602=
120596119890(119877 + 119910dyn)
119896 (23)
The formula (23) outlines that values 119909max and 119910max inFigure 3 increase with growth of boom slewing velocity 120596
119890
and with increased cable length 119897 The 119910dyn influence on thevalues of 119909max and 119910max is negligible
Equation (18) shows that the free oscillation frequencies]1and ]
2depend on the boom slewing velocity 120596
119890and
natural frequency 119896 of the payload with a fixed pivot point119861 The frequencies ]
1and ]
2essentially depend on the
pendulum length 119897 because 119896 ≫ 120596119890 Kinematically saying
the miscoordination of frequencies ]1and ]
2is ]1minus ]2=
2120596119890and is determined by the crane boom slewing velocity
120596119890 Dynamically saying the value of miscoordination is
governed by the Coriolis acceleration-induced DrsquoAlembertrsquosinertia force
Computations shown in Figure 3 for relative payload119872 swaying show that the clockwise direction of rotationfor relative oscillations is opposite in direction from thecounterclockwise direction of rotation for the crane boomThis effect follows from the conservation of position of theplane 119910
21199112of oscillations of load 119872 in the fixed inertial
coordinate system 119909211991021199112
The comparative analysis of computational (1) and exper-imental (2) absolute payload trajectories is shown in Fig-ure 5(c)The quantity of the local maximums in Figure 5(a) is8 for theoretical curve 1 So the theoretical period for relativeload swaying is 119879theor = 187 s The quantity of the localmaximums in Figure 5(b) is 75 for experimental curve 2Theperiod for experimental curve 2 in Figure 5(b) is 119879experim =
2 s The discrepancy between the values of theoretical andexperimental periods does not exceed 7
The experimental absolute trajectory (2) in Figures 5(b)and 5(c) outlines the additional relative swaying of payload119872 after crane boom stop which has the elliptical form inthe vicinity of the point (0 minus05) in the plane 119909
21199102for 120593119890=
180∘ The remaining payload motions after crane boom stop
are the small oscillations of the payload with the fixed pivotcenter
8 Final Conclusions
The closed system of nonlinear ODEs for payload relativeswaying has been derived in relative Cartesian coordinateswith an introduction of Lagrange equations and a geometricconstraint equation
The explicit form of the dependence of the cable reactionforce as a function of the relative payload coordinates 119909
1 1199101
1199111and their first and second time derivatives has been found
Derived complex dependency of the cable reaction force onthe abovementioned variables determines the nonlinearity ofthe present problem
The deviation of cable reaction force frompayload gravityforce is small This fact allowed the derivation of a linearizedODE system for payload swaying in relative Cartesian coor-dinates and verified the small relative Cartesian coordinatesrsquoassumption The analytical expressions for relative payloadpath have been derived
Derived results have good agreement with experimentsand known published data
The Scientific World Journal 9
05
04
03
02
01
0
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
t = 15 s
1
Point O2
2R = 1 (m)
1
PointnP i OO2OO
y2 (m)
x2 (m)(Point D)
(Point M)
(a)
05
04
03
02
01
02R = 1 (m)
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
2
4
3
Rotational directionPoint O2
t = 18 s
(Point D)
(Point M)
(Point B)
x2 (m)
y2 (m)
(b)
1 2
4
Point O2
2R = 1 (m)
y2(m)
x2(m)
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
(Point D)
(Point M) (Point M)
05
04
03
02
01
0
(c)
Figure 5 Calculated 1 (a c) and experimental 2 (b c) absolute trajectories for load119872 where 3 is the trajectory of boom point 119861 (b) 4 is thecenter 119874
2(D) of boom rotation (b c)
Disclosure
The submission of the authorsrsquo paper implies that it has notbeen previously published that it is not under considerationfor publication elsewhere and that it will not be publishedelsewhere in the same form without the written permissionof the editors
Conflict of Interests
The authors Alexander V Perig Alexander N Stadnik andAlexander I Deriglazov declare that there is no conflict ofinterests regarding the publication of this paper
References
[1] EMAbdel-Rahman andAHNayfeh ldquoPendulation reductionin boom cranes using cable length manipulationrdquo NonlinearDynamics vol 27 no 3 pp 255ndash269 2002
[2] W Adamiec-Wojcik I P Fałat A Maczynski and S WojciechldquoLoad stabilisation in an A-framemdasha type of an offshore cranerdquoThe Archive of Mechanical Engineering vol 56 no 1 pp 37ndash592009
[3] P J Aston ldquoBifurcations of the horizontally forced sphericalpendulumrdquoMethods in AppliedMechanics and Engineering vol170 no 3-4 pp 343ndash3353 1999
[4] P Betsch M Quasem and S Uhlar ldquoNumerical integration ofdiscretemechanical systems withmixed holonomic and controlconstraintsrdquo Journal of Mechanical Science and Technology vol23 no 4 pp 1012ndash1018 2009
[5] W Blajer and K Kołodziejczyk ldquoA geometric approach tosolving problems of control constraints theory and a DAEframeworkrdquoMultibody System Dynamics vol 11 no 4 pp 343ndash364 2004
[6] W Blajer and K Kołodziejczyk ldquoControl of underactuatedmechanical systems with servo-constraintsrdquoNonlinear Dynam-ics vol 50 no 4 pp 781ndash791 2007
[7] W Blajer and K Kołodziejczyk ldquoModeling of underactuatedmechanical systems in partly specified motionrdquo Journal ofTheoretical and Applied Mechanics vol 46 no 2 pp 383ndash3942008
[8] W Blajer and K Kołodziejczyk ldquoThe use of dependent coor-dinates in modeling and simulation of cranes executing aload prescribed motionrdquo The Archive of Mechanical Engineer-ing vol 3 pp 209ndash222 2009 httpamemeilpweduplindexphpengcontentdownload3731748fileart 2009 3 02pdf
[9] W Blajer A Czaplicki K Dziewiecki and Z Mazur ldquoInfluenceof selected modeling and computational issues on muscle forceestimatesrdquoMultibody System Dynamics vol 24 no 4 pp 473ndash492 2010
[10] W Blajer and K Kołodziejczyk ldquoImproved DAE formulationfor inverse dynamics simulation of cranesrdquo Multibody SystemDynamics vol 25 no 2 pp 131ndash143 2011
10 The Scientific World Journal
[11] J H Cha S H Ham K Y Lee and M I Roh ldquoApplicationof a topological modelling approach of multi-body systemdynamics to simulation of multi-floating cranes in shipyardsrdquoProceedings of the Institution ofMechanical Engineers K vol 224no 4 pp 365ndash373 2010
[12] K Ellermann E Kreuzer and M Markiewicz ldquoNonlineardynamics of floating cranesrdquo Nonlinear Dynamics vol 27 no2 pp 107ndash183 2002
[13] T Erneux and T Kalmar-Nagy ldquoNonlinear stability of a delayedfeedback controlled container cranerdquo Journal of Vibration andControl vol 13 no 5 pp 603ndash616 2007
[14] G Glossiotis and I Antoniadis ldquoPayload sway suppression inrotary cranes by digital filtering of the commanded inputsrdquoProceedings of the Institution of Mechanical Engineers K vol 217no 2 pp 99ndash109 2003
[15] R A Ibrahim ldquoExcitation-induced stability and phase transi-tion a reviewrdquo Journal of Vibration and Control vol 12 no 10pp 1093ndash1170 2006
[16] J Kortelainen and A Mikkola ldquoSemantic data model inmultibody system simulationrdquo Proceedings of the Institution ofMechanical Engineers K vol 224 no 4 pp 341ndash352 2010
[17] R Mitrev ldquoMathematical modelling of translational motion ofrail-guided cart with suspended payloadrdquo Journal of ZhejiangUniversity Science A vol 8 no 9 pp 1395ndash1400 2007
[18] B Grigorov and R Mitrev ldquoA NewtonmdashEuler approach to thefreely suspended load swinging problemrdquo Recent Journal vol10 no 26 pp 109ndash112 2009
[19] MOsinski and SWojciech ldquoApplication of nonlinear optimisa-tion methods to input shaping of the hoist drive of an off-shorecranerdquo Nonlinear Dynamics vol 17 no 4 pp 369ndash386 1998
[20] H L Ren X LWang Y J Hu and C G Li ldquoDynamic responseanalysis of a moored crane-ship with a flexible boomrdquo Journalof Zhejiang University Science A vol 9 no 1 pp 26ndash31 2008
[21] H Schaub ldquoRate-based ship-mounted crane payload pendula-tion control systemrdquo Control Engineering Practice vol 16 no 1pp 132ndash145 2008
[22] N Uchiyama ldquoRobust control for overhead cranes by partialstate feedbackrdquo Proceedings of the Institution of MechanicalEngineers I vol 223 no 4 pp 575ndash580 2009
[23] R Mitrev and B Grigorov ldquoDynamic behaviour of a spheri-cal pendulum with spatially moving pivotrdquo Zeszyty NaukowePolitechniki Poznanskiej Budowa Maszyn i Zarządzanie Pro-dukcją vol 9 pp 81ndash91 2008
[24] A Maczynski and S Wojciech ldquoDynamics of a mobile craneand optimisation of the slewing motion of its upper structurerdquoNonlinear Dynamics vol 32 no 3 pp 259ndash290 2003
[25] Y Sakawa Y Shindo and Y Hashimoto ldquoOptimal control of arotary cranerdquo Journal of Optimization Theory and Applicationsvol 35 no 4 pp 535ndash557 1981
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

4 The Scientific World Journal
+ (119889120593119890
119889119905)
2
(1199092
1+ (1199101+ 119877)2
)
+ 2(119889120593119890
119889119905)(1199091(1198891199101
119889119905) minus (119910
1+ 119877) (
1198891199091
119889119905))
= ((1198891199091
119889119905) minus (
119889120593119890
119889119905) (119877 + 119910
1))
2
+ ((1198891199101
119889119905) + (
119889120593119890
119889119905) 1199091)
2
+ (1198891199111
119889119905)
2
(3)
3 Dynamic Analysis
The slewing motion of the mechanical system ldquocrane boom1198611198742-load 119872rdquo in Figure 1 is governed by the vector equation
for the rate of change of moment of momentum H11987423
for thesystem ldquocrane boom 119861119874
2-load119872rdquo with respect to point119874
2in
the inertial reference frame 119909211991021199112
(119909211991021199112)119889H11987423
119889119905= sumM1198742 (4)
The vector equation (4) contains the following compo-nents
H11987423
= 1198681198742
33120596119890 (5)
1198681198742
33= (1198681198742
33)1198611198742
+ 119898(1199092
1+ (119877 + 119910
1)2
) (6)
sumM1198742 = M1198742119863119879
minusM1198742119865119879
= (1198721198742
119863119879minus1198721198742
119865119879) k (7)
where (119868119874233)1198611198742
is the element of mass moment of inertia forthe crane boom119861119874
2in inertial fixed on earth reference frame
119909211991021199112with respect to unit vector k and119898(119909
2
1+ (119877 + 119910
1)2) is
the element of mass moment of inertia for the payload119872 ininertial fixed on earth reference frame 119909
211991021199112with respect to
unit vector kThe external moment of gravitational forceM1198742(mg) = 0
in (4) and (7) becausemg uarrdarr kFor the system ldquocrane boom-payloadrdquo the cable reaction
force N is the internal force So in (4) and (7) we haveM1198742(N) = 0
Substitution of (5) (6) and (7) into (4) yields thefollowing scalar equation for the rate of change of momentof momentum 119867
1198742
3for the system ldquocrane boom 119861119874
2-load
119872rdquo with respect to point 1198742in the inertial reference frame
119909211991021199112
119889
119889119905(((1198681198742
33)1198611198742
+ 119898(1199092
1+ (119877 + 119910
1)2
)) (119889120593119890
119889119905))
= 1198721198742
119863119879minus1198721198742
119865119879
(8)
where driving1198721198742119863119879
and frictional1198721198742119865119879
torques are the tech-nically defined functions for specific electric drive systems
4 Nonlinear Mathematical Model withLagrange Equationsrsquo Introduction
Taking into account (3) for the square of absolute payload119872velocity 1198812abs and by adding the kinetic energy for a slewingcrane boom according to (6) we will have the followingexpression for ldquocrane boom-payloadrdquo kinetic energy
119879 =119898
2(((
1198891199091
119889119905) minus (
119889120593119890
119889119905) (119877 + 119910
1))
2
+((1198891199101
119889119905) + (
119889120593119890
119889119905) 1199091)
2
+ (1198891199111
119889119905)
2
)
+1198681198742
33
2(119889120593119890
119889119905)
2
(9)
For further analysis we will assume that the crane boomslewing angular velocity is the constant 119889120593
119890119889119905 = 120596
119890 We will
use the derived expression for kinetic energy for the left-handsides of Lagrange equations in the noninertial reference frame119909111991011199111
119889
119889119905(120597119879
1205971
) minus120597119879
1205971199091
= 1198761199091
119889
119889119905(120597119879
120597 1199101
) minus120597119879
1205971199101
= 1198761199101
119889
119889119905(120597119879
1205971
) minus120597119879
1205971199111
= 1198761199111
(10)
Taking into account the nonlinearity and nonconser-vatism of the cable reaction force N we have the followingformulae for the generalized forces in the noninertial refer-ence frame 119909
111991011199111
1198761199091
= minus 119873(1199091
119897)
1198761199101
= minus 119873(1199101
119897)
1198761199111
= + 119873(119897 minus 1199111
119897) minus 119898119892
(11)
Taking into account (9) (11) the equations (10) in thenoninertial reference frame 119909
111991011199111will finally take the
following form
119898(11988921199091
1198891199052) minus 119898(
119889120593119890
119889119905)
2
1199091minus 119898(
1198892120593119890
1198891199052) (119877 + 119910
1)
minus 2119898(119889120593119890
119889119905)(
1198891199101
119889119905) = minus119873(
1199091
119897)
119898(11988921199101
1198891199052) minus 119898(
119889120593119890
119889119905)
2
(119877 + 1199101) + 119898(
1198892120593119890
1198891199052)1199091
+ 2119898(119889120593119890
119889119905)(
1198891199091
119889119905) = minus119873(
1199101
119897)
The Scientific World Journal 5
119898(11988921199111
1198891199052) = minus119898119892 + 119873(
119897 minus 1199111
119897)
1198972= 1199092
1+ 1199102
1+ (1199111minus 119897)2
(12)
After two times differentiation of forth equations insystem (12) we will have the following formula for the cablereaction force119873 (Figure 2) from third equation of (12)
119873 = ((119898119897 [((1199091(11988921199091
1198891199052) + (
1198891199091
119889119905)
2
+ 1199101(11988921199101
1198891199052) + (
1198891199101
119889119905)
2
)
times (1198972minus 1199092
1minus 1199102
1)
+ (1199091(1198891199091
119889119905) + 1199101(1198891199101
119889119905))
2
)])
times (1198972minus 1199092
1minus 1199102
1)minus2
)
+119898119892119897
radic(1198972 minus 1199092
1minus 1199102
1)
(13)
So with an introduction of (13) to the first and secondequations of system (12) we will have the explicit nonlinearODE system for payload119872 swaying inCartesian coordinates
5 Linearized Mathematical Model
Further for the small angle 1205721 we may assume that 119911
1and
119889211991111198891199052 are the small parameters So the nonlinear equation
(13) yields
119873 asymp 119898119892 (14)
Then taking into account (14) the linearized system (12)for the two variables 119909
1and 119910
1takes the following form
11988921199091
1198891199052minus (
119889120593119890
119889119905)
2
1199091minus 2(
119889120593119890
119889119905)(
1198891199101
119889119905) = minus119892(
1199091
119897)
11988921199101
1198891199052minus (
119889120593119890
119889119905)
2
(119877 + 1199101) + 2 (
119889120593119890
119889119905)(
1198891199091
119889119905) = minus119892(
1199101
119897)
(15)
So we derive the system (15) of differential equationsfor relative motion of load 119872 on cable 119861119872 with a movablesuspension center 119861 which is fixed at the crane boom1198611198742 We assume that the crane boom 119861119874
2rotates with a
constant angular velocity 120596119890around vertical axis 119863119874
2 We
then transfer the origin of coordinate system 119874119909119910 (Figure 1)to the point 119860dyn of dynamic equilibrium for load 119872 andassume that 119909
1= 119909 119910
1= 119910 + 119910dyn (Figure 3) Then
the second equation of system (15) defines the amount ofdynamic deflection 119910dyn = 119860 st119860dyn = (120596
2
119890119877119897)(119892 minus 120596
2
119890119897)
Relative swaying paths of payload 119872 in the plane ofthe introduced relative coordinates 119909 and 119910 are shown inFigure 3 for successive increasing swaying times 119905
1= 125 s
(Figure 3(a)) 1199052= 3 s (Figure 3(b)) 119905
3= 10 s (Figure 3(c))
and 1199054= 25 s (Figure 3(d))
Then we have the normal system of two linear homo-geneous differential equations of second order for relativemotion of the load119872
(
1198632minus (1205962
119890minus (
119892
119897)) minus2120596
119890119863
2120596119890119863 119863
2minus (1205962
119890minus (
119892
119897))
)
times (119909 (119905)
119910 (119905)) = 0 119863 =
119889
119889119905
(16)
The determinant of natural frequencies matrix for thesystem (16) has the following form
1003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
1205822+ (
119892
119897) minus 1205962
119890minus2 sdot 120596
119890sdot 120582
2 sdot 120596119890sdot 120582 120582
2+ (
119892
119897) minus 1205962
119890
1003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
= 0 (17)
Using (17) we adjust the roots 1205821and 120582
2of secular
equation
1205821= plusmn]1sdot 119894 120582
2= plusmn]2sdot 119894 ]
1= 119896 + 120596
119890
]2= 119896 minus 120596
119890 119896 = radic
119892
119897 120596119890
= 119896
(18)
The initial conditions for the problem are as follows
119909 (0) = 0 119863119909 (0) = +119881119861= +120596119890119877
119910 (0) = minus119910dyn 119863119910 (0) = 0
(19)
Taking into account (18) and (19) the law of relativemotion for payload takes the following form
119909 (119905) = 1198601
119894
2(119890minus]1119894119905minus 119890
]1119894119905) + 119860
2
119894
2(119890minus]2119894119905minus 119890
]2119894119905)
119910 (119905) = 1198601
1
2(119890minus]1119894119905+ 119890
]1119894119905) minus 119860
2
1
2(119890minus]2119894119905+ 119890
]2119894119905)
(20)
After substitution of values of1198601and119860
2in (20) we have
the following law of payload119872 relative swaying motion withthe uniformly rotating pivot center
119909 (119905) = (
119881119861minus 119910dyn (119896 minus 120596
119890)
2119896)
119894
2(119890minus]1119894119905minus 119890
]1119894119905)
+ (
119881119861+ 119910dyn (119896 + 120596
119890)
2119896)
119894
2(119890minus]2119894119905minus 119890
]2119894119905)
119910 (119905) = (
119881119861minus 119910dyn (119896 minus 120596
119890)
2119896)1
2(119890minus]1119894119905+ 119890
]1119894119905)
minus (
119881119861+ 119910dyn (119896 + 120596
119890)
2119896)1
2(119890minus]2119894119905+ 119890
]2119894119905)
(21)
6 The Scientific World Journal
102
101
1
099
0 2 4 6 8 10
Dim
ensio
nles
s cab
le re
actio
n (N
mg)
t (s)l asymp 0206 (m) 120596e asymp 0449 (rads) k asymp 69 (rads)
(a)
0 2 4 6 8 10
Dim
ensio
nles
s cab
le re
actio
n (N
mg)
t (s)l asymp 0412 (m) 120596e asymp 0449 (rads) k asymp 488 (rads)
1012
1010
1008
1006
1004
1002
1
0998
0996
0994
(b)
0 2 4 6 8 10
Dim
ensio
nles
s cab
le re
actio
n (N
mg)
t (s)
1004
1002
1003
1001
1
0999
l asymp 0618 (m) 120596e asymp 0314 (rads) k asymp 3984 (rads)
(c)
0 2 4 6 8 10
Dim
ensio
nles
s cab
le re
actio
n (N
mg)
t (s)
10012
10010
10008
10006
10004
10002
1
09996
09994
09998
l asymp 0825 (m) 120596e asymp 0209 (rads) k asymp 3448 (rads)
(d)
Figure 2 Time dependencies of dimensionless cable reactions 119873119898119892 in the first approximation for fixed cable lengths 119897 = 0206m (a)119897 = 0412m (b) 119897 = 0618m (c) and 119897 = 0825m (d)
The relative trajectories for load119872on the cable in Figure 3have been derived for the following numerical values 119877 =
0492m 119892 = 981ms2 119897 = 0825m 119896 = (119892119897)05
asymp
3448 rads 119879 = 30 s 120596119890= 2120587119879 asymp 0209 rads 120572
1dyn =
000221 rad 119881119861
= 0103ms 119910dyn = 000182m ]1
=
119896 + 120596119890
= 3658 rads ]2
= 119896 minus 120596119890
= 3239 rads(Figure 3)
Numerical plots in Figure 3 show the payload119872 swayingin the noninertial reference frame (119874119909119910119911) In order tovisualize payload119872 absolute swaying path (Figures 4 and 5)
The Scientific World Journal 7
t1 = 125 s
y(x) l = 0825 (m) k asymp 3448 (rads) 120596e asymp 0209 (rads)
Relative trajectory of load M swayingfor linearized model
(a)
t2 = 3s
y(x) l = 0825 (m) k asymp 3448 (rads) 120596e asymp 0209 (rads)
Relative trajectory of load M swayingfor linearized model
(b)
t3 = 10 s
y(x) l = 0825 (m) k asymp 3448 (rads) 120596e asymp 0209 (rads)
Relative trajectory of load M swayingfor linearized model
(c)
y(x) l = 0825 (m) k asymp 3448 (rads) 120596e asymp 0209 (rads)
t4 = 25s
Relative trajectory of load M swayingfor linearized model
(d)
Figure 3The relative trajectories for load119872 on the cable during uniform rotational motion of the crane boom 1198611198742for the moments of time
1199051= 125 s (a) 119905
2= 3 s (b) 119905
3= 10 s (c) and 119905
4= 25 s (d)
in the fixed inertial reference frame (1198742119909211991021199112) we will
address the following transition formula
(1199092(119905)
1199102(119905)
) = (sin (120596
119890119905) cos (120596
119890119905)
minus cos (120596119890119905) sin (120596
119890119905)) (
119909 (119905)
119910 (119905) + 119877 + 119910dyn)
(22)
Derived computational plot for absolute payload swayingpath in the absolute coordinatesrsquo plane (119909
21199102) is shown in
Figure 5(a) for load119872 swaying time 1199051= 15 s and crane boom
transport slewing angle120593119890= 180
∘ In Figure 5(b) we show theexperimental plot for absolute payload swaying path in theabsolute coordinatesrsquo plane (119909
21199102) for load 119872 swaying time
1199052= 15 s and crane boom transport slewing angle 120593
119890= 180
∘which was built with an introduction of experimental setupin Figure 4
6 Comparison of Derived andKnown Published Results
The computational dimensionless cable force119873119898119892 derivedin the first approximation and shown in Figure 2 outlinesthe minor change of the cable tension force in the vicinityof the ordinate (119873119898119892) = 1 (119873119898119892) isin [09875 10233]
for 119897 = 0206m in Figure 2(a) (119873119898119892) isin [0994 10122]
for 119897 = 0412m in Figure 2(b) (119873119898119892) isin [0998 1004] for119897 = 0618m in Figure 2(c) and (119873119898119892) isin [099933 10013]
for 119897 = 0825m in Figure 2(d) So the assumption (14)really takes place as shown in Figure 2 The same effect for(119873119898119892)Mitrev isin [094 104] has been derived by Mitrev andGrigorov [23 Mitrevrsquos Figure 7 in page 89] that confirmsassumption (14) An analogous effect for dimensionless cable
8 The Scientific World Journal
Camera
Bearing
Boom
Laser pointer
Slewing axis
CableLower plate
M
Light-emitting diodeRegular grid 1200mm times 700mmwith square cells 200mm times 20mm
B
D
O2
Figure 4 The experimental measurement system for payload 119872
swaying during crane boom slewing
force (119873119898119892)Maczynski isin [0996 1005] has been derived byMaczynski and Wojciech [24 Maczynskirsquos Figure 10 in page278] which also reaffirms the assumption (14)
In published work by Sakawa et al ([25] Figure 3 at page552 Figure 4 at page 552 Figure 5 at page 554 and Figure 6at page 554) the small Sakawa values 119889119911119889119905 le 01 (Figures 3and 4) and 119889119911119889119905 le 005 (Figures 5 and 6) of 119911-projectionsfor payload velocities have been shown which confirms thesmall angle assumption119873 asymp 119898119892 (14)
7 Discussion and Analysis of Basic Results forMathematical and Physical Simulation
The relative trajectories for load119872 swaying in Figure 3 showequality of maximum values for relative 119909 and 119910 payloadcoordinates
119909max = 119910max = 1198601+ 1198602=
120596119890(119877 + 119910dyn)
119896 (23)
The formula (23) outlines that values 119909max and 119910max inFigure 3 increase with growth of boom slewing velocity 120596
119890
and with increased cable length 119897 The 119910dyn influence on thevalues of 119909max and 119910max is negligible
Equation (18) shows that the free oscillation frequencies]1and ]
2depend on the boom slewing velocity 120596
119890and
natural frequency 119896 of the payload with a fixed pivot point119861 The frequencies ]
1and ]
2essentially depend on the
pendulum length 119897 because 119896 ≫ 120596119890 Kinematically saying
the miscoordination of frequencies ]1and ]
2is ]1minus ]2=
2120596119890and is determined by the crane boom slewing velocity
120596119890 Dynamically saying the value of miscoordination is
governed by the Coriolis acceleration-induced DrsquoAlembertrsquosinertia force
Computations shown in Figure 3 for relative payload119872 swaying show that the clockwise direction of rotationfor relative oscillations is opposite in direction from thecounterclockwise direction of rotation for the crane boomThis effect follows from the conservation of position of theplane 119910
21199112of oscillations of load 119872 in the fixed inertial
coordinate system 119909211991021199112
The comparative analysis of computational (1) and exper-imental (2) absolute payload trajectories is shown in Fig-ure 5(c)The quantity of the local maximums in Figure 5(a) is8 for theoretical curve 1 So the theoretical period for relativeload swaying is 119879theor = 187 s The quantity of the localmaximums in Figure 5(b) is 75 for experimental curve 2Theperiod for experimental curve 2 in Figure 5(b) is 119879experim =
2 s The discrepancy between the values of theoretical andexperimental periods does not exceed 7
The experimental absolute trajectory (2) in Figures 5(b)and 5(c) outlines the additional relative swaying of payload119872 after crane boom stop which has the elliptical form inthe vicinity of the point (0 minus05) in the plane 119909
21199102for 120593119890=
180∘ The remaining payload motions after crane boom stop
are the small oscillations of the payload with the fixed pivotcenter
8 Final Conclusions
The closed system of nonlinear ODEs for payload relativeswaying has been derived in relative Cartesian coordinateswith an introduction of Lagrange equations and a geometricconstraint equation
The explicit form of the dependence of the cable reactionforce as a function of the relative payload coordinates 119909
1 1199101
1199111and their first and second time derivatives has been found
Derived complex dependency of the cable reaction force onthe abovementioned variables determines the nonlinearity ofthe present problem
The deviation of cable reaction force frompayload gravityforce is small This fact allowed the derivation of a linearizedODE system for payload swaying in relative Cartesian coor-dinates and verified the small relative Cartesian coordinatesrsquoassumption The analytical expressions for relative payloadpath have been derived
Derived results have good agreement with experimentsand known published data
The Scientific World Journal 9
05
04
03
02
01
0
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
t = 15 s
1
Point O2
2R = 1 (m)
1
PointnP i OO2OO
y2 (m)
x2 (m)(Point D)
(Point M)
(a)
05
04
03
02
01
02R = 1 (m)
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
2
4
3
Rotational directionPoint O2
t = 18 s
(Point D)
(Point M)
(Point B)
x2 (m)
y2 (m)
(b)
1 2
4
Point O2
2R = 1 (m)
y2(m)
x2(m)
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
(Point D)
(Point M) (Point M)
05
04
03
02
01
0
(c)
Figure 5 Calculated 1 (a c) and experimental 2 (b c) absolute trajectories for load119872 where 3 is the trajectory of boom point 119861 (b) 4 is thecenter 119874
2(D) of boom rotation (b c)
Disclosure
The submission of the authorsrsquo paper implies that it has notbeen previously published that it is not under considerationfor publication elsewhere and that it will not be publishedelsewhere in the same form without the written permissionof the editors
Conflict of Interests
The authors Alexander V Perig Alexander N Stadnik andAlexander I Deriglazov declare that there is no conflict ofinterests regarding the publication of this paper
References
[1] EMAbdel-Rahman andAHNayfeh ldquoPendulation reductionin boom cranes using cable length manipulationrdquo NonlinearDynamics vol 27 no 3 pp 255ndash269 2002
[2] W Adamiec-Wojcik I P Fałat A Maczynski and S WojciechldquoLoad stabilisation in an A-framemdasha type of an offshore cranerdquoThe Archive of Mechanical Engineering vol 56 no 1 pp 37ndash592009
[3] P J Aston ldquoBifurcations of the horizontally forced sphericalpendulumrdquoMethods in AppliedMechanics and Engineering vol170 no 3-4 pp 343ndash3353 1999
[4] P Betsch M Quasem and S Uhlar ldquoNumerical integration ofdiscretemechanical systems withmixed holonomic and controlconstraintsrdquo Journal of Mechanical Science and Technology vol23 no 4 pp 1012ndash1018 2009
[5] W Blajer and K Kołodziejczyk ldquoA geometric approach tosolving problems of control constraints theory and a DAEframeworkrdquoMultibody System Dynamics vol 11 no 4 pp 343ndash364 2004
[6] W Blajer and K Kołodziejczyk ldquoControl of underactuatedmechanical systems with servo-constraintsrdquoNonlinear Dynam-ics vol 50 no 4 pp 781ndash791 2007
[7] W Blajer and K Kołodziejczyk ldquoModeling of underactuatedmechanical systems in partly specified motionrdquo Journal ofTheoretical and Applied Mechanics vol 46 no 2 pp 383ndash3942008
[8] W Blajer and K Kołodziejczyk ldquoThe use of dependent coor-dinates in modeling and simulation of cranes executing aload prescribed motionrdquo The Archive of Mechanical Engineer-ing vol 3 pp 209ndash222 2009 httpamemeilpweduplindexphpengcontentdownload3731748fileart 2009 3 02pdf
[9] W Blajer A Czaplicki K Dziewiecki and Z Mazur ldquoInfluenceof selected modeling and computational issues on muscle forceestimatesrdquoMultibody System Dynamics vol 24 no 4 pp 473ndash492 2010
[10] W Blajer and K Kołodziejczyk ldquoImproved DAE formulationfor inverse dynamics simulation of cranesrdquo Multibody SystemDynamics vol 25 no 2 pp 131ndash143 2011
10 The Scientific World Journal
[11] J H Cha S H Ham K Y Lee and M I Roh ldquoApplicationof a topological modelling approach of multi-body systemdynamics to simulation of multi-floating cranes in shipyardsrdquoProceedings of the Institution ofMechanical Engineers K vol 224no 4 pp 365ndash373 2010
[12] K Ellermann E Kreuzer and M Markiewicz ldquoNonlineardynamics of floating cranesrdquo Nonlinear Dynamics vol 27 no2 pp 107ndash183 2002
[13] T Erneux and T Kalmar-Nagy ldquoNonlinear stability of a delayedfeedback controlled container cranerdquo Journal of Vibration andControl vol 13 no 5 pp 603ndash616 2007
[14] G Glossiotis and I Antoniadis ldquoPayload sway suppression inrotary cranes by digital filtering of the commanded inputsrdquoProceedings of the Institution of Mechanical Engineers K vol 217no 2 pp 99ndash109 2003
[15] R A Ibrahim ldquoExcitation-induced stability and phase transi-tion a reviewrdquo Journal of Vibration and Control vol 12 no 10pp 1093ndash1170 2006
[16] J Kortelainen and A Mikkola ldquoSemantic data model inmultibody system simulationrdquo Proceedings of the Institution ofMechanical Engineers K vol 224 no 4 pp 341ndash352 2010
[17] R Mitrev ldquoMathematical modelling of translational motion ofrail-guided cart with suspended payloadrdquo Journal of ZhejiangUniversity Science A vol 8 no 9 pp 1395ndash1400 2007
[18] B Grigorov and R Mitrev ldquoA NewtonmdashEuler approach to thefreely suspended load swinging problemrdquo Recent Journal vol10 no 26 pp 109ndash112 2009
[19] MOsinski and SWojciech ldquoApplication of nonlinear optimisa-tion methods to input shaping of the hoist drive of an off-shorecranerdquo Nonlinear Dynamics vol 17 no 4 pp 369ndash386 1998
[20] H L Ren X LWang Y J Hu and C G Li ldquoDynamic responseanalysis of a moored crane-ship with a flexible boomrdquo Journalof Zhejiang University Science A vol 9 no 1 pp 26ndash31 2008
[21] H Schaub ldquoRate-based ship-mounted crane payload pendula-tion control systemrdquo Control Engineering Practice vol 16 no 1pp 132ndash145 2008
[22] N Uchiyama ldquoRobust control for overhead cranes by partialstate feedbackrdquo Proceedings of the Institution of MechanicalEngineers I vol 223 no 4 pp 575ndash580 2009
[23] R Mitrev and B Grigorov ldquoDynamic behaviour of a spheri-cal pendulum with spatially moving pivotrdquo Zeszyty NaukowePolitechniki Poznanskiej Budowa Maszyn i Zarządzanie Pro-dukcją vol 9 pp 81ndash91 2008
[24] A Maczynski and S Wojciech ldquoDynamics of a mobile craneand optimisation of the slewing motion of its upper structurerdquoNonlinear Dynamics vol 32 no 3 pp 259ndash290 2003
[25] Y Sakawa Y Shindo and Y Hashimoto ldquoOptimal control of arotary cranerdquo Journal of Optimization Theory and Applicationsvol 35 no 4 pp 535ndash557 1981
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

The Scientific World Journal 5
119898(11988921199111
1198891199052) = minus119898119892 + 119873(
119897 minus 1199111
119897)
1198972= 1199092
1+ 1199102
1+ (1199111minus 119897)2
(12)
After two times differentiation of forth equations insystem (12) we will have the following formula for the cablereaction force119873 (Figure 2) from third equation of (12)
119873 = ((119898119897 [((1199091(11988921199091
1198891199052) + (
1198891199091
119889119905)
2
+ 1199101(11988921199101
1198891199052) + (
1198891199101
119889119905)
2
)
times (1198972minus 1199092
1minus 1199102
1)
+ (1199091(1198891199091
119889119905) + 1199101(1198891199101
119889119905))
2
)])
times (1198972minus 1199092
1minus 1199102
1)minus2
)
+119898119892119897
radic(1198972 minus 1199092
1minus 1199102
1)
(13)
So with an introduction of (13) to the first and secondequations of system (12) we will have the explicit nonlinearODE system for payload119872 swaying inCartesian coordinates
5 Linearized Mathematical Model
Further for the small angle 1205721 we may assume that 119911
1and
119889211991111198891199052 are the small parameters So the nonlinear equation
(13) yields
119873 asymp 119898119892 (14)
Then taking into account (14) the linearized system (12)for the two variables 119909
1and 119910
1takes the following form
11988921199091
1198891199052minus (
119889120593119890
119889119905)
2
1199091minus 2(
119889120593119890
119889119905)(
1198891199101
119889119905) = minus119892(
1199091
119897)
11988921199101
1198891199052minus (
119889120593119890
119889119905)
2
(119877 + 1199101) + 2 (
119889120593119890
119889119905)(
1198891199091
119889119905) = minus119892(
1199101
119897)
(15)
So we derive the system (15) of differential equationsfor relative motion of load 119872 on cable 119861119872 with a movablesuspension center 119861 which is fixed at the crane boom1198611198742 We assume that the crane boom 119861119874
2rotates with a
constant angular velocity 120596119890around vertical axis 119863119874
2 We
then transfer the origin of coordinate system 119874119909119910 (Figure 1)to the point 119860dyn of dynamic equilibrium for load 119872 andassume that 119909
1= 119909 119910
1= 119910 + 119910dyn (Figure 3) Then
the second equation of system (15) defines the amount ofdynamic deflection 119910dyn = 119860 st119860dyn = (120596
2
119890119877119897)(119892 minus 120596
2
119890119897)
Relative swaying paths of payload 119872 in the plane ofthe introduced relative coordinates 119909 and 119910 are shown inFigure 3 for successive increasing swaying times 119905
1= 125 s
(Figure 3(a)) 1199052= 3 s (Figure 3(b)) 119905
3= 10 s (Figure 3(c))
and 1199054= 25 s (Figure 3(d))
Then we have the normal system of two linear homo-geneous differential equations of second order for relativemotion of the load119872
(
1198632minus (1205962
119890minus (
119892
119897)) minus2120596
119890119863
2120596119890119863 119863
2minus (1205962
119890minus (
119892
119897))
)
times (119909 (119905)
119910 (119905)) = 0 119863 =
119889
119889119905
(16)
The determinant of natural frequencies matrix for thesystem (16) has the following form
1003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
1205822+ (
119892
119897) minus 1205962
119890minus2 sdot 120596
119890sdot 120582
2 sdot 120596119890sdot 120582 120582
2+ (
119892
119897) minus 1205962
119890
1003816100381610038161003816100381610038161003816100381610038161003816100381610038161003816
= 0 (17)
Using (17) we adjust the roots 1205821and 120582
2of secular
equation
1205821= plusmn]1sdot 119894 120582
2= plusmn]2sdot 119894 ]
1= 119896 + 120596
119890
]2= 119896 minus 120596
119890 119896 = radic
119892
119897 120596119890
= 119896
(18)
The initial conditions for the problem are as follows
119909 (0) = 0 119863119909 (0) = +119881119861= +120596119890119877
119910 (0) = minus119910dyn 119863119910 (0) = 0
(19)
Taking into account (18) and (19) the law of relativemotion for payload takes the following form
119909 (119905) = 1198601
119894
2(119890minus]1119894119905minus 119890
]1119894119905) + 119860
2
119894
2(119890minus]2119894119905minus 119890
]2119894119905)
119910 (119905) = 1198601
1
2(119890minus]1119894119905+ 119890
]1119894119905) minus 119860
2
1
2(119890minus]2119894119905+ 119890
]2119894119905)
(20)
After substitution of values of1198601and119860
2in (20) we have
the following law of payload119872 relative swaying motion withthe uniformly rotating pivot center
119909 (119905) = (
119881119861minus 119910dyn (119896 minus 120596
119890)
2119896)
119894
2(119890minus]1119894119905minus 119890
]1119894119905)
+ (
119881119861+ 119910dyn (119896 + 120596
119890)
2119896)
119894
2(119890minus]2119894119905minus 119890
]2119894119905)
119910 (119905) = (
119881119861minus 119910dyn (119896 minus 120596
119890)
2119896)1
2(119890minus]1119894119905+ 119890
]1119894119905)
minus (
119881119861+ 119910dyn (119896 + 120596
119890)
2119896)1
2(119890minus]2119894119905+ 119890
]2119894119905)
(21)
6 The Scientific World Journal
102
101
1
099
0 2 4 6 8 10
Dim
ensio
nles
s cab
le re
actio
n (N
mg)
t (s)l asymp 0206 (m) 120596e asymp 0449 (rads) k asymp 69 (rads)
(a)
0 2 4 6 8 10
Dim
ensio
nles
s cab
le re
actio
n (N
mg)
t (s)l asymp 0412 (m) 120596e asymp 0449 (rads) k asymp 488 (rads)
1012
1010
1008
1006
1004
1002
1
0998
0996
0994
(b)
0 2 4 6 8 10
Dim
ensio
nles
s cab
le re
actio
n (N
mg)
t (s)
1004
1002
1003
1001
1
0999
l asymp 0618 (m) 120596e asymp 0314 (rads) k asymp 3984 (rads)
(c)
0 2 4 6 8 10
Dim
ensio
nles
s cab
le re
actio
n (N
mg)
t (s)
10012
10010
10008
10006
10004
10002
1
09996
09994
09998
l asymp 0825 (m) 120596e asymp 0209 (rads) k asymp 3448 (rads)
(d)
Figure 2 Time dependencies of dimensionless cable reactions 119873119898119892 in the first approximation for fixed cable lengths 119897 = 0206m (a)119897 = 0412m (b) 119897 = 0618m (c) and 119897 = 0825m (d)
The relative trajectories for load119872on the cable in Figure 3have been derived for the following numerical values 119877 =
0492m 119892 = 981ms2 119897 = 0825m 119896 = (119892119897)05
asymp
3448 rads 119879 = 30 s 120596119890= 2120587119879 asymp 0209 rads 120572
1dyn =
000221 rad 119881119861
= 0103ms 119910dyn = 000182m ]1
=
119896 + 120596119890
= 3658 rads ]2
= 119896 minus 120596119890
= 3239 rads(Figure 3)
Numerical plots in Figure 3 show the payload119872 swayingin the noninertial reference frame (119874119909119910119911) In order tovisualize payload119872 absolute swaying path (Figures 4 and 5)
The Scientific World Journal 7
t1 = 125 s
y(x) l = 0825 (m) k asymp 3448 (rads) 120596e asymp 0209 (rads)
Relative trajectory of load M swayingfor linearized model
(a)
t2 = 3s
y(x) l = 0825 (m) k asymp 3448 (rads) 120596e asymp 0209 (rads)
Relative trajectory of load M swayingfor linearized model
(b)
t3 = 10 s
y(x) l = 0825 (m) k asymp 3448 (rads) 120596e asymp 0209 (rads)
Relative trajectory of load M swayingfor linearized model
(c)
y(x) l = 0825 (m) k asymp 3448 (rads) 120596e asymp 0209 (rads)
t4 = 25s
Relative trajectory of load M swayingfor linearized model
(d)
Figure 3The relative trajectories for load119872 on the cable during uniform rotational motion of the crane boom 1198611198742for the moments of time
1199051= 125 s (a) 119905
2= 3 s (b) 119905
3= 10 s (c) and 119905
4= 25 s (d)
in the fixed inertial reference frame (1198742119909211991021199112) we will
address the following transition formula
(1199092(119905)
1199102(119905)
) = (sin (120596
119890119905) cos (120596
119890119905)
minus cos (120596119890119905) sin (120596
119890119905)) (
119909 (119905)
119910 (119905) + 119877 + 119910dyn)
(22)
Derived computational plot for absolute payload swayingpath in the absolute coordinatesrsquo plane (119909
21199102) is shown in
Figure 5(a) for load119872 swaying time 1199051= 15 s and crane boom
transport slewing angle120593119890= 180
∘ In Figure 5(b) we show theexperimental plot for absolute payload swaying path in theabsolute coordinatesrsquo plane (119909
21199102) for load 119872 swaying time
1199052= 15 s and crane boom transport slewing angle 120593
119890= 180
∘which was built with an introduction of experimental setupin Figure 4
6 Comparison of Derived andKnown Published Results
The computational dimensionless cable force119873119898119892 derivedin the first approximation and shown in Figure 2 outlinesthe minor change of the cable tension force in the vicinityof the ordinate (119873119898119892) = 1 (119873119898119892) isin [09875 10233]
for 119897 = 0206m in Figure 2(a) (119873119898119892) isin [0994 10122]
for 119897 = 0412m in Figure 2(b) (119873119898119892) isin [0998 1004] for119897 = 0618m in Figure 2(c) and (119873119898119892) isin [099933 10013]
for 119897 = 0825m in Figure 2(d) So the assumption (14)really takes place as shown in Figure 2 The same effect for(119873119898119892)Mitrev isin [094 104] has been derived by Mitrev andGrigorov [23 Mitrevrsquos Figure 7 in page 89] that confirmsassumption (14) An analogous effect for dimensionless cable
8 The Scientific World Journal
Camera
Bearing
Boom
Laser pointer
Slewing axis
CableLower plate
M
Light-emitting diodeRegular grid 1200mm times 700mmwith square cells 200mm times 20mm
B
D
O2
Figure 4 The experimental measurement system for payload 119872
swaying during crane boom slewing
force (119873119898119892)Maczynski isin [0996 1005] has been derived byMaczynski and Wojciech [24 Maczynskirsquos Figure 10 in page278] which also reaffirms the assumption (14)
In published work by Sakawa et al ([25] Figure 3 at page552 Figure 4 at page 552 Figure 5 at page 554 and Figure 6at page 554) the small Sakawa values 119889119911119889119905 le 01 (Figures 3and 4) and 119889119911119889119905 le 005 (Figures 5 and 6) of 119911-projectionsfor payload velocities have been shown which confirms thesmall angle assumption119873 asymp 119898119892 (14)
7 Discussion and Analysis of Basic Results forMathematical and Physical Simulation
The relative trajectories for load119872 swaying in Figure 3 showequality of maximum values for relative 119909 and 119910 payloadcoordinates
119909max = 119910max = 1198601+ 1198602=
120596119890(119877 + 119910dyn)
119896 (23)
The formula (23) outlines that values 119909max and 119910max inFigure 3 increase with growth of boom slewing velocity 120596
119890
and with increased cable length 119897 The 119910dyn influence on thevalues of 119909max and 119910max is negligible
Equation (18) shows that the free oscillation frequencies]1and ]
2depend on the boom slewing velocity 120596
119890and
natural frequency 119896 of the payload with a fixed pivot point119861 The frequencies ]
1and ]
2essentially depend on the
pendulum length 119897 because 119896 ≫ 120596119890 Kinematically saying
the miscoordination of frequencies ]1and ]
2is ]1minus ]2=
2120596119890and is determined by the crane boom slewing velocity
120596119890 Dynamically saying the value of miscoordination is
governed by the Coriolis acceleration-induced DrsquoAlembertrsquosinertia force
Computations shown in Figure 3 for relative payload119872 swaying show that the clockwise direction of rotationfor relative oscillations is opposite in direction from thecounterclockwise direction of rotation for the crane boomThis effect follows from the conservation of position of theplane 119910
21199112of oscillations of load 119872 in the fixed inertial
coordinate system 119909211991021199112
The comparative analysis of computational (1) and exper-imental (2) absolute payload trajectories is shown in Fig-ure 5(c)The quantity of the local maximums in Figure 5(a) is8 for theoretical curve 1 So the theoretical period for relativeload swaying is 119879theor = 187 s The quantity of the localmaximums in Figure 5(b) is 75 for experimental curve 2Theperiod for experimental curve 2 in Figure 5(b) is 119879experim =
2 s The discrepancy between the values of theoretical andexperimental periods does not exceed 7
The experimental absolute trajectory (2) in Figures 5(b)and 5(c) outlines the additional relative swaying of payload119872 after crane boom stop which has the elliptical form inthe vicinity of the point (0 minus05) in the plane 119909
21199102for 120593119890=
180∘ The remaining payload motions after crane boom stop
are the small oscillations of the payload with the fixed pivotcenter
8 Final Conclusions
The closed system of nonlinear ODEs for payload relativeswaying has been derived in relative Cartesian coordinateswith an introduction of Lagrange equations and a geometricconstraint equation
The explicit form of the dependence of the cable reactionforce as a function of the relative payload coordinates 119909
1 1199101
1199111and their first and second time derivatives has been found
Derived complex dependency of the cable reaction force onthe abovementioned variables determines the nonlinearity ofthe present problem
The deviation of cable reaction force frompayload gravityforce is small This fact allowed the derivation of a linearizedODE system for payload swaying in relative Cartesian coor-dinates and verified the small relative Cartesian coordinatesrsquoassumption The analytical expressions for relative payloadpath have been derived
Derived results have good agreement with experimentsand known published data
The Scientific World Journal 9
05
04
03
02
01
0
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
t = 15 s
1
Point O2
2R = 1 (m)
1
PointnP i OO2OO
y2 (m)
x2 (m)(Point D)
(Point M)
(a)
05
04
03
02
01
02R = 1 (m)
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
2
4
3
Rotational directionPoint O2
t = 18 s
(Point D)
(Point M)
(Point B)
x2 (m)
y2 (m)
(b)
1 2
4
Point O2
2R = 1 (m)
y2(m)
x2(m)
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
(Point D)
(Point M) (Point M)
05
04
03
02
01
0
(c)
Figure 5 Calculated 1 (a c) and experimental 2 (b c) absolute trajectories for load119872 where 3 is the trajectory of boom point 119861 (b) 4 is thecenter 119874
2(D) of boom rotation (b c)
Disclosure
The submission of the authorsrsquo paper implies that it has notbeen previously published that it is not under considerationfor publication elsewhere and that it will not be publishedelsewhere in the same form without the written permissionof the editors
Conflict of Interests
The authors Alexander V Perig Alexander N Stadnik andAlexander I Deriglazov declare that there is no conflict ofinterests regarding the publication of this paper
References
[1] EMAbdel-Rahman andAHNayfeh ldquoPendulation reductionin boom cranes using cable length manipulationrdquo NonlinearDynamics vol 27 no 3 pp 255ndash269 2002
[2] W Adamiec-Wojcik I P Fałat A Maczynski and S WojciechldquoLoad stabilisation in an A-framemdasha type of an offshore cranerdquoThe Archive of Mechanical Engineering vol 56 no 1 pp 37ndash592009
[3] P J Aston ldquoBifurcations of the horizontally forced sphericalpendulumrdquoMethods in AppliedMechanics and Engineering vol170 no 3-4 pp 343ndash3353 1999
[4] P Betsch M Quasem and S Uhlar ldquoNumerical integration ofdiscretemechanical systems withmixed holonomic and controlconstraintsrdquo Journal of Mechanical Science and Technology vol23 no 4 pp 1012ndash1018 2009
[5] W Blajer and K Kołodziejczyk ldquoA geometric approach tosolving problems of control constraints theory and a DAEframeworkrdquoMultibody System Dynamics vol 11 no 4 pp 343ndash364 2004
[6] W Blajer and K Kołodziejczyk ldquoControl of underactuatedmechanical systems with servo-constraintsrdquoNonlinear Dynam-ics vol 50 no 4 pp 781ndash791 2007
[7] W Blajer and K Kołodziejczyk ldquoModeling of underactuatedmechanical systems in partly specified motionrdquo Journal ofTheoretical and Applied Mechanics vol 46 no 2 pp 383ndash3942008
[8] W Blajer and K Kołodziejczyk ldquoThe use of dependent coor-dinates in modeling and simulation of cranes executing aload prescribed motionrdquo The Archive of Mechanical Engineer-ing vol 3 pp 209ndash222 2009 httpamemeilpweduplindexphpengcontentdownload3731748fileart 2009 3 02pdf
[9] W Blajer A Czaplicki K Dziewiecki and Z Mazur ldquoInfluenceof selected modeling and computational issues on muscle forceestimatesrdquoMultibody System Dynamics vol 24 no 4 pp 473ndash492 2010
[10] W Blajer and K Kołodziejczyk ldquoImproved DAE formulationfor inverse dynamics simulation of cranesrdquo Multibody SystemDynamics vol 25 no 2 pp 131ndash143 2011
10 The Scientific World Journal
[11] J H Cha S H Ham K Y Lee and M I Roh ldquoApplicationof a topological modelling approach of multi-body systemdynamics to simulation of multi-floating cranes in shipyardsrdquoProceedings of the Institution ofMechanical Engineers K vol 224no 4 pp 365ndash373 2010
[12] K Ellermann E Kreuzer and M Markiewicz ldquoNonlineardynamics of floating cranesrdquo Nonlinear Dynamics vol 27 no2 pp 107ndash183 2002
[13] T Erneux and T Kalmar-Nagy ldquoNonlinear stability of a delayedfeedback controlled container cranerdquo Journal of Vibration andControl vol 13 no 5 pp 603ndash616 2007
[14] G Glossiotis and I Antoniadis ldquoPayload sway suppression inrotary cranes by digital filtering of the commanded inputsrdquoProceedings of the Institution of Mechanical Engineers K vol 217no 2 pp 99ndash109 2003
[15] R A Ibrahim ldquoExcitation-induced stability and phase transi-tion a reviewrdquo Journal of Vibration and Control vol 12 no 10pp 1093ndash1170 2006
[16] J Kortelainen and A Mikkola ldquoSemantic data model inmultibody system simulationrdquo Proceedings of the Institution ofMechanical Engineers K vol 224 no 4 pp 341ndash352 2010
[17] R Mitrev ldquoMathematical modelling of translational motion ofrail-guided cart with suspended payloadrdquo Journal of ZhejiangUniversity Science A vol 8 no 9 pp 1395ndash1400 2007
[18] B Grigorov and R Mitrev ldquoA NewtonmdashEuler approach to thefreely suspended load swinging problemrdquo Recent Journal vol10 no 26 pp 109ndash112 2009
[19] MOsinski and SWojciech ldquoApplication of nonlinear optimisa-tion methods to input shaping of the hoist drive of an off-shorecranerdquo Nonlinear Dynamics vol 17 no 4 pp 369ndash386 1998
[20] H L Ren X LWang Y J Hu and C G Li ldquoDynamic responseanalysis of a moored crane-ship with a flexible boomrdquo Journalof Zhejiang University Science A vol 9 no 1 pp 26ndash31 2008
[21] H Schaub ldquoRate-based ship-mounted crane payload pendula-tion control systemrdquo Control Engineering Practice vol 16 no 1pp 132ndash145 2008
[22] N Uchiyama ldquoRobust control for overhead cranes by partialstate feedbackrdquo Proceedings of the Institution of MechanicalEngineers I vol 223 no 4 pp 575ndash580 2009
[23] R Mitrev and B Grigorov ldquoDynamic behaviour of a spheri-cal pendulum with spatially moving pivotrdquo Zeszyty NaukowePolitechniki Poznanskiej Budowa Maszyn i Zarządzanie Pro-dukcją vol 9 pp 81ndash91 2008
[24] A Maczynski and S Wojciech ldquoDynamics of a mobile craneand optimisation of the slewing motion of its upper structurerdquoNonlinear Dynamics vol 32 no 3 pp 259ndash290 2003
[25] Y Sakawa Y Shindo and Y Hashimoto ldquoOptimal control of arotary cranerdquo Journal of Optimization Theory and Applicationsvol 35 no 4 pp 535ndash557 1981
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

6 The Scientific World Journal
102
101
1
099
0 2 4 6 8 10
Dim
ensio
nles
s cab
le re
actio
n (N
mg)
t (s)l asymp 0206 (m) 120596e asymp 0449 (rads) k asymp 69 (rads)
(a)
0 2 4 6 8 10
Dim
ensio
nles
s cab
le re
actio
n (N
mg)
t (s)l asymp 0412 (m) 120596e asymp 0449 (rads) k asymp 488 (rads)
1012
1010
1008
1006
1004
1002
1
0998
0996
0994
(b)
0 2 4 6 8 10
Dim
ensio
nles
s cab
le re
actio
n (N
mg)
t (s)
1004
1002
1003
1001
1
0999
l asymp 0618 (m) 120596e asymp 0314 (rads) k asymp 3984 (rads)
(c)
0 2 4 6 8 10
Dim
ensio
nles
s cab
le re
actio
n (N
mg)
t (s)
10012
10010
10008
10006
10004
10002
1
09996
09994
09998
l asymp 0825 (m) 120596e asymp 0209 (rads) k asymp 3448 (rads)
(d)
Figure 2 Time dependencies of dimensionless cable reactions 119873119898119892 in the first approximation for fixed cable lengths 119897 = 0206m (a)119897 = 0412m (b) 119897 = 0618m (c) and 119897 = 0825m (d)
The relative trajectories for load119872on the cable in Figure 3have been derived for the following numerical values 119877 =
0492m 119892 = 981ms2 119897 = 0825m 119896 = (119892119897)05
asymp
3448 rads 119879 = 30 s 120596119890= 2120587119879 asymp 0209 rads 120572
1dyn =
000221 rad 119881119861
= 0103ms 119910dyn = 000182m ]1
=
119896 + 120596119890
= 3658 rads ]2
= 119896 minus 120596119890
= 3239 rads(Figure 3)
Numerical plots in Figure 3 show the payload119872 swayingin the noninertial reference frame (119874119909119910119911) In order tovisualize payload119872 absolute swaying path (Figures 4 and 5)
The Scientific World Journal 7
t1 = 125 s
y(x) l = 0825 (m) k asymp 3448 (rads) 120596e asymp 0209 (rads)
Relative trajectory of load M swayingfor linearized model
(a)
t2 = 3s
y(x) l = 0825 (m) k asymp 3448 (rads) 120596e asymp 0209 (rads)
Relative trajectory of load M swayingfor linearized model
(b)
t3 = 10 s
y(x) l = 0825 (m) k asymp 3448 (rads) 120596e asymp 0209 (rads)
Relative trajectory of load M swayingfor linearized model
(c)
y(x) l = 0825 (m) k asymp 3448 (rads) 120596e asymp 0209 (rads)
t4 = 25s
Relative trajectory of load M swayingfor linearized model
(d)
Figure 3The relative trajectories for load119872 on the cable during uniform rotational motion of the crane boom 1198611198742for the moments of time
1199051= 125 s (a) 119905
2= 3 s (b) 119905
3= 10 s (c) and 119905
4= 25 s (d)
in the fixed inertial reference frame (1198742119909211991021199112) we will
address the following transition formula
(1199092(119905)
1199102(119905)
) = (sin (120596
119890119905) cos (120596
119890119905)
minus cos (120596119890119905) sin (120596
119890119905)) (
119909 (119905)
119910 (119905) + 119877 + 119910dyn)
(22)
Derived computational plot for absolute payload swayingpath in the absolute coordinatesrsquo plane (119909
21199102) is shown in
Figure 5(a) for load119872 swaying time 1199051= 15 s and crane boom
transport slewing angle120593119890= 180
∘ In Figure 5(b) we show theexperimental plot for absolute payload swaying path in theabsolute coordinatesrsquo plane (119909
21199102) for load 119872 swaying time
1199052= 15 s and crane boom transport slewing angle 120593
119890= 180
∘which was built with an introduction of experimental setupin Figure 4
6 Comparison of Derived andKnown Published Results
The computational dimensionless cable force119873119898119892 derivedin the first approximation and shown in Figure 2 outlinesthe minor change of the cable tension force in the vicinityof the ordinate (119873119898119892) = 1 (119873119898119892) isin [09875 10233]
for 119897 = 0206m in Figure 2(a) (119873119898119892) isin [0994 10122]
for 119897 = 0412m in Figure 2(b) (119873119898119892) isin [0998 1004] for119897 = 0618m in Figure 2(c) and (119873119898119892) isin [099933 10013]
for 119897 = 0825m in Figure 2(d) So the assumption (14)really takes place as shown in Figure 2 The same effect for(119873119898119892)Mitrev isin [094 104] has been derived by Mitrev andGrigorov [23 Mitrevrsquos Figure 7 in page 89] that confirmsassumption (14) An analogous effect for dimensionless cable
8 The Scientific World Journal
Camera
Bearing
Boom
Laser pointer
Slewing axis
CableLower plate
M
Light-emitting diodeRegular grid 1200mm times 700mmwith square cells 200mm times 20mm
B
D
O2
Figure 4 The experimental measurement system for payload 119872
swaying during crane boom slewing
force (119873119898119892)Maczynski isin [0996 1005] has been derived byMaczynski and Wojciech [24 Maczynskirsquos Figure 10 in page278] which also reaffirms the assumption (14)
In published work by Sakawa et al ([25] Figure 3 at page552 Figure 4 at page 552 Figure 5 at page 554 and Figure 6at page 554) the small Sakawa values 119889119911119889119905 le 01 (Figures 3and 4) and 119889119911119889119905 le 005 (Figures 5 and 6) of 119911-projectionsfor payload velocities have been shown which confirms thesmall angle assumption119873 asymp 119898119892 (14)
7 Discussion and Analysis of Basic Results forMathematical and Physical Simulation
The relative trajectories for load119872 swaying in Figure 3 showequality of maximum values for relative 119909 and 119910 payloadcoordinates
119909max = 119910max = 1198601+ 1198602=
120596119890(119877 + 119910dyn)
119896 (23)
The formula (23) outlines that values 119909max and 119910max inFigure 3 increase with growth of boom slewing velocity 120596
119890
and with increased cable length 119897 The 119910dyn influence on thevalues of 119909max and 119910max is negligible
Equation (18) shows that the free oscillation frequencies]1and ]
2depend on the boom slewing velocity 120596
119890and
natural frequency 119896 of the payload with a fixed pivot point119861 The frequencies ]
1and ]
2essentially depend on the
pendulum length 119897 because 119896 ≫ 120596119890 Kinematically saying
the miscoordination of frequencies ]1and ]
2is ]1minus ]2=
2120596119890and is determined by the crane boom slewing velocity
120596119890 Dynamically saying the value of miscoordination is
governed by the Coriolis acceleration-induced DrsquoAlembertrsquosinertia force
Computations shown in Figure 3 for relative payload119872 swaying show that the clockwise direction of rotationfor relative oscillations is opposite in direction from thecounterclockwise direction of rotation for the crane boomThis effect follows from the conservation of position of theplane 119910
21199112of oscillations of load 119872 in the fixed inertial
coordinate system 119909211991021199112
The comparative analysis of computational (1) and exper-imental (2) absolute payload trajectories is shown in Fig-ure 5(c)The quantity of the local maximums in Figure 5(a) is8 for theoretical curve 1 So the theoretical period for relativeload swaying is 119879theor = 187 s The quantity of the localmaximums in Figure 5(b) is 75 for experimental curve 2Theperiod for experimental curve 2 in Figure 5(b) is 119879experim =
2 s The discrepancy between the values of theoretical andexperimental periods does not exceed 7
The experimental absolute trajectory (2) in Figures 5(b)and 5(c) outlines the additional relative swaying of payload119872 after crane boom stop which has the elliptical form inthe vicinity of the point (0 minus05) in the plane 119909
21199102for 120593119890=
180∘ The remaining payload motions after crane boom stop
are the small oscillations of the payload with the fixed pivotcenter
8 Final Conclusions
The closed system of nonlinear ODEs for payload relativeswaying has been derived in relative Cartesian coordinateswith an introduction of Lagrange equations and a geometricconstraint equation
The explicit form of the dependence of the cable reactionforce as a function of the relative payload coordinates 119909
1 1199101
1199111and their first and second time derivatives has been found
Derived complex dependency of the cable reaction force onthe abovementioned variables determines the nonlinearity ofthe present problem
The deviation of cable reaction force frompayload gravityforce is small This fact allowed the derivation of a linearizedODE system for payload swaying in relative Cartesian coor-dinates and verified the small relative Cartesian coordinatesrsquoassumption The analytical expressions for relative payloadpath have been derived
Derived results have good agreement with experimentsand known published data
The Scientific World Journal 9
05
04
03
02
01
0
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
t = 15 s
1
Point O2
2R = 1 (m)
1
PointnP i OO2OO
y2 (m)
x2 (m)(Point D)
(Point M)
(a)
05
04
03
02
01
02R = 1 (m)
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
2
4
3
Rotational directionPoint O2
t = 18 s
(Point D)
(Point M)
(Point B)
x2 (m)
y2 (m)
(b)
1 2
4
Point O2
2R = 1 (m)
y2(m)
x2(m)
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
(Point D)
(Point M) (Point M)
05
04
03
02
01
0
(c)
Figure 5 Calculated 1 (a c) and experimental 2 (b c) absolute trajectories for load119872 where 3 is the trajectory of boom point 119861 (b) 4 is thecenter 119874
2(D) of boom rotation (b c)
Disclosure
The submission of the authorsrsquo paper implies that it has notbeen previously published that it is not under considerationfor publication elsewhere and that it will not be publishedelsewhere in the same form without the written permissionof the editors
Conflict of Interests
The authors Alexander V Perig Alexander N Stadnik andAlexander I Deriglazov declare that there is no conflict ofinterests regarding the publication of this paper
References
[1] EMAbdel-Rahman andAHNayfeh ldquoPendulation reductionin boom cranes using cable length manipulationrdquo NonlinearDynamics vol 27 no 3 pp 255ndash269 2002
[2] W Adamiec-Wojcik I P Fałat A Maczynski and S WojciechldquoLoad stabilisation in an A-framemdasha type of an offshore cranerdquoThe Archive of Mechanical Engineering vol 56 no 1 pp 37ndash592009
[3] P J Aston ldquoBifurcations of the horizontally forced sphericalpendulumrdquoMethods in AppliedMechanics and Engineering vol170 no 3-4 pp 343ndash3353 1999
[4] P Betsch M Quasem and S Uhlar ldquoNumerical integration ofdiscretemechanical systems withmixed holonomic and controlconstraintsrdquo Journal of Mechanical Science and Technology vol23 no 4 pp 1012ndash1018 2009
[5] W Blajer and K Kołodziejczyk ldquoA geometric approach tosolving problems of control constraints theory and a DAEframeworkrdquoMultibody System Dynamics vol 11 no 4 pp 343ndash364 2004
[6] W Blajer and K Kołodziejczyk ldquoControl of underactuatedmechanical systems with servo-constraintsrdquoNonlinear Dynam-ics vol 50 no 4 pp 781ndash791 2007
[7] W Blajer and K Kołodziejczyk ldquoModeling of underactuatedmechanical systems in partly specified motionrdquo Journal ofTheoretical and Applied Mechanics vol 46 no 2 pp 383ndash3942008
[8] W Blajer and K Kołodziejczyk ldquoThe use of dependent coor-dinates in modeling and simulation of cranes executing aload prescribed motionrdquo The Archive of Mechanical Engineer-ing vol 3 pp 209ndash222 2009 httpamemeilpweduplindexphpengcontentdownload3731748fileart 2009 3 02pdf
[9] W Blajer A Czaplicki K Dziewiecki and Z Mazur ldquoInfluenceof selected modeling and computational issues on muscle forceestimatesrdquoMultibody System Dynamics vol 24 no 4 pp 473ndash492 2010
[10] W Blajer and K Kołodziejczyk ldquoImproved DAE formulationfor inverse dynamics simulation of cranesrdquo Multibody SystemDynamics vol 25 no 2 pp 131ndash143 2011
10 The Scientific World Journal
[11] J H Cha S H Ham K Y Lee and M I Roh ldquoApplicationof a topological modelling approach of multi-body systemdynamics to simulation of multi-floating cranes in shipyardsrdquoProceedings of the Institution ofMechanical Engineers K vol 224no 4 pp 365ndash373 2010
[12] K Ellermann E Kreuzer and M Markiewicz ldquoNonlineardynamics of floating cranesrdquo Nonlinear Dynamics vol 27 no2 pp 107ndash183 2002
[13] T Erneux and T Kalmar-Nagy ldquoNonlinear stability of a delayedfeedback controlled container cranerdquo Journal of Vibration andControl vol 13 no 5 pp 603ndash616 2007
[14] G Glossiotis and I Antoniadis ldquoPayload sway suppression inrotary cranes by digital filtering of the commanded inputsrdquoProceedings of the Institution of Mechanical Engineers K vol 217no 2 pp 99ndash109 2003
[15] R A Ibrahim ldquoExcitation-induced stability and phase transi-tion a reviewrdquo Journal of Vibration and Control vol 12 no 10pp 1093ndash1170 2006
[16] J Kortelainen and A Mikkola ldquoSemantic data model inmultibody system simulationrdquo Proceedings of the Institution ofMechanical Engineers K vol 224 no 4 pp 341ndash352 2010
[17] R Mitrev ldquoMathematical modelling of translational motion ofrail-guided cart with suspended payloadrdquo Journal of ZhejiangUniversity Science A vol 8 no 9 pp 1395ndash1400 2007
[18] B Grigorov and R Mitrev ldquoA NewtonmdashEuler approach to thefreely suspended load swinging problemrdquo Recent Journal vol10 no 26 pp 109ndash112 2009
[19] MOsinski and SWojciech ldquoApplication of nonlinear optimisa-tion methods to input shaping of the hoist drive of an off-shorecranerdquo Nonlinear Dynamics vol 17 no 4 pp 369ndash386 1998
[20] H L Ren X LWang Y J Hu and C G Li ldquoDynamic responseanalysis of a moored crane-ship with a flexible boomrdquo Journalof Zhejiang University Science A vol 9 no 1 pp 26ndash31 2008
[21] H Schaub ldquoRate-based ship-mounted crane payload pendula-tion control systemrdquo Control Engineering Practice vol 16 no 1pp 132ndash145 2008
[22] N Uchiyama ldquoRobust control for overhead cranes by partialstate feedbackrdquo Proceedings of the Institution of MechanicalEngineers I vol 223 no 4 pp 575ndash580 2009
[23] R Mitrev and B Grigorov ldquoDynamic behaviour of a spheri-cal pendulum with spatially moving pivotrdquo Zeszyty NaukowePolitechniki Poznanskiej Budowa Maszyn i Zarządzanie Pro-dukcją vol 9 pp 81ndash91 2008
[24] A Maczynski and S Wojciech ldquoDynamics of a mobile craneand optimisation of the slewing motion of its upper structurerdquoNonlinear Dynamics vol 32 no 3 pp 259ndash290 2003
[25] Y Sakawa Y Shindo and Y Hashimoto ldquoOptimal control of arotary cranerdquo Journal of Optimization Theory and Applicationsvol 35 no 4 pp 535ndash557 1981
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

The Scientific World Journal 7
t1 = 125 s
y(x) l = 0825 (m) k asymp 3448 (rads) 120596e asymp 0209 (rads)
Relative trajectory of load M swayingfor linearized model
(a)
t2 = 3s
y(x) l = 0825 (m) k asymp 3448 (rads) 120596e asymp 0209 (rads)
Relative trajectory of load M swayingfor linearized model
(b)
t3 = 10 s
y(x) l = 0825 (m) k asymp 3448 (rads) 120596e asymp 0209 (rads)
Relative trajectory of load M swayingfor linearized model
(c)
y(x) l = 0825 (m) k asymp 3448 (rads) 120596e asymp 0209 (rads)
t4 = 25s
Relative trajectory of load M swayingfor linearized model
(d)
Figure 3The relative trajectories for load119872 on the cable during uniform rotational motion of the crane boom 1198611198742for the moments of time
1199051= 125 s (a) 119905
2= 3 s (b) 119905
3= 10 s (c) and 119905
4= 25 s (d)
in the fixed inertial reference frame (1198742119909211991021199112) we will
address the following transition formula
(1199092(119905)
1199102(119905)
) = (sin (120596
119890119905) cos (120596
119890119905)
minus cos (120596119890119905) sin (120596
119890119905)) (
119909 (119905)
119910 (119905) + 119877 + 119910dyn)
(22)
Derived computational plot for absolute payload swayingpath in the absolute coordinatesrsquo plane (119909
21199102) is shown in
Figure 5(a) for load119872 swaying time 1199051= 15 s and crane boom
transport slewing angle120593119890= 180
∘ In Figure 5(b) we show theexperimental plot for absolute payload swaying path in theabsolute coordinatesrsquo plane (119909
21199102) for load 119872 swaying time
1199052= 15 s and crane boom transport slewing angle 120593
119890= 180
∘which was built with an introduction of experimental setupin Figure 4
6 Comparison of Derived andKnown Published Results
The computational dimensionless cable force119873119898119892 derivedin the first approximation and shown in Figure 2 outlinesthe minor change of the cable tension force in the vicinityof the ordinate (119873119898119892) = 1 (119873119898119892) isin [09875 10233]
for 119897 = 0206m in Figure 2(a) (119873119898119892) isin [0994 10122]
for 119897 = 0412m in Figure 2(b) (119873119898119892) isin [0998 1004] for119897 = 0618m in Figure 2(c) and (119873119898119892) isin [099933 10013]
for 119897 = 0825m in Figure 2(d) So the assumption (14)really takes place as shown in Figure 2 The same effect for(119873119898119892)Mitrev isin [094 104] has been derived by Mitrev andGrigorov [23 Mitrevrsquos Figure 7 in page 89] that confirmsassumption (14) An analogous effect for dimensionless cable
8 The Scientific World Journal
Camera
Bearing
Boom
Laser pointer
Slewing axis
CableLower plate
M
Light-emitting diodeRegular grid 1200mm times 700mmwith square cells 200mm times 20mm
B
D
O2
Figure 4 The experimental measurement system for payload 119872
swaying during crane boom slewing
force (119873119898119892)Maczynski isin [0996 1005] has been derived byMaczynski and Wojciech [24 Maczynskirsquos Figure 10 in page278] which also reaffirms the assumption (14)
In published work by Sakawa et al ([25] Figure 3 at page552 Figure 4 at page 552 Figure 5 at page 554 and Figure 6at page 554) the small Sakawa values 119889119911119889119905 le 01 (Figures 3and 4) and 119889119911119889119905 le 005 (Figures 5 and 6) of 119911-projectionsfor payload velocities have been shown which confirms thesmall angle assumption119873 asymp 119898119892 (14)
7 Discussion and Analysis of Basic Results forMathematical and Physical Simulation
The relative trajectories for load119872 swaying in Figure 3 showequality of maximum values for relative 119909 and 119910 payloadcoordinates
119909max = 119910max = 1198601+ 1198602=
120596119890(119877 + 119910dyn)
119896 (23)
The formula (23) outlines that values 119909max and 119910max inFigure 3 increase with growth of boom slewing velocity 120596
119890
and with increased cable length 119897 The 119910dyn influence on thevalues of 119909max and 119910max is negligible
Equation (18) shows that the free oscillation frequencies]1and ]
2depend on the boom slewing velocity 120596
119890and
natural frequency 119896 of the payload with a fixed pivot point119861 The frequencies ]
1and ]
2essentially depend on the
pendulum length 119897 because 119896 ≫ 120596119890 Kinematically saying
the miscoordination of frequencies ]1and ]
2is ]1minus ]2=
2120596119890and is determined by the crane boom slewing velocity
120596119890 Dynamically saying the value of miscoordination is
governed by the Coriolis acceleration-induced DrsquoAlembertrsquosinertia force
Computations shown in Figure 3 for relative payload119872 swaying show that the clockwise direction of rotationfor relative oscillations is opposite in direction from thecounterclockwise direction of rotation for the crane boomThis effect follows from the conservation of position of theplane 119910
21199112of oscillations of load 119872 in the fixed inertial
coordinate system 119909211991021199112
The comparative analysis of computational (1) and exper-imental (2) absolute payload trajectories is shown in Fig-ure 5(c)The quantity of the local maximums in Figure 5(a) is8 for theoretical curve 1 So the theoretical period for relativeload swaying is 119879theor = 187 s The quantity of the localmaximums in Figure 5(b) is 75 for experimental curve 2Theperiod for experimental curve 2 in Figure 5(b) is 119879experim =
2 s The discrepancy between the values of theoretical andexperimental periods does not exceed 7
The experimental absolute trajectory (2) in Figures 5(b)and 5(c) outlines the additional relative swaying of payload119872 after crane boom stop which has the elliptical form inthe vicinity of the point (0 minus05) in the plane 119909
21199102for 120593119890=
180∘ The remaining payload motions after crane boom stop
are the small oscillations of the payload with the fixed pivotcenter
8 Final Conclusions
The closed system of nonlinear ODEs for payload relativeswaying has been derived in relative Cartesian coordinateswith an introduction of Lagrange equations and a geometricconstraint equation
The explicit form of the dependence of the cable reactionforce as a function of the relative payload coordinates 119909
1 1199101
1199111and their first and second time derivatives has been found
Derived complex dependency of the cable reaction force onthe abovementioned variables determines the nonlinearity ofthe present problem
The deviation of cable reaction force frompayload gravityforce is small This fact allowed the derivation of a linearizedODE system for payload swaying in relative Cartesian coor-dinates and verified the small relative Cartesian coordinatesrsquoassumption The analytical expressions for relative payloadpath have been derived
Derived results have good agreement with experimentsand known published data
The Scientific World Journal 9
05
04
03
02
01
0
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
t = 15 s
1
Point O2
2R = 1 (m)
1
PointnP i OO2OO
y2 (m)
x2 (m)(Point D)
(Point M)
(a)
05
04
03
02
01
02R = 1 (m)
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
2
4
3
Rotational directionPoint O2
t = 18 s
(Point D)
(Point M)
(Point B)
x2 (m)
y2 (m)
(b)
1 2
4
Point O2
2R = 1 (m)
y2(m)
x2(m)
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
(Point D)
(Point M) (Point M)
05
04
03
02
01
0
(c)
Figure 5 Calculated 1 (a c) and experimental 2 (b c) absolute trajectories for load119872 where 3 is the trajectory of boom point 119861 (b) 4 is thecenter 119874
2(D) of boom rotation (b c)
Disclosure
The submission of the authorsrsquo paper implies that it has notbeen previously published that it is not under considerationfor publication elsewhere and that it will not be publishedelsewhere in the same form without the written permissionof the editors
Conflict of Interests
The authors Alexander V Perig Alexander N Stadnik andAlexander I Deriglazov declare that there is no conflict ofinterests regarding the publication of this paper
References
[1] EMAbdel-Rahman andAHNayfeh ldquoPendulation reductionin boom cranes using cable length manipulationrdquo NonlinearDynamics vol 27 no 3 pp 255ndash269 2002
[2] W Adamiec-Wojcik I P Fałat A Maczynski and S WojciechldquoLoad stabilisation in an A-framemdasha type of an offshore cranerdquoThe Archive of Mechanical Engineering vol 56 no 1 pp 37ndash592009
[3] P J Aston ldquoBifurcations of the horizontally forced sphericalpendulumrdquoMethods in AppliedMechanics and Engineering vol170 no 3-4 pp 343ndash3353 1999
[4] P Betsch M Quasem and S Uhlar ldquoNumerical integration ofdiscretemechanical systems withmixed holonomic and controlconstraintsrdquo Journal of Mechanical Science and Technology vol23 no 4 pp 1012ndash1018 2009
[5] W Blajer and K Kołodziejczyk ldquoA geometric approach tosolving problems of control constraints theory and a DAEframeworkrdquoMultibody System Dynamics vol 11 no 4 pp 343ndash364 2004
[6] W Blajer and K Kołodziejczyk ldquoControl of underactuatedmechanical systems with servo-constraintsrdquoNonlinear Dynam-ics vol 50 no 4 pp 781ndash791 2007
[7] W Blajer and K Kołodziejczyk ldquoModeling of underactuatedmechanical systems in partly specified motionrdquo Journal ofTheoretical and Applied Mechanics vol 46 no 2 pp 383ndash3942008
[8] W Blajer and K Kołodziejczyk ldquoThe use of dependent coor-dinates in modeling and simulation of cranes executing aload prescribed motionrdquo The Archive of Mechanical Engineer-ing vol 3 pp 209ndash222 2009 httpamemeilpweduplindexphpengcontentdownload3731748fileart 2009 3 02pdf
[9] W Blajer A Czaplicki K Dziewiecki and Z Mazur ldquoInfluenceof selected modeling and computational issues on muscle forceestimatesrdquoMultibody System Dynamics vol 24 no 4 pp 473ndash492 2010
[10] W Blajer and K Kołodziejczyk ldquoImproved DAE formulationfor inverse dynamics simulation of cranesrdquo Multibody SystemDynamics vol 25 no 2 pp 131ndash143 2011
10 The Scientific World Journal
[11] J H Cha S H Ham K Y Lee and M I Roh ldquoApplicationof a topological modelling approach of multi-body systemdynamics to simulation of multi-floating cranes in shipyardsrdquoProceedings of the Institution ofMechanical Engineers K vol 224no 4 pp 365ndash373 2010
[12] K Ellermann E Kreuzer and M Markiewicz ldquoNonlineardynamics of floating cranesrdquo Nonlinear Dynamics vol 27 no2 pp 107ndash183 2002
[13] T Erneux and T Kalmar-Nagy ldquoNonlinear stability of a delayedfeedback controlled container cranerdquo Journal of Vibration andControl vol 13 no 5 pp 603ndash616 2007
[14] G Glossiotis and I Antoniadis ldquoPayload sway suppression inrotary cranes by digital filtering of the commanded inputsrdquoProceedings of the Institution of Mechanical Engineers K vol 217no 2 pp 99ndash109 2003
[15] R A Ibrahim ldquoExcitation-induced stability and phase transi-tion a reviewrdquo Journal of Vibration and Control vol 12 no 10pp 1093ndash1170 2006
[16] J Kortelainen and A Mikkola ldquoSemantic data model inmultibody system simulationrdquo Proceedings of the Institution ofMechanical Engineers K vol 224 no 4 pp 341ndash352 2010
[17] R Mitrev ldquoMathematical modelling of translational motion ofrail-guided cart with suspended payloadrdquo Journal of ZhejiangUniversity Science A vol 8 no 9 pp 1395ndash1400 2007
[18] B Grigorov and R Mitrev ldquoA NewtonmdashEuler approach to thefreely suspended load swinging problemrdquo Recent Journal vol10 no 26 pp 109ndash112 2009
[19] MOsinski and SWojciech ldquoApplication of nonlinear optimisa-tion methods to input shaping of the hoist drive of an off-shorecranerdquo Nonlinear Dynamics vol 17 no 4 pp 369ndash386 1998
[20] H L Ren X LWang Y J Hu and C G Li ldquoDynamic responseanalysis of a moored crane-ship with a flexible boomrdquo Journalof Zhejiang University Science A vol 9 no 1 pp 26ndash31 2008
[21] H Schaub ldquoRate-based ship-mounted crane payload pendula-tion control systemrdquo Control Engineering Practice vol 16 no 1pp 132ndash145 2008
[22] N Uchiyama ldquoRobust control for overhead cranes by partialstate feedbackrdquo Proceedings of the Institution of MechanicalEngineers I vol 223 no 4 pp 575ndash580 2009
[23] R Mitrev and B Grigorov ldquoDynamic behaviour of a spheri-cal pendulum with spatially moving pivotrdquo Zeszyty NaukowePolitechniki Poznanskiej Budowa Maszyn i Zarządzanie Pro-dukcją vol 9 pp 81ndash91 2008
[24] A Maczynski and S Wojciech ldquoDynamics of a mobile craneand optimisation of the slewing motion of its upper structurerdquoNonlinear Dynamics vol 32 no 3 pp 259ndash290 2003
[25] Y Sakawa Y Shindo and Y Hashimoto ldquoOptimal control of arotary cranerdquo Journal of Optimization Theory and Applicationsvol 35 no 4 pp 535ndash557 1981
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

8 The Scientific World Journal
Camera
Bearing
Boom
Laser pointer
Slewing axis
CableLower plate
M
Light-emitting diodeRegular grid 1200mm times 700mmwith square cells 200mm times 20mm
B
D
O2
Figure 4 The experimental measurement system for payload 119872
swaying during crane boom slewing
force (119873119898119892)Maczynski isin [0996 1005] has been derived byMaczynski and Wojciech [24 Maczynskirsquos Figure 10 in page278] which also reaffirms the assumption (14)
In published work by Sakawa et al ([25] Figure 3 at page552 Figure 4 at page 552 Figure 5 at page 554 and Figure 6at page 554) the small Sakawa values 119889119911119889119905 le 01 (Figures 3and 4) and 119889119911119889119905 le 005 (Figures 5 and 6) of 119911-projectionsfor payload velocities have been shown which confirms thesmall angle assumption119873 asymp 119898119892 (14)
7 Discussion and Analysis of Basic Results forMathematical and Physical Simulation
The relative trajectories for load119872 swaying in Figure 3 showequality of maximum values for relative 119909 and 119910 payloadcoordinates
119909max = 119910max = 1198601+ 1198602=
120596119890(119877 + 119910dyn)
119896 (23)
The formula (23) outlines that values 119909max and 119910max inFigure 3 increase with growth of boom slewing velocity 120596
119890
and with increased cable length 119897 The 119910dyn influence on thevalues of 119909max and 119910max is negligible
Equation (18) shows that the free oscillation frequencies]1and ]
2depend on the boom slewing velocity 120596
119890and
natural frequency 119896 of the payload with a fixed pivot point119861 The frequencies ]
1and ]
2essentially depend on the
pendulum length 119897 because 119896 ≫ 120596119890 Kinematically saying
the miscoordination of frequencies ]1and ]
2is ]1minus ]2=
2120596119890and is determined by the crane boom slewing velocity
120596119890 Dynamically saying the value of miscoordination is
governed by the Coriolis acceleration-induced DrsquoAlembertrsquosinertia force
Computations shown in Figure 3 for relative payload119872 swaying show that the clockwise direction of rotationfor relative oscillations is opposite in direction from thecounterclockwise direction of rotation for the crane boomThis effect follows from the conservation of position of theplane 119910
21199112of oscillations of load 119872 in the fixed inertial
coordinate system 119909211991021199112
The comparative analysis of computational (1) and exper-imental (2) absolute payload trajectories is shown in Fig-ure 5(c)The quantity of the local maximums in Figure 5(a) is8 for theoretical curve 1 So the theoretical period for relativeload swaying is 119879theor = 187 s The quantity of the localmaximums in Figure 5(b) is 75 for experimental curve 2Theperiod for experimental curve 2 in Figure 5(b) is 119879experim =
2 s The discrepancy between the values of theoretical andexperimental periods does not exceed 7
The experimental absolute trajectory (2) in Figures 5(b)and 5(c) outlines the additional relative swaying of payload119872 after crane boom stop which has the elliptical form inthe vicinity of the point (0 minus05) in the plane 119909
21199102for 120593119890=
180∘ The remaining payload motions after crane boom stop
are the small oscillations of the payload with the fixed pivotcenter
8 Final Conclusions
The closed system of nonlinear ODEs for payload relativeswaying has been derived in relative Cartesian coordinateswith an introduction of Lagrange equations and a geometricconstraint equation
The explicit form of the dependence of the cable reactionforce as a function of the relative payload coordinates 119909
1 1199101
1199111and their first and second time derivatives has been found
Derived complex dependency of the cable reaction force onthe abovementioned variables determines the nonlinearity ofthe present problem
The deviation of cable reaction force frompayload gravityforce is small This fact allowed the derivation of a linearizedODE system for payload swaying in relative Cartesian coor-dinates and verified the small relative Cartesian coordinatesrsquoassumption The analytical expressions for relative payloadpath have been derived
Derived results have good agreement with experimentsand known published data
The Scientific World Journal 9
05
04
03
02
01
0
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
t = 15 s
1
Point O2
2R = 1 (m)
1
PointnP i OO2OO
y2 (m)
x2 (m)(Point D)
(Point M)
(a)
05
04
03
02
01
02R = 1 (m)
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
2
4
3
Rotational directionPoint O2
t = 18 s
(Point D)
(Point M)
(Point B)
x2 (m)
y2 (m)
(b)
1 2
4
Point O2
2R = 1 (m)
y2(m)
x2(m)
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
(Point D)
(Point M) (Point M)
05
04
03
02
01
0
(c)
Figure 5 Calculated 1 (a c) and experimental 2 (b c) absolute trajectories for load119872 where 3 is the trajectory of boom point 119861 (b) 4 is thecenter 119874
2(D) of boom rotation (b c)
Disclosure
The submission of the authorsrsquo paper implies that it has notbeen previously published that it is not under considerationfor publication elsewhere and that it will not be publishedelsewhere in the same form without the written permissionof the editors
Conflict of Interests
The authors Alexander V Perig Alexander N Stadnik andAlexander I Deriglazov declare that there is no conflict ofinterests regarding the publication of this paper
References
[1] EMAbdel-Rahman andAHNayfeh ldquoPendulation reductionin boom cranes using cable length manipulationrdquo NonlinearDynamics vol 27 no 3 pp 255ndash269 2002
[2] W Adamiec-Wojcik I P Fałat A Maczynski and S WojciechldquoLoad stabilisation in an A-framemdasha type of an offshore cranerdquoThe Archive of Mechanical Engineering vol 56 no 1 pp 37ndash592009
[3] P J Aston ldquoBifurcations of the horizontally forced sphericalpendulumrdquoMethods in AppliedMechanics and Engineering vol170 no 3-4 pp 343ndash3353 1999
[4] P Betsch M Quasem and S Uhlar ldquoNumerical integration ofdiscretemechanical systems withmixed holonomic and controlconstraintsrdquo Journal of Mechanical Science and Technology vol23 no 4 pp 1012ndash1018 2009
[5] W Blajer and K Kołodziejczyk ldquoA geometric approach tosolving problems of control constraints theory and a DAEframeworkrdquoMultibody System Dynamics vol 11 no 4 pp 343ndash364 2004
[6] W Blajer and K Kołodziejczyk ldquoControl of underactuatedmechanical systems with servo-constraintsrdquoNonlinear Dynam-ics vol 50 no 4 pp 781ndash791 2007
[7] W Blajer and K Kołodziejczyk ldquoModeling of underactuatedmechanical systems in partly specified motionrdquo Journal ofTheoretical and Applied Mechanics vol 46 no 2 pp 383ndash3942008
[8] W Blajer and K Kołodziejczyk ldquoThe use of dependent coor-dinates in modeling and simulation of cranes executing aload prescribed motionrdquo The Archive of Mechanical Engineer-ing vol 3 pp 209ndash222 2009 httpamemeilpweduplindexphpengcontentdownload3731748fileart 2009 3 02pdf
[9] W Blajer A Czaplicki K Dziewiecki and Z Mazur ldquoInfluenceof selected modeling and computational issues on muscle forceestimatesrdquoMultibody System Dynamics vol 24 no 4 pp 473ndash492 2010
[10] W Blajer and K Kołodziejczyk ldquoImproved DAE formulationfor inverse dynamics simulation of cranesrdquo Multibody SystemDynamics vol 25 no 2 pp 131ndash143 2011
10 The Scientific World Journal
[11] J H Cha S H Ham K Y Lee and M I Roh ldquoApplicationof a topological modelling approach of multi-body systemdynamics to simulation of multi-floating cranes in shipyardsrdquoProceedings of the Institution ofMechanical Engineers K vol 224no 4 pp 365ndash373 2010
[12] K Ellermann E Kreuzer and M Markiewicz ldquoNonlineardynamics of floating cranesrdquo Nonlinear Dynamics vol 27 no2 pp 107ndash183 2002
[13] T Erneux and T Kalmar-Nagy ldquoNonlinear stability of a delayedfeedback controlled container cranerdquo Journal of Vibration andControl vol 13 no 5 pp 603ndash616 2007
[14] G Glossiotis and I Antoniadis ldquoPayload sway suppression inrotary cranes by digital filtering of the commanded inputsrdquoProceedings of the Institution of Mechanical Engineers K vol 217no 2 pp 99ndash109 2003
[15] R A Ibrahim ldquoExcitation-induced stability and phase transi-tion a reviewrdquo Journal of Vibration and Control vol 12 no 10pp 1093ndash1170 2006
[16] J Kortelainen and A Mikkola ldquoSemantic data model inmultibody system simulationrdquo Proceedings of the Institution ofMechanical Engineers K vol 224 no 4 pp 341ndash352 2010
[17] R Mitrev ldquoMathematical modelling of translational motion ofrail-guided cart with suspended payloadrdquo Journal of ZhejiangUniversity Science A vol 8 no 9 pp 1395ndash1400 2007
[18] B Grigorov and R Mitrev ldquoA NewtonmdashEuler approach to thefreely suspended load swinging problemrdquo Recent Journal vol10 no 26 pp 109ndash112 2009
[19] MOsinski and SWojciech ldquoApplication of nonlinear optimisa-tion methods to input shaping of the hoist drive of an off-shorecranerdquo Nonlinear Dynamics vol 17 no 4 pp 369ndash386 1998
[20] H L Ren X LWang Y J Hu and C G Li ldquoDynamic responseanalysis of a moored crane-ship with a flexible boomrdquo Journalof Zhejiang University Science A vol 9 no 1 pp 26ndash31 2008
[21] H Schaub ldquoRate-based ship-mounted crane payload pendula-tion control systemrdquo Control Engineering Practice vol 16 no 1pp 132ndash145 2008
[22] N Uchiyama ldquoRobust control for overhead cranes by partialstate feedbackrdquo Proceedings of the Institution of MechanicalEngineers I vol 223 no 4 pp 575ndash580 2009
[23] R Mitrev and B Grigorov ldquoDynamic behaviour of a spheri-cal pendulum with spatially moving pivotrdquo Zeszyty NaukowePolitechniki Poznanskiej Budowa Maszyn i Zarządzanie Pro-dukcją vol 9 pp 81ndash91 2008
[24] A Maczynski and S Wojciech ldquoDynamics of a mobile craneand optimisation of the slewing motion of its upper structurerdquoNonlinear Dynamics vol 32 no 3 pp 259ndash290 2003
[25] Y Sakawa Y Shindo and Y Hashimoto ldquoOptimal control of arotary cranerdquo Journal of Optimization Theory and Applicationsvol 35 no 4 pp 535ndash557 1981
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

The Scientific World Journal 9
05
04
03
02
01
0
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
t = 15 s
1
Point O2
2R = 1 (m)
1
PointnP i OO2OO
y2 (m)
x2 (m)(Point D)
(Point M)
(a)
05
04
03
02
01
02R = 1 (m)
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
2
4
3
Rotational directionPoint O2
t = 18 s
(Point D)
(Point M)
(Point B)
x2 (m)
y2 (m)
(b)
1 2
4
Point O2
2R = 1 (m)
y2(m)
x2(m)
minus05 minus04 minus03 minus02 minus01 0 01 02 03 04 05
(Point D)
(Point M) (Point M)
05
04
03
02
01
0
(c)
Figure 5 Calculated 1 (a c) and experimental 2 (b c) absolute trajectories for load119872 where 3 is the trajectory of boom point 119861 (b) 4 is thecenter 119874
2(D) of boom rotation (b c)
Disclosure
The submission of the authorsrsquo paper implies that it has notbeen previously published that it is not under considerationfor publication elsewhere and that it will not be publishedelsewhere in the same form without the written permissionof the editors
Conflict of Interests
The authors Alexander V Perig Alexander N Stadnik andAlexander I Deriglazov declare that there is no conflict ofinterests regarding the publication of this paper
References
[1] EMAbdel-Rahman andAHNayfeh ldquoPendulation reductionin boom cranes using cable length manipulationrdquo NonlinearDynamics vol 27 no 3 pp 255ndash269 2002
[2] W Adamiec-Wojcik I P Fałat A Maczynski and S WojciechldquoLoad stabilisation in an A-framemdasha type of an offshore cranerdquoThe Archive of Mechanical Engineering vol 56 no 1 pp 37ndash592009
[3] P J Aston ldquoBifurcations of the horizontally forced sphericalpendulumrdquoMethods in AppliedMechanics and Engineering vol170 no 3-4 pp 343ndash3353 1999
[4] P Betsch M Quasem and S Uhlar ldquoNumerical integration ofdiscretemechanical systems withmixed holonomic and controlconstraintsrdquo Journal of Mechanical Science and Technology vol23 no 4 pp 1012ndash1018 2009
[5] W Blajer and K Kołodziejczyk ldquoA geometric approach tosolving problems of control constraints theory and a DAEframeworkrdquoMultibody System Dynamics vol 11 no 4 pp 343ndash364 2004
[6] W Blajer and K Kołodziejczyk ldquoControl of underactuatedmechanical systems with servo-constraintsrdquoNonlinear Dynam-ics vol 50 no 4 pp 781ndash791 2007
[7] W Blajer and K Kołodziejczyk ldquoModeling of underactuatedmechanical systems in partly specified motionrdquo Journal ofTheoretical and Applied Mechanics vol 46 no 2 pp 383ndash3942008
[8] W Blajer and K Kołodziejczyk ldquoThe use of dependent coor-dinates in modeling and simulation of cranes executing aload prescribed motionrdquo The Archive of Mechanical Engineer-ing vol 3 pp 209ndash222 2009 httpamemeilpweduplindexphpengcontentdownload3731748fileart 2009 3 02pdf
[9] W Blajer A Czaplicki K Dziewiecki and Z Mazur ldquoInfluenceof selected modeling and computational issues on muscle forceestimatesrdquoMultibody System Dynamics vol 24 no 4 pp 473ndash492 2010
[10] W Blajer and K Kołodziejczyk ldquoImproved DAE formulationfor inverse dynamics simulation of cranesrdquo Multibody SystemDynamics vol 25 no 2 pp 131ndash143 2011
10 The Scientific World Journal
[11] J H Cha S H Ham K Y Lee and M I Roh ldquoApplicationof a topological modelling approach of multi-body systemdynamics to simulation of multi-floating cranes in shipyardsrdquoProceedings of the Institution ofMechanical Engineers K vol 224no 4 pp 365ndash373 2010
[12] K Ellermann E Kreuzer and M Markiewicz ldquoNonlineardynamics of floating cranesrdquo Nonlinear Dynamics vol 27 no2 pp 107ndash183 2002
[13] T Erneux and T Kalmar-Nagy ldquoNonlinear stability of a delayedfeedback controlled container cranerdquo Journal of Vibration andControl vol 13 no 5 pp 603ndash616 2007
[14] G Glossiotis and I Antoniadis ldquoPayload sway suppression inrotary cranes by digital filtering of the commanded inputsrdquoProceedings of the Institution of Mechanical Engineers K vol 217no 2 pp 99ndash109 2003
[15] R A Ibrahim ldquoExcitation-induced stability and phase transi-tion a reviewrdquo Journal of Vibration and Control vol 12 no 10pp 1093ndash1170 2006
[16] J Kortelainen and A Mikkola ldquoSemantic data model inmultibody system simulationrdquo Proceedings of the Institution ofMechanical Engineers K vol 224 no 4 pp 341ndash352 2010
[17] R Mitrev ldquoMathematical modelling of translational motion ofrail-guided cart with suspended payloadrdquo Journal of ZhejiangUniversity Science A vol 8 no 9 pp 1395ndash1400 2007
[18] B Grigorov and R Mitrev ldquoA NewtonmdashEuler approach to thefreely suspended load swinging problemrdquo Recent Journal vol10 no 26 pp 109ndash112 2009
[19] MOsinski and SWojciech ldquoApplication of nonlinear optimisa-tion methods to input shaping of the hoist drive of an off-shorecranerdquo Nonlinear Dynamics vol 17 no 4 pp 369ndash386 1998
[20] H L Ren X LWang Y J Hu and C G Li ldquoDynamic responseanalysis of a moored crane-ship with a flexible boomrdquo Journalof Zhejiang University Science A vol 9 no 1 pp 26ndash31 2008
[21] H Schaub ldquoRate-based ship-mounted crane payload pendula-tion control systemrdquo Control Engineering Practice vol 16 no 1pp 132ndash145 2008
[22] N Uchiyama ldquoRobust control for overhead cranes by partialstate feedbackrdquo Proceedings of the Institution of MechanicalEngineers I vol 223 no 4 pp 575ndash580 2009
[23] R Mitrev and B Grigorov ldquoDynamic behaviour of a spheri-cal pendulum with spatially moving pivotrdquo Zeszyty NaukowePolitechniki Poznanskiej Budowa Maszyn i Zarządzanie Pro-dukcją vol 9 pp 81ndash91 2008
[24] A Maczynski and S Wojciech ldquoDynamics of a mobile craneand optimisation of the slewing motion of its upper structurerdquoNonlinear Dynamics vol 32 no 3 pp 259ndash290 2003
[25] Y Sakawa Y Shindo and Y Hashimoto ldquoOptimal control of arotary cranerdquo Journal of Optimization Theory and Applicationsvol 35 no 4 pp 535ndash557 1981
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

10 The Scientific World Journal
[11] J H Cha S H Ham K Y Lee and M I Roh ldquoApplicationof a topological modelling approach of multi-body systemdynamics to simulation of multi-floating cranes in shipyardsrdquoProceedings of the Institution ofMechanical Engineers K vol 224no 4 pp 365ndash373 2010
[12] K Ellermann E Kreuzer and M Markiewicz ldquoNonlineardynamics of floating cranesrdquo Nonlinear Dynamics vol 27 no2 pp 107ndash183 2002
[13] T Erneux and T Kalmar-Nagy ldquoNonlinear stability of a delayedfeedback controlled container cranerdquo Journal of Vibration andControl vol 13 no 5 pp 603ndash616 2007
[14] G Glossiotis and I Antoniadis ldquoPayload sway suppression inrotary cranes by digital filtering of the commanded inputsrdquoProceedings of the Institution of Mechanical Engineers K vol 217no 2 pp 99ndash109 2003
[15] R A Ibrahim ldquoExcitation-induced stability and phase transi-tion a reviewrdquo Journal of Vibration and Control vol 12 no 10pp 1093ndash1170 2006
[16] J Kortelainen and A Mikkola ldquoSemantic data model inmultibody system simulationrdquo Proceedings of the Institution ofMechanical Engineers K vol 224 no 4 pp 341ndash352 2010
[17] R Mitrev ldquoMathematical modelling of translational motion ofrail-guided cart with suspended payloadrdquo Journal of ZhejiangUniversity Science A vol 8 no 9 pp 1395ndash1400 2007
[18] B Grigorov and R Mitrev ldquoA NewtonmdashEuler approach to thefreely suspended load swinging problemrdquo Recent Journal vol10 no 26 pp 109ndash112 2009
[19] MOsinski and SWojciech ldquoApplication of nonlinear optimisa-tion methods to input shaping of the hoist drive of an off-shorecranerdquo Nonlinear Dynamics vol 17 no 4 pp 369ndash386 1998
[20] H L Ren X LWang Y J Hu and C G Li ldquoDynamic responseanalysis of a moored crane-ship with a flexible boomrdquo Journalof Zhejiang University Science A vol 9 no 1 pp 26ndash31 2008
[21] H Schaub ldquoRate-based ship-mounted crane payload pendula-tion control systemrdquo Control Engineering Practice vol 16 no 1pp 132ndash145 2008
[22] N Uchiyama ldquoRobust control for overhead cranes by partialstate feedbackrdquo Proceedings of the Institution of MechanicalEngineers I vol 223 no 4 pp 575ndash580 2009
[23] R Mitrev and B Grigorov ldquoDynamic behaviour of a spheri-cal pendulum with spatially moving pivotrdquo Zeszyty NaukowePolitechniki Poznanskiej Budowa Maszyn i Zarządzanie Pro-dukcją vol 9 pp 81ndash91 2008
[24] A Maczynski and S Wojciech ldquoDynamics of a mobile craneand optimisation of the slewing motion of its upper structurerdquoNonlinear Dynamics vol 32 no 3 pp 259ndash290 2003
[25] Y Sakawa Y Shindo and Y Hashimoto ldquoOptimal control of arotary cranerdquo Journal of Optimization Theory and Applicationsvol 35 no 4 pp 535ndash557 1981
International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of

International Journal of
AerospaceEngineeringHindawi Publishing Corporationhttpwwwhindawicom Volume 2014
RoboticsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Active and Passive Electronic Components
Control Scienceand Engineering
Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
International Journal of
RotatingMachinery
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporation httpwwwhindawicom
Journal ofEngineeringVolume 2014
Submit your manuscripts athttpwwwhindawicom
VLSI Design
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Shock and Vibration
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Civil EngineeringAdvances in
Acoustics and VibrationAdvances in
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Electrical and Computer Engineering
Journal of
Advances inOptoElectronics
Hindawi Publishing Corporation httpwwwhindawicom
Volume 2014
The Scientific World JournalHindawi Publishing Corporation httpwwwhindawicom Volume 2014
SensorsJournal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Modelling amp Simulation in EngineeringHindawi Publishing Corporation httpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Chemical EngineeringInternational Journal of Antennas and
Propagation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
Navigation and Observation
International Journal of
Hindawi Publishing Corporationhttpwwwhindawicom Volume 2014
DistributedSensor Networks
International Journal of






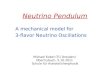


![L 21 – Vibration and Waves [ 2 ] Vibrations (oscillations) –resonance –pendulum –springs –harmonic motion Waves –mechanical waves –sound waves –musical](https://img.pdfslide.net/doc/110x75/56649cb95503460f949807a1/l-21-vibration-and-waves-2-vibrations-oscillations-resonance-pendulum.jpg)