Embed Size (px)
Citation preview
Hindawi Publishing CorporationMathematical Problems in EngineeringVolume 2013, Article ID 678943, 8 pageshttp://dx.doi.org/10.1155/2013/678943
Research ArticleStudy on GPS/INS System Using Novel Filtering Methods forVessel Attitude Determination
Xiyuan Chen, Chong Shen, and Yuefang Zhao
Key Laboratory of Micro-Inertial Instrument and Advanced Navigation Technology, Ministry of Education and School ofInstrument Science and Engineering, Southeast University, Nanjing 210096, China
Correspondence should be addressed to Xiyuan Chen; [email protected]
Received 22 February 2013; Accepted 26 March 2013
Academic Editor: Henryk Sniegocki
Copyright © 2013 Xiyuan Chen et al. This is an open access article distributed under the Creative Commons Attribution License,which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
Any vehicle such as vessel has three attitude parameters, which are mostly defined as pitch, roll, and heading from true north. Inhydrographic surveying, determination of these parameters by using GPS or INS technologies is essential for the requirements ofvehicle measurements. Recently, integration of GPS/INS by using data fusion algorithm becamemore andmore popular.Therefore,the data fusion algorithmplays an important role in vehicle attitude determination. To improve attitude determination accuracy andefficiency, two improved data fusion algorithms are presented, which are extendedKalman particle filter (EKPF) and genetic particlefilter (GPF). EKPF algorithm combines particle filter (PF) with the extended Kalman filter (EKF) to avoid sample impoverishmentduring the resampling process. GPF is based on genetic algorithm and PF; several genetic operators such as selection, crossover,and mutation are adopted to optimize the resampling process of PF, which can not only reduce the particle impoverishment butalso improve the computation efficiency. The performances of the system based on the two proposed algorithms are analyzedand compared with traditional KF. Simulation results show that, comprehensively considering the determination accuracy andconsumption cost, the performance of the proposed GPF is better than EKPF and traditional KF.
1. Introduction
It is very important to provide accurate and reliable attitudedetermination data since the performance of a vessel is highlyreliant on the attitude determination system [1]. Due to theircomplementary features of global positioning system (GPS)and inertial navigation system (INS), the GPS/INS integratednavigation systems have been extensively investigated andincreasingly used for highly accurate attitude determination[2], especially in position and orientation systems [3]. TheGPS/INS integrated systems can be classified into looselycoupled, tightly coupled, and ultratightly coupled systems[4]. Due to the high cost and complexity of tightly-coupledand ultra-tightly-coupled systems, most GPS/INS systemsare loosely-coupled because they are easier to build [5].Therefore, loosely-coupled GPS/INS is employed in ourstudy. The block diagram of loosely-coupled GPS/INS isshown in Figure 1.
In the process of attitude determination, filtering methodperforms a very important role to achieve high accuracy
determination results with high efficiency [6–8]. Kalmanfilter (KF) [9–13] is a popular data fusion algorithm inhandling optimal estimation problemswhich has beenwidelyinvestigated in vehicle positioning or attitude determinationfor a long time.However, the optimality of KF highly dependson the data linearity. The first solution to the estimationof nonlinear system is extended Kalman filter (EKF) [14–17]. The EKF is based on approximation to the first-orderlinearization of the nonlinear process or observation equa-tions, so large errors can be introduced which make EKFalgorithm no longer effective in many special applications,such as the complex systems environments which demandhigher estimation accuracy. Recently, unscented Kalmanfilter (UKF) [18, 19] and particle filter (PF) [20–22] arepresented through improvement and innovation. Comparedwith traditional filtering algorithms, PF is more suitablefor non-Gaussian and nonlinear systems. However, becauseof the so-called sample impoverishment phenomenon, theimplementation complexity of PF is prohibitively high with

2 Mathematical Problems in Engineering
INS Filter
GPS
Errorcalibration
Antenna Position, velocity, attitude
Position, velocity
Navigationinformation
Estimated error
Figure 1: Block diagram of loosely-coupled GPS/INS system.
limited computing resources, especially for dynamical sys-tems. So the improvement of PF has been concerned bymany scholars for a long time. ExtendedKalmanparticle filter(EKPF) [23], which uses EKF to determine the importancedensity, has been proposed to improve the performance ofPF. In addition, with the development of simulated annealingalgorithm, genetic algorithm [24], particle swarm optimiza-tion [25], and some other intelligent evolutionary algorithms
[26] have been used to improve the diversity of particlegroups for accessing to the global optimum estimation,and certain effects have been reached indeed through theimprovements above.
The major contributions of this paper are in investigatingthe EKPF and genetic particle filter (GPF) and using themto improve not only the accuracy of GPS/INS attitude deter-mination but also the computation efficiency.The simulationresults show that, compared with traditional KF, more highlyaccurate attitude determination results can be reached byusing EKPF. The comparison results between EKPF andGPF show that GPF has higher filtering accuracy and moreefficient computation ability than EKPF.
2. System Model and Data Collection
2.1. System Model. The state model for KF is presented as
𝑋 (𝑡) = 𝐹 (𝑡)𝑋 (𝑡) + 𝐺 (𝑡)𝑊 (𝑡) , (1)
where 𝑋 denotes state variables, 𝑊 denotes system noise, 𝐹denotes system matrix, and 𝐺 denotes system noise matrix.The state vector is parameters errors with 15 dimensions:
𝑋 = [𝛿𝐿 𝛿𝜆 𝛿ℎ 𝛿𝑉
𝐸𝛿𝑉
𝑁𝛿𝑉
𝑈𝜙
𝐸𝜙
𝑁𝜙
𝑈∇
𝑏𝑥∇
𝑏𝑦∇
𝑏𝑧𝜀
𝑏𝑥𝜀
𝑏𝑦𝜀
𝑏𝑧] , (2)
where, 𝛿𝐿, 𝛿𝜆, 𝛿ℎ, 𝛿𝑉𝐸, 𝛿𝑉𝑁, 𝛿𝑉𝑈, 𝜙𝐸, 𝜙𝑁, 𝜙𝑈are, respectively,
the 3-dimension position errors, velocity errors and attitudeerrors of INS system. The 9 parameters mentioned aboveare estimated by filter, then the determination accuracycan be calibrated by the compensation of the 9 estimatedparameters, and the measurement accuracy can be improved
after calibrating. ∇𝑏𝑥, ∇𝑏𝑦, ∇𝑏𝑧, 𝜀𝑏𝑥, 𝜀𝑏𝑦, 𝜀𝑏𝑧
are, respectively,the 3-dimension errors of accelerometers and gyros. The 6parameters mentioned above are determined by experienceor device introduction, and the accuracy of GPS/INS systemcan be improved by putting the 6 parameters into the statevector. The system noise matrix is
𝑊 = [𝑤
𝐿𝑤
𝜆𝑤
ℎ𝑤
𝑉𝐸𝑤
𝑉𝑁𝑤
𝑉𝑈𝑤
𝜙𝐸𝑤
𝜙𝑁𝑤
𝜙𝑈0 0 0 0 0 0
] , (3)
where 𝑤
𝐿, 𝑤
𝜆, 𝑤
ℎ, 𝑤
𝑉𝐸, 𝑤
𝑉𝑁, 𝑤
𝑉𝑈, 𝑤
𝜙𝐸, 𝑤
𝜙𝑁, 𝑤
𝜙𝑈are,
respectively, the stochastic noise of 3-dimension position,velocity, and attitude errors.
The following are the measured state variables:
𝛿𝑉
𝐸= 𝑉
INS𝐸
− 𝑉
GPS𝐸
,
𝛿𝑉
𝑁= 𝑉
INS𝑁
− 𝑉
GPS𝑁
,
𝛿𝑉
𝑈= 𝑉
INS𝑈
− 𝑉
GPS𝑈
,
𝛿𝐿 = 𝐿
INS− 𝐿
GPS,
𝛿𝜆 = 𝜆
INS− 𝜆
GPS,
𝛿ℎ = ℎ
INS− ℎ
GPS.
(4)
The measurement model is defined as
𝑍 (𝑡) = 𝐻 (𝑡)𝑋 (𝑡) + 𝑉 (𝑡) ,
𝑍 = [𝛿𝐿 𝛿𝜆 𝛿ℎ 𝛿𝑉
𝐸𝛿𝑉
𝑁𝛿𝑉
𝑈] .
(5)
2.2. Data Collection. A set of vessel dynamic data are selectedto verify the proposed filtering algorithms. The experimentparameters are as follows: gyro constant drifts of east, north,and up direction are all 1∘/h; gyro random drift is 0.3∘/h;accelerometer constant and random biases both are 0.08mg;original heading, pitch, and roll angle are, respectively, 79.36∘,0∘, and 0∘; original velocity is 0.01m/s and original velocityerror is 0.01m/s; and original longitude is 126.682234∘ andoriginal latitude is 45.776563∘. The GPS/INS system is shownin Figure 2. The INS and GPS data acquisition interfaces inPC are shown in Figures 3 and 4, respectively.

Mathematical Problems in Engineering 3
Figure 2: The GPS/INS system.
Figure 3: The INS data acquisition interface in PC.
3. Extended Kalman Particle Filter
3.1. Traditional Kalman Filter. The Kalman filter is a set ofmathematical equations which can provide an efficient com-putational method to recursively estimate the state and errorcovariance of a process, in a way that minimizes the mean ofthe squared error covariance. The estimate process containstwo steps: prediction and update. Consider a state spacedynamic equation of a time-variant system model and ameasurement model as
𝑋
𝑘= 𝜙
𝑘,𝑘−1𝑋
𝑘−1+ Γ
𝑘−1𝑊
𝑘−1,
𝑍
𝑘= 𝐻
𝑘𝑋
𝑘−1+ 𝑉
𝑘,
(6)
where the subscript 𝑘 stands for the iteration time 𝑡
𝑘; 𝑋𝑘is
the state of system at time 𝑡
𝑘−1; 𝑍𝑘is the measurement at
time 𝑡
𝑘; 𝜙 and 𝐻 are the state and measurement transition
matrices, respectively, which in practice can be consideredas invariable; 𝑊
𝑘denotes the process noise; 𝑉
𝑘denotes
the measurement noise; and Γ denotes the process noisematrices.
The equations for the KF are divided into two groups:time update equations and measurement update equations.The time update equations also can be thought of as predictorequations, while the measurement update equations can bethought of as corrector equations. If 𝜙, 𝐻, and 𝑄 can beassumed as constant, the time update equations are as follows:
Predicted state:
𝑋
𝑘|𝑘−1= 𝜙
𝑘,𝑘−1
𝑋
𝑘−1,
Prediction covariance: 𝑃𝑘|𝑘−1
=𝜙
𝑘,𝑘−1𝑃
𝑘−1𝜙
𝑇
𝑘,𝑘−1+Γ
𝑘−1𝑄
𝑘−1Γ
𝑇
𝑘−1,
(7)
Figure 4: The GPS data acquisition interface in PC.
Table 1: Comparisons of consumption burden.
KF EKPFTime (𝜇s) 423.20 1095.98
where 𝑄 is the process noise covariance matrix. While themeasurement update equations are
Kalman gain: 𝐾𝑘= 𝑃
𝑘|𝑘−1𝐻
𝑇
𝑘(𝐻
𝑘𝑃
𝑘|𝑘−1𝐻
𝑇
𝑘+ 𝑅
𝑘)
−1
,
Estimated state: 𝑋𝑘=
𝑋
𝑘|𝑘−1+ 𝐾
𝑘(𝑍
𝑘− 𝐻
𝑘
𝑋
𝑘|𝑘−1) ,
Estimated covariance: 𝑃𝑘= (𝐼 − 𝐾
𝑘𝐻
𝑘) 𝑃
𝑘|𝑘−1.
(8)
3.2. Extended Kalman Particle Filter. PF algorithm is basedon sequential importance sampling (SIS) step, which formsthe basis for most sequential Monte Carlo filters. Comparedwith the traditional KF, PF is more suitable for nonlinearand non-Gaussian systems, so PF is gradually used in signaltracking, robot control, navigation and positioning, andmany other fields. But it also has many drawbacks, suchas degeneracy phenomenon, large amount of computation,and sample impoverishment caused by re-sampling. A moredetailed description of PF is beyond the scope of this paper.The reader is encouraged to consult one of the many papersabout the PF, such as [20–22].
In order to improve the performance of PF, EKF algo-rithm is introduced. It uses the local linearization methodfor approximation of the importance density moving theparticles to the high likelihood region, and then the optimalimportance density can be approximated. This filtering algo-rithm is called EKPF. The EKPF algorithm is summarized asfollows.
(i) Initialization:
𝑋
𝑘∼ 𝑝 (𝑥
0) ,
𝑃
𝑖
0= var (𝑥
0) , 𝑤
𝑖
0=
1
𝑁
. (9)
4 Mathematical Problems in Engineering
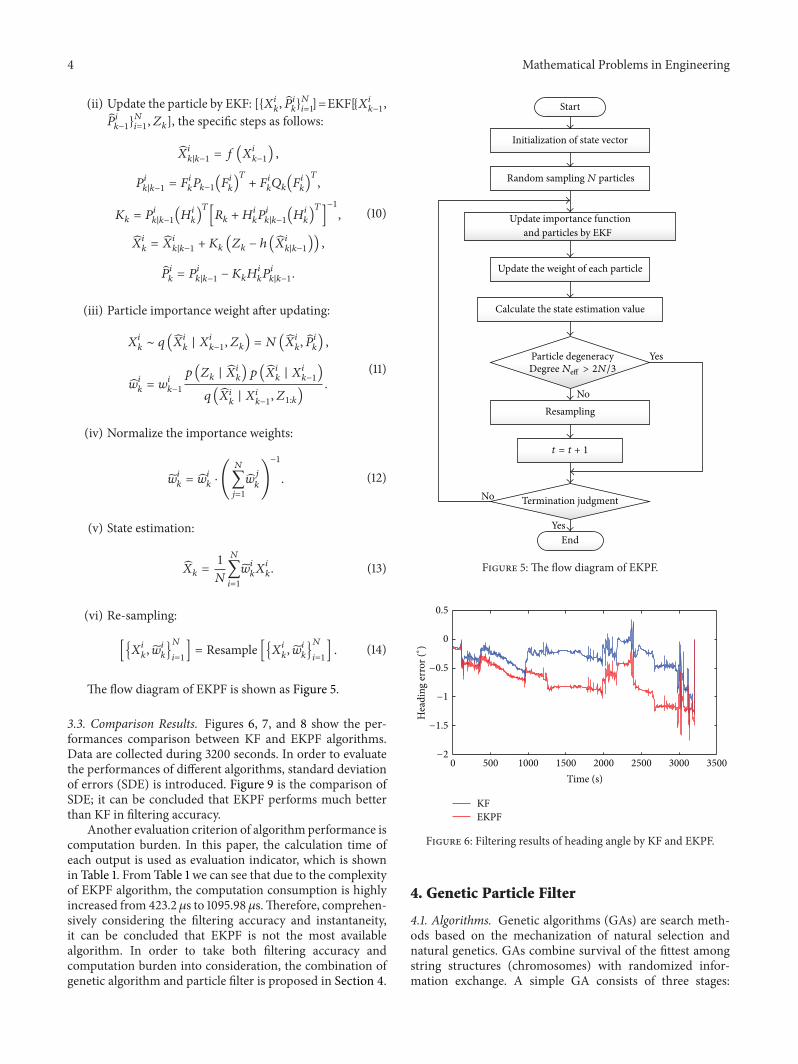
(ii) Update the particle by EKF: [{𝑋𝑖𝑘,
𝑃
𝑖
𝑘}
𝑁
𝑖=1]=EKF[{𝑋𝑖
𝑘−1,
𝑃
𝑖
𝑘−1}
𝑁
𝑖=1, 𝑍
𝑘], the specific steps as follows:
𝑋
𝑖
𝑘|𝑘−1= 𝑓 (𝑋
𝑖
𝑘−1) ,
𝑃
𝑖
𝑘|𝑘−1= 𝐹
𝑖
𝑘𝑃
𝑘−1(𝐹
𝑖
𝑘)
𝑇
+ 𝐹
𝑖
𝑘𝑄
𝑘(𝐹
𝑖
𝑘)
𝑇
,
𝐾
𝑘= 𝑃
𝑖
𝑘|𝑘−1(𝐻
𝑖
𝑘)
𝑇
[𝑅
𝑘+ 𝐻
𝑖
𝑘𝑃
𝑖
𝑘|𝑘−1(𝐻
𝑖
𝑘)
𝑇
]
−1
,
𝑋
𝑖
𝑘=
𝑋
𝑖
𝑘|𝑘−1+ 𝐾
𝑘(𝑍
𝑘− ℎ (
𝑋
𝑖
𝑘|𝑘−1)) ,
𝑃
𝑖
𝑘= 𝑃
𝑖
𝑘|𝑘−1− 𝐾
𝑘𝐻
𝑖
𝑘𝑃
𝑖
𝑘|𝑘−1.
(10)
(iii) Particle importance weight after updating:
𝑋
𝑖
𝑘∼ 𝑞 (
𝑋
𝑖
𝑘| 𝑋
𝑖
𝑘−1, 𝑍
𝑘) = 𝑁(
𝑋
𝑖
𝑘,
𝑃
𝑖
𝑘) ,
𝑤
𝑖
𝑘= 𝑤
𝑖
𝑘−1
𝑝 (𝑍
𝑘|
𝑋
𝑖
𝑘) 𝑝 (
𝑋
𝑖
𝑘| 𝑋
𝑖
𝑘−1)
𝑞 (
𝑋
𝑖
𝑘| 𝑋
𝑖
𝑘−1, 𝑍
1:𝑘)
.
(11)
(iv) Normalize the importance weights:
𝑤
𝑖
𝑘= 𝑤
𝑖
𝑘⋅ (
𝑁
∑
𝑗=1
𝑤
𝑗
𝑘)
−1
.(12)
(v) State estimation:
𝑋
𝑘=
1
𝑁
𝑁
∑
𝑖=1
𝑤
𝑖
𝑘𝑋
𝑖
𝑘. (13)
(vi) Re-sampling:
[{𝑋
𝑖
𝑘, 𝑤
𝑖
𝑘}
𝑁
𝑖=1] = Resample [{𝑋𝑖
𝑘, 𝑤
𝑖
𝑘}
𝑁
𝑖=1] . (14)
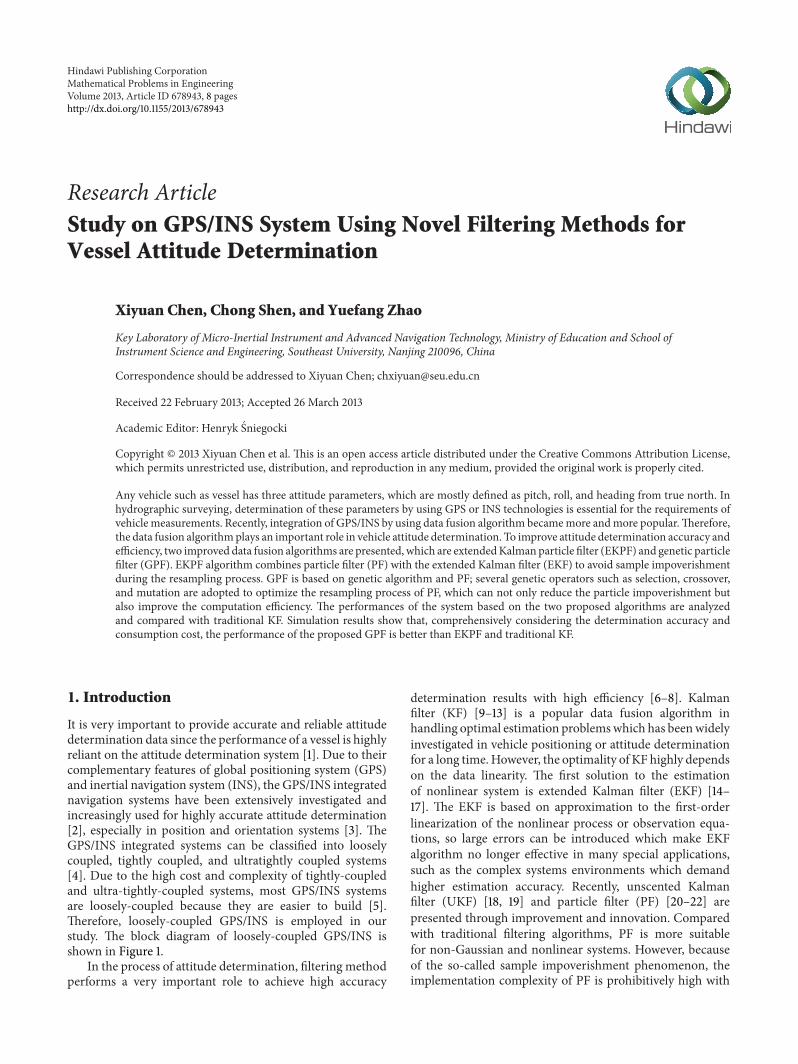
The flow diagram of EKPF is shown as Figure 5.
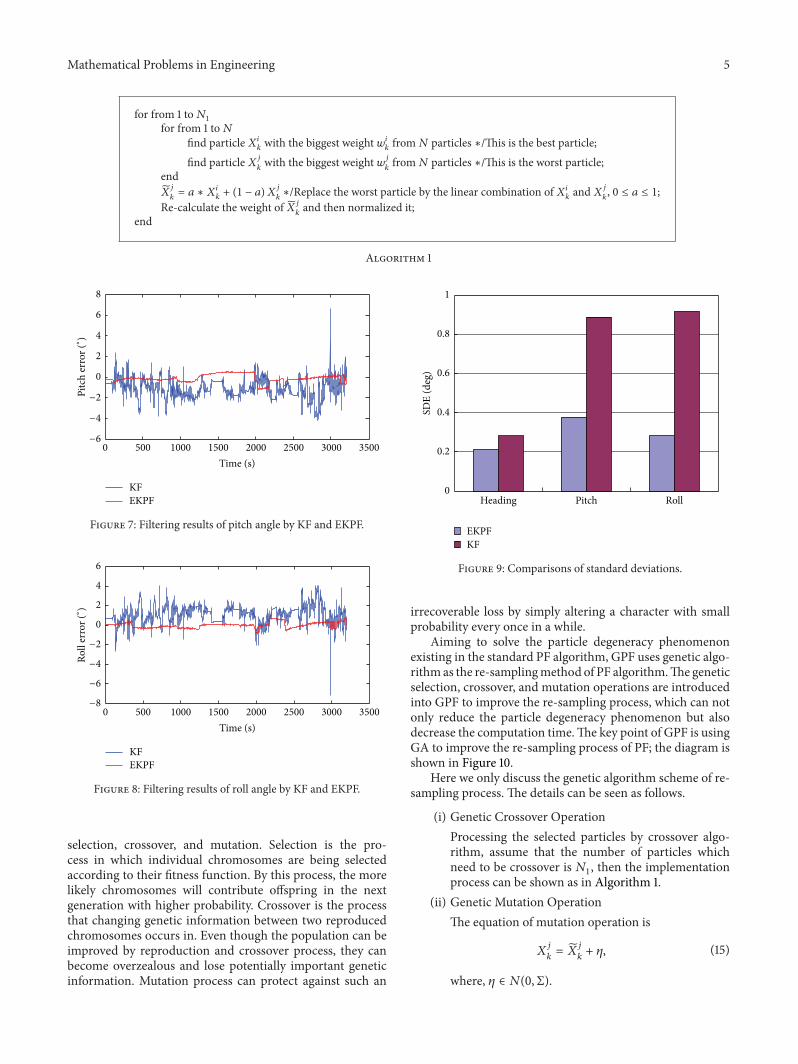
3.3. Comparison Results. Figures 6, 7, and 8 show the per-formances comparison between KF and EKPF algorithms.Data are collected during 3200 seconds. In order to evaluatethe performances of different algorithms, standard deviationof errors (SDE) is introduced. Figure 9 is the comparison ofSDE; it can be concluded that EKPF performs much betterthan KF in filtering accuracy.
Another evaluation criterion of algorithm performance iscomputation burden. In this paper, the calculation time ofeach output is used as evaluation indicator, which is shownin Table 1. From Table 1 we can see that due to the complexityof EKPF algorithm, the computation consumption is highlyincreased from 423.2𝜇s to 1095.98 𝜇s.Therefore, comprehen-sively considering the filtering accuracy and instantaneity,it can be concluded that EKPF is not the most availablealgorithm. In order to take both filtering accuracy andcomputation burden into consideration, the combination ofgenetic algorithm and particle filter is proposed in Section 4.
Initialization of state vector
Start
End
Update importance functionand particles by EKF
Update the weight of each particle
𝑡 = 𝑡 + 1
Calculate the state estimation value
Particle degeneracy
Termination judgment
Yes
No
No
Yes
Random sampling𝑁 particles
Degree𝑁eff > 2𝑁/3
Resampling
Figure 5: The flow diagram of EKPF.
0 500 1000 1500 2000 2500 3000 3500−2
−1.5
−1
−0.5
0
0.5
Hea
ding
erro
r (∘)
KFEKPF
Time (s)
Figure 6: Filtering results of heading angle by KF and EKPF.
4. Genetic Particle Filter
4.1. Algorithms. Genetic algorithms (GAs) are search meth-ods based on the mechanization of natural selection andnatural genetics. GAs combine survival of the fittest amongstring structures (chromosomes) with randomized infor-mation exchange. A simple GA consists of three stages:
Mathematical Problems in Engineering 5
for from 1 to𝑁
1
for from 1 to𝑁
find particle𝑋𝑖𝑘with the biggest weight 𝑤𝑖
𝑘from𝑁 particles ∗/This is the best particle;
find particle𝑋𝑗𝑘with the biggest weight 𝑤𝑗
𝑘from𝑁 particles ∗/This is the worst particle;
end
𝑋
𝑗
𝑘= 𝑎 ∗ 𝑋
𝑖
𝑘+ (1 − 𝑎)𝑋
𝑗
𝑘∗/Replace the worst particle by the linear combination of𝑋𝑖
𝑘and𝑋
𝑗
𝑘, 0 ≤ 𝑎 ≤ 1;
Re-calculate the weight of 𝑋𝑗𝑘and then normalized it;
end
Algorithm 1
0 500 1000 1500 2000 2500 3000 3500−6
−4
−2
0
2
4
6
8
Time (s)
Pitc
h er
ror (∘)
KFEKPF
Figure 7: Filtering results of pitch angle by KF and EKPF.
0 500 1000 1500 2000 2500 3000 3500−8
−6
−4
−2
0
2
4
6
Time (s)
Roll
erro
r (∘)
KFEKPF
Figure 8: Filtering results of roll angle by KF and EKPF.
selection, crossover, and mutation. Selection is the pro-cess in which individual chromosomes are being selectedaccording to their fitness function. By this process, the morelikely chromosomes will contribute offspring in the nextgeneration with higher probability. Crossover is the processthat changing genetic information between two reproducedchromosomes occurs in. Even though the population can beimproved by reproduction and crossover process, they canbecome overzealous and lose potentially important geneticinformation. Mutation process can protect against such an
0
0.2
0.4
0.6
0.8
1
SDE
(deg
)
Heading Pitch Roll
EKPFKF
Figure 9: Comparisons of standard deviations.
irrecoverable loss by simply altering a character with smallprobability every once in a while.
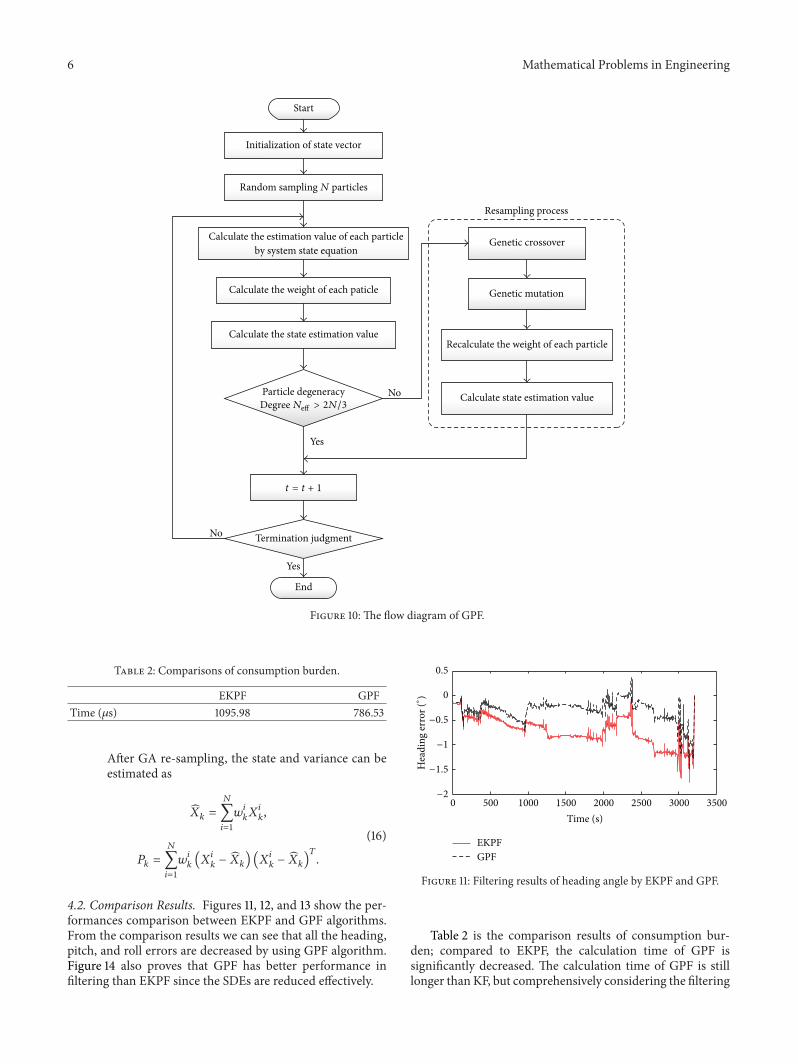
Aiming to solve the particle degeneracy phenomenonexisting in the standard PF algorithm, GPF uses genetic algo-rithmas the re-samplingmethod of PF algorithm.Thegeneticselection, crossover, and mutation operations are introducedinto GPF to improve the re-sampling process, which can notonly reduce the particle degeneracy phenomenon but alsodecrease the computation time.The key point of GPF is usingGA to improve the re-sampling process of PF; the diagram isshown in Figure 10.
Here we only discuss the genetic algorithm scheme of re-sampling process. The details can be seen as follows.
(i) Genetic Crossover OperationProcessing the selected particles by crossover algo-rithm, assume that the number of particles whichneed to be crossover is 𝑁
1, then the implementation
process can be shown as in Algorithm 1.(ii) Genetic Mutation Operation
The equation of mutation operation is
𝑋
𝑗
𝑘=
𝑋
𝑗
𝑘+ 𝜂,
(15)
where, 𝜂 ∈ 𝑁(0, Σ).
6 Mathematical Problems in Engineering
Initialization of state vector
Start
End
Random sampling𝑁 particles
Calculate the estimation value of each particleby system state equation
Calculate the weight of each paticle
𝑡 = 𝑡 + 1
Calculate the state estimation value
Particle degeneracy
Termination judgment
No
Yes
Yes
Genetic crossover
Genetic mutation
Calculate state estimation value
No
Degree𝑁eff > 2𝑁/3
Resampling process
Recalculate the weight of each particle
Figure 10: The flow diagram of GPF.
Table 2: Comparisons of consumption burden.
EKPF GPFTime (𝜇s) 1095.98 786.53
After GA re-sampling, the state and variance can beestimated as
𝑋
𝑘=
𝑁
∑
𝑖=1
𝑤
𝑖
𝑘𝑋
𝑖
𝑘,
𝑃
𝑘=
𝑁
∑
𝑖=1
𝑤
𝑖
𝑘(𝑋
𝑖
𝑘−
𝑋
𝑘) (𝑋
𝑖
𝑘−
𝑋
𝑘)
𝑇
.
(16)
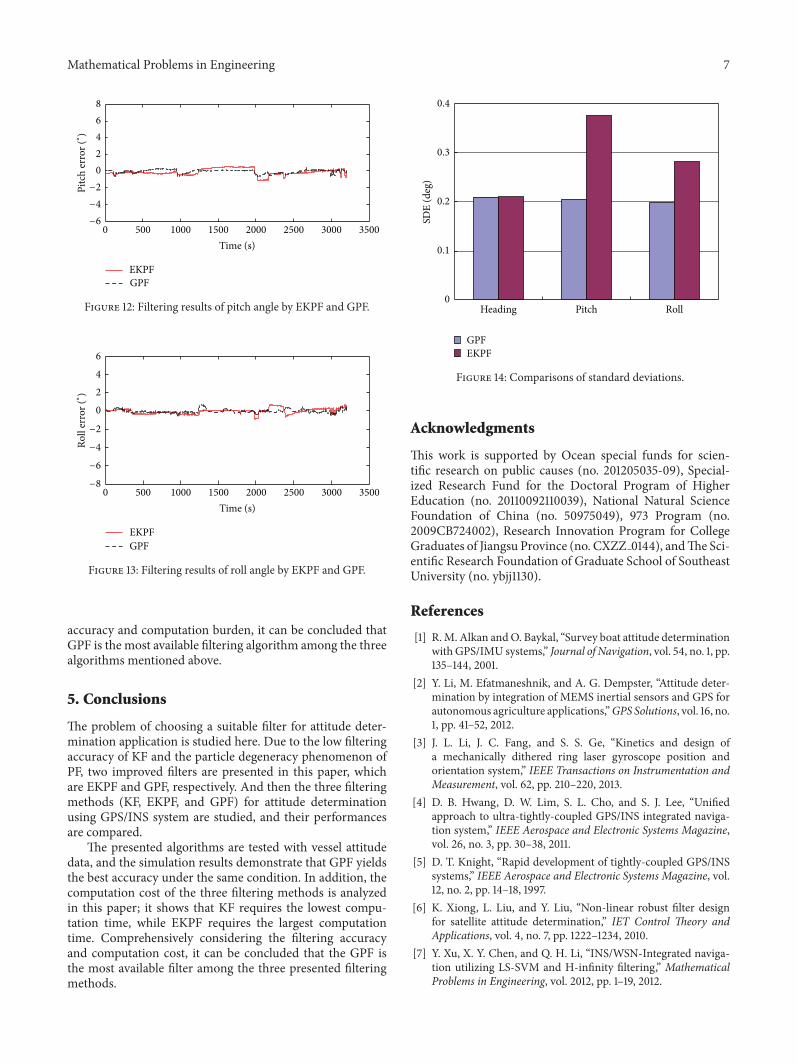
4.2. Comparison Results. Figures 11, 12, and 13 show the per-formances comparison between EKPF and GPF algorithms.From the comparison results we can see that all the heading,pitch, and roll errors are decreased by using GPF algorithm.Figure 14 also proves that GPF has better performance infiltering than EKPF since the SDEs are reduced effectively.
0 500 1000 1500 2000 2500 3000 3500−2
−1.5
−1
−0.5
0
0.5
Time (s)
Hea
ding
erro
r (∘)
EKPFGPF
Figure 11: Filtering results of heading angle by EKPF and GPF.
Table 2 is the comparison results of consumption bur-den; compared to EKPF, the calculation time of GPF issignificantly decreased. The calculation time of GPF is stilllonger than KF, but comprehensively considering the filtering
Mathematical Problems in Engineering 7
0 500 1000 1500 2000 2500 3000 3500−6
−4
−2
02468
Time (s)
Pitc
h er
ror (∘)
EKPFGPF
Figure 12: Filtering results of pitch angle by EKPF and GPF.
0 500 1000 1500 2000 2500 3000 3500−8
−6
−4
−2
0
2
4
6
Time (s)
Roll
erro
r (∘)
EKPFGPF
Figure 13: Filtering results of roll angle by EKPF and GPF.
accuracy and computation burden, it can be concluded thatGPF is the most available filtering algorithm among the threealgorithms mentioned above.
5. Conclusions
The problem of choosing a suitable filter for attitude deter-mination application is studied here. Due to the low filteringaccuracy of KF and the particle degeneracy phenomenon ofPF, two improved filters are presented in this paper, whichare EKPF and GPF, respectively. And then the three filteringmethods (KF, EKPF, and GPF) for attitude determinationusing GPS/INS system are studied, and their performancesare compared.
The presented algorithms are tested with vessel attitudedata, and the simulation results demonstrate that GPF yieldsthe best accuracy under the same condition. In addition, thecomputation cost of the three filtering methods is analyzedin this paper; it shows that KF requires the lowest compu-tation time, while EKPF requires the largest computationtime. Comprehensively considering the filtering accuracyand computation cost, it can be concluded that the GPF isthe most available filter among the three presented filteringmethods.
0
0.1
0.2
0.3
0.4
SDE
(deg
)
Heading Pitch Roll
GPFEKPF
Figure 14: Comparisons of standard deviations.
Acknowledgments
This work is supported by Ocean special funds for scien-tific research on public causes (no. 201205035-09), Special-ized Research Fund for the Doctoral Program of HigherEducation (no. 20110092110039), National Natural ScienceFoundation of China (no. 50975049), 973 Program (no.2009CB724002), Research Innovation Program for CollegeGraduates of Jiangsu Province (no. CXZZ 0144), andThe Sci-entific Research Foundation of Graduate School of SoutheastUniversity (no. ybjj1130).
References
[1] R.M. Alkan andO. Baykal, “Survey boat attitude determinationwithGPS/IMU systems,” Journal of Navigation, vol. 54, no. 1, pp.135–144, 2001.
[2] Y. Li, M. Efatmaneshnik, and A. G. Dempster, “Attitude deter-mination by integration of MEMS inertial sensors and GPS forautonomous agriculture applications,”GPS Solutions, vol. 16, no.1, pp. 41–52, 2012.
[3] J. L. Li, J. C. Fang, and S. S. Ge, “Kinetics and design ofa mechanically dithered ring laser gyroscope position andorientation system,” IEEE Transactions on Instrumentation andMeasurement, vol. 62, pp. 210–220, 2013.
[4] D. B. Hwang, D. W. Lim, S. L. Cho, and S. J. Lee, “Unifiedapproach to ultra-tightly-coupled GPS/INS integrated naviga-tion system,” IEEE Aerospace and Electronic Systems Magazine,vol. 26, no. 3, pp. 30–38, 2011.
[5] D. T. Knight, “Rapid development of tightly-coupled GPS/INSsystems,” IEEE Aerospace and Electronic Systems Magazine, vol.12, no. 2, pp. 14–18, 1997.
[6] K. Xiong, L. Liu, and Y. Liu, “Non-linear robust filter designfor satellite attitude determination,” IET Control Theory andApplications, vol. 4, no. 7, pp. 1222–1234, 2010.
[7] Y. Xu, X. Y. Chen, and Q. H. Li, “INS/WSN-Integrated naviga-tion utilizing LS-SVM and H-infinity filtering,” MathematicalProblems in Engineering, vol. 2012, pp. 1–19, 2012.
8 Mathematical Problems in Engineering
[8] A. Nemra and N. Aouf, “Robust INS/GPS sensor fusion forUAV localization using SDRE nonlinear filtering,” IEEE SensorsJournal, vol. 10, no. 4, pp. 789–798, 2010.
[9] S. H. P. Won, W. Melek, and F. Golnaraghi, “Fastening tooltracking system using a Kalman filter and particle filter combi-nation,” Measurement Science and Technology, vol. 12, pp. 1–12,2011.
[10] D. Y. Kim and M. Jeon, “Robust distributed Kalman filterfor wireless sensor networks with uncertain communicationchannels,” Mathematical Problems in Engineering, vol. 2012,Article ID 238597, 12 pages, 2012.
[11] X. J. Sun, Y. Gao, Z. L. Deng, C. Li, and J. W. Wang, “Multi-model information fusion Kalman filtering and white noisedeconvolution,” Information Fusion, vol. 11, no. 2, pp. 163–173,2010.
[12] X. L. Ning, X.Ma, C. Peng,W.Quan, and J. C. Fang, “Analysis offiltering methods for satellite autonomous orbit determinationusing celestial and geomagnetic measurement,” MathematicalProblems in Engineering, vol. 2012, Article ID 267875, 16 pages,2012.
[13] S. Wang, C. M. Wang, M. L. Chang, C. T. Tsai, and C. I.Chang, “Applications of kalman filtering to single hyperspectralsignature analysis,” IEEE Sensors Journal, vol. 10, pp. 547–563,2010.
[14] F. Jiancheng and Y. Sheng, “Study on innovation adaptive EKFfor in-flight alignment of airborne POS,” IEEE Transactions onInstrumentation andMeasurement, vol. 60, no. 4, pp. 1378–1388,2011.
[15] C. S. Draper, J. F. Mahfouf, and J. P. Walker, “An EKF assim-ilation of AMSR-E soil moisture into the ISBA land surfacescheme,” Journal of Geophysical Research D, vol. 114, no. 20,Article ID D20104, 2009.
[16] G. P. Huang, A. I. Mourikis, and S. I. Roumeliotis, “Obser-vability-based rules for designing consistent EKF SLAM esti-mators,” International Journal of Robotics Research, vol. 29, no.5, pp. 502–528, 2010.
[17] L. F. De Melo and J. F. Mangili Jr., “Trajectory planning fornonholonomic mobile robot using extended Kalman filter,”Mathematical Problems in Engineering, vol. 2010, Article ID979205, 22 pages, 2010.
[18] D. J. Jwo andC. N. Lai, “Unscented Kalman filter with nonlineardynamic process modeling for GPS navigation,” GPS Solutions,vol. 12, no. 4, pp. 249–260, 2008.
[19] U. Z. Ijaz, S. I. Chung, A. K. Khambampati, K. Y. Kim, and S.Kim, “Electrical resistance imaging of a time-varying interfacein stratified flows using an unscented Kalman filter,” Meas-urement Science and Technology, vol. 19, no. 6, Article ID 065501,2008.
[20] S. Sarkka, A. Vehtari, and J. Lampinen, “Rao-Blackwellizedparticle filter for multiple target tracking,” Information Fusion,vol. 8, no. 1, pp. 2–15, 2007.
[21] S. Hong, J. Lee, A. Athalye, P.M. Djuric, andW.D. Cho, “Designmethodology for domain specific parameterizable particle filterrealizations,” IEEE Transactions on Circuits and Systems I, vol.54, no. 9, pp. 1987–2000, 2007.
[22] X. H. Zhong, A. B. Premkumar, and A. S. Madhukumar,“Particle filtering and posterior cramer-rao bound for 2-Ddirection of arrival tracking using an acoustic vector sensor,”IEEE Sensors Journal, vol. 12, pp. 363–377, 2012.
[23] H. Qin, L. Cong, and Z. Li, “Resampling from the Nichinggenetic algorithm applicated in Extended Kalman particle
filter,” Chinese Journal of Electronics, vol. 20, no. 3, pp. 553–559,2011.
[24] C. Perales-Gravan and R. Lahoz-Beltra, “An AM radio receiverdesigned with a genetic algorithm based on a bacterial con-jugation genetic operator,” IEEE Transactions on EvolutionaryComputation, vol. 12, no. 2, pp. 129–142, 2008.
[25] Y. Fu, M. Ding, and C. Zhou, “Phase angle-encoded andquantum-behaved particle swarm optimization applied tothree-dimensional route planning for UAV,” IEEE Transactionson Systems, Man, and Cybernetics A, vol. 42, no. 2, pp. 511–526,2012.
[26] X. Ning and J. Fang, “Spacecraft autonomous navigation usingunscented particle filter-based celestial/Doppler informationfusion,” Measurement Science and Technology, vol. 19, no. 9,Article ID 095203, 2008.
Submit your manuscripts athttp://www.hindawi.com
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Mathematical Problems in Engineering
Hindawi Publishing Corporationhttp://www.hindawi.com
Differential EquationsInternational Journal of
Volume 2014
Applied MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Probability and StatisticsHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Mathematical PhysicsAdvances in
Complex AnalysisJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
OptimizationJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
CombinatoricsHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
International Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Operations ResearchAdvances in
Journal of
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Function Spaces
Abstract and Applied AnalysisHindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
International Journal of Mathematics and Mathematical Sciences
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
The Scientific World JournalHindawi Publishing Corporation http://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Algebra
Discrete Dynamics in Nature and Society
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Decision SciencesAdvances in
Discrete MathematicsJournal of
Hindawi Publishing Corporationhttp://www.hindawi.com
Volume 2014 Hindawi Publishing Corporationhttp://www.hindawi.com Volume 2014
Stochastic AnalysisInternational Journal of