Embed Size (px)
Citation preview

Revealing hidden scenes by photon-efficientocclusion-based opportunistic active imagingFEIHU XU,1,4,5,* GAL SHULKIND,1,2,5 CHRISTOS THRAMPOULIDIS,1,5
JEFFREY H. SHAPIRO,1,2 ANTONIO TORRALBA,2,3 FRANCO N. C.WONG,1 AND GREGORY W. WORNELL1,2
1
Research Laboratory of Electronics, Massachusetts Institute of Technology, Cambridge, MA 02139, USA
2
Department of Electrical Engineering and Computer Science, Massachusetts Institute of Technology,
Cambridge, MA 02139, USA
3
Computer Science and Artificial Intelligence Laboratory, Massachusetts Institute of Technology,
Cambridge, MA 02139, USA
4
Present address: Shanghai Branch, National Laboratory for Physical Sciences at the Microscale,
University of Science and Technology of China, Shanghai 201315, China
5
These authors contributed equally.
*
Abstract: The ability to see around corners, i.e., recover details of a hidden scene from
its reflections in the surrounding environment, is of considerable interest in a wide range of
applications. However, the di�use nature of light reflected from typical surfaces leads to mixing of
spatial information in the collected light, precluding useful scene reconstruction. Here, we employ
a computational imaging technique that opportunistically exploits the presence of occluding
objects, which obstruct probe-light propagation in the hidden scene, to undo the mixing and
greatly improve scene recovery. Importantly, our technique obviates the need for the ultrafast
time-of-flight measurements employed by most previous approaches to hidden-scene imaging.
Moreover, it does so in a photon-e�cient manner (i.e., it only requires a small number of
photon detections) based on an accurate forward model and a computational algorithm that,
together, respect the physics of three-bounce light propagation and single-photon detection.
Using our methodology, we demonstrate reconstruction of hidden-surface reflectivity patterns
in a meter-scale environment from non-time-resolved measurements. Ultimately, our technique
represents an instance of a rich and promising new imaging modality with important potential
implications for imaging science.
© 2018 Optical Society of America under the terms of the OSA Open Access Publishing Agreement
OCIS codes: (110.0110) Imaging systems; (110.1758) Computational imaging; (100.3190) Inverse problems.
References and links1. B. Sun, M. P. Edgar, R. Bowman, L. E. Vittert, S. Welsh, A. Bowman, and M. J. Padgett, “3D computational imaging
with single-pixel detectors,” Science 340, 844–847 (2013).
2. A. Kirmani, D. Venkatraman, D. Shin, A. Colaço, F. N. C. Wong, J. H. Shapiro, and V. K. Goyal, “First-photon
imaging,” Science 343, 58–61 (2014).
3. L. Gao, J. Liang, C. Li, and L. V. Wang, “Single-shot compressed ultrafast photography at one hundred billion frames
per second,” Nature 516, 74–77 (2014).
4. A. M. Pawlikowska, A. Halimi, R. A. Lamb, and G. S. Buller, “Single-photon three-dimensional imaging at up to 10
kilometers range,” Opt. Express 25, 11919–11931 (2017).
5. E. Repasi, P. Lutzmann, O. Steinvall, M. Elmqvist, B. Göhler, and G. Anstett, “Advanced short-wavelength infrared
range-gated imaging for ground applications in monostatic and bistatic configurations,” Appl. Opt. 48, 5956–5969
(2009).
6. A. Sume, M. Gustafsson, M. Herberthson, A. Janis, S. Nilsson, J. Rahm, and A. Orbom, “Radar detection of moving
targets behind corners,” IEEE Trans. Geosci. Remote Sens. 49, 2259–2267 (2011).
7. B. Chakraborty, Y. Li, J. J. Zhang, T. Trueblood, A. Papandreou-Suppappola, and D. Morrell, “Multipath exploitation
with adaptive waveform design for tracking in urban terrain,” in Proceedings of IEEE International Conference on
Acoustics, Speech and Signal Processing (IEEE 2010), pp. 3894–3897.
Vol. 26, No. 8 | 16 Apr 2018 | OPTICS EXPRESS 9945
#323002 https://doi.org/10.1364/OE.26.009945 Journal © 2018 Received 13 Feb 2018; revised 24 Mar 2018; accepted 26 Mar 2018; published 6 Apr 2018

8. O. Steinvall, M. Elmqvist, and H. Larsson, “See around the corner using active imaging,” Proc. SPIE 8186, 818605
(2011).
9. A. P. Mosk, A. Lagendijk, G. Lerosey, and M. Fink, “Controlling waves in space and time for imaging and focusing
in complex media,” Nat. Photonics 6, 283–292 (2012).
10. O. Katz, E. Small, and Y. Silberberg, “Looking around corners and through thin turbid layers in real time with
scattered incoherent light,” Nat. Photonics 6, 549–553 (2012).
11. A. Kirmani, T. Hutchison, J. Davis, and R. Raskar, “Looking around the corner using transient imaging,” in
Proceedings of IEEE International Conference on Computer Vision (IEEE, 2009), pp. 159–166.
12. A. Velten, T. Willwacher, O. Gupta, A. Veeraraghavan, M. G. Bawendi, and R. Raskar, “Recovering three-dimensional
shape around a corner using ultrafast time-of-flight imaging,” Nat. Commun. 3, 745 (2012).
13. O. Gupta, T. Willwacher, A. Velten, A. Veeraraghavan, and R. Raskar, “Reconstruction of hidden 3D shapes using
di�use reflections,” Opt. Express 20, 19096–19108 (2012).
14. F. Heide, L. Xiao, W. Heidrich, and M. B. Hullin, “Di�use mirrors: 3D reconstruction from di�use indirect
illumination using inexpensive time-of-flight sensors,” in Proceedings of IEEE Conference on Computer Vision and
Pattern Recognition (IEEE, 2014), pp. 3222–3229.
15. M. Laurenzis and A. Velten, “Nonline-of-sight laser gated viewing of scattered photons,” Opt. Eng. 53, 023102
(2014).
16. G. Gariepy, F. Tonolini, R. Henderson, J. Leach, and D. Faccio, “Detection and tracking of moving objects hidden
from view,” Nat. Photonics 10, 23–26 (2016).
17. M. Laurenzis, J. Klein, E. Bacher, and N. Metzger, “Multiple-return single-photon counting of light in flight and
sensing of non-line-of-sight objects at shortwave infrared wavelengths,” Opt. Lett. 40, 4815–4818 (2015).
18. M. Buttafava, J. Zeman, A. Tosi, K. Eliceiri, and A. Velten, “Non-line-of-sight imaging using a time-gated single
photon avalanche diode,” Opt. Express 23, 20997–21011 (2015).
19. J. Klein, C. Peters, J. Martín, M. Laurenzis, and M. B. Hullin, “Tracking objects outside the line of sight using 2D
intensity images,” Sci. Rep. 6, 32491 (2016).
20. C. Thrampoulidis, G. Shulkind, F. Xu, W. T. Freeman, J. H. Shapiro, A. Torralba, F. N. C. Wong, and G. W. Wornell
“Exploiting occlusion in non-line-of-sight active imaging,” arXiv:1711.06297 (2017).
21. A. L. Cohen, “Anti-pinhole imaging,” J. Mod. Opt. 29, 63–67 (1982).
22. A. Torralba and W. T. Freeman, “Accidental pinhole and pinspeck cameras: Revealing the scene outside the picture,”
in Proceedings of IEEE Conference on Computer Vision and Pattern Recognition (IEEE, 2012), pp.. 374–381.
23. R. H. Hadfield, “Single-photon detectors for optical quantum information applications,” Nat. Photonics 3, 696–705
(2009).
24. G. Buller and R. J. Collins, “Single-photon generation and detection,” Meas. Sci. Technol. 21, 012002 (2010).
25. D. Shin, A. Kirmani, V. K. Goyal, and J. H. Shapiro, “Photon-e�cient computational 3-D and reflectivity imaging
with single-photon detectors,” IEEE Trans. Comput. Imaging 1, 112–125 (2015).
26. L. I. Rudin, S. Osher, and E. Fatemi, “Nonlinear total variation based noise removal algorithms,” Physica D 60,259–268 (1992).
27. Z. T. Harmany, R. F. Marcia, and R. M. Willett, “This is SPIRAL-TAP: Sparse Poisson intensity reconstruction
algorithms—theory and practice,” IEEE Trans. Image Process. 21, 1084–1096 (2012).
28. D. Shin, F. Xu, D. Venkatraman, R. Lussana, F. Villa, F. Zappa, V. K. Goyal, F. N. C. Wong, and J. H. Shapiro,
“Photon-e�cient imaging with a single-photon camera,” Nat. Commun. 7, 12046 (2016).
1. Introduction
In recent years, remarkable advances have been achieved in computational imaging, image
processing and computer vision [1–4]. Whereas conventional imaging involves direct line-of-
sight transport from a light source to a scene, and from the scene back to a camera sensor, the
problem of imaging scenes that are hidden from the camera’s direct line of sight, referred to
as seeing around corners or non-line-of-sight (NLoS) imaging, has attracted growing interest.
Indeed, the ability to reconstruct hidden scenes has the potential to be transformative in important
and diverse applications, including, e.g., medicine, transportation, manufacturing, scientific
imaging, public safety, and security.
Techniques for NLoS imaging that have been recently demonstrated include time-gated viewing
from specular reflections [5–8], wavefront shaping [9, 10], and transient imaging, in which time-
of-flight (ToF) measurements are collected [11–18]. ToF active imaging using short-duration laser
pulses (the most commonly used approach) provide only indirect access to scene information,
through detection of photons that have been di�usely reflected by intervening surfaces, which
mixes the spatial information they carry. Such systems have used picosecond-resolution ToF
measurements—as obtained from a streak camera [12,13] or a single-photon avalanche diode
Vol. 26, No. 8 | 16 Apr 2018 | OPTICS EXPRESS 9946

(SPAD) detector [16–18]—to recover hidden scenes. However, collecting such measurements
involves complicated and costly apparatus [18]. Klein et al. has reported tracking NLoS objects
using intensity images [19]; however, its tracking problem is parametric in nature, allowing it to
retrieve object translation and rotation only in the case of known objects. In contrast, our focus is
on a non-parametric setting, with the goal of retrieving the unknown reflectivity pattern on a
hidden surface.
Recently, in [20], we proposed a new NLoS imaging framework that opportunistically exploits
the presence of opaque occluders in the light propagation path within the hidden space to
distinguish light emanating from di�erent parts of the hidden scene (see Visualization 1 ). This
framework was shown to recover spatial information otherwise destroyed by di�use reflection,
without reliance on ultrafast ToF measurements. The approach is reminiscent of pin-speck (or anti-
pinhole) imaging [21,22], in which an occluder in the scene serves as a defacto lens that facilitates
imaging. The focus of [20] was a theoretical study of the framework. The model developed there
assumes additive signal-independent Gaussian noise, hence the reconstruction algorithm and
the preliminary experiment reported in [20] are tailored to a Gaussian-likelihood method. This
Gaussian-noise assumption, however, does not adequately represent shot-noise-limited operation,
which prevails in the low-photon-count regime.
In this paper, we extend the applicability of occlusion-based NLoS imaging to operation in that
low-photon-count regime. We experimentally demonstrate an imaging system with substantially
higher photon e�ciency than that reported in [20], performance that is crucial for fast and
low-power NLoS imaging. To do so, we develop an accurate forward model and a photon-e�cient
computational algorithm based on a binomial-likelihood method that, together, respect the physics
of three-bounce light propagation and SPAD-based photodetection. As a result, we achieve a 16⇥speedup in the data acquisition process, because information from 16⇥ fewer photon detections
than employed in [20] su�ce to produce images of equal quality. Moreover, unlike [20], we report
full details of our experiments that, in addition to the photon-e�ciency demonstration, include
investigations of issues—such as the e�ects of occluder size and the algorithm’s regularization
parameter on scene reconstruction—that were only studied theoretically in [20].
2. Imaging scenario
Our system configuration is illustrated in Fig. 1(a) and a top view of the experimental setup is
illustrated in Fig. 2. The objective is to reconstruct the unknown reflectivity pattern on the hidden
wall. The visible wall is illuminated by a repetitively-pulsed laser that raster scans an m ⇥ mgrid. The photons detected from illumination of a particular scan point have undergone three
bounces: first, reflection o� the visible wall in the direction of the hidden wall; second, reflection
o� the hidden wall in the direction of the visible wall, where the reflection is multiplicatively
scaled by the reflectivity pattern of the hidden wall we seek to recover; and third, reflection o�
the visible wall in the direction of a SPAD. As shown in Fig. 2(a), the SPAD’s field of view
is configured for the left side of the visible wall, to avoid the direct first bounce and to detect
as many third-bounce photons as possible. We use a single-pixel SPAD instead of a normal
charge-coupled device (CCD) camera, because of its single-photon sensitivity. This is necessary
because the returned pulse energy after the three bounces is heavily attenuated (⇠130-140 dB
in our room-scale experiment), severely limiting the number of detected photons. Thus, the
SPAD enables e�cient NLoS imaging. We remark that although a SPAD is capable of providing
time-stamped measurements, we discard the SPAD’s time-resolved information by integrating
detections over a time-gating window to collect just an m ⇥ m matrix of the raw photon counts
obtained from illumination of each laser grid point. To further clarify, we emphasize that a
SPAD is not strictly necessary for our imaging method, as we show next that reconstruction is
possible when we throw away the detected third-bounce photons’ time signatures. Although not
demonstrated here, alternative high-sensitivity sensors with no or poor timing resolution—such
Vol. 26, No. 8 | 16 Apr 2018 | OPTICS EXPRESS 9947

b
d
c
e
No Occluder With Occluder
Ra
w c
ou
nts
Re
co
nstru
ctio
n
a
0
0.2
0.4
0.6
0.8
1
200
250
300
350
400
200
250
300
350
400
0
0.2
0.4
0.6
0.8
1
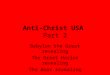
Fig. 1. (a) Experimental configuration. The goal is to reconstruct the reflectivity pattern on
the hidden wall. A repetitively-pulsed laser source raster scans a di�use (nearly Lambertian)
visible wall. Photons striking the visible wall reflect toward the hidden wall, reflect at the
hidden wall back toward the visible wall, and finally reflect at the visible wall toward the
single-photon avalanche diode (SPAD), whose optics are configured to detect backscattered
photons from a large patch on the visible wall. The counts are recorded by a single-photon
counting module and further computer processed. When present, an occluder (circular
black patch) obstructs some light-propagation paths from the visible wall to the hidden wall
(casting a subtle shadow), and from the hidden wall to the visible wall. (b) Raw photon
counts in the absence of an occluder. (c) Raw photon counts in the presence of the occluder.
(d) Reconstructed reflectivity from the counts in (b). (e) Reconstructed reflectivity from the
counts in (c).
as an intensified CCD or electron-multiplying CCD—can also be used in our experiment. We
will investigate such modifications in future work.
We performed this experiment twice, first with no obstruction between the visible and the hidden
walls, and then with a black circular occluder inserted between those walls to block some of the
light propagating from the visible wall toward the hidden wall, and some of the light propagating
from the hidden wall back toward the visible wall, as illustrated in Fig. 1(a). The corresponding
matrices of raw photon counts are shown in Figs. 1(b) and 1(c). We derive an accurate forward
model and solve the resulting inverse problem using a photon-e�cient reconstruction algorithm
that is tailored to the low-photon-count regime associated with three-bounce propagation (see
below). Figs. 1(d) and 1(e) show that reconstruction of the hidden-wall reflectivity pattern failed
when photon counts were collected without an occluder being present, but succeeded when
they were collected in the presence of the occluder. In Figs. 3(a)–3(c), we present experimental
results in which di�erent patterns are placed on the hidden wall. These results demonstrate
that obstructions in the light propagation path enable imaging from non-time-resolved photon
counts. Indeed, as will be explained, occluders do so by increasing the informativeness of
measurements made in their presence. Note that we have assumed knowledge of the occluder’s
location. This information is easily obtained if the occluder is visible from the detector’s vantage
point. Moreover, we have initial indication that location information for the occluder can be
gleaned from raw-count data (see below).
3. Forward model
In this section, we present a ray-optics light propagation model (see details in Appendix A)
that relates the unknown reflectivity on a Lambertian hidden wall to the raw photon counts for
specified experimental parameters. The model accounts for: (i) third-bounce reflections involving
the hidden wall; (ii) occlusions in the scene; (iii) a low photon-count operating regime; and (iv)
Vol. 26, No. 8 | 16 Apr 2018 | OPTICS EXPRESS 9948

3rd (c) 1st (𝑙𝑖,𝑗)
2nd (x)
(Λ)
(Ω)
SPAD field of view
Scanning positions
Fig. 2. Top view of experimental setup and a three-bounce light trajectory of the form
⇤! `i j ! x ! c ! ⌦. The laser (⇤) illuminates the visible wall (`i j ) and is di�usively
reflected (first bounce) toward the hidden wall (x), where it reflects (second bounce) back
toward the visible wall. The third-bounce reflection at the visible wall (c) returns light in the
direction of the detector (⌦). A circular occluder is placed between the visible and hidden
walls, and partially obstructs light propagating between the visible and hidden walls.
wide field-of-view detection. For the derivation we assume that: the geometries of the hidden
wall and occluder are known; the occluders are opaque (nonreflecting and nontransmitting); the
visible wall is Lambertian with known reflectivity; and the background illumination reaching the
detector is known.
The m ⇥ m illumination grid on the visible wall is indexed with (i, j). The hidden wall is
discretized to n ⇥ n pixels indexed with (k, l). Let F be the hidden-wall’s reflectivity matrix, with
entry 0 Fkl 1 being the reflectivity value of the (k, l)th hidden-wall pixel. We use Yi j to denote
the average number of photons arriving at the detector from single-pulse illumination at grid point
(i, j), and Y to denote the m ⇥ m matrix whose i jth entry is Yi j . In the absence of background
light in three-bounce NLoS imaging, Yi j is linearly related to F as follows (Appendix A):
Yi j = Kp’k,l
A(i j)kl Fkl, (1)
where Kp is the average number of photons per transmitted laser pulse, and A(i j)kl , for fixed i, j, is
the klth entry of an n ⇥ n matrix A(i j)that is determined by the physics of light propagation and
the geometry of the surfaces involved. For 1 i, j m, Eq. (1) defines a linear system of m2
equations in the n2unknowns F that we wish to retrieve.
In practice, Y is not directly available. Even were it available, the robustness of estimating
F from Y would depend on the matrices A(i j). Indeed, high-fidelity inversion of Eq. (1) with
a finite-precision calculation requires that the A(i j)vary substantially with (i, j), i.e., that each
laser illumination point retrieves a new informative projection of the unknowns. When the space
between the visible and hidden walls is free of obstructions, however, the A(i j)matrices vary
Vol. 26, No. 8 | 16 Apr 2018 | OPTICS EXPRESS 9949

c b a
Grou
nd tr
uth
Reco
nstr
uctio
n Ra
w co
unts
0
0.2
0.4
0.6
0.8
1
200
250
300
350
400
0
0.2
0.4
0.6
0.8
1
Fig. 3. Role of the occluder’s shadow in NLoS imaging. The red-dashed square in the
ground-truth image indicates the hidden-wall area that is scanned by the occluder’s shadow
as the laser raster scans the visible wall. The blue-dashed circle in the ground-truth image
indicates the approximate occluder-shadow area for one `i j (see Visualization 2 ). (a) The
man-shaped pattern, placed in the upper-left quadrant of the hidden wall, is completely
scanned by the occluder’s shadow pattern as the laser scans the visible wall; with the aid
of the occluder, the hidden pattern is successfully reconstructed from the raw counts. (b)
The T-shaped pattern, placed in the upper-right quadrant of the hidden wall that is outside
of the shadow area, yields raw photon counts that fail to reconstruct the pattern owing to
the occluder’s shadow not scanning that quadrant. (c) Both the man-shaped pattern and the
T-shaped pattern are placed on the hidden wall, with only the man-shaped pattern being
scanned by the occluder’s shadow, so the man-shaped pattern is reconstructed successfully
while the T-shaped pattern is not.
only slightly and smoothly across di�erent grid points (i, j) [Fig. 1(b)]. Hence inverting Eq. (1)
results in poor reconstruction of the unknown reflectivity because the inversion is ill conditioned
[Fig. 1(d)].
In contrast, when an occluder is present in the space between the visible and hidden walls, the
matrices A(i j)in Eq. (1) become much more diverse [Fig. 1(c)], enabling much better imaging of
the hidden wall [Fig. 1(e)]. Intuitively, the occluder partially obstructs light propagation in the
hidden space, precluding Y contributions from some hidden-scene patches, thus making some
A(i j)entries vanish. Moreover, di�erent laser positions (i, j) and (i0, j 0) may be blocked from
illuminating di�erent portions of the hidden wall (see 1). Consequently, some A(i j)entries that
are zeros correspond to A(i0 j0)entries that are nonzero, and vice-versa, yielding the measurement
diversity needed for a much better conditioned inversion of Eq. (1).
A photon-number-resolving SPAD [23] will produce a Poisson-distributed number of photon
counts in response to an illumination pulse [24]. Currently available SPADs, however, are not
photon-number resolving: after detecting one photon they su�er a dead time [23, 24] whose
Vol. 26, No. 8 | 16 Apr 2018 | OPTICS EXPRESS 9950

duration is longer, in our experiment, than the duration of light returned in a single illumination
period. Furthermore, after three bounces, the probability of detecting a photon from a single
pulse is very low. So, in this low-flux regime, the probability that the SPAD does not detect a
photon from single-pulse illumination of the i jth grid point is:
P(i j)0 (F) = exp[�⌘(Yi j + Bi j)], (2)
where ⌘ is the SPAD’s quantum e�ciency, and Bi j is the background contribution to the light
illuminating the SPAD. Defining Ri j to be the number of photons detected from illuminating that
grid point with a sequence of N laser pulses, it follows that Ri j has a binomial distribution with
success probability 1 � P(i j)0 (F), i.e., [25]
Pr(Ri j ; F) =✓
NRi j
◆[1 � P(i j)
0 (F)]Ri j [P(i j)0 (F)]N�Ri j . (3)
4. Reconstruction algorithm
To reconstruct the hidden wall’s reflectivity matrix F from the m⇥m matrix, R, of photon counts,
we make use of the forward model from Eqs. (1)–(3). In particular, we seek a matrix F̂ that
maximizes the likelihood L(R; F) ⌘ Œi, j Pr(Ri j ; F) of F being the true reflectivity matrix, given
that R is the observed photon-count matrix. Significantly, the negative log-likelihood function
can be shown to be convex in F, and is thus easy to minimize. The optimization program is still
convex—and still easily solved—after we impose reflectivity’s nonnegativity constraint Fkl � 0,
and an additive penalty pen(F) chosen to ensure spatial correlation between the reflectivity
values of neighboring pixels while allowing abrupt reflectivity changes at the boundaries between
multipixel regions. In summary, we reconstruct the reflectivity matrix as the solution F̂ to the
convex optimization program
F̂ = arg minF : Fkl �0 {� log[L(R; F)] + � pen(F)} , (4)
for an appropriate choice of the regularization parameter �. We used the total-variation (TV)
semi-norm penalty function [26] and a specialized solver [27] to obtain F̂ from Eq. (4).
The regularization parameter � determines the balance between the two optimization targets:
decreasing the negative log-likelihood and promoting locally-smooth scenes with sharp boundaries.
In Fig. 4, we demonstrate the e�ect of varying � on the reconstructed reflectivity. In practice, we
choose the regularization parameter to obtain reasonably smooth images that do not seem overly
regularized.
5. Experiment
Figure 2 depicts the ⇠1-m scale imaging scene in our experiment. For illumination, we used a
repetitively-pulsed 640-nm laser (Picoquant LDH-640B), with sub-ns pulses, 40 MHz repetition
rate, and an average power of ⇠8 mW. A two-axis galvo (Thorlabs GVS012) was utilized to
raster scan the laser’s output over a grid of points (first bounce in Fig. 2) on a nearly-Lambertian
visible wall (white poster board, see its characterization in Appendix B). Light reflected from
the visible wall propagates to the hidden wall, where some is reflected back (second bounce) to
the visible wall. Finally, some of the second-bounce light that is reflected from the visible wall
(third bounce) is collected by a SPAD detector (MPD-PDM with quantum e�ciency ⇠0.35 at
640 nm). We placed an interference filter (Andover) centered at 640 nm with a 2 nm bandwidth in
front of the SPAD to suppress background light. The occluder is a nonreflecting black circular
patch. In the experiment, the two side walls inside the room were covered with black curtains so
that they too are nonreflecting. Note that our forward model can easily take the side walls into
Vol. 26, No. 8 | 16 Apr 2018 | OPTICS EXPRESS 9951

0
0.2
0.4
0.6
0.8
1
0.005 0.025 0.05 0.25
0.75 2.5 5 25
Fig. 4. Reconstruction results with di�erent values of the regularization parameter �. We
demonstrate reconstruction according to Eq. (4) with varying values for the regularization
parameter�, as indicated on the bottom of the figures. Higher� values promote reconstructions
with larger regions of near-uniform reflectivity values, whereas smaller � values produce
more detailed but noisier images. In our reconstructions, we chose a � value that does not
severely distort the image; here the preferred value is � = 0.75.
consideration were they reflecting. During measurements, we turned o� all ambient room light to
minimize the background level.
The focus of the experiment is to utilize the collected third-bounce light to reconstruct the
hidden-wall’s reflectivity pattern without use of ToF infomation. Therefore it is important to
avoid detecting the first-bounce light that will be much stronger than the third-bounce light. We
took two initial steps to minimize first-bounce photon detections. First, as shown in Fig. 2, we
oriented the SPAD such that its field of view did not overlap the part of the visible wall that was
scanned by the laser. Second, we inserted an opaque screen (not shown in Fig. 2) to block the
direct line of sight between the illuminated part of the visible wall and the SPAD. In testing,
however, we found that there was still a substantial number of photon detections from residual
first-bounce light, which we could determine from their time delays relative to the laser pulses’
emission times. These detections were mostly due to laser light scattered from the two galvo
mirrors that illuminated part of the visible wall within the SPAD’s field of view. So, because
the visible wall is in direct line of sight of the imaging equipment—and hence its location can
be easily and accurately estimated—we further suppressed first-bounce photon detections by
the following post-processing procedure. We used the time-resolved (TR) information that is
automatically captured by the SPAD to set a gated timing window that excludes first-bounce
detections but whose duration is long enough to encompass all possible third-bounce detections,
as indicated in the measurements shown in Fig. 5. As a result, no TR information related to the
third-bounce photons is used in our measurements and scene reconstructions. In the future, with
better galvo mirrors and a single-photon-sensitive CCD detector, we should be able to perform
occlusion-based NLoS imaging with neither the need for nor the possibility of ToF-enabled
suppression of first-bounce photon detections.
6. Experimental results
We report experimental results obtained from a meter-scale environment in which the distance
between the detector and the visible wall is ⇠1.5 m and a circular occluder of diameter ⇠6.8 cm
is positioned roughly midway between the visible and hidden walls, which are separated by ⇠1 m.
A ⇠0.4 m ⇥ 0.4 m reflectivity pattern was mounted on the upper-left quadrant of the ⇠1 m ⇥ 1 m
Vol. 26, No. 8 | 16 Apr 2018 | OPTICS EXPRESS 9952

signal from visible wall (1st bounce)
signal from hidden wall (3rd bounce)
Gate ON
Gate OFF Gate OFF
Time (ns)
Counts
Fig. 5. Time-resolved SPAD measurements showing the gated timing window used for post-
selecting third-bounce photon detections while suppressing first-bounce photon detections.
The gate-o� period covers detection times of first-bounce photons and the ⇠6 ns duration
of the gate-on period is long enough to capture all third-bounce photon detections. In our
experiments, only the number of detected photons in gate-on windows were recorded to
form the raw-count images.
hidden wall to ensure that the pattern is properly scanned by the occluder’s shadow as the laser
raster scans the visible wall (see Fig. 3 and Visualization 2 ). We performed an initial calibration
of the background levels {Bi j} that was then used for all subsequent experiments. We note that
the need for background calibration can be avoided with better experimental equipment (see
Appendix B). The occluder’s shape and position are assumed to be known for the purpose of
scene reconstruction. From the known geometry, the matrix A(i j)can be determined. Finally, we
chose m = 100 and n = 100 for our measurements.
First, we validate our occluder-assisted NLoS imaging method by reconstructing di�erent
reflectivity patterns on the hidden wall. These results are summarized in Figs. 6(a)–6(d). Four
reflectivity patterns were placed on the hidden wall, as shown in the first row of Figs. 6(a)–6(d).
The laser’s dwell time at each raster-scanned point was set so that N = 7.12 ⇥ 105pulses were
sent, resulting in ⇠276 detected photons per pixel (PPP) on average. For each reflectivity pattern,
a matrix of 100⇥100 raw counts was collected, as given in the middle row of Figs. 6(a)–6(d). The
reflectivity patterns on the hidden wall were then reconstructed using our algorithm for solving
Eq. (4), successfully revealing their fine details, as seen in the bottom row of Figs. 6(a)–6(d).
To quantify the photon e�ciency and fidelity of our method, we varied the dwell time per laser
illumination point (which determines the overall acquisition time) and tracked reconstruction
performance as a function of the empirical average PPP, as shown in Figs. 7 and 8. We measure
the reconstruction fidelity by the root-mean-square error (RMSE) in the reconstructed reflectivity
F̂,
RMSE(F̂,F) =
vt1n2
n’k=1
n’l=1
�Fkl � F̂kl
�2, (5)
where F is the true reflectivity pattern as determined from measurements in the high photon-count
Vol. 26, No. 8 | 16 Apr 2018 | OPTICS EXPRESS 9953

limit. It is evident from Fig. 7 that reconstruction fidelity for our binomial-distribution-based
likelihood method does not degrade much (remains below 0.05) as the average PPP decreases
from ⇠1100 to ⇠100. Figure 7 also shows RMSE for the Gaussian-distribution-based likelihood
method employed in [20]. We see that the binomial-likelihood method’s photon e�ciency is
substantially better than that of the Gaussian-likelihood method: the latter requires at least ⇠1100
detected PPP to achieve a fidelity similar to what the former realized with only ⇠69 detected PPP.
This behavior is mainly due to the mismatched noise model in the standard Gaussian-likelihood
method, which presumes the noise to be additive, signal independent, and Gaussian distributed,
whereas in the low photon-count regime without photon-number resolution it is really signal
dependent and binomial distributed.
c b d a
Grou
nd tr
uth
Raw
coun
ts
Reco
nstr
uctio
n
0
0.2
0.4
0.6
0.8
1
200
250
300
350
400
0
0.2
0.4
0.6
0.8
1
Fig. 6. Experimental results on the recovery of di�erent hidden-wall reflectivity patterns,
(a)–(d). First row: ground truth patterns on the hidden wall; second row: raw photon counts
for 100 ⇥ 100 raster-scanned laser positions; third row: reconstructions in the presence of
the occluder, based on solving Eq. (4), showing that detailed scene features are successfully
recovered.
Finally, we quantify the e�ect of occluder size [Figs. 9(a)–9(c)] and the limits of achievable
spatial resolution [Figs. 9(d)–9(f)]. In Figs. 9(a)–(c), we used our system to image the reflectivity
pattern of Fig. 6(a) using circular occluders, whose diameters ranged from 15.8 cm to 4.4 cm,
while keeping other experimental parameters unchanged. The results show that a small (large)
occluder sharpens (blurs) the image, similar to conventional pinhole imaging. In Figs. 9(d)–9(f),
we fixed the diameter of the circular occluder at 6.8 cm and reconstructed a hidden-wall reflectivity
pattern consisting of two bars with varying separation. With this occluder we see that our system
provides ⇠4 cm spatial resolution. Furthermore, the distance between the occluder and hidden
wall will also a�ect the performance of the reconstruction. As shown in Figs. 3(a)– 3(c), when
the distance between the occluder and the hidden wall decreases (increases) its shadow’s size
and field of view will decrease (increase), hence the resulting reconstruction will have better
(worse) spatial resolution but smaller (larger) field of view. The distance between the visible and
hidden walls also a�ects the reconstruction. Decreasing (increasing) the distance between the two
walls improves (degrades) the conditioning of the forward model’s A matrix, which improves
Vol. 26, No. 8 | 16 Apr 2018 | OPTICS EXPRESS 9954

0 200 400 600 800 1000 1200 PPP
0
0.1
0.2
0.3
0.4 R
M S
E
Gaussian Binomial
0 0.2
0.4
0.6
0.8 1
Fig. 7. Root-mean-square error (RMSE) and reconstruction results (insets) with di�erent
numbers of detected photons per pixel (PPP). The RMSE of our binomial-likelihood method
remains below 0.05 with >69 detected PPP, whereas the Gaussian-likelihood method
employed in [20] requires at least ⇠1100 detected PPP to achieve similar performance.
(degrades) scene reconstruction. See Sec. IV.B in ref. [20] for more about this point.
7. Discussion
We have assumed throughout that the occluder’s location was known and that it was nonreflecting.
These assumptions may be relaxed. In particular, the location of a nonreflecting occluder may be
obtained using a blind deconvolution method [20], in which the occluder and the scene hidden
behind it are reconstructed jointly. The viability of this approach is suggested by the fact that the
occluder can be localized from the raw counts, as shown in Fig. 10. Moreover, if the occluder has
nonzero reflectivity, its contribution to the raw photon counts can be modeled using the principles
employed in our forward model and incorporated into the blind deconvoloution procedure.
Our work can be improved in the following directions. First, the raster-scanning system can
be replaced by a non-scanning laser together with a SPAD camera [28] or an intensified CCD
for measurement. Such a system should be capable of tracking the position of a moving target
in the hidden space [16]. Second, the experiment can be operated at an appropriate wavelength
outside of the visible range, such as 1550 nm, in order to perform NLoS imaging in the presence
of ambient light. Finally, one can combine ToF measurements [18] with our approach to obviate
the need for the prior information about the occluder, thus providing a full reconstruction of the
hidden space.
In conclusion, we have demonstrated a framework for photon-e�cient, occluder-facilitated
NLoS imaging. Our results may ultimately lead to new imaging methodologies capable of
opportunistically exploiting diverse features of the environment—including, but not limited to,
simple occluders—and thus pave the way to NLoS imaging in a wide variety of applications.
Appendices
A. Theoretical details
Light propagation model Here we provide details for the forward model in Eq. (1). The
ray-optics propagation model we use for third-bounce light is that from [20], which we present in
detail for ease of reference. Unlike [20], which assumes additive, signal-independent, Gaussian
Vol. 26, No. 8 | 16 Apr 2018 | OPTICS EXPRESS 9955

17 Bi
nom
ial
Gaus
sian
69 138 276
550 1100 1650 3438
17 69 138 276
550 1100 1650 3438
0
0.2
0.4
0.6
0.8
1
0
0.2
0.4
0.6
0.8
1
Fig. 8. Reflectivity reconstructions with di�erent numbers of detected photons per pixel
(PPP). We compare the binomial-likelihood algorithm (Eq. (4)) and the Gaussian-likelihood
algorithm [20] for di�erent numbers of average detected PPP, ranging from 17 to 3438 as
indicated on the bottom of each figure. The photon e�ciency of the binomial-likelihood
method is far superior to that of the Gaussian-likelihood method, with the latter requiring at
least ⇠1100 PPP to achieve reconstructions comparable to those of the former with ⇠69 PPP.
In the low-photon detection regime, PPP< 276, the Gaussian-likelihood method fails to
reconstruct the details of the reflectivity image. Here the regularization parameter is fixed at
0.75, which causes the slight di�erence between Binomial-likelihood and Gaussian-likelihood
at high PPP values.
noise, our forward model accurately captures the noise statistics for SPAD detection in the
low-photon-count regime.
Light propagates from the laser, located at position ⇤, until it reaches the detector, located
at position ⌦, while accounting for a three-bounce propagation path. Our goal is to reconstruct
the reflectivity function f (x), for x 2 S, where S is a two-dimensional parameterization of the
hidden wall.
Figure 2 illustrates a three-bounce trajectory of the form ⇤! `i j ! x ! c ! ⌦, where `i jis the i jth position in the laser’s illumination grid, x is a point on the hidden wall, and c is a point
on the visible wall that is in the SPAD’s field of view. For single-pulse illumination of `i j , the
average number of photons following this trajectory that arrive at the SPAD is
Kp f (x)G⇤,`i j,x,c,⌦ dx dc d⌦
k`i j � xk2kx � ck2kc �⌦k2 , (6)
where Kp is the average number of photons per pulse emitted by the laser, and dx, dc, d⌦ are
di�erential areas. This expression accounts for the inverse-square-law losses experienced in
Vol. 26, No. 8 | 16 Apr 2018 | OPTICS EXPRESS 9956

2 cm
4
cm
8 cm
15.8
cm
6.8
cm
4.4
cm
a
b
c
d
e
f
Raw counts Reconstruction Raw counts Reconstruction
0
0.2
0.4
0.6
0.8
1
0
0.2
0.4
0.6
0.8
1
0
0.2
0.4
0.6
0.8
1
0
0.2
0.4
0.6
0.8
1
0
0.2
0.4
0.6
0.8
1
0
0.2
0.4
0.6
0.8
1
200
250
300
350
400
200
250
300
350
400
200
250
300
350
400
100
125
150
175
200
100
125
150
175
200
100
125
150
175
200
Fig. 9. (a)–(c), Reconstructions of the Fig. 6(a) reflectivity pattern obtained using circular
occluders with diameters of 15.8 cm, 6.8 cm and 4.4 cm. A small (large) occluder sharpens
(blurs) the image. (d)–(f), Reconstructions of two-bar reflectivity patterns with bar separations
of 2 cm, 4 cm and 8 cm that were obtained using a 6.8-cm-diameter circular occluder. Our
system achieves 4 cm spatial resolution.
free-space light propagation from `i j to x, from x to c, and from c to ⌦, as well as the linear
scaling by f (x) that results from reflection at x. The geometric factor G⇤,`i j,x,c,⌦ combines the
Lambertian bidirectional reflectance distribution functions (BRDFs) associated with the di�use
reflections at the visible wall and the hidden wall, and is given by
G⇤,`i j,x,c,⌦ ⌘ cos(⇤ � `i j, n`i j ) cos(x � `i j, n`i j )⇥ cos(x � `i j, nx) cos(x � c, nx) cos(x � c, nc) cos(c �⌦, nc) , (7)
where n`i j , nx, nc are the surface normals at `i j, x, c, respectively, and cos(a, b) is the cosine of
the angle between the vectors a and b.
For single-pulse illumination of `i j , we use Yi j to denote the average number of photons
arriving at the detector from three-bounce trajectories. Deriving an expression for Yi j entails
summation over all such paths. In particular, this means summing over: (i) all x 2 S(`i j, c), where
S(`i j, c) is the section of the hidden wall S that has an unoccluded line of sight to both `i j and
c; (ii) all c 2 C, where C is a parameterization of the section of the visible wall that is in the
SPAD’s field of view; and (iii) all points in D, the SPAD detector’s photosensitive region. With
these definitions we then have:
Yi j = Kp
πS(`i j,c)
dxπC
dcπD
d⌦ f (x)G⇤,`i j,x,c,⌦
k`i j � xk2kx � ck2kc �⌦k2 , (8)
where Eq. (8)’s spatial integrations account for all possible three-bounce trajectories from the
Vol. 26, No. 8 | 16 Apr 2018 | OPTICS EXPRESS 9957

a b c
d e f
(24, 2, 44) (27, 2, 44) (27, 17, 44)
(24, 2, 40) (24, 2, 44) (24, 2, 48)
Fig. 10. Raw detected-count measurements with a 15.8-cm-diameter occluder placed at
di�erent positions. The real location (X,Y, Z) (cm) of the occluder is indicated on the top
of each figure. In (a)–(c), we fixed the position of the occluder on the Z axis and shifted it
along the X and Y axes: the center of the rings reveals the (X,Y ) position of the occluder. In
(d)–(f), we fixed the position of the occluder on the X and Y axes and shifted it along the
Z axis: the size of the rings reveals the Z-axis position of the occluder. These preliminary
measurements suggest that occluder position may be localized from raw-count data.
laser to the detector. This result can be simplified as follows:
Yi j = Kp
πS
dx f (x)πC
dcπD
d⌦1S(`i j,c)(x)G⇤,`i j,x,c,⌦
k`i j � xk2kx � ck2kc �⌦k2
= Kp
πS
dx f (x)A(i j)(x) , (9)
where 1{x0 }(x) is the indicator function (i.e., it equals 1 if and only if x =2 {x0} and is 0 otherwise),
and for fixed i, j we have defined
A(i j)(x) ⌘πC
dcπD
d⌦1S(`i j,c)(x)G⇤,`i j,x,c,⌦
k`i j � xk2kx � ck2kc �⌦k2 . (10)
Equation (9) is specified in terms of the continuous variable x. In what follows, it will be
convenient to discretize the coordinate system on the hidden wall S by introducing an n ⇥ n grid
indexed by (k, l). We then have that A(i j)(x) becomes A(i j)kl and f (x) becomes Fkl . Making these
substitutions in (9) we obtain the discrete version of the forward model that appeared in Eq. (1):
Yi j = Kp’k,l
A(i j)kl Fkl . (11)
Shadow function Equations (10) and (11) show that the presence of an occluder only a�ects
Yi j through its impact on S(`i j, c), i.e., the patch on the hidden wall that has unobstructed lines of
Vol. 26, No. 8 | 16 Apr 2018 | OPTICS EXPRESS 9958

sight to both `i j and c. To better understand this connection between the occluder and S(`i j, c),we introduce a binary shadow function ⇥(x, y) that indicates whether point x on the hidden wall
and point y on the visible wall are visible to each other:
⇥(x, y) =⇢
1, unobstructed line of sight between x and y,
0, obstructed line of sight between x and y.
(12)
With this definition we have S(`i j, c) =�x 2 S : ⇥(x, `i j)⇥(x, c) = 1
, i.e., it is the subset of
hidden-wall positions S that satisfy both ⇥(x, `i j) = 1 and ⇥(x, c) = 1. Note that S(`i j, c) and
S(`i0 j0, c) di�er on hidden-wall patches for which the occluder blocks light from `i j but not from
`i0 j0 or vice versa.
Informative measurements Our experiment raster scans the grid points {`i j} on the visible wall
and detects third-bounce photons reflected from a large portion of that wall. The informativeness
of these measurements stems from the diversity of the coe�cients A(i j)kl . In the absence of an
occluder, we haveS(`i j, c) = S for all `i j and c. From (10) we then see that the dependence of A(i j)kl
on i, j originates from the product of two smoothly-varying functions—the inverse-square-law
term k`i j � xkl k�2and the geometric function G⇤,`i j,xkl,c,⌦—that yield smooth variations in
A(i j)kl as (i, j) changes. In the presence of an occluder, however, the impact of nontrivial shadow
functions in determining S(`i j, c) makes A(i j)kl vary more abruptly with (i, j) changes, greatly
increasing the informativeness of the measurements.
To demonstrate this e�ect, we rearrange
�Yi j
as an m2
-dimensional column vector y, {Fkl} as
an n2-dimensional column vector f, and {A(i j)} as an m2 ⇥ n2
-dimensional matrix A such that
Eq. (1) for 1 i, j m gets combined into
y = Af. (13)
With this rearrangement we can evaluate the informativeness of the measurements by analyzing
the spectral properties of A. Toward that end, Fig. 11 shows the singular values of A for two
experimental setups. The first setup corresponds to an unoccluded scene, whereas the second
setup corresponds to an occluded scene, in which a black circular patch has been inserted
between the visible and hidden walls. It is evident from these singular values that the occluded
measurements are substantially more informative, suggesting that the presence of the occluder
will enable higher-fidelity reconstruction of the hidden-wall’s reflectivity pattern.
Measurement statistics The laser illuminates position `i j with N pulses before it addresses
the next grid point on the visible wall. Each pulse that illuminates `i j results in an average
of Yi j third-bounce photons arriving at the detector’s location ⌦. In this low-flux regime the
number of detections registered by a photon-number resolving detector from illumination of
`i j by a single pulse is Poisson distributed, with mean ⌘(Yi j + Bi j), where ⌘ is the detector’s
quantum e�ciency, and Bi j is the average number of background-light photons arriving during a
single-pulse measurement interval (see details below). A SPAD detector, however, is not number
resolving; it su�ers a dead time after making a single detection that, for our experiment, precludes
more than one detection in a single-pulse measurement interval. In this case, each optical pulse
can yield either a 0 count or 1 count, and these events occur with probabilities P(i j)0 (F) and
1 � P(i j)0 (F), respectively, where
P(i j)0 (F) = exp[�⌘(Yi j + Bi j)] ⇡ 1 � ⌘(Yi j + Bi j) , (14)
The equality in Eq. (14) comes from the Poisson distribution. The approximation for that Poisson
probability is due to the enormous attenuation incurred in three di�use reflections, which makes
Vol. 26, No. 8 | 16 Apr 2018 | OPTICS EXPRESS 9959

0 500 1000 1500 2000 2500index
10-20
10-15
10-10
10-5
100
Sing
ular
val
ue
occludedunoccluded
Fig. 11. Comparing the informativeness of occluded and unoccluded measurements. We nu-
merically simulated the setup of Fig. 2 and evaluated the informativeness of the measurements
with and without an occluder from the A matrix’s singular values {�}. In our simulations,
the laser illuminates a 50 ⇥ 50 grid on the visible wall, and the hidden wall is discretized
to a 50 ⇥ 50 grid. The singular values of the corresponding 2500 ⇥ 2500 A matrix were
calculated for an occluded setup (blue dashed curve) and an unoccluded setup (red solid
curve). The singular values of the occluded A matrix are substantially higher than those of
the unoccluded matrix, suggesting that measurements in the occluded setup will be much
more informative.
⌘Yi j ⌧ 1, and the pre-detection optical filtering used to ensure that ⌘Bi j ⌧ 1, which prevents
SPAD counts from occurring in every single-pulse measurement interval. The F dependence of
P(i j)0 (F) arises from the Yi j term, see Eq. (1).
The statistical independence of the photon counts from di�erent laser pulses now makes Ri j ,
the total photon count from the N pulses that illuminate `i j , a binomial random variable with
success probability 1 � P(i j)0 (F), i.e., [25]
Pr(Ri j ; F) =✓
NRi j
◆[1 � P(i j)
0 (F)]Ri j [P(i j)0 (F)]N�Ri j . (15)
Using this binomial distribution for the count statistics, and dropping terms that are independent
of F, we get the following negative log-likelihood function for the raw count matrix R given the
reflectivity matrix F:
� log[L(R; F)] = � log✓Œi, j
Pr(Ri j ; F)◆= �Õ
i
Õj
log⇥Pr(Ri j ; F)
⇤
=Õi
Õj
⇢(N � Ri j)
⌘Kp
Õk,l
A(i j)kl Fkl
�� Ri j log
⌘Kp
Õk,l
A(i j)kl Fkl + ⌘Bi j
��, (16)
where the first equality in (16) follows from the statistical independence of the shot noises
generated by di�erent laser pulses.
B. Experimental details
Vol. 26, No. 8 | 16 Apr 2018 | OPTICS EXPRESS 9960

Visible wall characterization We used a white poster board as a near-Lambertian reflecting
surface to serve as the visible wall in our NLoS imaging experiment of Fig. 2. We used a 635-nm
laser to illuminate the white board at two di�erent incident angles and measured its reflected
power at various viewing angles. The results are displayed in Fig. 12, showing that the white
poster board is indeed nearly Lambertian.
Background light In Fig. 13, we show results of background-light detection over a long
data-acquisition time that we used to calibrate Bi j , the average number of background photons
arriving at the detector in a single-pulse measurement interval. For this measurement, the
reflectivity pattern on the hidden wall was replaced with a black surface, a total of N = 3.56⇥ 107
laser pulses were transmitted at each laser point `i j , and the third-bounce photons were detected
by the SPAD. Note that once performed this calibration applies to all subsequent measurements:
in post-processing, we scale these background noise counts according to the dwell time used.
The nonuniformity of the background counts is mainly due to scattering from the raster-scan
galvo mirrors and to SPAD afterpulsing originating from detections of those first-bounce photons.
Galvo-related background counts could be avoided with better scanning mirrors.
20º
ϕ ϕ
Fig. 12. Near-Lambertian reflectance behavior of white poster-board visible wall. The blue
(red) data points correspond to measurements made with the setup in the blue (red) inset: a
laser illuminated the visible wall at normal incidence (20
�o�set from normal incidence),
and a detector recorded the power reflected at di�erent viewing angles. The green line is the
theoretical cosine curve for a perfect Lambertian surface. We find that the visible wall has
⇠80% reflectivity and is nearly Lambertian except for a small specular component when the
viewing angle is perpendicular to the surface. We also performed this characterization for
the patterns on the hidden wall, and found that the Lambertian property of those patterns
was similar to that of the visible wall.
Vol. 26, No. 8 | 16 Apr 2018 | OPTICS EXPRESS 9961

Fig. 13. Results of long acquisition time background-light measurement used to calibrate Bi j .
The reflectivity pattern on the hidden wall was replaced with a black surface. A total of 35.6
million laser pulses were transmitted at each laser point `i j on the 100 ⇥ 100 illumination
grid, and the third-bounce counts were recorded by the SPAD. The nonuniformity is mainly
due to scattering from the raster-scan galvo mirrors and SPAD afterpulsing that arises from
detections of those first-bounce photons.
Funding
Defense Advanced Research Projects Agency (DARPA) REVEAL Program Contract No. HR0011-
16-C-0030.
Acknowledgments
The authors thank Changchen Chen for assistance with figure preparation, Connor Henley for
the measurements reported in Fig. 11, and William T. Freeman and Vivek K Goyal for helpful
discussions.
Vol. 26, No. 8 | 16 Apr 2018 | OPTICS EXPRESS 9962