Embed Size (px)
Citation preview

Computational Nanotechnology and Molecular Engineering Computational Nanotechnology and Molecular Engineering Workshop, Caltech, Pasadena, January 5Workshop, Caltech, Pasadena, January 5--17, 200417, 2004
11
Andrés Jaramillo-BoteroPontificia Universidad JaverianaCali, Colombia
Rigid-Body Nano-Manipulator Design Criteria for Reduced Constrained Dynamics

Computational Nanotechnology and Molecular Engineering Computational Nanotechnology and Molecular Engineering Workshop, Caltech, Pasadena, January 5Workshop, Caltech, Pasadena, January 5--17, 200417, 2004
22
© A
ndré
s Ja
ram
illo-
Bote
ro, 20
03
ObjectiveObjective
Design a 3-6DOF nano-scale rigid-body manipulator with implicit simplified dynamic complexity, to:
1. Reduce real-time control requirements. Increased ∆t, decoupled and/or invariant Articulated Body Inertia (ABI), Single Input Single Output (SISO) control, and/or,
2. Reduce molecular modeling and simulation requirements (rigid-body model, scalable algorithms)
Other criteria: speed, dexterity, repeatability, payload, compliance motion, reachable workspace.PREMISE: Macroscopic counterparts are not good a starting pointPREMISE: Macroscopic counterparts are not good a starting point

Computational Nanotechnology and Molecular Engineering Computational Nanotechnology and Molecular Engineering Workshop, Caltech, Pasadena, January 5Workshop, Caltech, Pasadena, January 5--17, 200417, 2004
33
© A
ndré
s Ja
ram
illo-
Bote
ro, 20
03
Motion ControlMotion Control
SimulationSimulation
Robotics IntroRobotics Intro
Inverse Kinematics
Forward Kinematics
Element and Joint Element and Joint ParametersParameters
Position and Orientation of End-Effector
Joint Angles and Displacements
Inverse Dynamics
Element and Joint Element and Joint Parameters (mass)Parameters (mass)
Kinematics Parameters (trajectory)
Effective Forces
Kinematics Dynamics
End-Effector
Joints
Elements
Base
5 Degree of 5 Degree of Freedom Freedom Spatial Robot Spatial Robot Manipulator, Manipulator, Mitsubishi Mitsubishi RVRV--M1M1
Forward Dynamics (EOM)
Computational Nanotechnology and Molecular Engineering Computational Nanotechnology and Molecular Engineering Workshop, Caltech, Pasadena, January 5Workshop, Caltech, Pasadena, January 5--17, 200417, 2004
44
© A
ndré
s Ja
ram
illo-
Bote
ro, 20
03
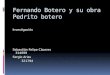
Examples: Puma 560Examples: Puma 560Coupled, configuration dependent
Jaramillo-Botero, A. “Design Criteria for Simplified Robot Dynamics” Epiciclos Magazine, 2002
θ1
θ2
θ3
θ4,5,6
Puma Robot, Unimation Inc.
Computational Nanotechnology and Molecular Engineering Computational Nanotechnology and Molecular Engineering Workshop, Caltech, Pasadena, January 5Workshop, Caltech, Pasadena, January 5--17, 200417, 2004
55
© A
ndré
s Ja
ram
illo-
Bote
ro, 20
03
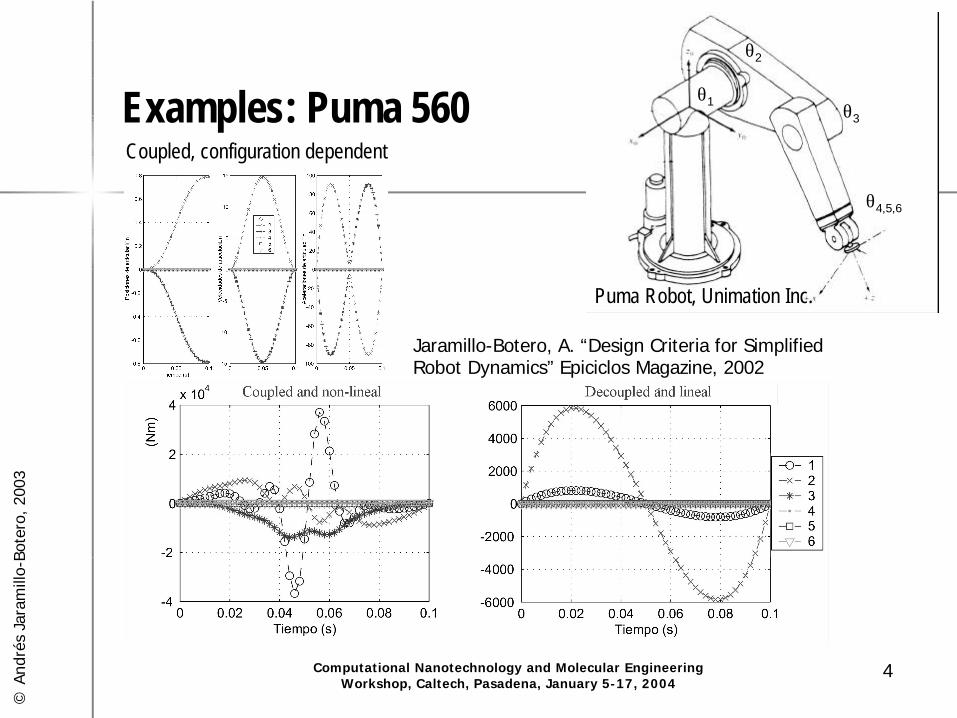
Examples: Stewart PlatformExamples: Stewart Platform
fineMotion970116.pdb
Highly Coupled, low dexterity, configuration dependent, reduced workspace, actuators, good payload
Molecular Robot: Stewart Platform (2,596 atoms). Eric Drexler.Macroscopic Stewart Platform Robot

Computational Nanotechnology and Molecular Engineering Computational Nanotechnology and Molecular Engineering Workshop, Caltech, Pasadena, January 5Workshop, Caltech, Pasadena, January 5--17, 200417, 2004
66
© A
ndré
s Ja
ram
illo-
Bote
ro, 20
03
Constrained RigidConstrained Rigid--Body Molecular DynamicsBody Molecular Dynamics
nn Simplified description and Simplified description and analysis analysis –– implicit constraints implicit constraints
nn Study conformations and Study conformations and rigidrigid--body dynamics (system body dynamics (system partitioned in rigidpartitioned in rigid--bodies bodies connected by hinges)connected by hinges)
nn EOM in internal coordinates EOM in internal coordinates nn Dense Mass OperatorDense Mass Operatornn IncreasedIncreased timetime--stepstep
Pi,i+1
Computational Nanotechnology and Molecular Engineering Computational Nanotechnology and Molecular Engineering Workshop, Caltech, Pasadena, January 5Workshop, Caltech, Pasadena, January 5--17, 200417, 2004
77
© A
ndré
s Ja
ram
illo-
Bote
ro, 20
03
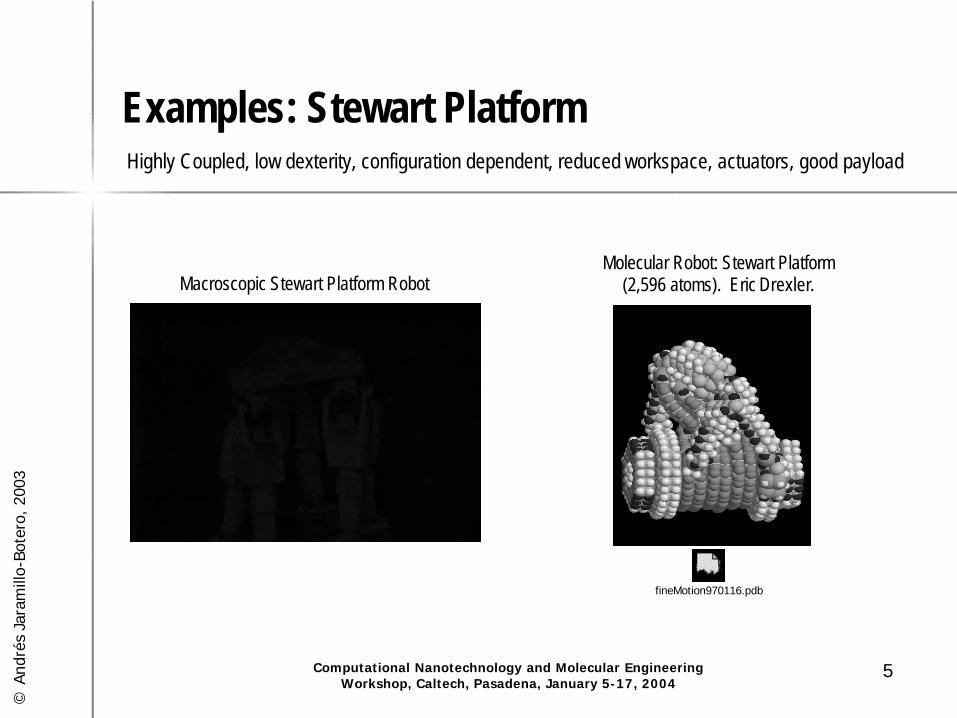
Equations of Motion Equations of Motion –– EOM EOM (Internal Coordinates)(Internal Coordinates)
MicrocanonicalMicrocanonical EnsembleEnsemble (NVE)(NVE)
Where, from NewtonWhere, from Newton--Euler dynamics using spatial operators,Euler dynamics using spatial operators,
( ) ( ),T M Cq q q q q= +&& & &
( ) ( )1 ,M T Cq q q q q− − = & & &&
T TM H I Hr r=( )T T T TC H I H I H Hr r r r = + + & &&
Mathiowetz, Jain, Karasawa, Goddard, NEIMO, [94]Fijany, Cagin, Jaramillo-Botero, Goddard, MCFA , [96]
TextJ F+
In contact with environment
Computational Nanotechnology and Molecular Engineering Computational Nanotechnology and Molecular Engineering Workshop, Caltech, Pasadena, January 5Workshop, Caltech, Pasadena, January 5--17, 200417, 2004
88
© A
ndré
s Ja
ram
illo-
Bote
ro, 20
03
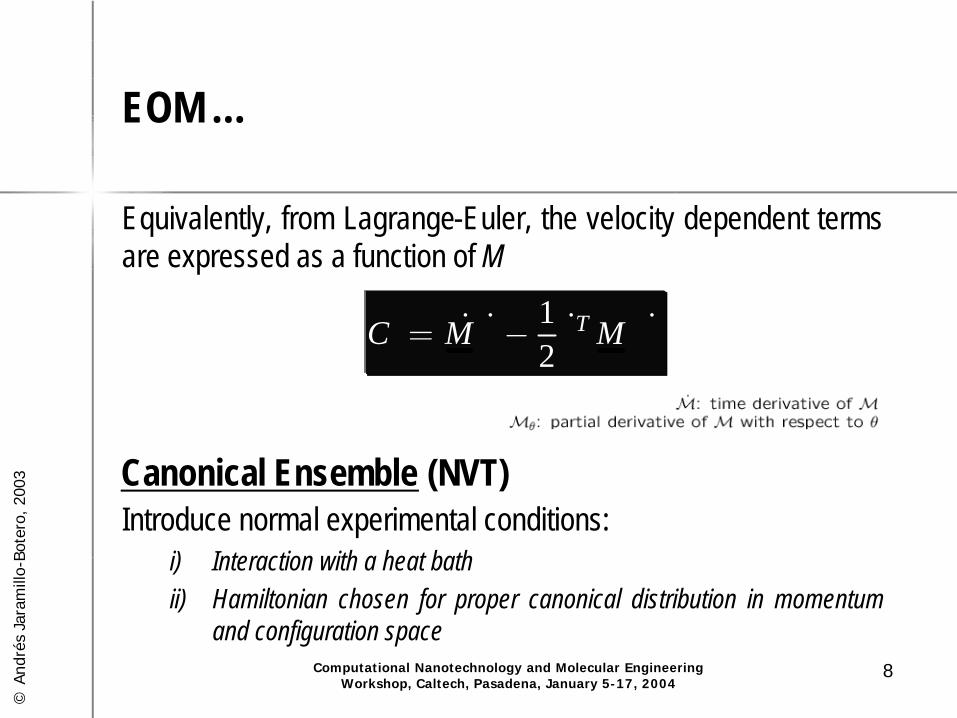
EOM …EOM …
Equivalently, from LagrangeEquivalently, from Lagrange--Euler, the velocity dependent terms Euler, the velocity dependent terms are expressed as a function of are expressed as a function of MM
12
TC M Mqq q q= −& & & &
Canonical EnsembleCanonical Ensemble (NVT)(NVT)Introduce normal experimental conditions:Introduce normal experimental conditions:
i)i) Interaction with a heat bathInteraction with a heat bathii)ii) Hamiltonian chosen for proper canonical distribution in momentumHamiltonian chosen for proper canonical distribution in momentum
and configuration spaceand configuration space

Computational Nanotechnology and Molecular Engineering Computational Nanotechnology and Molecular Engineering Workshop, Caltech, Pasadena, January 5Workshop, Caltech, Pasadena, January 5--17, 200417, 2004
99
© A
ndré
s Ja
ram
illo-
Bote
ro, 20
03
Extended EOM Extended EOM –– Canonical NewtonCanonical Newton--HooverHoover
Where,Where,
EOM same form as EOM same form as microcanonicalmicrocanonical, except friction term and , except friction term and nonbondnonbond force gradient,force gradient,
( ) ( ) ( ),H HT M Cq q q q q= +&& &
( )12
NBTH XC M MMqq x q qq q Φ= − + +& & & &&
21 1s B
TTx t = −
&
NoséNosé:: introduces an additional coordinate variable introduces an additional coordinate variable (virtual time(virtual time--scalingscaling, s) and conj., s) and conj.HooverHoover: real: real--time explicit by transforming time explicit by transforming Nosé’sNosé’s EOMEOM
Friction

Computational Nanotechnology and Molecular Engineering Computational Nanotechnology and Molecular Engineering Workshop, Caltech, Pasadena, January 5Workshop, Caltech, Pasadena, January 5--17, 200417, 2004
1010
© A
ndré
s Ja
ram
illo-
Bote
ro, 20
03
Underlying AssumptionUnderlying Assumption
nn It is known from the structure of It is known from the structure of MM that it only depends on the that it only depends on the kinematics of the manipulator arm and mass properties of its kinematics of the manipulator arm and mass properties of its individual links.individual links.
nn It then follows, from the established EOM for both the It then follows, from the established EOM for both the microcanonicalmicrocanonical and canonical forms that a decoupled (i.e. and canonical forms that a decoupled (i.e. diagonal) form of diagonal) form of MM and/or configuration invariant form of and/or configuration invariant form of MMwould greatly simplify the complexity of the systems dynamicswould greatly simplify the complexity of the systems dynamics
T TM H I Hr r=
Computational Nanotechnology and Molecular Engineering Computational Nanotechnology and Molecular Engineering Workshop, Caltech, Pasadena, January 5Workshop, Caltech, Pasadena, January 5--17, 200417, 2004
1111
© A
ndré
s Ja
ram
illo-
Bote
ro, 20
03
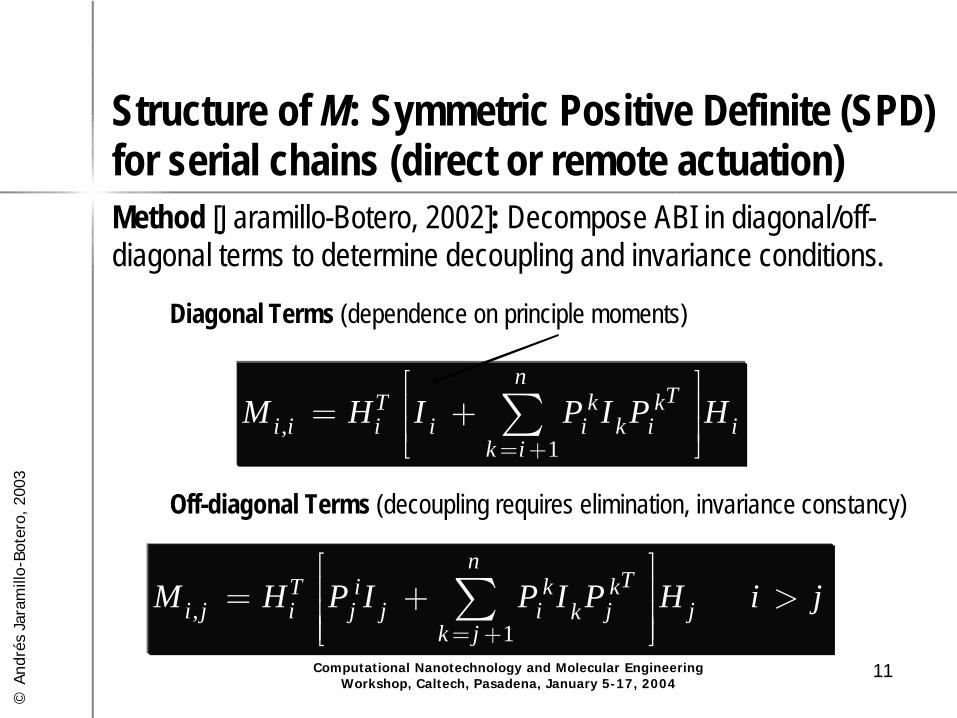
Structure of Structure of MM: Symmetric Positive Definite (SPD) : Symmetric Positive Definite (SPD) for serial chains (direct or remote actuation)for serial chains (direct or remote actuation)Method Method [Jaramillo[Jaramillo--BoteroBotero, 2002], 2002]: : Decompose ABI in diagonal/offDecompose ABI in diagonal/off--diagonal terms to determine decoupling and invariance conditionsdiagonal terms to determine decoupling and invariance conditions..
Diagonal TermsDiagonal Terms (dependence on principle moments)(dependence on principle moments)
OffOff--diagonal Termsdiagonal Terms (decoupling requires elimination, invariance constancy)(decoupling requires elimination, invariance constancy)
,1
n TT k ki i i i i i ik
k iM H I P I P H
= +
= + ∑
,1
n TT i k ki j i j j i j jk
k jM H P I P I P H i j
= +
= + > ∑

Computational Nanotechnology and Molecular Engineering Computational Nanotechnology and Molecular Engineering Workshop, Caltech, Pasadena, January 5Workshop, Caltech, Pasadena, January 5--17, 200417, 2004
1212
© A
ndré
s Ja
ram
illo-
Bote
ro, 20
03
Decoupling: proof of existence and criteriaDecoupling: proof of existence and criteria
MM defines a metric tensor on the configuration manifold (serial sdefines a metric tensor on the configuration manifold (serial spatial patial manipulators) [manipulators) [SpongSpong, 1992]. Then, if Euclidian, the system is said to be , 1992]. Then, if Euclidian, the system is said to be diagonalizable. This involves an analytic (symbolic) solution tdiagonalizable. This involves an analytic (symbolic) solution to the Ricci tensor o the Ricci tensor to determine conditions under which it vanishes [Jaramilloto determine conditions under which it vanishes [Jaramillo--BoteroBotero, 2002]. , 2002].
{ }[ ] { }[ ]
222 212
, , 0
ij hjhk ikhijk
i j i jh k k hl lij ik
l
MMM MR
hk l hj lq q q q q q q q
∂∂∂ ∂ = + − − ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ + − = ∑

Computational Nanotechnology and Molecular Engineering Computational Nanotechnology and Molecular Engineering Workshop, Caltech, Pasadena, January 5Workshop, Caltech, Pasadena, January 5--17, 200417, 2004
1313
© A
ndré
s Ja
ram
illo-
Bote
ro, 20
03
Invariance: proof of existence and criteriaInvariance: proof of existence and criteria
Involves calculating theInvolves calculating the MMqq (partial derivative of the spatial articulated body (partial derivative of the spatial articulated body inertia with respect to joint states) to determine the sensibiliinertia with respect to joint states) to determine the sensibility of ty of MM with respect with respect to manipulator pose [Jaramilloto manipulator pose [Jaramillo--BoteroBotero, 2002]. , 2002].
0T i T i TM H H M M H Hq d dr r r r = − = % %

Computational Nanotechnology and Molecular Engineering Computational Nanotechnology and Molecular Engineering Workshop, Caltech, Pasadena, January 5Workshop, Caltech, Pasadena, January 5--17, 200417, 2004
1414
© A
ndré
s Ja
ram
illo-
Bote
ro, 20
03
Arm Design for Decoupled ABI Arm Design for Decoupled ABI (case: 2 DOF direct drive)(case: 2 DOF direct drive)Method: Immobilizing all joints, but one, then generalizeMethod: Immobilizing all joints, but one, then generalize
Structure:Structure: for arms with open kinematic chain structure, the ABI cannot be decoupled unless the joint axes are orthogonal to each other (2 DOF).Mass properties:Mass properties: and 2 z xzm Lr I= 0yzI =
0zr =0L =
Two options for mass properties to be validTwo options for mass properties to be valid
z
b2b1
z
b1
b2-rz
2DOF Arm2DOF Arm
y
z
x
m2
m1
L
-rz
b1
b2Joint 1
Joint 2

Computational Nanotechnology and Molecular Engineering Computational Nanotechnology and Molecular Engineering Workshop, Caltech, Pasadena, January 5Workshop, Caltech, Pasadena, January 5--17, 200417, 2004
1515
© A
ndré
s Ja
ram
illo-
Bote
ro, 20
03
Arm Design for Invariant ABI Arm Design for Invariant ABI (case 1: 2 DOF direct drive)(case 1: 2 DOF direct drive)Method: Immobilizing all joints, but one, then generalizeMethod: Immobilizing all joints, but one, then generalize
Structure:Structure: for arms with open kinematic chain structure, the ABI can only be invariant, iff, one of the following conditions is satisfied:
10
0
z
x y
bb bL
== == 2
00
x y
xy yz xz
xx yy
r rI I II ML I
= == = =+ =
Type: IType: I--11 Type: IType: I--22
z
xL
b2
b1
b2
b1

Computational Nanotechnology and Molecular Engineering Computational Nanotechnology and Molecular Engineering Workshop, Caltech, Pasadena, January 5Workshop, Caltech, Pasadena, January 5--17, 200417, 2004
1616
© A
ndré
s Ja
ram
illo-
Bote
ro, 20
03
Arm Design for Invariant ABI Arm Design for Invariant ABI (case 1: 2 DOF direct drive)(case 1: 2 DOF direct drive)Method: Immobilizing all joints, but one, then generalizeMethod: Immobilizing all joints, but one, then generalize
2
2
0
0
y
xx yy
xy yz
z xz
rI I MLI Im Lr I
== += =
=
00
0xx yy
xy yz xz
LI II I I
== == = =
Type: IType: I--33 Type: IType: I--44y
z
x
b2
b1
b2
y
z
x
m2
L
-rz

Computational Nanotechnology and Molecular Engineering Computational Nanotechnology and Molecular Engineering Workshop, Caltech, Pasadena, January 5Workshop, Caltech, Pasadena, January 5--17, 200417, 2004
1717
© A
ndré
s Ja
ram
illo-
Bote
ro, 20
03
Arm Design for Decoupled and Invariant ABIArm Design for Decoupled and Invariant ABI(direct drive)(direct drive)Method: Immobilizing all joints, but one, then generalizeMethod: Immobilizing all joints, but one, then generalize
The necessary and sufficient conditions for an open kinematic chain structure to possess a decoupled and invariant ABI matrix are given by:
Structure:Structure: 2 DOF arms with orthogonal axes.
Mass properties:Mass properties: I-3 or I-4 in Theorem 2Theorem 2. I-3=DI-1 and I-4=DI-2

Computational Nanotechnology and Molecular Engineering Computational Nanotechnology and Molecular Engineering Workshop, Caltech, Pasadena, January 5Workshop, Caltech, Pasadena, January 5--17, 200417, 2004
1818
© A
ndré
s Ja
ram
illo-
Bote
ro, 20
03
Arm Design for Invariant ABI Arm Design for Invariant ABI (case 2: 3 DOF direct drive)(case 2: 3 DOF direct drive)Method: Adding configurations with previous conditions metMethod: Adding configurations with previous conditions met
2,3
2 2,2 3 2,3
3 3 3
3 3
00
0xy yz xz
xx yy
Lm q m qI I II I
=+ =
= = ==
Computational Nanotechnology and Molecular Engineering Computational Nanotechnology and Molecular Engineering Workshop, Caltech, Pasadena, January 5Workshop, Caltech, Pasadena, January 5--17, 200417, 2004
1919
© A
ndré
s Ja
ram
illo-
Bote
ro, 20
03
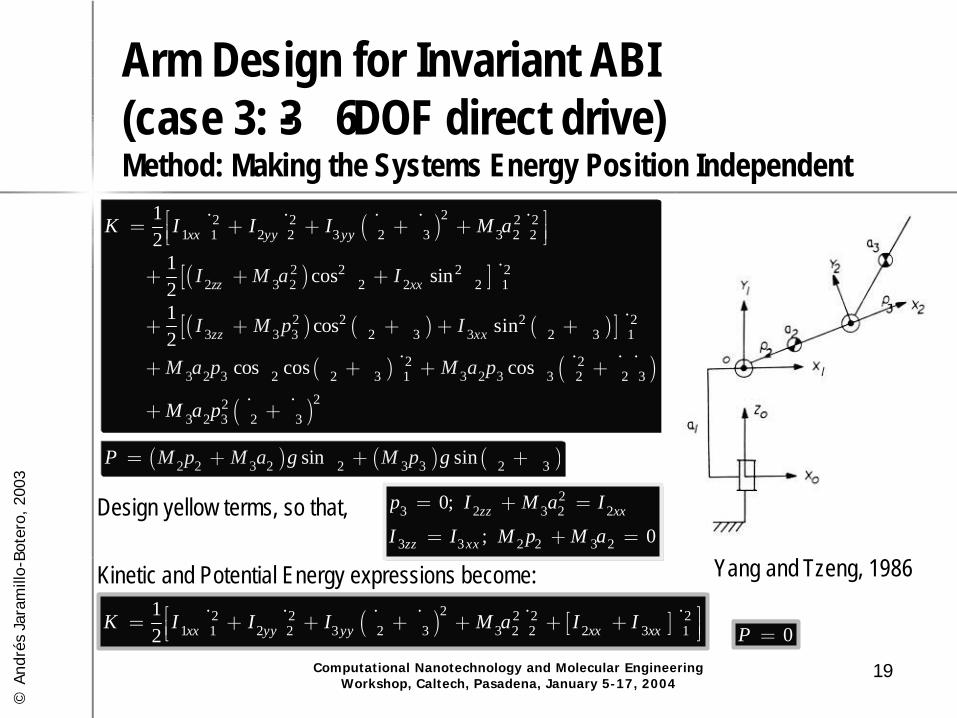
Arm Design for Invariant ABI Arm Design for Invariant ABI (case 3: 3(case 3: 3-- 6 DOF direct drive)6 DOF direct drive)Method: Making the Systems Energy Position IndependentMethod: Making the Systems Energy Position Independent
( )( )[ ]( ) ( ) ( )[ ]
( ) ( )( )
22 3 2 2
23 3
22 2 2 21 1 2 2 3 2 3 3 2 2
2 2 22 2 1
2 2 22 3 2 3 1
2 22 2 3 1 3 2 2 3
223 2 3
3
2 3
3
3 2 3 3 2 3
12
1 cos sin21 cos sin2
cos cos cos
zz xx
zz xx
xx yy yyK I I I M a
M a p
I M a I
I M p I
M a p M a p
q q q q q
q q q
q q q q qq q q q q q q q
q q
= + + + + + +
+ + + ++ + + +
+ +
+
+
& & & & &
&
&
& & & &
& &
( ) ( ) ( )2 2 3 2 3 32 2 3sin sinM p a MP M pg gq q q++= +
Design yellow terms, so that,2
3 2 3 2 2
3 3 2 2 3 2
0;; 0zz xx
zz xx
p I M a II I M p M a
= + == + =
( ) [ ]22 2 2 2 21 1 2 2 3 2 3 3 2 2 2 3 1
12 xx yy yy xx xxK I I I M a I Iq q q q q q = + + + + + +
& & & & & &0P =
Kinetic and Potential Energy expressions become: Yang and Tzeng, 1986

Computational Nanotechnology and Molecular Engineering Computational Nanotechnology and Molecular Engineering Workshop, Caltech, Pasadena, January 5Workshop, Caltech, Pasadena, January 5--17, 200417, 2004
2020
© A
ndré
s Ja
ram
illo-
Bote
ro, 20
03
Simple ValidationSimple Validation ((MatlabMatlab))
Jaramillo-Boter, Daza, Diaz, 2002

Computational Nanotechnology and Molecular Engineering Computational Nanotechnology and Molecular Engineering Workshop, Caltech, Pasadena, January 5Workshop, Caltech, Pasadena, January 5--17, 200417, 2004
2121
© A
ndré
s Ja
ram
illo-
Bote
ro, 20
03
Direct Drive vs. Remote ActuationDirect Drive vs. Remote Actuation
nn One way to relax the One way to relax the orthogonalityorthogonality condition for condition for decoupling is to relocate the decoupling is to relocate the actuators to reduce the actuators to reduce the reaction torques exerted by reaction torques exerted by one actuator and which do one actuator and which do not necessarily act on the not necessarily act on the adjacent link [Asada et al. adjacent link [Asada et al. 86].86].

Computational Nanotechnology and Molecular Engineering Computational Nanotechnology and Molecular Engineering Workshop, Caltech, Pasadena, January 5Workshop, Caltech, Pasadena, January 5--17, 200417, 2004
2222
© A
ndré
s Ja
ram
illo-
Bote
ro, 20
03
Decoupling by Actuator RelocationDecoupling by Actuator Relocation
nn 4 DOF multi4 DOF multi--bar spatial bar spatial mechanism: partiallymechanism: partially--decoupled decoupled and Invariant ABIand Invariant ABI
nn Decoupling handled under Decoupling handled under special pose, control dependent special pose, control dependent (O(1) SISO controller possible)(O(1) SISO controller possible)
nn The rotation of any link is due to The rotation of any link is due to 1 and only 1 actuator1 and only 1 actuator
8
6
5
4 1
3
2
7
9
1q
2q
3q4q
{ }{ }{ }
1 4 6
52 8
3 7 9
234
S S SS S SS S S
= = == = == = =

Computational Nanotechnology and Molecular Engineering Computational Nanotechnology and Molecular Engineering Workshop, Caltech, Pasadena, January 5Workshop, Caltech, Pasadena, January 5--17, 200417, 2004
2323
© A
ndré
s Ja
ram
illo-
Bote
ro, 20
03
Computed Torque Control LawComputed Torque Control Law
Where Where ee, , KKvv and and KKpp are constant gain matricesare constant gain matrices..
The error dynamics:The error dynamics:
FF:FF: provides necessary drive to move along nominal path. provides necessary drive to move along nominal path. FB:FB: provides correction torques to trajectoryprovides correction torques to trajectory
( ) ( ) ( )( ), v pdT M C M K e K eq q q q q q= + + − −&& & & &
de q q= −
0te →∞ →
( )( ) ( ),v pdT M K e K e Cq q q q q= − − +&& & &&
( )( ) 0v pM e K e K eq + + =&& &
FF: Feedforward Component FB: Feedback Component
Introduce actual error in trajectory

Computational Nanotechnology and Molecular Engineering Computational Nanotechnology and Molecular Engineering Workshop, Caltech, Pasadena, January 5Workshop, Caltech, Pasadena, January 5--17, 200417, 2004
2424
© A
ndré
s Ja
ram
illo-
Bote
ro, 20
03
Thermal Noise and Positional Thermal Noise and Positional Variance (uncertainty)Variance (uncertainty)
( )( )[ ]( )[ ]
exp /
exp /B
x
B
V x k Tf xV x k T dx
∞
−∞
−=−∫
( )[ ][ ]
( )
( )
2
2
2
2 2
exp /2
exp /2
exp /22
1 exp /22
s Bx
s B
s B sB
classclass
k x k Tf xk x k T dx
k x k T kk T
xp
sps
∞
−∞
−=−
−=
= −
∫
( ) 212 sV x k x=
From Classical Statistical Mechanics
Potential Energy Harmonic Oscillator
PDF for position coordinate x

Computational Nanotechnology and Molecular Engineering Computational Nanotechnology and Molecular Engineering Workshop, Caltech, Pasadena, January 5Workshop, Caltech, Pasadena, January 5--17, 200417, 2004
2525
© A
ndré
s Ja
ram
illo-
Bote
ro, 20
03
Thermal Noise and Positional Thermal Noise and Positional Variance (uncertainty)Variance (uncertainty)
2 BS
k Tks =
s : RMS positional errorkS: Transverse stiffnesskb: Boltzmann’s constantT: temperature
s 2: 0.02 nm (0.2 Å)KS: 10 N/mkb: 1.38 x 10-23 J/KT: 300 K
Thermal noise can be controlled by decreasing the temperature T or by increasing the restoring force fR (measured by the stiffness).
Less than an Atomic diameterPositional VariancePositional Variance
R Sf k d= − Diamond parametersChosen for example

Computational Nanotechnology and Molecular Engineering Computational Nanotechnology and Molecular Engineering Workshop, Caltech, Pasadena, January 5Workshop, Caltech, Pasadena, January 5--17, 200417, 2004
2626
© A
ndré
s Ja
ram
illo-
Bote
ro, 20
03
Thermal Noise and Positional Thermal Noise and Positional Variance (the Quantum version)Variance (the Quantum version)
s : RMS positional errorh: Planck’s constantkb: Boltzmann’s constantks: Stiffnessw: frequencyT: temperature
2 1 1 1 12 2exp 1 exp 1s s
B B
ww wk mk
k T k Ts
= + = + − −
h hh h
PDF for position and momentum
Drexler, K.E., Nanosystems: molecular machinery, manufacturing, and computation, Wiley and Sons, 1992.
22 Smks = h

Computational Nanotechnology and Molecular Engineering Computational Nanotechnology and Molecular Engineering Workshop, Caltech, Pasadena, January 5Workshop, Caltech, Pasadena, January 5--17, 200417, 2004
2727
© A
ndré
s Ja
ram
illo-
Bote
ro, 20
03
Transverse stiffness of Transverse stiffness of a cylindrical a cylindrical rodrod of radius r and length Lof radius r and length L
E: Young’s modulusk: transverse stiffnessr: radiusL: lengthI: Moment of inertia cross section
43 3
3 34S
EI r Ek L Lp= =
E: 1012 N/m2
k: 10 N/mr: 8 nmL: 50 nm
s 2 =0.007 nm
2 BS
k Tks = 3
24
43
BL k Tr Es p=
Diamond parametersChosen for example
Computational Nanotechnology and Molecular Engineering Computational Nanotechnology and Molecular Engineering Workshop, Caltech, Pasadena, January 5Workshop, Caltech, Pasadena, January 5--17, 200417, 2004
2828
© A
ndré
s Ja
ram
illo-
Bote
ro, 20
03
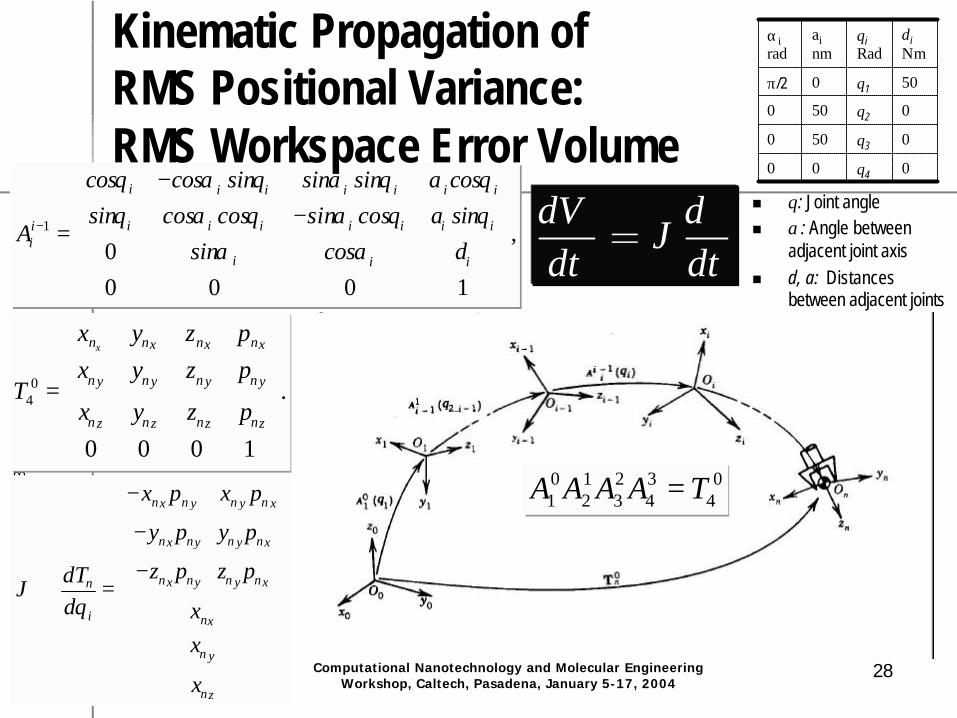
1
00 0 0 1
i i i i i i i
i i i i i i iii
i i i
cos cos sin sin sin a cossin cos cos sin cos a sin
Asin cos d
θ α θ α θ θθ α θ α θ θ
α α−
− ⋅ ⋅ ⋅ ⋅ − ⋅ ⋅ = ,
04
0 0 0 1
xn n n nx x x
n n n ny y y y
n n n nz z z z
x y z px y z p
Tx y z p
= .
n n n nx y y x
n n n nx y y x
n n n nx y y xn
i nx
n y
nz
x p x p
y p y p
z p z pdTJd x
x
x
θ
− +
− +
− +⇒ =
Kinematic Propagation of Kinematic Propagation of RMS Positional Variance:RMS Positional Variance:RMS Workspace Error VolumeRMS Workspace Error Volume
nn θθ:: Joint angleJoint anglenn αα:: Angle between Angle between
adjacent joint axisadjacent joint axisnn d, a:d, a: Distances Distances
between adjacent jointsbetween adjacent joints
0 1 2 3 01 2 3 4 4A A A A T=
0θ400
0θ3500
0θ2500
50θ10ππ/2/2
diNm
θiRad
ainm
αirad
dV dJdt dtq=

Computational Nanotechnology and Molecular Engineering Computational Nanotechnology and Molecular Engineering Workshop, Caltech, Pasadena, January 5Workshop, Caltech, Pasadena, January 5--17, 200417, 2004
2929
© A
ndré
s Ja
ram
illo-
Bote
ro, 20
03
Molecular Building BlocksMolecular Building Blocks
DNA packagingDNA packagingMotor (Purdue),Motor (Purdue),ATPase (UCB),ATPase (UCB),Viral PeptideViral PeptideVPL (Rutgers).VPL (Rutgers).
Electric Electric Motors, Motors, Pneumatics, Pneumatics, HydraulicsHydraulics
ActuatorsActuators
Proteins, DNA, Proteins, DNA, NanojointsNanojointsRotational, prismatic, spherical …Rotational, prismatic, spherical …JointsJoints
Metal, Plastic, WoodMetal, Plastic, WoodStructural ElementsStructural Elements
DNA CNB
M. G. Rossmann et al. 2003. Bacteriophage f29 scaffolding protein gp7 before and after prohead
assembly. Nat. Struct.Biol. 10:572-576
Motor that powers the DNA packaging system in a virus
Hongyun Wang, George Oster, Nature396, 279-282 (1998)).
Mavroidis, C., and Dubey, A., 2003, "From Pulses to Motors",
Nature Materials, 9 2(9):573-574

Computational Nanotechnology and Molecular Engineering Computational Nanotechnology and Molecular Engineering Workshop, Caltech, Pasadena, January 5Workshop, Caltech, Pasadena, January 5--17, 200417, 2004
3030
© A
ndré
s Ja
ram
illo-
Bote
ro, 20
03
Molecular Building BlocksMolecular Building Blocks
Magnetic force sensing Magnetic force sensing Force sensors, position Force sensors, position sensors, pressure, sensors, pressure, temperaturetemperature
SensorsSensors
DNA double DNA double crosscross--over (Rutgers),over (Rutgers),Carbon Carbon nanotubesnanotubes
Gears, Belts, ChainsGears, Belts, ChainsTransmission ElementsTransmission Elements
DendrimersDendrimers(NASA Ames Research Center)
WiresWiresInterconnectsInterconnects

Computational Nanotechnology and Molecular Engineering Computational Nanotechnology and Molecular Engineering Workshop, Caltech, Pasadena, January 5Workshop, Caltech, Pasadena, January 5--17, 200417, 2004
3131
© A
ndré
s Ja
ram
illo-
Bote
ro, 20
03
Mol
ecul
ar
Mol
ecul
ar P
arts
Parts
FullereneFullerene BasedBased NanogearsNanogearsD.H. D.H. RobertsonRobertson, B.I. , B.I. DunlapDunlap*, & C.T. *, & C.T. WhiteWhite*, *Naval *, *Naval ResearchResearch LaboratoryLaboratory, Washington DC., Washington DC.
0 to 0.1 revs/ps in 10ps 0 to 0.5 revs/ps in 50ps 0 to 0.5 revs/ps in 10ps
0.5 rev/ps=5x10 11rev/s=500GHz=1/2 trillion revs/sec
Computational Nanotechnology and Molecular Engineering Computational Nanotechnology and Molecular Engineering Workshop, Caltech, Pasadena, January 5Workshop, Caltech, Pasadena, January 5--17, 200417, 2004
3232
© A
ndré
s Ja
ram
illo-
Bote
ro, 20
03
Mol
ecul
ar P
arts
Mol
ecul
ar P
arts
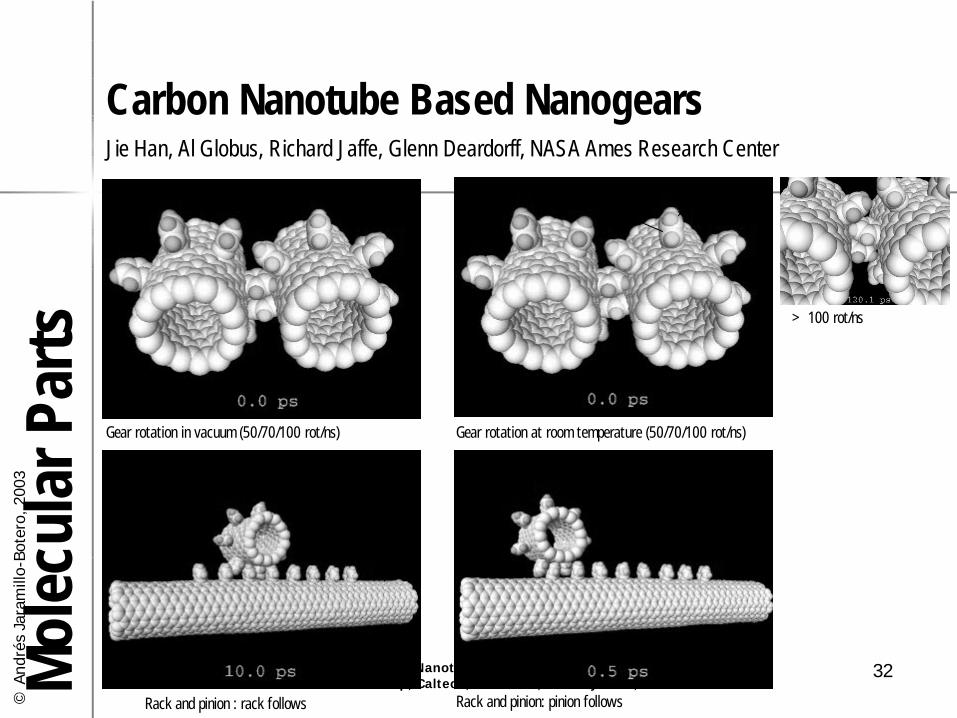
Carbon Carbon NanotubeNanotube Based Based NanogearsNanogearsJieJie Han, Al Han, Al GlobusGlobus, Richard Jaffe, Glenn , Richard Jaffe, Glenn DeardorffDeardorff, NASA Ames Research Center, NASA Ames Research Center
Rack and pinion : rack follows Rack and pinion: pinion follows
Gear rotation in vacuum (50/70/100 rot/ns)
HydrogenBencene Molecule
Gear rotation at room temperature (50/70/100 rot/ns)
>100 rot/ns

Computational Nanotechnology and Molecular Engineering Computational Nanotechnology and Molecular Engineering Workshop, Caltech, Pasadena, January 5Workshop, Caltech, Pasadena, January 5--17, 200417, 2004
3333
© A
ndré
s Ja
ram
illo-
Bote
ro, 20
03
Mol
ecul
ar P
arts
Mol
ecul
ar P
arts
Planetary Gear (version 1) (Version 2)
Kinetic T / Rotation step Kinetic T / Time
Differential Gear
Planetary GearsPlanetary GearsCagin, T., Jaramillo-Botero, A., Gao, G., W. A. Goddard, III, Nanotechnology 9 (3), 143-152 (1998).Eric Drexler, Institute of Molecular Manufacturing

Computational Nanotechnology and Molecular Engineering Computational Nanotechnology and Molecular Engineering Workshop, Caltech, Pasadena, January 5Workshop, Caltech, Pasadena, January 5--17, 200417, 2004
3434
© A
ndré
s Ja
ram
illo-
Bote
ro, 20
03
NanoactuatorNanoactuator: : NeonNeon AtomAtom BombBombCagin, T., JaramilloCagin, T., Jaramillo--Botero, A., Gao, G., W. A. Goddard, IIIBotero, A., Gao, G., W. A. Goddard, IIIEric Eric DrexlerDrexler, , InstituteInstitute ofof Molecular Molecular ManufacturingManufacturing
LaserLaser ActuatedActuated NanomotorNanomotorDr. Don W. Dr. Don W. NoidNoid, Dr. , Dr. BobbyBobby G. G. SumpterSumpter, , RobertRobertTuzunTuzun, , OakOak RidgeRidge NationalNational LaboratoryLaboratory (ORNL)(ORNL)
Positive Charge
Negative Charge
Mol
ecul
ar P
arts
Mol
ecul
ar P
arts
•Fixe
d Molec
ular mach
ines can
be act
uated e
lectrica
lly.
•Floa
ting Molec
ular mach
ines (in
liquid) c
an be ac
tuated
via
chemical
energy
, light o
r acous
tic ener
gy
•Molec
ular mach
ines ins
ide the
body ca
n be act
uated v
ia
glucos
e -oxyge
n combus
tion cel
ls

Computational Nanotechnology and Molecular Engineering Computational Nanotechnology and Molecular Engineering Workshop, Caltech, Pasadena, January 5Workshop, Caltech, Pasadena, January 5--17, 200417, 2004
3535
© A
ndré
s Ja
ram
illo-
Bote
ro, 20
03
Mol
ecul
ar P
arts
Mol
ecul
ar P
arts
OrganicOrganic ActuatorsActuatorsLet the RecBCD helicase enzyme adhere to the ADN strand by its loose end. As the RecBCDuncoils the AND strand, the fluorescent dye is removed (the ADN string seems to shorten). 1000 base pairs/sec. RedBCD is composed of 3 proteins, 2 of which are molecular motors!
Dillingham, M. S., Spies, M. and Kowalczykowski, S.C. (2003) RecBCD enzyme is a bipolar DNA helicase. Nature, in press. Universidad de California en Davis.
DNA Throttle Controls Molecular Machine DNA Throttle Controls Molecular Machine
Kinesin is a power generating enzyme, a protein motor that converts free energy
from the phosphate-gamma bond of ATP into mechanical work. This work is used to transport intracellular organisms along
the axonal microtubules.
Computational Nanotechnology and Molecular Engineering Computational Nanotechnology and Molecular Engineering Workshop, Caltech, Pasadena, January 5Workshop, Caltech, Pasadena, January 5--17, 200417, 2004
3636
© A
ndré
s Ja
ram
illo-
Bote
ro, 20
03
ConclusionsConclusionsnn NanomanipulatorNanomanipulator cannot be treated as Macroscopic counterpartscannot be treated as Macroscopic counterpartsnn Open Open kinematickinematic chain DD arms cannot have > 2 decoupled DOF,chain DD arms cannot have > 2 decoupled DOF,nn Decoupling can be achieved for > 2 DOF arms by actuator Decoupling can be achieved for > 2 DOF arms by actuator
relocation (closed relocation (closed kinematickinematic chains),chains),nn Configuration invariance possible for more than 3DOF by Configuration invariance possible for more than 3DOF by
elimination of nonlinear terms due to velocity (elimination of nonlinear terms due to velocity (microcanonicalmicrocanonical),),nn Linearization improves highLinearization improves high--speed performance (speed performance (microcanonicalmicrocanonical))nn Full decoupling (3DOF): SISO control O(1) parallel dynamic Full decoupling (3DOF): SISO control O(1) parallel dynamic
((microcanonicalmicrocanonical),),nn Simplified dynamics larger integration timeSimplified dynamics larger integration time--steps in rigidsteps in rigid--body MD,body MD,nn Full linearization not possible for canonical due to friction anFull linearization not possible for canonical due to friction and d
nonbondednonbonded interactions, but improved performance achieved,interactions, but improved performance achieved,nn Decoupling/Invariance: reduction in computational steps (/1,000 Decoupling/Invariance: reduction in computational steps (/1,000
without reduction of friction terms in canonical)without reduction of friction terms in canonical)

Computational Nanotechnology and Molecular Engineering Computational Nanotechnology and Molecular Engineering Workshop, Caltech, Pasadena, January 5Workshop, Caltech, Pasadena, January 5--17, 200417, 2004
3737
© A
ndré
s Ja
ram
illo-
Bote
ro, 20
03
AcknowledgmentsAcknowledgments
nn Institute of Pure and Applied Mathematics (IPAM), University Institute of Pure and Applied Mathematics (IPAM), University of California Los Angeles (UCLA).of California Los Angeles (UCLA).
nn National Science Foundation (National Science Foundation (NanoscaleNanoscale Science and Science and Engineering Program)Engineering Program)
Special thanks Special thanks to:to:nn Dr. Mario Blanco, MSC, CaltechDr. Mario Blanco, MSC, Caltech