Embed Size (px)
Citation preview

Изм. Лист № докум. Подпись
ДатаЛист
3
ОП-02069964-У-ОТД-16
Разраб.Провер. Чугунов М.В.
Н. Контр.
Утверд.
Расчет на прочность детали«Основание» с использованием
системы SolidWorksПояснительная записка
Лит. Листов31
РИМ, каф. ОТДд/о, 202
РЕФЕРАТ
Отчёт 64 листа, 69 рисунков, 20 источников
SOLIDWORKS, ТРЕХМЕРНОЕ МОДЕЛИРОВАНИЕ,
КОНСТРУИРОВАНИЕ,САПР, НАТУРНАЯ МОДЕЛЬ, ВИРТУАЛЬНОЕ
ПРОСТРАНСТВО, РОБОТОТЕХНИКА, МЕХАТРОНИКА, МОБИЛЬНЫЙ
РОБОТ.
Цель проекта - разработка натурной и интегрированной 3D модели
мобильного робота в системе SolidWorks.
Средство разработки модели:SolidWorks 2013 PremiumEdition
Планируемый функционал:
- разработка 3Dмоделей;
- создание сборки;
- инженерный анализ;
- Simulationдля решения практических задач.
Результирующая 3D модель представляет собой полноценную
модельтрицикла. Данная модель может являться основой для сборки как
трехколесного автомобиля так и мини-трактора. Спроектированная модель
может быть взята для изготовления на любом машиностроительном
предприятии.
у

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
СОДЕРЖАНИЕ
ВВЕДЕНИЕ
1 Технологии SolidWork
1.
1
SolidWorks – система 3D-моделирования и анализа
1.
2
Мобильная мехатроника и робототехника
1
.3
Принципы современного трехмерного моделирования в
среде SolidWorks
1.
4
3D и натурное моделирование мобильных роботов и
мехатронных систем
2 Проектирование и анализ несущих систем автомобильной техники
2.
1
Основные несущие элементы
2.
2
Жесткие элементы, упругие элементы малой жесткости,
упругие элементы высокой жёсткости
2.
3
Граничные условия по перемещениям
3 3D-моделирование трицикла в среде SolidWorks
3.1
Моделирование деталей
3.
2
Моделирование сборки. 3D и натурное
4 Безопасность жизнедеятельности в помещение с ПК
4.
1
Организационно-правовые мероприятия по охране труда
4.
2
Негативные факторы, возникающие при работе на
компьютере и их влияние на организм человека
4. Мероприятия по снижению негативных факторов

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
3
4.
4
Рациональная организация рабочего места программиста
4.
5
Пожарная безопасность при работе на ВЦ
ЗАКЛЮЧЕНИЕ
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
ВВЕДЕНИЕ
Задача автоматизации технологического проектирования для современного
машиностроения является чрезвычайно важной и актуальной. Ее решение
обеспечит сокращение сроков внедрения в производство новых проектно-
конструкторских разработок и повышение его эффективности.
Системы автоматизированного проектирования изделий охватывают все
уровни автоматизации проектно-конструкторских работ — от проектирования
детальных и сборочных чертежей на основе параметрического двумерного
черчения до создания трехмерных параметрических моделей деталей и
сборочных единиц.
Одна из важнейших задач современных САПР — избавить инженера от
рутинной работы, предоставить ему возможность заниматься творческими
процессами. В зависимости от возможностей, современные САПР можно условно
разбить на три уровня: нижний, средний и высший. Предполагается, что системы
нижнего уровня (например, AutoCAD, VersaCAD, CADKEY) обеспечивают
выполнение чертежных работ.
Системы среднего уровня (например, Т-FLEX CAD, Solid Edge) сокращают
сроки выпуска документации и время разработки проектов за счет автоматизации
выпуска конструкторской и технологической документации, программирования
2,5-координатной обработки заготовок на станках с ЧПУ. Эти системы
позволяют создать объемную модель изделия, по которой определяются
инерционно-массовые, прочностные и иные характеристики, контролируется
взаимное расположение деталей, моделируются все виды ЧПУ-обработки,
отрабатывается внешний вид по фотореалистичным изображениям, выпускается
документация. Кроме того, обеспечивается управление проектами на базе
электронного документооборота. Экономический эффект состоит в многократном
повышении производительности труда при резком сокращении ошибок и
соответственно в улучшении качества изделий.

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
Системы высшего уровня (EDS Unigraphics, Pro/Engineer, CATIA или
CADDS) обеспечивают интеграцию всего цикла создания изделия от
проектирования, подготовки к производству до изготовления. Они позволяют
конструировать детали с учетом особенностей материала (пластмасса,
металлический лист), проводить динамический анализ сборки с имитацией
сборочных приспособлений и инструмента, проектировать оснастку с
моделированием процессов изготовления (штамповки, литья, гибки), что
исключает брак в оснастке и делает ненужным изготовление натурных макетов,
то есть значительно уменьшаются затраты и время на подготовку к производству
изделия. Программы математического анализа таких САПР могут включать
прочностной, кинематический и динамический анализ. Моделирование
механообработки позволяет оценить качество деталей с точки зрения их
деформации[1]. Экономический эффект подобных систем зависит от размера
зарплаты конструктора или технолога и навыков использования САПР.
Основной целью данной работы является моделирование и сборка 3D-
модели трицикла, прототипом которого является натурная модель, собранная из
деталей конструктора от компании «FisherTechnik».Основным средством
решения данной задачи является использование базовой конфигурации
SolidWorks.

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
1 Технологии Solidworks
1.1 Solidworks – система 3D моделирования и анализа
Базовое решение SolidWorks - это система гибридного параметрического
моделирования, которая предназначена для проектирования деталей и сборок в
трёхмерном пространстве с возможностью проведения различных видов
экспресс-анализа, а также оформления конструкторской документации в
соответствии с требованиями ЕСКД.
Отличительными особенностями SolidWorks являются:
твердотельное и поверхностное параметрическое моделирование;
полная ассоциативность между деталями, сборками и чертежами;
богатый интерфейс импорта/экспорта геометрии;
экспресс-анализ прочности деталей и кинематики механизмов;
специальные средства по работе с большими сборками;
простота в освоении и высокая функциональность;
гибкость и масштабируемость;
100% соблюдение требований ЕСКД при оформлении чертежей;
русскоязычный интерфейс и документация.
Программный пакет SolidWorks во многом построен на базе технологии
SolidWorks Intelligent Feature Technology, сокращенно SWIFT. Это комплекс
встроенных экспертных систем, позволяющих на самых ранних этапах
проектирования с высокой степенью автоматизации решать задачи оптимизации
проекта. Это и инженерный экспресс-анализ (прочность, аэромеханика,
кинематика и динамика механизмов), и анализ технологичности (применительно
к механической обработке или требований к литью пластмасс), и комплексная
проверка соответствия электронного документа выбранным стандартам, а также
анализ размерных цепей, проверка собираемости изделия, поиск конфликтов,
автоматическая простановка размеров и технологических обозначений, и даже

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
автоматическое создание нового проекта на основе существующего по ряду
формальных параметров[2].
В SolidWorks можно одинаково удачно работать как с твёрдыми телами, так
и с поверхностями. Как правило, деталь представляет собой твёрдое тело,
поверхность, либо - сочетание твердого тела и набора поверхностей. Процесс
построения 3D модели основывается на создании элементарных геометрических
примитивов и выполнения различных операций между ними. Подобно
конструктору «LEGO» модель набирается из стандартных элементов (блоков) и
может быть отредактирована путём добавления (удаления) этих элементов, либо -
путём изменения характерных параметров блоков. 3D модель несёт в себе
наиболее полное описание физических свойств объекта (объем, масса, моменты
инерции) и даёт проектанту возможность работы в виртуальном 3D пространстве,
что позволяет на самом высоком уровне приблизить компьютерную модель к
облику будущего изделия, исключая этап макетирования[3].
В базовую конфигурацию SolidWorks, входит модуль экспресс-анализа
прочности - COSMOSXpress. COSMOSXpress является «облегчённой» версией
пакета COSMOS/Works, и предназначен, в первую очередь, для инженеров-
проектировщиков, не обладающих глубокими познаниями в теории конечно-
элементного анализа. Тем не менее, COSMOSXpress позволяет проектировщику
определить, где расположены концентраторы напряжений, оценить
«перетяжелённые» элементы конструкции, из которых может быть удалён
избыточный материал с целью снижения веса и, соответственно, стоимости
будущего изделия.
COSMOSXpress выполнен в виде программы-помощника, подсказывающей
пользователю последовательность действий, необходимых для подготовки
расчётной модели и проведения анализа. Пользовательский интерфейс
COSMOSXpress, как и SolidWorks, выполнен на русском языке, что по-своему
уникально, поскольку этого нет ни в одной импортной системе конечно-
элементного анализа[4].

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
Процесс конструирования в SolidWorks не заканчивается на разработке
объемных деталей и сборок. Программа позволяет автоматически создавать
чертежи по заданной 3D модели, исключая ошибки проектанта, неизбежно
возникающие при начертании проекций изделия вручную. SolidWorks
поддерживает чертёжные стандарты GOST, ANSI, ISO, DIN, JIS, GB и BSI.
Чертежи SolidWorks обладают двунаправленной ассоциативностью с 3D
моделями, благодаря чему размеры модели всегда соответствуют размерам на
чертеже. В SolidWorks имеется бесплатный модуль - eDrawings, с помощью
которого можно создавать, просматривать и выводить на печать электронные
чертежи SolidWorks и AutoCAD. Благодаря встроенной программе просмотра
чертежи eDrawings можно сразу же открыть для просмотра без использования
каких-либо заранее установленных на компьютере CAD-систем или других
средств просмотра[5]. Очень удобным и наглядным средством, позволяющим
понять конструкцию изделия, изображённого на чертеже, является возможность
анимировать чертёж и посмотреть, как соотносятся между собой чертежные
виды.
В состав базового решения SolidWorks входит специальный интерфейс для
разработки пользовательских подпрограмм - SolidWorks API (Application
Programming Interface). API интерфейс содержит сотни функций, которые можно
вызывать из программ Microsoft Visual C++, Visual Basic, VBA (Excel, Word и
т.д.) или файлов-макросов SolidWorks[6]. Эти функции предоставляют
программисту прямой доступ к функциональным возможностям САПР
SolidWorks и позволяют автоматизировать и, таким образом, идеально
настраивать систему на решение специфичных задач конкретного предприятия.
Опциональные модули SolidWorks позволяют расширить базовые
возможности дополнительными функциями по:
созданию фотореалистичных изображений (PhotoWorks);
распознаванию дерева построения и параметризации геометрии
импортированной из других CAD систем (FeatureWorks);

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
созданию презентационных видеороликов изделий в среде SolidWorks
(SolidWorks Animator);
трехмерной обводке кабелей электрических систем и трубопроводов
(SolidWorks Routing);
созданию автономно просматриваемых чертежей и моделей, для обмена
информацией с партнерами не имеющими SolidWorks (eDrawings) и т.д.
1.2 Мобильная мехатроника и робототехника
Мехатроника – это область науки и техники, основанная на
синергетическом объединении узлов точной механики с электронными,
электротехническими и компьютерными компонентами, обеспечивающими
проектирование и производство качественно новых модулей, систем, машин и
систем с интеллектуальным управлением их функциональными движениями. Для
мехатроники характерно стремление к полной интеграции механики,
электрических машин, силовой электроники, программируемых контроллеров,
микропроцессорной техники и программного обеспечения
Так как наиболее полное развитие данные тенденции получили в Японии, а
с термином «электрический привод» там знакомы не были, для описания данных
систем в Японии был введен термин «мехатроника». Непосредственным автором
является японец Тецуро Мориа (Tetsuro Moria), старший инженер компании
Yaskawa Electric, а сам термин появился в 1969 году. Термин состоит из двух
частей – «меха-», от слова механика, и «-троника», от слова электроника. Сначала
данный термин был торговой маркой (зарегистрирована в 1972 году), но после
его широкого распространения компания отказалась от его использования в
качестве зарегистрированного торгового знака. Из Японии мехатроника
распространилась по всему миру. Из иностранных изданий термин
«мехатроника» попал в Россию и стал широко известен. Сейчас под

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
мехатроникой понимают системы электропривода с исполнительными органами
относительно небольшой мощности, обеспечивающие прецизионные движения и
имеющие развитую систему управления. Сам термин «мехатроника»
используется, прежде всего, для отделения от общепромышленных систем
электропривода и подчеркивания особых требований к мехатронным
системам[7]. Именно в таком смысле мехатроника как область техники известна в
мире.
Мехатронный модуль – это функционально и конструктивно
самостоятельное изделие для реализации движений с взаимопроникновением и
синергетической аппаратно-программной интеграцией составляющих его
элементов, имеющих различную физическую природу. К элементам различной
физической природы относят механические, электротехнические, электронные,
цифровые, пневматические, гидравлические, информационные и т. д.
компоненты.
Мехатронная система–совокупность нескольких мехатронных модулей и
узлов, синергетически связанных между собой, для выполнения конкретной
функциональной задачи. Обычно мехатронная система является объединением
собственно электромеханических компонентов с силовой электроникой, которые
управляются с помощью различных микроконтроллеров, ПК или других
вычислительных устройств. При этом система в истинно мехатронном подходе,
несмотря на использование стандартных компонентов, строится как можно более
монолитно, конструкторы стараются объединить все части системы воедино без
использования лишних интерфейсов между модулями.
Робототехника –область науки и техники, ориентированная на создание
роботов и робототехнических систем, предназначенных для автоматизации
сложных технологических процессов и операций, в том числе, выполняемых в
недетерминированных условиях, для замены человека при выполнении тяжелых,
утомительных и опасных работ.

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
Впервые (в 1920 г.) слово «робот» вводит в обращение Карел Чапек в пьесе
“R.U.R.” (“Rossum’sUniversalRobots”). Слово «робототехника» (в его английском
варианте «robotics») было впервые использовано в печати Айзеком Азимовым в
научно-фантастическом рассказе «Лжец», опубликованном в 1941 г.
Робот– многофункциональная перепрограммируемая машина, для
полностью или частичного автоматического выполнения двигательных функций
аналогично живым организмам, а также некоторых интеллектуальных функций
человека. Под «перепрограммируемостью» понимают возможность замены,
коррекции или генерации управляющей программы автоматически или при
помощи человека.
Мобильный робот–робот, способный перемещаться в рабочей среде в
соответствии с управляющей программой. «Мобильный робот» может быть
снабжен манипулятором. К мобильным роботам не относятся передвижные
манипуляционные роботы, которые могут быть оперативно перемещены в
рабочей среде вручную или при помощи транспортных средств с ручным
управлением.
Главными отличительными чертами роботов от традиционных средств
автоматизации являются гибкость, адаптивность, интеллектуальность и
универсальность. Под гибкостью роботов понимают способность их
управляющей системы быстро перестраиваться на выполнение новых операций
путем перепрограммирования движений роботов в режиме обучения их
управляющей системы. Адаптивность роботов характеризуется способностью
быстро реагировать на внешние и внутренние возмущения и автоматически
приспосабливаться к изменяющимся условиям функционирования. Эту
способность определяют, прежде всего, средствами их «очувствления», т.е.
количеством и характеристиками датчиков внутренней и внешней информации, а
также алгоритмическим и программным обеспечением самонастройки
(адаптации) управляющей системы. Интеллектуальность роботов заключается в
их способностях решать задачи интеллектуального характера: анализ сложных

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
изображений и сцен, распознавание образов, планирование движений и операций,
диагностика состояний и т.п.[8]. Универсальность (многофункциональность)
роботов позволяет решать не одну, а целый класс производственных задач.
Можно выделить четыре поколения роботов. Роботы первого поколения –
это роботы с программным управлением, предназначенные в основном для
выполнения определенной, заранее запрограммированной последовательности
операций, диктуемой тем или иным технологическим процессом. Управление
роботами первого поколения осуществляется по жесткой программе,
формируемой в режиме обучения с помощью оператора. Функциональные
возможности роботов первого поколения ограничены малым ассортиментом
датчиков и несовершенством системы программного управления.
Роботы второго поколения – это роботы с адаптивным управлением. Они
отличаются от роботов первого поколения существенно большим ассортиментом
датчиков внешней информации и более сложной самонастраивающейся системой
автоматического управления, построенной на базе микропроцессорной техники и
управляющей ЭВМ.
Третье поколение – это роботы с интеллектуальным управлением от ЭВМ.
Они принципиально отличаются от роботов второго поколения сложностью
функций и совершенством системы автоматического управления, включающей в
себя те или иные элементы искусственного интеллекта. Такие роботы
предназначены не столько для имитации физических действий человека, сколько
для автоматизации его интеллектуальной деятельности. Отличительной чертой
интеллектуальных роботов является их способность к обучению на опыте и
адаптации в процессе решения задач[8].
В связи с быстрым развитием нейрокомпьютеров и нейросетевых
технологий появилась возможность создания роботов четвертого поколения –
роботов с нейронными системами управления. Принципы нейронного
управления в значительной степени аналогичны принципам работы мозга и
нервной системы человека. Такие системы не программируют заранее. Они

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
обучаются и самоорганизуются на решение различных двигательных,
информационных и интеллектуальных задач.
По мере развития робототехники появились гибкие производственные
систем, обеспечивающие полную автоматизацию технологического цикла.
Теоретическую основу робототехники составляют два направления: синтез
управляемых механических устройств и управление механическими
устройствами с помощью электроники. В последние годы в робототехнике
происходят качественные изменения, основанные на использовании достижений
новой науки – мехатроники.
1.3 Принципы современного трехмерного моделирования в среде SolidWorks
На сегодняшний день, SolidWorks – один из самых популярных и широко
используемых в мире пакетов 3D моделирования, в состав которого входит
широкий набор интегрированных CAE/CAM/PDM модулей и более 500
специализированных приложений.
Процесс моделирования начинается с выбора конструктивной плоскости, в
которой будет строиться двухмерный эскиз. Впоследствии этот эскиз можно тем
или иным способом легко преобразовать в твёрдое тело. При создании эскиза
доступен полный набор геометрических построений и операций редактирования.
Нет никакой необходимости сразу точно выдерживать требуемые размеры,
достаточно примерно соблюдать конфигурацию эскиза. Позже, если потребуется,
конструктор может изменить значение любого размера и наложить связи,
ограничивающие взаимное расположение отрезков, дуг, окружностей и т.п. Эскиз
конструктивного элемента может быть легко отредактирован в любой момент
работы над моделью.
Пользователю предоставляются несколько различных средств создания
объёмных моделей. Основными формообразующими операциями в SolidWorks
являются команды добавления и снятия материала. Система позволяет
выдавливать контур с различными конечными условиями, в том числе на

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
заданную длину или до указанной поверхности, а также вращать контур вокруг
заданной оси. Возможно создание тела по заданным контурам с использованием
нескольких образующих кривых (так называемая операция лофтинга) и
выдавливанием контура вдоль заданной траектории[9]. Кроме того, в SolidWorks
необычайно легко строятся литейные уклоны на выбранных гранях модели,
полости в твёрдых телах с заданием различных толщин для различных граней,
скругления постоянного и переменного радиуса, фаски и отверстия сложной
формы.
При этом система позволяет отредактировать в любой момент времени
однажды построенный элемент твердотельный модели.
Важной характеристикой системы является возможность получения
развёрток для спроектированных деталей из листового материала. При
необходимости в модель, находящуюся в развёрнутом состоянии, могут быть
добавлены новые места сгиба и различные конструктивные элементы, которые по
каким-либо причинам нельзя было создать раньше.
При проектировании деталей, изготовляемых литьём, очень полезной
оказывается возможность создания разъёмных литейных форм. Если для работы
необходимо использовать какие-либо часто повторяющиеся конструктивные
элементы, на помощь приходит способность системы сохранять примитивы в
виде библиотечных элементов.
Кроме проектирования твёрдотельных моделей, SolidWorks поддерживает и
возможность поверхностного представления объектов. При работе с
поверхностями используются те же основные способы, что и при работе с
твёрдыми телами[10]. Возможно построение поверхностей, эквидистантных к
выбранным, а также импорт поверхностей из других систем с использованием
формата IGES.
Значительно упрощают работу многочисленные сервисные возможности,
такие как копирование выбранных конструктивных элементов по линии или по
кругу, зеркальное отображение как указанных примитивов или модели.

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
При редактировании конструктор может возвратить модель в состояние,
предшествовавшее созданию выбранного элемента. Это может потребоваться для
выполнения каких-либо действий, невозможных в текущий момент.
1.4 3D и натурное моделирование мобильных роботов и мехатронных систем
В настоящее время робототехника превратилась в развитую область
промышленности. Применения роботов исчисляются сотнями, и этот перечень
продолжает расти. Более миллиона промышленных роботов на человека. Сферы
и применения весьма разнообразны: несовместимая с жизнью и опасная для
здоровья природная и техногенная среда; технологически сложные, вредные и
опасные для человека производства, военное дело, легкая промышленность,
сельское хозяйство, транспорт, медицина, наука и система образования, торговля,
охрана правопорядка, сфера обслуживания и социальные службы, сфера досуга.
Роботы-манипуляторы широко используются в подводных исследованиях,
робототехника применяется в геологии и археологии, незаменима в спасательных
работах. Без роботов невозможно изучение космоса. Получили распространение
сервисные и потребительские роботы. Активно развиваются и пользуются
спросом симбиозные робототехнические системы (бионические костюмы и
экзоскелеты), которые увеличивают силу и возможности человека в несколько
раз. Мы являемся свидетелями начала внедрения роботизированного транспорта.
Уже сегодня современный автомобиль включает в себя роботизированные
системы (климат-контроль, роботизированные коробки передач, системы
управления двигателем при автоматической парковке и пр.). Сформирован и
развивается роботомаркетинг: применение роботов для рекламы и продаж
различных товаров и услуг (роботы-программы: финансовые роботы,
интерактивная медиа-реклама, вирусные кампании, сетевой таргетинг и др.;
физические роботы: промо-роботы, роботы-телеприсутствия и др.). Предложены
и реализованы интересные решения по робототехнике для медицины и системы
образования (роботизированные хирургические и диагностические комплексы,

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
роботы для домашнего, в том числе инклюзивного, обучения). В то же время и
сама робототехника становится мощным общим двигателем современной
индустрии[11]. Необходимость решения задач, которые ставят специалисты в
области роботостроения, стимулирует дополнительные исследования в
различных областях науки и технологий.
Разнообразие роботов определяется их востребованностью в различных
сферах жизнедеятельности общества, в том числе в сфере познания. Как
инструменты познания роботы уже весьма активно используются в научных и
научно-технических исследованиях. В научном познании роботы применяются
при проведении опытов. В научно-техническом исследовании они используются
с целью изучения других технических объектов (обнаружение, диагностика
состояния и пр.). Научно-техническое исследование может проводиться с целью
создания принципиально новых роботов или модернизации имеющихся, а также
поиска наиболее эффективных режимов их функционирования.
В системе научного познания технические знания и объекты техники
используются, как правило, с целью постановки опытов (наблюдений,
экспериментов). Натурный опыт, реализуемый с применением технологий
робототехники, может быть определен как роботизированный. Наблюдения и
эксперименты этого вида уже используются во многих областях научного знания
(исследования микромира, археология, подводные исследования, изучение
внутреннего строения человеческих органов, анализ молекулярной структуры
веществ, в том числе на наноуровне, исследования явлений и процессов в
условиях ближнего и дальнего космоса и др.). Необходимость роботизации
научных экспериментов определяется ключевыми функциями робота как
технического объекта. Робот способен заменить человека в опасных и чрезмерно
тяжелых экспериментальных работах, может решать поставленные задачи более
эффективно и, наконец, выполнять работу, которую человек просто не хочет
делать, освобождая себе время для решения сложных интеллектуальных задач,
пока еще недоступных роботу. Роботизированный эксперимент или наблюдение
отличают более качественная реализация процесса проведения, широкий спектр и

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
высокая точность регистрации данных, их автоматическое накопление,
обработка, полный и безошибочный формально-логический анализ, визуализация
хода опыта и его результатов[11].
В системе научно-технического познания робототехника представлена в
разном качестве.
1. Робот может служить эффективным инструментом исследования
уже созданных технических объектов, начиная с исследования уникальных
артефактов и заканчивая диагностикой состояния современной производственной
и сервисной техники (поиск дефектов, оценка их масштаба, выявление
несоответствия свойств объекта заданным показателям, предотвращение угрозы
технического сбоя в работе, брака в изготовлении и др.). Уже созданы и
функционируют различные роботизированные технологические комплексы
диагностики (РТКД). Это роботы, оснащенные датчиками и сканирующими
системами. Они перемещаются относительно объектов контроля, накапливают и
обрабатывают информацию об исследуемых объектах, передают сигналы о
состоянии этих объектов и его изменениях.
Применение робототехники в таких исследованиях исключает влияние
субъективных факторов на сбор и обработку информации об исследуемом
объекте, сокращает время поиска технического дефекта, повышает точность его
диагностики, обеспечивает проведение при необходимости диагностических
испытаний, а в ряде случаев и автоматическое устранении дефекта.
Наиболее известны как «исследователи» роботы-змеи, предназначенные
для поисково-спасательных работ в аварийных зданиях, для исследования и даже
ремонта трубопроводов сложных конфигураций, изучения подземных тоннелей и
т.п. Такие роботы постоянно совершенствуются, расширяется область их
применения.
2. Проектирование робота может являться целью научно-технического
исследования. Создание новых и более совершенных роботизированных систем –
одна из самых актуальных проблем современной инженерии. К задачам
инженерной деятельности относятся: выполнение аналитического исследования

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
технической проблемы, изобретение или модернизация технического объекта с
целью ее решения, изготовление и исследование модели данного объекта,
создание и внедрение реального технического объекта в соответствующую
область социальной практики, поддержка его роботы, своевременная диагностика
и устранение возникающих дефектов.
На современном этапе развития методов научно-технического познания
особое значение приобретают методы компьютерного моделирования.
Виртуальные модели в комплексе с реальным оборудованием позволяют
инженерам при проектировании технических устройств находить наиболее
целесообразные решения. С помощью специального программного обеспечения
может быть выполнена разработка полного цифрового макета робота. К таким
программным средам предъявляется целый ряд требований, а именно: 1)
возможность создания виртуальной модели робота подобной его реальной
физической модели; 2) возможность виртуального моделирования поведения
модели робота в среде, схожей с реальным физическим миром; 3) трехмерная
визуализация модели робота и ее поведения в виртуальной среде; 4) возможность
использования программ, написанных для виртуальной модели робота, для
аналогичного реального робота[11].
В настоящее время предпринимаются попытки создать такие среды и для
системы среднего образования. Известны продукты компании РобоЭд,
программное обеспечение LEGO для наборов LEGO Mindstorms, включая
программу LEGO Digital Designer, позволяющую моделировать статичные
конструкции роботов. Существуют альтернативные среды программирования:
среда LabVIEW с дополнительным модулем LabVIEW LEGOMINDSTORMS,
среда RobotC, среда VEX Assembler для наборов компании VEX Robotics.
Для натурного моделирования созданы специальные конструкторы по
образовательной робототехнике. Наиболее известна в России линейка наборов
Lego, а именно: Lego education WeDo, Lego MINDSTORMS EV3, Tetrix
(функционирует под управлением Lego). Используются наборы от фирмы Huna:
Fun&Bot, Kicky, Class, Top, Human-robot и др. С каждым годом число наборов по

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
образовательной робототехнике увеличивается, растет их качество, ширится
спектр возможностей в создании роботов различных видов и уровней сложности.
Отметим, что в учебной практике (как и в реальном производстве) технологии
виртуального и натурного моделирования роботов, как правило, реализуются
совместно.
3 3D-моделирование трицикла в среде SolidWorks
3.1 Моделирование деталей
Запускаем SolidWorks Premium 2013, выбираем пункт меню
«Файл»→«Новый», и в появившемся диалоговом окне выбираем «Деталь».
Сначала создадим шину.
Выбираем в дереве конструирования Feature Manager плоскость «Спереди»,
для этого используем панель инструментов «Вид», кнопку «Стандартные виды»,
выпадающую опцию «Перпендикулярно», поворачиваем плоскость.
Используя панель инструментов «Эскиз», кнопку «Эскиз», создаём эскиз на
плоскости.
Используя кнопки «Смещение объектов», «Зеркальное отображение
объектов», в панели инструментов «Эскиз», рисуем профиль шины, как показано
на рис. 8.
Рисунок 8 – Эскиз профиля шины

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
Затем, используя инструмент «Повернутая бобышка/основание» в панели
инструментов «Элементы», вытягиваем нарисованный эскиз на 0.50 мм,
используя при этом опцию «Тонкостенный элемент», после этого с помощью
функций «Справочная геометрия» и «Плоскость» в панели инструментов
«Элементы», перемещаем плоскость к получившейся шине и рисуем с помощью
эскиза в панели инструментов «Эскиз» шипы.
После этого в панели инструментов «Элементы», вытягиваем эти шипы на
2.70 мм с помощью функции «Вытянутая бобышка/основание» и делаем
«Круговой массив», растягиваем шипы по всей плоскости шины.
После этого с помощью панели инструментов «Внешние виды», которые
находятся в правом верхнем углу экрана, закрашиваем шину в черный цвет.
Внешний вид шины представлен на рис. 9.
Рисунок 9 – Внешний вид шины
Переходим к созданию следующей детали-1.

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
Выбираем пункт меню «Файл»→«Новый», и в появившемся диалоговом
окне выбираем «Деталь».
Выбираем в дереве конструирования Feature Manager плоскость «Спереди»,
для этого используем панель инструментов «Вид», кнопку «Стандартные виды»,
выпадающую опцию «Перпендикулярно», поворачиваем плоскость.
Используя панель инструментов «Эскиз», кнопку «Эскиз», создаём эскиз на
плоскости.
Используя кнопку «Прямоугольник» в панели инструментов «Эскиз»
рисуем прямоугольник размером 14х14 как показано на рис. 10.
Рисунок 10 - Эскиз профиля детали-1
Затем, используя инструмент «Вытянутая бобышка/основание»
панели инструментов «Элементы», вытягиваем нарисованный эскиз на 14 мм.
После этого на плоскости создаем окружности размером 4 мм с
помощью кнопок «Окружность» и «Зеркально отразить объекты» в панели
инструментов «Эскиз». Затем, используя инструмент «Вытянутый вырез» в
панели инструментов «Элементы» вырезаем насквозь нарисованные эскизы.

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
Теперь создаем крепеж на плоскости детали с помощью кнопки
«Прямоугольник» в панели инструментов «Эскиз» размерами 2х2 и 3,8х3,8
соответственно.
Затем, используя инструмент «Вытянутая бобышка/основание» в
панели инструментов «Элементы» вытягиваем эскизы на 0.70 мм и 1.30 мм
соответственно.
После этого скругляем крепеж на 1.30 мм, используя инструмент
«Скругление» в панели инструментов «Элементы».
После этого с помощью панели инструментов «Внешние виды», которые
находятся в правом верхнем углу экрана, закрашиваем деталь-1 в черный цвет.
Внешний вид детали представлен на рис. 11.
Рисунок 11 – Внешний вид детали-1
Аналогично были построены еще 4 таких же детали и 6 деталей-2.
Отличием Детали-2 от детали-1 является её длина. Она составляет 29
мм.

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
Рисунок 12 – Внешний вид детали-2
Переходим к созданию диска для малого колеса.
Используя панель инструментов «Эскиз», кнопку «Эскиз», создаём эскиз на
плоскости.
С помощью инструментов «Линия», «Скругление», «Смещение
объектов» и «Зеркально отразить объекты» создаем эскиз профиль диска
как показано на рис. 13
Рисунок 13 – Эскиз профиля диска для малого колеса

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
Далее с помощью инструментов «Вытянутая бобышка/основание»,
«Вырез-вытянуть» и «Круговой массив» на панели инструментов «Элементы»
создаем внешний вид диска для малого колеса.
После этого с помощью панели инструментов «Внешние виды», которые
находятся в правом верхнем углу экрана, закрашиваем диск для малого колеса в
красный цвет.
Внешний вид детали представлен на рис. 14
Рисунок 14 – Внешний вид диска для малого колеса
Переходим к созданию диска для большого колеса.
Используя панель инструментов «Эскиз», кнопку «Эскиз», создаём эскиз на
плоскости.
С помощью инструментов «Линия» и «Автоматическое нанесение
размеров» создаем эскиз профиля диска как показано на рис. 15

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
Рисунок 15 - Эскиз профиля диска для большого колеса
Далее с помощью инструментов «Вытянутая бобышка/основание»,
«Вырез-вытянуть», «Вырез по траектории» и «Скругление» на панели
инструментов «Элементы» создаем внешний вид диска для большого колеса.
После этого с помощью панели инструментов «Внешние виды», которые
находятся в правом верхнем углу экрана, закрашиваем диск для большого колеса
в серый цвет.
Внешний вид детали представлен на рис. 16

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
Рисунок 16 - Внешний вид диска для большого колеса
Переходим к созданию шины-2.
Используя панель инструментов «Эскиз», кнопку «Эскиз», создаём эскиз на
плоскости.
С помощью инструмента «Окружность» создаем профиль шины-2 как
показано на рис. 17

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
Рисунок 17 – Эскиз профиля шины-2
Далее с помощью инструментов «Вытянутая бобышка/основание»,
«Вытянуть-Тонкостенный», «Скругление», «Оболочка» и «Кругового массива»
на панели инструментов «Элементы» создаем внешний профиль шины-2.
После этого в панели инструментов «Элементы», вытягиваем эти шипы на
2 мм с помощью функции «Вытянутая бобышка/основание» и делаем «Круговой
массив», растягиваем шипы по всей плоскости шины-2.
После этого с помощью панели инструментов «Внешние виды», которые
находятся в правом верхнем углу экрана, закрашиваем шину-2 в черный цвет.
Внешний вид детали представлен на рис. 18

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
Рисунок 18 – Внешний вид шины-2
Переходим к созданию детали-3
Используя панель инструментов «Эскиз», кнопку «Эскиз», создаём эскиз на
плоскости.
С помощью инструментов «Линия» и «Автоматическое нанесение
размеров» создаем эскиз профиля детали-3, угол которой будет равен 15,25º, как
показано на рис. 19

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
Рисунок 19 – Эскиз профиля детали-3
Далее с помощью инструментов «Вытянутая бобышка/основание»,
«Вырез-вытянуть», «Скругление» на панели инструментов «Элементы» создаем
внешний профиль детали-3.
После этого с помощью панели инструментов «Внешние виды», которые
находятся в правом верхнем углу экрана, закрашиваем деталь-3 в красный цвет.
Внешний вид детали представлен на рис. 20
Рисунок 20 – Внешний вид детали-3
Аналогично были построены еще 2 таких же детали-4 и детали-5.
Отличием детали-4 и детали-5 от детали-3 являются их углы. Они
составляют 7,5º и 30º соответственно. Также у детали-5 строится другое
отверстие под крепеж.
Рисунок 21 – Внешний вид детали-4

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
Рисунок 22 – Внешний вид детали-5
Переходим к созданию детали-6
Используя панель инструментов «Эскиз», кнопку «Эскиз», создаём эскиз на
плоскости.
С помощью инструментов «Линия», «Прямоугольник» и
«Окружность» создаем эскиз профиля детали-6 как показано на рис. 23
Рисунок 23 – Эскиз профиля детали-6
Далее с помощью инструментов «Вытянутая бобышка/основание»,
«Вырез-вытянуть», «Скругление» на панели инструментов «Элементы» создаем
внешний профиль детали-6.
После этого с помощью панели инструментов «Внешние виды», которые
находятся в правом верхнем углу экрана, закрашиваем деталь-6 в черный цвет.
Внешний вид детали представлен на рис. 24

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
Рисунок 24 – Внешний вид детали-6
Переходим к созданию детали-7
Используя панель инструментов «Эскиз», кнопку «Эскиз», создаём эскиз на
плоскости.
С помощью инструментов «Линия», «Прямоугольник» и
«Окружность» создаем эскиз профиля детали-7 как показано на рис. 25
Рисунок 25 – Эскиз профиля детали-7
Далее с помощью инструментов «Вытянутая бобышка/основание»,
«Вырез-вытянуть», «Скругление» на панели инструментов «Элементы» создаем
внешний профиль детали-7.
После этого с помощью панели инструментов «Внешние виды», которые
находятся в правом верхнем углу экрана, закрашиваем деталь-7 в красный цвет.
Внешний вид детали представлен на рис. 26

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
Рисунок 26 – Внешний вид детали-7
Переходим к созданию детали-8
Используя панель инструментов «Эскиз», кнопку «Эскиз», создаём эскиз на
плоскости.
С помощью инструментов «Линия» и «Окружность» создаем эскиз
профиля детали-8 как показано на рис. 27
Рисунок 27 - Эскиз профиля детали-8
Далее с помощью инструментов «Вытянутая бобышка/основание»,
«Вырез-вытянуть», «Скругление» на панели инструментов «Элементы» создаем
внешний профиль детали-8.
После этого с помощью панели инструментов «Внешние виды», которые
находятся в правом верхнем углу экрана, закрашиваем деталь-8 в красный цвет.

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
Внешний вид детали представлен на рис. 28
Рисунок 28 - Внешний вид детали-8
Переходим к созданию детали-9
Используя панель инструментов «Эскиз», кнопку «Эскиз», создаём эскиз на
плоскости.
С помощью инструментов «Окружность» и «Прямоугольник» создаем
эскиз профиля детали-9 как показано на рис. 29
Рисунок 29 - Эскиз профиля детали-9
Далее с помощью инструментов «Вытянутая бобышка/основание» и
«Вырез-вытянуть» на панели инструментов «Элементы» создаем внешний
профиль детали-9.
После этого с помощью панели инструментов «Внешние виды», которые
находятся в правом верхнем углу экрана, закрашиваем деталь-9 в черный цвет.
Внешний вид детали представлен на рис. 30

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
Рисунок 30 - Внешний вид детали-9
Переходим к созданию детали-10
Используя панель инструментов «Эскиз», кнопку «Эскиз», создаём эскиз на
плоскости.
С помощью инструментов «Окружность» и «Прямоугольник» создаем
эскиз профиля детали-10 как показано на рис. 31
Рисунок 31 - Эскиз профиля детали-10
Далее с помощью инструментов «Вытянутая бобышка/основание» и
«Вырез-вытянуть» на панели инструментов «Элементы» создаем внешний
профиль детали-10.
После этого с помощью панели инструментов «Внешние виды», которые
находятся в правом верхнем углу экрана, закрашиваем деталь-10 в красный цвет.
Внешний вид детали представлен на рис. 32

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
Рисунок 32 - Внешний вид детали-10
Переходим к созданию детали-11
Используя панель инструментов «Эскиз», кнопку «Эскиз», создаём эскиз на
плоскости.
С помощью инструментов «Прямоугольник», «Фаски» и «Зеркально
отразить объекты» создаем эскиз профиля детали-11 как показано на рис. 33 и 34

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
Рисунок 33, 34 - Эскиз профиля детали-11
Далее с помощью инструментов «Вытянутая бобышка/основание» и
«Вырез-вытянуть» на панели инструментов «Элементы» создаем внешний
профиль детали-11. Вырезы у этой детали делаем с двух сторон.
После этого с помощью панели инструментов «Внешние виды», которые
находятся в правом верхнем углу экрана, закрашиваем деталь-11 в красный цвет.
Внешний вид детали представлен на рис. 35
Рисунок 35 - Внешний вид детали-11
Переходим к созданию детали-12
Используя панель инструментов «Эскиз», кнопку «Эскиз», создаём эскиз на
плоскости.

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
С помощью инструмента «Прямоугольник» создаем эскиз профиля
детали-12 как показано на рис. 36
Рисунок 36 - Эскиз профиля детали-12
Далее с помощью инструментов «Вытянутая бобышка/основание»,
«Вырез-вытянуть» и «Скругление» на панели инструментов «Элементы» создаем
внешний профиль детали-12.
После этого с помощью панели инструментов «Внешние виды», которые
находятся в правом верхнем углу экрана, закрашиваем деталь-12 в красный цвет.
Внешний вид детали представлен на рис. 37
Рисунок 37 - Внешний вид детали-12

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
Аналогично была построена такая же деталь-13.
Отличием Детали-13 от детали-12 является её длина. Она составляет 4 мм.
Рисунок 38 - Внешний вид детали-13
Переходим к созданию детали-14
Используя панель инструментов «Эскиз», кнопку «Эскиз», создаём эскиз на
плоскости.
С помощью инструмента «Прямоугольник» создаем эскиз профиля
детали-14 как показано на рис. 39
Рисунок 39 - Эскиз профиля детали-14

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
Далее с помощью инструментов «Вытянутая бобышка/основание» и
«Скругление» на панели инструментов «Элементы» создаем внешний профиль
детали-14.
После этого с помощью панели инструментов «Внешние виды», которые
находятся в правом верхнем углу экрана, закрашиваем деталь-14 в красный цвет.
Внешний вид детали представлен на рис. 40
Рисунок 40 - Внешний вид детали-14
Переходим к созданию детали-15
Используя панель инструментов «Эскиз», кнопку «Эскиз», создаём эскиз на
плоскости.
С помощью инструмента «Прямоугольник» создаем эскиз профиля
детали-15 как показано на рис. 41
Рисунок 41 - Эскиз профиля детали-15

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
Далее с помощью инструментов «Повернутая бобышка/основание» и
«Скругление» на панели инструментов «Элементы» создаем внешний профиль
детали-15.
После этого с помощью панели инструментов «Внешние виды», которые
находятся в правом верхнем углу экрана, закрашиваем деталь-15 в черный цвет.
Внешний вид детали представлен на рис. 42
Рисунок 42 - Внешний вид детали-15
Переходим к созданию детали-16
Используя панель инструментов «Эскиз», кнопку «Эскиз», создаём эскиз на
плоскости.
С помощью инструмента «Окружность» создаем эскиз профиля
детали-16 как показано на рис. 43
Рисунок 43 - Эскиз профиля детали-16
Далее с помощью инструментов «Вытянутая бобышка/основание» и
«Вырез-вытянуть» на панели инструментов «Элементы» создаем внешний
профиль детали-16.
После этого с помощью панели инструментов «Внешние виды», которые
находятся в правом верхнем углу экрана, закрашиваем деталь-16 в красный цвет.
Внешний вид детали представлен на рис. 44

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
Рисунок 44 - Внешний вид детали-16
Переходим к созданию детали-17
Используя панель инструментов «Эскиз», кнопку «Эскиз», создаём эскиз на
плоскости.
С помощью инструментов «Прямоугольник», «Сплайн» и «Отсечь
объекты» создаем эскиз профиля детали-17 как показано на рис. 45
Рисунок 45 - Эскиз профиля детали-17
Далее с помощью инструментов «Вытянутая бобышка/основание» и
«Скругление» на панели инструментов «Элементы» создаем внешний профиль
детали-17.

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
После этого с помощью панели инструментов «Внешние виды», которые
находятся в правом верхнем углу экрана, закрашиваем деталь-17 в красный цвет.
Внешний вид детали представлен на рис. 46
Рисунок 46 - Внешний вид детали-17
Переходим к созданию детали-18
Используя панель инструментов «Эскиз», кнопку «Эскиз», создаём эскиз на
плоскости.
С помощью инструментов «Линия» и «Автоматическое нанесение
размеров» создаем эскиз профиля детали-18 как показано на рис. 47

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
Рисунок 47 - Эскиз профиля детали-18
Далее с помощью инструментов «Вытянутая бобышка/основание» и
«Скругление» на панели инструментов «Элементы» создаем внешний профиль
детали-18.
После этого с помощью панели инструментов «Внешние виды», которые
находятся в правом верхнем углу экрана, закрашиваем деталь-18 в красный цвет.
Внешний вид детали представлен на рис. 48
Рисунок 48 - Внешний вид детали-18
Переходим к созданию сидения
Используя панель инструментов «Эскиз», кнопку «Эскиз», создаём эскиз на
плоскости.
С помощью инструментов «Линия» и «Автоматическое нанесение
размеров» создаем эскиз профиля сидения как показано на рис. 49 и 50

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
Рисунок 49, 50 - Эскиз профиля сидения
Далее с помощью инструментов «Вытянутая бобышка/основание» и
«Вырез-вытянуть» на панели инструментов «Элементы» создаем внешний
профиль сидения.
После этого с помощью панели инструментов «Внешние виды», которые
находятся в правом верхнем углу экрана, закрашиваем сидение в черный цвет.
Внешний вид детали представлен на рис. 51

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
Рисунок 51 - Внешний вид сидения
Переходим к созданию двигателя
Используя панель инструментов «Эскиз», кнопку «Эскиз», создаём эскиз на
плоскости.
С помощью инструментов «Прямоугольник», «Окружность», «Фаски»
и «Зеркально отразить объекты» создаем эскиз двигателя как показано на рис. 52
и 53

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
Рисунок 52, 53 - Эскиз профиля двигателя
Далее с помощью инструментов «Вытянутая бобышка/основание»,
«Вырез-вытянуть», «Фаска» и «Линейный массив» на панели инструментов
«Элементы» создаем внешний профиль двигателя.
После этого с помощью панели инструментов «Внешние виды», которые
находятся в правом верхнем углу экрана, закрашиваем двигатель в цвет матового
стекла.
Внешний вид детали представлен на рис. 54
Рисунок 54 - Внешний вид двигателя
Переходим к созданию детали-19
Используя панель инструментов «Эскиз», кнопку «Эскиз», создаём эскиз на
плоскости.

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
С помощью инструментов «Окружность», «Линия» и «Скругление»
создаем эскиз профиля детали-19 как показано на рис. 55 и 56
Рисунок 55, 56 - Эскиз профиля детали-19
Далее с помощью инструментов «Бобышка/основание по сечениям»,
«Вырез по сечениям», «Ребро», «Зеркальное отражение» и «Вытянутая
бобышка/основание» на панели инструментов «Элементы» создаем внешний
профиль детали-19.
После этого с помощью панели инструментов «Внешние виды», которые
находятся в правом верхнем углу экрана, закрашиваем деталь-19 в красный цвет.
Внешний вид детали представлен на рис. 57
Рисунок 57 - Внешний вид детали-19

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
Переходим к созданию детали-20
Используя панель инструментов «Эскиз», кнопку «Эскиз», создаём эскиз на
плоскости.
С помощью инструментов «Окружность» и «Линия» создаем эскиз
профиля детали-20 как показано на рис. 58
Рисунок 58 - Эскиз профиля детали-20
Далее с помощью инструментов «Вытянутая бобышка/основание» и
«Вырез-вытянуть» на панели инструментов «Элементы» создаем внешний
профиль детали-20.
После этого с помощью панели инструментов «Внешние виды», которые
находятся в правом верхнем углу экрана, закрашиваем деталь-20 в красный цвет.
Внешний вид детали представлен на рис. 59

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
Рисунок 59 - Внешний вид детали-20
Переходим к созданию детали-21
Используя панель инструментов «Эскиз», кнопку «Эскиз», создаём эскиз на
плоскости.
С помощью инструментов «Прямоугольник» и «Линия» создаем эскиз
профиля детали-21 как показано на рис. 60
Рисунок 60 - Эскиз профиля детали-21
Далее с помощью инструментов «Вытянутая бобышка/основание» и
«Скругление» на панели инструментов «Элементы» создаем внешний профиль
детали-21.
После этого с помощью панели инструментов «Внешние виды», которые
находятся в правом верхнем углу экрана, закрашиваем деталь-21 в красный цвет.

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
Внешний вид детали представлен на рис. 61
Рисунок 61 - Внешний вид детали-21
3.2 Моделирование сборки 3D и натурное
Запускаем SolidWorks Premium 2013, выбираем пункт меню
«Файл»→«Новый», и в появившемся диалоговом окне выбираем «Сборка».
Создаем первый узел сборки.
Используя панель инструментов «Сборка», кнопку «Вставить
компоненты», добавляем детали, которые мы смоделировали.
Выбираем в дереве конструирования Feature Manager детали с помощью
окна выбора деталей «Деталь/сборка для вставки» и выбираем следующие
детали: двигатель, деталь-1, деталь-4, деталь-12, деталь-13, деталь-5, деталь-14,
деталь-16, деталь-18 и деталь-19.
С помощью панели инструментов «Сборка» и кнопки «Условия
сопряжения», обозначаем какие грани и поверхности должны быть сопряжены.
Для того, чтобы сделать нужное сопряжение, во вкладке «Стандартные
сопряжения» можно выбрать различные их виды. Если деталь находится в другом
положении с помощью функции «Переместить с системой координат», которая
вызывается из меню правым щелчком мыши, можно повернуть деталь, чтобы
было меньше проблем несоответствия при сборке трицикла.
Получаем первый узел сборки, который показан на рис. 62

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
Рисунок 62 – Первый узел сборки
Приступаем к созданию второго узла.
Выбираем в дереве конструирования Feature Manager детали с помощью
окна выбора деталей «Деталь/сборка для вставки» и выбираем следующие
детали: сидение, деталь-1, деталь-2, деталь-3, деталь-11, деталь-13, деталь-17,
деталь-20 и деталь-21.
С помощью панели инструментов «Сборка» и кнопки «Условия
сопряжения», обозначаем какие грани и поверхности должны быть сопряжены.
Получаем второй узел сборки, который показан на рис. 63

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
Рисунок 63 – Второй узел сборки
Приступаем к созданию третьего узла.
Выбираем в дереве конструирования Feature Manager детали с помощью
окна выбора деталей «Деталь/сборка для вставки» и выбираем следующие
детали: деталь-1, деталь-3, деталь-4, деталь-8, деталь-9 и деталь-10.
С помощью панели инструментов «Сборка» и кнопки «Условия
сопряжения», обозначаем какие грани и поверхности должны быть сопряжены.
Получаем третий узел сборки, который показан на рис. 64

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
Рисунок 64 – Третий узел сборки
Приступаем к созданию четвертого и пятого узла.
Выбираем в дереве конструирования Feature Manager детали с помощью
окна выбора деталей «Деталь/сборка для вставки» и выбираем следующие
детали: деталь-1, деталь-6, деталь-7, деталь-10, деталь-15, диск для малого колеса
и шина-2.
С помощью панели инструментов «Сборка» и кнопки «Условия
сопряжения», обозначаем какие грани и поверхности должны быть сопряжены.
Получаем четвертый и пятый узел сборки, который показан на рис. 65

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
Рисунок 65 – Четвертый и пятый узел сборки
Приступаем к созданию шестого узла.
Выбираем в дереве конструирования Feature Manager детали с помощью
окна выбора деталей «Деталь/сборка для вставки» и выбираем следующие
детали: диск для большого колеса, шина, диск для малого колеса и шина-2.
С помощью панели инструментов «Сборка» и кнопки «Условия
сопряжения», обозначаем какие грани и поверхности должны быть сопряжены.
Получаем шестой узел сборки, который показан на рис. 66

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
Рисунок 66 – Шестой узел сборки
После создания всех шести узлов сборки, с помощью функции
«Условие сопряжения» на панели инструментов «Сборка», собираем все узлы в
единую 3D-модель.
Получаем 3D-модель сборки трицикла, который показан на рис. 67 и 68

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
Рисунок 67 и 68 – 3D-модель сборки трицикла

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
Содержание деятельности инженера состоит в изобретении,
проектировании (конструировании и анализе), изготовлении, эксплуатации
и утилизации технических объектов и систем. Указанные виды
деятельности напрямую связаны с этапами жизненного цикла
соответствующего изделия. Вне зависимости от назначения технической
системы, её функционирование связано с преобразованием энергии и
информации из одних форм в другие. При этом процессы преобразования
сопровождаются, во-первых, совершением работы (физической и
интеллектуальной), во-вторых – потерей части энергии и информации. Для
современных технических систем характерно то, что при их
функционировании энергетические и информационные процессы
протекают в явно выраженной интегрированной форме[12].
Если сформулировать основную задачу инженерной деятельности в
общем виде, то она сводится к минимизации потерь энергии и информации,
т.е. к повышению К.П.Д., а также к минимизации используемых ресурсов
(энергии, материи (вещества), пространства, времени и информации).
Понятие «Информация» заслуживает, на мой взгляд, в этом ряду
фундаментальных категорий особого внимания. Это обусловлено бурным
развитием и непрерывно возрастающим значением систем
автоматизированного проектирования (САПР), т.е. информационных
технологий CAD /CAM /CAE /CAPP /PDM /PLM - типа в конструкторско-
технологическом обеспечении современных производств и реализации
жизненного цикла изделия в целом.
Современные САПР относятся к наиболее наукоёмкому и
высокотехнологичному виду программного обеспечения и достигли в
своём развитии весьма высокого уровня сложности. В связи с этим любые
новые и оригинальные идеи в этой области при их реализации с «нулевого
уровня», сталкиваются со значительными трудностями, прежде всего
состоящими в высокой трудоёмкости. Инструмент решения этой проблемы
заложен в структуру самих САПР и обеспечивается комплексом средств и

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
технологий, состоящих в программном интерфейсе приложения (API,
ApplicationProgramInterface). API позволяет получать доступ к функционалу
САПР извне, а также расширять и дополнять базовый функционал уже
существующих САПР.
Этот факт имеет важное значение и проявляет себя в разных
предметных областях, связанных как с внедрением, эксплуатацией и
разработкой САПР, так и с проблемами инженерного образования.
Современные технологии программирования, в частности, объектно-
ориентированное (ООП) создают базу для построения моделей технических
систем в интегрированной форме с глубокой степенью интеграции,
предусматривающей как кумулятивную, так и интерактивную
составляющие. Принципы, положенные в основу ООП, в частности
инкапсуляция, наследование, полиморфизм, абстракция классов позволяют
реализовать процесс программирования непосредственно в терминах
математических, естественнонаучных и технических дисциплин. Таким
образом, концептуальная, математическая, алгоритмическая и программная
модели представляют собой, по существу, единое целое. Численная модель
начинает свое существование в процессе выполнения программы, когда она
наполняется некоторым набором исходных данных[12].
Будучи построенным на принципах ООП, API полностью
соответствует данному интегрированному подходу к моделированию,
который следует рассматривать как междисциплинарный. Однако
совместное применение ООП и API придает рассматриваемой мной модели
иной качественный вид. Дело в том, что созданные с использованием API
приложения, (т.н. AddIn-приложения) функционируют в адресном
пространстве «родительской» САПР, связаны с конкретными 3D моделями,
а процесс разработки и отладки такого приложения неразрывно связан с
этой САПР, должен отвечать её концепции и внутренней структуре.
Таким образом, численная составляющая исходной модели
интегрируется в данном случае со всеми другими составляющими на более

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
высоком уровне интеграции, а целостность модели означает нечто большее,
чем простую сумму её составных частей.
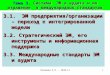
Рисунок 69 - Моделирование на базе ООП и ООП-API к
программированию
Характерной особенностью деятельности инженера является
практическая направленность, основанная на научном знании,
объединяющая в себе ремесло и искусство. О ремесле говорится в том
смысле, что инженер в своём творчестве проявляет личное умение мастера,
связанное с реальностью и полезностью решаемой задачи. Однако при этом
предполагается высокий уровень творчества, результат которого
неповторим и оценивается не только по критериям технической и
экономической эффективности, но и в терминах эстетических: хорошо
летают только красивые самолёты, уродливый корабль не поплывёт и т.д.
[13].
В этой связи необходимо отметить два обстоятельства: 1)
инженерное образование невозможно без фундаментального научного
знания; 2) процессуальный (технологический) аспект технического

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
образования (рис. 62) играет важную роль и должен быть наполнен
конкретным содержанием.
ЗАКЛЮЧЕНИЕ
В результате выполнения данной работы мною были изучены основные
возможности системы автоматизированного проектирования SolidWorks, как
интегрированной среды моделирования и инженерного анализа.
Главная цель моей работы – это создание натурной модели и дальнейшее её
воплощение в трехмерном пространстве с помощью инструментов SolidWorks.
В ходе проектирования трицикла на первом этапе была собрана его
натурная модель из деталей конструктора Fischertechnik (profi). А в процессе
создания его 3D модели были задействованы возможности среды SolidWorks.
Были построены сначала отдельные детали трицикла, затем произведена его
окончательная сборка посредством сопряжения деталей в узлы.
С каждым годом системы автоматизированного проектирования
приобретают все новые функциональные возможности, позволяющие
пользователям решать различные производственные задачи. Конкурентная
ситуация на рынке информационных технологий и динамика его развития
таковы, что каждый разработчик программного обеспечения стремится занять
свою нишу, найти свое ноу-хау, которое сможет выделить его продукт из
множества других.Поэтому в настоящее время особенно актуальным становится
наличие в САПР не только хороших функциональных возможностей и удобного
пользовательского интерфейса, но и широкого набора прикладных модулей,
решающих специализированные задачи, присущие определенным отраслям
промышленности. Таким образом, особую важность приобретает комплексность
предлагаемого решения.

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
Концептуальные идеи, положенные разработчиками в основу SolidWorks, и
такие качества, как интуитивно понятный интерфейс, русификация и поддержка
ЕСКД, предопределяют успех внедрения SolidWorks на предприятиях
отечественной промышленности. Именно поэтому, выбирая SolidWorks в
качестве базовой САПР, предприятие получает не только хороший, качественный
и функциональный набор программ, но и ориентируется на самые передовые
технологии, ставшие стандартом де-факто для автоматизированного
проектирования во всём мире.
Чтобы быть востребованным в своей профессии, инженер-конструктор
должен владетьсовременными компьютерными программами, быть в курсе
новейших технологий и стремиться внедрить их в производственный процесс.
Для этого, инженеры должны проходить подготовку и получать необходимые
знания и навыки для работы в системах автоматизированного проектирования.

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1 Алямовский А.А. SolidWorks 2007/2008. Компьютерное моделирование в
инженерной практике / А.А. Алямовский, А.А. Собачкин, Е.В. Одинцов, А.И.
Харитонович, Н.Б. Понамарев. – СПб.: БХВ-Петербург, 2008. – 1040 с.: ил.
2 Прохоренко В.П. SolidWorks. Практическое руководство. / В.П.
Прохоренко. – М.: ООО «Бином-Пресс», 2004. – 448 с.: ил.
3 Большаков В.П., Бочков А.Л., Сергеев А.А. 3D-моделирование в
AutoCAD, SolidWorks, Inventor, T-Flex: Учебный курс. – СПб.: Питер, 2011. – 336
с.: ил.
4 АлямовскийА.А. SolidWorks/CosmosWorks. Инженерный анализ методом
конечных элементов / А.А. Алямовский. – М.: ДМК Пресс, 2004. – 432 с.
5 Прерис А.М. SolidWorks 2005/2006. Учебный курс. / А.М. Прерис. – СПб.:
Питер, 2006. – 528 с.: ил.
6 Тику Ш. Эффективная работа: SolidWorks 2004. / Ш. Тику. – Спб.: Питер,
2005. – 768 с.: ил.
7 Воронин А.В. Моделирование мехатронных систем: учебное пособие. –
Томск: Изд-во Томского политехнического университета, 2008. – 137 с.
8 Егоров О.Д., Подураев Ю.В., Бубнов М.А. Робототехнические
мехатронные системы. Станкин, 2015. – 328 с.
9 Аведьян А. Б., Викентьев Е. Е. SolidWorks API – универсальная
платформа для интеграции инженерных и бизнес-приложений //САПР и графика.
2006, № 6. С.32–40.

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
10 Аверченков В.И., Казаков Ю.М. Автоматизация проектирования
технологических процессов: учеб.пособие для вузов [электронный ресурс] – 2-е
изд., стереотип. – М.: ФЛИНТА, 2011. – 229 с.
11 Ершов М.Г. Применение элементов образовательной робототехники как
средства реализации политехнической направленности обучения физике.
Диссертация на соискание ученой степени кандидата педагогических наук.
Екатеринбург, 2015. – 240 с.
12 Борискин С.И., Душин И.Ф., Ефанов С.А., Чугунов М.В., Полунина И.Н.
Авторизованное обучение как фактор повышения качества инженерного
образования.
13 Чугунов М.В., Масленникова Л.В., Полунина И.Н. Проектирование
информационно-образовательной среды технического вуза на основе
междисциплинарного и трансдисциплинарного подхода.
14 ГОСТ 12.0.004-90. Система стандартов безопасности труда. Организация
обучения по безопасности труда. Общие положения.
http://vsegost.com/Catalog/41/41131.shtml
15 ГОСТ 12.0.003-74. Система стандартов безопасности труда. Опасные и
вредные производственные факторы. Классификация.
http://vsegost.com/Catalog/41/41131.shtml
16 Девисилов В.А. Охрана труда: учебник / В.А. Девисилов. – 4-е изд.,
перераб. и доп. – М.: ФОРУМ, 2009. - 496 с.: ил. – (Профессиональное
образование).
17 Белов С.В. Безопасность жизнедеятельности: учебник для вузов/ [С.В.
Белов, А.В. Ильницкая, А.Ф. Козьяков и др.]; под общей ред. С.В. Белова. – 7-е
изд., стер. – М.: Высш. шк., 2007. – 616 с.: ил.
18 Ноздрачева О. Компьютер, здоровье и труд: (Рабочее место, влияние на
здоровье, медосмотры) // Все об охране труда. – 2008. - №11. – С.20-21

Изм. Лист № докум. Подпись
Дата
Лист
42ОП-02069964-У-ОТД-16
19 Обеспечения пожарной безопасности вычислительных центров.
http://digistyle.info/obespecheniya-pozharnoj-bezopasnosti-vychislitelnyx-centrov.htm
20 Стандарт организации СТО МордГУ 006-2014 «Система менеджмента
качества», Саранск, 2014. – 50 с.