Embed Size (px)
Citation preview

1
El kit robótico básico programable para todos
Paso a paso desde el comienzo hasta la inteligencia robótica con sensores
Reflectores Luz Switch Luz LED
Kit robótico programable disfrutado por todos que incluye partes para armar, un microcontrolador, sensores y un software de programación fácil de usar que emplea el lenguaje icónico logo, basado en gráficos
Sensores
2
Requerimientos del sistema
Hardware
Software
Cable UCON-200
Cable JST3AA-8
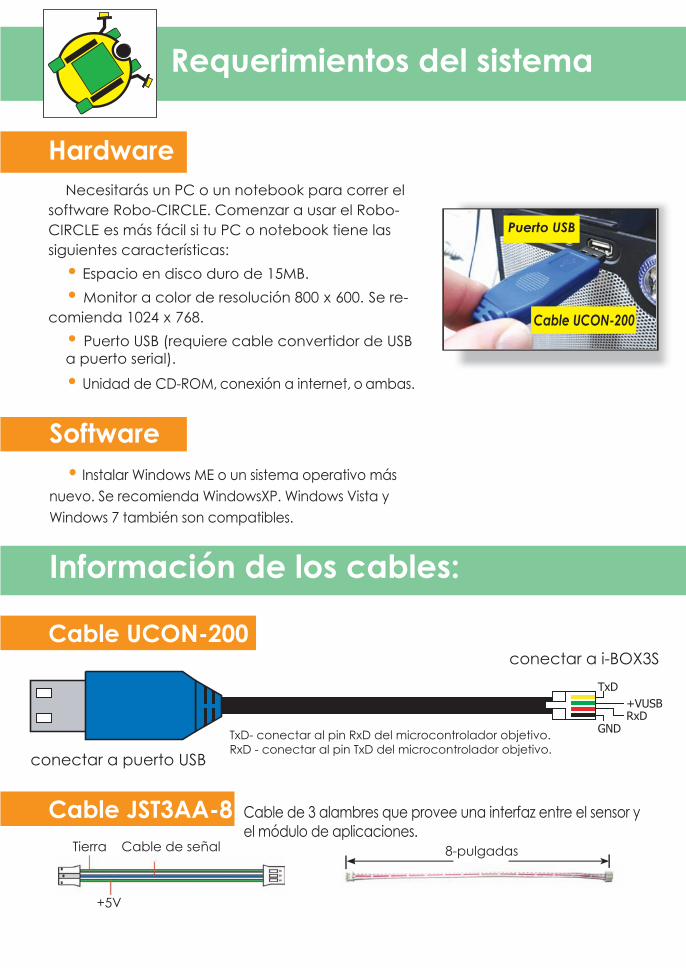
Necesitarás un PC o un notebook para correr el software Robo-CIRCLE. Comenzar a usar el Robo-CIRCLE es más fácil si tu PC o notebook tiene las siguientes características:
• Espacio en disco duro de 15MB.• Monitor a color de resolución 800 x 600. Se re-
comienda 1024 x 768.• Puerto USB (requiere cable convertidor de USB a puerto serial).
• Unidad de CD-ROM, conexión a internet, o ambas.
• Instalar Windows ME o un sistema operativo más nuevo. Se recomienda WindowsXP. Windows Vista yWindows 7 también son compatibles.
Cable de 3 alambres que provee una interfaz entre el sensor yel módulo de aplicaciones.
conectar a puerto USB
conectar a i-BOX3S
+5V
Información de los cables:
Tierra Cable de señal 8-pulgadas
Puerto USB
Cable UCON-200
TxD- conectar al pin RxD del microcontrolador objetivo.RxD - conectar al pin TxD del microcontrolador objetivo.
3
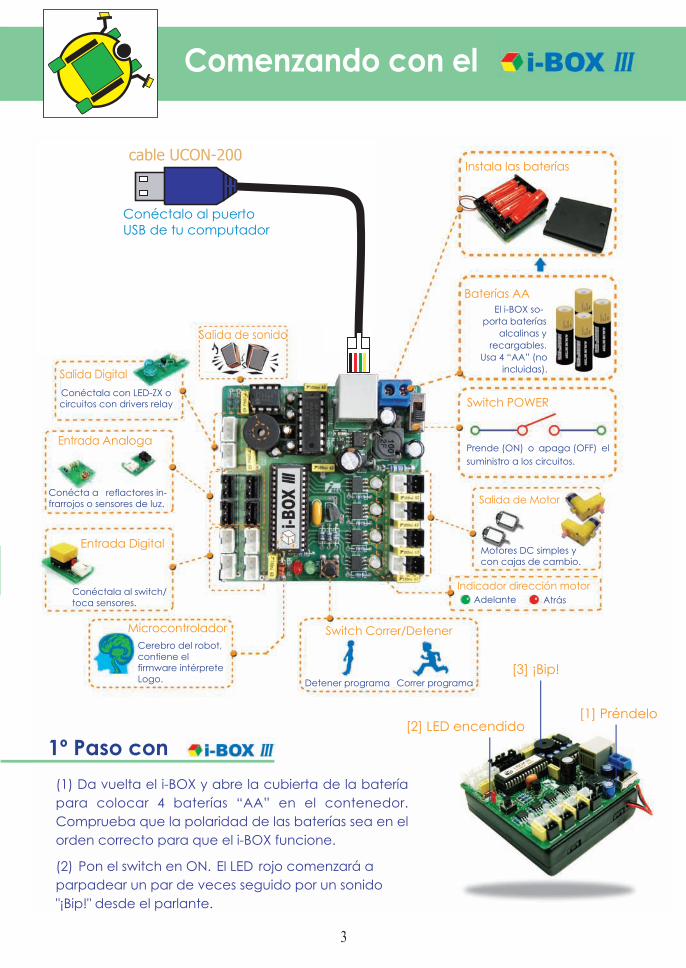
Comenzando con el
Conéctala con LED-ZX o circuitos con drivers relay
Conécta a reflactores in-frarrojos o sensores de luz.
Conéctala al switch/toca sensores.
Cerebro del robot,contiene el firmware intérprete Logo. Detener programa
Adelante
Motores DC simples y con cajas de cambio.
Prende (ON) o apaga (OFF) el suministro a los circuitos.
El i-BOX so-porta baterías
alcalinas y recargables.
Usa 4 “AA” (noincluidas).
Atrás
Correr programa
Salida Digital
Salida de sonido
Entrada Analoga
Entrada Digital
Microcontrolador Switch Correr/Detener
1º Paso con (1) Da vuelta el i-BOX y abre la cubierta de la batería para colocar 4 baterías “AA” en el contenedor. Comprueba que la polaridad de las baterías sea en el orden correcto para que el i-BOX funcione.
(2) Pon el switch en ON. El LED rojo comenzará a parpadear un par de veces seguido por un sonido "¡Bip!" desde el parlante.
Indicador dirección motor
Salida de Motor
Switch POWER
Baterías AA
Instala las baterías
[1] Préndelo[2] LED encendido
[3] ¡Bip!
Conéctalo al puerto USB de tu computador
4
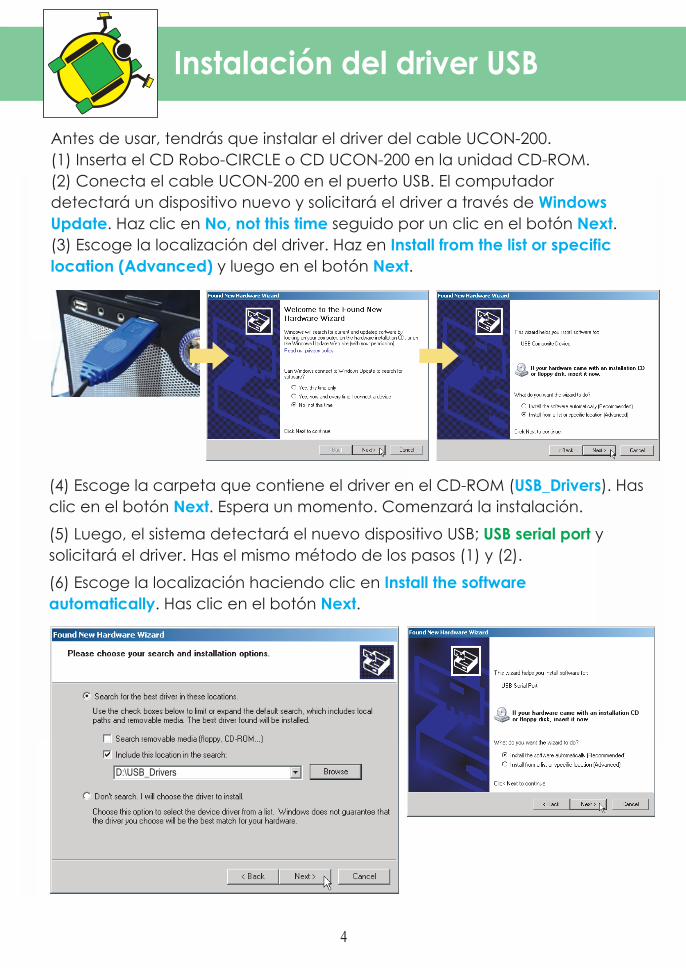
Instalación del driver USB
Antes de usar, tendrás que instalar el driver del cable UCON-200.(1) Inserta el CD Robo-CIRCLE o CD UCON-200 en la unidad CD-ROM.(2) Conecta el cable UCON-200 en el puerto USB. El computadordetectará un dispositivo nuevo y solicitará el driver a través de Windows Update. Haz clic en No, not this time seguido por un clic en el botón Next.(3) Escoge la localización del driver. Haz en Install from the list or specific location (Advanced) y luego en el botón Next.
(4) Escoge la carpeta que contiene el driver en el CD-ROM (USB_Drivers). Has clic en el botón Next. Espera un momento. Comenzará la instalación. (5) Luego, el sistema detectará el nuevo dispositivo USB; USB serial port ysolicitará el driver. Has el mismo método de los pasos (1) y (2).(6) Escoge la localización haciendo clic en Install the software automatically. Has clic en el botón Next.
5
How does the i-BOX interface with my computer
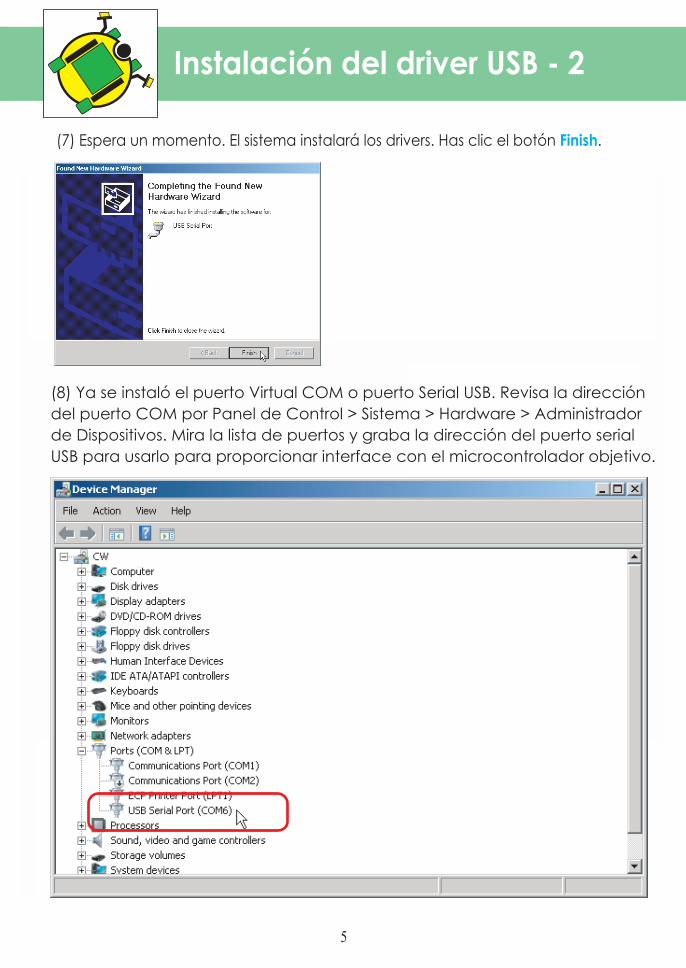
Instalación del driver USB - 2
(7) Espera un momento. El sistema instalará los drivers. Has clic el botón Finish.
(8) Ya se instaló el puerto Virtual COM o puerto Serial USB. Revisa la dirección del puerto COM por Panel de Control > Sistema > Hardware > Administrador de Dispositivos. Mira la lista de puertos y graba la dirección del puerto serial USB para usarlo para proporcionar interface con el microcontrolador objetivo.
6
Instalación del Software
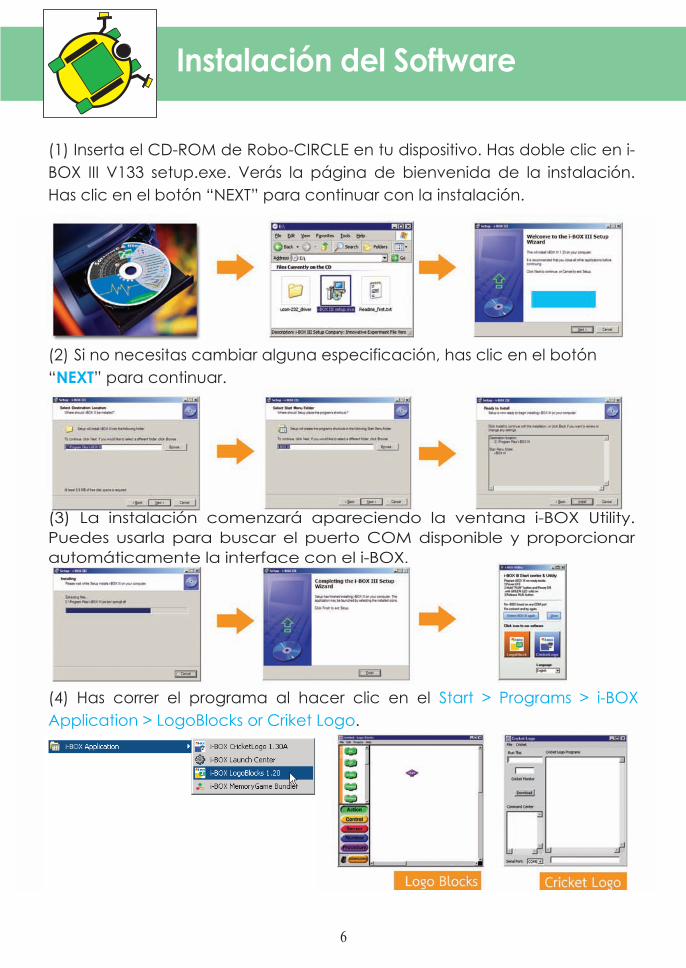
(1) Inserta el CD-ROM de Robo-CIRCLE en tu dispositivo. Has doble clic en i-BOX III V133 setup.exe. Verás la página de bienvenida de la instalación. Has clic en el botón “NEXT” para continuar con la instalación.
(2) Si no necesitas cambiar alguna especificación, has clic en el botón “NEXT” para continuar.
(3) La instalación comenzará apareciendo la ventana i-BOX Utility.Puedes usarla para buscar el puerto COM disponible y proporcionar automáticamente la interface con el i-BOX.
(4) Has correr el programa al hacer clic en el Start > Programs > i-BOX Application > LogoBlocks or Criket Logo.
Cómo escoger la interface de puerto serial
Busca y escoge a través del software i-BOX Launch Center software
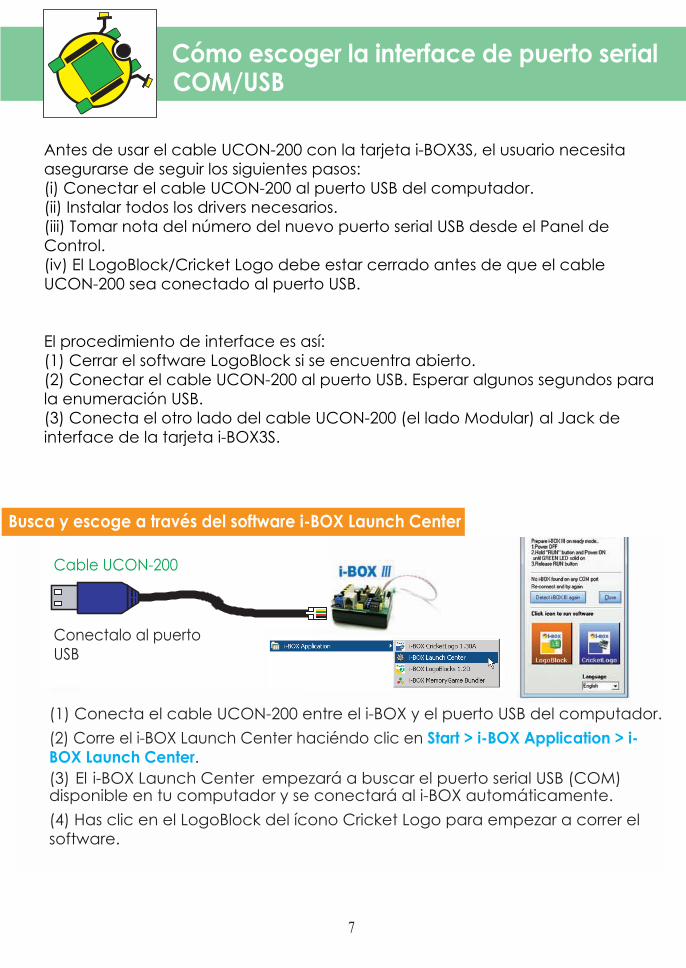
(1) Conecta el cable UCON-200 entre el i-BOX y el puerto USB del computador.(2) Corre el i-BOX Launch Center haciéndo clic en Start > i-BOX Application > i-BOX Launch Center. (3) El i-BOX Launch Center empezará a buscar el puerto serial USB (COM) disponible en tu computador y se conectará al i-BOX automáticamente.(4) Has clic en el LogoBlock del ícono Cricket Logo para empezar a correr el software.
Notebook computer
Desktop computer
USB<>COM port
UCON-232S CX-4 cable
CX-4 cable
Cable UCON-200
Conectalo al puerto USB
COM/USB
7
Antes de usar el cable UCON-200 con la tarjeta i-BOX3S, el usuario necesita asegurarse de seguir los siguientes pasos:(i) Conectar el cable UCON-200 al puerto USB del computador.(ii) Instalar todos los drivers necesarios.(iii) Tomar nota del número del nuevo puerto serial USB desde el Panel de Control.(iv) El LogoBlock/Cricket Logo debe estar cerrado antes de que el cable UCON-200 sea conectado al puerto USB.
El procedimiento de interface es así:(1) Cerrar el software LogoBlock si se encuentra abierto.(2) Conectar el cable UCON-200 al puerto USB. Esperar algunos segundos para la enumeración USB.(3) Conecta el otro lado del cable UCON-200 (el lado Modular) al Jack de interface de la tarjeta i-BOX3S.
8
Busca y escoge por ti mismo
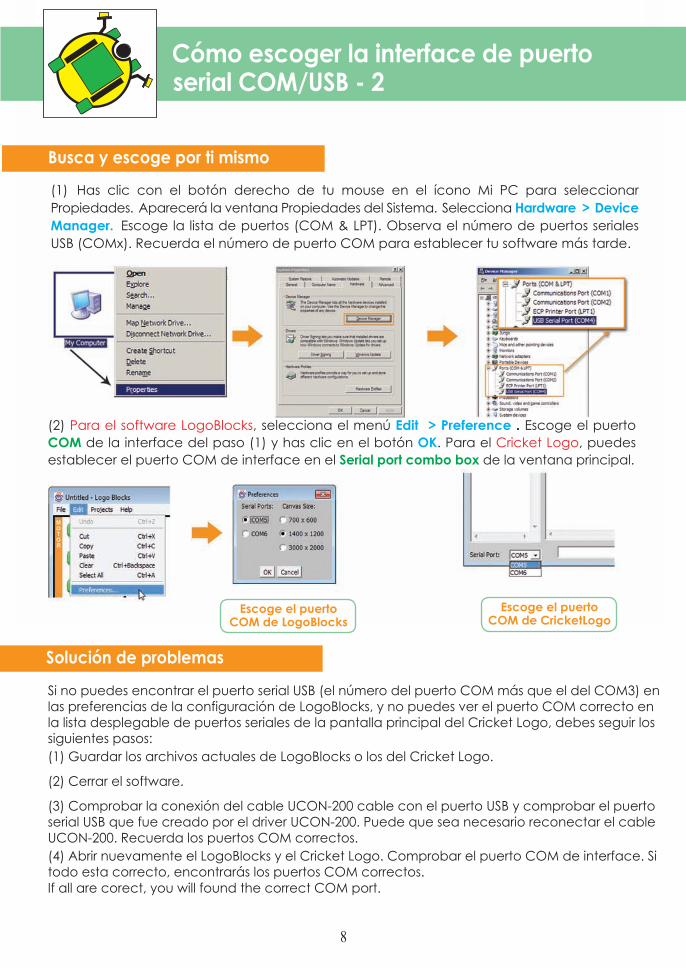
(1) Has clic con el botón derecho de tu mouse en el ícono Mi PC para seleccionar Propiedades. Aparecerá la ventana Propiedades del Sistema. Selecciona Hardware > Device Manager. Escoge la lista de puertos (COM & LPT). Observa el número de puertos seriales USB (COMx). Recuerda el número de puerto COM para establecer tu software más tarde.
(2) Para el software LogoBlocks, selecciona el menú Edit > Preference . Escoge el puerto COM de la interface del paso (1) y has clic en el botón OK. Para el Cricket Logo, puedes establecer el puerto COM de interface en el Serial port combo box de la ventana principal.
Si no puedes encontrar el puerto serial USB (el número del puerto COM más que el del COM3) en las preferencias de la configuración de LogoBlocks, y no puedes ver el puerto COM correcto en la lista desplegable de puertos seriales de la pantalla principal del Cricket Logo, debes seguir los siguientes pasos:(1) Guardar los archivos actuales de LogoBlocks o los del Cricket Logo.
(2) Cerrar el software.
(3) Comprobar la conexión del cable UCON-200 cable con el puerto USB y comprobar el puerto serial USB que fue creado por el driver UCON-200. Puede que sea necesario reconectar el cable UCON-200. Recuerda los puertos COM correctos.(4) Abrir nuevamente el LogoBlocks y el Cricket Logo. Comprobar el puerto COM de interface. Si todo esta correcto, encontrarás los puertos COM correctos. If all are corect, you will found the correct COM port.
Escoge el puerto COM de LogoBlocks
Escoge el puerto COM de CricketLogo
Cómo escoger la interface de puerto serial COM/USB - 2
Solución de problemas
9
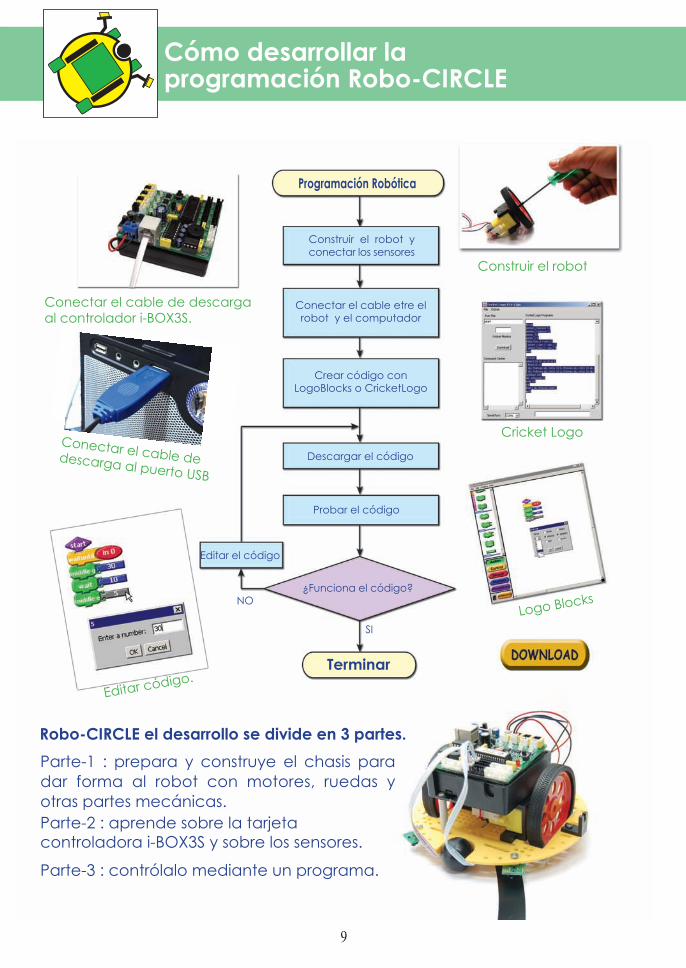
Cómo desarrollar la programación Robo-CIRCLE
Conectar el cable de descarga al controlador i-BOX3S.
Robo-CIRCLE el desarrollo se divide en 3 partes.Parte-1 : prepara y construye el chasis para dar forma al robot con motores, ruedas y otras partes mecánicas.Parte-2 : aprende sobre la tarjeta controladora i-BOX3S y sobre los sensores.
Parte-3 : contrólalo mediante un programa.
Construir el robot
Cricket Logo
Logo Blocks
Editar código.
Conectar el cable de descarga al puerto USB
Programación Robótica
Construir el robot y conectar los sensores
Conectar el cable etre el robot y el computador
Crear código conLogoBlocks o CricketLogo
Descargar el código
Probar el código
¿Funciona el código?
SI
NO
Editar el código
Terminar
10
Resumen de comandos de bloque de LogoBlocks
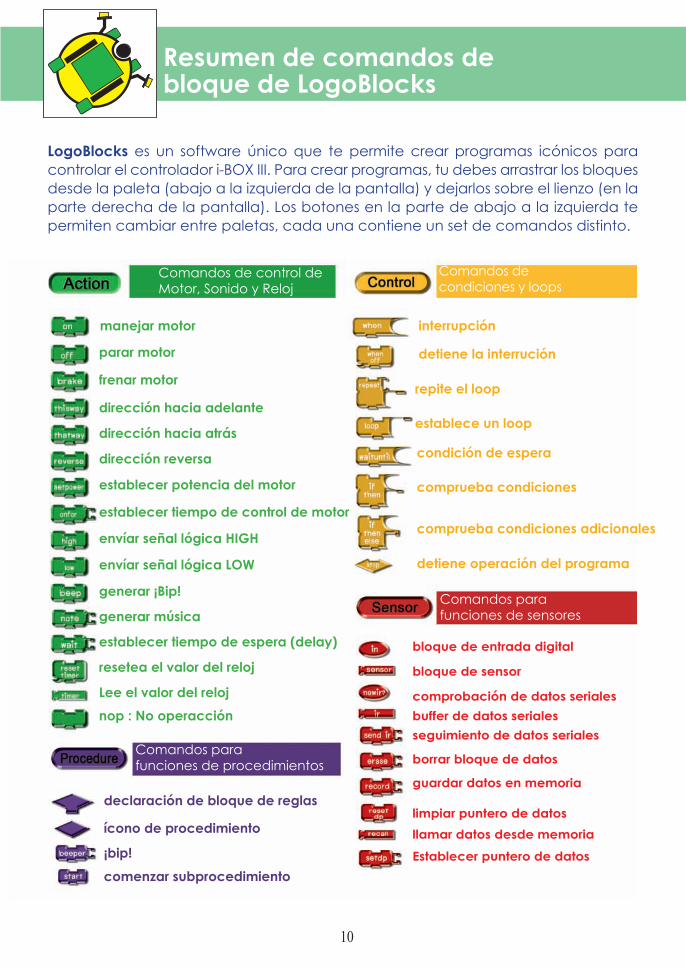
LogoBlocks es un software único que te permite crear programas icónicos para controlar el controlador i-BOX III. Para crear programas, tu debes arrastrar los bloques desde la paleta (abajo a la izquierda de la pantalla) y dejarlos sobre el lienzo (en la parte derecha de la pantalla). Los botones en la parte de abajo a la izquierda te permiten cambiar entre paletas, cada una contiene un set de comandos distinto.
Comandos de control deMotor, Sonido y Reloj
Comandos decondiciones y loops
Comandos parafunciones de procedimientos
Comandos parafunciones de sensores
manejar motor interrupción
detiene la interrución
repite el loop
establece un loop
bloque de entrada digital
bloque de sensor
comprobación de datos serialesbuffer de datos serialesseguimiento de datos seriales
borrar bloque de datos
guardar datos en memoria
limpiar puntero de datosllamar datos desde memoriaEstablecer puntero de datos
parar motor
frenar motor
dirección hacia adelante
dirección hacia atrás
dirección reversa
establecer potencia del motor
establecer tiempo de control de motor
envíar señal lógica HIGH
envíar señal lógica LOW
generar ¡Bip!
generar música
establecer tiempo de espera (delay)
resetea el valor del reloj
Lee el valor del relojnop : No operacción
declaración de bloque de reglas
ícono de procedimiento
¡bip!comenzar subprocedimiento
condición de espera
comprueba condiciones
comprueba condiciones adicionales
detiene operación del programa
11
Resumen de comandos de bloque de LogoBlocks
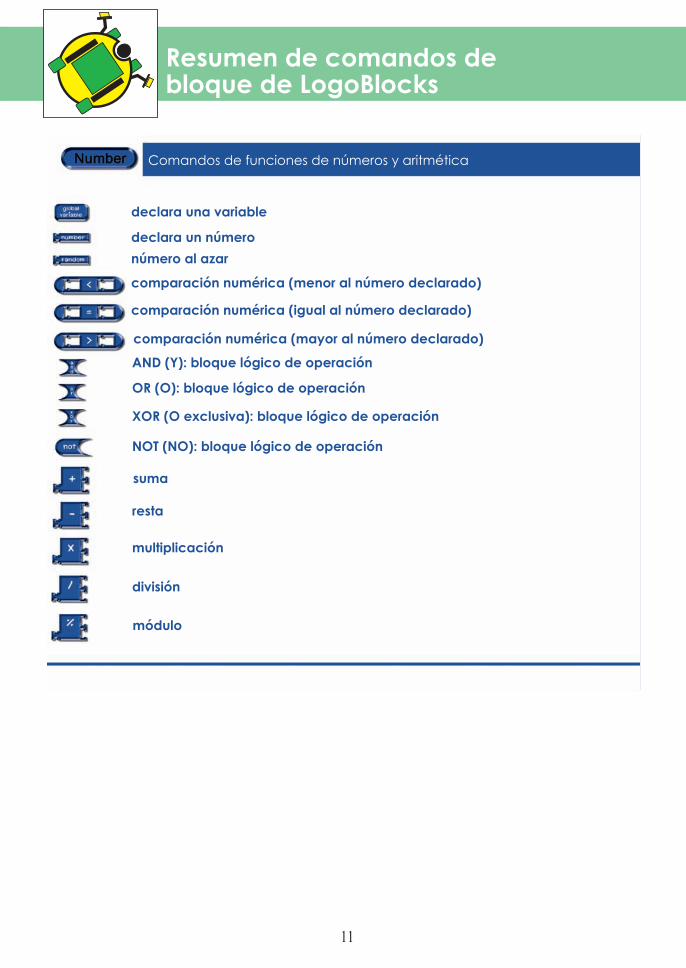
Comandos de funciones de números y aritmética
declara una variable
NOT (NO): bloque lógico de operación
suma
resta
multiplicación
división
módulo
declara un númeronúmero al azar
comparación numérica (menor al número declarado)
comparación numérica (igual al número declarado)
comparación numérica (mayor al número declarado)
AND (Y): bloque lógico de operación
OR (O): bloque lógico de operación
XOR (O exclusiva): bloque lógico de operación
12
ZX-LED : Introducción a la salida LED de la tarjeta
¿Cómo funciona?
Interface con el i-BOX III
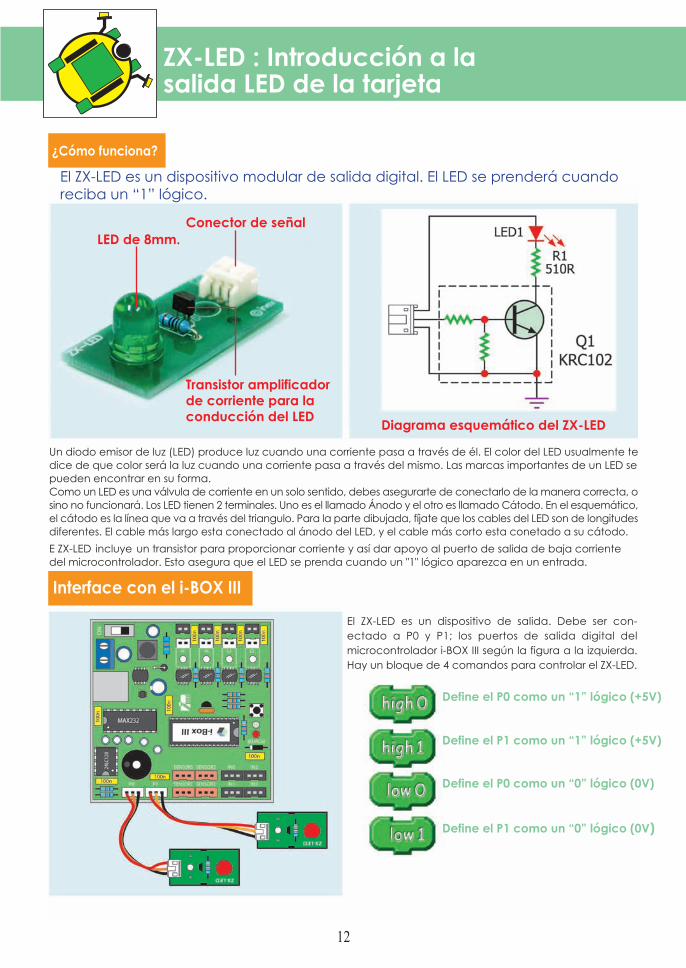
El ZX-LED es un dispositivo modular de salida digital. El LED se prenderá cuando reciba un “1” lógico.
Un diodo emisor de luz (LED) produce luz cuando una corriente pasa a través de él. El color del LED usualmente te dice de que color será la luz cuando una corriente pasa a través del mismo. Las marcas importantes de un LED se pueden encontrar en su forma.Como un LED es una válvula de corriente en un solo sentido, debes asegurarte de conectarlo de la manera correcta, o sino no funcionará. Los LED tienen 2 terminales. Uno es el llamado Ánodo y el otro es llamado Cátodo. En el esquemático, el cátodo es la línea que va a través del triangulo. Para la parte dibujada, fíjate que los cables del LED son de longitudes diferentes. El cable más largo esta conectado al ánodo del LED, y el cable más corto esta conetado a su cátodo.E ZX-LED incluye un transistor para proporcionar corriente y así dar apoyo al puerto de salida de baja corriente del microcontrolador. Esto asegura que el LED se prenda cuando un "1" lógico aparezca en un entrada.
El ZX-LED es un dispositivo de salida. Debe ser con-ectado a P0 y P1; los puertos de salida digital del microcontrolador i-BOX III según la figura a la izquierda. Hay un bloque de 4 comandos para controlar el ZX-LED.
Define el P0 como un “1” lógico (+5V)
Conector de señal
Transistor amplificador de corriente para la conducción del LED Diagrama esquemático del ZX-LED
LED de 8mm.
Define el P1 como un “1” lógico (+5V)
Define el P0 como un “0” lógico (0V)
Define el P1 como un “0” lógico (0V)
13
Diviértete con el LED
Diagrama de conexión
Procedimiento para el desarrollo del programa con Cricket Logo
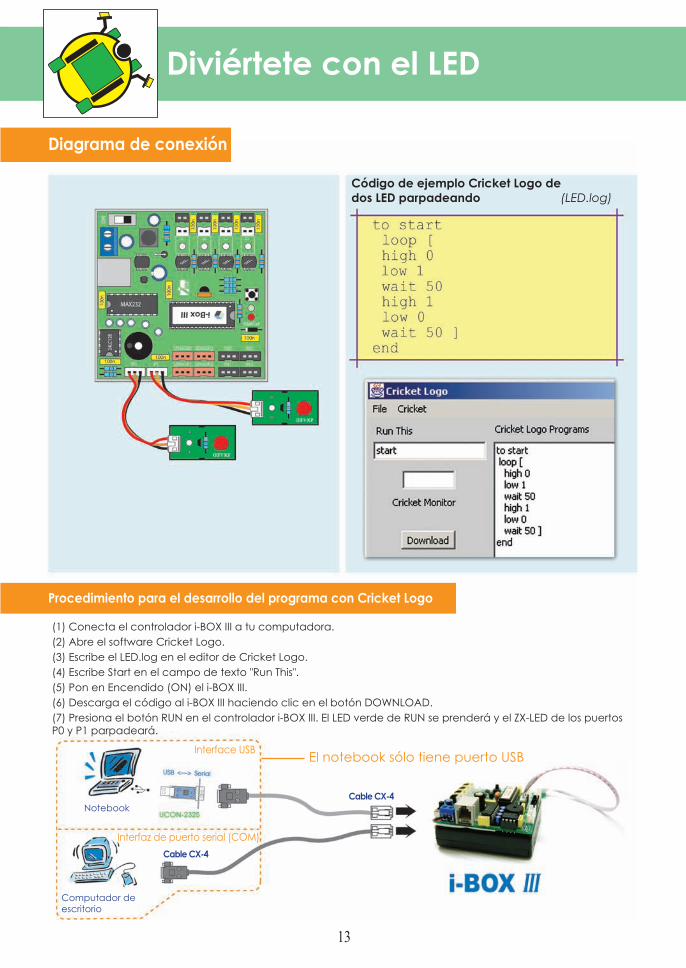
Código de ejemplo Cricket Logo dedos LED parpadeando (LED.log)
(1) Conecta el controlador i-BOX III a tu computadora.(2) Abre el software Cricket Logo.(3) Escribe el LED.log en el editor de Cricket Logo.(4) Escribe Start en el campo de texto "Run This".(5) Pon en Encendido (ON) el i-BOX III.(6) Descarga el código al i-BOX III haciendo clic en el botón DOWNLOAD.(7) Presiona el botón RUN en el controlador i-BOX III. El LED verde de RUN se prenderá y el ZX-LED de los puertos P0 y P1 parpadeará.
El notebook sólo tiene puerto USB
Notebook
Computador deescritorio
Cable CX-4
Cable CX-4
Interface USB
Interfaz de puerto serial (COM)
14
Diviértete con el LED
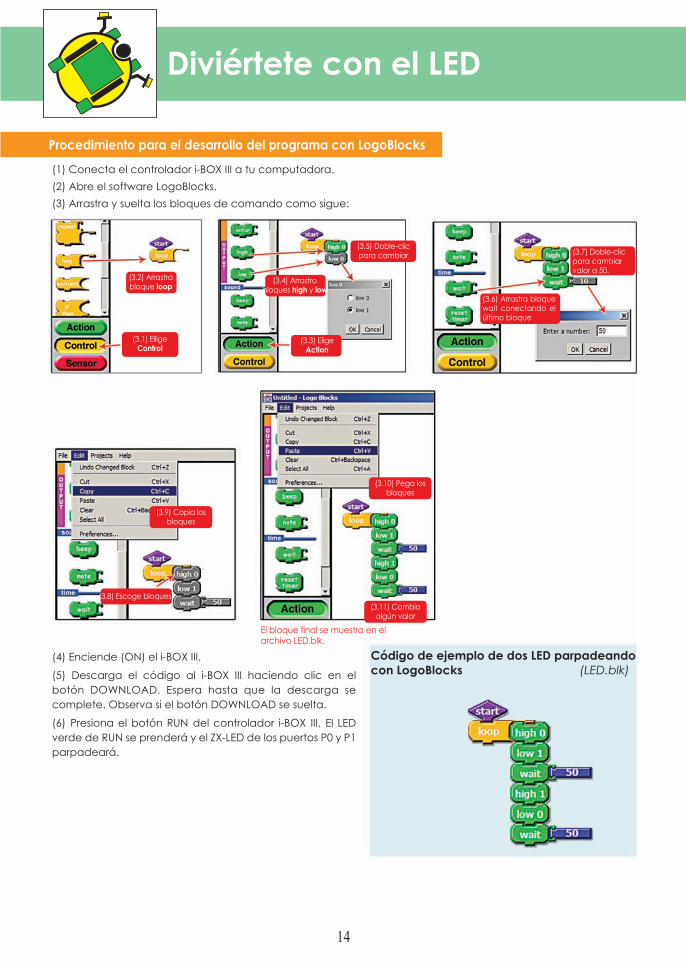
Procedimiento para el desarrollo del programa con LogoBlocks(1) Conecta el controlador i-BOX III a tu computadora.(2) Abre el software LogoBlocks.(3) Arrastra y suelta los bloques de comando como sigue:
(3.1) Ellige Control
(3.8) Escoge bloques
(3.9) Copia los bloques
(3.10) Pega los bloques
(3.11) Cambia algún valor
El bloque final se muestra en el archivo LED.blk.
(3.2) Arrastra bloque loop
(3.3) Elige Action
(3.6) Arrastra bloque wait conectando el último bloque
(3.7) Doble-clic para cambiar valor a 50.
(3.4) Arrastra bloques high y low
(3.5) Doble-clic para cambiar
(4) Enciende (ON) el i-BOX III.
(5) Descarga el código al i-BOX III haciendo clic en el botón DOWNLOAD. Espera hasta que la descarga se complete. Observa si el botón DOWNLOAD se suelta.
(6) Presiona el botón RUN del controlador i-BOX III. El LED verde de RUN se prenderá y el ZX-LED de los puertos P0 y P1 parpadeará.
Código de ejemplo de dos LED parpadeandocon LogoBlocks (LED.blk)
15
Introducción a los sensores Switch/Touch
Operación básica de un Switch
Operación del Switch
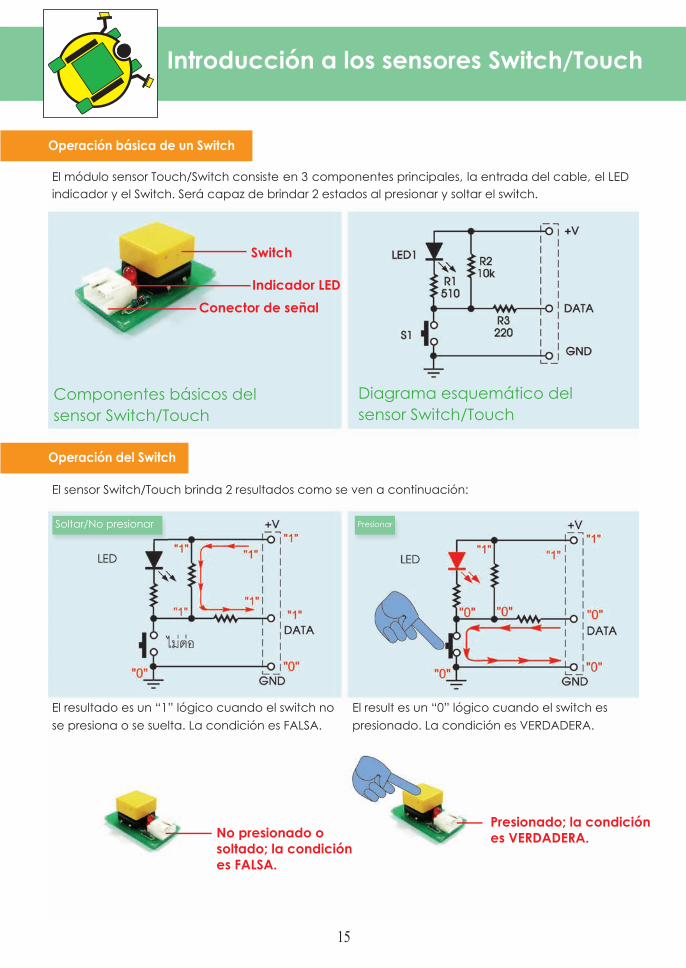
El módulo sensor Touch/Switch consiste en 3 componentes principales, la entrada del cable, el LED indicador y el Switch. Será capaz de brindar 2 estados al presionar y soltar el switch.
El sensor Switch/Touch brinda 2 resultados como se ven a continuación:
El resultado es un “1” lógico cuando el switch no se presiona o se suelta. La condición es FALSA.
El result es un “0” lógico cuando el switch es presionado. La condición es VERDADERA.
Switch
Indicador LEDConector de señal
No presionado osoltado; la condiciónes FALSA.
Presionado; la condiciónes VERDADERA.
Componentes básicos del sensor Switch/Touch
Diagrama esquemático del sensor Switch/Touch
Soltar/No presionar Presionar
16
Juega con el sensor Switch
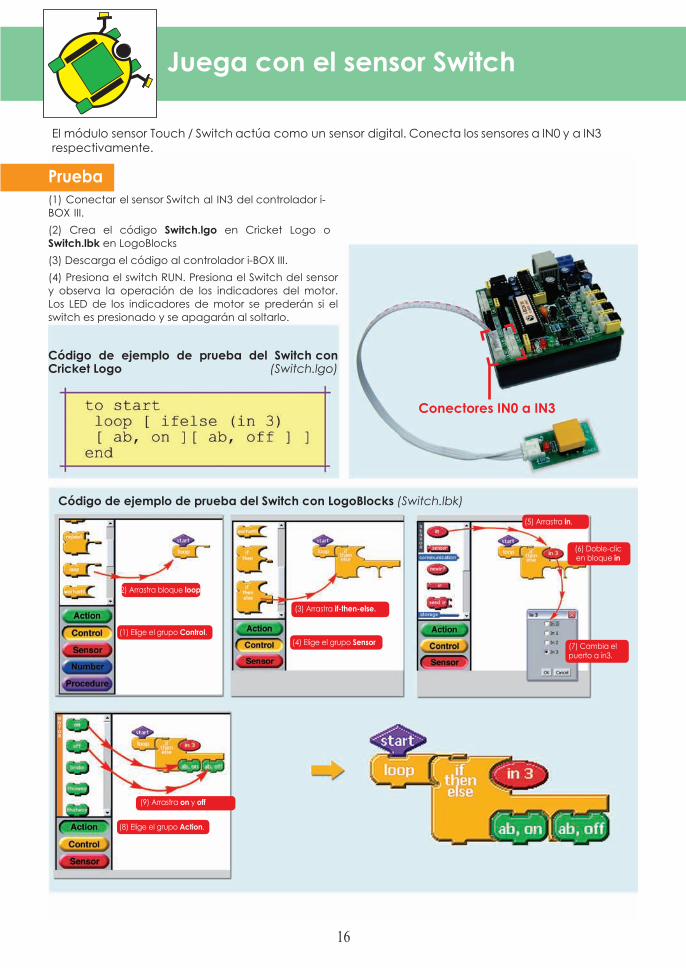
El módulo sensor Touch / Switch actúa como un sensor digital. Conecta los sensores a IN0 y a IN3respectivamente.
Prueba(1) Conectar el sensor Switch al IN3 del controlador i-BOX III.(2) Crea el código Switch.lgo en Cricket Logo o Switch.lbk en LogoBlocks(3) Descarga el código al controlador i-BOX III.(4) Presiona el switch RUN. Presiona el Switch del sensor y observa la operación de los indicadores del motor. Los LED de los indicadores de motor se prederán si el switch es presionado y se apagarán al soltarlo.
Código de ejemplo de prueba del Switch con Cricket Logo (Switch.lgo)
Código de ejemplo de prueba del Switch con LogoBlocks (Switch.lbk)
Conectores IN0 a IN3
(1) Elige el grupo Control.
(2) Arrastra bloque loop
(3) Arrastra if-then-else.
(4) Elige el grupo Sensor
(8) Elige el grupo Action.
(9) Arrastra on y off
(5) Arrastra in.
(6) Doble-clic en bloque in
(7) Cambia el puerto a in3.
17
Actividad de control del LED Switch
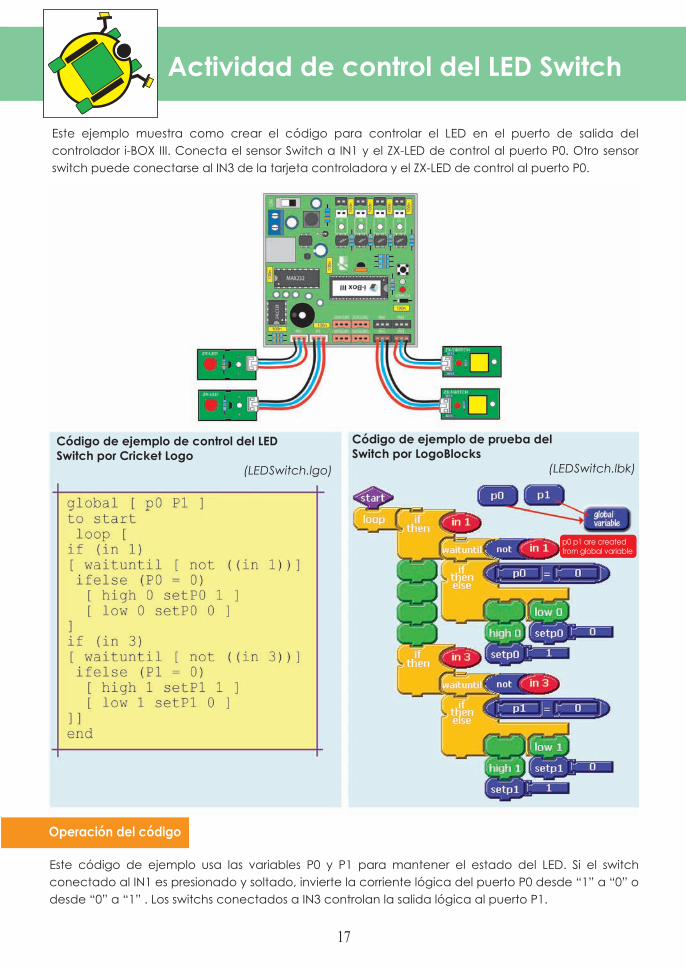
Este ejemplo muestra como crear el código para controlar el LED en el puerto de salida del controlador i-BOX III. Conecta el sensor Switch a IN1 y el ZX-LED de control al puerto P0. Otro sensor switch puede conectarse al IN3 de la tarjeta controladora y el ZX-LED de control al puerto P0.
Código de ejemplo de control del LEDSwitch por Cricket Logo
(LEDSwitch.lgo)
Código de ejemplo de prueba delSwitch por LogoBlocks
(LEDSwitch.lbk)
Operación del código
p0 p1 are created from global variable
Este código de ejemplo usa las variables P0 y P1 para mantener el estado del LED. Si el switch conectado al IN1 es presionado y soltado, invierte la corriente lógica del puerto P0 desde “1” a “0” odesde “0” a “1” . Los switchs conectados a IN3 controlan la salida lógica al puerto P1.

18
Construyendo el Robo-CIRCLE
Lista de partes
Controlador i-BOX3.0
2 cajas de engranajes con motores DC 120:1 y montura
Chasis circular
4 tornillos de cabeza plana de 3x8mm.
2 tornillos auto-roscantes de 2mm.
Caja contenedora Ruedas y neumáticos 2 espaciadores metálicosde 33mm.
Construcción(1) Conecta las 2 cajas de engranaje de los motores DC con la ca ja contenedora mediante los torni l los de cabeza plana de 3x8mm. como lo muestra la imagen siguiente.
Tornillos de cabeza plana de 3x8mm.
Tornillos de cabeza plana de 3x8mm.
19
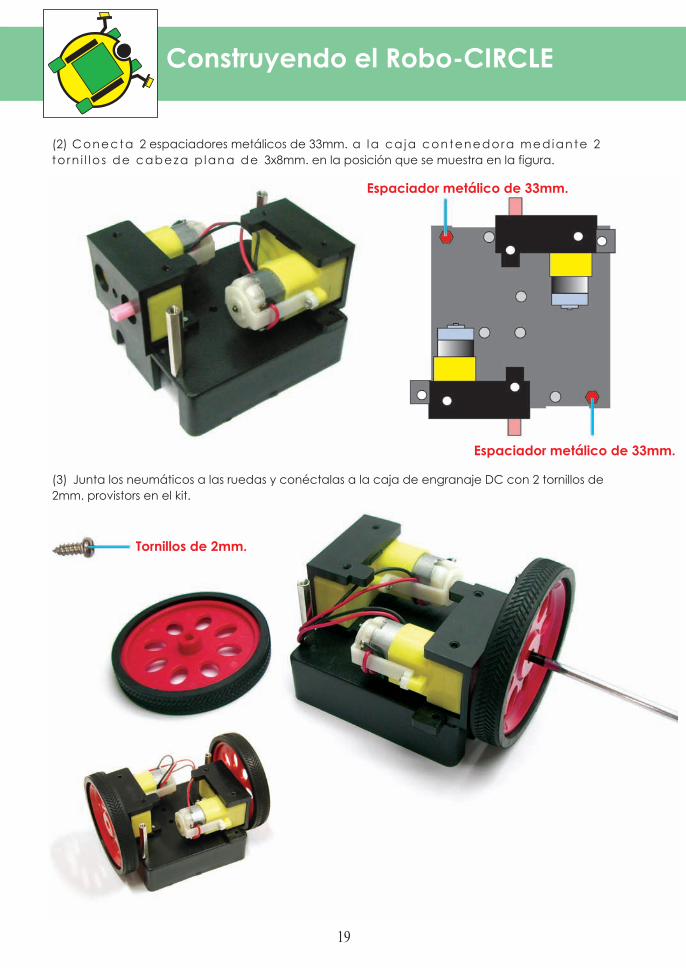
(2) Conecta 2 espaciadores metálicos de 33mm. a la ca ja contenedora mediante 2 to rn i l lo s de cabeza p lana de 3x8mm. en la posición que se muestra en la figura.
(3) Junta los neumáticos a las ruedas y conéctalas a la caja de engranaje DC con 2 tornillos de 2mm. provistors en el kit.
Construyendo el Robo-CIRCLE
Espaciador metálico de 33mm.
Espaciador metálico de 33mm.
Tornillos de 2mm.
20
Construyendo el Robo-CIRCLE
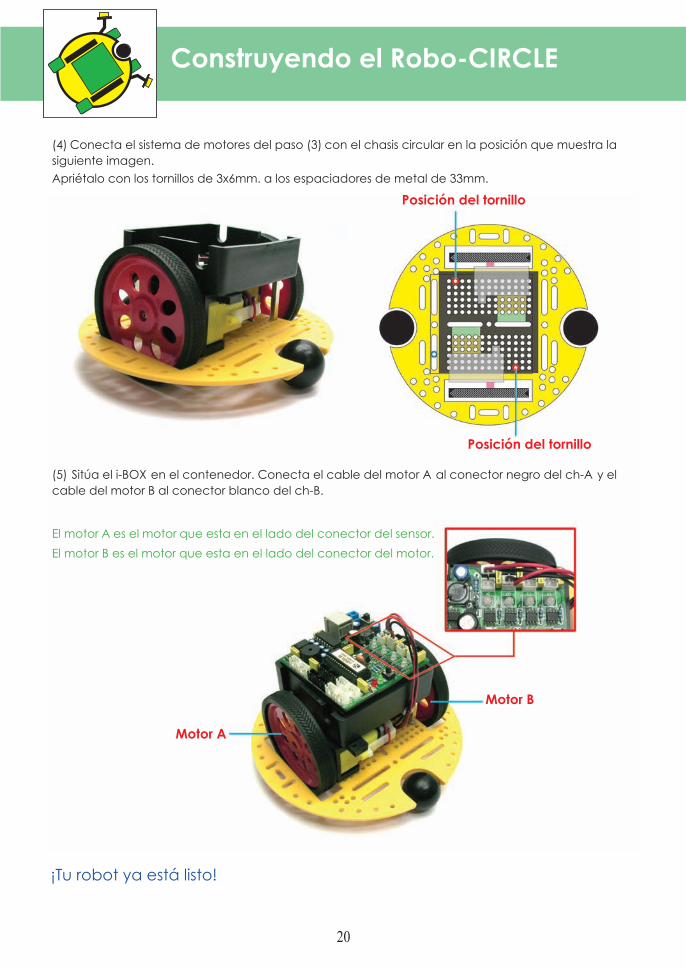
(4) Conecta el sistema de motores del paso (3) con el chasis circular en la posición que muestra la siguiente imagen.Apriétalo con los tornillos de 3x6mm. a los espaciadores de metal de 33mm.
(5) Sitúa el i-BOX en el contenedor. Conecta el cable del motor A al conector negro del ch-A y el cable del motor B al conector blanco del ch-B.
¡Tu robot ya está listo!
El motor A es el motor que esta en el lado del conector del sensor.El motor B es el motor que esta en el lado del conector del motor.
Posición del tornillo
Posición del tornillo
Motor A
Motor B
21
Operación del motor con caja deengranajes DC
El Robo-CIRCLE es impulsado por 2 motores DC con caja de engranaje. Este tópico explica la operación del motor DC y su caja de engranajes. Los engranajes son usados en toneladas de dispositivos mecánicos. Ellos hacen muchos trabajos importantes, pero lo más importante es que proveen una reducción de engranajes en equipamiento motorizado. Esto es clave puesto que muy menudo un motor pequeño girando a gran velocidad puede proveer suficiente potencia a un dispositivo pequeño, pero no suficiente torque. Por ejemplo, un atornillador eléctrico tiene una reducción de engranajes muy grande, por lo que necesita mucho torque para hacer girar los tornillos, pero el motor solo produce una pequeña cantidad de torque a grandes velocidades. Con una reducción de engranajes, la velocidad de salida puede ser reducida mientras que el torque aumenta.
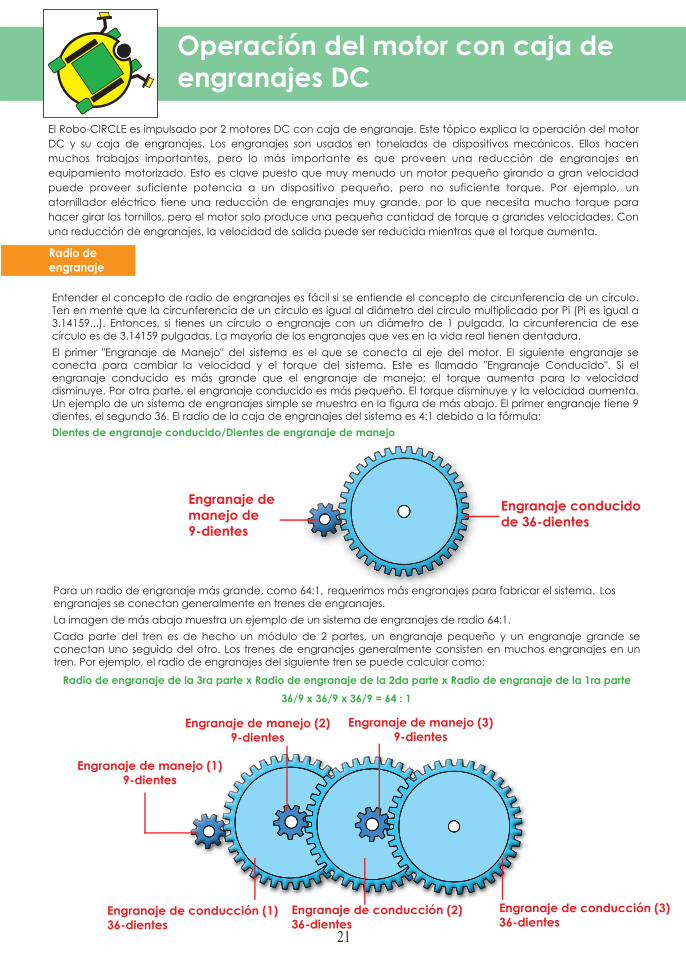
Entender el concepto de radio de engranajes es fácil si se entiende el concepto de circunferencia de un círculo.Ten en mente que la circunferencia de un círculo es igual al diámetro del círculo multiplicado por Pi (Pi es igual a3.14159...). Entonces, si tienes un círculo o engranaje con un diámetro de 1 pulgada, la circunferencia de ese círculo es de 3.14159 pulgadas. La mayoría de los engranajes que ves en la vida real tienen dentadura.El primer "Engranaje de Manejo" del sistema es el que se conecta al eje del motor. El siguiente engranaje se conecta para cambiar la velocidad y el torque del sistema. Este es llamado "Engranaje Conducido". Si el engranaje conducido es más grande que el engranaje de manejo; el torque aumenta para la velocidad disminuye. Por otra parte, el engranaje conducido es más pequeño. El torque disminuye y la velocidad aumenta.Un ejemplo de un sistema de engranajes simple se muestra en la figura de más abajo. El primer engranaje tiene 9dientes, el segundo 36. El radio de la caja de engranajes del sistema es 4:1 debido a la fórmula:Dientes de engranaje conducido/Dientes de engranaje de manejo
Para un radio de engranaje más grande, como 64:1, requerimos más engranajes para fabricar el sistema. Los engranajes se conectan generalmente en trenes de engranajes. La imagen de más abajo muestra un ejemplo de un sistema de engranajes de radio 64:1. Cada parte del tren es de hecho un módulo de 2 partes, un engranaje pequeño y un engranaje grande se conectan uno seguido del otro. Los trenes de engranajes generalmente consisten en muchos engranajes en un tren. Por ejemplo, el radio de engranajes del siguiente tren se puede calcular como:
Radio de engranaje de la 3ra parte x Radio de engranaje de la 2da parte x Radio de engranaje de la 1ra parte36/9 x 36/9 x 36/9 = 64 : 1
Radio deengranaje
Engranaje demanejo de9-dientes
Engranaje de manejo (1)9-dientes
Engranaje de conducción (1)36-dientes
Engranaje de manejo (2)9-dientes
Engranaje de manejo (3)9-dientes
Engranaje de conducción (2)36-dientes
Engranaje conducido de 36-dientes
Engranaje de conducción (3)36-dientes
22
Operación del motor con caja deengranajes DC
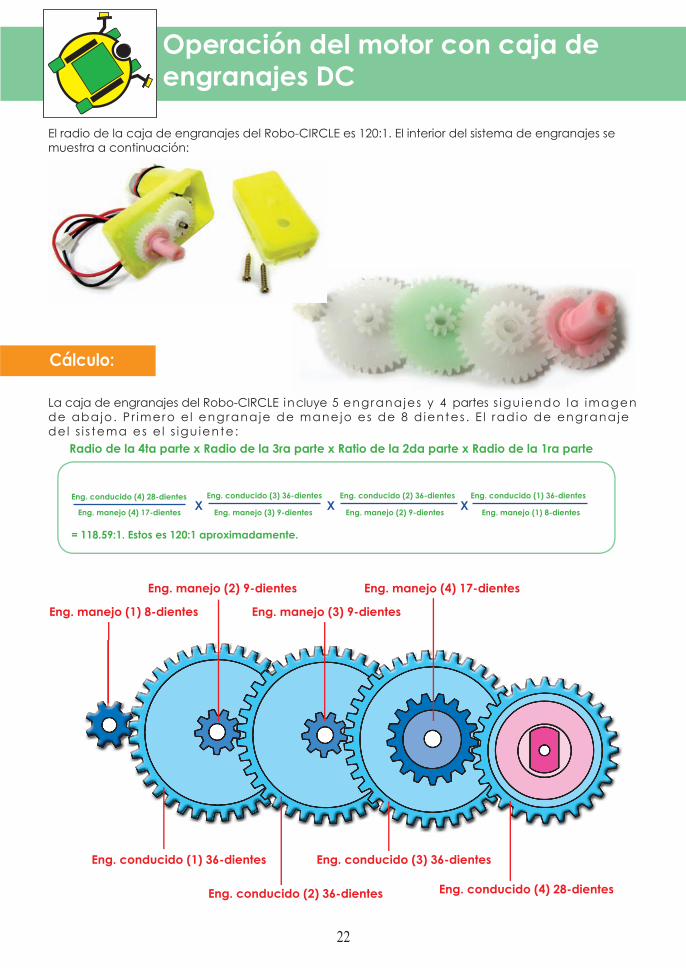
El radio de la caja de engranajes del Robo-CIRCLE es 120:1. El interior del sistema de engranajes semuestra a continuación:
La caja de engranajes del Robo-CIRCLE i ncluye 5 engrana jes y 4 partes s igu iendo la imagen de aba jo. P r imero e l engrana je de mane jo es de 8 d ientes . E l rad io de engrana je de l s i s tema es e l s igu iente:
Radio de la 4ta parte x Radio de la 3ra parte x Ratio de la 2da parte x Radio de la 1ra parte
Eng. conducido (4) 28-dientesX X X Eng. conducido (3) 36-dientes Eng. conducido (2) 36-dientes Eng. conducido (1) 36-dientes
= 118.59:1. Estos es 120:1 aproximadamente.
Eng. manejo (4) 17-dientes Eng. manejo (3) 9-dientes Eng. manejo (2) 9-dientes Eng. manejo (1) 8-dientes
Cálculo:
Eng. manejo (1) 8-dientes
Eng. conducido (1) 36-dientes Eng. conducido (3) 36-dientes
Eng. conducido (2) 36-dientes Eng. conducido (4) 28-dientes
Eng. manejo (3) 9-dientes
Eng. manejo (2) 9-dientes Eng. manejo (4) 17-dientes
23
Movimiento del Robo-CIRCLE (1)
Movimiento hacia adelante y hacia atrás
Pasos para el desarrollo del programacon Cricket Logo
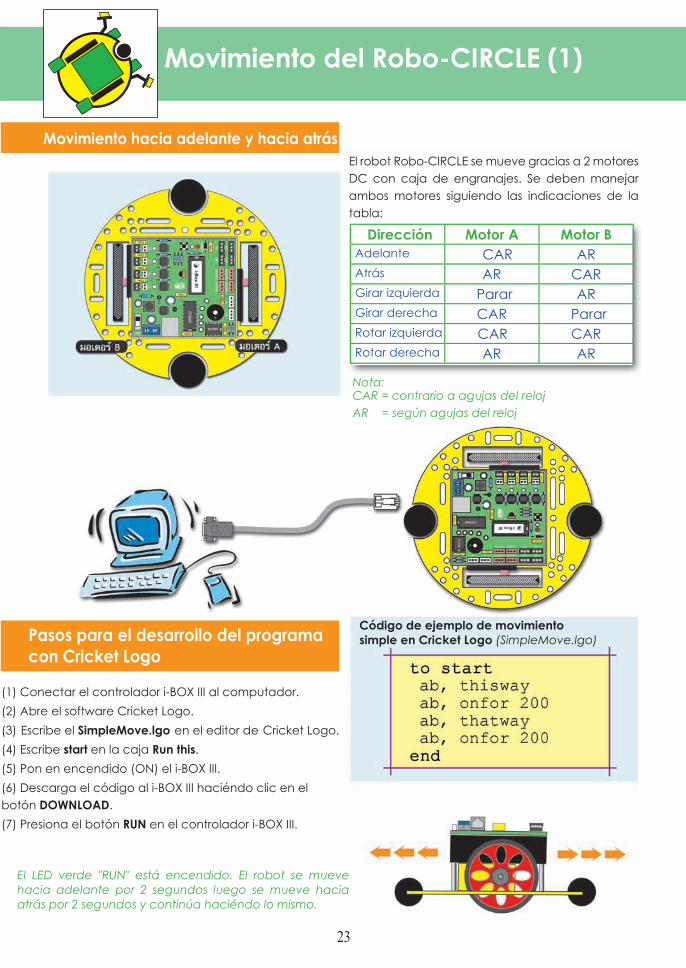
El robot Robo-CIRCLE se mueve gracias a 2 motores DC con caja de engranajes. Se deben manejar ambos motores siguiendo las indicaciones de la tabla:
(1) Conectar el controlador i-BOX III al computador.(2) Abre el software Cricket Logo.(3) Escribe el SimpleMove.lgo en el editor de Cricket Logo.(4) Escribe start en la caja Run this.(5) Pon en encendido (ON) el i-BOX III.(6) Descarga el código al i-BOX III haciéndo clic en el botón DOWNLOAD.(7) Presiona el botón RUN en el controlador i-BOX III.
Nota:CAR = contrario a agujas del relojAR = según agujas del reloj
El LED verde "RUN" está encendido. El robot se mueve hacia adelante por 2 segundos luego se mueve hacia atrás por 2 segundos y continúa haciéndo lo mismo.
Dirección Motor A Motor BAdelante CAR ARAtrás AR CARGirar izquierda Parar ARGirar derecha CAR PararRotar izquierda CAR CARRotar derecha AR AR
Código de ejemplo de movimientosimple en Cricket Logo (SimpleMove.lgo)
24
Movimiento del Robo-CIRCLE (2)
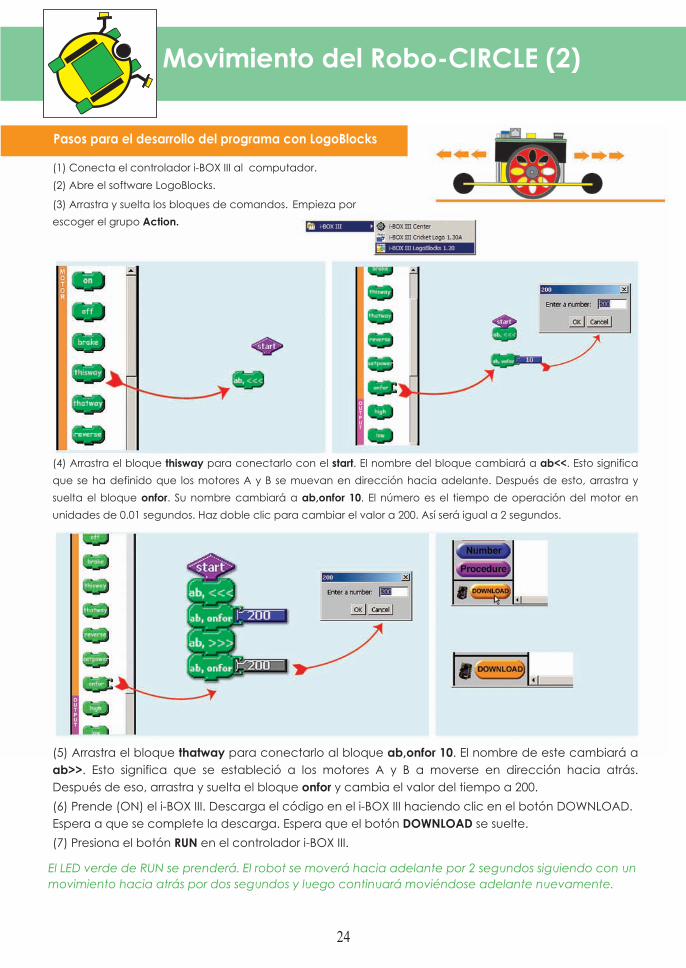
Pasos para el desarrollo del programa con LogoBlocks
(1) Conecta el controlador i-BOX III al computador.(2) Abre el software LogoBlocks.
(3) Arrastra y suelta los bloques de comandos. Empieza por escoger el grupo Action.
(4) Arrastra el bloque thisway para conectarlo con el start. El nombre del bloque cambiará a ab<<. Esto significa que se ha definido que los motores A y B se muevan en dirección hacia adelante. Después de esto, arrastra y suelta el bloque onfor. Su nombre cambiará a ab,onfor 10. El número es el tiempo de operación del motor en unidades de 0.01 segundos. Haz doble clic para cambiar el valor a 200. Así será igual a 2 segundos.
(5) Arrastra el bloque thatway para conectarlo al bloque ab,onfor 10. El nombre de este cambiará a ab>>. Esto significa que se estableció a los motores A y B a moverse en dirección hacia atrás. Después de eso, arrastra y suelta el bloque onfor y cambia el valor del tiempo a 200. (6) Prende (ON) el i-BOX III. Descarga el código en el i-BOX III haciendo clic en el botón DOWNLOAD. Espera a que se complete la descarga. Espera que el botón DOWNLOAD se suelte.(7) Presiona el botón RUN en el controlador i-BOX III.
El LED verde de RUN se prenderá. El robot se moverá hacia adelante por 2 segundos siguiendo con un movimiento hacia atrás por dos segundos y luego continuará moviéndose adelante nuevamente.
25
Comportamiento de la velocidad delRobo-CIRCLE (1)
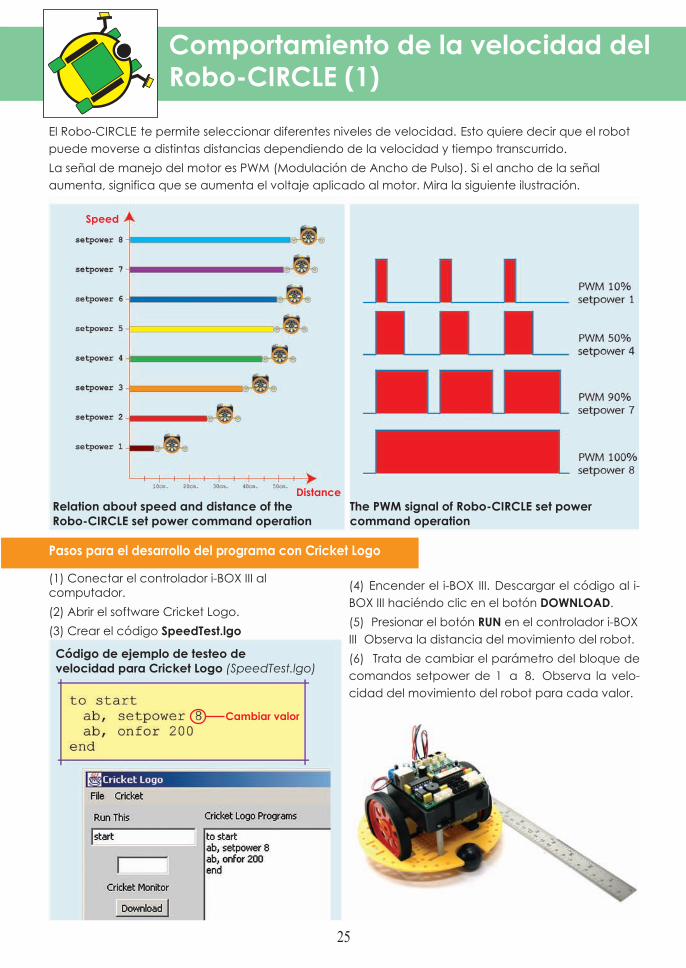
El Robo-CIRCLE te permite seleccionar diferentes niveles de velocidad. Esto quiere decir que el robot puede moverse a distintas distancias dependiendo de la velocidad y tiempo transcurrido.La señal de manejo del motor es PWM (Modulación de Ancho de Pulso). Si el ancho de la señal aumenta, significa que se aumenta el voltaje aplicado al motor. Mira la siguiente ilustración.
(1) Conectar el controlador i-BOX III al computador.(2) Abrir el software Cricket Logo.(3) Crear el código SpeedTest.lgo
(4) Encender el i-BOX III. Descargar el código al i-BOX III haciéndo clic en el botón DOWNLOAD.(5) Presionar el botón RUN en el controlador i-BOX III Observa la distancia del movimiento del robot.(6) Trata de cambiar el parámetro del bloque de comandos setpower de 1 a 8. Observa la velo-cidad del movimiento del robot para cada valor.
Speed
Distance
Cambiar valor
Relation about speed and distance of the Robo-CIRCLE set power command operation
Código de ejemplo de testeo develocidad para Cricket Logo (SpeedTest.lgo)
The PWM signal of Robo-CIRCLE set power command operation
Pasos para el desarrollo del programa con Cricket Logo
26
Comportamiento de la velocidad delRobo-CIRCLE (2)
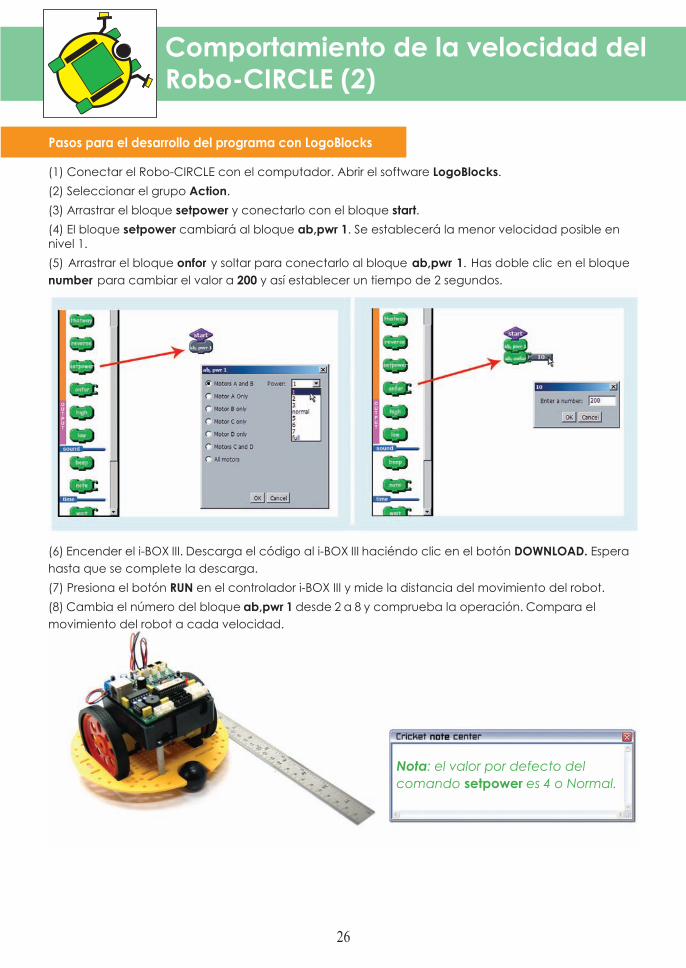
(1) Conectar el Robo-CIRCLE con el computador. Abrir el software LogoBlocks.(2) Seleccionar el grupo Action. (3) Arrastrar el bloque setpower y conectarlo con el bloque start.(4) El bloque setpower cambiará al bloque ab,pwr 1. Se establecerá la menor velocidad posible en nivel 1. (5) Arrastrar el bloque onfor y soltar para conectarlo al bloque ab,pwr 1. Has doble clic en el bloque number para cambiar el valor a 200 y así establecer un tiempo de 2 segundos.
Pasos para el desarrollo del programa con LogoBlocks
(6) Encender el i-BOX III. Descarga el código al i-BOX III haciéndo clic en el botón DOWNLOAD. Espera hasta que se complete la descarga.(7) Presiona el botón RUN en el controlador i-BOX III y mide la distancia del movimiento del robot.(8) Cambia el número del bloque ab,pwr 1 desde 2 a 8 y comprueba la operación. Compara el movimiento del robot a cada velocidad.
Nota: el valor por defecto delcomando setpower es 4 o Normal.
27
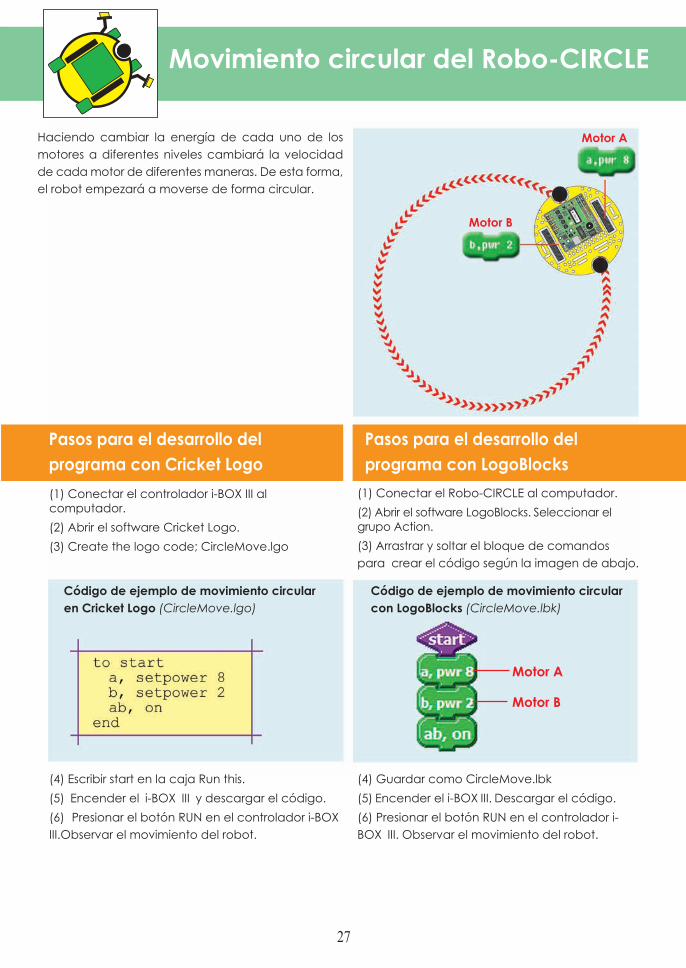
Haciendo cambiar la energía de cada uno de los motores a diferentes niveles cambiará la velocidad de cada motor de diferentes maneras. De esta forma, el robot empezará a moverse de forma circular.
(1) Conectar el controlador i-BOX III al computador.(2) Abrir el software Cricket Logo.(3) Create the logo code; CircleMove.lgo
(1) Conectar el Robo-CIRCLE al computador.(2) Abrir el software LogoBlocks. Seleccionar el grupo Action.(3) Arrastrar y soltar el bloque de comandos para crear el código según la imagen de abajo.
(4) Guardar como CircleMove.lbk (5) Encender el i-BOX III. Descargar el código.(6) Presionar el botón RUN en el controlador i-BOX III. Observar el movimiento del robot.
(4) Escribir start en la caja Run this.(5) Encender el i-BOX III y descargar el código.(6) Presionar el botón RUN en el controlador i-BOX III. Observar el movimiento del robot.
Movimiento circular del Robo-CIRCLE
Motor A
Motor A
Motor B
Motor B
Pasos para el desarrollo del programa con Cricket Logo
Pasos para el desarrollo del programa con LogoBlocks
Código de ejemplo de movimiento circularen Cricket Logo (CircleMove.lgo)
Código de ejemplo de movimiento circularcon LogoBlocks (CircleMove.lbk)
28
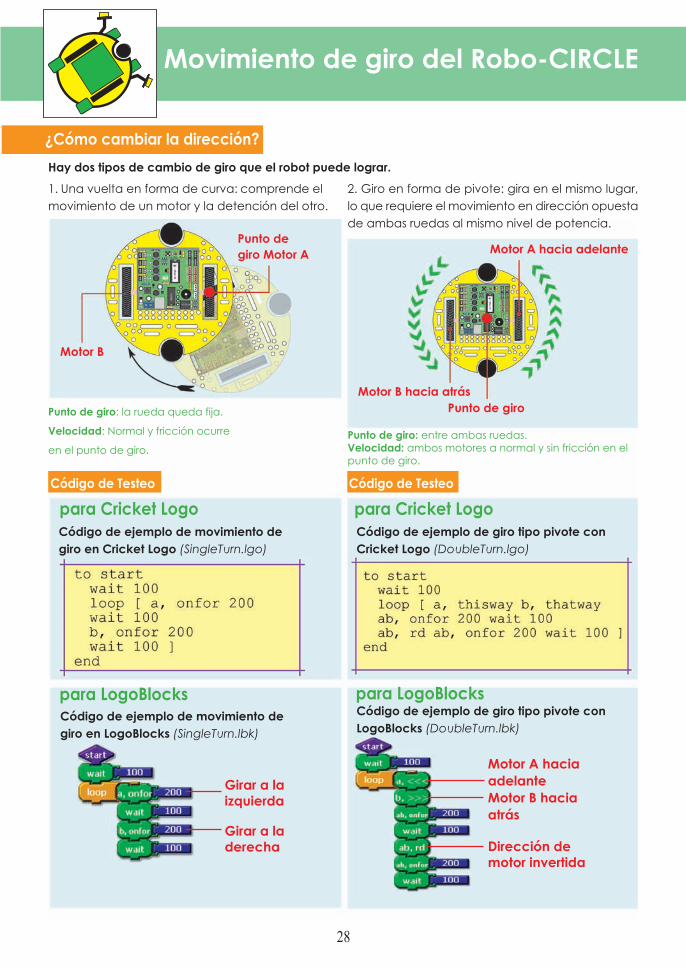
Hay dos tipos de cambio de giro que el robot puede lograr.
Movimiento de giro del Robo-CIRCLE
¿Cómo cambiar la dirección?
1. Una vuelta en forma de curva: comprende el movimiento de un motor y la detención del otro.
2. Giro en forma de pivote: gira en el mismo lugar, lo que requiere el movimiento en dirección opuesta de ambas ruedas al mismo nivel de potencia.
Punto de giro: la rueda queda fija.
Velocidad: Normal y fricción ocurre
en el punto de giro.
Punto de giro Motor A Motor A hacia adelante
Motor B hacia atrásPunto de giro
Motor B
Código de Testeo Código de Testeo
para Cricket Logo para Cricket Logo
para LogoBlocks para LogoBlocks
Código de ejemplo de movimiento degiro en Cricket Logo (SingleTurn.lgo)
Código de ejemplo de giro tipo pivote conCricket Logo (DoubleTurn.lgo)
Código de ejemplo de movimiento degiro en LogoBlocks (SingleTurn.lbk)
Código de ejemplo de giro tipo pivote conLogoBlocks (DoubleTurn.lbk)
Girar a laizquierda
Motor A hacia adelanteMotor B hacia atrás
Dirección demotor invertida
Girar a laderecha
Punto de giro: entre ambas ruedas.Velocidad: ambos motores a normal y sin fricción en el punto de giro.
29
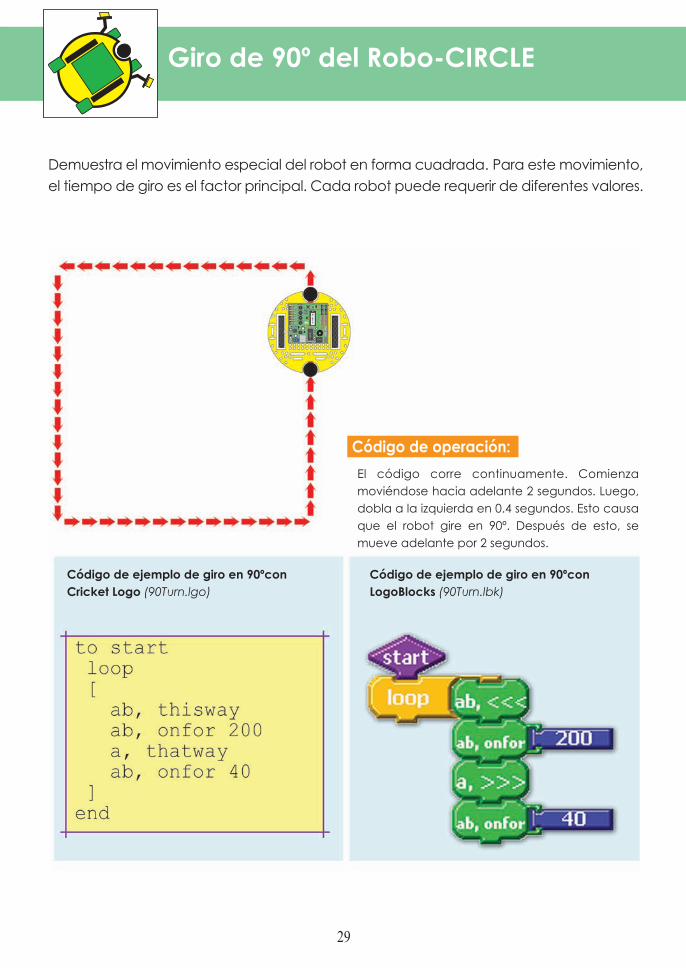
Giro de 90º del Robo-CIRCLE
Demuestra el movimiento especial del robot en forma cuadrada. Para este movimiento, el tiempo de giro es el factor principal. Cada robot puede requerir de diferentes valores.
Código de operación:El código corre continuamente. Comienza moviéndose hacia adelante 2 segundos. Luego, dobla a la izquierda en 0.4 segundos. Esto causa que el robot gire en 90º. Después de esto, se mueve adelante por 2 segundos.
Código de ejemplo de giro en 90ºconCricket Logo (90Turn.lgo)
Código de ejemplo de giro en 90ºconLogoBlocks (90Turn.lbk)
30
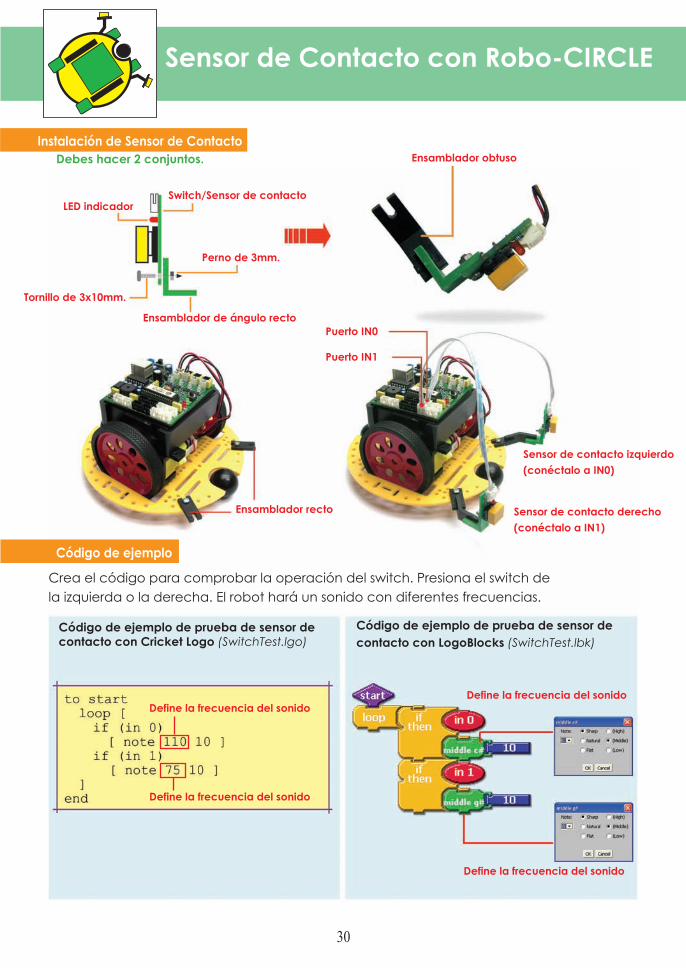
Sensor de Contacto con Robo-CIRCLE
Debes hacer 2 conjuntos.Instalación de Sensor de Contacto
Código de ejemplo
LED indicador
Tornillo de 3x10mm.
Ensamblador de ángulo recto
Perno de 3mm.
Switch/Sensor de contacto
Ensamblador recto
Define la frecuencia del sonidoDefine la frecuencia del sonido
Define la frecuencia del sonido
Define la frecuencia del sonido
Sensor de contacto izquierdo(conéctalo a IN0)
Sensor de contacto derecho (conéctalo a IN1)
Puerto IN0
Puerto IN1
Ensamblador obtuso
Crea el código para comprobar la operación del switch. Presiona el switch de la izquierda o la derecha. El robot hará un sonido con diferentes frecuencias.
Código de ejemplo de prueba de sensor decontacto con LogoBlocks (SwitchTest.lbk)
Código de ejemplo de prueba de sensor de contacto con Cricket Logo (SwitchTest.lgo)
31
Evita obstáculos con el Robo-CIRCLE
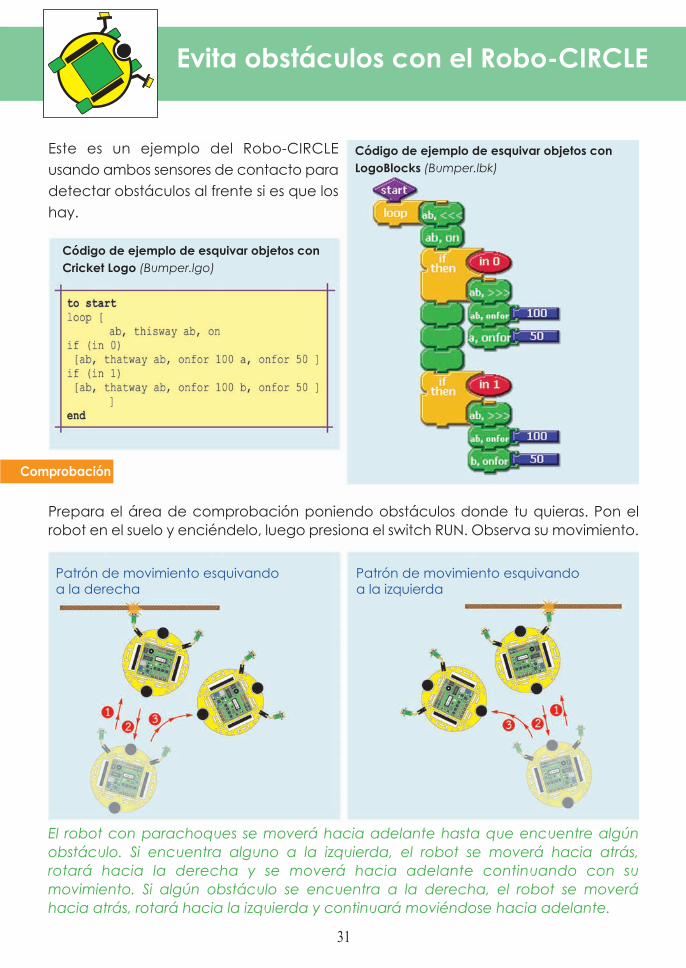
Este es un ejemplo del Robo-CIRCLEusando ambos sensores de contacto para detectar obstáculos al frente si es que los hay.
Prepara el área de comprobación poniendo obstáculos donde tu quieras. Pon el robot en el suelo y enciéndelo, luego presiona el switch RUN. Observa su movimiento.
El robot con parachoques se moverá hacia adelante hasta que encuentre algún obstáculo. Si encuentra alguno a la izquierda, el robot se moverá hacia atrás, rotará hacia la derecha y se moverá hacia adelante continuando con su movimiento. Si algún obstáculo se encuentra a la derecha, el robot se moveráhacia atrás, rotará hacia la izquierda y continuará moviéndose hacia adelante.
Código de ejemplo de esquivar objetos conCricket Logo (Bumper.lgo)
Patrón de movimiento esquivandoa la derecha
Patrón de movimiento esquivandoa la izquierda
Código de ejemplo de esquivar objetos conLogoBlocks (Bumper.lbk)
Comprobación
32
Introducción al sensor de luz (1)
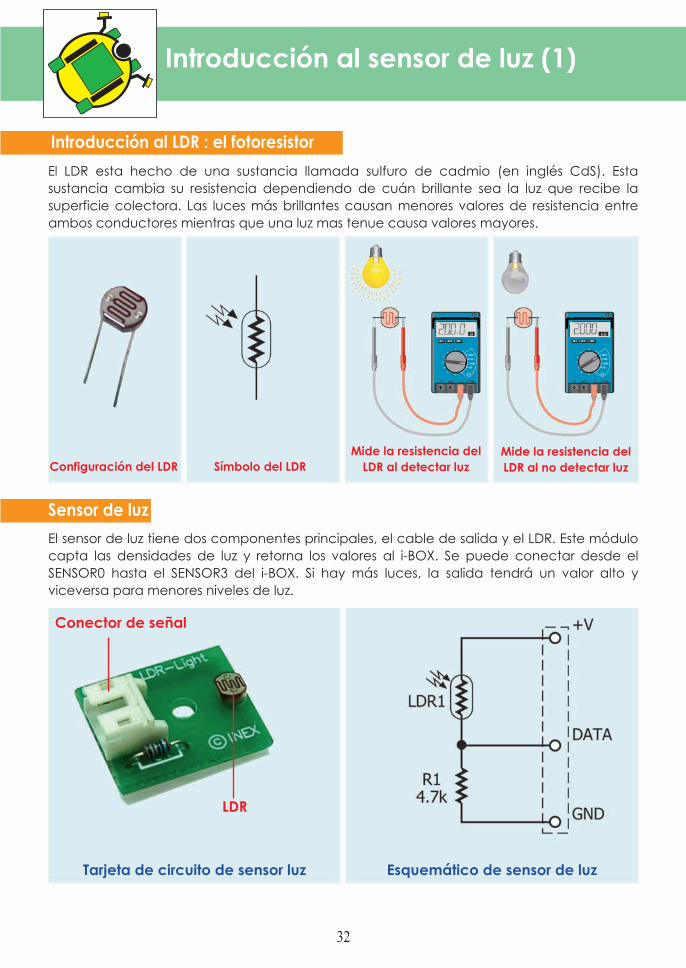
Introducción al LDR : el fotoresistorEl LDR esta hecho de una sustancia llamada sulfuro de cadmio (en inglés CdS). Esta sustancia cambia su resistencia dependiendo de cuán brillante sea la luz que recibe la superficie colectora. Las luces más brillantes causan menores valores de resistencia entre ambos conductores mientras que una luz mas tenue causa valores mayores.
El sensor de luz tiene dos componentes principales, el cable de salida y el LDR. Este módulo capta las densidades de luz y retorna los valores al i-BOX. Se puede conectar desde el SENSOR0 hasta el SENSOR3 del i-BOX. Si hay más luces, la salida tendrá un valor alto y viceversa para menores niveles de luz.
Configuración del LDR
Conector de señal
LDR
Símbolo del LDRMide la resistencia del
LDR al detectar luzMide la resistencia del LDR al no detectar luz
Sensor de luz
Tarjeta de circuito de sensor luz Esquemático de sensor de luz
33
Introducción al sensor de luz (2)
Cálculo
Leyendo con i-BOX
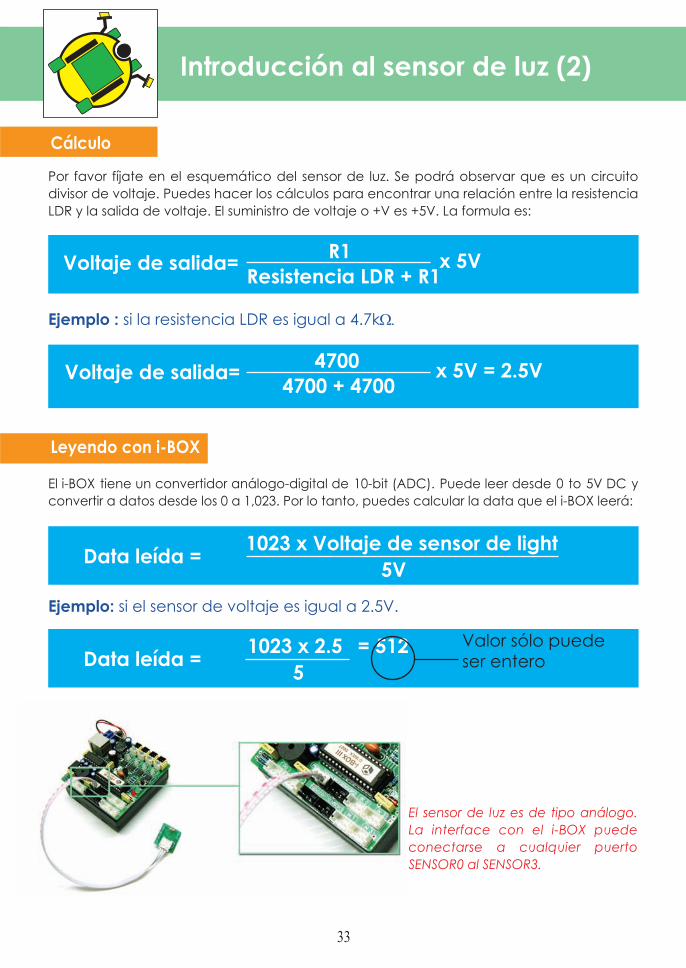
Por favor fíjate en el esquemático del sensor de luz. Se podrá observar que es un circuito divisor de voltaje. Puedes hacer los cálculos para encontrar una relación entre la resistencia LDR y la salida de voltaje. El suministro de voltaje o +V es +5V. La formula es:
El i-BOX tiene un convertidor análogo-digital de 10-bit (ADC). Puede leer desde 0 to 5V DC y convertir a datos desde los 0 a 1,023. Por lo tanto, puedes calcular la data que el i-BOX leerá:
El sensor de luz es de tipo análogo.La interface con el i-BOX puedeconectarse a cualquier puertoSENSOR0 al SENSOR3.
Ejemplo : si la resistencia LDR es igual a 4.7kW.
Ejemplo: si el sensor de voltaje es igual a 2.5V.
Voltaje de salida=
Data leída =
Data leída = Valor sólo puedeser entero
Voltaje de salida=
x 5V
x 5V = 2.5V
R1
1023 x Voltaje de sensor de light
1023 x 2.5 = 512
4700
Resistencia LDR + R1
5V
5
4700 + 4700
34
Robo-CIRCLE controlado por luz (1)
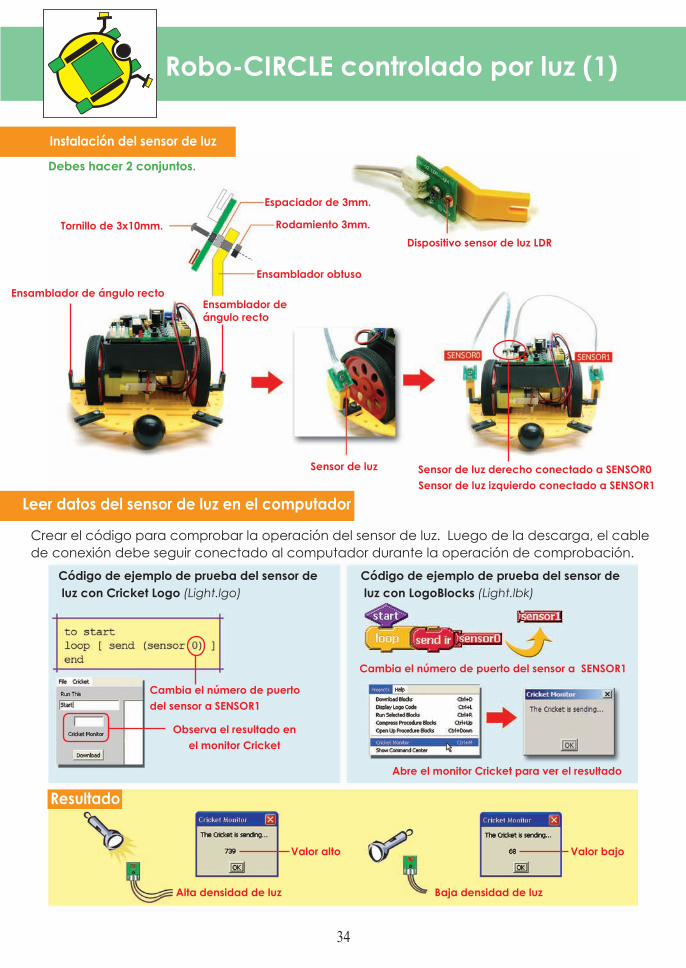
Instalación del sensor de luz
Leer datos del sensor de luz en el computador
Resultado
Crear el código para comprobar la operación del sensor de luz. Luego de la descarga, el cable de conexión debe seguir conectado al computador durante la operación de comprobación.
Debes hacer 2 conjuntos.
Tornillo de 3x10mm.
Espaciador de 3mm.
Dispositivo sensor de luz LDR
Ensamblador de ángulo recto
Cambia el número de puerto del sensor a SENSOR1
Cambia el número de puerto del sensor a SENSOR1
Abre el monitor Cricket para ver el resultado
Observa el resultado en el monitor Cricket
Valor alto Valor bajo
Alta densidad de luz Baja densidad de luz
Ensamblador deángulo recto
Sensor de luz Sensor de luz derecho conectado a SENSOR0Sensor de luz izquierdo conectado a SENSOR1
Rodamiento 3mm.
Ensamblador obtuso
Código de ejemplo de prueba del sensor de luz con Cricket Logo (Light.lgo)
Código de ejemplo de prueba del sensor de luz con LogoBlocks (Light.lbk)
35
Robo-CIRCLE controlado por luz (2)
Concepto
Diagrama de flujo
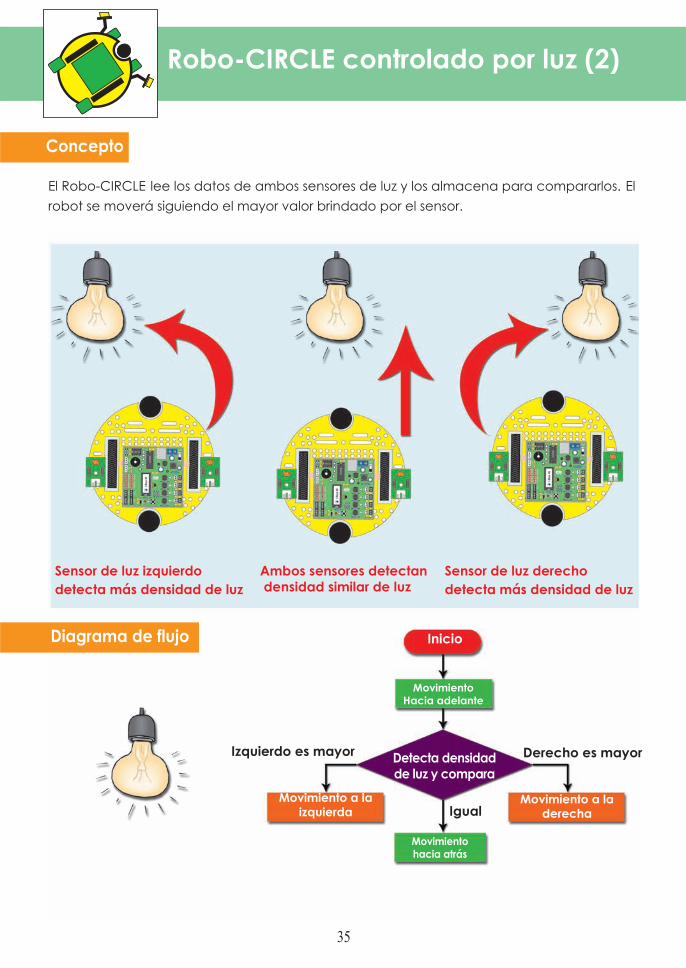
El Robo-CIRCLE lee los datos de ambos sensores de luz y los almacena para compararlos. El robot se moverá siguiendo el mayor valor brindado por el sensor.
Sensor de luz izquierdodetecta más densidad de luz
Ambos sensores detectan densidad similar de luz
Inicio
MovimientoHacia adelante
Movimiento a laizquierda
Movimientohacia atrás
Movimiento a laderecha
Izquierdo es mayor Derecho es mayor
Igual
Detecta densidad de luz y compara
Sensor de luz derechodetecta más densidad de luz
36
Robo-CIRCLE controlado por luz (3)
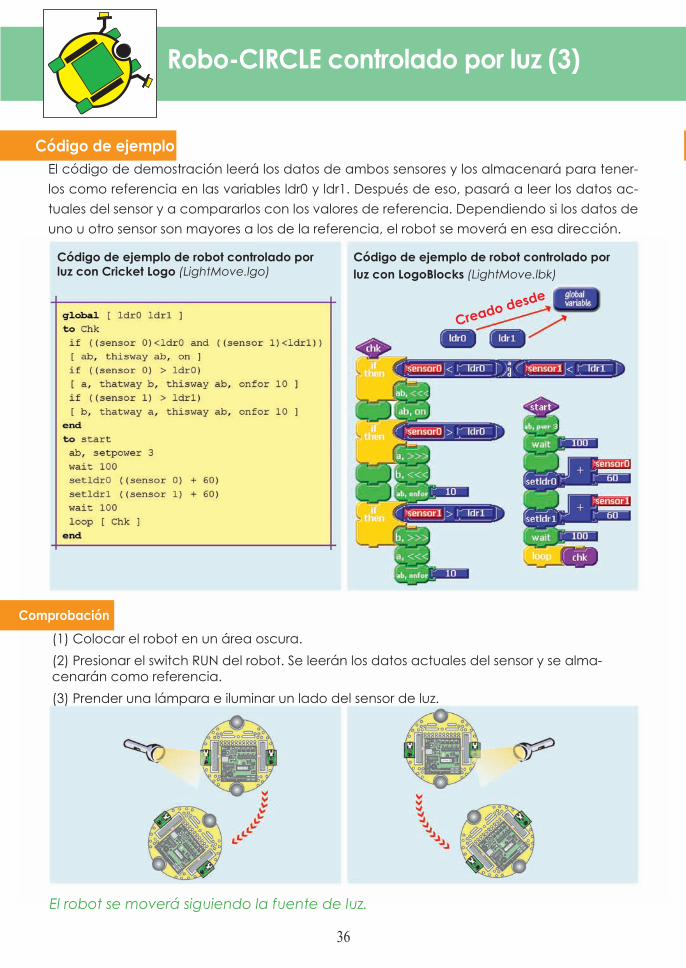
Código de ejemploEl código de demostración leerá los datos de ambos sensores y los almacenará para tener-los como referencia en las variables ldr0 y ldr1. Después de eso, pasará a leer los datos ac-tuales del sensor y a compararlos con los valores de referencia. Dependiendo si los datos de uno u otro sensor son mayores a los de la referencia, el robot se moverá en esa dirección.
Código de ejemplo de robot controlado porluz con LogoBlocks (LightMove.lbk)
Creado desde
Comprobación(1) Colocar el robot en un área oscura.(2) Presionar el switch RUN del robot. Se leerán los datos actuales del sensor y se alma-cenarán como referencia.(3) Prender una lámpara e iluminar un lado del sensor de luz.
El robot se moverá siguiendo la fuente de luz.
Código de ejemplo de robot controlado por luz con Cricket Logo (LightMove.lgo)
37
Módulo sensor reflector infrarrojo TCRT5000
Módulo sensor reflector infrarrojo Gráfico característico del módulo TCRT5000
Col
lect
or c
urre
nt (m
A)
Distance (mm.)
Tarjeta de circuito de sensorreflector infrarrojo
Foto-transistorFoto-transistor
LED infrarrojo
LED infrarrojo
Conector de señal
¿Cómo funciona?
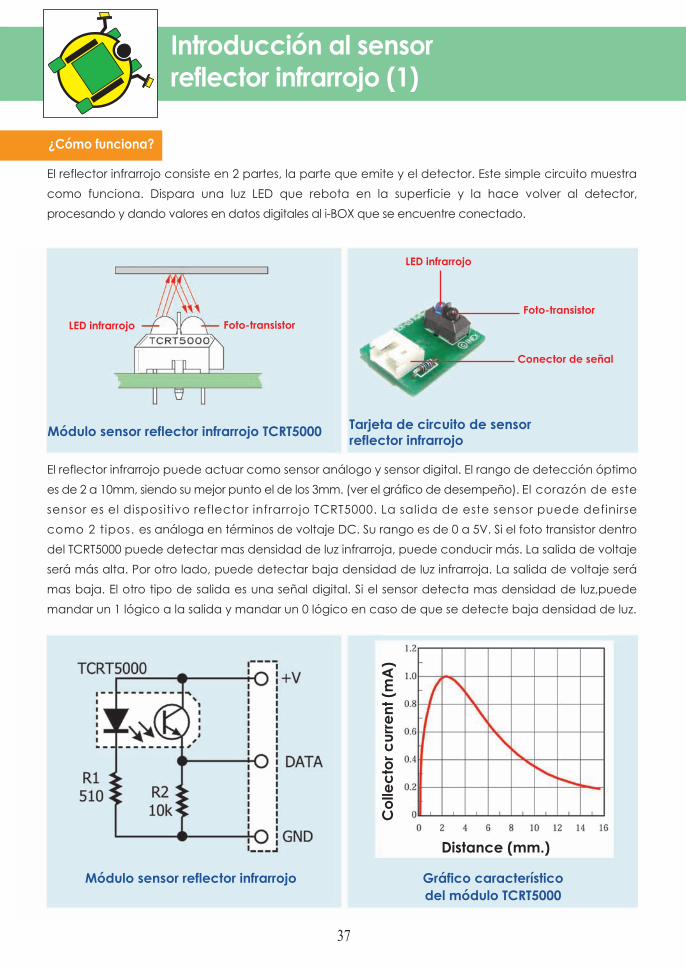
El reflector infrarrojo consiste en 2 partes, la parte que emite y el detector. Este simple circuito muestra como funciona. Dispara una luz LED que rebota en la superficie y la hace volver al detector, procesando y dando valores en datos digitales al i-BOX que se encuentre conectado.
El reflector infrarrojo puede actuar como sensor análogo y sensor digital. El rango de detección óptimo es de 2 a 10mm, siendo su mejor punto el de los 3mm. (ver el gráfico de desempeño). El corazón de este sensor es el dispositivo reflector infrarrojo TCRT5000. La salida de este sensor puede definirse como 2 tipos. es análoga en términos de voltaje DC. Su rango es de 0 a 5V. Si el foto transistor dentro del TCRT5000 puede detectar mas densidad de luz infrarroja, puede conducir más. La salida de voltaje será más alta. Por otro lado, puede detectar baja densidad de luz infrarroja. La salida de voltaje serámas baja. El otro tipo de salida es una señal digital. Si el sensor detecta mas densidad de luz,puede mandar un 1 lógico a la salida y mandar un 0 lógico en caso de que se detecte baja densidad de luz.
Introducción al sensorreflector infrarrojo (1)
38
Instalación del sensor reflector infrarrojo
Cómo usar el sensor reflector infrarrojo (1)
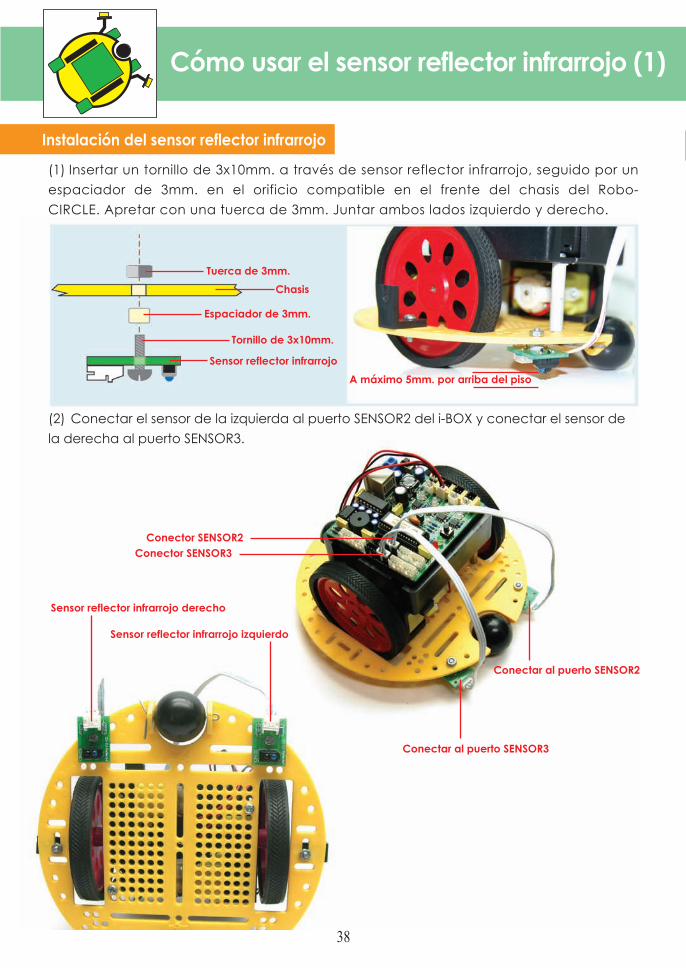
(1) Insertar un tornillo de 3x10mm. a través de sensor reflector infrarrojo, seguido por un espaciador de 3mm. en el orificio compatible en el frente del chasis del Robo-CIRCLE. Apretar con una tuerca de 3mm. Juntar ambos lados izquierdo y derecho.
(2) Conectar el sensor de la izquierda al puerto SENSOR2 del i-BOX y conectar el sensor de la derecha al puerto SENSOR3.
Tuerca de 3mm.Chasis
Espaciador de 3mm.
Tornillo de 3x10mm.
Sensor reflector infrarrojo
Conector SENSOR2Conector SENSOR3
Sensor reflector infrarrojo derecho
Sensor reflector infrarrojo izquierdo
Conectar al puerto SENSOR3
Conectar al puerto SENSOR2
A máximo 5mm. por arriba del piso
39
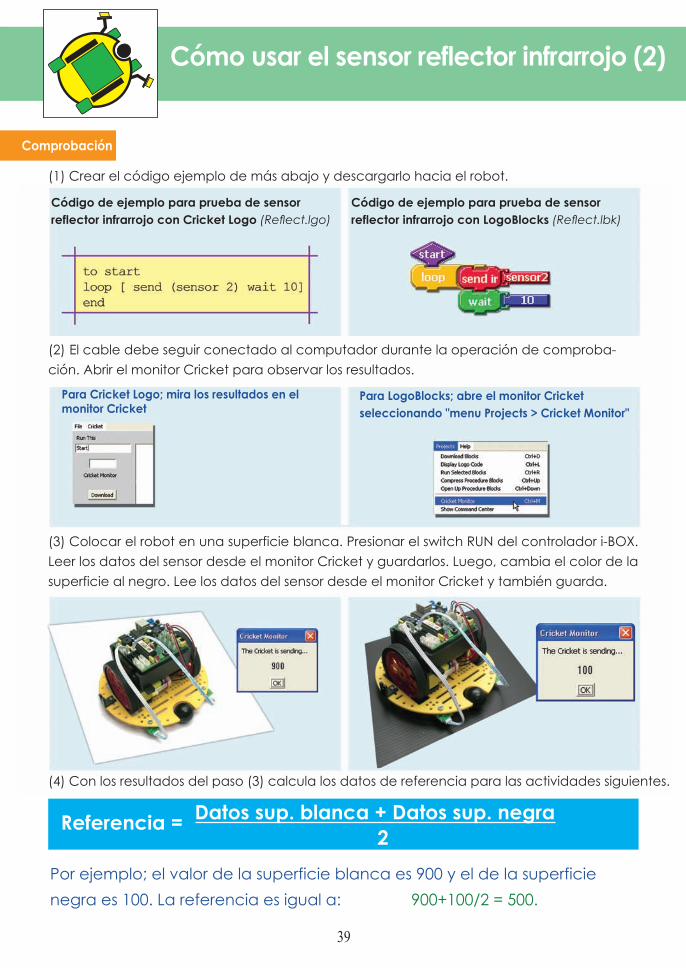
Comprobación
Cómo usar el sensor reflector infrarrojo (2)
(1) Crear el código ejemplo de más abajo y descargarlo hacia el robot.
(2) El cable debe seguir conectado al computador durante la operación de comproba-ción. Abrir el monitor Cricket para observar los resultados.
(3) Colocar el robot en una superficie blanca. Presionar el switch RUN del controlador i-BOX. Leer los datos del sensor desde el monitor Cricket y guardarlos. Luego, cambia el color de la superficie al negro. Lee los datos del sensor desde el monitor Cricket y también guarda.
(4) Con los resultados del paso (3) calcula los datos de referencia para las actividades siguientes.
Código de ejemplo para prueba de sensorreflector infrarrojo con Cricket Logo (Reflect.lgo)
Código de ejemplo para prueba de sensorreflector infrarrojo con LogoBlocks (Reflect.lbk)
Para LogoBlocks; abre el monitor Cricketseleccionando "menu Projects > Cricket Monitor"
Referencia = Datos sup. blanca + Datos sup. negra2
Por ejemplo; el valor de la superficie blanca es 900 y el de la superficie negra es 100. La referencia es igual a: 900+100/2 = 500.
Para Cricket Logo; mira los resultados en el monitor Cricket
40
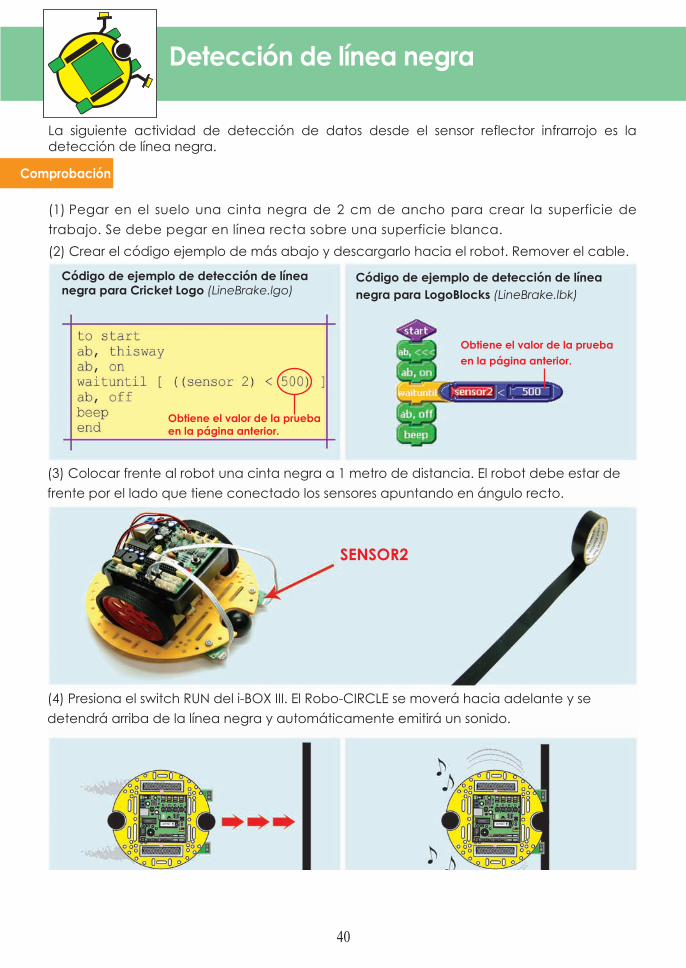
Comprobación
Detección de línea negra
La siguiente actividad de detección de datos desde el sensor reflector infrarrojo es la detección de línea negra.
(1) Pegar en el suelo una cinta negra de 2 cm de ancho para crear la superficie de trabajo. Se debe pegar en línea recta sobre una superficie blanca.(2) Crear el código ejemplo de más abajo y descargarlo hacia el robot. Remover el cable.
Código de ejemplo de detección de líneanegra para LogoBlocks (LineBrake.lbk)
Obtiene el valor de la prueba en la página anterior.
SENSOR2
Obtiene el valor de la prueba en la página anterior.
(3) Colocar frente al robot una cinta negra a 1 metro de distancia. El robot debe estar de frente por el lado que tiene conectado los sensores apuntando en ángulo recto.
(4) Presiona el switch RUN del i-BOX III. El Robo-CIRCLE se moverá hacia adelante y se detendrá arriba de la línea negra y automáticamente emitirá un sonido.
Código de ejemplo de detección de línea negra para Cricket Logo (LineBrake.lgo)
41
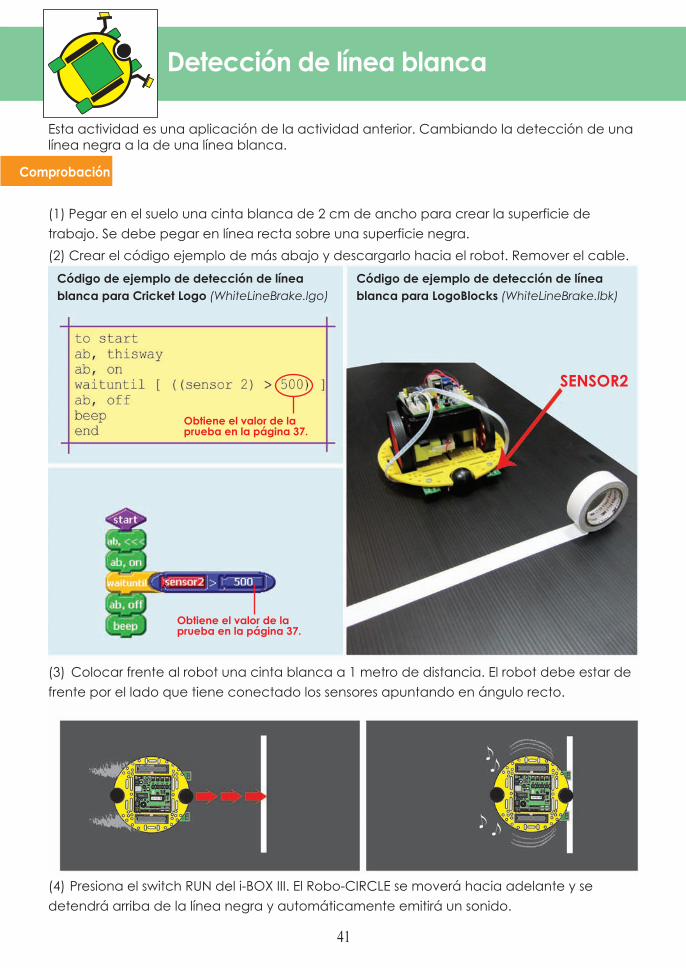
Comprobación
Detección de línea blanca
Esta actividad es una aplicación de la actividad anterior. Cambiando la detección de una línea negra a la de una línea blanca.
(1) Pegar en el suelo una cinta blanca de 2 cm de ancho para crear la superficie de trabajo. Se debe pegar en línea recta sobre una superficie negra.
(2) Crear el código ejemplo de más abajo y descargarlo hacia el robot. Remover el cable.
(3) Colocar frente al robot una cinta blanca a 1 metro de distancia. El robot debe estar de frente por el lado que tiene conectado los sensores apuntando en ángulo recto.
(4) Presiona el switch RUN del i-BOX III. El Robo-CIRCLE se moverá hacia adelante y se detendrá arriba de la línea negra y automáticamente emitirá un sonido.
Código de ejemplo de detección de líneablanca para Cricket Logo (WhiteLineBrake.lgo)
Código de ejemplo de detección de líneablanca para LogoBlocks (WhiteLineBrake.lbk)
Obtiene el valor de la prueba en la página 37.
Obtiene el valor de la prueba en la página 37.
SENSOR2
42
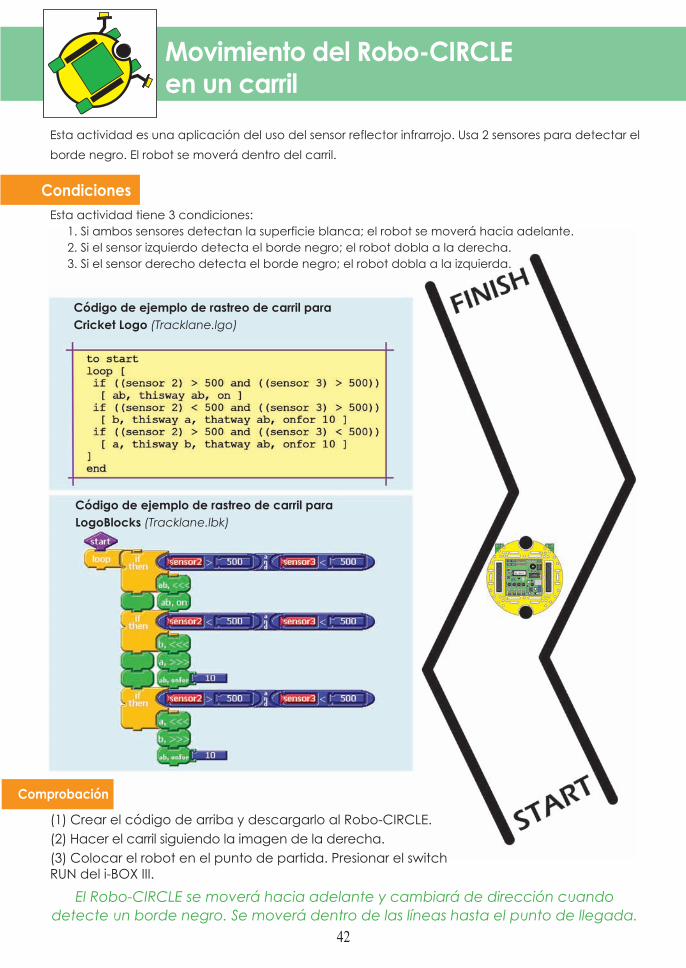
Condiciones
Movimiento del Robo-CIRCLEen un carril
Esta actividad es una aplicación del uso del sensor reflector infrarrojo. Usa 2 sensores para detectar el borde negro. El robot se moverá dentro del carril.
Esta actividad tiene 3 condiciones:1. Si ambos sensores detectan la superficie blanca; el robot se moverá hacia adelante.2. Si el sensor izquierdo detecta el borde negro; el robot dobla a la derecha.3. Si el sensor derecho detecta el borde negro; el robot dobla a la izquierda.
(1) Crear el código de arriba y descargarlo al Robo-CIRCLE.(2) Hacer el carril siguiendo la imagen de la derecha.(3) Colocar el robot en el punto de partida. Presionar el switch RUN del i-BOX III.
Código de ejemplo de rastreo de carril paraCricket Logo (Tracklane.lgo)
Código de ejemplo de rastreo de carril paraLogoBlocks (Tracklane.lbk)
Comprobación
El Robo-CIRCLE se moverá hacia adelante y cambiará de dirección cuando detecte un borde negro. Se moverá dentro de las líneas hasta el punto de llegada.
43
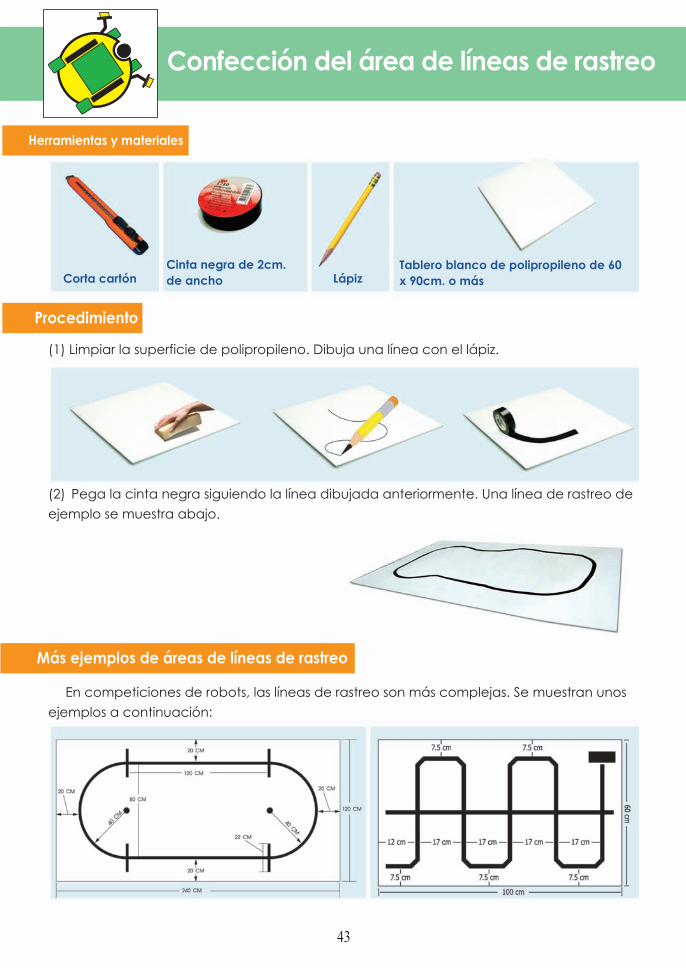
Herramientas y materiales
Procedimiento
Más ejemplos de áreas de líneas de rastreo
Confección del área de líneas de rastreo
(1) Limpiar la superficie de polipropileno. Dibuja una línea con el lápiz.
(2) Pega la cinta negra siguiendo la línea dibujada anteriormente. Una línea de rastreo de
ejemplo se muestra abajo.
En competiciones de robots, las líneas de rastreo son más complejas. Se muestran unos ejemplos a continuación:
Corta cartónCinta negra de 2cm.de ancho Lápiz
Tablero blanco de polipropileno de 60 x 90cm. o más
44
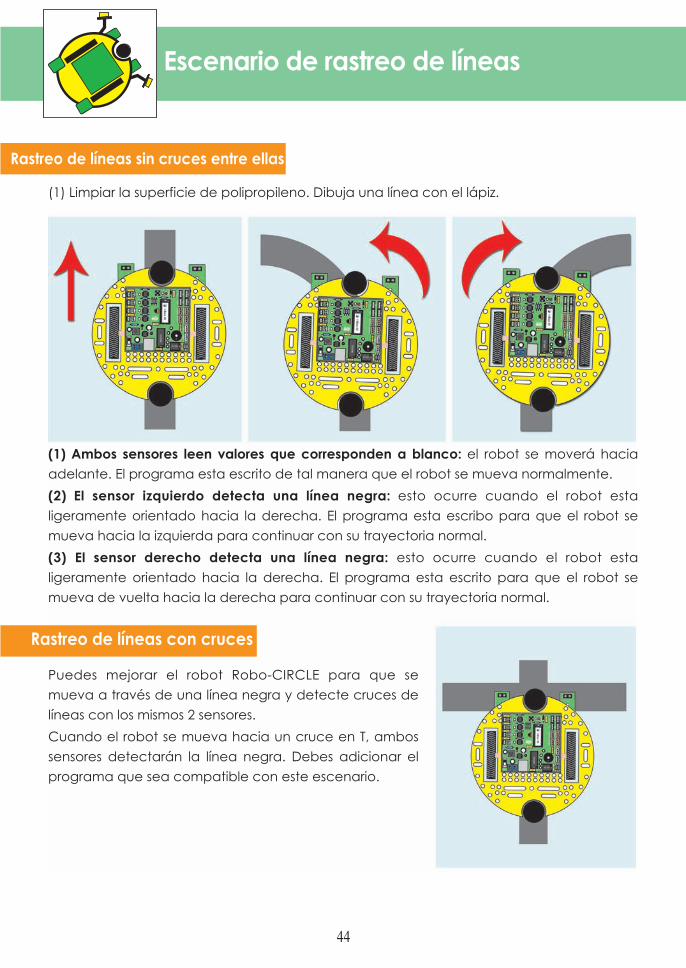
Rastreo de líneas sin cruces entre ellas
Escenario de rastreo de líneas
(1) Limpiar la superficie de polipropileno. Dibuja una línea con el lápiz.
(1) Ambos sensores leen valores que corresponden a blanco: el robot se moverá hacia adelante. El programa esta escrito de tal manera que el robot se mueva normalmente.(2) El sensor izquierdo detecta una línea negra: esto ocurre cuando el robot esta ligeramente orientado hacia la derecha. El programa esta escribo para que el robot se mueva hacia la izquierda para continuar con su trayectoria normal.(3) El sensor derecho detecta una línea negra: esto ocurre cuando el robot esta ligeramente orientado hacia la derecha. El programa esta escrito para que el robot se mueva de vuelta hacia la derecha para continuar con su trayectoria normal.
Puedes mejorar el robot Robo-CIRCLE para que se mueva a través de una línea negra y detecte cruces de líneas con los mismos 2 sensores.
Cuando el robot se mueva hacia un cruce en T, ambos sensores detectarán la línea negra. Debes adicionar el programa que sea compatible con este escenario.
Rastreo de líneas con cruces
45
Rastreo de líneas con Robo-CIRCLE (1)
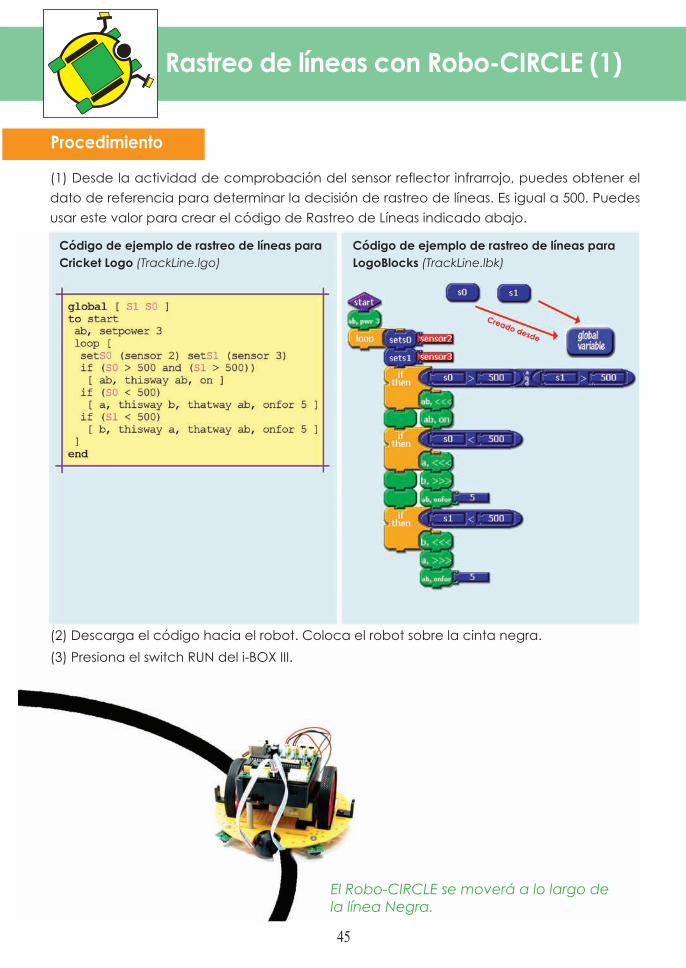
Procedimiento
(1) Desde la actividad de comprobación del sensor reflector infrarrojo, puedes obtener el dato de referencia para determinar la decisión de rastreo de líneas. Es igual a 500. Puedes usar este valor para crear el código de Rastreo de Líneas indicado abajo.
(2) Descarga el código hacia el robot. Coloca el robot sobre la cinta negra.(3) Presiona el switch RUN del i-BOX III.
Código de ejemplo de rastreo de líneas paraCricket Logo (TrackLine.lgo)
Código de ejemplo de rastreo de líneas paraLogoBlocks (TrackLine.lbk)
Creado desde
El Robo-CIRCLE se moverá a lo largo dela línea Negra.
46
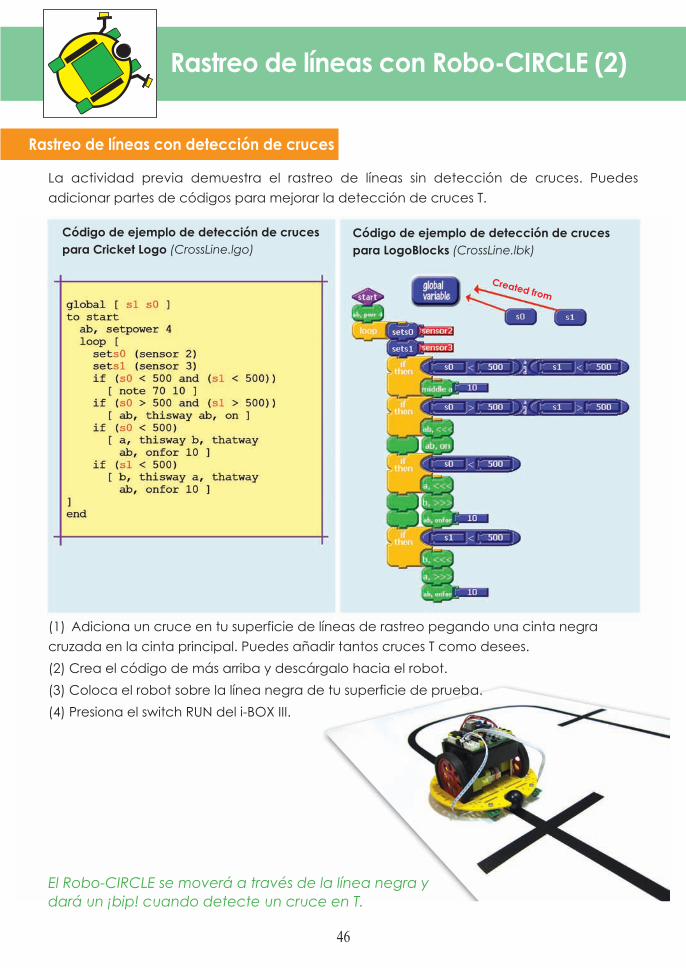
Rastreo de líneas con Robo-CIRCLE (2)
Rastreo de líneas con detección de cruces
La actividad previa demuestra el rastreo de líneas sin detección de cruces. Puedes
adicionar partes de códigos para mejorar la detección de cruces T.
(1) Adiciona un cruce en tu superficie de líneas de rastreo pegando una cinta negra cruzada en la cinta principal. Puedes añadir tantos cruces T como desees.(2) Crea el código de más arriba y descárgalo hacia el robot.(3) Coloca el robot sobre la línea negra de tu superficie de prueba.(4) Presiona el switch RUN del i-BOX III.
Código de ejemplo de detección de crucespara LogoBlocks (CrossLine.lbk)
Código de ejemplo de detección de crucespara Cricket Logo (CrossLine.lgo)
Created from
El Robo-CIRCLE se moverá a través de la línea negra ydará un ¡bip! cuando detecte un cruce en T.
47
Detección de bordes con Robo-CIRCLE (1)
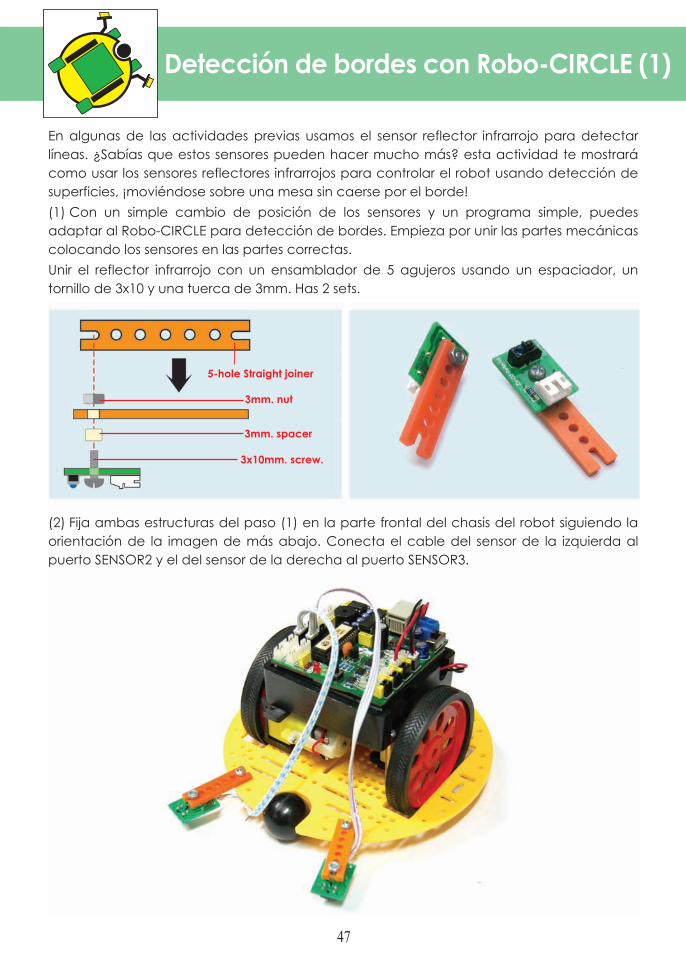
En algunas de las actividades previas usamos el sensor reflector infrarrojo para detectar líneas. ¿Sabías que estos sensores pueden hacer mucho más? esta actividad te mostrarácomo usar los sensores reflectores infrarrojos para controlar el robot usando detección de superficies, ¡moviéndose sobre una mesa sin caerse por el borde!(1) Con un simple cambio de posición de los sensores y un programa simple, puedes adaptar al Robo-CIRCLE para detección de bordes. Empieza por unir las partes mecánicas colocando los sensores en las partes correctas.Unir el reflector infrarrojo con un ensamblador de 5 agujeros usando un espaciador, un tornillo de 3x10 y una tuerca de 3mm. Has 2 sets.
(2) Fija ambas estructuras del paso (1) en la parte frontal del chasis del robot siguiendo la orientación de la imagen de más abajo. Conecta el cable del sensor de la izquierda al puerto SENSOR2 y el del sensor de la derecha al puerto SENSOR3.
3mm. nut
5-hole Straight joiner
3mm. spacer
3x10mm. screw.
48
Detección de bordes con Robo-CIRCLE (2)
Esta actividad muestra este interesante comportamiento; el Robo-CIRCLE se moverá sobre una mesa y nunca se caerá de ella. Al usar 2 reflectores infrarrojos fijados a la parte frontal del robot, podrás detectar el área externa de la mesa. Es similar al código de rastreo de líneas. Si los sensores detectan superficie, darán datos altos. Una vez que los sensores salgan del límite de la mesa, no habrá rayos infrarrojos que se reflecten desde la superficie hacia el sensor, por lo tanto, el valor que retorne de los sensores será cercano a 0.
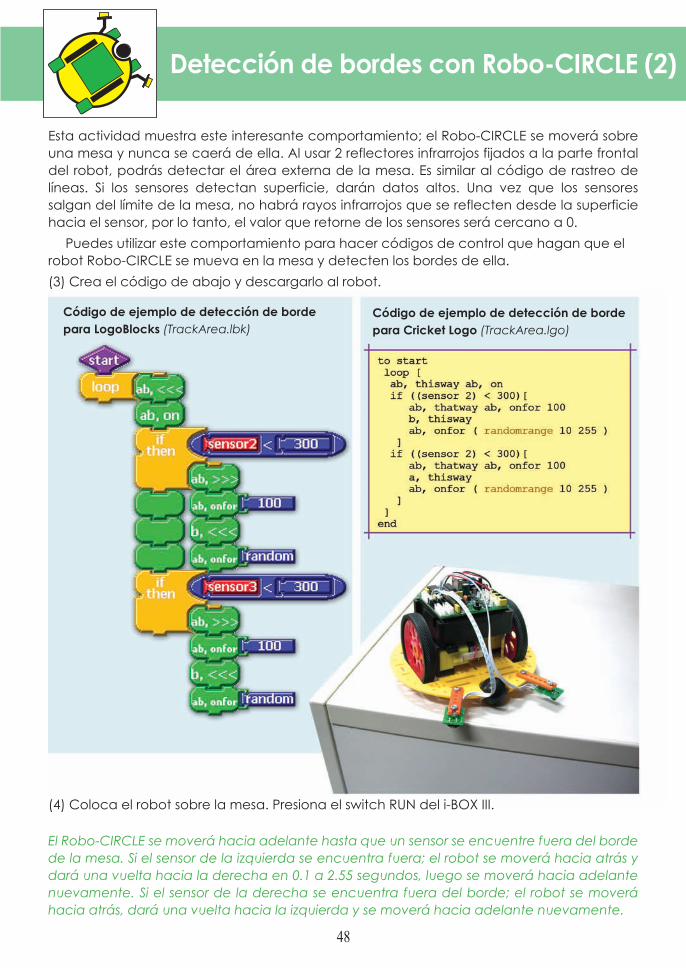
Puedes utilizar este comportamiento para hacer códigos de control que hagan que el robot Robo-CIRCLE se mueva en la mesa y detecten los bordes de ella.(3) Crea el código de abajo y descargarlo al robot.
Código de ejemplo de detección de bordepara LogoBlocks (TrackArea.lbk)
(4) Coloca el robot sobre la mesa. Presiona el switch RUN del i-BOX III.
El Robo-CIRCLE se moverá hacia adelante hasta que un sensor se encuentre fuera del borde de la mesa. Si el sensor de la izquierda se encuentra fuera; el robot se moverá hacia atrás y dará una vuelta hacia la derecha en 0.1 a 2.55 segundos, luego se moverá hacia adelante nuevamente. Si el sensor de la derecha se encuentra fuera del borde; el robot se moverá hacia atrás, dará una vuelta hacia la izquierda y se moverá hacia adelante nuevamente.
Código de ejemplo de detección de bordepara Cricket Logo (TrackArea.lgo)
49
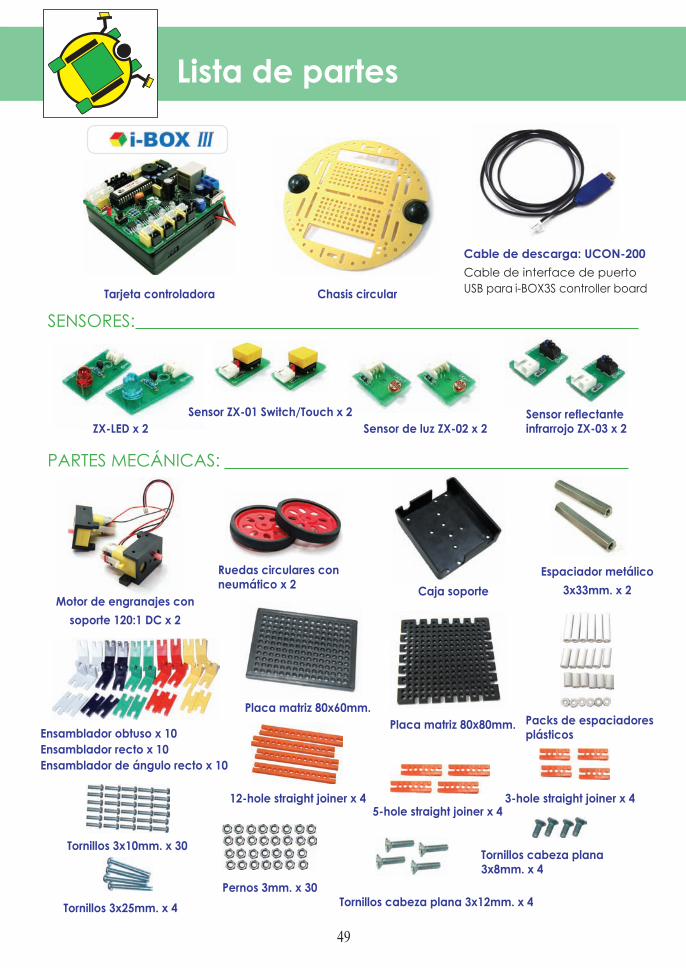
Lista de partes
SENSORES:
Cable de descarga: UCON-200Cable de interface de puerto USB para i-BOX3S controller board
ZX-LED x 2
Motor de engranajes con soporte 120:1 DC x 2
Ensamblador obtuso x 10Ensamblador recto x 10Ensamblador de ángulo recto x 10
Placa matriz 80x60mm.
12-hole straight joiner x 4
Tornillos 3x10mm. x 30
Tornillos 3x25mm. x 4Pernos 3mm. x 30
Tornillos cabeza plana 3x8mm. x 4
Tornillos cabeza plana 3x12mm. x 4
5-hole straight joiner x 43-hole straight joiner x 4
Placa matriz 80x80mm. Packs de espaciadoresplásticos
Ruedas circulares conneumático x 2 Caja soporte
Espaciador metálico 3x33mm. x 2
Sensor ZX-01 Switch/Touch x 2Sensor de luz ZX-02 x 2
Chasis circularTarjeta controladora
Sensor reflectante infrarrojo ZX-03 x 2
PARTES MECÁNICAS:

48
www. inexg lobal .com
Reflectores Luz Switch Luz LED
Innovative Experiment Co.,Ltdwww.inexglobal.com
Sensores





























