Embed Size (px)
Citation preview
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
22
TodayToday
● Introduction ● Camera Model
– Survey on homogeneous coordinate rappresentation
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
33
Why these lessons?Why these lessons?
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
44
Why these lessons?Why these lessons?
??
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
55
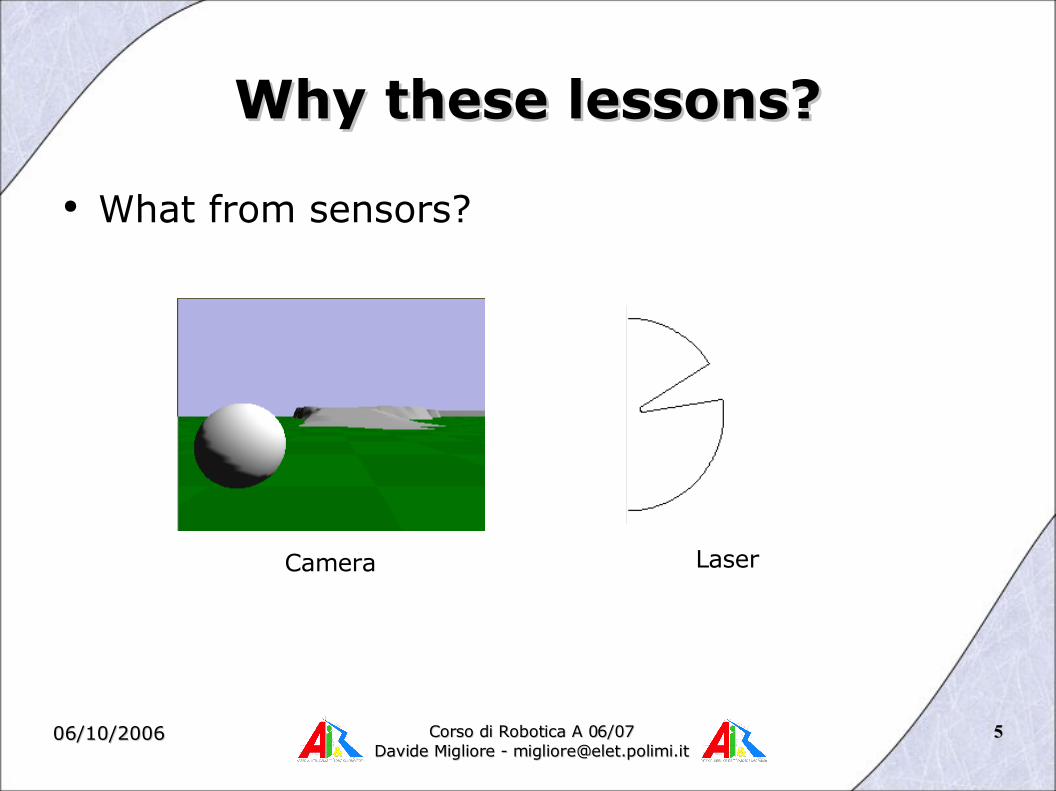
Why these lessons?Why these lessons?
● What from sensors?
Camera Laser
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
66
Why these lessons?Why these lessons?
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
77
Why these lessons?Why these lessons?
??
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
88
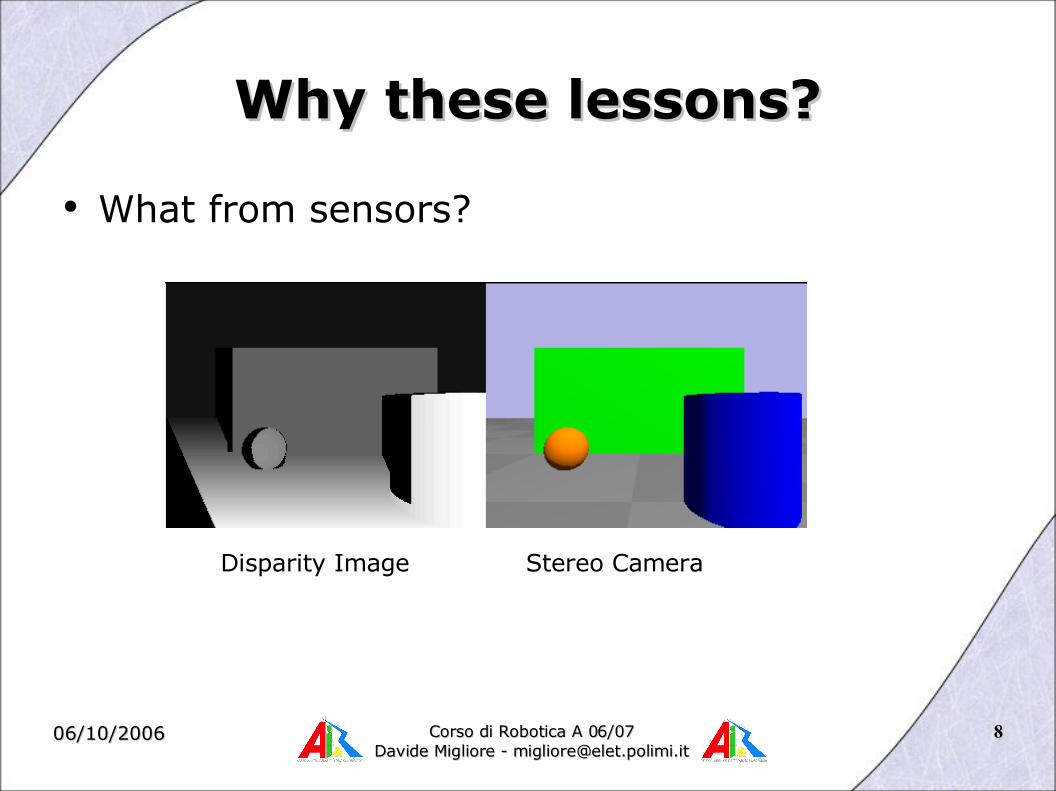
Why these lessons?Why these lessons?
● What from sensors?
Disparity Image Stereo Camera
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
99
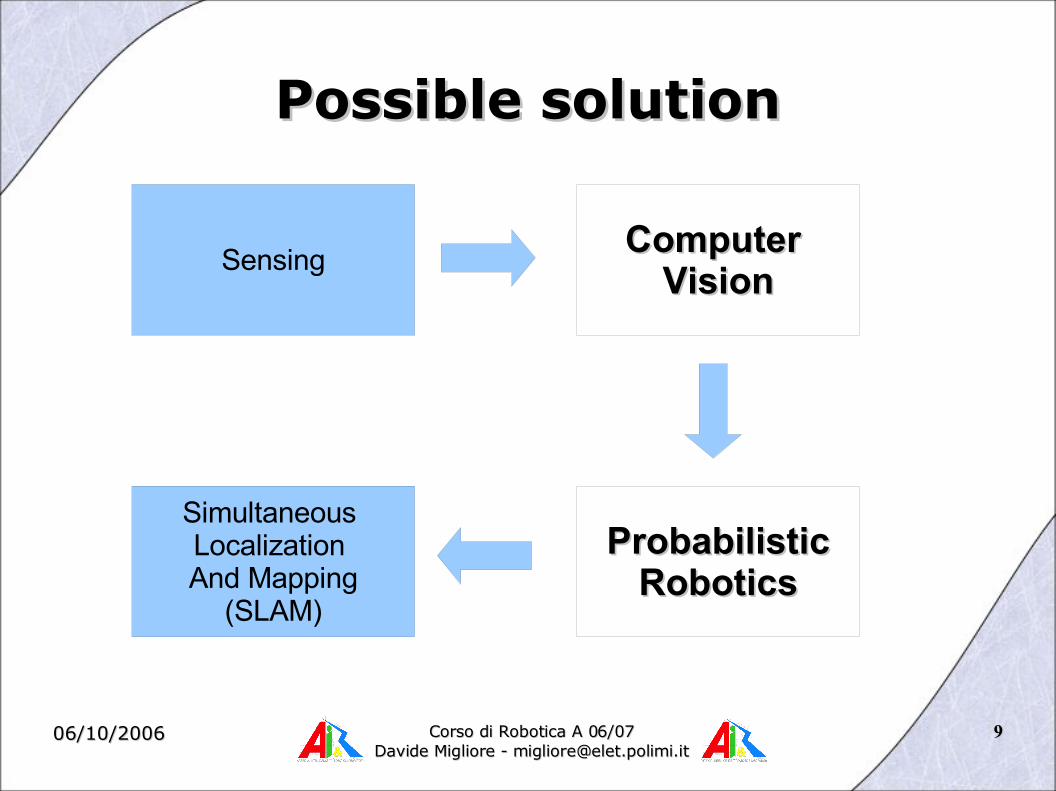
Possible solutionPossible solution
Sensing
Simultaneous Localization And Mapping
(SLAM)
Computer Computer VisionVision
ProbabilisticProbabilisticRoboticsRobotics
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
1010
Why study Computer Vision?Why study Computer Vision?
● Images and movies are simple to acquire.● Fast-growing collection of useful applications
– building representations of the 3D world from pictures
– automated surveillance, object tracking– obstacle detection and robot localization
● Now cameras are inexpensive
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
1111
What can I do with C.V.?What can I do with C.V.?
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
1212
Why Probabilistic Robotics?Why Probabilistic Robotics?
● A new and growing area in robotics, concerned with perception and control in the face of uncertainty.
● Uncertainty arises from four major factors:– Environment stochastic, unpredictable– Robot stochastic– Sensor limited, noisy– Models inaccurate
● Key idea: Explicit representation of uncertainty
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
1313
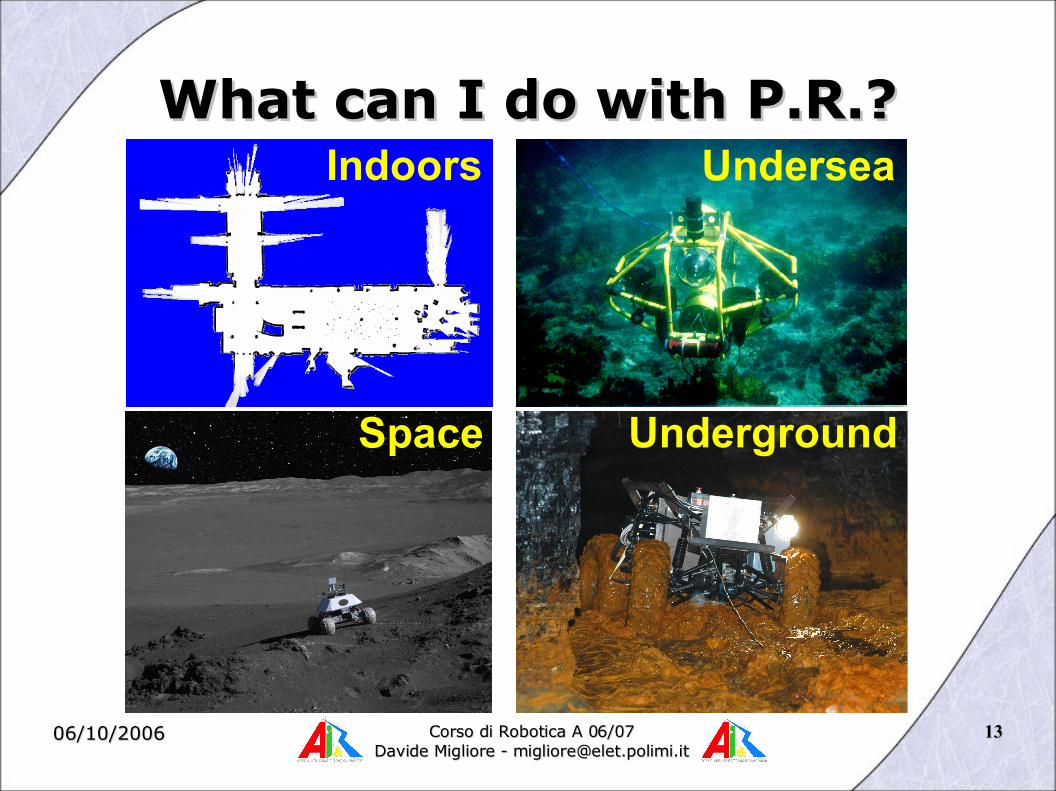
What can I do with P.R.?What can I do with P.R.?Indoors
Space
Undersea
Underground
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
1414
Purpose of these lessonsPurpose of these lessons
● To provide an introduction to the uses of visual sensing and probabilistic methods for mobile robotic tasks.
● A survey of the mathematical and algorithmic problems that recur in its application.
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
1515
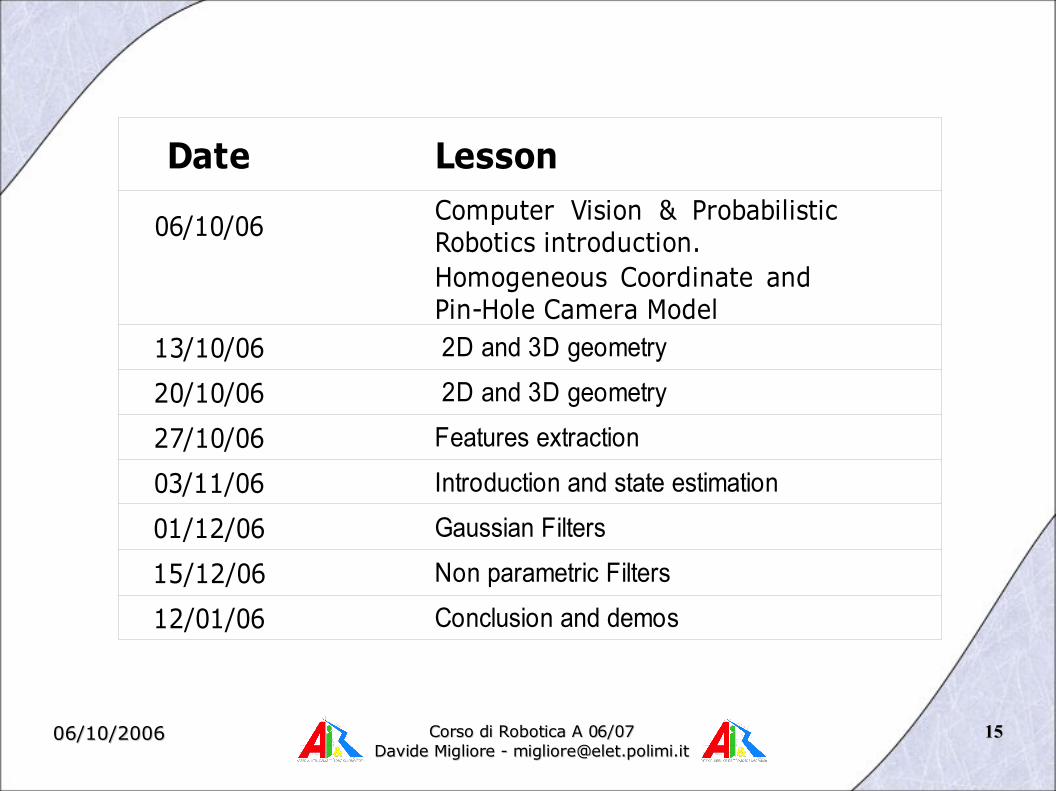
Date Lesson
06/10/06
13/10/06 2D and 3D geometry
20/10/06 2D and 3D geometry
27/10/06 Features extraction
03/11/06 Introduction and state estimation
01/12/06 Gaussian Filters
15/12/06 Non parametric Filters
12/01/06 Conclusion and demos
Computer Vision & Probabilistic Robotics introduction.Homogeneous Coordinate and Pin-Hole Camera Model
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
1616
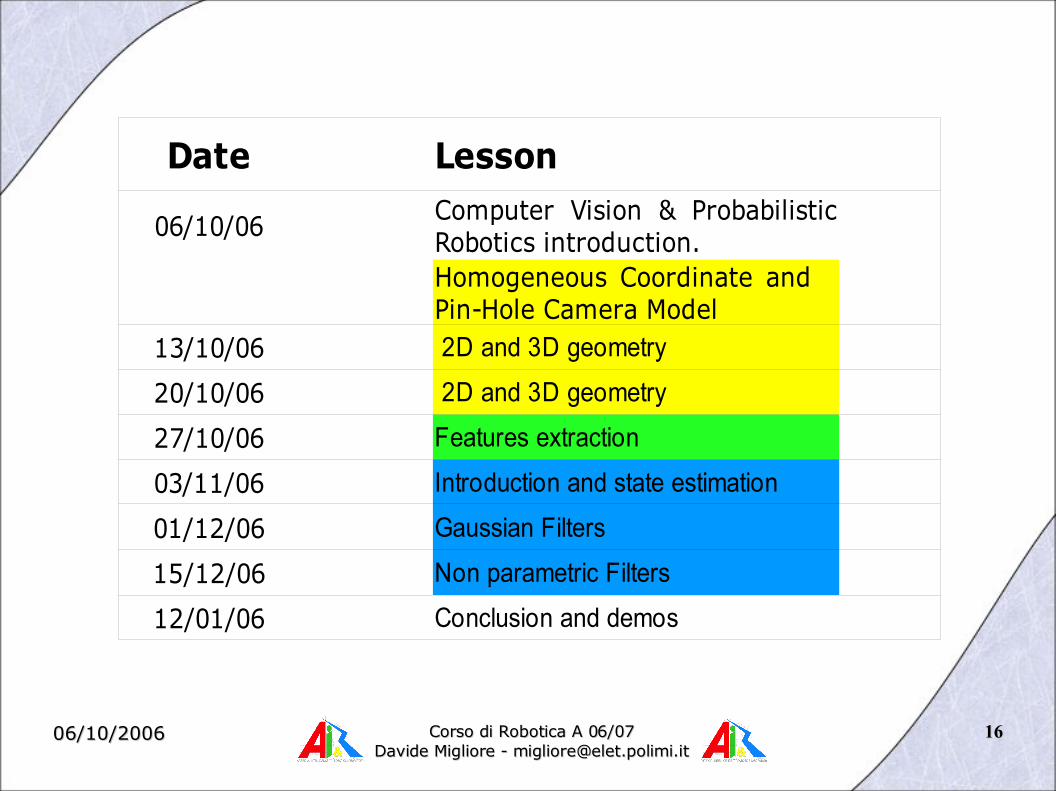
Date Lesson
06/10/06
13/10/06 2D and 3D geometry
20/10/06 2D and 3D geometry
27/10/06 Features extraction
03/11/06 Introduction and state estimation
01/12/06 Gaussian Filters
15/12/06 Non parametric Filters
12/01/06 Conclusion and demos
Computer Vision & Probabilistic Robotics introduction.Homogeneous Coordinate and Pin-Hole Camera Model
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
1717
ReferencesReferences
● “Multiple View Geometry”, R.Hartley and A.Zisserman, ed. Cambridge University Press, 2nd edition 2003.● “An Invitation to 3D Vision”, Y.Ma, S.Soatto, J.Kosecka, S.S.Sastry, ed. Springer, 2000. ● “Probabilistic Robotics”, S.Thrun, W.Burgard, D.Fox, ed. MIT Press 2005.● “Robotica”, G.Gini and V.Caglioti, ed. Zanichelli, 2003.
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
1818
The Camera The Camera andand
Homogeneous RepresentationHomogeneous Representation
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
1919
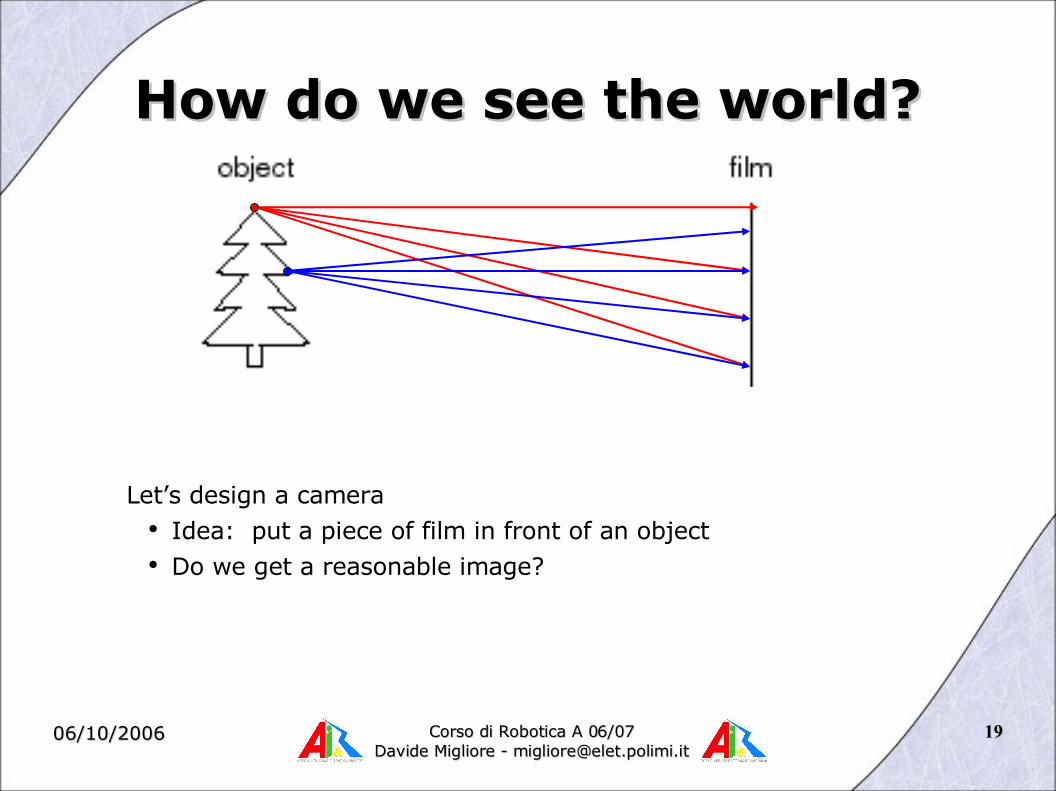
How do we see the world?How do we see the world?
Let’s design a camera● Idea: put a piece of film in front of an object● Do we get a reasonable image?
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
2020
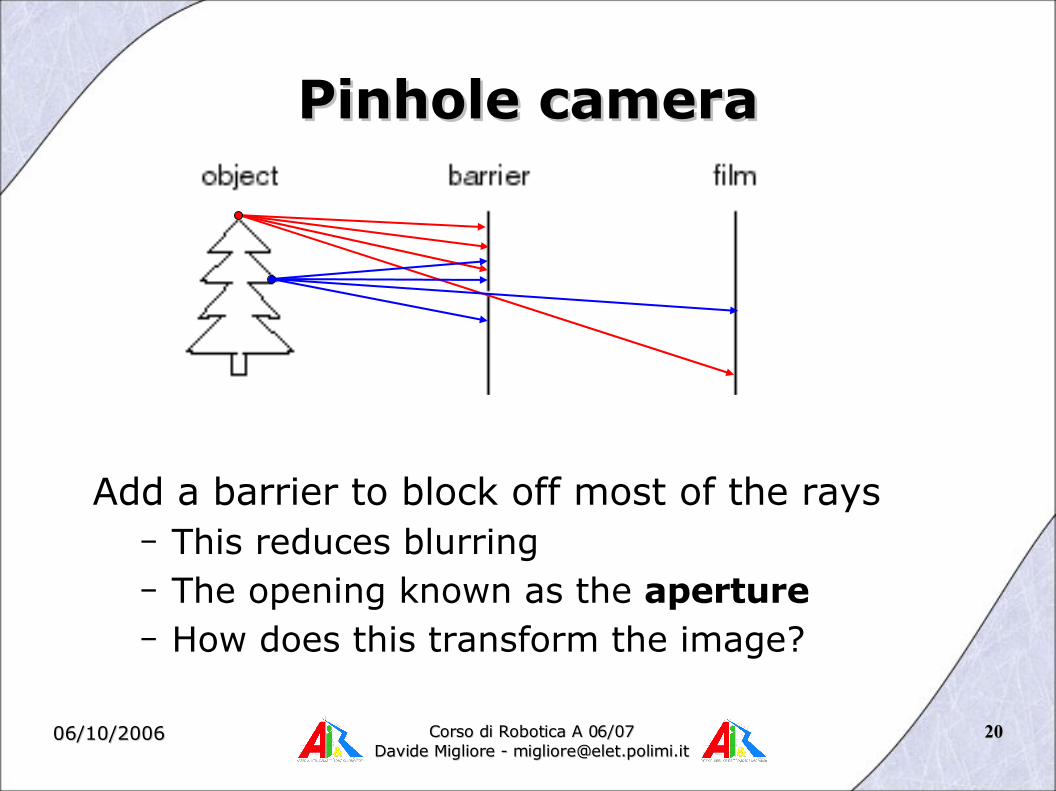
Pinhole cameraPinhole camera
Add a barrier to block off most of the rays– This reduces blurring– The opening known as the aperture– How does this transform the image?
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
2121
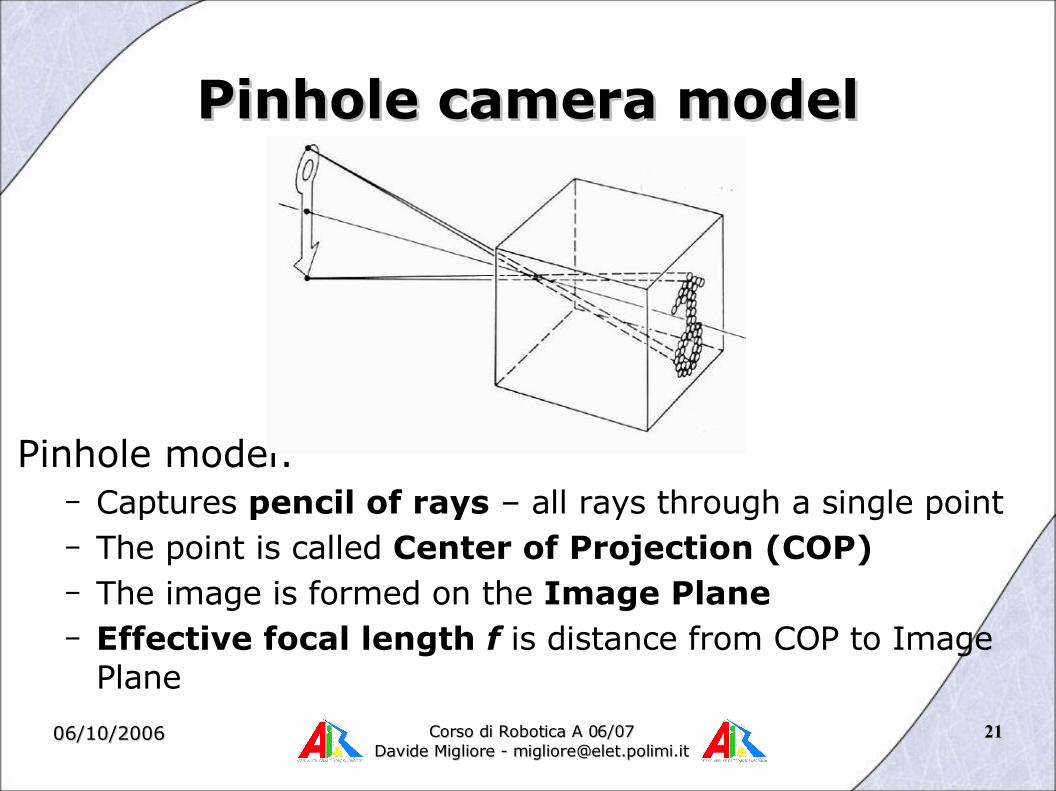
Pinhole camera modelPinhole camera model
Pinhole model:– Captures pencil of rays – all rays through a single point– The point is called Center of Projection (COP)– The image is formed on the Image Plane– Effective focal length f is distance from COP to Image
Plane
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
2222
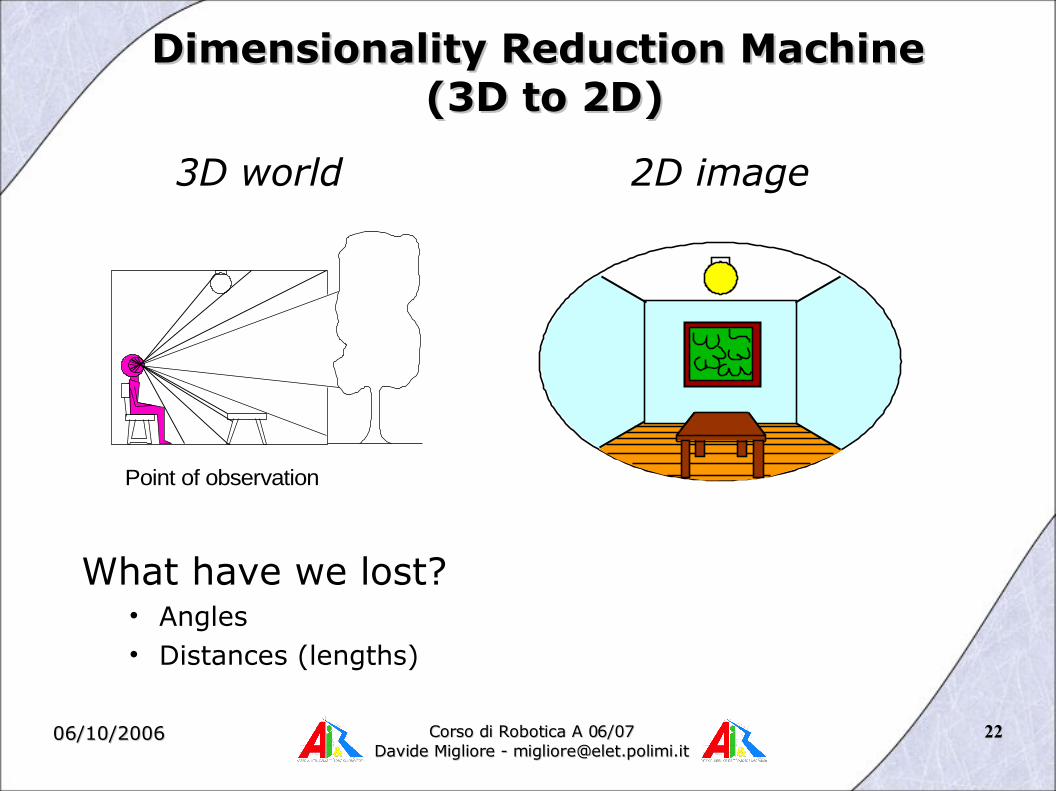
Dimensionality Reduction Machine Dimensionality Reduction Machine (3D to 2D)(3D to 2D)
Point of observation
3D world 2D image
What have we lost?• Angles• Distances (lengths)
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
2323
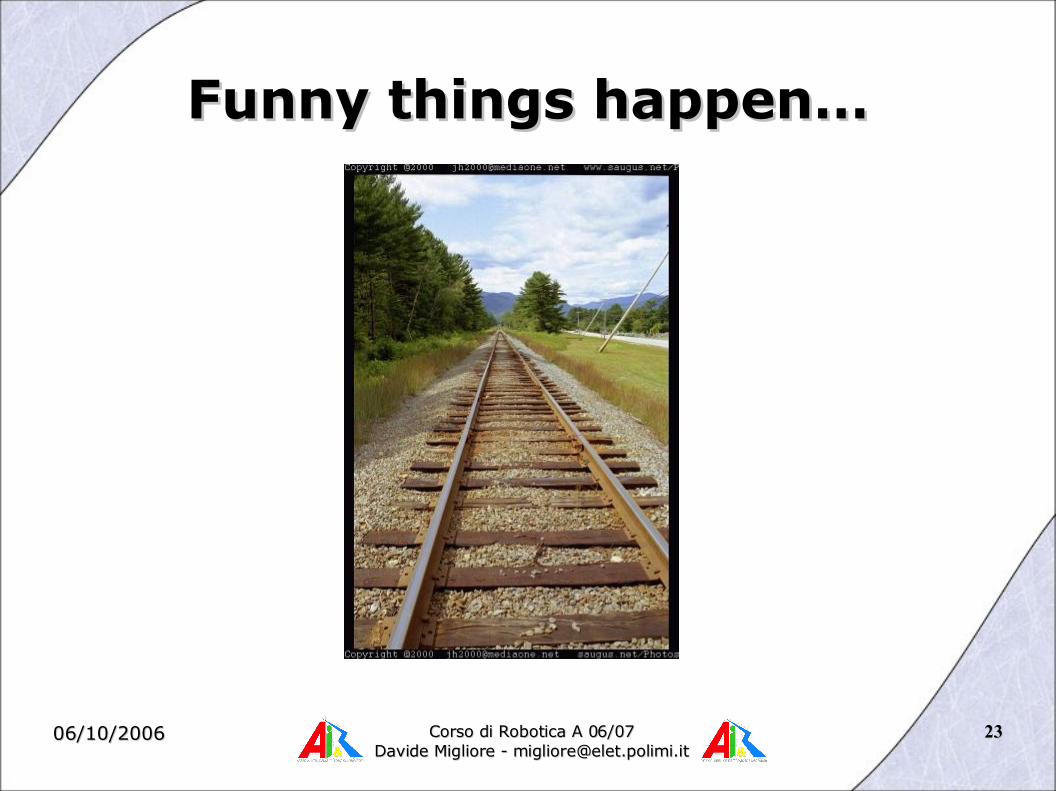
Funny things happen…Funny things happen…
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
2424
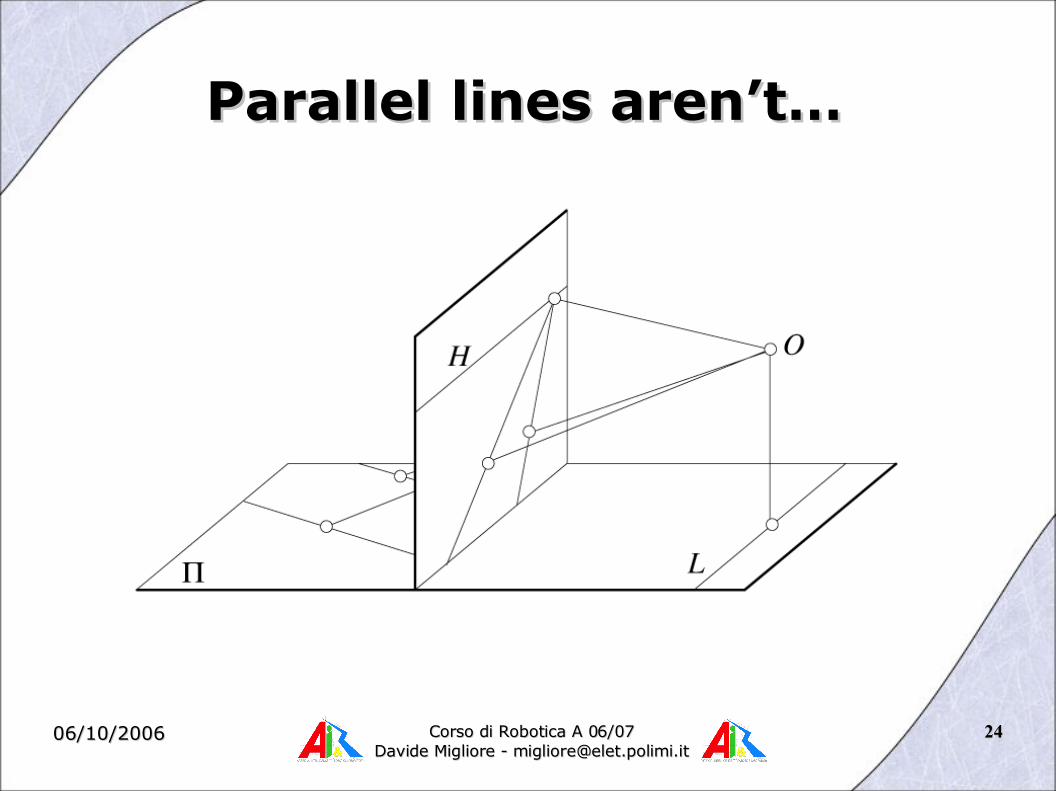
Parallel lines aren’t…Parallel lines aren’t…
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
2525
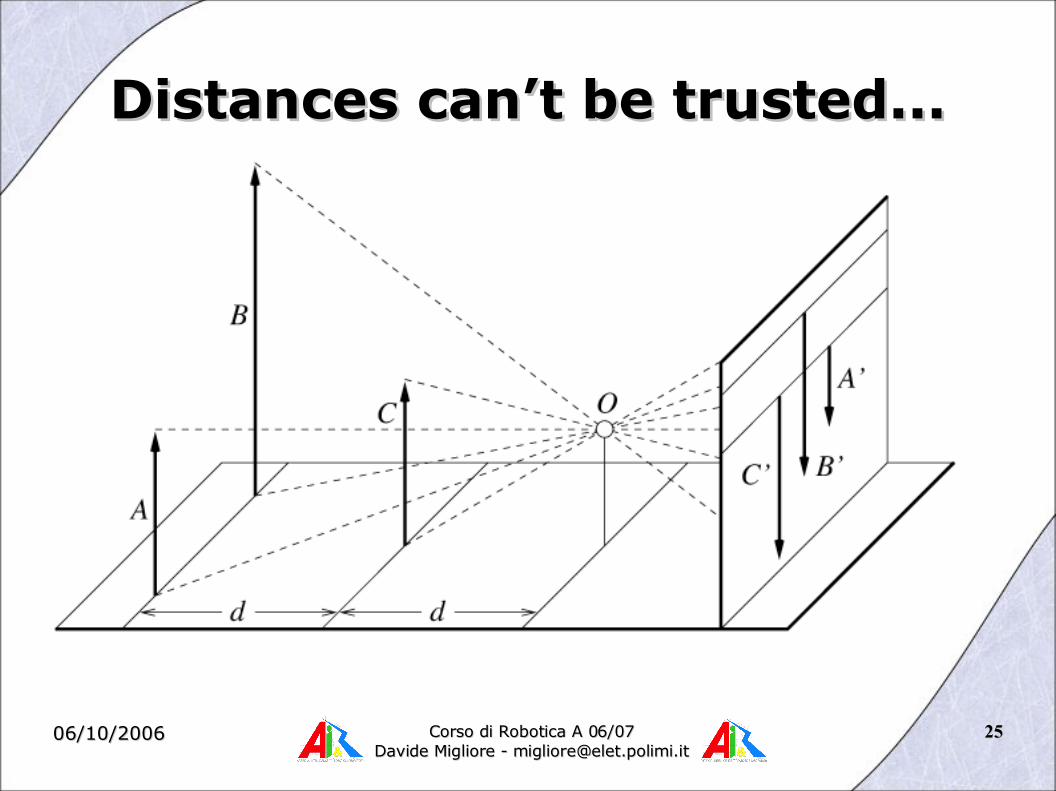
Distances can’t be trusted...Distances can’t be trusted...
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
2626
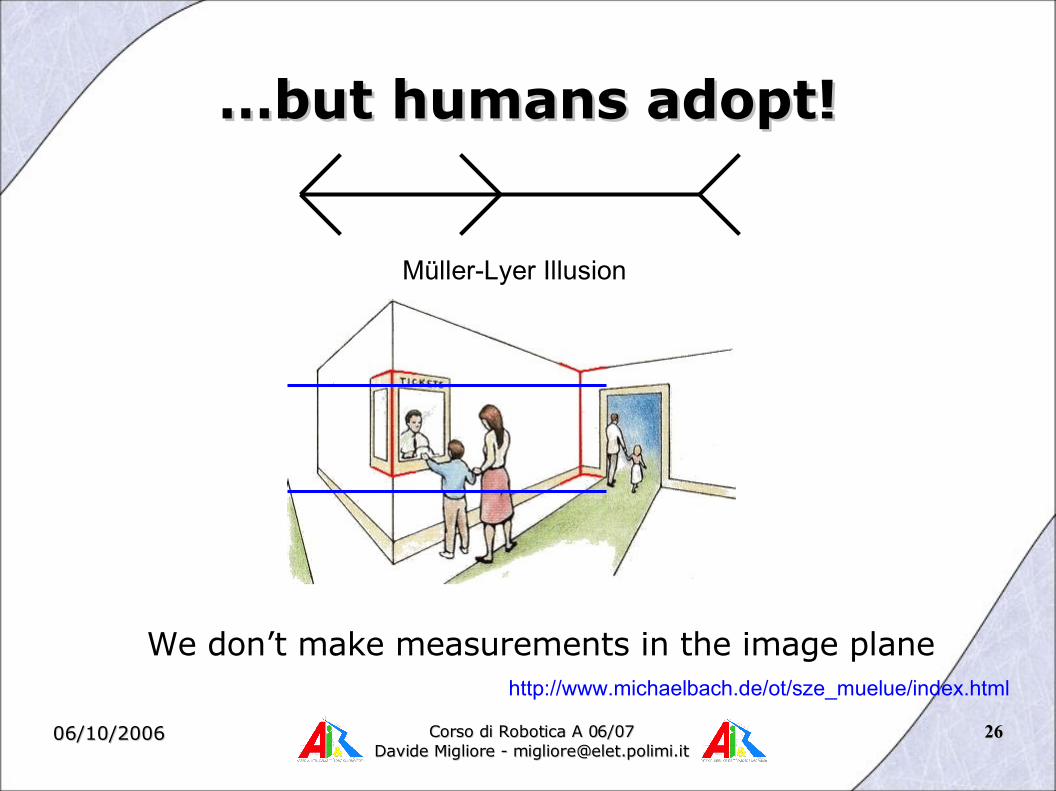
……but humans adopt!but humans adopt!
Müller-Lyer Illusion
http://www.michaelbach.de/ot/sze_muelue/index.html
We don’t make measurements in the image plane
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
2727
Building a real cameraBuilding a real camera
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
2828
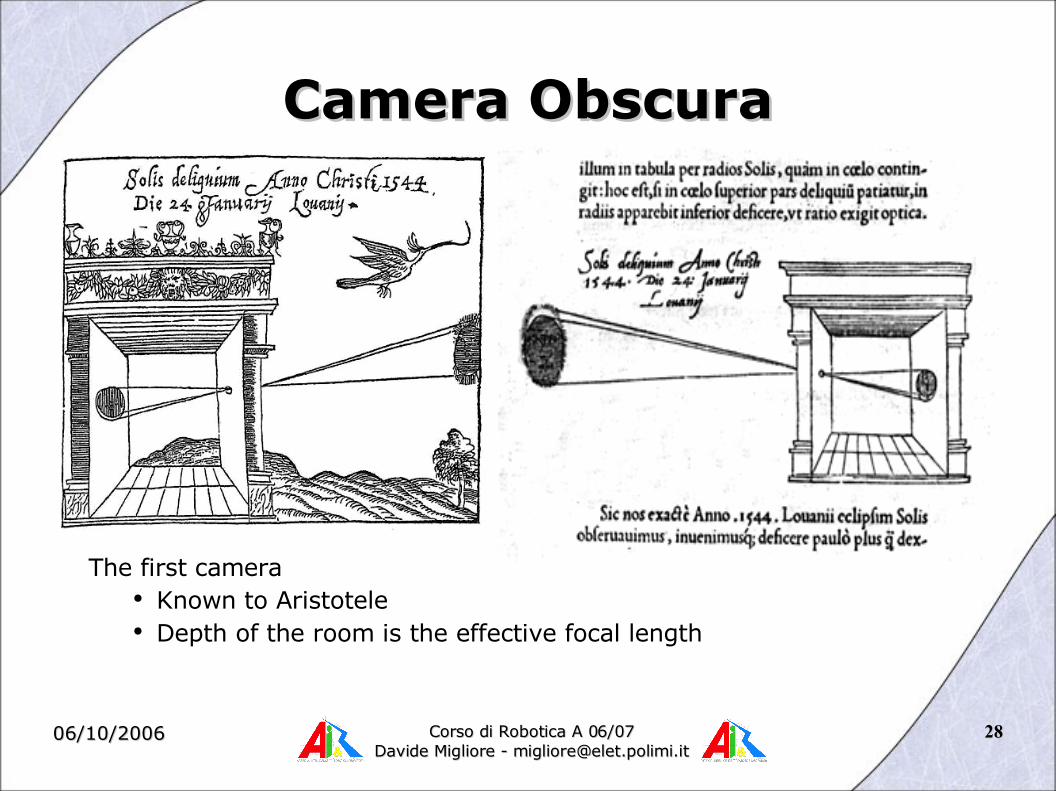
Camera ObscuraCamera Obscura
The first camera● Known to Aristotele● Depth of the room is the effective focal length
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
2929
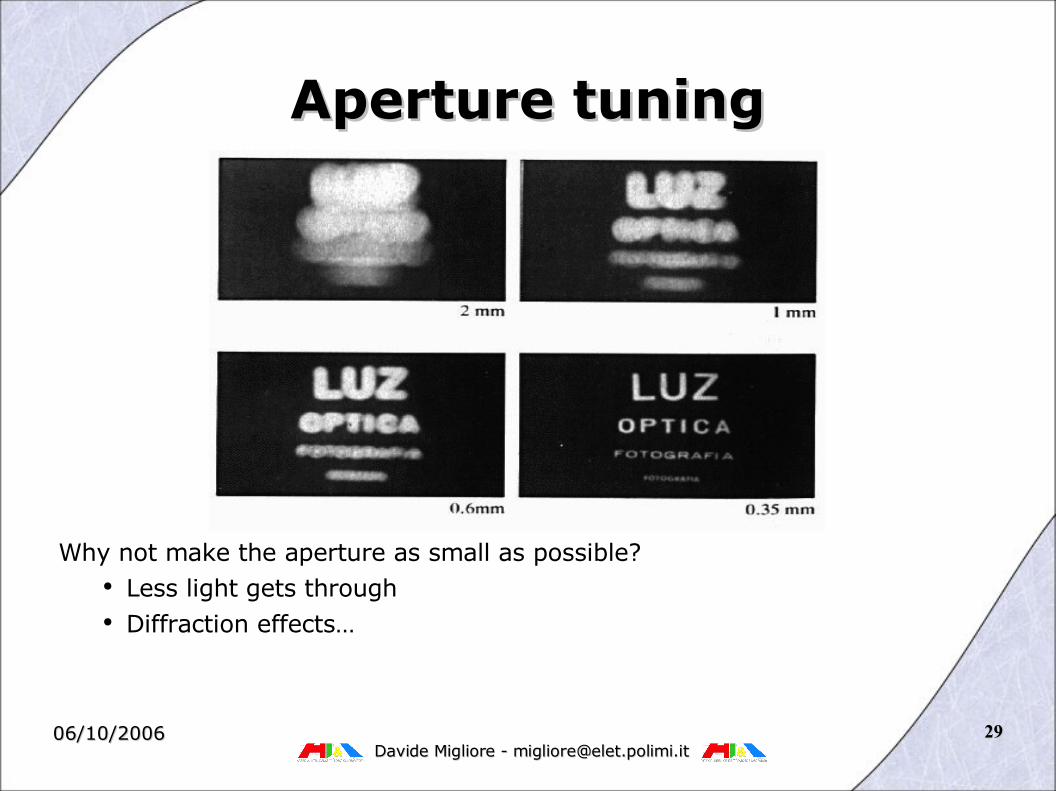
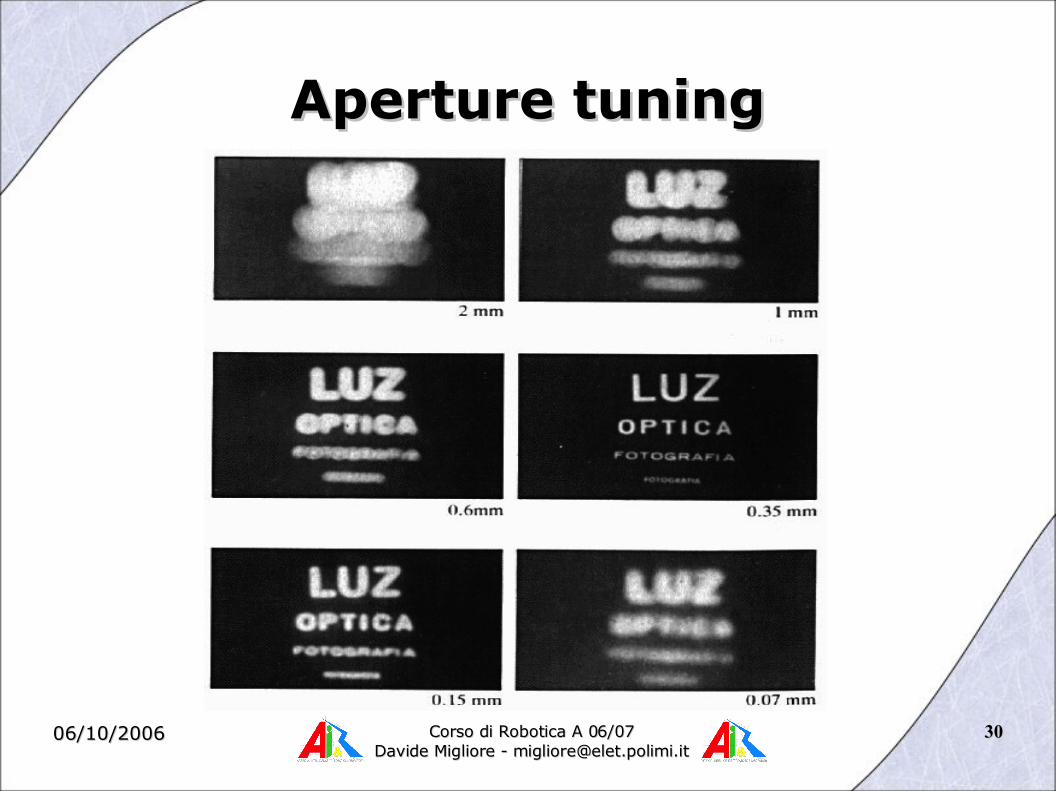
Aperture tuningAperture tuning
Why not make the aperture as small as possible?● Less light gets through● Diffraction effects…
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
3030
Aperture tuningAperture tuning
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
3131
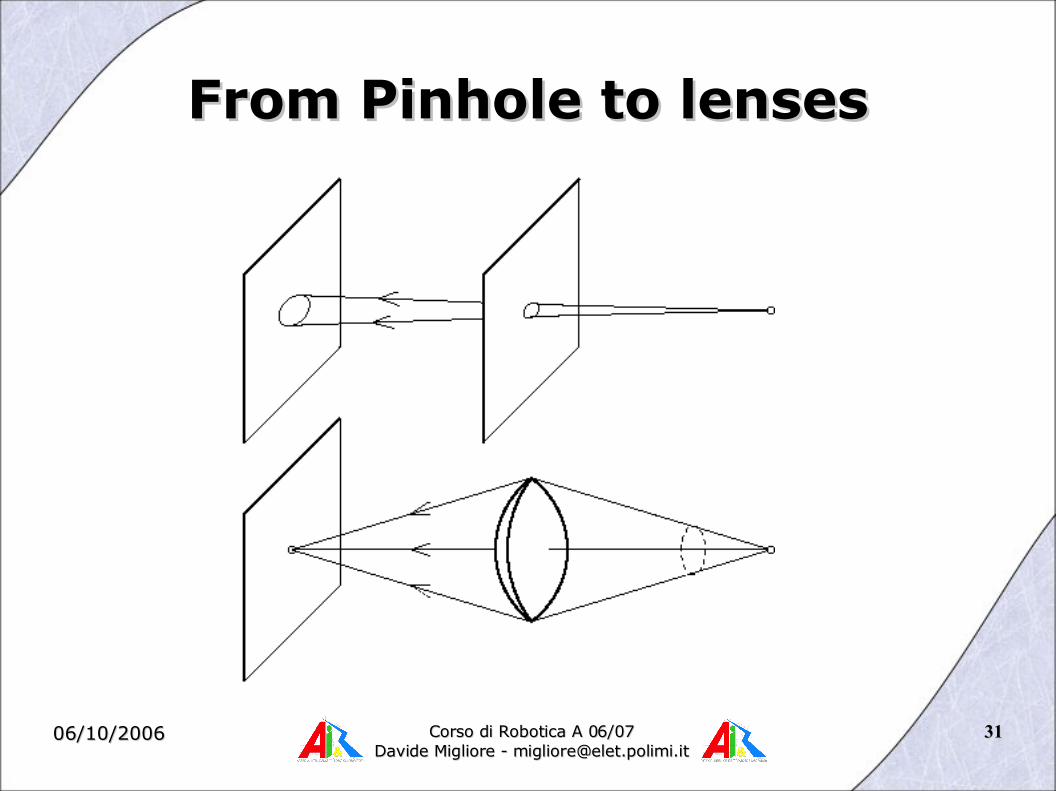
From Pinhole to lensesFrom Pinhole to lenses
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
3232
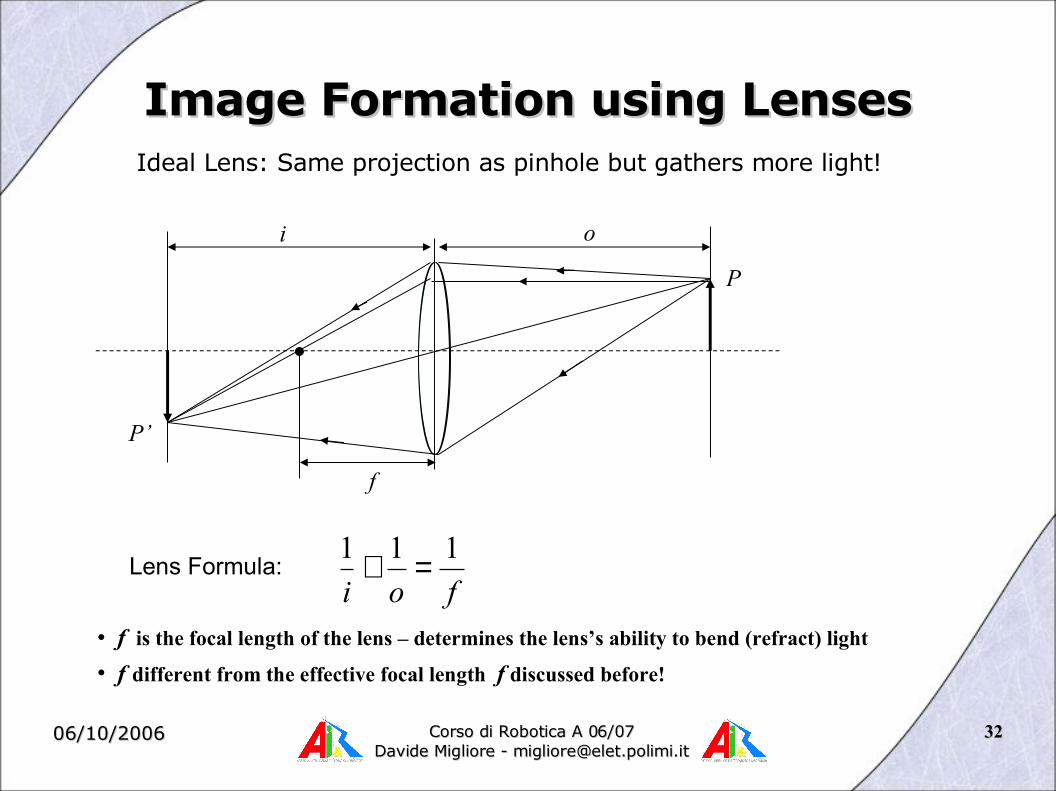
Image Formation using LensesImage Formation using LensesIdeal Lens: Same projection as pinhole but gathers more light!
foi
111 =+
i o
Lens Formula:
• f is the focal length of the lens – determines the lens’s ability to bend (refract) light
• f different from the effective focal length f discussed before!
P
P’
f
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
3333
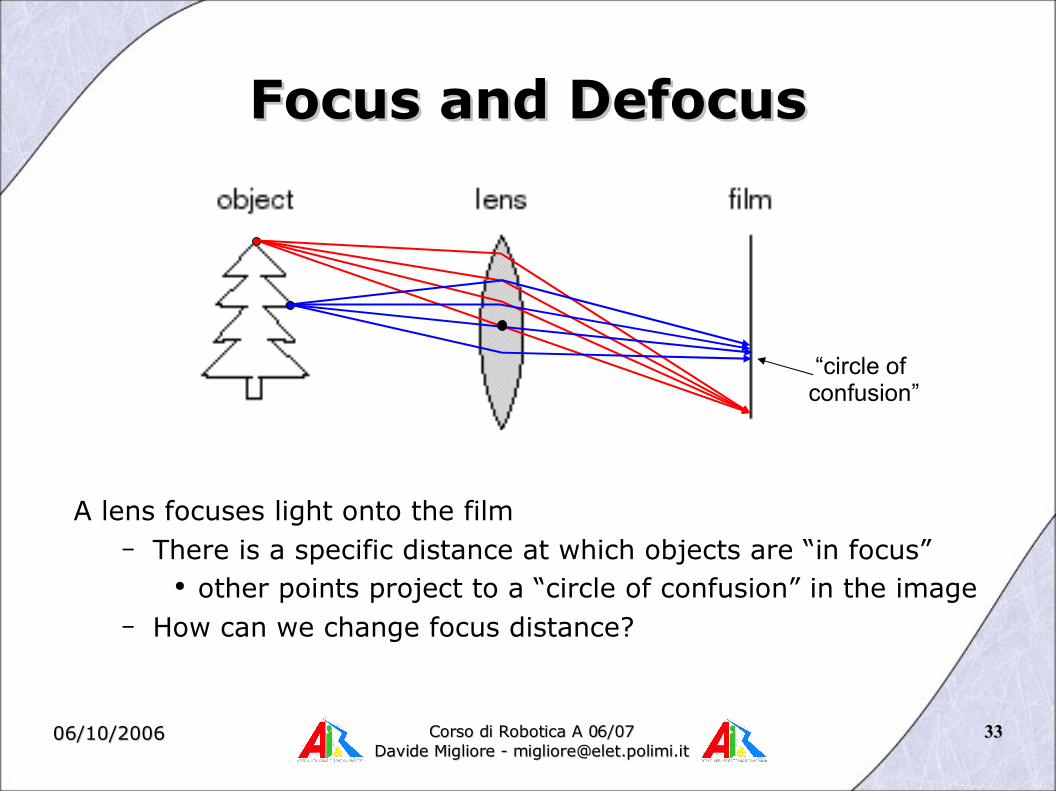
Focus and DefocusFocus and Defocus
A lens focuses light onto the film– There is a specific distance at which objects are “in focus”
● other points project to a “circle of confusion” in the image– How can we change focus distance?
“circle of confusion”
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
3434
Depth of FieldDepth of Field
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
3535
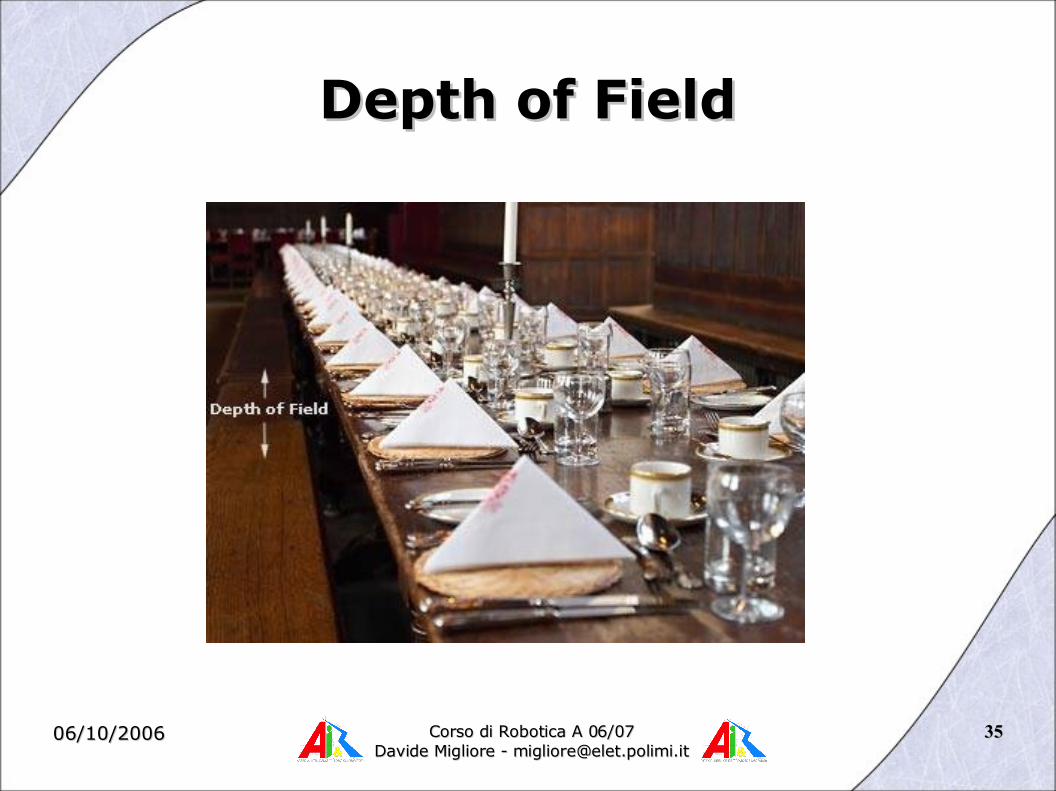
Depth of FieldDepth of Field
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
3636
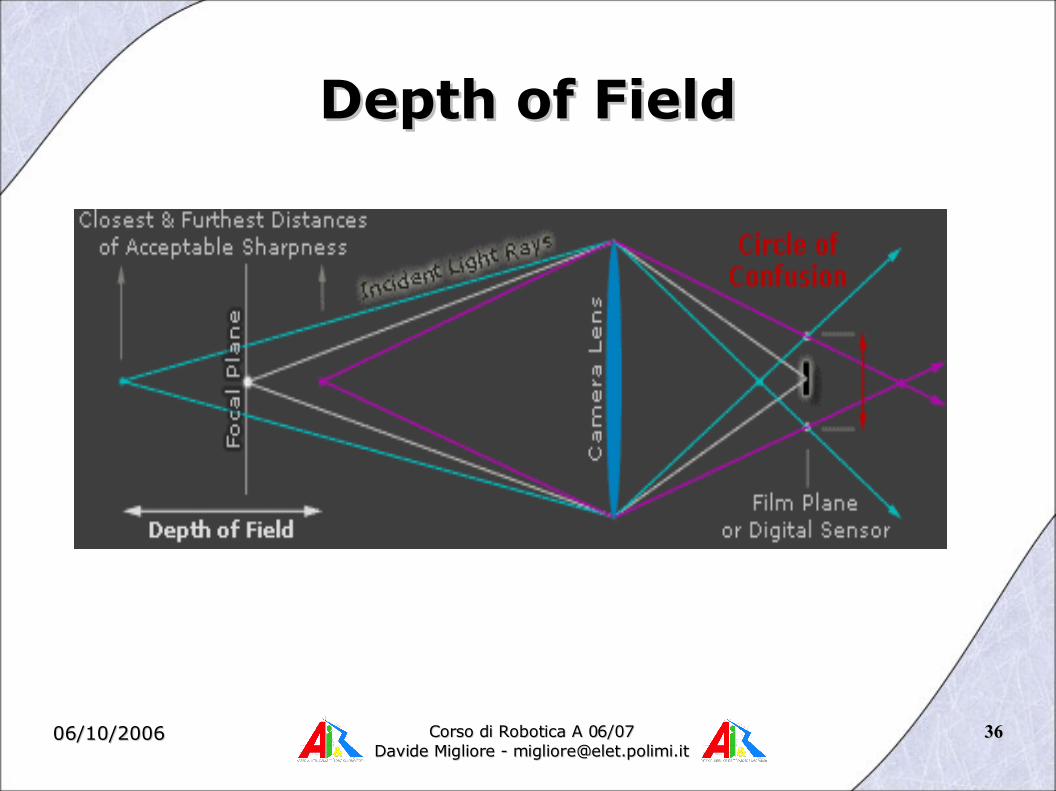
Depth of FieldDepth of Field
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
3737
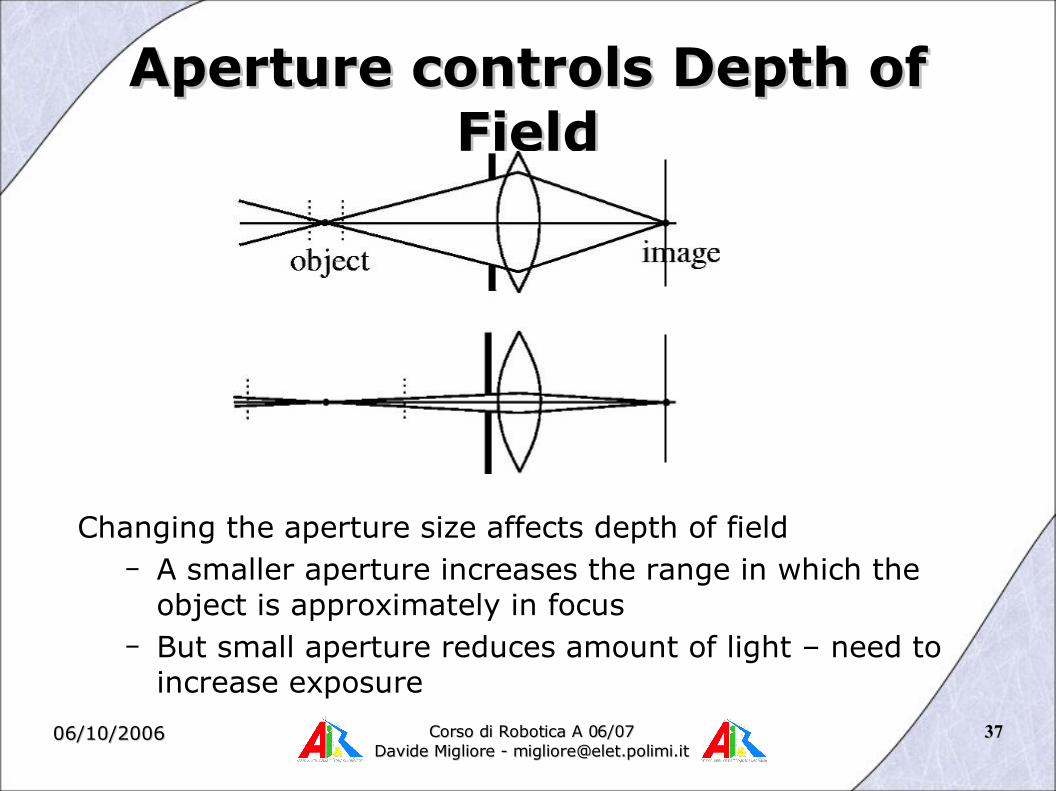
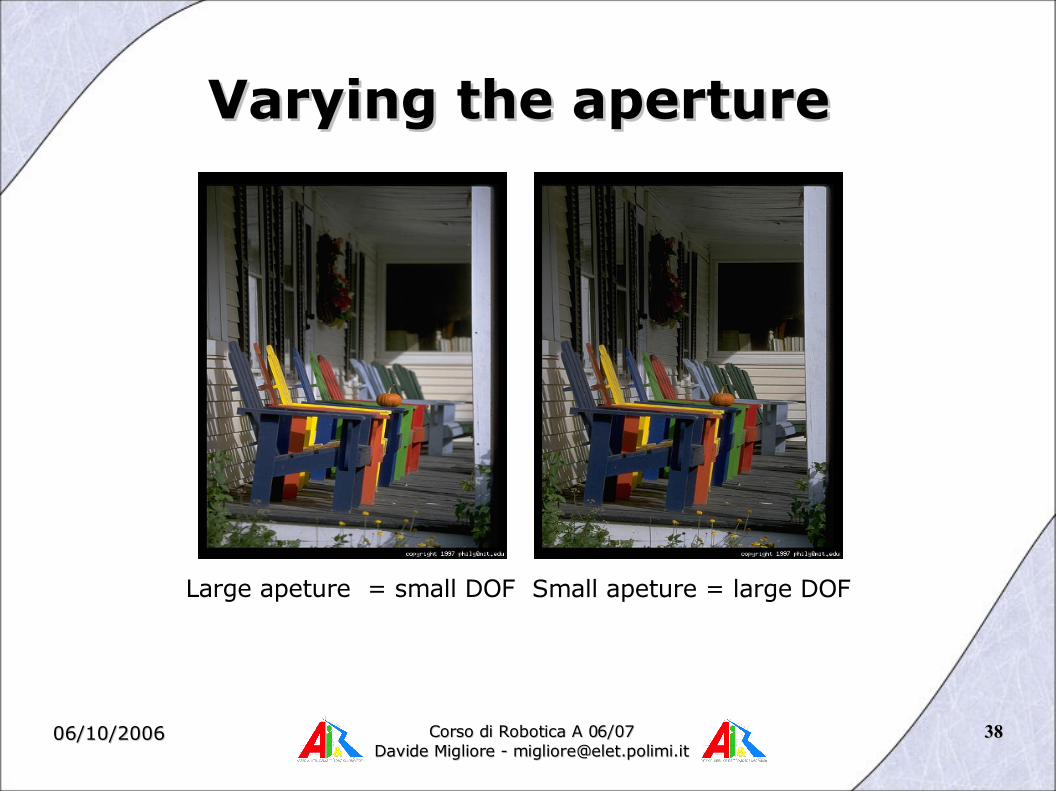
Aperture controls Depth of Aperture controls Depth of FieldField
Changing the aperture size affects depth of field– A smaller aperture increases the range in which the
object is approximately in focus– But small aperture reduces amount of light – need to
increase exposure
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
3838
Varying the aperture Varying the aperture
Large apeture = small DOF Small apeture = large DOF
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
3939
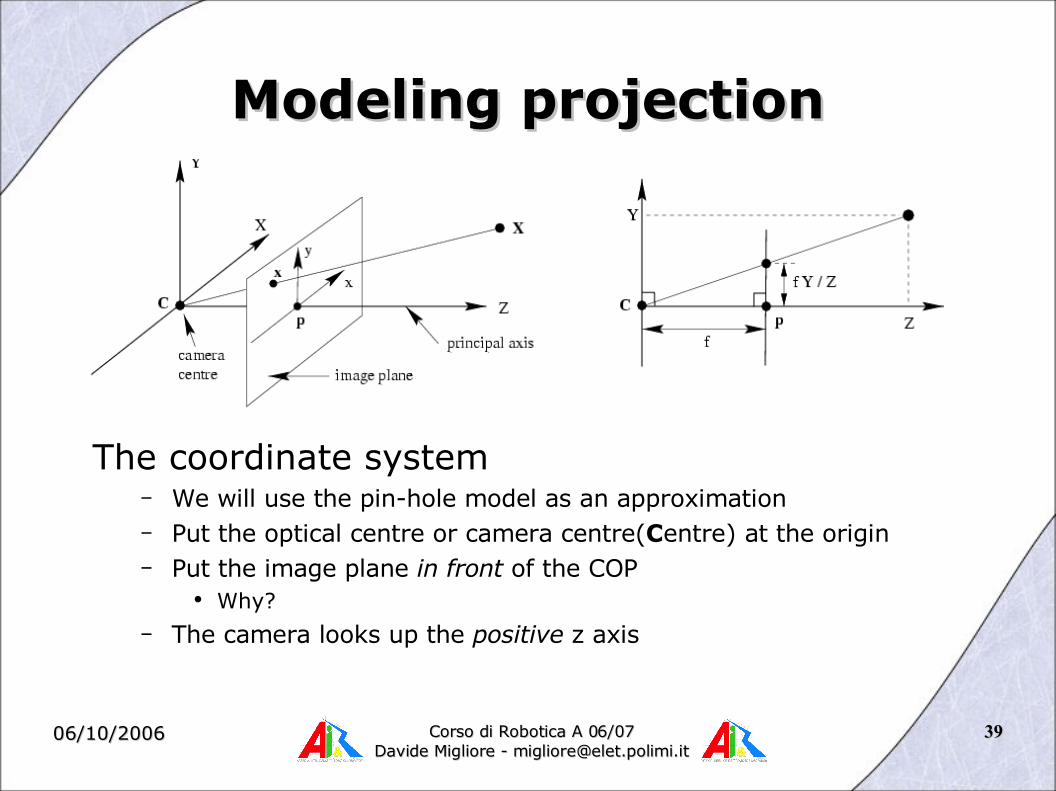
Modeling projectionModeling projection
The coordinate system– We will use the pin-hole model as an approximation– Put the optical centre or camera centre(Centre) at the origin– Put the image plane in front of the COP
● Why?– The camera looks up the positive z axis
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
4040
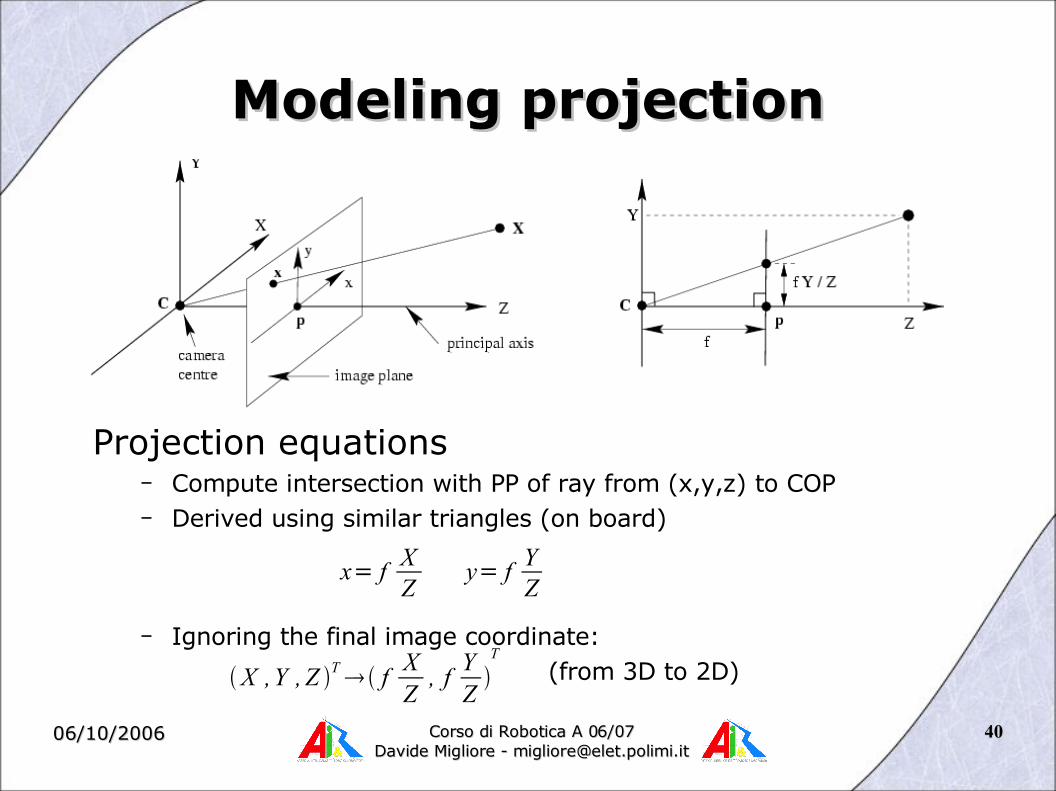
Modeling projectionModeling projection
Projection equations– Compute intersection with PP of ray from (x,y,z) to COP– Derived using similar triangles (on board)
– Ignoring the final image coordinate: (from 3D to 2D)
x= f XZ
y= f YZ
X ,Y , Z T f XZ, fYZT
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
4141
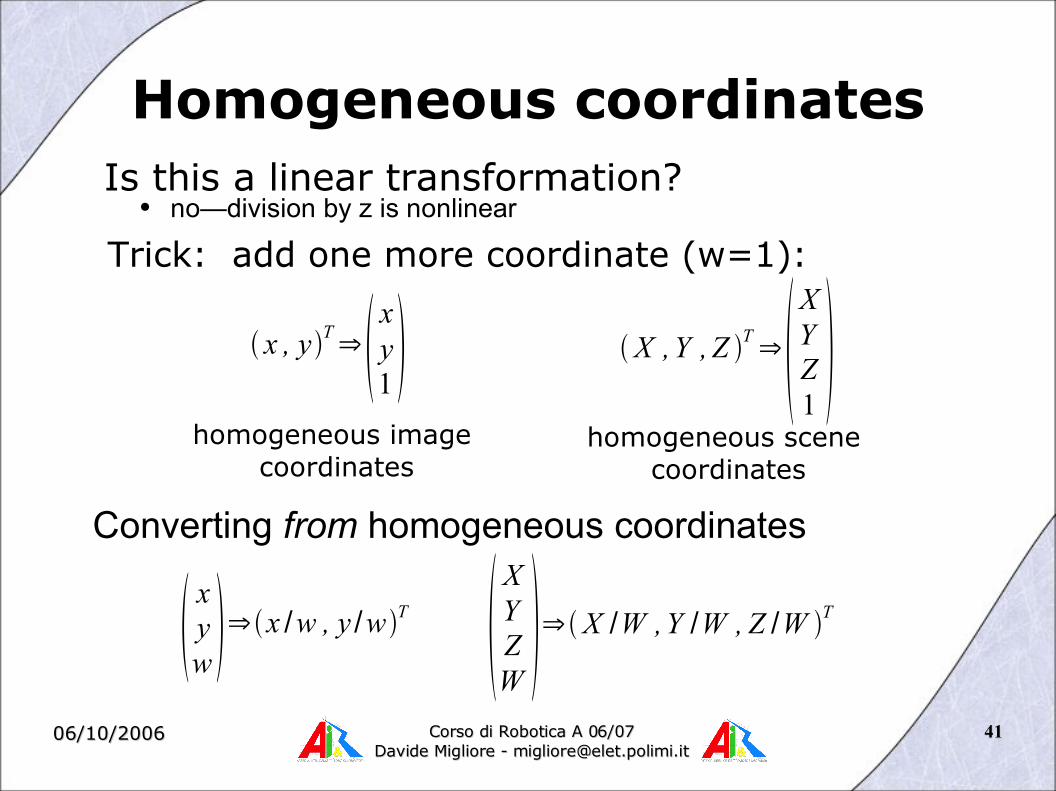
Homogeneous coordinatesIs this a linear transformation?
Trick: add one more coordinate (w=1):
homogeneous image coordinates
homogeneous scene coordinates
Converting from homogeneous coordinates
● no—division by z is nonlinear
x , yT⇒ xy1 X ,Y , Z T⇒XYZ1
xyw ⇒x /w , y /wT XYZW
⇒X /W ,Y /W , Z /W T
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
4242
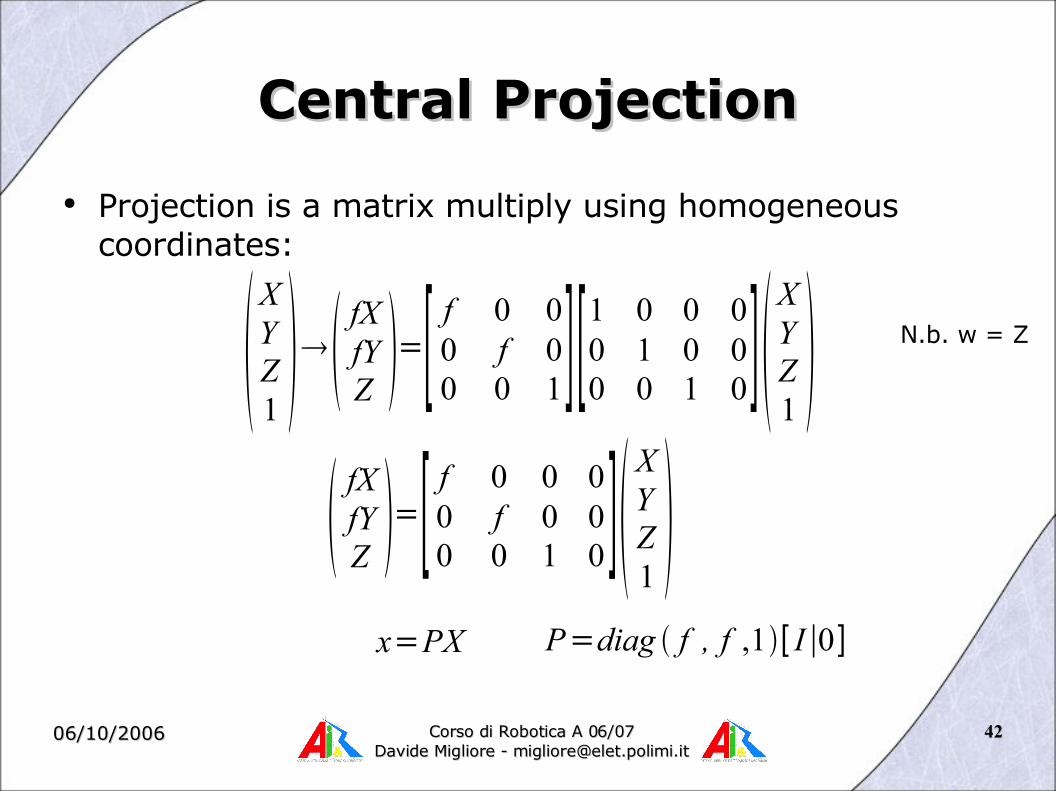
Central ProjectionCentral Projection
● Projection is a matrix multiply using homogeneous coordinates:
N.b. w = ZXYZ1 fXfYZ =[ f 0 0
0 f 00 0 1][1 0 0 0
0 1 0 00 0 1 0]XYZ
1
fXfYZ =[ f 0 0 00 f 0 00 0 1 0 ] XYZ
1
x=PX P=diag f , f ,1[ I∣0]
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
4343
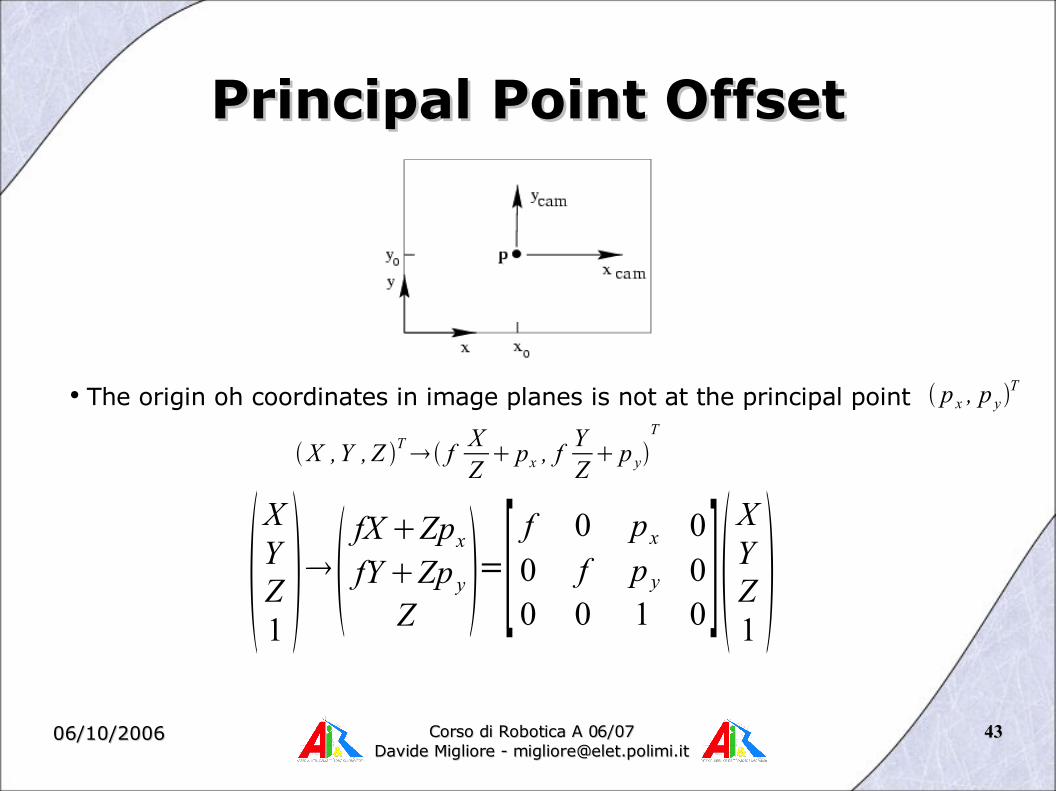
Principal Point OffsetPrincipal Point Offset
X ,Y , Z T f XZ px , f
YZ p y
T
● The origin oh coordinates in image planes is not at the principal point p x , p yT
XYZ1 fXZpx
fYZp yZ =[ f 0 px 0
0 f p y 00 0 1 0 ] XYZ1
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
4444
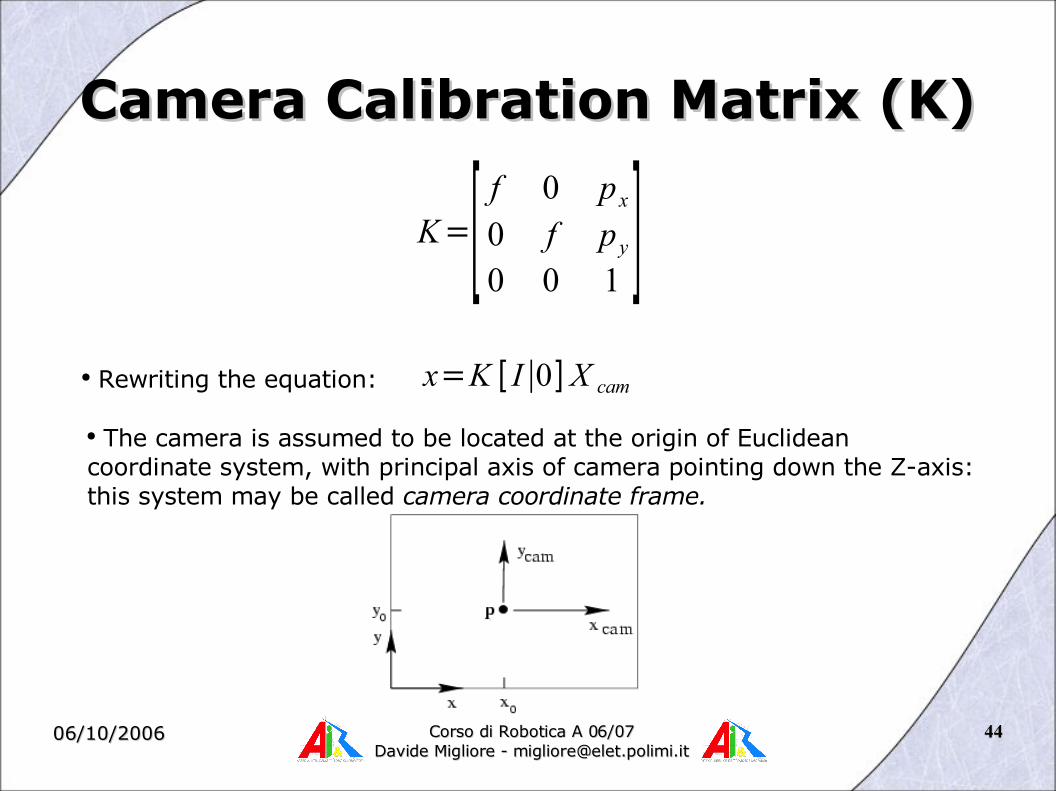
Camera Calibration Matrix (K)Camera Calibration Matrix (K)
K=[ f 0 px0 f py0 0 1 ]
x=K [ I∣0] X cam● Rewriting the equation:
● The camera is assumed to be located at the origin of Euclidean coordinate system, with principal axis of camera pointing down the Z-axis: this system may be called camera coordinate frame.
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
4545
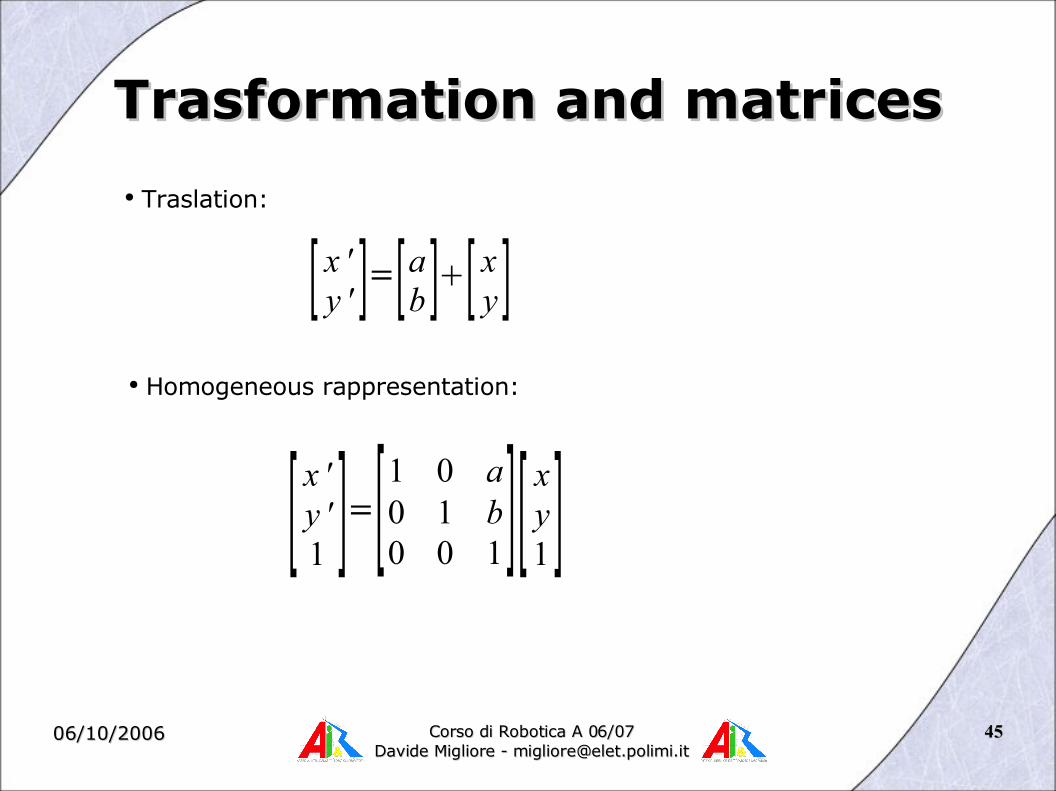
Trasformation and matricesTrasformation and matrices
[ x 'y ' ]=[ab ][ xy ]● Traslation:
● Homogeneous rappresentation:
[ x 'y '1 ]=[1 0 a0 1 b0 0 1][ xy1 ]
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
4646
Trasformation and matricesTrasformation and matrices
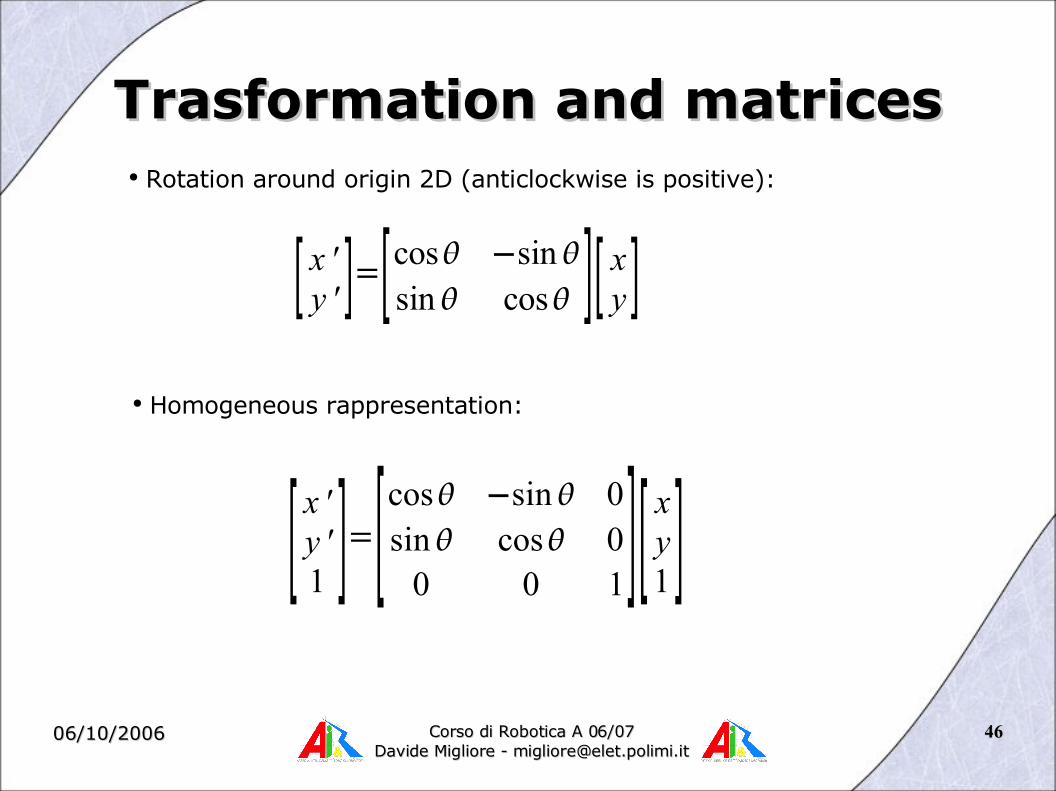
[ x 'y ' ]=[cos −sinsin cos ][ xy ]
● Rotation around origin 2D (anticlockwise is positive):
● Homogeneous rappresentation:
[ x 'y '1 ]=[cos −sin 0sin cos 00 0 1][ xy1 ]
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
4747
Trasformation and matricesTrasformation and matrices
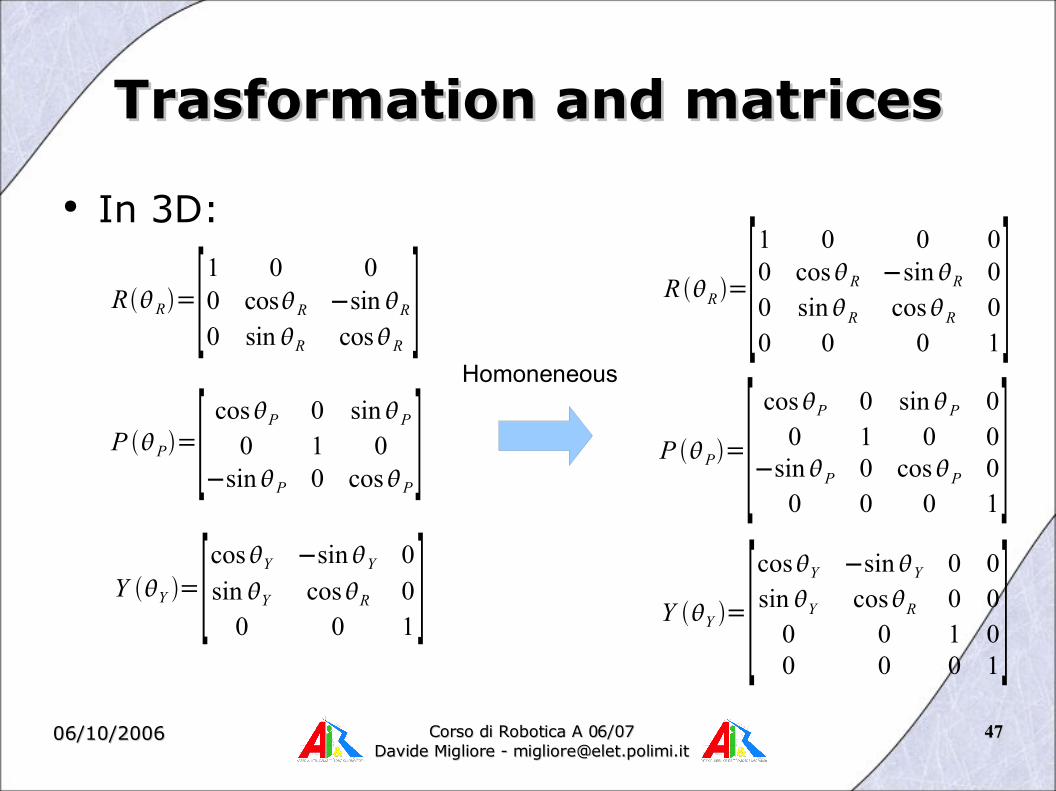
● In 3D:
RR=[1 0 00 cosR −sin R0 sin R cosR ]
P P=[ cosP 0 sinP0 1 0
−sinP 0 cosP]Y Y =[cosY −sinY 0
sin Y cosR 00 0 1 ]
Homoneneous
R R=[1 0 0 00 cosR −sinR 00 sinR cosR 00 0 0 1
]P P=[ cosP 0 sinP 0
0 1 0 0−sinP 0 cosP 00 0 0 1
]Y Y =[cosY −sinY 0 0
sin Y cosR 0 00 0 1 00 0 0 1
]
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
4848
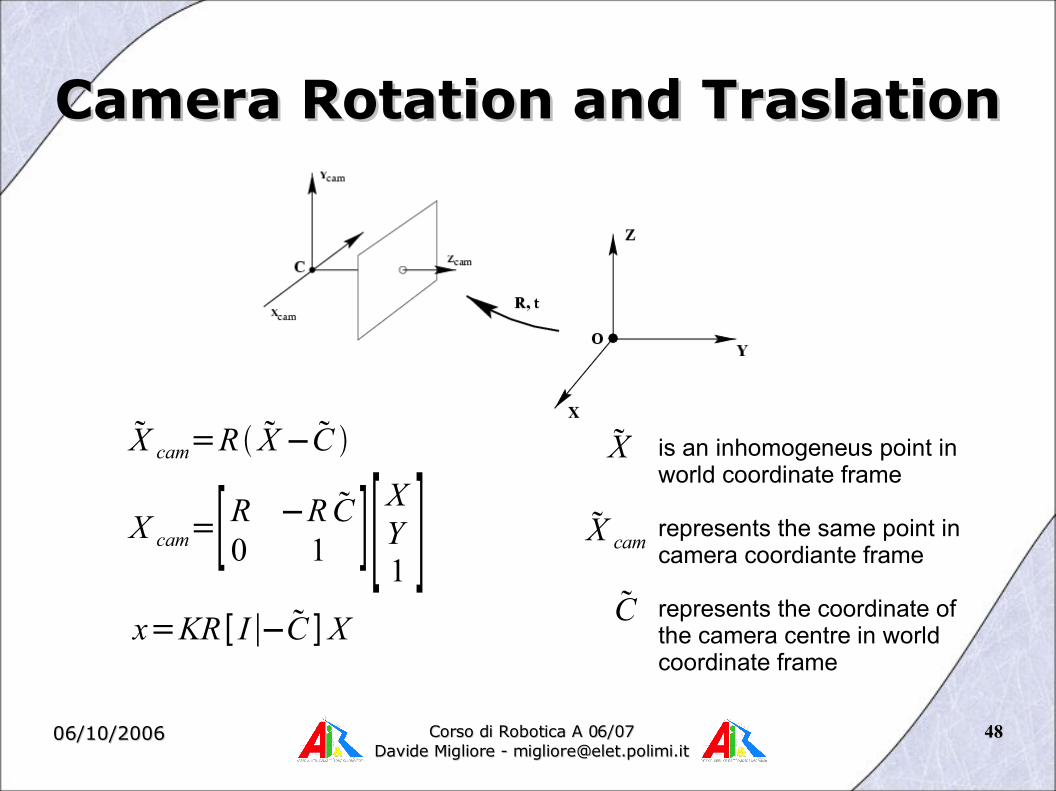
Camera Rotation and TraslationCamera Rotation and Traslation
X cam=R X− C is an inhomogeneus point in world coordinate frame
represents the same point in camera coordiante frame
represents the coordinate of the camera centre in world coordinate frame
X cam=[R −R C0 1 ][ XY1 ]
x=KR [ I∣− C ] X
X
X cam
C
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
4949
Camera Rotation and TraslationCamera Rotation and Traslation
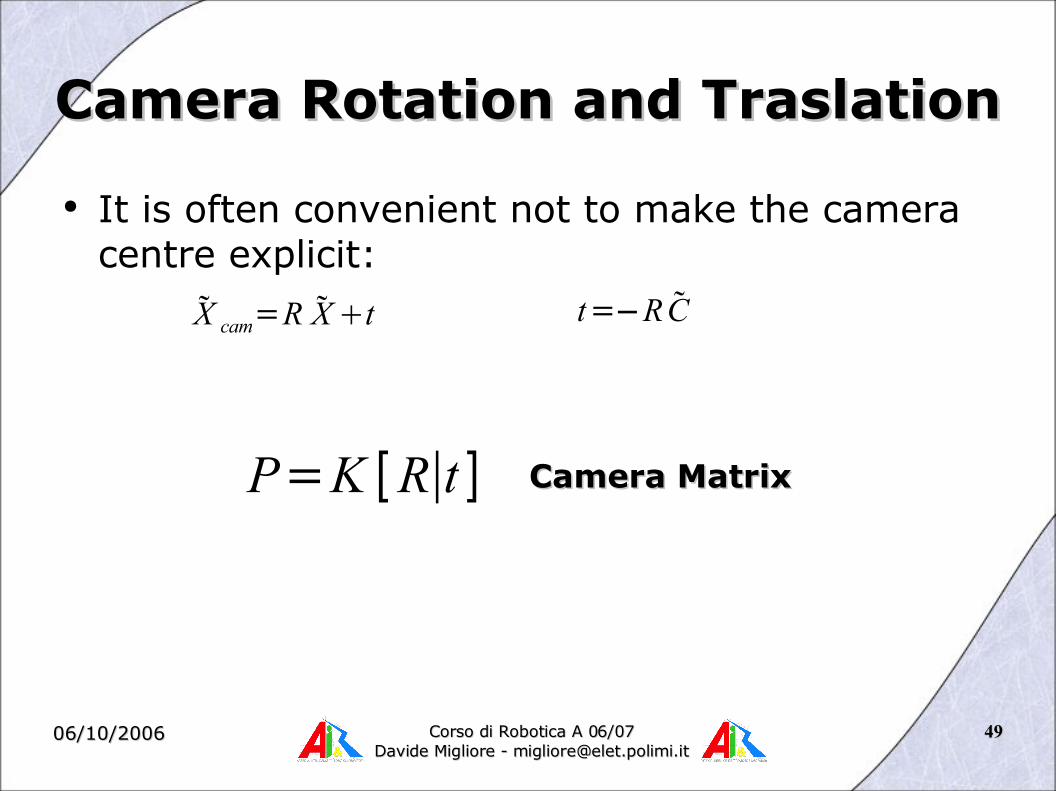
● It is often convenient not to make the camera centre explicit:
X cam=R Xt t=−R C
P=K [R∣t ] Camera MatrixCamera Matrix
06/10/200606/10/2006 Corso di Robotica A 06/07Corso di Robotica A 06/07Davide Migliore - [email protected] Migliore - [email protected]
5050
End of first lesson
● Any question?






























