Embed Size (px)
Citation preview

Robotics: Tutorial 3Mechatronics Engineering
Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarekand Eng. Abdelrahman Ezz
German University in CairoFaculty of Engineering and Material Science
October 4, 2016
Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz Robotics: Tutorial 3 1 / 33

Inverse Position Kinematics
Introducing one of the methods available to solve inverseposition kinematics level.
Using one of the most important numerical methods, NewtonRaphson.
It depends on finding a numerical solution of a non-linearequation(s) instead of evaluating the closed form solution.
Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz Robotics: Tutorial 3 2 / 33

Newton Raphson - Graphical Approach
Now, For the shown non-linear function:
Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz Robotics: Tutorial 3 3 / 33

Starting from Any initial guess,we evaluate the function F (x0) atx0.
Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz Robotics: Tutorial 3 4 / 33

Then get the slope F (x0), which when intersect the x-axis, produce(in most cases) a point closer to the rest of the function.
Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz Robotics: Tutorial 3 5 / 33

This is done in several iteration.
Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz Robotics: Tutorial 3 6 / 33

until it converge to the acceptable error value.
Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz Robotics: Tutorial 3 7 / 33

Problems of Newton Raphson
Function diverge away from the root by choosing the wronginitial solution.
Slope = zero at initial solution chosen.
Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz Robotics: Tutorial 3 8 / 33

Newton Raphson - Mathematical Approach
Let’s take a look at the mathematics behind this: at the initialguess point (x0)), the first derivative equation, which is the slopeas well:
slope =∆y
∆x=
F (x0)− 0
x0 − x1(1)
F (x0)[x0 − x1] = F (x0) (2)
x0 − x1 =F (x0)
F (x0)(3)
which can be written as:(this is for a single iteration, starting aninitial guess).
x1 = x0 − [F (x0)]−1F (x0)] (4)
In General Form:
xn+1 = xn − [F (xn)]−1F (xn)] (5)
where, n is number of current iteration.Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz Robotics: Tutorial 3 9 / 33

Application of Newton Raphson in Robotics
We will expand this same formula for our application, inrobotics,by changing equation from scalar into matrix and mainlyto be used in the inverse position kinematics problem, where wesearch for the values of (q) joint angles that will make end effectorreach desired goal. Thus,
qn+1 = qn − [∂F
∂q]−1|q=qnF (qn) (6)
Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz Robotics: Tutorial 3 10 / 33
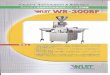
Example 1
For the shown 2 DOF planar robot, Derive the inverse positionlevel Kinematics equations:
Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz Robotics: Tutorial 3 11 / 33

Solution
From the forward kinematics (previous tutorial):
x = l1cos(q1) + l2cos(q2) (7)
l1cos(q1) + l2cos(q2)− x = 0→ (f1) (8)
y = l1sin(q1) + l2sin(q2) (9)
l1sin(q1) + l2sin(q2)− y = 0→ (f2) (10)
Relation between joints (q) and position (x) is nonlinear.Therefore, for the inverse kinematics solution, Newton Raphsontechnique is used:We’ll be searching for the values of q1,q2 that satisfy thesefunction, and accordingly end-effector reach its destination:[
q1q2
]1︸ ︷︷ ︸
values afterone iteration
=
[q1q2
]0︸ ︷︷ ︸
initial values
−
[∂F1∂q1
∂F1∂q2
∂F2∂q1
∂F2∂q2
]−1 [f1(q1, q2)0f2(q1, q2)0
](11)
Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz Robotics: Tutorial 3 12 / 33

Evaluation of different elements of equation (11) and Substitution:[q1
q2
]1
=
[q1
q2
]0
−[−l1sin(q1) −l2sin(q2)
l1cos(q1) l2cos(q2)
] ∣∣∣∣−1
q1=q10,q2=q20
[l1cos(q10)+l2cos(q20)−x
l1sin(q10)+l2sin(q20)−y
](12)
This produce values of q1, q2 after 1 iteration, and then thisprocess is repeated for several iterations, in which their valuesconverge to the acceptable values to satisfy the equations f1, f2and these values become the solution of the inverse position levelkinematics.
Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz Robotics: Tutorial 3 13 / 33

Inverse Velocity Kinematics
Relation between end effector velocities vector and Joints velocitiesvector is linear, and we can get q1 and q2 from position kinematics.The solution is:
q = J−1(q)X (13)
q → Joints velocities vector.
J−1(q) → Inverse of Jacobian Matrix.can be calculated using MATLAB.
x → end effector velocities vector.
Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz Robotics: Tutorial 3 14 / 33

Inverse Acceleration Kinematics
Relation between end effector acceleration vector and Jointsacceleration vector is Affine (Linear relation with a shift) and wecan get q1 and q2 from velocity kinematics.
q = J−1(q)[X − J(q)q] (14)
q → Joints acceleration vector.
J−1(q) → Inverse of Jacobian Matrix.can be calculated using MATLAB.
X → end effector acceleration vector.
J(q) → rate of change of Jacobian matrix.
q → joints velocities vector.
Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz Robotics: Tutorial 3 15 / 33

Example 2
For the shown 3 DOF non-planar robot, Derive the equations forposition, velocity and acceleration level Kinematics equations(Forward and inverse):
Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz Robotics: Tutorial 3 16 / 33

The Forward Position Level Kinematic
First Step: Assign the frames: Newtonian Frame and local framesat each joint.
Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz Robotics: Tutorial 3 17 / 33
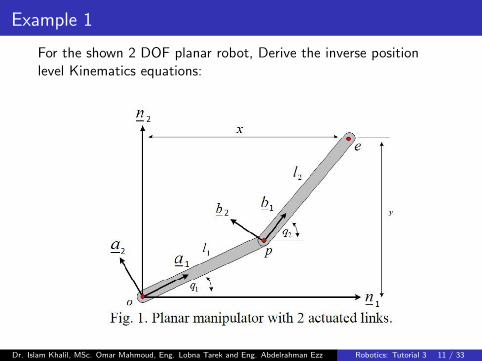
Second Step: Write Down the loop equations moving from Origin(O) to the end-effector (E):
|rOE = x |n1 + y |n2 + z |n3 (15)
|rOE = l1|a3 + l2|b2 + l3|b3 (16)
Third Step: Derive the rotation matrices:
|n1 |n2 |n3|a1 cos(q1) sin(q1) 0
|a2 −sin(q1) cos(q1) 0
|a3 0 0 1
b2 parallel to a2
|a1 |a2 |a3|b1 cos(q2) 0 sin(q2)
|b2 0 1 0
|b3 −sin(q2) 0 cos(q2)
Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz Robotics: Tutorial 3 18 / 33

where,|a1 = cos(q1)|n1 + sin(q1)|n2 (17)
|a2 = −sin(q1)|n1 + cos(q1)|n2 (18)
|a3 = |n3 (19)
For second frame, (with respect to first frame)
|b1 = cos(q2)|a1 + sin(q2)|a3 (20)
|b2 = |a2 (21)
|b3 = −sin(q2)|a1 + cos(q2)|a3 (22)
(with respect to Newtonian frame),From equation (18) and (21):
|b2 = −sin(q1)|n1 + cos(q1)|n2 (23)
From equation (17),(19) and (22):
|b3 = −sin(q2)cos(q1)|n1 − sin(q2)sin(q1)|n2 + cos(q2)|n3 (24)
Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz Robotics: Tutorial 3 19 / 33

Substituting equations (19),(23) and (24) in (15), and equatingboth sides of the equation (15) and (16):
|rOE = l1|n3 − l2sin(q1)|n1 + l2cos(q1)|n2− l3sin(q2)cos(q1)|n1 − l3sin(q2)sin(q1)|n2 + l3cos(q2)|n3 (25)
x |n1 + y |n2 + z |n3 = l1|n3 − l2sin(q1)|n1 + l2cos(q1)|n2− l3sin(q2)cos(q1)|n1 − l3sin(q2)sin(q1)|n2 + l3cos(q2)|n3 (26)
Taking common factors for the right side of the equation:
x |n1 + y |n2 + z |n3 = (−l2sin(q1)− l3sin(q2)cos(q1))|n1+
(l2cos(q1)− l3sin(q2)sin(q1))|n2 + (l1 + l3cos(q2))|n3 (27)
Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz Robotics: Tutorial 3 20 / 33
Forward Position level Kinematics
In matrix form, so that X = f (q): xyz
=
−l2sin(q1)− l3sin(q2)cos(q1)l2cos(q1)− l3sin(q2)sin(q1)
l1 + l3cos(q2)
(28)
Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz Robotics: Tutorial 3 21 / 33

Inverse Position Level Kinematic
Using the Newton Raphson technique:
q1q2l3
n+1
=
q1q2l3
n
−
∂F1∂q1
∂F1∂q2
∂F1∂l3
∂F2∂q1
∂F2∂q2
∂F2∂l3
∂F3∂q1
∂F3∂q2
∂F3∂l3
−1
q1=q1nq2=q2nL3=L3n
f1(q1, q2, l3)nf2(q1, q2, l3)nf3(q1, q2, l3)n
(29)and the functions are (from forward kinematics):−l2sin(q1)− l3sin(q2)cos(q1)− x = 0→ (f1)l2cos(q1)− l3sin(q2)sin(q1)− y = 0→ (f2)l1 + l3cos(q2)− z = 0→ (f3)
Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz Robotics: Tutorial 3 22 / 33

By Substitution/ Evaluation of different elements of this equation: q1q2l3
1
=
q1q2l3
0
−
[−l2cos(q1) + l3sin(q2)sin(q1) −l3cos(q2)cos(q1) −sin(q2)cos(q1)−l2sin(q1)− l3sin(q2)cos(q1) −l3cos(q2)sin(q1) −sin(q2)sin(q1)
0 −l3sin(q2) cos(q2)
] ∣∣∣∣∣−1
q1 = q10q2 = q20l3 = l30 −l2sin(q1)− l3sin(q2)cos(q1)− x
l2cos(q1)− l3sin(q2)sin(q1)− yl1 + l3cos(q2)− z
(30)
This produce values of q1, q2 and L3 after 1 iteration, and thenthis process is repeated for several iterations, in which their valuesconverge to the acceptable values to satisfy the equations f1, f2and f3 and these values become the solution of the inverse positionlevel kinematics.
Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz Robotics: Tutorial 3 23 / 33
Forward Velocity Level Kinematics
Using Chain rule:dx
dt=
(∂x
∂q
∂q
∂t
)(once for each q, in this case q1,q2 and L3).
x = −L2cos(q1)︸ ︷︷ ︸∂x
∂q1
q1︸︷︷︸∂q1∂t
+ L3sin(q2)sin(q1)︸ ︷︷ ︸∂x
∂q1
q1︸︷︷︸∂q1∂t
− L3cos(q2)cos(q1)︸ ︷︷ ︸∂x
∂q2
q2︸︷︷︸∂q2∂t
− sin(q2)cos(q1))︸ ︷︷ ︸∂x
∂L3
L3︸︷︷︸∂L3∂t
,
(31)
Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz Robotics: Tutorial 3 24 / 33

Similarly for y ,
y = −L2sin(q1)︸ ︷︷ ︸∂y
∂q1
q1︸︷︷︸∂q1∂t
− L3sin(q2)cos(q1)︸ ︷︷ ︸∂y
∂q1
q1︸︷︷︸∂q1∂t
− L3cos(q2)sin(q1)︸ ︷︷ ︸∂y
∂q2
q2︸︷︷︸∂q2∂t
+ sin(q2)sin(q1)︸ ︷︷ ︸∂y
∂L3
L3︸︷︷︸∂L3∂t
,
(32)Similarly for z ,
z = −L3sin(q2)︸ ︷︷ ︸∂z
∂q2
q2︸︷︷︸∂q2∂t
+ cos(q2)︸ ︷︷ ︸∂x
∂L3
L3︸︷︷︸∂L3∂t
, (33)
Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz Robotics: Tutorial 3 25 / 33

Place forward velocity level kinematics equation (31),(32) and (33)in a matrix form so that X = J(q)q: x
yz
=
−L2cq1 + L3sq2sq1 −L3cq2cq1 −sq2cq1−L2sq1 − L3sq2cq1 −L3cq2sq1 −sq2sq1
0 −L3sq2 cq2
q1q2L3
(34)
Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz Robotics: Tutorial 3 26 / 33

Inverse Velocity Level Kinematics
Place in q = J−1(q)X :
q1q2L3
=
−L2cq1 + L3sq2sq1 −L3cq2cq1 −sq2cq1−L2sq1 − L3sq2cq1 −L3cq2sq1 −sq2sq1
0 −L3sq2 cq2
−1 xyz
(35)
The inverse of Jacobian Matrix can be calculated using MATLAB.
Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz Robotics: Tutorial 3 27 / 33

Forward Acceleration Level Kinematics
Using the chain rule: dxdt =
(∂x∂q
∂q∂t + ∂x
∂q∂q∂t
)x = L2sin(q1)q1
︸ ︷︷ ︸∂x
∂q1
q1
︸︷︷︸∂q1
∂t
− L2cos(q1)
︸ ︷︷ ︸∂x
∂q1
q1
︸︷︷︸∂q1
∂t
+ L3cos(q2)sin(q1)q1
︸ ︷︷ ︸∂x
∂q2
q2
︸︷︷︸∂q2
∂t
+ L3sin(q2)cos(q1)q1
︸ ︷︷ ︸∂x
∂q1
q1
︸︷︷︸∂q1
∂t
+ L3sin(q2)sin(q1)
︸ ︷︷ ︸∂x
∂q1
q1
︸︷︷︸∂q1
∂t
+ sin(q2)sin(q1)q1
︸ ︷︷ ︸∂x
∂l3
L3
︸︷︷︸∂l3
∂t
+ L3cos(q2)sin(q1)q2
︸ ︷︷ ︸∂x
∂q1
q1
︸︷︷︸∂q1
∂t
+ L3sin(q2)cos(q1)q2
︸ ︷︷ ︸∂x
∂q2
q2
︸︷︷︸∂q2
∂t
− L3cos(q2)cos(q1)
︸ ︷︷ ︸∂x
∂q2
q2
︸︷︷︸∂q2
∂t
− cos(q2)cos(q1)q2
︸ ︷︷ ︸∂x
∂l3
L3
︸︷︷︸∂l3
∂t
+ L3sin(q2)sin(q1)
︸ ︷︷ ︸∂x
∂q1
q1
︸︷︷︸∂q1
∂t
− L3cos(q2)cos(q1)
︸ ︷︷ ︸∂x
∂q2
q2
︸︷︷︸∂q2
∂t
− sin(q2)cos(q1)
︸ ︷︷ ︸∂x
∂ l3
L3
︸︷︷︸∂ l3
∂t
,
(36)
Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz Robotics: Tutorial 3 28 / 33

y =−L2cos(q1)q1
︸ ︷︷ ︸∂y
∂q1
q1
︸︷︷︸∂q1
∂t
− L2sin(q1)
︸ ︷︷ ︸∂y
∂q1
q1
︸︷︷︸∂q1
∂t
+ L3sin(q2)sin(q1)q1
︸ ︷︷ ︸∂y
∂q1
q1
︸︷︷︸∂q1
∂t
− L3cos(q2)cos(q1)q1
︸ ︷︷ ︸∂y
∂q2
q2
︸︷︷︸∂q2
∂t
− L3sin(q2)cos(q1)
︸ ︷︷ ︸∂y
∂q1
q1
︸︷︷︸∂q1
∂t
− sin(q2)cos(q1)q1
︸ ︷︷ ︸∂y
∂l3
L3
︸︷︷︸∂l3
∂t
− L3cos(q2)cos(q1)q2
︸ ︷︷ ︸∂y
∂q1
q1
︸︷︷︸∂q1
∂t
+ L3sin(q2)sin(q1)q2
︸ ︷︷ ︸∂y
∂q2
q2
︸︷︷︸∂q2
∂t
− L3cos(q2)sin(q1)
︸ ︷︷ ︸∂y
∂q2
q2
︸︷︷︸∂q2
∂t
− cos(q2)sin(q1)q2
︸ ︷︷ ︸∂y
∂l3
L3
︸︷︷︸∂l3
∂t
− L3sin(q2)cos(q1)
︸ ︷︷ ︸∂y
∂q1
q1
︸︷︷︸∂q1
∂t
− L3cos(q2)sin(q1)
︸ ︷︷ ︸∂y
∂q2
q2
︸︷︷︸∂q2
∂t
− sin(q2)sin(q1)
︸ ︷︷ ︸∂y
∂ l3
L3
︸︷︷︸∂ l3
∂t
,
(37)
Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz Robotics: Tutorial 3 29 / 33

z = −L3cos(q2)q2
︸ ︷︷ ︸∂z
∂q2
q2
︸︷︷︸∂q2
∂t
− L3sin(q2)
︸ ︷︷ ︸∂z
∂q2
q2
︸︷︷︸∂q2
∂t
− sin(q2)q2
︸ ︷︷ ︸∂z
∂l3
L3
︸︷︷︸∂l3
∂t
− L3sin(q2)
︸ ︷︷ ︸∂z
∂q2
q2
︸︷︷︸∂q2
∂t
+ cos(q2)
︸ ︷︷ ︸∂z
∂ l3
L3
︸︷︷︸∂ l3
∂t
,
(38)
Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz Robotics: Tutorial 3 30 / 33

Forward Acceleration Kinematics Solution: Place equation(36),(37) and (38) in a matrix form so that X = J(q)q + J(q)q. x
y
z
=
−L2c(q1)+L3s(q2)s(q1) −L3c(q2)c(q1) −s(q2)c(q1)
−L2s(q1)−L3s(q2)c(q1) −L3c(q2)s(q1) −s(q2)s(q1)
0 −L3s(q2) c(q2)
q1
q2
L3
+
L2sq1 q1+L3sq2cq1 q1+L3cq2sq1 q2+L3sq2sq1 L3cq2sq1 q1+L3sq2cq1 q2−L3cq2cq1 sq2sq1 q1−cq2cq1 q2
−L2cq1 q1+L3sq2sq1 q1−L3cq2cq1 q2−L3sq2cq1 −L3cq2cq1 q1+L3sq2cq2 q2−L3cq2sq1 −sq2cq1 q1−cq2sq1 q2
0 −L3cq2 q2−L3sq2 −sq2 q2
q1
q2
L3
(39)
Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz Robotics: Tutorial 3 31 / 33

Inverse Acceleration Level Kinematics
The inverse acceleration kinematics solution is:
q = J−1(q)[X − J(q)q]
where, J−1(q) Inverse of Jacobian Matrix can be calculated usingMATLAB.
Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz Robotics: Tutorial 3 32 / 33
Any Questions ?Thank you
Dr. Islam Khalil, MSc. Omar Mahmoud, Eng. Lobna Tarek and Eng. Abdelrahman Ezz Robotics: Tutorial 3 33 / 33