Embed Size (px)
Citation preview

UNIVERSIDADE FEDERAL DO CEARÁ DEPARTAMENTO DE ENGENHARIA MECÂNICA E DE PRODUÇÃO
CURSO DE ENGENHARIA MECÂNICA
ROBSON SOUZA CAVALCANTE
DESENVOLVIMENTO DE SISTEMA PARA MENSURAR A INCLINAÇÃO DE EMBARCAÇÃO
FORTALEZA 2008
ROBSON SOUZA CAVALCANTE
DESENVOLVIMENTO DE SISTEMA PARA MENSURAR A INCLINAÇÃO DE EMBARCAÇÃO
Monografia submetida à Coordenação do Curso de Graduação em Engenharia Mecânica, da Universidade Federal do Ceará, como requisito parcial para obtenção do grau de Graduado em Engenharia Mecânica. Área de concentração: Universidade Federal do Ceará Orientador: Prof. Dr. Roberto de Araújo Bezerra.
FORTALEZA
2008

ROBSON SOUZA CAVALCANTE
DESENVOLVIMENTO DE SISTEMA PARA MENSURAR A INCLINAÇÃO DE EMBARCAÇÃO
Dissertação submetida à Coordenação do Curso de Graduação em Engenharia Mecânica, da Universidade Federal do Ceará, como requisito parcial para obtenção do grau de Graduado em Engenharia Mecânica. Área de concentração Universidade Federal do Ceará Aprovada em ___/___/______.
BANCA EXAMINADORA
__________________________________________________ Prof. Dr. Roberto de Araújo Bezerra (Orientador)
Universidade Federal do Ceará – UFC
_________________________________________________ Prof. Dr. Paulo Alexandre Costa Rocha
_________________________________________________ Prof. Dr. Ricardo Emílio F. Quevedo Nogueira

À mulher que eu amo

AGRADECIMENTOS
A Deus, por sempre estar ao meu lado me protegendo e guiando meu caminho.
A Luciana Limoeiro Ricarte, mulher que amo. “Por traz de um grande homem há
sempre uma grande mulher”.
A minha mãe, Eliane Maria Souza Cavalcante. Mulher de fibra e guerreira, no
qual eu sempre tive amor, apoio e sábios conselhos.
À família, pelo carinho, apoio moral e ajuda em momentos difíceis, em especial a
Rosane Souza Cavalcante, minha irmã, Francisco Hélio Pereira de Souza, Raimundo Holanda
Bezerra e Luiza de Marilaque Souza Holanda, tios amados e queridos.
Ao meu falecido avô, Francisco Chagas Cavalcante, por ter me ensinado valores
tão preciosos e ser ainda hoje uma de minhas maiores fontes de inspiração.
Aos meus colegas de trabalho, em especial ao Eng. Márcio Ferreira Igreja, chefe,
professor e amigo.
Ao Dr. Gil Bezerra, por acreditar no meu potencial como profissional.
Aos meus amigos.
Ao Prof. Dr. Roberto de Araújo Bezerra, por ter acreditado neste trabalho.

“Para quem não sabe aonde quer chegar, qualquer caminho é caminho.”
(Autor desconhecido)

RESUMO
O trabalho tem como objetivo projetar e construir um equipamento para mensurar a inclinação e a flutuação da embarcação em teste de estabilidade sem uso de água para o ajuste do equipamento. Um dos problemas enfrentados atualmente pela indústria naval na mensuração da inclinação e a flutuação de uma embarcação em teste de estabilidade e flutuação, esta diretamente relacionada ao equipamento utilizado para tal fim. O equipamento que vem sendo usado, atualmente, apresenta certas dificuldades no que se refere aos ajustes iniciais para os testes. Os testes de flutuação são, em geral, realizados em embarcações que estão em fase de acabamento e o equipamento atualmente utilizado consiste de um sistema pendular cuja estabilidade do equipamento é feita por intermédio de um suporte especial cheio de água. O suporte pode apresentar vazamento, que por sua vez, pode danificar o acabamento interno da embarcação. Uma alternativa para minimização deste problema seria a confecção de um instrumento que não utilizasse água em seu sistema de ajuste, um equipamento que utiliza o efeito da conservação do momento angular como sistema de ajuste.
Palavras - chave: Pêndulo Laser. Prova de Inclinação. Conservação do Momento Angular.

SUMÁRIO
1 INTRODUÇÃO ........................................................................................................ 09
1.1 O Problema ............................................................................................................... 09
1.2 O Pêndulo Laser ....................................................................................................... 09
1.3 Pêndulo Laser com Estabilização Giroscópica ....................................................... 10
2 PÊNDULO LASER CONVENCIONAL ................................................................. 11
3 ESTABILIZAÇÃO PELA CONSERVAÇÃO DO MOMENTO ANGULAR..... 15
4 PROTÓTIPO ............................................................................................................. 17
4.1 Motor .......................................................................................................................... 17
4.2 Disco e Eixo ................................................................................................................ 18
4.3 Módulo Laser ............................................................................................................. 19
4.3.1 Modelo ........................................................................................................................ 19
4.3.2 Características ............................................................................................................. 19
4.3.3 Especificações Mecânicas ........................................................................................... 19
4.3.4 Especificações Ópticas ................................................................................................ 19
4.3.5 Especificações Elétricas .............................................................................................. 20
4.3.6 Suporte do Módulo Laser ............................................................................................ 21
4.4 Base Principal ............................................................................................................ 21
4.5 Modelo 3D .................................................................................................................. 22
5. PROBLEMAS DECORRIDOS E SOLUÇÕES ALTERNATIVAS .................... 26
5.1 Problemas com o Primeiro Modelo ......................................................................... 26
5.2 Soluções Alternativas ................................................................................................ 27
5.2.1 Solução Para o Problema de Vibração ........................................................................ 27
5.2.2 Solução Para o Pedestal ............................................................................................... 29
6. TESTES ...................................................................................................................... 29
7. CONCLUSÃO ........................................................................................................... 30
REFERÊNCIAS .................................................................................................................... 31

9
1. INTRODUÇÃO.
1.1 O Problema.
Comumente são utilizados instrumentos arcaicos para mensurar a inclinação de
embarcação em prova. O mais usado é o pêndulo com cuba de óleo, conjunto de difícil
montagem e instalação, com alto risco de dano ao acabamento de cascos muito refinados,
como um iate. Um problema que acontece sempre no uso deste tipo de equipamento é o
vazamento de óleo proveniente da cuba de amortecimento do pêndulo e como conseqüência,
dano à madeira de revestimento do convés.
Devido aos problemas gerados no uso deste equipamento, um grupo de
engenheiros da INACE, Indústria Naval do Ceará, foi motivado a desenvolver um
equipamento que atendesse perfeitamente as necessidades da prova de inclinação.
1.2 O Pêndulo Laser.
O equipamento projetado foi um sistema de pêndulo laser, com dois subconjuntos
básicos: o pêndulo propriamente dito e uma mini-cuba a ele integrada, montado sobre um
tripé, e um segundo tripé, com um anteparo dotado de régua graduada.
O subconjunto que contém o pêndulo é constituído de uma haste principal no qual
é montado um cabeçote, onde está localizado o módulo LASER e o sistema de alimentação,
pilhas. No prolongamento inferior da haste é soldada uma barra no sentido transversal, que
fica mergulhada na mini-cuba contendo água, oferecendo resistência ao movimento, e
conseqüentemente, amortecendo a oscilação do pêndulo.
A teoria básica sobre a prova de inclinação demonstra que, quanto menor o ângulo
de banda máximo, mais coerentes serão os resultados. Por outro lado, quanto maior o porte da
embarcação, maiores serão os pesos inclinantes necessários e maiores também, as
dificuldades inerentes ao posicionamento e movimentação dos mesmos. Portanto, o problema
se resume na capacidade de medir pequenos ângulos com precisão.
Uma das características do pêndulo laser está no fato de que, apesar do mesmo
continuar a ser um pêndulo, seu comprimento físico é desvinculado do seu comprimento
virtual. O primeiro é a distância entre o pivô e o centro de gravidade do pêndulo físico,
composto pelo conjunto cabeça-haste-barra. Este comprimento é de cerca de 10 cm, enquanto
o do pêndulo convencional é medido em metros. Esta diferença tem impacto decisivo na

10
capacidade de amortecimento. Enquanto o presente instrumento pode ser freado por um
pequeno recipiente cheio de água o pêndulo convencional requer um volume de líquido muito
maior, e de viscosidade elevada, sendo comumente utilizado “óleo queimado”.
O comprimento virtual é a distância entre o pivô e o anteparo. Independente do
comprimento físico, existe a possibilidade de ser aumentado significativamente, sem os
reveses associados ao comprimento do pêndulo convencional. Basta afastar o anteparo do
suporte do pêndulo, ao longo da boca do navio.
Como exemplo comparativo, pode ser citado uma experiência passada por um dos
engenheiros da INACE, quando por ocasião da prova de inclinação de um supply , cuja boca
era igual a 11m, os cálculos preliminares da prova determinaram o uso, no pêndulo de ré, de
uma torre de andaimes modulares com 5 m de altura. As poitas de concreto utilizadas como
pesos inclinantes eram suficientes para produzir um ângulo máximo de apenas 0,5 graus. Se
houvesse, na época, sido utilizado um pêndulo laser, a boca da embarcação seria mais do que
suficiente para conter o comprimento virtual do pêndulo. Portanto é lícito supor que a boca de
uma dada embarcação será suficiente para, com reserva, sempre permitir o adequado
posicionamento do pêndulo laser.
1.3 Pêndulo Laser com Estabilização Giroscópica.
Supondo-se que a embarcação a ser estudada seja um iate, ocorrendo vazamento
da água contida na cuba de amortecimento do movimento pendular não danifica o
revestimento de madeira do convés, logo o pêndulo laser com estabilização a água é altamente
usual neste tipo de situação.
Iates são embarcações cujo convés principal é quase todo ocupado pela
superestrutura. O espaço interno da superestrutura tem um acabamento muito refinado, com o
piso todo recoberto por um carpete de alto acabamento. Muitas vezes acontece de o melhor
lugar a se instalar o pêndulo laser é dentro da superestrutura onde não é permitido nem
mesmo o vazamento de água para evitar danos ao acabamento da embarcação. Surge agora a
necessidade de uma forma alternativa de estabilizar o movimento pendular do pêndulo laser
sem fazer uso de amortecimento por fluido, onde este trabalho propõe uma alternativa
bastante simples.
O ótimo é que a embarcação da qual será sujeita a uma prova de inclinação, esteja
na fase mais avançada de construção, isto é, em uma fase de finalização do acabamento
interno.

11
Nesta fase da construção, a embarcação já possui o sistema de geração e
distribuição elétrico interno concluído. Podemos fazer uso da vantagem de haver energia
elétrica na embarcação para propor o desenvolvimento de um equipamento elétrico para
estabilização do movimento pendular, e a proposta é a integração de um giroscópio para
estabilizar o pêndulo laser.
2. PÊNDULO LASER CONVENSIONAL.
O pêndulo laser convencional é montado de acordo com a configuração como
mostrada na imagem. O pêndulo propriamente dito, montado em um bordo, equilibrado e
amortecido pela mini-cuba sobre um tripé. No outro bordo, um anteparo graduado com
figurado de maneira tal para que visualmente seja fácil visualizar o ponto de emissão do
módulo laser.
FIGURA 2.1 – Arranjo do sistema pêndulo laser no convés.

12
Em paralelo ao desenvolvimento do instrumento, adota-se um método no qual
considera as leituras absolutas obtidas diretamente na régua graduada, ao invés das deflexões
com relação ao navio sem banda.
O procedimento usual determina a impressão do gráfico Momento Inclinante
versus Tangente do Ângulo de Banda. As tangentes são obtidas a partir das deflexões, obtidas
pela subtração de uma dada leitura da leitura na posição não adernada. O formulário padrão,
previsto pela DPC, indica a necessidade da leitura desta posição em 3 movimentos.
Normalmente adota-se a média aritmética de 3 leituras como o "zero" de referência das
deflexões.
Contudo, normalmente este zero não é inpresso no gráfico, e nem os desvios da
média dos movimentos Inicial, 4 e 8. Usualmente restringimo-nos a avaliar visualmente a
proximidade da reta, interpolada através das demais leituras, com relação à origem do gráfico.
FIGURA 2.2 – Anteparo Graduado.

13
O pêndulo convencional é montado em um corpo de bronze usinado, como
apresentado na figura abaixo. Todo o corpo do pêndulo é apoiado pelos braços, em forma de
cunha, que tem por objetivo reduzir a área de contato de apoio. Os furos transversais são para
fixação da palheta onde é instalado o sistema de alimentação de energia do laser (pilhas,
conectores e chaveamento), além de um peso para regulagem vertical do laser. No furo
longitudinal é acoplado por encaixe o módulo laser.
FIGURA 2.3 – Pêndulo Laser.
FIGURA 2.4 – Detalhe da Cabeça do Pêndulo.

14
Abaixo é apresentada a mini-cuba de amortecimento. A mini-cuba tem um
volume aproximado de 10 litros. Estruturas transversais são instaladas, chicanas, para reduzir
o efeito de superfície livre do líquido (água) devido o caturro da embarcação. No topo da
mini-cuba está montado braços, feitos de aço inox, no qual serão apoiados os braços da
cabeça do pêndulo. As chicanas do centro são cortadas para não interferir no movimento do
pêndulo. No fundo da mini-cuba está soldado um dreno com uma válvula esfera para
esvaziamento da água ao término de uso do equipamento.
FIGURA 2.5 – Mini-cuba.

15
3. ESTABILIZAÇÃO PELA CONSERVAÇÃO DO MOMENTO ANGULAR.
A proposta de desenvolvimento de um protótipo que substitua o pêndulo laser
convencional, está em mudar o sistema de estabilização do pêndulo de amortecimento fluido
para estabilização pela conservação do momento angular, assim como o utilizado em
equipamentos giroscópios.
FIGURA 3.1 – Pião.
Como mostrado na figura, pela conservação do momento angular, o objeto
mantém sua posição vertical, com pondo de apoio na madeira. Basta imaginar agora, se esse
efeito for reproduzido com o objeto verticalmente invertido. Ele manterá seu eixo vertical,
perpendicular ao plano de rotação do disco.
O sistema tenta sempre estabilizar, alinhando seu eixo vertical com a direção da
força gravitacional, independente se há mudança ou não da inclinação do plano de apoio.
FIGURA 3.2 – Forças agindo sobre o pião.

16
Quando o pião recebe alguma influência externa, mudando a posição do seu eixo
principal, surge um binário tentando desequilibrar-lo, formado pela força gravitacional e a
força de reação no ponto de apoio. Se o corpo estiver girando com uma velocidade angular
suficiente para gerar um τ suficientemente maior para vencer o binário gerado, o corpo
retornará à posição de equilíbrio inicial.
Da mesma forma ocorre com o pêndulo laser. Pela alta rotação do disco, o
pêndulo tende a se estabilizar voltando para a posição de equilíbrio por meio de um momento
restaurador gerado, de acordo com o princípio da conservação do momento angular.
FIGURA 3.3 – Momento Restaurador.
Temos que o torque gerado pelo momento angular pode ser calculado por:
Onde I é o momento de inércia do objeto e ω é a velocidade angular. Em um
sistema fechado, o movimento angular é constante.

17
4. PROTÓTIPO.
4.1 Motor.
O motor escolhido é um FOX, sewing machine motor MG-100, com as seguintes
características:
• 100 W;
• 0,5 A;
• 220V;
• 50 / 60 Hz;
• 6000 rpm;
FIGURA 4.1.1 – Motor utilizado no protótipo.
Para instalar o eixo para transferir movimento ao disco, foi usinada a ponta do
eixo do motor para poder passar um parafuso, com a função de pino de travamento. A chave
de energia foi montada de forma invertida para reduzir a probabilidade de acidentes como o
enroscamento do fio no eixo do motor. O acelerador de pé foi montado solto, externo ao
protótipo, com passagem dos fios de maneira tal que não interfira no movimento do pêndulo.

18
4.2 Disco e Eixo.
O disco utilizado é uma liga naval, alumínio 5083-O, cortado de sobra de material
e usinado posteriormente com diâmetro de 290 mm, espessura de 5 mm, e massa igual a
879,49g.
O eixo foi confeccionado de alumínio, liga 6061 H116, usinado com sobra de
material, com diâmetro de 15 mm e 700 mm de comprimento, usinado em uma extremidade
com rosca e outra extremidade com um furo na peça para encaixe do eixo do motor e furo
transversal para fixação.
FIGURA 4.2.1 – Conjunto Disco – Eixo.

19
4.3 Módulo Laser.
4.3.1 Modelo:
• Fabricante: LASERLINE;
• Modelo: LRM40.
4.3.2 Características:
• Emissão em 650nm com alta visibilidade;
• Potência mínima de 40mW com tamanho reduzido;
• Foco colimado e ajustável;
• Circuito protetor contra excesso de temperatura;
• Construção robusta, resistente a choques e a vibração.
4.3.3 Especificações Mecânicas:
• Peso: 7 gramas;
• Material do invólucro: Alumínio;
• Tratamento da Superfície: Anodizado (preto);
• Dimensões do Módulo: Ver figura abaixo.
4.3.4 Especificações Ópticas:
• Comprimento de Onda: 650nm;
• Potência de Saída: 40mW;
• Estabilidade de potência: +/- 1 %;
• Desvio de frequência: 0,2nm / °C;
• Ruído (B.P. de 20MHz): < 0,7% RMS;
• Modo de Operação: Contínua;
• Divergência: < 1.8mrad;
• Tamanho do Ponto: Ajustável;
• Formato do Ponto: Elíptico.

20
• Estabilidade do Ponto: < 50mrad;
• Classe: IIIb.
4.3.5 Especificações Elétricas:
• Tensão de Alimentação: 4 a 5 Volts;
• Consumo de Corrente: < 120mA;
• Temperatura de Operação: -10 a 36°C;
• Modulação Externa: 0 a 2,5KHz. * Chaveamento ON/OFF;
• Circuito de Controle: Controle automático de corrente;
• Conexão Elétrica: Fios vermelho e preto com 12cm.;
• Conector padrão: Conector tipo MOLEX®.
FIGURA 4.3.5.1 – Módulo Laser.
FIGURA 4.3.5.2 – Dimensional do Módulo Laser.
21
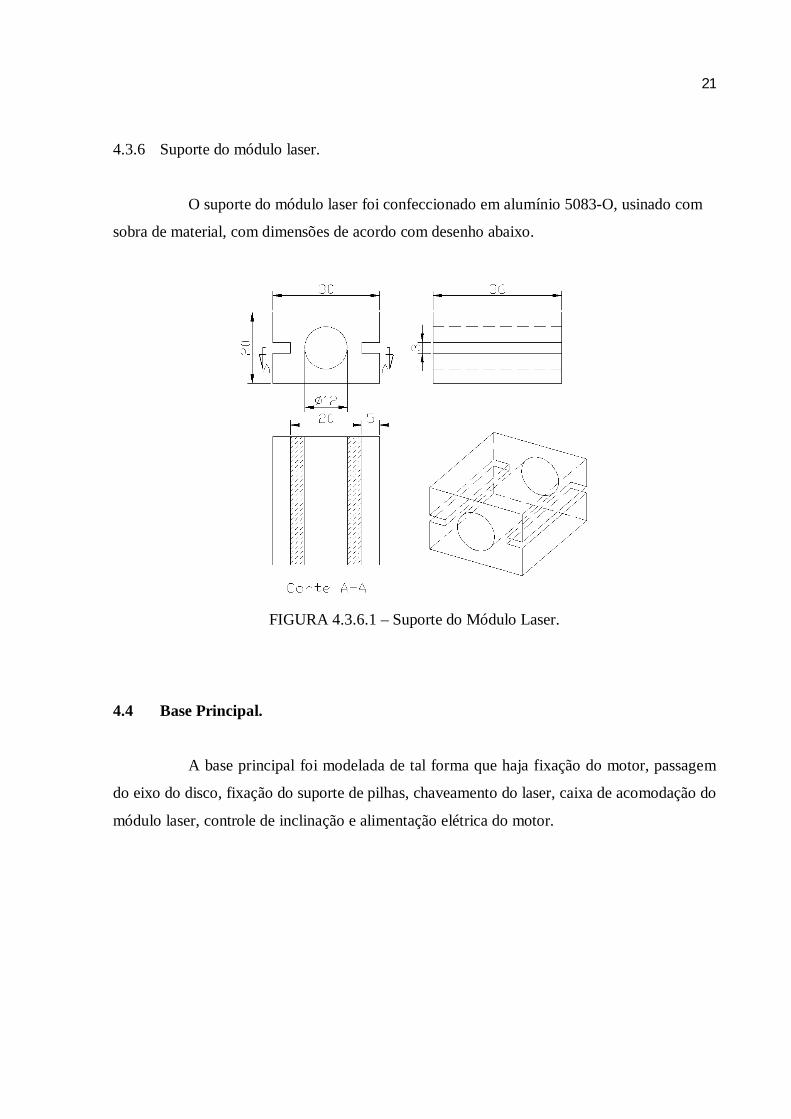
4.3.6 Suporte do módulo laser.
O suporte do módulo laser foi confeccionado em alumínio 5083-O, usinado com
sobra de material, com dimensões de acordo com desenho abaixo.
FIGURA 4.3.6.1 – Suporte do Módulo Laser.
4.4 Base Principal.
A base principal foi modelada de tal forma que haja fixação do motor, passagem
do eixo do disco, fixação do suporte de pilhas, chaveamento do laser, caixa de acomodação do
módulo laser, controle de inclinação e alimentação elétrica do motor.

22
Pode-se ver na figura abaixo, entre os componentes explodidos, ao centro, a base
modelada.
FIGURA 4.4.1 – Conjunto Explodido.
4.5 Modelo 3D.
Um modelo 3D foi feito inicialmente como ponto de partida para fabricação e
montagem das peças a serem confeccionadas de acordo com os equipamentos escolhidos e
adquiridos, levando em consideração também as limitações da oficina de usinagem do
estaleiro, local no qual foram fabricadas, soldadas e usinadas, quando necessário, as peças do
conjunto.

23
FIGURA 4.5.1 – Modelo 3D.
FIGURA 4.5.2 – Modelo 3D.

24
FIGURA 4.5.3 – Modelo 3D.
FIGURA 4.5.4 - Modelo 3D.

25
FIGURA 4.5.5 - Modelo 3D.
FIGURA 4.5.6 - Modelo 3D.

26
FIGURA 4.5.7 - Modelo 3D.
5. PROBLEMAS DECORRIDOS E SOLUÇÕES ALTERNATIVAS.
5.1 Problemas com o primeiro modelo.
Quando o primeiro modelo ficou pronto, um problema de vibração muito forte foi
detectado. Quando o motor entrava era ligado e acelerado, o conjunto passava pelo ponto de
freqüência natural do eixo, o modelo vibrava muito a ponto de quase desmontar nesse
instante. Pouco tempo depois, o motor entrava em regime permanente, mas mesmo assim o
modelo continuava vibrando muito e não estava estabilizando o pêndulo.
Foram detectados os seguintes problemas:
• Eixo muito curto, não gerando efeito de estabilização;
• Eixo do disco sem apoio e folga na montagem com o motor;
• Conjunto da base principal montado sobre rolamentos não tinha boa fixação, na
forma no qual o modelo foi pensado.

27
5.2 Soluções Alternativas.
5.2.1 Solução para o problema da vibração.
Para solucionar o problema da vibração do eixo, foi soldada à base principal um
tubo, trabalhando assim como uma espécie de tubo telescópico como os usados nas linhas de
eixo das embarcações.
Na extremidade inferior do tubo, foi usinado um pequeno bloco de TECNIL,
lubrificado com vaselina para reduzir o atrito com o eixo do disco.
Na extremidade superior, próximo à base principal, foram soldados dois blocos de
alumínio para poder dar altura para soldagem do tubo, visto que, se o tubo fosse soldado
diretamente à base principal, não haveria espaço suficiente para o parafuso de fixação do eixo
do disco ao motor, além de também de não dar espaço para fixação do motor à base principal.
FIGURA 5.2.1.1 – Bucha de Tecnil.

28
FIGURA 5.2.1.2 – Base Soldada.
FIGURA 5.2.1.3 – Tubo Estabilizador do Eixo do Disco.

29
5.2.2 Solução para o Pedestal.
O pedestal era muito curto para poder aumentar o eixo do disco. A intenção era
que na base do pedestal fosse soldada borboletas e aparafusadas pedras, integrando um tripé
ao suporte. A solução encontrada foi remodelar o suporte para uma estrutura tubular.
Um outro problema também resolvido pela solução de construir a estrutura
tubular foi a fixação dos rolamentos. Dois pedaços de tubos cortados, usinados as
extremidades de forma a servir como mancais.
FIGURA 5.2.2.1 – Estrutura Tubular.
6. TESTES.
O sistema foi simulado em uma espécie de gangorra com caturro manual para
simular o caturro de uma embarcação real. Posicionou-se o anteparo a uma distancia
conhecida.

30
O sistema foi testado, mas os resultados não foram satisfatórios, comparados
pelos operadores, usando da experiência de uso dos pêndulos lasers convencionais.
O ponto de projeção do laser do sistema no anteparo graduado oscilava entre o
máximo e o mínimo, mas em um range muito pequeno no qual dificultava a leitura dos
máximos e mínimos pelo operador.
7. CONCLUSÃO.
Embora o sistema não tenha atingido uma estabilização tão satisfatória, podemos
avaliar o experimento de forma positiva, com a possibilidade de melhoras futuras do modelo,
visto que haverá a disponibilidade e necessidade da empresa para o desenvolvimento real
deste equipamento.

31
REFERÊNCIAS
LEWIS, Edward V. Principles of Naval Architecture. 2.ed. Jersey City: New Jersey, 1988. ISBN No. 0-939773-00-7.
FONSECA, Maurício M. Arte Naval. 6.ed. Rio de Janeiro: Rio de Janeiro, 2002. ISBN No. 85-7047-051-7.
IGREJA, Márcio Ferreira. Anexo III - Descrição do Pêndulo Laser, e dos Artifícios de Cálculo Relacionados a Sua Utilização. Relatório da Prova de Inclinação – Navio Patrulha 500t. Fortaleza: Ceará. Julho. 2008.
HALLIDAY; RESNICK; WALKER. Fundamentos de Física: Mecânica – Volume 1. 7.ed. 2006. ISBN No. 8521614845.






















![[FEII] Relatório - Pêndulo; Gravidade](https://img.pdfslide.net/doc/110x75/5572111e497959fc0b8e5f95/feii-relatorio-pendulo-gravidade.jpg)





