Embed Size (px)
Citation preview
P. Rodríguez-Ayerbe, S. Olaru, A. Nguyen, R. Koduri
L2S, CentraleSupélec – CNRS – UPSUniversité Paris-Saclay
29 June 2016
European Control Conference
Robustness margins and robustification of nominal explicit MPC
ECC – 29 June 2016 2
Robustness margins and robustification of nominal explicit MPC
Outline
Problem statement
Robustness margins• Polytopic uncertainty
• Gain margin
• Neglected dynamics
Robustification of explicit solutions
ECC – 29 June 2016 3
Robustness margins and robustification of nominal explicit MPC
Problem statement
A nominal discrete time linear systems( 1) ( ) ( )( ) ( )
x k Ax k Bu ky k Cx k
A function defined over a polyhedral partition
: ppwau X
N
ni I iX X
1
( )pwa i i i
p n pi i
u x G x g for x X
G g
Is a piecewise affine control law over the partition X
ECC – 29 June 2016 4
Robustness margins and robustification of nominal explicit MPC
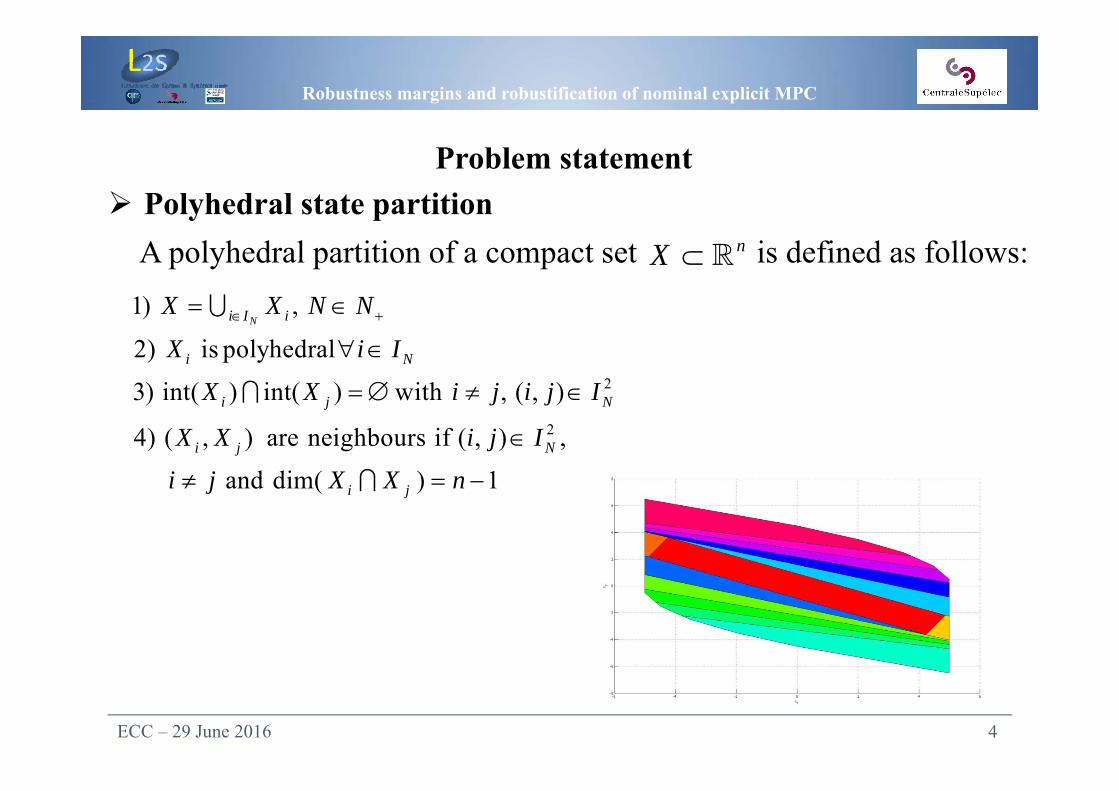
Polyhedral state partition
2
2
1) ,
2) is polyhedral
3) int( ) int( ) with , ( , )
4) ( , ) are neighbours if ( , ) ,
and dim( ) 1
Ni I i
i N
i j N
i j N
i j
X X N N
X i I
X X i j i j I
X X i j I
i j X X n
A polyhedral partition of a compact set is defined as follows: nX
Problem statement
ECC – 29 June 2016 5
Robustness margins and robustification of nominal explicit MPC
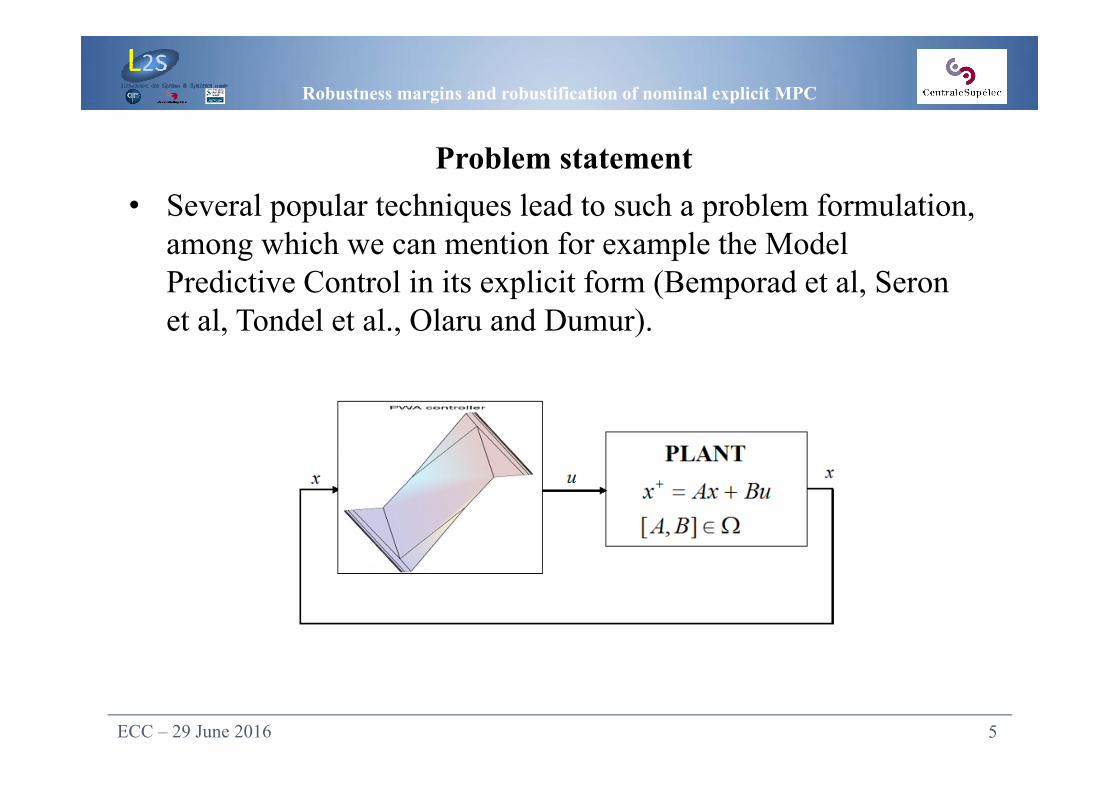
Problem statement• Several popular techniques lead to such a problem formulation,
among which we can mention for example the Model Predictive Control in its explicit form (Bemporad et al, Seronet al, Tondel et al., Olaru and Dumur).
ECC – 29 June 2016 6
Robustness margins and robustification of nominal explicit MPCPr
ésen
tatio
n
Goals:
• To analyse the inherent robustness of PWA control towards model uncertainties → robustness margin problems.
• To further tune the original controller to improve robustness margin.
• Synthesize explicit solution with good robustness margin.
Problem statement

ECC – 29 June 2016 7
Robustness margins and robustification of nominal explicit MPC
Outline
Problem statement
Robustness margins• Polytopic uncertainty
• Gain margin
• Neglected dynamics
Robustification of explicit solutions

ECC – 29 June 2016 8
Robustness margins and robustification of nominal explicit MPCPr
ésen
tatio
n
Robustness margins• Nominal closed loop
The nominal closed loop dynamics represent a PWA system:
0 0 0( 1) ( ) ( ) for ( )pwa i i ix k f x k A B G x k B g x k X
• Positive invariance
0
A set is posive invariant with respect to the system ( 1) ( ), if for any ( ) ,
( )
n
pwa
Xx k f x k w x k X
x k X k
ECC – 29 June 2016 9
Robustness margins and robustification of nominal explicit MPCPr
ésen
tatio
n
Robustness margins• Assumptions
• The set X is a polytope
• The set X is positive invariant with respect to the nominal model
• The control is continuous
• The origin is the only fixed point of the nominal dynamics
• The origin is asymptotically stable with X as basin of attraction
: n mpwau
ECC – 29 June 2016 10
Robustness margins and robustification of nominal explicit MPCPr
ésen
tatio
n
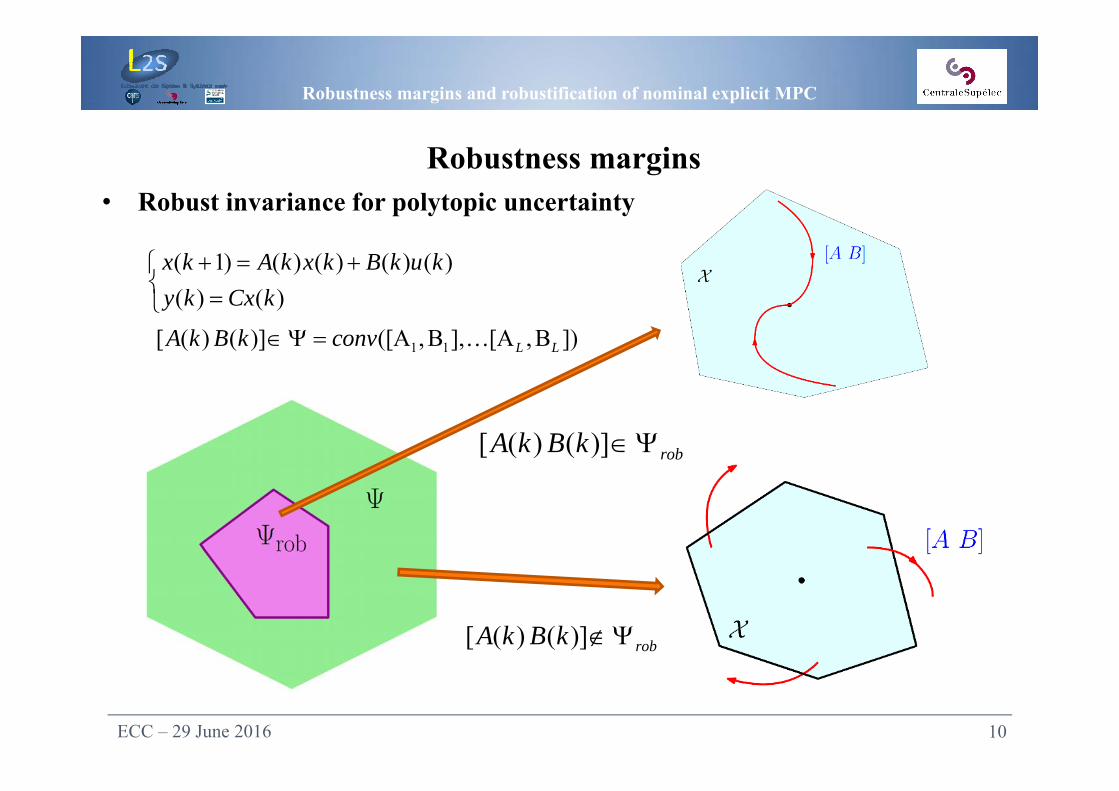
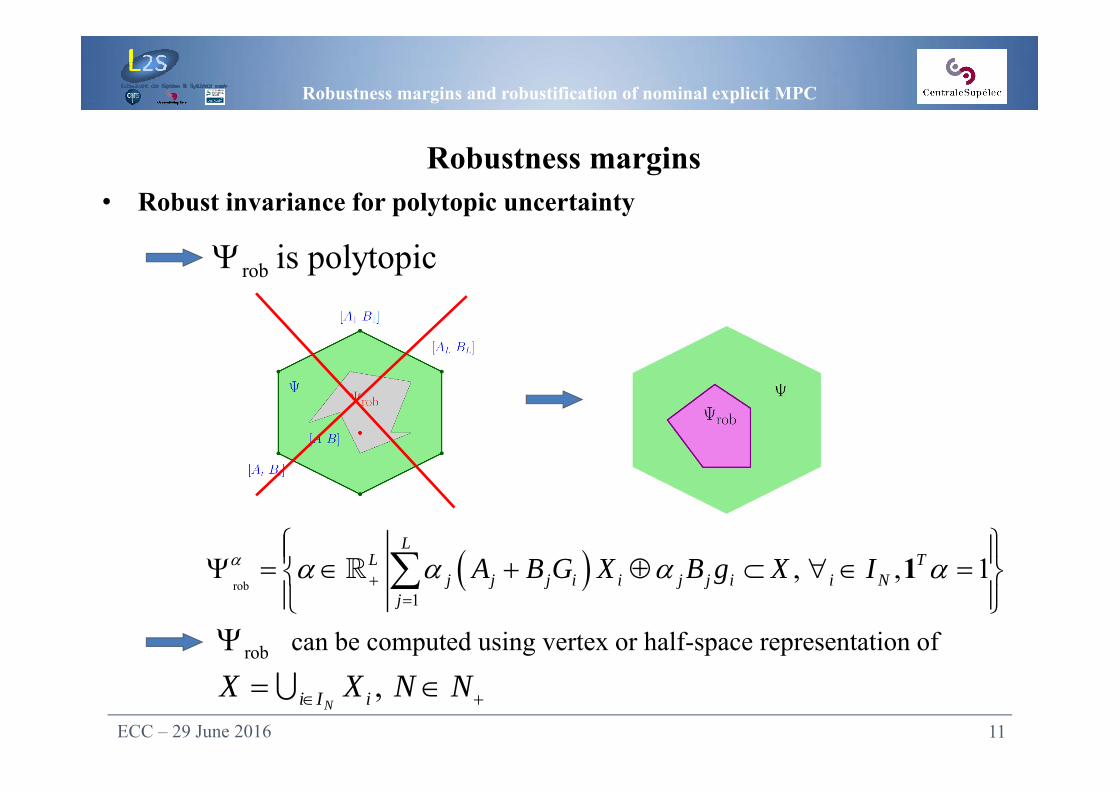
Robustness margins• Robust invariance for polytopic uncertainty
( 1) ( ) ( ) ( ) ( )( ) ( )
x k A k x k B k u ky k Cx k
1 1[ ( ) ( )] ([A , B ], [A ,B ])L LA k B k conv
[ ( ) ( )] robA k B k
[ ( ) ( )] robA k B k
ECC – 29 June 2016 11
Robustness margins and robustification of nominal explicit MPCPr
ésen
tatio
n
Robustness margins• Robust invariance for polytopic uncertainty
rob is polytopic
can be computed using vertex or half-space representation ofrob,
Ni I iX X N N
rob
1, , 1
LL T
j j j i i j j i i Nj
A B G X B g X I
1
ECC – 29 June 2016 12
Robustness margins and robustification of nominal explicit MPCPr
ésen
tatio
n
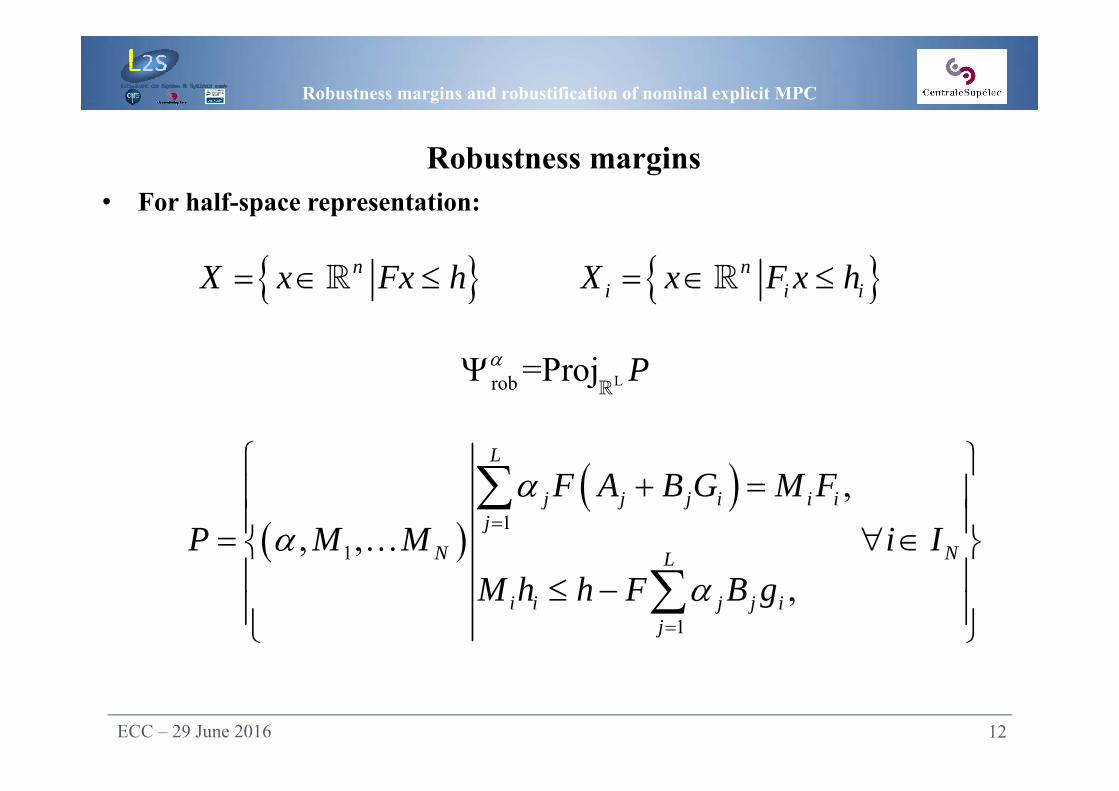
Robustness margins• For half-space representation:
Lrob =Proj P
11
1
,, ,
,
L
j j j i i ij
N NL
i i j j ij
F A B G M FP M M i I
M h h F B g
nX x Fx h ni i iX x F x h
ECC – 29 June 2016 13
Robustness margins and robustification of nominal explicit MPC
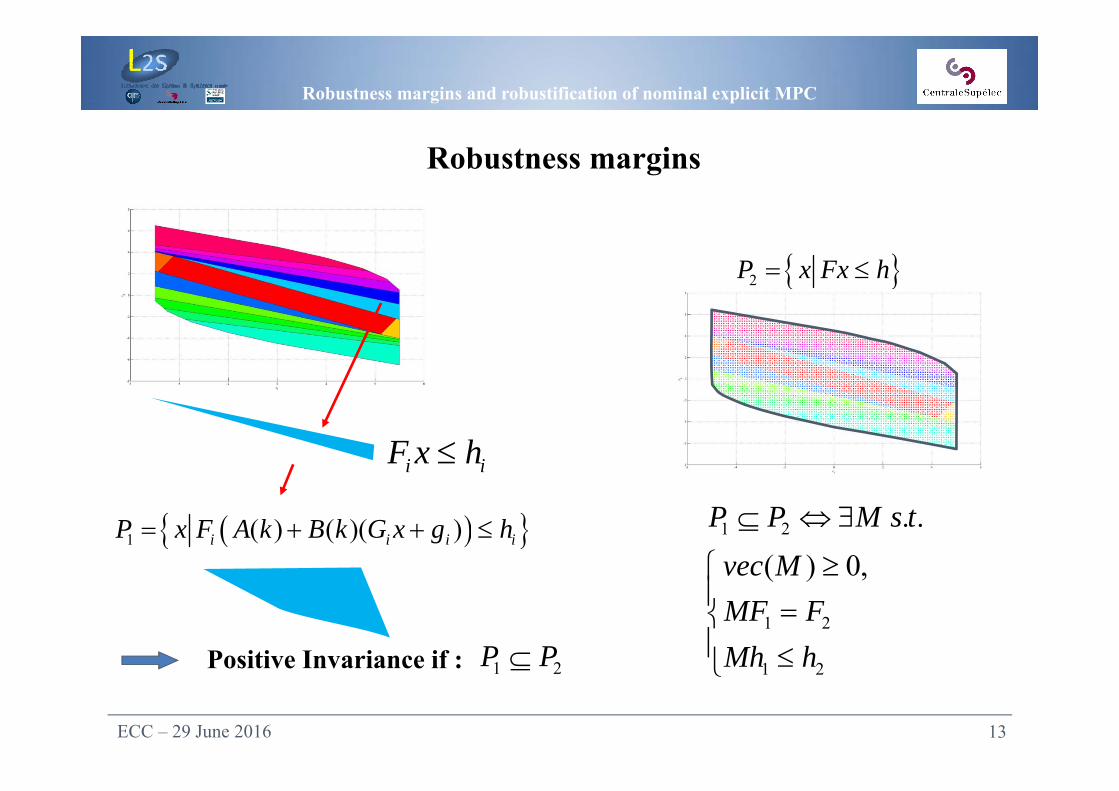
i iF x h
2P x Fx h
1 2
1 2
1 2
. .( ) 0,
P P M s tvec MMF FMh h
1 ( ) ( )( )i i i iP x F A k B k G x g h
Positive Invariance if : 1 2P P
Robustness margins
ECC – 29 June 2016 14
Robustness margins and robustification of nominal explicit MPCPr
ojet
de
rech
erch
e
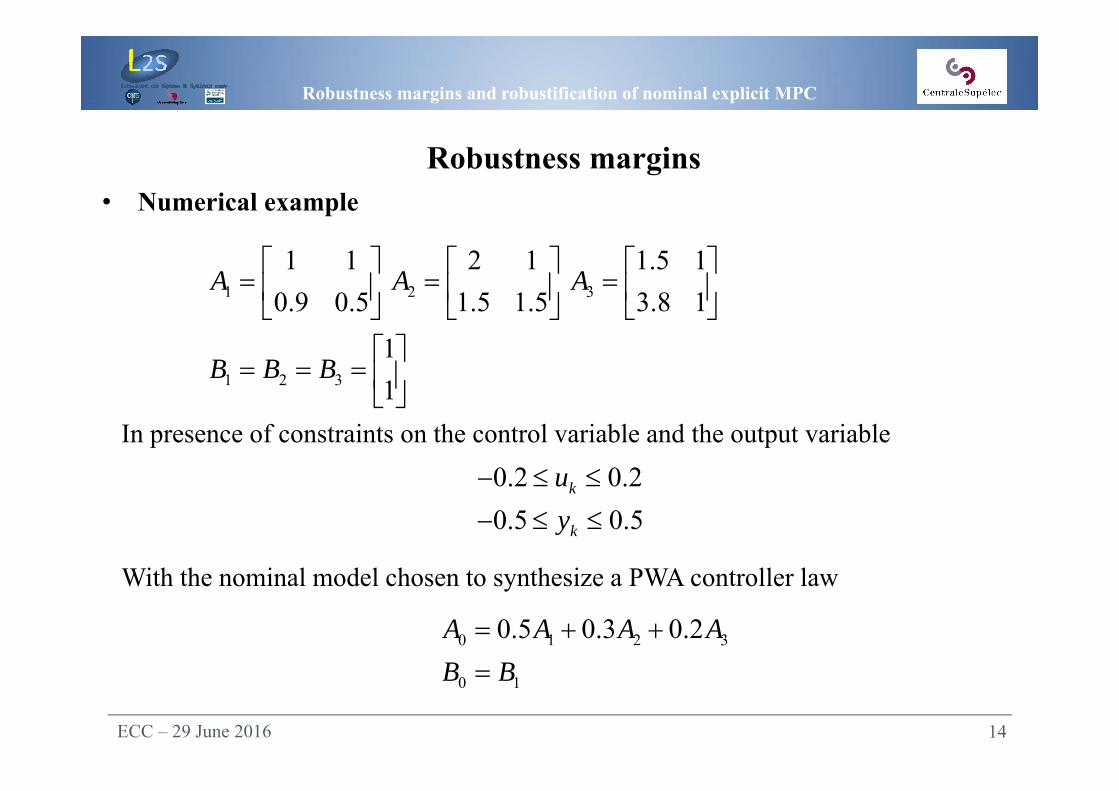
Robustness margins• Numerical example
1 2 3
1 2 3
1 1 2 1 1.5 10.9 0.5 1.5 1.5 3.8 1
11
A A A
B B B
In presence of constraints on the control variable and the output variable
0.2 0.20.5 0.5
k
k
uy
With the nominal model chosen to synthesize a PWA controller law
0 1 2 3
0 1
0.5 0.3 0.2A A A AB B
ECC – 29 June 2016 15
Robustness margins and robustification of nominal explicit MPCPr
ojet
de
rech
erch
e
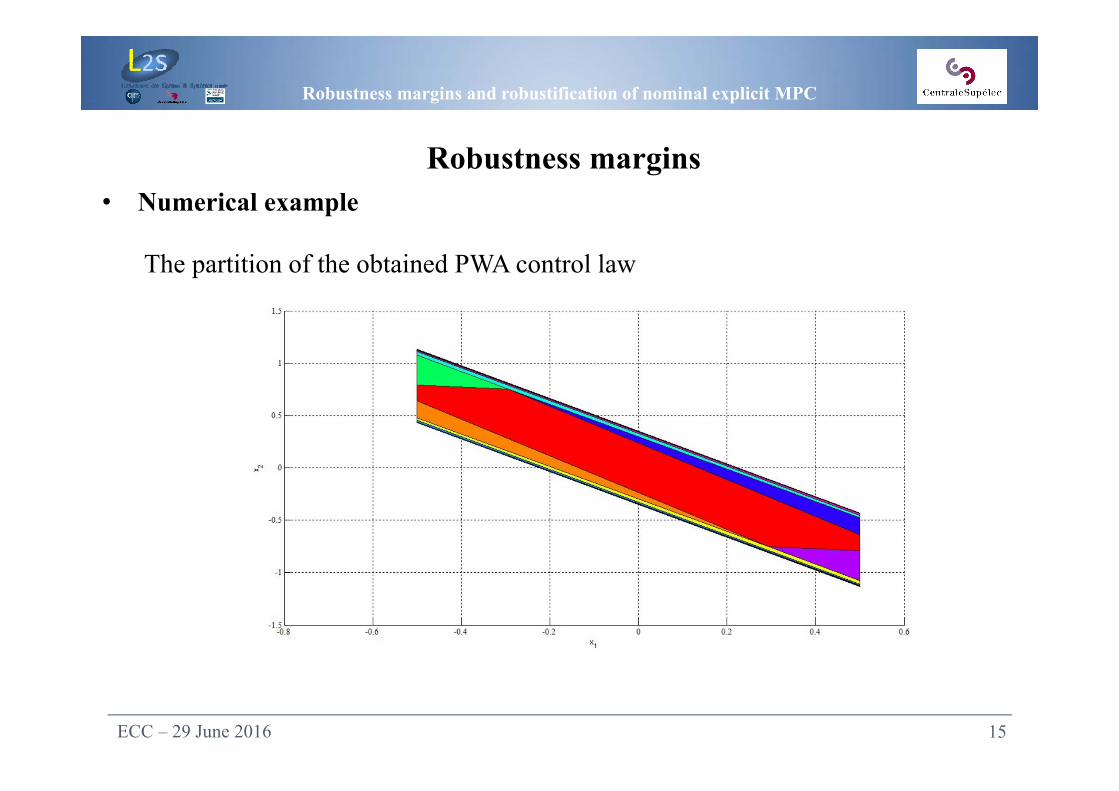
Robustness margins• Numerical example
The partition of the obtained PWA control law
ECC – 29 June 2016 16
Robustness margins and robustification of nominal explicit MPCPr
ojet
de
rech
erch
e
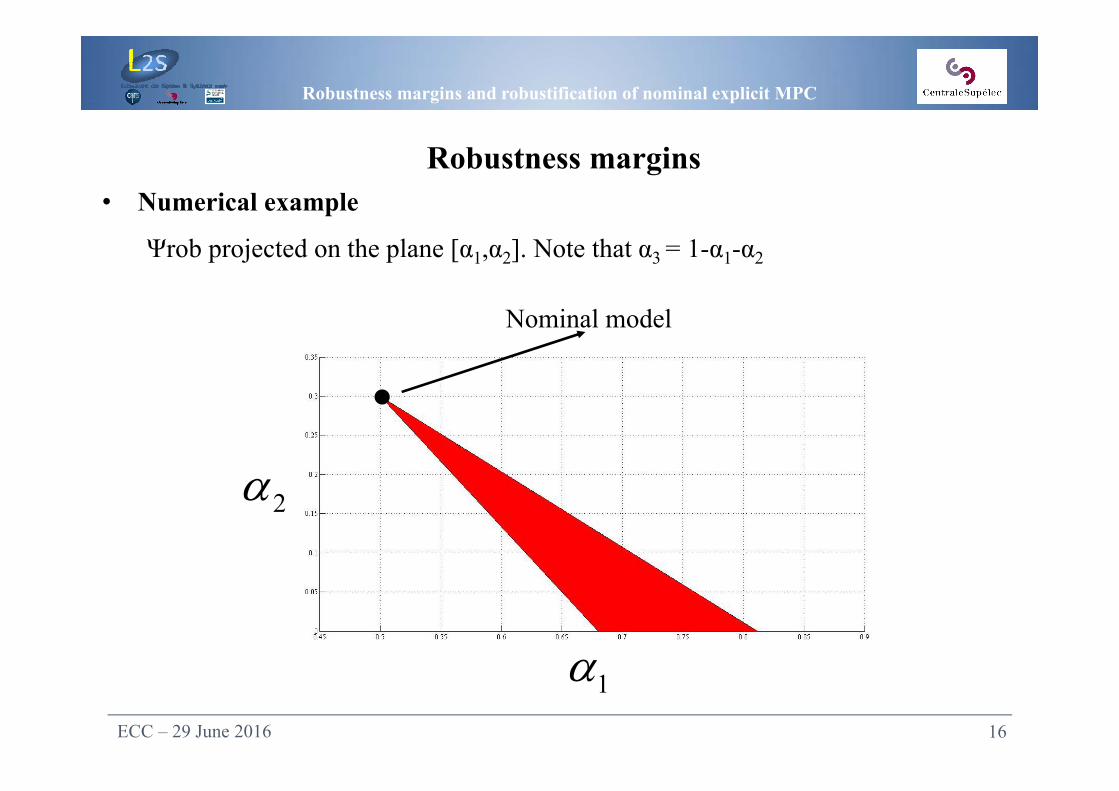
Robustness margins• Numerical example
Ψrob projected on the plane [α1,α2]. Note that α3 = 1-α1-α2
1
2
Nominal model
ECC – 29 June 2016 17
Robustness margins and robustification of nominal explicit MPCPr
ojet
de
rech
erch
e
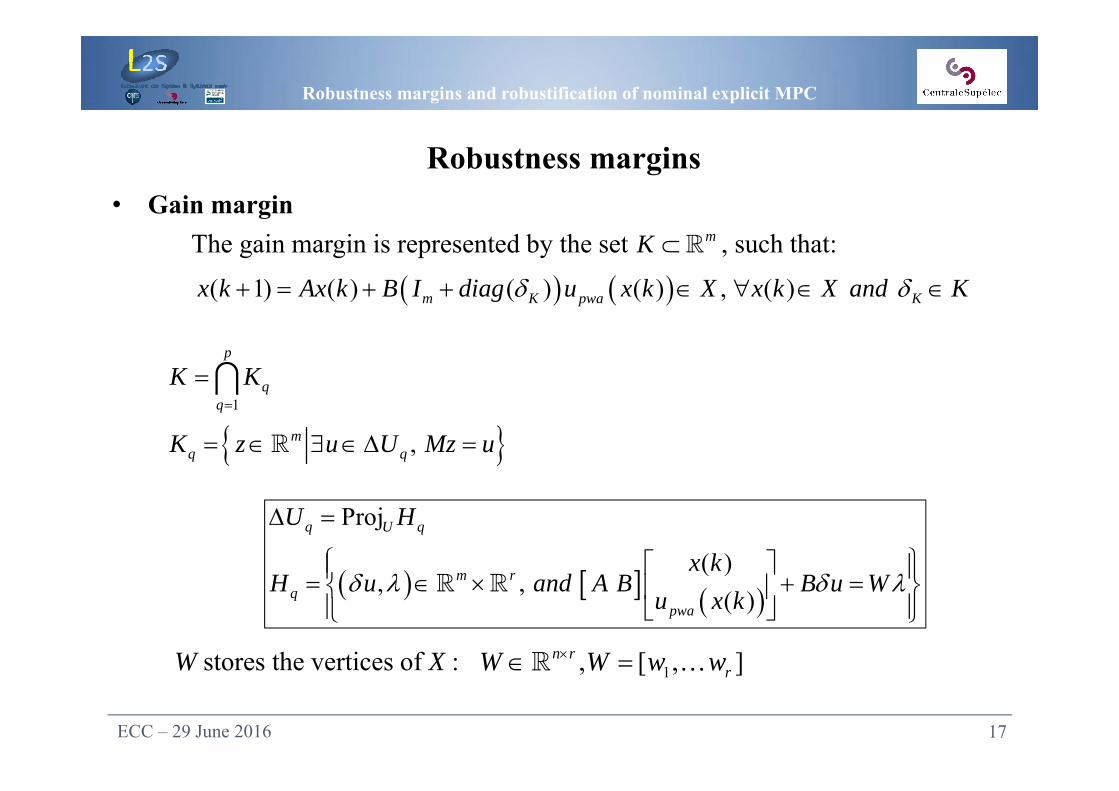
Robustness margins• Gain margin
The gain margin is represented by the set , such that:
( 1) ( ) ( ) ( ) , ( )m K pwa Kx k Ax k B I diag u x k X x k X and K
mK
1
,
p
mq q
K K
K z u U Mz u
Proj
( ), ,
( )
q U q
m rq
pwa
U H
x kH u and A B B u W
u x k
W stores the vertices of X : 1, [ , ]n rrW W w w
ECC – 29 June 2016 18
Robustness margins and robustification of nominal explicit MPCPr
ojet
de
rech
erch
e
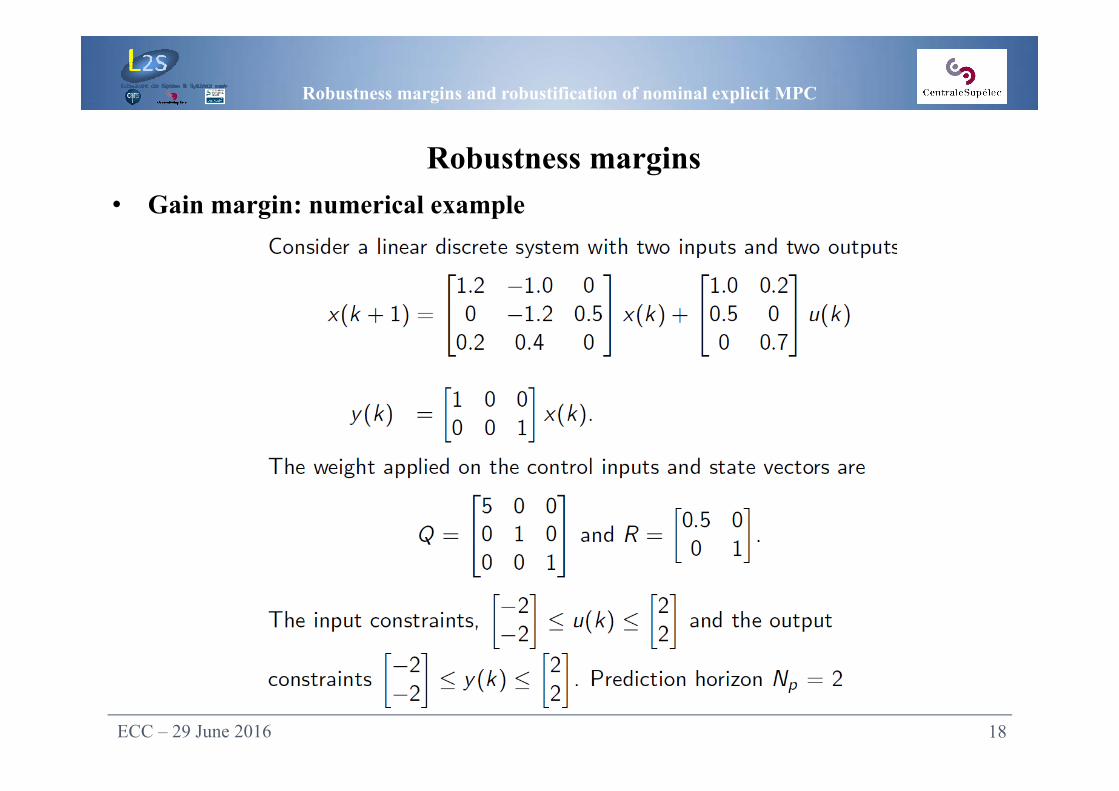
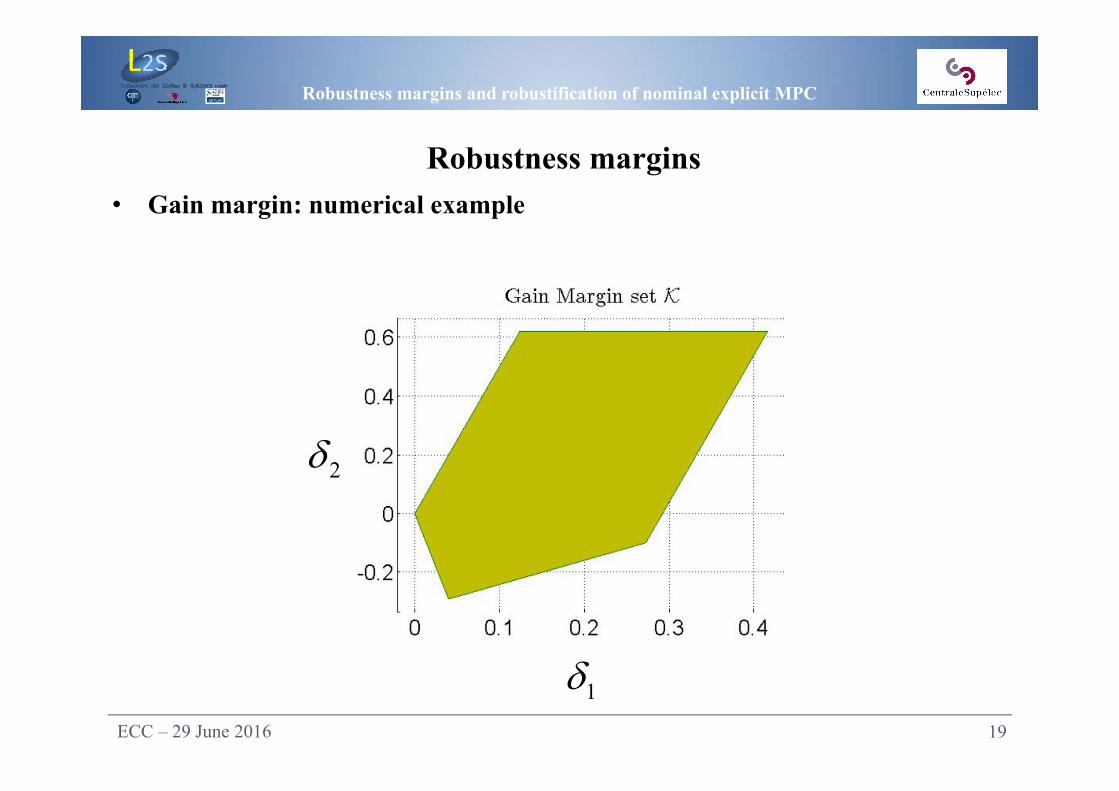
Robustness margins• Gain margin: numerical example
ECC – 29 June 2016 19
Robustness margins and robustification of nominal explicit MPCPr
ojet
de
rech
erch
e
Robustness margins• Gain margin: numerical example
2
1
ECC – 29 June 2016 20
Robustness margins and robustification of nominal explicit MPCPr
ojet
de
rech
erch
e
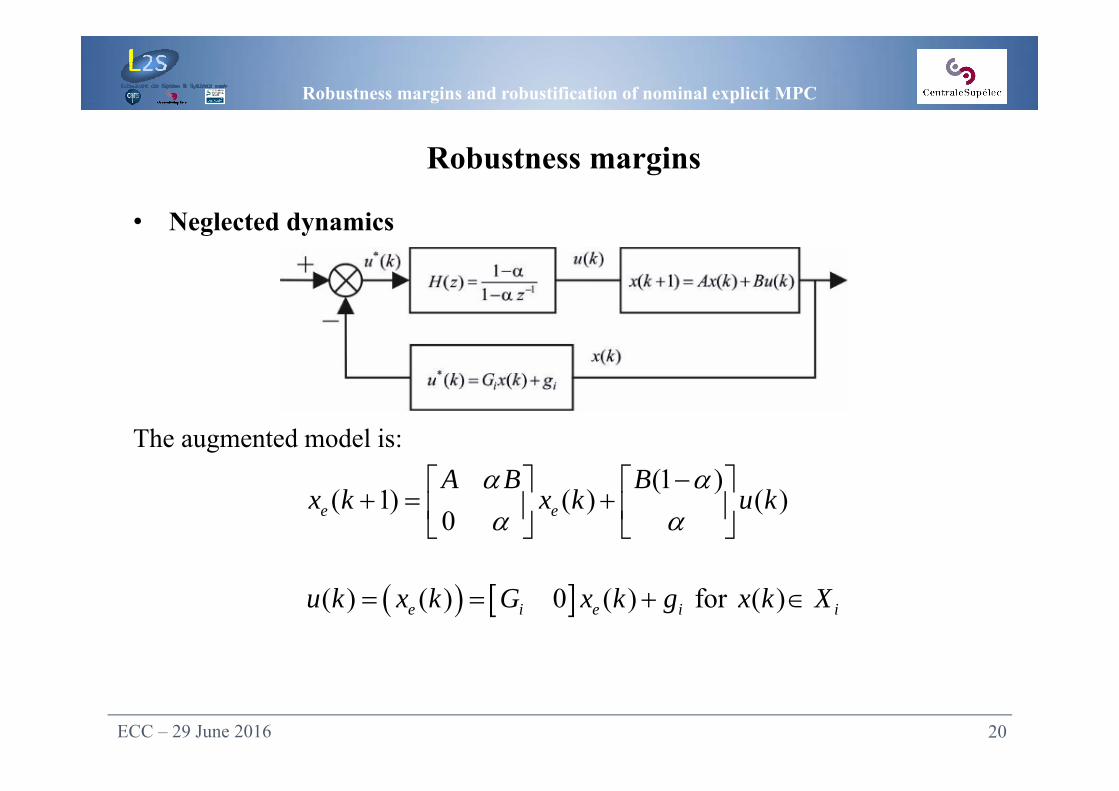
Robustness margins
• Neglected dynamics
The augmented model is:(1 )
( 1) ( ) ( )0e e
A B Bx k x k u k
( ) ( ) 0 ( ) for ( )e i e i iu k x k G x k g x k X
ECC – 29 June 2016 21
Robustness margins and robustification of nominal explicit MPCPr
ojet
de
rech
erch
e
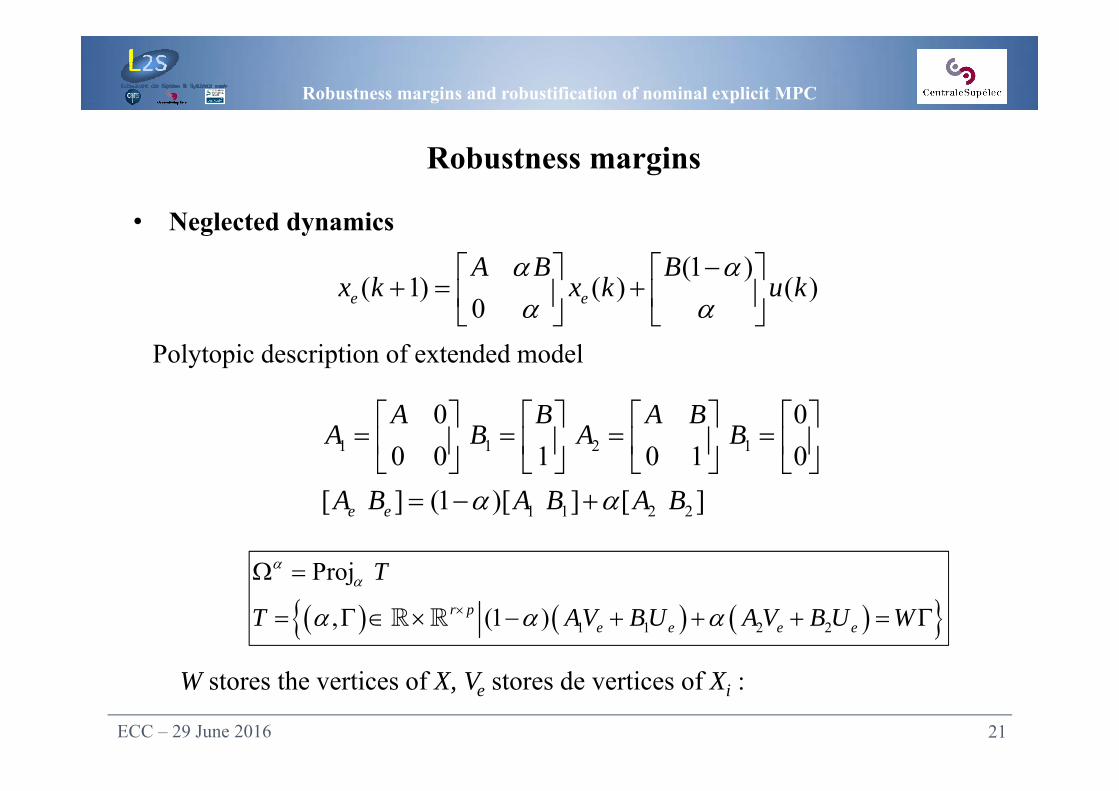
Robustness margins
• Neglected dynamics
1 1 2 2
Proj
, (1 )r pe e e e
T
T AV BU A V B U W
W stores the vertices of X, Ve stores de vertices of Xi :
(1 )( 1) ( ) ( )
0e e
A B Bx k x k u k
Polytopic description of extended model
1 1 2 1
1 1 2 2
0 00 0 1 0 1 0
[ ] (1 )[ ] [ ]e e
A B A BA B A B
A B A B A B
ECC – 29 June 2016 22
Robustness margins and robustification of nominal explicit MPCPr
ojet
de
rech
erch
e
Robustness margins
• Neglected dynamics : numerical example
ECC – 29 June 2016 23
Robustness margins and robustification of nominal explicit MPC
Outline
Problem statement
Robustness margins• Polytopic uncertainty
• Gain margin
• Neglected dynamics
Robustification of explicit solutions
ECC – 29 June 2016 24
Robustness margins and robustification of nominal explicit MPC
Robustification of linear control law
Youla-Kučera parameterisation
Para
mét
risa
tion
de Y
oula
-Kuč
era
Robustification of explicit solutions
Stable transferts
Stabilizing controllers
Youla-Kučera parametrisation
Linear time invariant transfers set
Linear time invariant transfers set
ECC – 29 June 2016 25
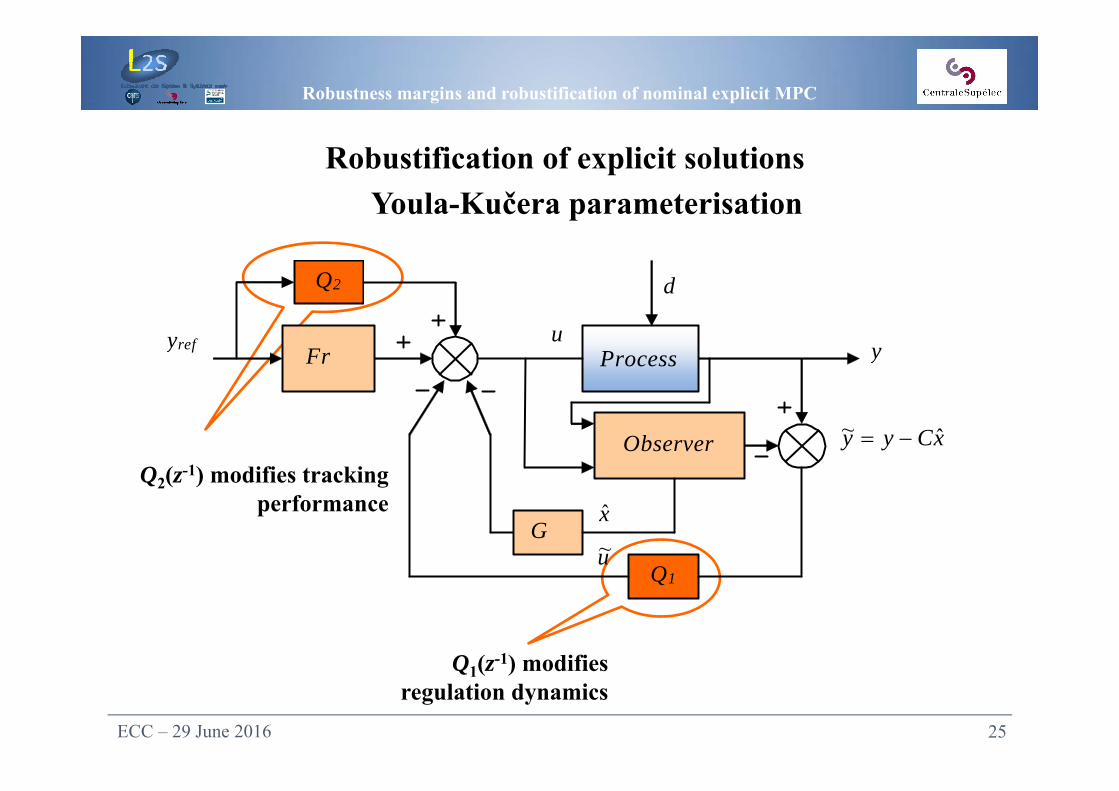
Robustness margins and robustification of nominal explicit MPC
Q2(z-1) modifies tracking performance
Q1(z-1) modifies regulation dynamics
Processu
G
Observer
x̂
y
xCyy ˆ~
Q1
yref
u~
d
Fr
Q2
Para
mét
risa
tion
de Y
oula
-Kuč
era
Youla-Kučera parameterisationRobustification of explicit solutions
ECC – 29 June 2016 26
Robustness margins and robustification of nominal explicit MPC
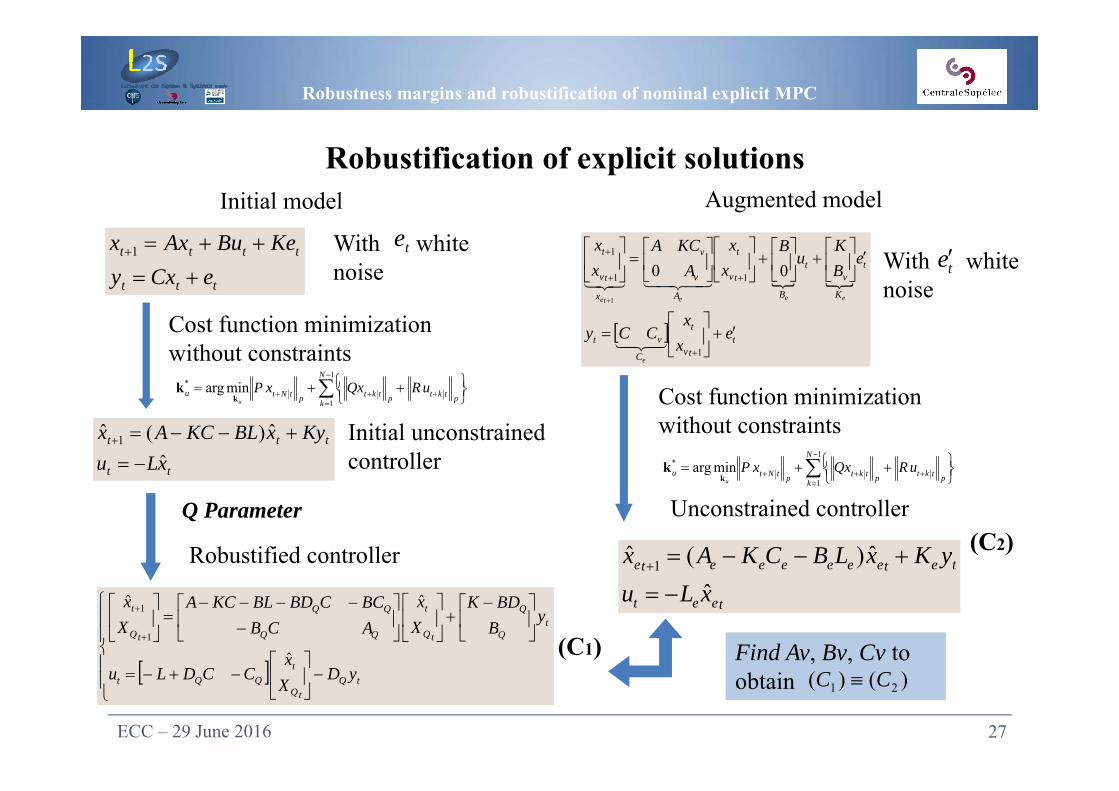
• Youla-Kučera parametrisation can not be directly used to robustify a PWA controller because the continuity of the control law is lost
• The following approach is follow:
1. Robustification of unconstrained controller2. Find the perturbance/noise model associated to the obtained
controller3. Use the new model to modify or the initial PWA controller
- This modification conserves the initial tracking behaviour- The number of partitions is kept, as depends on the constraints
Loi
s exp
licite
s
Robustification of explicit solutions
ECC – 29 June 2016 27
Robustness margins and robustification of nominal explicit MPC
With white noise
Initial model
Cost function minimization without constraints
Q Parameter
ttt
tttt
eCxyKeBuAxx
1
1
1
* minargN
k ptktptktptNtu uRQxxPuk
k
tt
ttt
xLuKyxBLKCAx
ˆˆ)(ˆ 1
Initial unconstrained
controller
tQtQ
tQQt
tQ
Q
tQ
t
tQ
t
yDXx
CCDLu
yB
BDKXx
ACBBCCBDBLKCA
Xx
ˆ
ˆˆ
1
1
Robustified controller
1
1
* minargN
k ptktptktptNtu uRQxxPuk
k
ttv
t
C
vt
t
K
vt
B
tv
t
A
v
v
x
tv
t
exx
CCy
eBK
uB
xx
AKCA
xx
e
eeete
1
11
1
001
teet
teteeeeeete
xLuyKxLBCKAx
ˆˆ)(ˆ 1
Find Av, Bv, Cv to obtain
With white noise
teAugmented model
te
(C1)
(C2)
)()( 21 CC
Loi
s exp
licite
s
Robustification of explicit solutions
Cost function minimization without constraints
Unconstrained controller

ECC – 29 June 2016 28
Robustness margins and robustification of nominal explicit MPC
),(
0
0
0
1
2
vvvv
vQvQ
vvvQ
eQ
CAFHL
CDLC
CBAA
KLD
Non-linear equations :• depends on cost function• Optimisation techniques can be used to solve the non-linear equation system• The existence of the solution haven't been proved yet
Two controllers are equivalents if the following equations are verified :
),( vvv CAF
Loi
s exp
licite
s
Robustification of explicit solutions
ECC – 29 June 2016 29
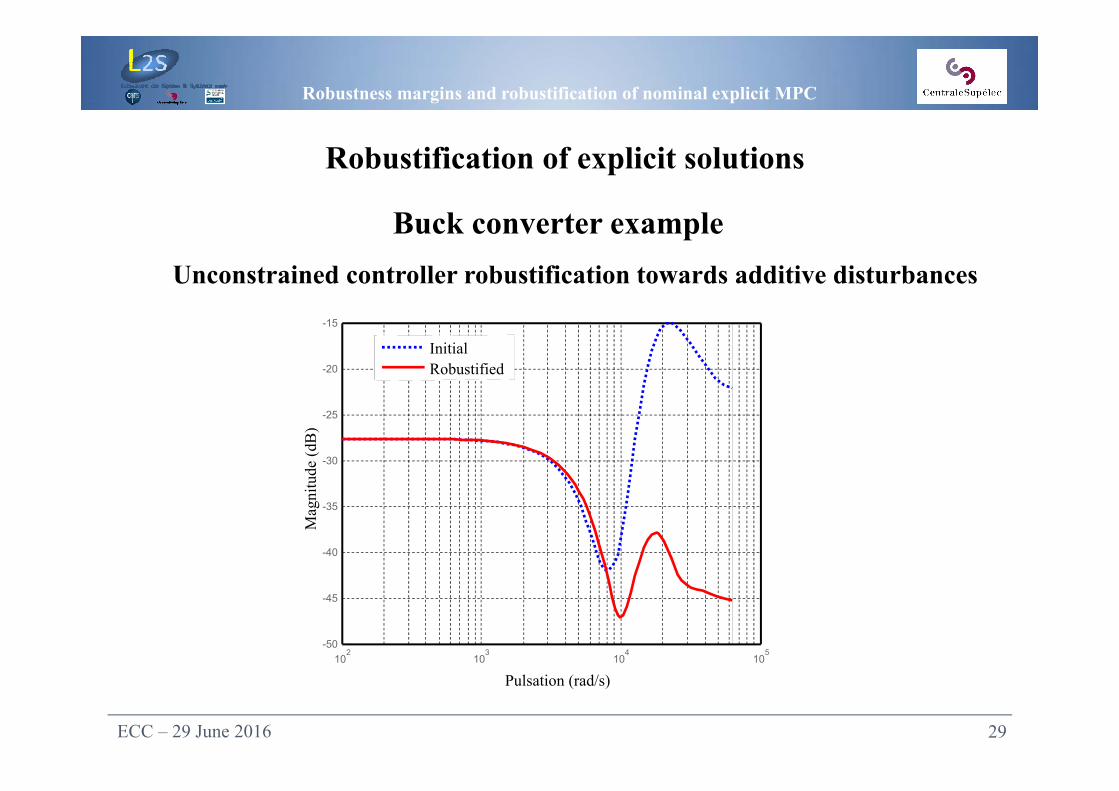
Robustness margins and robustification of nominal explicit MPC
Buck converter example
102
103
104
105
-50
-45
-40
-35
-30
-25
-20
-15M
agni
tude
(dB
)
Pulsation (rad/s)
InitialRobustified
Unconstrained controller robustification towards additive disturbances
Loi
s exp
licite
s
Robustification of explicit solutions
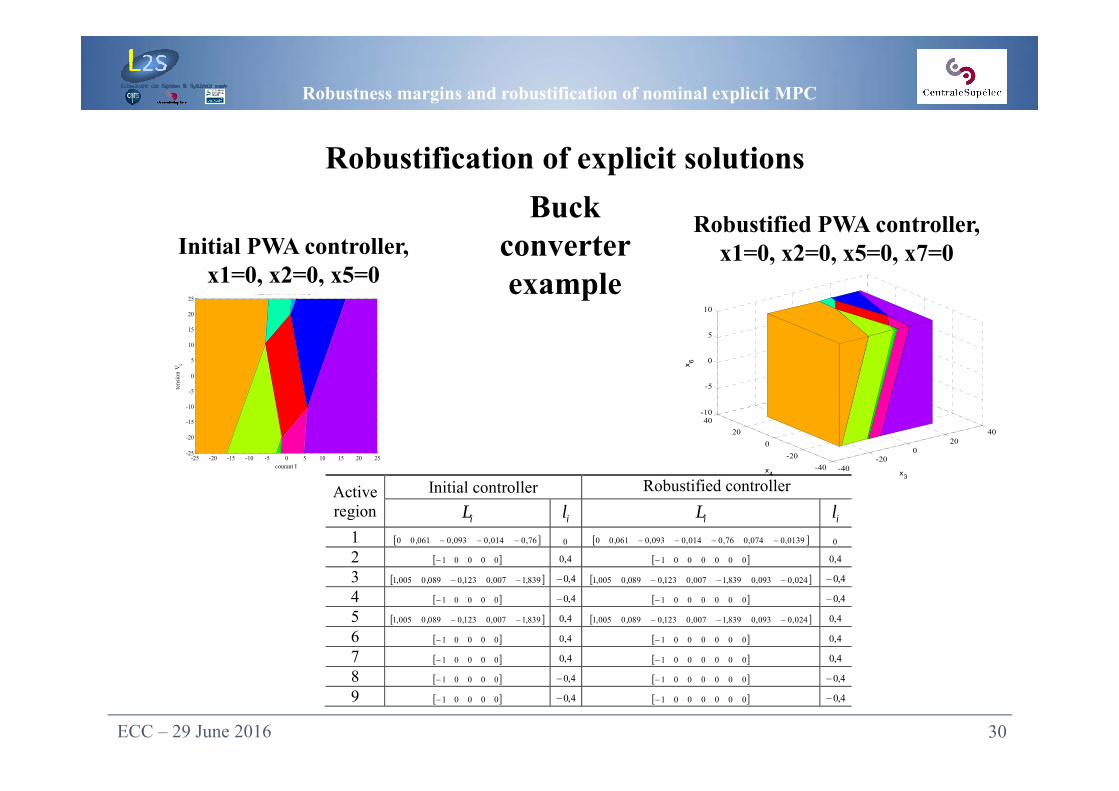
ECC – 29 June 2016 30
Robustness margins and robustification of nominal explicit MPC
-40-20
020
40
-40-20
020
40-10
-5
0
5
10
x3x4
x 6
Active region
Initial controller Robustified controller
iL il iL il 1 76,0014,0093,006100 , 0 0139,0074,076,0014,0093,006100 , 0
2 00001 4,0 0000001 4,0
3 839,1007,0123,00890005,1 , 4,0 024,0093,0839,1007,0123,00890005,1 , 4,0
4 00001 4,0 0000001 4,0
5 839,1007,0123,00890005,1 , 4,0 024,0093,0839,1007,0123,00890005,1 , 4,0
6 00001 4,0 0000001 4,0
7 00001 4,0 0000001 4,0
8 00001 4,0 0000001 4,0
9 00001 4,0 0000001 4,0
-25 -20 -15 -10 -5 0 5 10 15 20 25-25
-20
-15
-10
-5
0
5
10
15
20
25Regions du correcteur pwa
courant I
tens
ion
V c
Robustified PWA controller, x1=0, x2=0, x5=0, x7=0Initial PWA controller,
x1=0, x2=0, x5=0
Loi
s exp
licite
s
Buck converter example
Robustification of explicit solutions
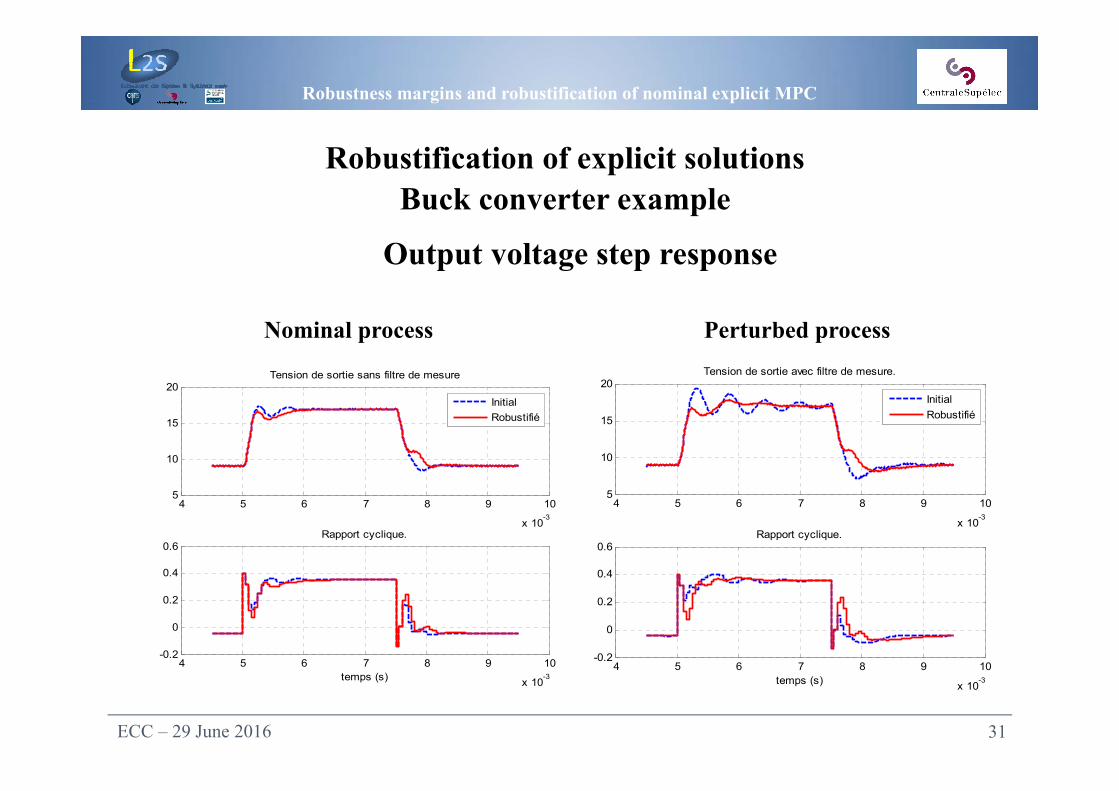
ECC – 29 June 2016 31
Robustness margins and robustification of nominal explicit MPC
4 5 6 7 8 9 10
x 10-3
5
10
15
20Tension de sortie sans filtre de mesure
InitialRobustifié
4 5 6 7 8 9 10
x 10-3
-0.2
0
0.2
0.4
0.6Rapport cyclique.
temps (s)
4 5 6 7 8 9 10
x 10-3
5
10
15
20Tension de sortie avec filtre de mesure.
InitialRobustifié
4 5 6 7 8 9 10
x 10-3
-0.2
0
0.2
0.4
0.6Rapport cyclique.
temps (s)
Output voltage step response
Perturbed processNominal process
Loi
s exp
licite
s
Buck converter exampleRobustification of explicit solutions
ECC – 29 June 2016 32
Robustness margins and robustification of nominal explicit MPC
References
Loi
s exp
licite
s
N. A. Nguyen, S. Olaru, P. Rodriguez-Ayerbe, “Explicit robustness and fragilitymargins for linear discrete systems with piecewise affine control law”,Automatica, 2016, Vol. 68, pp. 334–343.
P. Rodriguez-Ayerbe and S. Olaru, “On the disturbance model in therobustification of explicit predictive control”, International Journal ofSystems Science, 2013, Vol. 44(5), pp. 853–864.





























