Embed Size (px)
Citation preview

Roll–Pitch–Yaw Integrated Robust Autopilot Designfor a High Angle-of-Attack Missile
Seonhyeok Kang∗ and H. Jin Kim†
Seoul National University, Seoul 151-742, Republic of Korea
Jin-Ik Lee‡ and Byung-Eul Jun‡
Agency for Defense Development, Daejeon 305-600, Republic of Korea
and
Min-Jea Tahk§
Korea Advanced Institute of Science and Technology, Daejeon 305-701, Republic of Korea
DOI: 10.2514/1.39812
This paper explores the feasibility of roll–pitch–yaw integrated autopilots for a high angle-of-attack missile.
Investigation of the aerodynamic characteristics indicates strong cross-coupling effects between the motions in
longitudinal and lateral directions. Robust control techniques based on H1 synthesis are employed to design roll–
pitch–yaw integrated autopilots. The performance of the proposed roll–pitch–yaw integrated controller is tested in
high-fidelity nonlinear 5-degree-of-freedom simulations. The proposed controllers are scheduled as a function of
total angle of attack in a linear parameter varying framework with proportional navigation guidance laws. The
integrated controller demonstrates satisfactory performance that cannot be achieved by the controller designed in a
decoupled manner.
Nomenclature
az, ay = normal and lateral accelerationCx � � �Cnr = aerodynamic coefficientsD = reference diameterFx, Fy, Fz = aerodynamic forcesIxx, Iyy, Izz = moments of inertiaM = Mach numberMx,My,Mz = aerodynamic momentsm = missile massQ = dynamic pressureS = reference areap, q, r = roll, pitch, and yaw ratesu, v, w = velocity components along the body axes� = angle of attack� = sideslip angle�r;z;y = roll, pitch, and yaw fin deflections�, �, = Euler angles
I. Introduction
C LASSICAL approaches, which ignore cross-coupling effectsby considering each of the roll, pitch, and yaw axes inde-
pendently, have dominated the tactical missile autopilot design overthe past several decades. For instance, separate proportional andintegral controllers are designed for the roll, pitch, and yaw axes at avariety of linearized conditions and were scheduled by appropriatealgorithms to account for the change of operating points [1]. If theinteraction between each channel is minimal, this three-loop ap-proach for missile autopilots is adequate. However, as the angle of
attack increases, for instance, the cross-coupling effects increasewhich may result in unpredictable performances.
Since the 1980s, development of robust control theory has intro-duced techniques such asH1 and� synthesis which have been usedto design multivariable controllers [2]. These multivariable robustcontrol techniques are particularly beneficial for missile controlapplications. They allow the formulation of the robustness and per-formance requirements with respect to plant uncertainty or distur-bance, and the numerical computation of a controller design problemin a multi-input/multi-output setting. The resulting controller cancover a wider flight envelope and offer systematic treatment of thefully coupled missile dynamics.
However, the robust control techniques are often less intuitive thanthe classical techniques, and there have been only a few reports on theroll–pitch–yaw integrated autopilot design using robust controltheory. A gain-scheduled autopilot for a bank-to-turn (BTT) missileis designed by the H1 loop-shaping approach, to control normalacceleration and bank angle while maintaining the lateral acceler-ation to zero [3]. H1 control is applied to BTT missile autopilotdesign, in combination with neural networks to compensate partiallyunknown dynamics [4]. � synthesis is employed to design separateyaw and roll controllers for a skid-to-turn (STT) missile. Then theperformance of the proposed robust controller is demonstratedagainst nonlinear dynamics [5]. In case of aircraft, a velocity trackingcontroller for a rotorcraft unmanned aerial vehicle (UAV) is designedby H1 control using the fully coupled dynamics [6]. Separate innerand outer loop controllers are employed to complete a UAVmission.Dynamic inversion has been used as the inner loop, andH1 control isused as the outer loop, to achieve robust performance [7].
Although linear robust control techniques are capable of coveringa significant fraction of the flight envelope, it is likely that a singlecontroller will not suffice to satisfy all performance and robustnessrequirements throughout the full envelope, especially for agilemissiles with rapidly changing nonlinear dynamics. One way tocircumvent this difficulty is a linear parameter varying (LPV)controller taking account of the dependence of missile dynamics onthe time varying parameters [8]. LPV models of aircraft have beendeveloped using various approaches, such as Jacobian linearization,state transformation, and function substitution [9]. A linear matrixinequality-based controller has also been designed [10]. For a bank-to-turn missile, a loop-shaping approach [3] has been employed tocontrol the longitudinal acceleration and roll angle. For an STT
Received 16 July 2008; revision received 29 May 2009; accepted forpublication 16 June 2009. Copyright © 2009 by the American Institute ofAeronautics and Astronautics, Inc. All rights reserved. Copies of this papermay be made for personal or internal use, on condition that the copier pay the$10.00 per-copy fee to the Copyright Clearance Center, Inc., 222 RosewoodDrive, Danvers, MA 01923; include the code 0731-5090/09 and $10.00 incorrespondence with the CCC.
∗Graduate Student, School of Mechanical and Aerospace Engineering.†Associate Professor, School of Mechanical and Aerospace Engineering.‡Researcher, Guidance and Control Directorate.§Professor, Department of Aerospace Engineering.
JOURNAL OF GUIDANCE, CONTROL, AND DYNAMICS
Vol. 32, No. 5, September–October 2009
1622
Dow
nloa
ded
by S
EO
UL
NA
TIO
NA
L U
NIV
ER
SIT
Y o
n A
ugus
t 10,
201
5 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/1.3
9812

missile, the � controllers have been scheduled as a function ofdynamic pressure [5]. However, the previous works that employedthese robust control techniques have been usually limited tosimplified or decoupled missile dynamics, or applied to longitudinal[8] or lateral axis [5] only, rather than the roll–pitch–yaw dynamicswith coupling phenomena.
In this research, anH1 LPV controller is designed for a 5-degree-of-freedom (DOF) model of a STT missile, which is obtained byfixing longitudinal velocity in a full 6-DOF nonlinear dynamics. Aninvestigation of the aerodynamic characteristics of the missilejustifies the necessity of the combined longitudinal/lateral designfor high angle-of-attack missiles. A high-fidelity 5-DOF nonlinearsimulation accounting for cross-coupling effects between eachchannel is used to verify the performance and robustness of theproposed controllers. Furthermore, scheduling of the proposed H1controllers is performed for a three-dimensional pursuit scenario,which supports the applicability of the designed autopilot over awideenvelope.
Section II describes the 5-DOF model of a surface-to-air missileused in this research. In Sec. III, we analyze the aerodynamiccharacteristics to observe cross-coupling effects caused by simul-taneous pitch and yaw maneuvering. In Sec. IV, an H1 controldesign problem is formulated for themissile autopilots, followed by adescription of the LPV framework. Section V presents the perfor-mance of these controllers using high-fidelity nonlinear 5-DOFsimulations. Also, LPV controllers are tested in a three-dimensionalengagement scenario to check the full-envelope control capability.Section VI summarizes this paper.
II. Missile Model
We begin with the equations of motion for a missile with anaxisymmetric configuration in the body coordinate frame. It is as-sumed that the missile performs a gliding maneuver after thecombustion period, so the longitudinal velocity u is constant. This isreasonable because 1) the longitudinal velocity u of propulsion-gliding solid propellant missiles is uncontrollable and changesslowly after the combustion period, and 2) the existing characteristicsof themissile, such as nonlinearity and cross-coupling effects amongeach axis, could be mostly maintained [11].
The force and moments equations are
_u� vr � wq � g sin �� Fx=m_v� wp � ur� g sin� cos �� Fy=m_w� uq � vp� g cos� cos �� Fz=m (1)
_p�Mx=Izz _q� f�Izz � Ixx�pr�Myg=Iyy_r� f�Ixx � Iyy�pq�Mzg=Izz (2)
where �u; v; w� are the velocity components and �p; q; r� thecorresponding angular rates. �Fx; Fy; Fz� represent the aerodynamicforces, �Mx;My;Mz� the aerodynamic moments, ��; �; � the Eulerangles, �Ixx; Iyy; Izz� the moment of inertia, and m the missile mass.
The aerodynamic forces and moments are determined by
Fx ��QS�Cx � Cxb� �maT Fy �QSCy Fz �QSCz (3)
Mx �QSDfCl � �D=2Vm�Clppg
My �QSDfCm � �D=2Vm�Cmqqg
Mz �QSDfCn � �D=2Vm�Cnrrg (4)
where Q is the dynamic pressure, S the reference area, D thediameter, aT the thrust, and Vm the total velocity of the missile. Theaerodynamic coefficients, Cx; . . . ; Cnr are extracted from anaerodynamic module that takes into account the current values ofaltitude,Mach numberM, angle-of-attack �, sideslip angle�, and findeflection angle �.
III. Model Analysis
The aerodynamic coefficients are extracted from an aerodynamicmodule based on an experimental database according to altitude,Mach number M, angle-of-attack �, sideslip angle �, and controldeflection angle �, and used to calculate total forces and moments.
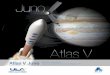
The asymmetric airflow on control surfaces for a cruciform tail-controlled missile can generate induced roll moments, which bringabout control difficulties, unless the angle of attack equals the side-slip angle. It is difficult to accurately estimate the induced rollmoment forwhich the extent is greatly affected by the angle of attack,Mach number, and fin configurations. When the control inputs arezero, the variation of the roll moment coefficient appears to be a trig-onometrical functionwith the period of 90 deg in Fig. 1a, showing thepeak values at �� 22:5 and 67.5 deg. This corresponds to roughly15% of the total roll moments generated by roll control inputs. Thesmaller the Mach number is, the larger the peak value becomes.Accordingly, not only can the consequence of these effects dete-riorate the performance of missiles, but they can give rise to unex-pected dynamic characteristics. Figure 1b shows the induced rollmoment coefficient as� varies from 0 to 20 deg,with a constant bankangle at 0, 5, 10, and 20 deg. It can be seen that the coefficient Cl islarge in the low Mach number and large sideslip angle region.
The effects of roll control inputs on themissile model are shown inFigs. 1c and 1d. Figure 1c shows the plots ofCl versus roll control �rat each value of sideslip angle and Mach number, when �� 0 deg.Figure 1d shows the similar plots when �� 20 deg. It should benoted that the roll moments can be generated without roll controlinputs when the angle-of-attack � is nonzero. Especially, when themissile maneuvers in the lowMach number and high angle-of-attackregion, this phenomenon is noticeable. These cross-coupling effectscaused by simultaneous pitch and yawmaneuveringmake the controlproblemmore difficult, and our objective is to design a controller thatcan formally address this issue so that the guidance commandstracking performance are improved.
IV. Controller Design
This section addresses the problem formulation for an integratedroll–pitch–yaw autopilot and LPV framework.
A. Linearization of the Nonlinear Missile Dynamics
The H1 synthesis of the missile autopilot system begins with thelinearization of the nonlinear missile dynamics of Eqs. (1) and (2).Then we arrive at the following linearized 5-DOF model :
_w
_q
_v
_p
_r
266666664
377777775�
Zw Zq Zv Zp 0
Mw Mq Mv Mp 0
Yw 0 Yv Yp Yr
Lw 0 Lv Lp 0
Nw 0 Nv Np Nr
266666664
377777775
w
q
v
p
r
266666664
377777775
�
Z�z 0 0
M�z0 0
0 0 Y�y
L�z L�r L�y
0 0 N�y
266666664
377777775
�z
�r
�y
264
375 (5)
It is assumed that all state variables are measurable. From Eq. (5), thelongitudinal and lateral accelerations are given by az � zw�x�w�zv�x�v� z�z �x��z and ay � yw�x�w� yv�x�v� y�y�x��y, respec-tively, where x� �w q v p r �T is the state vector.
Because of the largest value ofL�r , which is about 100 times largerthan other coefficients in Eq. (5), even the small aileron deflectionscan greatly affect the roll-rate p that leads to a change of motions inpitch and yaw channels represented by Mp and Np, respectively.Furthermore, if we ignore these cross-coupling effects, the equations
KANG ETAL. 1623
Dow
nloa
ded
by S
EO
UL
NA
TIO
NA
L U
NIV
ER
SIT
Y o
n A
ugus
t 10,
201
5 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/1.3
9812

of longitudinal motions can be represented by the first two columnsand rows in Eq. (5). And the lateral motions are described by the lastthree columns and rows. Thus, the effects of the other coefficientsZv,Zp,Mv,Mp,Yw,Lw, andNw are neglected in the decoupled design. Itcan be expected that the performances of the control system designedwith the decoupled equations of motions are not representative ofthose of the actual nonlinear systems. It can be also known bycomparing the eigenvalues between coupled and decoupled dynamicsystems. The aim of this study is to control this effect, which leads tothe fast unstable motions in roll channels and makes the accelerationcontrol problem more difficult.
B. H1 Synthesis for the 5-Degree-of-Freedom Missile Dynamics
Requirements to stabilize roll channel and to maintain the desirednormal acceleration in the presence of disturbances and sensor noiseare formulated as a H1 control problem [12]. Figure 2 shows theinput multiplicative uncertainty model, where G is the nominalmodel,W� is aweighting functionwhich indicates the relativemodeluncertainty over frequency, and � represents unmodeled dynamicsassumed to be stable and unknown, except for the norm conditionk�k1 < 1.
In this study, the input multiplicative uncertainty weight W� ischosen to beW� � w��s�I3, with a scalar valued function w��s�:
w� � 50s� 100
s� 10; 000(6)
The particular uncertainty weight indicates that at low frequency,there is potentially a 50% modeling error, and at a frequency of170 rad=s, the uncertainty in themodel is up to 100%, and gets largerat higher frequencies.
A block diagram of the closed-loop system is shown in Fig. 3, withreference signal rc � � az ay � �T , measurement noise n, controlinputs u� � �z �r �y �T , plant outputs y1 � �az ay � �T , y2��p q r �T , and two weighted outputs z1 and z2. The plant Gu is amissile model with input multiplicative uncertainty and K is thecontroller to be designed. The weights Wi, Wn, and Wr indicatingimportance and frequency content of set points and noise signalswere chosen as Wi�s� � I3, Wn�s� � 0:001 I3, and Wr�s� � I3.We only consider measurement noise here, because inputdisturbances are already included in Gu. The performance weightWe and control weightWu reflecting the desired frequency content ofthe error (y1 � rs) and the control signals u were also chosen as
We�s� � diag
��s=
�������M1
np
�w1�n
�s� w1
����Anp�n I2;
�s=�������M2
np
�w2�n
�s� w2
����Anp�n
�(7)
Wu�s� � 10�5 I3 (8)
ββββ
αα
αααα
φ φ
βββ
δδ
βββ
δδ
a) Cl versus φ b) Cl versus α
c) Cl versus δr with α = 0 deg d) Cl versus δr with α = 20 deg
Fig. 1 The plot of Cl at (i) M � 1:5, (ii) M � 2:0, (iii) M � 2:5, and (iv) M � 3:0.
Fig. 2 Multiplicative dynamic uncertainty model.
1624 KANG ETAL.
Dow
nloa
ded
by S
EO
UL
NA
TIO
NA
L U
NIV
ER
SIT
Y o
n A
ugus
t 10,
201
5 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/1.3
9812

where M1 � 0:15, M2 � 0:5, w1 � 30, w2 � 1, A� 10�4, andn� 2. It is essential that the elements of the performance weightWe
be independently endowed with requirements for maneuveringaccelerations and an Euler angle. Finding appropriate weightingfunctions is a crucial step in robust controller design, which usuallyneeds a few trials [13].
MATLAB Robust Control Toolbox is used for controllersynthesis. Typical loop shapes can be seen from the singular values ofthe closed-loop transfer function matrices from the reference com-mand to each of the two outputs, that is, error and output. These twotransfer function matrices, which are known as sensitivity functionand complementary sensitivity function, are defined as follows:
S�s�≜ �I � L�s���1 (9)
T�s�≜ L�s��I � L�s���1 � I � S�s� (10)
where loop transfer function matrix L�s� �G�s�K�s�. Figure 4shows the singular value plot of L�s�. It shows the good trackingperformance in low-frequency range and good robustness and goodnoise rejection at high-frequency range.
C. Linear Parameter Varying Controller Formulation
To implement the proposed roll–pitch–yaw integrated autopilot,we represent the missile dynamics augmented with the weightingfunctions using LPVof the following form:
_xzy
24
35� A���t�� B1���t�� B2���t��
C1���t�� D11���t�� D12���t��C2���t�� D21���t�� D22���t��
24
35 x
wu
24
35 (11)
where ��t� is a scheduling parameter and the signals are x, the statevariables, u the control inputs, y� � rs ym �T the measured outputs,z� � z1 z2 �T the error, andw� � rc n �T the exogenous signals inthe setting of Fig. 3. By assuming the system matrices in Eq. (11) tobe affine in�, usually,� 2 P <m whereP is a polytope in<m, theybelong to the polytope S defined by
S :� Co
8>><>>:
Ai B1i B2i
C1i D11i D12i
C2i D21i D22i
0@
1A; i� 1; 2; . . .
9>>=>>; (12)
where Ai; B1i; . . . ; D22i denote the values of the matricesA���; B1���; . . . ; D22��� at the vertices of the parameter polytopeP.Cof�g indicates the convex hull of a finite number of matrices. It isassumed that the system matrices B2���, C2���,D12���, andD21���are parameter independent, and that, in addition, there is no directeffect from the input to the measurement output, that is,D22��� � 0.Following these assumptions, the values of the matrices of the LPVcontroller can be written as
K��� �Xri�1
�iKi �Xri�1
�iAKi BKiCKi DKi
� �(13)
where (�1; �2; . . . ; �r) is any solution to the convex decompositionproblem
��Xri�1
�i�i
The problem is then to find an LPV controller K��� satisfyingEq. (13) and such that 1) the closed-loop system is stable for alladmissible parameter trajectories ��t�, and 2) the worst-case closed-loop rms gain from w to z does not exceed some level � > 0.
Explicit formulas for the controller Ki can be obtained by con-sidering the mapping from exogenous inputs w and control inputs uto controlled outputs z and measured outputs y
zy
� �� P�s� w
u
� �� P11�s� P12�s�
P21�s� P22�s�
� �wu
� �(14)
u� K�s�y (15)
With these formulations, theH1 optimal control problem is to find astabilizing output feedback law u� K�s�y such that the closed-looptransfer function Fl�P;K� from w to z satisfies
kFl�P;K�k1 < � (16)
Given any proper controller K�s� of realization
K�s� �DK � CK�sI � AK��1BK (17)
a realization of the closed-loop transfer function from w to z can beobtained as
Fl�P;K� �Dcl � Ccl�sI � Acl��1Bcl (18)
where
Acl �A� B2DKC2 B2CK
BKC2 AK
" #Bcl �
B1 � B2DKD21
BKD21
" #
Ccl � �C1 �D12DKC2 D12CK � Dcl � �D11 �D12DKD21�
Using the bounded real lemma, it can be shown that the conditions forthe internal stability and the stabilizing controller Eq. (16) are equiv-alent to the feasibility of the following linear matrix inequality [14]:
ATclXcl � XclAcl XclBcl CTclBTclXcl ��I DT
cl
Ccl Dcl ��I
0@
1A < 0 (19)
for some symmetric matrixXcl > 0. This synthesis can be reduced tofinding two symmetric positive definite matrices R and S such that
N R 0
0 I
� �TAiR� RATi RCT1i B1iC1iR ��I D11i
BT1i DT11i ��I
!N R 0
0 I
� �< 0 (20)
N S 0
0 I
� �TAiS� SATi RBT1i C1iB1iS ��I D11i
CT1i DT11i ��I
!N S 0
0 I
� �< 0 (21)
R II S
� �� 0 (22)
where N R and N S denote basis of the null space of �BT2 ; DT12� and
�C2; D21�, respectively [8,15,16]. The bounded real lemma matrixXcl can be derived by solving
XclI R0 MT
� �� S I
NT 0
� �(23)
Two full-column rank matricesM, N such thatMNT � I � RS canbe calculated by singular value decompositon, that is, U�VT�
Fig. 3 Interconnection structure for the integrated autopilot.
KANG ETAL. 1625
Dow
nloa
ded
by S
EO
UL
NA
TIO
NA
L U
NIV
ER
SIT
Y o
n A
ugus
t 10,
201
5 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/1.3
9812

I � RS. Here, U and V are unitary matrices, � is a diagonal matrixwith nonnegative entries,M �U�, and N � V.
V. Simulation Results
In this section, the roll–pitch–yaw integrated controller is tested innonlinear 5-DOF simulations accounting for cross-coupling effectsbetween the longitudinal and lateral directions. LPV controllers areemployed with proportional navigation guidance (PNG) lawsoptimal for a constant velocity missile [17].
A. Implementation of the Linear Parameter Varying Controller
To test the effectiveness of theLPVcontrollers in 5-DOFnonlinearsetup, two linear time-invariant controllers in Eq. (11) are designed atM� 2:0, az ��10g, ay � 10g, and M � 2:0, az ��20g, ay�20g, respectively. For various changes in the scheduling variables,which is a total angle of attack in this study, a sequence ofacceleration step commands is imposed on the missile trimmed atM� 2:0, az ��15g, and ay � 15g. The initial step command wasaz ��5g, ay � 5g, and �� 0 deg, followed by the second stepcommand of az � 5g, ay ��5g, and �� 0 deg. The simulationresults under these LPV controllers are shown in Fig. 5. It indicatesthat the LPV controller provides adequate tracking performance ofthe guidance commands and smooth coverage of a wider flightenvelope rather than only the vicinity of each design point. The rollresponse was designed to be faster than pitch and yaw channels forstabilization. If the initial roll response is not stabilized fast enough, itcan cause difficulty in stabilizing the acceleration channels due tovarious cross-channel coupling terms that involve the roll rate, suchas aerodynamic, control, kinematic, and inertial couplings.
We note that the controller designed based on the decoupledlongitudinal and lateral dynamics fails to achieve stable responsesagainst the coupled dynamics. Each of the separate controllersdesigned based on decoupled longitudinal/lateral dynamics (stated inSec. IV.A) shows the satisfactory tracking performance against thelongitudinal/lateral channel. Figures 6a and 6b show the closed-loopeigenvalue locations and the zoomed-in view, respectively. In thosefigures, triangles represent the closed-loop eigenvalues of thelongitudinal channel only, and circles represent the closed-loopeigenvalues of the lateral channel only. They are all in the open lefthalf-plane. However, when those controllers are combined and
−500
−400
−300
−200
−100
0
100
200
300M
agni
tude
(dB
)
Frequency (rad/s)10−5 1050
Fig. 4 Singular value plot for loop transfer function L� GK.
0 1 2 3 4-10
-505
1015
φφ φφ(d
eg)
Time (s)
0 1 2 3 4-10
-5
0
5
100 1 2 3 4
-10
-5
0
5
10
a y(g)
a z(g
)
0 1 2 3 4-60
-30
0
30
60
r(d
eg/s
ec)
Time (s)
0 1 2 3 4-60
-30
0
30
60
q(d
eg/s
ec)
0 1 2 3 4-200-100
0100200300
p(d
eg/s
ec)
0 1 2 3 40
5
10
δδ δδ y(d
eg)
Time (s)
0 1 2 3 4-2
-1
0
1
2
δδ δδ r(d
eg)
0 1 2 3 40
5
10
δδ δδ z(d
eg)
0 1 2 3 4
6
8
10
12
14
16
tota
l αα αα
deg
Time (s)
a) Step responses b) State variables
c) Control inputs used d) Total angle of attack
Fig. 5 Nonlinear 5-DOF simulation results under LPV controllers.
1626 KANG ETAL.
Dow
nloa
ded
by S
EO
UL
NA
TIO
NA
L U
NIV
ER
SIT
Y o
n A
ugus
t 10,
201
5 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/1.3
9812

applied to the overall coupled dynamics, there are two unstableclosed-loop eigenvalues, as shown with crosses in Figs. 6a and 6b.
B. Three-Dimensional Engagement
A three-dimensional pursuit-evasion scenario is engaged to testthe proposed autopilot with a PNG law [17]. The missile is initiallytrimmed at az ��10g and ay � 10g and is assumed to have �7g
acceleration limits in longitudinal and lateral motions, respectively.The evader dynamics considered in this study are 3-DOF point-massmodel [18]. The target simply performs a �3g pull-up and 3gbreakaway maneuvers, with the negative sign indicating the upwarddirection. The initial velocity is set to be 680 m=s, starting fromthe origin with � � 0, and � 0 deg. Initial location of the targetis (3500,2800,1500), with the velocity 280 m=s and � ��10, � 180 deg.
−15 −10 −5 0x 10
5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2x 10
6
Re
Im
LongitudinalLateralLongitudinal+Lateral
−40 −20 0 20 40 60−60
−40
−20
0
20
40
60
Re
Im
a) Eigenvalue plot b) Zoomed-in view
Fig. 6 Eigenvalues for closed-loop system.
01000
2000
3000
0
500
1000
1500
0
1000
2000
3000
MissileTarget
Hei
ght(
m)
Crossrange (m
)Downrange (m)
0
5
10
15
δδ δδ y(d
eg)
Time (s)
-2
0
2
δδ δδ r(d
eg)
420
420
420-5
0
5
10
δδ δδ z(d
eg)
0 2 4-50
0
50
100
r(d
eg/s
ec)
Time (s)
0 2 4-100
-50
0
50
q(d
eg/s
ec)
0 2 4
-600
-300
0
300
p(d
eg/s
ec)
420-15
-10
-5
0
5
10
15
a y(g
)
Time (s)
20 4-15
-10
-5
0
5
10
15
a z(g
)
commandedactual
a) 3-D trajectory b) Normal acceleration
c) State variables d) Control inputs used
Fig. 7 Three-dimensional engagement.
KANG ETAL. 1627
Dow
nloa
ded
by S
EO
UL
NA
TIO
NA
L U
NIV
ER
SIT
Y o
n A
ugus
t 10,
201
5 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/1.3
9812

The results of the scenario are shown in Fig. 7. Figure 7a showsthree-dimensional trajectories of the missile and target. Thelongitudinal and lateral acceleration histories and guided commandsare also shown in Fig. 7b. As we expected, a slight performancedegradation caused by the cross-coupling effects among roll, pitch,and yaw channels at about 4 s is noticeable; it nevertheless indicatesthat the proposed autopilot exhibits good guidance tracking perfor-mance. The state variables and control inputs used in this simulationare shown in Figs. 7c and 7d, respectively. In Fig. 5b, the initialoscillations and large angular rate in a roll channel indicate sensitivityto the rapid changes in guidance commands. Adjusting theweightingfunctions in the design procedure may suppress both features.However, reducing these effects in the roll channel can slowdown theresponse in other channels. It could then give rise to a reduced agility,resulting in an unpredictable performance degradation.
VI. Conclusions
In this work, following investigations of the aerodynamiccharacteristics for a surface-to-air missile, which reveal strong cross-coupling effects between the longitudinal and lateral dynamics, wedesigned roll–pitch–yaw integrated autopilots for the pitch/yawacceleration and roll angle tracking problem. The proposed autopilotbased on theH1 control techniques is evaluated in a fully nonlinear5-DOF simulation. The results showed that the proposed controllerperforms well in terms of the accurate tracking of the command aswell as stabilizing the longitudinal and lateral motions when thenonlinearities and cross-coupling effects dominate the missiledynamics. The designed controllers are scheduled as a function oftotal angle of attack in the LPV framework to examine the full-envelope control capability. These LPV controllers prove the wide-envelope applicability of integrated autopilots beyond individualdesign points. Furthermore, the 3-D engagement employing PNGlaws shows that the methodology used in this work can be applied tothe challenge of the tactical missile autopilots.
Acknowledgments
This research was sponsored in part by the Agency for DefenseDevelopment under theGrant ADD-09-01-03-03 and by the Instituteof Advanced Aerospace Technology at Seoul National University,Korea.
References
[1] Reichert, R. T., “Dynamic Scheduling of Modern-Robust-ControlAutopilot Designs for Missiles,” IEEE Control Systems Magazine,Vol. 12, No. 5, 1992, pp. 35–42.doi:10.1109/37.158896
[2] Doyle, J. C., Glover, K., Khargonekar, P. P., and Francis, B. A., “State-Space Solutions to Standard H2 and H1 Control Problems,” IEEE
Transactions on Automatic Control, Vol. 34, No. 8, 1989, pp. 832–846.doi:10.1109/9.29425
[3] Hiret, A., Duc, G., Friang, J. P., and Farret, D., “Linear-Parameter-
Varying/Loop-ShapingH1 Synthesis for a Missile Autopilot,” Journalof Guidance, Control, and Dynamics, Vol. 24, No. 5, 2001, pp. 879–886.doi:10.2514/2.4821
[4] Lin, C. K., and Wang, S. D., “An Adaptive H1 Controller Design forBank-to-TurnMissiles Using Ridge Gaussian Neural Networks,” IEEETransactions onNeuralNetworks, Vol. 15,No. 6, 2004, pp. 1507–1516.doi:10.1109/TNN.2004.824418
[5] Buschek, H., “Full Envelope Missile Autopilot Design Using GainScheduled Robust Control,” Journal of Guidance, Control, and
Dynamics, Vol. 22, No. 1, 1999, pp. 115–122.doi:10.2514/2.4357
[6] Voorsluijs, G., and Mulder, J., “Parameter-Dependent Robust Controlfor a Rotorcraft UAV,” AIAA Paper 2005-6407, Aug. 2005.
[7] Sadraey, M., and Colgren, R., “Robust Nonlinear Controller Design fora Complete UAV Mission,” AIAA Paper 2006-6687, Aug. 2006.
[8] Apkarian, P., Gahinet, P., and Becker, G., “Self-ScheduledH1 Controlof Linear Parameter-Varying Systems: A Design Example,”Automatica, Vol. 31, No. 9, 1995, pp. 1251–1261.doi:10.1016/0005-1098(95)00038-X
[9] Marcos, A., and Balas, G., “Development of Linear-Parameter-VaryingModels for Aircraft,” Journal of Guidance, Control, and Dynamics,Vol. 27, No. 2, 2004, pp. 218–228.doi:10.2514/1.9165
[10] Natesan, K., Gu, D., and Postlethwaite, I., “Design of StaticH1 LinearParameter Varying Controllers for Unmanned Aircraft,” Journal of
Guidance, Control, and Dynamics, Vol. 30, No. 6, 2007, pp. 1822–1827.doi:10.2514/1.31283
[11] Jun, B., “A Nonlinear Roll Autopilot Based on 5-DOF Models ofMissiles,” Proceedings of the 17th IFAC World Congress, IFAC,Oxford, U.K., July 2008.doi:10.3182/20080706-5-KR-1001.1355
[12] Skogestad, S., and Postlethwaite, I., Multivariable Feedback Control:
Analysis and Design, 2nd ed., Wiley, Hoboken, NJ, 2005.[13] Gu, D. W., Petkov, P. Hr., and Konstantinov, M. M., Robust Control
Design with MATLAB, Springer, New York, 2005.[14] Gahinet, P., “Explicit Controller Formulas for LMI-Based H1
Synthesis,” Proceedings of the American Control Conference, Vol. 3,July 1994, pp. 2396–2400.doi:10.1109/ACC.1994.734988
[15] Becker, G., and Packard, P., “Robust Performance of LinearParametrically Varying Systems Using Parametrically DependentLinear Feedback,” Systems and Control Letters, Vol. 23, No. 3, 1994,pp. 205–215.doi:10.1016/0167-6911(94)90006-X
[16] Apkarian, P., and Adams, R. J., “Advanced Gain-SchedulingTechniques for Uncertain Systems,” IEEE Transactions on Control
Systems Technology, Vol. 6, No. 1, 1998, pp. 209–228.doi:10.1109/87.654874
[17] Jeon, I., Lee, J., andTahk,M., “Impact-Time-Control Guidance Law forAnti-Ship Missiles,” IEEE Transactions on Control Systems
Technology, Vol. 14, No. 2, 2006, pp. 260–266.doi:10.1109/TCST.2005.863655
[18] Jung, B., Kim, K., and Kim, Y., “Guidance Law for Evasive AircraftManeuvers Using Artificial Intelligence,” AIAA Paper 2003-5552,Aug. 2003.
1628 KANG ETAL.
Dow
nloa
ded
by S
EO
UL
NA
TIO
NA
L U
NIV
ER
SIT
Y o
n A
ugus
t 10,
201
5 | h
ttp://
arc.
aiaa
.org
| D
OI:
10.
2514
/1.3
9812