Embed Size (px)
Citation preview

ITRS: Tripods ‘falling’ over ↑↗→ © Richard Delaney, RopeLab, 2015 1
Rescue tripods keep
‘falling
over’
Richard Delaney, RopeLab
ITRS presentation, Portland, OR, 2015
Natural, improvised, and purpose built high directionals are used to manage loads over edges and
through openings. They can make otherwise impossible tasks possible.
There are now many proprietary solutions with almost limitless configurations that are being used
by rope technicians for access, standby rescue, technical rescue, and load management. High
directionals take many forms but the most common is the tripod. Tripods are deceptive because
they will stand freely and there is the temptation to assume that, if it’s standing up, it should work
fine.
Unfortunately, there seems to be an increase in the number of incidents where these devices are
‘falling over’ in situations supporting live loads. These near misses are rarely reported but
informal discussions lead me to believe that this is happening at least once every six months
somewhere in the world. This rate of incident is unacceptable.
These incidents are never the result of equipment failure. High directionals fall over
because people fail to understand and anticipate the forces acting on the system.

ITRS: Tripods ‘falling’ over ↑↗→ © Richard Delaney, RopeLab, 2015 2
The last decade has seen significant focus and effort put into improving the back-end of rescue
systems. Most organisations now use twin rope systems and are aware of the attention needed to
manage these two ropes through appropriate devices during both lowering and raising operations.
The “way it’s always been done” involves applying this general rubber stamp to a particular
situation:
- Identify the location of the victim.
- Dispatch a first responder to assess the situation below.
- Choose an appropriate place to put the tripod.
- Establish and anchor system
- Set up the rope based system ready for a two person raise/lower
- Lower a rescue litter and responder using the tripod/rope system
- Raise the Attendant/Patient/Litter using the tripod/rope system
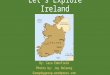
It often looks something similar to the following image.
It is now time to shift the focus to the front end and analyse every assumption, component, and
technique to see if we can reduce the both the likelihood and consequence of a high directional
failure.
The following discussion will start at the load and work up through a few key areas:
- The weight of the rescue load
- Load and litter rigging
- Tripods and other Artificial High Directionals (AHDs)

ITRS: Tripods ‘falling’ over ↑↗→ © Richard Delaney, RopeLab, 2015 3
1. The Rescue Load
Many operators have become focused on the need to float an attendant plus litter ‘rescue load’ up,
in, and be placed gently down on safe, stable ground.
Perhaps we should revisit the reasoning behind defaulting to inclusion of an attendant in every
operation.
The traditional justifications for including a litter attendant are:
- Providing medical assistance to the patient.
- Managing physical obstructions to the path of the litter.
Medical Assistance
Specific medical concerns are valid, however these should be assessed for each
operation. Opportunities for mid-haul treatments like CPR or defibrillation are not realistic.
Perhaps the only interventions requiring direct assistance are intubation and bag-ventilation.
Litter management
If the litter is free-hanging for its entire journey, then it may not require any guidance. This is
unlikely so normally an attendant will ‘steer’ the litter past specific obstacles.
There are certainly options other than an in-riding/out-riding litter attendant however these are
rarely considered. These others include:
- a vertically mobile attendant on separate ropes.
- the use of tag lines.

ITRS: Tripods ‘falling’ over ↑↗→ © Richard Delaney, RopeLab, 2015 4
Single person Rescue Load
If the attendant can be removed from the ‘Rescue Load’ then the benefits include:
- A lighter load.
- Less strain on all components.
- An easier haul – which may then be faster and result in less exposure to hazards.
- Reduced likelihood of AHD instability.
Even if conditions dictate inclusion of an attendant with the load then the benefits of removing
the attendant for edge transitions cannot be ignored. One of the hardest things to monitor is the
potential movement of the net (or resultant) force on the AHD. Moving resultants are most likely
to occur as the load is brought up and over the edge.

ITRS: Tripods ‘falling’ over ↑↗→ © Richard Delaney, RopeLab, 2015 5
One or two ropes through the AHD?
Common practice seems to involve running one rope through the AHD and having the second on
an adjustable set-of-fours. This second rope is normally set low but it can be raised during edge
transitions.
The justification for raising the second rope is based on a critical assessment of comparisons of
the likelihood of either AHD failure or human error with rope management at the back end of the
system.
The assumption has been that human error is more likely than tripod failure and thus the second
rope is often raised during the edge transition. If the second rope is not elevated and there is a
rope management error, then the litter can fall across the attendant’s thighs as it pushes them back
over the edge.
With so many tripod ‘failures’, this reasoning must be re-questioned.
It is not necessary to go too far down this path as there is a far safer solution. If the load did
actually require an attached attendant then, as a priority, the attendant should be removed from
the system BEFORE the edge transition. If this happens, and the bridle is not excessive, then
there is absolutely no reason to elevate the second rope.

ITRS: Tripods ‘falling’ over ↑↗→ © Richard Delaney, RopeLab, 2015 6
Non-live loads
If moving a non-live load, then it becomes difficult to justify the inclusion of a directly-attached
litter attendant.
Body recoveries are an unfortunate part of rescue work and it is worth describing a method
frequently used in the Blue Mountains of Australia. A fundamental premise with this method is
that this is recovery, not rescue, and that hazard exposure to rescuers must be minimised.
The team dispatches a responder who descends using two ropes. On reaching and assessing the
scene the preferred recovery is performed using a simple tensioned track line established using
the responder’s ropes.
Once the recovery is complete, the responder either descends to the cliff base to walk out or
ascends the original ropes.
Summary
It is always important to consider options for lightening the rescue load. Direct attachment of an
attendant to the litter should not be the default response. Having made this points, it is still
critical that teams understand and train for those rare occasions where two person loads are
required.

ITRS: Tripods ‘falling’ over ↑↗→ © Richard Delaney, RopeLab, 2015 7
2. Litter Rigging
Many teams train with tall Artificial High Directionals (AHDs). This familiarity and comfort
with tall AHDs removes the necessity to focus on efficient rigging and we often see litters rigged
with bridle heights exceeding 1m. If minimising AHD height becomes a priority, then the
minimum height is in fact dictated by the combined package height of litter, bridle, and
attachment to rope.
The Confined Space AHD needs to be tall enough to facilitate the management of a vertical load
and thus needs a minimum clearance of 2m. Teams often only have access to generic Confined
Space AHDs and thus don’t normally give much consideration to load height.
Litter Bridles
There are many different ways to attach a litter to a rope based rescue system and these range
from off-the-shelf clip-and-go bridles to custom rigs tied from components during the job.
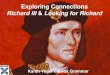
The picture below shows two common adjustable bridles. The total package consists of the litter,
bridle, and attachment point. On the left is what is often referred to as an AZ Tri-Bridle and has
been taught far and wide by Reed Thorne. The AZ Tri-Bridle typically results in a compact
package height of 0.65m. On the right is a standard adjustable webbing based solution which is
often set with a package height of 1.55m. Note that these are both adjustable but the shortest
height the webbing bridle and litter package can achieve is 0.85m.

ITRS: Tripods ‘falling’ over ↑↗→ © Richard Delaney, RopeLab, 2015 8
Note that a shorter bridles may increase the potential to ‘fold’ weaker litters.
The horizontal component of force pulling the head and foot towards each other increases with
the internal bridle angle. Be sure that your litter is designed to handle such forces if rigging tight
bridles.
The AZ Tri-Bridle has added flexibility with a set-of-fours at the foot end of the litter, which
means the attendant can adjust the litter pitch mid-operation.

ITRS: Tripods ‘falling’ over ↑↗→ © Richard Delaney, RopeLab, 2015 9
Attaching the Rope
There are many ways to attach the bridle to the rope system. Common options include tying
straight in or using some master-point with knots and connectors. A webbing based bridle
typically uses a master point, while the AZ Tri-Bridle focal point is formed with a direct tie-in.
A direct tie-in saves approximately 200mm in height, however it is very important that an
appropriate knot is used. When a knot is loaded in this way it is commonly referred to as ‘ring
loading’, meaning it is being loaded in multiple directions. Many common knots become
unstable when subjected to ring loading.
Ring loading of bowline knots
The bowline is clearly the most compact knot for the bridle focal point but, to be used in this way,
it must be stable when ring loaded. Two possible bowline options here are:
Traditionally, we have used the “inside tail” bowline (with a secured working end) for tying
around anchors and into the end of a climbing rope. This is certainly preferred for such end-to-

ITRS: Tripods ‘falling’ over ↑↗→ © Richard Delaney, RopeLab, 2015 10
end loading scenarios. However, there seems to be a general understanding that outside tail
bowlines do not slip as readily as inside tail bowlines when ring loaded.
RopeLab conducted a series of tests in 2015 assessing the behaviour of several different bowlines
when ring loaded. All these tests were slow pulls to maximum of 20kN on new 11mm Sterling
HTP rope. Different results may come from using different ropes and rates of pull.
From the tests we can make some general observations:
The single strand, inside tail bowline appears to slip at forces as low as 3kN when ring
loaded. This knot is unstable in this configuration.
The single strand, outside tail bowline appears to be stable when ring loaded.
The double strand bowline appears to be stable when ring loaded whether it is tied in an
outside or inside tail orientation.
Even if stable, all tests were halted at approximately 20kN of applied tension as this value is well
above what should reasonably be expected during normal use.
Thus, the outside tail bowline appears to be an excellent choice of knot for this application. It
should be noted that even if the knot was to slip, the attendant and patient ends would not pull
through the bowline as they are terminated with figure-of-8 knots.
Many teams use two separate interwoven outside tail bowlines rather than the double strand
single knot. Having two separate knots gives the advantage of being able to untie one at a time
during transfers, however there is also the possibility that one or both may inadvertently be re-
tied as inside tail knots. The double strand bowline appears to retain ring load stability regardless
of tail configuration so it remains my preference for this use.

ITRS: Tripods ‘falling’ over ↑↗→ © Richard Delaney, RopeLab, 2015 11
It should be restated that inside tail configurations are still preferred for end-to-end loading
situations. The common practice of securing the working end of the rope will guard against
slippage if the knot is inadvertently ring loaded.
Summary
The height of AHD in technical rescue work is dictated by the height of the litter and bridle
package. Reducing the height of this package may allow the use of shorter and more stable
AHDs.
The height of litter and bridle can be reduced by choosing a compact system. The attachment
point is a key consideration and using a direct tie-in and can reduce height significantly.
The double-strand, outside-tail bowline is an excellent and appropriate choice of knot and, when
combined with the AZ-Tri bridle, results in a package height of 650mm. This in turn means that
AHD height can potentially be reduced to 1m or less.

ITRS: Tripods ‘falling’ over ↑↗→ © Richard Delaney, RopeLab, 2015 12
3. Tripods
Confined space tripod = Load Management Solution
Tripods are often used for access and standby rescue with confined space operations where a
symmetrical unit is setup over the top of a hole. One of the legs will often incorporate a hauling
mechanism attached to a line which runs up to a pulley at the tripod head and then down the hole
to an operator. The head is normally hinged so the feet are hobbled to prevent them
spreading. In this configuration everything is stable and there is no requirement for guy lines or
anchors.
For confined space rescue, management of the load is critical. The tripod needs to be high
enough to get a person suspended vertically in a harness up and out of the hole and thus these
tripods are normally more than 2m high.
Therefore, a confined space tripod should be considered a LOAD MANAGEMENT SOLUTION.

ITRS: Tripods ‘falling’ over ↑↗→ © Richard Delaney, RopeLab, 2015 13
Technical rescue tripod = Friction Management Solution
In technical rope rescue applications, a load normally needs to be managed outside the footprint
of the tripod. The footprint is an imaginary perimeter line that can be drawn connecting all of the
feet. The load may start at the base of a cliff and then, once at the top, be moved inboard and
placed on safe ground.
The term “resultant” has become a part of the language of rescue rigging. The “resultant” refers
to another imaginary line that represents the net force applied to the tripod head as a result of all
external connections. Technical rescue high directionals typically have a rope coming up from
the load, through a pulley at the head, and then back to a haul team. The resultant would then be
along a line which bisects the incoming and outgoing ropes. To achieve stability this “resultant”
should point to a spot on the ground well within the footprint of the high directional.
The key benefit of the technical rescue tripod is managing friction. Any time a rope turns 90
degrees over a rock or concrete edge, we have an effective system of mechanical disadvantage of
approximately 1:2. If we are attempting to raise a “standard rescue load” of 272kg/600lbs, then
unmanaged edge friction potentially results in a hauling force of twice the load and an equivalent
of 5.44kN/1,200lbf. Not only does this mean hard work, but also it shifts us into the realm of
forces in excess of the Safe Working Load of much of our equipment.
Thus, a technical rescue tripod should be considered a FRICTION MANAGEMENT
SOLUTION. Any benefit associated with moving a load over an edge is secondary.
If we acknowledge that high directionals for technical rope rescue have the primary task of
reducing edge friction, then a high directional need only be high enough to support a pulley just
above an edge. In many cases this may simply be high efficiency, spinning edge rollers. Teams

ITRS: Tripods ‘falling’ over ↑↗→ © Richard Delaney, RopeLab, 2015 14
internationally have long trained in managing loads at cliff edges without tripods. It requires
practice and a few people, but it is often the only option in wilderness operations.
Tripod Instability
Confined space and tech rescue high directionals are stable if the resultant remains within the
footprint. The biggest challenge is to visualise the resultant for the entire operation. It may be
well defined for 90% of the task but another 10% may include:
Planned movement of the high directional: “luffing” the frame in and out or “slewing” the
frame sideways.
Movement of the load away from the main operational line through tension from an
external rope.
Direct human influence on the path of the load, particularly during edge transitions.
Some other mid-operation change in an attempt to alter the path of the load.
Incremental change in organisational practice without external review.
Introduction of powered winches.
It is fine to have a resultant outside the footprint however this must be anticipated and
other components must be introduced to oppose this instability. This may involve a combination
of tension and compression elements.

ITRS: Tripods ‘falling’ over ↑↗→ © Richard Delaney, RopeLab, 2015 15
Tripod “resultant” forces
The following Questions/images represent six ways that tripods could be used to raise loads.
RopeLab conducted an online quiz to test understanding of each of these
(http://www.ropelab.com.au/ropelab-quiz-2/). To date there have been about 1,200 respondents
and the overall average score is just below 50%. The correct answers are provided after the final
question.
Question 1:
Question 2:

ITRS: Tripods ‘falling’ over ↑↗→ © Richard Delaney, RopeLab, 2015 16
Question 3:
Question 4:

ITRS: Tripods ‘falling’ over ↑↗→ © Richard Delaney, RopeLab, 2015 17
Question 5:
Question 6:

ITRS: Tripods ‘falling’ over ↑↗→ © Richard Delaney, RopeLab, 2015 18
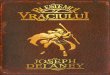
Quiz Answers:
Question Correct
Answer
Online quiz correct result
(1,200 responses during 2015)
1 B 77%
2 D 18%
3 C 45%
4 B 86%
5 D 16%
6 C 59%
There are a few key observations from these results:
- There is a general awareness of the idea of a ‘resultant’ force.
- Most people assume the pulley in the head of the tripod defines this ‘resultant’.
- There is a dangerous lack of awareness of the change associated with frame mounted
winches.

ITRS: Tripods ‘falling’ over ↑↗→ © Richard Delaney, RopeLab, 2015 19
The height of the AHD
If the edge is sudden, then a high efficiency edge roller is sufficient. As the edge becomes more
rounded, the position and height of the directional needs more careful consideration. More height
means more equipment, more weight, and more effort to achieve stability.
Operators have become focused on floating an attendant plus litter ‘rescue load’ up, in, and
placed down on stable ground. This operation typically requires an AHD which supports a pulley
at least 1.8m above the ground.
We have already shown that the total load height, from litter base to top of attachment knot, can
be as little as 0.65m. We have also discussed the options for removing the attendant from the
system, or at least removing them for the final edge transition. Shifting these two considerations
to the fore during training and planning then makes it possible to use much shorter AHDs.
Shorter AHDs can be:
Light and portable.
Easier to stabilise.
Manage a significant amount of edge friction.
High enough to move a horizontal litter in board easily.
Gin Poles
Careful consideration of the forces acting on a Gin Pole system are required and a minimum of
three guy lines are needed before it will stand up. This means operators will have to think much
more than they would for a free standing tripod. Given the rate that tripods appear to be falling
over, this requirement for extra thought is not a bad thing. A Gin Pole is far less likely to create
the illusion of stability.
More rope will be required to stabilise a Gin Pole than a tripod but there are new, lightweight
cordage options available that enable 50m of 6mm, 19kN cord to be carried in a small bag
weighing only 1.2kg. This length cord can be used for all anchoring and guying in most
situations. For comparison, 50m of 30kN, 11mm rope typically weighs 5kg.
A short Gin Pole will also force operators to be more efficient with every aspect of the rigging,
particularly the litter bridle.
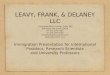
The following series of images shows the possibilities if all of the above issues are considered.
The short Gin Pole weighs 1.2kg – most tripods weigh more than 40kg.

ITRS: Tripods ‘falling’ over ↑↗→ © Richard Delaney, RopeLab, 2015 20

ITRS: Tripods ‘falling’ over ↑↗→ © Richard Delaney, RopeLab, 2015 21

ITRS: Tripods ‘falling’ over ↑↗→ © Richard Delaney, RopeLab, 2015 22
4. Conclusion
Many of the systems used for rope based technical rescue have become heavy, unstable, and have
lost focus on the key requirements of the task at hand.
The main function of a high directional in technical rope rescue is to manage edge friction. The
distraction of managing a tall, heavy load over an edge has led many to rely on unnecessarily tall
high directionals which are falling over far too often.
The key considerations of light-weight, portability, function, and stability can still be achieved
with short Gin Poles. It’s just that we may have to reverse a trend and put a bit more effort into
understanding, rather than going for an “NFPA G-rated”, one-size fits all approach to technical
rope rescue.

ITRS: Tripods ‘falling’ over ↑↗→ © Richard Delaney, RopeLab, 2015 23
5. Appendix: Powered winches and tripods
We are seeing an interesting collision of techniques:
Standard triangular pyramid tripods used for confined space rescue,
Asymmetrical multi-pods used for technical rope rescue and rope access, and
Powered winches.
Confined space operators have long been using symmetrical tripods with frame mounted manual
winches. These are normally set up over a hole and have a hand operated winch mounted on one
of the legs. These tripods are free standing and require no anchoring.
Technical rescue and rope access operators regularly use asymmetrical multi-pods for use in many
possible configurations to manage edge friction. Each configuration has varying anchor
requirements and these are mostly determined by careful evaluation of the forces acting on each
part of the system. These systems have traditionally been operated without winches.
There is now a range of winches suitable for use in technical rescue operations and these winches
can be mounted in several possible places including the following:
Directly attached to and controlled by the operator
Positioned at the system anchor and thus taking the place of a traditional hauling team
Mounted directly on a leg of the multi-pod
It is the last of these options that is of concern. Operators now have a reasonable grasp of the forces
of tension and compression in these multi-pod based systems. However, it often comes down to
bisecting the angle between the operational line over the edge and the line running back to the

ITRS: Tripods ‘falling’ over ↑↗→ © Richard Delaney, RopeLab, 2015 24
hauling team to determine the ‘resultant’ force on the frame. So long as this resultant is within the
footprint of the multi-pod, the system is stable.
Few operators realise how much this changes if a frame mounted winch replaces the hauling
team. The winch now becomes a part of the frame and thus it would make no difference whether
it was mounted down low at one of the feet or right up at the head. The significance of this is that
the only external forces acting on the frame are the downwards operational line and the upwards
contact pressure of the feet.
The confined space workers know and want this, as the tripod always sits over the hole. Rope
access and tech rescue operators, on the other hand, rarely have the operational line within the
footprint.
Any rope access and tech rescue operators considering using frame mounted winches must be
aware of this fundamental change in their evaluation of resultants.
Simple rule: If the winch is mounted on the frame, the resultant is the operational line. If
this line is outside the footprint then the frame needs to be guyed to counter this potential
tipping force.

ITRS: Tripods ‘falling’ over ↑↗→ © Richard Delaney, RopeLab, 2015 25
6. Notes
Richard Delaney was born in 1965 in Melbourne Australia. After completing high school, he
completed a Bachelor of Engineering (hons) and a Masters of Environmental Management.
Richard moved away from formal engineering work in 1992 to become a rock-climbing instructor
and eventually a senior instructor and operations manager for the Australian School of
Mountaineering. In 2003 he began working as a consultant in a wide range of recreation fields
but maintained he specific professional interest in rope related activities.
RopeLab was established in 2014 and this is the umbrella that enables Richard to work as a
technician, study and test rope systems, and conduct specialist training for others.
Richard is also:
- A volunteer with the NSW State Emergency Service
- A member of the NSW multi-agency Vertical Rescue advisory committee
- An active Level 3 industrial rope access technician
- A board member of the Australian Rope Access Association.
- A licensed dogger & rigger
7. Acknowledgements
Many of the images in this document have been created with the vRigger software package
(www.vrigger.com).
SMC has been working with RopeLab on the development of a new, light-weight Gin Pole. The
first prototype of this unit is shown in several images in this document. This unit has not yet been
publically released.