Embed Size (px)
Citation preview

Rough paths methods 1: Introduction
Samy Tindel
University of Lorraine at Nancy
KU - Probability Seminar - 2013
Samy T. (Nancy) Rough Paths 1 KU 2013 1 / 44

Sketch
1 IntroductionMotivations for rough paths techniquesSummary of rough paths theory
2 Usual Brownian caseBasic properties of Brownian motionItô’s stochastic integralStochastic differential equations
Samy T. (Nancy) Rough Paths 1 KU 2013 2 / 44

Sketch
1 IntroductionMotivations for rough paths techniquesSummary of rough paths theory
2 Usual Brownian caseBasic properties of Brownian motionItô’s stochastic integralStochastic differential equations
Samy T. (Nancy) Rough Paths 1 KU 2013 3 / 44

Nancy 104/09/13 05:45Nancy, France - Google Maps
Page 1 of 1https://maps.google.fr/maps?f=q&source=s_q&hl=en&geocode=&q=N…&spn=8.67615,22.214355&t=m&z=6&ei=zQ4nUsr0Jo3dtwebyYDoDg&pw=2
Address Nancy
Samy T. (Nancy) Rough Paths 1 KU 2013 4 / 44

Nancy 2: Stanislas square
Samy T. (Nancy) Rough Paths 1 KU 2013 5 / 44

Sketch
1 IntroductionMotivations for rough paths techniquesSummary of rough paths theory
2 Usual Brownian caseBasic properties of Brownian motionItô’s stochastic integralStochastic differential equations
Samy T. (Nancy) Rough Paths 1 KU 2013 6 / 44

Equation under consideration
Equation:Standard differential equation driven by fBm, Rn-valued
Yt = a +∫ t
0V0(Ys) ds +
d∑j=1
∫ t
0Vj(Ys) dB j
s , (1)
witht ∈ [0, 1].Vector fields V0, . . . ,Vd in C∞b .A d-dimensional fBm B with 1/3 < H < 1.Note: some results will be extended to H > 1/4.
Samy T. (Nancy) Rough Paths 1 KU 2013 7 / 44

Fractional Brownian motion
B = (B1, . . . ,Bd)
B j centered Gaussian process, independence of coordinatesVariance of the increments:
E[|B jt − B j
s |2] = |t − s|2H
H− ≡ Hölder-continuity exponent of BIf H = 1/2, B = Brownian motionIf H 6= 1/2 natural generalization of BM
Remark: FBm widely used in applications
Samy T. (Nancy) Rough Paths 1 KU 2013 8 / 44

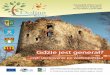
Examples of fBm paths
H = 0.3 H = 0.5 H = 0.7Samy T. (Nancy) Rough Paths 1 KU 2013 9 / 44

Paths for a linear SDE driven by fBmdYt = −0.5Ytdt + 2YtdBt , Y0 = 1
H = 0.5 H = 0.7
Blue: (Bt)t∈[0,1] Red: (Yt)t∈[0,1]
Samy T. (Nancy) Rough Paths 1 KU 2013 10 / 44

Some applications of fBm driven systems
Biophysics, fluctuations of a protein:New experiments at molecule scale→ Anomalous fluctuations recordedModel: Volterra equation driven by fBm→ Samuel KouStatistical estimation needed
Finance:Stochastic volatility driven by fBm (Sun et al. 2008)Captures long range dependences between transactions
Samy T. (Nancy) Rough Paths 1 KU 2013 11 / 44

Sketch
1 IntroductionMotivations for rough paths techniquesSummary of rough paths theory
2 Usual Brownian caseBasic properties of Brownian motionItô’s stochastic integralStochastic differential equations
Samy T. (Nancy) Rough Paths 1 KU 2013 12 / 44

Rough paths assumptionsContext: Consider a Hölder path x and
For n ≥ 1, xn ≡ linearization of x with mesh 1/n→ xn piecewise linear.For 0 ≤ s < t ≤ 1, set
x2,n,i ,jst ≡∫
s<u<v<tdxn,i
u dxn,jv
Rough paths assumption 1:x is a Cγ function with γ > 1/3.The process x2,n converges to a process x2 as n→∞→ in a C2γ space.
Rough paths assumption 2:Vector fields V0, . . . ,Vj in C∞b .Samy T. (Nancy) Rough Paths 1 KU 2013 13 / 44

Brief summary of rough paths theoryMain rough paths theorem (Lyons): Under previous assumptions→ Consider yn solution to equation
ynt = a +
∫ t
0V0(yn
u ) du +d∑
j=1
∫ t
0Vj(yn
u ) dxn,ju .
Thenyn converges to a function Y in Cγ.Y can be seen as solution to→ Yt = a +
∫ t0 V0(Yu) du +
∑dj=1
∫ t0 Vj(Yu) dx j
u.
Rough paths theoryRough paths theory
∫dx ,
∫ ∫dxdx
Smooth V0, . . . ,VdRough paths theory
∫dx ,
∫ ∫dxdx
Smooth V0, . . . ,Vd
∫Vj(x) dx j
dy = Vj(y)dx j
Samy T. (Nancy) Rough Paths 1 KU 2013 14 / 44

Brief summary of rough paths theoryMain rough paths theorem (Lyons): Under previous assumptions→ Consider yn solution to equation
ynt = a +
∫ t
0V0(yn
u ) du +d∑
j=1
∫ t
0Vj(yn
u ) dxn,ju .
Thenyn converges to a function Y in Cγ.Y can be seen as solution to→ Yt = a +
∫ t0 V0(Yu) du +
∑dj=1
∫ t0 Vj(Yu) dx j
u.
Rough paths theory
Rough paths theory
∫dx ,
∫ ∫dxdx
Smooth V0, . . . ,VdRough paths theory
∫dx ,
∫ ∫dxdx
Smooth V0, . . . ,Vd
∫Vj(x) dx j
dy = Vj(y)dx j
Samy T. (Nancy) Rough Paths 1 KU 2013 14 / 44

Brief summary of rough paths theoryMain rough paths theorem (Lyons): Under previous assumptions→ Consider yn solution to equation
ynt = a +
∫ t
0V0(yn
u ) du +d∑
j=1
∫ t
0Vj(yn
u ) dxn,ju .
Thenyn converges to a function Y in Cγ.Y can be seen as solution to→ Yt = a +
∫ t0 V0(Yu) du +
∑dj=1
∫ t0 Vj(Yu) dx j
u.
Rough paths theory
Rough paths theory
∫dx ,
∫ ∫dxdx
Smooth V0, . . . ,Vd
Rough paths theory
∫dx ,
∫ ∫dxdx
Smooth V0, . . . ,Vd
∫Vj(x) dx j
dy = Vj(y)dx j
Samy T. (Nancy) Rough Paths 1 KU 2013 14 / 44

Brief summary of rough paths theoryMain rough paths theorem (Lyons): Under previous assumptions→ Consider yn solution to equation
ynt = a +
∫ t
0V0(yn
u ) du +d∑
j=1
∫ t
0Vj(yn
u ) dxn,ju .
Thenyn converges to a function Y in Cγ.Y can be seen as solution to→ Yt = a +
∫ t0 V0(Yu) du +
∑dj=1
∫ t0 Vj(Yu) dx j
u.
Rough paths theoryRough paths theory
∫dx ,
∫ ∫dxdx
Smooth V0, . . . ,Vd
Rough paths theory
∫dx ,
∫ ∫dxdx
Smooth V0, . . . ,Vd
∫Vj(x) dx j
dy = Vj(y)dx j
Samy T. (Nancy) Rough Paths 1 KU 2013 14 / 44

Iterated integrals and fBm
Nice situation: H > 1/4→ 2 possible constructions for geometric iterated integrals of B.
Malliavin calculus tools→ Ferreiro-UtzetRegularization or linearization of the fBm path→ Coutin-Qian, Friz-Gess-Gulisashvili-Riedel
Conclusion: for H > 1/4, one can solve equation
dYt = V0(Yt) dt + Vj(Yt) dB jt ,
in the rough paths sense.
Remark: Recent extensions to H ≤ 1/4 (Unterberger, Nualart-T).
Samy T. (Nancy) Rough Paths 1 KU 2013 15 / 44

Study of equations driven by fBmBasic properties:
1 Moments of the solution2 Continuity w.r.t initial condition, noise
More advanced natural problems:1 Density estimates→ Hu-Nualart + Lots of people
2 Numerical schemes→ Neuenkirch-T, Friz-Riedel
3 Invariant measures, ergodicity→ Hairer-Pillai, Cohen-Panloup-T
4 Statistical estimation (H , coeff. Vj)→ Berzin-León, Hu-Nualart, Neuenkirch-T
−10 −5 0 5 100
0.02
0.04
0.06
0.08
0.1
0.12
0.14
0.16
Samy T. (Nancy) Rough Paths 1 KU 2013 16 / 44

Extensions of the rough paths formalismStochastic PDEs:
Equation: ∂tYt(ξ) = ∆Yt(ξ) + σ(Yt(ξ)) xt(ξ)
(t, ξ) ∈ [0, 1]× Rd
Easiest case: x finite-dimensional noiseMethods:→ viscosity solutions or adaptation of rough paths methods
KPZ equation:Equation: ∂tYt(ξ) = ∆Yt(ξ) + (∂ξYt(ξ))2 + xt(ξ)−∞(t, ξ) ∈ [0, 1]× Rx ≡ space-time white noiseMethods:
I Extension of rough paths to define (∂xYt(ξ))2
I Renormalization techniques to remove ∞
Samy T. (Nancy) Rough Paths 1 KU 2013 17 / 44

Aim
1 Define rigorously an equation driven by fBm or general Gaussianprocesses
2 Solve this kind of equation3 Investigate some properties of the solution
I Law of XtI Statistical issuesI Other systems (delayed equations, stochastic PDEs)
Samy T. (Nancy) Rough Paths 1 KU 2013 18 / 44

General strategy
1 In order to reach the general case, we shall go through thefollowing steps:
I Itô integral for usual Brownian motionI Young integral (2 versions) for H > 1/2I Case 1/3 < H < 1/2, with a semi-pathwise method
2 For each case, 2 main steps:I Definition of a stochastic integral
∫usdBs
for a reasonable class of processes uI Resolution of the equation by means of a fixed point method
Samy T. (Nancy) Rough Paths 1 KU 2013 19 / 44

Sketch
1 IntroductionMotivations for rough paths techniquesSummary of rough paths theory
2 Usual Brownian caseBasic properties of Brownian motionItô’s stochastic integralStochastic differential equations
Samy T. (Nancy) Rough Paths 1 KU 2013 20 / 44

Sketch
1 IntroductionMotivations for rough paths techniquesSummary of rough paths theory
2 Usual Brownian caseBasic properties of Brownian motionItô’s stochastic integralStochastic differential equations
Samy T. (Nancy) Rough Paths 1 KU 2013 21 / 44

Definition of Brownian motion
Complete probability space: (Ω,F , (Ft)t≥0,P)
One-dimensional Brownian motion: continuous adapted (Bt ∈Ft) process such that B0 = 0 and:
If 0 ≤ s < t, Bt − Bs independent of Fs
(Bt − Bs) ∼ N (0, t − s)
Definition 1.
d-dimensional Brownian motion:B = (B1, . . . ,Bd), where B i independent 1-d Brownian motions
Samy T. (Nancy) Rough Paths 1 KU 2013 22 / 44

Kolmogorov criterionNotation: If f : [0,T ]→ Rd is a function, we shall denote:
δfst = ft − fs , and ‖f ‖µ = sups,t∈[0,T ]
|δfst ||t − s|µ
Let X = Xt ; t ∈ [0,T ] be a process defined on (Ω,F ,P),such that
E [|δXst |α] ≤ c|t − s|1+β, for s, t ∈ [0,T ], c , α, β > 0
Then there exists a modification X of X such that almost surelyX ∈ Cγ1 for any γ < β/α, i.e P(ω; ‖ X (ω)‖γ <∞) = 1.
Theorem 2.
Samy T. (Nancy) Rough Paths 1 KU 2013 23 / 44

Brownian pathwise regularity
The Brownian motion B is γ-Hölder continuous for any γ <1/2, up to modification.
Proposition 3.
Proof: We have δBst ∼ N (0, t − s). Hence, for n ≥ 1,
E[|δBst |2n
]= cn|t − s|n i.e E
[|δBst |2n
]= cn|t − s|1+(n−1)
Kolmogorov: B is γ-Hölder for γ < (n − 1)/2n = 1/2− 1/(2n).Taking limits n→∞, the proof is finished.
Samy T. (Nancy) Rough Paths 1 KU 2013 24 / 44

Examples of fBm paths
H = 0.3 H = 0.5 H = 0.7Samy T. (Nancy) Rough Paths 1 KU 2013 25 / 44

Brownian irregularityRecall our strategy in order to solve SDEs:
Definition of a stochastic integral∫
usdBsfor a reasonable class of processes uResolution by fixed point method
For all ω ∈ Ω almost surely, the path Bt(ω); t ∈ [0,T ] is notdifferentiable in t for all t ∈ [0,T ].
Theorem 4.
Consequence for the definition of integrals:one cannot define
∫usdBs as a Riemann integral: the sums∑
si∈πusi δB(ω)si si+1
are not convergent in general as |π| → 0.Samy T. (Nancy) Rough Paths 1 KU 2013 26 / 44

Sketch
1 IntroductionMotivations for rough paths techniquesSummary of rough paths theory
2 Usual Brownian caseBasic properties of Brownian motionItô’s stochastic integralStochastic differential equations
Samy T. (Nancy) Rough Paths 1 KU 2013 27 / 44

Simple processes
A process u is called simple if it can be decomposed as:
ut = ξ010(t) +N−1∑i=1
ξi 1(ti ,ti+1](t),
withN ≥ 1, (t1, . . . , tN) partition of [0,T ] with t1 = 0, tN = Tξi ∈ Fti and |ξi | ≤ c with c > 0
Definition 5.
Remark:• For notational sake, most of our computations in dimension 1.• We shall mention when the d-dimensional extension is non trivial.
Samy T. (Nancy) Rough Paths 1 KU 2013 28 / 44

Integral of a simple process
Let u be a simple process. Let s, t ∈ [0,T ] such that s ≤ tand:
tm ≤ s < tm+1, and tn ≤ t < tn+1
We define Jst(u dB) = ”∫ t
s uwdBw ” as:
Jst(u dB) = ξm δBstm +n−1∑i=m
ξi δBti ti+1 + ξn δBtnt
Definition 6.
Remark:For simple processes, stochastic integral coincides with usual one.
Samy T. (Nancy) Rough Paths 1 KU 2013 29 / 44

Integral of a simple process: properties
Let u be a simple process, Jst(u dB) its stochastic integral.Then:
1 Jtt(u dB) = 02 Jst((αu + βv) dB) = αJst(u dB) + βJst(v dB) forα, β ∈ R
3 E[Jst(u dB)|Fs ] = 0, i.e martingale property4 E[(Jst(u dB))2] =
∫ ts E[u2
τ ] dτ5 E[(Jst(u dB))2|Fs ] =
∫ ts E[u2
τ |Fs ] dτ
Proposition 7.
Samy T. (Nancy) Rough Paths 1 KU 2013 30 / 44

Proof of claim 5
If i < j , then (independence of increments of B)
E[ξi(δB)ti ti+1 ξj(δB)tj tj+1
∣∣∣∣Ftj
]= ξiξj (δB)ti ti+1 E
[(δB)tj tj+1
∣∣∣∣Ftj
]= ξiξj (δB)ti ti+1 E
[(δB)tj tj+1
]= 0
Samy T. (Nancy) Rough Paths 1 KU 2013 31 / 44

Proof of claim 5 (2)
Hence
E[(Jst(u dB))2|Fs ]
= E(ξm−1(δB)stm +
n−1∑i=m
ξi(δB)ti ti+1 + ξn(δB)tnt
)2 ∣∣∣∣Fs
= E
[ξ2
m−1(δB)2stm +
n−1∑i=m
ξ2i (δB)2
ti ti+1 + ξ2n(δB)2
tnt
∣∣∣∣Fs
]
= E[ξ2m−1|Fs ](tm − s) +
n−1∑i=m
E[ξ2i |Fs ](ti+1 − ti) + E[ξ2
n|Fs ](t − tn)
=∫ t
sE[u2
τ |Fs ] dτ
Samy T. (Nancy) Rough Paths 1 KU 2013 32 / 44

L2a space
The set of left continuous square integrable processes u suchthat ut ∈ Ft is called L2
a. The norm on L2a is defined by:
‖u‖2L2
a≡∫ T
0E[u2
s
]ds
Definition 8.
Let u ∈ L2a. There exists a sequence (un)n≥0 of simple processes
such thatlim
n→∞‖u − un‖L2
a = 0
Proposition 9.
Samy T. (Nancy) Rough Paths 1 KU 2013 33 / 44

Extension of the stochastic integral
Let u ∈ L2a, limit of simple processes un. Then for s < t
The sequence (Jst(un dB))n≥0 converges in L2(Ω)
Its limit does not depend on the sequence (un)n≥0
Proposition 10.
Proof: We know that:
E[(Jst(un − um))2
]=∫ t
sE[(un
w − umw )2
]dw .
Therefore,(Zn)n≥0 ≡ (Jst(un))n≥0
is a Cauchy sequence in L2(Ω).
Samy T. (Nancy) Rough Paths 1 KU 2013 34 / 44

Extension of the stochastic integral (2)
Let u ∈ L2a. The stochastic integral of u with respect to B is
the process J (u dB) such that, for all s < t,
Jst(u dB) = L2(Ω)− limn→∞Jst(un dB),
where (un)n≥0 is any sequence of simple processes convergingto u.
Definition 11.
Remark: Properties (1)–(5) established for simple processes are stillsatisfied for processes in L2
a.
Samy T. (Nancy) Rough Paths 1 KU 2013 35 / 44

Integral of a process in L2a: properties
Let u be a process in L2a, Jst(u dB) its stochastic integral. Then:
1 Jtt(u dB) = 02 Jst((αu + βv) dB) = αJst(u dB) + βJst(v dB) forα, β ∈ R
3 E[Jst(u dB)|Fs ] = 0, i.e martingale property4 E[(Jst(u dB))2] =
∫ ts E[u2
τ ] dτ5 E[(Jst(u dB))2|Fs ] =
∫ ts E[u2
τ |Fs ] dτ
Proposition 12.
Remark: For this construction, essential use ofIndependence of increments of BProbabilistic convergence of L2 typeSamy T. (Nancy) Rough Paths 1 KU 2013 36 / 44

Sketch
1 IntroductionMotivations for rough paths techniquesSummary of rough paths theory
2 Usual Brownian caseBasic properties of Brownian motionItô’s stochastic integralStochastic differential equations
Samy T. (Nancy) Rough Paths 1 KU 2013 37 / 44

Equation under consideration
Xt = a +∫ t
0σ(Xs)dBs +
∫ t
0b(Xs)ds, t ∈ [0,T ] (2)
a ∈ Rn initial conditionb, σ coefficients in C 1
b
B = (B1, . . . ,Bd) d-dimensional Brownian motionB i iid Brownian motions
Samy T. (Nancy) Rough Paths 1 KU 2013 38 / 44

Notational simplification
Simplified setting: In order to ease notations, we shall consider:Real-valued solution and Brownian motion: n = d = 1.However, we shall use d-dimensional methodsb ≡ 0
Simplified equation: we end up with
Xt = a +∫ t
0σ(Xs)dBs , t ∈ [0,T ] (3)
a ∈ R, σ ∈ C 1b (R)
B is a 1-d Brownian motion
Samy T. (Nancy) Rough Paths 1 KU 2013 39 / 44

Fixed point: strategy
A map on a small interval:Consider an interval [0, τ ], with τ to be determined later
In this interval, consider Γ : L2a([0, τ ])→ L2
a([0, τ ]) defined by:Γ(Y ) = Y , with Y0 = a, and for all s, t ∈ [0, τ ]:
δYst =∫ t
sσ(Yu)dBu = Jst(σ(Y ) dB)
⇔Yt = a +∫ t
0σ(Yu)dBu
Aim: See that for a small enough τ , the map Γ is a contraction→ our equation admits a unique solution in L2
a([0, τ ])
Samy T. (Nancy) Rough Paths 1 KU 2013 40 / 44

Contraction argument in [0, τ ]Definition of 2 processes:Let Y 1,Y 2 ∈ L2
a([0, τ ]). Set Y i = Γ(Y i). Then
Y 1t − Y 2
t =∫ t
0
[σ(Y 1
s )− σ(Y 2s )]
dBs
Evaluation of the difference:With cσ = ‖σ′‖∞, we have:
‖Y 1 − Y 2‖2L2
a([0,τ ]) =∫ τ
0E[(Y 1
t − Y 2t )2
]dt
=∫ τ
0dt∫ t
0E[(σ(Y 1
s )− σ(Y 2s ))2
]ds
≤ c2σ
∫ τ
0dt∫ t
0E[(Y 1
s − Y 2s )2
]ds
≤ c2σ‖Y 1 − Y 2‖2
L2a([0,τ ]) τ
Samy T. (Nancy) Rough Paths 1 KU 2013 41 / 44

Contraction argument in [0, τ ] (2)Contraction: Choose τ so that
c2στ =
14 , i.e τ =
14c2σ
We have obtained:
‖Γ(Y 1)− Γ(Y 2)‖L2a([0,τ ]) ≤
12‖Y
1 − Y 2‖L2a([0,τ ])
Conclusion: Classical fixed point argument→ Unique solution for equation (3) in [0, τ ].
Let τ = 14c2
σ, with cσ = ‖σ′‖∞. There exists a unique solution
X to equation (3) in L2a([0, τ ]).
Lemma 13.
Samy T. (Nancy) Rough Paths 1 KU 2013 42 / 44

From [0, τ ] to [τ, 2τ ]
New map Γ: In [τ, 2τ ], consider the map
Γ : L2a([τ, 2τ ])→ L2
a([τ, 2τ ])
defined by: Γ(Y ) = Y , with Yτ = Xτ , and for s, t ∈ [τ, 2τ ]:
(δY )st =∫ t
sσ(Yu)dBu = Jst(σ(Y ) dB)
⇔Yt = Xτ +∫ t
τσ(Ys)dBs = Xτ +
∫ t
τσ(Ys)dBτ
s ,
with Bτs = Bs − Bτ , independent of Fτ .
New fixed point argument: the same fixed point arguments yield aunique solution X to (3) in L2
a([τ, 2τ ]).
Samy T. (Nancy) Rough Paths 1 KU 2013 43 / 44

Existence and uniqueness result
Iterating the fixed point arguments, we get:
Let σ ∈ C 1b (R), T > 0 and a ∈ R.
Then equation (3) admits a unique solution in L2a([0,T ]).
Theorem 14.
Remark: possible simple improvements:d-dimensional caseDrift coefficient bLipschitz coefficients σ, b
Samy T. (Nancy) Rough Paths 1 KU 2013 44 / 44

![Rough paths and rough partial differential equations differential equations Standard ordinary differential equation y˙ t = V(y t); y 0 = ˘2Rd; t 2[0;1] V : Rd!Rd smooth Controlled](https://img.pdfslide.net/doc/110x75/5ed5eb0cc46614170c62b930/rough-paths-and-rough-partial-differential-differential-equations-standard-ordinary.jpg)