Embed Size (px)
Citation preview

Routing in Communication Networks
Routing: Network layer protocol that guides information units to correct destinations. A complex collection of decision rules that work somewhat independently.
- Determination of allowable path set for each origin - destination pair
- Broadcast of routing related information to all network nodes
- Determination of particular path per arrived call.

Routing Types
Virtual circuit routing
Datagram routing

Characteristics
Performance indices
Throughput
Delay
Under light load: throughput = offered load
Under heavy load: throughput = offered load - rejected load

Routing interacts with flow control to maintain the performance
Traffic experiences delay depending on routing
Flow control rejects a portion of load depending on delay

Routing Types Revisited
Virtual circuit vs. datagram
Centralized vs. distributed
Static vs. adaptive
Hierarchical vs. non hierarchical

Broadcasting
Send information from a node to all nodes in networks (e.g., announcing equipment and link failures)
Send information from a node to some selected subset of nodes
Examples of broadcasting method: Flooding
A node send a packet to all of its neighbors.
Each neighbor sends the received packet to its neighbors and so on.
Loop back should be eliminated.
Multiple transmissions must be eliminated.
Not efficient.

Example: Spanning Tree
Connected sub-graph of network including all nodes
No cycles
Packets transmitted over spanning tree
More efficient than flooding
Packets transmitted N-1 times (N = number of nodes)

Routing Examples Shortest path routing
Each link has a link length (> 0).Path length is the sum of link lengths over the path.Shortest path routing routes each packet over a minimum length path (i.e.,a greedy algorithm).Minimum hop routing: If every link has a unit link cost.
Optimal routingRoutes are determined for all OD pairs simultaneously for the good of entire network.Can eliminate potential oscillations in the shortest path routing.
Hot potato routingMinimize buffer requirements.Arrived packets are routed on an out-going link from the list of links.Packets may get out of sequence.Packets may experience long delay.
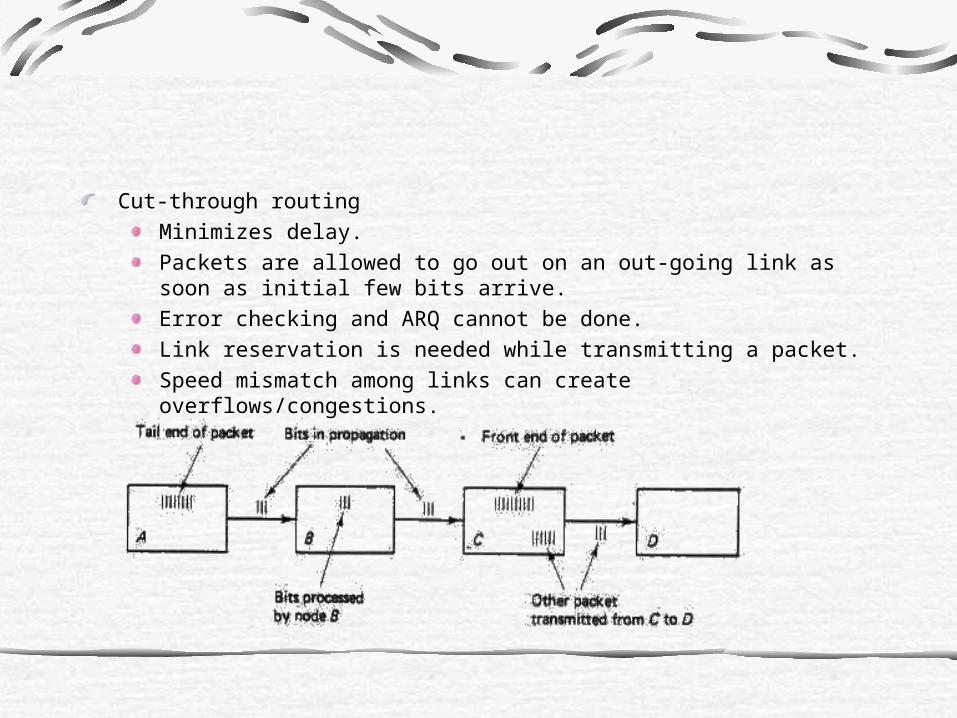
Cut-through routing
Minimizes delay.
Packets are allowed to go out on an out-going link as soon as initial few bits arrive.
Error checking and ARQ cannot be done.
Link reservation is needed while transmitting a packet.
Speed mismatch among links can create overflows/congestions.

ARPANET routingAdaptive and distributed datagram routingShortest path routing based on link delay as link lengthShortest paths are calculated using Bellman-Ford algorithm.Link lengths are updated every 10 seconds.
TYMNET routingCentralized and adaptive virtual circuit routingSupervisor determines the routing for all nodes.Shortest lath routing based on link load as link length
SNA routingNetwork manager chooses virtual paths for each OD pair
Circuit switched routingLike virtual circuit routingTypically implemented with hierarchy

Interconnected Network Routing
Involves gateways, routers, and bridges between networks
Non hierarchical routing
Control becomes complex.
Much information needs be stored at each node.

Hierarchical routing
long distance routing
Routing within sub-network
Lower information storage at potentially lower performance

Graphical Model for Routing
Use of Graph Theoretic Model Undirected graph G = (N, A)N = finite non empty set of nodesA = collection of pairs of distinct nodes from N called arc.
N = {1,2,3,4}A = {(1,2), (2,3), (4,1), (2,4)}
Note:No loopNo multiple arcs between the same pair of nodesA node is also called a vertex.An arc is also called an edge, link, or branch.
1 2
34

Definition:
A walk is a sequence of nodes (n1, n2, n3,…,nl) such that (n1, n2) (n2, n3),…(nl-1, nl)
are each an arc in G.
Definition:
A path is a walk with no repeated node.
Definition:
A cycle is a path with no repeated node expect for n1 = nl.
1, 4, 2, 1, 4, 1 walk1, 4, 2, 3 path1, 2, 4, 1 cycle1
2
4
3

Definition
A graph is connected if from each node i, there is a path to any other nodes j.
1
2
3
5
4
unconnected graph

Lemma: Let G = (N,A) is a graph. S N and S N. Then G is connected if for any such S there is at least one arc (i, j) with i S and j S.
Definition: g= (n, a) is a sub-graph of G=(N,A) if g is a graph and n N and a A.
Definition: A tree is a connected graph with no cycle.
Definition: A spanning tree of a graph G is a sub-graph of G that is a tree and that includes all nodes of G.
Si
Sc
j
G

Spanning Tree
Tree
1
2
3
4
5
7
6
Spanning Tree
2
1 5
4
3
6
7
1
23
4
5
6
7
G = (N, A)

Using the lemma, we can find an algorithm for generating a spanning tree of a connected graph G = (N,A).
2. toGo }.{'' and
)},{('' update ,' and ' with ),( If .3
.3 tocontinue Else
. of treespanning a is }' ,'{' stop. then ,' If .2
}.' ,'{'{},' },{' :any Start with .1
jNN
jiAANNjNiAji
GANGNN
ANGAnNn
1
2
4
31
2
11
22
3 3
4

Proof (that the algorithm above gives a spanning tree.):
tree.spanning a have weThus
. stops algorithm The tree.a have westepeach at Therefore,
.hypothesis inductive by the cycle no is thereWithout
) .on incident arc oneonly is (There cycle. ain
becannot node because cycle, a havecannot Now connected. is
subgraph updated theSo . nodeevery path to a has Similarly,
. path to a has nodeeach
,for arc and ' node addingAfter
lemma. theprove toinduction use will weI.e.,
update. after the treea remainsit that prove We
.3 step of updatean before treea is
)','(' suppose Now tree.a is }) {},({'Initially
N'N
j
jj)(i,
jG'
N'kj
jN'k
N')(iAj)(i,NNj
ANGnG
Note:
In each step, we add one node and one arc. Since we start with one node and no arc, the algorithm must end with |N| nodes and |N |-1 arcs. We can use this algorithm to show that if G = (N, A) is connected then |A| |N|-1 and G is a tree if |A| = |N|-1.

Minimum Weight Spanning Tree (MST)
For G = (N,A), let each arc (i, j) has some weight wij. We want to find a spanning tree with the minimum sum of arc weights.
Definition
Any sub-tree of an MST is called a fragment.
Definition
An arc having one node in a fragment and the other one outside the fragment is called an outgoing arc.
Fact
Given a fragment F, let =(i, j) be a minimum weight outgoing arc form F where i F and j F. The F extended by the arc and node j is fragment.
F
MST4
5
22
j
4
6
3
2
2 3
1
1
i
Kruskal’s Algorithm
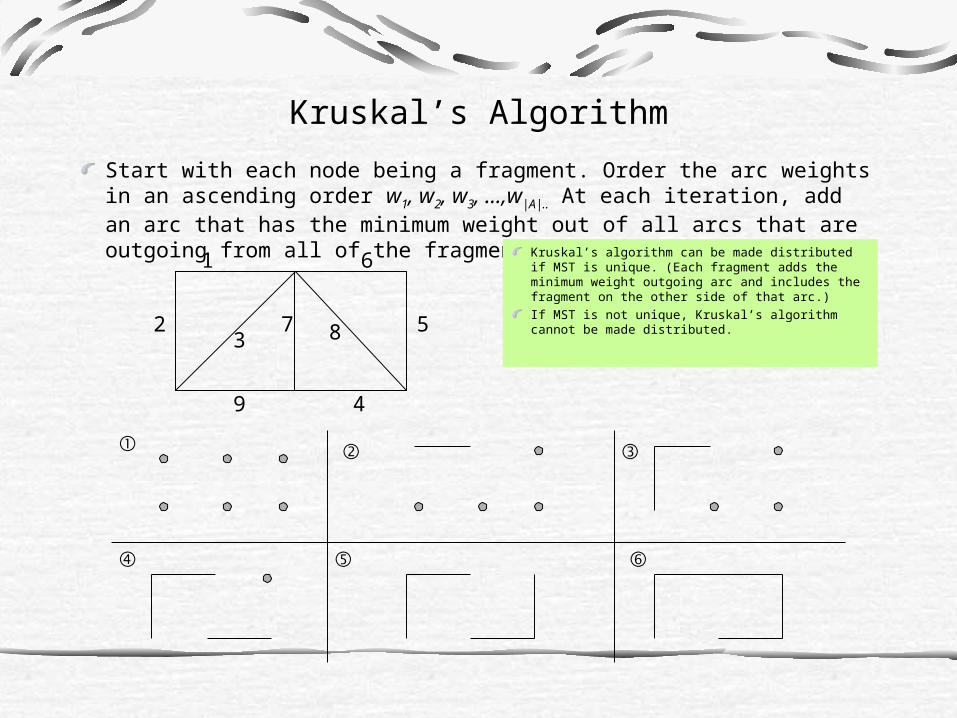
Start with each node being a fragment. Order the arc weights in an ascending order w1, w2, w3, …,w|A|.. At each iteration, add an arc that has the minimum weight out of all arcs that are outgoing from all of the fragments.
1 6
58
49
23
7
Kruskal’s algorithm can be made distributed if MST is unique. (Each fragment adds the minimum weight outgoing arc and includes the fragment on the other side of that arc.)
If MST is not unique, Kruskal’s algorithm cannot be made distributed.

Prim-Dijkstra Algorithm
Start with a single node (which is a fragment).
.2 toGo )}.,{(' and }{'' :follows as Update
. from arc outgoing weight minimum a be ),(Let .3
3. togo Else stop. ,' If .2
.arbitrary for }) {},({)','( .1
jiAAjNNF
Fji
NN
nnANF
1 6
58
49
2 3 7
The resulting MST may not be unique.It all arc weights are distinct, the MST is
unique.

Directed Graph (Digraph)
For a graph G = (N,A), let N be a finite non empty set of nodes and let A be a collection of ordered pairs of distinct nodes from N. (There is no loop as before.)
Definition Given a digraph G = (N, A), a graph G´=(N´, A´) is (undirected) associated
graph if N´= N and (i, j) A´ if (i,j) A or (j,i) A.Definition
Walk, path, cycle in a digraph are those of the associated graph.Definition
(n1, n2, n3, …, nl ) is a directed walk in G if (ni, ni+1) is a directed arc in A for i=1, 2, 3,…, l-1.
1
2
3
4
Definition
G= (N, A) is strongly connected if for each pair i N and j N, there is a directed path from i to j.
Fact
G is connected if the associated graph is connected.
Definition
For a given digraph G = (N, A), assign to each arc (i, j), some number dij as the length of the arc. The length of a path is the sum of the lengths of the arcs that comprise the path.
Problem Definition
Shortest Path Problem is a problem that finds, for any two given nodes i and j, a path with the shortest path length.

Bellman – Ford Algorithm
At each step, calculate the shortest path using h or less arcs.
At the end of the first step, we have the shortest paths using one arcs.
At the end of the second step, we have shortest paths using two or less arcs.
And so on.
Example:
Example
1
1
1
4
4
4
2
2
2
23 5
8
1
1
43
5
42
112 )(D
)(14D
)(15D
413 )(D
011 )(D
021 )(D
122 )(D
924 )(D
625 )(D
223 )(D
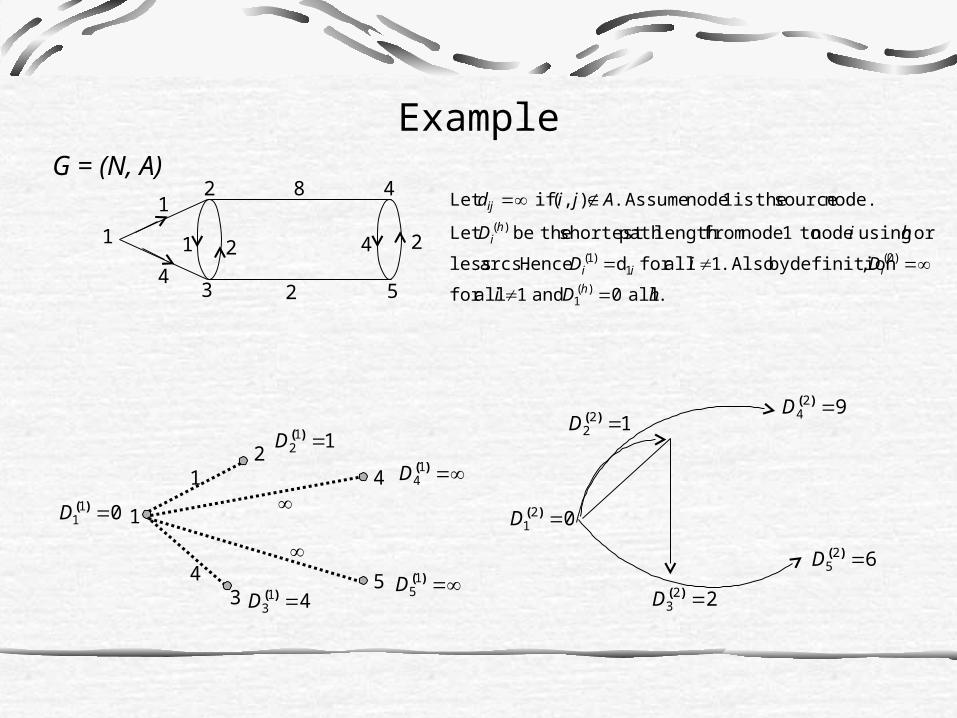
. all 0 and 1 allfor
,definitionby Also .1 allfor d Hence arcs. less
or using node to1 node fromlength path shortest thebe Let
node. source theis 1 node Assume .),( if Let
)(1
)0(1
)1(
)(
hDi
DiD
hi D
Ajid
h
iii
hi
ij
G = (N, A)

031 )(D
132 )(D 93
4 )(D
233 )(D 43
5 )(D
142 )(D 84
4 )(D
041 )(D
243 )(D 44
5 )(D
. allfor )(min:Use
.1 allfor
. allfor 0
)()1(
)0(
)(1
jidDD
iD
hD
jih
jAj
hi
i
h

A path can contain at most |N|-1 arcs. Thus is the shortest path length from 1 to i. If for all i, is the shortest path length and we can stop the algorithm.
At step h, the algorithm finds the shortest ( h) walk from 1 to i subject to constraint that node 1 is not repeated in the walk. Other nodes can potentially be repeated, however. If there is a negative length cycle, the algorithm will not converge. (We can have negative length arcs, but cannot have negative length cycles.)
To get the shortest path, solve Bellman – Ford equations:
1 allfor
idDD jijAj
i )(min
)( 1NiD
)()( hi
hi DD 1 )(h
iD

Dijkstra’s Algorithm
All arc lengths must be positive
Dijkstra’s algorithm is less computationally intensive than Bellman – Ford
1. step toGo
such that for Update2. Step
2. togo Else stop. If Set
such that Find 1. Step
1for and 0,1 Initialize 0. Step 11
],min[
}.{
.min
.},{
ijijj
j
jPj
i
jj
dDDD
PjD
NPiPP
DDPi
jdDDP

Example
Initial :
],min[
],min[
],min[
}..{:
,,},{.,
25255
24244
23233
543211
9
2
21 thereforeand 21
411 means This 0Set
dDDD
dDDD
dDDD
Pist
DDDDPdDD jj
1
2
1
.min jPj
i DD
1
1
1
4
4
4
2
2
2
23 5
8
Find shortest path from node 1.At each step, we need to use

4
9
321 thereforeand 32
35355
34344
],min[
],min[
}.,,{:
dDDD
dDDD
Pind
8
5321 thereforeand 53
54544
],min[
}.,,,{:
dDDD
Pird
1
11
2
3
1
3 52
1
2
1

Stop. .54321 thereforeand 54 },,,,{: Pith
1
1
32
5
4
4
1
2

Floyd-Warshall
Find shortest path between al pairs of nodes at the same time.
Arc lengths can be negative.
No negative length cycles allowed.
Iterate on the number of intermediate nodes in a path:
path. on the nodes
teintermedia as used becan 1,2,3...n nodesonly that
constraint with j toi fromlength path shortest where
all ],min[
1,...,2,1,0For
. such that , allfor
)(
)()1(
)()1(
)()1(
)0(
nij
njn
nni
nij
nij
ijij
D
jiDDDD
Nn
jijidD

Distributed Bellman - Ford
Finds the shortest path to a given node (say node 1) from all other nodes.
Bellman-Ford algorithm is given by
Where N(i) is set of all neighbors of i.
Note:
An alternative (perhaps better known) version is to find shortest path fro node 1 to all other nodes. (1) can be implemented in distributed manner.
1. All nodes will execute (1) simultaneously.
2. Exchange the results of the computation with their neighbors.
3. Execute (1) again with index h incremented by 1.
Initial condition:
0
1 1
11
1
)(
)(
)(
)( )()(min
h
hjij
iNj
hi
D
iDdD
0
1 allfor 0
1
0
)(
)(
D
iDi

Algorithm will end in N-1 steps.
It is not easy to synchronize all the nodes.
If the network changes (e.g., due to failures), re-synchronization is needed.
Distributed version of Bellman-Ford. Execute indefinitely the following :
Where is the latest estimate received from node are
the latest arc length. More formal notation: At each time t, node i has
)(min)(
jijiNj
i DdD
jD sdiNj ij ')( and
).( allfor has nodeEach
)(1with and allfor 0)(
allfor 0)(
iteration. Ford-Bellman toaccording nodeat computedlast which was
node of distanceshotest theof estimate the:)(
. with atedcommunicatlast which was)(
node of distanceshortest theof estimate the:)(
01
01
iNjdi
iNi tttD
tttD
i
itD
iiNj
tD
ij
i
i
ij

Main Components of Distributed Bellman-Ford
changed. is estimate no and idle is Node 3.
y.accordingl updates and
nodeat updated which was value the
neighbors moreor one from receives Node 2.
unchanged. allfor leaves and
)]([min
by updates Node .1
)(
(t)D
jDN(i) j
i
N(i)j (t)D
tDd(t)D
(t)Di
ij
j
ij
ijij
iNji
i

Main Assumptions for Proper Working of Distributed Bellman-Ford Algorithm
Nodes never stop updating the own estimates and receiving messages from all their neighbors.
All initial node estimates and are non negative.
All estimates communicated to node before initial time and received
after are non negative.
Old distance information is eventually purged.
With the assumptions above:
Proposition : There is a time such that for all
Di is the correct shortest distance.
)(tDi 0(t)D i
j
0t
0t
mt ....,3,2,1for )( , NiDtDtt iim

Routing in ARPANET
Original version (1969)
Length of each link depends on the number of packets waiting in the link queue.
Nodes exchange information on the shortest distance every 625 msec.
Bellman-Ford algorithm is used for shortest paths.
Prone to oscillation.
Modified version (1979)
Length of each link is proportional to the average delay.
Link length is updated every 10 seconds.
Nodes exchange information on the length of their outgoing links every 60 seconds.
Shortest path is calculated by Dijkstra’s algorithm.
Prone to oscillation.

Optimal Routing
We want to quantify the traffic congestion in a network in terms of the arrival processes.
One common performance measure is the sum of packet delays.
Formal representation of network performance:
queue. M/M/1an isit that assumption on the based link of queue
system in the packets ofnumber average thegives formula This
.link on delay n propagatio and processing
asunit same in the link ofcapacity
of Example
function.cost increasinglly monotonica a bemust
link on rate arrival traffici.e., ,link on flow where
)(,
(i,j)
(i,j)d
.F(i,j)C
Fd-FC
F)(FD
:D
D
(i,j)(i,j)F
FD
ij
ijij
ijijijij
ijijij
ij
ij
ij
jiijij

Notation
Pp:(i,j)pij
ij
wp
Ppwp
p
w
p
w
xF
F(i,j)
WwPpx
W wrx
PW,pw:{x
Wwr
px
Ww
P
W
link. thisg traversinflowspath of sum theis, i.e., ,link of flow Total
and allfor 0
allfor
satisfymust } Clearly
pair ODfor rate arrival ficinput traf
path on flow fractional
.pair OD of nodes
ndestinatio and nodeorigin theconnecting paths directed all ofset
pairs. (OD)n destinatio -origin ofset
Optimal Routing Problem
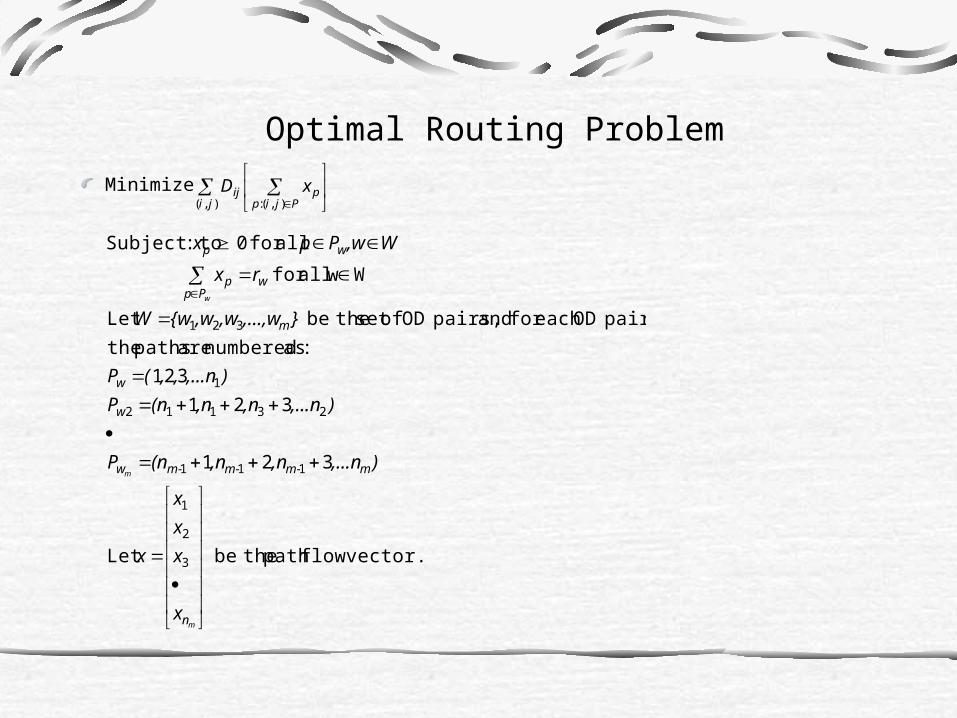
Minimize
),( ),(:ji Pjippij xD
vector.flowpath thebe Let
321
321
321
:as numbered are paths the
pair, ODeach for and pairs, OD ofset thebe Let
W wallfor
allfor 0 : Subject to
3
2
1
111
23112
1
321
m
m
w
n
mm-m-m-w
w
w
m
Ppwp
wp
x
x
x
x
x
),...n,n,n(nP
),...n,n,n(nP
),...n,,(P
},...,w,w,w{wW
rx
W,wPp x

.path oflength )(
then ,link oflength let the weIf
.)(
:Note
. where
0and
0
, and allfor if and problem routing theof
sconstraint thesatisfiesit if vector flowpath optimalan is Then
'
link containing
paths allpath on
links all
link containing
paths all),(
px
xD D(i,j)
xDx
xD
xDD(x)
x rx
)x(xx
)D(x
WwPp
x
p
ij
(i,j)
p
p(i,j)
ijp
(i,j)
pji
ij
pwPp
p
Ww Pppp
p
w
w
w

Optimization Lemma
Let f be differentiable convex function of the n- dimensional vector
x={x1, x2 , … xn). Let. X be a convex set of vectors. Then x* X is an optimal solution
of the problem:
Minimize : f(x)
Subject to : x X
.0* ),(
as written also becan condition The
. where
allfor 0)( iff1
xxxf
x
f(x)
x
)f(x
Xxxxx
)f(x
xxii
n
iii
i

Proof
).g( ofconvexity thecontradit (2) and (1) equations The
(2) 0)()(
)0(
Also
(1) ~1 0 Then,
~)Consider
~such that ~Let
minimum.not is but ,0)()(
suppose Conversely
.0)()()()0(
[0,1].over minimum is 0 Therefore,
[0,1]. where))-(()let ,every For
solution. optimalan is Suppose
1
1
10
ii
n
i i
ii
n
i i
ii
n
i i
xxx
xfg
)xf()g()f(x)g(
))-xxα(f(xg(α
).f(x)xf(Xx
xxxx
xf
xxx
xfgg
)f(x)g(
xxxfg(αXx
x

0)()0(
)0()(
0. and 0Let
)()(
)()(
)()(
)()(
)()()(
)()(
)()()()( Then,
1,0,)()()()-(1
. 0 allfor (0) )( then,
,0)0(
and abledifferenti andconvex is )( If
122
21
1212
121
112
1211
12
112112
12121
1
ggg
ggg
ggg
t
gtggg
gggg
ggg
gg
gg

Optimality Condition
(2). allfor 0)()(
to(1)simplify can We
. allfor and allfor 0, satisfying allfor
(1) 0)()(
AND , allfor
, allfor and allfor 0
if vector flowpath optimalan is
Wwxxx
xD
PpW wrxxx
xxx
xD
Wwrx
WwPpx
xx
pp
xPp p
ww Pp
ppp
Wwpp
xPp p
w Pp
p
wp
p
w
w
w
w

Proof
true.also is Converse (2). useThen
.or pathsother allfor and , and 0Let
.'path other some and 0for which path Consider
(Proof)
.' allFor
)()( iff 0 allFor
further. (2)simplify can We
. and ' allfor let each For
""'
'
'
p'pp"xxx, x-xx
pxp
Pp
x
xD
x
xDW, xw
Piww xxW,w
pppppp
p
w
xpxpp
wii

Summery of Optimal Condition
A set of path flows is optimal iff path flow is positive only on the paths with a minimum first derivative length. Also at the optimum path flow vector, the path along which the traffic rw is split must have equal length.
Example:
r
x1
r
x2
C2
C1
ies.possibilit twoare There
.(obvious) havemust We.Let
.0 ,0 , as wellas
satisfied bemust (1)condition path shortest theoptimum, At the
. and )( where
)()()(
2121
2121
21
2211
xxCC
xxrxx
CCrxC
CxD
xDxDxD
ii
iii

(2), and (1) From
(2) . also and
(1) )()(
Therefore,
.)()(
and )()(
havemust we true,be toFor this .0 ,0 2. Case
1
)(
)()(
havemust we true,be toFor this .0 , .1 Case
21
21122
21
21211
21
222
22
11
1
2
2
1
1
21
21
2112
21
1
21
21
CC
CCCrCx
CC
CCCrCx
rxx
xC
C
xC
C
x
xD
x
xD
x
xD
x
xD
xx
CCCrCrC
C
x
xD
x
xD
xrx
xxxx
xx

211 CCC 21 CC
2x
1x
21 and xx
r

Example
r r
1x
2x
3x
possible.not is which 022 0 , ngSubstituti
.2,1for
havemust we true,be toFor this
0 ,0 1. Case
ies.possibilit threeare There
. havemust we,)( ofsymmetry theFrom
. allfor 0 and ,
2)(
213
3
3213
21
321
323
22
21
r,xxrx
ix
D(x)
x
D(x)
rxxxx
xxxD
ixrxxx
xxxxxD
xix
i

3
1 ,
3
2
3
222
22
,2
ngSubstituti
3
havemust we true,be toFor this2
, .3 Case
.222
2 2
,0 ngSubstituti
.2,1for
havemust we true,be toFor this2
,0 2. Case
213
321
21
213
213
3
213
rxx
rx
rr
xr
xx
x
D(x)
x
D(x)
x
D(x)
rxxx
rrr
xxx
ix
D(x)
x
D(x)
rxxx
xxx
xix

1 2 3 4
1
2
3x
21 xx
r
321 ,, xxx

Feasible Direction Methods
In optimal routing, there is a positive flow only on those paths with minimum first derivative length (MFDL).
A path flow vector x is strictly sub optimal if there is a positive flow on a non NFDL path.
Given a sub optimal path flow vector, we can improve the routing by shifting flows from non MFDL paths to MFDL paths.
A path flow vector x={xp} that satisfies the constrains
Suppose we have a non MFDL path flow vector x which is feasible.
vectorflowpath fesible a called is allfor 0
allfor
wp
wPp
p
PW, pwx
Wwrxw
.0,for feasible also bemust vector new The
.by change We
xx
xxx p

Wwx
Wwrxxxx
Wwxx
Δxx
xD
xWwPpxWwx
pPp
wpPp
p
Ppp
Ww Ppp
p
pwpPp
p
w
w
w
w
w
allfor 0
allfor )( feasiable. also is
. allfor r feasiable. is
:1 of Proof
flow. ofon conservati thecalled is 1condition The
0)(
.2
.0for which , allfor 0 and allfor 0 .1
have,must werouting, theimprove toas wellas vector feasiable a be tofor thisorder In
w
).( of gradients thecalled is )(
direction.descant a is say we true,is 2condition theIf
negative.non be for 0 havemust we0, if Moreover,
2
1
xDxDx
D(x)
x
D(x)
x
xxxxx ppppp

x
Constraint Set
Feasible descent directions at x
Surface of equal cost
x
)(xD
Repeat.
feasible. is and )(such constant afor Let
direction.descent feasible a be and feasible, be Let
Algorithm Iterative
MFDLnon oneleast at for 0
MFDLnon arepath that allfor 0
flow. ofon conservati thesatisfiesIt
:such that choosingby thisachievecan We.function theofpoint minimum a find want to We
xxxDx)D(xxxx
xx
x
x
xD(x)
p
p

Frank – Wolfe Method
path.shortest path toshortest non from shifted is Flow
. ~ where onefor except 0,each For
:Note
Repeat. 3.
., allfor ))~(~ ~Set
)).~(~(min))~(~(such that valuea be Let 2.
path. NFDL thealong routed is input all if vector flowpath thebe Let 1.
.~at evaluated are sDerivative
pair. ODeach for path length derivativefirst minimum a find want toWe
vector.flowpath feasible a is x~ Assume
]1,0[
ppwp
wpppp
w
p
rxPpxWw
WwPpxxxx
xxxDxxxD
rx
xx
D(x)

descent. ofdirection optimalan is ~ resulting The
satisfied. is (1)such that )(
Minimize
:becomes problem The
negative.most is change of rate initial the, alongsuch that
(1) allfor 0
allfor 0
i.e.,,direction flowpath feasible a utilize willWe
,
xxx
xx
xD
x
WwPpxx
Wwx
x
pWw Pp p
wpp
Ppp
w
w

Example
0.for impossible is which 55.01.02
1 , ,
2
-1 ngSubstituti
.3
havemust we true,be toFor this .2
-1 , 2. Case
O.K. is which 0.552
1
2
1 0, ngSubstituti
.2,1for havemust we true,be toFor this .2
1 ,0 .1 Case
es.possibliti twoare There . havemust we, )( ofsymmetry theFrom
55.01.02
1)( :Given
. 3,2,1for 0 and 1
321
21213
213
3213
21
323
22
21
321
xxx
x
D(x)
x
D(x)
x
D(x)xxx
xxx
ix
D(x)
x
D(x)xxx
xxxD
xxxxxD
ixxxx
xxx
xix
i
r=1 r
1x
2x
3x

(0,1,0).or )0,0,1( is flowpath shortest
. if ispath shortest
. if ispath shortest
feasible. is vector theif 0.55 and 0.55 havecannot We
.55.0 because becannot path shortest Obviously
.55.01.0 , ,
Then, vector.feasible a be Let Algorithm. Wolfe-Frank apply the want toWe
212
211
21
11
33
33
22
11
x
xxx
xxx
x
D(x)x
x
D(x)x
x
D(x)x
xx
D(x)x
x
D(x)x
x
D(x)
x
21
3
312
1
3
2
1
3
2
1
3
2
1
21
3
2
321
3
2
1
3
2
1
3
2
1
if
)1(
)(
)1(
1
if
)1(
)1(
)(1
:equations Update
xx
x
xxx
x
x
x
x
x
x
x
x
x
x
xx
x
x
xxx
x
x
x
x
x
x
x
x
x

Topological Design
Design a data network at minimum cost while maintaining the performance requirements.
Assumptions
Locations of terminal are known.
Traffic level between each OD pair is known.
Selection
Topology of a communication sub network meeting the traffic demand.
Topology of local access network
Objectives
Satisfy the average delay per packet constraint for a given routing scheme.
Satisfy the reliability constraint with respect to node and link failures.
Minimize cost.
T T
TT N
N N
N
C
C
Access Network Subnet
Subnet Design
Given
Location of nodes
Traffic demand between nodes
Selections
Capacity of links
Flow of links
Simplifications
No reliability consideration
Linear cost

.cost Optimal . 1
11
,constraint theFrom y.numericall for now solvemust We
0Set
.multiplier Lagrange is where1
Let .1
i.e., ,constraint theofboundary at the be willsolution The
),(),(
2
),(),(),(
),(),(),(
*
jiijij
nm
mnmnijijijij
ji
ijij
ji
ijij
ji ijij
ij
ij
ijijij
ij
ji ijij
ij
jiijij
ji ijij
ij
ij
CPr
FP
r
FP
TFC
r
FP
Tr
FP
FC
F
rT
rP
FFC
dC
dL
FC
F
rCPLT
FC
F
r
C
.1
delay average given the , Minimize
) network, theinto arrival total: ),,(link per cost :( s'Known :1 Problem
),(),(
ji ijij
ij
jiijij
wijij
TFC
F
rCP
rrrjiPF

solve toproblemDifficult -
exist. solutions localMany -
convex.globally not isfunction This
0Set
unknown. are s' :2 Problem
)
(i,jijij
ij
ij
CPdF
d
F

Local Access Design
Problem 1
Sub network is available.
Design a network that connects a set of terminals to
. techniquegprogramminlinear aby solved becan problem This
. and 1Given
Minimize
otherwise 0
or concentrat toconnected is source if 1 -
or concentrat toconnected becan that nodes ofnumber maximum : -
or concentrat to source connecting ofcost : -
orsconcentratknown ally geographic -
sourcesknown ally geographic -
11
n
1i
m
1j
m
ijij
m
jij
ijij
ij
j
ij
j kx i x
xa
jix
jk
jia
m
n

problem.er much tough is This
. techniqueialcombinator aby solved becan problem This
. and 1Given
Minimize
none is thereif 0
siteat or conecntrat a is thereif 1 -
siteat or concentrat a locate cost to : -
ors.concentrayfor locations potential -
fixed.not orsconcentrat of locations -
sourcesknown ally geographic -
2 Problem
11
1 11
jykxix
ybxa
jy
jb
m
n
jj
n
jij
m
jij
n
i
m
jjj
m
jijij
j
j