Embed Size (px)
Citation preview
POLITECHNIKA WARSZAWSKA
Wydział Elektroniki i TechnikInformacyjnych
ROZPRAWA DOKTORSKA
mgr inż. Mateusz Malanowski
Optymalizacja przetwarzania sygnałów w radarach z pasywnąkoherentną lokalizacją obiektów
Promotordr hab. inż. Krzysztof Kulpa
Warszawa, 2009
Podziękowania
Pragnę wyrazić podziękowania mojemu promotorowi dr. hab. inż. Krzysztofowi
Kulpie, mojej żonie Magdalenie Purchli-Malanowskiej oraz kolegom z Zakładu Teorii
Obwodów i Sygnałów Instytutu Systemów Elektronicznych, którzy przyczynili się do
ostatecznego kształtu pracy.
Serdecznie dziękuję Fundacji Wspierania Radiokomunikacji i Technik Multime-
dialnych za wsparcie finansowe w postaci stypendium naukowego, które przyspieszyło
finalizację niniejszej rozprawy.
Praca była częściowo finansowana przez Ministerstwo Nauki i Szkolnictwa Wyż-
szego w ramach grantu nr 0031/B/T00/2008/35 oraz przez Unię Europejską w ramach
Europejskiego Funduszu Społecznego, projekt „Program Rozwojowy Politechniki War-
szawskiej”.
2
Streszczenie
W rozprawie przedstawiono zagadnienie optymalizacji parametrów przetwarzaniasygnałów w radarze z pasywną koherentną lokalizacją obiektów (ang. Passive CoherentLocation – PCL). Radar PCL, nazywany również radarem pasywnym, wykorzystujew celu detekcji obiektów zewnętrzne źródła promieniowania elektromagnetycznego,takie jak nadajniki radiowe, telewizyjne lub stacje bazowe telefonii komórkowej. Ra-diolokacja pasywna stanowi stosunkowo mało zbadany obszar wiedzy. Jednym z zagad-nień, które nie doczekały się dotychczas wystarczającej uwagi naukowców jest dobórparametrów przetwarzania zapewniających pożądane osiągi systemu. Temu tematowijest poświęcona niniejsza praca.
Celem rozprawy było opracowanie metod optymalizacji wybranych parametrów do-tyczących śledzenia obiektu. W pracy przeprowadzono analizę przetwarzania sygnałóww radarze pasywnym, uwzględniającą korelację, detekcję, estymację parametrów orazśledzenie we współrzędnych bistatycznych. Otrzymane związki umożliwiły sformuło-wanie konkretnych problemów optymalizacji. Do parametrów przetwarzania dobiera-nych optymalnie należały czas integracji, prawdopodobieństwo fałszywego alarmu orazparametry logiki inicjalizacji i kasowania trasy. Jako funkcje celu przyjęto średni czasinicjalizacji trasy oraz dokładność śledzenia, rozumianą jako odchylenie standardowebłędu estymacji bistatycznej odległości. Do wielkości, na które w czasie optymali-zacji narzucono ograniczenia, należały średnia częstość inicjalizacji trasy fałszywej,prawdopodobieństwo skasowania trasy prawdziwej po określonym czasie oraz średniczas kasowania trasy fałszywej. Ponadto nałożono kostkowe ograniczenia na wszystkieparametry przetwarzania.
W rezultacie uzyskano zestaw metod służących do wyznaczania wartości parame-trów przetwarzania sygnału zapewniających optymalne (w określonym sensie) osiągiradaru. Otrzymane w pracy wyniki można również wykorzystać do przewidywaniazachowania się radaru pasywnego w zależności od parametrów przetwarzania orazwłaściwości obserwowanych obiektów.
Uzyskane rezultaty teoretyczne zostały zweryfikowane za pomocą przeprowadzo-nych symulacji komputerowych. Wyniki symulacji potwierdziły zarówno poprawnośćanalizy teoretycznej, jak i słuszność przyjętych założeń upraszczających.
W pracy przedstawiono także wyniki przetwarzania rzeczywistego sygnału z radarupasywnego PaRaDe projektowanego w Instytucie Systemów Elektronicznych Politech-niki Warszawskiej przy istotnym wkładzie autora.
3
Abstract
In this thesis, the problem of optimization of signal processing parameters in passivecoherent location (PCL) radar is addressed. In order to detect targets, PCL radar, alsocalled passive radar, utilizes external sources of electromagnetic radiation, such as radioand television transmitters or cellular telephony base stations. Passive radar technologyis a relatively new field of knowledge. One of the issues, which did not receive muchattention among the scientists, is the choice of the values of processing parametersensuring desired system performance. This is the subject of this dissertation.
The objective of the dissertation was to develop methods for optimization of cer-tain parameters concerning target tracking. To accomplish this, the analysis of signalprocessing in passive radar was carried out, in which correlation, detection, parame-ter estimation and target tracking in the bistatic coordinates were taken into account.The obtained relationships allowed us to define concrete optimization problems. Thefollowing processing parameters were optimized: the integration time, the probabilityof false alarm and the parameters of track initialization and termination logic. Costfunctions were defined as the average track initialization time and the tracking accu-racy measured as the standard deviation of the estimation error of the bistatic range.The constraints included the average rate of false track initialization, the probability oftrue track termination and the average false track termination time. Furthermore, boxconstraints on all processing parameters have been imposed.
As a result, a set of methods for determining the values of processing parametersproviding optimal performance of the radar was obtained. The findings can also beused to predict performance of the passive radar depending on processing parametersas well as properties of observed targets.
The obtained theoretical results were verified via computer simulations. The resultsof simulation experiments showed both correctness of the theoretical analysis andpertinence of simplifying assumptions made during the analysis.
In the dissertation, the results of processing of real-life signals from the passiveradar system PaRaDe are presented as well. The system is being developed at theInstitute of Electronic Systems, Warsaw University of Technology, with a significantcontribution of the author.
4
Spis treści
1 Wstęp 121.1 Wprowadzenie . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 121.2 Motywacje . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 161.3 Cel i teza pracy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 171.4 Wkład własny . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 181.5 Układ pracy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
2 Zasada pracy radaru pasywnego 202.1 Źródła sygnału dla radaru pasywnego . . . . . . . . . . . . . . . . . . . . 202.2 Geometria bistatyczna . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222.3 Równanie zasięgu . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 252.4 Model sygnału odebranego . . . . . . . . . . . . . . . . . . . . . . . . . . 262.5 Funkcja nieoznaczoności . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
3 Etapy przetwarzania sygnału w radarze pasywnym 313.1 Odbiór sygnału . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 323.2 Formowanie wiązki . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 343.3 Wstępne przetwarzanie sygnału . . . . . . . . . . . . . . . . . . . . . . . 363.4 Filtracja adaptacyjna . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 373.5 Korelacja . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 403.6 Detekcja i estymacja parametrów . . . . . . . . . . . . . . . . . . . . . . 413.7 Śledzenie we współrzędnych bistatycznych . . . . . . . . . . . . . . . . . 433.8 Lokalizacja oraz śledzenie we współrzędnych kartezjańskich . . . . . . . 45
4 Analiza przetwarzania sygnałów w radarze pasywnym 474.1 Stosunek sygnału do szumu . . . . . . . . . . . . . . . . . . . . . . . . . 474.2 Prawdopodobieństwo fałszywego alarmu oraz prawdopodobieństwo de-
tekcji . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 504.3 Dokładność estymacji bistatycznych parametrów ruchu . . . . . . . . . . 53
5
Spis treści
4.4 Model dynamiczny ruchu obiektu oraz model pomiaru . . . . . . . . . . 544.5 Filtr Kalmana . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 584.6 Bramka asocjacyjna . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 614.7 Algorytm śledzenia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 624.8 Sformułowanie zagadnienia optymalizacji przetwarzania sygnałów . . . 624.9 Przegląd metod śledzenia obiektów . . . . . . . . . . . . . . . . . . . . . 66
4.9.1 Metody estymacji stanu . . . . . . . . . . . . . . . . . . . . . . . 664.9.2 Metody asocjacji danych . . . . . . . . . . . . . . . . . . . . . . 684.9.3 Metody inicjalizacji oraz kasowania trasy . . . . . . . . . . . . . 70
5 Optymalizacja przetwarzania sygnałów 745.1 Analiza inicjalizacji trasy . . . . . . . . . . . . . . . . . . . . . . . . . . . 75
5.1.1 Średni czas inicjalizacji trasy prawdziwej . . . . . . . . . . . . . 785.1.2 Częstość inicjalizacji trasy fałszywej . . . . . . . . . . . . . . . . 81
5.2 Analiza dokładności śledzenia . . . . . . . . . . . . . . . . . . . . . . . . 835.3 Analiza kasowania trasy . . . . . . . . . . . . . . . . . . . . . . . . . . . 91
5.3.1 Prawdopodobieństwo skasowania trasy prawdziwej . . . . . . . . 915.3.2 Średni czas kasowania trasy fałszywej . . . . . . . . . . . . . . . 93
5.4 Optymalizacja średniego czasu inicjalizacji trasy . . . . . . . . . . . . . 955.4.1 Optymalizacja czasu inicjalizacji trasy uśrednionego w prze-
dziale zmian SNRin . . . . . . . . . . . . . . . . . . . . . . . . . 1025.4.2 Równoległa struktura układu inicjalizacji tras . . . . . . . . . . . 104
5.5 Optymalizacja dokładności śledzenia . . . . . . . . . . . . . . . . . . . . 1085.6 Łączna optymalizacja średniego czasu inicjalizacji trasy i dokładności
śledzenia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1135.7 Ograniczenia i zakres stosowalności . . . . . . . . . . . . . . . . . . . . 115
6 Wyniki eksperymentów symulacyjnych 1206.1 Korelacja . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1206.2 Detekcja . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1226.3 Estymacja . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1236.4 Inicjalizacja trasy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1256.5 Śledzenie we współrzędnych bistatycznych . . . . . . . . . . . . . . . . . 1296.6 Kasowanie trasy . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134
7 Weryfikacja zaproponowanych metod za pomocą sygnałów rzeczywistych 1387.1 Eksperymentalny system pasywny PaRaDe . . . . . . . . . . . . . . . . 138
6
Spis treści
7.2 Analiza sygnałów rzeczywistych . . . . . . . . . . . . . . . . . . . . . . . 1407.3 Analiza inicjalizacji trasy . . . . . . . . . . . . . . . . . . . . . . . . . . . 1447.4 Analiza dokładności śledzenia . . . . . . . . . . . . . . . . . . . . . . . . 146
8 Podsumowanie i uwagi końcowe 151
9 Dodatki 1549.1 Rozkład prawdopodobieństwa wartości kwadratu modułu funkcji nie-
oznaczoności wzajemnej . . . . . . . . . . . . . . . . . . . . . . . . . . . 1549.2 Średni czas inicjalizacji trasy prawdziwej w strukturze równoległej . . . 155
Bibliografia 157
7

Wykaz stosowanych skrótów
CFAR – układ stabilizacji poziomu fałszywego alarmu(ang. Constant False Alarm Rate)
CUT – testowana komórka(ang. Cell Under Test)
DAB – standard radia cyfrowego(ang. Digital Audio Broadcasting)
DVB-T – standard telewizji cyfrowej naziemnej(ang. Digital Video Broadcasting–Terrestrial)
EKF – rozszerzony filtr Kalmana(ang. Extended Kalman Filter)
FFT – szybka transformata Fouriera(ang. Fast Fourier Transform)
FM – transmisja radiowa z modulacją częstotliwości(ang. Frequency Modulation)
FMCW – radar ze zmodulowaną falą ciągłą(ang. Frequency Modulated Continuous-Wave)
FPGA – programowalny układ logiczny(ang. Field Programmable Gate Array)
GPS – system nawigacji satelitarnej(ang. Global Positioning System)
HYCA – technika hybrydowego warunkowego uśredniania(ang. Hybrid Conditional Averaging)
IFF – system identyfikacji swój-obcy(ang. Identification Friend or Foe)
IMM – modele wzajemnie oddziałujące(ang. Interacting Multiple Models)
LMS – algorytm najmniejszego kwadratu(ang. Least Mean Square)
LSL – algorytm najmniejszych kwadratów w realizacji kratowej(ang. Least Squares Lattice)
MHT – śledzenie wielohipotezowe(ang. Multiple Hypothesis Tracking)
MIMO – układ o wielu wejściach i wielu wyjściach(ang. Multiple-Input and Multiple-Output)
8
Wykaz stosowanych skrótów
MMSE – kryterium minimum błędu średniokwadratowego(ang. Minimum Mean Square Error – MMSE)
NNF – algorytm najbliższego sąsiada(ang. Nearest Neighbor Filter)
OFDM – modulacja wykorzystująca wiele ortogonalnych podnośnych(ang. Orthogonal Frequency-Division Multiplexing)
PaRaDe – system pasywny opracowywany na Politechnice Warszawskiej(ang. Passive Radar Demonstrator)
PCR – pasywny radar trudnowykrywalny(ang. Passive Covert Radar)
PBR – pasywny radar bistatyczny(ang. Passive Bistatic Radar)
PCL – radar z pasywną koherentną lokalizacją obiektów(ang. Passive Coherent Location)
PDAF – probabilistyczny algorytm asocjacyjny(ang. Probabilistic Data Association Filter)
PNFR – stosunek maksimum do poziomu listków bocznych(ang. Peak-to-Noise-Floor Ratio)
PNNF – probabilistyczny algorytm najbliższego sąsiada(ang. Probabilistic Nearest Neighbor Filter)
RCS – powierzchnia skuteczna obiektu(ang. Radar Cross Section)
RLS – rekursywny algorytm najmniejszych kwadratów(ang. Recursive Least Squares)
ROC – charakterystyka operacyjna odbiornika(ang. Receiver Operating Characteristic)
SDR – odbiornik radiowy oparty na oprogramowaniu(ang. Software Defined Radio)
SNF – algorytm najsilniejszego sąsiada(ang. Strongest Neighbor Filter)
SNR – stosunek sygnału do szumu(ang. Signal-to-Noise Ratio)
TOC – charakterystyka operacyjna układu śledzenia(ang. Tracker Operating Characteristic)
9
Wykaz najważniejszych symboli
R – odległość bistatycznaV – prędkość bistatycznaA – przyspieszenie bistatycznefc – częstotliwość nośnaλ – długość falic – prędkość światłaB – szerokość pasma sygnałuPfa – prawdopodobieństwo fałszywego alarmuPd – prawdopodobieństwo detekcjiSNRin – stosunek sygnału do szumu przed korelacjąSNR – stosunek sygnału do szumu po korelacjiT – czas integracjiTc – średni czas potwierdzenia trasy prawdziwejNf – średnia częstość potwierdzania tras fałszywychTtrm – średni czas kasowania trasy fałszywejPtl – prawdopodobieństwo skasowania trasy prawdziwejσRT – miara dokładności śledzenia bistatycznej odległościx(k) – wektor stanu w filtrze Kalmanaz(k) – wektor pomiarowy w filtrze KalmanaQ – macierz kowariancji procesu w filtrze KalmanaR – macierz kowariancji błędu pomiaru w filtrze KalmanaF – macierz przejścia w filtrze KalmanaH – macierz transformacji wektora stanu na wektor pomiarowy w fil-
trze KalmanaP(k + 1|k) – macierz kowariancji estymaty stanu a priori w filtrze KalmanaP(k+1|k+1) – macierz kowariancji estymaty stanu a posteriori w filtrze KalmanaK(k) – wzmocnienie filtru KalmanaS(k) – macierz kowariancji wektora innowacji w filtrze KalmanaσR – odchylenie standardowe błędu pomiaru bistatycznej odległościσV – odchylenie standardowe błędu pomiaru bistatycznej prędkościσA – odchylenie standardowe rozrzutu wartości bistatycznego przyspie-
szenia∆R – rozmiar komórki rozróżnialności odległości bistatycznej∆V – rozmiar komórki rozróżnialności prędkości bistatycznej
10
Wykaz najważniejszych symboli
Rsp – zakres odległości bistatycznych, dla których obliczana jest funkcjanieoznaczoności
Vsp – zakres prędkości bistatycznych, dla których obliczana jest funkcjanieoznaczoności
NR – liczba komórek rozróżnialności odległościowejNV – liczba komórek rozróżnialności prędkościowejD – próg detekcjiMc – liczba wykryć w oknie obserwacji konieczna do inicjalizacji trasyNc – długość okna obserwacji przy inicjalizacji trasyMt – liczba wykryć w oknie obserwacji konieczna do skasowania trasyNt – długość okna obserwacji przy kasowaniu trasySs – stan początkowy łańcucha MarkowaSc – stan potwierdzenia trasy w łańcuchu MarkowaSt – stan skasowania trasy w łańcuchu Markowaπij – prawdopodobieństwo przejścia ze stanu i do stanu j w łańcuchu
MarkowaΠ – macierz prawdopodobieństw przejść w łańcuchu Markowaµi(k) – kumulacyjne prawdopodobieństwo osiągnięcia stanu i do chwili
k-tej w łańcuchu Markowami(k) – prawdopodobieństwo osiągnięcia stanu i w chwili k-tej w łańcuchu
Markowa
11
Rozdział 1
Wstęp
1.1 Wprowadzenie
Radar stał się obecnie niezastąpionym urządzeniem w wielu dziedzinach zarównomilitarnych, jak i cywilnych. Dzisiejsze zastosowania radaru mają o wiele szerszy za-kres, niż wskazywałoby na to pochodzenie nazwy: RAdio Detection And Ranging,oznaczającej urządzenie do wykrywania obiektów oraz określania ich odległości zapomocą fal radiowych. Współczesne radary są wykorzystywane również do pomiarukierunku ruchu i prędkości obiektu, przeprowadzania identyfikacji oraz tworzenia ob-razu powierzchni ziemi i obiektów [93], [89], [12].
Pomimo dynamicznego rozwoju radiolokacji przez ostatnie sto lat, nieustannie po-jawiają się nowe wyzwania i nowe kierunki badań. Jednym z nich są radary pasywne.W języku angielskim radary te określa się mianem Passive Coherent Location (PCL)[30], [39], Passive Bistatic Radar (PBR) [16], Passive Covert Radar (PCR) [51] lubkrótko – passive radar [104]. W tej pracy będzie stosowana nazwa: radar pasywny lubradar PCL.
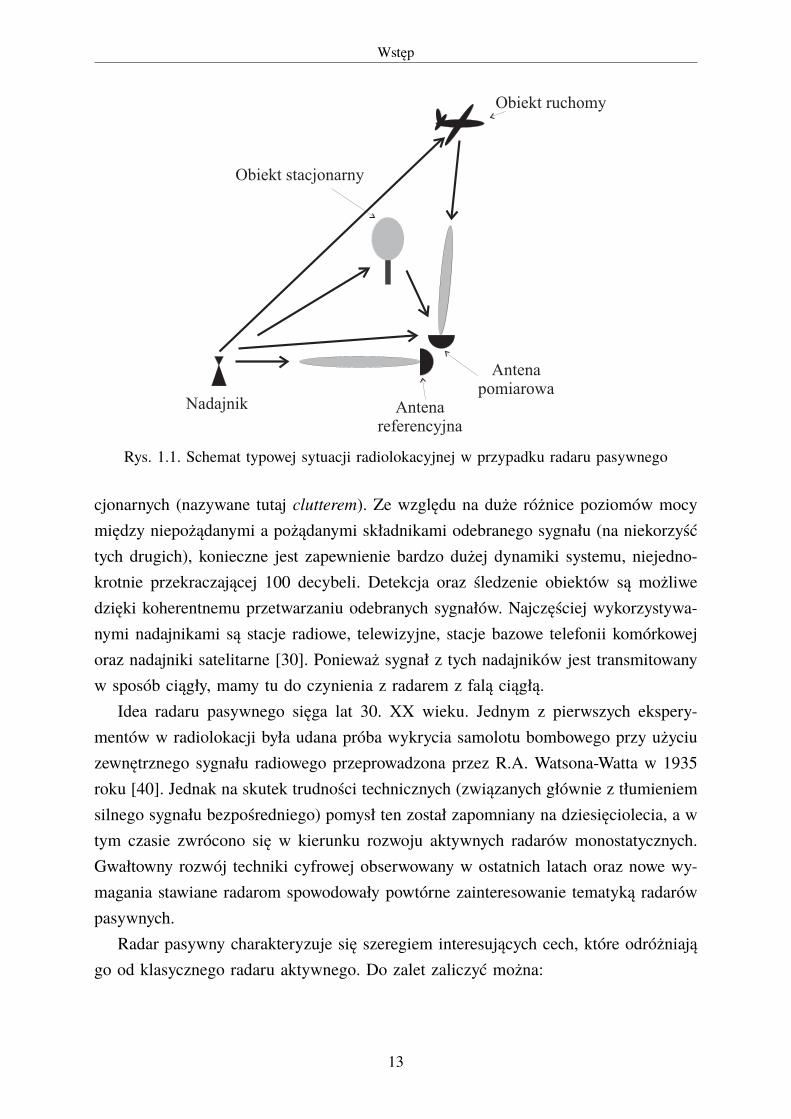
W celu detekcji oraz śledzenia obiektów ruchomych radary pasywne wykorzystująobce źródła promieniowania. Znane są także inne zastosowania radarów pasywnych,np. obserwacji jonosfery [84], [62] lub obrazowania powierzchni ziemi [35], ale wy-chodzą one poza tematykę tej pracy i nie będą w niej rozpatrywane. Schemat ideowyradarowego systemu pasywnego przedstawia rys. 1.1. Sygnał pomiarowy, odebranyza pomocą anteny skierowanej w stronę obszaru zainteresowania, jest porównywanyz sygnałem odniesienia pochodzącym z anteny referencyjnej skierowanej bezpośred-nio na źródło sygnału. Antena pomiarowa, oprócz interesujących ech obiektów latają-cych, odbiera również sygnał bezpośredni oraz odbicia pochodzące od obiektów sta-
12
Wstęp
Nadajnik Antenareferencyjna
Antenapomiarowa
Obiekt ruchomy
Obiekt stacjonarny
Rys. 1.1. Schemat typowej sytuacji radiolokacyjnej w przypadku radaru pasywnego
cjonarnych (nazywane tutaj clutterem). Ze względu na duże różnice poziomów mocymiędzy niepożądanymi a pożądanymi składnikami odebranego sygnału (na niekorzyśćtych drugich), konieczne jest zapewnienie bardzo dużej dynamiki systemu, niejedno-krotnie przekraczającej 100 decybeli. Detekcja oraz śledzenie obiektów są możliwedzięki koherentnemu przetwarzaniu odebranych sygnałów. Najczęściej wykorzystywa-nymi nadajnikami są stacje radiowe, telewizyjne, stacje bazowe telefonii komórkowejoraz nadajniki satelitarne [30]. Ponieważ sygnał z tych nadajników jest transmitowanyw sposób ciągły, mamy tu do czynienia z radarem z falą ciągłą.
Idea radaru pasywnego sięga lat 30. XX wieku. Jednym z pierwszych ekspery-mentów w radiolokacji była udana próba wykrycia samolotu bombowego przy użyciuzewnętrznego sygnału radiowego przeprowadzona przez R.A. Watsona-Watta w 1935roku [40]. Jednak na skutek trudności technicznych (związanych głównie z tłumieniemsilnego sygnału bezpośredniego) pomysł ten został zapomniany na dziesięciolecia, a wtym czasie zwrócono się w kierunku rozwoju aktywnych radarów monostatycznych.Gwałtowny rozwój techniki cyfrowej obserwowany w ostatnich latach oraz nowe wy-magania stawiane radarom spowodowały powtórne zainteresowanie tematyką radarówpasywnych.
Radar pasywny charakteryzuje się szeregiem interesujących cech, które odróżniajągo od klasycznego radaru aktywnego. Do zalet zaliczyć można:
13
Wstęp
• Niski koszt budowy oraz utrzymania. Ponieważ radar pasywny nie posiada nadaj-nika oraz towarzyszących mu złożonych części sterujących, jego konstrukcja jestdużo prostsza niż klasycznego radaru aktywnego. Ponadto częstotliwości wyko-rzystywane w radarach pasywnych są zazwyczaj dużo niższe w porównaniu z ra-darami aktywnymi (kilkadziesiąt lub kilkaset megaherców w radarach pasywnychprzy kilku gigahercach w radarach aktywnych), co eliminuje konieczność stoso-wania skomplikowanych i drogich części mikrofalowych w układzie odbiorczym.Również koszt utrzymania radaru pasywnego jest mniejszy, gdyż nie posiada onruchomych części w układzie antenowym oraz podatnych na uszkodzenie ukła-dów nadawczych;
• Niewykrywalność. Z uwagi na fakt, że radar pasywny nie posiada nadajnika,nie można go wykryć i zlokalizować na podstawie emitowanej energii. Z koleinadajniki używane do celów radiolokacji pasywnej emitują sygnał w sposób cią-gły i ich główne przeznaczenie jest inne niż wykrywanie obiektów. Dlatego teżobserwator nie jest w stanie rozróżnić, które sygnały są wykorzystywane w ce-lach detekcji obiektów, a które nie. Ta cecha jest szczególnie korzystna z punktuwidzenia zastosowań militarnych;
• Brak konieczności alokacji odrębnego pasma częstotliwości. Radar pasywny ko-rzysta z istniejących już nadajników, co eliminuje konieczność ubiegania sięo zgodę na emisję w danym paśmie częstotliwości. W dobie dzisiejszego du-żego zapotrzebowania na pasmo elektromagnetyczne cecha ta jest szczególnieistotna;
• Możliwość wykrywania obiektów typu stealth (obiektów trudno wykrywalnychprzez radar) [29]. Obiekty typu stealth są projektowane w taki sposób, aby zmini-malizować prawdopodobieństwo wykrycia przez radar poprzez zmniejszanie ichpowierzchni skutecznej (ang. Radar Cross Section – RCS). Efekt ten osiąga się,stosując specjalne materiały, którymi pokrywana jest powierzchnia obiektu, orazspecjalnie kształtując obiekt. Zwykle radary pasywne pracują na dużo niższychczęstotliwościach niż ich odpowiedniki aktywne, co w znaczący sposób zmniejszaefektywność zastosowanych materiałów w absorbowaniu padającego promienio-wania elektromagnetycznego. Z kolei specyficzne kształty obiektu stealth mająna celu odbicie padającego promieniowania w stronę inną niż tę, z której zostałowyemitowane. Taki zabieg jest skuteczny w przypadku radarów monostatycznych,gdzie nadajnik i odbiornik znajdują się w tym samym miejscu. Radar pasywnycharakteryzuje się geometrią bistatyczną (lub multistatyczną), a więc odbicie ener-
14
Wstęp
gii w kierunku innymi niż kierunek nadajnika nie musi oznaczać zmniejszeniaprawdopodobieństwa wykrycia;
• Duża częstotliwość odświeżania informacji. W aktywnym monostatycznym rada-rze, działającym w trybie track-while-scan, częstotliwość odświeżania informacjio obiekcie jest zależna od szybkości obracania się anteny. Czas ten wynosi za-zwyczaj od kilku do kilkudziesięciu sekund. W radarze pasywnym częstotliwośćodświeżania danych jest zależna od ustalonej przez projektanta systemu długościbloku przetwarzanych danych. Typowo przetwarza się bloki danych o długości oddziesiątych części sekundy do kilku sekund. Zatem szybkość odświeżania danychjest dużo większa niż w klasycznym radarze, co ma korzystny wpływ na jakośćśledzenia obiektów;
• Brak niejednoznaczności pomiaru odległości i prędkości. W sytuacji idealnej,gdy nadawany sygnał ma charakter podobny do szumowego i nie zawiera żadnychskładników okresowych, pomiar odległości oraz prędkości obiektu dokonywanymetodą korelacyjną jest jednoznaczny. Oznacza to, że nie występują tutaj zjawi-ska typowe dla radarów impulsowych, gdzie konieczne jest wybranie rozwiązaniakompromisowego między dużym zakresem jednoznaczności pomiaru odległości(mała częstotliwość powtarzania impulsów) a dużym zakresem jednoznaczno-ści pomiaru prędkości (duża częstotliwość powtarzania impulsów). W praktycewykorzystywane sygnały, zwłaszcza cyfrowe, mogą zawierać pewne składnikiokresowe, co może stać się źródłem niejednoznaczności pomiaru, jednak znanesą metody przeciwdziałania takim efektom.
Radar pasywny posiada także szereg wad:
• Zależność od zewnętrznych nadajników. Użytkownik radaru pasywnego nie mawpływu na postać nadawanego sygnału ani na rozmieszczenie, moc i inne para-metry nadajników. Sygnały wykorzystywane w systemach telekomunikacyjnychsą projektowane z myślą o przekazywaniu informacji, a nie o detekcji obiektów.Dlatego też sygnały te mogą być nieoptymalne z punku widzenia radiolokacji.Ponadto ustalone rozmieszczenie nadajników może w istotny sposób ograniczyćpozycję odbiornika, korzystną ze względu na ukształtowanie terenu lub propaga-cję fal elektromagnetycznych;
• Niski stopień zaawansowania technologii. Proces projektowania oraz wytwarzaniaaktywnych radarów monostatycznych był doskonalony przez całe dekady. Obec-nie można uznać, iż jest to technologia dobrze znana i opracowana. Sytuacja wy-
15
Wstęp
gląda inaczej w przypadku radarów pasywnych. Wiele problemów związanychnp. z detekcją lub śledzeniem obiektów jest wciąż nie do końca rozwiązanych.Może to stanowić poważną wadę z punktu widzenia użytkownika końcowego,który oczekuje niezawodnego i sprawdzonego produktu;
• Skomplikowane przetwarzanie sygnałów. Na proces przetwarzania sygnałów w ra-darze pasywnym składa się wiele etapów, które nie mają swojego odpowiednikaw klasycznym przetwarzaniu sygnału radiolokacyjnego. Przykładem może tu byćfiltracja adaptacyjna czy lokalizacja obiektów na podstawie pomiarów z wielu parnadajnik-odbiornik. Te dodatkowe operacje prowadzą do dosyć dużej komplikacjiprocesu przetwarzania sygnału, co wiąże się też ze wzrostem zapotrzebowaniana moc obliczeniową.
W świetle przedstawionych właściwości radaru pasywnego powstaje pytanie o moż-liwości użycia tego typu radaru w praktyce. Z punktu widzenia zastosowań militarnychbardzo ważnymi cechami są niewykrywalność oraz możliwość detekcji obiektów typustealth. Wątpliwości może budzić skuteczność działania systemu pasywnego podczaskonfliktu zbrojnego, zwłaszcza na terenie wroga. W czasie wojny nadajniki wyko-rzystywane przez system pasywny są nie tylko poza bezpośrednią kontrolą operatoraradaru, ale mogą też znaleźć się w rękach wroga i zostać całkowicie wyłączone. Eks-perci są zdania, że mimo tych wad radar pasywny jest atrakcyjnym rozwiązaniem dlawojska, gdyż możliwe jest np. wykorzystanie nadajników znajdujących się na tereniesąsiednich krajów, nie objętych działaniami zbrojnymi [5].
Z punktu widzenia zastosowań cywilnych i przez służby państwowe (policja, strażgraniczna) niski koszt systemu pasywnego wydaje się być najbardziej istotną cechą.Według autora systemy pasywne stanowią doskonałe uzupełnienie systemów aktyw-nych, szczególnie w zastosowaniach militarnych. Ponadto niski koszt radaru pasyw-nego może pozwolić na jego zakup przez jednostki lub instytucje, w których radarnie jest niezbędny, ale pożądany. Do takich instytucji można zaliczyć duże fabryki,ośrodki rządowe, elektrownie (zwłaszcza atomowe) itp., gdzie radar stanowiłby istotnączęść systemu ochrony.
1.2 Motywacje
Motywacje autora do podjęcia badań nad zagadnieniami opisanymi w pracy wyni-kają z dwóch głównych przesłanek. Pierwszą z nich była chęć udoskonalenia rzeczywi-stego radaru pasywnego PaRaDe (ang. Passive Radar Demonstrator) [81], [77], [79].
16
Wstęp
Radar ten, opracowany w Instytucie Systemów Elektronicznych Politechniki Warszaw-skiej przy istotnym wkładzie autora, jest pierwszym w Polsce systemem pasywnym.Wstępne testy i pomiary wykonane za pomocą radaru wykazały, iż dobór parametrówprzetwarzania, takich jak długość przetwarzanego bloku danych czy próg detekcji, mająistotny wpływ na osiągi systemu. Zawiłość zależności między poszczególnymi etapamiprzetwarzania a ich parametrami stanowiła motywację do podjęcia prac mających nacelu usystematyzowanie oraz sformalizowanie metod analizy systemów pasywnych. Napodstawie opracowanych metod analizy możliwe jest stworzenie narzędzi pozwalają-cych na optymalizację osiągów systemu w określonym sensie. Z kolei optymalizacjaprzetwarzania sygnałów w znaczący sposób przyczynia się do zwiększenia funkcjonal-ności oraz wartości użytkowej radaru.
Drugą przesłanką jest znikoma liczba publikacji w literaturze fachowej dotyczącychłącznej analizy pracy radaru jako systemu złożonego z wielu bloków przetwarzania.W opinii autora jest to bardzo istotny temat, a uzyskane w wyniku takiej analizy rezul-taty pozwalają na znaczącą poprawę osiągów systemu. Proces przetwarzania sygnałóww radarze składa się z wielu etapów, takich jak detekcja, estymacja czy śledzenie,a każdy z nich jest zwykle analizowany osobno. Podejście takie prowadzi do wyników,które mogą być dalekie od optymalnych z punktu widzenia całego systemu. Łącznaanaliza pozwala na zbadanie wpływu parametrów poszczególnych części systemu nawybrane osiągi końcowe, np. dokładność określenia pozycji.
1.3 Cel i teza pracy
Celem niniejszej rozprawy jest opracowanie metod optymalizacji wybranych osią-gów radaru pasywnego poprzez odpowiedni dobór parametrów przetwarzania sygna-łów. Do optymalizowanych parametrów systemu należą średni czas inicjalizacji (po-twierdzenia) trasy bistatycznej oraz dokładność śledzenia bistatycznej odległości. Po-nadto nakładane są ograniczenia na maksymalną częstość potwierdzania tras fałszy-wych, maksymalne prawdopodobieństwo skasowania trasy prawdziwej oraz średni czaskasowania trasy fałszywej. Parametry przetwarzania sygnałów dobierane w procesieoptymalizacji to czas integracji sygnału, prawdopodobieństwo fałszywego alarmu orazparametry algorytmu inicjalizacji i kasowania trasy.
Główne tezy pracy można sformułować następująco:
17
Wstęp
Możliwe jest dobranie takich parametrów układu inicjalizacji trasy w radarze pa-sywnym, aby zminimalizować średni czas potrzebny na potwierdzenie trasy prawdziwejprzy założonej częstości inicjalizacji tras fałszywych.
Możliwe jest dobranie takich parametrów przetwarzania sygnałów w radarze pa-sywnym, aby zminimalizować błąd śledzenia bistatycznej odległości przy zachowaniuokreślonego prawdopodobieństwa skasowania trasy prawdziwej po ustalonym czasieoraz średniego czasu życia trasy fałszywej.
W pracy przedstawiono zarówno oddzielną optymalizację średniego czasu potwier-dzenia trasy i dokładności śledzenia, jak również optymalizację łączną, obejmującąobydwie wielkości i wszystkie ograniczenia.
1.4 Wkład własny
Do głównych dokonań własnych autora zaliczyć można:
• Przeprowadzenie kompleksowej analizy przetwarzania sygnałów w radarze pa-sywnym;
• Rozszerzenie znanej z literatury [14], [9] analizy łańcuchów Markowa do wy-znaczenia parametrów kasowania trasy, tj. prawdopodobieństwa skasowania trasyprawdziwej po określonym czasie oraz średniego czasu kasowania trasy fałszy-wej;
• Zaproponowanie doboru parametrów przetwarzania sygnałów w celu optymali-zacji wybranych wskaźników w radarze pasywnym;
• Zaproponowanie równoległej struktury układu inicjalizacji trasy;
• Wykorzystanie znanych z literatury wzorów określających uśrednione zachowaniesię algorytmu najbliższego sąsiada (ang. Nearest Neighbor Filter – NNF) [60]w celu optymalizacji dokładności śledzenia;
• Współudział w konstrukcji demonstratora radaru pasywnego PaRaDe, wykorzy-stanego do rejestracji sygnałów rzeczywistych;
• Weryfikację wybranych wyników za pomocą rzeczywistych sygnałów pochodzą-cych z radaru pasywnego.
18
Wstęp
1.5 Układ pracy
Praca jest podzielona na osiem rozdziałów. W rozdziale drugim podano podsta-wowe informacje na temat radaru pasywnego, a w szczególności omówiono cechyodróżniające go od klasycznego monostatycznego radaru aktywnego. Opisano tutajmiędzy innymi źródła sygnału wykorzystywane w radiolokacji pasywnej, geometriębistatyczną oraz równanie zasięgu w formie bistatycznej.
Rozdział trzeci zawiera opis poszczególnych etapów przetwarzania sygnału w ra-darze pasywnym, na które składa się: odbiór sygnału, formowanie wiązki, wstępneprzetwarzania sygnału, filtracja adaptacyjna, korelacja, detekcja i estymacja parame-trów, śledzenie we współrzędnych bistatycznych oraz lokalizacja obiektów.
W rozdziale czwartym przedstawiono analizę wiążącą parametry systemu na róż-nych etapach przetwarzania: korelacji, detekcji, estymacji i śledzenia. Ponadto zamiesz-czono krótki przegląd algorytmów stosowanych w celu śledzenia obiektów przez radarze wskazaniem na metody stosowane w pracy.
W rozdziale piątym wyprowadzono zależności opisujące średni czas inicjalizacjitrasy prawdziwej, częstość inicjalizacji trasy fałszywej, dokładność śledzenia, praw-dopodobieństwo skasowania trasy prawdziwej po określonym czasie oraz średni czaskasowania trasy fałszywej. Wyznaczone zależności są następnie użyte w celu sformu-łowania oraz rozwiązania dwóch problemów optymalizacji: minimalizacji średniegoczasu inicjalizacji trasy oraz minimalizacji miary dokładności śledzenia. W ostatniejczęści rozdziału przedstawiono rozwiązanie problemu łącznej optymalizacji czasu ini-cjalizacji trasy oraz dokładności śledzenia.
W rozdziale szóstym przedstawiono wyniki symulacji komputerowych. Celem eks-perymentów było potwierdzenie słuszności istotnych założeń przyjętych w pracy, jakrównież weryfikacja wyników analizy teoretycznej.
W rozdziale siódmym zaprezentowano wyniki przetwarzania sygnałów rzeczywi-stych zarejestrowanych za pomocą radaru PaRaDe. Dane pochodzące z radaru posłużyłydo potwierdzenia wybranych wyników otrzymanych w pracy.
W rozdziale ósmym przedstawiono uwagi końcowe oraz wnioski.
19
Rozdział 2
Zasada pracy radaru pasywnego
W rozdziale omówiono zasadę działania radaru pasywnego, z uwzględnieniemaspektów odróżniających go od klasycznego monostatycznego radaru aktywnego. W szcze-gólności omówiono zewnętrzne źródła promieniowania wykorzystywane przez radarypasywne oraz geometrię bistatyczną związaną z fizycznym odseparowaniem nadajnikai odbiornika.
2.1 Źródła sygnału dla radaru pasywnego
Radar pasywny może wykorzystywać rozmaite źródła promieniowania. Na przydat-ność danego źródła energii z punku widzenia radiolokacji pasywnej wpływają przedewszystkim moc nadajnika, szerokość pasma sygnału, częstotliwość pracy oraz rodzajnadawanego sygnału. Moc nadajnika decyduje o zasięgu systemu, który wynika z bista-tycznego równania zasięgu (por. p. 2.3). Szerokość pasma sygnału wpływa na rozdziel-czość odległościową systemu. Z kolei częstotliwość pracy określa tłumienie sygnału.
Istotną kwestią jest również postać sygnału pochodzącego z zewnętrznego źródłapromieniowania, w tym rodzaj zastosowanej modulacji. Z punktu widzenia odbioru ko-relacyjnego, jaki jest typowo stosowany w radarach pasywnych, najbardziej korzystnyjest sygnał o charakterze szumowym. Sygnał taki zapewnia wąskie maksimum mo-dułu funkcji korelacji oraz niski poziom jego listków bocznych. Do oceny właściwościsygnału wykorzystywanego przez radar pasywny stosuję się zwykle funkcję nieozna-czoności (por. p. 2.5).
Jako jedne z pierwszych źródeł promieniowania w radiolokacji pasywnej wykorzy-stywane były nadajniki telewizji analogowej [33], [38]. Sygnał telewizyjny charaktery-zuje się stosunkowo szerokim pasmem (ok. 8 MHz), a nadawana moc (rzędu kilkudzie-
20
Zasada pracy radaru pasywnego
sięciu lub kilkuset kilowatów) zapewnia dobre pokrycie terenu. Jednakże duża częśćmocy sygnału jest zgromadzona w wąskim otoczeniu częstotliwości nośnej, przez coefektywna rozdzielczość odległościowa jest niska. Ponadto specyficzna struktura sy-gnału, wykazująca cechy okresowości związanej z kolejnymi liniami oraz klatkamiobrazu, powoduje powstawanie powtarzających się maksimów w funkcji korelacji, cow istotny sposób utrudnia jednoznaczną detekcję obiektów. Wprawdzie były prowa-dzone prace nad systemami pasywnymi wykorzystującymi sygnał telewizyjny tylkow celu estymacji kierunku nadejścia sygnału oraz częstotliwości dopplerowskiej [38],jednak ten typ transmisji nie jest współcześnie chętnie wykorzystywany w radiolokacji.
Obecnie dosyć dużą popularnością cieszą się nadajniki analogowego radia FM (ang.Frequency Modulation) działające w paśmie 88–108 MHz. Dzięki ich dużej liczbieoraz stosunkowo dużej mocy (typowo kilkadziesiąt kilowatów) zapewniają one dobrepokrycie terenu. Sygnał radia FM posiada funkcję nieoznaczoności o wąskim listkugłównym oraz niskim poziomie listków bocznych, co ułatwia proces detekcji. Do wadsygnału radia analogowego FM zaliczyć można małą szerokość pasma wynoszącą odkilkudziesięciu do kilkuset kiloherców, co odpowiada rozdzielczości kilku kilometrów.Ponadto szerokość pasma zależy od treści aktualnie nadawanego programu; dla sygnałumowy jest mała, dla szybkiej muzyki duża [6]. Pomimo wymienionych wad, nadajnikiradia FM pozwalają na budowę systemu pasywnego charakteryzującego się dobrymiosiągami, o czym świadczą liczne przykłady konstrukcji na całym świecie [39], [86],[51], [91], [53], [77].
Zgodnie z ogólnie postępującym trendem technika nadawania i odbioru analogo-wego jest stopniowo wypierana przez metody cyfrowe. Radio analogowe FM jest za-stępowane systemem DAB (ang. Digital Audio Broadcasting), a telewizja analogowaprzez system DVB-T (ang. Digital Video Broadcasting – Terrestrial). W rezultaciepowstają również radary pasywne wykorzystujące sygnały transmitowane w tych sys-temach [28], [16], [50], [91]. W obydwu systemach stosowana jest modulacja OFDM(ang. Orthogonal Frequency Division Multiplexing). Zmodulowane sygnały wykazującechy sygnału szumowego (pasmowego), chociaż stosowane częstotliwości pilotoweoraz prefiksy powodują powstawanie niepożądanych w radiolokacji okresowości funk-cji korelacji. Wymusza to konieczność wstępnego przetwarzania sygnałów OFDM,mającego na celu usunięcie z nich wybranych składowych [97].
Oprócz wymienionych już typów transmisji wykorzystuje się także telefonię ko-mórkową [104], [63], [78] oraz nadajniki satelitarne [43], [35], [15], [31]. Porównanieróżnych typów nadajników pod kątem wykorzystania przez radar pasywny, uwzględ-
21
Zasada pracy radaru pasywnego
niające nadawaną moc, szerokość pasma sygnału, częstotliwość nośną oraz stosowanytyp modulacji, można znaleźć w [30] i [29].
Obecnie na świecie prowadzi się intensywne prace nad wykorzystaniem sygna-łów z modulacją cyfrową do celów radiolokacji pasywnej. W Polsce, ze względu nawolno postępujące wdrażanie systemów cyfrowych, głównym źródłem sygnału dla ra-daru pasywnego pozostają nadal nadajniki analogowe FM. W chwili pisania pracyfunkcjonowały jedynie testowe nadajniki DVB-T o małej mocy zlokalizowane w du-żych miastach. Transmisja cyfrowego radia DAB jeszcze nie została wdrożona. Z tegowzględu w pracy rozważania będą prowadzone dla parametrów typowych dla sygnałuradia analogowego FM (ponieważ jest ono powszechne obecnie) oraz telewizji cyfro-wej DVB-T (ponieważ będzie ona powszechna w niedalekiej przyszłości). Z uwagi naograniczoną dostępność źródeł sygnału DVB-T opracowane algorytmy zostały przete-stowane na danych rzeczywistych pochodzących z nadajników radia FM. W tablicy 2.1zestawiono typowe wartości parametrów dla wymienionych typów transmisji.
Parametr Radio FM Telewizja DVB-TRodzaj modulacji FM OFDM
Szerokość pasma (B) 50 kHz 8 MHzCzęstotliwość nośna (fc) 100 MHz 600 MHz
Długość fali (λ) 3 m 0.5 mMoc nadajnika (Pt) 10–100 kW 1–50 kW
Tablica 2.1. Typowe wartości parametrów sygnału radia FM oraz telewizji DVB-T
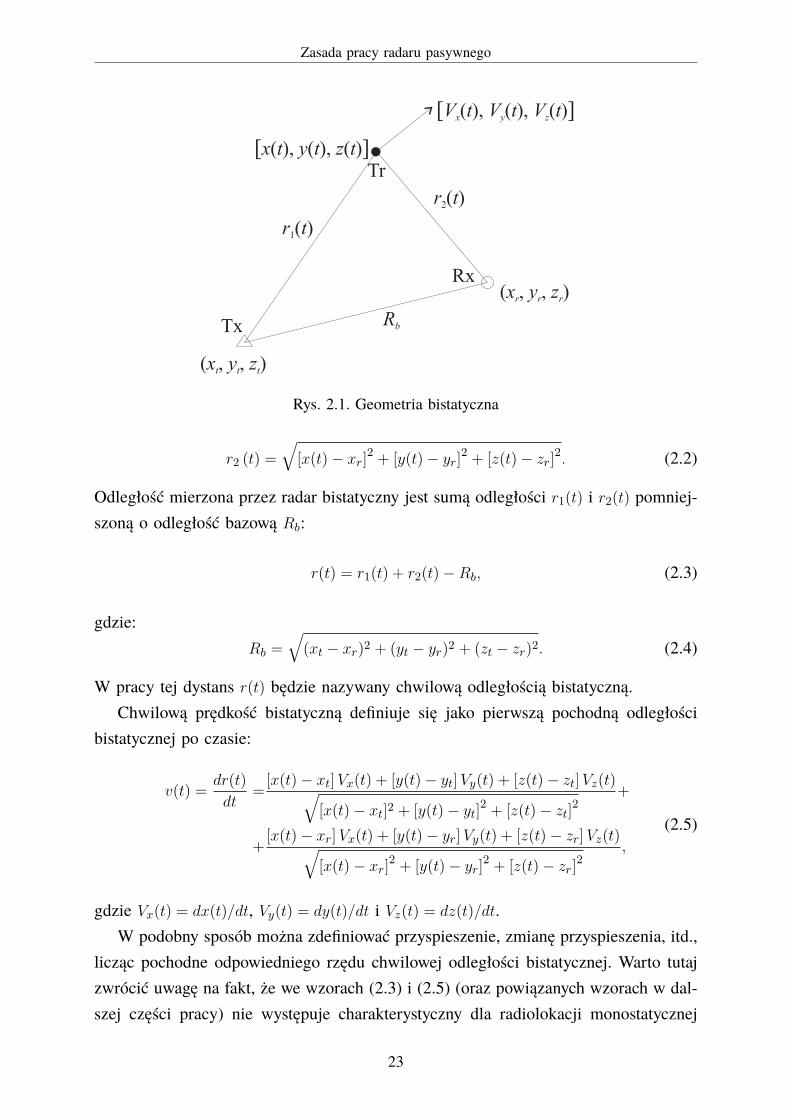
2.2 Geometria bistatyczna
W klasycznym radarze aktywnym nadajnik i odbiornik znajdują się w tym samymmiejscu. Mamy więc do czynienia z geometrią monostatyczną. W radarze pasywnymodbiornik jest zwykle zlokalizowany w innym miejscu niż nadajnik, zatem występujetu geometria bistatyczna. W celu przeanalizowania geometrii bistatycznej wykorzy-stany zostanie rys. 2.1. Nadajnik (Tx) znajduje się na współrzędnych (xt, yt, zt), od-biornik (Rx) na współrzędnych (xr, yr, zr), natomiast obiekt (Tr) na współrzędnych[x(t), y(t), z(t)], a jego wektor prędkości wynosi [Vx(t), Vy(t), Vz(t)]. Zakłada się, że po-zycja nadajnika i odbiornika jest stała. Pozycja obiektu zmienia się z czasem. Odległo-ści od nadajnika do obiektu oraz od obiektu do odbiornika wyrażone są następującymiwzorami:
r1 (t) =
√[x(t)− xt]2 + [y(t)− yt]2 + [z(t)− zt]2, (2.1)
22
Zasada pracy radaru pasywnego
r t1( )
r t2( )
RbTx
Tr
Rx( , , )x y zr r r
( , , )x y zt t t
[ ]x t y t z t( ), ( ), ( )
[ ]V t V t V tx y z( ), ( ), ( )
Rys. 2.1. Geometria bistatyczna
r2 (t) =
√[x(t)− xr]2 + [y(t)− yr]2 + [z(t)− zr]2. (2.2)
Odległość mierzona przez radar bistatyczny jest sumą odległości r1(t) i r2(t) pomniej-szoną o odległość bazową Rb:
r(t) = r1(t) + r2(t)−Rb, (2.3)
gdzie:Rb =
√(xt − xr)2 + (yt − yr)2 + (zt − zr)2. (2.4)
W pracy tej dystans r(t) będzie nazywany chwilową odległością bistatyczną.Chwilową prędkość bistatyczną definiuje się jako pierwszą pochodną odległości
bistatycznej po czasie:
v(t) =dr(t)
dt=
[x(t)− xt]Vx(t) + [y(t)− yt]Vy(t) + [z(t)− zt]Vz(t)√[x(t)− xt]2 + [y(t)− yt]2 + [z(t)− zt]2
+
+[x(t)− xr]Vx(t) + [y(t)− yr]Vy(t) + [z(t)− zr]Vz(t)√
[x(t)− xr]2 + [y(t)− yr]2 + [z(t)− zr]2,
(2.5)
gdzie Vx(t) = dx(t)/dt, Vy(t) = dy(t)/dt i Vz(t) = dz(t)/dt.W podobny sposób można zdefiniować przyspieszenie, zmianę przyspieszenia, itd.,
licząc pochodne odpowiedniego rzędu chwilowej odległości bistatycznej. Warto tutajzwrócić uwagę na fakt, że we wzorach (2.3) i (2.5) (oraz powiązanych wzorach w dal-szej części pracy) nie występuje charakterystyczny dla radiolokacji monostatycznej
23
Zasada pracy radaru pasywnego
współczynnik „2” wynikający z drogi pokonywanej przez sygnał od radaru do obiektui z powrotem.
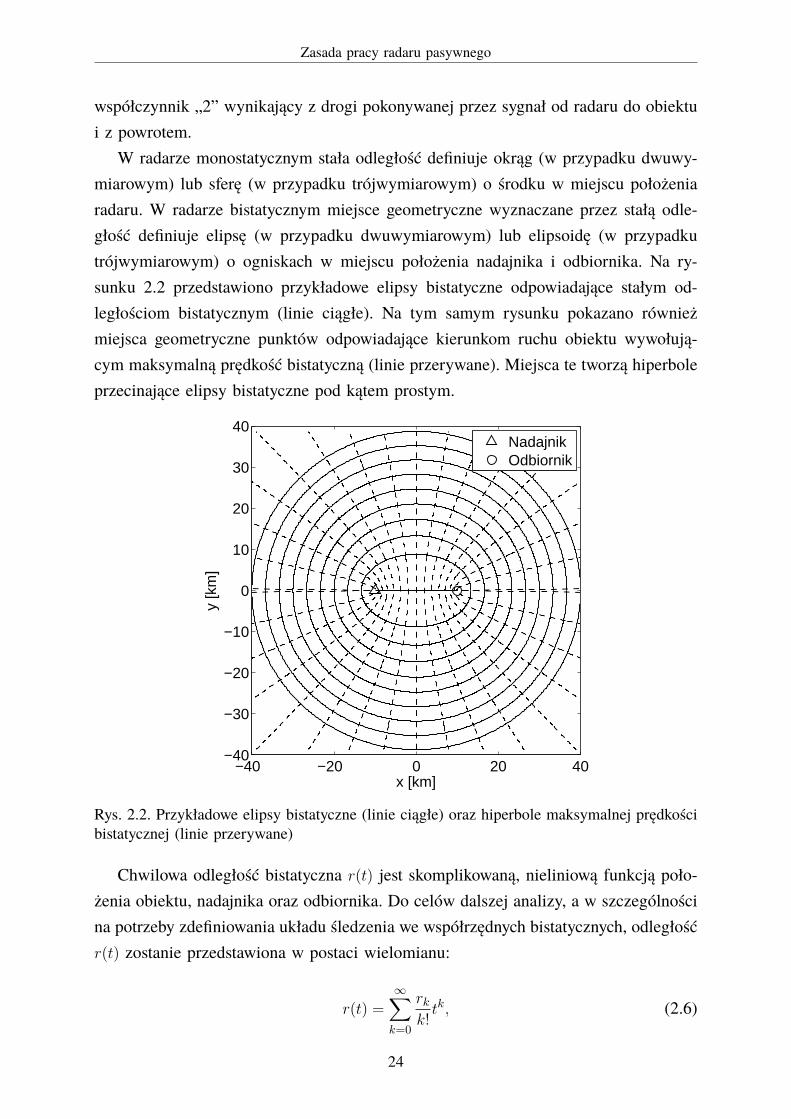
W radarze monostatycznym stała odległość definiuje okrąg (w przypadku dwuwy-miarowym) lub sferę (w przypadku trójwymiarowym) o środku w miejscu położeniaradaru. W radarze bistatycznym miejsce geometryczne wyznaczane przez stałą odle-głość definiuje elipsę (w przypadku dwuwymiarowym) lub elipsoidę (w przypadkutrójwymiarowym) o ogniskach w miejscu położenia nadajnika i odbiornika. Na ry-sunku 2.2 przedstawiono przykładowe elipsy bistatyczne odpowiadające stałym od-ległościom bistatycznym (linie ciągłe). Na tym samym rysunku pokazano równieżmiejsca geometryczne punktów odpowiadające kierunkom ruchu obiektu wywołują-cym maksymalną prędkość bistatyczną (linie przerywane). Miejsca te tworzą hiperboleprzecinające elipsy bistatyczne pod kątem prostym.
−40 −20 0 20 40−40
−30
−20
−10
0
10
20
30
40
x [km]
y [k
m]
NadajnikOdbiornik
Rys. 2.2. Przykładowe elipsy bistatyczne (linie ciągłe) oraz hiperbole maksymalnej prędkościbistatycznej (linie przerywane)
Chwilowa odległość bistatyczna r(t) jest skomplikowaną, nieliniową funkcją poło-żenia obiektu, nadajnika oraz odbiornika. Do celów dalszej analizy, a w szczególnościna potrzeby zdefiniowania układu śledzenia we współrzędnych bistatycznych, odległośćr(t) zostanie przedstawiona w postaci wielomianu:
r(t) =∞∑k=0
rkk!tk, (2.6)
24
Zasada pracy radaru pasywnego
gdzie rk to współczynniki określone następującą zależnością:
rk =dkr(t)
dtk
∣∣∣t=0
. (2.7)
W ogólnym przypadku jest to wielomian nieskończonego stopnia. Jednak na poszcze-gólnych etapach przetwarzania przyjmuje się pewne upraszczające założenia co do po-staci odległości bistatycznej, co zostanie wyraźnie zaznaczone w dalszej części pracy.
Przyjęte zostaną następujące oznaczenia: r0 = R (bistatyczna odległość), r1 = V (bi-statyczna prędkość) oraz r2 = A (bistatyczne przyspieszenie). Zakładając, że równanie(2.3) można przybliżyć wielomianem pierwszego stopnia, otrzymuje się:
r(t) ≈ R + V t, (2.8)
natomiast wykorzystując wielomian drugiego stopnia, chwilową odległość bistatycznąmożna wyrazić jako:
r(t) ≈ R + V t+At2
2. (2.9)
2.3 Równanie zasięgu
Podobnie jak w radarze monostatycznym, tak w radarze bistatycznym jedną z pod-stawowych zależności jest równanie zasięgu. Moc sygnału odbitego od obiektu możnaokreślić za pomocą zależności [99], [30]:
Pr =PtGtσbGrλ
2
(4π)3r21r22
L, (2.10)
gdzie Pt jest mocą nadajnika, Gt jest zyskiem kierunkowym anteny nadawczej, σb jestbistatyczną powierzchnią skuteczną obiektu, Gr jest zyskiem kierunkowym anteny od-biorczej, λ jest długością fali, L jest współczynnikiem tłumienia, r1 jest odległościąod nadajnika do obiektu oraz r2 jest odległością od obiektu do odbiornika (w tymprzypadku pominięto zależności odległości od czasu).
Stosunek mocy sygnału do mocy szumu odbiornika można wyrazić jako:
SNRin =PrPn
=PtGtσbGrλ
2
(4π)3r21r22
1
kBT0BrL, (2.11)
25

Zasada pracy radaru pasywnego
gdzie Pn jest mocą szumu, kB jest stałą Boltzmanna, T0 jest temperaturą szumową, zaśBr jest szerokością pasma odbiornika.
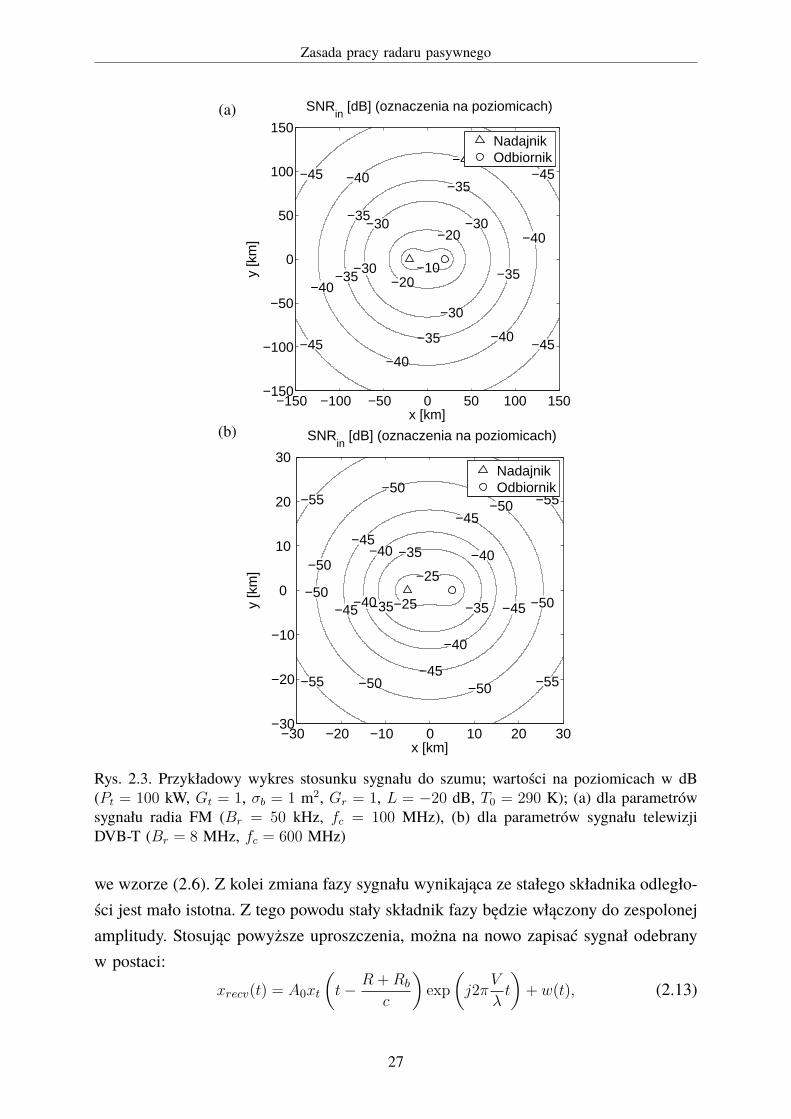
Przykładowe wykresy stosunku sygnału do szumu wyznaczone za pomocą równa-nia (2.11) dla parametrów typowych dla nadajnika FM i DVB-T przedstawiono na rys.2.3. Miejsca geometryczne stałego stosunku sygnału do szumu tworzą tzw. owale Cas-siniego [99]. Otrzymane wartości SNRin są znacznie poniżej 0 dB i detekcja sygnałuw tej postaci nie jest możliwa. W praktyce stosuje się koherentną integrację sygnału(realizowaną za pomocą korelacji), przez co stosunek sygnału do szumu zwiększa sięo iloczyn BT , gdzie B jest szerokością pasma sygnału a T czasem integracji. Zwykleiloczyn BT osiąga wartość kilkudziesięciu decybeli, dzięki czemu stosunek sygnałudo szumu po przetwarzaniu osiąga wartości umożliwiające detekcję.
2.4 Model sygnału odebranego
Przyjęto, że nadawany sygnał xt(t) ma ograniczone pasmo oraz że szerokość B tegopasma jest dużo mniejsza od częstotliwości nośnej. Upoważnia to do opisu sygnału mo-delem wąskopasmowym, co w znaczący sposób ułatwia analizę teoretyczną. Założenietakie jest słuszne dla większości typów sygnałów wykorzystywanych w radarach pa-sywnych. Przy założeniu pojedynczego obiektu odebrany przez radar i zdemodulowanysygnał xrecv(t) można modelować jako:
xrecv(t) = C0xt
[t− r(t) +Rb
c
]exp
{j
2π
λ[r(t) +Rb]
}+ w(t), (2.12)
gdzie xt(t) jest sygnałem nadawanym (w reprezentacji zespolonej – po sprowadzeniu dopasma podstawowego), C0 jest zespoloną amplitudą, której moduł jest proporcjonalnydo mocy sygnału |C0| ∼
√Pr, c jest prędkością światła, a w(t) jest białym szumem
gaussowskim.Zazwyczaj na tym etapie przyjmuje się, że zależność drogi r(t) od czasu może
być przybliżona za pomocą wielomianu pierwszego stopnia, tzn. jest uwzględnionatylko odległość i prędkość bistatyczna. Ze wzoru (2.12) widać, że zmienna w czasiedroga wpływa zarówno na zmianę fazy sygnału nadanego, jak i na zmianę skali czasutego sygnału. O ile faza sygnału jest bardzo istotna, ponieważ umożliwia wyznaczenieprędkości obiektu, zmiana skali czasu przy stosowanych typowo czasach integracji jestpraktycznie niezauważalna [72]. Dlatego też wpływ odległości na obwiednię sygnałunadawanego xt(t) będzie uproszczony poprzez uwzględnienie tylko stałego składnika
26
Zasada pracy radaru pasywnego
(a)
−150 −100 −50 0 50 100 150−150
−100
−50
0
50
100
150
−45
−45
−45
−45
−40−40
−40
−40
−40
−40
−35
−35
−35
−35
−35
−30 −30
−30
−30
−20
−20−10
x [km]
y [k
m]
SNRin
[dB] (oznaczenia na poziomicach)
NadajnikOdbiornik
(b)
−30 −20 −10 0 10 20 30 −30
−20
−10
0
10
20
30
−55
−55
−55
−55
−50
−50−50
−50
−50−50
−50
−45
−45
−45
−45
−45
−40 −40
−40
−40
−35
−35−35
−25
−25
x [km]
y [k
m]
SNRin
[dB] (oznaczenia na poziomicach)
NadajnikOdbiornik
Rys. 2.3. Przykładowy wykres stosunku sygnału do szumu; wartości na poziomicach w dB(Pt = 100 kW, Gt = 1, σb = 1 m2, Gr = 1, L = −20 dB, T0 = 290 K); (a) dla parametrówsygnału radia FM (Br = 50 kHz, fc = 100 MHz), (b) dla parametrów sygnału telewizjiDVB-T (Br = 8 MHz, fc = 600 MHz)
we wzorze (2.6). Z kolei zmiana fazy sygnału wynikająca ze stałego składnika odległo-ści jest mało istotna. Z tego powodu stały składnik fazy będzie włączony do zespolonejamplitudy. Stosując powyższe uproszczenia, można na nowo zapisać sygnał odebranyw postaci:
xrecv(t) = A0xt
(t− R +Rb
c
)exp
(j2π
V
λt
)+ w(t), (2.13)
27
Zasada pracy radaru pasywnego
gdzie A0 = C0 exp[j 2πλ (R +Rb)
].
2.5 Funkcja nieoznaczoności
Funkcja nieoznaczoności (lub niejednoznaczności) jest klasycznym narzędziem sto-sowanym przy ocenie sygnałów pod względem przydatności w technice radarowej[100], [93], [89]. Definicja funkcji nieoznaczoności używana w radiolokacji odbieganieco od tej stosowanej w teorii przetwarzania sygnałów i ma następującą postać:
χ(τ, f) =
∞w
−∞x(t)x∗(t− τ) exp (j2πft) dt, (2.14)
gdzie x(t) jest analizowanym sygnałem. Różnica pomiędzy wzorem (2.14) a klasycznąformułą funkcji nieoznaczoności polega na odmiennej definicji opóźnienia sygnału.Użyta tutaj postać jest jednak dużo bardziej naturalna w radiolokacji, gdzie opóźnieniuulega jedna z kopii sygnału, odpowiadająca sygnałowi odebranemu.
Funkcja (2.14) ma postać zbliżoną do funkcji korelacji z dodatkowo wprowadzo-nym przesunięciem częstotliwości. Analiza dwuwymiarowej funkcji nieoznaczonościpozwala na określenie osiągalnej rozdzielczości, poziomu listków bocznych oraz okre-sowości występujących w sygnale. Po przeskalowaniu opóźnienia na odległość bista-tyczną R, a częstotliwości na prędkość bistatyczną V otrzymuje się:
χ(R, V ) =
∞w
−∞x(t)x∗
(t− R
c
)exp
(j2π
V
λt
)dt. (2.15)
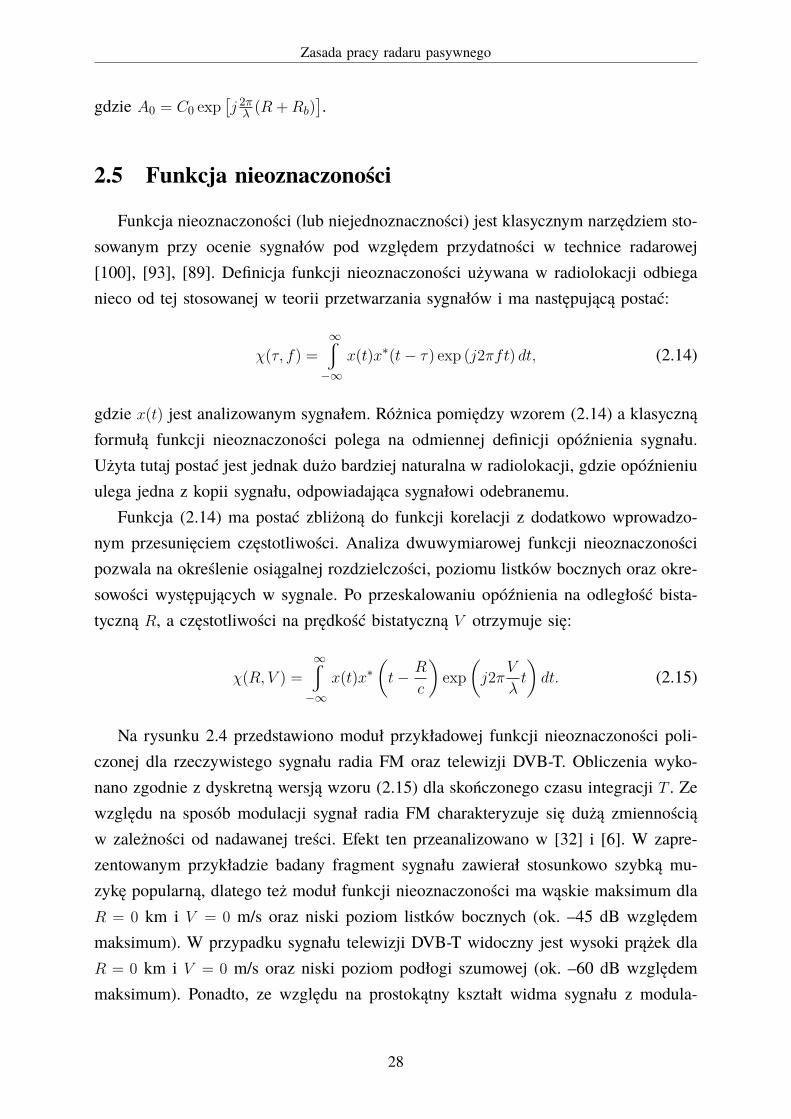
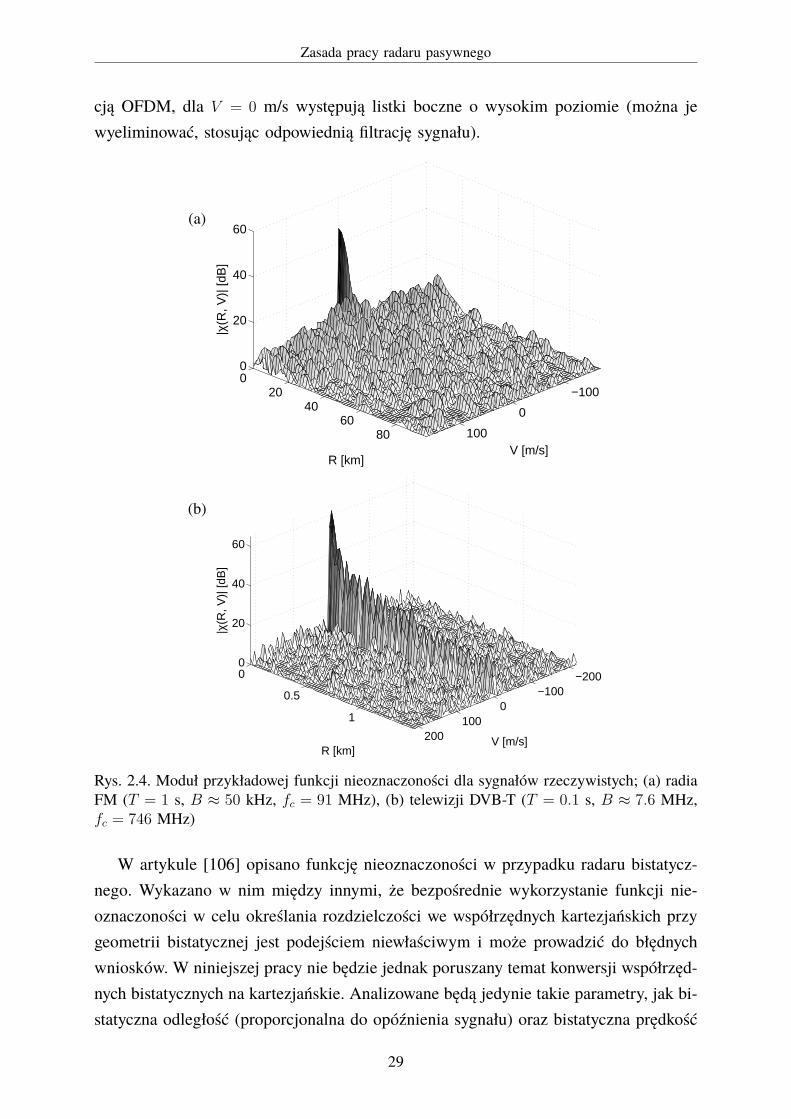
Na rysunku 2.4 przedstawiono moduł przykładowej funkcji nieoznaczoności poli-czonej dla rzeczywistego sygnału radia FM oraz telewizji DVB-T. Obliczenia wyko-nano zgodnie z dyskretną wersją wzoru (2.15) dla skończonego czasu integracji T . Zewzględu na sposób modulacji sygnał radia FM charakteryzuje się dużą zmiennościąw zależności od nadawanej treści. Efekt ten przeanalizowano w [32] i [6]. W zapre-zentowanym przykładzie badany fragment sygnału zawierał stosunkowo szybką mu-zykę popularną, dlatego też moduł funkcji nieoznaczoności ma wąskie maksimum dlaR = 0 km i V = 0 m/s oraz niski poziom listków bocznych (ok. –45 dB względemmaksimum). W przypadku sygnału telewizji DVB-T widoczny jest wysoki prążek dlaR = 0 km i V = 0 m/s oraz niski poziom podłogi szumowej (ok. –60 dB względemmaksimum). Ponadto, ze względu na prostokątny kształt widma sygnału z modula-
28
Zasada pracy radaru pasywnego
cją OFDM, dla V = 0 m/s występują listki boczne o wysokim poziomie (można jewyeliminować, stosując odpowiednią filtrację sygnału).
(a)
−100
0
100
020
4060
80
0
20
40
60
V [m/s]R [km]
|χ(R
, V)|
[dB
]
(b)
−200−100
0100
200
0
0.5
1
0
20
40
60
V [m/s]R [km]
|χ(R
, V)|
[dB
]
Rys. 2.4. Moduł przykładowej funkcji nieoznaczoności dla sygnałów rzeczywistych; (a) radiaFM (T = 1 s, B ≈ 50 kHz, fc = 91 MHz), (b) telewizji DVB-T (T = 0.1 s, B ≈ 7.6 MHz,fc = 746 MHz)
W artykule [106] opisano funkcję nieoznaczoności w przypadku radaru bistatycz-nego. Wykazano w nim między innymi, że bezpośrednie wykorzystanie funkcji nie-oznaczoności w celu określania rozdzielczości we współrzędnych kartezjańskich przygeometrii bistatycznej jest podejściem niewłaściwym i może prowadzić do błędnychwniosków. W niniejszej pracy nie będzie jednak poruszany temat konwersji współrzęd-nych bistatycznych na kartezjańskie. Analizowane będą jedynie takie parametry, jak bi-statyczna odległość (proporcjonalna do opóźnienia sygnału) oraz bistatyczna prędkość
29
Zasada pracy radaru pasywnego
(proporcjonalna do częstotliwości Dopplera). Parametry te nie są zależne od geome-trii, a więc analiza abstrahująca od wzajemnego rozmieszczenia nadajnika, obiektuoraz odbiornika jest w pełni uzasadniona.
30
Rozdział 3
Etapy przetwarzania sygnału w radarze
pasywnym
Kolejne etapy przetwarzania sygnału w radarze aktywnym są powszechnie znane,a ich opis można znaleźć w licznych książkach [89], [99], [23]. Inaczej wygląda sy-tuacja w przypadku radarów pasywnych. Pomimo wielu cech wspólnych przetwarza-nie sygnału w radarach pasywnych różni się od klasycznego schematu przetwarzaniaw przypadku radarów aktywnych. Co więcej, ze względu na niski stopień zaawansowa-nia technologii radaru pasywnego brak jest jednego ustalonego schematu przetwarzania.Niniejszy rozdział spełnia dwojaką funkcję. Po pierwsze, przedstawia wszystkie etapyprocesu przetwarzania sygnałów w radarze pasywnym, gdyż nie są one powszechnieznane. Po drugie zaś, jest próbą usystematyzowania metod przetwarzania sygnałóww radarze pasywnym na podstawie wiedzy i doświadczenia autora oraz doniesień lite-raturowych.
Proces przetwarzania sygnału w radarze pasywnym można podzielić na następująceetapy:
• Odbiór sygnału;
• Formowanie wiązki;
• Wstępne przetwarzanie sygnału;
• Filtracja adaptacyjna;
• Korelacja;
• Detekcja i estymacja parametrów;
31
Etapy przetwarzania sygnału w radarze pasywnym
• Śledzenie we współrzędnych bistatycznych;
• Lokalizacja oraz śledzenie we współrzędnych kartezjańskich.
Poniżej zamieszczono opis poszczególnych operacji.
3.1 Odbiór sygnału
Radar pasywny jest współcześnie konstruowany w dużej mierze w oparciu o kon-cepcję Software Defined Radio (SDR), tzn. część analogowa systemu jest ograniczonado minimum na rzecz przetwarzania cyfrowego realizowanego przez oprogramowanie.Oznacza to, że próbkowanie sygnału jest dokonywane we wczesnej fazie przetwarzaniasygnału. Podejście takie, w przeciwieństwie do klasycznego odbioru sygnału opar-tego na technice analogowej, zapewnia nieodzowne zalety, takie jak dokładność orazpowtarzalność wykonywanych operacji. Ponadto technika SDR jest w dużej mierzerealizowana za pomocą programowalnych układów FPGA (ang. Field ProgrammableGate Array) oraz procesorów sygnałowych, co daje możliwość rekonfiguracji systemupoprzez zmianę oprogramowania, bez konieczności ingerencji w część sprzętową. Ta-kie rozwiązanie wymusza jednak konieczność przetwarzania dużych strumieni danychw czasie rzeczywistym, co pociąga za sobą znaczące zapotrzebowanie na moc obli-czeniową oraz pamięć układów cyfrowych.
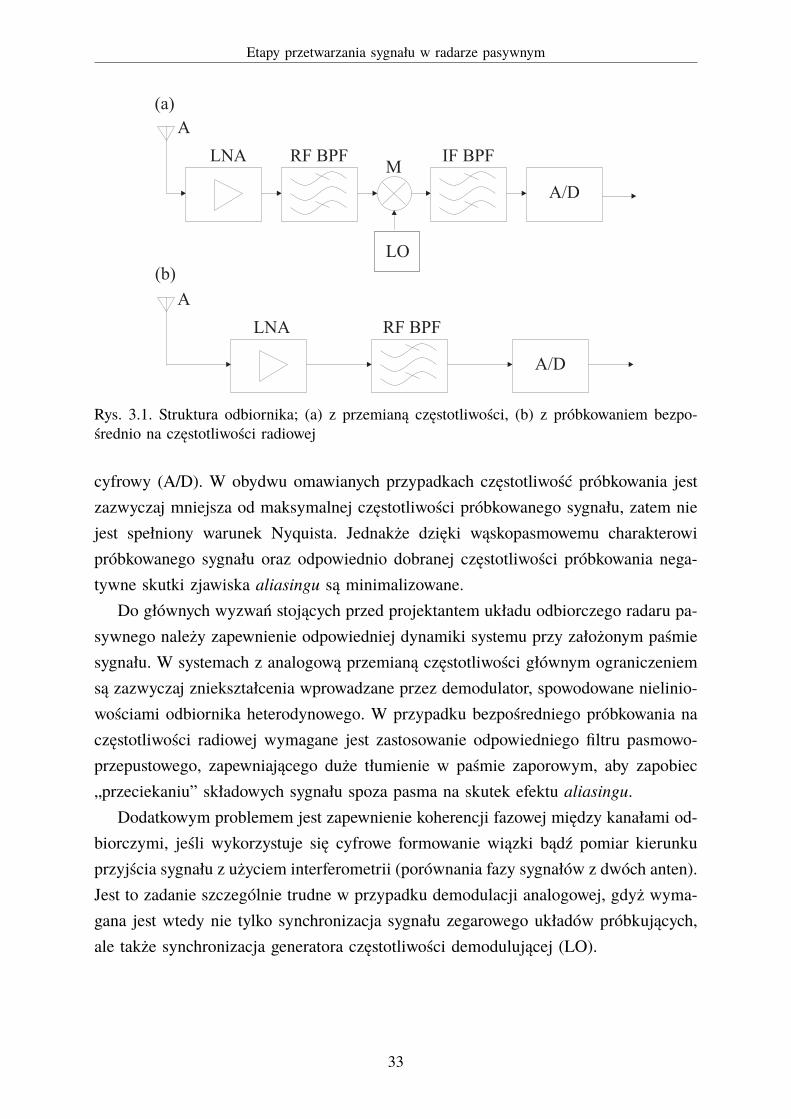
Zwykle sygnał z anteny jest wzmacniany i filtrowany, a następnie poddaje sięgo przemianie częstotliwości, po czym sygnał częstotliwości pośredniej jest próbko-wany [39], [104]. Kolejne operacje, takie jak detekcja kwadraturowa, filtracja czydemodulacja wykonuje się w sposób cyfrowy. Istnieją także zrealizowane praktyczniesystemy, gdzie nie występuje przemiana częstotliwości, a próbkowanie sygnału od-bywa się bezpośrednio na częstotliwości radiowej (po uprzedniej filtracji pasmowejsygnału) [50], [83], [77]. Na rysunku 3.1 przedstawiono przykładowe struktury odbior-nika pracującego w konfiguracji z przemianą częstotliwości oraz bez niej. Pierwszyukład
[3.1 (a)
]jest zbudowany z anteny (A – Antenna), wzmacniacza niskoszumnego
(LNA – Low-Noise Amplifier), filtru pasmowo-przepustowego częstotliwości radiowej(RF BPF – Radio-Frequency Band-Pass Filter), mieszacza (M – Mixer), generatoraczęstotliwości demodulującej (LO – Local Oscillator), filtru pasmowo-przepustowegoczęstotliwości pośredniej (IF BPF – Intermediate-Frequency Band-Pass Filter) orazprzetwornika analogowo-cyfrowego (A/D – Analog/Digital Converter). W skład dru-giego schematu
[3.1 (b)
]wchodzi antena (A), wzmacniacz niskoszumny (LNA), filtr
pasmowo-przepustowy częstotliwości radiowej (RF BPF) i przetwornik analogowo-
32
Etapy przetwarzania sygnału w radarze pasywnym
A/D
A/D
(a)
(b)
LO
LNA RF BPF IF BPF
LNA RF BPF
M
A
A
Rys. 3.1. Struktura odbiornika; (a) z przemianą częstotliwości, (b) z próbkowaniem bezpo-średnio na częstotliwości radiowej
cyfrowy (A/D). W obydwu omawianych przypadkach częstotliwość próbkowania jestzazwyczaj mniejsza od maksymalnej częstotliwości próbkowanego sygnału, zatem niejest spełniony warunek Nyquista. Jednakże dzięki wąskopasmowemu charakterowipróbkowanego sygnału oraz odpowiednio dobranej częstotliwości próbkowania nega-tywne skutki zjawiska aliasingu są minimalizowane.
Do głównych wyzwań stojących przed projektantem układu odbiorczego radaru pa-sywnego należy zapewnienie odpowiedniej dynamiki systemu przy założonym paśmiesygnału. W systemach z analogową przemianą częstotliwości głównym ograniczeniemsą zazwyczaj zniekształcenia wprowadzane przez demodulator, spowodowane nielinio-wościami odbiornika heterodynowego. W przypadku bezpośredniego próbkowania naczęstotliwości radiowej wymagane jest zastosowanie odpowiedniego filtru pasmowo-przepustowego, zapewniającego duże tłumienie w paśmie zaporowym, aby zapobiec„przeciekaniu” składowych sygnału spoza pasma na skutek efektu aliasingu.
Dodatkowym problemem jest zapewnienie koherencji fazowej między kanałami od-biorczymi, jeśli wykorzystuje się cyfrowe formowanie wiązki bądź pomiar kierunkuprzyjścia sygnału z użyciem interferometrii (porównania fazy sygnałów z dwóch anten).Jest to zadanie szczególnie trudne w przypadku demodulacji analogowej, gdyż wyma-gana jest wtedy nie tylko synchronizacja sygnału zegarowego układów próbkujących,ale także synchronizacja generatora częstotliwości demodulującej (LO).
33
Etapy przetwarzania sygnału w radarze pasywnym
3.2 Formowanie wiązki
Radar pasywny posiada co najmniej dwa kanały: jeden referencyjny oraz jeden lubwięcej pomiarowych. Kanały te powstają przez skierowanie wiązki antenowej odpo-wiednio w kierunku nadajnika oraz na obszar, na którym wykrywane są obiekty.
Jednym ze sposobów uzyskania dwóch kanałów jest zastosowanie anten kierunko-wych [39], [51]. Takie podejście jest jednak mało efektywne w przypadku wykorzy-stywania wielu nadajników równocześnie. Oznaczałoby to bowiem, że używane jest tosamo ustawienie anten dla różnych nadajników, co nie byłoby rozwiązaniem optymal-nym. Można by również stosować wiele anten, przełączając źródło sygnału w zależnościod wykorzystywanego w danym momencie nadajnika. To z kolei komplikowałoby całysystem.
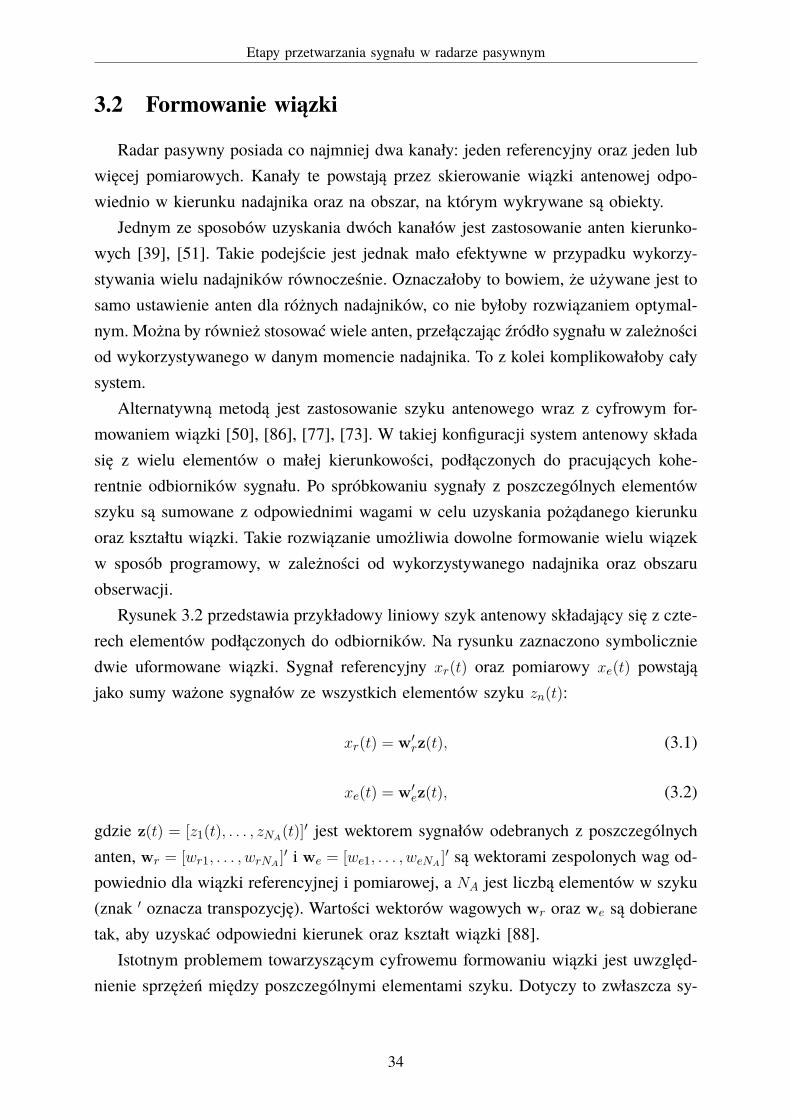
Alternatywną metodą jest zastosowanie szyku antenowego wraz z cyfrowym for-mowaniem wiązki [50], [86], [77], [73]. W takiej konfiguracji system antenowy składasię z wielu elementów o małej kierunkowości, podłączonych do pracujących kohe-rentnie odbiorników sygnału. Po spróbkowaniu sygnały z poszczególnych elementówszyku są sumowane z odpowiednimi wagami w celu uzyskania pożądanego kierunkuoraz kształtu wiązki. Takie rozwiązanie umożliwia dowolne formowanie wielu wiązekw sposób programowy, w zależności od wykorzystywanego nadajnika oraz obszaruobserwacji.
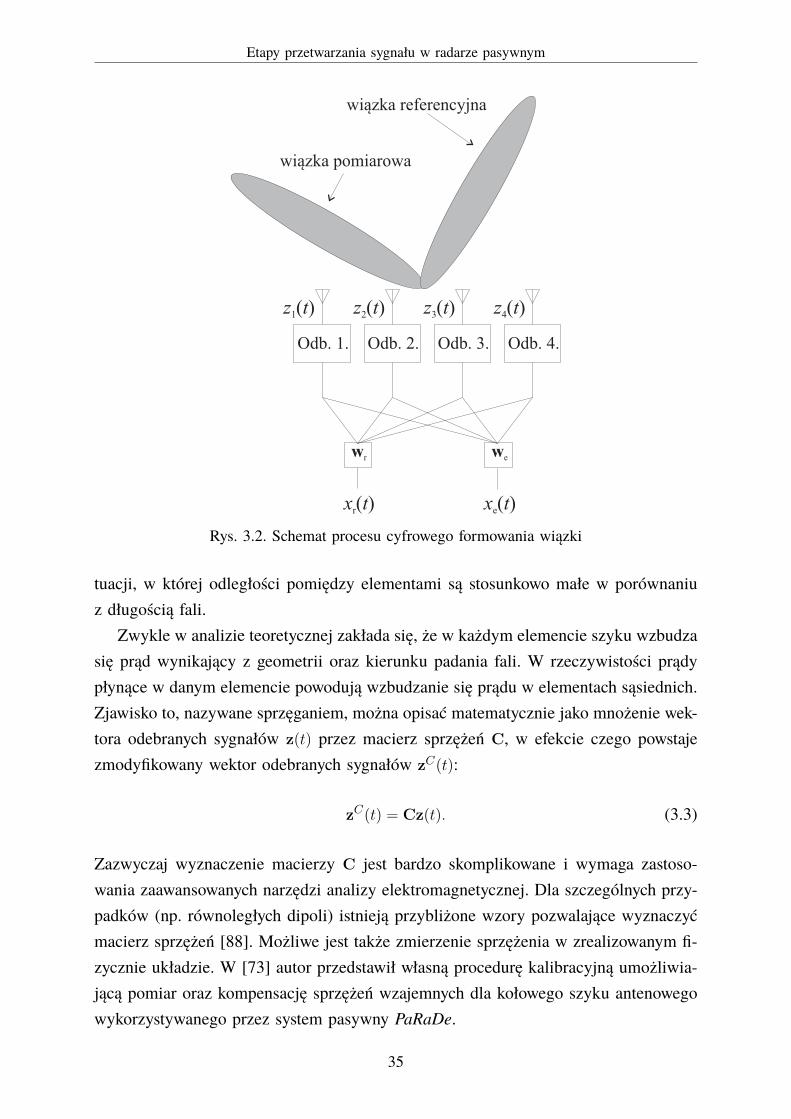
Rysunek 3.2 przedstawia przykładowy liniowy szyk antenowy składający się z czte-rech elementów podłączonych do odbiorników. Na rysunku zaznaczono symboliczniedwie uformowane wiązki. Sygnał referencyjny xr(t) oraz pomiarowy xe(t) powstająjako sumy ważone sygnałów ze wszystkich elementów szyku zn(t):
xr(t) = w′rz(t), (3.1)
xe(t) = w′ez(t), (3.2)
gdzie z(t) = [z1(t), . . . , zNA(t)]′ jest wektorem sygnałów odebranych z poszczególnychanten, wr = [wr1, . . . , wrNA ]′ i we = [we1, . . . , weNA ]′ są wektorami zespolonych wag od-powiednio dla wiązki referencyjnej i pomiarowej, a NA jest liczbą elementów w szyku(znak ′ oznacza transpozycję). Wartości wektorów wagowych wr oraz we są dobieranetak, aby uzyskać odpowiedni kierunek oraz kształt wiązki [88].
Istotnym problemem towarzyszącym cyfrowemu formowaniu wiązki jest uwzględ-nienie sprzężeń między poszczególnymi elementami szyku. Dotyczy to zwłaszcza sy-
34
Etapy przetwarzania sygnału w radarze pasywnym
z t1( )
Odb. 1.
z t2( )
Odb. 2.
z t3( )
Odb. 3.
z t4( )
Odb. 4.
wr we
x tr( ) x te( )
wi¹zka referencyjna
wi¹zka pomiarowa
Rys. 3.2. Schemat procesu cyfrowego formowania wiązki
tuacji, w której odległości pomiędzy elementami są stosunkowo małe w porównaniuz długością fali.
Zwykle w analizie teoretycznej zakłada się, że w każdym elemencie szyku wzbudzasię prąd wynikający z geometrii oraz kierunku padania fali. W rzeczywistości prądypłynące w danym elemencie powodują wzbudzanie się prądu w elementach sąsiednich.Zjawisko to, nazywane sprzęganiem, można opisać matematycznie jako mnożenie wek-tora odebranych sygnałów z(t) przez macierz sprzężeń C, w efekcie czego powstajezmodyfikowany wektor odebranych sygnałów zC(t):
zC(t) = Cz(t). (3.3)
Zazwyczaj wyznaczenie macierzy C jest bardzo skomplikowane i wymaga zastoso-wania zaawansowanych narzędzi analizy elektromagnetycznej. Dla szczególnych przy-padków (np. równoległych dipoli) istnieją przybliżone wzory pozwalające wyznaczyćmacierz sprzężeń [88]. Możliwe jest także zmierzenie sprzężenia w zrealizowanym fi-zycznie układzie. W [73] autor przedstawił własną procedurę kalibracyjną umożliwia-jącą pomiar oraz kompensację sprzężeń wzajemnych dla kołowego szyku antenowegowykorzystywanego przez system pasywny PaRaDe.
35
Etapy przetwarzania sygnału w radarze pasywnym
Zastosowanie szyku antenowego daje również możliwość wykorzystania adaptacyj-nego formowania wiązki, co jest potencjalnie bardzo korzystne przy tłumieniu silnegosygnału bezpośredniego w kanale pomiarowym [22]. Prowadzi to jednak do znaczą-cego wzrostu nakładu obliczeniowego, a mimo to nie eliminuje problemu ze względuna występujące w kanale pomiarowym silne echa pochodzące od obiektów stałychz kierunków innych niż kierunek nadajnika. Kwestię powyższą można efektywnie roz-wiązać za pomocą filtru adaptacyjnego stosowanego na dalszym etapie przetwarzania,dlatego też adaptacyjne formowanie wiązek jest metodą rzadko stosowaną.
Zamiast tradycyjnego szyku antenowego stosuje się również szyk z dużą sepa-racją pomiędzy elementami, co rozważać można jako formę techniki MIMO (ang.Multiple-Input and Multiple-Output), znanej z telekomunikacji. W klasycznym szykuantenowym poszczególne elementy promieniujące nie powinny być od siebie zbytniooddalone, aby uniknąć powstawania listków bocznych o wysokim poziomie [88]. Faktten ogranicza rozmiar szyku przy ustalonej liczbie elementów. W praktyce prowadzi todo wytworzenia szerokich wiązek odbiorczych. W wyniku procesu usuwania sygnałureferencyjnego z sygnału pomiarowego następuje redukcja efektywnego pokrycia ra-daru – im szersza jest wiązka referencyjna, tym większa będzie redukcja. Przy zasto-sowaniu dużej separacji pomiędzy elementami szyku możliwej jest otrzymanie wąskiejwiązki referencyjnej co, pomimo powstawania wysokich listków bocznych, powodujezwiększenie efektywnego pokrycia radaru. Koncepcja ta została opisana przez autoraw [48] i [69].
3.3 Wstępne przetwarzanie sygnału
Sygnały wykorzystywane przez radar pasywny nie są projektowane z myślą o de-tekcji obiektów, lecz o efektywnym przekazywaniu informacji. Z tego powodu wła-ściwości tych sygnałów nie są optymalne z punktu widzenia radiolokacji. Dotyczy togłównie charakteru funkcji nieoznaczoności, a w szczególności wszelkich okresowości,poziomu listków bocznych oraz szerokości listka głównego. Idealny sygnał powiniencharakteryzować się wąskim maksimum i brakiem okresowości w funkcji nieoznaczo-ności, a także niskim poziomem listków bocznych. Wymagania takie spełnia sygnałszumowy. Z uwagi na fakt, że spotykane w praktyce sygnały często nie spełniają tychkryteriów, stosuje się niekiedy metody mające na celu „poprawę” sygnału.
W [27] przedstawiono metodę „wybielania” sygnału podczas procesu korelacji,czego wynikiem jest uzyskanie niemal idealnej odpowiedzi od punktowego obiektu
36
Etapy przetwarzania sygnału w radarze pasywnym
nawet dla sygnałów o strukturze bardzo niekorzystnej z punktu widzenia detekcji (np.sygnałów telewizji analogowej). Konsekwencją są jednak znaczne straty detekcji sięga-jące nawet kilkudziesięciu decybeli. Z kolei w [97] zaprezentowano metodę modyfikacjisygnału telewizji cyfrowej DVB-T w celu usunięcia niepożądanych maksimów z funkcjinieoznaczoności wywołanych podnośnymi pilotowymi oraz prefiksem cyklicznym.
Sygnał radia FM w zasadzie nie wymaga dodatkowego przetwarzania ze względu nawłaściwości podobne do szumu pasmowego. Problem stanowi tu jedynie wspomnianawcześniej zależność pasma sygnału od nadawanej aktualnie treści programu. Prowa-dzi to do zmian funkcji nieoznaczoności sygnału, a w szczególności do pogorszeniarozróżnialności [6].
3.4 Filtracja adaptacyjna
Pomimo procesu formowania wiązki, którego jednym z celów jest separacja sy-gnału referencyjnego i sygnału użytecznego, sygnał pomiarowy często zawiera skła-dową bezpośrednią. Jest ona zazwyczaj dużo silniejsza od słabych ech obiektów ru-chomych. Ponadto sygnał pomiarowy może zawierać również silne echa od obiektówstałych, które nie są interesujące z punku widzenia użytkownika (z założenia radar po-winien wykrywać obiekty ruchome). Wymienione tu składowe sygnału mogą utrudnićlub wręcz uniemożliwić wykrywanie obiektów ruchomych, ponieważ poziom korela-cyjnych listków bocznych pochodzących od tych składowych może być wyższy niżmaksima modułu funkcji korelacji odpowiadające obiektom. Z tego powodu koniecznejest posłużenie się metodą usuwającą niepożądane składniki z sygnału pomiarowego.Jedną z możliwości jest zastosowanie analogowych metod tłumienia [98], [87], aczkol-wiek nie są one uniwersalne, a ponadto nie rozwiązują problemu do końca, usuwanajest bowiem tylko składowa bezpośrednia, a nie silne echa od obiektów stałych. Obec-nie najchętniej wykorzystuje się algorytmy działające w dziedzinie dyskretnej, tj. nasygnale spróbkowanym. Przykładem może tu być np. metoda sekwencyjna, w któ-rej usuwa się poszczególne silne echa pochodzące od obiektów stałych [19]. Jednakmetoda ta jest bardziej skuteczna w przypadku usuwania silnych ech pojedynczychobiektów ruchomych, jak pokazano to w [46]. Bardziej uniwersalną metodą jest filtra-cja adaptacyjna [107], [64].
Zadaniem filtru adaptacyjnego jest usunięcie składowej bezpośredniej oraz echobiektów stałych z sygnału pomiarowego. Korzystając ze wzoru (2.13), można zapisać
37

Etapy przetwarzania sygnału w radarze pasywnym
bardziej ogólną postać sygnału odebranego:
xe (t) =A0xt
(t− Rb
c
)+K−1∑k=1
Akxt
(t− Rk +Rb
c
)+
+L−1∑l=0
Blxt
(t− Rl +Rb
c
)exp
(j2π
Vlλt
)+ we(t).
(3.4)
Pierwszy ze składników po prawej stronie znaku równości odpowiada składowej bez-pośredniej. Pierwsza suma reprezentuje echa pochodzące od obiektów stałych (nie wy-stępuje tutaj dopplerowskie przesunięcie częstotliwości). Druga z sum modeluje echapochodzące od obiektów ruchomych. Ostatni składnik to szum odbiorczy.
Można przyjąć, że sygnał bezpośredni stanowi odbicie od hipotetycznego obiektuznajdującego się na odległości R = 0 m i zapisać wzór (3.4) w postaci:
xe (t) =K−1∑k=0
Akxt
(t− Rk +Rb
c
)+
+L−1∑l=0
Blxt
(t− Rl +Rb
c
)exp
(j2π
Vlλt
)+ we(t),
(3.5)
gdzie R0 = 0 m. Występują tu zatem trzy składowe sygnału: echa obiektów stałych(bez przesunięcia Dopplera) – clutter, echa obiektów ruchomych (z przesunięciemDopplera) oraz szum:
xe(t) = xclutt(t) + xtarg(t) + we(t). (3.6)
Celem zastosowania filtru adaptacyjnego jest usunięcie składnika xclutt(t) z sygnałupomiarowego xe(t). Zakłada się przy tym, że sygnał xt(t) nie jest skorelowany z samymsobą po przesunięciu w dziedzinie częstotliwości. Dzięki temu eliminowane są tylkosygnały pochodzące od obiektów stałych.
Konfiguracja filtru adaptacyjnego używanego w tym zastosowaniu jest pokazana narys. 3.3. Jest to klasyczna struktura do usuwania zakłóceń (ang. interference canceller)[34]. Jako sygnał wejściowy filtru służy spróbkowana wersja sygnału z kanału refe-rencyjnego xr(n), gdzie n jest czasem dyskretnym unormowanym względem okresupróbkowania. Zwykle przyjmuje się, że sygnał xr(n) jest opóźnioną wersją sygnałunadawanego xt(n), natomiast moc szumu w kanale referencyjnym wr(n) jest pomijal-nie mała w stosunku do mocy sygnału xr(n). Na wyjściu filtru otrzymuje się estymatęskładowej clutteru xclutt(n), która jest odejmowana od sygnału pomiarowego xe(n).
38
Etapy przetwarzania sygnału w radarze pasywnym
filtr adaptacyjny
+-
x nr( )
x ne( )
( )nxcluttˆ x nef( )
x nt( )+ +
+
x ntarg( ) w ne( )
w nr( )
h
model kana³u
h n( )
Dn ( )n
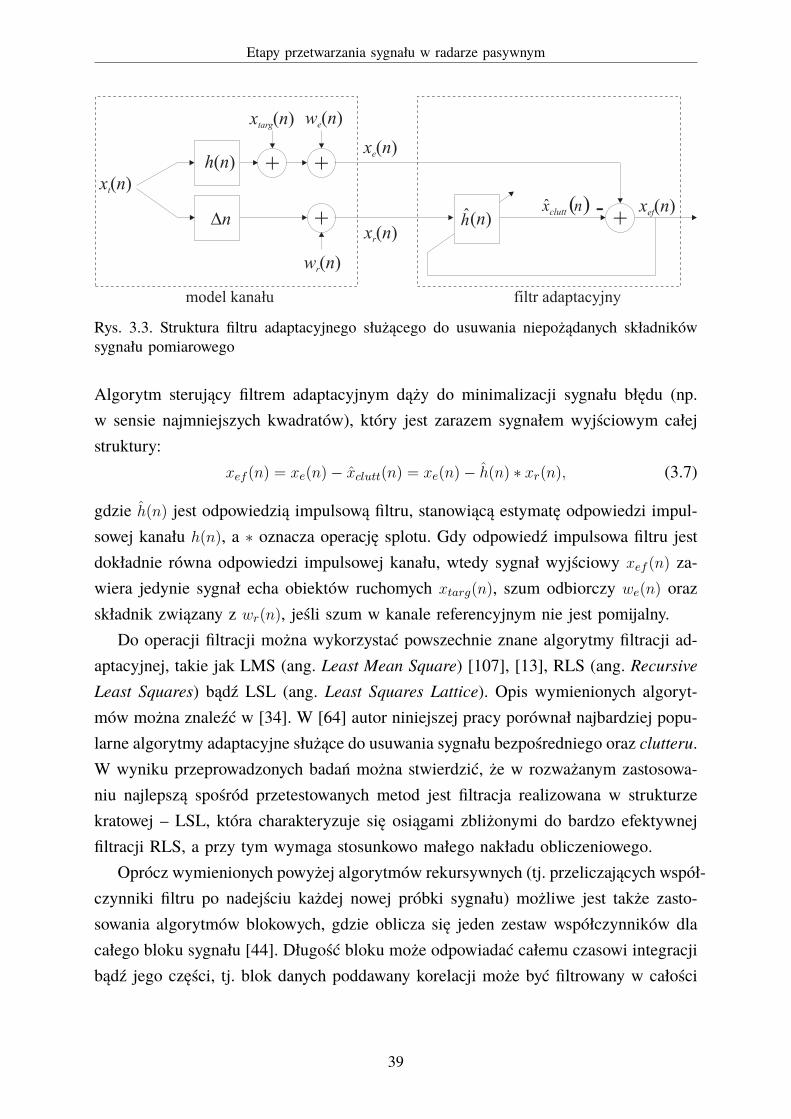
Rys. 3.3. Struktura filtru adaptacyjnego służącego do usuwania niepożądanych składnikówsygnału pomiarowego
Algorytm sterujący filtrem adaptacyjnym dąży do minimalizacji sygnału błędu (np.w sensie najmniejszych kwadratów), który jest zarazem sygnałem wyjściowym całejstruktury:
xef (n) = xe(n)− xclutt(n) = xe(n)− h(n) ∗ xr(n), (3.7)
gdzie h(n) jest odpowiedzią impulsową filtru, stanowiącą estymatę odpowiedzi impul-sowej kanału h(n), a ∗ oznacza operację splotu. Gdy odpowiedź impulsowa filtru jestdokładnie równa odpowiedzi impulsowej kanału, wtedy sygnał wyjściowy xef (n) za-wiera jedynie sygnał echa obiektów ruchomych xtarg(n), szum odbiorczy we(n) orazskładnik związany z wr(n), jeśli szum w kanale referencyjnym nie jest pomijalny.
Do operacji filtracji można wykorzystać powszechnie znane algorytmy filtracji ad-aptacyjnej, takie jak LMS (ang. Least Mean Square) [107], [13], RLS (ang. RecursiveLeast Squares) bądź LSL (ang. Least Squares Lattice). Opis wymienionych algoryt-mów można znaleźć w [34]. W [64] autor niniejszej pracy porównał najbardziej popu-larne algorytmy adaptacyjne służące do usuwania sygnału bezpośredniego oraz clutteru.W wyniku przeprowadzonych badań można stwierdzić, że w rozważanym zastosowa-niu najlepszą spośród przetestowanych metod jest filtracja realizowana w strukturzekratowej – LSL, która charakteryzuje się osiągami zbliżonymi do bardzo efektywnejfiltracji RLS, a przy tym wymaga stosunkowo małego nakładu obliczeniowego.
Oprócz wymienionych powyżej algorytmów rekursywnych (tj. przeliczających współ-czynniki filtru po nadejściu każdej nowej próbki sygnału) możliwe jest także zasto-sowania algorytmów blokowych, gdzie oblicza się jeden zestaw współczynników dlacałego bloku sygnału [44]. Długość bloku może odpowiadać całemu czasowi integracjibądź jego części, tj. blok danych poddawany korelacji może być filtrowany w całości
39
Etapy przetwarzania sygnału w radarze pasywnym
lub może być podzielony na mniejsze bloki. Stosując krótsze bloki, można uzyskaćszybszą adaptację filtru do zmieniających się w czasie warunków.
Jednym z istotnych problemów związanych z filtracją adaptacyjną, który nie zostałjeszcze definitywnie rozwiązany, jest usuwanie clutteru o poszerzonym widmie dopple-rowskim. W wielu sytuacjach, zwłaszcza przy długich czasach integracji, echo sygnałuodbitego od obiektów stacjonarnych wykazuje właściwości echa obiektów wolno poru-szających się. Może to wynikać np. ze zmian właściwości kanału radiowego lub z nie-znacznego ruchu elementów obiektów stacjonarnych, takich jak gałęzie drzew. Sytuacjataka prowadzi do „rozlewania” się energii sygnału poza komórkę odpowiadającą ze-rowej częstotliwości Dopplera. Zastosowanie w takim przypadku filtru adaptacyjnego,który usuwa wyłącznie echo obiektów stacjonarnych, nie przyniesie spodziewanegoefektu, gdyż pozostałości clutteru w komórkach o niezerowych przesunięciach Dop-plera mogą prowadzić do maskowania słabych ech obiektów ruchomych.
Przedstawiony problem można częściowo rozwiązać, posługując się rekursywnymialgorytmami opisanymi przez autora w [64]. W pracy tej pokazano, że oprócz usu-wania sygnału o zerowym przesunięciu Dopplera, rekursywny filtr adaptacyjny tłumirównież echo wolno poruszających się obiektów. Szerokość oraz głębokość powstałego„ostrza” w charakterystyce częstotliwościowej filtru może być zmieniana za pomocąwspółczynnika zapominania filtru adaptacyjnego. Nie daje to jednak pełnej kontrolinad zakresem przesunięć Dopplera, dla którego następuje silne tłumienie sygnału.
Innym podejściem znanym z literatury, np. z [45], jest suboptymalna metoda opartana blokowym filtrze kratowym. Z powodu braku ortogonalności zmodulowanych sy-gnałów błędu wstecznej predykcji wykorzystywanych w tej metodzie, wymagane jestkilkukrotne powtórzenie filtracji w celu otrzymania zadowalających rezultatów.
3.5 Korelacja
Kolejnym etapem przetwarzania sygnału w radarze pasywnym jest obliczenie funk-cji nieoznaczoności wzajemnej sygnału referencyjnego i sygnału pomiarowego. Jestto równoważne obliczeniu korelacji opóźnionego i przesuniętego w dziedzinie czę-stotliwości sygnału referencyjnego z sygnałem pomiarowym dla określonego zakresuopóźnień oraz przesunięć częstotliwości. Funkcję nieoznaczoności wzajemnej dla sy-gnałów ciągłych x(t) i y(t) można zdefiniować jako następującą funkcję korelacji:
ψ(R, V ) =
∞w
−∞y(t)x∗
(t− R
c
)exp
(−j2πV
λt
)dt. (3.8)
40
Etapy przetwarzania sygnału w radarze pasywnym
Warto tutaj zwrócić uwagę na podobieństwo powyższej definicji do funkcji nieozna-czoności własnej (2.15).
W praktyce funkcja korelacji (3.8) jest obliczana dla sygnałów dyskretnych w skoń-czonym przedziale integracji. Po uwzględnieniu dyskretnego charakteru przetwarzaniaoraz podstawieniu odpowiednich sygnałów otrzymuje się:
ψ(R, V ) =
Ns/2−1∑n=−Ns/2
xef (n)x∗r
(n− Rfs
c
)exp
(−j2π V
λfsn
), (3.9)
gdzie Ns jest liczbą (parzystą) przetwarzanych próbek sygnału, zaś fs jest częstotli-wością próbkowania. W przypadku pokrywania się wielkości (R, V ) z odpowiednimiparametrami któregoś z obiektów ruchomych, w module funkcji (3.9) występuje mak-simum, co umożliwia detekcję obiektów i jednocześnie zgrubną estymację ich para-metrów.
Zwykle liczba przetwarzanych próbek Ns sięga kilkuset tysięcy, co stwarza nie-trywialny problem przy obliczaniu korelacji (3.9). Można jednak zauważyć, iż zakreszmian odległości R i prędkości V , interesujący z punktu widzenia detekcji obiektów,jest stosunkowo mały. Zwykle maksymalne opóźnienie sygnału referencyjnego, okre-ślające zasięg instrumentalny radaru, wynosi kilkaset próbek. Z kolei częstotliwośćDopplera obiektów w typowych dla systemów pasywnych pasmach sięga kilkuset her-ców. Korzystając z tych faktów, możliwe jest opracowanie efektywnych oraz szybkichmetod obliczania funkcji (3.9). Przykładowo w [39] opisano algorytm, w którym dlakażdego opóźnienia liczony jest iloczyn sygnału referencyjnego i pomiarowego, a wy-nik jest poddawany filtracji dolnopasmowej oraz decymacji. Następnie obliczana jestszybka transformata Fouriera (ang. Fast Fourier Transform – FFT) otrzymanego sy-gnału. Prowadzi to do znaczących oszczędności w zapotrzebowaniu na moc oblicze-niową w porównaniu z obliczeniami przeprowadzonymi wprost z definicji (3.9).
3.6 Detekcja i estymacja parametrów
Detekcja obiektów w radarze pasywnym opiera się na klasycznym kryterium Ney-mana-Pearsona, w którym maksymalizuje się prawdopodobieństwo detekcji przy za-łożonym prawdopodobieństwie fałszywego alarmu [93], [37]. W praktyce sprowadzasię to do porównania wartości modułu funkcji nieoznaczoności (3.9) z obliczonymprogiem. Próg jest wyznaczany na podstawie znajomości rozkładu prawdopodobień-stwa wartości funkcji nieoznaczoności przy hipotezie zerowej, tzn. braku echa obiektu
41
Etapy przetwarzania sygnału w radarze pasywnym
w odebranym sygnale. W przypadku radarów pasywnych kształt tego rozkładu jestzazwyczaj bardzo dobrze znany: moduł funkcji nieoznaczoności dla szumu ma rozkładRayleigha, natomiast kwadrat modułu ma rozkład wykładniczy. W niniejszej pracywykorzystywany będzie kwadrat modułu funkcji niejednoznaczności. Do praktycznegowyznaczenia wartości progu detekcji konieczna jest znajomość jednego parametru roz-kładu wykładniczego, tj. wartości średniej.
W klasycznych impulsowych radarach aktywnych parametry rozkładu szumu zmie-niają się w czasie i przestrzeni. Z tego powodu stosuje się adaptacyjny algorytm detek-cji, w którym próg detekcji jest dostosowywany do charakteru szumu w sąsiedztwiebadanego obszaru. Algorytm taki jest nazywany CFAR (ang. Constant False AlarmRate), a jego najprostsza wersja to Cell Averaging CFAR – CA-CFAR [100], [93].Polega on na określaniu poziomu mocy szumu wokół testowanej komórki CUT (ang.Cell Under Test) na podstawie średniej arytmetycznej wartości z sąsiednich komó-rek. Często stosowanym zabiegiem jest wprowadzanie tzw. komórek ochronnych (ang.guard cell), przylegających bezpośrednio do testowanej komórki, które nie są branepod uwagę przy estymacji poziomu szumu. Dokonuje się tego w celu zapobieżeniazawyżania wyestymowanej wartości przez echo obiektu obejmujące kilka sąsiednichkomórek. Bardziej zaawansowane algorytmy CFAR opierają się na dogłębnej analiziewłaściwości statystycznych obserwowanego szumu.
Drugim problemem znanym z klasycznej teorii detekcji w radiolokacji aktywnej jestwybór odpowiedniego modelu rozkładu zakłóceń. Założenie o gaussowskim charakte-rze szumu, przyjmowane zazwyczaj z racji łatwości analizy teoretycznej, często nie jestspełnione w praktyce. Dotyczy to zwłaszcza zakłóceń pochodzących od powierzchnimorza, które charakteryzują się dużą impulsowością. Zastosowanie w takich przypad-kach nieadekwatnych metod detekcji prowadzi do zwiększenia prawdopodobieństwafałszywego alarmu lub znaczących strat detekcji.
Przedstawione powyżej dwa zagadnienia, tj. zmienność parametrów rozkładu orazokreślenie modelu rozkładu zakłóceń, nie są w radiolokacji pasywnej tak istotne, jakw przypadku radarów impulsowych, co zostanie pokrótce uzasadnione.
Funkcja nieoznaczoności (3.9) jest obliczana dla sygnału referencyjnego xr(n) orazsygnału pomiarowego pochodzącego z wyjścia filtru adaptacyjnego xef (n). Zakładająchipotezę zerową, tzn. że sygnał pomiarowy nie zawiera echa obiektu xtarg(n), sygnałwyjściowy filtru adaptacyjnego będzie zawierał tylko szum odbiorczy we(n). Ponieważszum ten nie jest skorelowany z sygnałem referencyjnym, funkcja nieoznaczonościbędzie się charakteryzowała losowymi fluktuacjami, niezależnymi od bistatycznej od-ległości R ani od bistatycznej prędkości V . Dzięki temu w większości sytuacji, można
42
Etapy przetwarzania sygnału w radarze pasywnym
zastosować uproszczoną metodę detekcji, w której używa się jednej wartości progudla całego zakresu zmian odległości i prędkości, co eliminuje konieczność adapta-cyjnego dostosowywania wartości progu. Oczywiście detekcja z użyciem algorytmuCFAR może być również stosowana w radarach pasywnych, dzięki czemu system jestbardziej odporny na nieprzewidziane zmiany parametrów rozkładu zakłóceń.
Drugi z wymienionych problemów, dotyczący rozkładów szumu odbiegających odrozkładu normalnego, jest w radarze pasywnym również mniej dotkliwy niż w kla-sycznych radarach impulsowych. Dzieje się tak dlatego, iż proces detekcji w radarzePCL jest przeprowadzany z wykorzystaniem funkcji nieoznaczoności obliczanej napodstawie setek tysięcy próbek sygnału. W praktyce obliczanie funkcji nieoznaczono-ści polega na sumowaniu odpowiednio przetworzonych próbek sygnału. Dlatego też,nawet w przypadku występowania impulsowego szumu w odebranym sygnale, ulega on„ugaussowieniu” na mocy centralnego twierdzenia granicznego. W rezultacie kwadratmodułu funkcji nieoznaczoności ma rozkład wykładniczy z bardzo dużą dokładnością,co zostanie pokazane w dalszej części pracy.
Pozycja echa przekraczającego próg detekcji na płaszczyźnie R − V wskazujezgrubne estymaty bistatycznej odległości oraz prędkości. Dokładność takiej estyma-cji jest ograniczona do rozmiaru komórki rozdzielczości. W celu uzyskania większejdokładności można zastosować metodę dopasowywania kształtu echa od pojedynczegoobiektu do zmierzonych wartości funkcji nieoznaczoności wzajemnej. W [85] przed-stawiono uproszczony algorytm oparty na dopasowywaniu paraboli (ang. parabolafitting), który został wykorzystany w niniejszej pracy.
Wynikiem działania procesu detekcji oraz estymacji są estymaty bistatycznej od-ległości R oraz bistatycznej prędkości V . Możliwe jest także estymowanie kolej-nych współczynników wielomianowej fazy sygnału, np. bistatycznego przyspieszenia.W [71] autor pracy zaproponował efektywną metodę estymacji bistatycznego przyspie-szenia opartą na filtracji obliczonej funkcji nieoznaczoności.
3.7 Śledzenie we współrzędnych bistatycznych
Kolejnym krokiem w przetwarzaniu jest śledzenie obiektów. Wprawdzie możliwejest bezpośrednie wykorzystanie wykryć pochodzących z układu detekcji i estymacji dośledzenia obiektu we współrzędnych kartezjańskich, jednak zastosowanie pośredniegoetapu śledzenia we współrzędnych bistatycznych przynosi lepsze rezultaty. Przy takimpodejściu wykrycia z układu detekcji są najpierw przetwarzane przez układ śledzenia
43
Etapy przetwarzania sygnału w radarze pasywnym
działający we współrzędnych bistatycznych. Następnie parametry trasy z tego układuśledzenia (bistatyczna odległość oraz prędkość) stanowią dane wejściowe dla układulokalizacji i śledzenia obiektów we współrzędnych kartezjańskich. Taki dwustopniowyproces śledzenia charakteryzuje się szeregiem zalet.
Lokalizacja obiektów w radarze pasywnym jest dosyć skomplikowana, głównie zewzględu na niejednoznaczności występujące w procesie kojarzenia poszczególnych po-miarów ze śledzonymi obiektami. Dodatkowe trudności są powodowane obecnością fał-szywych wykryć oraz prawdopodobieństwem detekcji obiektu mniejszym od jedności.Wprowadzenie dodatkowego etapu śledzenia we współrzędnych bistatycznych w istotnysposób upraszcza wymienione problemy. Jedną z podstawowych funkcji układu śledze-nia jest odróżnianie ech prawdziwych obiektów od fałszywych alarmów. Dzięki temuw procedurze lokalizacji z dużą dozą pewności operuje się na pomiarach odpowia-dających prawdziwym obiektom. Ponadto śledzenie obiektu pozwala na estymowaniepozycji w przypadku braku bezpośredniego pomiaru w danej chwili, tj. możliwe jest,dzięki predykcji, określenie parametrów obiektu między momentami pomiaru. Jestto szczególnie istotne przy wykorzystaniu wielu nadajników w sposób cykliczny, tzn.w sytuacjach gdy odbiornik jest przełączany między różnymi nadajnikami i pomiary sądokonywane w różnych momentach. Pozwala to również przewidzieć pozycję obiektu,nawet gdy nie został on wykryty w danej obserwacji. Dodatkowo śledzenie pozwala nazmniejszenie błędu pomiaru na skutek wykorzystania informacji z bieżącego pomiaruoraz historii stanu obiektu.
Dodanie pośredniego układu śledzenia ma również swoje wady. Najistotniejszą jestwprowadzenie opóźnienia do toru przetwarzania. Dzieje się tak dlatego, że układ śle-dzenia potrzebuje określonego czasu na uznanie trasy za wiarygodną. Z tego powodubardzo istotną kwestią staje się czas potrzebny do uznania trasy za odpowiadającąprawdziwemu obiektowi. Z tego względu analiza oraz optymalizacja czasu inicjali-zacji trasy są jednym z dwóch podstawowych problemów rozważanych w niniejszejpracy.
Proces śledzenia obiektów w radarze składa się z dwóch głównych elementów: es-tymacji stanu obiektu oraz przyporządkowywania pomiarów do tras (asocjacji danych).Estymacja stanu polega na obliczaniu wektora stanu obiektu x na podstawie wektorapomiarowego z. Ponieważ jednocześnie może być dostępnych wiele wektorów stanuxi oraz wektorów pomiarowych zj , do zadań układu śledzenia należy również decy-zja o przyporządkowaniu pomiaru j do obiektu i. Proces śledzenia zostanie dokładnieopisany w rozdziale czwartym.
44
Etapy przetwarzania sygnału w radarze pasywnym
3.8 Lokalizacja oraz śledzenie we współrzędnych kartezjań-
skich
W klasycznym radarze aktywnym pozycja jest określana na podstawie pomiaru od-ległości między radarem a obiektem oraz pomiaru kierunku obiektu odpowiadającegodanemu położeniu anteny. Ustalona odległość w radarze monostatycznym definiujeokrąg (w przypadku dwuwymiarowym) lub sferę (w przypadku trójwymiarowym), naktórej znajduje się obiekt. Położenie anteny określa kierunek obiektu z dokładnościądo szerokości wiązki (zwykle kilku stopni). Połączenie tych dwóch informacji jedno-znacznie wyznacza położenie obiektu.
W bistatycznym radarze pasywnym sytuacja jest bardziej skomplikowana. Stała od-ległość bistatyczna określa elipsę (w przypadku dwuwymiarowym) lub elipsoidę (wprzypadku trójwymiarowym), na której znajduje się obiekt. Ogniska elipsy bądź elip-soidy są zlokalizowane w punktach położenia nadajnika oraz odbiornika. Określeniekierunku obiektu nie jest tak proste jak w klasycznym radarze. Jest to spowodowanemiędzy innymi niskimi częstotliwościami stosowanymi w radarach pasywnych. Wyko-rzystuje się tu bowiem częstotliwości rzędu kilkudziesięciu lub kilkuset megaherców.Duża długość fali sprawia, że konstrukcja anten o wąskiej wiązce jest utrudniona zewzględu na wymagane duże rozmiary. Dlatego też określanie kierunku w radarze pa-sywnym analogicznie do klasycznych radarów jest utrudnione.
Dosyć popularną metodą określania kierunku nadejścia sygnału w radarach pa-sywnych jest interferometria [39], [38]. Stosuje się wtedy dwie anteny pomiarowei jedną referencyjną. Kierunek nadejścia sygnału jest estymowany na podstawie róż-nicy fazy sygnałów docierających do dwóch anten pomiarowych. Pozycja obiektu możebyć wtedy wyznaczona jako przecięcie bistatycznej elipsy z półprostą odpowiadającąkierunkowi obiektu
[rys. 3.4 (a)
]. Wadą tej metody jest stosunkowo duży błąd okre-
ślenia pozycji wynikający z błędu estymacji kierunku. Ponadto metoda ta działa tylkow dwóch wymiarach (nie jest określana wysokość obiektu).
Najbardziej obiecującym sposobem lokalizacji obiektów jest wykorzystanie wielupar odbiornik-nadajnik. Pozycja obiektu jest wtedy wyznaczana z przecięcia bistatycz-nych elips lub elipsoid odpowiadających różnym nadajnikom
[rys. 3.4 (b)
]. Najwięk-
szym problemem tej metody jest przyporządkowywanie pomiarów pochodzących odróżnych nadajników odpowiednim obiektom. Ta niejednoznaczność przypisania wy-maga zastosowania skomplikowanych metod śledzenia uwzględniających dynamikęobiektu, jak również niepewność co do źródła pomiaru. W [36] oraz [105] przed-stawiono układy śledzenia dokonujące jednocześnie lokalizacji obiektów we współ-
45
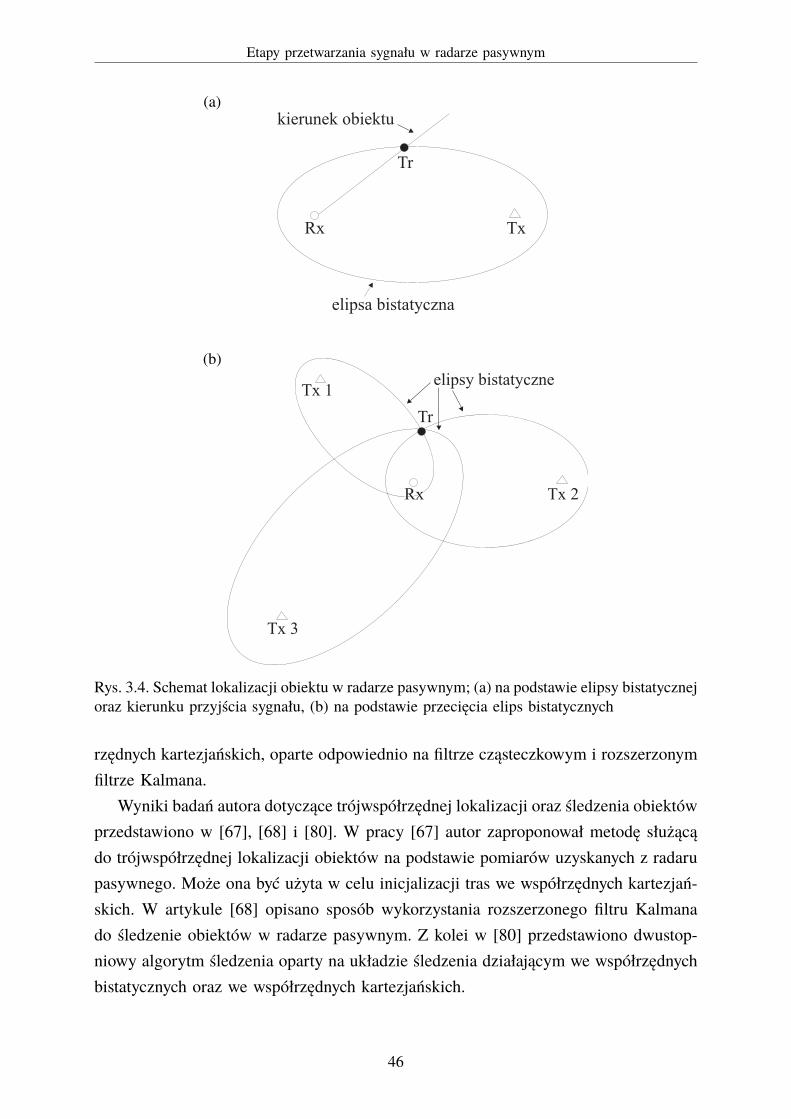
Etapy przetwarzania sygnału w radarze pasywnym
(a)
Rx
Tr
elipsa bistatyczna
kierunek obiektu
Tx
(b)
Rx
Tr
elipsy bistatyczne
Tx 2
Tx 1
Tx 3
Rys. 3.4. Schemat lokalizacji obiektu w radarze pasywnym; (a) na podstawie elipsy bistatycznejoraz kierunku przyjścia sygnału, (b) na podstawie przecięcia elips bistatycznych
rzędnych kartezjańskich, oparte odpowiednio na filtrze cząsteczkowym i rozszerzonymfiltrze Kalmana.
Wyniki badań autora dotyczące trójwspółrzędnej lokalizacji oraz śledzenia obiektówprzedstawiono w [67], [68] i [80]. W pracy [67] autor zaproponował metodę służącądo trójwspółrzędnej lokalizacji obiektów na podstawie pomiarów uzyskanych z radarupasywnego. Może ona być użyta w celu inicjalizacji tras we współrzędnych kartezjań-skich. W artykule [68] opisano sposób wykorzystania rozszerzonego filtru Kalmanado śledzenie obiektów w radarze pasywnym. Z kolei w [80] przedstawiono dwustop-niowy algorytm śledzenia oparty na układzie śledzenia działającym we współrzędnychbistatycznych oraz we współrzędnych kartezjańskich.
46
Rozdział 4
Analiza przetwarzania sygnałów
w radarze pasywnym
W rozdziale przedstawiono analizę poszczególnych etapów przetwarzania sygnałóww radarze pasywnym. Analiza ta pozwoli na powiązanie odpowiednich parametrówobiektu oraz parametrów przetwarzania sygnałów z wybranymi osiągami systemu.
4.1 Stosunek sygnału do szumu
Wzór (2.11) określa stosunek sygnału do szumu bezpośrednio po odebraniu sygnału.Na skutek procesu koherentnej integracji, realizowanego w wyniku obliczania korela-cji (3.9), stosunek sygnału do szumu zwiększa się. W idealnym przypadku stosuneksygnału do szumu po integracji SNR wynosi [3], [4]:
SNR = B·T ·SNRin = Gi·SNRin, (4.1)
gdzie T jest czasem integracji (korelacji). Iloczyn Gi = B·T jest nazywany zyskiemintegracji. W dalszej części pracy wartość SNRin będzie określana mianem wejścio-wego stosunku sygnału do szumu, natomiast SNR wyjściowym stosunkiem sygnału doszumu.
Rysunek 4.1 przedstawia przykładowe przebiegi SNR dla różnych wartości SNRin
w funkcji czasu integracji T . Obliczenia przeprowadzono dla parametrów typowych dlasygnału radia FM
[rys. 4.1(a)
]oraz sygnału telewizji cyfrowej DVB-T
[rys. 4.1(b)
].
Warto tutaj zwrócić uwagę na różne zakresy czasów integracji oraz różne wartościSNRin użyte przy obliczeniach w dwóch rozważanych przypadkach. To wynik znacz-
47
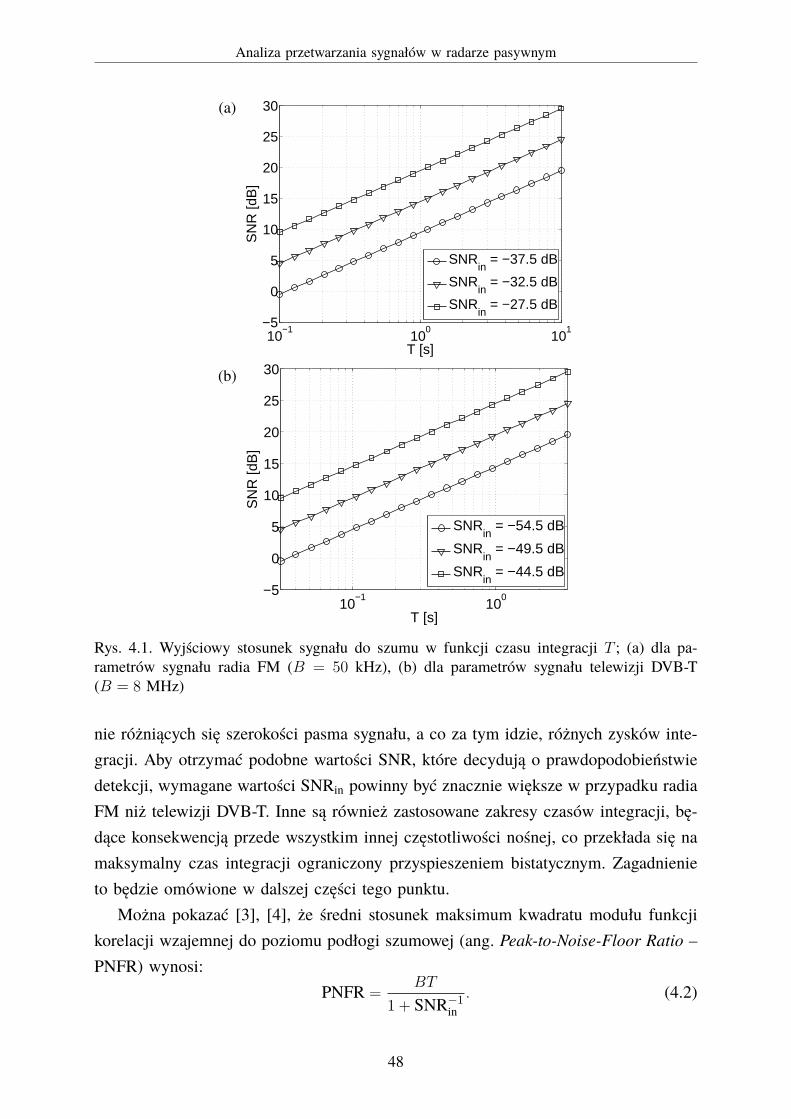
Analiza przetwarzania sygnałów w radarze pasywnym
(a)
10−1
100
101−5
0
5
10
15
20
25
30
T [s]
SN
R [d
B]
SNRin
= −37.5 dB
SNRin
= −32.5 dB
SNRin
= −27.5 dB
(b)
10−1
100−5
0
5
10
15
20
25
30
T [s]
SN
R [d
B]
SNRin
= −54.5 dB
SNRin
= −49.5 dB
SNRin
= −44.5 dB
Rys. 4.1. Wyjściowy stosunek sygnału do szumu w funkcji czasu integracji T ; (a) dla pa-rametrów sygnału radia FM (B = 50 kHz), (b) dla parametrów sygnału telewizji DVB-T(B = 8 MHz)
nie różniących się szerokości pasma sygnału, a co za tym idzie, różnych zysków inte-gracji. Aby otrzymać podobne wartości SNR, które decydują o prawdopodobieństwiedetekcji, wymagane wartości SNRin powinny być znacznie większe w przypadku radiaFM niż telewizji DVB-T. Inne są również zastosowane zakresy czasów integracji, bę-dące konsekwencją przede wszystkim innej częstotliwości nośnej, co przekłada się namaksymalny czas integracji ograniczony przyspieszeniem bistatycznym. Zagadnienieto będzie omówione w dalszej części tego punktu.
Można pokazać [3], [4], że średni stosunek maksimum kwadratu modułu funkcjikorelacji wzajemnej do poziomu podłogi szumowej (ang. Peak-to-Noise-Floor Ratio –PNFR) wynosi:
PNFR =BT
1 + SNR−1in. (4.2)
48

Analiza przetwarzania sygnałów w radarze pasywnym
Zakładając, że wejściowy stosunek sygnału do szumu SNRin jest odpowiednio mały,można przyjąć, iż pomiar PNFR jest równoważny z pomiarem SNR:
PNFR ≈ B·T ·SNRin = SNR. (4.3)
Założenie o małej wartości SNRin oznacza, że średni poziom podłogi szumowej wynikaz fluktuacji modułu funkcji nieoznaczoności spowodowanych składnikiem szumowymodebranego sygnału, a nie listkami bocznymi samego sygnału. Z drugiej strony, wartośćSNRin powinna być na tyle duża, aby pomiar wartości maksymalnej modułu funkcjinieoznaczoności nie był nadmiernie zaburzony przez szum. W praktyce średni poziompodłogi szumowej oblicza się, uśredniając funkcję nieoznaczoności w zakresie odle-głości R oraz prędkości V , w którym nie występują żadne echa obiektów. W dalszejczęści pracy stosunek sygnału do szumu SNR będzie mierzony w taki właśnie sposób.
Zgodnie ze wzorem (4.1) dłuższy czas korelacji powinien prowadzić do większegozysku integracji. W praktyce istnieją jednak pewne czynniki ograniczające czas in-tegracji T . Wzór (4.1) jest słuszny, gdy spełnione są określone założenia. Wymagasię przede wszystkim, aby amplituda sygnału była stała, zmiana skali czasu sygnałuodebranego (na skutek ruchu obiektu) była zaniedbywalna oraz model ruchu obiektuopisywał adekwatnie rzeczywisty ruch. Autor pracy w [72] przeanalizował powyższezałożenia oraz przedstawił metody, dzięki którym możliwe jest zastosowanie dłuższegoczasu integracji, a przez to osiągnięcie większego zysku integracji. Z badań autorawynika, że dla parametrów systemu opartego na sygnałach radia FM oraz telewizjiDVB-T głównym ograniczeniem czasu korelacji przy zastosowaniu funkcji nieozna-czoności (3.9) jest przyspieszenie bistatyczne obiektu. Poniżej przedstawiono krótkąanalizę tego zjawiska.
Wzór (3.9) jest wyprowadzony przy założeniu liniowego bistatycznego modelu ru-chu, tzn. przyjmuje się przybliżenie chwilowej bistatycznej odległości za pomocą wie-lomianu pierwszego stopnia. W rzeczywistości ruch obiektu może być opisany bardziejskomplikowaną formułą, tj. wielomian (2.6) może zawierać wyrazy wyższego rzędu,np. wyraz drugiego rzędu związany z przyspieszeniem obiektu. Niezgodność założo-nego modelu z rzeczywistym ruchem obiektu prowadzi do strat integracji wynikającychz braku pełnej kompensacji fazy sygnału referencyjnego oraz odebranego. Przyjmu-jąc, że różnica fazy korelowanych sygnałów na końcach przedziału integracji nie możeprzekroczyć π/2, można określić maksymalny czas integracji, który, przy ustalonym
49
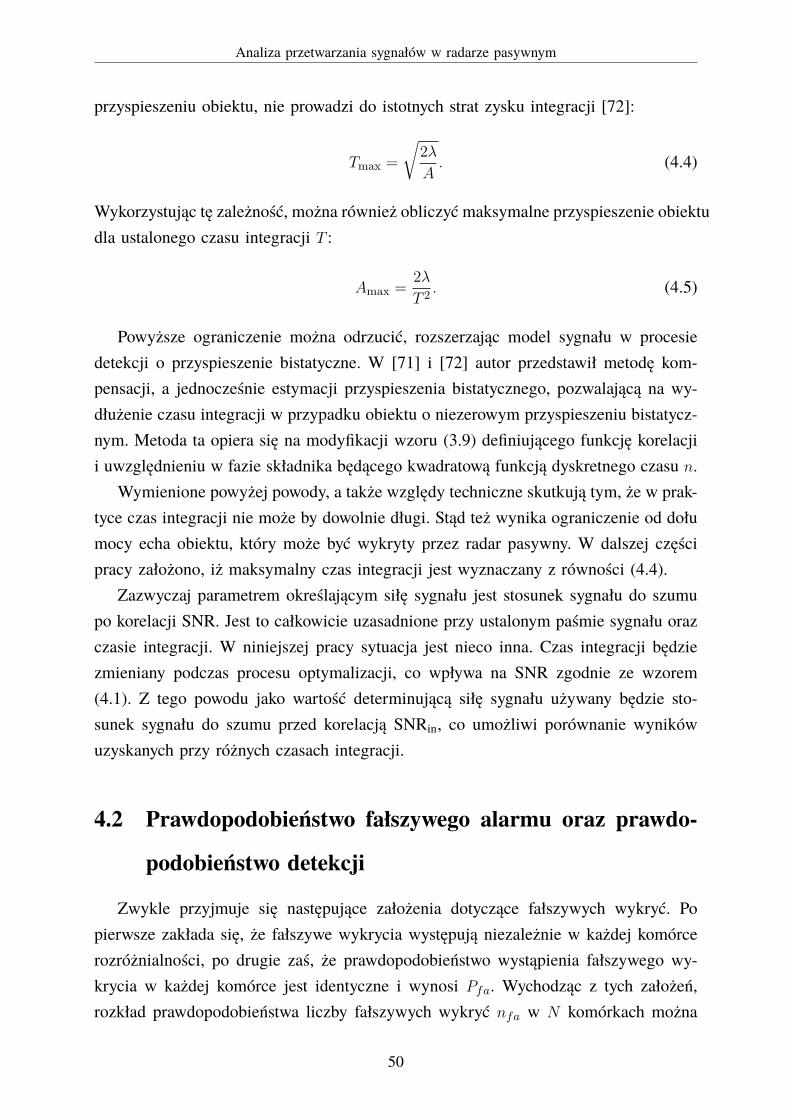
Analiza przetwarzania sygnałów w radarze pasywnym
przyspieszeniu obiektu, nie prowadzi do istotnych strat zysku integracji [72]:
Tmax =
√2λ
A. (4.4)
Wykorzystując tę zależność, można również obliczyć maksymalne przyspieszenie obiektudla ustalonego czasu integracji T :
Amax =2λ
T 2. (4.5)
Powyższe ograniczenie można odrzucić, rozszerzając model sygnału w procesiedetekcji o przyspieszenie bistatyczne. W [71] i [72] autor przedstawił metodę kom-pensacji, a jednocześnie estymacji przyspieszenia bistatycznego, pozwalającą na wy-dłużenie czasu integracji w przypadku obiektu o niezerowym przyspieszeniu bistatycz-nym. Metoda ta opiera się na modyfikacji wzoru (3.9) definiującego funkcję korelacjii uwzględnieniu w fazie składnika będącego kwadratową funkcją dyskretnego czasu n.
Wymienione powyżej powody, a także względy techniczne skutkują tym, że w prak-tyce czas integracji nie może by dowolnie długi. Stąd też wynika ograniczenie od dołumocy echa obiektu, który może być wykryty przez radar pasywny. W dalszej częścipracy założono, iż maksymalny czas integracji jest wyznaczany z równości (4.4).
Zazwyczaj parametrem określającym siłę sygnału jest stosunek sygnału do szumupo korelacji SNR. Jest to całkowicie uzasadnione przy ustalonym paśmie sygnału orazczasie integracji. W niniejszej pracy sytuacja jest nieco inna. Czas integracji będziezmieniany podczas procesu optymalizacji, co wpływa na SNR zgodnie ze wzorem(4.1). Z tego powodu jako wartość determinującą siłę sygnału używany będzie sto-sunek sygnału do szumu przed korelacją SNRin, co umożliwi porównanie wynikówuzyskanych przy różnych czasach integracji.
4.2 Prawdopodobieństwo fałszywego alarmu oraz prawdo-
podobieństwo detekcji
Zwykle przyjmuje się następujące założenia dotyczące fałszywych wykryć. Popierwsze zakłada się, że fałszywe wykrycia występują niezależnie w każdej komórcerozróżnialności, po drugie zaś, że prawdopodobieństwo wystąpienia fałszywego wy-krycia w każdej komórce jest identyczne i wynosi Pfa. Wychodząc z tych założeń,rozkład prawdopodobieństwa liczby fałszywych wykryć nfa w N komórkach można
50

Analiza przetwarzania sygnałów w radarze pasywnym
wyrazić za pomocą rozkładu Bernoulliego [12]:
P{nfa = m
}= µfa(m) =
(N
m
)Pmfa(1− Pfa)N−m. (4.6)
Wzór (4.6) będzie wykorzystany w dalszej części pracy do określenia prawdopodo-bieństwa wystąpienia fałszywego wykrycia w bramce asocjacyjnej. Często spotykanymw radiolokacji przybliżeniem powyższego wzoru jest rozkład Poissona [12]. To przy-bliżenie nie będzie jednak stosowane w pracy.
Oprócz rozkładu prawdopodobieństwa liczby fałszywych alarmów opisanej wzorem(4.6), istotny jest także rozkład wartości fałszywych wykryć. W dodatku 9.1 pokazano,że wartości kwadratu modułu funkcji niejednoznaczności |ψ(R, V )|2 (przy braku echaobiektu w sygnale) mają rozkład wykładniczy o postaci:
f(x) =
{0 x < 01µe− xµ x ≥ 0
, (4.7)
gdzie µ jest parametrem określającym wartość średnią rozkładu. Prawdopodobieństwofałszywego alarmu można wyznaczyć jako następującą całkę:
Pfa =
∞w
D
f(x)dx = e−Dµ , (4.8)
gdzie D > 0 jest wybranym progiem detekcji. Przekształcając powyższą zależność,możemy obliczyć wartość progu dla zadanego prawdopodobieństwa fałszywego alarmu[93]:
D = −µ ln(Pfa). (4.9)
Wartość progu detekcji określa prawdopodobieństwo fałszywego alarmu, ale wpływarównież na prawdopodobieństwo detekcji obiektu. Można pokazać, że dla echa obiektuze stałą (niefluktuującą) amplitudą, prawdopodobieństwo detekcji wynosi [37], [93]:
Pd = Q
[√2SNR,
√−2 ln
(Pfa)], (4.10)
gdzie Q(·) jest funkcją Marcuma. Przykładowe krzywe prawdopodobieństwa detekcjidla różnych wartości Pfa przedstawiono na rys. 4.2. Na wykresach widać, że prawdo-podobieństwo detekcji zmienia się prawie w całym zakresie od 0 do 1 dla SNR od5 do 15 dB.
51
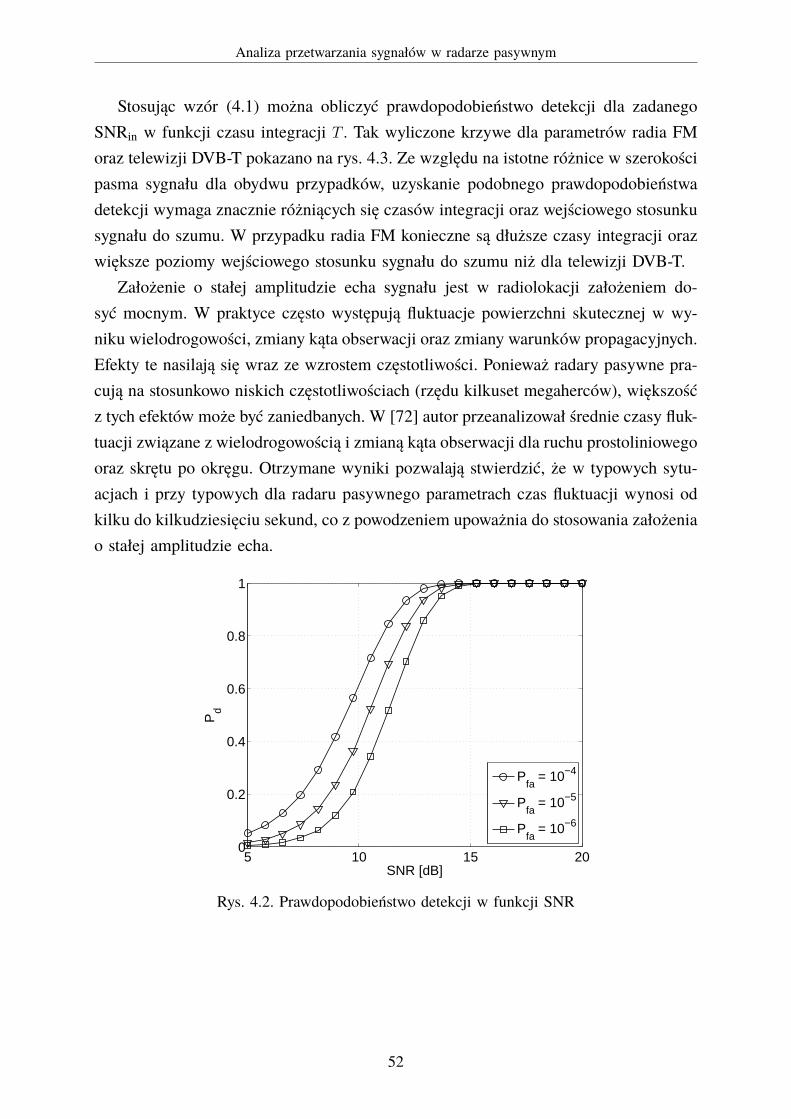
Analiza przetwarzania sygnałów w radarze pasywnym
Stosując wzór (4.1) można obliczyć prawdopodobieństwo detekcji dla zadanegoSNRin w funkcji czasu integracji T . Tak wyliczone krzywe dla parametrów radia FMoraz telewizji DVB-T pokazano na rys. 4.3. Ze względu na istotne różnice w szerokościpasma sygnału dla obydwu przypadków, uzyskanie podobnego prawdopodobieństwadetekcji wymaga znacznie różniących się czasów integracji oraz wejściowego stosunkusygnału do szumu. W przypadku radia FM konieczne są dłuższe czasy integracji orazwiększe poziomy wejściowego stosunku sygnału do szumu niż dla telewizji DVB-T.
Założenie o stałej amplitudzie echa sygnału jest w radiolokacji założeniem do-syć mocnym. W praktyce często występują fluktuacje powierzchni skutecznej w wy-niku wielodrogowości, zmiany kąta obserwacji oraz zmiany warunków propagacyjnych.Efekty te nasilają się wraz ze wzrostem częstotliwości. Ponieważ radary pasywne pra-cują na stosunkowo niskich częstotliwościach (rzędu kilkuset megaherców), większośćz tych efektów może być zaniedbanych. W [72] autor przeanalizował średnie czasy fluk-tuacji związane z wielodrogowością i zmianą kąta obserwacji dla ruchu prostoliniowegooraz skrętu po okręgu. Otrzymane wyniki pozwalają stwierdzić, że w typowych sytu-acjach i przy typowych dla radaru pasywnego parametrach czas fluktuacji wynosi odkilku do kilkudziesięciu sekund, co z powodzeniem upoważnia do stosowania założeniao stałej amplitudzie echa.
5 10 15 200
0.2
0.4
0.6
0.8
1
SNR [dB]
Pd
Pfa
= 10−4
Pfa
= 10−5
Pfa
= 10−6
Rys. 4.2. Prawdopodobieństwo detekcji w funkcji SNR
52
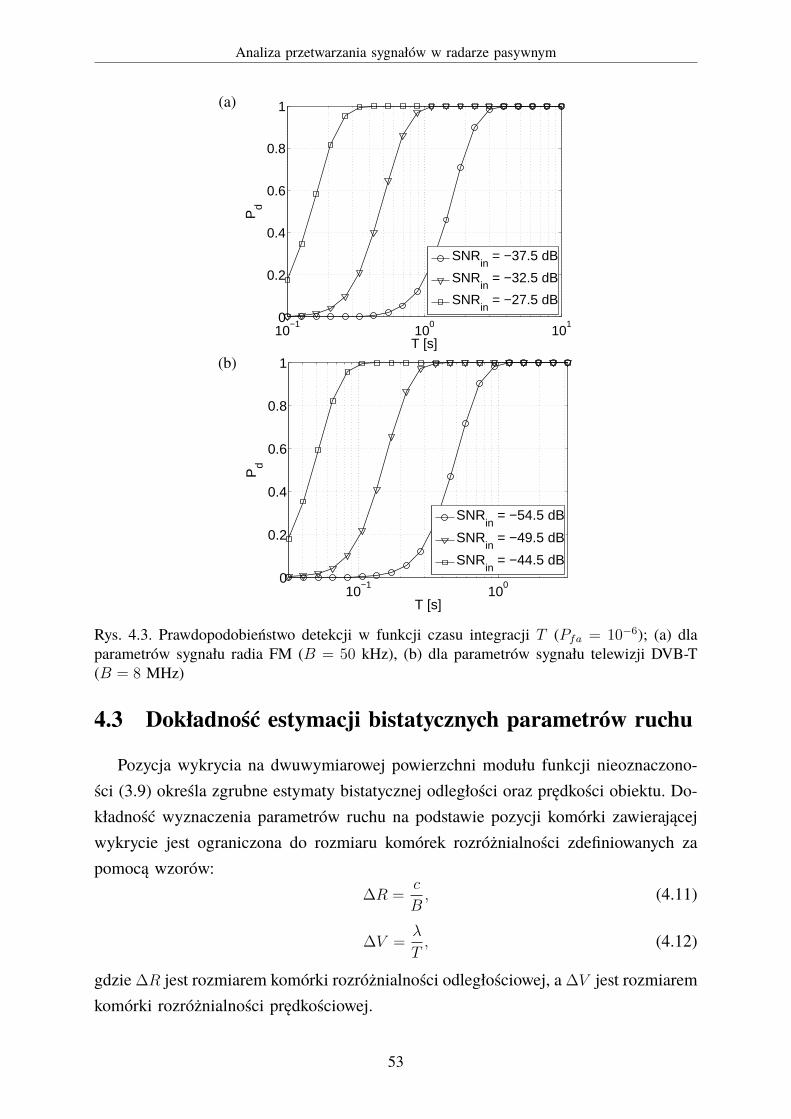
Analiza przetwarzania sygnałów w radarze pasywnym
(a)
10−1
100
1010
0.2
0.4
0.6
0.8
1
T [s]
Pd
SNRin
= −37.5 dB
SNRin
= −32.5 dB
SNRin
= −27.5 dB
(b)
10−1
1000
0.2
0.4
0.6
0.8
1
T [s]
Pd
SNRin
= −54.5 dB
SNRin
= −49.5 dB
SNRin
= −44.5 dB
Rys. 4.3. Prawdopodobieństwo detekcji w funkcji czasu integracji T (Pfa = 10−6); (a) dlaparametrów sygnału radia FM (B = 50 kHz), (b) dla parametrów sygnału telewizji DVB-T(B = 8 MHz)
4.3 Dokładność estymacji bistatycznych parametrów ruchu
Pozycja wykrycia na dwuwymiarowej powierzchni modułu funkcji nieoznaczono-ści (3.9) określa zgrubne estymaty bistatycznej odległości oraz prędkości obiektu. Do-kładność wyznaczenia parametrów ruchu na podstawie pozycji komórki zawierającejwykrycie jest ograniczona do rozmiaru komórek rozróżnialności zdefiniowanych zapomocą wzorów:
∆R =c
B, (4.11)
∆V =λ
T, (4.12)
gdzie ∆R jest rozmiarem komórki rozróżnialności odległościowej, a ∆V jest rozmiaremkomórki rozróżnialności prędkościowej.
53
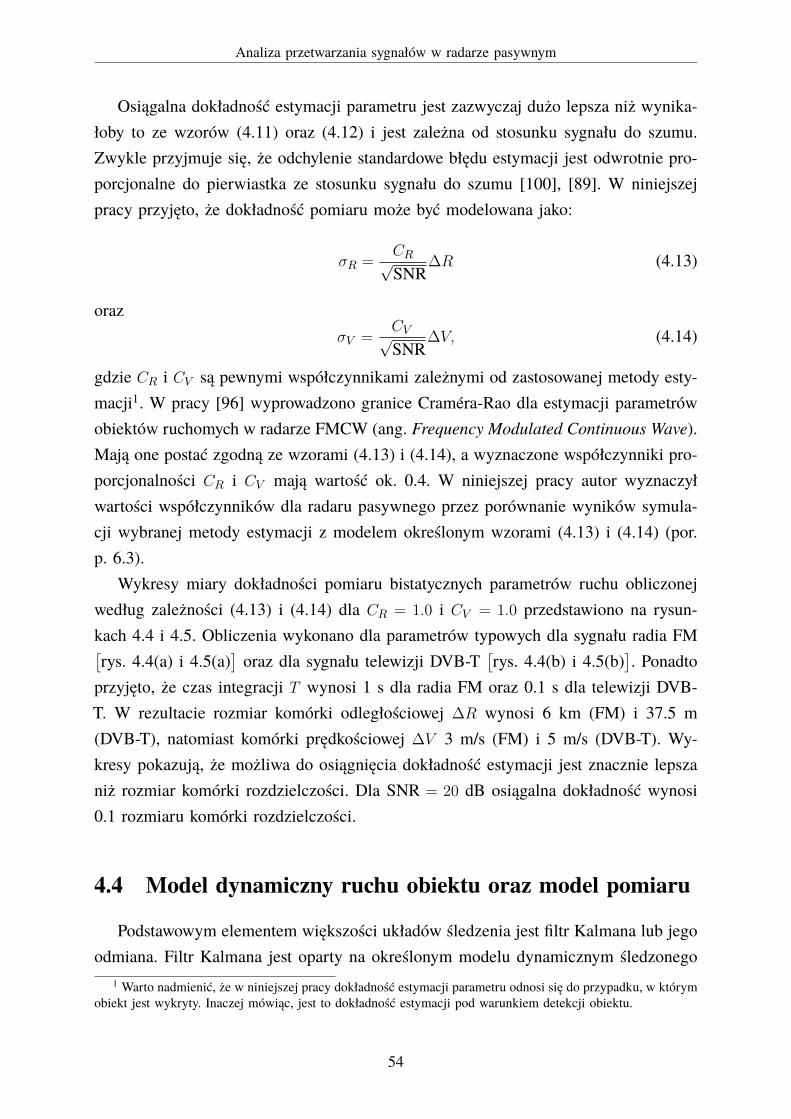
Analiza przetwarzania sygnałów w radarze pasywnym
Osiągalna dokładność estymacji parametru jest zazwyczaj dużo lepsza niż wynika-łoby to ze wzorów (4.11) oraz (4.12) i jest zależna od stosunku sygnału do szumu.Zwykle przyjmuje się, że odchylenie standardowe błędu estymacji jest odwrotnie pro-porcjonalne do pierwiastka ze stosunku sygnału do szumu [100], [89]. W niniejszejpracy przyjęto, że dokładność pomiaru może być modelowana jako:
σR =CR√SNR
∆R (4.13)
orazσV =
CV√SNR
∆V, (4.14)
gdzie CR i CV są pewnymi współczynnikami zależnymi od zastosowanej metody esty-macji1. W pracy [96] wyprowadzono granice Craméra-Rao dla estymacji parametrówobiektów ruchomych w radarze FMCW (ang. Frequency Modulated Continuous Wave).Mają one postać zgodną ze wzorami (4.13) i (4.14), a wyznaczone współczynniki pro-porcjonalności CR i CV mają wartość ok. 0.4. W niniejszej pracy autor wyznaczyłwartości współczynników dla radaru pasywnego przez porównanie wyników symula-cji wybranej metody estymacji z modelem określonym wzorami (4.13) i (4.14) (por.p. 6.3).
Wykresy miary dokładności pomiaru bistatycznych parametrów ruchu obliczonejwedług zależności (4.13) i (4.14) dla CR = 1.0 i CV = 1.0 przedstawiono na rysun-kach 4.4 i 4.5. Obliczenia wykonano dla parametrów typowych dla sygnału radia FM[rys. 4.4(a) i 4.5(a)
]oraz dla sygnału telewizji DVB-T
[rys. 4.4(b) i 4.5(b)
]. Ponadto
przyjęto, że czas integracji T wynosi 1 s dla radia FM oraz 0.1 s dla telewizji DVB-T. W rezultacie rozmiar komórki odległościowej ∆R wynosi 6 km (FM) i 37.5 m(DVB-T), natomiast komórki prędkościowej ∆V 3 m/s (FM) i 5 m/s (DVB-T). Wy-kresy pokazują, że możliwa do osiągnięcia dokładność estymacji jest znacznie lepszaniż rozmiar komórki rozdzielczości. Dla SNR = 20 dB osiągalna dokładność wynosi0.1 rozmiaru komórki rozdzielczości.
4.4 Model dynamiczny ruchu obiektu oraz model pomiaru
Podstawowym elementem większości układów śledzenia jest filtr Kalmana lub jegoodmiana. Filtr Kalmana jest oparty na określonym modelu dynamicznym śledzonego
1 Warto nadmienić, że w niniejszej pracy dokładność estymacji parametru odnosi się do przypadku, w którymobiekt jest wykryty. Inaczej mówiąc, jest to dokładność estymacji pod warunkiem detekcji obiektu.
54
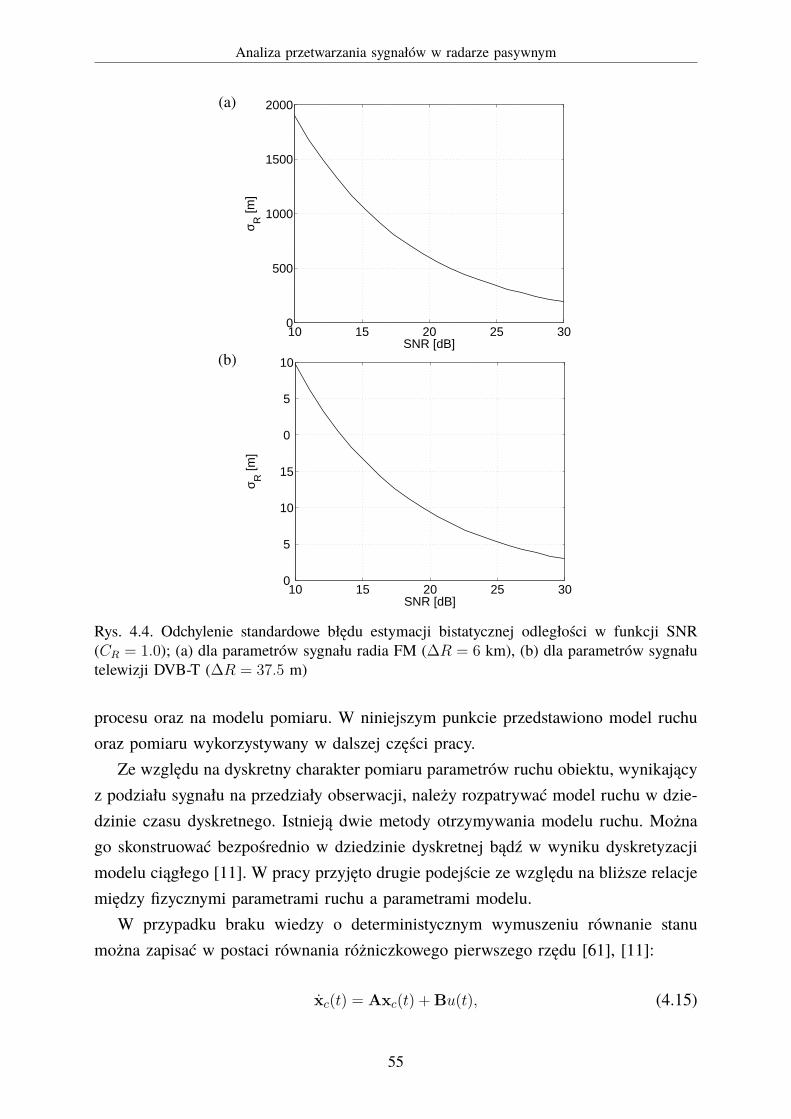
Analiza przetwarzania sygnałów w radarze pasywnym
(a)
10 15 20 25 300
500
1000
1500
2000
SNR [dB]
σ R [m
]
(b)
10 15 20 25 30 0
5
10
15
0
5
10
SNR [dB]
σ R [m
]
Rys. 4.4. Odchylenie standardowe błędu estymacji bistatycznej odległości w funkcji SNR(CR = 1.0); (a) dla parametrów sygnału radia FM (∆R = 6 km), (b) dla parametrów sygnałutelewizji DVB-T (∆R = 37.5 m)
procesu oraz na modelu pomiaru. W niniejszym punkcie przedstawiono model ruchuoraz pomiaru wykorzystywany w dalszej części pracy.
Ze względu na dyskretny charakter pomiaru parametrów ruchu obiektu, wynikającyz podziału sygnału na przedziały obserwacji, należy rozpatrywać model ruchu w dzie-dzinie czasu dyskretnego. Istnieją dwie metody otrzymywania modelu ruchu. Możnago skonstruować bezpośrednio w dziedzinie dyskretnej bądź w wyniku dyskretyzacjimodelu ciągłego [11]. W pracy przyjęto drugie podejście ze względu na bliższe relacjemiędzy fizycznymi parametrami ruchu a parametrami modelu.
W przypadku braku wiedzy o deterministycznym wymuszeniu równanie stanumożna zapisać w postaci równania różniczkowego pierwszego rzędu [61], [11]:
xc(t) = Axc(t) + Bu(t), (4.15)
55
Analiza przetwarzania sygnałów w radarze pasywnym
(a)
10 15 20 25 300
0.2
0.4
0.6
0.8
1
SNR [dB]
σ V [m
/s]
(b)
10 15 20 25 300
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
SNR [dB]
σ V [m
/s]
Rys. 4.5. Odchylenie standardowe błędu estymacji bistatycznej prędkości w funkcji SNR(CV = 1.0); (a) dla parametrów sygnału radia FM (∆V = 3 m/s), (b) dla parametrów sygnałutelewizji DVB-T (∆V = 5 m/s)
gdzie xc(t) jest wektorem stanu, A jest macierzą przejścia, B jest wektorem wzmoc-nienia szumu, a u(t) jest białym gaussowskim szumem procesu o zerowej wartościśredniej. Szum procesu reprezentuje nieznane dla obserwatora zmiany wektora stanu.
Przyjmując wielomianowy model ruchu trzeciego stopnia i stosując dobrze znanyz literatury model z prawie stałym przyspieszeniem [61], powyższe równanie możnaprzedstawić jako:
R(t)
V (t)
A(t)
=
0 1 0
0 0 1
0 0 0
R(t)
V (t)
A(t)
+
0
0
1
u(t). (4.16)
Aby zastosować filtr Kalmana do śledzenia obiektów w radarze, należy powyższymodel zdyskretyzować. Procedura ta polega na rozwiązaniu równania różniczkowego,
56

Analiza przetwarzania sygnałów w radarze pasywnym
a następnie wyznaczeniu odpowiednich wielkości w następującym modelu dyskretnym[11]:
x(k + 1) = Fx(k) + u(k), (4.17)
gdzie x(n) jest wektorem stanu w dziedzinie czasu dyskretnego, F jest macierzą przej-ścia w dziedzinie czasu dyskretnego, natomiast u(k) jest szumem procesu w dziedzinieczasu dyskretnego.
Po odpowiednich obliczeniach dyskretny model można zapisać w postaci [11]:
R(k + 1)
V (k + 1)
A(k + 1)
=
1 T T 2/2
0 1 T
0 0 1
R(k)
V (k)
A(k)
+ u(k), (4.18)
gdzie u(k) jest wektorem dyskretnego szumu procesu o macierzy kowariancji:
E[u(k)u′(j)
]= δ(k, j)Q, (4.19)
δ(k, j) jest funkcją Kroneckera zdefiniowaną jako:
δ(k, j) =
{1 k = j
0 k 6= j, (4.20)
a
Q = q
T 5/20 T 4/8 T 3/6
T 4/8 T 3/3 T 2/2
T 3/6 T 2/2 T
, (4.21)
gdzie q jest widmową gęstością mocy szumu procesu, określającą jego intensywność.Pomiar jest modelowany przez:
z(k) = Hx(k) + w(k), (4.22)
gdzie z(k) jest wektorem pomiarowym, H jest macierzą wyjściową (transformującąwektor stanu w wektor pomiarowy), a w(k) jest wektorem błędu pomiaru o rozkładzienormalnym i macierzy kowariancji
E[w(k)w′(j)
]= δ(k, j)R, (4.23)
57

Analiza przetwarzania sygnałów w radarze pasywnym
gdzie
R =
[σ2R 0
0 σ2V
], (4.24)
zaś σR i σV są odpowiednio dokładnościami pomiaru bistatycznej odległości orazbistatycznej prędkości, wyrażonymi wzorami (4.13) i (4.14).
Zgodnie z opisanym wcześniej schematem detekcji i estymacji, radar pasywny mie-rzy bezpośrednio bistatyczną odległość i prędkość, zatem równanie pomiarowe możnazapisać jako: [
R(k)
V (k)
]=
[1 0 0
0 1 0
]R(k)
V (k)
A(k)
+
[nR(k)
nV (k)
], (4.25)
gdzie nR(k) jest błędem pomiaru bistatycznej odległości o odchyleniu standardowymσR, natomiast nV (k) jest błędem pomiaru bistatycznej prędkości o odchyleniu standar-dowym σV .
4.5 Filtr Kalmana
Przyjmując model dynamiczny stanu oraz model pomiaru przedstawiony w poprzed-nim punkcie, optymalnym rozwiązaniem zagadnienia estymacji wektora stanu w sensiekryterium minimum błędu średniokwadratowego (ang. Minimum Mean Square Error– MMSE) jest filtr Kalmana. Optymalna filtracja kalmanowska składa się z dwóchkroków: predykcji oraz filtracji [41], [12], [1].
Predykcja stanu obiektu na następną obserwację jest dokonywana zgodnie z mode-lem (4.17) z pominięciem nieznanego składnika szumowego:
x(k + 1|k) = Fx(k|k), (4.26)
gdzie x(k+1|k) jest estymatą a priori wektora stanu, a x(k|k) jest estymatą a posterioriwektora stanu.
Macierz kowariancji estymaty procesu zmienia się zgodnie z równaniem:
P(k + 1|k) = FP(k|k)F′ + Q, (4.27)
58
Analiza przetwarzania sygnałów w radarze pasywnym
gdzie P(k + 1|k) = E [x(k + 1|k)x′(k + 1|k)] jest macierzą kowariancji estymaty stanua priori, natomiast P(k|k) = E [x(k|k)x′(k|k)] jest macierzą kowariancji estymaty stanua posteriori.
W fazie filtracji informacja o estymowanym procesie pochodząca z przeszłych ob-serwacji jest łączona z bieżącym pomiarem. Różnica pomiędzy rzeczywistym i predy-kowanym pomiarem, nazywana innowacją, jest obliczana jako:
v(k + 1) = z(k + 1)−Hx(k + 1|k). (4.28)
Niepewność związana z innowacją jest wyrażana przez macierz kowariancji innowacji:
S(k + 1) = E[v(k + 1)v′(k + 1)
]= HP(k + 1|k)H′ + R. (4.29)
Stopnień, w jakim nowy pomiar powinien być brany pod uwagę, jest określany przezwzmocnienie Kalmana:
K(k + 1) = P(k + 1|k)H′S−1(k + 1). (4.30)
Zaktualizowana estymata stanu obliczana jest następująco:
x(k + 1|k + 1) = x(k + 1|k) + K(k + 1)v(k + 1), (4.31)
natomiast macierz kowariancji estymaty zmienia się z zgodnie z zależnością:
P(k + 1|k + 1) = P(k + 1|k)−K(k + 1)HP(k + 1|k). (4.32)
Wektor stanu w filtrze Kalmana jest inicjalizowany pierwszym pomiarem. Ponieważwektor pomiarowy składa się z bistatycznej odległości oraz bistatycznej prędkości,w pierwszej obserwacji informacja o bistatycznym przyspieszeniu nie jest dostępna.W pracy przyjęto, że przyspieszenie bistatyczne w zainicjalizowanym wektorze stanujest równe zeru:
x(0|0) =
[z(0)
0
]=
R(0)
V (0)
0
. (4.33)
Ewentualne zmiany prędkości wywołane przyspieszeniem są uwzględnianie w macierzykowariancji poprzez ustalenie określonej wariancji. Alternatywnym rozwiązaniem jest
59

Analiza przetwarzania sygnałów w radarze pasywnym
Inicjalizacja:
x(0|0) =
z(0)
0
początkowa estymata wektora stanu
P(0|0) =
σ2R 0 0
0 σ2V 0
0 0 σ2A
początkowa macierz kowariancji
Predykcja:
x(k + 1|k) = Fx(k|k) estymata wektora stanu a priori
P(k + 1|k) = FP(k|k)F′ + Q macierz kowariancji a priori
Filtracja:
S(k + 1) = HP(k + 1|k)H′ + R macierz kowariancji innowacji
K(k + 1) = P(k + 1|k)H′S−1(k + 1) wzmocnienie Kalmana
v(k + 1) = z(k + 1)−Hx(k + 1|k) wektor innowacji
x(k + 1|k + 1) = x(k + 1|k) + K(k + 1)v(k + 1) estymata wektora stanu a posteriori
P(k+1|k+1) = P(k+1|k)−K(k+1)HP(k+1|k) macierz kowariancji a posteriori
Tablica 4.1. Równania filtru Kalmana
inicjalizacja dwupunktowa, co oznacza, że potrzebne są dwa pomiary do inicjalizacjiwektora stanu, przy czym przyspieszenie jest obliczane z różnicy prędkości w kolejnychpomiarach.
Początkowa wartość macierzy kowariancji estymaty procesu ma postać:
P(0|0) =
σ2R 0 0
0 σ2V 0
0 0 σ2A
, (4.34)
gdzie σ2A jest parametrem projektowym filtru odzwierciedlającym spodziewany za-
kres występujących przyspieszeń bistatycznych. Przy założeniu, że przyspieszenie jestzmienną losową rozłożoną równomiernie w przedziale 〈−Amax, Amax〉, otrzymuje się:
σ2A =
A2max
3. (4.35)
Równania opisujące filtrację kalmanowską zestawiono w tablicy 4.1.
60
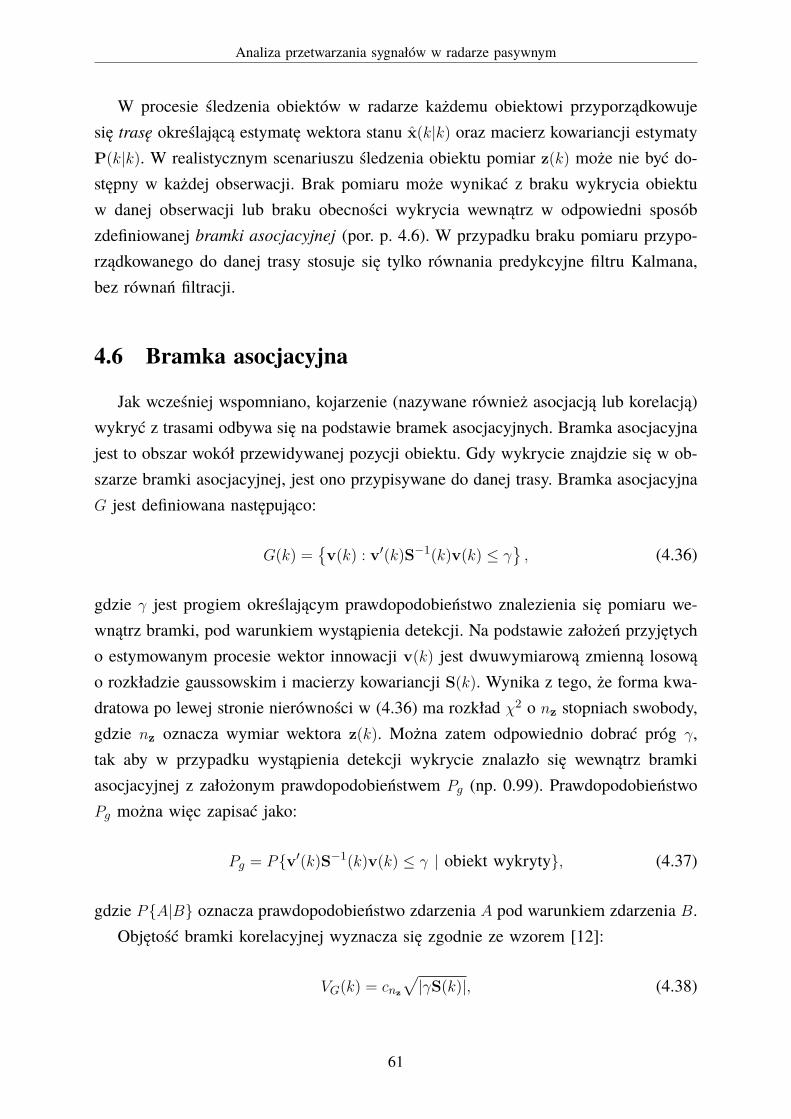
Analiza przetwarzania sygnałów w radarze pasywnym
W procesie śledzenia obiektów w radarze każdemu obiektowi przyporządkowujesię trasę określającą estymatę wektora stanu x(k|k) oraz macierz kowariancji estymatyP(k|k). W realistycznym scenariuszu śledzenia obiektu pomiar z(k) może nie być do-stępny w każdej obserwacji. Brak pomiaru może wynikać z braku wykrycia obiektuw danej obserwacji lub braku obecności wykrycia wewnątrz w odpowiedni sposóbzdefiniowanej bramki asocjacyjnej (por. p. 4.6). W przypadku braku pomiaru przypo-rządkowanego do danej trasy stosuje się tylko równania predykcyjne filtru Kalmana,bez równań filtracji.
4.6 Bramka asocjacyjna
Jak wcześniej wspomniano, kojarzenie (nazywane również asocjacją lub korelacją)wykryć z trasami odbywa się na podstawie bramek asocjacyjnych. Bramka asocjacyjnajest to obszar wokół przewidywanej pozycji obiektu. Gdy wykrycie znajdzie się w ob-szarze bramki asocjacyjnej, jest ono przypisywane do danej trasy. Bramka asocjacyjnaG jest definiowana następująco:
G(k) ={v(k) : v′(k)S−1(k)v(k) ≤ γ
}, (4.36)
gdzie γ jest progiem określającym prawdopodobieństwo znalezienia się pomiaru we-wnątrz bramki, pod warunkiem wystąpienia detekcji. Na podstawie założeń przyjętycho estymowanym procesie wektor innowacji v(k) jest dwuwymiarową zmienną losowąo rozkładzie gaussowskim i macierzy kowariancji S(k). Wynika z tego, że forma kwa-dratowa po lewej stronie nierówności w (4.36) ma rozkład χ2 o nz stopniach swobody,gdzie nz oznacza wymiar wektora z(k). Można zatem odpowiednio dobrać próg γ,tak aby w przypadku wystąpienia detekcji wykrycie znalazło się wewnątrz bramkiasocjacyjnej z założonym prawdopodobieństwem Pg (np. 0.99). PrawdopodobieństwoPg można więc zapisać jako:
Pg = P{v′(k)S−1(k)v(k) ≤ γ | obiekt wykryty}, (4.37)
gdzie P{A|B} oznacza prawdopodobieństwo zdarzenia A pod warunkiem zdarzenia B.Objętość bramki korelacyjnej wyznacza się zgodnie ze wzorem [12]:
VG(k) = cnz
√|γS(k)|, (4.38)
61
Analiza przetwarzania sygnałów w radarze pasywnym
gdzie cnz jest objętością kuli o wymiarze nz. Stałą cnz można wyznaczyć ze wzoru:
cn =πn/2
Γ(n/2 + 1), (4.39)
gdzie Γ(·) jest funkcją gamma Eulera [101]. W rozważanym przypadku nz = 2, a więccnz = π. Liczbę komórek rozróżnialności wewnątrz bramki można obliczyć następu-jąco:
NG(k) =VG(k)
∆R∆V. (4.40)
Wartość NG(k) nie musi być liczbą całkowitą.
4.7 Algorytm śledzenia
Schemat działania rozważanego w pracy układu śledzenia przedstawiono na rys. 4.6.Wykrycia pochodzące z układu detekcji są w pierwszym etapie przyporządkowywanedo tras potwierdzonych – tras, które zostały uznane za odpowiadające prawdziwymobiektom. Wektor stanu danej trasy jest aktualizowany pomiarem zgodnie z równa-niami filtracji z tablicy 4.1. Status tras nieskojarzonych z żadnymi wykryciami jestbadany pod kątem ich skasowania. Jeśli trasa nie była aktualizowana zbyt długo, jestona usuwana. Wykrycia, które nie zostały przypisane do tras potwierdzonych, są na-stępnie kojarzone z trasami tymczasowymi – trasami, co do których nie ma pewności,czy odpowiadają prawdziwym obiektom. Tu również wykorzystuje się równania fil-tracji. Trasy tymczasowe są potwierdzane lub kasowane w zależności od spełnieniawarunku określającego minimalną liczbę aktualizacji w oknie obserwacji. Wykrycianieprzypisane ani do tras potwierdzonych, ani tymczasowych są źródłem nowych trastymczasowych. Nowe trasy są tworzone zgodnie z równaniami inicjalizacji z tablicy4.1. Wszystkie trasy są następnie przewidywane na kolejną obserwację zgodnie z rów-naniami predykcji z tablicy 4.1.
4.8 Sformułowanie zagadnienia optymalizacji przetwarzania
sygnałów
Wynikiem końcowym działania współczesnego radaru jest zobrazowanie tras obiek-tów określających ich położenie, prędkość, kierunek ruchu, itp. Dlatego też, określającosiągi systemu, będące miarodajnym wyznacznikiem jakości działania całego radaru,
62
Analiza przetwarzania sygnałów w radarze pasywnym
trasypotwierdzone
wykrycia
nieprzypisanetrasyasocjacja
inicjalizacja
przypisanetrasy
kasowanietras
nieprzypisanetrasy
asocjacjapotwierdzanie
/kasowanietras
predykcjatrasy
tymczasowe przypisanetrasy
nieprzypisanewykrycia
nieprzypisanewykrycia
nowetrasy
Rys. 4.6. Algorytm działania układu śledzenia
należy brać pod uwagę właśnie trasy obiektów, a nie np. wykrycia, które są wynikiempośrednim. W pracy skupiono się na analizie przetwarzania sygnałów w radarze pasyw-nym począwszy od korelacji, na śledzeniu we współrzędnych bistatycznych kończąc.Ostatni etap przetwarzania, jakim jest lokalizacja obiektów we współrzędnych karte-zjańskich, nie wchodzi w jej zakres. Można jednakże stwierdzić, iż jakość śledzeniawe współrzędnych bistatycznych będzie mała jednoznaczny wpływ na proces lokaliza-cji obiektów na podstawie danych pochodzących z wielu par nadajnik-odbiornik, tzn.optymalizacja dokładności śledzenia we współrzędnych bistatycznych przyczyni się dozwiększenia dokładności lokalizacji obiektów we współrzędnych kartezjańskich. Po-nadto ograniczenie się do analizy śledzenia we współrzędnych bistatycznych prowadzido wyników niezależnych od geometrii sytuacji radiolokacyjnej, co nie byłoby prawdąprzy analizie śledzenia we współrzędnych kartezjańskich.
Proces śledzenia obiektów można podzielić na następujące etapy: inicjalizacja,utrzymanie oraz kasowanie trasy. W niniejszej pracy skupiono się na optymalizacjidwóch wybranych parametrów systemu: minimalizacji średniego czasu potwierdzeniatrasy prawdziwej2 oraz minimalizacji błędu śledzenia bistatycznej odległości. Uwzględ-
2 Trasa prawdziwa odpowiada rzeczywistemu obiektowi, w przeciwieństwie do trasy fałszywej powstałejwyłącznie na skutek występowania fałszywych wykryć.
63
Analiza przetwarzania sygnałów w radarze pasywnym
niane w trakcie optymalizacji dodatkowe ograniczenia częstości inicjalizacji tras fał-szywych, prawdopodobieństwa skasowania trasy prawdziwej oraz średniego czasu ka-sowania trasy fałszywej dają w rezultacie całościowe podejście do procesu śledzenia,obejmujące wszystkie fazy życia trasy. Poniżej przedstawiono uzasadnienie wyboruwymienionych parametrów.
Przy tworzeniu nowej trasy na podstawie wykryć istotnymi wyznacznikami jakościdziałania mogą być: szybkość inicjalizacji trasy, prawdopodobieństwo inicjalizacji trasypo określonym czasie, prawdopodobieństwo inicjalizacji trasy fałszywej, itp. W pracyzdecydowano się na definicję jakości inicjalizacji na podstawie średniego czasu po-trzebnego na inicjalizację trasy prawdziwej. Jak wspomniano wcześniej, wprowadze-nie dodatkowego etapu śledzenia we współrzędnych bistatycznych w znaczący sposóbułatwia lokalizację oraz śledzenie obiektów we współrzędnych kartezjańskich. Wadątakiego rozwiązania jest jednak opóźnienie czasowe wynikające z procesu inicjalizacjitrasy. Opóźnienie to może mieć istotne negatywne konsekwencje z punktu widzeniaefektywności działania całego systemu. W zastosowaniach militarnych ma to szczegól-nie duże znaczenie przy wykrywaniu obiektów potencjalnie niebezpiecznych. W takiejsytuacji opóźnienie rzędu kilku lub kilkunastu sekund może decydować o przetrwaniuna polu walki. Zbyt długi proces inicjalizacji trasy może być czynnikiem redukującymefektywne pole pokrycia radaru, ze względu na fakt, że drogę przebytą przez obiektw czasie potrzebnym do potwierdzenia trasy należy uwzględnić przy obliczaniu efek-tywnego zasięgu radaru. Ponadto, jak zostanie to pokazane, w pewnych sytuacjach czaspotwierdzenia trasy jest dosyć wrażliwy na dobór parametrów przetwarzania. Zastoso-wanie nieodpowiednich parametrów może doprowadzić do znaczącego wzrostu czasuinicjalizacji trasy, co w praktyce może prowadzić do małego prawdopodobieństwa po-twierdzenia trasy, a tym samym małego prawdopodobieństwa wykrycia obiektu przezsystem.
Chcąc zminimalizować wyłącznie średni czas inicjalizacji trasy, należałoby obniżyćpróg detekcji oraz zastosować prostą metodę inicjalizacji trasy: każde wykrycie gene-ruje potwierdzoną trasę. Takie podejście doprowadziłby do częstego potwierdzaniatras wywołanych fałszywymi wykryciami. Ponieważ do podstawowych funkcji układuśledzenia należy rozróżnianie fałszywych i prawdziwych wykryć, rozwiązanie takiejest nieakceptowalne. Z tego powodu przyjęto ograniczenie stosowane w procesie mi-nimalizacji średniego czasu potwierdzenia trasy prawdziwej, zakładając że częstośćinicjalizacji tras fałszywych nie może przekroczyć założonego progu. Dzięki temutrasy potwierdzone na wyjściu układu inicjalizacji z dużą dozą prawdopodobieństwaodpowiadają prawdziwym obiektom.
64

Analiza przetwarzania sygnałów w radarze pasywnym
Proces, w którym już zainicjalizowana trasa jest aktualizowana wykryciami z bie-żącej obserwacji, jest nazywany utrzymywaniem trasy. W tym przypadku, podobniejak przy inicjalizacji trasy, również można wymienić szereg parametrów określają-cych jakość działania systemu: dokładność śledzenia, prawdopodobieństwo utraceniatrasy, średni czas życia trasy, itp. Autor zdecydował się przyjąć dokładność śledzeniajako najistotniejszy wskaźnik określający śledzenie. Dokładność określenia odległościbistatycznej ma bowiem kluczowe znaczenie w procesie lokalizacji obiektów we współ-rzędnych kartezjańskich. Ścisła definicja miary dokładności będzie podana w dalszejczęści pracy.
W trakcie utrzymywania trasy jej status jest analizowany na podstawie liczby ak-tualizacji w określonym przedziale czasu. Jeśli trasa nie została zaktualizowana no-wym wykryciem przez zbyt długi czas, jest ona kasowana. Parametry przetwarzaniapowinny być dobrane w taki sposób, aby skasowanie prawdziwej trasy było mało praw-dopodobne. Z drugiej strony, w sytuacji gdy obiekt przestaje być widoczny dla radaru,jego trasa nie powinna istnieć zbyt długo, gdyż może wprowadzać operatora radaruw błąd. Obydwa parametry dotyczące kasowania trasy, tj. prawdopodobieństwo ska-sowania trasy prawdziwej oraz średni czas życia trasy fałszywej, zostały wzięte poduwagę w procesie minimalizacji błędu śledzenia bistatycznej odległości jako ograni-czenia.
Optymalizacja wybranych wskaźników jakości śledzenia będzie przeprowadzonana podstawie łącznej analizy następujących etapów przetwarzania: korelacji, detekcjii estymacji oraz śledzenia we współrzędnych bistatycznych. W przypadku minimali-zacji średniego czasu inicjalizacji trasy dostosowywanymi parametrami przetwarzaniasygnałów będą: czas integracji (parametr korelatora), próg detekcji określony przezprawdopodobieństwo fałszywego alarmu (parametr detektora) oraz parametry układuinicjalizacji trasy. Przy minimalizacji błędu śledzenia bistycznej odległości analizo-wany będzie wpływ następujących parametrów: czasu integracji, progu detekcji orazparametrów układu kasowania trasy.
W pierwszej kolejności przedstawione zostaną dwa osobne problemy optymalizacji:średniego czasu inicjalizacji trasy (por. p. 5.4) oraz dokładności śledzenia (por. p. 5.5).Następnie opisane zostanie zagadnienie łącznej optymalizacji tych dwóch wskaźników(por. p. 5.6).
65

Analiza przetwarzania sygnałów w radarze pasywnym
4.9 Przegląd metod śledzenia obiektów
W literaturze fachowej na temat śledzenia obiektów w radarze wyróżnia się okre-ślone klasy zagadnień, w zależności od braku lub występowania fałszywych wykryć,liczby sensorów oraz liczby śledzonych obiektów [12]. Problem inicjalizacji trasy orazśledzenia rozważany w tej pracy mieści się w obszarze zagadnień dotyczących śledze-nia pojedynczego obiektu za pomocą pojedynczego sensora w obecności zakłóceń (ang.single-sensor single-target tracking in clutter). Ponieważ śledzenie we współrzędnychbistatycznych odpowiada jednej parze nadajnik-odbiornik, mamy tutaj do czynieniaz pojedynczym sensorem (ang. single-sensor). Wyjątkiem są tzw. single frequency ne-tworks, czyli sieci nadajników transmitujące ten sam sygnał na tej samej częstotliwościnośnej. Rozwiązanie takie jest stosowane np. w telewizji cyfrowej DVB-T w niektórychkrajach, ale nie będzie ono dalej analizowane. W praktyce, oprócz wykryć spowodo-wanych obecnością obiektu, występują również fałszywe alarmy powstałe na skutekprzypadkowych fluktuacji w sygnale odebranym. Układ śledzenia powinien odróżnićprzypadkowe wykrycia od wykryć pochodzących od obiektu prawdziwego. Dlategozagadnienie śledzenia obiektu będzie rozpatrywane przy założeniu obecności zakłóceń(ang. target tracking in clutter). W ogólności może zaistnieć sytuacja, w której obszarybramek asocjacyjnych wielu tras zachodzą na siebie. Powstaje wtedy niejednoznacz-ność w przypisywaniu wykryć do poszczególnych tras. Takie zagadnienie nazywa sięśledzeniem wielu obiektów (ang. multi-target tracking). W niniejszej pracy ograni-czono się do analizy śledzenia pojedynczego obiektu (ang. single-target tracking), tzn.zakłada się, że w systemie może istnieć wiele tras jednocześnie, ale bramki asocjacyjnetych tras nie zachodzą na siebie.
Poniżej przedstawiono krótki przegląd algorytmów stosowanych we współczesnychukładach śledzenia. Metody podzielono na trzy grupy: metody estymacji stanu, metodyasocjacji danych oraz metody inicjalizacji i kasowania trasy. W każdej z nich przed-stawiono najpopularniejsze algorytmy opisywane w literaturze, a następnie wskazanoalgorytmy wykorzystywane przez autora, uzasadniając przy tym ich wybór. W roz-dziale piątym algorytmy te posłużyły do skonstruowania układu śledzenia, a w dalszejkolejności do optymalizacji jego wybranych parametrów.
4.9.1 Metody estymacji stanu
Układ śledzenia obiektów w radarze realizuje dwa główne zadania: estymację stanuobiektu oraz asocjację danych (przypisywanie wykryć do tras). Estymacja stanu jest
66
Analiza przetwarzania sygnałów w radarze pasywnym
zazwyczaj dokonywana przez zastosowanie filtru Kalmana lub jego odmian. Przy speł-nieniu wszystkich założeń poczynionych przy wyprowadzaniu równań filtru Kalmana,otrzymuje się rozwiązanie optymalne (w sensie kryterium MMSE). Głównymi założe-niami są: gaussowski charakter błędu pomiaru i szumu procesu, brak korelacji błędówpomiaru i szumu procesu oraz zgodność założonego modelu ruchu z rzeczywistymruchem obiektu.
Do głównych odmian filtru Kalmana stosowanych w praktycznych zagadnieniachśledzenia należą:
• Rozszerzony filtr Kalmana (ang. Extended Kalman Filter – EKF);
• Filtr Alfa-Beta lub filtr Alfa-Beta-Gamma;
• Modele wzajemnie oddziałujące (ang. Interacting Multiple Models – IMM).
W przypadku kiedy związek wektora stanu oraz wektora pomiarowego lub/i ewo-lucja wektora stanu są opisane za pomocą funkcji nieliniowej, stosuje się rozszerzonyfiltr Kalmana (ang. Extended Kalman Filter – EKF) [12]. Sam filtr działa identyczniez podstawową wersją filtru Kalmana, przy czym macierze używane przy filtracji po-wstają przez linearyzację odpowiednich równań nieliniowych. Rozwiązanie takie jestczęsto stosowane w radarach monostatycznych do konwersji pomiarów ze współrzęd-nych biegunowych do kartezjańskich.
Filtry Alfa-Beta i Alfa-Beta-Gamma są uproszczonymi (suboptymalnymi) wersjamifiltru Kalmana, używanymi w przypadku wektorów stanu składających się odpowiednioz położenia i prędkości oraz położenia, prędkości i przyspieszenia [12], [11]. W filtrachtych wzmocnienia są stałe i oblicza się je na etapie projektowania. Jest to równoważneprzyjęciu wzmocnienia jak w standardowym filtrze Kalmana pracującym w stanie usta-lonym. Ich działanie jest suboptymalne, gdyż nie bierze się tutaj pod uwagę zmianywartości macierzy kowariancji wektora stanu w trakcie śledzenia. Ten typ filtru byłpopularny w czasach, kiedy implementacja pełnego filtru Kalmana była trudna zewzględu na duży nakład obliczeniowy. Obecnie filtry Alfa-Beta(-Gamma) spotyka sięjeszcze w prostych układach śledzenia.
Ponieważ obiekt może charakteryzować się różnymi parametrami ruchu w zależ-ności od aktualnie wykonywanego manewru, niekiedy trudno jest dobrać jeden od-powiedni model ruchu. Jednym z rozwiązań tego problemu jest technika IMM [12],[82]. W metodzie tej projektant systemu wybiera kilka modeli ruchu, które w możliwiepełny sposób opisują wszystkie potencjalne manewry obiektu. Każdy z tych modeli jestaktualizowany bieżącym pomiarem, a estymata stanu obiektu jest sumą ważoną wszyst-kich modeli. Wagi są uzależnione od wyliczonego prawdopodobieństwa poprawności
67
Analiza przetwarzania sygnałów w radarze pasywnym
danego modelu. Algorytm IMM jest popularny w radarach monostatycznych, gdziezależności między parametrami obiektu we współrzędnych kartezjańskich i współrzęd-nych biegunowych (mierzonych przez radar) są dosyć proste. Najczęściej stosowanemodele to ruch prostoliniowy, skręt po okręgu lub modele o znacznie różniącej sięintensywności szumu procesu.
W pracy przyjęto, że wykorzystywaną metodą estymacji stanu będzie podstawowa(liniowa) wersja filtru Kalmana operująca we współrzędnych bistatycznych. W przy-padku radaru bistatycznego zależności między parametrami ruchu we współrzędnychkartezjańskich i bistatycznych wyrażają się skomplikowanymi funkcjami nieliniowymi(2.1), (2.2) i (2.5). Z tego powodu przyjęto model ruchu oparty na uogólnionej postaciodległości bistatycznej wyrażonej przez wielomian (2.6). Założono, iż wielomian dru-giego stopnia będzie wystarczająco dokładnie opisywał ruch obiektu. Słuszność takiegozałożenia została potwierdzona przez autora na podstawie symulacji oraz zarejestro-wanych danych rzeczywistych, jak również przez innych autorów, np. w [39]. Przyestymacji stanu we współrzędnych bistatycznych zarówno wektor stanu, jak i wektorpomiarowy wyrażone są w tych samych współrzędnych. Oznacza to, że są one po-wiązane przekształceniem liniowym i uzasadnione jest wykorzystanie liniowego filtruKalmana.
4.9.2 Metody asocjacji danych
Drugie z głównych zadań układu śledzenia, tj. asocjacja danych, może stanowićpoważne wyzwanie, zwłaszcza przy dużej liczbie fałszywych wykryć, wielu obiektachoraz wielu sensorach. W pracy zagadnienie śledzenia jest ograniczone do klasy pro-blemów śledzenia pojedynczego obiektu przez jeden sensor w obecności zakłóceń.W takim przypadku dla każdej trasy tworzy się bramkę asocjacyjną, będącą obszaremwokół przewidywanej pozycji obiektu. Wykrycie (lub wykrycia) znajdujące się we-wnątrz bramki są przypisywane do danej trasy. Różne metody asocjacji danych w od-mienny sposób uwzględniają obecność wielu wykryć wewnątrz bramki asocjacyjnej.Do najpopularniejszych metod asocjacji należą:
• NNF (ang. Nearest Neighbor Filter) – algorytm najbliższego sąsiada;
• SNF (ang. Strongest Neighbor Filter) – algorytm najsilniejszego sąsiada;
• PDAF (ang. Probabilistic Data Association Filter) – probabilistyczny algorytmasocjacyjny;
68
Analiza przetwarzania sygnałów w radarze pasywnym
• PNNF (ang. Probabilistic Nearest Neighbor Filter) – probabilistyczny algorytmnajbliższego sąsiada.
W metodzie NNF do aktualizacji trasy wykorzystuje się tylko wykrycie znajdującesię najbliżej przewidywanej pozycji obiektu [60]. Pozostałe wykrycia z bramki są igno-rowane. Zakłada się, że wszystkie wykrycia służące do aktualizacji trasy pochodzą odprawdziwego obiektu – nie stosuje się mechanizmu zwiększania niepewności estymatywynikającej z potencjalnej możliwości błędnego przypisania fałszywych wykryć dotrasy. Jest to cecha niepożądana, zwłaszcza przy dużej gęstości fałszywych wykryć.
W algorytmie SNF do aktualizacji trasy wykorzystuje się najsilniejsze wykryciespośród wszystkich znajdujących się wewnątrz bramki asocjacyjnej [59]. Podczas gdymetoda NNF jest używana do śledzenia obiektów w radarze, SNF znajduje zastosowa-nie głównie w sonarach.
W metodzie PDAF aktualizacja wektora stanu odbywa się na podstawie wszystkichwykryć wewnątrz bramki asocjacyjnej [56]. Poszczególne wykrycia są uwzględnianez wagami zależnymi między innymi od odległości od przewidywanej pozycji obiektu.Obliczane jest także prawdopodobieństwo tego, że żadne z wykryć nie pochodzi odobiektu. Metoda ta charakteryzuje się stosunkowo dużą odpornością na fałszywe wy-krycia.
Algorytm PNNF jest modyfikacją algorytmu NNF polegającą na uwzględnieniumożliwości występowania fałszywych wykryć w bramce asocjacyjnej [55], [102]. Gdyw danej obserwacji znajduje się przynajmniej jedno wykrycie wewnątrz bramki, wyzna-czane jest prawdopodobieństwo tego, że jest to wykrycie fałszywe. Obliczone prawdo-podobieństwo jest wykorzystywane przy aktualizacji wektora stanu oraz jego macierzykowariancji.
W dalszych rozważaniach zastosowano pierwszą z wymienionych metod asocjacjidanych (NNF). Fakt, że należy ona do najprostszych, nie stanowi istotnego ograni-czenia w analizowanym problemie śledzenia obiektu. Bardziej zaawansowane metodyasocjacji danych, takie jak PDAF, wykazują przewagę nad swoimi prostszymi odpo-wiednikami w sytuacjach, gdy prawdopodobieństwo wystąpienia wielu fałszywych wy-kryć w bramce nie jest pomijalne. W radarze pasywnym, ze względu na dużą częstośćodświeżania danych, rozmiar bramki asocjacyjnej (wyrażony w komórkach rozróżnial-ności) jest mały. Dzięki temu prawdopodobieństwo znalezienia się fałszywego wykry-cia wewnątrz bramki, zależne od rozmiaru bramki i prawdopodobieństwa fałszywegoalarmu, są znikome.
69
Analiza przetwarzania sygnałów w radarze pasywnym
4.9.3 Metody inicjalizacji oraz kasowania trasy
Proces tworzenia nowych tras na podstawie nieprzyporządkowanych wykryć jestnazywany inicjalizacją lub potwierdzaniem trasy. Zwykle nieprzypisane wykrycia sąźródłami nowych, tymczasowych tras. Po pewnej liczbie obserwacji trasa tymczasowajest potwierdzana lub kasowana, w zależności od spełnienia określonego warunku.Istnieje wiele metod służących do inicjalizacji trasy, spośród których najpopularniejszeto [12]:
• Logika kaskadowa – potwierdzanie trasy na podstawie liczby aktualizacji trasyw określonej liczbie obserwacji;
• Logika kaskadowa z obliczaniem logarytmicznej funkcji wiarygodności – logikakaskadowa z obliczaniem sumy znormalizowanych odległości wykryć od przewi-dywanej pozycji;
• IMMPDAF (ang. Interactive Multiple Model Probabilistic Data Association Fil-ter) – zastosowanie dwóch modeli: „brak obiektu” i „obiekt obecny”;
• IMMPDAFAI (ang. IMMPDAF Amplitude Information) – metoda IMMPDAFz dodatkowym zastosowaniem informacji o amplitudzie echa;
• MHT (ang. Multiple Hypothesis Tracking) – ewaluacja wszystkich możliwychsekwencji pomiarów.
W pierwszej metodzie potwierdzenia trasy dokonuje się, biorąc pod uwagę liczbęaktualizacji trasy w kolejnych obserwacjach w określonym oknie obserwacji o długościNc [23]. Jeśli w Nc kolejnych obserwacjach trasa była zaktualizowana na podstawiewykrycia przynajmniej Mc razy, to jej status jest zmieniany z tymczasowej na potwier-dzony. W innym przypadku trasa jest kasowana. Jest to tzw. logika „Mc/Nc”3. Istniejetakże odmiana tej techniki, na którą składają się dwa etapy inicjalizacji: w pierwszymwymagane jest wystąpienie wykryć w dwóch kolejnych obserwacjach (logika „2/2”),natomiast w drugim etapie stosowana jest klasyczna logika „Mc/Nc”. W rezultaciepowstaje algorytm „2/2xMc/Nc” [9]. Rozwiązanie takie jest zwykle stosowane w ra-darach, w których mierzona jest tylko odległość i konieczne są dwa kolejne pomiaryw celu określenia prędkości obiektu (inaczej rozmiar bramki uległby niedopuszczal-nemu powiększeniu).
3 W literaturze zwykle spotyka się oznaczenie „M/N”, ale w niniejszej pracy wprowadzono rozróżnienie nalogikę inicjalizacji trasy „Mc/Ncóraz logikę kasowania trasy „Mt/Nt”.
70
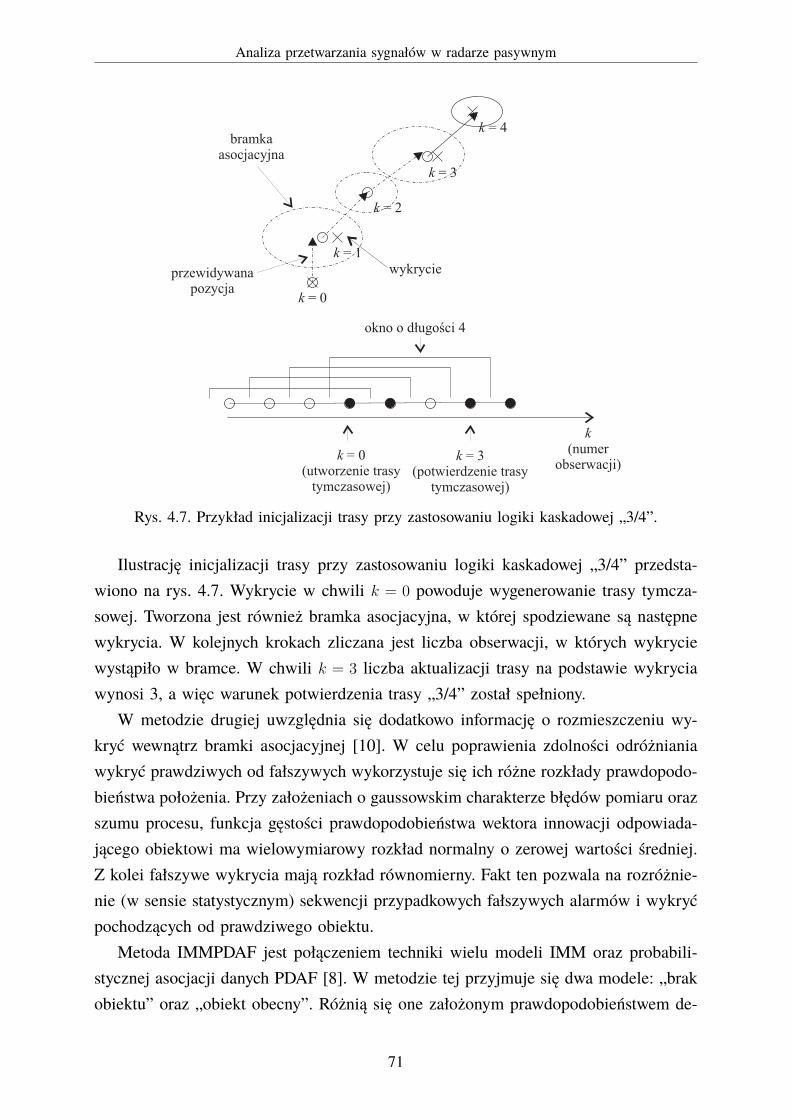
Analiza przetwarzania sygnałów w radarze pasywnym
wykrycie
bramkaasocjacyjna
przewidywanapozycja
k = 0(utworzenie trasy
tymczasowej)
k = 3(potwierdzenie trasy
tymczasowej)
okno o d³ugoœci 4
k
(numerobserwacji)
k = 0
k = 1
k = 2
k = 3
k = 4
Rys. 4.7. Przykład inicjalizacji trasy przy zastosowaniu logiki kaskadowej „3/4”.
Ilustrację inicjalizacji trasy przy zastosowaniu logiki kaskadowej „3/4” przedsta-wiono na rys. 4.7. Wykrycie w chwili k = 0 powoduje wygenerowanie trasy tymcza-sowej. Tworzona jest również bramka asocjacyjna, w której spodziewane są następnewykrycia. W kolejnych krokach zliczana jest liczba obserwacji, w których wykryciewystąpiło w bramce. W chwili k = 3 liczba aktualizacji trasy na podstawie wykryciawynosi 3, a więc warunek potwierdzenia trasy „3/4” został spełniony.
W metodzie drugiej uwzględnia się dodatkowo informację o rozmieszczeniu wy-kryć wewnątrz bramki asocjacyjnej [10]. W celu poprawienia zdolności odróżnianiawykryć prawdziwych od fałszywych wykorzystuje się ich różne rozkłady prawdopodo-bieństwa położenia. Przy założeniach o gaussowskim charakterze błędów pomiaru orazszumu procesu, funkcja gęstości prawdopodobieństwa wektora innowacji odpowiada-jącego obiektowi ma wielowymiarowy rozkład normalny o zerowej wartości średniej.Z kolei fałszywe wykrycia mają rozkład równomierny. Fakt ten pozwala na rozróżnie-nie (w sensie statystycznym) sekwencji przypadkowych fałszywych alarmów i wykryćpochodzących od prawdziwego obiektu.
Metoda IMMPDAF jest połączeniem techniki wielu modeli IMM oraz probabili-stycznej asocjacji danych PDAF [8]. W metodzie tej przyjmuje się dwa modele: „brakobiektu” oraz „obiekt obecny”. Różnią się one założonym prawdopodobieństwem de-
71
Analiza przetwarzania sygnałów w radarze pasywnym
tekcji. W pierwszym przypadku prawdopodobieństwo detekcji jest zerowe, a w drugimróżne od zera. Początkowo zakłada się, że prawdopodobieństwo poprawności obydwumodeli jest jednakowe i równe 0.5. W kolejnych obserwacjach prawdopodobieństwopoprawności modeli jest modyfikowane za pomocą wartości funkcji wiarygodnościobliczanej w dwóch działających równolegle filtrach PDAF. Po określonej liczbie ob-serwacji prawdopodobieństwo prawdziwości modelu „obiekt obecny” jest porówny-wane z ustalonym progiem i na tej podstawie trasa tymczasowa jest potwierdzana lubodrzucana.
IMMPDAFAI jest modyfikacją powyższej metody polegającą na dodatkowym wy-korzystaniu informacji o amplitudzie wykrycia [52]. Dokładniej rzecz biorąc, obliczasię amplitudowy iloraz wiarygodności będący stosunkiem funkcji gęstości prawdopo-dobieństwa szumu i echa oraz samego szumu. Następnie iloraz wiarygodności jeststosowany w filtrze PDAF jako waga, dzięki czemu silniejsze wykrycia mają większywpływ na łączną estymatę stanu oraz macierz kowariancji.
W metodzie MHT obliczane jest prawdopodobieństwo wystąpienia wszystkich mo-żliwych sekwencji pomiarów, co może również stanowić podstawę do stworzenia algo-rytmu inicjalizacji nowych tras [12]. Złożoność obliczeniowa tej metody rośnie z cza-sem bardzo szybko, dlatego stosuje się zabiegi mające na celu ograniczenie liczbymożliwych hipotez, np. przez eliminację hipotez o znikomym prawdopodobieństwie.
Ostatnia z metod, jak również liczne modyfikacje metod wymienionych wcześniej[12], dotyczą klasy algorytmów śledzenia wielu obiektów (ang. multi-target tracking),która wykracza poza zakres tej pracy.
W pracy zdecydowano się na wykorzystanie pierwszej z metod inicjalizacji trasy.Pomimo swojej prostoty, jest ona nadal często stosowana, a w rozważanym przypadkuradaru pasywnego charakteryzuje się dużą efektywnością. Wynika to przede wszystkimze specyficznych parametrów radaru pasywnego oraz postawionego zadania, tj. szybkiejinicjalizacji trasy.
W typowym radarze aktywnym komórka rozróżnialności odległościowej jest stosun-kowo mała (na poziomie dziesiątek metrów), natomiast częstość odświeżania danychjest niska (rzędu dziesiątek sekund). Wskutek tego rozmiar bramki asocjacyjnej (wyra-żony w komórkach rozróżnialności) musi być duży, aby uwzględnić manewry obiektuoraz długi czas odświeżania. W takim przypadku prosta inicjalizacja trasy na pod-stawie logiki kaskadowej może być zbyt wrażliwa na fałszywe wykrycia. W radarzepasywnym komórka rozróżnialności jest stosunkowo duża (szczególnie dla radia FM),a czas między poszczególnymi pomiarami krótki. Dzięki temu bramka asocjacyjna
72
Analiza przetwarzania sygnałów w radarze pasywnym
(wyrażona w komórkach rozróżnialności) jest dosyć mała. To z kolei przyczynia siędo dużej odporności na fałszywe wykrycia.
Drugim powodem, dla którego stosowanie bardziej wyrafinowanych metod inicja-lizacji nie jest konieczne, jest specyfika zagadnienia sformułowanego w pracy. Jakzostanie to wykazane w dalszej części pracy, wiarygodnej inicjalizacji można dokonaćjuż na podstawie 2–4 obserwacji. W takiej sytuacji przewaga bardziej skomplikowanychmetod inicjalizacji nad prostą logiką kaskadową nie jest zauważalna. Przykładowo, wy-korzystanie drugiej z wymienionych metod (logiki kaskadowej z obliczaniem funkcjiwiarygodności) ma sens dopiero wtedy, gdy dostępne są dwie innowacje, a więc potrzech obserwacjach. Istotną różnicę zauważa się jednak przy większej liczbie obser-wacji (powyżej 5) [10].
Zagadnienie kasowania potwierdzonej trasy jest komplementarne wobec inicjaliza-cji trasy. Gdy trasa zostanie potwierdzona, jej status jest badany w każdej obserwacji.W przypadku spełnienia odpowiedniego warunku, zależnego od zastosowanego algo-rytmu kasowania, trasa jest usuwana. Przykładowo, dla logiki kaskadowej „Mt/Nt”4
warunkiem skasowania trasy jest Mt braków wykryć wewnątrz bramki asocjacyjnejw trakcie ostatnich Nt obserwacji. W pracy zastosowano algorytm kasowania trasyoparty na logice kaskadowej „Mt/Nt”.
4 Jak już wspomniano, logika kaskadowa w kontekście kasowania trasy będzie oznaczana przez „Mt/Nt”.
73
Rozdział 5
Optymalizacja przetwarzania sygnałów
Optymalny dobór parametrów przetwarzania sygnałów w radarze był poruszanyw literaturze wielokrotnie. Jednak zdaniem autora dostępne publikacje nie wyczerpujątematu, zwłaszcza w przypadku radarów pasywnych.
W [25] i [24] przeprowadzono dobór progu detekcji w celu minimalizacji błęduśledzenia na podstawie graficznej metody optymalizacyjnej wykorzystującej krzyweROC (ang. Receiver Operating Characteristic) i TOC (ang. Tracker Operating Cha-racteristic). Zastosowano przy tym algorytm PDAF oraz metodę globalnego uśred-niania służącą do przewidywania zachowania się tego algorytmu w średnim sensie.W [58] posłużono się bardziej wyrafinowaną metodą predykcji zachowania się algo-rytmu PDAF – hybrydowego warunkowego uśredniania HYCA (ang. Hybrid Conditio-nal Averaging). Jako przykład zastosowania tej techniki pokazano dobór progu detekcjiw celu optymalizacji czasu życia trasy oraz dokładności śledzenia. Problem optymali-zacji rozszerzono na przypadek zmiennej w czasie sytuacji w [26]. Dobierano tam prógdetekcji adaptacyjnie tak, aby zminimalizować błąd estymacji a priori (błąd predykcji)lub a posteriori (błąd filtracji).
W przytoczonych pracach skupiono się na doborze progu detekcji – podstawo-wego parametru przetwarzania sygnału w radarze. Bardziej rozbudowaną analizę, którauwzględnia również parametry transmitowanego sygnału, takie jak amplituda impulsu,czas jego trwania oraz szybkość zmiany częstotliwości na jednostkę czasu, przeprowa-dzono w [92], [42] i [103]. Funkcję kosztu w tych publikacjach zdefiniowano jako sumęważoną dokładności śledzenia (wyrażoną przez pewną funkcję macierzy kowariancji)oraz prawdopodobieństwa utraty trasy.
Według wiedzy autora brak jest doniesień literaturowych dotyczących optymaliza-cji przetwarzania sygnałów w radarach pasywnych. Ze względu na specyfikę tego typuradarów, polegającą na wykorzystaniu zewnętrznych źródeł promieniowania, optyma-
74
Optymalizacja przetwarzania sygnałów
lizacja parametrów sygnału transmitowanego przez te źródła nie jest możliwa. Radarpasywny oferuje jednak inne możliwości wpływania na osiągi systemu. Dotyczy togłównie czasu integracji, który może być zmieniany w szerokim zakresie.
Przyjęte w pracy podejście do zagadnienia optymalizacji różni się nieco od spo-tykanych w literaturze. Po pierwsze, uwzględniany jest problem inicjalizacji trasy –zarówno szybkość inicjalizacji trasy, jak i ograniczenie liczby inicjalizowanych trasfałszywych. Autor nie zetknął się dotychczas z tak postawionym zagadnieniem w li-teraturze fachowej. Ponadto, przy analizie dokładności śledzenia brane są pod uwagętakże parametry powiązane z kasowaniem trasy, tj. prawdopodobieństwo skasowaniatrasy prawdziwej po określonym czasie oraz średni czas kasowania trasy fałszywej, corównież jest podejściem nowatorskim. Wzory określające te wielkości zostały wypro-wadzone samodzielnie przez autora.
W rozdziale wykorzystano zależności z poprzedniego rozdziału w celu powiązaniaokreślonych wskaźników systemu z parametrami obiektu oraz przetwarzania sygnału.W pierwszej części przeanalizowano kolejno: inicjalizację trasy, dokładność śledzeniaoraz kasowanie trasy. Następnie posłużono się otrzymanymi zależnościami do sformu-łowania problemów optymalizacji numerycznej dotyczących: czasu inicjalizacji trasy,dokładności śledzenia oraz optymalizacji łącznej – wiążącej obydwa zagadnienia.
5.1 Analiza inicjalizacji trasy
Powszechnie stosowaną metodą opisu i analizy inicjalizacji oraz kasowania trasprzy zastosowaniu logiki kaskadowej są łańcuchy Markowa1 [14], [23], [9], [12], [21].Przedstawione w pracy wyniki opierają się w dużej mierze na dostępnej literaturze,ale autor rozbudował tę analizę oraz uwzględnił przypadek kasowania trasy.
Przy analizie wykorzystującej łańcuchy Markowa występuje skończona liczba sta-nów trasy Si z określonymi prawdopodobieństwami przejścia pomiędzy stanami. Każdyze stanów odpowiada sekwencji (lub sekwencjom) wykryć oraz braków wykryć w oknieobserwacji o długości Nc.
Kumulacyjne prawdopodobieństwo przyjęcia stanu Si do chwili k włącznie ozna-czono przez:
µi(k) = P {łańcuch jest w stanie Si do chwili k} , (5.1)1 Wprawdzie w przypadku analizy inicjalizacji lub kasowania trasy prawdziwej przy stałym prawdopodobień-
stwie detekcji można wykorzystać uproszczoną metodę opartą na rozkładzie Bernoulliego [7], łańcuchy Markowastanowią bardziej uniwersalne narzędzie, które może zostać użyte również w przypadku analizy inicjalizacji lubkasowania trasy fałszywej.
75
Optymalizacja przetwarzania sygnałów
a wektor kolumnowy złożony z tych prawdopodobieństw przez µ(k). Poszczególneprawdopodobieństwa przejść między stanem i a stanem j oznaczono przez πij , a ma-cierz prawdopodobieństw przez Π = [πij ]. Wektor kumulacyjnego prawdopodobieństwaosiągnięcia poszczególnych stanów w chwili k + 1 można obliczyć następująco:
µ(k + 1) = Π′µ(k). (5.2)
Prawdopodobieństwo osiągnięcia stanu i w kroku k + 1 może być obliczone jako:
mi(k + 1) = µi(k + 1)− µi(k). (5.3)
Dodatkowo zdefiniowano prawdopodobieństwa:
πd = P{wykrycie wystąpiło w bramce asocjacyjnej} (5.4)
orazπnd = 1− πd = P{wykrycie nie wystąpiło w bramce asocjacyjnej}. (5.5)
Łańcuch Markowa można przedstawić jako graf skierowany, w którym wierzchołkiodpowiadają poszczególnym stanom Si, a krawędziom przyporządkowane są prawdo-podobieństwa πij przejść pomiędzy stanami. Przykładowa reprezentacja łańcucha Mar-kowa oraz odpowiednich stanów dla inicjalizacji trasy przy użyciu logiki „2/3” jestpokazana na rys. 5.1. Tabela na tym samym rysunku przedstawia stany inicjalizacjiwraz z odpowiadającą im zawartością okna obserwacji. W analizowanym przykładziedługość okna obserwacji wynosi trzy. Jedynka na wybranej pozycji oznacza obec-ność wykrycia w danej obserwacji, zaś zero jego brak. Nowe obserwacje pojawiają sięw oknie z prawej strony. Stan S5 reprezentuje potwierdzenie trasy i może odpowia-dać wielu sekwencjom wykryć, jeśli spełniają one warunek na liczbę wykryć w oknieobserwacji (w tym przypadku jest to 2 z 3). Przy analizie inicjalizacji trasy stan S5
potwierdzonej trasy jest stanem absorbującym, tzn. jeżeli jest osiągnięty, to nie jestopuszczany. Przy założeniu, że prawdopodobieństwo πd jest takie samo dla wszyst-kich stanów, macierz prawdopodobieństw przejść między stanami dla analizowanego
76
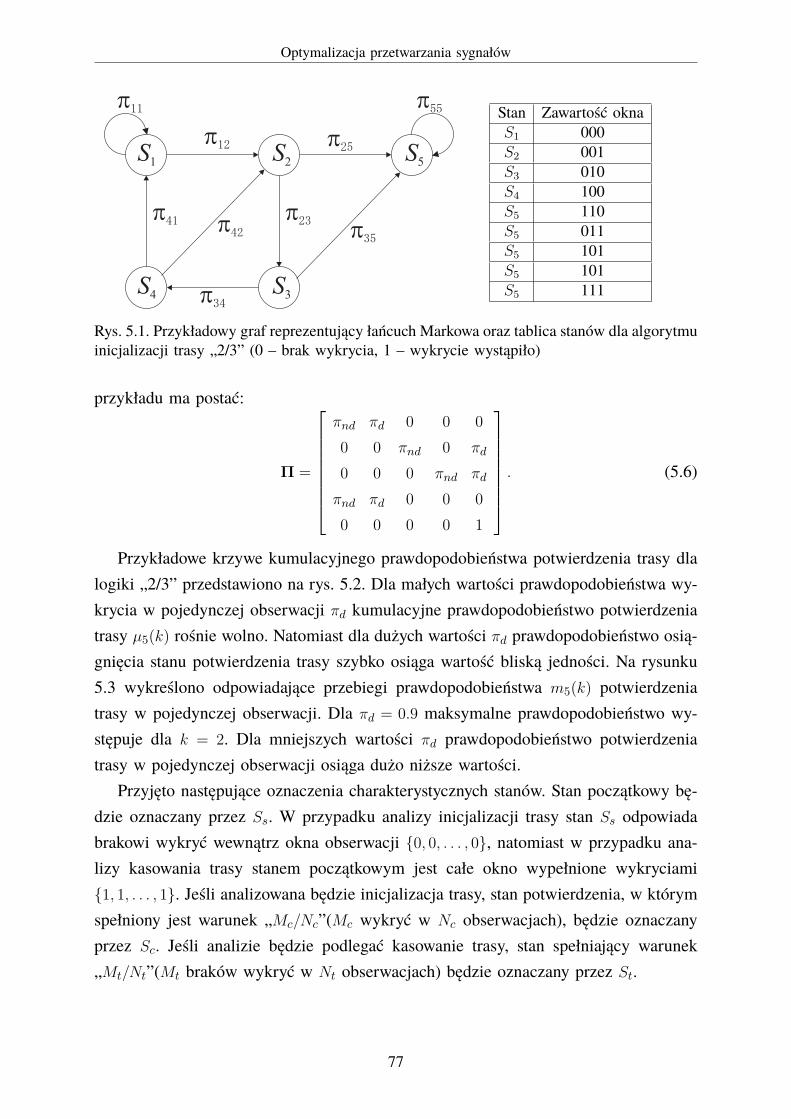
Optymalizacja przetwarzania sygnałów
S1 S2 S5
S4 S3
p25
p35
p23
p41
p34
p11
p55
p42
p12
Stan Zawartość oknaS1 000S2 001S3 010S4 100S5 110S5 011S5 101S5 101S5 111
Rys. 5.1. Przykładowy graf reprezentujący łańcuch Markowa oraz tablica stanów dla algorytmuinicjalizacji trasy „2/3” (0 – brak wykrycia, 1 – wykrycie wystąpiło)
przykładu ma postać:
Π =
πnd πd 0 0 0
0 0 πnd 0 πd
0 0 0 πnd πd
πnd πd 0 0 0
0 0 0 0 1
. (5.6)
Przykładowe krzywe kumulacyjnego prawdopodobieństwa potwierdzenia trasy dlalogiki „2/3” przedstawiono na rys. 5.2. Dla małych wartości prawdopodobieństwa wy-krycia w pojedynczej obserwacji πd kumulacyjne prawdopodobieństwo potwierdzeniatrasy µ5(k) rośnie wolno. Natomiast dla dużych wartości πd prawdopodobieństwo osią-gnięcia stanu potwierdzenia trasy szybko osiąga wartość bliską jedności. Na rysunku5.3 wykreślono odpowiadające przebiegi prawdopodobieństwa m5(k) potwierdzeniatrasy w pojedynczej obserwacji. Dla πd = 0.9 maksymalne prawdopodobieństwo wy-stępuje dla k = 2. Dla mniejszych wartości πd prawdopodobieństwo potwierdzeniatrasy w pojedynczej obserwacji osiąga dużo niższe wartości.
Przyjęto następujące oznaczenia charakterystycznych stanów. Stan początkowy bę-dzie oznaczany przez Ss. W przypadku analizy inicjalizacji trasy stan Ss odpowiadabrakowi wykryć wewnątrz okna obserwacji {0, 0, . . . , 0}, natomiast w przypadku ana-lizy kasowania trasy stanem początkowym jest całe okno wypełnione wykryciami{1, 1, . . . , 1}. Jeśli analizowana będzie inicjalizacja trasy, stan potwierdzenia, w którymspełniony jest warunek „Mc/Nc”(Mc wykryć w Nc obserwacjach), będzie oznaczanyprzez Sc. Jeśli analizie będzie podlegać kasowanie trasy, stan spełniający warunek„Mt/Nt”(Mt braków wykryć w Nt obserwacjach) będzie oznaczany przez St.
77

Optymalizacja przetwarzania sygnałów
0 5 10 15 20 25 300
0.2
0.4
0.6
0.8
1
k
µ 5(k)
πd = 0.3
πd = 0.5
πd = 0.9
Rys. 5.2. Kumulacyjne prawdopodobieństwo potwierdzenia trasy po k obserwacjach (Mc = 2,Nc = 3)
5.1.1 Średni czas inicjalizacji trasy prawdziwej
W przypadku analizy średniego czasu inicjalizacji trasy prawdziwej założone bę-dzie, że źródłem wykryć jest tylko obiekt, tj. fałszywe wykrycia są pomijane. W takiejsytuacji prawdopodobieństwo znalezienia się wykrycia wewnątrz bramki jest zależneod prawdopodobieństwa detekcji Pd oraz prawdopodobieństwa Pg znalezienia się wy-krycia wewnątrz bramki, pod warunkiem jego wystąpienia
[por. def. (4.37)
]. Można
zatem napisać, że prawdopodobieństwo przejścia do odpowiedniego stanu po wystą-pieniu detekcji wynosi πd = PdPg, a przy braku detekcji πnd = 1− PdPg.
Analizę rozpoczyna się od chwili k = 0 i stanu początkowego Ss, zatem wektorkumulacyjnego prawdopodobieństwa stanów ma postać µ(0) = [1, 0, . . . , 0]′. Ponadto,stan potwierdzenia trasy Sc jest absorbujący, tzn. stan raz osiągnięty, nie jest zmieniany,zatem πicic = 1 (gdzie ic oznacza numer stanu potwierdzenia).
Jako miarę szybkości inicjalizacji trasy przyjęto wartość średnią czasu potwierdze-nia trasy:
Tc = T
∞∑k=1
kmic(k) , 2 (5.7)
gdzie T jest czasem odświeżania danych równym czasowi integracji, a mic(k) jestprawdopodobieństwem osiągnięcia stanu potwierdzenia Sc w k-tym kroku. W tablicy
2 Ważniejsze wzory będą umieszczane w ramkach.
78
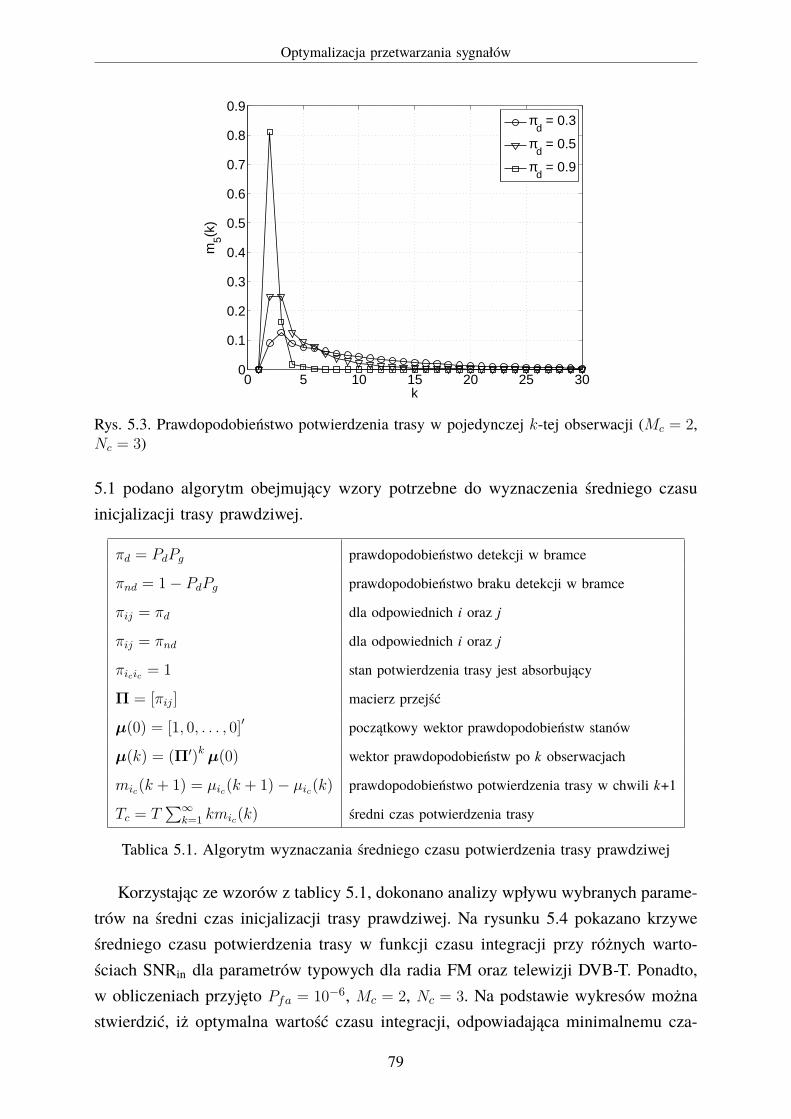
Optymalizacja przetwarzania sygnałów
0 5 10 15 20 25 300
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
k
m5(k
)
πd = 0.3
πd = 0.5
πd = 0.9
Rys. 5.3. Prawdopodobieństwo potwierdzenia trasy w pojedynczej k-tej obserwacji (Mc = 2,Nc = 3)
5.1 podano algorytm obejmujący wzory potrzebne do wyznaczenia średniego czasuinicjalizacji trasy prawdziwej.
πd = PdPg prawdopodobieństwo detekcji w bramce
πnd = 1− PdPg prawdopodobieństwo braku detekcji w bramce
πij = πd dla odpowiednich i oraz j
πij = πnd dla odpowiednich i oraz j
πicic = 1 stan potwierdzenia trasy jest absorbujący
Π = [πij] macierz przejść
µ(0) = [1, 0, . . . , 0]′ początkowy wektor prawdopodobieństw stanów
µ(k) = (Π′)k µ(0) wektor prawdopodobieństw po k obserwacjach
mic(k + 1) = µic(k + 1)− µic(k) prawdopodobieństwo potwierdzenia trasy w chwili k+1
Tc = T∑∞
k=1 kmic(k) średni czas potwierdzenia trasy
Tablica 5.1. Algorytm wyznaczania średniego czasu potwierdzenia trasy prawdziwej
Korzystając ze wzorów z tablicy 5.1, dokonano analizy wpływu wybranych parame-trów na średni czas inicjalizacji trasy prawdziwej. Na rysunku 5.4 pokazano krzyweśredniego czasu potwierdzenia trasy w funkcji czasu integracji przy różnych warto-ściach SNRin dla parametrów typowych dla radia FM oraz telewizji DVB-T. Ponadto,w obliczeniach przyjęto Pfa = 10−6, Mc = 2, Nc = 3. Na podstawie wykresów możnastwierdzić, iż optymalna wartość czasu integracji, odpowiadająca minimalnemu cza-
79
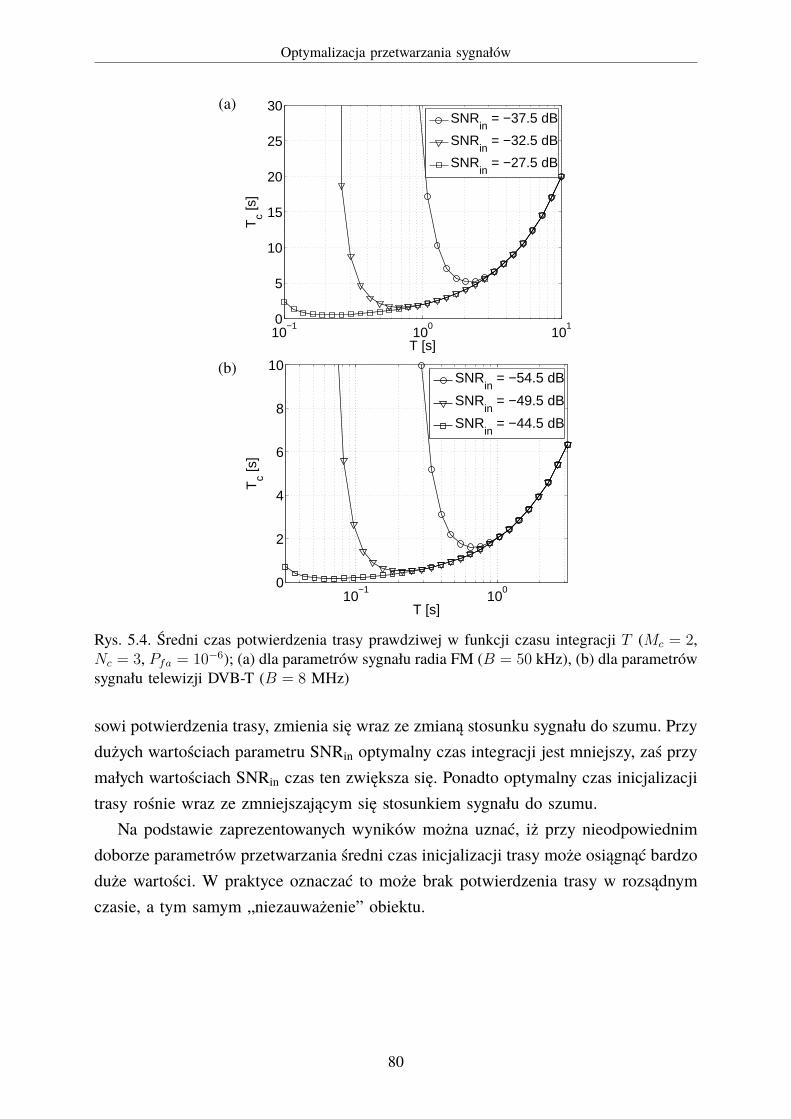
Optymalizacja przetwarzania sygnałów
(a)
10−1
100
1010
5
10
15
20
25
30
T [s]
Tc [s
]
SNRin
= −37.5 dB
SNRin
= −32.5 dB
SNRin
= −27.5 dB
(b)
10−1
1000
2
4
6
8
10
T [s]
Tc [s
]
SNRin
= −54.5 dB
SNRin
= −49.5 dB
SNRin
= −44.5 dB
Rys. 5.4. Średni czas potwierdzenia trasy prawdziwej w funkcji czasu integracji T (Mc = 2,Nc = 3, Pfa = 10−6); (a) dla parametrów sygnału radia FM (B = 50 kHz), (b) dla parametrówsygnału telewizji DVB-T (B = 8 MHz)
sowi potwierdzenia trasy, zmienia się wraz ze zmianą stosunku sygnału do szumu. Przydużych wartościach parametru SNRin optymalny czas integracji jest mniejszy, zaś przymałych wartościach SNRin czas ten zwiększa się. Ponadto optymalny czas inicjalizacjitrasy rośnie wraz ze zmniejszającym się stosunkiem sygnału do szumu.
Na podstawie zaprezentowanych wyników można uznać, iż przy nieodpowiednimdoborze parametrów przetwarzania średni czas inicjalizacji trasy może osiągnąć bardzoduże wartości. W praktyce oznaczać to może brak potwierdzenia trasy w rozsądnymczasie, a tym samym „niezauważenie” obiektu.
80

Optymalizacja przetwarzania sygnałów
5.1.2 Częstość inicjalizacji trasy fałszywej
W przypadku analizy inicjalizacji trasy fałszywej założono, iż prawdopodobieństwofałszywego alarmu jest stałe i wynosi Pfa na jedną komórkę rozróżnialności orazże jest ono takie samo dla wszystkich komórek i obserwacji. Zakłada się również,że prawdopodobieństwo wystąpienia dwóch fałszywych alarmów w jednej komórcerozróżnialności jest pomijalnie małe.
Prawdopodobieństwo inicjalizacji trasy fałszywej można obliczyć, opierając się nanastępującej obserwacji: w każdej komórce rozróżnialności w każdej obserwacji możezacząć się sekwencja, która doprowadzi do potwierdzenia fałszywej trasy bądź dopro-wadzi z powrotem do stanu początkowego [12].
Przyjęto oznaczenie stanu bez wykryć Ss = S1 = {0, 0, . . . , 0} oraz z jednym wy-kryciem S2 = {0, 1, 0, . . . , 0}. Analiza prawdopodobieństwa inicjalizacji trasy fałszywejzaczyna się w chwili k = 1 przy założeniu wektora prawdopodobieństw stanów o po-staci µ(1) = [1− Pfa, Pfa, 0, . . . , 0]. Oznacza to, że w chwili k = 1 system znajduje sięw stanie S1 z prawdopodobieństwem 1 − Pfa, a w stanie S2 z prawdopodobieństwemPfa. Ponadto, stany Ss oraz Sc są absorbujące, zatem πisis = 1 i πicic = 1.
Prawdopodobieństwo przejścia do odpowiedniego stanu przy braku wystąpienia de-tekcji wynosi µfa(0)
[por. wzór (4.6)
], przy liczbie komórek NG wynikających z wiel-
kości bramki VG(k). Zaniedbując dyskretyzację liczby komórek w bramce, można przy-jąć, że prawdopodobieństwo wystąpienia fałszywego wykrycia w bramce wynosi:
πd = 1− µfa(0) = 1− (1− Pfa)NG(k). (5.8)
Prawdopodobieństwo tego, że w bramce nie wystąpi wykrycie wynosi πnd = 1− πd.Objętość bramki asocjacyjnej zależy od macierzy kowariancji innowacji S(k), a ta
z kolei uzależniona jest od sekwencji obecności i braku wykryć wewnątrz bramki w ko-lejnych obserwacjach. Macierz S(k) zmienia się zgodnie z równaniami filtru Kalmanaz tablicy 4.1, przy czym w sytuacji braku detekcji wykorzystuje się tylko równaniapredykcji. Można to zapisać za pomocą następujących równań:
P(k + 1|k) = FP(k|k)F′ + Q, (5.9)
S(k + 1) = HP(k + 1|k)H′ + R, (5.10)
K(k + 1) = P(k + 1|k)H′S−1(k + 1), (5.11)
P(k + 1|k + 1) = P(k + 1|k)− δd(k + 1)K(k + 1)HP(k + 1|k), (5.12)
81
Optymalizacja przetwarzania sygnałów
gdzie δd(k) jest wskaźnikiem wykrycia zdefiniowanym jako:
δd(k) =
{0 brak wykrycia w bramce asocjacyjnej1 w przeciwnym przypadku
. (5.13)
Prawdopodobieństwo, że w danej komórce zostanie zainicjowana sekwencja, któradoprowadzi do potwierdzenia fałszywej trasy, wynosi µic(k) dla k = Nc, gdzie Nc jestdługością okna obserwacji. Z punktu widzenia użytkownika bardziej informacyjnymparametrem jest średnia liczba potwierdzanych tras fałszywych w systemie na jednostkęczasu (częstość potwierdzania tras fałszywych):
Nf = E{Naf
}=µic(Nc)NRNV
T, (5.14)
gdzie Naf jest zmienną losową określającą liczbę potwierdzonych fałszywych trasw systemie na jednostkę czasu, NR jest liczbą komórek odległościowych, a NV jestliczbą komórek prędkościowych obliczanych ze wzorów:
NR =Rsp∆R
, 3 (5.15)
NV =Vsp∆V
, (5.16)
gdzie Rsp i Vsp są zakresami odległości i prędkości bistatycznej, dla których obliczanajest funkcja nieoznaczoności wzajemnej, zaś rozmiary komórek rozróżnialności odle-głościowej i prędkościowej ∆R i ∆V są określone wzorami (4.11) i (4.12). Warto tutajnadmienić, że wartość NV zależy od czasu integracji, bowiem dłuższy czas integra-cji powoduje zmniejszenie się rozmiaru komórki prędkościowej
[zgodnie ze wzorem
(4.12)]. Tablica 5.2 przedstawia schematyczny algorytm wyznaczania średniej liczby
tras fałszywych inicjalizowanych w jednostce czasu.Na rysunku 5.5 przedstawiono rodzinę wykresów częstości potwierdzania tras fał-
szywych w funkcji czasu integracji dla różnych wartości prawdopodobieństwa fał-szywego alarmu. Dla krótkiego czasu integracji jego wydłużanie powoduje spadekliczby fałszywych tras. Wiąże się to ze zwiększeniem dokładności pomiaru, a za-tem ze zmniejszeniem wielkości bramki asocjacyjnej. Dla dłuższych czasów integracji
3 Liczba komórek odległościowych zależy właściwie od częstotliwości próbkowania, a nie od pasma sygnału,jak wynikałoby to z definicji ∆R. W tym przypadku chodzi jednak o efektywną liczbę komórek, dla którychprzyjmuje się, że fałszywe wykrycia występują niezależnie. Zakładając zatem, że szerokość pasma (zarówno sy-gnału, jak i szumu) jest ograniczona przez pewien filtr w odbiorniku, efektywny rozmiar komórki odległościowejjest odwrotnie proporcjonalny do szerokości tego pasma, a nie do częstotliwości próbkowania.
82
Optymalizacja przetwarzania sygnałów
πd = 1− (1− Pfa)NG(k) prawdopodobieństwo detekcji w bramce
πnd = (1− Pfa)NG(k) prawdopodobieństwo braku detekcji w bramce
πij = πd dla odpowiednich i oraz j
πij = πnd dla odpowiednich i oraz j
πisis = 1 stan początkowy jest absorbujący
πicic = 1 stan potwierdzenia trasy jest absorbujący
Π = [πij] macierz przejść
µ(1) = [1− Pfa, Pfa, 0, . . . , 0]′ początkowy wektor prawdopodobieństw stanów
µ(Nc) = (Π′)Nc−1 µ(1) wektor prawdopodobieństw stanów po Nc obserwacjach
Nf = µic (Nc)NRNVT
częstość potwierdzania tras fałszywych
Tablica 5.2. Algorytm wyznaczania średniej częstości potwierdzania tras fałszywych
obserwuje się odwrotną tendencję, co jest skutkiem przewagi rosnącej niepewnościdotyczącej parametrów obiektu, wynikającej z jego manewrowości nad zwiększonądokładnością pomiaru. Częstość inicjalizowanych tras fałszywych zależy również odprawdopodobieństwa fałszywego alarmu. Im więcej pojawia się fałszywych alarmów,tym więcej fałszywych tras będzie potwierdzanych.
Wzór (5.7) określający średni czas inicjalizacji trasy prawdziwej jest znany z lite-ratury, np. z [9] lub [12]. Podobnie w literaturze spotkać można definicję prawdopo-dobieństwa inicjalizacji trasy fałszywej. Autor wprowadził natomiast średnią częstośćinicjalizacji tras fałszywych w systemie jako uniwersalny parametr uwzględniającyzmienny czas odświeżania danych oraz zmienną wielkość komórki rozróżnialności.
Dokładniejszą analizę wpływu wybranych parametrów na średni czas inicjalizacjitrasy prawdziwej oraz częstość inicjalizacji tras fałszywych autor przedstawił w [65].
5.2 Analiza dokładności śledzenia
Podstawowym problemem przy przewidywaniu zachowania się układu śledzeniaw sensie średnim jest uwzględnienie dwóch typów niepewności: dotyczących wielko-ści ciągłych oraz wielkości dyskretnych. Do niepewności wielkości ciągłych zaliczyćmożna błąd pomiaru oraz szum procesu. Do niepewności wielkości dyskretnych należyliczba wykryć znajdujących się wewnątrz bramki asocjacyjnej (np. dla probabilistycz-nego algorytmu asocjacyjnego PDAF) lub źródło pomiaru zlokalizowanego najbliżejpredykowanej pozycji obiektu (prawdziwy obiekt lub fałszywe wykrycie – dla algo-
83
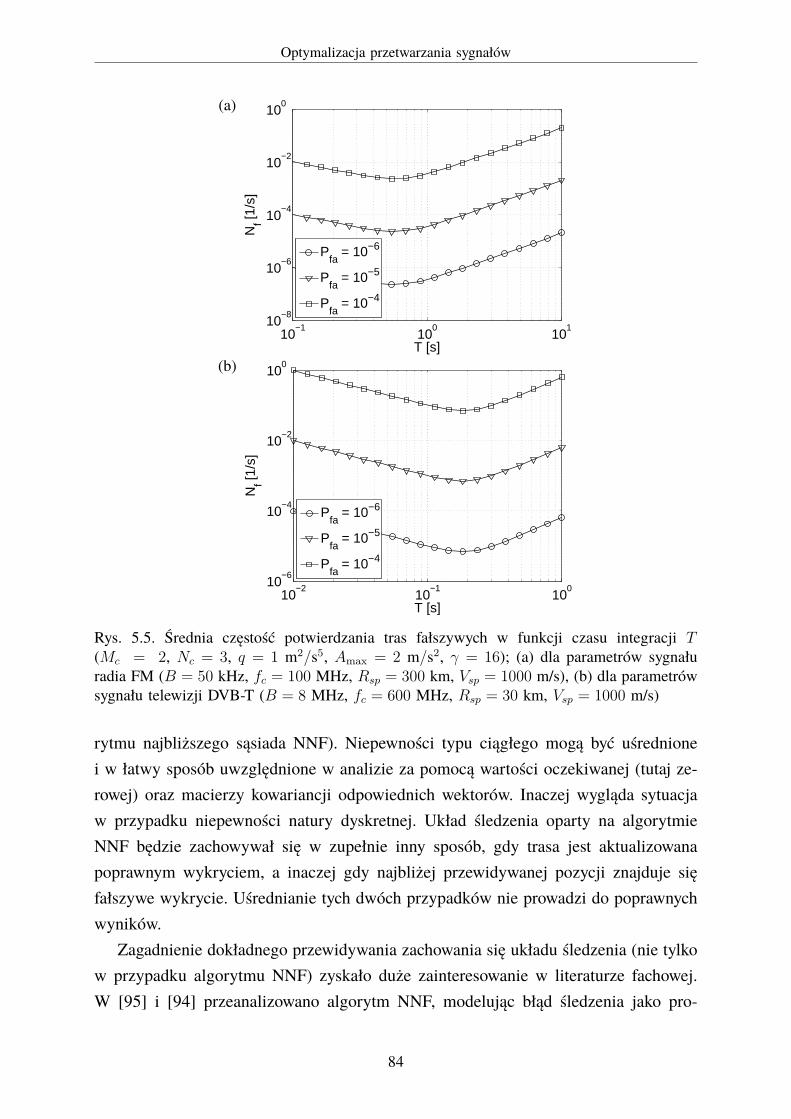
Optymalizacja przetwarzania sygnałów
(a)
10−1
100
10110
−8
10−6
10−4
10−2
100
T [s]
Nf [1
/s]
Pfa
= 10−6
Pfa
= 10−5
Pfa
= 10−4
(b)
10−2
10−1
10010
−6
10−4
10−2
100
T [s]
Nf [1
/s]
Pfa
= 10−6
Pfa
= 10−5
Pfa
= 10−4
Rys. 5.5. Średnia częstość potwierdzania tras fałszywych w funkcji czasu integracji T(Mc = 2, Nc = 3, q = 1 m2/s5, Amax = 2 m/s2, γ = 16); (a) dla parametrów sygnałuradia FM (B = 50 kHz, fc = 100 MHz, Rsp = 300 km, Vsp = 1000 m/s), (b) dla parametrówsygnału telewizji DVB-T (B = 8 MHz, fc = 600 MHz, Rsp = 30 km, Vsp = 1000 m/s)
rytmu najbliższego sąsiada NNF). Niepewności typu ciągłego mogą być uśrednionei w łatwy sposób uwzględnione w analizie za pomocą wartości oczekiwanej (tutaj ze-rowej) oraz macierzy kowariancji odpowiednich wektorów. Inaczej wygląda sytuacjaw przypadku niepewności natury dyskretnej. Układ śledzenia oparty na algorytmieNNF będzie zachowywał się w zupełnie inny sposób, gdy trasa jest aktualizowanapoprawnym wykryciem, a inaczej gdy najbliżej przewidywanej pozycji znajduje sięfałszywe wykrycie. Uśrednianie tych dwóch przypadków nie prowadzi do poprawnychwyników.
Zagadnienie dokładnego przewidywania zachowania się układu śledzenia (nie tylkow przypadku algorytmu NNF) zyskało duże zainteresowanie w literaturze fachowej.W [95] i [94] przeanalizowano algorytm NNF, modelując błąd śledzenia jako pro-
84
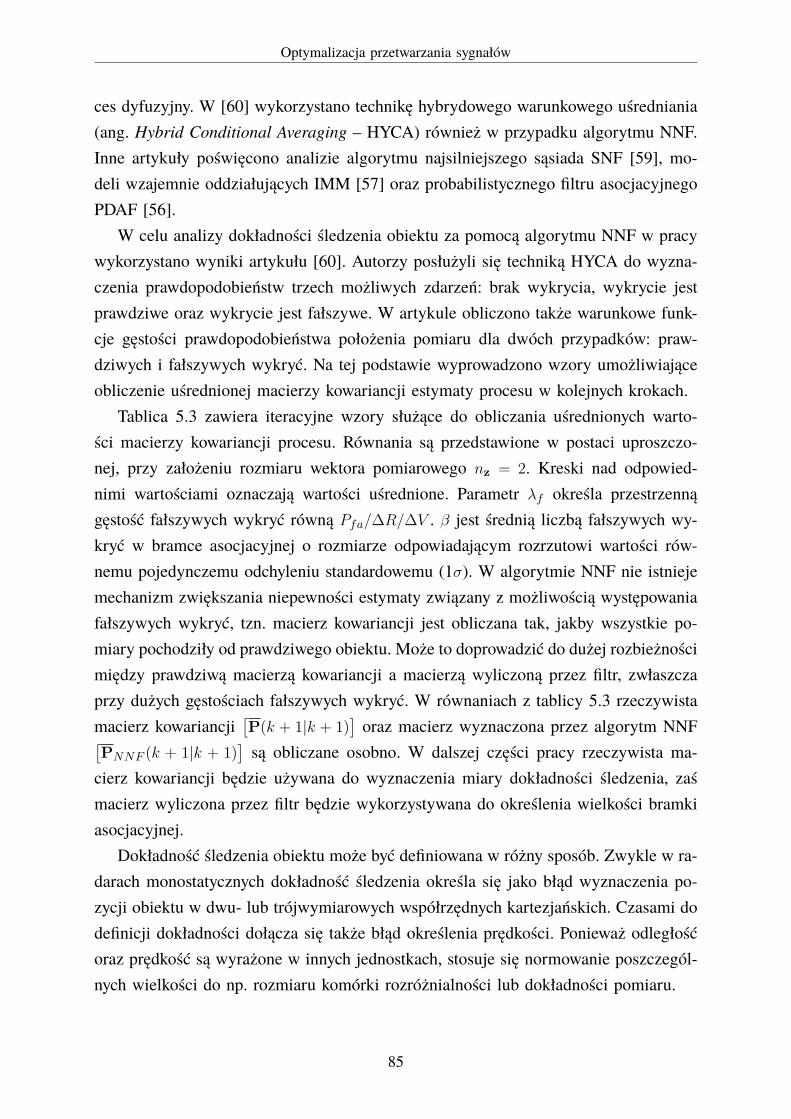
Optymalizacja przetwarzania sygnałów
ces dyfuzyjny. W [60] wykorzystano technikę hybrydowego warunkowego uśredniania(ang. Hybrid Conditional Averaging – HYCA) również w przypadku algorytmu NNF.Inne artykuły poświęcono analizie algorytmu najsilniejszego sąsiada SNF [59], mo-deli wzajemnie oddziałujących IMM [57] oraz probabilistycznego filtru asocjacyjnegoPDAF [56].
W celu analizy dokładności śledzenia obiektu za pomocą algorytmu NNF w pracywykorzystano wyniki artykułu [60]. Autorzy posłużyli się techniką HYCA do wyzna-czenia prawdopodobieństw trzech możliwych zdarzeń: brak wykrycia, wykrycie jestprawdziwe oraz wykrycie jest fałszywe. W artykule obliczono także warunkowe funk-cje gęstości prawdopodobieństwa położenia pomiaru dla dwóch przypadków: praw-dziwych i fałszywych wykryć. Na tej podstawie wyprowadzono wzory umożliwiająceobliczenie uśrednionej macierzy kowariancji estymaty procesu w kolejnych krokach.
Tablica 5.3 zawiera iteracyjne wzory służące do obliczania uśrednionych warto-ści macierzy kowariancji procesu. Równania są przedstawione w postaci uproszczo-nej, przy założeniu rozmiaru wektora pomiarowego nz = 2. Kreski nad odpowied-nimi wartościami oznaczają wartości uśrednione. Parametr λf określa przestrzennągęstość fałszywych wykryć równą Pfa/∆R/∆V . β jest średnią liczbą fałszywych wy-kryć w bramce asocjacyjnej o rozmiarze odpowiadającym rozrzutowi wartości rów-nemu pojedynczemu odchyleniu standardowemu (1σ). W algorytmie NNF nie istniejemechanizm zwiększania niepewności estymaty związany z możliwością występowaniafałszywych wykryć, tzn. macierz kowariancji jest obliczana tak, jakby wszystkie po-miary pochodziły od prawdziwego obiektu. Może to doprowadzić do dużej rozbieżnościmiędzy prawdziwą macierzą kowariancji a macierzą wyliczoną przez filtr, zwłaszczaprzy dużych gęstościach fałszywych wykryć. W równaniach z tablicy 5.3 rzeczywistamacierz kowariancji
[P(k + 1|k + 1)
]oraz macierz wyznaczona przez algorytm NNF[
PNNF (k + 1|k + 1)]
są obliczane osobno. W dalszej części pracy rzeczywista ma-cierz kowariancji będzie używana do wyznaczenia miary dokładności śledzenia, zaśmacierz wyliczona przez filtr będzie wykorzystywana do określenia wielkości bramkiasocjacyjnej.
Dokładność śledzenia obiektu może być definiowana w różny sposób. Zwykle w ra-darach monostatycznych dokładność śledzenia określa się jako błąd wyznaczenia po-zycji obiektu w dwu- lub trójwymiarowych współrzędnych kartezjańskich. Czasami dodefinicji dokładności dołącza się także błąd określenia prędkości. Ponieważ odległośćoraz prędkość są wyrażone w innych jednostkach, stosuje się normowanie poszczegól-nych wielkości do np. rozmiaru komórki rozróżnialności lub dokładności pomiaru.
85

Optymalizacja przetwarzania sygnałów
P(k + 1|k) = FP(k|k)F′ + Q macierz kowariancji a priori
S(k + 1) = HP(k + 1|k)H′ + R macierz kowariancji innowacji
K(k + 1) = P(k + 1|k)H′S−1
(k + 1) wzmocnienie Kalmana
β = λfπ|S(k)|1/2 zmienna pomocnicza
α = β + 1/2 zmienna pomocnicza
cF (k) = β/2{Pd/α
2[1− (1 + αγ)e−αγ
]+
+(1− Pd)/β2[1− (1 + βγ)e−βγ
]} zmienna powiązana z fałszy-
wymi wykryciami
cT (k) = Pd/4α2 [1− (1 + αγ)e−αγ] zmienna powiązana z prawdzi-
wymi wykryciami
P(k + 1|k + 1) = P(k + 1|k)−
− [cT (k)− cF (k)] K(k + 1)HP(k + 1|k)macierz kowariancji a posteriori
(rzeczywista)
PNNF (k + 1|k + 1) = P(k + 1|k)+
+[1− (1− PdPg)e−βγ
]K(k + 1)HP(k + 1|k)
macierz kowariancji a posteriori
(wyliczona przez filtr)
Tablica 5.3. Wzory opisujące ewolucję uśrednionej macierzy kowariancji dla algorytmu NNF(dla nz = 2)
W pracy dokładność śledzenia będzie określana w odniesieniu do bistatycznej odle-głości, gdyż jest to wielkość mająca zasadniczy wpływ na proces lokalizacji obiektówwe współrzędnych kartezjańskich. Ze względu na stosunkowo długi czas integracjiw radarze pasywnym, dokładność określenia bistatycznej prędkości jest zadowalającaw większości przypadków.
Dokładność śledzenia obiektu zmienia się z czasem. Macierz kowariancji estymatyprocesu jest inicjalizowana z wykorzystaniem wariancji błędów pojedynczego pomiaru[por. wzór (4.34)
]. W trakcie śledzenia, na skutek połączenia informacji o historii za-
chowania się obiektu oraz bieżących pomiarów, dokładność określenia parametrówruchu zwiększa się. Jako definicję skalarnego parametru wyznaczającego dokładnośćśledzenia obiektu można przyjąć np. dokładność w stanie ustalonym (dla czasu dą-żącego do nieskończoności). W przypadku radaru pasywnego czas ustalania się do-kładności śledzenia odległości jest stosunkowo długi, dlatego też jako skalarną miaręprzyjęto dokładność śledzenia po określonym czasie Ttr (np. po 30 s).
Na rysunku 5.6 przedstawiono przykładowe wykresy miar dokładności filtracji orazpredykcji w funkcji czasu dla typowych parametrów sygnałów radia FM oraz telewizjiDVB-T. Obliczenia wykonano, iterując równania z tablicy 5.3. Miara dokładności filtra-
86
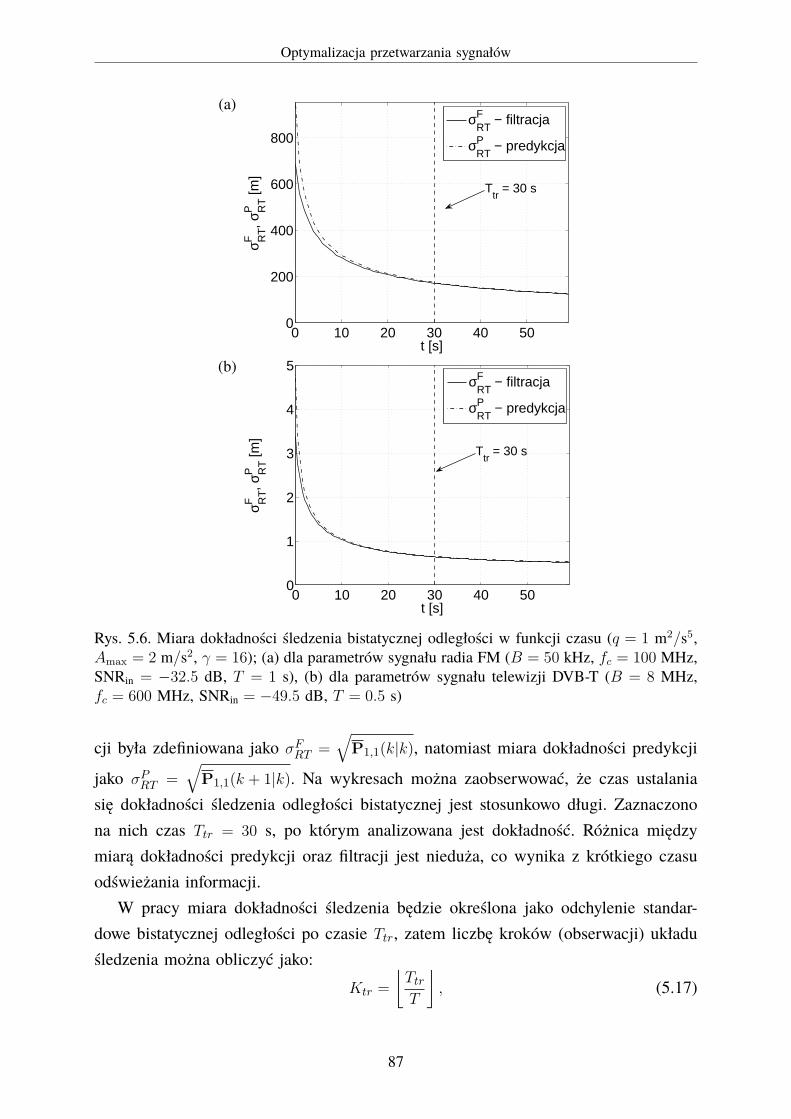
Optymalizacja przetwarzania sygnałów
(a)
0 10 20 30 40 500
200
400
600
800
t [s]
σ RT
F, σ
RT
P [m
]
σRTF − filtracja
σRTP − predykcja
Ttr = 30 s
(b)
0 10 20 30 40 50 0
1
2
3
4
5
t [s]
σ RT
F, σ
RT
P [m
]
σRTF − filtracja
σRTP − predykcja
Ttr = 30 s
Rys. 5.6. Miara dokładności śledzenia bistatycznej odległości w funkcji czasu (q = 1 m2/s5,Amax = 2 m/s2, γ = 16); (a) dla parametrów sygnału radia FM (B = 50 kHz, fc = 100 MHz,SNRin = −32.5 dB, T = 1 s), (b) dla parametrów sygnału telewizji DVB-T (B = 8 MHz,fc = 600 MHz, SNRin = −49.5 dB, T = 0.5 s)
cji była zdefiniowana jako σFRT =√
P1,1(k|k), natomiast miara dokładności predykcji
jako σPRT =√
P1,1(k + 1|k). Na wykresach można zaobserwować, że czas ustalaniasię dokładności śledzenia odległości bistatycznej jest stosunkowo długi. Zaznaczonona nich czas Ttr = 30 s, po którym analizowana jest dokładność. Różnica międzymiarą dokładności predykcji oraz filtracji jest nieduża, co wynika z krótkiego czasuodświeżania informacji.
W pracy miara dokładności śledzenia będzie określona jako odchylenie standar-dowe bistatycznej odległości po czasie Ttr, zatem liczbę kroków (obserwacji) układuśledzenia można obliczyć jako:
Ktr =
⌊TtrT
⌋, (5.17)
87

Optymalizacja przetwarzania sygnałów
gdzie operator b· c oznacza zaokrąglenie w dół do najbliższej liczby całkowitej. Wartozwrócić uwagę, że przy przetwarzaniu bloków sygnału o długości T , estymata z da-nego bloku jest dostępna dopiero po jego zakończeniu, natomiast wartość tej estymatyodpowiada środkowi przedziału obserwacji. Z tego względu, aby określić dokładnośćpo Ktr krokach, należy dokonać predykcji na czas T/2 w przód. Przyjmijmy macierzefiltru Kalmana odpowiadające predykcji na czas T/2:
FT/2 =
1 T/2 (T/2)2/2
0 1 T/2
0 0 1
(5.18)
oraz:
QT/2 = q
(T/2)5/20 (T/2)4/8 (T/2)3/6
(T/2)4/8 (T/2)3/3 (T/2)2/2
(T/2)3/6 (T/2)2/2 (T/2)
. (5.19)
Macierz kowariancji, służącą do określania dokładności po Ktr krokach, można zatemzapisać jako:
P∗ = FT/2P(Ktr|Ktr)FT/2 + QT/2. (5.20)
Jako miara dokładności śledzenia bistatycznej odległości przyjęte będzie odchyleniestandardowe zdefiniowane następująco:
σRT =√
P∗1,1 , (5.21)
gdzie P∗1,1 oznacza pierwszy element macierzy kowariancji, odpowiadający wariancjibistatycznej odległości. Im miara ta jest mniejsza, tym śledzenie jest dokładniejsze.
Na rysunku 5.7 przedstawiono przebiegi miary dokładności śledzenia w funkcjiczasu integracji T . Dla krótkich czasów integracji dokładność jest stosunkowo mała,czego głównym powodem jest niskie prawdopodobieństwo detekcji. Gdy czas integra-cji wydłuża się, dokładność poprawia się. W przypadku parametrów radia FM wartościσRT nasycają się na stałym poziomie (pewne wahania wartości wynikają ze skokowychzmian liczby obserwacji Ktr w czasie Ttr). Dla parametrów telewizji DVB-T dokład-ność maleje przy długich czasach integracji (powyżej 1 s), co jest związane z wpływemmanewrowości obiektu, wyrażonej przez parametr q w filtrze Kalamana.
Przebiegi miary dokładności w funkcji prawdopodobieństwa fałszywego alarmuwykreślono na rys. 5.8. Niska wartość Pfa odpowiada zmniejszonemu prawdopodo-bieństwu detekcji, co ma negatywny wpływ na dokładność określenia odległości bi-
88
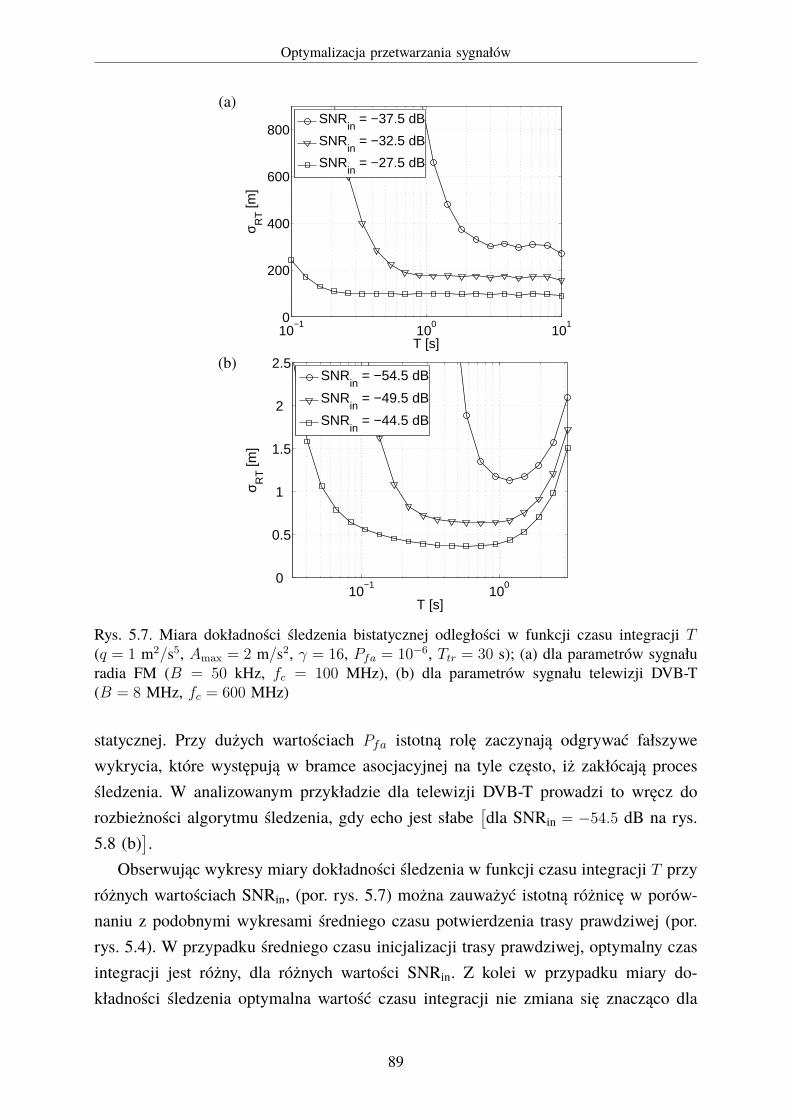
Optymalizacja przetwarzania sygnałów
(a)
10−1
100
1010
200
400
600
800
T [s]
σ RT [m
]
SNRin
= −37.5 dB
SNRin
= −32.5 dB
SNRin
= −27.5 dB
(b)
10−1
100 0
0.5
1
1.5
2
2.5
T [s]
σ RT [m
]
SNRin
= −54.5 dB
SNRin
= −49.5 dB
SNRin
= −44.5 dB
Rys. 5.7. Miara dokładności śledzenia bistatycznej odległości w funkcji czasu integracji T(q = 1 m2/s5, Amax = 2 m/s2, γ = 16, Pfa = 10−6, Ttr = 30 s); (a) dla parametrów sygnałuradia FM (B = 50 kHz, fc = 100 MHz), (b) dla parametrów sygnału telewizji DVB-T(B = 8 MHz, fc = 600 MHz)
statycznej. Przy dużych wartościach Pfa istotną rolę zaczynają odgrywać fałszywewykrycia, które występują w bramce asocjacyjnej na tyle często, iż zakłócają procesśledzenia. W analizowanym przykładzie dla telewizji DVB-T prowadzi to wręcz dorozbieżności algorytmu śledzenia, gdy echo jest słabe
[dla SNRin = −54.5 dB na rys.
5.8 (b)].
Obserwując wykresy miary dokładności śledzenia w funkcji czasu integracji T przyróżnych wartościach SNRin, (por. rys. 5.7) można zauważyć istotną różnicę w porów-naniu z podobnymi wykresami średniego czasu potwierdzenia trasy prawdziwej (por.rys. 5.4). W przypadku średniego czasu inicjalizacji trasy prawdziwej, optymalny czasintegracji jest różny, dla różnych wartości SNRin. Z kolei w przypadku miary do-kładności śledzenia optymalna wartość czasu integracji nie zmiana się znacząco dla
89
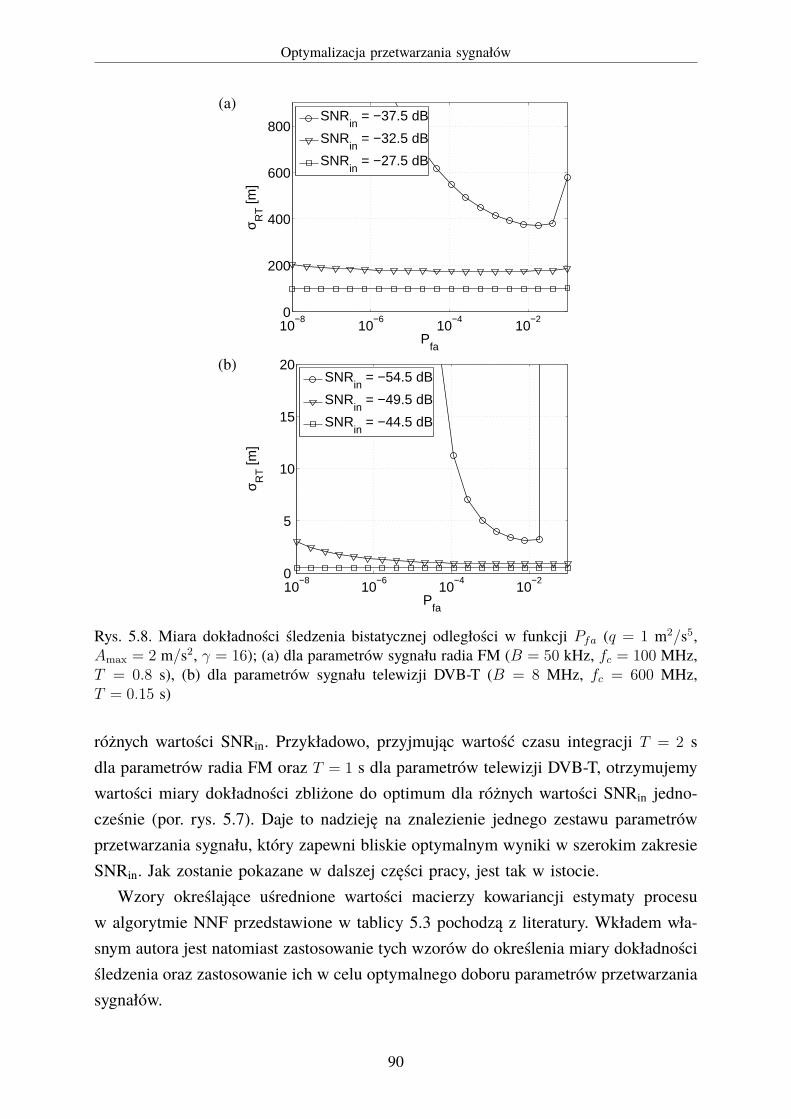
Optymalizacja przetwarzania sygnałów
(a)
10−8
10−6
10−4
10−20
200
400
600
800
Pfa
σ RT [m
]
SNRin
= −37.5 dB
SNRin
= −32.5 dB
SNRin
= −27.5 dB
(b)
10−8
10−6
10−4
10−2 0
5
10
15
20
Pfa
σ RT [m
]
SNRin
= −54.5 dB
SNRin
= −49.5 dB
SNRin
= −44.5 dB
Rys. 5.8. Miara dokładności śledzenia bistatycznej odległości w funkcji Pfa (q = 1 m2/s5,Amax = 2 m/s2, γ = 16); (a) dla parametrów sygnału radia FM (B = 50 kHz, fc = 100 MHz,T = 0.8 s), (b) dla parametrów sygnału telewizji DVB-T (B = 8 MHz, fc = 600 MHz,T = 0.15 s)
różnych wartości SNRin. Przykładowo, przyjmując wartość czasu integracji T = 2 sdla parametrów radia FM oraz T = 1 s dla parametrów telewizji DVB-T, otrzymujemywartości miary dokładności zbliżone do optimum dla różnych wartości SNRin jedno-cześnie (por. rys. 5.7). Daje to nadzieję na znalezienie jednego zestawu parametrówprzetwarzania sygnału, który zapewni bliskie optymalnym wyniki w szerokim zakresieSNRin. Jak zostanie pokazane w dalszej części pracy, jest tak w istocie.
Wzory określające uśrednione wartości macierzy kowariancji estymaty procesuw algorytmie NNF przedstawione w tablicy 5.3 pochodzą z literatury. Wkładem wła-snym autora jest natomiast zastosowanie tych wzorów do określenia miary dokładnościśledzenia oraz zastosowanie ich w celu optymalnego doboru parametrów przetwarzaniasygnałów.
90
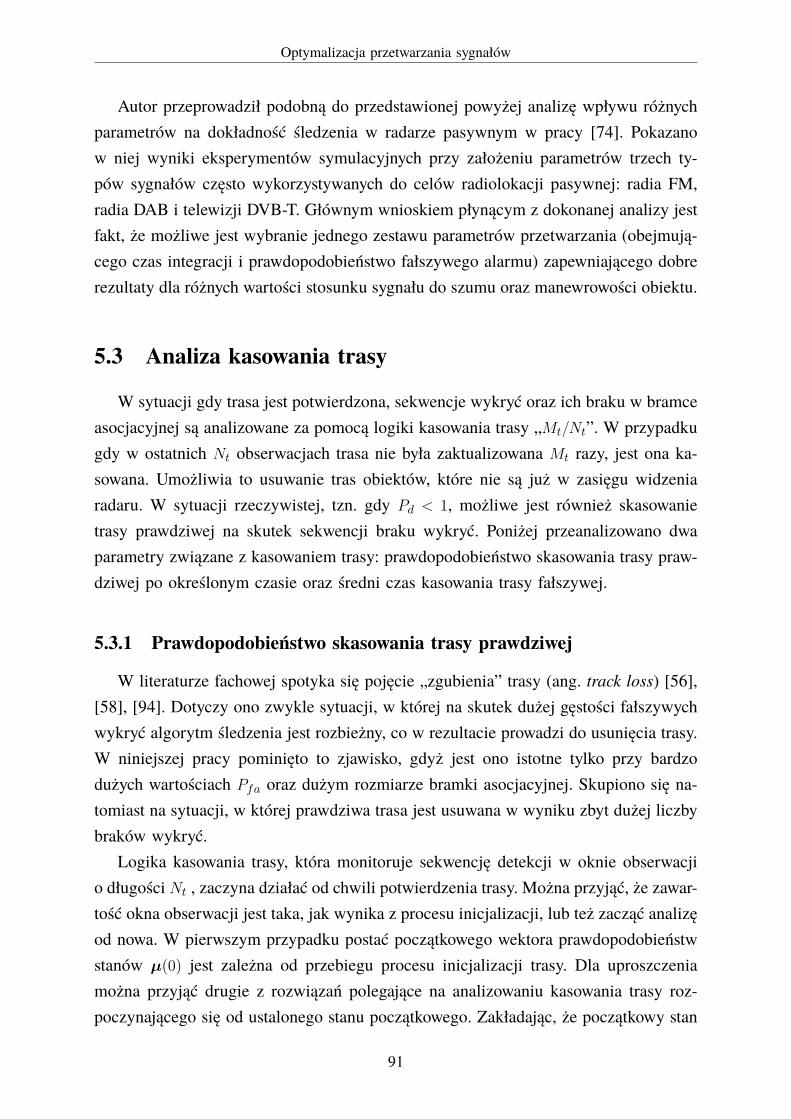
Optymalizacja przetwarzania sygnałów
Autor przeprowadził podobną do przedstawionej powyżej analizę wpływu różnychparametrów na dokładność śledzenia w radarze pasywnym w pracy [74]. Pokazanow niej wyniki eksperymentów symulacyjnych przy założeniu parametrów trzech ty-pów sygnałów często wykorzystywanych do celów radiolokacji pasywnej: radia FM,radia DAB i telewizji DVB-T. Głównym wnioskiem płynącym z dokonanej analizy jestfakt, że możliwe jest wybranie jednego zestawu parametrów przetwarzania (obejmują-cego czas integracji i prawdopodobieństwo fałszywego alarmu) zapewniającego dobrerezultaty dla różnych wartości stosunku sygnału do szumu oraz manewrowości obiektu.
5.3 Analiza kasowania trasy
W sytuacji gdy trasa jest potwierdzona, sekwencje wykryć oraz ich braku w bramceasocjacyjnej są analizowane za pomocą logiki kasowania trasy „Mt/Nt”. W przypadkugdy w ostatnich Nt obserwacjach trasa nie była zaktualizowana Mt razy, jest ona ka-sowana. Umożliwia to usuwanie tras obiektów, które nie są już w zasięgu widzeniaradaru. W sytuacji rzeczywistej, tzn. gdy Pd < 1, możliwe jest również skasowanietrasy prawdziwej na skutek sekwencji braku wykryć. Poniżej przeanalizowano dwaparametry związane z kasowaniem trasy: prawdopodobieństwo skasowania trasy praw-dziwej po określonym czasie oraz średni czas kasowania trasy fałszywej.
5.3.1 Prawdopodobieństwo skasowania trasy prawdziwej
W literaturze fachowej spotyka się pojęcie „zgubienia” trasy (ang. track loss) [56],[58], [94]. Dotyczy ono zwykle sytuacji, w której na skutek dużej gęstości fałszywychwykryć algorytm śledzenia jest rozbieżny, co w rezultacie prowadzi do usunięcia trasy.W niniejszej pracy pominięto to zjawisko, gdyż jest ono istotne tylko przy bardzodużych wartościach Pfa oraz dużym rozmiarze bramki asocjacyjnej. Skupiono się na-tomiast na sytuacji, w której prawdziwa trasa jest usuwana w wyniku zbyt dużej liczbybraków wykryć.
Logika kasowania trasy, która monitoruje sekwencję detekcji w oknie obserwacjio długości Nt , zaczyna działać od chwili potwierdzenia trasy. Można przyjąć, że zawar-tość okna obserwacji jest taka, jak wynika z procesu inicjalizacji, lub też zacząć analizęod nowa. W pierwszym przypadku postać początkowego wektora prawdopodobieństwstanów µ(0) jest zależna od przebiegu procesu inicjalizacji trasy. Dla uproszczeniamożna przyjąć drugie z rozwiązań polegające na analizowaniu kasowania trasy roz-poczynającego się od ustalonego stanu początkowego. Zakładając, że początkowy stan
91

Optymalizacja przetwarzania sygnałów
układu kasowania trasy ma postać Ss = {1, 1, . . . , 1}, otrzymuje się początkowy wektorprawdopodobieństw stanów postaci µ(0) = [1, 0, . . . , 0]. Stan kasowania trasy St odpo-wiada spełnieniu warunku „Mt/Nt”, tzn. brakowi Mt wykryć w Nt kolejnych obserwa-cjach. Prawdopodobieństwa przejścia między stanami określa się podobnie, jak przyanalizie średniego czasu inicjalizacji trasy prawdziwej: πd = PdPg i πnd = 1 − PdPg.Stan skasowania trasy jest absorbujący, więc prawdopodobieństwo πitit przejścia zestanu St do stanu St wynosi 1.
Prawdopodobieństwo skasowania prawdziwej trasy Ptl po czasie Ttr oblicza sięjako:
Ptl = µit(Ktr) , (5.22)
gdzie µit(k) jest prawdopodobieństwem osiągnięcia stanu skasowania trasy St po k kro-kach. W tabllicy 5.4 zgromadzono wzory służące do obliczania prawdopodobieństwaskasowania prawdziwej trasy po k obserwacjach.
πd = PdPg prawdopodobieństwo detekcji w bramce
πnd = 1− PdPg prawdopodobieństwo braku detekcji w bramce
πij = πd dla odpowiednich i oraz j
πij = πnd dla odpowiednich i oraz j
πitit = 1 stan skasowania trasy jest absorbujący
Π = [πij] macierz przejść
µ(0) = [1, 0, . . . , 0]′ początkowy wektor prawdopodobieństw stanów
µ(k) = (Π′)k µ(0) wektor prawdopodobieństw po k obserwacjach
Ptl = µit(Ktr) prawdopodobieństwo skasowania trasy prawdziwej po Ktr obserwacjach
Tablica 5.4. Algorytm wyznaczania prawdopodobieństwa skasowania trasy prawdziwej pookreślonym czasie
Na rysunku 5.9 przedstawiono przykładowe krzywe prawdopodobieństwa skasowa-nia trasy prawdziwej w funkcji czasu integracji T . Krzywe odpowiadają wartości Ptlpo czasie śledzenia Ttr = 30 s. W zależności od czasu integracji, liczba kroków Ktr
ulegała zmianie. Dla krótkich czasów integracji Ptl jest bliskie wartości 1, co wynikaz niskiego prawdopodobieństwa detekcji oraz dużej liczby kroków Ktr. Po przekro-czeniu określonej wartości T (zależnej od SNRin) prawdopodobieństwo skasowaniaprawdziwej trasy szybko maleje do zera.
92
Optymalizacja przetwarzania sygnałów
(a)
10−1
100
1010
0.2
0.4
0.6
0.8
1
T [s]
Ptl
SNRin
= −37.5 dB
SNRin
= −32.5 dB
SNRin
= −27.5 dB
(b)
10−1
1000
0.2
0.4
0.6
0.8
1
T [s]
Ptl
SNRin
= −54.5 dB
SNRin
= −49.5 dB
SNRin
= −44.5 dB
Rys. 5.9. Prawdopodobieństwo skasowania prawdziwej trasy w funkcji czasu integracji T(Mt = 4, Nt = 4, Pfa = 10−6); (a) dla parametrów sygnału radia FM (B = 50 kHz), (b) dlaparametrów sygnału telewizji DVB-T (B = 8 MHz)
5.3.2 Średni czas kasowania trasy fałszywej
Kasowanie trasy fałszywej może odnosić się do dwóch sytuacji: kasowania trasypowstałej wyłącznie w wyniku fałszywych wykryć oraz kasowania trasy prawdziwegoobiektu po jego wyjściu z obszaru obserwacji radaru. W obydwu przypadkach pożą-dane jest jak najszybsze skasowanie fałszywej trasy. W pracy skupiono się na drugiejsytuacji, co można uzasadnić następującym rozumowaniem. Z jednej strony układ śle-dzenia nie powinien „gubić” obiektu, gdy jest on w polu obserwacji radaru. Tegoaspektu dotyczył poprzedni punkt. Z drugiej strony, trasa odpowiadająca obiektowi,który zniknął z obszaru obserwacji radaru, nie powinna być utrzymywana przez zbytdługi czas, np. na skutek aktualizacji fałszywymi wykryciami. Mogłoby to prowadzićdo błędnych wniosków o zachowaniu się obiektu, który tak naprawdę nie jest jużobserwowany przez radar.
93

Optymalizacja przetwarzania sygnałów
Wielkość bramki VG(k) rozpatrywana przy badaniu czasu kasowania fałszywej trasy,podobnie jak w analizie częstości potwierdzania tras fałszywych, jest zależna od se-kwencji wykryć. Istnieje jednak pewna różnica między tymi dwoma przypadkami. Przyinicjalizacji trasy fałszywej analizę prowadzi się dla k = 1, . . . , Nc. W takiej sytuacjikażdemu stanowi Si jest jednoznacznie przypisana macierz kowariancji innowacji S(k)
uzależniona od sekwencji detekcji w oknie obserwacji o długości Nc, a więc rów-nież wielkość bramki VG(k). W przypadku obliczania średniego czasu kasowania trasyfałszywej analizę przeprowadza się dla k = 1, . . . ,∞. Może to doprowadzić do sytu-acji, w której ten sam stan Si będzie odpowiadał innej sekwencji wykryć. Wprawdziesekwencja w oknie o długości Nt będzie taka sama, ale wcześniejsza historia detek-cji może być inna. Aby dokonać dokładnej analizy, należałoby rozważyć wszystkiemożliwe sekwencje wykryć, które mogą po k krokach doprowadzić do stanu Si. Po-nieważ wszystkich możliwości jest 2k, jest to podejście niepraktyczne. Z tego powoduw pracy przyjęto upraszczające założenie, że wielkość bramki asocjacyjnej w danymstanie zależy tylko od sekwencji wykryć w oknie obserwacji o długości Nt. W roz-dziale poświęconym symulacjom pokazano, że stosowanie takiego uproszczenia jestw zupełności uzasadnione.
Za wartość początkową macierzy kowariancji wektora stanu w przypadku analizyśredniego czasu skasowania trasy fałszywej przyjmuje się P(Ktr|Ktr). Jest to uśred-niona macierz kowariancji po Ttr sekundach śledzenia obliczana na podstawie wzorówz tablicy 5.3. W poszczególnych stanach macierz kowariancji zmienia się zgodniez równaniami (5.9)–(5.12), w zależności od obecności lub braku wykrycia w bramceasocjacyjnej.
Podobnie jak w przypadku analizy kasowania trasy prawdziwej, przyjęte zostanie,że stanem początkowym jest Ss = {1, 1, . . . , 1}, a więc µ(0) = [1, 0, . . . , 0]. Prawdo-podobieństwa detekcji oraz jej braku wewnątrz bramki asocjacyjnej są obliczane jakoπd = 1− (1−Pfa)NG(k) oraz πnd = (1−Pfa)NG(k). Stan skasowania trasy St jest stanemabsorbującym, dlatego πitit = 1.
Średni czas kasowania trasy fałszywej można obliczyć w taki sam sposób jak w ini-cjalizacji trasy prawdziwej:
Ttrm = T∞∑k=1
kmit(k) . (5.23)
Algorytm opisujący sposób obliczania średniego czasu kasowania trasy prawdziwejprzedstawiono w tablicy 5.5.
94
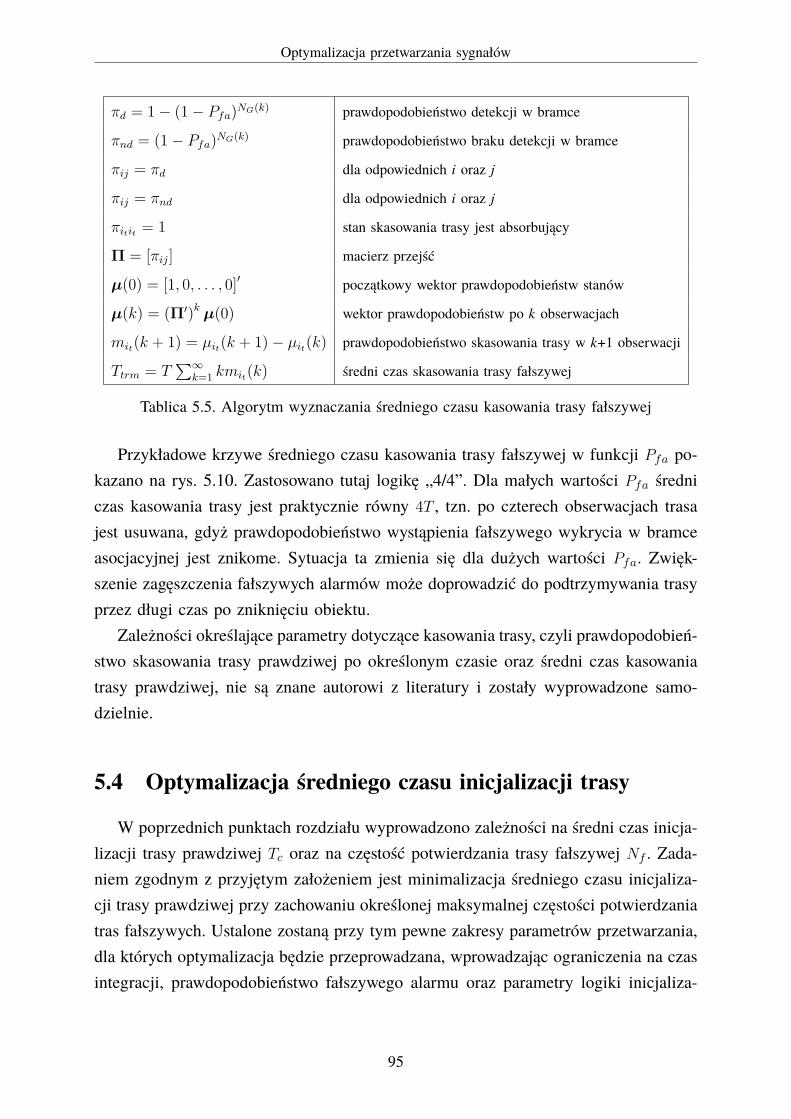
Optymalizacja przetwarzania sygnałów
πd = 1− (1− Pfa)NG(k) prawdopodobieństwo detekcji w bramce
πnd = (1− Pfa)NG(k) prawdopodobieństwo braku detekcji w bramce
πij = πd dla odpowiednich i oraz j
πij = πnd dla odpowiednich i oraz j
πitit = 1 stan skasowania trasy jest absorbujący
Π = [πij] macierz przejść
µ(0) = [1, 0, . . . , 0]′ początkowy wektor prawdopodobieństw stanów
µ(k) = (Π′)k µ(0) wektor prawdopodobieństw po k obserwacjach
mit(k + 1) = µit(k + 1)− µit(k) prawdopodobieństwo skasowania trasy w k+1 obserwacji
Ttrm = T∑∞
k=1 kmit(k) średni czas skasowania trasy fałszywej
Tablica 5.5. Algorytm wyznaczania średniego czasu kasowania trasy fałszywej
Przykładowe krzywe średniego czasu kasowania trasy fałszywej w funkcji Pfa po-kazano na rys. 5.10. Zastosowano tutaj logikę „4/4”. Dla małych wartości Pfa średniczas kasowania trasy jest praktycznie równy 4T , tzn. po czterech obserwacjach trasajest usuwana, gdyż prawdopodobieństwo wystąpienia fałszywego wykrycia w bramceasocjacyjnej jest znikome. Sytuacja ta zmienia się dla dużych wartości Pfa. Zwięk-szenie zagęszczenia fałszywych alarmów może doprowadzić do podtrzymywania trasyprzez długi czas po zniknięciu obiektu.
Zależności określające parametry dotyczące kasowania trasy, czyli prawdopodobień-stwo skasowania trasy prawdziwej po określonym czasie oraz średni czas kasowaniatrasy prawdziwej, nie są znane autorowi z literatury i zostały wyprowadzone samo-dzielnie.
5.4 Optymalizacja średniego czasu inicjalizacji trasy
W poprzednich punktach rozdziału wyprowadzono zależności na średni czas inicja-lizacji trasy prawdziwej Tc oraz na częstość potwierdzania trasy fałszywej Nf . Zada-niem zgodnym z przyjętym założeniem jest minimalizacja średniego czasu inicjaliza-cji trasy prawdziwej przy zachowaniu określonej maksymalnej częstości potwierdzaniatras fałszywych. Ustalone zostaną przy tym pewne zakresy parametrów przetwarzania,dla których optymalizacja będzie przeprowadzana, wprowadzając ograniczenia na czasintegracji, prawdopodobieństwo fałszywego alarmu oraz parametry logiki inicjaliza-
95
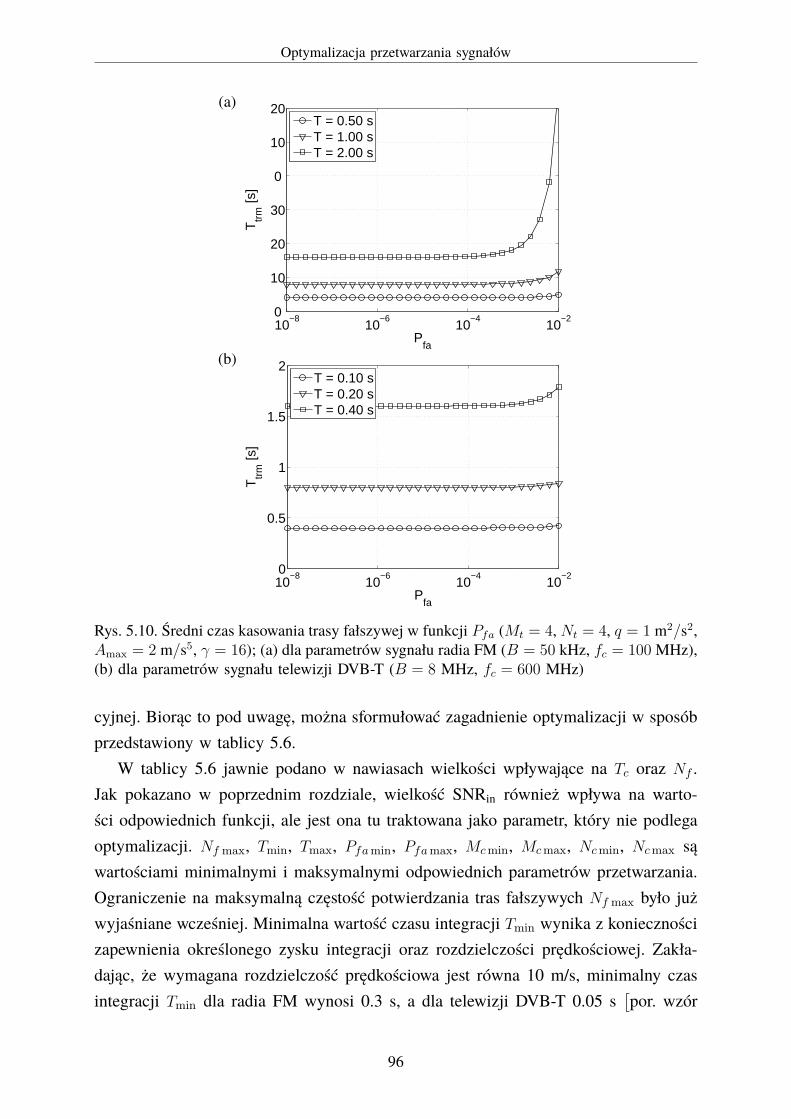
Optymalizacja przetwarzania sygnałów
(a)
10−8
10−6
10−4
10−2 0
10
20
30
0
10
20
Pfa
Ttr
m [s
]
T = 0.50 sT = 1.00 sT = 2.00 s
(b)
10−8
10−6
10−4
10−20
0.5
1
1.5
2
Pfa
Ttr
m [s
]
T = 0.10 sT = 0.20 sT = 0.40 s
Rys. 5.10. Średni czas kasowania trasy fałszywej w funkcji Pfa (Mt = 4, Nt = 4, q = 1 m2/s2,Amax = 2 m/s5, γ = 16); (a) dla parametrów sygnału radia FM (B = 50 kHz, fc = 100 MHz),(b) dla parametrów sygnału telewizji DVB-T (B = 8 MHz, fc = 600 MHz)
cyjnej. Biorąc to pod uwagę, można sformułować zagadnienie optymalizacji w sposóbprzedstawiony w tablicy 5.6.
W tablicy 5.6 jawnie podano w nawiasach wielkości wpływające na Tc oraz Nf .Jak pokazano w poprzednim rozdziale, wielkość SNRin również wpływa na warto-ści odpowiednich funkcji, ale jest ona tu traktowana jako parametr, który nie podlegaoptymalizacji. Nf max, Tmin, Tmax, Pfamin, Pfamax, Mcmin, Mcmax, Ncmin, Ncmax sąwartościami minimalnymi i maksymalnymi odpowiednich parametrów przetwarzania.Ograniczenie na maksymalną częstość potwierdzania tras fałszywych Nf max było jużwyjaśniane wcześniej. Minimalna wartość czasu integracji Tmin wynika z koniecznościzapewnienia określonego zysku integracji oraz rozdzielczości prędkościowej. Zakła-dając, że wymagana rozdzielczość prędkościowa jest równa 10 m/s, minimalny czasintegracji Tmin dla radia FM wynosi 0.3 s, a dla telewizji DVB-T 0.05 s
[por. wzór
96
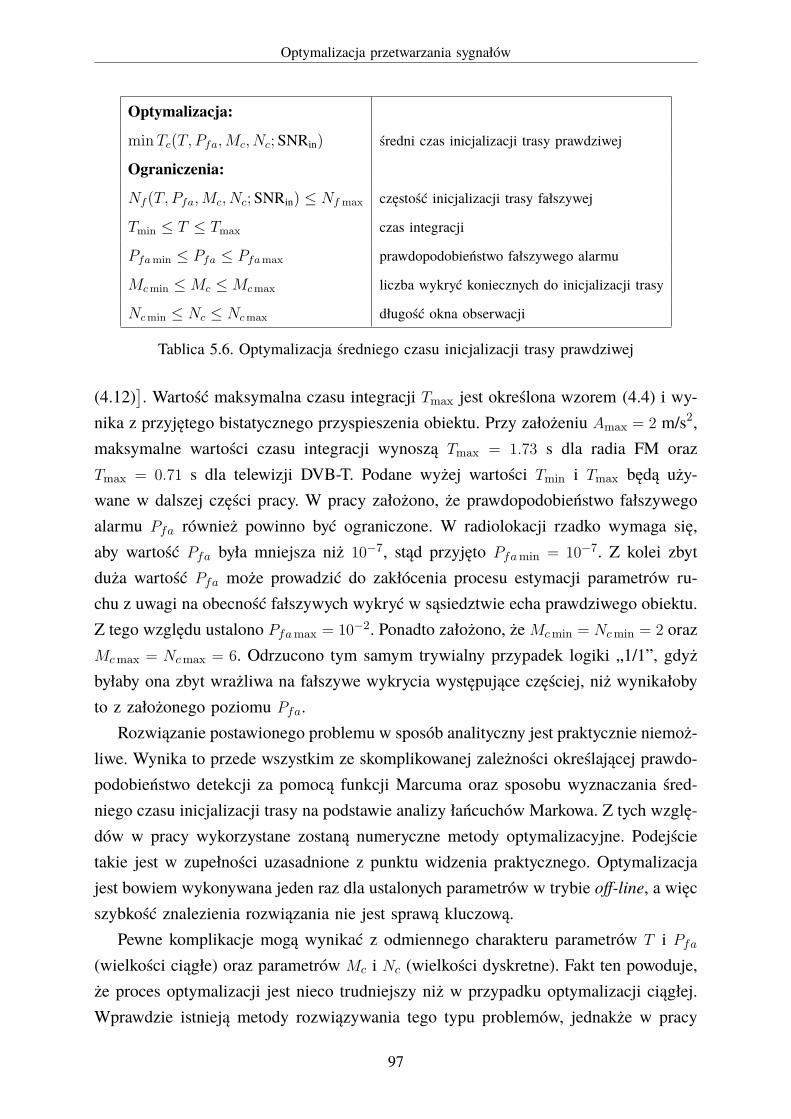
Optymalizacja przetwarzania sygnałów
Optymalizacja:
minTc(T, Pfa,Mc, Nc; SNRin) średni czas inicjalizacji trasy prawdziwej
Ograniczenia:
Nf (T, Pfa,Mc, Nc; SNRin) ≤ Nf max częstość inicjalizacji trasy fałszywej
Tmin ≤ T ≤ Tmax czas integracji
Pfamin ≤ Pfa ≤ Pfamax prawdopodobieństwo fałszywego alarmu
Mcmin ≤Mc ≤Mcmax liczba wykryć koniecznych do inicjalizacji trasy
Ncmin ≤ Nc ≤ Ncmax długość okna obserwacji
Tablica 5.6. Optymalizacja średniego czasu inicjalizacji trasy prawdziwej
(4.12)]. Wartość maksymalna czasu integracji Tmax jest określona wzorem (4.4) i wy-
nika z przyjętego bistatycznego przyspieszenia obiektu. Przy założeniu Amax = 2 m/s2,maksymalne wartości czasu integracji wynoszą Tmax = 1.73 s dla radia FM orazTmax = 0.71 s dla telewizji DVB-T. Podane wyżej wartości Tmin i Tmax będą uży-wane w dalszej części pracy. W pracy założono, że prawdopodobieństwo fałszywegoalarmu Pfa również powinno być ograniczone. W radiolokacji rzadko wymaga się,aby wartość Pfa była mniejsza niż 10−7, stąd przyjęto Pfamin = 10−7. Z kolei zbytduża wartość Pfa może prowadzić do zakłócenia procesu estymacji parametrów ru-chu z uwagi na obecność fałszywych wykryć w sąsiedztwie echa prawdziwego obiektu.Z tego względu ustalono Pfamax = 10−2. Ponadto założono, że Mcmin = Ncmin = 2 orazMcmax = Ncmax = 6. Odrzucono tym samym trywialny przypadek logiki „1/1”, gdyżbyłaby ona zbyt wrażliwa na fałszywe wykrycia występujące częściej, niż wynikałobyto z założonego poziomu Pfa.
Rozwiązanie postawionego problemu w sposób analityczny jest praktycznie niemoż-liwe. Wynika to przede wszystkim ze skomplikowanej zależności określającej prawdo-podobieństwo detekcji za pomocą funkcji Marcuma oraz sposobu wyznaczania śred-niego czasu inicjalizacji trasy na podstawie analizy łańcuchów Markowa. Z tych wzglę-dów w pracy wykorzystane zostaną numeryczne metody optymalizacyjne. Podejścietakie jest w zupełności uzasadnione z punktu widzenia praktycznego. Optymalizacjajest bowiem wykonywana jeden raz dla ustalonych parametrów w trybie off-line, a więcszybkość znalezienia rozwiązania nie jest sprawą kluczową.
Pewne komplikacje mogą wynikać z odmiennego charakteru parametrów T i Pfa(wielkości ciągłe) oraz parametrów Mc i Nc (wielkości dyskretne). Fakt ten powoduje,że proces optymalizacji jest nieco trudniejszy niż w przypadku optymalizacji ciągłej.Wprawdzie istnieją metody rozwiązywania tego typu problemów, jednakże w pracy
97
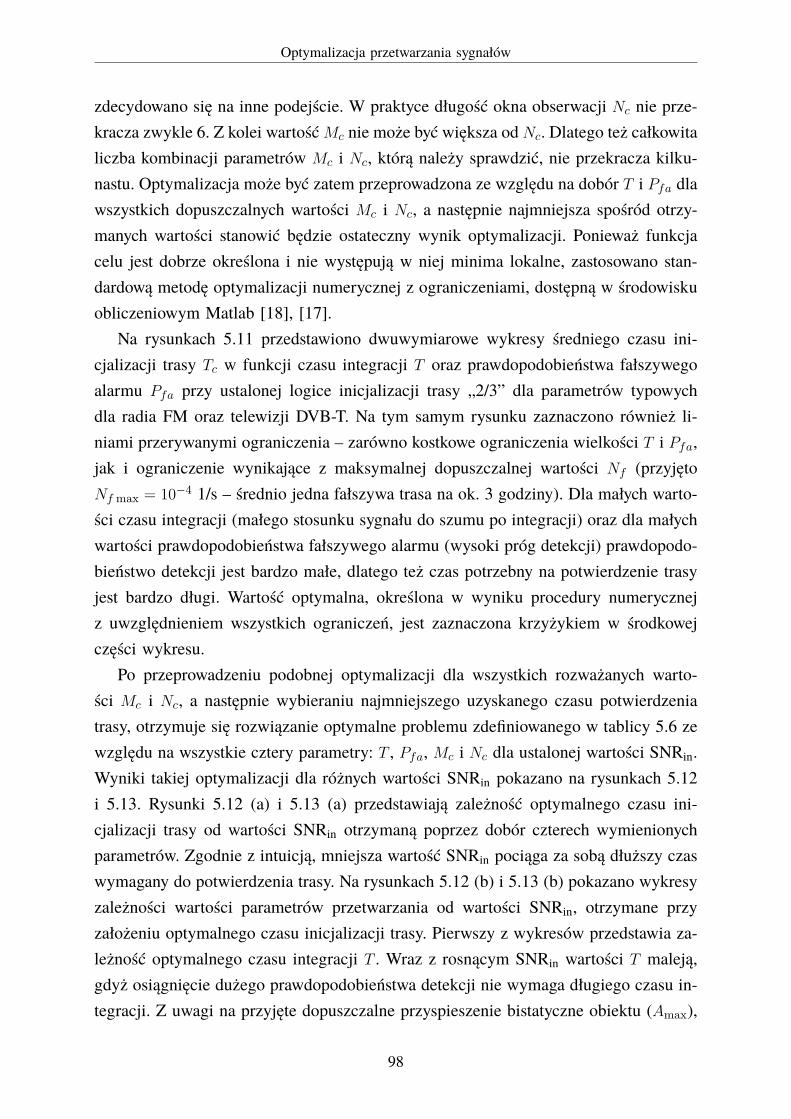
Optymalizacja przetwarzania sygnałów
zdecydowano się na inne podejście. W praktyce długość okna obserwacji Nc nie prze-kracza zwykle 6. Z kolei wartość Mc nie może być większa od Nc. Dlatego też całkowitaliczba kombinacji parametrów Mc i Nc, którą należy sprawdzić, nie przekracza kilku-nastu. Optymalizacja może być zatem przeprowadzona ze względu na dobór T i Pfa dlawszystkich dopuszczalnych wartości Mc i Nc, a następnie najmniejsza spośród otrzy-manych wartości stanowić będzie ostateczny wynik optymalizacji. Ponieważ funkcjacelu jest dobrze określona i nie występują w niej minima lokalne, zastosowano stan-dardową metodę optymalizacji numerycznej z ograniczeniami, dostępną w środowiskuobliczeniowym Matlab [18], [17].
Na rysunkach 5.11 przedstawiono dwuwymiarowe wykresy średniego czasu ini-cjalizacji trasy Tc w funkcji czasu integracji T oraz prawdopodobieństwa fałszywegoalarmu Pfa przy ustalonej logice inicjalizacji trasy „2/3” dla parametrów typowychdla radia FM oraz telewizji DVB-T. Na tym samym rysunku zaznaczono również li-niami przerywanymi ograniczenia – zarówno kostkowe ograniczenia wielkości T i Pfa,jak i ograniczenie wynikające z maksymalnej dopuszczalnej wartości Nf (przyjętoNf max = 10−4 1/s – średnio jedna fałszywa trasa na ok. 3 godziny). Dla małych warto-ści czasu integracji (małego stosunku sygnału do szumu po integracji) oraz dla małychwartości prawdopodobieństwa fałszywego alarmu (wysoki próg detekcji) prawdopodo-bieństwo detekcji jest bardzo małe, dlatego też czas potrzebny na potwierdzenie trasyjest bardzo długi. Wartość optymalna, określona w wyniku procedury numerycznejz uwzględnieniem wszystkich ograniczeń, jest zaznaczona krzyżykiem w środkowejczęści wykresu.
Po przeprowadzeniu podobnej optymalizacji dla wszystkich rozważanych warto-ści Mc i Nc, a następnie wybieraniu najmniejszego uzyskanego czasu potwierdzeniatrasy, otrzymuje się rozwiązanie optymalne problemu zdefiniowanego w tablicy 5.6 zewzględu na wszystkie cztery parametry: T , Pfa, Mc i Nc dla ustalonej wartości SNRin.Wyniki takiej optymalizacji dla różnych wartości SNRin pokazano na rysunkach 5.12i 5.13. Rysunki 5.12 (a) i 5.13 (a) przedstawiają zależność optymalnego czasu ini-cjalizacji trasy od wartości SNRin otrzymaną poprzez dobór czterech wymienionychparametrów. Zgodnie z intuicją, mniejsza wartość SNRin pociąga za sobą dłuższy czaswymagany do potwierdzenia trasy. Na rysunkach 5.12 (b) i 5.13 (b) pokazano wykresyzależności wartości parametrów przetwarzania od wartości SNRin, otrzymane przyzałożeniu optymalnego czasu inicjalizacji trasy. Pierwszy z wykresów przedstawia za-leżność optymalnego czasu integracji T . Wraz z rosnącym SNRin wartości T maleją,gdyż osiągnięcie dużego prawdopodobieństwa detekcji nie wymaga długiego czasu in-tegracji. Z uwagi na przyjęte dopuszczalne przyspieszenie bistatyczne obiektu (Amax),
98
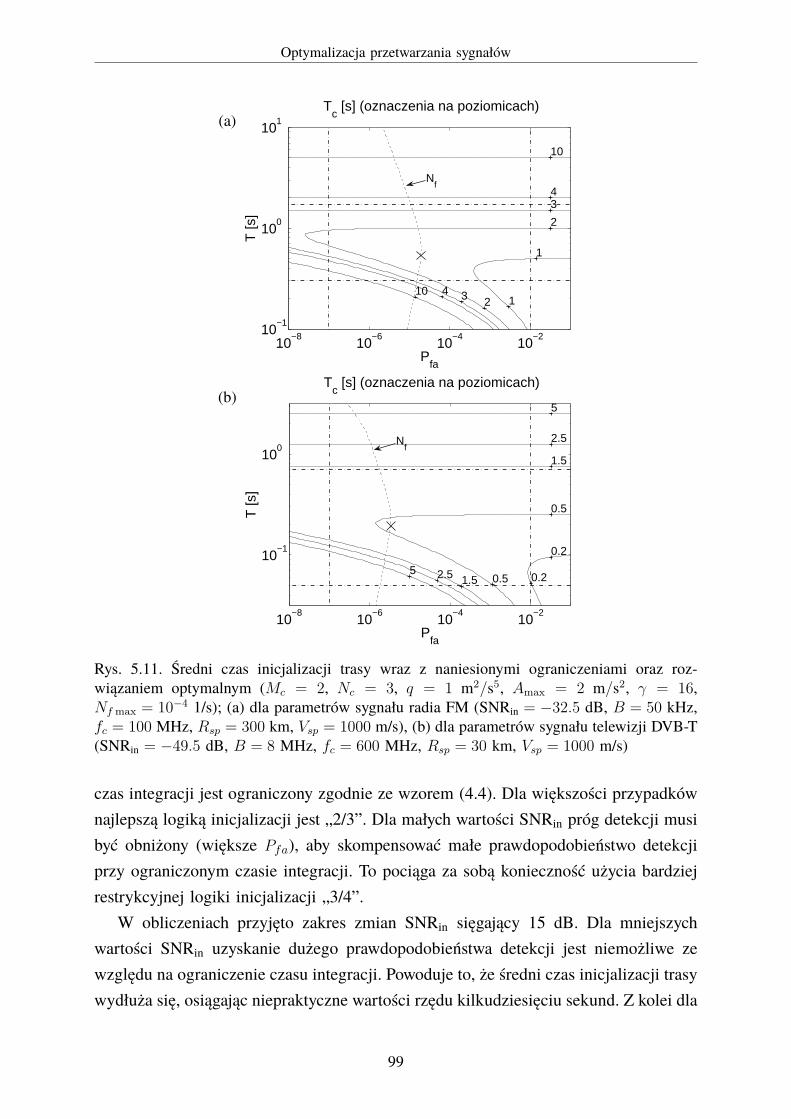
Optymalizacja przetwarzania sygnałów
(a)
Pfa
T [s
]1
1
2
34
10
23410
Tc [s] (oznaczenia na poziomicach)
10−8
10−6
10−4
10−210
−1
100
101
Nf
(b)
Pfa
T [s
]
5
2.5
1.5
0.5
0.2
0.20.51.52.55
Tc [s] (oznaczenia na poziomicach)
10−8
10−6
10−4
10−2
10−1
100
Nf
Rys. 5.11. Średni czas inicjalizacji trasy wraz z naniesionymi ograniczeniami oraz roz-wiązaniem optymalnym (Mc = 2, Nc = 3, q = 1 m2/s5, Amax = 2 m/s2, γ = 16,Nf max = 10−4 1/s); (a) dla parametrów sygnału radia FM (SNRin = −32.5 dB, B = 50 kHz,fc = 100 MHz, Rsp = 300 km, Vsp = 1000 m/s), (b) dla parametrów sygnału telewizji DVB-T(SNRin = −49.5 dB, B = 8 MHz, fc = 600 MHz, Rsp = 30 km, Vsp = 1000 m/s)
czas integracji jest ograniczony zgodnie ze wzorem (4.4). Dla większości przypadkównajlepszą logiką inicjalizacji jest „2/3”. Dla małych wartości SNRin próg detekcji musibyć obniżony (większe Pfa), aby skompensować małe prawdopodobieństwo detekcjiprzy ograniczonym czasie integracji. To pociąga za sobą konieczność użycia bardziejrestrykcyjnej logiki inicjalizacji „3/4”.
W obliczeniach przyjęto zakres zmian SNRin sięgający 15 dB. Dla mniejszychwartości SNRin uzyskanie dużego prawdopodobieństwa detekcji jest niemożliwe zewzględu na ograniczenie czasu integracji. Powoduje to, że średni czas inicjalizacji trasywydłuża się, osiągając niepraktyczne wartości rzędu kilkudziesięciu sekund. Z kolei dla
99
Optymalizacja przetwarzania sygnałów
(a)
−40 −35 −30 −250
5
10
15
SNRin
[dB]
Tc [s
]
(b)
−40 −35 −30 −250
1
2
T [s
]
−40 −35 −30 −2510
−6
10−4
Pfa
−40 −35 −30 −250
2
4
Logi
kain
icja
lizac
ji
SNRin
[dB]
Mc
Nc
Rys. 5.12. Zoptymalizowany średni czas potwierdzenia trasy prawdziwej w funkcji SNRin(a) oraz odpowiadające parametry przetwarzania (b) dla parametrów sygnału radia FM(q = 1 m2/s5, Amax = 2 m/s2, γ = 16, Nf max = 10−4 1/s, B = 50 kHz, fc = 100 MHz,Rsp = 300 km, Vsp = 1000 m/s)
wartości SNRin większych niż z przyjętego przedziału prawdopodobieństwo detekcjijest duże nawet dla krótkich czasów integracji i wiarygodnego potwierdzenia trasymożna dokonać bardzo szybko, dlatego też optymalizacja nie jest potrzebna.
Przeprowadzona dotychczas analiza wskazuje, że wyniki optymalizacji średniegoczasu inicjalizacji trasy są zależne od SNRin. W praktyce radar obserwuje obiektyo różnej sile echa równocześnie, co sugerowałoby zastosowanie różnych parametrów
100
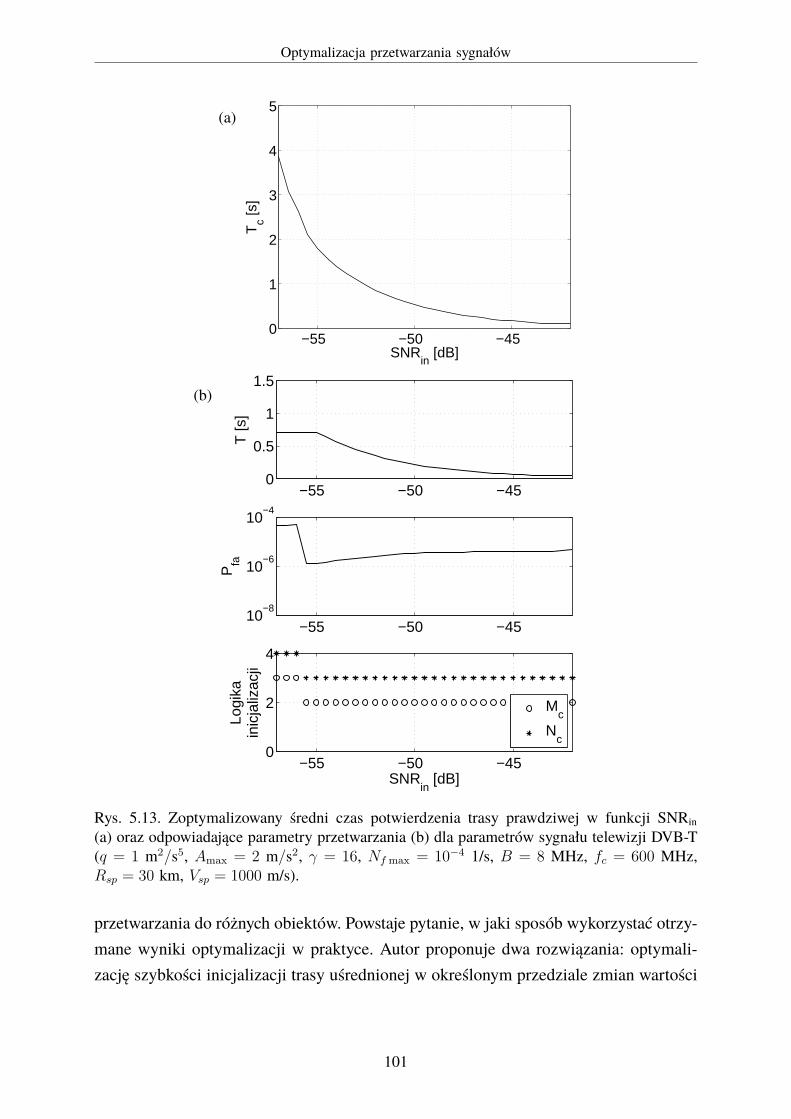
Optymalizacja przetwarzania sygnałów
(a)
−55 −50 −450
1
2
3
4
5
SNRin
[dB]
Tc [s
]
(b)
−55 −50 −450
0.5
1
1.5
T [s
]
−55 −50 −4510
−8
10−6
10−4
Pfa
−55 −50 −450
2
4
Logi
kain
icja
lizac
ji
SNRin
[dB]
Mc
Nc
Rys. 5.13. Zoptymalizowany średni czas potwierdzenia trasy prawdziwej w funkcji SNRin(a) oraz odpowiadające parametry przetwarzania (b) dla parametrów sygnału telewizji DVB-T(q = 1 m2/s5, Amax = 2 m/s2, γ = 16, Nf max = 10−4 1/s, B = 8 MHz, fc = 600 MHz,Rsp = 30 km, Vsp = 1000 m/s).
przetwarzania do różnych obiektów. Powstaje pytanie, w jaki sposób wykorzystać otrzy-mane wyniki optymalizacji w praktyce. Autor proponuje dwa rozwiązania: optymali-zację szybkości inicjalizacji trasy uśrednionej w określonym przedziale zmian wartości
101

Optymalizacja przetwarzania sygnałów
SNRin oraz zastosowanie równoległej struktury układu inicjalizacji. Oba te rozwiązaniaopisano poniżej.
5.4.1 Optymalizacja czasu inicjalizacji trasy uśrednionego w przedziale
zmian SNRin
Postawione zagadnienie optymalizacji można zmodyfikować w taki sposób, żebyłatwiej było wykorzystać otrzymane wyniki w praktyce. Pożądanym rozwiązaniem by-łoby wyznaczenie jednego zestawu parametrów przetwarzania sygnałów, korzystnegodla różnych wartości SNRin. Problem optymalizacji można zatem zdefiniować w od-niesieniu do wartości Tc uśrednionej w pewnym zakresie 〈SNRin min,SNRin max〉:
T avgc (T, Pfa,Mc, Nc) =
=1
SNRin max − SNRin min
∫ SNRin max
SNRin min
Tc(T, Pfa,Mc, Nc; SNRin)dSNRin. (5.24)
Ograniczenie częstości inicjalizowanych fałszywych tras jest modyfikowane tak, abyw najgorszym przypadku z analizowanego przedziału wartości SNRin było ono speł-nione:
Nmodf = max
SNRinNf (T, Pfa,Mc, Nc; SNRin) ≤ Nf max . (5.25)
Nowe zadanie optymalizacji, zdefiniowane w średnim sensie dla przedziału zmianstosunku sygnału do szumu
⟨SNRin min, SNRin max
⟩, sformułowano w tablicy 5.7.
Optymalizacja:
minT avgc (T, Pfa,Mc, Nc) średni czas inicjalizacji trasy prawdziwej (zmodyfikowany)
Ograniczenia:
Nmodf (T, Pfa,Mc, Nc) ≤ Nf max częstość inicjalizacji trasy fałszywej (zmodyfikowana)
Tmin ≤ T ≤ Tmax czas integracji
Pfamin ≤ Pfa ≤ Pfamax prawdopodobieństwo fałszywego alarmu
Mcmin ≤Mc ≤Mcmax liczba wykryć koniecznych do inicjalizacji trasy
Ncmin ≤ Nc ≤ Ncmax długość okna obserwacji
Tablica 5.7. Zmodyfikowana optymalizacja średniego czasu inicjalizacji trasy
W praktyce całkowanie w przedziale⟨SNRin min, SNRin max
⟩można zastąpić sumą
skończonej liczby wartości z tego przedziału. Podobnie można postąpić w przypadku
102
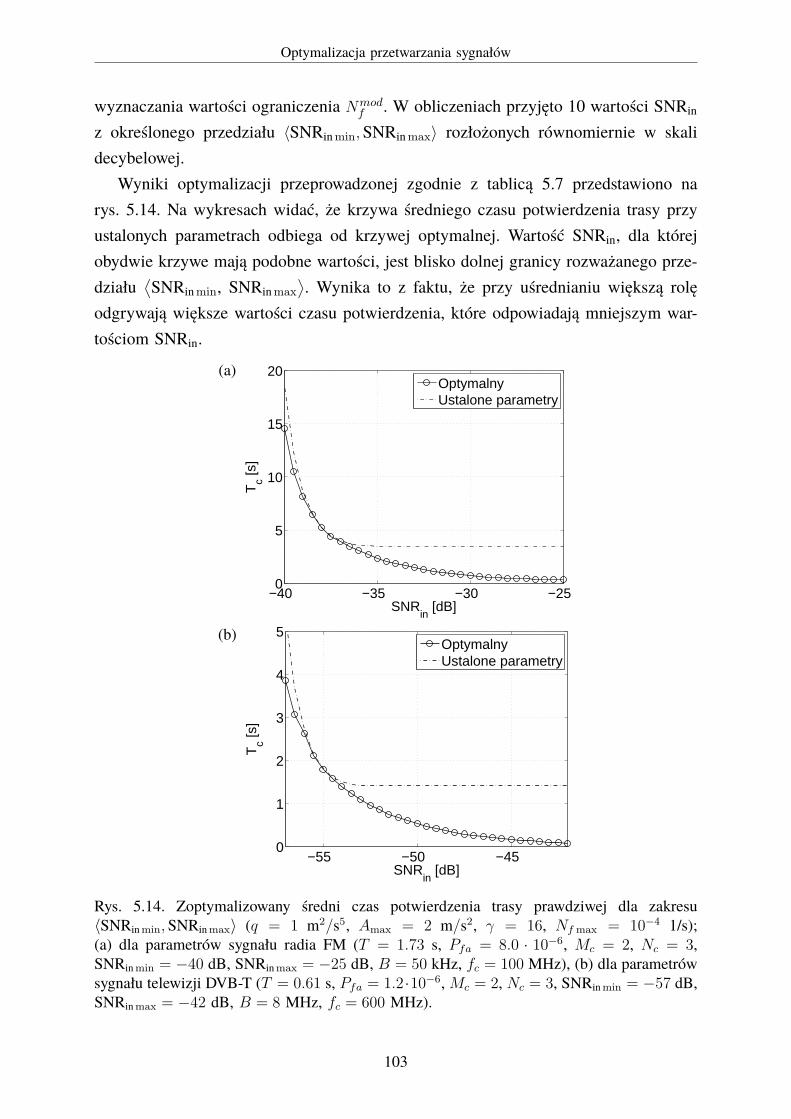
Optymalizacja przetwarzania sygnałów
wyznaczania wartości ograniczenia Nmodf . W obliczeniach przyjęto 10 wartości SNRin
z określonego przedziału 〈SNRin min,SNRin max〉 rozłożonych równomiernie w skalidecybelowej.
Wyniki optymalizacji przeprowadzonej zgodnie z tablicą 5.7 przedstawiono narys. 5.14. Na wykresach widać, że krzywa średniego czasu potwierdzenia trasy przyustalonych parametrach odbiega od krzywej optymalnej. Wartość SNRin, dla którejobydwie krzywe mają podobne wartości, jest blisko dolnej granicy rozważanego prze-działu
⟨SNRin min, SNRin max
⟩. Wynika to z faktu, że przy uśrednianiu większą rolę
odgrywają większe wartości czasu potwierdzenia, które odpowiadają mniejszym war-tościom SNRin.
(a)
−40 −35 −30 −250
5
10
15
20
SNRin
[dB]
Tc [s
]
OptymalnyUstalone parametry
(b)
−55 −50 −45 0
1
2
3
4
5
SNRin
[dB]
Tc [s
]
OptymalnyUstalone parametry
Rys. 5.14. Zoptymalizowany średni czas potwierdzenia trasy prawdziwej dla zakresu〈SNRin min,SNRin max〉 (q = 1 m2/s5, Amax = 2 m/s2, γ = 16, Nf max = 10−4 1/s);(a) dla parametrów sygnału radia FM (T = 1.73 s, Pfa = 8.0 · 10−6, Mc = 2, Nc = 3,SNRin min = −40 dB, SNRin max = −25 dB, B = 50 kHz, fc = 100 MHz), (b) dla parametrówsygnału telewizji DVB-T (T = 0.61 s, Pfa = 1.2·10−6, Mc = 2, Nc = 3, SNRin min = −57 dB,SNRin max = −42 dB, B = 8 MHz, fc = 600 MHz).
103

Optymalizacja przetwarzania sygnałów
5.4.2 Równoległa struktura układu inicjalizacji tras
Jak pokazano, zastosowanie jednego zestawu parametrów przetwarzania prowadzido rezultatów odbiegających od optimum. Jeśli takie rozwiązanie jest dla projektantasystemu nieakceptowalne, można zastosować odmienne podejście. Sygnał odebranymoże być przetwarzany w Kb równoległych gałęziach, przy czym każda z gałęzi prze-twarza sygnał przy założeniu innych parametrów, dopasowanych do ustalonej warto-ści SNRin. Ostateczny rezultat uzyskuje się przez połączenie wyników (fuzję tras)uzyskanych dla poszczególnych torów przetwarzania. Na rysunku 5.15 przedstawionoprzykładową strukturę równoległą złożoną z trzech gałęzi.
parametry optymalnedla SNRin1
fuzj
a tr
as
parametry optymalnedla SNRin2
parametry optymalnedla SNRin3
Rys. 5.15. Przykładowa równoległa struktura układu inicjalizacji tras o trzech gałęziach
Parametry przetwarzania sygnału dla każdej z gałęzi otrzymuje się w wyniku pro-cesu optymalizacji dla ustalonych wartości SNRin. Należy tutaj jednak zwrócić uwagęna fakt, że ostateczny rezultat powstaje przez fuzję tras z Kb gałęzi. Jeżeli w każdejgałęzi częstość inicjalizacji tras fałszywych wynosi Nf max, to na skutek połączeniawyników z Kb gałęzi częstość potwierdzania tras fałszywych wzrośnie do KbNf max
4.Problem ten można rozwiązać, modyfikując ograniczenia stosowane podczas optyma-lizacji. Wiedząc, że wykorzystywane będzie Kb gałęzi, ograniczenie na maksymalnączęstość inicjalizacji tras fałszywych można ustalić na poziomie Nf max/Kb w każ-dej z gałęzi. Możliwe jest również nierównomierne rozłożenie częstości inicjalizacjifałszywych tras między równoległe gałęzie, np. gałęziom odpowiadającym niskim war-
4 Założenie, że częstość potwierdzania tras fałszywych wzrośnie Kb-krotnie jest założeniem pesymistycznym,prawdziwym w przypadku niezależności inicjalizacji trasy fałszywej w każdej z gałęzi. W rzeczywistości każdaz gałęzi przetwarza ten sam sygnał, więc inicjalizacja fałszywych tras będzie zależna. W rezultacie układ fuzjitras połączy fałszywe trasy pochodzące z różnych gałęzi, przez co sumaryczna częstość potwierdzania fałszywychtras będzie mniejsza niż KbNf max.
104
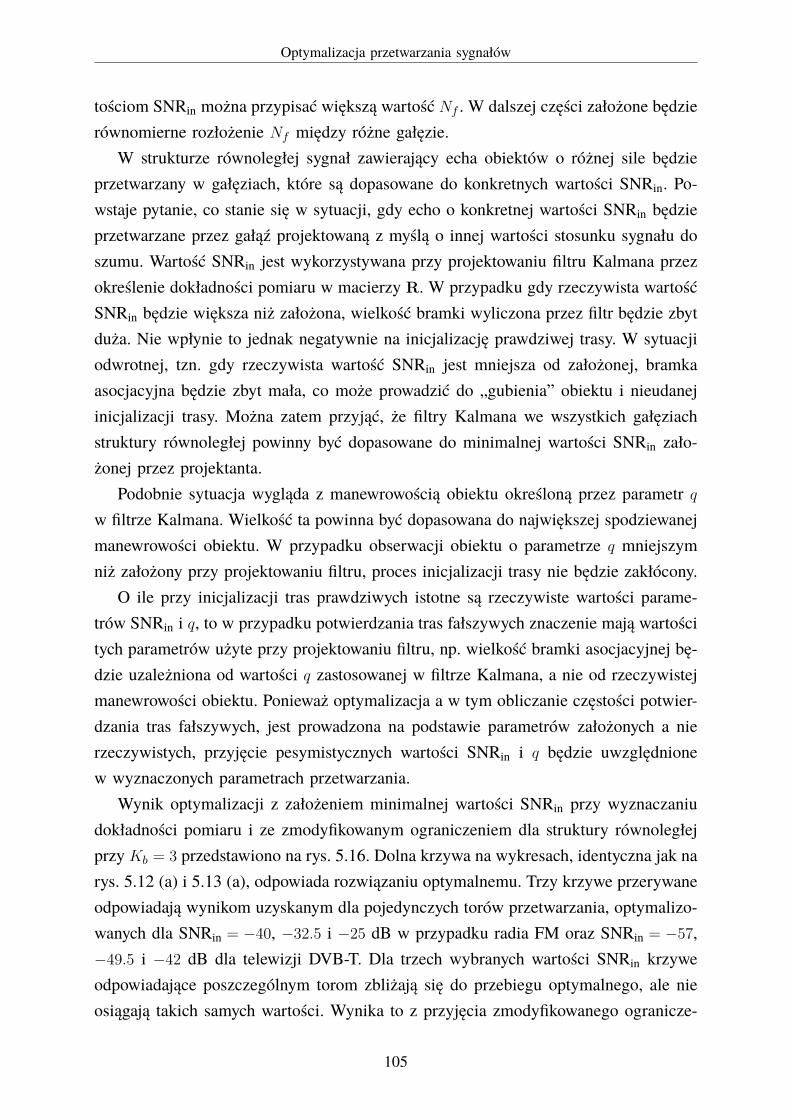
Optymalizacja przetwarzania sygnałów
tościom SNRin można przypisać większą wartość Nf . W dalszej części założone będzierównomierne rozłożenie Nf między różne gałęzie.
W strukturze równoległej sygnał zawierający echa obiektów o różnej sile będzieprzetwarzany w gałęziach, które są dopasowane do konkretnych wartości SNRin. Po-wstaje pytanie, co stanie się w sytuacji, gdy echo o konkretnej wartości SNRin będzieprzetwarzane przez gałąź projektowaną z myślą o innej wartości stosunku sygnału doszumu. Wartość SNRin jest wykorzystywana przy projektowaniu filtru Kalmana przezokreślenie dokładności pomiaru w macierzy R. W przypadku gdy rzeczywista wartośćSNRin będzie większa niż założona, wielkość bramki wyliczona przez filtr będzie zbytduża. Nie wpłynie to jednak negatywnie na inicjalizację prawdziwej trasy. W sytuacjiodwrotnej, tzn. gdy rzeczywista wartość SNRin jest mniejsza od założonej, bramkaasocjacyjna będzie zbyt mała, co może prowadzić do „gubienia” obiektu i nieudanejinicjalizacji trasy. Można zatem przyjąć, że filtry Kalmana we wszystkich gałęziachstruktury równoległej powinny być dopasowane do minimalnej wartości SNRin zało-żonej przez projektanta.
Podobnie sytuacja wygląda z manewrowością obiektu określoną przez parametr qw filtrze Kalmana. Wielkość ta powinna być dopasowana do największej spodziewanejmanewrowości obiektu. W przypadku obserwacji obiektu o parametrze q mniejszymniż założony przy projektowaniu filtru, proces inicjalizacji trasy nie będzie zakłócony.
O ile przy inicjalizacji tras prawdziwych istotne są rzeczywiste wartości parame-trów SNRin i q, to w przypadku potwierdzania tras fałszywych znaczenie mają wartościtych parametrów użyte przy projektowaniu filtru, np. wielkość bramki asocjacyjnej bę-dzie uzależniona od wartości q zastosowanej w filtrze Kalmana, a nie od rzeczywistejmanewrowości obiektu. Ponieważ optymalizacja a w tym obliczanie częstości potwier-dzania tras fałszywych, jest prowadzona na podstawie parametrów założonych a nierzeczywistych, przyjęcie pesymistycznych wartości SNRin i q będzie uwzględnionew wyznaczonych parametrach przetwarzania.
Wynik optymalizacji z założeniem minimalnej wartości SNRin przy wyznaczaniudokładności pomiaru i ze zmodyfikowanym ograniczeniem dla struktury równoległejprzy Kb = 3 przedstawiono na rys. 5.16. Dolna krzywa na wykresach, identyczna jak narys. 5.12 (a) i 5.13 (a), odpowiada rozwiązaniu optymalnemu. Trzy krzywe przerywaneodpowiadają wynikom uzyskanym dla pojedynczych torów przetwarzania, optymalizo-wanych dla SNRin = −40, −32.5 i −25 dB w przypadku radia FM oraz SNRin = −57,−49.5 i −42 dB dla telewizji DVB-T. Dla trzech wybranych wartości SNRin krzyweodpowiadające poszczególnym torom zbliżają się do przebiegu optymalnego, ale nieosiągają takich samych wartości. Wynika to z przyjęcia zmodyfikowanego ogranicze-
105
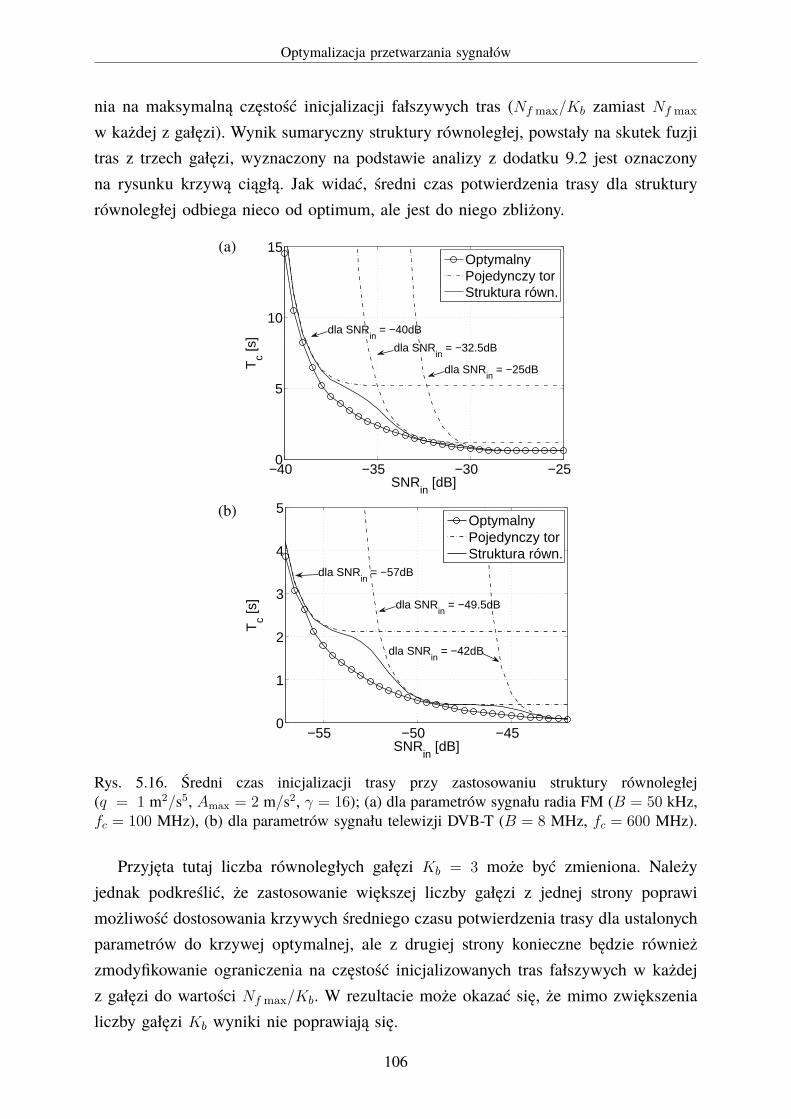
Optymalizacja przetwarzania sygnałów
nia na maksymalną częstość inicjalizacji fałszywych tras (Nf max/Kb zamiast Nf max
w każdej z gałęzi). Wynik sumaryczny struktury równoległej, powstały na skutek fuzjitras z trzech gałęzi, wyznaczony na podstawie analizy z dodatku 9.2 jest oznaczonyna rysunku krzywą ciągłą. Jak widać, średni czas potwierdzenia trasy dla strukturyrównoległej odbiega nieco od optimum, ale jest do niego zbliżony.
(a)
−40 −35 −30 −250
5
10
15
SNRin
[dB]
Tc [s
]
OptymalnyPojedynczy torStruktura równ.
dla SNRin
= −40dB
dla SNRin
= −32.5dB
dla SNRin
= −25dB
(b)
−55 −50 −45 0
1
2
3
4
5
SNRin
[dB]
Tc [s
]
OptymalnyPojedynczy torStruktura równ.
dla SNRin
= −57dB
dla SNRin
= −49.5dB
dla SNRin
= −42dB
Rys. 5.16. Średni czas inicjalizacji trasy przy zastosowaniu struktury równoległej(q = 1 m2/s5, Amax = 2 m/s2, γ = 16); (a) dla parametrów sygnału radia FM (B = 50 kHz,fc = 100 MHz), (b) dla parametrów sygnału telewizji DVB-T (B = 8 MHz, fc = 600 MHz).
Przyjęta tutaj liczba równoległych gałęzi Kb = 3 może być zmieniona. Należyjednak podkreślić, że zastosowanie większej liczby gałęzi z jednej strony poprawimożliwość dostosowania krzywych średniego czasu potwierdzenia trasy dla ustalonychparametrów do krzywej optymalnej, ale z drugiej strony konieczne będzie równieżzmodyfikowanie ograniczenia na częstość inicjalizowanych tras fałszywych w każdejz gałęzi do wartości Nf max/Kb. W rezultacie może okazać się, że mimo zwiększenialiczby gałęzi Kb wyniki nie poprawiają się.
106
Optymalizacja przetwarzania sygnałów
Otrzymany wyżej wynik jest jednym z głównych rezultatów pracy, a zarazem udo-wodnieniem jednej z tez pracy. Pokazano mianowicie, że dobierając parametry przetwa-rzania sygnałów, można zminimalizować średni czas inicjalizacji trasy prawdziwej przyustalonej maksymalnej częstości inicjalizacji tras fałszywych dla określonego SNRin.Ponieważ w rzeczywistym systemie występują echa obiektów o różnych wartościachSNRin, wybór jednego zestawu parametrów przetwarzania nie zapewnia optymalnegozachowania się systemu dla obiektów o różnej sile echa. Dzięki wykorzystaniu za-proponowanej struktury równoległej możliwej jest uzyskanie wyników zbliżonych dooptimum dla szerokiego zakresu wartości SNRin.
Jak pokazano na rys. 5.15, wynik ostateczny uzyskuje się przez fuzję tras ze wszyst-kich gałęzi przetwarzania. Fuzja tras polega na wzajemnym przyporządkowywaniu traspochodzących z różnych źródeł, tj. stwierdzaniu, które z tras odpowiadają temu sa-memu obiektowi. Najczęściej fuzję tras rozpatruje się w kontekście łączenia infor-macji z wielu sensorów. Przy założeniu, że estymaty wektorów stanów dwóch trassą niezależne, fuzja tras jest stosunkowo prosta [12] i polega na odpowiednim zło-żeniu estymaty wektora stanu oraz macierzy kowariancji. Założenie niezależności niejest jednak spełnione w praktyce. Wprawdzie można przyjąć, że błędy pomiaru sąniezależne (dla wielu sensorów), ale na obiekt działa ten sam szum procesu, przezco estymaty stanów są zależne. W takim przypadku fuzja tras jest również możliwa,lecz należy uwzględnić macierz kowariancji wzajemnej obydwu estymat, której wy-znaczenie może stwarzać pewne problemy. W rozwiązaniach praktycznych przyjmujesię zwykle proste założenie, że macierz kowariancji wzajemnej jest proporcjonalna domacierzy kowariancji obydwu estymat [12]. Zagadnienie fuzji tras w rozważanej struk-turze równoległej może przebiegać w podobny sposób, ale nie wchodzi ono w zakrespracy i nie będzie dalej omawiane.
Zastosowanie równoległej struktury układu inicjalizacji wymaga użycia Kb torówprzetwarzania z odmiennymi parametrami. Potencjalnie może to zwiększyć nakładobliczeniowy Kb-krotnie (dodać należy także nakład wynikający z fuzji tras). Wartojednak zauważyć, że pewne elementy przetwarzania sygnałów mogą być wykorzystanewe wszystkich gałęziach.
Najbardziej czasochłonnymi operacjami są filtracja adaptacyjna oraz obliczaniefunkcji niejednoznaczności wzajemnej, dlatego też pożądane byłoby zmniejszenie na-kładu obliczeniowego związanego z tymi procedurami. Okazuje się, że jest to możliwe.W przypadku zastosowania rekursywnego filtru adaptacyjnego (przeliczającego współ-czynniki z próbki na próbkę), podziału na równoległe gałęzie przetwarzania możnadokonać po operacji filtracji, tj. można podzielić sygnały z wyjścia filtru na bloki
107

Optymalizacja przetwarzania sygnałów
o odpowiedniej długości. Jeśli zastosowany jest blokowy filtr adaptacyjny, długośćfiltrowanych bloków sygnału można dobrać w taki sposób, aby granice bloków od-powiadały podziałowi czasowemu w różnych gałęziach układu inicjalizacji. W takiejsytuacji również można wykorzystać jeden filtr adaptacyjny, a podział na różne toryprzetwarzania może odbywać się na dalszym etapie.
Obliczanie funkcji nieoznaczoności wzajemnej może być również przeprowadzonetak, aby w równoległych gałęziach toru przetwarzania były wykorzystywane te samewyniki. W jednej z najbardziej wydajnych metod obliczania funkcji nieoznaczonościobydwa sygnały wejściowe (referencyjny i pomiarowy) są dzielone na bloki, a następ-nie obliczana jest funkcja korelacji dla odpowiednich bloków [84]. Obliczone funkcjekorelacji są następnie przetwarzane za pomocą dyskretnej transformaty Fouriera dlakażdego z opóźnień z osobna. Stosowanie tej metody umożliwia wykorzystanie wy-ników obliczeń częściowych funkcji korelacji we wszystkich z równoległych torówprzetwarzania, co w istotny sposób zredukuje nakład obliczeniowy związany oblicza-niem funkcji niejednoznaczności.
Opisana w rozdziale metoda optymalizacji czasu inicjalizacji trasy z zastosowaniemstruktury równoległej została przedstawiona przez autora w artykule [70] zgłoszonymdo publikacji w czasopiśmie IEEE Transactions on Aerospace and Electronic Systems.
5.5 Optymalizacja dokładności śledzenia
Drugim wskaźnikiem, który będzie podlegał optymalizacji, jest miara dokładnościśledzenia bistatycznej odległości σRT określona wzorem (5.21). Oprócz samej dokład-ności w procesie optymalizacji będą również uwzględniane ograniczenia na prawdopo-dobieństwo skasowania trasy prawdziwej po ustalonym czasie Ptl oraz średni czas ka-sowania trasy fałszywej Ttrm. Odpowiednie zależności zostały wyprowadzone w pierw-szej części tego rozdziału. Ponadto, podobnie jak przy optymalizacji średniego czasuinicjalizacji trasy, wszystkie parametry przetwarzania będą ograniczone od dołu i odgóry. Biorąc powyższe pod uwagę, zagadnienie optymalizacji dokładności śledzeniabistatycznej odległości można sformułować zgodnie z tablicą 5.8.
Dla optymalizowanej miary dokładności σRT oraz ograniczeń na Ptl i Ttrm jawniepodano argumenty, od których wielkości te zależą. Podobnie jak w przypadku średniegoczasu inicjalizacji trasy prawdziwej oraz częstości inicjalizacji trasy fałszywej, wielko-ści te uzależnione są od parametru SNRin, który nie podlega optymalizacji. Sama miaradokładności śledzenia σRT nie zależy od parametrów Mt i Nt algorytmu kasowania
108
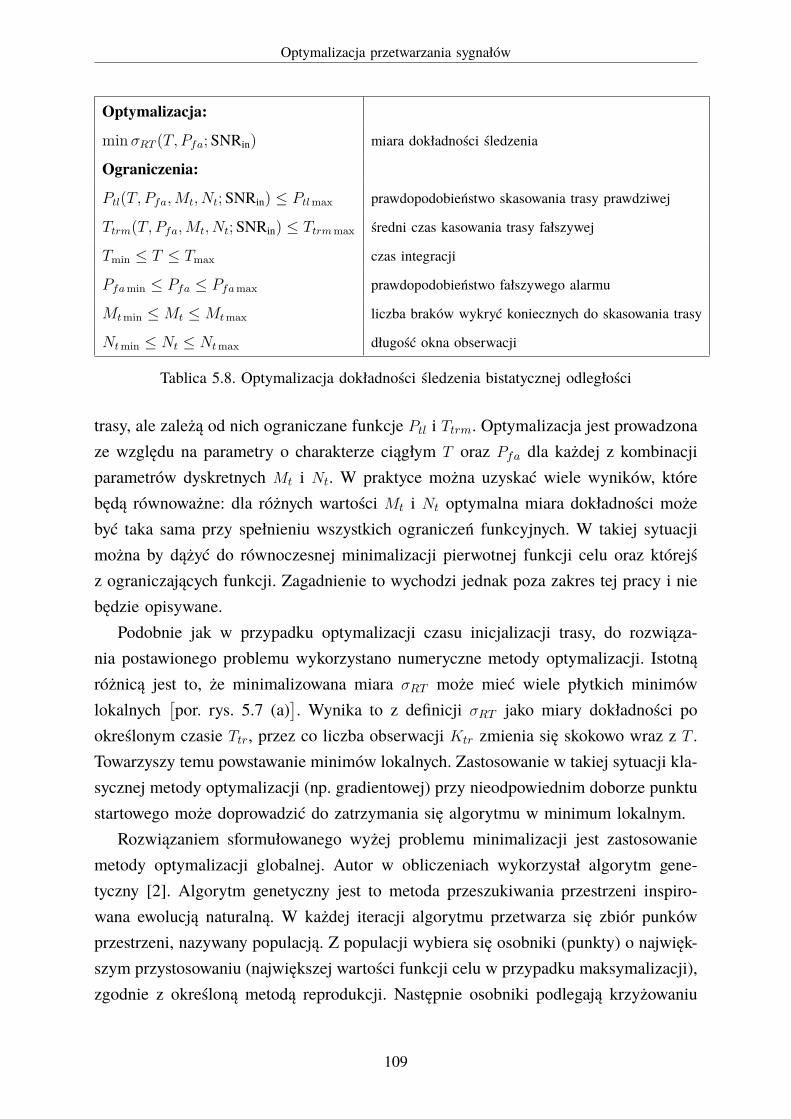
Optymalizacja przetwarzania sygnałów
Optymalizacja:
minσRT (T, Pfa; SNRin) miara dokładności śledzenia
Ograniczenia:
Ptl(T, Pfa,Mt, Nt; SNRin) ≤ Ptlmax prawdopodobieństwo skasowania trasy prawdziwej
Ttrm(T, Pfa,Mt, Nt; SNRin) ≤ Ttrmmax średni czas kasowania trasy fałszywej
Tmin ≤ T ≤ Tmax czas integracji
Pfamin ≤ Pfa ≤ Pfamax prawdopodobieństwo fałszywego alarmu
Mtmin ≤Mt ≤Mtmax liczba braków wykryć koniecznych do skasowania trasy
Ntmin ≤ Nt ≤ Ntmax długość okna obserwacji
Tablica 5.8. Optymalizacja dokładności śledzenia bistatycznej odległości
trasy, ale zależą od nich ograniczane funkcje Ptl i Ttrm. Optymalizacja jest prowadzonaze względu na parametry o charakterze ciągłym T oraz Pfa dla każdej z kombinacjiparametrów dyskretnych Mt i Nt. W praktyce można uzyskać wiele wyników, którebędą równoważne: dla różnych wartości Mt i Nt optymalna miara dokładności możebyć taka sama przy spełnieniu wszystkich ograniczeń funkcyjnych. W takiej sytuacjimożna by dążyć do równoczesnej minimalizacji pierwotnej funkcji celu oraz którejśz ograniczających funkcji. Zagadnienie to wychodzi jednak poza zakres tej pracy i niebędzie opisywane.
Podobnie jak w przypadku optymalizacji czasu inicjalizacji trasy, do rozwiąza-nia postawionego problemu wykorzystano numeryczne metody optymalizacji. Istotnąróżnicą jest to, że minimalizowana miara σRT może mieć wiele płytkich minimówlokalnych
[por. rys. 5.7 (a)
]. Wynika to z definicji σRT jako miary dokładności po
określonym czasie Ttr, przez co liczba obserwacji Ktr zmienia się skokowo wraz z T .Towarzyszy temu powstawanie minimów lokalnych. Zastosowanie w takiej sytuacji kla-sycznej metody optymalizacji (np. gradientowej) przy nieodpowiednim doborze punktustartowego może doprowadzić do zatrzymania się algorytmu w minimum lokalnym.
Rozwiązaniem sformułowanego wyżej problemu minimalizacji jest zastosowaniemetody optymalizacji globalnej. Autor w obliczeniach wykorzystał algorytm gene-tyczny [2]. Algorytm genetyczny jest to metoda przeszukiwania przestrzeni inspiro-wana ewolucją naturalną. W każdej iteracji algorytmu przetwarza się zbiór punkówprzestrzeni, nazywany populacją. Z populacji wybiera się osobniki (punkty) o najwięk-szym przystosowaniu (największej wartości funkcji celu w przypadku maksymalizacji),zgodnie z określoną metodą reprodukcji. Następnie osobniki podlegają krzyżowaniu
109
Optymalizacja przetwarzania sygnałów
i mutacji. Tak określony algorytm jest zdolny do odszukiwania optimum globalnego,nawet jeśli chwilowo cała populacja znajdzie się w okolicy maksimum lokalnego.
W obliczeniach wykorzystano algorytm ewolucyjny ze środowiska Matlab. Zasto-sowano reprodukcję proporcjonalną, mutację gaussowską oraz brak krzyżowania. Li-czebność populacji wynosiła 20, a liczba iteracji algorytmu 100.
Rysunek 5.17 przedstawia dwuwymiarowy wykres miary dokładności śledzenia σRTw funkcji czasu integracji T oraz prawdopodobieństwa fałszywego alarmu Pfa dla para-metrów typowych dla radia FM i telewizji DVB-T. Liniami przerywanymi zaznaczonoograniczenia wynikające z prawdopodobieństwa skasowania trasy prawdziwej Ptl orazśredniego czasu kasowania trasy fałszywej Ttrm. Wskazano również zakres dopusz-czalnych wartości parametrów T i Pfa. Rozwiązanie optymalne (z uwzględnieniemograniczeń) oznaczono krzyżykiem. Wykresy z omawianego rysunku potwierdzająwcześniejsze spostrzeżenie, że wartość σRT w okolicy minimum jest mało wrażliwa nadobór parametrów przetwarzania. Na wykresach można zaobserwować duże obszary,dla których σRT praktycznie nie zmienia się. Ponadto, jak pokazano wcześniej, warto-ści parametrów, dla których osiągane jest minimum σRT , nie zmieniają się istotnie dlaróżnych SNRin. Daje to nadzieję na znalezienie jednego zestawu parametrów przetwa-rzania, dla którego wyniki będą zbliżone do optymalnych w szerokim zakresie zmianwartości SNRin.
Mając powyższe na uwadze, zadanie optymalizacji można zmodyfikować podob-nie jak w przypadku minimalizacji średniego czasu inicjalizacji trasy. Optymalizo-waną wielkością jest miara dokładności śledzenia σRT uśredniona w pewnym zakresie〈SNRin min,SNRin max〉:
σavgRT (T, Pfa) =1
SNRin max − SNRin min
∫ SNRin max
SNRin min
σRT (T, Pfa; SNRin)dSNRin . (5.26)
Ograniczenie na prawdopodobieństwo skasowania prawdziwej trasy po określonymczasie jest modyfikowane tak, aby dla najgorszego przypadku odpowiadającego okre-ślonej wartości SNRin z przedziału 〈SNRin min,SNRin max〉 było ono spełnione:
Pmodtl (T, Pfa,Mt, Nt) = maxSNRin
Ptl(T, Pfa,Mt, Nt; SNRin) . (5.27)
W zbliżony sposób modyfikowane jest ograniczenie na średni czas kasowania fałszywejtrasy:
Tmodtrm (T, Pfa,Mt, Nt) = maxSNRin
Ttrm(T, Pfa,Mt, Nt; SNRin) . (5.28)
110

Optymalizacja przetwarzania sygnałów
(a)
2e+003
500250
180
180250
500
Pfa
T [s
]
σRT
[m] (oznaczenia na poziomicach)
10−8
10−6
10−4
10−210
−1
100
101
Ttrm
Ptl
(b)
2
2
5
5
11
0.7
0.7
1 2
Pfa
T [s
]
σRT
[m] (oznaczenia na poziomicach)
10−8
10−6
10−4
10−2
10−1
100
Ttrm
Ptl
Rys. 5.17. Miara dokładności śledzenia odległości bistatycznej wraz z naniesionymi ograni-czeniami oraz rozwiązaniem optymalnym (Mt = 4, Nt = 4, q = 1 m2/s5, Amax = 2 m/s2,γ = 16, Ptlmax = 0.1); (a) dla parametrów sygnału radia FM (SNRin = −32.5 dB,B = 50 kHz, fc = 100 MHz, Ttrmmax = 10 s), (b) dla parametrów sygnału telewizji DVB-T(SNRin = −49.5 dB, B = 8 MHz, fc = 600 MHz, Ttrmmax = 5 s).
Zmodyfikowany problem optymalizacji przedstawiono w tablicy 5.9.W praktyce całkowanie w przedziale 〈SNRin min,SNRin max〉 jest zastąpione sumą
skończonej liczby wartości z tego przedziału. Podobnie można postąpić przy wyzna-czaniu wartości funkcji ograniczających Ptl i Ttrm. W obliczeniach przyjęto 10 wartościSNRin z określonego przedziału.
Podobnie jak w przypadku inicjalizacji tras, tak i przy utrzymywaniu potwierdzo-nych tras echa obiektów o różnych wartościach SNRin są przetwarzane przez taki samfiltr Kalmana. Tak jak poprzednio, przyjęte będzie, że dokładność estymacji parame-trów ruchu w filtrze Kalmana będzie obliczana dla „najgorszego przypadku”, tj. przy
111
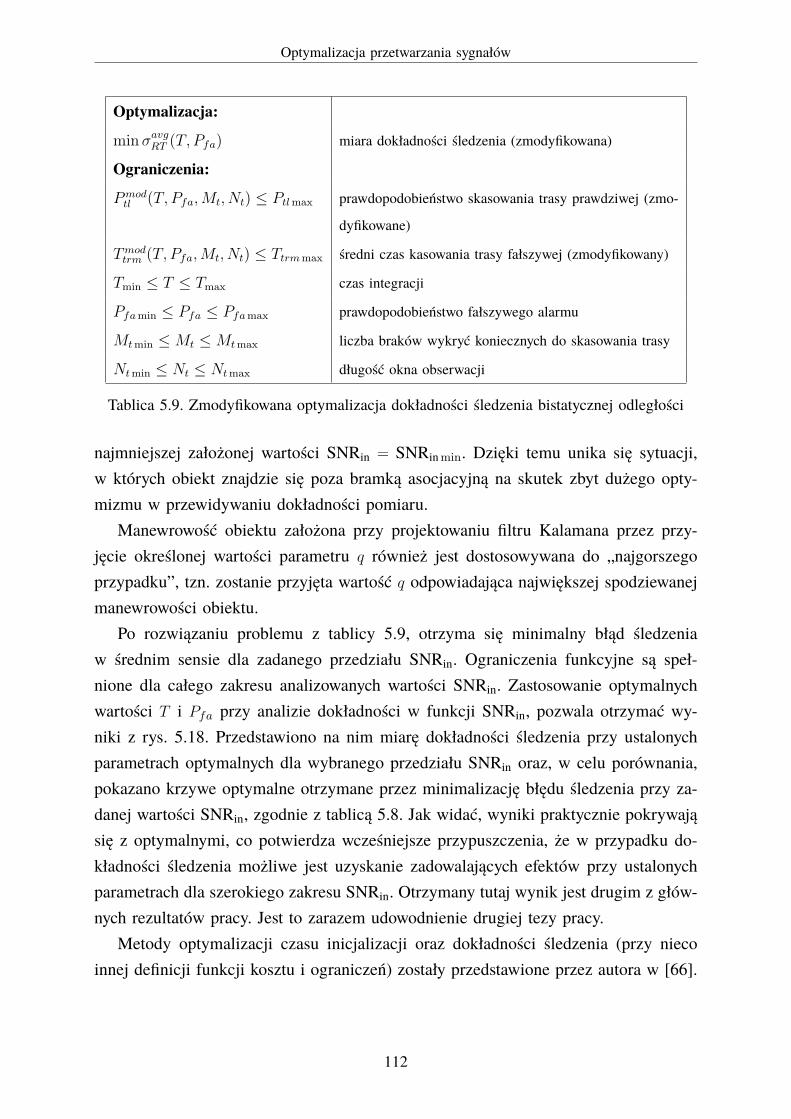
Optymalizacja przetwarzania sygnałów
Optymalizacja:
minσavgRT (T, Pfa) miara dokładności śledzenia (zmodyfikowana)
Ograniczenia:
Pmodtl (T, Pfa,Mt, Nt) ≤ Ptlmax prawdopodobieństwo skasowania trasy prawdziwej (zmo-
dyfikowane)
Tmodtrm (T, Pfa,Mt, Nt) ≤ Ttrmmax średni czas kasowania trasy fałszywej (zmodyfikowany)
Tmin ≤ T ≤ Tmax czas integracji
Pfamin ≤ Pfa ≤ Pfamax prawdopodobieństwo fałszywego alarmu
Mtmin ≤Mt ≤Mtmax liczba braków wykryć koniecznych do skasowania trasy
Ntmin ≤ Nt ≤ Ntmax długość okna obserwacji
Tablica 5.9. Zmodyfikowana optymalizacja dokładności śledzenia bistatycznej odległości
najmniejszej założonej wartości SNRin = SNRin min. Dzięki temu unika się sytuacji,w których obiekt znajdzie się poza bramką asocjacyjną na skutek zbyt dużego opty-mizmu w przewidywaniu dokładności pomiaru.
Manewrowość obiektu założona przy projektowaniu filtru Kalamana przez przy-jęcie określonej wartości parametru q również jest dostosowywana do „najgorszegoprzypadku”, tzn. zostanie przyjęta wartość q odpowiadająca największej spodziewanejmanewrowości obiektu.
Po rozwiązaniu problemu z tablicy 5.9, otrzyma się minimalny błąd śledzeniaw średnim sensie dla zadanego przedziału SNRin. Ograniczenia funkcyjne są speł-nione dla całego zakresu analizowanych wartości SNRin. Zastosowanie optymalnychwartości T i Pfa przy analizie dokładności w funkcji SNRin, pozwala otrzymać wy-niki z rys. 5.18. Przedstawiono na nim miarę dokładności śledzenia przy ustalonychparametrach optymalnych dla wybranego przedziału SNRin oraz, w celu porównania,pokazano krzywe optymalne otrzymane przez minimalizację błędu śledzenia przy za-danej wartości SNRin, zgodnie z tablicą 5.8. Jak widać, wyniki praktycznie pokrywająsię z optymalnymi, co potwierdza wcześniejsze przypuszczenia, że w przypadku do-kładności śledzenia możliwe jest uzyskanie zadowalających efektów przy ustalonychparametrach dla szerokiego zakresu SNRin. Otrzymany tutaj wynik jest drugim z głów-nych rezultatów pracy. Jest to zarazem udowodnienie drugiej tezy pracy.
Metody optymalizacji czasu inicjalizacji oraz dokładności śledzenia (przy niecoinnej definicji funkcji kosztu i ograniczeń) zostały przedstawione przez autora w [66].
112
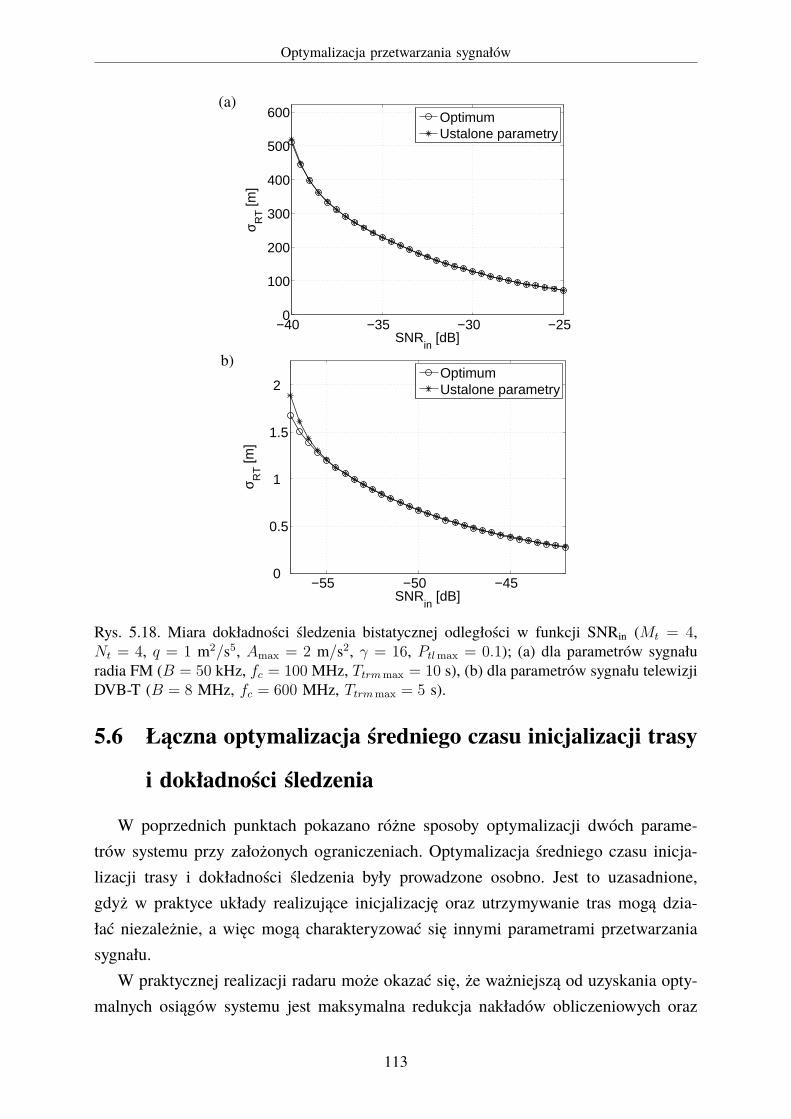
Optymalizacja przetwarzania sygnałów
(a)
−40 −35 −30 −250
100
200
300
400
500
600
SNRin
[dB]
σ RT [m
]
OptimumUstalone parametry
b)
−55 −50 −45 0
0.5
1
1.5
2
SNRin
[dB]
σ RT [m
]
OptimumUstalone parametry
Rys. 5.18. Miara dokładności śledzenia bistatycznej odległości w funkcji SNRin (Mt = 4,Nt = 4, q = 1 m2/s5, Amax = 2 m/s2, γ = 16, Ptlmax = 0.1); (a) dla parametrów sygnałuradia FM (B = 50 kHz, fc = 100 MHz, Ttrmmax = 10 s), (b) dla parametrów sygnału telewizjiDVB-T (B = 8 MHz, fc = 600 MHz, Ttrmmax = 5 s).
5.6 Łączna optymalizacja średniego czasu inicjalizacji trasy
i dokładności śledzenia
W poprzednich punktach pokazano różne sposoby optymalizacji dwóch parame-trów systemu przy założonych ograniczeniach. Optymalizacja średniego czasu inicja-lizacji trasy i dokładności śledzenia były prowadzone osobno. Jest to uzasadnione,gdyż w praktyce układy realizujące inicjalizację oraz utrzymywanie tras mogą dzia-łać niezależnie, a więc mogą charakteryzować się innymi parametrami przetwarzaniasygnału.
W praktycznej realizacji radaru może okazać się, że ważniejszą od uzyskania opty-malnych osiągów systemu jest maksymalna redukcja nakładów obliczeniowych oraz
113

Optymalizacja przetwarzania sygnałów
uproszczenie przetwarzania sygnałów. W takiej sytuacji korzystne byłoby wykorzy-stanie jednego zestawu parametrów w całym procesie przetwarzania, zarówno przyinicjalizacji, jak i przy utrzymywaniu tras. Aby uzyskać pożądane wartości parame-trów przetwarzania, można przeprowadzić optymalizację łączną, która uwzględniałabyobydwie wielkości – średni czas inicjalizacji trasy oraz dokładność śledzenia. Ponadtospełnione powinny być wszystkie ograniczenia: na częstość inicjalizacji tras fałszy-wych, prawdopodobieństwo skasowania trasy prawdziwej oraz średni czas kasowaniatrasy fałszywej.
Sformułowany w ten sposób problem zalicza się do klasy optymalizacji wielokryte-rialnej. Istnieje wiele metod rozwiązywania tego typu zagadnień, z których najprostsząjest przekształcenie wielu optymalizowanych wielkości w jedną za pomocą liniowejfunkcji agregującej [2]. Takie właśnie podejście zastosowano w pracy.
Ponieważ w rozważanej sytuacji poszukuje się jednego zestawu parametrów prze-twarzania, posłużono się uśrednionymi w przedziale zmian SNRin wartościami T avgc
i σavgRT . W tym celu zdefiniowano funkcję skalarną, będącą sumą ważoną powyższychwielkości:
C(T, Pfa,Mc, Nc) = ATTavgc (T, Pfa,Mc, Nc) + Aσσ
avgRT (T, Pfa) , (5.29)
gdzie AT [1/s] i Aσ [1/m] są pewnymi współczynnikami. Współczynniki te, po spro-wadzeniu do wspólnych jednostek, spełniają warunek AT · [s] + Aσ · [m] = 1. Problemoptymalizacji łącznej można sformułować zgodnie z tablicą 5.10. Funkcja kosztu C jestzależna od czterech parametrów: czasu integracji T , prawdopodobieństwa fałszywegoalarmu Pfa oraz parametrów logiki inicjalizacji trasy Mc i Nc. Ograniczane funkcjePmodtl i Tmodtrm zależą dodatkowo od parametrów logiki kasowania trasy Mt i Nt.
Optymalizacja jest prowadzona ze względu na parametry o charakterze ciągłym T
i Pfa dla wszystkich kombinacji parametrów dyskretnych: Mc, Nc, Mt i Nt. Łącznaliczba wszystkich kombinacji tych parametrów może sięgać dużych wartości, co możeznacząco wydłużyć szukanie rozwiązania optymalnego. Można jednak ograniczyć za-kres zmienności parametrów dyskretnych na podstawie wcześniejszych rezultatów, uzy-skanych w przypadku osobnej optymalizacji rozważanych dwóch wielkości.
Na rysunku 5.19 przedstawiono wykresy łącznej funkcji kosztu C wraz z ograni-czeniami kostkowymi i funkcyjnymi oraz znalezione optimum. Przyjęto, że średni czasinicjalizacji trasy oraz dokładność śledzenia bistatycznej odległości są uwzględnianew funkcji kosztu z taką samą wagą, tzn. AT = 0.5 i Aσ = 0.5. Jak widać na wykresach,nałożone ograniczenia w znaczący sposób zawężają zakres dopuszczalnych parame-
114
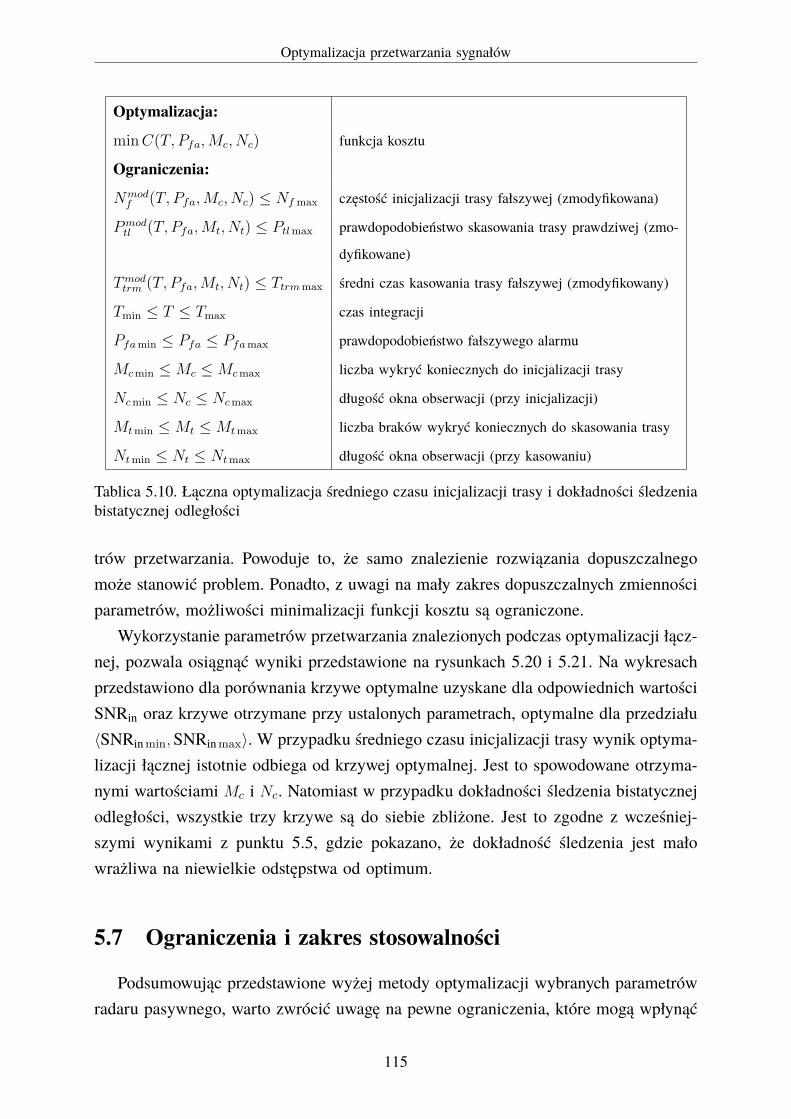
Optymalizacja przetwarzania sygnałów
Optymalizacja:
minC(T, Pfa,Mc, Nc) funkcja kosztu
Ograniczenia:
Nmodf (T, Pfa,Mc, Nc) ≤ Nf max częstość inicjalizacji trasy fałszywej (zmodyfikowana)
Pmodtl (T, Pfa,Mt, Nt) ≤ Ptlmax prawdopodobieństwo skasowania trasy prawdziwej (zmo-
dyfikowane)
Tmodtrm (T, Pfa,Mt, Nt) ≤ Ttrmmax średni czas kasowania trasy fałszywej (zmodyfikowany)
Tmin ≤ T ≤ Tmax czas integracji
Pfamin ≤ Pfa ≤ Pfamax prawdopodobieństwo fałszywego alarmu
Mcmin ≤Mc ≤Mcmax liczba wykryć koniecznych do inicjalizacji trasy
Ncmin ≤ Nc ≤ Ncmax długość okna obserwacji (przy inicjalizacji)
Mtmin ≤Mt ≤Mtmax liczba braków wykryć koniecznych do skasowania trasy
Ntmin ≤ Nt ≤ Ntmax długość okna obserwacji (przy kasowaniu)
Tablica 5.10. Łączna optymalizacja średniego czasu inicjalizacji trasy i dokładności śledzeniabistatycznej odległości
trów przetwarzania. Powoduje to, że samo znalezienie rozwiązania dopuszczalnegomoże stanowić problem. Ponadto, z uwagi na mały zakres dopuszczalnych zmiennościparametrów, możliwości minimalizacji funkcji kosztu są ograniczone.
Wykorzystanie parametrów przetwarzania znalezionych podczas optymalizacji łącz-nej, pozwala osiągnąć wyniki przedstawione na rysunkach 5.20 i 5.21. Na wykresachprzedstawiono dla porównania krzywe optymalne uzyskane dla odpowiednich wartościSNRin oraz krzywe otrzymane przy ustalonych parametrach, optymalne dla przedziału〈SNRin min,SNRin max〉. W przypadku średniego czasu inicjalizacji trasy wynik optyma-lizacji łącznej istotnie odbiega od krzywej optymalnej. Jest to spowodowane otrzyma-nymi wartościami Mc i Nc. Natomiast w przypadku dokładności śledzenia bistatycznejodległości, wszystkie trzy krzywe są do siebie zbliżone. Jest to zgodne z wcześniej-szymi wynikami z punktu 5.5, gdzie pokazano, że dokładność śledzenia jest małowrażliwa na niewielkie odstępstwa od optimum.
5.7 Ograniczenia i zakres stosowalności
Podsumowując przedstawione wyżej metody optymalizacji wybranych parametrówradaru pasywnego, warto zwrócić uwagę na pewne ograniczenia, które mogą wpłynąć
115
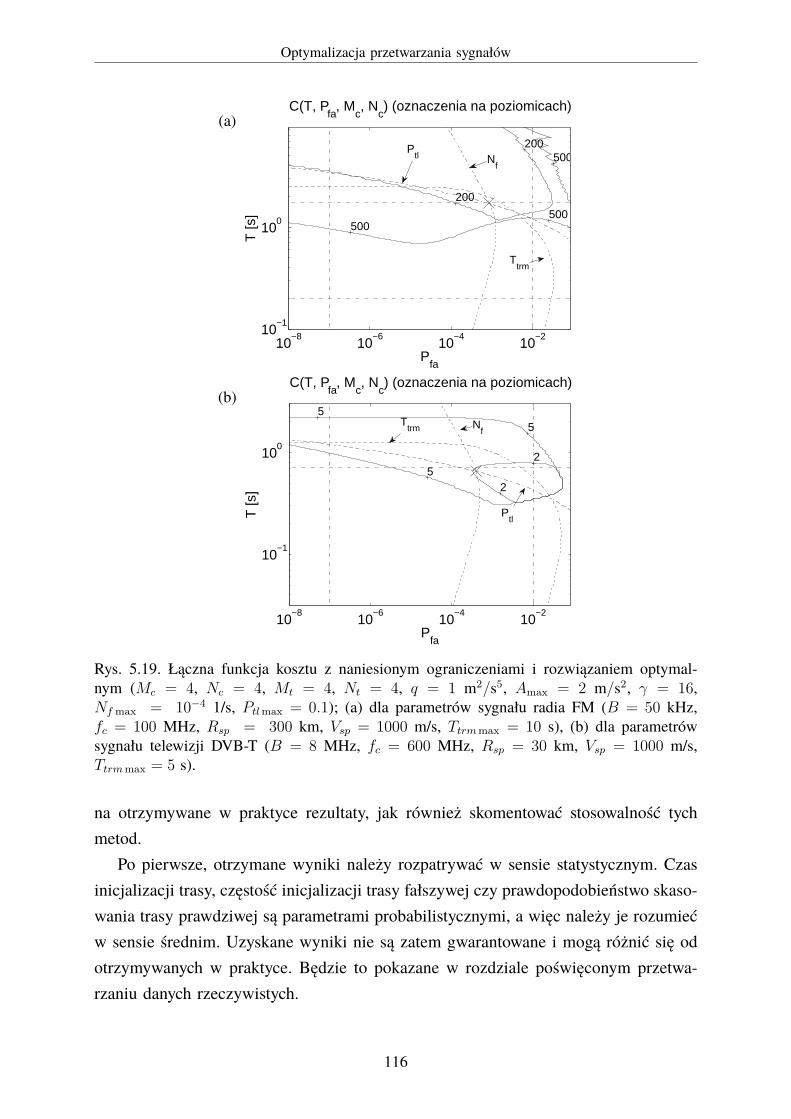
Optymalizacja przetwarzania sygnałów
(a)
500500
200500
200
Pfa
T [s
]
C(T, Pfa
, Mc, N
c) (oznaczenia na poziomicach)
10−8
10−6
10−4
10−210
−1
100
Nf
Ttrm
Ptl
(b)
5
52
2
5
Pfa
T [s
]
C(T, Pfa
, Mc, N
c) (oznaczenia na poziomicach)
10−8
10−6
10−4
10−2
10−1
100
Nf
Ttrm
Ptl
Rys. 5.19. Łączna funkcja kosztu z naniesionym ograniczeniami i rozwiązaniem optymal-nym (Mc = 4, Nc = 4, Mt = 4, Nt = 4, q = 1 m2/s5, Amax = 2 m/s2, γ = 16,Nf max = 10−4 1/s, Ptlmax = 0.1); (a) dla parametrów sygnału radia FM (B = 50 kHz,fc = 100 MHz, Rsp = 300 km, Vsp = 1000 m/s, Ttrmmax = 10 s), (b) dla parametrówsygnału telewizji DVB-T (B = 8 MHz, fc = 600 MHz, Rsp = 30 km, Vsp = 1000 m/s,Ttrmmax = 5 s).
na otrzymywane w praktyce rezultaty, jak również skomentować stosowalność tychmetod.
Po pierwsze, otrzymane wyniki należy rozpatrywać w sensie statystycznym. Czasinicjalizacji trasy, częstość inicjalizacji trasy fałszywej czy prawdopodobieństwo skaso-wania trasy prawdziwej są parametrami probabilistycznymi, a więc należy je rozumiećw sensie średnim. Uzyskane wyniki nie są zatem gwarantowane i mogą różnić się odotrzymywanych w praktyce. Będzie to pokazane w rozdziale poświęconym przetwa-rzaniu danych rzeczywistych.
116
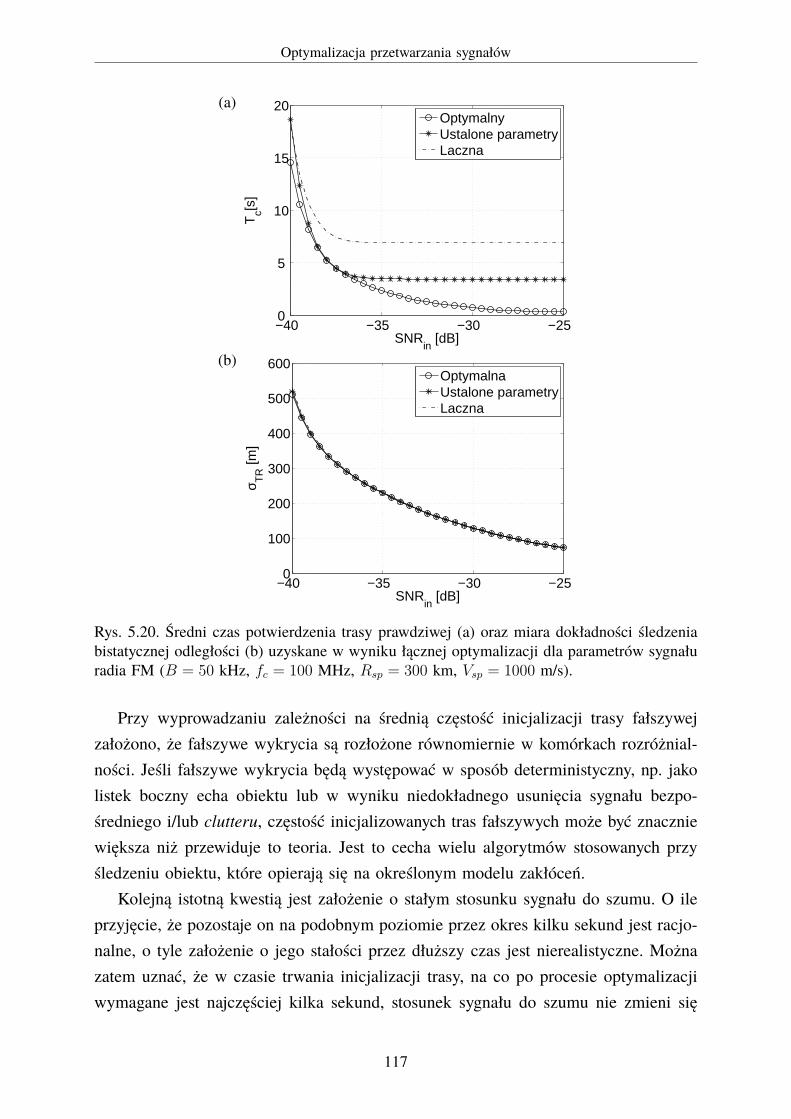
Optymalizacja przetwarzania sygnałów
(a)
−40 −35 −30 −25 0
5
10
15
20
SNRin
[dB]
Tc[s
]
OptymalnyUstalone parametryLaczna
(b)
−40 −35 −30 −250
100
200
300
400
500
600
SNRin
[dB]
σ TR [m
]
OptymalnaUstalone parametryLaczna
Rys. 5.20. Średni czas potwierdzenia trasy prawdziwej (a) oraz miara dokładności śledzeniabistatycznej odległości (b) uzyskane w wyniku łącznej optymalizacji dla parametrów sygnałuradia FM (B = 50 kHz, fc = 100 MHz, Rsp = 300 km, Vsp = 1000 m/s).
Przy wyprowadzaniu zależności na średnią częstość inicjalizacji trasy fałszywejzałożono, że fałszywe wykrycia są rozłożone równomiernie w komórkach rozróżnial-ności. Jeśli fałszywe wykrycia będą występować w sposób deterministyczny, np. jakolistek boczny echa obiektu lub w wyniku niedokładnego usunięcia sygnału bezpo-średniego i/lub clutteru, częstość inicjalizowanych tras fałszywych może być znaczniewiększa niż przewiduje to teoria. Jest to cecha wielu algorytmów stosowanych przyśledzeniu obiektu, które opierają się na określonym modelu zakłóceń.
Kolejną istotną kwestią jest założenie o stałym stosunku sygnału do szumu. O ileprzyjęcie, że pozostaje on na podobnym poziomie przez okres kilku sekund jest racjo-nalne, o tyle założenie o jego stałości przez dłuższy czas jest nierealistyczne. Możnazatem uznać, że w czasie trwania inicjalizacji trasy, na co po procesie optymalizacjiwymagane jest najczęściej kilka sekund, stosunek sygnału do szumu nie zmieni się
117
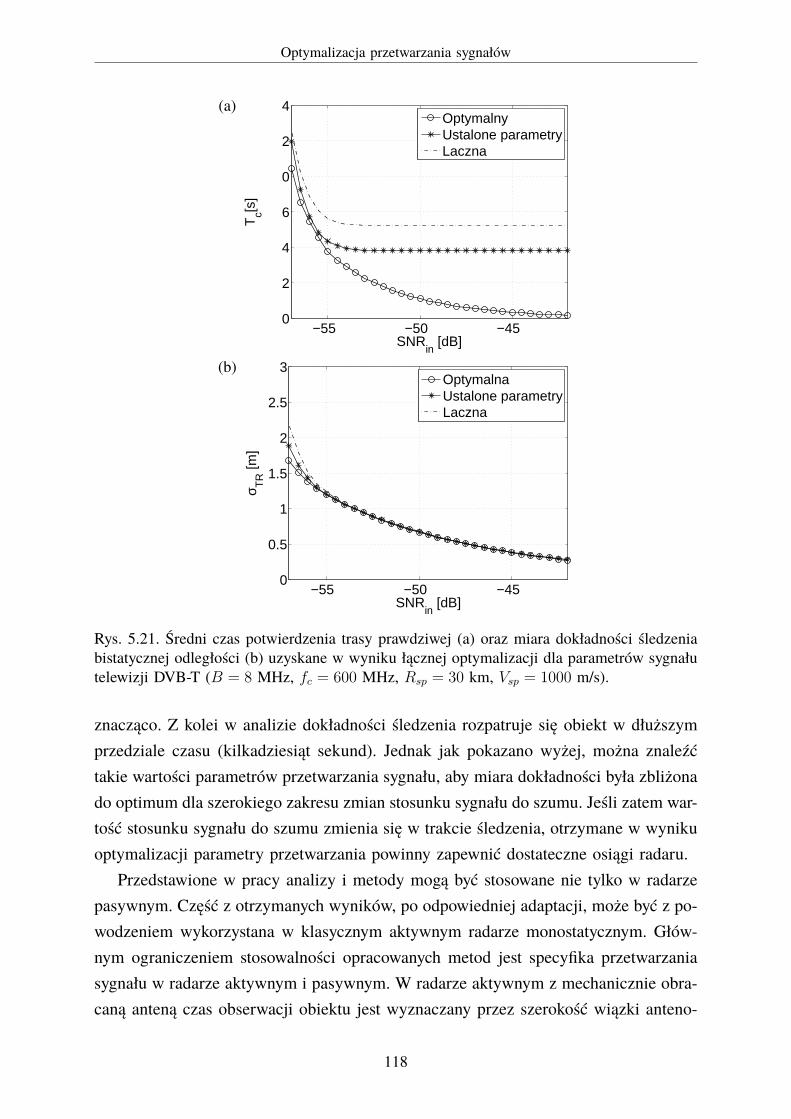
Optymalizacja przetwarzania sygnałów
(a)
−55 −50 −45 0
2
4
6
0
2
4
SNRin
[dB]
Tc[s
]
OptymalnyUstalone parametryLaczna
(b)
−55 −50 −450
0.5
1
1.5
2
2.5
3
SNRin
[dB]
σ TR [m
]
OptymalnaUstalone parametryLaczna
Rys. 5.21. Średni czas potwierdzenia trasy prawdziwej (a) oraz miara dokładności śledzeniabistatycznej odległości (b) uzyskane w wyniku łącznej optymalizacji dla parametrów sygnałutelewizji DVB-T (B = 8 MHz, fc = 600 MHz, Rsp = 30 km, Vsp = 1000 m/s).
znacząco. Z kolei w analizie dokładności śledzenia rozpatruje się obiekt w dłuższymprzedziale czasu (kilkadziesiąt sekund). Jednak jak pokazano wyżej, można znaleźćtakie wartości parametrów przetwarzania sygnału, aby miara dokładności była zbliżonado optimum dla szerokiego zakresu zmian stosunku sygnału do szumu. Jeśli zatem war-tość stosunku sygnału do szumu zmienia się w trakcie śledzenia, otrzymane w wynikuoptymalizacji parametry przetwarzania powinny zapewnić dostateczne osiągi radaru.
Przedstawione w pracy analizy i metody mogą być stosowane nie tylko w radarzepasywnym. Część z otrzymanych wyników, po odpowiedniej adaptacji, może być z po-wodzeniem wykorzystana w klasycznym aktywnym radarze monostatycznym. Głów-nym ograniczeniem stosowalności opracowanych metod jest specyfika przetwarzaniasygnału w radarze aktywnym i pasywnym. W radarze aktywnym z mechanicznie obra-caną anteną czas obserwacji obiektu jest wyznaczany przez szerokość wiązki anteno-
118
Optymalizacja przetwarzania sygnałów
wej oraz szybkość obrotu anteny. Z tego względu, możliwe jest ustalenie tylko jednegoczasu obserwacji obiektu dla całego systemu. W radarze pasywnym długość czasu ob-serwacji obiektu może być dobierana arbitralnie na etapie przetwarzania sygnału, przezpodział ciągłego sygnału na bloki o odpowiedniej długości. Z tego powodu, stworze-nie równoległej struktury układu inicjalizacji trasy zaproponowanej w pracy byłobyw przypadku radaru aktywnego niemożliwe.
119
Rozdział 6
Wyniki eksperymentów symulacyjnych
W poprzednich rozdziałach przyjęto szereg założeń, które w znaczący sposóbupraszczały analizę przetwarzania sygnałów w radarze pasywnym. Niektóre z tychzałożeń są niemalże standardowe w dziedzinie radiolokacji, niektóre jednak wymagająuzasadnienia. Głównym celem tego rozdziału jest wykazanie słuszności istotnych zało-żeń za pomocą symulacji komputerowych, jak również potwierdzenie wyników analizyteoretycznej.
6.1 Korelacja
W punkcie 4.1 stwierdzono, że przy określonych warunkach stosunek sygnału doszumu SNR może być mierzony jako stosunek maksimum modułu funkcji korelacji dośredniego poziomu podłogi szumowej PNFR. Założenie to jest kluczowe dla określeniasiły echa, zwłaszcza przy przetwarzaniu sygnałów rzeczywistych, kiedy prawdziwe war-tości parametrów sygnału są nieznane. Aby ocenić zakres stosowalności tego założenia,przeprowadzono symulacje komputerowe. Jako sygnał referencyjny wykorzystano rze-czywisty sygnał radia FM oraz telewizji DVB-T. W przypadku sygnału radia FM pasmowynosiło ok. 50 kHz, a częstotliwość nośna 91 MHz. Z kolei sygnał telewizji DVB-Tcharakteryzował się pasmem ok. 7.6 MHz, natomiast częstotliwość nośna wynosiła746 MHz. Długość bloku przetwarzanych sygnałów wynosiła 1 s dla radia FM i 0.1 sdla telewizji DVB-T. Sygnał pomiarowy otrzymano przez zsumowanie opóźnionej orazprzesuniętej dopplerowsko kopii sygnału referencyjnego i zespolonego gaussowskiegoszumu białego o odpowiedniej amplitudzie. Poziom podłogi szumowej estymowanoprzez uśrednianie wartości modułu funkcji nieoznaczoności wzajemnej w zakresie od-ległości R i prędkości V znajdującym się w innym obszarze niż echo obiektu. Na
120
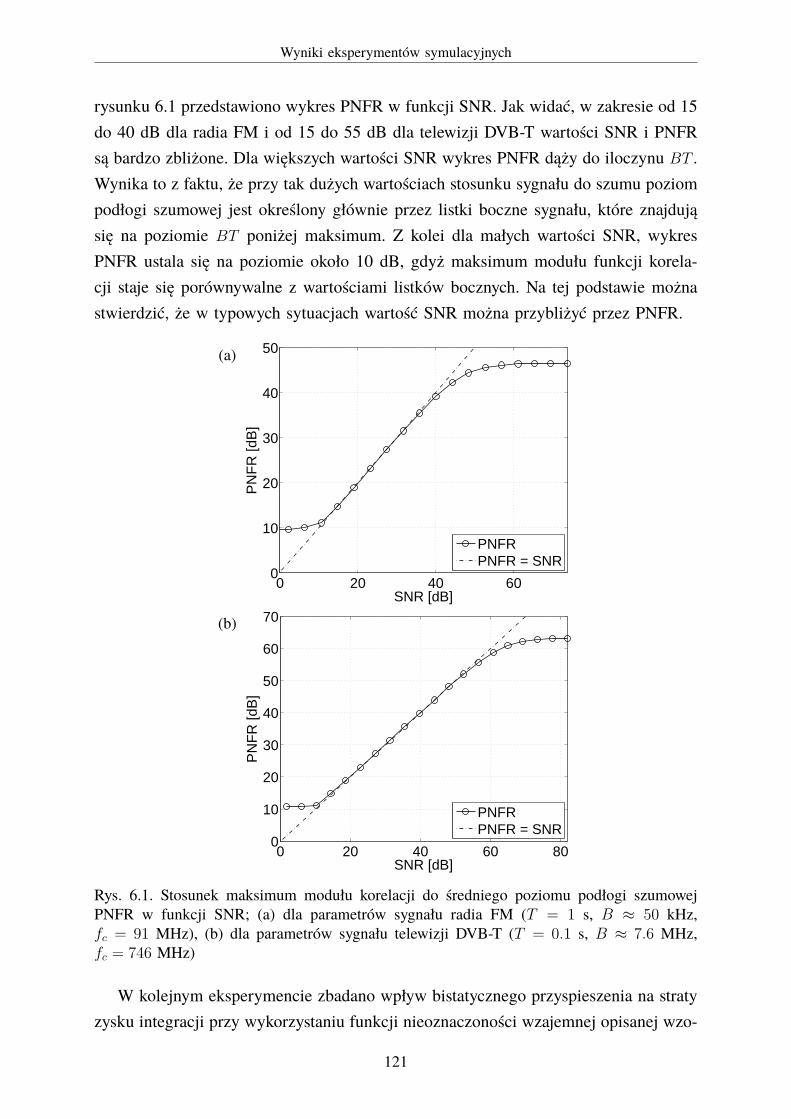
Wyniki eksperymentów symulacyjnych
rysunku 6.1 przedstawiono wykres PNFR w funkcji SNR. Jak widać, w zakresie od 15do 40 dB dla radia FM i od 15 do 55 dB dla telewizji DVB-T wartości SNR i PNFRsą bardzo zbliżone. Dla większych wartości SNR wykres PNFR dąży do iloczynu BT .Wynika to z faktu, że przy tak dużych wartościach stosunku sygnału do szumu poziompodłogi szumowej jest określony głównie przez listki boczne sygnału, które znajdująsię na poziomie BT poniżej maksimum. Z kolei dla małych wartości SNR, wykresPNFR ustala się na poziomie około 10 dB, gdyż maksimum modułu funkcji korela-cji staje się porównywalne z wartościami listków bocznych. Na tej podstawie możnastwierdzić, że w typowych sytuacjach wartość SNR można przybliżyć przez PNFR.
(a)
0 20 40 600
10
20
30
40
50
SNR [dB]
PN
FR
[dB
]
PNFRPNFR = SNR
(b)
0 20 40 60 800
10
20
30
40
50
60
70
SNR [dB]
PN
FR
[dB
]
PNFRPNFR = SNR
Rys. 6.1. Stosunek maksimum modułu korelacji do średniego poziomu podłogi szumowejPNFR w funkcji SNR; (a) dla parametrów sygnału radia FM (T = 1 s, B ≈ 50 kHz,fc = 91 MHz), (b) dla parametrów sygnału telewizji DVB-T (T = 0.1 s, B ≈ 7.6 MHz,fc = 746 MHz)
W kolejnym eksperymencie zbadano wpływ bistatycznego przyspieszenia na stratyzysku integracji przy wykorzystaniu funkcji nieoznaczoności wzajemnej opisanej wzo-
121
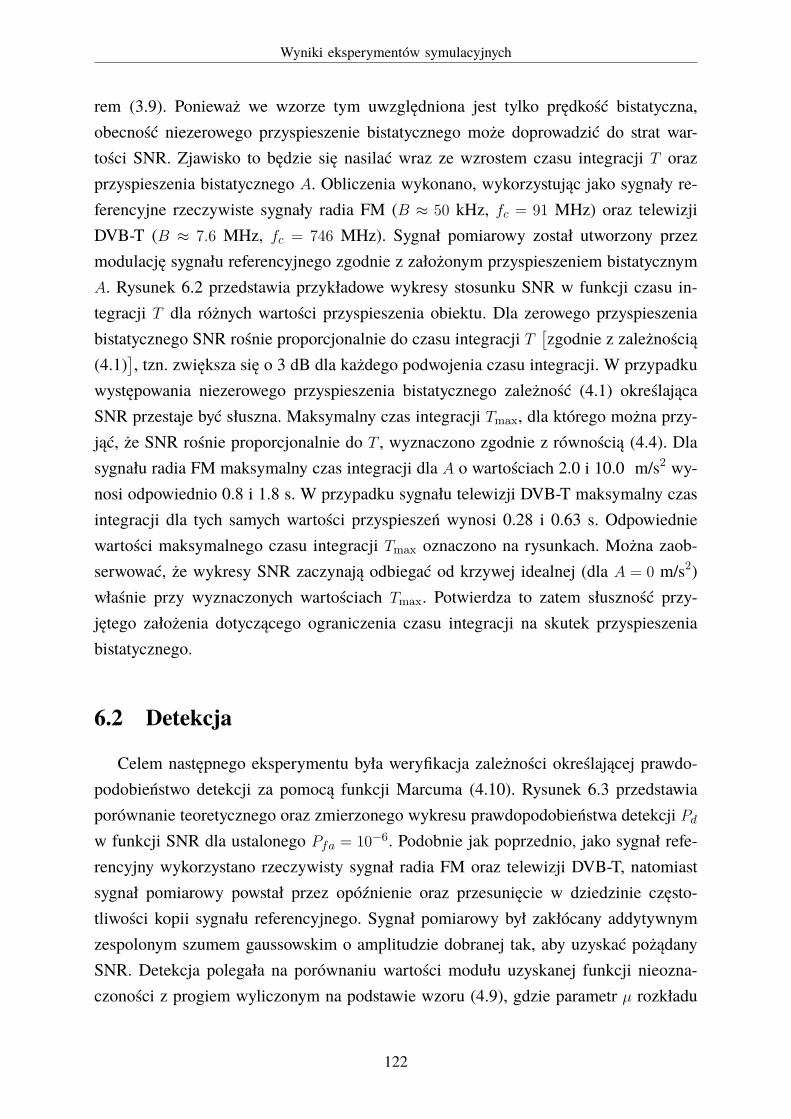
Wyniki eksperymentów symulacyjnych
rem (3.9). Ponieważ we wzorze tym uwzględniona jest tylko prędkość bistatyczna,obecność niezerowego przyspieszenie bistatycznego może doprowadzić do strat war-tości SNR. Zjawisko to będzie się nasilać wraz ze wzrostem czasu integracji T orazprzyspieszenia bistatycznego A. Obliczenia wykonano, wykorzystując jako sygnały re-ferencyjne rzeczywiste sygnały radia FM (B ≈ 50 kHz, fc = 91 MHz) oraz telewizjiDVB-T (B ≈ 7.6 MHz, fc = 746 MHz). Sygnał pomiarowy został utworzony przezmodulację sygnału referencyjnego zgodnie z założonym przyspieszeniem bistatycznymA. Rysunek 6.2 przedstawia przykładowe wykresy stosunku SNR w funkcji czasu in-tegracji T dla różnych wartości przyspieszenia obiektu. Dla zerowego przyspieszeniabistatycznego SNR rośnie proporcjonalnie do czasu integracji T
[zgodnie z zależnością
(4.1)], tzn. zwiększa się o 3 dB dla każdego podwojenia czasu integracji. W przypadku
występowania niezerowego przyspieszenia bistatycznego zależność (4.1) określającaSNR przestaje być słuszna. Maksymalny czas integracji Tmax, dla którego można przy-jąć, że SNR rośnie proporcjonalnie do T , wyznaczono zgodnie z równością (4.4). Dlasygnału radia FM maksymalny czas integracji dla A o wartościach 2.0 i 10.0 m/s2 wy-nosi odpowiednio 0.8 i 1.8 s. W przypadku sygnału telewizji DVB-T maksymalny czasintegracji dla tych samych wartości przyspieszeń wynosi 0.28 i 0.63 s. Odpowiedniewartości maksymalnego czasu integracji Tmax oznaczono na rysunkach. Można zaob-serwować, że wykresy SNR zaczynają odbiegać od krzywej idealnej (dla A = 0 m/s2)właśnie przy wyznaczonych wartościach Tmax. Potwierdza to zatem słuszność przy-jętego założenia dotyczącego ograniczenia czasu integracji na skutek przyspieszeniabistatycznego.
6.2 Detekcja
Celem następnego eksperymentu była weryfikacja zależności określającej prawdo-podobieństwo detekcji za pomocą funkcji Marcuma (4.10). Rysunek 6.3 przedstawiaporównanie teoretycznego oraz zmierzonego wykresu prawdopodobieństwa detekcji Pdw funkcji SNR dla ustalonego Pfa = 10−6. Podobnie jak poprzednio, jako sygnał refe-rencyjny wykorzystano rzeczywisty sygnał radia FM oraz telewizji DVB-T, natomiastsygnał pomiarowy powstał przez opóźnienie oraz przesunięcie w dziedzinie często-tliwości kopii sygnału referencyjnego. Sygnał pomiarowy był zakłócany addytywnymzespolonym szumem gaussowskim o amplitudzie dobranej tak, aby uzyskać pożądanySNR. Detekcja polegała na porównaniu wartości modułu uzyskanej funkcji nieozna-czoności z progiem wyliczonym na podstawie wzoru (4.9), gdzie parametr µ rozkładu
122
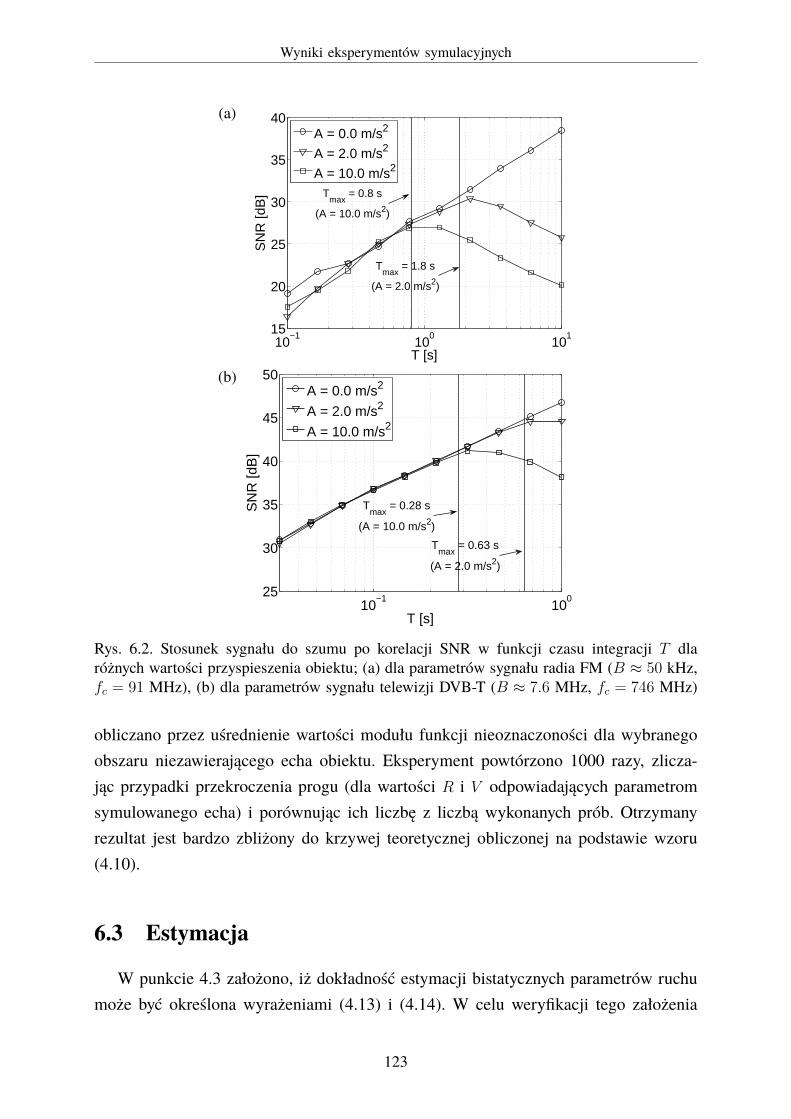
Wyniki eksperymentów symulacyjnych
(a)
10−1
100
10115
20
25
30
35
40
T [s]
SN
R [d
B]
A = 0.0 m/s2
A = 2.0 m/s2
A = 10.0 m/s2
Tmax
= 0.8 s
(A = 10.0 m/s2)
Tmax
= 1.8 s
(A = 2.0 m/s2)
(b)
10−1
10025
30
35
40
45
50
T [s]
SN
R [d
B]
A = 0.0 m/s2
A = 2.0 m/s2
A = 10.0 m/s2
Tmax
= 0.28 s
(A = 10.0 m/s2)
Tmax
= 0.63 s
(A = 2.0 m/s2)
Rys. 6.2. Stosunek sygnału do szumu po korelacji SNR w funkcji czasu integracji T dlaróżnych wartości przyspieszenia obiektu; (a) dla parametrów sygnału radia FM (B ≈ 50 kHz,fc = 91 MHz), (b) dla parametrów sygnału telewizji DVB-T (B ≈ 7.6 MHz, fc = 746 MHz)
obliczano przez uśrednienie wartości modułu funkcji nieoznaczoności dla wybranegoobszaru niezawierającego echa obiektu. Eksperyment powtórzono 1000 razy, zlicza-jąc przypadki przekroczenia progu (dla wartości R i V odpowiadających parametromsymulowanego echa) i porównując ich liczbę z liczbą wykonanych prób. Otrzymanyrezultat jest bardzo zbliżony do krzywej teoretycznej obliczonej na podstawie wzoru(4.10).
6.3 Estymacja
W punkcie 4.3 założono, iż dokładność estymacji bistatycznych parametrów ruchumoże być określona wyrażeniami (4.13) i (4.14). W celu weryfikacji tego założenia
123
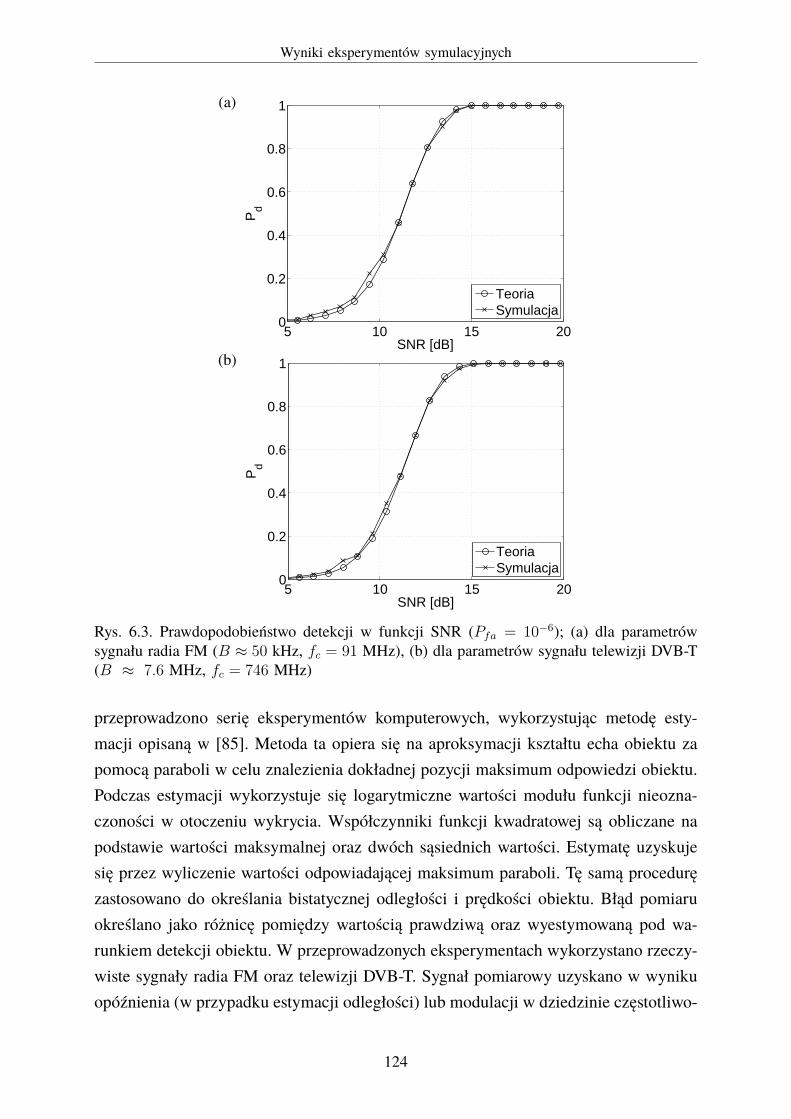
Wyniki eksperymentów symulacyjnych
(a)
5 10 15 200
0.2
0.4
0.6
0.8
1
SNR [dB]
Pd
TeoriaSymulacja
(b)
5 10 15 200
0.2
0.4
0.6
0.8
1
SNR [dB]
Pd
TeoriaSymulacja
Rys. 6.3. Prawdopodobieństwo detekcji w funkcji SNR (Pfa = 10−6); (a) dla parametrówsygnału radia FM (B ≈ 50 kHz, fc = 91 MHz), (b) dla parametrów sygnału telewizji DVB-T(B ≈ 7.6 MHz, fc = 746 MHz)
przeprowadzono serię eksperymentów komputerowych, wykorzystując metodę esty-macji opisaną w [85]. Metoda ta opiera się na aproksymacji kształtu echa obiektu zapomocą paraboli w celu znalezienia dokładnej pozycji maksimum odpowiedzi obiektu.Podczas estymacji wykorzystuje się logarytmiczne wartości modułu funkcji nieozna-czoności w otoczeniu wykrycia. Współczynniki funkcji kwadratowej są obliczane napodstawie wartości maksymalnej oraz dwóch sąsiednich wartości. Estymatę uzyskujesię przez wyliczenie wartości odpowiadającej maksimum paraboli. Tę samą proceduręzastosowano do określania bistatycznej odległości i prędkości obiektu. Błąd pomiaruokreślano jako różnicę pomiędzy wartością prawdziwą oraz wyestymowaną pod wa-runkiem detekcji obiektu. W przeprowadzonych eksperymentach wykorzystano rzeczy-wiste sygnały radia FM oraz telewizji DVB-T. Sygnał pomiarowy uzyskano w wynikuopóźnienia (w przypadku estymacji odległości) lub modulacji w dziedzinie częstotliwo-
124
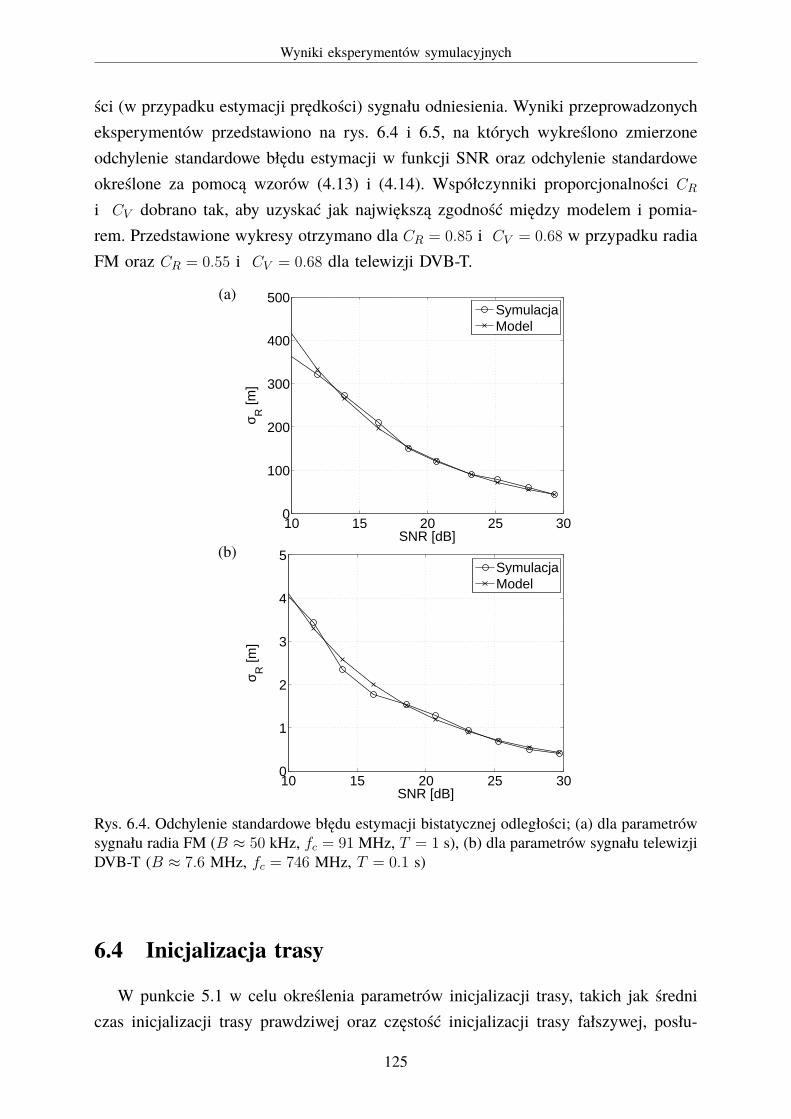
Wyniki eksperymentów symulacyjnych
ści (w przypadku estymacji prędkości) sygnału odniesienia. Wyniki przeprowadzonycheksperymentów przedstawiono na rys. 6.4 i 6.5, na których wykreślono zmierzoneodchylenie standardowe błędu estymacji w funkcji SNR oraz odchylenie standardoweokreślone za pomocą wzorów (4.13) i (4.14). Współczynniki proporcjonalności CRi CV dobrano tak, aby uzyskać jak największą zgodność między modelem i pomia-rem. Przedstawione wykresy otrzymano dla CR = 0.85 i CV = 0.68 w przypadku radiaFM oraz CR = 0.55 i CV = 0.68 dla telewizji DVB-T.
(a)
10 15 20 25 300
100
200
300
400
500
SNR [dB]
σ R [m
]
SymulacjaModel
(b)
10 15 20 25 30 0
1
2
3
4
5
SNR [dB]
σ R [m
]
SymulacjaModel
Rys. 6.4. Odchylenie standardowe błędu estymacji bistatycznej odległości; (a) dla parametrówsygnału radia FM (B ≈ 50 kHz, fc = 91 MHz, T = 1 s), (b) dla parametrów sygnału telewizjiDVB-T (B ≈ 7.6 MHz, fc = 746 MHz, T = 0.1 s)
6.4 Inicjalizacja trasy
W punkcie 5.1 w celu określenia parametrów inicjalizacji trasy, takich jak średniczas inicjalizacji trasy prawdziwej oraz częstość inicjalizacji trasy fałszywej, posłu-
125
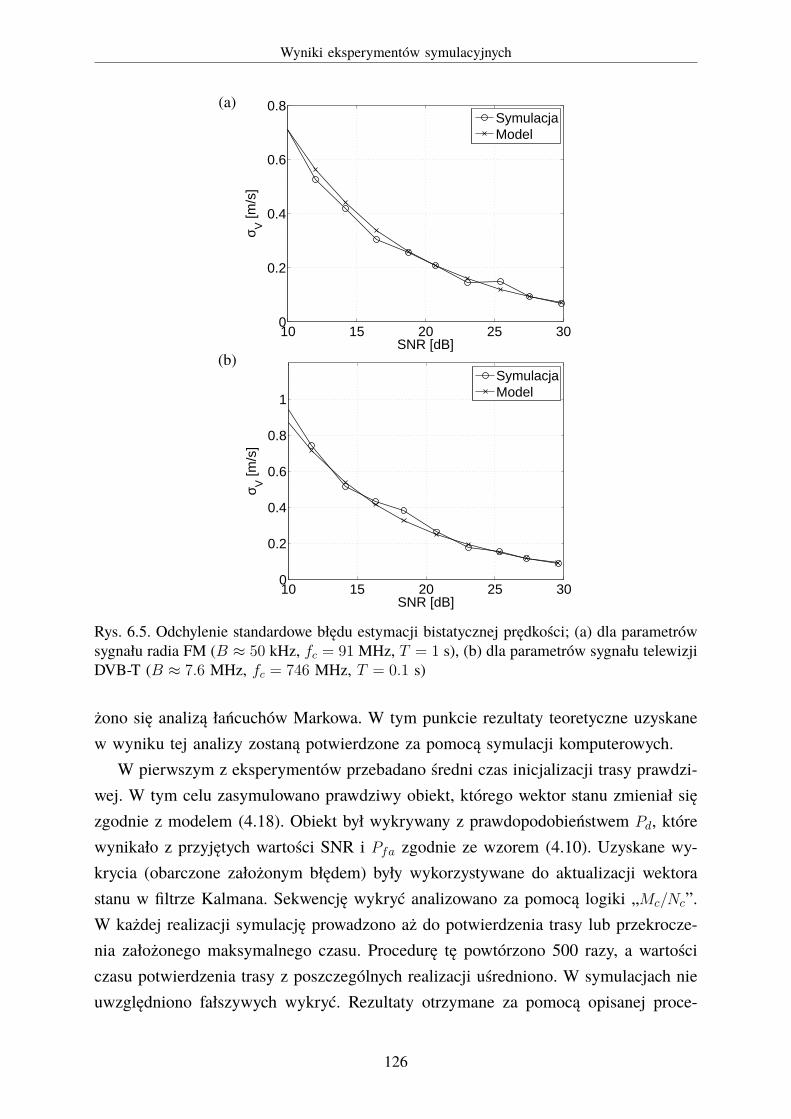
Wyniki eksperymentów symulacyjnych
(a)
10 15 20 25 300
0.2
0.4
0.6
0.8
SNR [dB]
σ V [m
/s]
SymulacjaModel
(b)
10 15 20 25 300
0.2
0.4
0.6
0.8
1
SNR [dB]
σ V [m
/s]
SymulacjaModel
Rys. 6.5. Odchylenie standardowe błędu estymacji bistatycznej prędkości; (a) dla parametrówsygnału radia FM (B ≈ 50 kHz, fc = 91 MHz, T = 1 s), (b) dla parametrów sygnału telewizjiDVB-T (B ≈ 7.6 MHz, fc = 746 MHz, T = 0.1 s)
żono się analizą łańcuchów Markowa. W tym punkcie rezultaty teoretyczne uzyskanew wyniku tej analizy zostaną potwierdzone za pomocą symulacji komputerowych.
W pierwszym z eksperymentów przebadano średni czas inicjalizacji trasy prawdzi-wej. W tym celu zasymulowano prawdziwy obiekt, którego wektor stanu zmieniał sięzgodnie z modelem (4.18). Obiekt był wykrywany z prawdopodobieństwem Pd, którewynikało z przyjętych wartości SNR i Pfa zgodnie ze wzorem (4.10). Uzyskane wy-krycia (obarczone założonym błędem) były wykorzystywane do aktualizacji wektorastanu w filtrze Kalmana. Sekwencję wykryć analizowano za pomocą logiki „Mc/Nc”.W każdej realizacji symulację prowadzono aż do potwierdzenia trasy lub przekrocze-nia założonego maksymalnego czasu. Procedurę tę powtórzono 500 razy, a wartościczasu potwierdzenia trasy z poszczególnych realizacji uśredniono. W symulacjach nieuwzględniono fałszywych wykryć. Rezultaty otrzymane za pomocą opisanej proce-
126
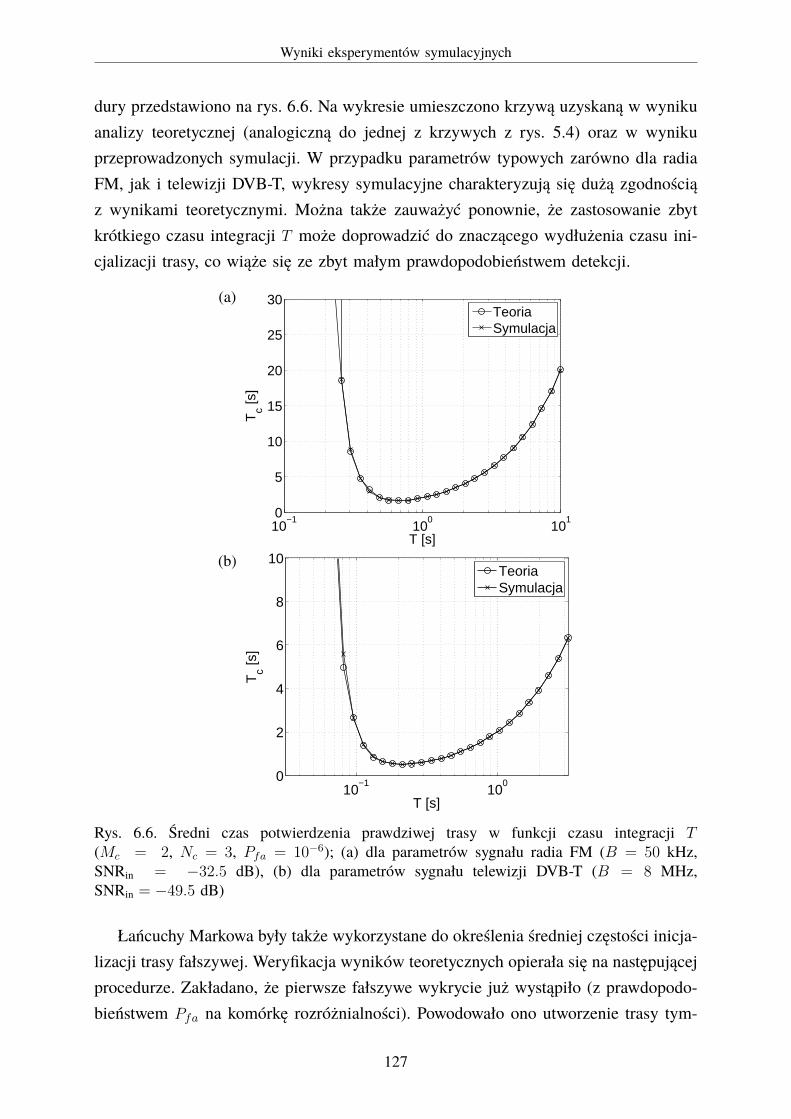
Wyniki eksperymentów symulacyjnych
dury przedstawiono na rys. 6.6. Na wykresie umieszczono krzywą uzyskaną w wynikuanalizy teoretycznej (analogiczną do jednej z krzywych z rys. 5.4) oraz w wynikuprzeprowadzonych symulacji. W przypadku parametrów typowych zarówno dla radiaFM, jak i telewizji DVB-T, wykresy symulacyjne charakteryzują się dużą zgodnościąz wynikami teoretycznymi. Można także zauważyć ponownie, że zastosowanie zbytkrótkiego czasu integracji T może doprowadzić do znaczącego wydłużenia czasu ini-cjalizacji trasy, co wiąże się ze zbyt małym prawdopodobieństwem detekcji.
(a)
10−1
100
1010
5
10
15
20
25
30
T [s]
Tc [s
]
TeoriaSymulacja
(b)
10−1
1000
2
4
6
8
10
T [s]
Tc [s
]
TeoriaSymulacja
Rys. 6.6. Średni czas potwierdzenia prawdziwej trasy w funkcji czasu integracji T(Mc = 2, Nc = 3, Pfa = 10−6); (a) dla parametrów sygnału radia FM (B = 50 kHz,SNRin = −32.5 dB), (b) dla parametrów sygnału telewizji DVB-T (B = 8 MHz,SNRin = −49.5 dB)
Łańcuchy Markowa były także wykorzystane do określenia średniej częstości inicja-lizacji trasy fałszywej. Weryfikacja wyników teoretycznych opierała się na następującejprocedurze. Zakładano, że pierwsze fałszywe wykrycie już wystąpiło (z prawdopodo-bieństwem Pfa na komórkę rozróżnialności). Powodowało ono utworzenie trasy tym-
127
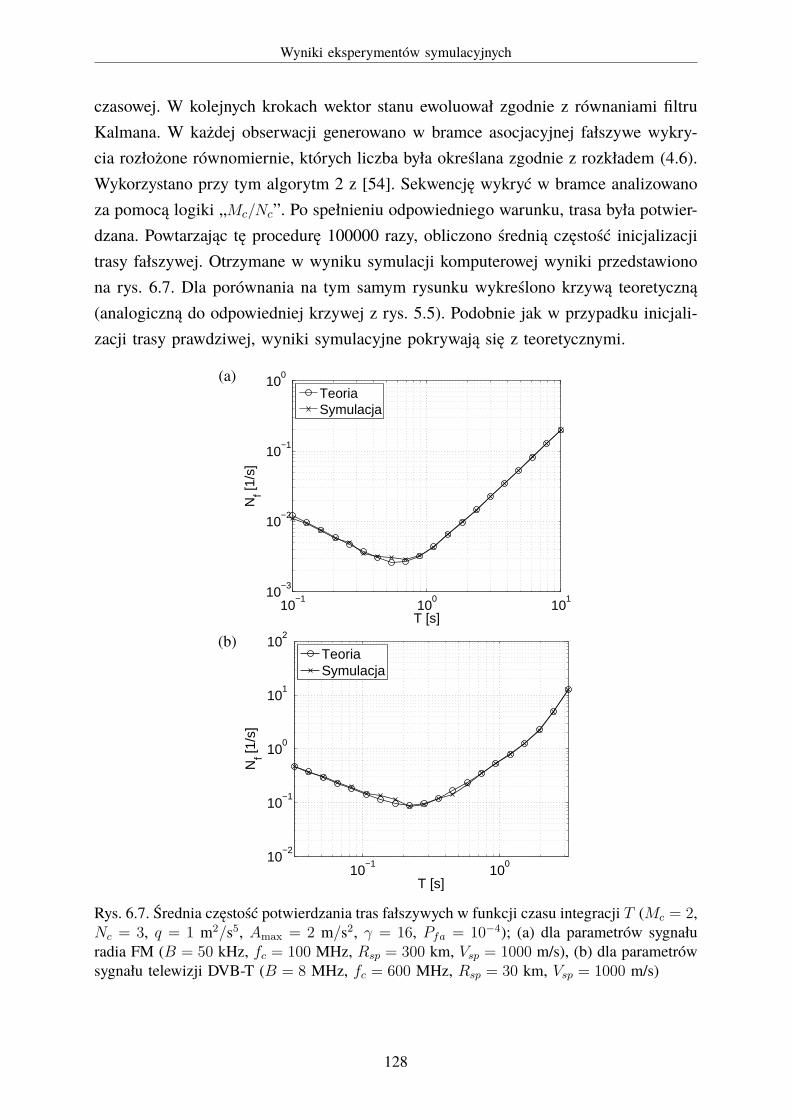
Wyniki eksperymentów symulacyjnych
czasowej. W kolejnych krokach wektor stanu ewoluował zgodnie z równaniami filtruKalmana. W każdej obserwacji generowano w bramce asocjacyjnej fałszywe wykry-cia rozłożone równomiernie, których liczba była określana zgodnie z rozkładem (4.6).Wykorzystano przy tym algorytm 2 z [54]. Sekwencję wykryć w bramce analizowanoza pomocą logiki „Mc/Nc”. Po spełnieniu odpowiedniego warunku, trasa była potwier-dzana. Powtarzając tę procedurę 100000 razy, obliczono średnią częstość inicjalizacjitrasy fałszywej. Otrzymane w wyniku symulacji komputerowej wyniki przedstawionona rys. 6.7. Dla porównania na tym samym rysunku wykreślono krzywą teoretyczną(analogiczną do odpowiedniej krzywej z rys. 5.5). Podobnie jak w przypadku inicjali-zacji trasy prawdziwej, wyniki symulacyjne pokrywają się z teoretycznymi.
(a)
10−1
100
10110
−3
10−2
10−1
100
T [s]
Nf [1
/s]
TeoriaSymulacja
(b)
10−1
10010
−2
10−1
100
101
102
T [s]
Nf [1
/s]
TeoriaSymulacja
Rys. 6.7. Średnia częstość potwierdzania tras fałszywych w funkcji czasu integracji T (Mc = 2,Nc = 3, q = 1 m2/s5, Amax = 2 m/s2, γ = 16, Pfa = 10−4); (a) dla parametrów sygnałuradia FM (B = 50 kHz, fc = 100 MHz, Rsp = 300 km, Vsp = 1000 m/s), (b) dla parametrówsygnału telewizji DVB-T (B = 8 MHz, fc = 600 MHz, Rsp = 30 km, Vsp = 1000 m/s)
128
Wyniki eksperymentów symulacyjnych
W kolejnym eksperymencie przeprowadzono analizę średniego czasu inicjalizacjitrasy prawdziwej w strukturze równoległej. Głównym celem tego eksperymentu byłowykazanie słuszności analizy teoretycznej przedstawionej w dodatku 9.2. W celu sy-mulacji inicjalizacji trasy w strukturze równoległej wygenerowano sygnał pomiarowyz echem obiektu o zadanym stosunku sygnału do szumu. Następnie ten sam sygnałzostał podzielony na bloki o długości odpowiadającej czasom integracji T w każdejz gałęzi. Potwierdzenie trasy w całej strukturze było deklarowane, jeśli w którejkolwiekgałęzi był spełniony warunek „Mc/Nc”. Procedurę powtórzono 500 razy, a zmierzoneczasy potwierdzenia trasy uśredniono. Wyniki eksperymentu przedstawiono na rys.6.8. Zbliżone wyniki symulacyjne oraz teoretyczne wskazują na poprawność analizyz dodatku 9.2, a w szczególności na uzasadnione użycie założenia przybliżającegodotyczącego niezależności potwierdzania trasy w różnych gałęziach.
6.5 Śledzenie we współrzędnych bistatycznych
Celem kolejnego eksperymentu było potwierdzenie słuszności przyjętego bista-tycznego modelu ruchu zdefiniowanego wyrażeniem (4.18). Założono przykładowyscenariusz, w którym nadajnik znajduje się na pozycji (xt, yt, zt) = (50, 50, 0) km,a odbiorniki na pozycji (xr, yr, zr) = (0, 0, 0) km. Początkowa pozycja obiektu wy-nosi [x(0), y(0), z(0)] = (−20, 30, 10) km, zaś jego wektor prędkości (Vx, Vy, Vz) =
(150, 250, 0) m/s. Przy podanych warunkach dokonano symulacji trajektorii obiektuw czasie 90 s. Rysunek 6.9 (a) przedstawia otrzymaną trajektorię we współrzędnychkartezjańskich, a rys. 6.9 (b) odpowiadającą jej trajektorię we współrzędnych bista-tycznych. Początkową pozycję zaznaczono na rysunku gwiazdką. Parametry ruchu wewspółrzędnych bistatycznych obliczano zgodnie ze wzorami (2.3) i (2.5). Wykres zrys.6.9 (b) jest dosyć typowy; w praktyce trajektoria ruchu obiektu we współrzędnych bi-statycznych poruszającego się po linii prostej często przypomina wyglądem parabolę(w rzeczywistości krzywa ta nie jest parabolą, co jest widoczne przy dłuższych czasachobserwacji).
Na rysunku 6.10 przedstawiono wynik śledzenia obiektu dla parametrów typo-wych dla radia FM i telewizji DVB-T. Założono Pd = 1, a więc obiekt był wykry-wany w każdej obserwacji. Idealną trajektorię obiektu we współrzędnych bistatycz-nych
[z rys. 6.9 (b)
]zakłócono szumem gaussowskim o odchyleniu standardowym
σR = 200 m (dla radia FM) i σR = 2 m (dla telewizji DVB-T) w przypadku odległościbistatycznej oraz σV = 0.5 m (dla radia FM i telewizji DVB-T) w przypadku prędkości
129
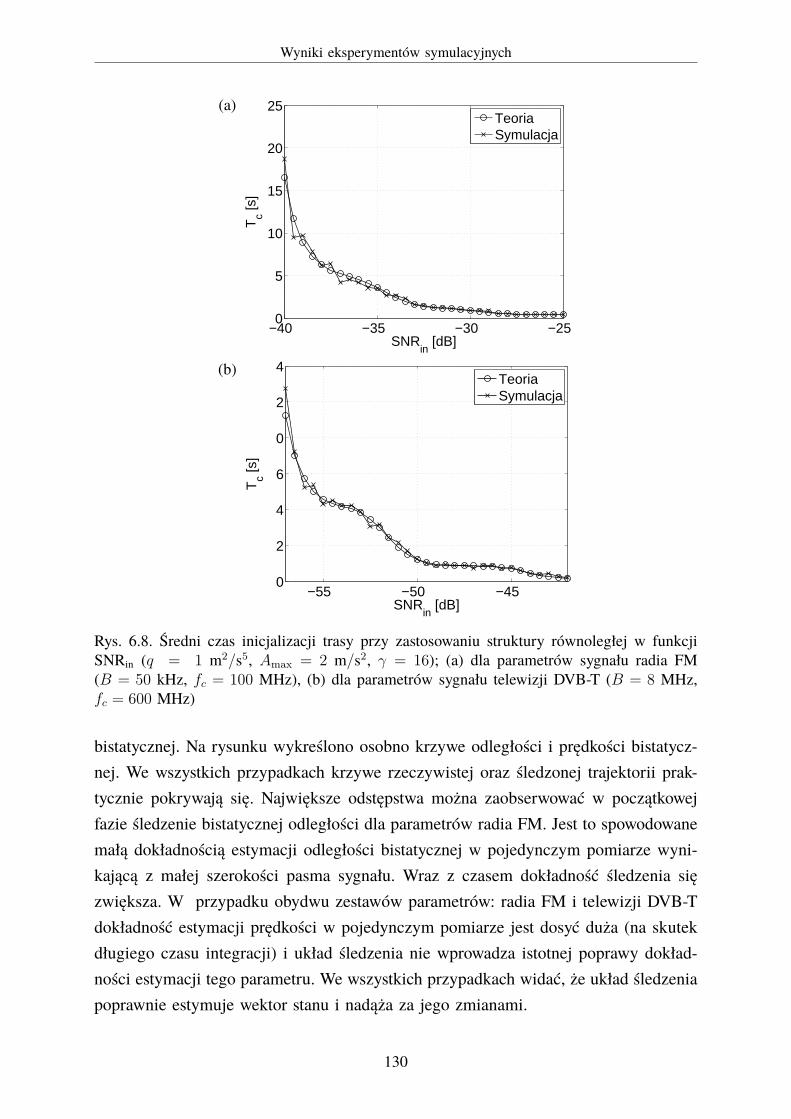
Wyniki eksperymentów symulacyjnych
(a)
−40 −35 −30 −250
5
10
15
20
25
SNRin
[dB]
Tc [s
]
TeoriaSymulacja
(b)
−55 −50 −45 0
2
4
6
0
2
4
SNRin
[dB]
Tc [s
]
TeoriaSymulacja
Rys. 6.8. Średni czas inicjalizacji trasy przy zastosowaniu struktury równoległej w funkcjiSNRin (q = 1 m2/s5, Amax = 2 m/s2, γ = 16); (a) dla parametrów sygnału radia FM(B = 50 kHz, fc = 100 MHz), (b) dla parametrów sygnału telewizji DVB-T (B = 8 MHz,fc = 600 MHz)
bistatycznej. Na rysunku wykreślono osobno krzywe odległości i prędkości bistatycz-nej. We wszystkich przypadkach krzywe rzeczywistej oraz śledzonej trajektorii prak-tycznie pokrywają się. Największe odstępstwa można zaobserwować w początkowejfazie śledzenie bistatycznej odległości dla parametrów radia FM. Jest to spowodowanemałą dokładnością estymacji odległości bistatycznej w pojedynczym pomiarze wyni-kającą z małej szerokości pasma sygnału. Wraz z czasem dokładność śledzenia sięzwiększa. W przypadku obydwu zestawów parametrów: radia FM i telewizji DVB-Tdokładność estymacji prędkości w pojedynczym pomiarze jest dosyć duża (na skutekdługiego czasu integracji) i układ śledzenia nie wprowadza istotnej poprawy dokład-ności estymacji tego parametru. We wszystkich przypadkach widać, że układ śledzeniapoprawnie estymuje wektor stanu i nadąża za jego zmianami.
130
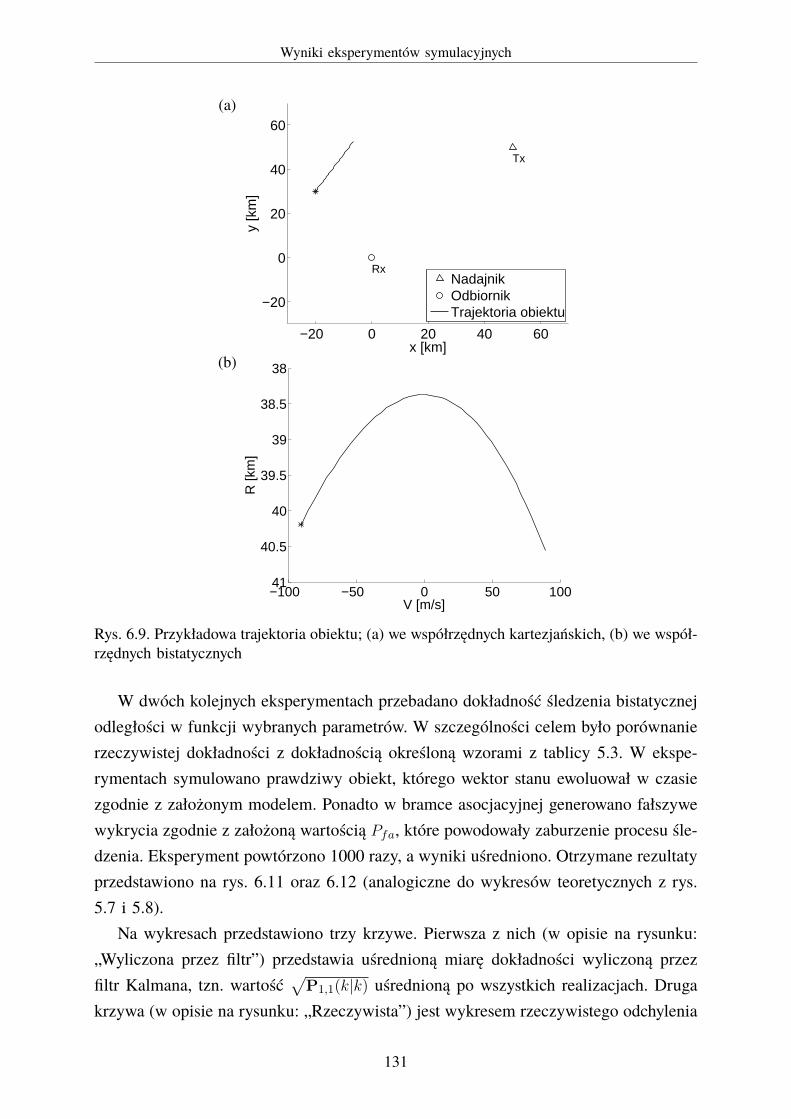
Wyniki eksperymentów symulacyjnych
(a)
−20 0 20 40 60
−20
0
20
40
60
Tx
Rx
x [km]
y [k
m]
NadajnikOdbiornikTrajektoria obiektu
(b)
−100 −50 0 50 100
38
38.5
39
39.5
40
40.5
41
V [m/s]
R [k
m]
Rys. 6.9. Przykładowa trajektoria obiektu; (a) we współrzędnych kartezjańskich, (b) we współ-rzędnych bistatycznych
W dwóch kolejnych eksperymentach przebadano dokładność śledzenia bistatycznejodległości w funkcji wybranych parametrów. W szczególności celem było porównanierzeczywistej dokładności z dokładnością określoną wzorami z tablicy 5.3. W ekspe-rymentach symulowano prawdziwy obiekt, którego wektor stanu ewoluował w czasiezgodnie z założonym modelem. Ponadto w bramce asocjacyjnej generowano fałszywewykrycia zgodnie z założoną wartością Pfa, które powodowały zaburzenie procesu śle-dzenia. Eksperyment powtórzono 1000 razy, a wyniki uśredniono. Otrzymane rezultatyprzedstawiono na rys. 6.11 oraz 6.12 (analogiczne do wykresów teoretycznych z rys.5.7 i 5.8).
Na wykresach przedstawiono trzy krzywe. Pierwsza z nich (w opisie na rysunku:„Wyliczona przez filtr”) przedstawia uśrednioną miarę dokładności wyliczoną przezfiltr Kalmana, tzn. wartość
√P1,1(k|k) uśrednioną po wszystkich realizacjach. Druga
krzywa (w opisie na rysunku: „Rzeczywista”) jest wykresem rzeczywistego odchylenia
131
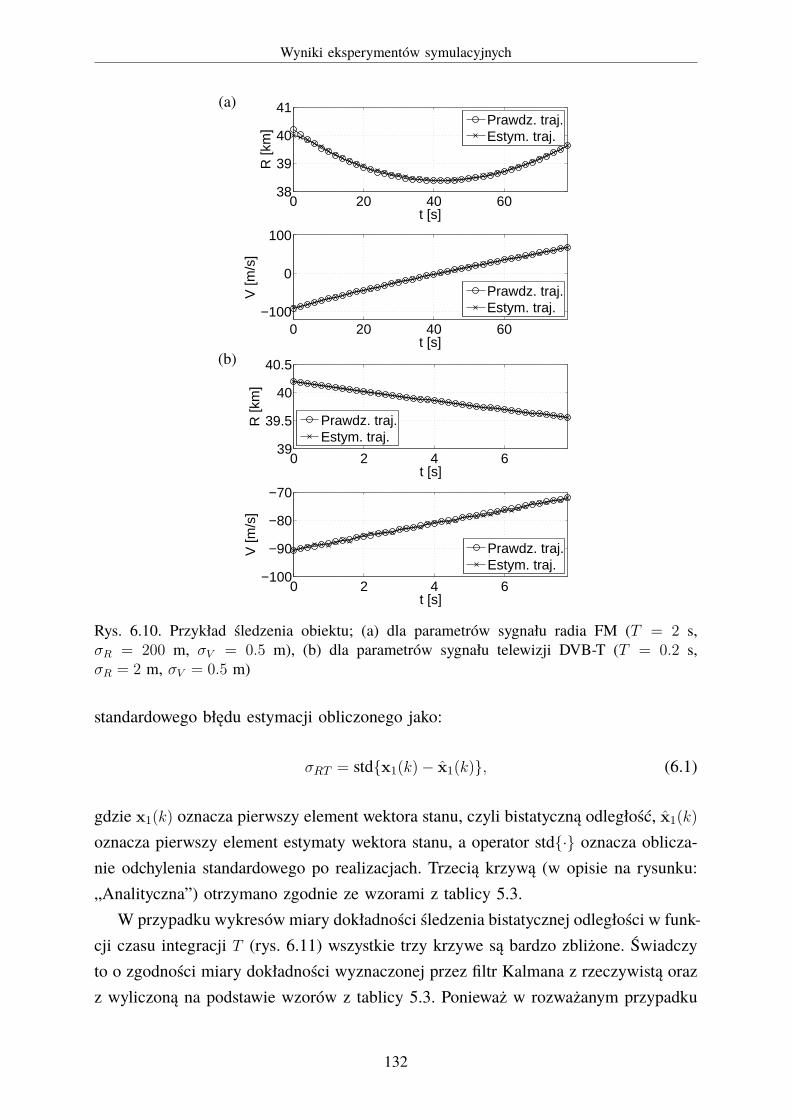
Wyniki eksperymentów symulacyjnych
(a)
0 20 40 6038
39
40
41
t [s]
R [k
m]
Prawdz. traj.Estym. traj.
0 20 40 60−100
0
100
t [s]
V [m
/s]
Prawdz. traj.Estym. traj.
(b)
0 2 4 639
39.5
40
40.5
t [s]
R [k
m]
Prawdz. traj.Estym. traj.
0 2 4 6−100
−90
−80
−70
t [s]
V [m
/s]
Prawdz. traj.Estym. traj.
Rys. 6.10. Przykład śledzenia obiektu; (a) dla parametrów sygnału radia FM (T = 2 s,σR = 200 m, σV = 0.5 m), (b) dla parametrów sygnału telewizji DVB-T (T = 0.2 s,σR = 2 m, σV = 0.5 m)
standardowego błędu estymacji obliczonego jako:
σRT = std{x1(k)− x1(k)}, (6.1)
gdzie x1(k) oznacza pierwszy element wektora stanu, czyli bistatyczną odległość, x1(k)
oznacza pierwszy element estymaty wektora stanu, a operator std{·} oznacza oblicza-nie odchylenia standardowego po realizacjach. Trzecią krzywą (w opisie na rysunku:„Analityczna”) otrzymano zgodnie ze wzorami z tablicy 5.3.
W przypadku wykresów miary dokładności śledzenia bistatycznej odległości w funk-cji czasu integracji T (rys. 6.11) wszystkie trzy krzywe są bardzo zbliżone. Świadczyto o zgodności miary dokładności wyznaczonej przez filtr Kalmana z rzeczywistą orazz wyliczoną na podstawie wzorów z tablicy 5.3. Ponieważ w rozważanym przypadku
132
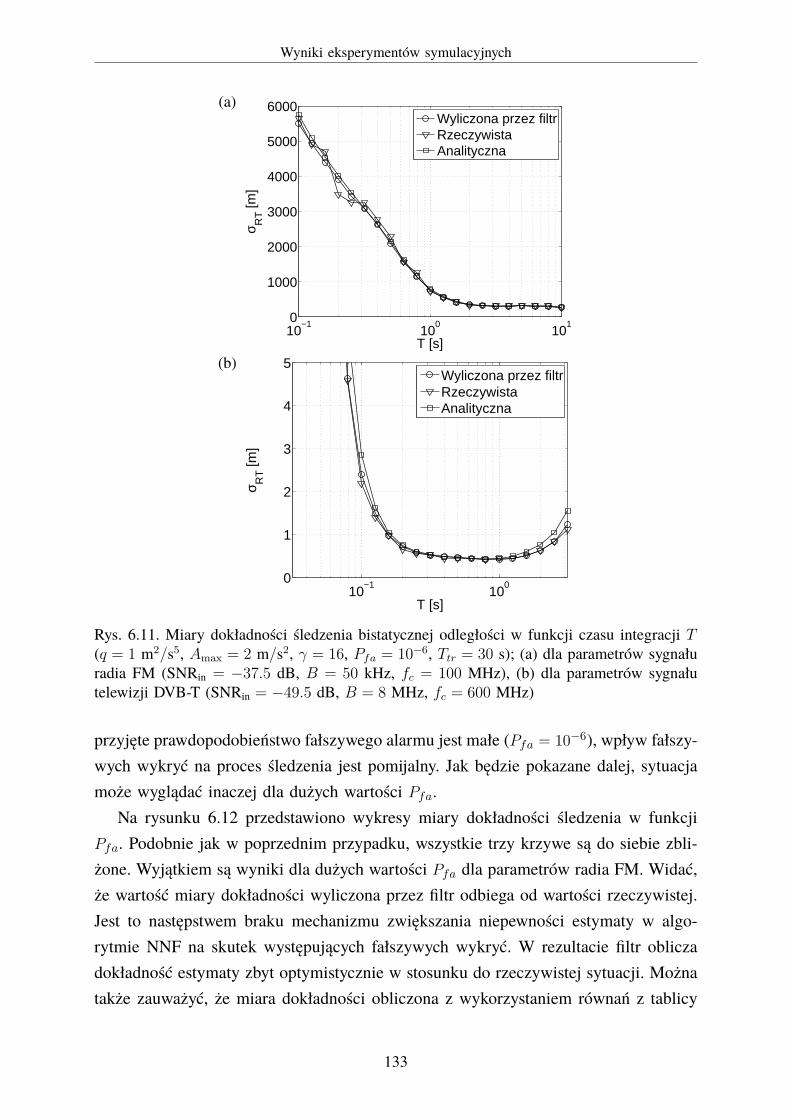
Wyniki eksperymentów symulacyjnych
(a)
10−1
100
1010
1000
2000
3000
4000
5000
6000
T [s]
σ RT [m
]
Wyliczona przez filtrRzeczywistaAnalityczna
(b)
10−1
100 0
1
2
3
4
5
T [s]
σ RT [m
]
Wyliczona przez filtrRzeczywistaAnalityczna
Rys. 6.11. Miary dokładności śledzenia bistatycznej odległości w funkcji czasu integracji T(q = 1 m2/s5, Amax = 2 m/s2, γ = 16, Pfa = 10−6, Ttr = 30 s); (a) dla parametrów sygnałuradia FM (SNRin = −37.5 dB, B = 50 kHz, fc = 100 MHz), (b) dla parametrów sygnałutelewizji DVB-T (SNRin = −49.5 dB, B = 8 MHz, fc = 600 MHz)
przyjęte prawdopodobieństwo fałszywego alarmu jest małe (Pfa = 10−6), wpływ fałszy-wych wykryć na proces śledzenia jest pomijalny. Jak będzie pokazane dalej, sytuacjamoże wyglądać inaczej dla dużych wartości Pfa.
Na rysunku 6.12 przedstawiono wykresy miary dokładności śledzenia w funkcjiPfa. Podobnie jak w poprzednim przypadku, wszystkie trzy krzywe są do siebie zbli-żone. Wyjątkiem są wyniki dla dużych wartości Pfa dla parametrów radia FM. Widać,że wartość miary dokładności wyliczona przez filtr odbiega od wartości rzeczywistej.Jest to następstwem braku mechanizmu zwiększania niepewności estymaty w algo-rytmie NNF na skutek występujących fałszywych wykryć. W rezultacie filtr obliczadokładność estymaty zbyt optymistycznie w stosunku do rzeczywistej sytuacji. Możnatakże zauważyć, że miara dokładności obliczona z wykorzystaniem równań z tablicy
133
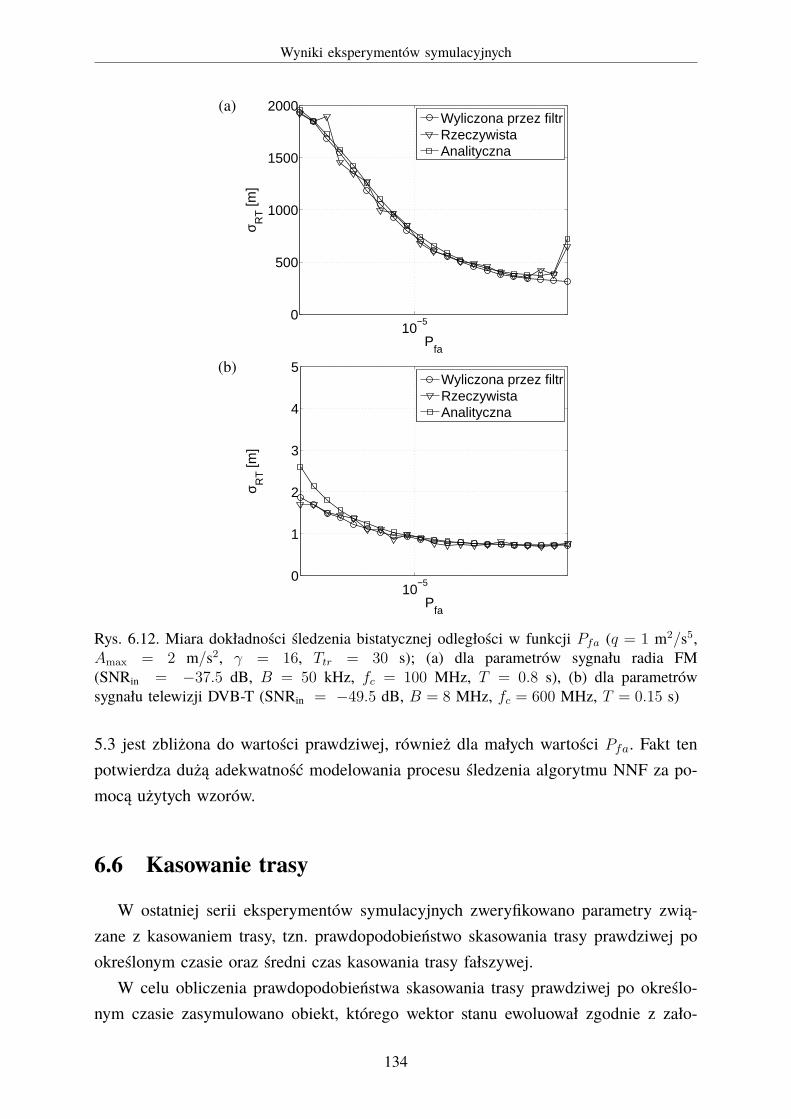
Wyniki eksperymentów symulacyjnych
(a)
10−50
500
1000
1500
2000
σ RT [m
]
Pfa
Wyliczona przez filtrRzeczywistaAnalityczna
(b)
10−5 0
1
2
3
4
5
σ RT [m
]
Pfa
Wyliczona przez filtrRzeczywistaAnalityczna
Rys. 6.12. Miara dokładności śledzenia bistatycznej odległości w funkcji Pfa (q = 1 m2/s5,Amax = 2 m/s2, γ = 16, Ttr = 30 s); (a) dla parametrów sygnału radia FM(SNRin = −37.5 dB, B = 50 kHz, fc = 100 MHz, T = 0.8 s), (b) dla parametrówsygnału telewizji DVB-T (SNRin = −49.5 dB, B = 8 MHz, fc = 600 MHz, T = 0.15 s)
5.3 jest zbliżona do wartości prawdziwej, również dla małych wartości Pfa. Fakt tenpotwierdza dużą adekwatność modelowania procesu śledzenia algorytmu NNF za po-mocą użytych wzorów.
6.6 Kasowanie trasy
W ostatniej serii eksperymentów symulacyjnych zweryfikowano parametry zwią-zane z kasowaniem trasy, tzn. prawdopodobieństwo skasowania trasy prawdziwej pookreślonym czasie oraz średni czas kasowania trasy fałszywej.
W celu obliczenia prawdopodobieństwa skasowania trasy prawdziwej po określo-nym czasie zasymulowano obiekt, którego wektor stanu ewoluował zgodnie z zało-
134
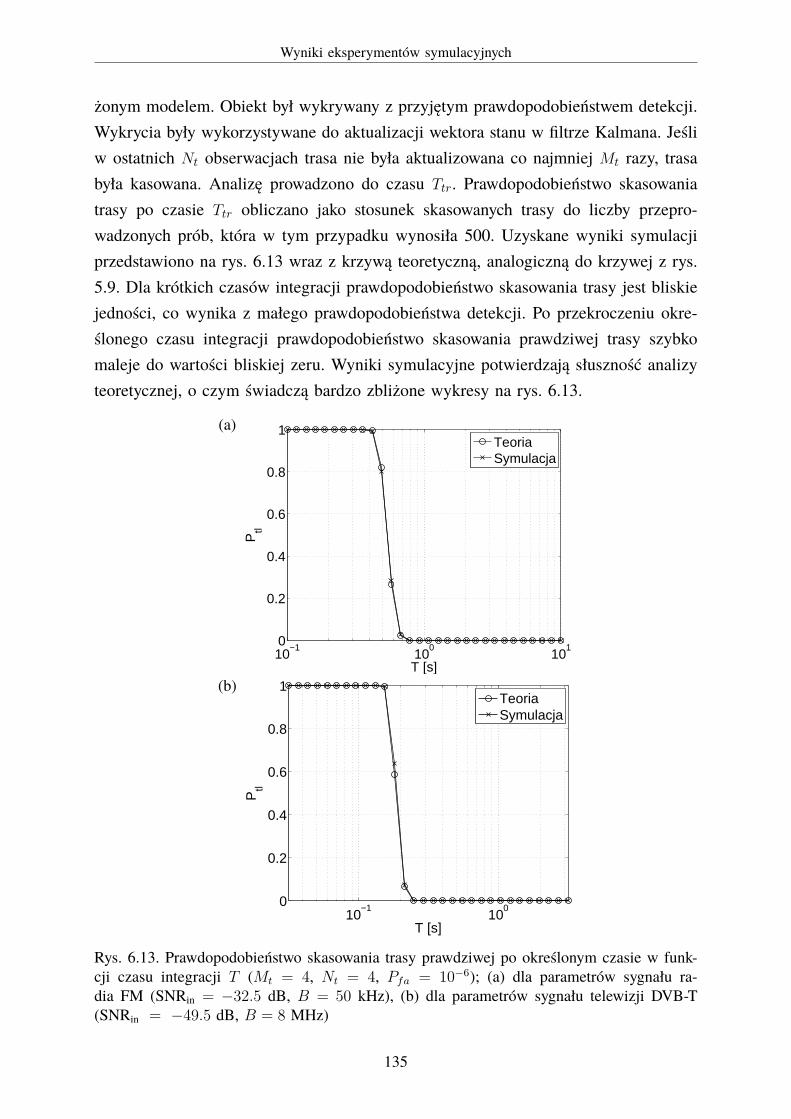
Wyniki eksperymentów symulacyjnych
żonym modelem. Obiekt był wykrywany z przyjętym prawdopodobieństwem detekcji.Wykrycia były wykorzystywane do aktualizacji wektora stanu w filtrze Kalmana. Jeśliw ostatnich Nt obserwacjach trasa nie była aktualizowana co najmniej Mt razy, trasabyła kasowana. Analizę prowadzono do czasu Ttr. Prawdopodobieństwo skasowaniatrasy po czasie Ttr obliczano jako stosunek skasowanych trasy do liczby przepro-wadzonych prób, która w tym przypadku wynosiła 500. Uzyskane wyniki symulacjiprzedstawiono na rys. 6.13 wraz z krzywą teoretyczną, analogiczną do krzywej z rys.5.9. Dla krótkich czasów integracji prawdopodobieństwo skasowania trasy jest bliskiejedności, co wynika z małego prawdopodobieństwa detekcji. Po przekroczeniu okre-ślonego czasu integracji prawdopodobieństwo skasowania prawdziwej trasy szybkomaleje do wartości bliskiej zeru. Wyniki symulacyjne potwierdzają słuszność analizyteoretycznej, o czym świadczą bardzo zbliżone wykresy na rys. 6.13.
(a)
10−1
100
1010
0.2
0.4
0.6
0.8
1
T [s]
Ptl
TeoriaSymulacja
(b)
10−1
1000
0.2
0.4
0.6
0.8
1
T [s]
Ptl
TeoriaSymulacja
Rys. 6.13. Prawdopodobieństwo skasowania trasy prawdziwej po określonym czasie w funk-cji czasu integracji T (Mt = 4, Nt = 4, Pfa = 10−6); (a) dla parametrów sygnału ra-dia FM (SNRin = −32.5 dB, B = 50 kHz), (b) dla parametrów sygnału telewizji DVB-T(SNRin = −49.5 dB, B = 8 MHz)
135

Wyniki eksperymentów symulacyjnych
Zbadanie drugiego z parametrów charakteryzujących procedurę kasowania tras, tj.średniego czasu kasowania trasy fałszywej, jest szczególnie istotne, ponieważ w analizieteoretycznej przyjęto upraszczające założenie, że wielkość bramki asocjacyjnej uzależ-niona jest tylko od sekwencji wykryć o długości Nt, natomiast nie zależy od wcześniej-szej historii. Celem przeprowadzonego eksperymentu było potwierdzenie słusznościtego założenia. W symulacjach przyjęto, że prawdziwy obiekt przestaje być widocznypo czasie Ttr. Macierz kowariancji estymaty procesu po czasie Ttr obliczono, wyko-rzystując wzory z tablicy 5.3. W kolejnych obserwacjach generowano jedynie fałszywewykrycia, zgodnie z przyjętą wartością Pfa oraz wielkością bramki asocjacyjnej. Trasabyła kasowana, gdy w ostatnich Nt obserwacjach nie była ona aktualizowana wykry-ciami przynajmniej Mt razy. Procedurę tę powtórzono 500 razy. Wyniki otrzymane nadrodze symulacji oraz wyniki teoretyczne (analogiczne do tych z rys. 5.10) przedsta-wiono na rys. 6.14. Dla małych wartości Pfa średni czas kasowania trasy praktycznieodpowiada czterem obserwacjom, czyli wynosi 8 s dla radia FM i 1.6 s dla telewi-zji DVB-T. Wynika to z zastosowanej logiki kasowania trasy „4/4” oraz znikomegowpływu fałszywych wykryć na wydłużenie czasu życia trasy. Sytuacja zmienia się dladużych wartości Pfa, gdzie często występujące fałszywe wykrycia potrafią wydłużyćczas kasowania trasy. Jak widać na rys. 6.14, wynik symulowany i teoretyczny sąbardzo zbliżone. Ponieważ w symulacjach nie stosowano żadnego uproszczenia doty-czącego wielkości bramki, potwierdza to słuszność przyjętego w analizie teoretycznejzałożenia.
136
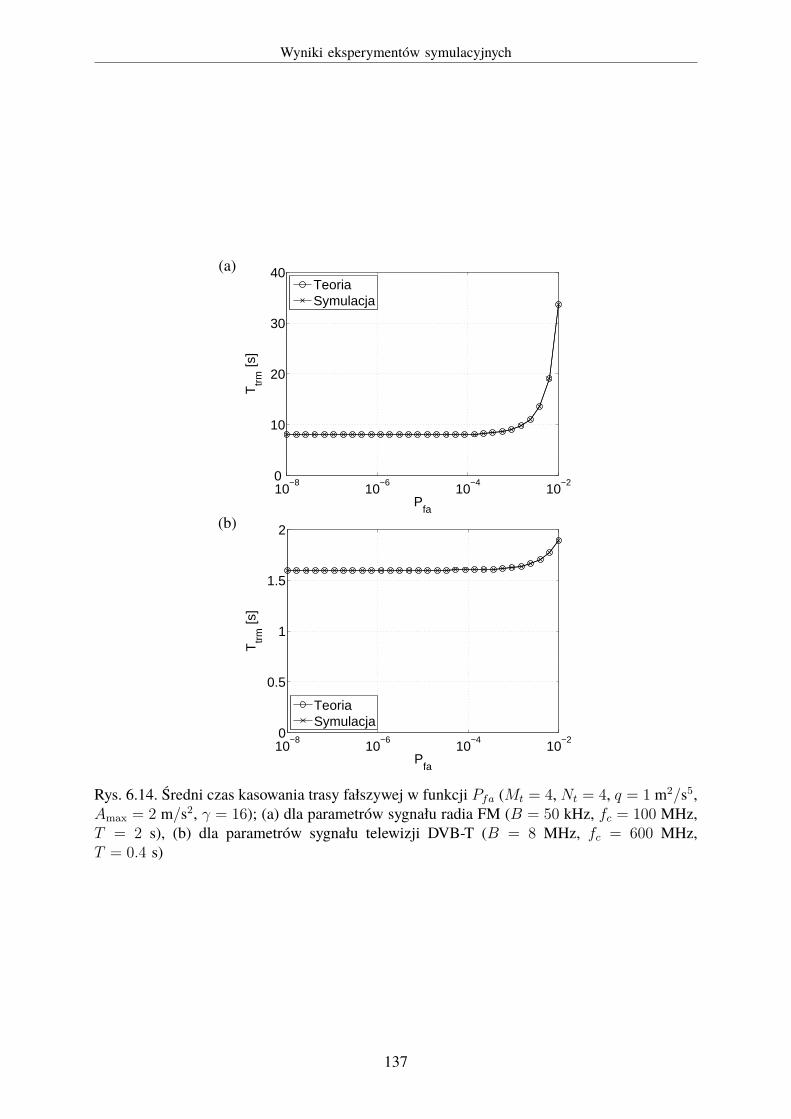
Wyniki eksperymentów symulacyjnych
(a)
10−8
10−6
10−4
10−2 0
10
20
30
40
Pfa
Ttr
m [s
]
TeoriaSymulacja
(b)
10−8
10−6
10−4
10−20
0.5
1
1.5
2
Pfa
Ttr
m [s
]
TeoriaSymulacja
Rys. 6.14. Średni czas kasowania trasy fałszywej w funkcji Pfa (Mt = 4, Nt = 4, q = 1 m2/s5,Amax = 2 m/s2, γ = 16); (a) dla parametrów sygnału radia FM (B = 50 kHz, fc = 100 MHz,T = 2 s), (b) dla parametrów sygnału telewizji DVB-T (B = 8 MHz, fc = 600 MHz,T = 0.4 s)
137
Rozdział 7
Weryfikacja zaproponowanych metod za
pomocą sygnałów rzeczywistych
7.1 Eksperymentalny system pasywny PaRaDe
Jedną z przesłanek do podjęcia badań zaprezentowanych w pracy była chęć udosko-nalenia eksperymentalnego radaru pasywnego projektowanego w Instytucie SystemówElektronicznych Politechniki Warszawskiej. Autor jest członkiem zespołu, który opra-cował koncepcję, zaprojektował, wykonał oraz udoskonalał ten system. W omawianymradarze pasywnym, nazwanym PaRaDe (ang. Passive Radar Demonstrator), wykorzy-stywane są sygnały radia FM w celu wykrywania obiektów latających [76], [47], [77],[81], [79]. W skład systemu wchodzi szyk antenowy [73], część odbiorcza [83] orazoprogramowanie służące do przetwarzania danych, pracujące na komputerze ogólnegoprzeznaczenia PC. Dzięki modułowej budowie części sprzętowej oraz programowej,system PaRaDe charakteryzuje się uniwersalnością i może być stosowany w wielukonfiguracjach. W ramach prac rozwojowych przeprowadzono próby radaru w konfi-guracji stacjonarnej, jak również na platformach ruchomych: samochodzie i samolocie[20], [49]. Opisane poniżej badania eksperymentalne z wykorzystaniem sygnałów rze-czywistych zostały przeprowadzone dla radaru PaRaDe w konfiguracji stacjonarnej.
W rozważanym przypadku posłużono się ośmioelementowym szykiem antenowymzłożonym z dipoli rozmieszczonych na okręgu o promieniu 1.2 m
[rys. 7.1 (a)
]. Zwykle
stosuje się szyki liniowe, czyli takie, w których poszczególne elementy szyku znajdująsię w jednej linii. Jest to rozwiązanie bardzo popularne, ale ma istotną wadę, któraw rozważanym zastosowaniu jest bardzo ważna. Kształt charakterystyki szyku linio-wego jest zależny od kierunku wiązki. W szczególności wiązka ulega poszerzeniu
138
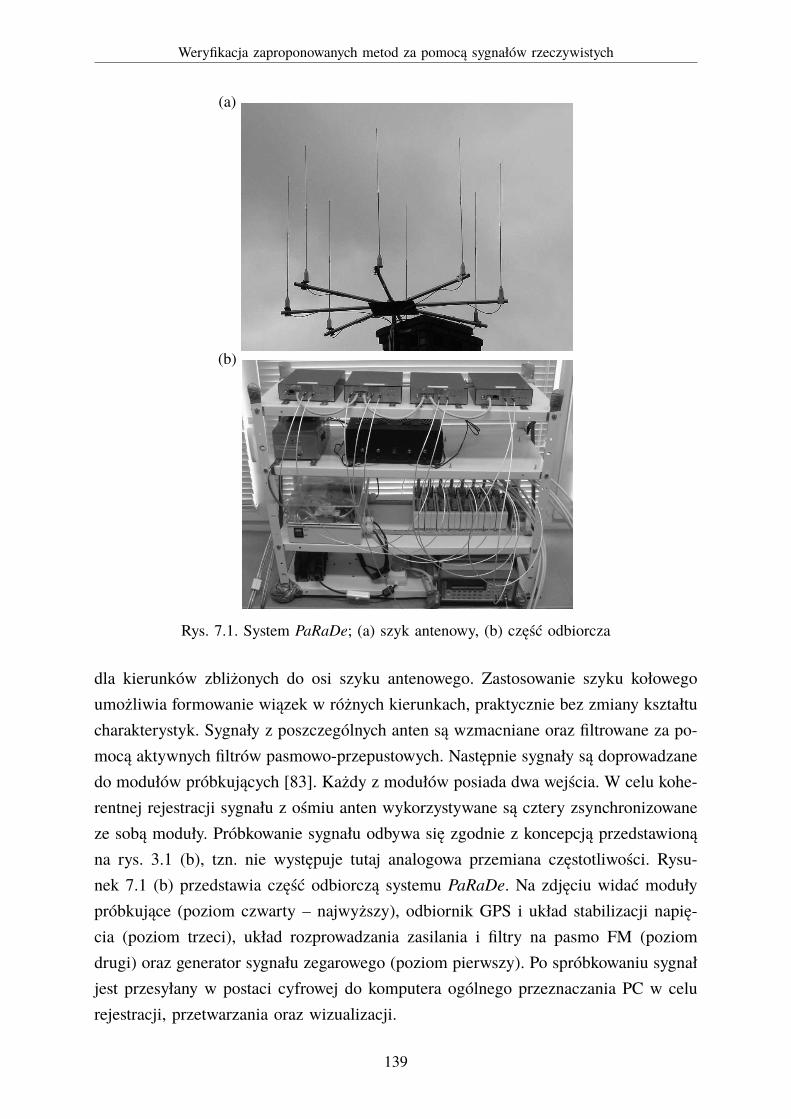
Weryfikacja zaproponowanych metod za pomocą sygnałów rzeczywistych
(a)
(b)
Rys. 7.1. System PaRaDe; (a) szyk antenowy, (b) część odbiorcza
dla kierunków zbliżonych do osi szyku antenowego. Zastosowanie szyku kołowegoumożliwia formowanie wiązek w różnych kierunkach, praktycznie bez zmiany kształtucharakterystyk. Sygnały z poszczególnych anten są wzmacniane oraz filtrowane za po-mocą aktywnych filtrów pasmowo-przepustowych. Następnie sygnały są doprowadzanedo modułów próbkujących [83]. Każdy z modułów posiada dwa wejścia. W celu kohe-rentnej rejestracji sygnału z ośmiu anten wykorzystywane są cztery zsynchronizowaneze sobą moduły. Próbkowanie sygnału odbywa się zgodnie z koncepcją przedstawionąna rys. 3.1 (b), tzn. nie występuje tutaj analogowa przemiana częstotliwości. Rysu-nek 7.1 (b) przedstawia część odbiorczą systemu PaRaDe. Na zdjęciu widać modułypróbkujące (poziom czwarty – najwyższy), odbiornik GPS i układ stabilizacji napię-cia (poziom trzeci), układ rozprowadzania zasilania i filtry na pasmo FM (poziomdrugi) oraz generator sygnału zegarowego (poziom pierwszy). Po spróbkowaniu sygnałjest przesyłany w postaci cyfrowej do komputera ogólnego przeznaczania PC w celurejestracji, przetwarzania oraz wizualizacji.
139
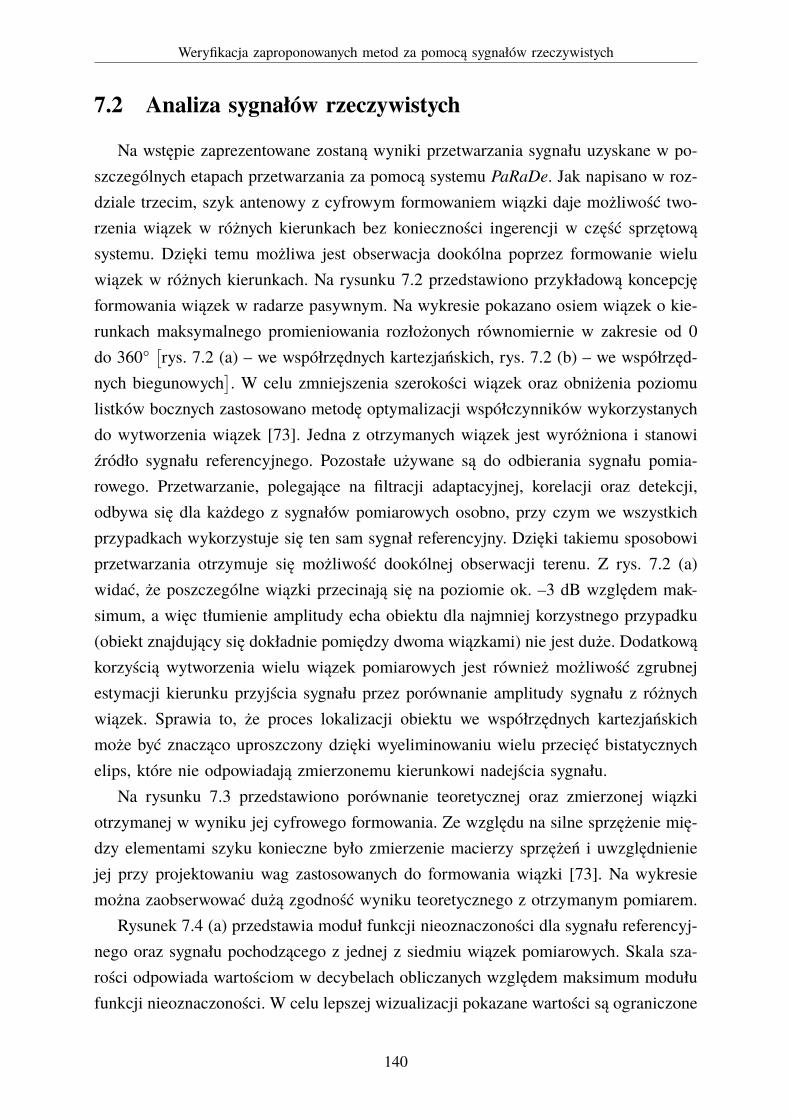
Weryfikacja zaproponowanych metod za pomocą sygnałów rzeczywistych
7.2 Analiza sygnałów rzeczywistych
Na wstępie zaprezentowane zostaną wyniki przetwarzania sygnału uzyskane w po-szczególnych etapach przetwarzania za pomocą systemu PaRaDe. Jak napisano w roz-dziale trzecim, szyk antenowy z cyfrowym formowaniem wiązki daje możliwość two-rzenia wiązek w różnych kierunkach bez konieczności ingerencji w część sprzętowąsystemu. Dzięki temu możliwa jest obserwacja dookólna poprzez formowanie wieluwiązek w różnych kierunkach. Na rysunku 7.2 przedstawiono przykładową koncepcjęformowania wiązek w radarze pasywnym. Na wykresie pokazano osiem wiązek o kie-runkach maksymalnego promieniowania rozłożonych równomiernie w zakresie od 0do 360°
[rys. 7.2 (a) – we współrzędnych kartezjańskich, rys. 7.2 (b) – we współrzęd-
nych biegunowych]. W celu zmniejszenia szerokości wiązek oraz obniżenia poziomu
listków bocznych zastosowano metodę optymalizacji współczynników wykorzystanychdo wytworzenia wiązek [73]. Jedna z otrzymanych wiązek jest wyróżniona i stanowiźródło sygnału referencyjnego. Pozostałe używane są do odbierania sygnału pomia-rowego. Przetwarzanie, polegające na filtracji adaptacyjnej, korelacji oraz detekcji,odbywa się dla każdego z sygnałów pomiarowych osobno, przy czym we wszystkichprzypadkach wykorzystuje się ten sam sygnał referencyjny. Dzięki takiemu sposobowiprzetwarzania otrzymuje się możliwość dookólnej obserwacji terenu. Z rys. 7.2 (a)widać, że poszczególne wiązki przecinają się na poziomie ok. –3 dB względem mak-simum, a więc tłumienie amplitudy echa obiektu dla najmniej korzystnego przypadku(obiekt znajdujący się dokładnie pomiędzy dwoma wiązkami) nie jest duże. Dodatkowąkorzyścią wytworzenia wielu wiązek pomiarowych jest również możliwość zgrubnejestymacji kierunku przyjścia sygnału przez porównanie amplitudy sygnału z różnychwiązek. Sprawia to, że proces lokalizacji obiektu we współrzędnych kartezjańskichmoże być znacząco uproszczony dzięki wyeliminowaniu wielu przecięć bistatycznychelips, które nie odpowiadają zmierzonemu kierunkowi nadejścia sygnału.
Na rysunku 7.3 przedstawiono porównanie teoretycznej oraz zmierzonej wiązkiotrzymanej w wyniku jej cyfrowego formowania. Ze względu na silne sprzężenie mię-dzy elementami szyku konieczne było zmierzenie macierzy sprzężeń i uwzględnieniejej przy projektowaniu wag zastosowanych do formowania wiązki [73]. Na wykresiemożna zaobserwować dużą zgodność wyniku teoretycznego z otrzymanym pomiarem.
Rysunek 7.4 (a) przedstawia moduł funkcji nieoznaczoności dla sygnału referencyj-nego oraz sygnału pochodzącego z jednej z siedmiu wiązek pomiarowych. Skala sza-rości odpowiada wartościom w decybelach obliczanych względem maksimum modułufunkcji nieoznaczoności. W celu lepszej wizualizacji pokazane wartości są ograniczone
140
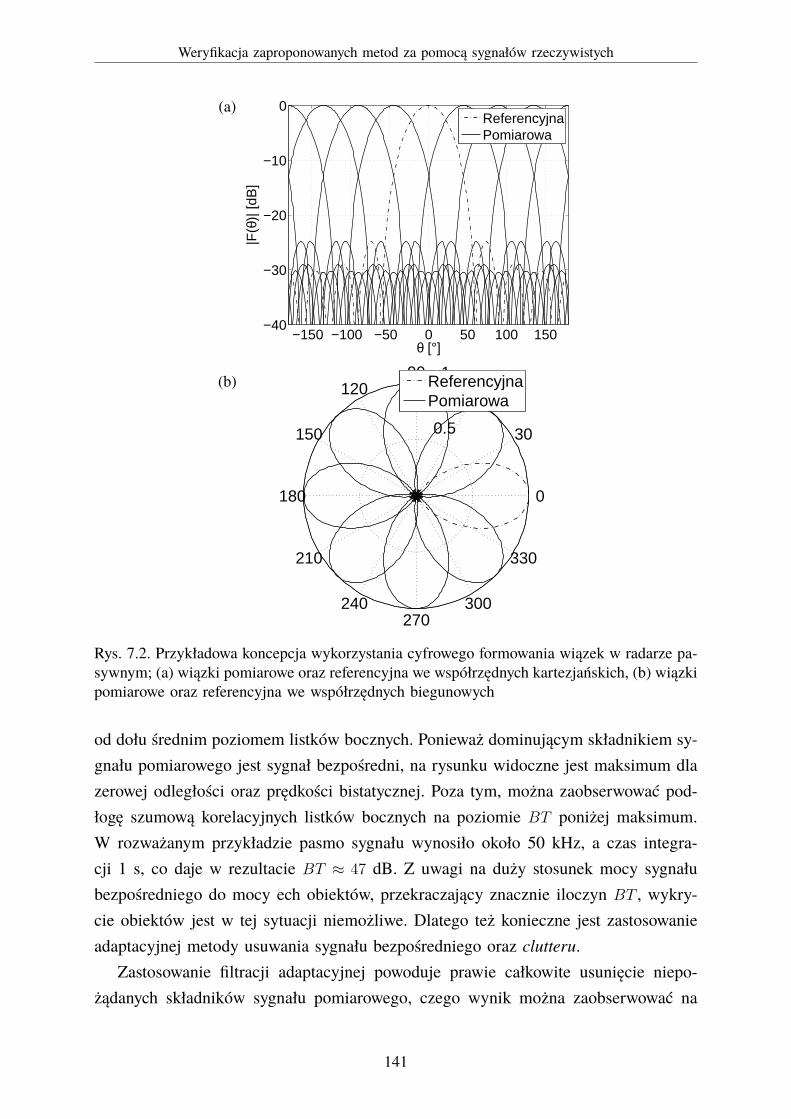
Weryfikacja zaproponowanych metod za pomocą sygnałów rzeczywistych
(a)
−150 −100 −50 0 50 100 150−40
−30
−20
−10
0
θ [°]
|F(θ
)| [d
B]
ReferencyjnaPomiarowa
(b)
0.5
1
30
210
60
240
90
270
120
300
150
330
180 0
ReferencyjnaPomiarowa
Rys. 7.2. Przykładowa koncepcja wykorzystania cyfrowego formowania wiązek w radarze pa-sywnym; (a) wiązki pomiarowe oraz referencyjna we współrzędnych kartezjańskich, (b) wiązkipomiarowe oraz referencyjna we współrzędnych biegunowych
od dołu średnim poziomem listków bocznych. Ponieważ dominującym składnikiem sy-gnału pomiarowego jest sygnał bezpośredni, na rysunku widoczne jest maksimum dlazerowej odległości oraz prędkości bistatycznej. Poza tym, można zaobserwować pod-łogę szumową korelacyjnych listków bocznych na poziomie BT poniżej maksimum.W rozważanym przykładzie pasmo sygnału wynosiło około 50 kHz, a czas integra-cji 1 s, co daje w rezultacie BT ≈ 47 dB. Z uwagi na duży stosunek mocy sygnałubezpośredniego do mocy ech obiektów, przekraczający znacznie iloczyn BT , wykry-cie obiektów jest w tej sytuacji niemożliwe. Dlatego też konieczne jest zastosowanieadaptacyjnej metody usuwania sygnału bezpośredniego oraz clutteru.
Zastosowanie filtracji adaptacyjnej powoduje prawie całkowite usunięcie niepo-żądanych składników sygnału pomiarowego, czego wynik można zaobserwować na
141
Weryfikacja zaproponowanych metod za pomocą sygnałów rzeczywistych
0 50 100 150 200 250 300 350−40
−35
−30
−25
−20
−15
−10
−5
0
|F(θ
)| [d
B]
θ [°]
TeoriaPomiar
Rys. 7.3. Teoretyczna oraz zmierzona wiązka uzyskana w wyniku procesu cyfrowego formo-wania wiązki
rys. 7.4 (b). Widać tutaj jasny pasek dla zerowej częstotliwości sięgający od zera dookoło 100 km, co jest właśnie wynikiem działania procedury usuwania sygnału bezpo-średniego oraz clutteru. Poza tym, można zaobserwować stały, niezależny od odległościi prędkości bistatycznej poziom podłogi szumowej. Na obydwu rysunkach przyjęto tęsamą skalę wartości, co pozwala stwierdzić, że poziom podłogi szumowej obniżył sięo ok. 45 dB. Dzięki temu możliwa jest detekcja obiektów oznaczonych na rysunkuelipsami. Zastosowano w tym przypadku próg detekcji 11.4 dB względem wartościśredniej podłogi szumowej, co odpowiada wartości Pfa = 10−6.
Na rysunku 7.5 pokazano rozkład prawdopodobieństwa modułu kwadratu funkcjikorelacji (3.9) po procedurze filtracji adaptacyjnej. Do analizy wybrany został fragmentfunkcji nieoznaczoności niezawierający żadnych obiektów. Ponadto, z sygnału usuniętosilne echa obiektów, które mogłyby wpłynąć na rozkład prawdopodobieństwa. Możnazatem przyjąć, że sygnał pomiarowy zawierał jedynie szum odbiorczy. Zgodnie z teo-rią, rozkład wartości kwadratu modułu funkcji nieoznaczoności powinien być opisanyfunkcją wykładniczą (4.7). Na rysunku 7.5 przedstawiono porównanie zmierzonegoi teoretycznego rozkładu. Pomiaru rozkładu prawdopodobieństwa dokonano przez ob-liczenie histogramu. W rozkładzie teoretycznym parametr skali µ dobrano jako od-wrotność średniego zmierzonego poziomu szumów. Jak widać na rysunku, występujeduża zgodność między teoretycznym i zmierzonym rozkładem prawdopodobieństwaszumów.
142
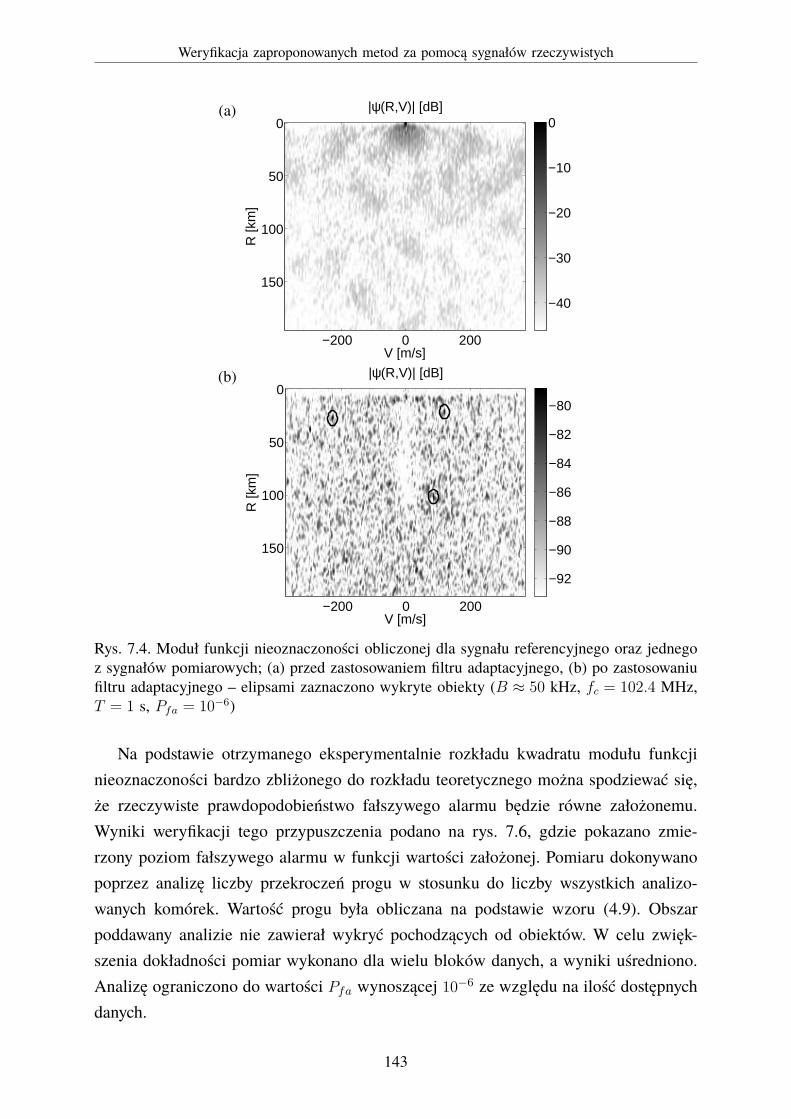
Weryfikacja zaproponowanych metod za pomocą sygnałów rzeczywistych
(a)
R [k
m]
V [m/s]
|ψ(R,V)| [dB]
−200 0 200
0
50
100
150
−40
−30
−20
−10
0
(b)
R [k
m]
V [m/s]
|ψ(R,V)| [dB]
−200 0 200
0
50
100
150
−92
−90
−88
−86
−84
−82
−80
Rys. 7.4. Moduł funkcji nieoznaczoności obliczonej dla sygnału referencyjnego oraz jednegoz sygnałów pomiarowych; (a) przed zastosowaniem filtru adaptacyjnego, (b) po zastosowaniufiltru adaptacyjnego – elipsami zaznaczono wykryte obiekty (B ≈ 50 kHz, fc = 102.4 MHz,T = 1 s, Pfa = 10−6)
Na podstawie otrzymanego eksperymentalnie rozkładu kwadratu modułu funkcjinieoznaczoności bardzo zbliżonego do rozkładu teoretycznego można spodziewać się,że rzeczywiste prawdopodobieństwo fałszywego alarmu będzie równe założonemu.Wyniki weryfikacji tego przypuszczenia podano na rys. 7.6, gdzie pokazano zmie-rzony poziom fałszywego alarmu w funkcji wartości założonej. Pomiaru dokonywanopoprzez analizę liczby przekroczeń progu w stosunku do liczby wszystkich analizo-wanych komórek. Wartość progu była obliczana na podstawie wzoru (4.9). Obszarpoddawany analizie nie zawierał wykryć pochodzących od obiektów. W celu zwięk-szenia dokładności pomiar wykonano dla wielu bloków danych, a wyniki uśredniono.Analizę ograniczono do wartości Pfa wynoszącej 10−6 ze względu na ilość dostępnychdanych.
143
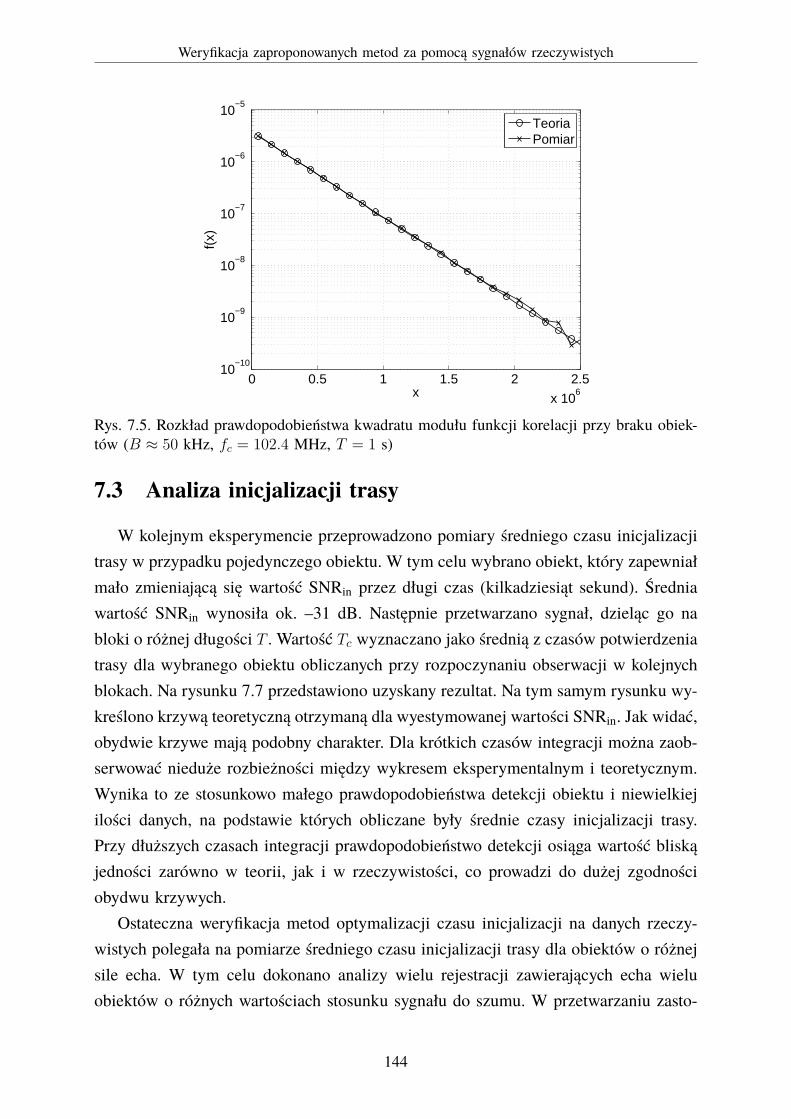
Weryfikacja zaproponowanych metod za pomocą sygnałów rzeczywistych
0 0.5 1 1.5 2 2.5
x 106
10−10
10−9
10−8
10−7
10−6
10−5
x
f(x)
TeoriaPomiar
Rys. 7.5. Rozkład prawdopodobieństwa kwadratu modułu funkcji korelacji przy braku obiek-tów (B ≈ 50 kHz, fc = 102.4 MHz, T = 1 s)
7.3 Analiza inicjalizacji trasy
W kolejnym eksperymencie przeprowadzono pomiary średniego czasu inicjalizacjitrasy w przypadku pojedynczego obiektu. W tym celu wybrano obiekt, który zapewniałmało zmieniającą się wartość SNRin przez długi czas (kilkadziesiąt sekund). Średniawartość SNRin wynosiła ok. –31 dB. Następnie przetwarzano sygnał, dzieląc go nabloki o różnej długości T . Wartość Tc wyznaczano jako średnią z czasów potwierdzeniatrasy dla wybranego obiektu obliczanych przy rozpoczynaniu obserwacji w kolejnychblokach. Na rysunku 7.7 przedstawiono uzyskany rezultat. Na tym samym rysunku wy-kreślono krzywą teoretyczną otrzymaną dla wyestymowanej wartości SNRin. Jak widać,obydwie krzywe mają podobny charakter. Dla krótkich czasów integracji można zaob-serwować nieduże rozbieżności między wykresem eksperymentalnym i teoretycznym.Wynika to ze stosunkowo małego prawdopodobieństwa detekcji obiektu i niewielkiejilości danych, na podstawie których obliczane były średnie czasy inicjalizacji trasy.Przy dłuższych czasach integracji prawdopodobieństwo detekcji osiąga wartość bliskąjedności zarówno w teorii, jak i w rzeczywistości, co prowadzi do dużej zgodnościobydwu krzywych.
Ostateczna weryfikacja metod optymalizacji czasu inicjalizacji na danych rzeczy-wistych polegała na pomiarze średniego czasu inicjalizacji trasy dla obiektów o różnejsile echa. W tym celu dokonano analizy wielu rejestracji zawierających echa wieluobiektów o różnych wartościach stosunku sygnału do szumu. W przetwarzaniu zasto-
144
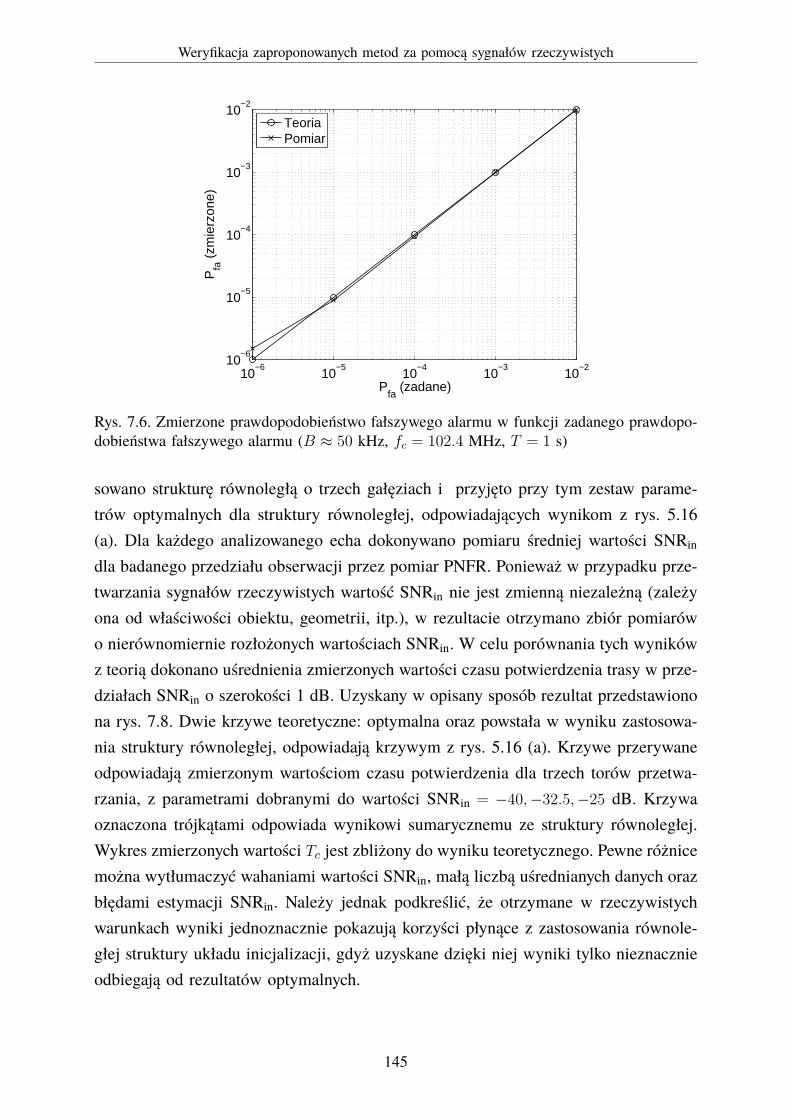
Weryfikacja zaproponowanych metod za pomocą sygnałów rzeczywistych
10−6
10−5
10−4
10−3
10−2
10−6
10−5
10−4
10−3
10−2
Pfa
(zadane)
Pfa
(zm
ierz
one)
TeoriaPomiar
Rys. 7.6. Zmierzone prawdopodobieństwo fałszywego alarmu w funkcji zadanego prawdopo-dobieństwa fałszywego alarmu (B ≈ 50 kHz, fc = 102.4 MHz, T = 1 s)
sowano strukturę równoległą o trzech gałęziach i przyjęto przy tym zestaw parame-trów optymalnych dla struktury równoległej, odpowiadających wynikom z rys. 5.16(a). Dla każdego analizowanego echa dokonywano pomiaru średniej wartości SNRin
dla badanego przedziału obserwacji przez pomiar PNFR. Ponieważ w przypadku prze-twarzania sygnałów rzeczywistych wartość SNRin nie jest zmienną niezależną (zależyona od właściwości obiektu, geometrii, itp.), w rezultacie otrzymano zbiór pomiarówo nierównomiernie rozłożonych wartościach SNRin. W celu porównania tych wynikówz teorią dokonano uśrednienia zmierzonych wartości czasu potwierdzenia trasy w prze-działach SNRin o szerokości 1 dB. Uzyskany w opisany sposób rezultat przedstawionona rys. 7.8. Dwie krzywe teoretyczne: optymalna oraz powstała w wyniku zastosowa-nia struktury równoległej, odpowiadają krzywym z rys. 5.16 (a). Krzywe przerywaneodpowiadają zmierzonym wartościom czasu potwierdzenia dla trzech torów przetwa-rzania, z parametrami dobranymi do wartości SNRin = −40,−32.5,−25 dB. Krzywaoznaczona trójkątami odpowiada wynikowi sumarycznemu ze struktury równoległej.Wykres zmierzonych wartości Tc jest zbliżony do wyniku teoretycznego. Pewne różnicemożna wytłumaczyć wahaniami wartości SNRin, małą liczbą uśrednianych danych orazbłędami estymacji SNRin. Należy jednak podkreślić, że otrzymane w rzeczywistychwarunkach wyniki jednoznacznie pokazują korzyści płynące z zastosowania równole-głej struktury układu inicjalizacji, gdyż uzyskane dzięki niej wyniki tylko nieznacznieodbiegają od rezultatów optymalnych.
145
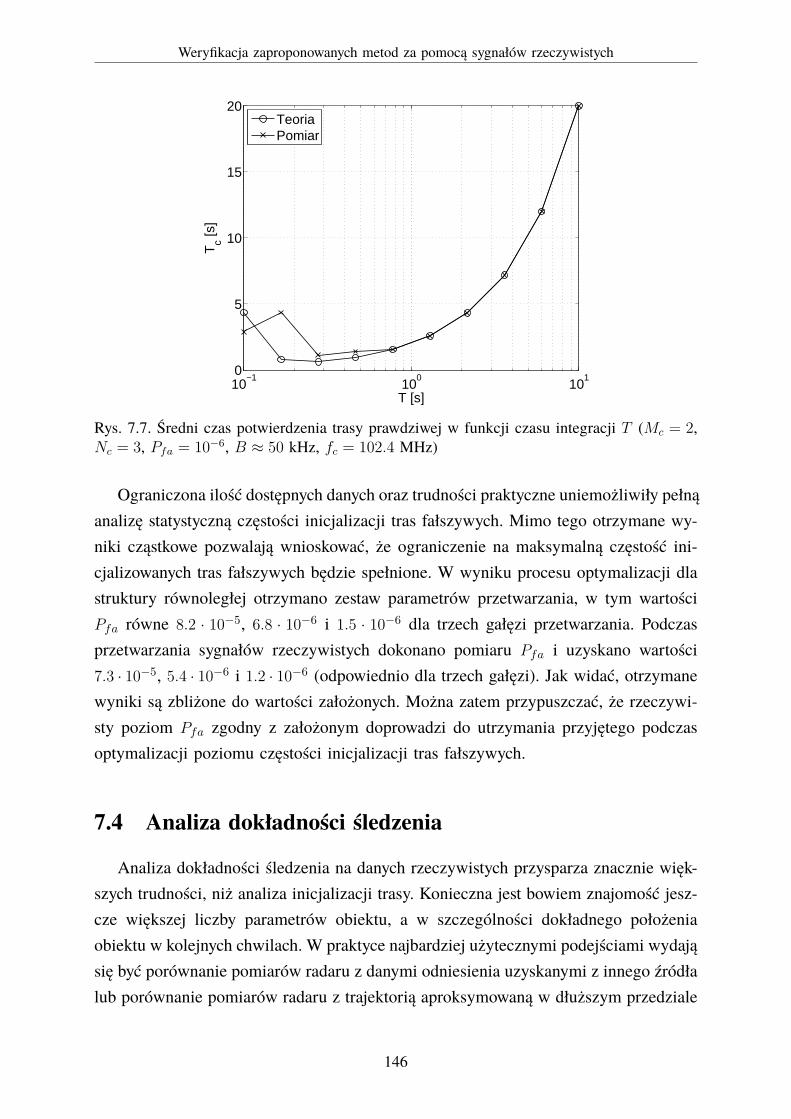
Weryfikacja zaproponowanych metod za pomocą sygnałów rzeczywistych
10−1
100
101
0
5
10
15
20
T [s]
Tc [s
]
TeoriaPomiar
Rys. 7.7. Średni czas potwierdzenia trasy prawdziwej w funkcji czasu integracji T (Mc = 2,Nc = 3, Pfa = 10−6, B ≈ 50 kHz, fc = 102.4 MHz)
Ograniczona ilość dostępnych danych oraz trudności praktyczne uniemożliwiły pełnąanalizę statystyczną częstości inicjalizacji tras fałszywych. Mimo tego otrzymane wy-niki cząstkowe pozwalają wnioskować, że ograniczenie na maksymalną częstość ini-cjalizowanych tras fałszywych będzie spełnione. W wyniku procesu optymalizacji dlastruktury równoległej otrzymano zestaw parametrów przetwarzania, w tym wartościPfa równe 8.2 · 10−5, 6.8 · 10−6 i 1.5 · 10−6 dla trzech gałęzi przetwarzania. Podczasprzetwarzania sygnałów rzeczywistych dokonano pomiaru Pfa i uzyskano wartości7.3 · 10−5, 5.4 · 10−6 i 1.2 · 10−6 (odpowiednio dla trzech gałęzi). Jak widać, otrzymanewyniki są zbliżone do wartości założonych. Można zatem przypuszczać, że rzeczywi-sty poziom Pfa zgodny z założonym doprowadzi do utrzymania przyjętego podczasoptymalizacji poziomu częstości inicjalizacji tras fałszywych.
7.4 Analiza dokładności śledzenia
Analiza dokładności śledzenia na danych rzeczywistych przysparza znacznie więk-szych trudności, niż analiza inicjalizacji trasy. Konieczna jest bowiem znajomość jesz-cze większej liczby parametrów obiektu, a w szczególności dokładnego położeniaobiektu w kolejnych chwilach. W praktyce najbardziej użytecznymi podejściami wydająsię być porównanie pomiarów radaru z danymi odniesienia uzyskanymi z innego źródłalub porównanie pomiarów radaru z trajektorią aproksymowaną w dłuższym przedziale
146
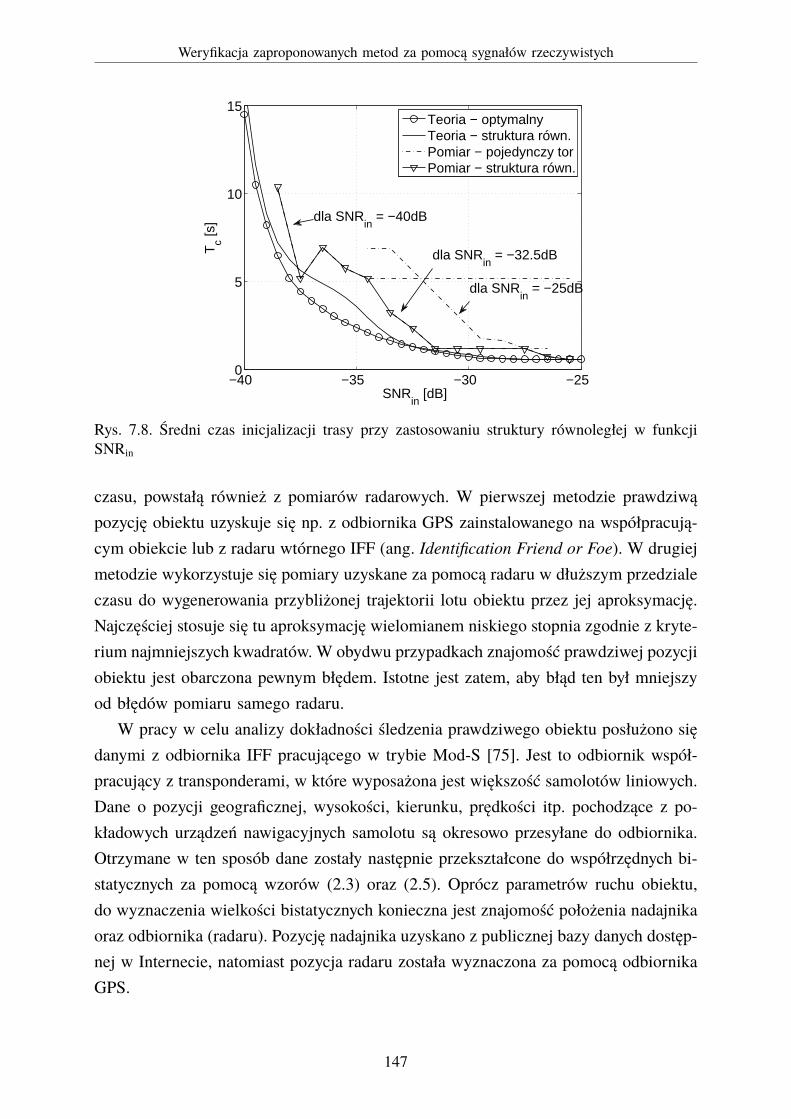
Weryfikacja zaproponowanych metod za pomocą sygnałów rzeczywistych
−40 −35 −30 −250
5
10
15
SNRin
[dB]
Tc [s
]
Teoria − optymalnyTeoria − struktura równ.Pomiar − pojedynczy torPomiar − struktura równ.
dla SNRin
= −40dB
dla SNRin
= −32.5dB
dla SNRin
= −25dB
Rys. 7.8. Średni czas inicjalizacji trasy przy zastosowaniu struktury równoległej w funkcjiSNRin
czasu, powstałą również z pomiarów radarowych. W pierwszej metodzie prawdziwąpozycję obiektu uzyskuje się np. z odbiornika GPS zainstalowanego na współpracują-cym obiekcie lub z radaru wtórnego IFF (ang. Identification Friend or Foe). W drugiejmetodzie wykorzystuje się pomiary uzyskane za pomocą radaru w dłuższym przedzialeczasu do wygenerowania przybliżonej trajektorii lotu obiektu przez jej aproksymację.Najczęściej stosuje się tu aproksymację wielomianem niskiego stopnia zgodnie z kryte-rium najmniejszych kwadratów. W obydwu przypadkach znajomość prawdziwej pozycjiobiektu jest obarczona pewnym błędem. Istotne jest zatem, aby błąd ten był mniejszyod błędów pomiaru samego radaru.
W pracy w celu analizy dokładności śledzenia prawdziwego obiektu posłużono siędanymi z odbiornika IFF pracującego w trybie Mod-S [75]. Jest to odbiornik współ-pracujący z transponderami, w które wyposażona jest większość samolotów liniowych.Dane o pozycji geograficznej, wysokości, kierunku, prędkości itp. pochodzące z po-kładowych urządzeń nawigacyjnych samolotu są okresowo przesyłane do odbiornika.Otrzymane w ten sposób dane zostały następnie przekształcone do współrzędnych bi-statycznych za pomocą wzorów (2.3) oraz (2.5). Oprócz parametrów ruchu obiektu,do wyznaczenia wielkości bistatycznych konieczna jest znajomość położenia nadajnikaoraz odbiornika (radaru). Pozycję nadajnika uzyskano z publicznej bazy danych dostęp-nej w Internecie, natomiast pozycja radaru została wyznaczona za pomocą odbiornikaGPS.
147

Weryfikacja zaproponowanych metod za pomocą sygnałów rzeczywistych
W przeciwieństwie do inicjalizacji trasy, w analizie dokładności śledzenia skupionosię wyłącznie na pojedynczym obiekcie. Wynika to przede wszystkim z różnic w pa-rametrach ruchu obiektów (manewrowości określonej przez widmową gęstość mocyszumu procesu), zmienności siły sygnału w trakcie śledzenia obiektu oraz trudnościpraktycznych w dostępności oraz przetwarzaniu danych.
W pierwszym eksperymencie porównano średnią dokładność pojedynczego po-miaru z teorią oraz wynikami symulacyjnymi. W tym celu wybrano fragment obser-wacji, w trakcie której obiekt charakteryzował się mało zmieniającą się wartością SNRrówną ok. 20 dB. Następnie obliczono odchylenie standardowe różnicy pomiędzy zmie-rzoną odległością bistatyczną oraz uzyskaną z odbiornika IFF. Wyniki przedstawionona rys. 7.9. Dwie krzywe: teoretyczna oraz uzyskana w wyniku symulacji, odpowiadająrys. 6.4 (a). Gwiazdką zaznaczono wynik pomiaru z danych rzeczywistych. Zmierzonadokładność jest nieco gorsza niż przewidywana przez teorię oraz symulacje. Może towynikać z samych błędów danych referencyjnych (pochodzących z odbiornika IFF) lubz manewrowości obiektu. Można jednak stwierdzić, że uzyskana wartość jest zbliżonado teoretycznej.
10 15 20 25 300
100
200
300
400
500
SNR [dB]
σ R [m
]
TeoriaSymulacjaPomiar
Rys. 7.9. Teoretyczne, symulowane oraz zmierzone odchylenie standardowe błędu estymacjibistatycznej odległości w pojedynczym pomiarze (B ≈ 50 kHz, fc = 91 MHz, T = 1.28 s,Pfa = 10−6)
Następnie przeprowadzono analizę dokładności śledzenia obiektu. Pojedynczy obiektbył śledzony przez okres ponad 100 s. Na rysunku 7.10 przedstawiono przebieg bi-statycznej odległość pochodzący z odbiornika IFF, surowe wykrycia oraz śledzonątrajektorię obiektu. Poziomymi liniami oznaczono również granice komórek odległo-
148
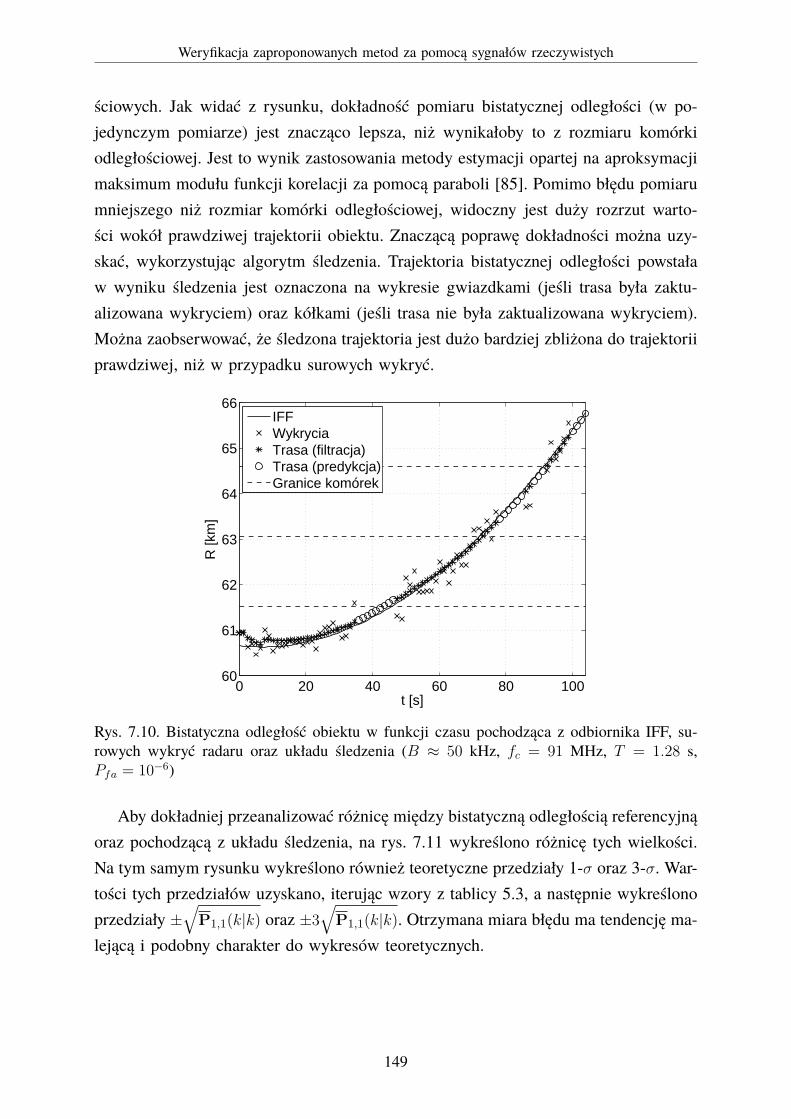
Weryfikacja zaproponowanych metod za pomocą sygnałów rzeczywistych
ściowych. Jak widać z rysunku, dokładność pomiaru bistatycznej odległości (w po-jedynczym pomiarze) jest znacząco lepsza, niż wynikałoby to z rozmiaru komórkiodległościowej. Jest to wynik zastosowania metody estymacji opartej na aproksymacjimaksimum modułu funkcji korelacji za pomocą paraboli [85]. Pomimo błędu pomiarumniejszego niż rozmiar komórki odległościowej, widoczny jest duży rozrzut warto-ści wokół prawdziwej trajektorii obiektu. Znaczącą poprawę dokładności można uzy-skać, wykorzystując algorytm śledzenia. Trajektoria bistatycznej odległości powstaław wyniku śledzenia jest oznaczona na wykresie gwiazdkami (jeśli trasa była zaktu-alizowana wykryciem) oraz kółkami (jeśli trasa nie była zaktualizowana wykryciem).Można zaobserwować, że śledzona trajektoria jest dużo bardziej zbliżona do trajektoriiprawdziwej, niż w przypadku surowych wykryć.
0 20 40 60 80 10060
61
62
63
64
65
66
t [s]
R [k
m]
IFFWykryciaTrasa (filtracja)Trasa (predykcja)Granice komórek
Rys. 7.10. Bistatyczna odległość obiektu w funkcji czasu pochodząca z odbiornika IFF, su-rowych wykryć radaru oraz układu śledzenia (B ≈ 50 kHz, fc = 91 MHz, T = 1.28 s,Pfa = 10−6)
Aby dokładniej przeanalizować różnicę między bistatyczną odległością referencyjnąoraz pochodzącą z układu śledzenia, na rys. 7.11 wykreślono różnicę tych wielkości.Na tym samym rysunku wykreślono również teoretyczne przedziały 1-σ oraz 3-σ. War-tości tych przedziałów uzyskano, iterując wzory z tablicy 5.3, a następnie wykreślonoprzedziały ±
√P1,1(k|k) oraz ±3
√P1,1(k|k). Otrzymana miara błędu ma tendencję ma-
lejącą i podobny charakter do wykresów teoretycznych.
149
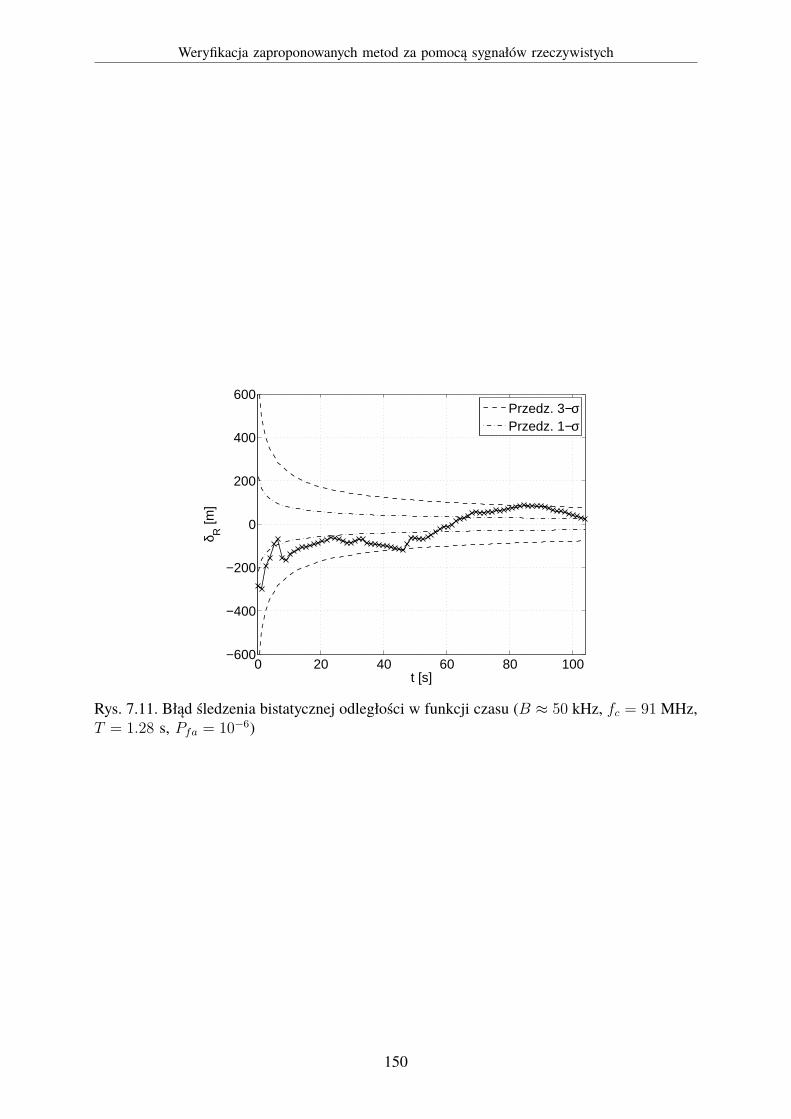
Weryfikacja zaproponowanych metod za pomocą sygnałów rzeczywistych
0 20 40 60 80 100−600
−400
−200
0
200
400
600
t [s]
δ R [m
]
Przedz. 3−σPrzedz. 1−σ
Rys. 7.11. Błąd śledzenia bistatycznej odległości w funkcji czasu (B ≈ 50 kHz, fc = 91 MHz,T = 1.28 s, Pfa = 10−6)
150
Rozdział 8
Podsumowanie i uwagi końcowe
W pracy przedstawiono metody optymalizacji wybranych parametrów radaru pa-sywnego. W tym celu przeprowadzono analizę poszczególnych etapów przetwarzaniasygnałów w radarze pasywnym. Wyprowadzenie funkcyjnych zależności między para-metrami obiektu, parametrami przetwarzania sygnału oraz osiągami systemu pozwoliłona sformułowanie określonych problemów optymalizacji.
Jako istotne wskaźniki jakości działania systemu przyjęto: średni czas inicjalizacjitrasy prawdziwej, dokładność śledzenia bistatycznej odległości (jako wielkości optyma-lizowane) oraz średnią częstość inicjalizacji trasy fałszywej, prawdopodobieństwo ska-sowania trasy prawdziwej po określonym czasie i średni czas kasowania trasy fałszywej(jako wielkości ograniczające). Przyjmując takie kryteria, uwzględniono najważniejszewskaźniki jakości śledzenia obiektu oraz wszystkie fazy życia trasy: inicjalizację, utrzy-manie oraz kasowanie.
W pracy pokazano, że w przypadku średniego czasu inicjalizacji trasy fałszywejotrzymane wyniki w dużej mierze zależą od stosunku sygnału do szumu. Równieżparametry przetwarzania sygnału, które zapewniają uzyskanie optymalnych wyników,zmieniają się znacząco wraz ze stosunkiem sygnału do szumu. W pracy zapropo-nowano zastosowanie równoległej struktury inicjalizacji tras, w której każda z gałęziprzetwarzająca sygnał wykorzystuje inne parametry. Dzięki temu można uzyskać rezul-taty zbliżone do wyników optymalnych. Przedstawiono także uproszczone podejście,w którym minimalizowany jest czas inicjalizacji trasy, uśredniony w pewnym zakresiezmian stosunku sygnału do szumu. Umożliwia to użycie jednego zestawu parametrówprzetwarzania (oraz jednego toru przetwarzania), co przy prostej konstrukcji systemuoraz małym nakładzie obliczeniowym zapewnia dobre wyniki.
W przypadku analizy dokładności śledzenia bistatycznej odległości pokazano, żewrażliwość wyników na zmianę parametrów przetwarzania nie jest duża. Dowiedziono
151
Podsumowanie i uwagi końcowe
również, iż możliwe jest dobranie jednego zestawu parametrów zapewniającego wynikibliskie optimum w szerokim zakresie zmian stosunku sygnału do szumu.
W pracy przedstawiono także łączną optymalizację średniego czasu inicjalizacjitrasy oraz dokładności śledzenia. Wykorzystanie tego podejścia umożliwia uzyska-nie parametrów przetwarzania wspólnych dla układu inicjalizacji oraz utrzymywaniatras, przy jednoczesnej kontroli osiągów systemu. Ostateczny rezultat stanowi zestawprocedur, dzięki którym projektant może wyznaczyć parametry przetwarzania sygnałuzapewniające optymalne (w określonym sensie) zachowanie się systemu.
Wybrane rezultaty analityczne zostały zweryfikowane za pomocą symulacji kompu-terowych. Pozwoliło to z jednej strony na potwierdzenie słuszności przyjętych założeń,a z drugiej pokazało poprawność analizy teoretycznej.
W ramach pacy dokonano również rejestracji i przetworzenia danych rzeczywistychz wykorzystaniem systemu PaRaDe. W celu rejestracji sygnałów radaru pasywnego na-leżało wykonać szereg zadań, w których autor brał czynny udział, a zaliczyć do nichmożna: projektowanie i konstrukcję szyku antenowego, projektowanie i konstrukcjęstanowiska do rejestracji sygnałów oraz tworzenie oprogramowania służącego do re-jestracji sygnałów. Przetwarzanie oraz analiza danych rzeczywistych wymagała m.in.opracowania i implementacji metod formowania wiązki (z uwzględnieniem sprzężeńpomiędzy elementami szyku), efektywnych metod usuwania niepożądanych składnikówz sygnału pomiarowego oraz integracji systemu z odbiornikami GPS i IFF.
Otrzymane w wyniku przetwarzania sygnałów rzeczywistych rezultaty wykazałydużą zgodność z teorią. Na uwagę zasługuje fakt, że niektóre z przedstawionych wy-ników przetwarzania sygnałów rzeczywistych nie były do tej pory prezentowane w li-teraturze światowej, np. analizy czasu inicjalizacji trasy lub dokładności śledzenia.
Do najważniejszych dokonań własnych autor zalicza:
• Analizę przetwarzania sygnałów w radarze pasywnym obejmującą korelację, de-tekcję, estymację parametrów oraz śledzenie we współrzędnych bistatycznych;
• Wyznaczenie parametrów dotyczących kasowania trasy na podstawie analizy łań-cuchów Markowa, tj. prawdopodobieństwa skasowania trasy prawdziwej po okre-ślonym czasie oraz średniego czasu kasowania trasy fałszywej;
• Sformułowanie problemów optymalizacji uwzględniających inicjalizację i kaso-wanie trasy oraz dokładność śledzenia;
152
Podsumowanie i uwagi końcowe
• Implementację numerycznych procedur do wyznaczania parametrów inicjalizacjii kasowania trasy oraz dokładności śledzenia, w tym procedury automatycznejgeneracji macierzy przejść stosowanej w analizie za pomocą łańcuchów Markowa;
• Zaproponowanie oraz analizę równoległej struktury układu inicjalizacji trasy;
• Współudział w opracowaniu pierwszego w Polsce eksperymentalnego radaru pa-sywnego PaRaDe, umożliwiającego wielokanałową koherentną rejestrację sygna-łów rzeczywistych;
• Opracowanie oprogramowania służącego do przetwarzania sygnałów radaru pa-sywnego;
• Dokonanie pomiarów rzeczywistych sygnałów radaru pasywnego;
• Analizę rzeczywistych sygnałów radaru pasywnego;
• Analizę porównawczą wyników otrzymanych z wykorzystaniem radaru pasyw-nego z wynikami pochodzącymi z innych źródeł, tj. radaru wtórnego – IFF.
Uzyskane w pracy wyniki mają znaczenie praktyczne, gdyż przyczynią się do zwięk-szenia funkcjonalności systemu PaRaDe, pierwszego w Polsce radaru pasywnego pro-jektowanego w Instytucie Systemów Elektronicznych Politechniki Warszawskiej. Opty-malny dobór parametrów pozwala na szybką oraz pewną inicjalizację trasy, dokładneśledzenie parametrów ruchu obiektu oraz poprawne kasowanie tras obiektów, które niesą w polu widzenia radaru. Aspekty te w istotny sposób określają praktyczne możli-wości radaru.
153
Rozdział 9
Dodatki
9.1 Rozkład prawdopodobieństwa wartości kwadratu mo-
dułu funkcji nieoznaczoności wzajemnej
Przy założeniu, że sygnał pomiarowy na wyjściu filtru adaptacyjnego xef (n) zwieratylko odbiorczy szum biały we(n) funkcja nieoznaczoności przyjmie następującą postać:
ψ(R, V ) =
Ns/2−1∑n=−Ns/2
we(n)x∗r
(n− Rfs
c
)exp
(−j2π V
λfsn
). (9.1)
W zależności od rodzaju wykorzystywanego sygnału referencyjnego xr(n), iloczyn podznakiem sumy będzie miał różną postać. Iloczyn ten oznaczono przez:
Xψ(n) = Xre(n) + jXim(n), (9.2)
gdzie Xψ(n) jest niezależną zespoloną zmienną losową o pewnym rozkładzie (nieko-niecznie znanym) oraz skończonej wariancji. Na mocy centralnego twierdzenia gra-nicznego [101], wraz ze wzrostem liczby próbek Ns rozkład ψ(R, V ) będzie dążył dozespolonego rozkładu normalnego. W praktyce wartości Ns sięgają setek tysięcy, coz powodzeniem upoważnia stosowanie przybliżenia wynikowego rozkładu za pomocąrozkładu normalnego.
Można zatem zapisać, że
ψ(R, V ) = Zre + jZim, (9.3)
154
Dodatki
gdzie Zre i Zim są zmiennymi o rozkładzie Gaussa o jednakowej wariancji σ2Z . W celu
detekcji obiektów oblicza się kwadrat modułu funkcji nieoznaczoności:
|ψ(R, V )|2 = Z2re + Z2
im, (9.4)
aby następnie porównać go z wyznaczonym progiem. Gdyby wariancja σ2Z równała
się 1, to zmienna losowa określona równaniem (9.4) miałaby rozkład χ2 o dwóchstopniach swobody, co jest równoważne z rozkładem wykładniczym [90]. Ponieważσ2Z może przyjmować różne wartości w zależności od odebranych sygnałów, rozkład|ψ(R, V )|2 będzie przeskalowanym rozkładem wykładniczym o postaci:
f(x) =
{0 x < 01µe− xµ x ≥ 0
, (9.5)
gdzie µ jest wartością średnią rozkładu, odpowiadającą za jego skalowanie.
9.2 Średni czas inicjalizacji trasy prawdziwej w strukturze
równoległej
W punkcie 5.4.2 wprowadzono równoległą strukturę układu inicjalizacji trasy. Po-niżej przedstawiono analizę średniego czasu inicjalizacji trasy prawdziwej w strukturzerównoległej.
Z uwagi na fakt, że w poszczególnych gałęziach wykorzystywany czas integracji Tjest inny, nie można przeprowadzić analizy w dziedzinie czasu dyskretnego, unormo-wanego względem czasu integracji. Z tego względu posłużono się reprezentacją praw-dopodobieństwa potwierdzenia trasy w dziedzinie czasu ciągłego. Przyjęto oznaczeniekumulacyjnego prawdopodobieństwa potwierdzenia trasy (osiągnięcia stanu potwier-dzenia trasy numer ic) w m-tej gałęzi µmic (t). Wielkość µmic (t) jest schodkową funkcjączasu ciągłego, w której schodki są powiązane z przyrostami prawdopodobieństwa po-twierdzenia trasy w kolejnych obserwacjach w chwilach t = k · T . Ponieważ w każdejgałęzi czas integracji T jest inny, miejsce występowania schodków w każdej gałęzibędzie inne.
Przyjmując upraszczające założenie, że potwierdzenie trasy w każdej gałęzi jestzdarzeniem niezależnym, można obliczyć kumulacyjne prawdopodobieństwo potwier-
155
Dodatki
dzenia trasy w strukturze równoległej złożonej z Kb gałęzi jako:
µic(t) = 1−Kb∏m=1
[1− µmic (t)
]. (9.6)
Prawdopodobieństwo (niekumulacyjne) potwierdzenia trasy w chwili t w strukturzerównoległej można obliczyć jako pochodną prawdopodobieństwa kumulacyjnego:
mic(t) =dµic(t)
dt. (9.7)
Ponieważ w funkcji µic(t) występują nieciągłości, pochodną z powyższego wzoru na-leży rozumieć w sensie dystrybucyjnym.
Średni czas potwierdzenia trasy prawdziwej w strukturze równoległej można wy-znaczyć następująco:
Tc =
+∞w
0
t ·mic(t)dt. (9.8)
Obliczony w ten sposób czas inicjalizacji trasy został wykorzystany przy analizie struk-tury równoległej.
156
Bibliografia
[1] B. D. O. Anderson i J. B. Moore, Filtracja Optymalna. Wydawnictwa Naukowo-Techniczne, 1984.
[2] J. Arabas, Wykłady z Algorytmów Ewolucyjnych. Wydawnictwa Naukowo-Techniczne, 2001.
[3] S. R. J. Axelsson, “Noise radar for range/Doppler processing and digital be-amforming using low-bit ADC,” IEEE Trans. Geoscience and remote sensing,vol. 41, no. 12, pp. 2703–2720, December 2003.
[4] —–, “Noise radar using random phase and frequency modulation,” IEEE Trans.Geoscience and remote sensing, vol. 42, no. 11, pp. 2370–2384, November 2004.
[5] C. J. Baker i H. D. Griffiths, “Bistatic and multistatic radar sensors for homelandsecurity,” Proc. NATO Advanced Study Institute on Advances in Sensing withSecurity Applications, Il Ciocco, Italy, 17–30 July 2005, pp. 1–22.
[6] C. J. Baker, H. D. Griffiths, i I. Papoutsis, “Passive Coherent Location radarsystems. Part 2: Waveform properties,” IEE Proc. Radar, Sonar and Navigation,vol. 152, no. 3, pp. 160–168, June 2005.
[7] Y. Bar-Shalom, L. Campo, i P. Luh, “From receiver operating characteristic tosystem operating characteristic: Evaluation of a track formation system,” IEEETrans. Automatic Control, vol. 35, no. 2, pp. 172–179, February 1990.
[8] Y. Bar-Shalom, K. C. Chang, i H. A. P. Blom, “Automatic track formation inclutter with a recursive algorithm,” Proc. 28th IEEE Conference on Decision andControl, Tampa, Florida, USA, 13–15 December 1989, pp. 1402–1408, vol. 2.
[9] Y. Bar-Shalom, K. C. Chang, i H. M. Shertukde, “Performance evaluation ofa cascaded logic for track formation in clutter,” IEEE Trans. Aerospace andElectronic Systems, vol. 25, no. 2, pp. 873–878, November 1989.
157
Bibliografia
[10] Y. Bar-Shalom i X. R. Li, “Effectiveness of the likelihood function in logic-based track formation,” IEEE Trans. Aerospace and Electronic Systems, vol. 27,no. 1, pp. 184–187, January 1991.
[11] —–, Estimation and Tracking: Principles, Techniques, and Software. ArtechHouse, 1993.
[12] —–, Multitarget-Multisensor Tracking: Principles and Techniques. Yaakov Bar-Shalom, 1995.
[13] R. Cardinali, F. Colone, i F. P. Lombardo, “Comparison of clutter and multi-path cancellation techniques for passive radar,” Proc. IEEE Radar Conference,Boston, Massachusetts, USA, 17–20 April 2007, pp. 469–474.
[14] F. R. Castella, “Sliding window detection probabilities,” IEEE Trans. Aerospaceand Electronic Systems, vol. 12, no. 6, pp. 815–819, November 1976.
[15] M. Cherniakov, D. Nezlin, i K. Kubik, “Air target detection via bistatic radarbased on LEOs communication signals,” IEE Proc. Radar, Sonar and Navigation,vol. 149, no. 1, pp. 33–38, February 2002.
[16] C. Coleman i H. Yardley, “Passive bistatic radar based on target illuminationsby Digital Audio Broadcasting,” IEE Proc. Radar, Sonar and Navigation, vol. 2,no. 5, pp. 366–375, October 2008.
[17] T. F. Coleman i Y. Li, “On the convergence of reflective Newton methods forlarge-scale nonlinear minimization subject to bounds,” Mathematical Program-ming, vol. 67, no. 2, pp. 189–224, October 1994.
[18] —–, “An interior, trust region approach for nonlinear minimization subject tobounds,” SIAM Journal on Optimization, vol. 6, pp. 418–445, May 1996.
[19] F. Colone i R. C. P. Lombardo, “Cancellation of clutter and multipath in passiveradar using a sequential approach,” Proc. IEEE Radar Conference, Verona, NewYork, USA, 24–27 April 2006, pp. 393–399.
[20] B. Dawidowicz i K. Kulpa, “Experimental results from PCL radar on movingplatform,” Proc. International Radar Symposium 2008, Wrocław, Poland, 21–23May 2008, pp. 305–308.
158
Bibliografia
[21] J. Dezert i T. Kirubarajan, “Track formation in clutter using a bi-band imagingsensor,” Proc. 3rd International Conference on Information Fusion – FUSION,Paris, France, 10–13 July 2000, pp. TUD2/24–TUD2/32, vol. 1.
[22] G. Fabrizio, F. Colone, P. Lombardo, i A. Farina, “Passive radar in the HighFrequency band,” Proc. RadarCon, Rome, Italy, 26–30 May 2008, p. CD.
[23] A. Farina i F. A. Studer, Radar Data Processing. Research Studies Press Ltd.,1985.
[24] T. Fortmann, Y. Bar-Shalom, M. Scheffe, i S. Gelfand, “Detection thresholdsfor tracking in clutter – a connection between estimation and signal processing,”IEEE Trans. on Automatic Control, vol. 30, no. 3, pp. 221–229, March 1985.
[25] T. E. Fortmann, Y. Bar-Shalom, M. Scheffe, i S. Gelfand, “Detection thresholdsfor multi-target tracking in clutter,” Proc. IEEE Conf. Decision and Controlincluding the Symposium on Adaptive Processes, San Diego, California, USA,16–18 December 1981, pp. 1401–1408, vol. 20.
[26] S. B. Gelfand, T. E. Fortmann, i Y. Bar-Shalom, “Adaptive detection thresholdoptimization for tracking in clutter,” IEEE Trans. Aerospace and Electronic Sys-tems, vol. 32, no. 2, pp. 514–523, April 1996.
[27] M. Glende, “PCL-signal-processing for sidelobe reduction in case of periodi-cal illuminator signals,” Proc. International Radar Symposium 2006, Cracow,Poland, 24–26 May 2006, pp. 229–232.
[28] D. Gould, R. Pollard, C. Sarno, i P. Tittenso, “A multiband passive radar de-monstrator,” Proc. International Radar Symposium 2006, Cracow, Poland, 24–26May 2006, pp. 657–660.
[29] H. D. Griffiths, “From a different perspective: Principles, practice and potentialof bistatic radar,” Proc. International Conference on Radar, Adelaide, Australia,3–5 September 2003, pp. 1–7.
[30] H. D. Griffiths i C. J. Baker, “Passive Coherent Location radar systems. Part1: Performance prediction,” IEE Proc. Radar, Sonar and Navigation, vol. 152,no. 3, pp. 153–159, June 2005.
[31] H. D. Griffiths, C. J. Baker, J. Baubert, N. Kitchen, i M. Treagust, “Bistatic radarusing satellite-borne illuminators,” Proc. International Conference on Radar,Edinburgh, UK, 15–17 October 2002, pp. 1–5.
159
Bibliografia
[32] H. D. Griffiths, C. J. Baker, H. Ghaleb, R. Ramakrishnan, i E. Willman, “Measu-rement and analysis of ambiguity functions of off-air signals for Passive CoherentLocation,” Electronics Letters, vol. 39, no. 13, pp. 1005–1007, June 2003.
[33] H. D. Griffiths i N. R. W. Long, “Television-based bistatic radar,” IEE Proc.Communications, Radar and Signal Processing, vol. 133, no. 7, pp. 649–657,December 1986.
[34] S. Haykin, Adaptive Filter Theory, 3rd ed. Prentice Hall, 1996.
[35] X. He, M. Cherniakov, i T. Zeng, “Signal detectability in SS-BSAR with GNSSnon-cooperative transmitter,” IEE Proc. Radar, Sonar and Navigation, vol. 152,no. 3, pp. 124–132, June 2005.
[36] S. Herman i P. Moulin, “A particle filtering approach to FM-band passive radartracking and automatic target recognition,” Proc. IEEE Aerospace Conference2002, Big Sky, Montana, USA, 9–16 March, pp. 4–1789–4–1808, vol. 4.
[37] R. D. Hippenstiel, Detection Theory. CRC Press, 2002.
[38] P. E. Howland, “Target tracking using television-based bistatic radar,” IEE Proc.Radar, Sonar and Navigation, vol. 146, no. 3, pp. 166–174, June 1999.
[39] P. E. Howland, D. Maksimiuk, i G. Reitsma, “FM radio based bistatic radar,”IEE Proc. Radar, Sonar and Navigation, vol. 152, no. 3, pp. 107–115, June2005.
[40] R. J. James, “A history of radar,” IEE Review, vol. 35, no. 9, pp. 343–349,October 1989.
[41] R. E. Kalman, “A new approach to linear filtering and prediction problems,”Trans. of the ASME–Journal of Basic Engineering, vol. 82, pp. 35–45, 1960.
[42] D. J. Kershaw i R. J. Evans, “Optimal waveform selection for tracking systems,”IEEE Trans. on Information Theory, vol. 40, no. 5, pp. 1536–1550, September1994.
[43] V. Koch i R. Westphal, “New approach to a multistatic passive radar sensor forair/space defense,” IEEE AES Systems Magazine, vol. 10, no. 11, pp. 24–32,November 1995.
[44] K. Kulpa, “Ground clutter suppression in noise radar,” Proc. International Con-ference on Radar, Tuluse, France, 18–22 October 2004, p. CD.
160
Bibliografia
[45] —–, “Simple sea clutter canceller for noise radar,” Proc. International RadarSymposium 2006, Cracow, Poland, 24–26 May 2006, pp. 299–302.
[46] K. Kulpa i Z. Czekała, “Masking effect and its removal in PCL radar,” IEE Proc.Radar, Sonar and Navigation, vol. 152, no. 3, pp. 174––178, June 2005.
[47] K. Kulpa i M. Malanowski, “Simple COTS PCL demonstrator,” Proc. 5th Multi-National Passive Covert Radar Conference, Shrivenham, UK, 13–15 November2006, p. CD.
[48] —–, “The concept of simple MIMO PCL radar,” Proc. European Radar Confe-rence – EURAD, Amsterdam, The Netherlands, 30–31 October 2008, pp. 240–243.
[49] K. Kulpa, M. Malanowski, J. Misiurewicz, M. Mordzonek, P. Samczyński, iM. Smolarczyk, “Airborne PCL radar: the concept and primary results,” Proc.Military Radar 2008, Amsterdam, The Netherlands, 27–29 October 2008, p. CD.
[50] H. Kuschel, M. Glende, J. Heckenbach, S. Müller, J. Schell, i C. Schumacher,“Experimental passive radar systems using digital illuminators (DAB/DVB),”Proc. International Radar Symposium 2007, Cologne, Germany, 5–7 September2007, pp. 411–417.
[51] A. D. Lallo, A. Farina, R. Fulcoli, P. Genovesi, R. Lalli, i R. Mancinelli, “Design,development and test on real data of an FM based prototypical passive radar,”Proc. RadarCon, Rome, Italy, 26–30 May 2008, p. CD.
[52] D. Lerro i Y. Bar-Shalom, “Interacting Multiple Model tracking with targetamplitude feature,” IEEE Trans. Aerospace and Electronic Systems, vol. 29,no. 2, pp. 494–509, April 1993.
[53] S. Li, H. Wan, H. Yin, i Y. Huang, “Detection of moving target in FM broadcast-based passive radar,” Proc. Int. Conf. on Wireless Communications, Networkingand Mobile Computing – WiCom 2007, Shanghai, China, 21–25 September 2007,pp. 649–652.
[54] X. R. Li, “Generation of random points uniformly distributed in hyperellipso-ids,” Proc. 1st IEEE Conf. Control Applications, Dayton, Ohio, USA, 13–16September 1992, pp. 654–658, vol. 2.
161

Bibliografia
[55] —–, “The PDF of nearest neighbor measurement and a Probabilistic NearestNeighbor Filter for tracking in clutter,” Proc. 32nd IEEE Conference on Decisionand Control, San Antonio, Texas, USA, 15–17 December 1993, pp. 918–923,vol. 1.
[56] X. R. Li i Y. Bar-Shalom, “Stability evaluation and track life of the PDAFfor tracking in clutter,” Proc. 29th IEEE Conference on Decision and Control,Honolulu, Hawaii, USA, 5–7 December 1990, pp. 2264–2269, vol. 4.
[57] —–, “Performance prediction of the Interacting Multiple Model algorithm,”IEEE Trans. Aerospace and Electronic Systems, vol. 29, no. 3, pp. 755–771,July 1993.
[58] —–, “Detection threshold selection for tracking performance optimization,”IEEE Trans. Aerospace and Electronic Systems, vol. 30, no. 3, pp. 742–749,July 1994.
[59] —–, “Theoretical analysis and performance prediction of tracking in clutter withStrongest Neighbor Filters,” Proc. 34th Conference on Decision and Control,New Orleans, Louisiana, USA, 13–15 December 1995, pp. 2758–2763.
[60] —–, “Tracking in clutter with Nearest Neighbor Filters: analysis and perfor-mance,” IEEE Trans. Aerospace and Electronic Systems, vol. 32, no. 3, pp.995–1010, July 1996.
[61] X. R. Li i V. P. Jilkov, “A survey of maneuvering target tracking: Dynamicmodels,” IEEE Trans. Aerospace and Electronic Systems, vol. 39, no. 4, pp.1333–1364, October 2003.
[62] F. D. Lind, J. D. Sahr, i D. M. Gidner, “First passive radar observations ofauroral E-region irregularities,” Goephysical Research Letters, vol. 26 (14), pp.2155–2158, 15 July 1999.
[63] P. Liu i J. Liu, “Analysis of passive targets detection using CDMA signal,” Proc.of 2005 IEEE International Workshop on VLSI Design and Video Technology,Suzhou, China, 28–30 May 2005, pp. 408–410.
[64] M. Malanowski, “Comparison of adaptive methods for clutter removal in PCLradar,” Proc. International Radar Symposium 2006, Cracow, Poland, 24–26 May2006, pp. 237–240.
162
Bibliografia
[65] —–, “Influence of integration time on tracking performance in PCL radar,”Proc. SPIE – Photonics Applications in Astronomy, Communications, Industry,and High-Energy Physics Experiments IV, Jachranka, Poland, 24–26 May 2007,pp. 69 372Z–1–69 372Z–8, vol. 6937.
[66] —–, “Optymalizacja przetwarzania sygnałów w radarach z pasywną koherentnąlokalizacją obiektów,” IX Seminarium z cyklu Radiokomunikacja i Techniki Mul-timedialne, Warszawa, Polska, 3 grudnia 2008, pp. 45–54.
[67] —–, “An algorithm for 3D target localization from passive radar measurements,”Proc. Signal Processing Symposium, Jachranka, Poland, 28–30 May 2009, p. CD.
[68] —–, “Śledzenie obiektów w radarze pasywnym,” Elektronika – Konstrukcje,Technologie, Zastosowania, sierpień 2009, (artykuł zaakceptowany do publika-cji).
[69] M. Malanowski, K.Kulpa, i J.Misiurewicz, “Techniki formowania wiązek w ra-diolokacji pasywnej,” Przegląd Telekomunikacyjny – Wiadomości Telekomuni-kacyjne, vol. 6, pp. 360–363, czerwiec 2009.
[70] M. Malanowski i K. Kulpa, “Optimization of confirmation time of bistatic trackin passive radar,” IEEE Trans. Aerospace and Electronic Systems, (artykuł zgło-szony do publikacji).
[71] —–, “Acceleration estimation for Passive Coherent Location radar,” Proc. Ra-darCon, Rome, Italy, 26–30 May 2008, p. CD.
[72] —–, “Analysis of integration gain in passive radar,” Proc. International Confe-rence on Radar, Adelaide, Australia, 2–5 September 2008, p. CD.
[73] —–, “Digital beamforming for Passive Coherent Location radar,” Proc. Radar-Con, Rome, Italy, 26–30 May 2008, p. CD.
[74] —–, “Analysis of bistatic tracking accuracy in passive radar,” Proc. RadarCon,Pasadena, California, USA, 4–8 May 2009, p. CD.
[75] —–, “Experimental analysis of passive radar accuracy,” Proc. International Ra-dar Symposium 2009, Hamburg, Germany, 9–11 September 2009, (artykuł za-akceptowany do publikacji).
163
Bibliografia
[76] M. Malanowski, K. Kulpa, i J. Misiurewicz, “Koncepcja radaru PCL bazującegona sygnałach radia FM,” Biuletyn Wojskowej Akademii Technicznej, vol. LVI,no. 2, pp. 283–289, 2007, Warszawa, Polska.
[77] —–, “PaRaDe – Passive Radar Demonstrator family development at WarsawUniversity of Technology,” Proc. Microwaves, Radar and Remote Sensing, Kiev,Ukraine, 22–24 September 2008, p. CD.
[78] M. Malanowski, K. Kulpa, J. Misiurewicz, i M. Purchla, “Silent police radar,”Proc. International Workshop on Intelligent Transportation, Hamburg, Germany,14–15 March, pp. 117–122.
[79] M. Malanowski, K. Kulpa, M. Mordzonek, i P. Samczynski, “PaRaDe – recon-figurable software defined passive radar,” NATO Specialist Meeting SET-136,Lisbon, Portugal, 23–25 June 2009, p. CD.
[80] M. Malanowski, K. Kulpa, i R. Suchożebrski, “Two-stage tracking algorithmfor passive radar,” Proc. 12th International Conference on Information Fusion –FUSION, Seattle, Washington, USA, 6–9 July 2009, (artykuł zaakceptowany dopublikacji).
[81] M. Malanowski, G. Mazurek, K. Kulpa, i J. Misiurewicz, “FM based PCL radardemonstrator,” Proc. International Radar Symposium 2007, Cologne, Germany,5–7 September 2007, pp. 431–435.
[82] E. Mazor, A. Averbuch, Y. Bar-Shalom, i J. Dayan, “Interacting Multiple Modelmethods in target tracking: A survey,” IEEE Trans. Aerospace and ElectronicSystems, vol. 34, no. 1, pp. 103–123, January 1998.
[83] G. Mazurek, M. Malanowski, i K. Kulpa, “Flexible hardware platform for so-ftware radio experiments,” Proc. SPIE – Photonics Applications in Astronomy,Communications, Industry, and High-Energy Physics Experiments IV, Jachranka,Poland, 24–26 May 2007, pp. 69 373X–1–69 373X–8, vol. 6937.
[84] M. Meyer i J. D. Sahr, “Passive coherent scatter radar interferometer: Imple-mentation, observations, and analysis,” Radio Science, vol. 39, May 2004.
[85] M. Nałęcz i K. Kulpa, “Range and azimuth estimation using raw data in DSP-based radar system,” Proc. International Conference on Microwaves and Radar– MIKON, Cracow, Poland, 24–26 May 1998, pp. 871–875.
164
Bibliografia
[86] B. D. Nordwall, “ ’Silent Sentry’ a new type of radar,” Aviation Week and SpaceTechnology, no. 30, pp. 70–71, 1998.
[87] D. W. O’Hagan, C. J. Baker, i H. D. Griffiths, “Signal and interference analysis:Proposed analogue signal suppression techniques for PCL radar,” Proc. EuropeanRadar Conference – EURAD, Manchester, UK, 13–15 September 2006, pp. 296–298.
[88] S. J. Orfanidis, Electromagnetic Waves and Antennas. Sophocles J. Orfanidis,2008.
[89] P. Z. Peebles, Radar Principles. John Wiley and Sons, Inc., 1998.
[90] A. Plucińska i E. Pluciński, Probabilistyka. Wydawnictwa Naukowo-Techniczne,2000.
[91] D. Poullin i M. Flecheux, “Recent progress in Passive Coherent Location (PCL)concepts and techniques in France,” Proc. RadarCon, Rome, Italy, 26–30 May2008, p. CD.
[92] C. Rago, P. Willett, i Y. Bar-Shalom, “Detection-tracking performance withcombined waveforms,” IEEE Trans. Aerospace and Electronic Systems, vol. 34,no. 2, pp. 612–624, April 1998.
[93] M. A. Richards, Fundamentals of Radar Signal Processing. McGraw-Hill, 2005.
[94] S. R. Rogers, “Diffusion analysis of track loss in clutter,” IEEE Trans. Aerospaceand Electronic Systems, vol. 27, no. 2, pp. 380–387, March 1991.
[95] —–, “Mean track life and track ‘half-life’ in Nearest-Neighbor tracking,” Proc.30th IEEE Conference on Decision and Control, Brighton, UK, 11–13 December1991, pp. 2038–2042, vol. 2.
[96] R. Rytel-Andrianik, “Estymacja parametrów ruchu obiektów wykrywanych przezradar FMCW,” Rozprawa doktorska, Politechnika Warszawska, 2005.
[97] R. Saini i M. Cherniakov, “DTV signal ambiguity function analysis for radarapplication,” IEE Proc. Radar, Sonar and Navigation, vol. 152, no. 3, pp. 133–142, June 2005.
[98] R. Saini, M. Cherniakov, i V. Lenive, “Direct path interference suppression inbistatic system: DTV based radar,” Proc. International Conference on Radar,Adelaide, Australia, 3–5 September 2003, pp. 309–314.
165
Bibliografia
[99] M. I. Skolnik, Radar Handbook, 2nd ed. McGraw-Hill, 1990.
[100] —–, Introduction to Radar Systems. McGraw-Hill, 2003.
[101] N. W. Smirnow i I. W. Dunin-Barkowski, Kurs Rachunku Prawdopodobieństwai Statystyki Matematycznej dla Zastosowań Technicznych. Państwowe Wydaw-nictwo Naukowe, 1969.
[102] T. L. Song, D. G. Lee, i J. Ryu, “A Probabilistic Nearest Neighbor Filter algo-rithm for tracking in a clutter environment,” Signal Processing, vol. 85, no. 10,pp. 2044–2053, October 2005.
[103] H. Sun-Mog, R. J. Evans, i S. Han-Seop, “Optimization of waveform and de-tection threshold for range and range-rate tracking in clutter,” IEEE Trans. Ae-rospace and Electronic Systems, vol. 41, no. 1, pp. 17–33, January 2005.
[104] D. K. P. Tan, H. Sun, Y. Lu, M. Lesturgie, i H. L. Chan, “Passive radar usingGlobal System for Mobile communication signal: theory, implementation andmeasurements,” IEE Proc. Radar, Sonar and Navigation, vol. 152, no. 3, pp.116–123, June 2005.
[105] M. Tobias i A. D. Lanterman, “Probability hypothesis density-based multitargettracking with bistatic range and Doppler observations,” IEE Proc. Radar, Sonarand Navigation, vol. 152, no. 3, pp. 195–205, June 2005.
[106] T. Tsao, M. Slamani, P. Varshney, D. Weiner, H. Schwarzlander, i S. Borek,“Ambiguity function for a bistatic radar,” IEEE Trans. Aerospace and ElectronicSystems, vol. 33, no. 3, pp. 1041–1051, July 1997.
[107] K. Wang, R. Tao, Y. Ma, i T. Shan, “Adaptive multipath cancellation algorithm inpassive radar,” Proc. CIE International Conference on Radar, Shanghai, China,16–19 October 2006, p. CD.
166








![Rozprawa Doktorska - Doktoraty Wydziału IET [start]doktoraty.iet.agh.edu.pl/_media/2014:wpop:dr-tex-test.pdfRozprawa Doktorska Algorytmy stadne w optymalizacji problemu przepływowego](https://img.pdfslide.net/doc/110x75/5edd65b9ad6a402d66687962/rozprawa-doktorska-doktoraty-wydziau-iet-start-wpopdr-tex-testpdf-rozprawa.jpg)




















