Embed Size (px)
Citation preview
Sachin Kumar Porandla
Advisor
Dr. Wenzhong Gao
Optimization of Hybrid Powertrain using DIRECT Algorithm
POWERTRAIN DESIGN GROUP MEETING #5
Page 2 of 14Intelligent Powertrain Design
Outline
• What is Optimization
• Local and Global Optimization
• Optimization Process
• Optimization Tools and Algorithms
• DIRECT algorithm
• Problem statement
• Results
Page 3 of 14Intelligent Powertrain Design
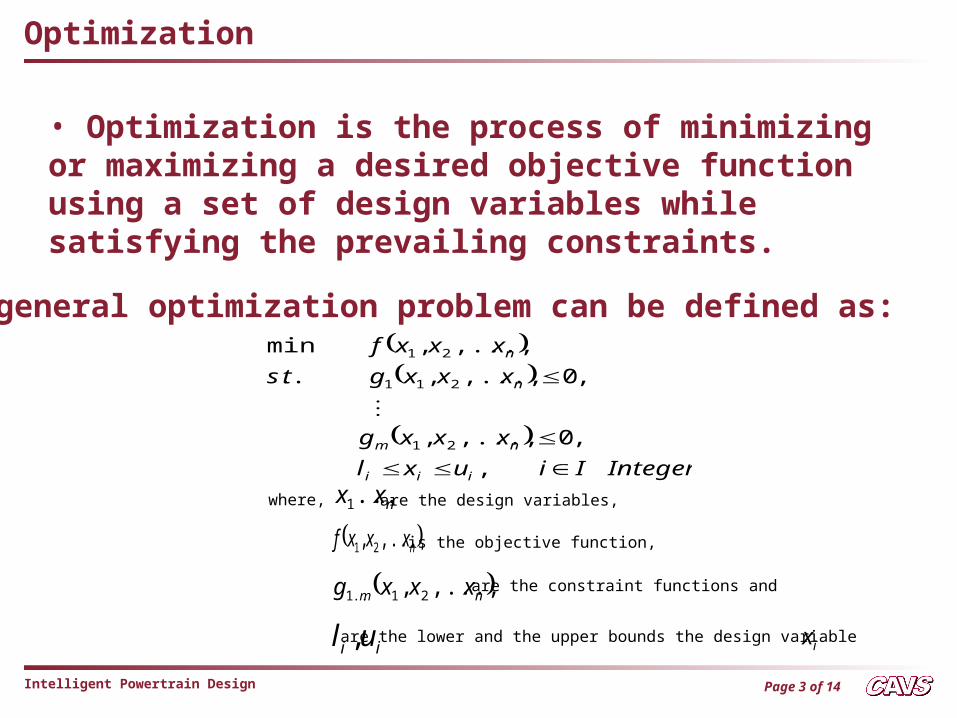
Optimization
• Optimization is the process of minimizing or maximizing a desired objective function using a set of design variables while satisfying the prevailing constraints.
IntegerIiuxl
xxxg
xxxgts
xxxf
iii
nm
n
n
,
,0,...,,
,0,...,,..
,...,,min
21
211
21
nxx ...1
nxxxf ,...,, 21
nm xxxg ,...,, 21..1
ii ul , ix
A general optimization problem can be defined as:
where, are the design variables,
is the objective function,
are the constraint functions and
are the lower and the upper bounds the design variable
Page 4 of 14Intelligent Powertrain Design
• Constraints• Acceleration ( 0 – 60 mph ≤ 11.2, 40- 60 mph: <= 4.4s,..etc)
• Gradeability ( ≥ 6.5% grade at 55 mph)
• Other Constraints ( difference in SOC ≤ 5% or final SOC > Initial SOC etc..)
Optimization contd…
• Objective function• Maximize fuel economy
• Minimize emissions or weight or cost etc..
• Maximize Performance limits
• Design Variables• power ratings of vehicle components ( ICE, motor, battery)
• Control strategy parameters
• Other variables ( drive ratio, battery SOC, mass of the vehicle, weight, cost…)
•The optimization problem tries to minimize/maximize the objective function by searching the multidimensional parameter space for the various combinations of the design variables and selecting the best combination at each iteration.
Page 5 of 14Intelligent Powertrain Design
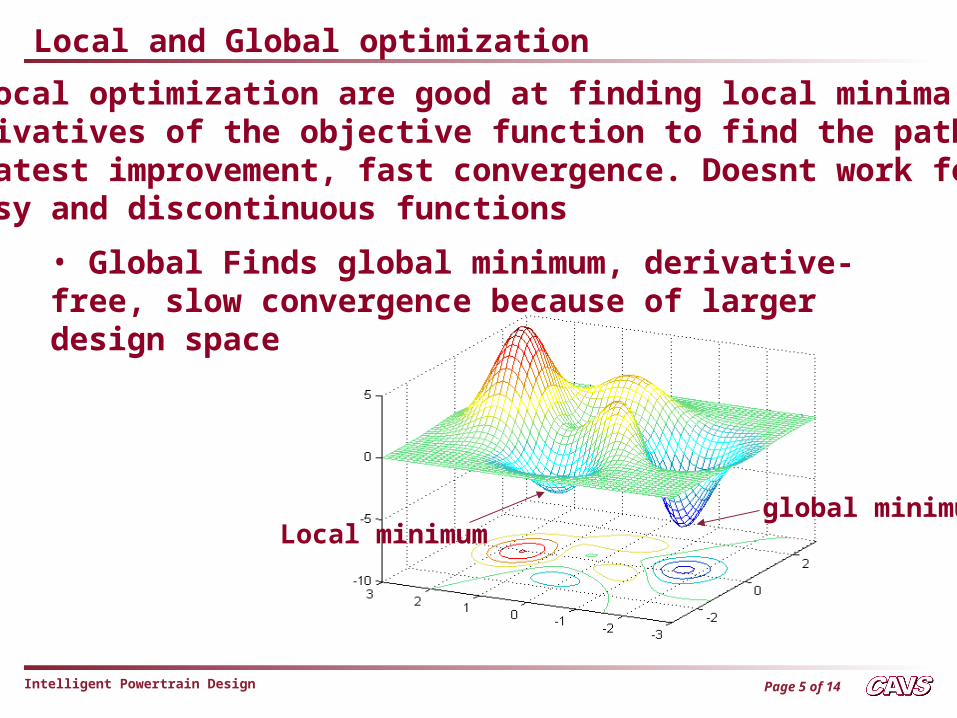
Local minimumglobal minimum
Local and Global optimization
• Local optimization are good at finding local minima, useDerivatives of the objective function to find the path ofgreatest improvement, fast convergence. Doesnt work fornoisy and discontinuous functions
• Global Finds global minimum, derivative-free, slow convergence because of larger design space
Page 6 of 14Intelligent Powertrain Design
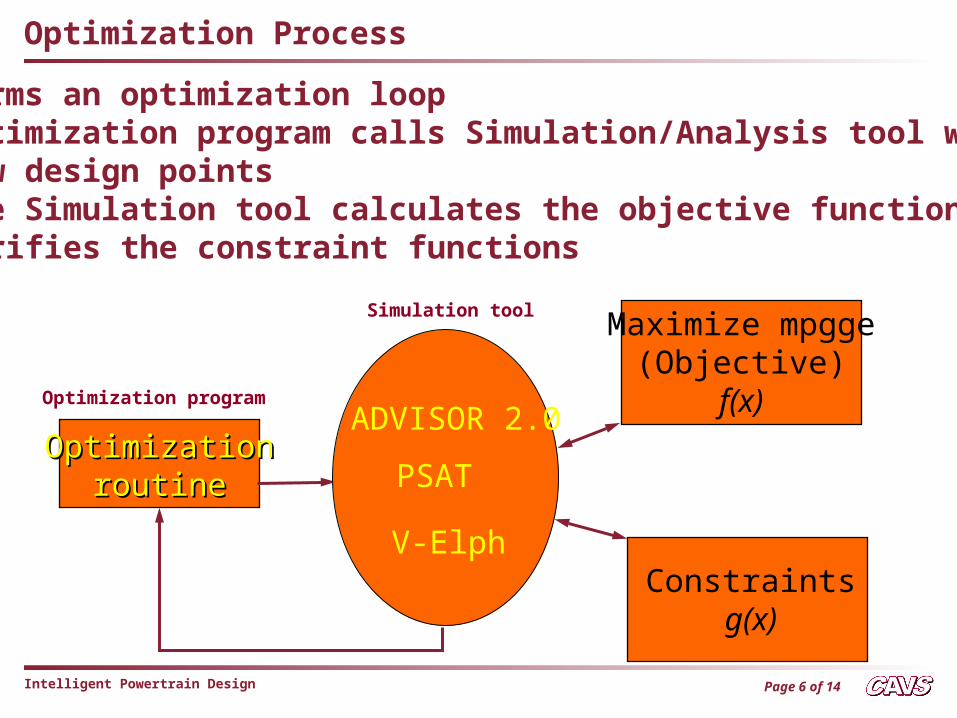
Optimization Process
OptimizationOptimizationroutineroutine
Maximize mpgge(Objective)
f(x)
Constraintsg(x)
• Forms an optimization loop • Optimization program calls Simulation/Analysis tool with new design points• The Simulation tool calculates the objective function and verifies the constraint functions
ADVISOR 2.0
PSAT
V-Elph
Optimization program
Simulation tool
Page 7 of 14Intelligent Powertrain Design
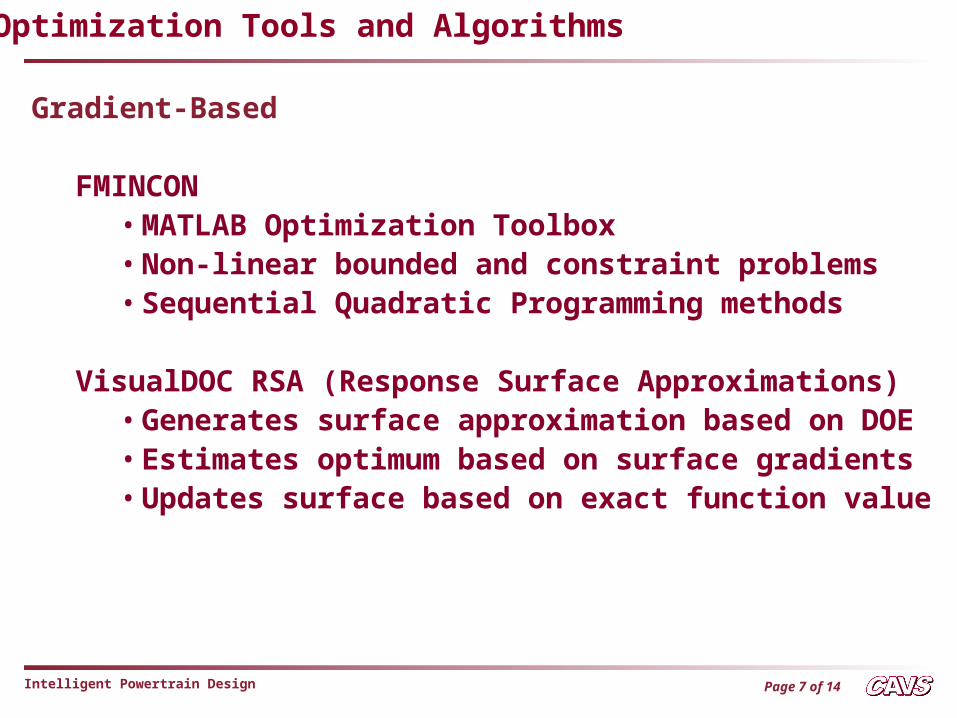
Gradient-Based
FMINCON• MATLAB Optimization Toolbox • Non-linear bounded and constraint problems• Sequential Quadratic Programming methods
VisualDOC RSA (Response Surface Approximations)• Generates surface approximation based on DOE• Estimates optimum based on surface gradients• Updates surface based on exact function value
Optimization Tools and Algorithms
Page 8 of 14Intelligent Powertrain Design
VisualDOC DGO (Direct Gradient Optimization)Applies Sequential Quadratic Programming methods to function values to determine gradients and search direction
iSIGHT• Offers a wide variety of algorithms and solution methods to choose from. Two key features of this tool are 1) its flexibility in defining linkages between multiple programs, and 2) the ability to combine multiple solution methods in series or parallel to solve a specific problem.
• Provides response surface visualization tools that allow the user to explore the impacts of design parameters manually based on design-of-experiments based approximation.
Tools and Algorithms contd…
Page 9 of 14Intelligent Powertrain Design
DIRECT algorithm
DIRECT : DIvided RECTangles
• a global optimization algorithm
• a modification of the standard Lipschitzian approach that eliminates the need to specify the Lipschitz constant
•Lipschitz constant is a weighing parameter, which decides the emphasis on the global and the local search
•eliminates the use of Lipschitz constant by searching all possible values for the Lipchitz constant thus putting a balanced emphasis on both the global and local search.
Page 10 of 14Intelligent Powertrain Design
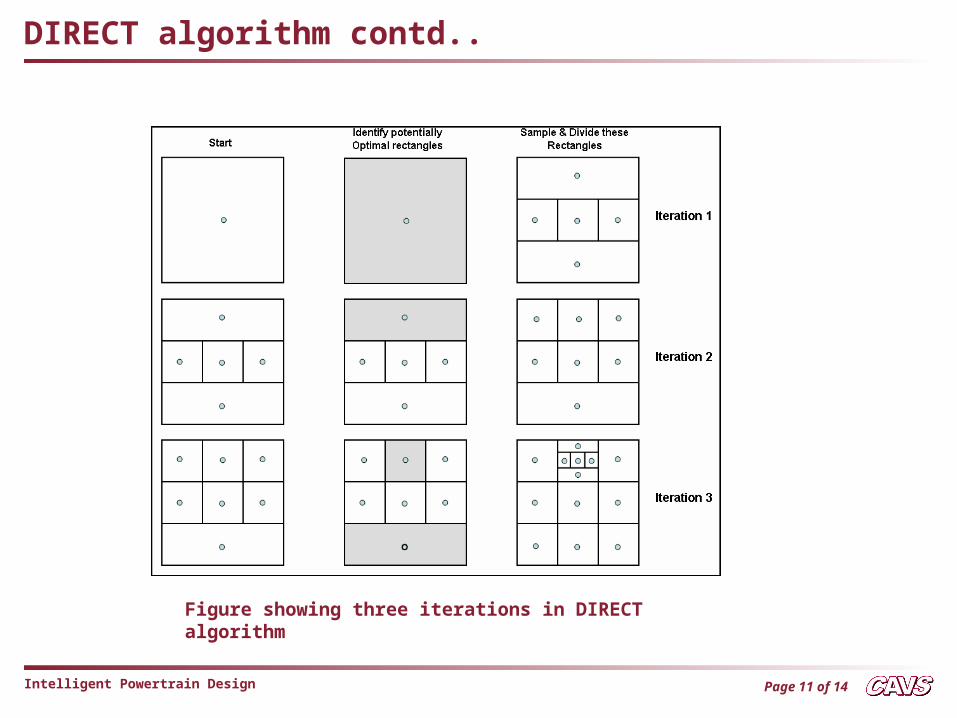
•The algorithm begins by scaling the design box to a n-dimensional unit hypercube. DIRECT initiates its searchby evaluating the objective function at the center point ofthe hypercube
• DIRECT then divides the potentially optimalhyperrectangles by sampling the longest coordinatedirections of the hyperrectangle and trisecting based onthe directions with the smallest function value until the global minimum is found
• Sampling of the maximum length directions preventsboxes from becoming overly skewed and trisecting in thedirection of the best function value allows the biggestrectangles contain the best function value. This strategyincreases the attractiveness of searching near points withgood function values
DIRECT algorithm contd..
Page 11 of 14Intelligent Powertrain Design
DIRECT algorithm contd..
Figure showing three iterations in DIRECT algorithm
Page 12 of 14Intelligent Powertrain Design
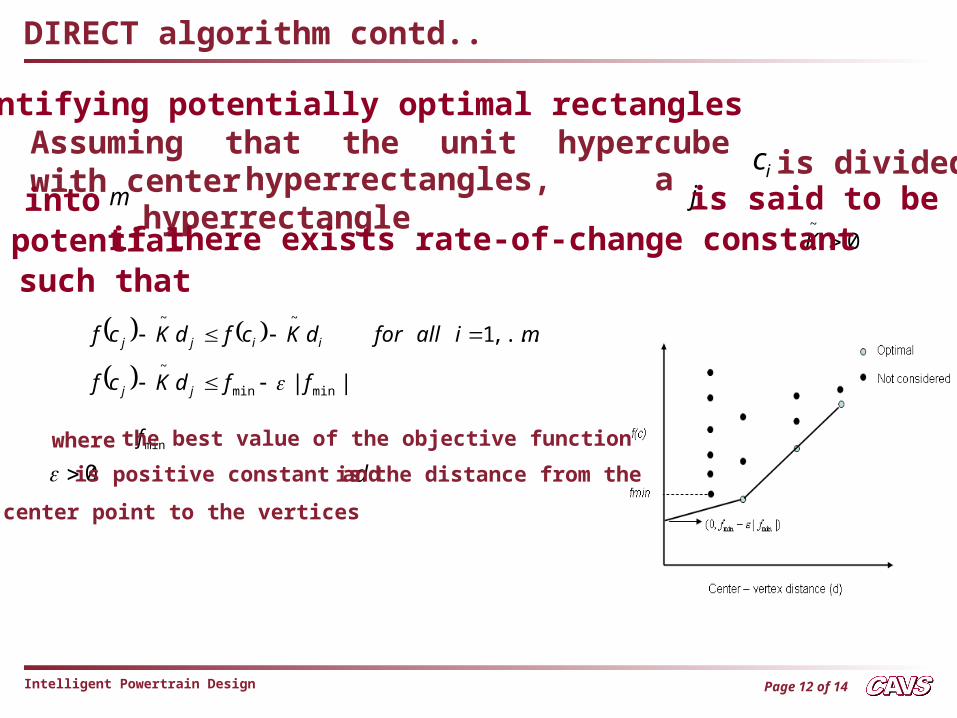
Identifying potentially optimal rectangles
icm j
0~
K
Assuming that the unit hypercube with center is divided hyperrectangles, a hyperrectangle
such that
intopotential
is said to beif there exists rate-of-change constant
||
,...,1
minmin
~
~~
ffdKcf
miallfordKcfdKcf
jj
iijj
minf
0 d
where the best value of the objective function
is positive constant and is the distance from the
center point to the vertices
DIRECT algorithm contd..
Page 13 of 14Intelligent Powertrain Design
•The first equation forces the selection of the rectangles in the lower right convex hull of dots and the second equation insists that the obtained function value exceeds the current best function value by a nontrivial amount.
•This prevents the algorithm from becoming too local, wasting precious function evaluations in search of smaller function improvements. The parameter introduced balances the local and global search.
DIRECT algorithm contd..
Page 14 of 14Intelligent Powertrain Design
1. Normalize the search space to be the unit hypercube. Let c1 be the center point of this hypercube and evaluate f(c1).
2. Identify the set S of potentially optimal rectangles (those rectangles defining the bottom of the convex hull of a scatter plot of rectangle diameter versus f(ci) for all rectangle centers ci)
3. Choose any rectangle r Є S
4. For the rectangle r:
4a. Identify the set I of dimensions with the maximum
side length. Let δ equal one-third of this maximum side length.
DIRECT algorithm contd..
Page 15 of 14Intelligent Powertrain Design
4b. Sample the function at the points c±δei for all i I, where c is ∈the center of the rectangle and ei is the ith unit vector.
4c. Divide the rectangle containing c into thirds along the dimensions in I, starting with the dimension with the lowest value of f(c ± δei) and continuing to the dimension with the highest f(c ± δei).
minx
minf
5. Update S. Set S = S – {r}. If S is not empty, go to Step
3. Otherwise go to Step 6.
6. Iterate. Report the results of this iteration, and then go
to Step 2.
7. Terminate. The optimization is complete. Report the and and stop.
DIRECT algorithm contd..
Page 16 of 14Intelligent Powertrain Design
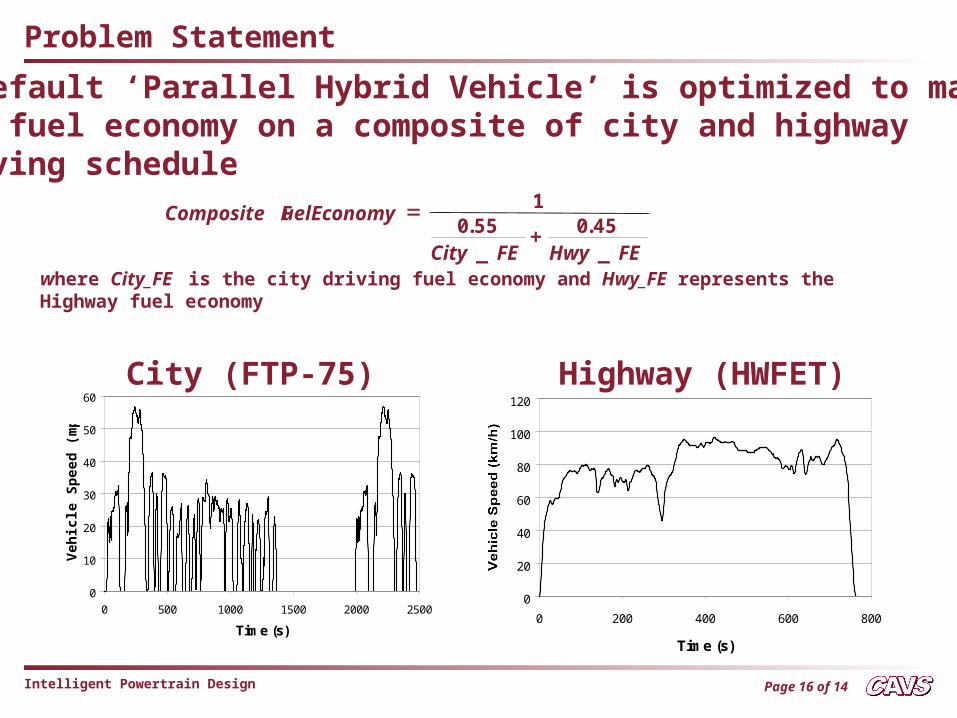
• A default ‘Parallel Hybrid Vehicle’ is optimized to maximize the fuel economy on a composite of city and highway driving schedule
where City_FE is the city driving fuel economy and Hwy_FE represents the Highway fuel economy
FEHwyFECity
uelEconomyComposite F
_45.0
_55.0
1
0
10
20
30
40
50
60
0 500 1000 1500 2000 2500
Time (s)
Veh
icle
Sp
eed
(m
ph
)
0
20
40
60
80
100
120
0 200 400 600 800
Time (s)
City (FTP-75) Highway (HWFET)
Problem Statement
Page 17 of 14Intelligent Powertrain Design
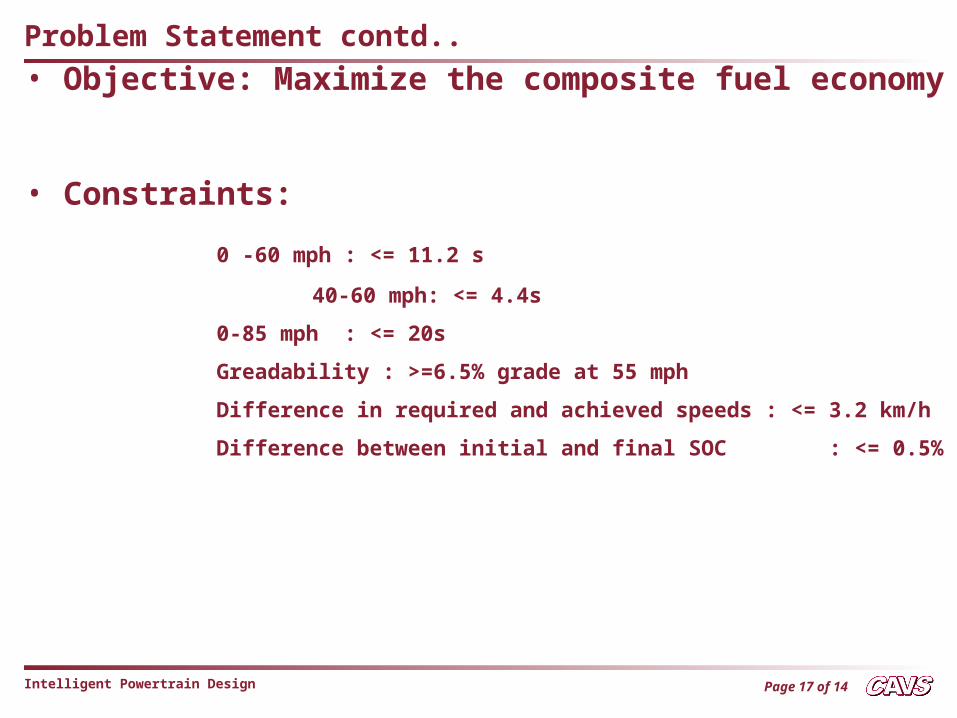
• Objective: Maximize the composite fuel economy
• Constraints:
0 -60 mph : <= 11.2 s
40-60 mph: <= 4.4s
0-85 mph : <= 20s
Greadability : >=6.5% grade at 55 mph
Difference in required and achieved speeds : <= 3.2 km/h
Difference between initial and final SOC : <= 0.5%
Problem Statement contd..
Page 18 of 14Intelligent Powertrain Design
Problem Statement contd..
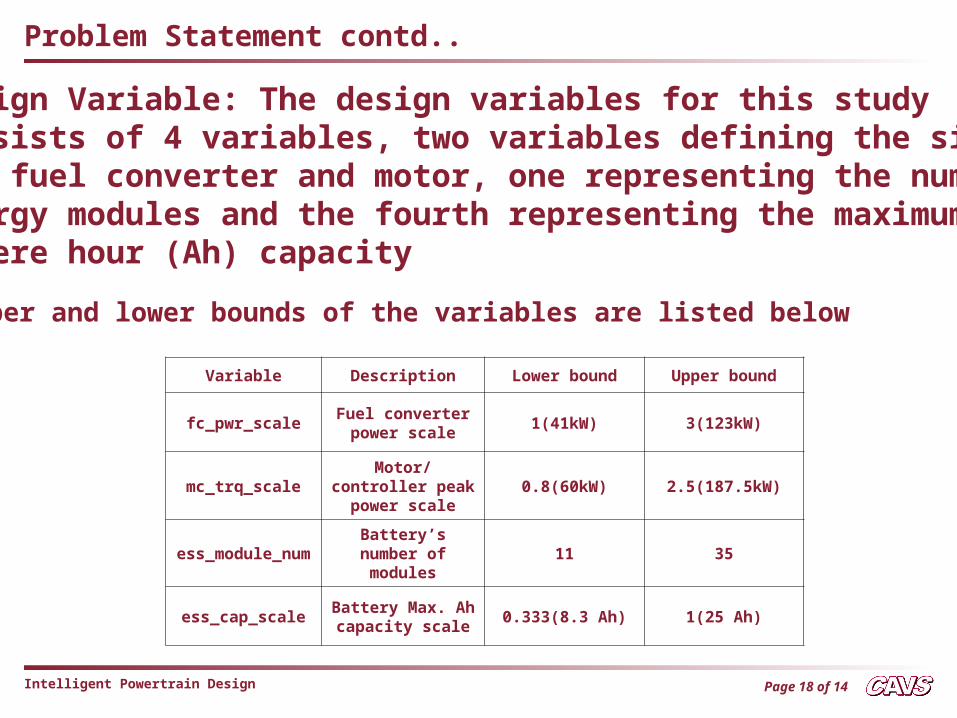
• Design Variable: The design variables for this study consists of 4 variables, two variables defining the size of the fuel converter and motor, one representing the number energy modules and the fourth representing the maximum Ampere hour (Ah) capacity
• Upper and lower bounds of the variables are listed below
Variable Description Lower bound Upper bound
fc_pwr_scaleFuel converter
power scale1(41kW) 3(123kW)
mc_trq_scaleMotor/controller
peak power scale0.8(60kW) 2.5(187.5kW)
ess_module_numBattery’s number
of modules11 35
ess_cap_scaleBattery Max. Ah capacity scale
0.333(8.3 Ah) 1(25 Ah)
Page 19 of 14Intelligent Powertrain Design
Problem Statement contd..
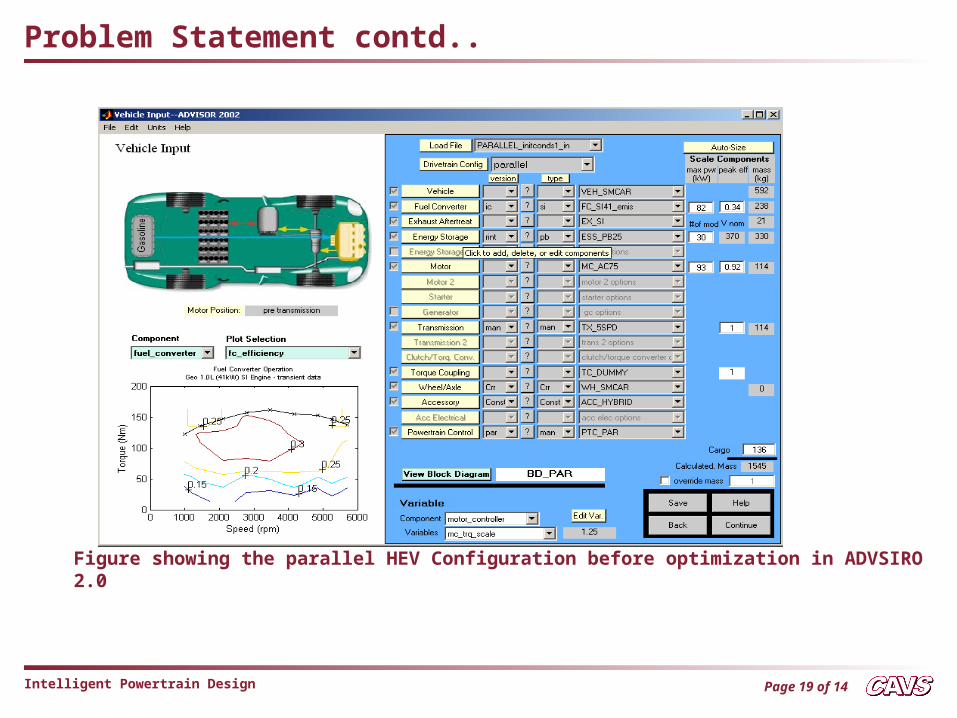
Figure showing the parallel HEV Configuration before optimization in ADVSIRO 2.0
Page 20 of 14Intelligent Powertrain Design
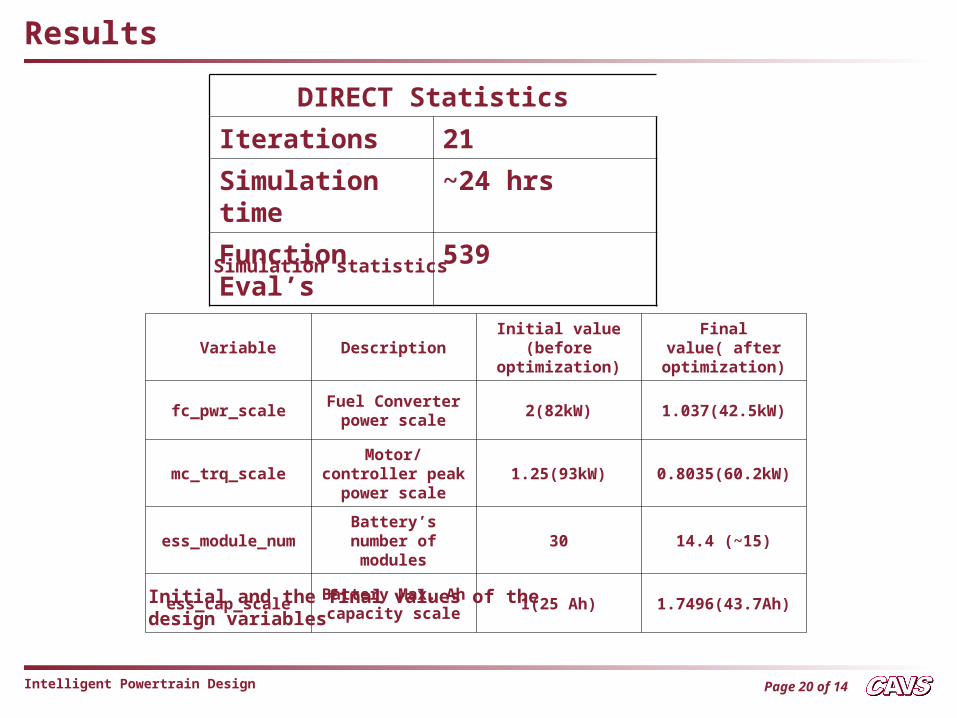
DIRECT Statistics
Iterations 21
Simulation time ~24 hrs
Function Eval’s 539
Variable DescriptionInitial value (before
optimization)Final value( after
optimization)
fc_pwr_scaleFuel Converter
power scale2(82kW) 1.037(42.5kW)
mc_trq_scaleMotor/controller
peak power scale1.25(93kW) 0.8035(60.2kW)
ess_module_numBattery’s number
of modules30 14.4 (~15)
ess_cap_scaleBattery Max. Ah capacity scale
1(25 Ah) 1.7496(43.7Ah)
Results
Initial and the final values of the design variables
Simulation statistics
Page 21 of 14Intelligent Powertrain Design
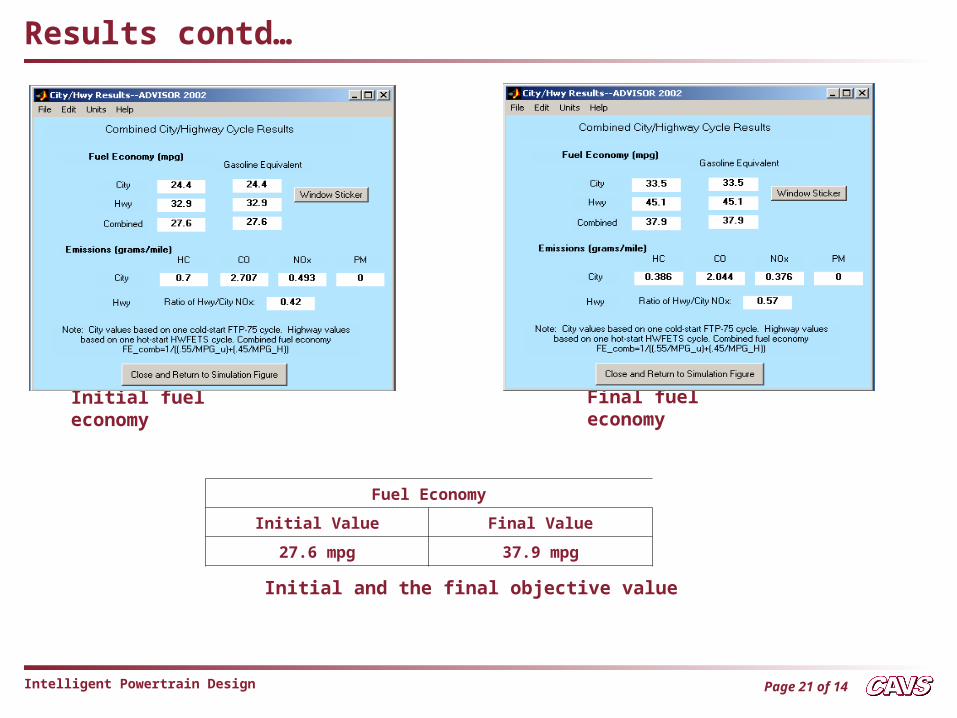
Fuel Economy
Initial Value Final Value
27.6 mpg 37.9 mpg
Results contd…
Initial and the final objective value
Initial fuel economy Final fuel economy
Page 22 of 14Intelligent Powertrain Design
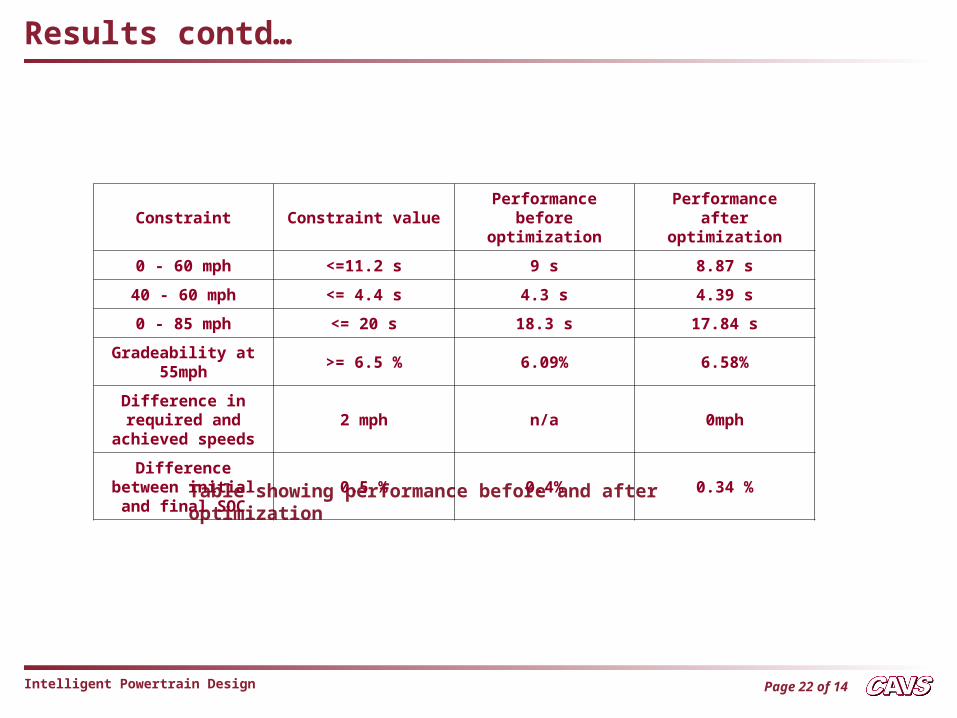
Table showing performance before and after optimization
Constraint Constraint valuePerformance before
optimizationPerformance after
optimization
0 - 60 mph <=11.2 s 9 s 8.87 s
40 - 60 mph <= 4.4 s 4.3 s 4.39 s
0 - 85 mph <= 20 s 18.3 s 17.84 s
Gradeability at 55mph
>= 6.5 % 6.09% 6.58%
Difference in required and
achieved speeds2 mph n/a 0mph
Difference between initial and final SOC
0.5 % 0.4% 0.34 %
Results contd…
Page 23 of 14Intelligent Powertrain Design
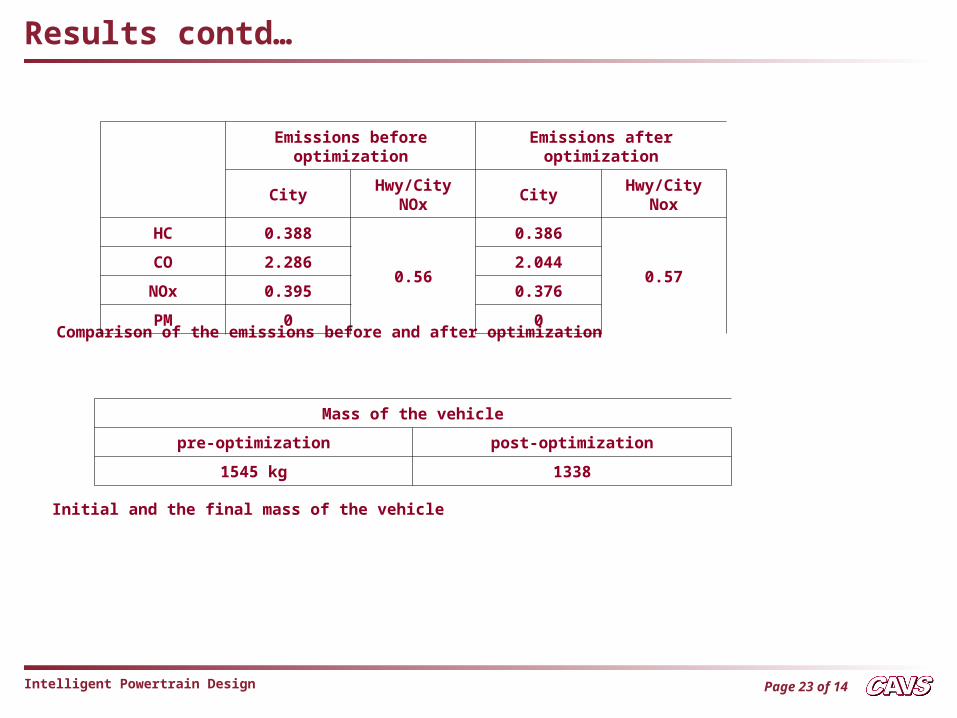
Comparison of the emissions before and after optimization
Mass of the vehicle
pre-optimization post-optimization
1545 kg 1338
Initial and the final mass of the vehicle
Results contd…
Emissions before optimization
Emissions after optimization
City Hwy/City NOx City Hwy/City Nox
HC 0.388
0.56
0.386
0.57CO 2.286 2.044
NOx 0.395 0.376
PM 0 0
Page 24 of 14Intelligent Powertrain Design
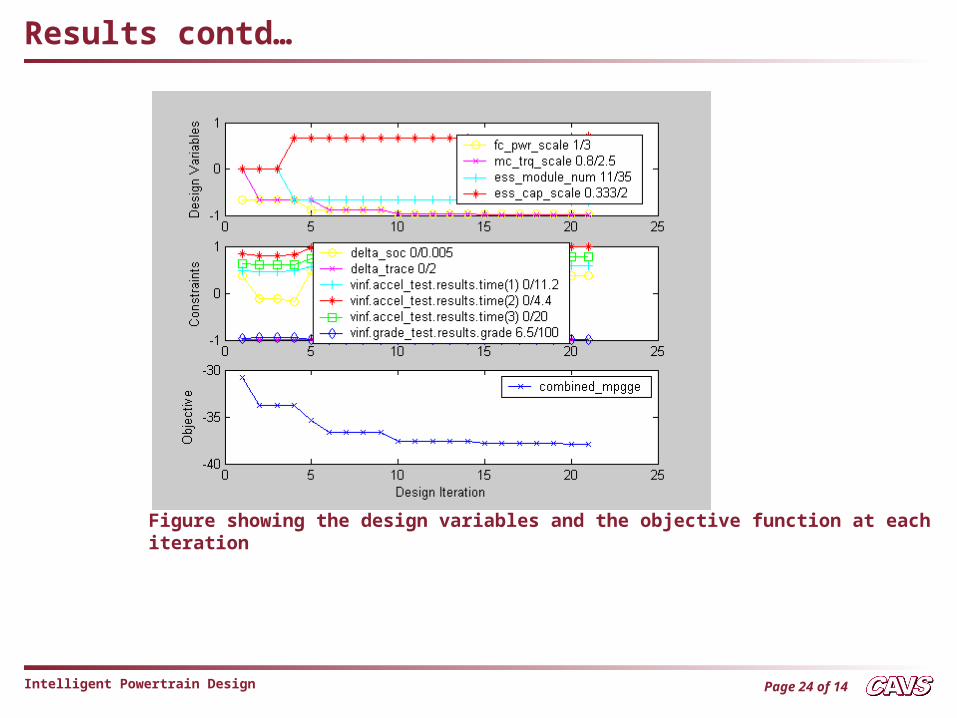
Results contd…
Figure showing the design variables and the objective function at each iteration
Page 25 of 14Intelligent Powertrain Design
References
• Ryan Fellini, Nestor Michelena, Panos Papalambros, and Michael Sasena, “Optimal Design of Automotive
Hybrid Powertrain Systems,” Proceedings of EcoDesign 99 - First Int. Symp. On Environmentally Conscious
Design and Inverse Manufacturing (H. Yoshikawa et al., eds.), Tokyo, Japan, February 1999, pp. 400-405.
• Wipke, K., and Markel, T., ”Optimization Techniques for Hybrid Electric Vehicle Analysis Using ADVISOR,”
Proceedings of ASME, International Mechanical Engineering Congress and Exposition, New York, New York.
(11/11/01-11/16/01)
• M.J.Box, ”A new method of constrained optimization and a comparison with other methods,” Imperial Chemical
Industries Limited, Central Instrument Reseacrh Laboratory, Bozedown House, Whitchurch Hill, Nr. Reading,
Berks 1965.
• D.Jones,” DIRECT Global Optimization Algorithm,” Encyclopedia of Optimization, kluwer Academic Publishers,
2001.
• Report on “Optimal Design of Non-Conventional Vehicles” The University of Michigan, Dept. of Mechanical
Engg., January 19, 2001.
• Haskell R.E., and Jackson C.A., “Tree-Direct: An Efficient Global Optimization Algorithm,” Proc. International
ICSC Symposium on Engineering of Intelligent Systems, University of La Laguna, Tenerife, Spain, February 11-13,
1998.
• Bjorkman, Mattias and Holmstrom, Kenneth, “Global optimization using the DIRECT Algorithm in MATLAB,”
Advanced Modeling and optimization, Vol. 1, No. 2, 1999.
• Jones, D.R., Perttunen, C.D., Stuckman, B.E. ,”Lipschitzian Optimization without Lipschitz Constant,” Journal of
Oprtimization Theory and Applications, Vol. 79, No. 1, October 1993.
• Finkel D.E., and Kelley C.T., “Convergence Analysis of the DIRECT Algorithm,” N. C. State University Center for
Research in Scientific Computation Tech Report number CRSC-TR04-28, July, 2004.