Embed Size (px)
Citation preview

Цифровой позиционер тип 3787на шине FOUNDATIONTM Fieldbus
Инструкцияпо монтажу и эксплуатации
EB 8383-1 RU
Версия микропрограммногообеспечения: R 1.41/K 1.00Издание: март 2001
Рис.1 • тип 3787

2 Содержание
EB 8383-1 RU
Содержание
страница1. Конструкция и принцип действия 81.1 Коммуникации 8
1.2 Опции 9
2. Установка позиционера на клапан 102.1 Прямой монтаж на привод тип 3277 10
2.2 Монтаж согласно DIN IEC 534 14
2.2.1 Последовательность операций при монтаже 14
2.2.2 Предварительная установка рабочего хода 16
2.3 Монтаж на поворотные приводы 18
2.3.1 Монтаж рычага контактного ролика 18
2.3.2 Монтаж промежуточной вставки 18
2.3.3 Установка и закрепление кулачкового диска 20
2.4 Положение безопасности привода 21
3. Подключения 223.1 Пневматические подключения 22
3.1.1 Манометры 22
3.1.2 Питающее давление 22
3.2 Электрические подключения 23
3.2.1 Концевые контакты 24
3.2.2 Принудительный сброс воздуха 24
3.2.3 Осуществление связи 24
4. Эксплуатация позиционера 264.1 Светодиоды 26
4.2 Защита от записи и тумблер имитации 27
4.3 Базовая установка 27
4.3.1 Установка механической нулевой точки 27
4.3.2 Инициализация 28
4.4 Установка индуктивных концевых контактов 29
5. Техническое обслуживание 306. Ремонт Ех-приборов 30

3 Содержание
EB 8383-1 RU
7. Описание параметров 327.1 Общие положения 32
7.2 Описание прибора (DD) 32
7.3 Пояснения к параметрам 32
7.3.1 Обозначение параметров 33
7.4 Блок-схема прибора 33
7.4.1 Приборный блок (Resource Block) 35
7.4.2 Блок обработки (Transducer Block) 41
7.4.3 Функциональные блоки (Functional Blocks) 52
7.4.3.1 Функциональный блок «Аналоговый выход» (Analog Output Function Block) 52
Параметры функционального блока «Аналоговый выход» (Analog OutputFunction Block) 54
7.4.3.2 Функциональный PID-блок (PID-регулятор) 60
7.5 Другие параметры 73
7.5.1 Stale Counter 73
7.5.2 Link Objekte 73
7.5.3 LAS-функциональность 73
8. Сообщения диагностики 748.1 Сообщения в параметре XD_ERROR_EXT (блок обработки – Transducer Block) 74
8.2 Сообщения в параметре XD_ERROR (блок обработки – Transducer Block) 75

4 Замечания по технике безопасности
EB 8383-1 RU
Монтаж и пуск прибора в эксплуатацию могут осуществлятьтолько специалисты, имеющие право на монтаж, запуск иэксплуатацию такого оборудования.Под специалистами настоящей инструкцией подразумеваютсялица, которые на основе своего специального образования, знаний иопыта, а также знаний действующих норм и стандартов,регламентирующих их работу, могут предусмотреть возможныеопасности.
Для работы на взрывоопасных установках с приборами, имеющимивзрывозащищенное исполнение, специалисты должны иметьсоответствующее образование либо свидетельство инеобходимый допуск.
Угрозы безопасности, которые могут быть вызваны врегулирующем клапане свойствами регулируемой среды,управляющим давлением и подвижными частями механизмов,должны быть предусмотрены в необходимых мерах по техникебезопасности.
Если из-за высокого давления питания в приборе могут возникатьи развиваться недопустимо большие величины рабочего хода иусилия перестановки, давление питания должно быть снижено всоответствующих редукционных станциях.
Соответственно должны быть предусмотрены специальнаятранспортировка и хранение таких приборов.

5 Изменения программных версий
EB 8383-1 RU
Изменения микропрограммного обеспечения позиционера относительнопредыдущей версии
Старая версия Новая версия
РегулированиеR 1.41
Коммуникация (связь)К 1.00

6 Технические характеристики
EB 8383-1 RU
ПозиционерХодПрямой монтаж на привод тип 3277Монтаж согласно DIN IEC 5347
Регулируемый7,5…30 мм7,5…120 мм или для поворотных приводов 30…120º
Шинное подключение Интерфейс полевой шины согласно EN 61158-2; питание через шинуPhysical Layer Class: 113 (не Ех-исполнения) и 111 (в Ех-исполнении)Полевой прибор по FM 3610/FISCO
Допустимое напряжение питания 9…32 V DC1) • питание через шинуМаксимальное токопотребление 15 мАДополнительный ток принеисправности
0 мА
Давление питания 1,4…7 бар (20…90 psi); качество воздуха согласно ISO 8573-1:Макс. плотность и размер частиц по классу 2, содержание масла поклассу 3.Точка росы питающего давления должна быть на 10ºC ниженаименьшей ожидаемой окружающей температуры.
Управляющее давление (выход) от 0 бар до максимального давления питанияХарактеристика регулируемая Прямоходный клапан: линейная • равнопроцентная • инверсная
равнопроцентная.SAMSON-заслонка: линейная • равнопроцентная.VETEC-клапан с поворот. затвором: линейная • равнопроцентная.
отклонение характеристики < 1%Мертвая зона (относительнономинального хода/ -угла поворота) Устанавливается от 0,1 до 10,0% • значение холодного старта 0,5%Разрешение (внутренняя погрешностьизмерения)
<0,05%
Время срабатывания При времени хода клапана до 240 с • отдельная установка функцииRampe для сброса и подачи давления
Направление движения Обратимое • возможна установка с помощью программногообеспечения
Расход воздуха Независимый от давления питания <90 ln/часна привод подается при ∆р = 6 бар: 9,3 mn
3/час • при ∆р = 1,4 бар: 3,5 mn3/часПодача
воздуха с привода сбрасывается при ∆р = 6 бар: 15,5 mn3/час • при ∆р = 1,4 бар: 5,8 mn
3/часДопустимая окружающая температура -20…+60ºС1) • расширенный диапазон температур по запросу
температуры ≤ 0,015%/10Kдавления питания нетВлияние
вибраций Отсутствует до частоты 250 Гц и ускорения 4gЗащита от взрыва Eex ia IIC T6 по заявке1)
Класс защиты IP 54 • IP 65 в виде специального исполненияЭлектромагнитная совместимость Согласно нормам EN 50081 и EN 50082Двоичный вход Внутреннее питание 5 В постоянного тока 1) • Ri ≈ 100k для сигнальной
функции
КоммуникацииПередача данных согласно спецификации FOUNDATIONTM Fieldbus • Communication
Profile Class: 31 PS, 32

7 Исполнения
EB 8383-1 RU
Дополнительное оснащениеИндуктивные концевые датчики два шлицевых инициатора тип SJ 2 SN для подключения ключевых
NAMUR-усилителей по DIN 50 227Принудительный сброс воздуха вход: 6…24 В постоянного тока 1) • Граница пробоя 45 В • Ri ≈ 6k • точка
включения около 3 В • значение Kv = 0,17
МатериалыКорпус Алюминий, литье под давлением, хроматированный и с синтетическим
покрытиемНаружные детали Коррозионно-стойкая сталь WN 1.4571 и WN 1.4301Вес около 1,3 кг
1)Для искрозащищенного исполнения 3787-1… служат данные сертификата образцовых испытаний
Варианты исполнения позиционера
Модель 3787 -
Ех-защита без с защитой (E Ex ia IIC)
концевые контакты безДоп. оснащение: 2 индуктивных
принудит.сброс воздуха без с
Пневматические NPT ¼-18подключения ISO 228/1-G ¼
резьбовое соединение М20х1,5 голубойЭлектр. соединения черный количество: 1 2

8 Конструкция и принцип действия
EB 8383-1 RU
1. Конструкция и принципдействияЦифровой позиционер сравниваетзадающий (входной) параметр,периодически поступающий по шинеFOUNDATIONTM Fieldbus, с величинойхода или угла поворота регулирующегоклапана и для коррекциирассогласования вырабатываетнеобходимое управляющее давление.Позиционер предназначен дляустановки на прямоходные илиповоротные приводы.Позиционер тип 3787 устанавливаетсвязь с полевыми приборами,устройствами накопления-программирования и системамиуправления процессом согласноспецификации FOUNDATIONTM Fieldbus.Интегрированный в позиционерефункциональный PID-бок позволяетосуществлять регулированиенеобходимого параметра процессанепосредственно в полевых условиях.Величина рабочего хода регулирующегоклапана воспринимается бесконтактныминдуктивным путевым датчиком (1) ичерез преобразователь подается намикроконтроллер (2). Микроконтроллерпроизводит сравнение величины хода сзадающим параметром и при наличиирассогласования управляет ключевыми2/2-ходовыми вентилями (3, 4).Ключевые вентили нагнетают (3) илисбрасывают (4) давление спневмопривода, в зависимости отвеличины и знака рассогласования.Светодиоды, расположенные внутриприбора сигнализируют рабочеесостояние позиционера.В стандартном случае позиционеримеет один цифровой вход, на которыйпо шине FOUNDATIONTM Fieldbus можетпередаваться любая информация,касающаяся управления процессами.Микротумблер (6), расположенный навнутренней стороне крышки,предохраняет данные об установленнойконфигурации позиционера отслучайной перезаписи.
1.1 КоммуникацииКомплексное управление позиционеромосуществляется в процессе цифровойпередачи сигналов по спецификацииFOUNDATIONTM Fieldbus, согласнопротоколу E EN 50170/A1. Передачаданных производится синхронно, повитой паре, согласно EN 61158-2, в видемодуляции тока со скоростью 31,25кбит/сек.
Конфигурирование с помощьюпрограммного пакета TROVIS-VIEWКонфигурирование позиционера можнопроводить с помощью программногопакета TROVIS-VIEW фирмы SAMSON.Для этого дополнительный цифровойинтерфейс позиционера соединяетсяспециальным кабелем с серийныминтерфейсом персональногокомпьютера RS-232. После адаптациипозиционера к требованиямрегулируемого процесса контрольпроцесса может осуществляться спомощью программы TROVIS-VIEW вOnline-режиме.
Примечание:работа с пакетом TROVIS-VIEWописана в инструкции ЕВ 8383-2.
NI-FBUSTM-конфигураторУстановка конфигурации позиционераможет также выполняться посредствомNI-FBUSTM-конфигуратора фирмыNational Instruments.При этом для соединения с шинойFOUNDATIONTM Fieldbus потребуетсяустановка специальной интерфейснойплаты в компьютере.С помощью NI-FBUSTM-конфигуратораможно осуществлять проектированиекомплексных сетей на основе шиныFOUNDATIONTM Fieldbus.

9 Конструкция и принцип действия
EB 8383-1 RU
1.2 ОпцииВ качестве дополнения к стандартнойкомплектации прибор можетоснащаться дополнительнымифункциями.
Позиционер с концевыми датчиками:Для сигнализации конечных положенийпозиционер может оборудоватьсяшлицевыми инициаторами,обеспечивающими работу различныхпредохранительных устройств.
Позиционер с принудительнымсбросом воздухаПозиционер управляется сигналом6…24В, вследствие чегосоответствующее давление подается нарегулирующий привод. При отсутствиисигнала по напряжению управляющеедавление отсекается, а с приводадавление сбрасывается так, чторегулирующий клапан переводится вположение безопасности независимо отуправляющего воздействиямикроконтроллера.
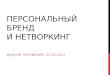
Рис.2 • Блок-схема позиционера
1. Индуктивный путевойдатчик
2. Микроконтроллер3. Ключевой вентиль подачи
давления4. Ключевой вентиль сброса
давления5. Микроконтроллер6. Переключатель защиты от
записи и режима имитации7. Двоичный вход8. Принудительный сброс
давления9. Модуль интерфейса EN
61158-210. Шток привода11. Рычаг12. Зажимная скоба13. Интерфейс
конфигурирования
Двоичныйвход
Принудит.сброс
Питающеедавление
Выходвоздуха

10 Установка позиционера на клапан
EB 8383-1 RU
2. Установка позиционера наклапан
Установка позиционера производитсялибо прямым монтажом на SAMSON-привод тип 3277, либо согласно NAMUR(DIN IEC 534) на клапаны в исполнении слитой рамой, а также на стержневыеклапаны. В соединении с промежуточнойвставкой прибор может использоватьсяв качестве поворотного позиционера,монтируемого на поворотных приводах.Ввиду того, что позиционерпоставляется единым блоком, но бездополнительных принадлежностей,необходимые монтажные детали с ихзаказными номерами надо взять изследующих ниже таблиц.
Внимание:Позиционер не имеет собственнойзаглушки сброса воздуха. Выход наружувоздуха из позиционераосуществляется через каналымонтажных деталей, см. также рис. 3 и5.
2.1 Прямой монтаж на приводтип 3277Если смотреть со стороны подачиуправляющего давления или платыпереключения (для привода 120 см2), тоустановка позиционера должнывыполняться на левой стороне привода.При этом стрелка на черной крышкеприбора (рис. 10) указывает намембранную камеру.
Исключение! Регулирующие клапаны, вкоторых седло перекрываетсяисключительно при втягивании штокапривода. В данном случае монтаждолжен выполняться справа, а стрелканаправлена в противоположную сторонуот мембранной камеры.
1. Привинтить зажимную скобу (1.2) нашток привода таким образом, чтобыкрепежный винт вошел в углублениештока привода.
2. Привинтить необходимый рычагпутевого перемещения D1 или D2 кпередаточному рычагу позиционера.
3. Укрепить промежуточную плату (15) суплотнением на раме привода.
4. Установить позиционер такимобразом, чтобы рычаг D1 или D2скользил по средине штифтазажимной скобы, а затем привинтитьна промежуточной плате (15).
5. Установить крышку (16).
Приводы с эффективной площадьюот 240 до 700 см2
6. Установить боковую платуподключения на соединительномблоке (рис. 3) по направлениюстрелки, изображенной на этом блокетаким образом, чтобы символпривода для конструкции «Штокпривода выдвигается»(соответственно «Шток приводавтягивается») совпадал сконструкцией исполнительногопривода. В противном случаевывинтить оба крепежных винта и,повернув плату подключения на 180º,закрепить ее снова.
7. Установить соединительный блок сего уплотнительными кольцами напозиционер и раму привода изатянуть крепежный винт.Для привода с положениембезопасности «Шток приводавтягивается» смонтироватьпредварительно подготовленнуюпроводку управляющего давления.

11 Установка позиционера на клапан
EB 8383-1 RU
Шток привода выдвигается Шток привода втягивается
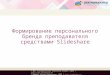
Рис.3 • Монтаж позиционера и подача управляющего давления для приводов тип 3277 (вверху)и тип 3277-5 площадью 120 см2 (внизу)
соединение упр. давлениявнутри
соединение упр. давлениячерез трубкусоединительный блок
вид сбоку:соединительный блокс платой подключения сброс воздуха1.2 Зажимная скоба
D1 РычагD2 Рычаг15 Промежуточная плата16 Крышка
символ «шток приводавыдвигается»
символ «шток приводавтягивается»
маркировка
вход управляющего давления
платапереключения
канал управ-ляющегодавления
маркировка
платапереключения
вход управляющегодавления; принеобходимости слатуннымдросселем
шток привода
выдвигается втягивается

12 Установка позиционера на клапан
EB 8383-1 RU
Привод с эффективной площадью120 см2
В приводе тип 3277-5 площадью 120 см2
управляющее давление подается вмембранную камеру через платупереключения (рис. 3 внизу).
Важно!При номинальном рабочем ходе 7,5 ммво входном шланге управляющегодавления, на раме привода, необходимоустановить латунный дроссель (см.таблицу принадлежностей на стр. 13).При величине рабочего хода 15 мм этаоперация необходима лишь придавлении питания свыше 4 бар.
6. Удалить винт-заглушку наобратной стороне позиционера изаглушить выход управляющегодавления со стороны “Output”(36) пробкой-заглушкой изкомплекта дополнительныхпринадлежностей.
7. Смонтировать позиционер такимобразом, чтобы отверстие впромежуточной плате (15)накрывалось уплотнительнымшлангом в отверстии рамыпривода.
8. Выровнять плату переключенияпо соответствующему символу,для монтажа слева согласномаркировке и привинтить еенакрепко к раме привода.
Примечание.Если на 120см2-приводе дополнительнок позиционеру предполагаетсяустановка магнитного клапана или др.устройства, то запрещается удалятьна обратной стороне винт-заглушкуМ3. В этом случае управляющеедавление должно подаваться наисполнительный привод с выхода“Output” через дополнительнуюсоединительную плату (таблица 2). Вэтом случае черная платапереключения не требуется.
Важно! (для всех приводов)Для «быстрых» клапанов (времясрабатывания <0,6с), принеобходимости улучшенияхарактеристик регулирования,сетку, установленную на выходеуправляющего давления (Output 36),можно заменить навинчивающимсядросселем (из таблицыпринадлежностей).
ВентиляцияЕсли в случае применения привода тип3277 имеется необходимостьвентиляции его пружинной камерывыходным воздухом позиционера, тоэтот воздух может подаваться (вконструкции «шток приводавыдвигается) через соединительнуютрубку (таблица 3) на соединительномблоке. Для этого следует удалитьзаглушку на соединительном блоке.Для тип 3277-5 в исполнении «штокпривода втягивается» пружинная камерапостоянно находится под давлениемвыходящего из позиционера воздуха,который поступает через внутреннийканал.

13 Установка позиционера на клапан
EB 8383-1 RU
Таблица 1
Требующийся рычаг с соответствующей зажимной скобойи промежуточной платой
Размер привода cm2 Зак.Nr. монтажногокомплекта
D1 (33 mm длиной с зажимной скобой высотой 17 mm) 120(G1/4)120(NPT1/4)
1400-67901400-6791
D1 (33 mm длиной с зажимной скобой высотой 17 mm) 240 и 350 1400-6370D2 (44 mm длиной с зажимной скобой высотой 13 mm) 700 1400-6371
Таблица 2 Зак.Nr.
Требующаяся плата переключения для 120cm2-приводаили соединительная плата для установкидополнительного оборудования, например, магнитногоклапана
G 1 /8NPT 1/8
1400-68191400-68201400-6821
G-резьба 1400-6955Требующийся соединительный блок для привода 240, 350и 700 cm2 (включая уплотнения и крепежный винт) NPT-резьба 1400-6956
Таблица 3 Размер приводаcm2 Материал Зак.Nr.
240 сталь 1400-6444240 нерж. 1400-6445350 сталь 1400-6446350 нерж. 1400-6447700 сталь 1400-6448
Необходимая соединительнаятрубка, включая резьбовоесоединение
для привода:«шток привода втягивается»илипри вентиляции верхней мембраннойкамеры 700 нерж. 1400-6449
Комплект манометров для:питающего и управляющего давления
Niro/Ms: 1400-6957 нерж./нерж: 1400-6958Дополнительные
принадлежности Дроссели для управляющего давления (резьбовойдроссель и дроссель из латуни) 1400-6964

14 Установка позиционера на клапан
EB 8383-1 RU
2.2 Монтаж согласно DIN IEC 534Установка по NAMUR осуществляется,как показано на рисунке 4, с помощьюадаптера. При этом рабочий ходклапана передается через рычаг (18) ивал (25) на уголок (28) адаптера и далее,на передаточный штифт (27) на рычагепозиционера.Для установки позиционера потребуютсямонтажные детали, указанные в таблице4 и рычаг, соответствующий величинерабочего хода клапана.Монтаж позиционера на корпусеадаптера должен осуществляться такимобразом, чтобы стрелка на чернойкрышке корпуса показывала вниз отмембранного привода к клапану.
Исключение. Регулирующие клапаны, укоторых седло закрываетсяисключительно лишь при втягиванииштока привода. В данном случаестрелка должна указывать в сторонумембранного привода.Если установка корпуса адаптера междуприводом и клапаном не представляетсявозможной (например, приводы отдругих производителей), то стрелка накрышке корпуса должна указывать внаправлении клапана!
2.2.1 Последовательностьопераций при монтажеНайдите необходимые монтажныедетали в таблице 4.
Важно!Перед установкой монтажных деталейследует подать на привод такоеуправляющее давление, чтобы онустановился в положение,соответствующее 50% рабочего хода.Только в этом случае возможна точнаяустановка рычага (18) и уголка (28).
Регулирующий клапан в исполнениина литой раме
1. Привинтить с помощьюшестигранных винтов плату (20) намуфту, соединяющую штоки приводаи конуса клапана. Для приводов 2100и 2800см2 дополнительноиспользуется уголок (32).
2. Удалить резиновые пробки в корпусеадаптера и укрепить его винтами наребре NAMUR.
Регулирующий клапан в стержневомисполнении
1. Привинтить плату (20) на поводкештока конуса.
2. Завинтить штифтовые винты (29) вкорпус адаптера.
3. Приложить корпус с крепежнойплатой (30) слева или справа кстержню клапана и привинтить егогайками (31). При этом выровнять повысоте таким образом, чтобымонтируемый впоследствии рычаг(18) располагался горизонтально.
4. Завинтить и законтрить штифт (19) всреднем из последовательностиотверстий платы (20) так, чтобы онстоял приблизительно надмаркировкой правильного положениярычага (от 1 до 2) согласно таблице 5для соответствующего положениярабочего хода.Для промежуточных положенийследует выполнять интерполяцию.Предварительно сдвинуть скобу (21)так, чтобы она обжимала штифт.
5. Измерить расстояние от срединывала (25) до средины штифта (19).Позднее величину этого расстоянияпотребуется ввести приконфигурировании позиционера.

15 Установка позиционера на клапан
EB 8383-1 RU
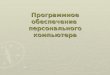
Рис.4 • Монтаж согласно DIN IEC 534 (NAMUR)
расположениедеталей примонтаже
установкана ребре NAMUR
установка на стержне18. Рычаг N1, N219. Штифт20. Плата21. Скоба22. Зажимная плата23. Винт24. Указатель25. Вал26. Рычаг позиционера27а Передаточный винт27b Гайка28. Уголок29. Штифтовые винты30. Плата31. Гайки32. Монтажный уголок

16 Установка позиционера на клапан
EB 8383-1 RU
2.2.2 Предварительнаяустановка рабочего хода
1. Установить вал (25) в корпусадаптера таким образом, чтобычерный указатель (24) совпадал слитой маркировкой на корпусеадаптера.
2. В этом положении зафиксироватьзажимную плату (22) с помощьювинта (23).
3. Завинтить передаточный штифт(27) на рычаге позиционера (26)со стороны запрессованных гаек изаконтрить его с обратнойстороны гайкой. При этом следуетсоблюдать монтажное положениеА или В согласно таблице 5 и всоответствии с рисунком 4.
4. Установить так позиционер накорпусе адаптера, чтобыпередаточный штифт (27)оказался внутри уголка (28).Для этого с передней сторонывставьте отвертку или торцевойключ 2,5мм в отверстие, видимоепод длинным углублением вкрышке и установите рычагпозиционера в необходимоеположение.
5. Привинтить позиционер к корпусуадаптера
6. Сбросить давление с привода.

17 Установка позиционера на клапан
EB 8383-1 RU
Таблица 4Монтаж согласно DIN IEC 534 Клапан ход в
mm с рычагом Зак.-Nr.
7,5 bis 60 N1 (125mm) 1400-6787Клапан на литой раме 30 bis 120 N2 (212mm) 1400-678920 … 25 N1 1400-643620 … 25 N2 1400-643725 … 30 N1 1400-643825 … 30 N2 1400-643930 … 35 N1 1400-6440
NAMUR-комплект для монтажа
Детали см. на рис.4Стержневойклапанс диаметромстержня mm
30 … 35 N2 1400-6441монтажный блок манометра G1/4: 1400-7106 NPT1/4: 1400-7107
комплект манометров нерж/лат.: 1400-6957 нерж./нерж.: 1400-6958Дополнительныепринадлежности
дроссели управляющего давления (резьбовой и дроссель из латуни) 1400-6964
Таблица 5 Монтаж согласно DIN IEC 534
Ход mm *) 7,5 15 15 30 30 60 30 60 60 120Штифт по маркировке *) 1 1 2 1 2 1 2 1 2Расстояние штифт/точка вращениярычага 42 42 84 42 84 84 168 84 168
С рычагом N1 (125 mm длины) N2 (212mm длины)Передаточный штифт (27) напозиции A A В A В
*) для величин рабочего хода, отличающихся от приведенных, (промежуточные значения) следует провестисоответствующую интерполяцию
Таблица 6 Поворотные приводы
SAMSON-привод тип 3278 Привод согласно VDI/VDE 3845Площадь привода 160 cm2 320cm2
Зак.-Nr. Зак.Nr.Монтажные детали, нобез кулачкового диска 1400-7103 1400-7104 1400-7105
Дополнительные принадлежности Зак.-Nr.
Обратный усилитель для приводов двойного действия, неимеющих пружин
G-резьба:1079-1118
NPT:1079-1119
Кулачковый диск с принадлежностями, диапазон углаповорота:0 …90° и 0 …120°
1400-6959
Монтажный блок манометра G1/4:1400-7106
NPT ¼:1400-7107
Комплект манометров нерж./лат.:1400-6957
нерж./нерж.:1400-6958

18 Установка позиционера на клапан
EB 8383-1 RU
2.3 Монтаж на поворотныеприводыС помощью приведенных в таблице 6монтажных и дополнительных деталейпозиционер может устанавливатьсясогласно VDI/ VDE 3845 на поворотныеприводы. При этом вращательноедвижение поворотного привода черезкулачковый диск на его валу иконтактный ролик на рычагепозиционера преобразуется впрямолинейное движение, необходимоедля работы индуктивной системыдатчика перемещения.На одном кулачковом диске имеются двашаблона на диапазоны поворота 0 …90°и 0 …120°.
Для приводов двойного действия, неимеющих пружин, потребуется обратныйусилитель на стороне соединениякорпуса позиционера.
При монтаже на поворотный SAMSON-привод тип 3278 его внутреннеепространство и обратная сторонамембраны продуваются выходнымвоздухом позиционера безиспользования отдельнойсоединительной трубки.
Если позиционер устанавливается наприводы (NAMUR) от другихпроизводителей, вентиляция обратнойстороны мембраны можетпроизводиться через соединительнуютрубку и Т-образное соединение междуприводом и штуцером выходящеговоздуха промежуточной вставки.
2.3.1 Монтаж рычага контактногоролика1. Установить рычаг контактного ролика
(35) на передаточном рычаге (37) изакрепить с помощью прилагаемыхвинтов (38) и шайб.
2.3.2 Монтаж промежуточнойвставки
SAMSON-привод тип 3278:
1. Привинтить двумя винтами адаптер(36) на свободном конце валаповоротного привода.
2. Установить промежуточную вставку(34) на корпусе привода и закрепитьее двумя винтами. При этом следуеттак выровнять промежуточнуювставку, чтобы пневматическиесоединения позиционера былиобращены в сторону корпусамембраны.
Приводы согласно VDI/ VDE 3845:1. Установить комплектную
промежуточную вставку (34, 42 и 44)на монтажную консоль сустановочной поверхностью 1 VDI/VDE 3845 и накрепко привинтить ее.
2. Выровнять кулачковый диск (40) ишкалу согласно гл.2.3.3 и привинтитьего.
Для приводов, не имеющих пружин,следует со стороны корпусапозиционера привинтить обратныйусилитель (45).
1. Завинтить в соединительныхотверстиях позиционераприлагаемые гайки с двойнойрезьбой.
2. Закрепить обратный усилитель спомощью просверленных винтов иуплотнения на позиционере, чтобыотверстие вентиляции напромежуточной вставке оказалосьзакрытым.
3. Соединить камеры привода свыходами А1 и А2 в соответствии снаправлением вращения

19 Установка позиционера на клапан
EB 8383-1 RU
Установка на SAMSON-привод тип 3278 Установка по VDI/VDE 3845 (NAMUR)
Рис.5 • Монтаж на поворотные приводы
33 Позиционер34 Промежуточная вставка35 Рычаг с контактным роликом36 Адаптер37 Передаточный рычаг38 Винты39 Шкала40 Кулачковый диск41 Вал привода42 Шайба43 Скоба (повернуто на 90°)44 Муфта45 Обратный усилитель
Монтажс обратнымусилителем

20 Установка позиционера на клапан
EB 8383-1 RU
2.3.3 Установка и закреплениекулачкового дискаВ поворотных приводах возвратныепружины, установленные с обратной отуправляющего давления стороны,определяют положение безопасности инаправление вращения (вправо, влево)регулирующего клапана.В поворотных приводах двойногодействия пружины отсутствуют, анаправление вращения зависит отконструкций применяемого привода иклапана.Выходное положение – это закрытыйклапан!Принцип действия, как должен работатьклапан, - открываться или закрыватьсяпри возрастании управляющего сигнала,- устанавливается через электронныекоммуникации с помощьюсоответствующего программногообеспечения (направление движения:растет/растет или растет/снижается).
1. Установить кулачковый диск сошкалой на адаптер или муфту(34), а крепежный винт слегказавинтить.
Кулачковый диск имеет две траекторииперемещения, начальные точки которыхпомечены маленькими отверстиями.
Важно!В закрытом положении клапананачальная точка (отверстие)траектории должна быть установленатак, чтобы точка вращениякулачкового диска, 0º-положение шкалыи носик стрелки на дискерасполагались на одной прямой линии.Категорически запрещаетсярасполагать начальную точку длязакрытого положения клапана ниже 0º-положения!
На приводы с положениембезопасности «клапан открыт» (ОТКР)перед установкой кулачкового дискаследует подать максимальноеуправляющее давление.К приводам, не имеющим пружин,должно быть подведено питающеедавление.
2. При установке кулачкового дисканеобходимо вставитьдвухстороннюю шкалу так, чтобыее показания совпадали снаправлением вращенияклапана. При таком положениикулачкового диска крепкозавинтите крепежные винты.
Укрепление кулачкового дискаЧтобы дополнительно предохранитькулачковый диск от проворачиваниянеобходимо предпринять следующее.На кулачковом диске вокруг осирасположено четыре отверстия, одно изкоторых следует выбрать для фиксации.Через выбранное отверстие следуетпросверлить адаптер (36) или муфту(44), чтобы установить там стопорный2мм-штифт.
3. Установить позиционер напромежуточную вставку (34) так,чтобы рычаг контактного ролика(35) своим роликом прилегал ккулачковому диску. Для этого спередней стороны вставьтеотвертку или торцевой ключ2,5мм в отверстие, видимое поддлинным углублением в крышкеи установите рычаг позиционерав требующееся Вам положение.
4. Привинтить накрепко позиционерк промежуточной вставке.

21 Установка позиционера на клапан
EB 8383-1 RU
2.4 Положение безопасностипривода
Важно!Если впоследствии положениебезопасности привода «шток приводапружинами выдвигается» будетизменено на положение «шток приводапружинами втягивается», топотребуется заново уточнитьположение механической нулевой точкии заново инициализироватьпозиционер.
Вид на вал привода со стороны позиционера
Клапан открывается Клапан открываетсяповоротом влево поворотом вправо
Рис.6 • Установка кулачкового диска
контактныйролик
начальная точка
отверстия для фиксации кулачкового диска
после установки крепежныхзащелок их лапки выдавить
наружу!

22 Подключения
EB 8383-1 RU
3.1.2 Питающее давлениеНеобходимое питающее давлениеопределяется номинальным диапазономсигналов и направлением действия(положением безопасности) привода.Номинальный диапазон сигналовнанесен на типовом шильдике ипредставлен в виде диапазона усилияпружин или управляющего давления.
Шток привода выдвигается (FA):необходимое давление питания =конечное значение номинальногодиапазона сигналов + 0,2 бар, но неменее 1,4 бар.
Шток привода втягивается (FE):необходимое давление питания дляплотно закрытого клапана с запасомопределяется исходя из максимальногоуправляющего давления pstmax:
d = диаметр седла (см)∆p = перепад давления на клапане (бар)А = площадь привода (см2)F = конечное значение номинального
диапазона сигналов привода (бар)При отсутствии исходных данныхруководствуемся следующим:необходимое давление питания =конечное значение номинальногодиапазона сигналов + 1 бар.
3. Подключения3.1 ПневматическиеподключенияПневматические подключениявыполняются либо как отверстия срезьбой NPT ¼, либо как отверстия срезьбой G ¼. Могут применятьсяобычные резьбовые штуцерныесоединения для металлических, медныхтрубок или шлангов из синтетическихматериалов.
Важно!Питающее давление должно иметьсухой воздух без примесей масла ипыли. Обязательно следуетсоблюдать предписания потехническому обслуживаниюустановленных на входе редукционныхстанций. Воздушные коммуникацииперед подключением необходимотщательно продувать.
Подключение управляющего давления вслучае прямого монтажа на привод тип3277 жестко задано, при монтажесогласно NAMUR подключениерасполагается в зависимости отположения безопасности «штоквтягивается или выдвигается» нанижней или на верхней стороне привода.Выход воздуха: подключение выходавоздуха позиционера располагается намонтажном дополнительном оснащении.В случае прямого монтажа пробкасброса воздуха находится напластиковой крышке исполнительногопривода, при NAMUR-монтаже накорпусе адаптера, а при установке наповоротном приводе на промежуточнойвставке или обратном усилителе.
3.1.1 МанометрыДля контроля работы позиционерарекомендуется устанавливатьманометры питающего и управляющегодавления. Детали приведены в качестведополнительных принадлежностей втаблицах 3, 4 и 6. Рис.7 • Установка манометра
гайка дроссель с сеткой
Зак.№ 0259-1090 1790-6121

23 Подключения
EB 8383-1 RU
3.2 Электрические подключения
Для электрическогоподключения прибора следуетруководствоватьсядействующимиэлектротехническимипредписаниями и местнымиправилами техникибезопасности.В Германии – это VDE-предписания и правила техникибезопасности объединенияпрофсоюзов.При установке и монтаже вовзрывоопасных зонахдействуют нормы EN 60079-14:1997; VDE 0165 часть 1/8.98.Для подключенияискрозащищенныхэлектрических цепей служатданные сертификатасоответствия или данныесертификата образцовыхиспытаний ЕвропейскогоСообщества.
Замена электрическихподключений может привестик ликвидации Ех-защиты..Покрытые лаком винты накорпусе или внутри него недопускается ослаблять ивывинчивать.
Шинные провода следует подключать квинтовым зажимам, обозначеннымсогласно EN 61158-2. При этомполярность не имеет значения.Экранировку шинных проводов надосоединить с клеммой РЕ.Дополнительную информацию см.FF/проводное соединение иинсталляция AG-140.На двоичном входе можетиспользоваться пассивныйбеспотенциальный контакт. Позиционерчерез шинный протокол передаетинформацию о своем состоянии.Расположение выводов приводится нарисунке 8 и на крышке, внутрипозиционера.

24 Подключения
EB 8383-1 RU
Рис.8 • Электрические подключения (изображение подключений согласно DIN 45140)
Кабельшины
Развязывающий усилительсогласно EN 50 227
от 6 до 24 V DC
Концевые контакты Двоичный Принудит.вход сброс воздуха
Емкостноезаземлениеэкрана

25 Подключения
EB 8383-1 RU
Указания по выбору кабеля иэлектрических проводов:Для прокладки большого количестваискрозащищенных электрических цепейв многожильном кабеле следуетсоблюдать раздел 12 предписаний EN60079-14; VDE 0165/8.98.В особенности необходимо соблюдатьминимальную толщину изоляцииотдельного провода, составляющую неменее 0,2 мм. Под изоляциейподразумеваются широко применяемыеизолирующие материалы, такие, как,например, полиэтилен.Диаметр отдельного проводникатонкожильного провода долженсоставлять не менее 0,1 мм.Окончания проводников следуетпредохранять от обламывания,например, с помощью концевых гильзна каждой жиле кабеля.При подключении более двухотдельных кабелей можносмонтировать дополнительноевинтовое кабельное крепление.Неиспользуемые кабельные жилыдолжны изолироваться с помощьюглухих гильз-заглушек.
Дополнительные принадлежности:Кабельное винтовое соединение М20х1,5синтетический материалчерный Зак.№. 1400-6785голубой Зак.№. 1400-6786
3.2.1 Концевые контактыДля использования концевых контактовнеобходимо в выходной электрическойцепи устанавливать развязывающиеусилители. Они обеспечивают рабочуюбезопасность позиционера,поддерживая предельные параметрыуправляющей электрической цеписогласно NAMUR.При проведении работ навзрывоопасном оборудовании следуетсоблюдать действующие предписания.
3.2.2 Принудительный сбросвоздухаПри наличии опции принудительногосброса воздуха на соответствующиеклеммы 81 и 82 должно бытьподключено постоянное напряжение впределах от 6 до 24 вольт.
Внимание!Если указанное напряжение неподключено или по какой-либо причинепропало, позиционер не сбрасывает спривода воздух и не реагирует науправляющий сигнал.
3.2.3 Осуществление связиУстановление связи между регулятором,программатором, системойавтоматического управления,персональным компьютером, рабочейстанцией с одной стороны и с другойстороны отдельным или несколькимипозиционерами осуществляетсясогласно EN 61158-2.Для того, чтобы применять позиционерыв Ех-зонах, следует применять Ех-разделители.В одном сегменте может обслуживатьсяработа максимум 32 регулирующихклапанов.Количество подключаемыхпозиционеров уменьшается прииспользовании их в Ех-условиях.

26 Подключения
EB 8383-1 RU
Рис.9 • Подключение согласно спецификации FOUNDATIONTM Fieldbus
системауправления
блокпитания
терминирование
терминирование
9.1 Подключение позиционеров тип 3787
9.2 Подключение позиционеров тип 3787 в Ех-зоне
блокпитания
Ех-барьер полевой шины
безопасная зона
Ех-зона
системауправления
терминирование

27 Эксплуатация позиционера
EB 8383-1 RU
4. Эксплуатация позиционера
Предупреждение!Перед вводом в эксплуатациюследует перевестирегулирующий клапан в егоконечное положение череззакрытое заслонкой отверстие(ручное управление) на крышке(рис. 10). При этом следуетпроверить безупречностьфункционирования рычажноймеханики.Превышение максимальногоугла поворота вследствиеошибочного выбора или расчетарычажной механики можетпривести к поломкепозиционера.
4.1 СветодиодыДля наблюдения за функционированиемпозиционера при его вводе вэксплуатацию, последующей его работеи возможных неисправностях навнутренней стороне крышкирасположены два светодиода.В качестве общего пояснения характерафункционирования используетсяследующая цветовая сигнализация:красный цвет:
пуск прибора или неисправность,режим регулирования невозможен
зеленый цвет:неисправность отсутствует, режимрегулирования или положениебезопасности
красный и зеленый цвет:установлена неисправность,возможен режим регулирования.
Детально показания светодиодов см. внижеследующей таблице.
Значение Светодиод
Пуск прибора: красный начинает гореть постоянноНеисправности отсутствуют: зеленый постоянноПрибор на шине, выполняется холодный старт,требуется инициализация зеленый мерцает медленноВыполняется инициализация или коррекция нулевойточки зеленый мерцает быстроПрибор инициализирован, нет действующегопараметра
зеленый мерцает 3 раза быстро +длинная пауза
Прибор инициализирован, действующий параметр,режим регулирования зеленый начинает гореть постоянноНеисправность в режиме регулирования: красный с зеленымОшибка нулевой точки красный и зеленый мерцают
медленноНеисправность в цепи регулирования красный и зеленый мерцают быстроНеисправности, ведущие к срыву первичнойинициализации(прибор не входит в штатный режим)
красный постоянно
Ошибка нулевой точки красный мерцает медленноНеисправность пневматики/механики красный начинает гореть постоянноНеисправность в цепи регулирования красный мерцает быстроНеисправности, ведущие к выходу из режимарегулированияПрибор обнаружил внутреннюю неисправность красный мерцает быстро 3 раза +
длинная пауза

28 Эксплуатация позиционера
EB 8383-1 RU
4.2 Защита от записи и тумблеримитацииНа внутренней стороне крышкирасполагается микротумблер дляактивирования защиты от записи (Writeprotection) и тумблер имитации(Simulation enable).В положении ON (ВКЛ) тумблера защитыот записи (тумблер 2) параметры,заданные в позиционере, защищены отслучайной перезаписи и не могут бытьизменены. Если имеется необходимостьизменить по линии связи параметрыпозиционера, указанный тумблерследует установить в положение OFF(ВЫКЛ).Тумблер имитации (тумблер 1) даетразрешение на свободный вводсимуляции параметра положения длявнутреннего модуля “Analog Output”(аналоговый выход) через параметр“Simulate”.
4.3 Базовая установкаВсе переменные параметрысбрасываются к значениям холодногостарта. Инициализации относительномаксимального диапазона позволяетосуществлять универсальный ввод вэксплуатацию.Позиционер в процессе инициализациисамостоятельно определяет нулевуюточку и максимальный диапазон междумеханическими конечнымиположениями. Установки, выполняемыес отклонениями от указанных,необходимо осуществлять черезкоммуникационные инструменты.
4.3.1 Установка механическойнулевой точки
Важно!Коррекцию нулевой точки следуетпроводить при закрытом клапане(в 3-ходовых клапанах при выведенномштоке привода).
Рис.10 • Позиционер, внутренний вид
стрелка-указательположения указатель ручное серийный тумблерпри монтаже управление интерфейс Simulation
рычаг управляющие регулировочные светодиоды кнопка инициализациинулевой флажки винты GW тумблер или коррекцииточки защиты от записи нулевой точки

29 Эксплуатация позиционера
EB 8383-1 RU
На крышке прибора один раз сильнонажать до упора рычаг нулевой точкив направлении стрелки, после чегожелтый указатель установится набелой линии.
Для тех регулирующих клапанов,которые в своем выходном состояниинаходятся в открытом положении,например, для привода с положениембезопасности «шток втягивается»следует предварительно подать напозиционер питающее давление. Когда вэтом случае активируется ручноедублирование, установитсяуправляющее давление и клапанперейдет в закрытое положение. Теперьможно будет привести в действие рычагнулевой точки.
4.3.2 ИнициализацияПосле подключения питающегодавления и подачи электроэнергии нашинное соединение можно запуститьпроцесс инициализации. При этомпозиционер оптимально подстраиваетсяк характеристикам трения в механизмахи потребностям регулирующего клапанав управляющем давлении.
Предупреждение!Инициализация протекаетнесколько минут. При этомрегулирующий клапанстремительно перемещаетсяотносительно своеготекущего положения. По этойпричине категорическизапрещается производитьинициализацию в ходетекущего производственногопроцесса.Допускается запускинициализации при закрытыхотсечных вентилях или вдемонтированном виде наиспытательном стенде.
Прямая инициализация напозиционереИнициализация на позиционеревозможна только, как ее первичный этап.(Успешная инициализация можетпроисходить через коммуникации).
Начать процесс инициализации, длязапуска которого следует нажатьподходящим инструментом кнопку накрышке позиционера, обозначеннуюкак «Initialisierung/Nullabgleich»(инициализация/коррекция нулевойточки)
Процесс инициализации считаетсяоконченным, когда позиционер займетположение, соответствующеезадающему входному сигналу.
Примечание!Если прибор был один раз успешноинициализирован, то при нажатиикнопки«Initialisierung/Nullabgleich»(инициализация/коррекция нулевойточки) выполняется только коррекциянулевой точки.
Новая инициализация можетвыполняться через подключенныекоммуникации.
Электрическая коррекция нулевойточкиЕсли в процессе эксплуатации клапанапроизойдет смещение механическойнулевой точки, то можно предпринятьэлектрическую коррекцию нулевойточки. Для этого следует использоватькнопку, на внутренней крышке прибораобозначенную как«Initialisierung/Nullabgleich»(инициализация/коррекция нулевойточки), см. рис.10.
Предупреждение!Клапан переводится в конечноеположение.

30 Эксплуатация позиционера
EB 8383-1 RU
На крышке прибора один раз нажатьсильно до упора рычаг нулевой точкив направлении стрелки, после чегожелтый указатель установится набелой линии.
Еще раз нажать кнопку, чтобывыполнить электрическую коррекцию.
Кнопка после второго нажатия будетзаблокирована приблизительно на 1минуту!Электрическая коррекция закончится,когда позиционер займет положениесоответствующее задающему входномусигналу.
4.4 Установка индуктивныхконцевых контактовВ конструкции с индуктивнымиконцевыми контактами на поворотнойоси передаточного рычага позиционерарасполагаются два регулируемыхфлажка, которые приводят в действиесоответствующие шлицевыеинициаторы.Для работы индуктивных концевыхконтактов в выходной электрическойцепи следует использоватьразвязывающие усилители (см. раздел3.2.1).Когда флажок находится в полешлицевого инициатора, тот обладаетвысоким электрическимсопротивлением. Как только флажоквыходит из поля, электрическоесопротивление инициатора падает.В стандартном случае концевыеконтакты устанавливаются так, чтобы вобоих граничных положенияхпозиционера вырабатывалсясоответствующий сигнал. Однако точкисрабатывания можно устанавливать идля сигнализации промежуточныхположений.Требуемая функция коммутации (должноли выходное реле притягиваться илиотпускаться при погружении флажка винициатор) в случае необходимостивыбирается с помощью развязывающегоусилителя.
Установка точки срабатывания:Концевые контакты обозначены внутрикрышки прибора, как GW1 и GW2. Впрорезях под этими обозначениямивидны желтые флажки исоответствующие регулировочные винты(см. рис. 10).Каждое положение срабатывания можетвыдавать сигнализацию при погруженииили при выходе управляющего флажкаиз инициатора.
Перевести клапан в положение,при котором требуется, чтобысрабатывала сигнализация. Затемпосредством вращениярегулировочного винтавыбранного Вами концевогоконтакта GW1 или GW2 такустановить управляющий флажок,чтобы достичь точкисрабатывания, от чего загоритсясветодиод на транзисторном реле.
При этом кромка желтого флажка станетна одну линию с белой прямойгоризонтальной отметкой на крышкекорпуса. Это показывает также, с какойстороны управляющий флажокпогружается в шлицевой инициатор.Для того чтобы обеспечить надежноесрабатывание при любых окружающихусловиях, точка срабатывания должнаустанавливаться, по меньшей мере, за5% хода до механического упора вположениях ОТКР или ЗАКР.

31 Техническое обслуживание
EB 8383-1 RU
5. Техническое обслуживаниеПрибор не нуждается в техническомобслуживании.
Со стороны пневматическогоподключения 9/Supply установленасетчатая вставка с размером ячейки100мкм. При необходимости вставкуможно вывинтить и почистить.
Однако предписания по техническомуобслуживанию редукционных станцийпитающего давления, возможно,установленных перед позиционером,следует обязательно выполнять.
6. Ремонт Ех-приборовЕсли выполнен ремонт позиционера,входящего в состав Ех-оборудования,его пуск в действие возможен толькопосле того как оборудование будетзаново проверено специалистами насоответствие требованиям Ех-защиты, очем должно иметься необходимоесвидетельство или отметка обиспытаниях.
Экспертная проверка оборудованияможет быть исключена, еслипроизводителем оборудование передновым пуском в работу былоподвергнуто поштучным испытаниям иуспешно их прошло, о чем наоборудовании были проставленысоответствующие отметки,удостоверяющие этот факт.

32 Размеры
EB 8383-1 RU
Пневматическое подключениеобратного реле
Рис.11 • Размеры в мм
Пневматические подключенияG ¼ или NPT 1/4
Прямой монтаж
Обратное реле(по выбору)
Монтаж с промежуточнойвставкой для поворот. прив.
Точка вращенияприводного вала
Монтаж DIN IEC 534 с корпусом адаптера

33 Описание параметров
EB 8383-1 RU
7. Описание параметров
7.1 Общие положения
Основные положения этого документа:Спецификация Fieldbus Foudation “Function Block Application Process Part 1…3”Revision 1.4.Спецификация Fieldbus Foudation “Transducer Block Application Process Part 1…2”Revision PS 3.0.
7.2 Описание прибора (DD)Для соединения описываемого здесь прибора в Fieldbus-Host-системы потребуютсядва следующий файла с описанием прибора:Device Description: <0201.ffo, <0201.sym>Capabilities File: <020101.cff>Указанные файлы под производственным номером 1400-7705 можно получить надискете от SAMSON, либо взять из Internet по адресу www.samson.de илиwww.fieldbus.org.
Примечание. Для интеграции в систему DeltaV от Fisher-Rosemount вместо файласовместимости Fieldbus Foudation потребуется файл <Positioner 3787_Rev2.fhx>.Этот файл может быть подготовлен фирмой SAMSON.
7.3 Пояснения к параметрам
Согласно Fieldbus-спецификации версии 1.4 все временные данные в приборномблоке (Resource Block) представлены в размерности 1/32 мс.В поставляемой от Fieldbus Foundation библиотеке Device Description Library,отражающей также основы Device Discription 3787, параметры виртуальноотображаются в размерности мс. Вырабатываемые прибором цифровые значенияследует всегда представлять в размерности 1/32 мс.По той же причине в АО-блоке параметр IO_OPTS “Fault state to value” показываетсякак “Fault state type”.Отдельные параметры могут изменяться только в определенных рабочих режимах(см. «обращение» в описании параметров)Решающим для этого является не текущий режим работы (Actual Mode), а заданныйцелевой режим работы (Target Mode).

34 Описание параметров
EB 8383-1 RU
7.3.1 Обозначение параметров
r =Обращение (операция) чтенияw =Обращение (операция) записиIndex =Относительный индекс параметра в каком-либо блокеO/S =Режим работы «Ждущий режим»MAN =Режим работы «Ручной доступ»AUTO =Режим работы «Автоматический»CAS =Режим работы «Каскадный»RCAS =Режим работы «Внешний каскад»ROUT =Режим работы «Внешний выход»
7.4 Блок-схема прибораВ системе Foundation Fieldbus все функции и параметры какого-либо приборасопоставляются трем различным типам блоков. Каждый тип блока в блочной моделиимеет свое назначение.
Прибор, работающий с Foundation Fieldbus, имеет следующие типы блоков:
Один приборный блок “Resource Block”.Приборный блок отличается свойствами, характерными данному конкретномуприбору.
Один или несколько блоков обработки “Transducer Blocks”.На блок обработки поступают все данные и свойственные прибору параметрыпри связи с устройствами управления процессов (датчиками,исполнительными устройствами).
Один или несколько функциональных блоков “Funktion Blocks”.Функциональные блоки обеспечивают специфические функции регулированияи автоматизации производственных процессов.
Различают многообразные функциональные блоки, например:функциональный аналоговый входной блок (Analog Input Function Block),функциональный аналоговый выходной блок (Analog Output Function Block), PID-регулятор (PID Function Block) и другие входные, выходные или преобразующиеблоки.
Каждый из этих функциональных блоков может применяться для реализацииразнообразных функций управления в пределах всей автоматизированной системы.
В зависимости от расположения и соединения отдельных блоков обеспечиваетсярешение многообразных задач регулирования и управления.

35 Описание параметров
EB 8383-1 RU
Позиционер тип 3787 на шине Foundation Fieldbus содержит следующие блоки:
Один приборный блок “Resource Block”. Один блок обработки для позиционера клапана “Advanced Positioner Valve
Transducer Block”. Два функциональных блока:
- функциональный блок «Аналоговый выход» (Analog Output),- один функциональный PID-блок (PID-регулятор).
Рис.12 • Блок-схема прибора

36 Описание параметров
EB 8383-1 RU
7.4.1 Приборный блок (Resource Block)Приборный блок содержит все данные, которые исчерпывающим образомхарактеризуют этот конкретный прибор. Приборный блок своего рода электронныйшильдик прибора.Например, параметры приборного блока: тип прибора, название прибора,идентификатор изготовителя, серийный номер, а также другие параметры,характеризующие свойства всех других блоков прибора.
Параметры приборного блока (Resource Block)ACK_OPTIONИндекс: 38Обращение: r, wВыбор:
Значение холодногостарта:
Через этот параметр можно выбирать, будет ли тревожнаясигнализация в момент ее возникновения автоматическиподтверждаться (квитироваться, сбрасываться?) в приборе, т.е.без воздействия Fieldbus-Host-системы.Undefined – не выбраноDISC ALM – была изменена защита от записиBLOCK ALM – блочная тревожная сигнализация
Undefined
Примечание: тревожное сигнализация посылается в Fieldbus-Host-систему, однако системой его прием не подтверждается(квитируется)
ALARM_SUMИндекс: 37Обращение: r, wПоказания индикации:
Индикация текущего статуса тревожной сигнализации процессав приборном блоке.
DISC ALM – была изменена защита от записиBLOCK ALM – блочная тревожная сигнализацияПримечание:дополнительно в этой группе параметров можно деактивироватьсигнализацию параметров процессов
ALERT_KEY
Индекс: 4Обращение: r, wЗначения ввода:Значение холодногостарта:
Ввод идентификационного номера отдельного узлаоборудования. Эта информация может использоваться Fieldbus-Host-системой для сортировки тревожных сигналов и событий.
1…255
0Примечание: значение 0 (значение холодного старта) являетсянедопустимым и потому сопровождается записью в приборесообщения об ошибке.
BLOCK_ALARMИндекс: 36Обращение: r, w
Индикация текущего состояния блока с отображениеминформации о возникающих системных, аппаратных ошибках иошибках конфигурации.Примечание:дополнительно в этой группе параметров можно вручнуюподтверждать (квитировать) активную тревожную сигнализациюв блоке.
BLOCK_ERRИндекс: 6Обращение: rПоказания индикации:
Индикация активных (действующих) неисправностей блока.
SIMULATE ACTIVE – имитация возможна, т.к. установленоразрешение “enable”
OUT OF SERVICE – блочный режим O/S (ждущий режим)LOST STATIC DATA – потеря данных в памяти EEPROM

37 Описание параметров
EB 8383-1 RU
CLR_FSTATEИндекс: 30Обращение: r, w
Через этот параметр можно вручную отключать защитныесвойства функционального блока «Аналоговый выход» (AnalogOutput).
CONFIRM_TIMEИндекс: 33Обращение:r, w
Значение холодногостарта:
Задается время подтверждения для протокола событий.Т.е. если в течение этого заданного временного интервалаприбор не получает подтверждения, протокол событийпередается заново.
640000 1/32msCYCLE_TIMEИндекс: 20Обращение: r, wВыбор:
Значение холодногостарта:
Задаваемый со стороны Fieldbus-Host-системы метод обработкиблоков.
SCHEDULEDCOMPLETION OF BLOCK EXECUTION
SCHEDULEDПримечание: выбор метода обработки осуществляетсянепосредственно в Fieldbus-Host-системе.
CYCLE_TYPEИндекс: 19Обращение: rИндикация:
Индикация поддерживаемых прибором методов обработкиблоков
SCHEDULEDCOMPLETION OF BLOCK EXECUTION
DD_RESOURCEИндекс: 9Обращение: r
Указание расположения в приборе источников описанияприбора.Примечание: если в приборе не имеется описания прибора, тона индикаторе появляется сообщение (Null).
DD_REVИндекс: 13Обращение: r
Индикация номера ревизии (версии) описания прибора.
DESCRIPTORИндекс: 46Обращение: r, w
Описание.Текст произвольного содержания для описания приложения;записан в полевом приборе.
DEV_REVИндекс: 12Обращение: r
Индикация номера ревизии (версии) прибора.
DEV_TYPEИндекс: 11Обращение: rИндикация:
Индикация типа прибора в децимальном формате.
1 для тип 3787DEVICE_CERTIFICATIONИндекс: 45Обращение: r
Степень искрозащиты,показывает имеются ли для полевого прибора Ех-допуски.
DEVICE_MESSEGEИндекс: 47Обращение: r, w
Сообщение.Текст произвольного содержания, записанный в приборе.
DEVICE_PRODUCT_NUMИндекс: 48Обращение: r
Производственный номер позиционера.

38 Описание параметров
EB 8383-1 RU
DEVICE_SER_NUMИндекс: 44Обращение: r
Серийный номер прибора.Позволяет в комбинации с данными MANUFAC_ID и DEV_TYPEобеспечить однозначную идентификацию полевого прибора.
FAULT_STATEИндекс: 28Обращение: r
Индикация текущего статуса функции защитного реагированияблока «Аналоговый выход» (Analog Output).
FEATURESИндекс: 17Обращение: r
Индикация дополнительных функций, поддерживаемыхприбором. См. FEATURES_SEL.
FEATURES_SELИндекс: 18Обращение: r, wВыбор:
Выбор функций, поддерживаемых прибором.
REPORTS – Fieldbus-Host-система должна подтвердитьполучение протокола событий.
HARD W LOCK – микротумблер блокирует запись.FAULTSTATE – можно активировать функции защитного
реагирования. (см. SET_FSTATE/ CLR_FSTATE)OUT READBACK – текущее положение клапана будет выдаваться в виде PV (переменой процесса)
функционального блока «аналоговый выход»(иначе, в виде SP).
FREE_TIMEИндекс: 25Обращение:r
Индикация свободного системного времени (в %), котороеимеется в распоряжении других функциональных блоков.Примечание: этот параметр не поддерживается, так какфункциональные блоки прибора тип 3787 имеют фиксированнуюконфигурацию.
FREE_SPACEИндекс: 24Обращение: r, w
Индикация свободной системной памяти (в %), которая имеетсядля обеспечения работы других функциональных блоков.Примечание: этот параметр не поддерживается, так какфункциональные блоки прибора тип 3787 имеют фиксированнуюконфигурацию.
GRANT_DENYИндекс: 14Обращение: r
Разрешение или ограничение прав доступа к полевому приборусо стороны Fieldbus-Host-системы.Примечание: этот параметр в приборе тип 3787 не используется.
HARD_TYPESИндекс: 15Обращение: r, wИндикация:
Индикация типа выходного сигнала для функционального блока«Аналоговый выход» (Analog Output).
SCALAR OUTPUT - скалярный аналоговый выходной параметр.HW_REVISIONИндекс: 43Обращение: r
Состав аппаратного обеспечения электроника/механика.
ITK_VERИндекс: 41
Номер версии интероперационной тестовой системы, на которойпроверялся данный прибор.
LIM_NOTIFYИндекс: 32Обращение: r, wВыбор:Значение холодногостарта:
Через этот параметр задается количество протоколов событий,которое может одновременно оставаться неподтвержденным.
от 0 до 8
8

39 Описание параметров
EB 8383-1 RU
MANUFAC_IDИндекс: 10Обращение: rИндикация:
Индикация идентификационного номера изготовителя.
0 х 00Е099 = SAMSON AG
MAX_NOTIFYИндекс: 31Обращение: rИндикация:
Индикация поддерживаемого прибором количества протоколовсобытий, одновременно существующих неподтвержденными.
8
MEMORY_SIZEИндекс: 22Обращение: r
Индикация объема сконфигурированной памяти в килобайтах.
Примечание: этот параметр не поддерживается, т.к.функциональные блоки прибора тип 3787 имеют фиксированнуюконфигурацию.
MIN_CYCLE_TИндекс: 21Обращение: rИндикация:
Индикация наименьшего времени цикла, которое можетотрабатываться этим прибором (время исполненияфункционального АО-блока 50 мс) (где АО, вероятно, Analog Output)1600 1/32 ms.
MODE_BLKИндекс: 5Обращение: r, w
Индикация:
Индикация текущего режима работы приборного блока(Resource Block); разрешенных режимов (Permitted),поддерживаемых приборным блоком и стандартного (Normal)режима работы.
AUTOO/SПриборный блок поддерживает следующие режимы работы:AUTO – автоматический режим
В этом режиме работы разрешается работафункциональных блоков (функциональные AO- и PID-блок). (АО, вероятно Analog Output).
O/S – Out of Service (ждущий режим)В этом режиме работы действие функциональныхблоков (функциональные AO- и PID-блок) остановлено.Эти блоки переходят в режим O/S.
NV_CICLE_TИндекс: 23Обращение: r
Индикация интервала времени, в течение которого данныеперезаписываются в энергонезависимой (долговременной)памяти.
Примечание: для прибора тип 3787 долговременные данныенакапливаются непосредственно после их передачи.
RESTARTИндекс: 16Обращение: r, wВыбор:
Через этот параметр можно различным образов проводить«сброс» работы прибора.
RUN – стандартное рабочее состояниеRESOURCE – (не поддерживается)DEFAULTS – параметры прибора и подключение
функциональных блоков сбрасываются кзначениям, заданным в спецификации, т.е.установка по умолчанию.
PROCESSOR – горячий старт прибора, повторный стартпроцессора.

40 Описание параметров
EB 8383-1 RU
RS_STATEИндекс: 7Обращение: rИндикация:
Индикация текущего рабочего состояния приборного блока(Resource Block).
ONLINE – нормальное рабочее состояние,блок находится в режиме работы AUTO.
STAND_BY – приборный блок находится в режиме O/S.ONLINE LINKING – сконфигурированные соединения между
функциональными блоками еще неустановлены.
SET_FSTATEИндекс: 29Обращение: r, w
Через этот параметр можно вручную активировать защитноереагирование функционального блока «Аналоговый выход».
SHED_RCASИндекс: 26Обращение: r, w
Задается контрольное время для проверки соединения междуFieldbus-Host-системой и PID-блоком в режиме работы RCAS.По истечении контрольного времени PID-блок изменяет RCAS-режим работы на режим, выбранный в параметре SHED_OPT.
SHED_ROUTИндекс: 27Обращение: r, w
Значение холодногостарта:
Задается контрольное время для проверки соединения междуFieldbus-Host-системой и PID-блоком в режиме работы ROUT.По истечении контрольного времени PID-блок изменяет ROUT-режим работы на режим, выбранный в параметре SHED_OPT.
640000 1/32SW_REVISIONИндекс: 42Обращение: r
Версия микропрограммного обеспечения (Коммуникация/Регулирование).
STRATEGYИндекс: 3Обращение: r, w
Значение холодногостарта:
Параметр для группировки и, благодаря этому, ускореннойобработки блоков. Группировка реализуется посредствомустановки одинаковых численных значений в параметреSTRATEGY для каждого отдельного блока.
0Примечание: эти данные приборным блоком ни проверяются, ниобрабатываются.
ST_REVИндекс: 1Обращение: r
Индикация результатов ревизии состояния статических данных.
Примечание: ревизия производится при каждом изменениикакого-либо статического параметра в блоке.
TAG_DESCИндекс: 2Обращение: r, wЗначение холодногостарта:
Ввод характерного для данного потребителя текста, максимум32 знака, для более точной идентификации и «привязки» блока.
Текст отсутствует.TEST_RWИндекс: 8Обращение: r, w
Примечание:этот параметр требуется только для сертификационныхиспытаний и в стандартном режиме работы значения не имеет.
TEXT_INPUT_1Индекс: 50Обращение: r, w
Текстовое поле для информации произвольного содержания.
TEXT_INPUT_2Индекс: 51Обращение: r, w
Текстовое поле для информации произвольного содержания.

41 Описание параметров
EB 8383-1 RU
TEXT_INPUT_3Индекс: 52Обращение: r, w
Текстовое поле для информации произвольного содержания.
UPDATE_EVTИндекс: 35Обращение: r
Индикация в случае изменения статических данных, включаядату и время.
WRITE_ALMИндекс: 40Обращение: r, w
Индикация статуса для сигнализации защиты от записи.
Примечание: сигнализация будет активирована, если снятазащита от записи.Дополнительно в этой группе параметров можно вручнуюподтверждать (квитировать, сбрасывать?) активнуюсигнализацию защиты от записи.
WRITE_LOCKИндекс: 34Обращение: r, w
Выбор:
Для защиты от записи в аппаратном обеспечении (Hardware):индикация статуса защиты от записи
Для защиты от записи в программном обеспечении (Software):активация/деактивация защиты от записи.
LOCKEDNOT LOCKED
WRITE_PRIИндекс: 39Обращение: r, wУстановка:
Значение холодногостарта:
Установка характеристики сигнализации защиты от записи(параметр WRITE_ALM).
0 сигнализация защиты от записи не используется.1 нет оповещения Fieldbus-Host-системы при срабатывании сигнализации защиты от записи.2 зарезервировано для блочных сигнализаций3…7 сигнализация защиты от записи с указанным приоритетом (3=низкий приоритет, 7=высокий приоритет) выдается для информирования пользователя.8…15 сигнализация защиты от записи с указанным приоритетом (8=низкий приоритет, 15=высокий приоритет) выдается как критическая тревога.
0
WRITE_PROTECT_SWITCHИндекс: 49Обращение: r
Установленное в приборе положение тумблера защиты отзаписи:
0=нет защиты от записи1=установлена защита от записи.

42 Описание параметров
EB 8383-1 RU
7.4.2 Блок обработки (Transducer Block)Блок обработки осуществляет различные преобразования входных и выходныхсигналов от функциональных блоков. Благодаря этому реализуется калибровкаизмеряемых параметров и данных регулирования, линеализация характеристик илирасчет физических величин на основе данных производственного процесса.Параметрами этого блока является информация о типе привода, его соединении,физических единицах, пуске в работу, диагностике, а также специфическиехарактеристики прибора.
Standard Advanced Positioner Valve Transducer Block (блок обработки дляпозиционера клапана) получает управляющий сигнал от включенного перед нимфункционального блока Analog Output Function Block (Аналоговый выход). Этотпараметр используется для позиционирования регулирующего органа в клапане.Блок содержит параметры, обеспечивающие согласование клапана с приводом ипараметры, относящиеся к вводу в эксплуатацию и диагностике регулирующегоклапана.
Параметры Standard Advanced Positioner Valve Transducer Block (блок обработкидля позиционера клапана)Этот блок содержит параметры, характеризующие привод и клапан, на которыхсмонтирован позиционер. Параметры этого блока предназначены для согласованияпозиционера с клапаном, а также для пуска в производственный процесс идиагностики комплектного состава всего регулирующего клапана.
Рис.13 • Блок обработки (Transducer Block)

43 Описание параметров
EB 8383-1 RU
Примечание.Для разновидности инициализации, относящейся к максимальному диапазону(значения холодного старта), пуск в действие может осуществляться посленадлежащего механического монтажа непосредственно через параметрыSELF_CALIB_CMD.Результат инициализации появляется в SELF_CALIB_STATUS. При такойразновидности инициализации согласование остальных параметров этого блока,в общем, не требуется.
ACT_FAIL_ACTIONИндекс: 21Обращение: rИндикация:
Положение безопасности привода при отсутствии питающейэнергии. Определяется автоматически в ходе инициализации.
UNINITIALIZED – не инициализировано, не назначеноSELF-CLOSING – закрывается (в направлении позиции 0%)SELF-OPENING – открывается (в направлении позиции 100%)INDETERMINATE – отсутствует
ACT_MAN_IDИндекс: 22Обращение: r, w
Изготовитель привода.Характеризует изготовителя привода, работающего спозиционером.
ACT_MODEL_NUMИндекс: 23Обращение: r, w
Тип / Исполнение привода, работающего с позиционером.
ACT_SNИндекс: 24Обращение: r, w
Серийный номер привода, работающего с позиционером.
ACT_STROKE_TIME_DECИндекс: 59Обращение: r
Минимальное время срабатывания ЗАКР.Минимальное время срабатывания ЗАКР (в направлениипозиции 0%) – это фактическое время в секундах, котороетребуется системе из позиционера, привода и клапана для того,чтобы совершить номинальный рабочий ход/угол поворота внаправлении закрывания клапана (измеряется в ходеинициализации).
ACT_STROKE_TIME_INCИндекс: 60Обращение: r
Минимальное время срабатывания ОТКР.Минимальное время срабатывания ОТКР (в направлениипозиции 100%) – это фактическое время в секундах, котороетребуется системе из позиционера, привода и клапана для того,чтобы совершить номинальный рабочий ход/угол поворота внаправлении открывания клапана (измеряется в ходеинициализации).
ACTUATOR_TYPEИндекс: 46Обращение: rИндикация:
Разновидность привода, работающего с позиционером.
ELECTRO PNEUMATIC = электропневматический.ACTUATOR_VERSIONИндекс: 48Обращение: r, wВвод:
Значение холодногостарта:
Серия привода; с возвратными пружинами или без них.
SINGLE ACTING – простого действия с возвратными пружинамиDOUBLE ACTING – двойного действия без пружин
SINGLE ACTING

44 Описание параметров
EB 8383-1 RU
ALERT_KEYИндекс: 4Обращение: r, wВвод:Значение холодногостарта:
Ввод идентификационного номера отдельного узлаоборудования. Эта информация может использоваться Fieldbus-Host-системой для сортировки тревожных сигналов и событий.1…255
0Примечание: Значение 0 (значение холодного старта) являетсянедопустимым и потому сопровождается записью в приборесообщения об ошибке.
ATTASHMENTИндекс: 47Обращение: r, wВвод:
Значение холодн. старта:
Указывает вид монтажа позиционера на прямоходный клапан.
INTEGRATED – интегрированный монтаж в соединении сприводом 3277,
NAMUR – по NAMUR; вид монтажа по DIN/IEC 534 (NAMUR)INTEGRATEDПримечание: для поворотных приводов возможен только монтажпо VDI/ VDE 3845 (NAMUR), тогда параметр не имеет влияния.
BINARY_INPUTИндекс: 41Обращение: r, wПоказания:
Состояние двоичного входа.
NOT ACTIVE – не активноACTIVE - активноNOT EVALUATED – на определено
BLOCK_ALARMИндекс: 8Обращение: r, w
Индикация текущего состояния блока с информированием овозникших системных ошибках, ошибках аппаратного ипрограммного обеспечения.
Примечание: дополнительно в этой группе параметров можновручную подтверждать (сбрасывать?) сработавшую блочнуюсигнализацию (об ошибках).
BLOCK_ERRИндекс: 6Обращение: rПоказания:
Индикация возникшей блочной неисправности.OUT OF SERVICE – режим блока O/S (ждущий режим).DEVUCE NEEDS MAINTENANCE NOW – требуется техническое
обслуживание (ошибка в нулевой точке,помехи позиционирования или ошибочнаяинициализация).
LOCAL OVERRIDE – прибор находится в местном обслуживании.INPUT FAILURE – ошибочна информация о позиционировании
(прибор не инициализирован).MEMORY FAILURE – ошибка памяти.LOST STATIC DATE – ошибка контрольной суммы.
CHARACTИндекс: 42Обращение: r, w
Ввод:
Значение холодногостарта:
Выбор характеристики для «привязки» регулирующегопараметра к диапазону рабочего хода или угла поворота.
LINEAR – линейная.EQUAL PERCENTAGE – равнопроцентная.EQUAL PERCENTAGE REVERSE – обратная равнопроцентная.SAMSON BUTTERFLY LINEAR – SAMSON-заслонка, линейная.SAMSON BUTTERFLY EQUAL PERCENTAGE – SAMSON-заслонка, равнопроц.VETEC ROTARY LINEAR – VETEC поворотный конус, линейная.VETEC ROTARY EQUAL PERCENTAGE – VETEC поворот. конус, равнопроц.
LINEAR.

45 Описание параметров
EB 8383-1 RU
COLLECTION_DIRECTORYИндекс: 12Обращение: r
Примечание:этот параметр прибором тип 3787 не поддерживается.
DEADBANDИндекс: 35Обращение: r, wДиапазон:Значение холодногостарта:
Мертвая зона в процентах от номинального хода/ номинальногоугла поворота.
0,1…10%
0,5%
DELAY_TIMEИндекс: 37Обращение: r, w
Диапазон:Значение холодногостарта:
Время задержки.Критерий сброса для текущего контроля регулирующего контура.Когда установленное время задержки DELAY_TIME превышено,а величина рассогласования в течение установленного временивыходит за рамки заданного диапазона TOLERANCE_BAND,вырабатывается сигнализация о неисправности контурарегулирования.В процессе инициализации определяется исходя изминимального времени срабатывания.
1…240 с
10 сDEVIATIONИндекс: 34Обращение: r
Рассогласование позиционера.
FINAL_VALUEИндекс: 13Обращение: r
Этот параметр содержит управляющий сигнал, поступающий отвключенного на входе функционального блока «Аналоговыйвыход» (Analog Output Function Block).
FINAL_VALUE_CUTOFF_HIИндекс: 15Обращение: r, w
Диапазон:Значение холодногостарта:
Конечное положение, если выше …Если заданное значение превышает установленную величину,то клапан переводится в направлении конечного положения, чтосоответствует 100% управляющего сигнала. Это выполняетсяпосредством полного сброса или подачи давления на привод(согласно положению безопасности).
0…125%
99%
Примечание:при вводе значения -2,5% функция отключается(деативируется).Т.к. при этой функции привод полностью нагружается давлениемили давление с него полностью сбрасывается, регулирующийклапан переводится в свое «абсолютное» конечное положение.При этом ограничения, налагаемые функций «Диапазонрабочего хода» (Hubbereich) или «Ограничение рабочего хода»(Hubbegrenzung) здесь не действуют.Если в этой связи могут возникнуть недопустимо большиеусилия перестановки, функцию следует отключить.

46 Описание параметров
EB 8383-1 RU
FINAL_VALUE_CUTOFF_LOИндекс: 16Обращение: r, w
Диапазон:Значение холодногостарта:
Конечное положение, если меньше …Если заданное значение падает ниже установленной величины,то клапан переводится в направлении конечного положения, чтосоответствует 0% управляющего сигнала. Это выполняетсяпосредством полного сброса или подачи давления на привод(согласно положению безопасности).-2,5%…100%
1%Примечание: При вводе значения -2,5% функция отключается.Т.к. при этой функции привод полностью нагружается давлениемили давление с него полностью сбрасывается, регулирующийклапан переводится в свое «абсолютное» конечное положение.При этом ограничения, налагаемые функций «Диапазонрабочего хода» (Hubbereich) или «Ограничение рабочего хода»(Hubbegrenzung) здесь не действуют.Если в этой связи могут возникнуть недопустимо большиеусилия перестановки, функцию следует отключить.
FINAL_VALUE_RANGEИндекс: 14Обращение: r
Этот параметр содержит диапазон регулирования (XD_SCALE),используемый в подключенном на входе функциональном блоке«Аналоговый выход» (Analog Output Function Block).
FINAL_POSITION_VALUEИндекс: 17Обращение: r
Текущее положение клапана в значении FINAL_VALUE_RANGE.
IDENT_BINARY_INPUTИндекс: 44Обращение: r, wВвод:
Значение холодногостарта:
Показывает, задействован ли двоичный вход и если да, то какимобразом.
NOT EVALUATED – не используетсяACTIVELY OPEN – активно открытACTIVELY CLOSED – активно закрыт
NOT EVALUATEDIDENT_FORCED_VENTINGИндекс: 43Обращение: rПоказания:
Показывает, включена ли опция принудительного сбросавоздуха:
NOT IMPLEMENED – опция не задействована, вход не используется.IMPLEMENED – опция задействована, вход используется.
IDENT_LIMIT_SWITCHESИндекс: 45Обращение: r, wВвод:
Значение хол. старта:
Показывает, имеется ли опция индуктивных концевых контактов.Автоматически не опознается.
NOT IMPLEMENED – концевые контакты не установлены.IMPLEMENED – концевые контакты установлены.согласно комплектации аппаратного обеспечения.
INIT_METHODИндекс: 54Обращение: r
Ввод:
Значение хол. старта:
Разновидность инициализации. Инициализации относительнономинального- или максимального диапазона. Приинициализации в номинальном диапазоне учитывается диапазонрегулирования в пределах номинального рабочего хода/углаповорота (например, проходной клапан с механическим упоромс одной стороны).При инициализации в максимальном диапазоне используетсямаксимально возможный диапазон перестановки (например, 3-ходовой клапан с механическими упорами по обе стороны)MAXIMUM RANGE – инициализации по максимальному диапазону.NOMINAL RANGE – инициализация по номинальному диапазону.MAXIMUM RANGE

47 Описание параметров
EB 8383-1 RU
MAX_HUBИндекс: 58Обращение: r
Максимально возможный ход/ угол поворота.В ходе инициализации рассчитывается максимальный ход/уголповорота в процентах от заданного номинального хода/номинального угла.
MODE_BLKИндекс: 5Обращение: r, w
Выбор:
Показания/выбор текущего режима работы приборного блока(Resource Block), разрешенного режима (Permitted), которыйподдерживается блоком обработки Transducer Block истандартный режим работы (Normal).AUTOO/SБлок обработки поддерживает следующие режимы работы:AUTO – автоматический (автоматический режим)
В этом режиме из управляющего сигнала, получаемого от АО блока(вероятно, Analog Output), рассчитывается положениепозиционирования, в которое устанавливается регулирующий орган(клапан).
O/S – Out of Service (ждущий режим)В этом режиме управляющий сигнал, поступающий от АО блока, неиспользуется, а регулирующий орган (клапан) переходит вмеханическое положение безопасности, задаваемое параметромACT_FAIL_ACTION. В любом случае активация принудительного сбросавоздуха приводит к переходу в режим O/S.
LO – Local Override (локальная перезагрузка, наложение данных)При активировании функций, например таких, как инициализация иликоррекция нулевой точки, а также при местном обслуживании прибора(пакет TROVIS-VIEW) прибор переходит в режим LO. При выходе изэтого режима устанавливается заданный режим.
MOUNTING_POSITIONИндекс: 49Обращение: r, w
Ввод:
Значение холодногостарта:
Положение при монтаже. Расположение позиционераотносительно привода (для случая прямоходного привода).(Стандартное расположение:интегрированный монтаж – стрелка в сторону к приводу;монтаж по NAMUR – стрелка в сторону от привода).ARROW POINTING AWAY FROM THE ACTUATOR – стрелка от приводаARROW POINTING TOWARDS THE ACTUATOR – стрелка к приводу
ARROW POINTING TOWARDS THE ACTUATOR – стрелка к приводуПримечание: для поворотных приводов этот параметр роли не играет.
RATED_TRAVELИндекс: 50Обращение: r, wДиапазон:Значение холодногостарта:
Номинальный ход (мм) или номинальный угол поворота (град.)клапана.
0…255.9
15.0 ммПримечание: размерность параметра (мм или градусы) зависит от значенияпараметра VALVE_TYPE.
SELF_CALIB_CMDИндекс: 55Обращение: r, wВыбор:
Команда для запуска калибровочных операций в полевомприборе.NO TEST, STANDARD OPERATION – нет тестов, норм. режим регулированияZERO CALIBRATION – коррекция нулевой точкиINITIALISATION – инициализацияRESET TOTAL VALVA TRAVEL – сброс абсолютного путевого перемещенияRESET “CONTROL LOOP FAULT” – сброс состояния «неисправн. рег. контура»RESET TRANSDUCER BLOCK TO DEFAULT – выполнить холодный стартблока обработки со стандартными значениями параметров (по умолчанию)ABORT PROCESS IN ACTION – прервать текущее действие

48 Описание параметров
EB 8383-1 RU
SELF_CALIB_STATUSИндекс: 56Обращение: rПоказания:
Статус запущенной через SELF_CALIB_CMDпоследовательности.
UNDETERMINED –не определеноRUNNING – исполняетсяABORTED – прерваноRANGE ERROR – ошибочный диапазонDEFECTIVE MECHANICS/PNEUMATICS – неисправна механика/пневматикаTIMEOUT – превышение установленного времениPROPORTIONAL RANGE RESTRICTED – пропорц. диап. слишком ограниченRATED TRAVEL OR TRANSMISSION ERROR – ошибка выбора раб. хода или
передачиMECHANICAL ERROR – заклинивание мех. системы (при инициализации)PNEUMATICAL ERROR – нет герметичности пневмосистемы (при инициализ.)
INITIALISATION STATUS: DETERMINATION OF MECHNICAL STOPS –(статус инициализации: определение механических упоров)
INITIALISATION STATUS: DETERMINATION OF MINIMUM PULSES –(статус инициализации: определение мин. управляющего импульса)
INITIALISATION STATUS: DETERMINATION OF MINIMUM TRANSIT TIMES –(статус инициализации: определение мин. времен срабатывания)
INITIALISATION ABORTED DUE TO ACTIVATED FORCED VENTING OPTION –(инициализация прервана активированием принудительного сброса воздуха)
ZERO ERROR – ошибка нулевой точкиSUCCESSFUL – успешноNO VALID DATA FROM APPLICATION – некорректные данные от приложений
SELF_CALIB_WARNINGИндекс: 57Обращение: rПоказания:
Дополнительные сигналы предупреждения запущенной черезSELF_CALIB_CMD последовательности.
UNDETERMINED – не определеноWRONG SELECTION OF RATED TRAVEL OR TRANSMISSION –ошибка выбора номинального хода или размера передачи (тяги).AIR LECAGE OF PNEUMATIC SYSTEM – негерметичность
пневмосистемы (приинициализации)
SUCCESSFUL - успешноNO VALID DATE FROM APPLICATION – некорректные данные от
приложений.SERVO_GAIN_1Индекс: 18Обращение: r, wДиапазон:Значение холодногостарта:
Коэффициент пропорциональности питающего давления
0,01…10,0
0,5SERVO_GAIN_2Индекс: 19Обращение: r, wДиапазон:Значение холодногостарта:
Коэффициент пропорциональности выходного воздуха.
0,01…10,0
1,2

49 Описание параметров
EB 8383-1 RU
SERVO_RATEИндекс: 20Обращение: r, wДиапазон:Значение холодногостарта:
Коэффициент усиления дифференцирующей цепочки.
0…1
0.12
STRATEGYИндекс: 3Обращение: r, w
Значение холодногостарта:
Параметр для группировки и, благодаря этому, ускореннойобработки блоков. Группировка реализуется посредствомустановки одинаковых численных значений в параметреSTRATEGY для каждого отдельного блока.
0Примечание: эти данные блоком обработки не проверяются и необрабатываются.
ST_REVИндекс: 1Обращение: r
Индикация ревизии состояния статических данных.
Примечание: ревизия производится при каждом изменениикакого-либо статического параметра в блоке.
TAG_DESCИндекс: 2Обращение: r, wЗначение холодногостарта:
Ввод характерного для данного потребителя текста, максимум32 знака, для более точной идентификации и «привязки» блока.
Текст отсутствует.
TOL_OVERSHOOTИндекс: 36Обращение: r, wДиапазон:Значение холодногостарта:
Допустимое перерегулирование (избыточное отклонение).
0.1…10%
0.5%
TOLERANCE_BANDИндекс: 38Обращение: r, w
Диапазон:Значение холодногостарта:
Диапазон рассогласования.Критерий сброса для текущего контроля контура регулирования.Вводится допустимое рассогласование.См. также параметр DELAY_TIME.0,1…10%
5%
TOTAL_VALVE_TRAVELИндекс: 39Обращение: r
Абсолютное путевое перемещение (путевой интеграл).Сумма рабочих перемещений (двойных ходов).
TOTAL_VALVE_TRAV_LIMИндекс: 40Обращение: r, wДиапазон:Значение холодногостарта:
Предельная величина абсолютного путевого перемещения(путевого интеграла).
0…16 500 000
1 000 000
TRANSDUCER_DIRECTORYИндекс: 9Обращение: r
Примечание:этот параметр прибором тип 3787 не поддерживается.

50 Описание параметров
EB 8383-1 RU
TRANSDUCER_STATEИндекс: 32Обращение: rПоказания:
Состояние блока обработки.
SEE ACTUAL MODE OF TRANSDUCER BLOCK – см. режим работы(MODE_BLK_ACTUAL)FORCED VENTING ACTIVE – активирован принудительный сброс воздухаLOWER TRAVEL LIMIT ACTIVE – активировано ограничение хода снизуUPPER TRAVEL LIMIT ACTIVE – активировании ограничение хода сверхуEND POSITION ACTIVE AT< - активировано «конечное положение при<»END POSITION ACTIVE AT> - активировано «конечное положение при>»
TRANSDUCER_TUPEИндекс: 10Обращение: r
Тип блока обработки. В данном случае “Standard AdvancedPositioner Valve”.
TRANSM_CODEИндекс: 51Обращение: r, w
Ввод:
Ввод:
Код передачи (трансмиссии) (только для интегрированнойконструкции прямоходного привода). Установкагеометрических размеров прямоходной трансмиссии приинтегрированном монтаже.D1, рычаг 64 ммD2, рычаг 106 ммКод передачи (только для поворотного привода).Максимальный угол поворота выбранного сегмента кулачковогодиска.S90, 90-градусный сегментS120, 120-градусный сегмент.Примечание: для поворотных приводов этот параметр влиянияне имеет.
TRANSM_LENGTHИндекс: 52Обращение: r, w
Диапазон:Значение холодногостарта:
Длина передачи (только для конструкции прямоходногопривода по NAMUR) представляет расстояние между точкойвращения рычага, передающего перемещение, и точкой рычага,контактирующей со штифтом перемещения.0…1023 мм
42 ммПримечание: этот параметр применяется только дляпрямоходного привода в конструкции по NAMUR, для другихвидов монтажа он влияния не оказывает.
TRANS_PIN_POSИндекс: 53Обращение: r, wВвод:
Значение холодногостарта:
Положение штифта (только для конструкции прямоходногопривода по NAMUR). Положение штифта на рычагепозиционера. См. маркировку на рычаге позиционера.АВ
АПримечание: этот параметр применяется только дляпрямоходного привода в конструкции по NAMUR, для другихвидов монтажа он влияния не оказывает.
UPDATE_EVTИндекс: 7Обращение: r
Индикация об изменении статических данных блока, включаядату и время.
VALVE_MAN_IDИндекс: 25Обращение: r, w
Характеристика изготовителя клапана, работающего спозиционером.

51 Описание параметров
EB 8383-1 RU
VALVE_MODEL_NUMИндекс: 26Обращение: r, w
Тип/конструкция клапана, работающего с позиционером.
VALVE_SNИндекс: 27Обращение: r, w
Серийный номер клапана, работающего с позиционером.
VALVE_TYPEИндекс: 28Обращение: r, wВвод:
Значение холодногостарта:
Разновидность клапана
UNINITIALIZED – не определеноLINEAR – линейный (клапан с прямолинейно движущимся
регулирующим элементом, прямоходный клапан)ROTARY – поворотный (клапан с регулирующим элементом,
совершающим вращательное движение)OTHER – прочие
линейныйПримечание:прибор тип 3787 может «различать» только прямоходную иповоротную арматуру, значения «не определено» и «прочие»может означать прямоходный клапан.
XD_CAL_LOCИндекс: 29Обращение: r, w
Место последней калибровки.
XD_CAL_DATEИндекс: 30Обращение: r, w
Время последней калибровки.
XD_CAL_WHOИндекс: 31Обращение: r, w
Лицо, выполнявшее последнюю калибровку.
XD_ERRORИндекс: 11Обращение: rПоказания:
Сигнализация неисправностей блока обработки.
NONE (0) – неисправность отсутствует.UNSPECIFIED ERROR – непредусмотренная неисправность
(прибор не инициализируется,происходит инициализация иликоррекция нулевой точки, либопревышено абсолютное путевоеперемещение – путевой интеграл).
GENERAL ERROR – общая неисправность (неисправен весьприбор).
CALIBLATION ERROR – ошибка калибровки (ошибка нулевойточки, внутренней схемы регулированияили инициализации).
CONFIGURATION ERROR – ошибка конфигурации (ошибочныпараметры или характеристика).
ELECTRONICS FAILURE – неисправность в электроникеMECHANICAL FAILURE – неисправность в механикеDATA INTEGRITY ERROR – нарушение целостности данных
(ошибка контрольной суммы).ALGORITHM ERROR – динамические параметры вне
допустимого диапазона

52 Описание параметров
EB 8383-1 RU
XD_ERROR_EXTИндекс: 33Обращение: rПоказания:
Сигнализация расширенного перечня неисправностей в блокеобработки (Transducer Block).
NONE (0) – неисправность отсутствует.FAILURE MECHANICS – неисправность в механике.FAILURE IN MEASUREMENT – ошибка измерений.NOT INITIALISED – позиционер не инициализирован.SELFCALIBRATION FAILED – ошибка при самоадаптации
(инициализации).
ZERO POINT ERROR – ошибка нулевой точки.
INTERNAL CONTROL LOOP DISTURBED – внутренняянеисправность позиционирования. (сброс сообщения оSELF_CALIB_CMD --> RESET “CONTROL LOOP FAULT”).
TRAVEL TIME EXCEEDED – превышено время исполнениякоманды (время срабатывания).(ошибка регулирующего контурасбрасывается самостоятельно).
CHARACTERIZATION INVALID – неправильная характеристика.
FORCED VENTING ACTIVE – активен принудительный сбросвоздуха.
DEVICE UNDER SELFTEST – полевой прибор находится врежиме самотестирования(инициализация или коррекциянулевой точки).
TOTAL VALVE TRAVEL LIMIT EXCEEDED – превышенограничное значение абсолютного путевого перемещения(путевой интеграл).

53 Описание параметров
EB 8383-1 RU
7.4.3. Функциональные блоки (Function Blocks)
Функциональные блоки обладают фундаментальными свойствами автоматизации вданном полевом приборе. Используются различные функциональные блоки, такие,например, как Analog Input Function Block (аналоговый вход), Analog Output FunctionBlock (аналоговый выход), PID Block (PID-регулятор).
Каждый из перечисленных функциональных блоков используется в составе всейсистемы для обработки специфических функций автоматизации. Например,непосредственно в поле могут быть реализованы местные функции регулирования,самодиагностика прибора, а также передаваться на центральную станциюуправления информация о неисправностях контура управления.
Функциональные блоки обрабатывают входные сигналы по специальному,характерному для них алгоритму, на основе записанных в блоках параметров. Онивырабатывают выходные сигналы, которые поступают на обработку в другиефункциональные блоки, связанные друг с другом согласно установленнойконфигурации прибора.
7.4.3.1 Analog Output Function Block (аналоговый выход)
Функциональный блок «Аналоговый выход» получает аналоговый сигнал,поступающий от какого-либо (например, PID-регулятора) включенного перед нимблока и передает управляющий сигнал на другой блок обработки “Transducer Block”(например, позиционер клапана). Блок обработки включает кроме прочего функциимасштабирования (умножения на постоянный коэффициент) и линейного(пилообразного, ступенчатого) наложения – Rampenfunktion.
АО-блок получает заданный параметр в зависимости от режима работы(MODE_BLK) из принимаемых параметров CAS_IN, RCAS_IN или SP. Исходя изэтого и при учете параметров PV_SCALE, SP_HI_LIM и SP_LO_LIM, SP_RATE_UP иSP_RATE_DN в нем образуется соответствующий внутренний сигнал.
Согласно параметрам IO_OPTS и XD_SCALE формируется выходной сигнал OUT,который направляется в подключенный через CHANNEL блок обработки.
АО-блок обладает свойством защитного реагирования (Fault State). Это свойствоактивируется, когда условия, характеризующие неисправность, действуют дольшеопределенного времени, которое задается параметром FSTATE_TIME, либо когдаактивирован параметр SET_FSTATE в приборном блоке.
Свойство защитного реагирования устанавливается со значениями в параметрахFSTATE_TIME, FSTATE_VAL и IO_OPTS.

54 Описание параметров
EB 8383-1 RU
Рис.14 • Analog Output Function Block (функциональный блок «Аналоговый выход»)

55 Описание параметров
EB 8383-1 RU
Параметры функционального блока «Аналоговый выход» (AnalogOutput Function Block)ALERT_KEYИндекс: 4Обращение: r, wВвод:Значение холодн. старта:
Ввод идентификационного номера отдельного узлаоборудования. Эта информация может использоваться Fieldbus-Host-системой для сортировки тревожных сигналов и событий.1…2550Примечание: Значение 0 (значение холодного старта) являетсянедопустимым и потому сопровождается записью в приборесообщения об ошибке.
BKCAL_OUTИндекс: 25Обращение: r
Индицируется аналоговое выходное значение и статус, которыйпри каскадном регулировании будет передаваться в параметрBKCAL_IN предварительно включенного функциональногоблока.Это значение препятствует интегральному насыщениюрегулятора и обеспечивает таким образом «безударное»переключение режимов.
BLOCK_ALMИндекс: 30Обращение: r, w
Индицируется текущее состояние блока с информированием овозникающих ошибках конфигурации, аппаратного обеспеченияили о системных ошибках, включая данные о временисигнализации (дата, время) при возникновении неисправности.Примечание: дополнительно в этой группе параметров можновручную подтверждать (квитировать, сбрасывать?)действующую блочную тревожную сигнализацию.
BLOCK_ERRИндекс: 6Обращение: rПоказания:
Индикация активной (действующей) блочной неисправности.
OUT OF SERVICE – режим блока «ждущий режим».CONFIGURATION ERROR – в блоке ошибка конфигурации.INPUT FAILURE – PV (обратная связь по сигналу положения)
имеет статус «неудовлетворительно», например, если блокобработки находится в режиме O/S.
OUTPUT FAILURE – регулирующий параметр OUT не может выдаваться,например, если блок обработки Transducer Block неинициализирован или находится в режиме “LO”.
CAS_INИндекс: 17Обращение: r, w
Индикация/ установка получаемого от предыдущегофункционального блока входного, управляющего сигнала и егостатуса.
CHANNELИндекс: 22Обращение: r, w в реж O/SЗначение холодн. старта:
Связь между выходом какого-либо функционального блока«Аналоговый выход» (Analog Output Function Block) иаппаратными логическими каналами (Transducer Blocks).0Примечание: чтобы иметь возможность ввода в действиефункционального АО-блока, параметр CHANNEL должен бытьустановлен в корректное состояние. Т.к. в приборе тип 3787имеется только один блок обработки (Standard AdvancedPositioner Valve) значение должно быть установлено = 1.
FSTATE_TIMEИндекс: 23Обращение: r, w
Значение холодногостарта:
Установка времени (в секундах) от момента обнаружениянекорректности заданного для АО-блока значения в текущемрежиме работы до срабатывания предохранительной функции.Если по истечении этого интервала времени неисправностьостается, предохранительная функция срабатывает.0Примечание: предохранительное свойство функциональногоАО-блока назначается в параметре этого блока IO_OPTS.

56 Описание параметров
EB 8383-1 RU
FSTATE_VALИндекс: 24Обращение: r, wВвод:Значение холодногостарта:
Установка заданного значения для функционального АО-блокапри активированном защитном реагировании.
Значение в пределах PV_SCALE±10%
0Примечание: это значение применяется, когда в параметреIO_OPTS выбрана опция “Fault State to value”.
GRANT_DENYИндекс: 13Обращение: r, w
Разрешение или ограничение прав доступа к полевому приборусо стороны Fieldbus-Host-системы.Примечание: этот параметр в приборе тип 3787 не используется.
IO_OPTSИндекс: 14Обращение: r, w в режимеO/SВыбор:
Выбор характеристики вход-выход функционального АО-блока.
SP-PV Track in MAN SP отслеживает PV в режиме (ACTUAL_MODE) MANSP0PV Track in LO SP отслеживает PV в режиме (ACTUAL_MODE) LO
SP Track retained target: SP отслеживает RCAS_IN в зависимости отустановленного TARGET_MODE в режиме работы(ACTUAL_MODE) LO или MAN. Эта опция имеетприоритет по отношению к SP_PV Track in MAN/ LO.
Increase to close Инвертирование выходного значения к блокуобработки Transducer Block (соответствуетнаправлению движения).
Fault State to value При активировании защитного реагирования, вкачестве заданного значения будет использоватьсяFSTATE_VAL (см. FSTATE_VAL, FSTATE_TIME).
Use Fault State Value on restart:При входе прибора в режим параметр FSTATE_VALпредлагается в качестве заданного значения, пока непоявится действительное значение.
Target to MAN if Fault State activated:При активировании защитного реагированиязначение TARGET_MODE (выбранный режим)сбрасывается на MAN (ручной режим),первоначальный целевой режим работы теряется.После выхода из защитного реагирования блокостается в режиме MAN и должен быть установленпользователем в выбранный им режим.
Use PV for BKCAL_OUT:Через BKCAL_OUT вместо рабочего заданногозначения будет выдаваться PV. Если в приборномблоке (Resource Block) параметр FEATURES_SELустановлен в состояние OUT READBACK, тогда черезBKCAL_OUT будет выдаваться текущее положениеклапана.

57 Описание параметров
EB 8383-1 RU
MODE_BLKИндекс: 5Обращение: r, wПоказания:
Индикация текущего режима работы (Actual) АО-блока, выбранного режима(Target), разрешенного режима (Permitted), которые поддерживаются АО-блоком и стандартного режима (Normal).RCASCASAUTOMANO/S
АО-блок поддерживает следующие режимы работы:O/S, Out of Service (ждущий режим)
АО-алгоритм этого модуля не выполняется. В параметре OUT выдаетсяпоследнее значение или при активной неисправности заданное значение.
MAN (ручное управление оператором)Выходное значение АО-блока может задаваться непосредственнопользователем через параметр OUT.
AUTO (автоматический режим)Установленное пользователем заданное значение через параметр SPприменяется при обработке АО-блоком.
CAS (каскадный режим)Функциональный АО-блок для внутреннего расчета управляющеговоздействия получает через параметр CAS_IN управляющий сигналнепосредственно от впереди включенного функционального блока.Используется АО-блок.
RCAS (внешний каскад)Функциональный АО-блок для внутреннего расчета управляющеговоздействия получает через параметр RCAS_IN управляющий сигналнепосредственно от Fieldbus-Host-системы. Используется АО-блок.
OUTИндекс: 9Обращение: r, w в режимеMAN, O/S
Индикация управляющего воздействия, его величины,граничного значения и статуса функционального АО-блока.
Примечание: если в параметре MODE_BLK выбран режимработы MAN (ручное вмешательство оператора), то выходноезначение OUT может задаваться вручную. Применяемаяразмерность (величина) воспринимается от группы параметровXD_SCALE, а диапазон ввода составляет OUT_SCALE ± 10%.
PV (Process Variable)Индекс: 7Обращение: r
Индикация переменных процесса, используемых вфункциональном блоке, включая статус. Применяемаяразмерность (величина) воспринимается от группы параметровPV_SCALE.Примечание: если в приборном блоке (Resource Block) впараметре FEATURES_SEL выбрана опция OUT READBACK, тоPV приобретает текущее положение клапана (согласноFINAL_POSITION_VALUE).
PV_SCALEИндекс: 11Обращение: r, w в режимеMAN, O/SЗначение холодн.:
Назначается диапазон (начальное и конечное значения)физической величины и точность после запятой в значениипеременных процесса (PV).
0…100%RCAS_INИндекс: 26Обращение: r, w
В этом параметре считывается и показывается поступающий отFieldbus-Host-системы аналоговый управляющий сигнал(величина и статус) для внутреннего расчета управляющеговоздействия.Примечание: этот параметр активен только в режиме RCAS.

58 Описание параметров
EB 8383-1 RU
RCAS_OUTИндекс: 28Обращение: r
Индицируется аналоговый управляющий (входной) сигнал послевоздействия Rampen-функции.Его значение через этот параметр поступает в Fieldbus-Host-систему, чтобы провести обратные вычисления при сменерабочего режима или ограничении сигналов.Примечание: этот параметр активен только в режиме RCAS.
READBACKИндекс: 16Обращение: r
Индицируется текущее положение клапана. Это положениерассчитывается исходя из параметра FINAL_POSITION_VALUEсоответствующего блока обработки (Transducer Block).Используемое значение воспринимается от группы параметровXD_SCALE.
SHED_OPTИндекс: 27Обращение: r, w
Выбор:
Значение холодногостарта:
Выбор реагирования при превышении контрольного времени(см. параметр SHED_RCAS в приборном блоке) в ходе проверкисоединения между Fieldbus-Host-системой и АО-блоком врежиме работы RCAS. По истечении контрольного времени АО-блок изменяет режим работы RCAS на выбранный здесь режим.Также задается реагирование по окончании состояния ошибки.
Uninitialized: не инициализированNormalShed_NormalReturn:
смена на следующий, возможный режим работы, а приисчезновении условий неисправности следует возврат врежим работы RCAS.
NormalShed_NoReturn:смена на следующий, возможный режим работы, а приисчезновении условий неисправности режим блока неизменяется.
ShedToAuto_NormalReturn:смена на режим AUTO, а при исчезновении условийнеисправности возврат в режим работы RCAS.
ShedToAuto_NoReturn:смена на режим AUTO, а при исчезновении условийнеисправности блок остается в режиме работы AUTO.
ShedToManual_NormalReturn:смена на режим MANUAL, а при исчезновении условийнеисправности возврат в режим работы RCAS.
ShedToManual_NoReturn:смена на режим MANUAL, а при исчезновении условийнеисправности блок остается в режиме работыMANUAL.
ShedToRetainedTarget_NormalReturn:смена на следующий, возможный режим работы, а приисчезновении условий неисправности следует возврат врежим работы RCAS.
ShedToRetainedTarget_NoReturn:смена на следующий, возможный режим работы, а приисчезновении условий неисправности режим блока неизменяется.
Uninitialized
Примечание:этот параметр АО-блока активен только в режиме работы RCAS.Если установлено значение “Uninitialized”, то АО-блокневозможно перевести в режим RCAS.

59 Описание параметров
EB 8383-1 RU
SIMULATEИндекс: 10Обращение: r, w
С помощью этой функции можно имитировать величину и статуспеременной процесса PV блока.Примечание: в ходе имитации величина переменной от OUT непередается на блок обработки (Transducer Block). Блокобработки удерживает последнее действовавшее значениеперед активированием имитации. Активирование имитациивозможно только когда в приборе включен переключательразрешения имитации (см. также приборный блок).
SPИндекс: 8Обращение: r, wв режимах AUTO, MAN, O/SВвод:
Ввод заданного значения (управляющий, входной сигнал) врежиме работы AUTO.Применяемая величина воспринимается из группы параметровPV_SCALE.Значение и диапазон PV_SCALE ± 10%.
SP_HI_LIMИндекс: 20Обращение: r, wВвод:Значение холодногостарта:
Ввод верхнего граничного значения управляющего (входного)сигнала.
Значение и диапазон PV_SCALE ± 10%.
100Примечание: если установка окончания шкалы в параметреPV_SCALE будет изменена, то это значение должно бытьсоответствующим образом согласовано.
SP_LO_LIMИндекс: 21Обращение: r, wВвод:Значение холодногостарта:
Ввод нижнего граничного значения управляющего (входного)сигнала.
Значение и диапазон PV_SCALE ± 10%.
0Примечание: если установка окончания шкалы в параметреPV_SCALE будет изменена, то это значение должно бытьсоответствующим образом согласовано.
SP_RATE_DNИндекс: 18Обращение: r, wЗначение холодногостарта:
Ввод Rampen-крутизны для спадающего изменения сигнала врежиме работы AUTO.
3402823466 х 1038
Примечание: при вводе значения, равного «0», сигнал заданногозначения используется напрямую.Ограничение скорости изменения активно для выходных блоковв режимах AUTO и CAS.
SP_RATE_UPИндекс: 19Обращение: r, wЗначение холодногостарта:
Ввод Rampen-крутизны для возрастающего изменения сигнала врежиме работы AUTO.
3402823466 х 1038
Примечание: при вводе значения, равного «0», сигнал заданногозначения используется напрямую.
ST_REVИндекс: 1Обращение: r
Индикация состояния ревизии статических данных.
Примечание: ревизия производится при каждом изменениикакого-либо статического параметра в блоке.

60 Описание параметров
EB 8383-1 RU
STATUS_OPTSИндекс: 15Обращение: r, w в O/SВыбор:
Значение холодногостарта:
Выбор имеющихся в распоряжении опций статуса,предназначенных для установки вида его обработки:
Uninitialized – не инициализированPropagate Fault Backward – статус блока обработки через статус
BKCAL_OUT направляется навпереди включенный блок.
Uninitialized
STRATEGYИндекс: 3Обращение: r, wЗначение холодногостарта:
Параметр для группировки и, благодаря этому, ускореннойобработки блоков. Группировка реализуется посредствомустановки одинаковых численных значений в параметреSTRATEGY для каждого отдельного блока.
0Примечание: эти данные приборным блоком ни проверяются, ниобрабатываются.
TAG_DESKИндекс: 2Обращение: r, wЗначение холодногостарта:
Ввод характерного для данного потребителя текста, максимум32 знака, для более точной идентификации и «привязки» блока.
текст отсутствует.
UPDATE_EVTИндекс: 29Обращение: r
Индикация об изменении статических данных блока, включаядату и время.
XD_SCALEИндекс: 12Обращение: r, wв режимах AUTO, MAN, O/SЗначение холодногостарта:
Назначается диапазон (начальное и конечное значения)физической величины и точность после запятой в значенииуправляющего параметра (OUT). Задается в [%], [mm] или[градус].
0…100%
Примечание.при использовании размерности [%] значение для OUTмасштабируется относительно 100%.При использовании размерности [mm] (для прямоходногоклапана) или [градус] (для поворотного клапана) установленноев параметре RATED_TRAVEL блока обработки значениемасштабируется как 100%.

61 Описание параметров
EB 8383-1 RU
7.4.3.2 Функциональный PID-блок (PID-регулятор)Функциональный PID-блок содержит входной канал, пропорциональныйинтегродифференцирующий канал (PID) и аналоговый выходной канал.Конфигурация PID-блока (PID-регулятора) зависит от конкретных задачавтоматизации.Могут быть реализованы простые схемы регулирования: регулирования с подачейвозмущающего воздействия, каскадного регулирования с ограничением всоединении с другим регулирующим блоком.Для обработки измеряемого параметра в PID-блоке имеются следующиевозможности.Масштабирование и ограничение сигнала, управление режимом работы, подачавозмущающего воздействия, ограничительное регулирование, определениеаварийной ситуации и трансляция статуса сигнала.PID-блок (PID-регулятор) может обеспечивать различные стратегии регулирования.Он обладает гибким алгоритмом регулирования, конфигурируемым в зависимости отконкретного случая применения.PID-блок получает регулирующий сигнал в зависимости от режима работы(MODE_BLK) в виде входного параметра CAS_IN, RCAS_IN либо SP. Исходя изэтого, а также при учете PV_SCALE, SP_HI_LIM и SP_LO_LIM, SP_RATE_UP иSP_RATE_DN вырабатывается внутренний сигнал заданного значения.Текущее значение блок получает через входную переменную IN. Исходя из этого, ипри учете PV_SCALE и фильтра 1-го порядка PV_TIME образуется переменнаяпроцесса PV.Оба сигнала поступают на обработку согласно внутреннему PID-алгоритму. Этоталгоритм (PID-регулирования) включает пропорциональную, интегрирующую идифференцирующую обработку сигнала. Управляющий сигнал рассчитывается наоснове величины рассогласования между сигналами заданного значения SP ипеременной процесса PV (текущее значение).Отдельные части PID-регулятора следующим образом воздействуют на процессрасчета управляющего сигнала.
Пропорциональная часть.На изменение заданного значения SP или переменной процесса PV (текущеезначение) пропорциональная часть реагирует линейно. Через коэффициентпропорциональности GAIN происходит изменение управляющего сигнала,который будучи умноженным на величину рассогласования соответствуеткоэффициенту усиления. Если регулятор работает только спропорциональной частью, то процесс регулирования сопровождаетсянекоторой постоянной величиной рассогласования (ошибки).
Интегрирующая часть.Постоянная величина рассогласования (ошибки), возникающая при расчетеуправляющего сигнала в пропорциональной части регулятора, поступает винтегрирующую часть и подвергается интегрированию в течение такоговременного интервала, при котором величина ошибки окажетсяпренебрежимо мала. Функция интегрирования корректирует управляющийсигнал в зависимости от величины и длительности рассогласования. Есливеличина временного интервала интегрирования RESET сбрасывается донуля, то регулятор будет работать как Р- или PD-регулятор.

62 Описание параметров
EB 8383-1 RU
Влияние интегрирующей части на процесс регулирования возрастает, когдавеличина времени интегрирования RESET увеличивается.
Дифференцирующая часть.В условиях регулирования с большой инерционностью процесса, например, прирегулировании температуры, имеет смысл использовать дифференцирующуючасть регулятора. Посредством дифференцирующей части с параметром RATEпроизводится расчет управляющего сигнала в зависимости от изменениярассогласования.
Согласно параметрам OUT_SCALE, OUT_HI_LIM и OUT_LO_LIM из управляющегосигнала выделяется выходное значение OUT, которое поступает на следующийфункциональный блок.
Через параметр STATUS_OPTS можно в зависимости от статуса входных сигналовPID-блока влиять на статус выходного значения OUT. Посредством этого, например,можно активировать защитное реагирование включенного после PID-блокавыходного блока.
Параметр BYPASS позволяет осуществлять прямую подачу внутреннего задающегосигнала вместо управляющего сигнала.
Через входную переменную FF_VAL возможна подача возмущающего воздействия,а TRK_IN_D и TRK_VAL прямое управление выходным сигналом.
возмущающее системавоздействие слежения
Рис.15 • Функциональный PID-блок (PID-регулятор)

63 Описание параметров
EB 8383-1 RU
Параметры функционального PID-блокаACK_OPTIONИндекс: 46Обращение: r, w
Выбор:
Значение холодн. старта:
Через этот параметр можно выбирать, будет ли ситуациятревоги в момент ее выявления автоматически (без воздействияFieldbus-Host-системы) подтверждаться (сбрасываться?) всамом приборе.Undefined – выбор не установленHI_HI_ALM – тревога при верхнем граничном значенииHI_ALM – предупреждение о верхнем граничном значенииLO_LO_ALM – тревога при нижнем граничном значенииLO_ALM – предупреждение о нижнем граничном значенииDV_HI_ALM – тревога граничного значения для верхнего рассогласованияDV_LO_ALM – тревога граничного значения для нижнего рассогласованияBLOCK_ALM – блочная тревогаUndefined – выбор не установлен
Примечание:тревожное сообщение посылается в Fieldbus-Host-систему, ноею не подтверждается (квитируется, сбрасывается?).
ALARM_HYSИндекс: 47Обращение: r, w
Ввод:Значение холод. старта:
Установка величины гистерезиса для верхней и нижней граництревоги. Условия аварийной ситуации остаются активны до техпор, пока измеряемый параметр находится в пределах зоныгистерезиса. Величина гистерезиса действует в следующихграницах функционального PID-блока:HI_HI_LIMHI_LIMLO_LO_LIMLO_LIMDV_HI_LIMDV_LO_LIM0…50%0,5%
Примечание:величина гистерезиса выражается в процентах от диапазонагруппы параметров PV_SCALE функционального PID-блока.
ALARM_SUMИндекс: 45Обращение: r, wПоказания:
Индикация текущего статуса тревожных сигнализаций процессав функциональном PID-блоке.
HI_HI_ALM – нарушение верхней границы тревогиHI_ALM – нарушение верхней границы предупредительной тревогиLO_LO_ALM – нарушение нижней границы тревогиLO_ALM – нарушение нижней границы предупредительной тревогиDV_HI_ALM – нарушение границы тревоги для верхнего рассогласованияDV_LO_ALM – нарушение границы тревоги для нижнего рассогласованияBLOCK_ALM – блочная тревога
Примечание:дополнительно в этой группе параметров можно деактивироватьтревожные сигнализации процесса.

64 Описание параметров
EB 8383-1 RU
ALERT_KEYИндекс: 4Обращение: r, w
Ввод:Значение холодногостарта:
Ввод идентификационного номера отдельного узлаоборудования. Эта информация может использоваться Fieldbus-Host-системой для сортировки тревожных сигналов и событий.
1…255
0Примечание: Значение 0 (значение холодного старта) являетсянедопустимым и потому при записи в прибор сопровождаетсясообщением об ошибке.
BAL_TIMEИндекс: 25Обращение: r, wЗначение холодногостарта:
Ввод временной константы, посредством которойобеспечивается противодействие насыщению интегрирующейчасти регулятора (расчетный управляющий сигнал >OUT_HI_LIM или < OUT_LO_LIM).0Примечание: при значении 0 (значение холодного старта)насыщение немедленно снимается.
BKCAL_HYSИндекс: 30Обращение: r, w
Ввод:Значение холодногостарта:
Ввод величины гистерезиса для верхней и нижней границыуправляющего сигнала OUT_HI_LIM и OUT_LO_LIM.Если расчетный управляющий сигнал выходит за пределыдиапазона, то этот выход индицируется в параметре OUT ипередается на последующие блоки.Это состояние выхода за границы диапазона остается активнымдо тех пор, пока величина расчетного управляющего сигнала невыйдет за границы заданного гистерезиса.0…50%
0,5%BKCAL_INИндекс: 27Обращение: r, w
Индицируется аналоговое выходное значение и статус, которыйпри каскадном регулировании будет восприниматься отпараметра BKCAL_OUT последующего включенногофункционального блока.Это значение обеспечивает отслеживание изменения выходногосигнала и реализует, таким образом, «безударное»переключение режимов.
BKCAL_OUTИндекс: 31Обращение: r, w
Индицируется аналоговое выходное значение и статус, которыйпри каскадном регулировании будет передаваться в параметрBKCAL_IN предварительно включенного функциональногоблока. Этот параметр препятствует интегральному насыщениюрегулятора и обеспечивает, таким образом, «безударное»переключение режимов.
BLOCK_ALMИндекс: 44Обращение: r, w
Индицируется текущее состояние блока с информированием овозникающих ошибках конфигурации, аппаратного обеспеченияили о системных ошибках, включая данные о временисигнализации (дата, время) при возникновении неисправности.
Примечание: дополнительно в этой группе параметров можновручную подтверждать (сбрасывать?) действующую блочнуютревожную сигнализацию.
BLOCK_ERRИндекс: 6Обращение: rПоказания:
Индикация текущей блочной неисправности.
OUT OF SERVICE – блочный режим «Ждущий режим».CONFIGURATION ERROR – в блоке присутствует ошибка конфигурации

65 Описание параметров
EB 8383-1 RU
BYPASSИндекс: 17Обращение: r, w в режимеMAN, O/SВыбор:
Значение холодногостарта:
Через этот параметр можно включать или выключать расчетуправляющего сигнала через алгоритм PID-регулирования.
Uninitialized – соответствует состоянию ON (ВКЛ)OFF (ВЫКЛ) – обход PID-регулятора выключен и вычисляемый
согласно PID – алгоритму управляющий сигналвыдается через параметр OUT.
ON (ВКЛ) - включен BAYPASS (обход) PID-регулятора иуправляющий в виде SP напрямую выдаетсячерез параметр OUT.
Uninitialized
Примечание: при установке «Uninitialized» блок остается вждущем режиме работы «O/S».Для активирования состояния «BYPASS» (см. установку ON)байпас необходимо задействовать в опциях регулирования(параметр CONTROL_OPTS).
CAS_INИндекс: 18Обращение: r, w
Индицируется/задается аналоговый управляющий сигнал (и егостатус), воспринимаемый от впереди включенногофункционального блока.
CONTROL_OPTSИндекс: 13Обращение: r, w в режимеMAN, O/SВыбор:
Значение холод. старта:
Выбор имеющихся опций регулятора для реализациинеобходимой стратегии регулирования.
Bypass Enable: задействование параметра BYPASS.Direct Acting: прямое управляющее воздействие.Track Enable: задействование следящего регулирования.Track in Manual: следящее регулирование вручную.PV for BKCAL_OUT:использовать величину и статус параметра
PV для параметра BKCAL_OUT.
No OUT Limits in Manual: нет выходного ограничения в режимеработы «ВРУЧНУЮ».
NoneDV_HI_ALMИндекс: 64Обращение: r, w
Индикация статуса тревожной сигнализации для верхнегорассогласования, включая данные момента тревоги (дата,время) и параметра, который вызвал ее срабатывание.Регулирующий параметр превосходит управляющий навеличину большую, чем заданную в параметре DV_HI_LIM.Примечание: дополнительно в этой группе параметров можновручную подтверждать (квитировать) активную сигнализациютревоги.
DV_HI_LIMИндекс: 57Обращение: r, w
Значение холод. старта:
Установка граничной величины для верхнего рассогласования.Если регулируемый (выходной) параметр превосходит (входное)управляющее воздействие на эту величину, вырабатываетсяпредварительная тревога DV_HI_ALM.3402823466 х 1038
DV_HI_PRIИндекс: 56Обращение: r, w
Ввод:
Задается реагирование в случае превышения верхнегорассогласования (DV_HI_LIM).0 нарушение границы для верхнего рассогласования не
используется;1 не извещается при нарушении граничного значения для
верхнего рассогласования;

66 Описание параметров
EB 8383-1 RU
Значение холод. старта:
2 резервируется для блочных сигнализаций;3…7 о нарушении граничного значения для верхнего рассогласования будет сообщаться в виде пояснения пользователю согласно приоритету (3=низкий приоритет, 7=высокий приоритет);8…15 о нарушении граничного значения для верхнего рассогласования будет сообщаться в виде сигнализации критической тревоги согласно приоритету (8=низкий приоритет, 15=высокий приоритет).0
DV_LO_ALMИндекс: 65Обращение: r, w
Индикация статуса тревожной сигнализации для нижнегорассогласования, включая данные момента тревоги (дата,время) и параметра, который вызвал ее срабатывание.Регулирующий параметр падает ниже управляющего навеличину большую, чем заданную в параметре DV_LO_LIM.Примечание: дополнительно в этой группе параметров можновручную подтверждать (квитировать) активную сигнализациютревоги.
DV_LO_LIMИндекс: 59Обращение: r, w
Значение холод. старта:
Установка граничной величины для нижнего рассогласования.Если регулируемый (выходной) параметр падает ниже(входного) управляющего воздействия на эту величину,вырабатывается предварительная тревога DV_LO_ALM.-3402823466 х 1038
DV_LO_PRIИндекс: 58Обращение: r, wВвод:
Значение холод. старта:
Задается реагирование в случае падения ниже верхнего(вероятно, ошибка в тексте, а должно быть «нижнего»)рассогласования (DV_HI_LIM).
0 нарушение границы для нижнего рассогласования неиспользуется;
1 не извещается при нарушении граничного значения длянижнего рассогласования;
2 резервируется для блочных сигнализаций;3…7 о нарушении граничного значения для нижнего рассогласования будет сообщаться в виде пояснения пользователю согласно приоритету (3=низкий приоритет, 7=высокий приоритет);8…15 о нарушении граничного значения для нижнего рассогласования будет сообщаться в виде сигнализации критической тревоги согласно приоритету (8=низкий приоритет, 15=высокий приоритет).0
FF_GAINИндекс: 42Обращение: r, w в режимеMAN, O/SЗначение холод. старта:
Задается усиление возмущающего воздействия.
0Примечание: усиление возмущающего воздействия умножаетсяна величину возмущающего воздействия (FF_VAL). Результатсуммируется с выходным значением OUT.
FF_SCALEИндекс: 41Обращение: r, w в режимеMAN, O/S
Значение холод. старта:
Назначается диапазон измерений (нижняя или верхняя граница),физическая размерность (единица) и точность после запятой взначении возмущающего сигнала (FF_VAL).
0…100%

67 Описание параметров
EB 8383-1 RU
FF_VALИндекс: 40Обращение: r, wВвод:
Индикация и ввод значения и статуса возмущающеговоздействия.
Диапазон и размерность в FF_SCALE.Примечание: возмущающее воздействие умножается наусиление (FF_GAIN). Результат суммируется на выходе OUT.
GAINИндекс: 23Обращение: r, wЗначение холод. старта:
Ввод пропорционального усиления (коэффициент).
0Примечание: параметр должен иметь значение не равное «0». Впротивном случае в параметре BLOCK_ERR установитсясостояние ошибки конфигурации и блок перейдет в режим O/S.
GRANT_DENYИндекс: 12Обращение: r, w
Разрешение или ограничение прав доступа к полевому приборусо стороны Fieldbus-Host-системы.Примечание: этот параметр в приборе тип 3787 не используется.
HI_ALMИндекс: 61Обращение: r, w
Индикация статуса тревоги для предупреждения о верхнемграничном значении (HI_LIM), включая данные момента тревоги(дата, время) и параметра, который вызвал ее срабатывание.
Примечание: значение параметра воспринимается из параметраPV_SCALE. Дополнительно в этой группе параметров можновручную подтверждать (квитировать) активную сигнализациютревоги.
HI_HI_ALMИндекс: 60Обращение: r, w
Индикация статуса тревоги для верхнего граничного значения(HI_HI_LIM), включая данные момента тревоги (дата, время) ипараметра, который вызвал ее срабатывание.
Примечание: значение параметра воспринимается из параметраPV_SCALE. Дополнительно в этой группе параметров можновручную подтверждать (квитировать) активную сигнализациютревоги.
HI_HI_LIMИндекс: 49Обращение: r, wВвод:
Значение холод. старта:
Установка граничного значения для тревоги по верхнемупараметру (HI_HI_ALM).Если PV превысит эту границу, будет выдан параметр статусатревоги HI_HI_ALM.Диапазон и значение из PV_SCALE.
3402823466 х 1038
HI_HI_PRIИндекс: 48Обращение: r, wВвод:
Значение холод. старта:
Задается реагирование в случае превышения значения верхнейграницы тревоги (HI_HI_LIM).
0 нарушение верхней границы тревоги не используется;1 не извещается при нарушении верхней границы тревоги;2 резервируется для блочных сигнализаций;3…7 о нарушении верхней границы тревоги будет сообщаться в виде пояснения пользователю согласно приоритету (3=низкий приоритет, 7=высокий приоритет);8…15 о нарушении верхней границы тревоги будет сообщаться в виде сигнализации критической тревоги согласно приоритету (8=низкий приоритет, 15=высокий приоритет).0

68 Описание параметров
EB 8383-1 RU
HI_LIMИндекс: 51Обращение: r, w
Ввод:
Значение холод. старта:
Установка граничного значения для предупредительнойтревоги по верхнему параметру (HI_ALM).Если PV превысит эту границу, будет выдан параметр статусатревоги HI_ALM.Диапазон и значение из PV_SCALE.
3402823466 х 1038
HI_PRIИндекс: 50Обращение: r, wВвод:
Значение холод. старта:
Задается реагирование в случае превышения верхней границыпредупредительной тревоги (HI_LIM).
0 нарушение верхней границы предупредительной тревоги не используется;1 не извещается при нарушении верхней границы предупредит. тревоги;2 резервируется для блочных сигнализаций;3…7 о нарушении верхней границы предупредительной тревоги будет сообщаться в виде пояснения пользователю согласно приоритету (3=низкий приоритет, 7=высокий приоритет);8…15 о нарушении верхней границы предупредительной тревоги будет сообщаться в виде сигнализации критической тревоги согласно приоритету (8=низкий приоритет, 15=высокий приоритет).0
INИндекс: 15Обращение: r, w
Индикация и ввод состояния аналоговой величинырегулируемого (выходного) параметра.
LO_ALMИндекс: 62Обращение: r, w
Индикация статуса тревоги для предупреждения о нижнемграничном значении (LO_LIM), включая данные момента тревоги(дата, время) и параметра, который вызвал ее срабатывание.
Примечание: значение статуса параметра тревогивоспринимается из параметра PV_SCALE.
LO_LO_ALMИндекс: 63Обращение: r, w
Индикация статуса тревоги для нижнего граничного значения(LO_LO_LIM) , включая данные момента тревоги (дата, время) ипараметра, который вызвал ее срабатывание.
Примечание: значение параметра воспринимается из параметраPV_SCALE. Дополнительно в этой группе параметров можновручную подтверждать (квитировать) активную сигнализациютревоги.
LO_LO_LIMИндекс: 55Обращение: r, w
Ввод:
Значение холод. старта:
Установка граничного значения для тревоги по нижнемупараметру (LO_LO_ALM).Если PV падает ниже этой границы, будет выдан параметрстатуса тревоги LO_LO_ALM.Диапазон и значение из PV_SCALE.
-3402823466 х 1038

69 Описание параметров
EB 8383-1 RU
LO_LO_PRIИндекс: 54Обращение: r, wВвод:
Значение холодн. старта:
Задается реагирование в случае падения ниже нижнегограничного значения для тревоги по нижнему параметру(LO_LO_LIM).
0 нарушение нижней границы тревоги не используется;1 не извещается при нарушении нижней границы тревоги;3 резервируется для блочных сигнализаций;3…7 о нарушении нижней границы тревоги будет сообщаться в виде пояснения пользователю согласно приоритету (3=низкий приоритет, 7=высокий приоритет);8…15 о нарушении нижней границы тревоги будет сообщаться в виде сигнализации критической тревоги согласно приоритету (8=низкий приоритет, 15=высокий приоритет).0
LO_LIMИндекс: 53Обращение: r, wВвод:
Значение холодн. старта:
Установка граничного значения для предупредительнойтревоги по нижнему параметру (LO_ALM).Если величина PV упадет ниже значения этой границы, будетвыдан параметр статуса тревоги LO_ALM.Диапазон и значение из PV_SCALE.
-3402823466 х 1038
LO_PRIИндекс: 52Обращение: r, wВвод:
Значение холодн. старта:
Задается реагирование в случае падения ниже нижней границыпредупредительной тревоги (LO_LIM).
0 нарушение нижней границы предупредительной тревоги не используется;1 не извещается при нарушении нижней границы предупредит. тревоги;2 резервируется для блочных сигнализаций;3…7 о нарушении нижней границы предупредительной тревоги будет сообщаться в виде пояснения пользователю согласно приоритету (3=низкий приоритет, 7=высокий приоритет);8…15 о нарушении нижней границы предупредительной тревоги будет сообщаться в виде сигнализации критической тревоги согласно приоритету (8=низкий приоритет, 15=высокий приоритет).0
MODE_BLKИндекс: 5Обращение: r, w
Показания:
Индикация текущего (Actual) режима работы PID-блока,назначенного (Target) режима, разрешенного (Permitted)режима, которые поддерживает PID-блок, а также стандартного(Normal) режима.
ROUTRCASCASAUTOMANOOS
PID-блок поддерживает следующие режимы работы.O/S, Out of Service (ждущий режим)
PID-алгоритм модуля не используется. В параметре OUTсодержится последнее значение, либо призадействованной подаче возмущающего воздействиявыдается его заданная величина.
MAN (ручное управление со стороны оператора)Выходной сигнал блока через параметр OUT можетустанавливаться непосредственно оператором.

70 Описание параметров
EB 8383-1 RU
AUTO (автоматический режим)Заданное пользователем значение регулирующего сигналаиспользуется через параметр SP для работы внутреннегоPID-алгоритма.
CAS (каскадный режим)Функциональный PID-блок для внутреннего расчетауправляющего воздействия получает входнойуправляющий сигнал через параметр CAS_INнепосредственно от впереди включенного функциональногоблока. Используется внутренний PID-алгоритм.
RCAS (внешний каскад)Функциональный PID-блок для внутреннего расчетауправляющего воздействия получает входнойуправляющий сигнал через параметр RCAS_INнепосредственно от Fieldbus-Host-системы. Используетсявнутренний PID-алгоритм.
ROUT (внешний выход)Функциональный PID-блок для внутреннего расчетауправляющего воздействия получает входнойуправляющий сигнал через параметр ROUT_INнепосредственно от Fieldbus-Host-системы. Управляющеевоздействие выдается через параметр OUT, а обработка повнутреннему PID-алгоритму исключается.
OUTИндекс: 9Обращение: r, w в режимеMAN, O/S
Индикация управляющего воздействия, величины, граничногозначения и статуса функционального PID-блока.
Примечание: если в параметре MODE_BLK выбран режимработы MAN (ручное управление со стороны оператора), товыходное воздействие OUT может устанавливаться вручную.Используемая величина воспринимается от группы параметровOUT_SCALE, а входной диапазон составляет OUT_SCALE± 10%.
OUT_HI_LIMИндекс: 28Обращение: r, wВвод:Значение холод. старта:
Ввод верхнего граничного значения для аналоговой величиныуправляющего сигнала OUT.
диапазон OUT_SCALE± 10%. величины OUT_SCALE.100
OUT_LO_LIMИндекс: 29Обращение: r, wВвод:Значение холод. старта:
Ввод нижнего граничного значения для аналоговой величиныуправляющего сигнала OUT.
диапазон OUT_SCALE± 10%. величины OUT_SCALE.0
OUT_SCALEИндекс: 11Обращение: r, w в режимеMAN, O/SЗначение холод. старта:
Установка диапазона (начального и конечного значений)физической величины и точности после запятой в значенииуправляющего сигнала OUT.
100%PVИндекс: 7Обращение: r
Индикация применяемой в данной конструкцией переменнойпроцесса PV, включая ее статус.Примечание: используемая величина воспринимается из группыпараметров PV_SCALE.
PV_FTIMEИндекс: 16Обращение: r, wЗначение холод. старта:
Ввод постоянной времени (в сек) фильтра первого порядка.Это время требуется, чтобы 63% от изменения регулируемогопараметра на входе IN оставить действующим в значении PV.0 сек.

71 Описание параметров
EB 8383-1 RU
PV_SCALEИндекс: 10Обращение: r, w в режимеMAN, O/SЗначение холод. старта:
Установка диапазона (начального и конечного значений)физической величины и точности после запятой в значениипеременной процесса (PV).
100%RATEИндекс: 26Обращение: r, wЗначение холод. старта:
Установка постоянной времени для функциидифференцирования.
0 сек.RCAS_INИндекс: 32Обращение: r, w
В этом параметре аналоговый управляющий сигнал (величина истатус), поступающий от Fieldbus-Host-системы, считывается ииндицируется с целью внутреннего расчета управляющеговоздействия.Примечание: этот параметр активен только в режиме работыRCAS.
RCAS_OUTИндекс: 35Обращение: r
Индицируется аналоговый управляющий (входной) сигнал послевоздействия Rampen-функции.Его значение через этот параметр поступает в Fieldbus-Host-систему, чтобы провести обратные вычисления при сменерабочего режима или ограничении сигналов.Примечание: этот параметр активен только в режиме RCAS.
RESETИндекс: 24Обращение: r, wЗначение холод. старта:
Установка постоянной времени для функции интегрирования.
3402823466 х 1038
Примечание: функция интегрирования выключается при вводепостоянной времени 0 сек.
ROUT_INИндекс: 33Обращение: r, w
В этом параметре считывается и показывается поступающее отFieldbus-Host-системы управляющее воздействие (величина истатус).Примечание: этот параметр активен только в режиме ROUT.
ROUT_OUTИндекс: 36Обращение: r
В этом параметре считывается и показывается аналоговыйуправляющий сигнал (величина и статус), который был прочитанчерез параметр ROUT_IN.Его величина предоставляется в распоряжение Fieldbus-Host-системы через этот параметр, чтобы провести обратныевычисления при смене рабочего режима или ограничениисигналов.Примечание: этот параметр активен только в режиме ROUT.
SHED_OPTИндекс: 34Обращение: r, w
Выбор:
Выбор реагирования при превышении контрольного времени(см. параметр SHED_RCAS в приборном блоке) в ходе проверкисоединения между Fieldbus-Host-системой и PID-блоком врежимах работы RCAS или ROUT. По истечении контрольноговремени PID-блок изменяет режим работы RCAS или ROUT навыбранный здесь режим. Также задается реагирование поокончании состояния ошибки.Uninitialized: не инициализированNormalShed_NormalReturn:
смена на следующий, возможный режим работы, а приисчезновении условий неисправности следует возврат врежим работы RCAS или ROUT.
NormalShed_NoReturn:смена на следующий, возможный режим работы, а приисчезновении условий неисправности блок режима неменяет.

72 Описание параметров
EB 8383-1 RU
Значение холод. старта:
ShedToAuto_NormalReturn:смена на режим AUTO, а при исчезновении условийнеисправности возврат в режим работы RCAS или ROUT.
ShedToAuto_NoReturn:смена на режим AUTO, а при исчезновении условийнеисправности блок остается в режим работы AUTO.
ShedToManual_NormalReturn:смена на режим MANUAL, а при исчезновении условийнеисправности возврат в режим работы RCAS или ROUT.
ShedToManual_NoReturn:смена на режим MAN, а при исчезновении условийнеисправности блок остается в режим работы MAN.
ShedToRetainedTarget_NormalReturn:смена на следующий, возможный режим работы, а приисчезновении условий неисправности следует возврат врежим работы RCAS или ROUT.
ShedToRetainedTarget_NoReturn:смена на следующий, возможный режим работы, а приисчезновении условий неисправности блок режима работыне меняет.
UninitializedПримечание: этот параметр PID-блока активен только в режимеработы RCAS или ROUT. Если установлено значениеUninitialized, то PID-блок невозможно перевести в режим RCASили ROUT.
SPИндекс: 8Обращение: r, w врежимах AUTO, MAN, O/SВвод:
Устанавливается заданное значение (управляющеговоздействия) в режиме работы AUTO.
значение и диапазон PV_SCALE ± 10%.SP_HI_LIMИндекс: 21Обращение: r, wВвод:Значение холод. старта:
Установка верхней границы заданного значения (управляющеговоздействия).
значение и диапазон PV_SCALE ± 10%.100Примечание: если установка окончания шкалы в параметрезначение и диапазон PV_SCALE изменится, рассматриваемыйздесь параметр должен быть также согласован (подогнан).
SP_LO_LIMИндекс: 22Обращение: r, wВвод:Значение холод. старта:
Установка нижней границы заданного значения (управляющеговоздействия).
значение и диапазон PV_SCALE ± 10%.0Примечание: если установка окончания шкалы в параметрезначение и диапазон PV_SCALE изменится, рассматриваемыйздесь параметр должен быть также согласован (подогнан).
SP_RATE_DNИндекс: 19Обращение: r, wЗначение холод. старта:
Установка крутизны Rampen-функции для спадающегоизменения заданного значения в режиме работы AUTO.
3402823466 х 1038
Примечание: при вводе значения, равного «0», сигнал заданногозначения используется напрямую.Ограничение скорости изменения активно для регулирующихблоков только в режиме AUTO.

73 Описание параметров
EB 8383-1 RU
SP_RATE_UPИндекс: 20Обращение: r, wЗначение холод. старта:
Установка крутизны Rampen-функции для возрастающегоизменения заданного значения в режиме работы AUTO.
3402823466 х 1038
Примечание: при вводе значения, равного «0», сигнал заданногозначения используется напрямую.Ограничение скорости изменения активно для регулирующихблоков только в режиме AUTO.
ST_REVИндекс: 1Обращение: r
Индикация состояния ревизии статических данных.Примечание: ревизия производится при каждом изменениикакого-либо статического параметра в блоке.
STATUS_OPTSИндекс: 14Обращ.: r, w в режиме O/SВыбор:
Значение холод. старта:
Выбор имеющихся в распоряжении опций статуса для заданияобработки статуса.
Uninitialized: не инициализированIFS if Bad IN:
задействовать состояние включенного далеефункционального АО-блока как сбойное, если регулируемыйпараметр (IN) изменит свой статус на BAD (плохой).
IFS if Bad CAS_IN:задействовать состояние сбоя, если внешний управляющийпараметр (CAS_IN) изменит свой статус на BAD.
Use Uncertain as Good:статус UNCERTAIN используется в качестве GOOD(хороший).
Target In Manual if Bad IN:переход в режим MAN, если регулируемый параметризменит свой статус на BAD.
UninitializedSTRATEGYИндекс: 3Обращение: r, w
Значение холод. старта:
Параметр для группировки и, благодаря этому, ускореннойобработки блоков. Группировка реализуется посредствомустановки одинаковых численных значений в параметреSTRATEGY для каждого отдельного блока.
0Примечание: эти данные PID-блоком ни проверяются, ни обрабатываются.
TAG_DESCИндекс: 2Обращение: r, wЗначение холод. старта:
Ввод характерного для данного потребителя текста, максимум32 знака, для более точной идентификации и «привязки» блока.
текст отсутствует.TRK_IN_DИндекс: 38Обращение: r, w
Индикация и установка дискретного входа (значения и статуса), которыйактивирует следящее регулирование от внешнего источника или от выходногосигнала. После активирования следящего регулирования режим работыизменяется на LO (локальное следящее регулирование). При этомуправляющий сигнал на выходе OUT принимает значение, установленное навходе TRK_VAL.
TRK_SCALEИндекс: 37Обращение: r, w врежимах MAN, O/SЗначение холод. старта:
Установка диапазона (начального и конечного значений)физической величины и точности после запятой в значениипеременной процесса (PV).
100%TRK_VALИндекс: 39Обращение: r, w
Индикация и ввод значения и статуса сигнала в аналоговойформе, который будет сниматься с какого-либо другогофункционального блока и использоваться в качестве входногодля функции внешнего следящего регулирования.

74 Описание параметров
EB 8383-1 RU
UPDATE_EVTИндекс: 43Обращение: r
Индикация, были ли изменены статические данные, включаядату и время.
7.5 Другие параметры
7.5.1. Stale CounterStale Counter служит для оценки «качества» переменных процесса, получаемых поконфигурируемому циклическому соединению (Publisher-Subscriber-соединение).Посредством таких соединений осуществляется передача переменных процессамежду различными функциональными блоками.С этой целью передающий блок (Publisher) в определенный момент временинаправляет данные переменной процесса на шину. Следующий блок или блоки(Subscriber) в указанные момент времени «слушают» шину. Принимающие блокиконтролируют корректность информации, получаемой в назначенный моментвремени.Информация корректна, если она в назначенный момент времени имеет статус“Good” (хороший).Параметр Stale Counter назначает, сколько должно быть принято следующих друг задругом «плохих» (stale) значений, чтобы в блоке активировался механизм Fault State(состояние ошибки).Если значение Stale Counter установлено на «0», то указанный механизм контроляотключается.
7.5.2 Link ObjekteLink-объекты служат для обеспечения соединений между входами и выходамифункциональных блоков (конфигурируемые циклические соединения).Для каждого позиционера могут быть сконфигурированы 22 Link-объекта.
7.5.3 LAS-функциональностьКоличество проектируемых соединений и планировщиков настраивается навозможности DeltaV-системы от FISHER-ROSEMOUNT.В качестве LAS-функциональности позиционером могут поддерживаться следующиепланировщики множеств:
1 планировщик 1 субспланировщик 25 последовательностей на субпланировщик 25 элементов на одну последовательность

75 Сообщения диагностики
EB 8383-1 RU
8. Сообщения диагностики
8.1 Сообщения в параметре XD_ERROR_EXT (блок обработки – TransducerBlock)
Failure mechanics / неисправность механикиЭто сообщение устанавливается, если при циклической проверке будетвыявлен дефект в модуле механики. Потребуется ремонт.
Failure in measurement / ошибка выполнения измеренийВнутренний АЦП работает некорректно в пределах своего временного «окна»,либо измеряемые значения лежат вне физических границ измерения АЦП.Если при сбросе путем горячего перезапуска проблема не устраняется,потребуется ремонт.
Not initialized / прибор не инициализированПрибор еще не прошел инициализации.
Selfcalibration failed / ошибка самокалибровки (коррекции)Не удалось успешно выполнить инициализацию. Уточненные сведенияотносительно причины сообщаются в параметре SELF_CALIB_STATUS.
Zero point error / ошибка нулевой точкиСообщение об изменении более чем на 5% параметра, определенного в ходеинициализации или коррекции нулевой точки.Возможные источники неисправности:- износ конуса или седла клапана;- инородные частицы в зазоре плунжерной пары.
Сброс осуществляется через успешную инициализацию.
Internal Control Loop disturbed / помеха внутреннего позиционированияСообщение появляется, если позиционер не в состоянии в установленноевремя отслеживания (Delay Time) осуществить регулирование в заданномдиапазоне допуска.Сброс осуществляется через SELF_CALIB_CMD – “Reset Control Loop Fault”.
Travel time exceeded / превышено время срабатыванияБыло превышено рассчитанное в ходе инициализации время срабатывания.

76 Сообщения диагностики
EB 8383-1 RU
Forced venting active / активен принудительный сброс воздухаЗадействован принудительный сброс воздуха, т.е. сигнал на соединительныхклеммах +81 и -82 менее 3 В.Регулирующий клапан независимо от условий регулирования переводится вположение безопасности. Сброс происходит автоматически, при наличиисигнала постоянного напряжения в пределах 6…24 V DC на соединительныхклеммах +81 и –82.
Device under Selftest / полевой прибор в состоянии самотестированияСообщение устанавливается, когда прибор находится в состоянииинициализации или электрической коррекции нулевой точки.
Total valve travel limit exceeded / превышена граница абсолютногопутевого перемещения (путевого интеграла)Текущая величина абсолютного путевого перемещения превышает заданноеграничное значение.Сброс обеспечивается командой “SELF_CALIB_CMD=Reset total valve travel”.
8.2 Сообщения в параметре XD_ERROR (блок обработки – TransducerBlock)
Unspecified Error / непредусмотренная неисправностьПрибор не был инициализирован или превышено абсолютное путевоеперемещение.
General Error / общая неисправностьНе выполнено согласование.
Calibration Error / ошибка калибровкиСообщение устанавливается при ошибке нулевой точки, неисправностиконтура регулирования или, когда возникает ошибка при инициализации.
Calibration Error / ошибка калибровкиОшибка при передаче характеристики на прибор.Сброс осуществляется автоматически после передачи корректнойхарактеристики.
Electronics Failure / неисправность электроникиСообщение устанавливается, когда в ходе циклической проверки выявляетсядефект электронного модуля. Потребуется ремонт.

77 Сообщения диагностики
EB 8383-1 RU
Mechanical Failure / неисправность механикиСообщение устанавливается, когда в ходе циклической проверки выявляетсядефект механического модуля. Потребуется ремонт.
Data Integrity Error / ошибка целостности данныхОшибка контрольной суммы.
Algorithm Error / ошибка вычисленийОшибка вычислений задающего и текущего значений.

78
SAMSON AG • MESS- UND REGELTECHNIKWeismüllerstraße 3 • 60314 Frankfurt am MainPostfach 10 19 01 • 60019 Frankfurt am MainTelefon 069 4009-0 • Telefax 069 4009-1507
EB 8383-1 RU