Embed Size (px)
Citation preview

SIMUI.ADOR ANALOGICO DE CONTROL DE PROCESOS
SANDRA MILDRED MEJIA
MONICA PARRA
lh|rr$ldrd Au{6non¡ dc OallatrsEcctof{ BlELroTEcA
lor cuAo 020603trv, ,
BrBLrorEcA
rillüllülülulu|[il[|ullüilil r0co tLol
CORPORACPN U NIVERSITARIA AUTONOMA DE OCC¡DENTE
DMSION DE INGENIERIAS
PROGRAMA DE INGENIERIA ELECTREA
SANTIAGO DE CALI
t995

SIMULADORANALOGICO DE CONTROL DE PROCESOS
SANDRA MILDRED MEJIA
MONICA PARRA
TrabaJo de grado para optar altftubde Ingeniero Electricieta
DirsctorAPOLIMR GOI,¡ZALEZ
Ingenlero ElectrúnicoUnivcrsidad Autónoma de 0ccidcntc
SECCION BIBLIOTECA
CORPORAGION UNMESITAR]A AUTONOMA DE OCC¡DENTE
DMSION DE INGENIERIAS
PROGRAMA DE INGENIERIA ELECTRICA
SANTIAGO DE CALI
I 995

M +t6¿.0, /
NOTA DE ACEPTACION
Aprobado por el comitÉ dogrado sn cumpHnieúo ds losrequisitos exigirlos por laCorporación thiversitaria A¡tónornade OccHente para optar al tftrdoIngeniero Electrkista.
PRESIDENTE DEL JURADO
69/,3illJ7
\
i\
O,ep € Al,to,,o
JURADO:r
1ir'f{
r\.$r
Cali, Julio do 1995
ut

AGRADECIMIENTOS
Los autoros srpresan Eus agradecimlentos.
A APOLIMR GOiIZALEZ, l.E. Profesor hora cátedra de h Corporación
Uniwrsitaria ArÍónoma de Occidente, Departamento de Ingenierfa Elsctrónica
y Dlrector delTrabalo, por sus tlwluabbs aportes y dedcaclón.
A OSCAR AGREDO, l.E. Director programa lngenlerfa Electrónlca, Aseeor
del Trabajo quo con su gran dlsponibilidad y e¡gsriencia hizo poeible h
reallzaclón del proyecto.
A CESAR ROJAS, l.E. Profesor hora cátedra de la Corporación uniwrsitarla
Autónoma de Occidente, Departamefio del Ingenierfa Ebctrónica, por loa
aportes y apoyo ofrecido sin los cualss no hl$iese sido poehle h realizaclún
de Éste proyecto.
1Y

A FREDY IIARANJO, l.E. Dlrector del Centro de lrre$lgaclones de la
Corporacbn l..hhrcrsltarla Autónoma de Occldente, pof, lm aportes y apoyo
oltecHo sln los cuales no ht¡blese sldo poslble la reallzackán de éste trabap.
A la Corporaclón UnFercfrarla Autónorna de Occldente.
A todas aquellas personas que en una u otra fbnna colaboraron en la
reallzaclón de éste trabalo.

DEDEATOHA
Todo el esll¡era conJugado en éete trabaJo a Dlos, a mls padres y l-lermano.
HECTOR MEJIA
MARIEI.A RAMIREZ DE MEJ¡A
JI.IAN SEBASTIAT.I M EJIA
Con carlño y gran amor a mi compañero.
DIEGO FERI.|ANDO CARDONA
A mis familiares y amigos quienes siempre me brlndaron $u colaboraciún.
YT
SAI.¡DRA MILDRED

DEDICATORIA
Todo el esfiror¿o conJugado en úEte trabaJo a mls padres y hermanos.
WILFREDO PARRA
OLGA LUCIA VAROM DE PARRA
ARMAI.IDO PARRA
LUIS FERMNDO PARRA
A mis famÍliareg y amigos, que de una u dra manera ofrecieron ru apolro
incondicbnal para la cufrninación de Éete proyucto.
Yu
MONICA

TABLA DE CONTENIDO
RESUMEN
INTRODUCCION
1. srffiurAcÉr AtALoctcA
1.1. ELEMENTOS DEL SIMULADOR AMLOGICO
1.1.1. Funciones Lineales
1.1.1.1. Ganancia
1.1.1.2. Sumador
1.1.1.3. Integrador
1,1.1.4. Primer Orden
1.1.1.5. Segundo Orden
1.1.1.6. Adelanto y Atraso
1.1.1.7. lrwersor
1.1.1.8. PtD
1.1.2. Funciones No Lineales
Página
3
7
III
10
11
12
13
14
15
16
ni¡
1
vul

1.1.2.1.
1.1.2.2.
1.1.2.3.
1.1.2.4.
1.1.2.5.
2.
2.1.
2.1.1.
2.1.2.
2.1.3.
2.1.4.
2.1.5.
2.1.6.
2.1.7.
2.1.8.
2.2.
2.2.1.
2.2.2.
2.2.3.
2.2.4.
2.2.5.
Limltador
Zona Muerta
Tiempo Muerto
Histéresis
On-Off
ESTUDIO DE LOS SISTEMAS MEDIATTE EL SITIULADOR
AXALOGICO
FUNCIONES LINEALES
Ganancia
Sumador
Integrador
Prlmer Orden
Segundo Orden
Adelanto-Atraso
Inversor
PID
Funciones No Lineales
Llmltador
Zona Muerta
Tlempo Mueño
Histéresis
OnOff
16
17
19
19
20
22
23
23
26
27
30
u38
40
41
47
47
48
49
50
52
1X

2.3.
2.4.
2.5.
3.
3.1.
3.2.
3.3.
3.3.1.
3.3.2.
3.3.3.
3.4.
4.
4.1.
4.1.1.
4.1.2.
4.2.
4.2.1.
4.2.2.
4.2.3.
4.2.4.
4.2.5.
Fuentes de Voltaje
Generadores de Señales
Clrcuitos Displays
SIMULADOR ATALOGICO DE COXTROL
PROCESOS
OBJETIVOS
CARACTERISTICAS
DISEÑO Y CONSTRUCCION
Panel Frontal del Simulador
Clrculterfa
Construcción Ffsica
FUNCIOI.¡AMIENTO
MAXUAT DE SERVICIO
PRECAUCIONES DE SEGURIDAD
Fuente de Potencia
lnstalación
DESCRIPCION DE LOS CONTROLES
Botón lntemrptor
Fuente de 5 Voltlos
Fuente Dual de 15 Voltios
Generadores de Sefiales
Sumadores
53
55
56
DE
57
57
57
58
58
60
64
64
66
66
66
66
67
87
67
68
69
70

4.2.6.
4.2.6.1.
4.2.6.2.
4.2.6.3.
4.2.7.
4.2.8.
4.2.9.
4.2.10.
4.2.11.
4.2.12.
4.2.13.
4.2.14.
4.2.15.
4.2.16.
4.2.17.
4.2.18.
4.3.
Controlador PID
Proporcional
Integral
Derivativo
Integrador
Ganancia
Segundo Orden
Primer Orden
Retardo
AdelanteAtraso
lrwersor
On-Off
Llmitador
71
71
71
72
72
74
75
76
77
78
79
79
80
5.
5.1.
5.2.
Histéresis 80
Zona Muerta 81
Multiplicador 82
REQUISITOS PARA HACER CONEX¡ONES ADICIOMLES
AL SIMULADOR AMLOGICO
StMULAC|OXES
PRIMER EJEMPLO
SEGUNDO EJEMPLO
82
83
86

BIBLIOGRAFIA
ANEXOS
90
92
xu

FIGURA 1.
FIGURA 2.
FIGURA 3.
FIGURA 4.
FIGURA 5.
FIGURA 6.
FIGURA 7.
FIGURA 8.
F¡GURA 9.
FIGURA 10.
FIGURA 11.
FIGURA 12.
FIGURA 13.
LISTA DE FIGURAS
(a) Amplificador Diferencial de Acoplamiento directo
(b)Representacion Simplilicada del Amplilicador
Diferencial
Gircuito Ganancia
Circuito Sumador
Circuito Integrador
Circuito Primer Orden
Circuito Segundo Orden
Circuito Adelanto y Atraso
Circuito lnversor
Circuito PID
Circuito Limitador
Señal de Salida del Circuito Limitador
Circuito Zona Muerta
Señal de Salida del Circuito Zona Muerta
Página
7
II
10
t1
12
13
14
15
17
17
18
18
xlll

FIGURA 14.
FIGURA 15.
FIGURA 16.
FIGURA 17.
FIGURA 18.
FIGURA I g.
FIGUR,A 20.
FIGURA 21.
FIGURA 22.
FIGURA 23.
FIGURA 24.
FIGURA 25.
FIGURA 26.
FIGURA 27.
FIGURA 28.
FIGURA 29.
FIGURA 30.
FIGURA 31.
FIGURA 32.
FIGURA 33.
FIGURA 34.
FIGURA 35.
Circuito Tiempo Muerto
Circuito Histéresis
Señal de Sallda del Girculto Hlstéresls
Circuito On-Ofi
Señal de Sallda del Circulto On-Olf
Circuito Ganancia
Clrculto Sumador
Circuito Integrador
Clrculto Prlmer Orden
Respuesta C(t)
Circuito de Segundo Orden
Circuito de AdelantoAtraso
Clrculto lrwersor
Circuito del PID
Método de Ziegler-Nlchols
Entrada Escalón
Curva de Reacclón
Circuito Limitador
Circulto de Zona Muerta
Circuito de Tlempo Muerto
Circulto Histerésls
Circuito Si-No
19
19
20
20
21
24
26
27
31
32
36
39
41
42
43
44
44
47
49
50
51
52

FIGURA 36.
FIGURA 37.
FIGURA 38.
FIGURA 39.
FIGURA 40.
FIGURA 41.
FIGURA 42.
FIGURA 43.
FIGURA 44.
FIGURA 45.
FIGURA 46.
F¡GURA 47.
FIGURA 48.
FIGURA 49 .
FIGURA 50.
FIGURA 51.
FIGURA 52.
FIGURA 53.
FIGURA 54.
FIGURA 55.
Prlmeras Fuentes de Voltaje
Fuente de Voltaje para Displays
Panel del Slmulador Analóglco de Control
de Procesos
Carcaza del Slmulador Analóglco de Control
de Procesos y sus dimensiones
Dlstribuclón de los Circultos en el Doble Fondo
Botón Intemrptor
Fuente de 5 Votlos
Fuente Dual de 15 Voltios
Generadores de Sefiales
Sumadores
Controlador PID
Integrador
Ganancla
Segundo Orden
Prlmer Orden
Retardo
AdelantoAtraso
lflversor
Opoff
Limitador
u55
6t
62
65
87
68
68
69
70
73
74
75
76
76
77
78
7g
80
80

FIGURA 56.
FIGURA 57.
FIGURA 58.
FIGURA 59.
FIGURA 60.
FIGURA 61.
FIGURA 62.
Histéresls
Zona Muerta
Lazo de Control del Primer EJemplo
Respuesta del Primer Ejemplo
Lazo de Control del Segundo EJemplo
Salida de una Función del Primer Orden
Respuesta del Segundo Ejemplo
81
8f
u85
86
88
89

LISTA DE ANEXOS
Página
AiIEXO A Circuitos de los Generadores de Señales gs
AI¡EXO B Circuito de Displays gB
¡nlii

RESUMEN
Esta tesis es el resumen de la experiencia adquirida por los autores en el
diseño y uso del Simulador Analógico de Control de Procesos y a la gran
asesoria dada por los docentes del programa de Ingenierla Electrónica de la
Corporación Universitaria Autónoma de Occidente.
La finalidad es elponer de una forma sencilla y experimental las simulaciones
de los diferentes procesos de control y el uso adecuado de los diferentes
elementos que conforman el $imulador furalógico de Control de Procesos.
Además se busca dotar a la Universidad de un módulo para la realizaciün de
laboratorios de Simulación de Control de Procesos . También se proporcionan
guias para dichos laboratorios.
Actualmente, el uso de los sistemas automáticos está en plena elpansión ya
que brindan medios para lograr el funcionamierilo óptimo de
xviii

slstemas dlnámlcos, mejoran la calldad, abaratan los costos de producclón,
expanden el ritmo de producción, liberan de la complejidad de muchas rutinas
de las tareas manuales respectivas, etc., la mayoria de los ingenieros y
cientfficos deben de tener buenos conocimientos en este campo.
Los aúores pretenden llenar este vacio, en beneficio de este campo de la
formación profesional.
xlx W

INTRODUCCION
El presente trabajo es un resumen práctico de irwestlgación en la simulación
de procesos automáticos de control.
El objetivo es exponer de una manera clara y didáctlca la eJecución y anállsls
de circuitos de control.
La forma de aprender se basa
presentan. El alumno conectará
poder práctlear los circuitos que se
circuitos a trabajar con un cableado
en
los
sencillo y analizará su respuesta por medio de la conexión adicional de un
osciloscopio, en el cual se permite apreciar su respuesta presentada ante
estimulos de prueba (como señales senosoidales, triangulares, rectangulares,
pulsos y diente de siena). Además el alumno no solo estará en capacidad de
efectuar las prácticas propuestas sino que podrá efectuar rariaciones, ya que
el simulador está dotado de un gran archivo de funciones de transferencia
lineales y no lineales que hacen posibles diversas simulaciones de sistemas de
control.

Los circuitos que conforman el simulador seran estudiados de una manera
clara y concreta que le permita al alumno arranzar en la simulación de
procesos de Control.

1. SIMULACION ANALOGICA
Cuando dos sistemas ffsicos obedecen a ecuaciones idénticas en forma, se
llaman análogos. Un sistema análogo puede ser utilizado como modelo para
otro y la solución de uno será también la solución del otro.
En ingenierfa el estudio de los sistemas análogos se hace con aytda de
sistemas eléctricos por las siguientes razones:
-Los parámetros eléctricos se pueden variar con facilidad, dentro de amplios
limites.
-Se puede registrar fácilmente las variables (a travós de osciloscopios,
registradores, etc.)
-Los parámetros eléctricos se pueden medir con gran precisión, además es
fácily de bajo costo el efectuar operaciones con ellos (uoltajes, conientes)
-Son pequeños los tamaños de los dispositivos que conforman el moclelo.
-Los dispositiws son de bajo costo y es fácil el trabajar con ellos.

4
-Las escalas de simulación se pueden variar para facilltar la observación
(amplitud, tiempo ).
En la simulación de sistemas análogos se emplea el computador, el cual está
en capacidad de:
-Resolver las ecuaciones del sistema y modelarlo.
-Presentar el funcionamiento del sistema.
-Comprobar varlos disef,os de un slstema (sin construlrlo realmente),
optimizar el diseño.
En general se pueden simular condiciones reales a escala del sistema que se
modela.
La slmulaclón de sistemas aúomáticos de control usualmente es hecha en
computadores. Su gran fleibilidad permite que esta máquina resueln
vlrtualmente cualquler problema dlnámlco sln lmportar su tamafio o velocldad.
La slmulaclón a través de computadores dlgitales es f?ecuente en slstemas
grandes, donde se involucran muchas varlables e Interacclones, y en especlal,
cuando se busca optimización de modelos. Es especialmente útil en el
tratamiento de sistemas no lineales.

La simulación analógica se emplea más ltecuentemente en slstemas
pequeños donde se irwolucran pocas varlables e interacclones y en especial ,
cuando se desea efectuar el análisis de comportamlento y de respuesta de un
sistema.
En la simulación analógica las variables están representadas por voltajes, ya
sean las sefiales de entrada o las señales de salida.
En este proyec'to báslcamente, se slmuló el comportamlento de sistemas
reales ante estlmulos de prueba.
El Simulador Analógico está constituido básicamente por:
-Generadores de Señales (Senosoidal, triangular, cuadrada, impulsos y diente
de slena ).
-Ampliflcadores operacionales.
-Fuente de alimentaclón de C.D. varlable (para simulaclón de condiclones
iniciales)
-lntemtptores para controlar las funclones a utilizar y sus rangos de trabaJo.
- Potenciómetros para introducir constantes ajustables.
-Varios valores de reslstencia y condensadores.

-Elementos de indicaclón y registro (Osciloscopio y Displays).
La unidad báslca del Slmulador Analóglco es el ampltficador diferenclal de
acopfamiento directo, en la figura 1. se muestra sus representación
slmpllflcada.
Un ampllllcador dlferenclal, para que pueda utlllzarse en el slmulador analóglco
debe tener las sigulentes carac'terfsticas (ideales):
-lmpedancia de entrada infinita.
-lmpedancia de salida cero.
-Ganancia y ancho de banda irfinitos.
-VoltaJe de sallda cero para sefral de entrada cero.
Se caracterlza tamblén por tener baJo nlvel de ruldo, establlldad térmlca y
llnealldad. El ampliftcador operacional es el clrculto Integrado más impoÉante
en la slmulaclón de operaclones arltmétlcas y en el dlseño de aplicaclones de
regulación y control dentro del mundo analóglco.
Como una henamlenta de demostraclón en clases, la slmulaclón en las
computadoras no es tan real como lo será por medlo del Slmulador Analóglco
de Control de procesos.

Entradadirccta
+V
o
(b)(a)
d "?f$15-""'----1/ "1_4_
Entradainvertida
FIGURA l. (a) Ampmcador dlferenclal de acoplamlento dlrecto.
(b) Representaclón slmpllflcada del ampllflcador dlferenclal.
1.I ELEMEXTOS DEL SIMULADOR ATALOGICO
Slendo el elemento báslco del slmulador, el ampllflcador diferenclal, esta
unidad básica, mediante el empleo de la real¡mentac¡ón , se cofwierte en un
dlsposltlvo que está en capacldad de reallzar varlas operaclones matemátlcas,
y slmulaclones de funciones de control.

8
1.1.1 Funcloner Llnedes
1.',.1.1 Ganancla
Flgura 2. Clrculto Ganancla
Aplicando la Lay de ohm y despejando Vo, obtenemos la ecuación del
siguiente circuito:
vo =(__R/'l.l_ jl).n
,\ .Ral \ R2l
S¡ R3 = R2, su función de transferencia será:
I/o(S)= Kl*I/t(,S)

I
Donde :
1.1.1.2 Sumador
Aplicando la Ley de Ohm y despejando Vo, obtenemos la fi¡ncion
transferencia del siguiente circuito:
n=!Ra
4 (s) = (nUn - fi * v,(s)* #- n,Ur#- n,n fr -r,u,#)
Universid,"d Artón0in¡ de r.cciCentc
stcclrJh" Bil!0ii;A
Flgura 3. Glrculto Sumador

10
l.l.l.3 Integrador
Flgura 4. Clrculto Intcgrador
Aplicando la Ley de ohm y despejando Vo, obtenemos la ecuación del
siguiente circuito:
Su funcion de transferencia será:
,,=(-&i[vra).(-#)
vo(s)= ("r4)nqrt

11
Donde:
K=lil) v *=(J-\\R2l \ Rl* Cf )
1.1.1.4 Prlmer Orden
Aplicando la Ley de ohm y despejando vo, obtenemos la ecuación del
siguiente circuito:
{10 kn
Rl- 1A ld!
Flgura 5. Clrculto Pdmer Orden
Su funcion de transferencia es:

12
rzo(s)= ffin4t¡
xt= E.,Rl '
K2=S yT=Rf*CfR2
1.1.1.5 Segundo Orden
VI
lfa
Flgura 8. Clrculto Segundo Orden

13
Su funcion de transferencia es:
vo(s)=(-#*) 'üz(s)
l.l.l.C Adelanto y Atraso
Flgura 7. Clrculto Adelanto y Atraso
Apllcando la Ley de Ohm y despejando Vo, obtenemos la ecuación
anterior circuito:
Gal{F
CaZ{F
vo = ( -Rl) *[ (nt* c")" * t-l -l- ¡1)\ RU L(R/*cf)s+l1 \ RA

14
Su funclon de transferencia:
rzo(s)= f.o-Í:-Jtf .tll\ (rzs+ t) )
Donde:
"t= l4l)\ Rll
"r = lil)\ R2l
1.1.1.7 lnversor
Flgura 8. Clrculto Inversor

15
Aplicando la Ley de Ohm
transferencia:
1.1.1.8 PrD
y despelando Vo, obtenemos la funcion de
rzo(s)= -#*,r{s)
Écfr'tl-cFz{F
R4
Rtaq{
{Gi{
tdl:5Irll
Flgura 0. Glrculto PID

16
Funcion de Transferencla:
Donde:
ro(s) = ( tr-r*Kz )+("t. ?) .(+#),
vo(s\= Kl + wl + Tls
\ ' ,s 72S+l
Kl= ERI
K2= ER2
K3={R4
14=jgR7
IUI= |R6* Cf
Tl= R9* Ca
T2= RlO* Ca
1.1.2 Funclones to Llneales
1.1.2.1 Llmltador

17
Flgura 10. Clrculto Llmltador
Flgura 11. Señal de sallda del Clrculto Llmltador
1.1.2.2 Zona Muerta

18
Flgura 12. Clrculto Zona muerta
Flgura 13. Señd de sallda del Clrculto Zona muerta

19
1.1.2.3 Tlempo MueÉo
1.1.2.4lllsteresls
Flgura 14. Clrculto Tlempo mueÉo
Flgura 16. Glrculto Hl¡tcroelc

20
1.1.2.6 On{ff
Flgura 18. Señal de Sallda del Clrculto Hlstóresls
Flgura 17. Glrculto On€ff

2',1
Flgura 18. Scñal dc Sallda dcl Clrculro On€ff

2. ESTUDIO DE LOS SISTEMAS MEDLANTE EL SIMULADOR
ANALOGICO
El empleo común de un computador analógico ss para resolver ecuaciones
diferenciales. Se entiende entonces como este tipo de computador puede ser
ventajosamente utilizado para el estudio de los sistemas lineales y no lineales,
ya que la dinámica de muchas plantas y aparatos se rige por relaciones
matemáticas de carácter diferencial.
El Simulador Analógico de Control de Procesos consta de los más
importantes circuitos de simulación, con los cuales se puede lograr encontrar
la respuesta de los sistemas en función de la variable de tiempo y también las
curvas caracterfsticas en función de la frecuencia.
Con el simulador analógico se logra rariar las respuestas de los diferentes
circuitos del sistema lográndose efectuar una verificación cabal de la
estructura de una planta o utilizar los clatos para desanollar un proyecto de

23
la misma que satisfaga determinados requisltos para su funclonamlento
dinámico.
Los circuitos utilizados para lograr las respuestas necesarias en las
aplicaclones elpuestas fueron diseñados dependiendo prlncipalmente de la
fecuencia . La fecuencia varfa en un rango visible en el Osciloscopio, entre
fos 30 lü y 10 Klu permitlendo asf escoger los diferentes valores de
resistencias, condensadores, potenciómetros, etc., necesarios para la
lmplementación de los clrcultos que constftuyen el Slmulador Análogo.
Cada clrcuito fue slmulado en el Worlbench, luego de varlas slmulaciones con
diferentes valores de elementos (resistencias, condensadores y
potenclómetros) y condiciones (ltecuencla, nlveles de tenslón, ancho de
banda, etc.); se eligieron los mlores con los cuales se twieron los siguientes
rangos de simulación.
2.1. FUXC|OilES L|ilEALES
2.1.1. Ganancla
El simulador analógico consta de 5 circuitos de ganancias los cuales fueron
diseñados de la sigulente manera:

24
Para la selecclón de reslstencias y potenciómetros se reallzaron slmulaclones
prácticas que permitieron ver la salida en el rango de frecuencia estlmado (30
Flz a10 KFlz) .
Flgura 18. Clrculto Ganancla
Rlawl*t Rrb
En prlmer lugar se
caracterfstlcas. Los
siguientes:
escogieron 3 clrcultos de ganancias con las mlsmas
valores de reslstenclas y potenclómetros son los

25
Rla: 1 Kohmlo
Rlb : 10 Kohmio
Rr : Potenciómetro de 100 Kohmio
Ra : 10 Kohmio
Rz = Rs : 10 Kohmios
Rb : 5 Kohmios
Con Rla : 1 Kohmlo se presentó un rango de ganancia igual a:
Gmin : 0 Gmax: 100
Con R1b : 10 Kohmlo se presentó un rango de ganancia igual a:
Gmin : o Gmax: 10
Tamblén se escogló 2 clrcultos de ganancia con las mlsmas caracterfstlcas.
Los valores de resistencias y potenclómetros son los siguientes:
Ria: 1 Kohmio
Rlb : 10 Kohmio
Rr: Potenciómetro de 10 Kohmio
Ra : 10 Kohmio
Con Rla : I Kohmlo se presentóó un rango de ganancla lgual a:
Gmin : o Gmax: 10
Con Rib : 10 Kohmlo se presentó un rango de ganancia igual a:
Gmin:0 Gmax:l
A cada uno de los circuitos se le complementa con un circulto lruercor con
ganancia unitaria:

26
2.1.2 Sumador
El simulador analógico consta de 5 circuitos sumadores los cuales se
disefiaron de la siguiente manera:
Tiene dos entradas positlvas y tres entradas negatlvas, facllltando asf la
realización de las operaciones de suma y resta según corwenga.
Todas sus resistencias son iguales, por esta razón cada entrada tlene una
ganancia de voltaje unitaria.
Figura 20. Clrculto Sumador
La salida es igual a la suma deVr +Vz, ya la resta de-V3-Vt-Vs,

27
esta irwertida, por eso el clrculto va complementado con un clrcuito lrwersor,
también con ganancia unitaria.
2.1.3Integrador
Flgura 21. Clrculto Integrador
El simulador analógico consta de 3 circultos Integradores los cuales se
diseñaron de la siguiente manera:

28
Para la selecclón de condensadores y resistenclas se debló slmular
prácticamente los circuitos teniéndose en cuenta que fueran vislbles en el
osciloscopio dentro del rango designado ( 30 Hz a 10 Ktz) y obtenléndose su
sallda con una entrada unitaria se pudo determinar su constante de tiempo T
(R r c).
PRIMER CIRCUITO:
Rr : I Kohmio
Cr : 0.01 micro Faradios
Q: 0.1 micro faradios
Rz : Potenclómetro de 10 Kohmios
Rg = & : 10 Kohmios
R' = 5 Kohmios
Con Cr : 0.01 micro faradios.
Tmin : 0.01 mseg Tmax : o.11 mseg
Con Cz : 0.1 micro Faradios
Tmln : 0.1 mseg Tmax: I mseg
SEGUNDO CIRCUITO:
Rl :100 ohmios
R2 : Potenciómetro de 10 Kohmlos
Cr : 0.1 micro Faradios

29
Cz:- 1 m¡cro faradlos
Rz : Potenciómetro de l0 Kohmios
R¡=&:l0Kohmios
Ra : 5 Kohmios
Con Cr : 0.1 micro faradios
Tmin : 0.01 mseg Tmax : 1.01 mseg
Con Cz : 1 micro faradlos
Tmin : 0.1 mseg Tmax: 10.1 mseg
TERCER CIRCUITO:
Rr : 0 ohmios
Rz : Potenciómetro de 10 Kohmios
Ro = Rr : 10 Kohmios
R, : 5 Kohmios
Cr : 0.1 micro faradios
h: 1 micro faradios
Rt : Potenclómetro de 10 Kohmios
Con Cr : 0.1 micro faradios
Tmln : 0 mseg
Con Cz : I micro faradios
Tmax : 1 mseg
Tmln : 0 mseg Tmar: 10 mseg

30
Todos los clrcultos van complementados con un clrculto lrwercor de ganancla
unitaria.
2.1.4 Prlmer Orden
El simulador analógico consta de 3 circuitos de primer orden los cuales se
diseñaron de la sigulente manera:
Como se üo en el capitulo anterior la relación de entrada-salida esta dada
por:
lct"l)_l I )[x("t -(r"+,
Donde T es la constante de tiempo del sistema (R'C).
Se analizaron los circuitos con condiciones iniciales iguales a cero, y una
entrada tipo escalón unitarlo (La transformada de Laplace de la tunción
escafón unitario es igual " (t/rl). Por lo tanto se obtiene lo siguiente:
c(s)= 11.- L )\s Ts+l)
Desanollando C(s) en facciones parciales da:
c(s)=(i #JTomando la transformada iruersa de Laplace se obtiene:
C(t¡ = t- e-'r(t > O)

3t
Flgura 22. Clrculto Prlmer Orden
Esta ecuación establece inicialmente que la salida C(t) es cero y finalmente se
corMerte en la unldad. Una de las caracterlstlcas lmportantes de una curua de
respuesta exponencial como esta C(t), es que en t=T el valor de C(t) es
0.632, o sea que la respuesta C(t) ha alcanzado el 63.2% de su variaclón
total. Se puede ver esto fácllmente sustituyendo t=T en C(t). Es decir:
C(f) = !- e-t = 0.632

32
Cuanto mas pequefia es la constante de tlempo, mas ráplda es la respuesta
del sistema.
e (¿t
{t -€9.G
Flgura 23. Reepuela C(t)
Para la selección de condensadores y resistencias se debió simular
prácticamente los circuitos teniéndose en cuenta que fueran visibles en el
osciloscopios dentro del rango designado (30 l-lz a 10 Ktu) y obteniéndose su
sallda con una entrada unltarla se pudo determlnar T.
PRIMER CIRCUITO
Rr=Rg:lKohmio
Rz = & : Potenciómetros de 10 Kohmios
Rs = Ro . 10 Kohmios

33
Ra = 5 Kohmios
Cr : 0.01 micro faradios
Cz : 0.1 m¡cro faradios
Con Q . 0.01 micro faradios
Tmin : 0.01 mseg
Con C2 : 0.1 micro faradios
Tmar : 0.11 mseg
Tmin : 0.1 mseg Tmax : I mseg
SEGUNDO CIRCUITO:
Rr = Rs . 100 ohmios
Rz = fu : Potenciómetros de l0 Kohmios
Rs=&:l0Kohmios
Ra = 5 Kohmios
Cr : 0.1 micro ltaradios
Ct.lmicrofaradios
Con Cr : 0.1 mlcro faradios
Tmin: 0.01 mseg
Con Cz : I mlcro faradios
Tmax : 1.01 mseg
Tmin : 0.1 mseg Tmax: 10.1 mseg
TERCER CIRCUITO:

34
Rr=Rs:0ohmlos
Rz = & : Potenciómetros de 10 Kohmios
Rs=&:l0Kohmios
Ra = 5 Kohmios
Cr : 0.1 micro faradios
Cz: 1 m¡cro faradios
Con Cr : 0.1 micro faradios
Tmin:0mseg Tmax:lmseg
Con C2 : 1 micro faradlos
Tmin : 0 mseg Tmax: 10 mseg
Todos los circuitos \an complementados con un circuito irwersor con ganancia
unltaria.
2.1.5. Segundo Orden
El simulador analóglco consta de 2 funciones de segundo orden, las
cualesfueron dlseñadas de la slgulente manera:
Para el dlseño de estos circultos se inicló de su función de transferencla de
fazo cenado "(%<¡ dada por:

35
C(s) ar¿z
r(") = ilf۟tfffi
El primer paso al establecer un diagrama de computadora es suponer que se
dispone de la derivada de orden mas elevada.
Se puede obtener X'integrando X" y se puede obtener X integrando X', de la
siguiente manera:
S" = -Z€ot,,s-o,2s + arrze
S= Xr
S,= X,t= X¿
Stt= Xttr = X'z
x't= x¿
tl.^ 2 - -z#r-orxt+opQtl
En la ñgura 24 se muestra un diagrama de calculo para resolyer este slstema.
En éste diseño los mlores de reslstencias son tfpicos donde sus ganancias en
lazo cenado son iguales a la unidad. Los mlores de condensadores son
iguales en vista de que Cr = Cz donde en el prlmer clrcuito son 0.001 mlcro
faradios y en el segundo circuito es de 0.01 micro faradlos, ar, y € son
potenc¡ómetros de 10 Kohmios.

Wva
+t'=
-n¡J.tf r¡f'ryAa rc
Flgura 24. Clrculto de Segundo Orden
36
--t-J---rt€ Hl
-.É-J

37
En ef panel de control á (su constante de amortiguamiento) varia de O a 2
lográndose apreciar sus variaciones de amortiguamiento las cuales son:
€=o
€=l
F-'''a- L
€< 1
No amortiguado
Crfticamente amortiguado
Sobreamortiguado
Amortiguado
Para la obtención de los valores de @t, se procedió a hacer varias
slmulaclones prácticas en las cuales la constante de amoftlguamlento two un
valor fijo de 0.5 con el fin de apreciar su amortiguamiento y asf poder medir el
valor T ( constante de tiempo) el cual se mlde entre los dos plcos de las señal
de salida de este circuito con el objetivo de reemplazar este valor en la
sfgulente ecuaelón quedando como únlca Incógnlta 04.
El potenciómetro de ar, toma valores de I Kohmio, 2 Kohmios, 3 Kohmios y
asl suceslvamente hasta 10 Kohmlos efectuándose a la vez en cada uno de
estos valores variaciones en la fecuencia obteniéndose el mismo valor de
T(constante de tlempo).

38
Para el prlmer clrculto con C1 = Cz:0.001 mlcro faradlos el valor de a4 varla
en el siguiente rango:
0 a 10000
Para el segundo circulto con Cr = Cz I 0.01 mlcro faradlos el valor de o)l
mria en el siguiente rango:
0 a 100000
2.1.6. Adelanto - Atraro
El slmulador analóglco consta de 2 circultos de adelanto - atraso los cuales se
diseñaron de la siguiente manera:
Para la selección de condensadores y potenciómetros se debió simular
prácticamente los circuitos teniéndose en cuenta que fueran v,lslbles en el
osciloscopio dentro del rango designado (30 Hz a 10 Ktz) y obtenléndose su
salida con una entrada unitaria se pudo determinar los T (R*C).
En estos circuitos se eligen 2 valores de constantes de tiempo afec'tadas por
los mlsmos lalores de condensadores asf :
PRIMER CIRCUITO:
Rr = Rz = R3 = & : Potenciómetros de 10 Kohmios
Ra=R¡:5Kohmlos

39
Cr : 0.01 mlcro faradlos
h:0.1 micro faradios
Con Cr : 0.01 micro faradios
Con Cz : 0.1 micro faradios
Trmin:0mseg
Tzmin:0mseg
Tlmin:0mseg
T2min:0mseg
Tr max: 0.1 mseg
T2 max: 0.1 mseg
Tr rllol: f mseg
TzmÍü:lmseg
G1
{}ca{t
Flgura 25. Clrculto de Adelanto - Atraso
cl{}cz{t-

¡10
SEGUNDO CIRCUITO:
Rr = Rz = R3 = Rr : Potenc¡ometros de 10 Kohmios
Ra=R¡:SKohmlos
Cr : 0.1 micro faradios
C2: 1 micro faradios
Con Cr : 0.1 micro faradios
Tr min : 0 mseg T1 riráX: I mseg
T2 min : 0 mseg T2 max: 1 mseg
Con Cz : 1 micro faradios
Tt mln : 0 mseg T1 rnáx: 10 mseg
Tz min : 0 mseg T2 m?x: 10 mseg
2.1.7.Inversor
El simulador analogico consta de 2 circuitos irwersores con ganancia unitaria,
los cuales fueron deseñados de la slgulente manera.La ganancla esta dada
/ p¡ z\por fa relación \*/rr) y el valor de R' está dada por el paratelo de Rr y Rr .
Rr : 10 Klloohmios
Rr : 10 Kiloohmlos
R. : 5 Kiloohmios

41
Flgura 28. Clrculto InYcrsor
2.1.8.P.¡.D.
El simulador analógico tiene un circuito que consta de la combinación de los
efectos de la acción proporcional, acción de control derivatin y la acción de
control integral, ctryo nombre es acción de control proporcional y derintivo e
integral. Esta acción combinada tiene las ventajas de cada una de las tres
acciones de control individuales. La ecuación de un control con esta acción de
control combinada esta dada por:
m(tt = Koe(t) + K,ro ry . \ ¡a,V,
o la función de transferencia es:
FtP
#=",(t*as*r)

42
donde l$ representa la sensibilldad proporcional, T6 eltiempo derivativo y Ti el
tiempo integral.
Flgura 27. Clrculto del P.l.D.
A una entrada van conectados tres clrcultos (ganancla, Integrador y derlmdor)
los cuales sus salidas se suman por la presencla de un clrcuilo sumador que a
su vez va complementado por un clrculto hwersor de ganancla unltarla. La
ventaja de este clrcuito es que cada uno de los controles van asociados a una
llave selectora que le permite el funcionamlento o no según lo dlsponga el
+srs l16rtdl

48
usuario permitiendo asl una variac¡ón en controles que deseen si es
proporcional, integral, derimtivo, proporcional integral, proporcional derivativu
o proporcionaly derivativo e integral.
Los valores de resistencias son tipicos donde sus ganancias en lazo cenado
son iguales a la unidad. Los potenciómetros son de 10 Kiloohmios para
efec'tuar las variaciones en los valores de cada uno de los controles. Las
resistencias en el control proporcional y los condensadores en los controles
Integral y derivativo se escogleron con base al método empfrlco de Zlegler-
Nichols (curva de reacción) que nos permite determinar cada uno de los
valores de l$ , T¡ V To .
nta
Ffgura 28. Mctodo do Zlcglor-lllchols
Este método se realiza con el sistema en lazo abierto, siendo su
procedimiento el siguiente:
El objetivo de este método es wr como actua el plD sobre una planta en
donde en este caso de una función de segundo orden.
Los pasos a seguir son los siguientes:
ufmF¡

4
a. Apllcar una entrada tipo escalón de magnitud M a la planta.
Flgura 29. Entrada Escalón
b. Registrar graficamente la salida y medir los parametros indicados.
L
Flgura 30. Curva de reacclón
c. Ajustar los parámetros segün las slguientes relaclones:
G=1.2M.NL
4II
I
M

¿15
Ti=2L
Tc = 0.51
Los datos que se obtwieron con los circuitos de la práctlca son
apróximadamente:
M=6.4
N = 1.5
L=0.5
Con los cuales se reemplaza en las anteriores ecuaciones y se obtiene los
slguientes resultados:
Kp = 6'4
Ti =1
T¿ = 0.25
Es'tas cantidades dan una idea de como varfa una cantldad con respecto a la
otra y con esto se puede apreciar un rango de varlaclón:
Para la acción proporcional se escogieron los slguientes valores de
resistencia:
Rra : 1 Kiloohmio y Rru: 10 Kiloohmio
Entonces con la presencla del potenclometro de 100 Kiloohmios se obtienen
los siguientes rangos de ganancias:

4E
ConRra:lKlloohmio
Ko min . 0 Ko max: 100
Con Rr¡ : 10 Kiloohmio
l$ min : 0 l$ max: 10
Para la accion integral se escogieron los siguientes nalores de
condensadores:
G : 0.1 microfaradios y Ca: 1 microfaradlos
Entonces con el potenciómetro de 10 Kohmlos se obtlenen los slguientes
rangos de constantes de tiempo:
Con Cn : 0.1 microfaradios
Tmin:0mseg Tmax:1mseg
ConCa:lmlcrofaradios
Tmln : 0 mseg Tmar: 10 mseg
Para la acción derivativa se escogieron los siguientes valores de
condensadores:
Car : 0.01 microtaradios y Caz : 0.1 microfaradios
Entonces con el potenciómetro de 10 Kiloohmios se obtlenen los slguientes
rangos de constantes de tiempo:

2.2. FUXC|OilES XO LTXEALES
2.2.1. Llmltador
Con Cur : 0.01 microfaradios
Tmin : 0 mseg
Con Cuz : 0.1 microfaradios
Tmax: 0.1 mseg
Tmin:0mseg Tmax:lmseg
47
Flgura 31. Clrculto Llmltador
El simulador analóglco consta de un circuito no llneal
disefiado de la siguiente manera:
llmltador el cual tue

48
Los dlodos zener hacen que el clrculto activo recorte la señal de entrada en
los dos semiciclos. Arriba del voltaje Zener, el circuito tiene una ganancia
unitaria.
La señal de salida se irwieñe por medio de un circuito Inversor con ganancia
lp\unitaria l=l , donde Rs= R¡:10 Kohmiosy Rresel paralelo de Rey Rt,
\Rol '
siendo ésta de 5 Kohmios.
2.2.2. Zona Muerta
El simulador analógico consta de un circuito no lineal de zona muerta el cual
fue diseñado de la siguiente manera:
Como en todos los casos se busca también que la ganancia sea unitarla por lo
lp \tanto l+l es Qual a la unldad donde Rr = Rz : 10 Kohmlos y R. es el
\r(r/
paralelo de Rr y R2 siendo este igual a 5 Kohmlos.
El circuito de zona muerta está alimentado a un voltaJe corwenlentemente
regulado +Vcc y -Vcc que van conectados a potenciómetros de 5 Kohmlos los
cuales permiten una amplia variaclón de la salida del circuito. Consta
primordialmente de dos diodos los cuales conducen para todos los valores
positivos y negativos de la entrada del circuito.

49
La salida de este circufto va asociada a un circuito irwersbr de ganancia
/o \unitaria l+l , donde Re = Rl:10 Kohmiosy R¡ es el paralelo de R3y fu\&/
siendo este igual a 5 Kohmios.
Flgura 32. Clrculto de Zona Muerta
2.2.3. Tlempo Muerto
Ef sfmulador analóglco consta de 2 clrcultos de retardo los cuales fueron
disefiados de la siguiente manera:

50
Flgura 33. Clrculto de Tlempo Muerto
Se efectuaron varlaclones prácticas para lograr determlnar los valores
ideales de condensadores y potenciómetros viéndose asf que el circuito
retardo cle transpofte presenta un comportamlento de fase no mlnlma y tlene
un retardo de fase excesivo sin atenuacion en altas fecuencias. En este caso
T es el tlempo mueÉo. La sallda de este clrculto va conec'tada a un clrculto
irwersor con ganancia unitaria.
2.2.4. Hlstéresls

5t
Flgura 34. Clrculto Hlstórcsl¡
El simulador analógico consta de un circuito no lineal de histéresis el cual fue
diseñado de la siguiente forma.
En el diseflo se escogió un voltaje de entrada igual a 1 voltio y un
potenciómetro de 10 Kohmios (Rz ); entonces estos r¡alores se aplican a la
siguiente ecuacion propia de este circuito:
Vut = & [Vsat)R,+Rr\ /
Reemplazando en la ecuacion se obtiene:

52
O.Svo/tios - lLKiloohmios rvortio\
llKiloohmios+ X. \ ''
De aqul se obtiene elvalor de R1 siendo este igual a 10 Kiloohmios.
2.2.5. On-off
El simulador analógico posee un circuito no lineal oroff el cual fue diseñado
de la sigulente manera:
Flgura 36. Clrculto On€ff

53
En el circuito On-Off sólo se alimento el amplificador con una entrada de 5
voltios a la entrada inversora y la entrada no inversora se conecto a tiena.
La salida de este va asociada a un circuito inversor con ganancia unitaria
/ pr\| + l, donde Rf = Rr : 10 Kohmios y R, es el paralelo de Rf y R1 siendo este\,et / '
igual a 5 Kohmios.
Además de los circuitos antes especiñcados el simulador analóglco también
posee fuentes de voltaje, generadores de señales y circuitos displays.
2.3. FUEXTES DE VOLTAIE
El slmulador analógico consta de 2 fuentes de voltaJe que tueron dlseñadas
con el propósito de alimentar a todos los circuitos del simulador siendo éstas
de +15 voltios, -15 voltios, +5 voltios, -5 voltios y +1 voltio la cual es para
permitir la lectura en los displays; también se proporciona al usuario la
utillzación de una fuente de +15 voltios, -15 voltios y +5 voltios regulables, sin
que afecte en nada la funcionalidad del simulador (Figura 36).
Los displays tienen su propla fuente de potencia que le proporciona un voltaJe
de 5 voltios para su alimentación (Figura 37).

u
+t 5v
+1V
+5V
0a5V
Flgura 30. Prlmeras Fuentes de Voltafe

55
11SVac
Flgura 37 . Fuente de Voltafe pera Dlspla¡n
2.4 GETERADORES DE SEXALES
El simulador analógico consta de 2 circuitos de generadores los cuales se
disefiaron para generar señales cuadradas, triangulares, senosoidales, diente
de sierra y pulsos. En el anexo A, se presenta las especfficaclones del clrculto
integrado utilizado y el circuito del generador.

56
2.5. CIRCUITOS DE DISPLAYS
Ef simulador analógico consta de 4 circuitos displays los cuales fueron
diseñados para obtener la lectura de los valores de ganancla o constantes de
tiempo de los circuitos del simulador. Ver anexo B.

3. S¡MULADOR ANALOGICO DE CONTROL DE PROCESOS
3.1 o&JETIVOS
Disefrado con dos objetivos: bajo costo y uso en clases. El Simulador
futalógico de Control de Procesos cr¡yo panel se presenta en la Figura 38 es
una solución para los problemas de simulación.
3.2 CARACTERISTICAS
1. Dotado de un gran archivo de funciones de transferencia lineales y no
lineales que hacen posible diversas simulaciones de sistemas de control;
está contenido en una carcaza presentada en la Figura 39.
2. Cualquier parámetro puede ser cambiado instantáneamente girando un
potenciómetro precalibrado, el cual conesponderá a la ñ¡nción de
transferencia que se muestra en el panel fontal y sobre la cual se estará
trabajando.

58
3. Los slstemas son slmultáneamente simulados y mostrados cuando se
interconectan las ft¡nciones de transferencia por medio de un cableado
sencillo.
4. Todas las funclones de transferencla son no inversoras, son slgnos que
camblan según los elementos.
5. El Simulador sirve como un componente sencillo y didáctico en un
laboratorio de slstemas de control.
El Slmulador puecle tamblén fácllmente asoclarse con otros elementos del
laboratorio (Generadores de Frecuencia, Osciloscopio, Circuitos en
Protoboard, etc.) que maneJen sus mlsmos parámetros de slmulación y asf
ser una completa henamienta de trabajo en el laboratorio.
3.3 DtSEtO Y COXSTRUCCTOX
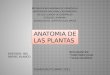
3.3.1 Panel Frontal Del Slmulador
Hay una puerta ablsagrada en la que se presenta la dlsposlclón del panel
(Figura 38), en ella está el menú dlsponible de funciones de transferencla y
elementos del slmulador este es:
o 5 Sumadores.
r 3 Funciones de Primer Orden.

59
3 Integradores.
2 Funciones de Adelanto y Atraso.
1 Limitador.
1 Zona Muerta.
1 Histéresis.
2 lnversores.
r 2 Funciones de Retardo.
o 1 On-Ofi.
r 2 Funciones de Segundo Orden.
2 Multiplicadores.
1 Controlador PlD.
o 5 Ganancias.
o 4 Dlsplays.
r Puntos de conexión para tierra.
Cada función de transferencia tiene un conector en su entrada y en su salida.
lmpreso entre estos dos, se muestra la función de transferencla del sistema
deseado o escogido. Los conectores muestran los lazos de salida y de
alimentación. Un potenciómetro de control está disponible para ajustar
cadaparámetro. Los potenciómetros y las llaves selectoras
permiten tener amplios rangos de simulación, eliminando la
necesidad de hacer múltiples circuitos para poder tener varios

60
rangos. Asf mismo el panel de control cuenta con displays, cada función de
transferencla trae su señal de sallda hacla el dlsplay; por medlo de un
conector esta señal llega a él y se presenta el valor del parámetro aJustado a
través del potenciómetro y con la escala dada por el valor de tiempo
seleccionada con la llave selectora; este método del display nos facilita la
lectura y nos da mayor preclslón.
En su parte Inferlor eÍste otra puerta ablsagrada en la cual están presentes:
o Los generadores de onda (Seffales Triangulares, Senoidales, Cuadradas,
de pulsos y dlente de slena ¡
r 1 Fuente dual de +/- 15 voltios D.C.
r 1 Fuente variable de 0 a 5 voltios D.C.
o Puntos de coneión para tierra.
r Espacio de trabaJo. (Por ejemplo para localizar protoboars o circuitos
adlclonales).
r Interruptor de encendido (Ohl-OFF).
3.3.2 Clrculterla

61
fa
>O FHHro
>a N-F
!f----------- oI t{L_t m¡
[?--]t[rl|+t Itttllr-l[l-ltnl|+t It+ll.lt-?]|[]l. l+lltttlI r-lt--;_lt-ll. l+lltttl| --r-l| 'l['?;l| ---tr-
|t-ErlI tEt IttltlI tFt Itt>ttttstll-r-lt'''II ---llr-
|I T;-] |ttctlI t5t Ittltltt5tlttBtll'i'll'l
1+ | \j{.,-'i^'i,-=;^.
F--itI r-tll'l"ll|, -T-ll¡'i 'I
af?
n'1""1í.; l-
d.?
f--t'
[:];.; ¿
eO
a
¡o¡t
6a
o
io:
¡a
a
¡.
60
o
:o
50
o
io
50
o
!o:
ño
a
9O
aFg
ñO?. l3l I
so l€ l*l-l--rl.o ¿I
' _t_.lll". l'l"l.l-
?l-_ll", ltll-
¡O
o
i.i
af
o
gS
i.i
af
o
¡'o i
?I
tzlt<ltmlltlt|,ltoll"l---o
?I
t=lt<ltmlt¡ltoltoll"l-r
o
ioi "o ¡ollI rli" Io l'-l
;.j ".-T
¡O
ErO
i.io
o
i.i
IGURA 38 Panel del s'imul ador anal óq j co de control de procesos

62
7g (Er
5$ crt
70 fir
ES trrl-5 <-r
?o frr
Flgura 30. Carcaza y sus dlmcnsloncs.
La fuente de potencia +l- 15 voltios D.C sirve de alimentación a cada uno de
los amplificadores.

63
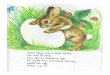
Todos los clrcultos presentados en el capltulo 2, más los generadores de
seflales, circuitos de los displays y fuentes de tensión, conforman la
circuiterfa de este proyecto, ellos fueron montados en circultos lmpresos.
Toda fa circuiterfa va en la parte interior de la carceza, dispuesta sobre un
doble fondo, las seflales de control salen a sus respectivos potenciómetros y
puntos de conexión en el panel a través de unos cables.La distribución de los
circuitos en el doble fondo es la presentada en la flgura 40.
El cableado intemo está identillcado con números caracterlsticos siendo
éstos:
I Salida de cada uno de los circuitos.
I Entrada de cada uno de los circuitos.
Entradas negativas de los circuitos sumadores.
7 Entradas positivas de los circuitos sumadores.
3 Cable de la llave selectora para el menor valor.
4 Cable de la llave selectora para el mayor valor.
3.3.3 Conetrucclón Físlca
El panel (Figura 38) y su carcaza (Figura 39) tueron diseñados y construidos
en lámina de acero calibre 18, con tratamiento contra conosión, acabado en

64
pintura gris, aislante. Las funciones de transferencla y parámetros dlbuJados
en el panel trontal fueron hechos en screen y toda esta parte va cubierta de
una fámina de acrflico transparente de 2 mm, protegiendo asf el grabado.
3.4 FUTCTOXAIUTEXTO
Esta es una herramienta sencilla de laboratorio, su funcionamiento básico
consistirá en la actuación de un control sobre una sefial de entrada, pero se
puede ir más allá, en el Capltulo 5 se presentarán varias simulaciones
posibles con este módulo y sus formas de conexión; no obstante se debe
tener en cuenta que esta henamienta ofece la posibilidad de manipular
muchos rangos de simulación, diferentes variables de control de manejo
sencillo e iliimitado, no rigido, ya que permite mediante un cableado senclllo, la
variación de los diferentes parámetros y un número de funclones de control
observar y analizar el compoÉamiento de control de procesos simulado
analógicamente.
Antes de entrar a meniobrar el Simulador Analógico es mejor leer el manual
de utillzación del mlsmo inscrito en el capitulo 4.

65
Tis+1/T2s+1 Tls+1/T2s+11/s inv inv
1/s+1 1/s+1 1/s+1
retardo retardo.
sumador lsumador lsumador
suma-dor
segundoorden
segundoorden
zonamuerta
suma-dor histe-
resis
k1R2 k3 R4
limita-dor
p¡d
k5
1/s 1/s
Flgura 40. Dlstrlbuclón de los clrcultos en el Doble Fondo

4. MANUAL DE SERVICIO
4.I. PRECAUCIOTES DE SEGURIDAD
4.1.1. Fuente de Potcncla
Este Simulador Analógico funciona con energla eléctrica de coniente altema
de I 10 Voltios, 60 Hz , teniendo en cuenta que tenga conexión a tierra flsica.
4.1.2.Instdaclón
Este Simulador Analógico ha sido diseñado para funcionar solamsnte con la
fuente de potencia indicada en el mismo. Se clebe ejercer cuidado para no
exponer éste módulo a sacudones innecesarios, humedad, polvo, lr¿ solar
directa o fuente de calor. Seleccione un lugar apropiado para éste módulo de
modo que se minimize la longitud del cordón eléctrico.
Deje suliciente espacio entre el equipo y la pared de modo que los
componentes de la unidad estén debidamente ventilados. No obstnrya
los ductos de ventilación que están en las partes laterales

67
4.2. DESCRTPCTOX DE LOS COTTROLES
4.2.1. Botón lntemrptor
POWER
Flgura 41. Botón lntemrptor
Este botón es para encender y apagar el Simulador Analóglco de Control de
Procesos.
4.2.2. Fuente de 5 Voltlos
Esta es una fuente con la cual se puede regular su voltaje de 0 a 5 voltios por
medio de un potenciómetro (3). Su lectura de voltaJe se logra colocando un
voltfmetro entre el punto de referencia ó tierra (1), y la salida de la tuente (2).
La máxlma conlente que puede maneJar es 1 Amperio.

68
O3
Flgura 42. Fuente de 5 Volilos
4.2.5. Fuente Dual de 15 Voltlos
Flgura 48. Fuente Dual de i5 Volilos DC
Sus valores de voltaje se pueden verilicar midiendo por medio de un voltfmetro
entre su punto de referencia ó tierra (2) y cualquiera de las dos salldas; sl lo
hace con la salida (1) obtendrá un voltaje de -15 Voltios DG y sl lo hace con
la sallda (3) obtendrá un voltaJe de +15 Voltios DC.
La máxima coniente que puede soportar es de I Amperio.
1A
o-1 5V
1A
o+15V

69
4.2.4. Generadores de Señales
W1 ffi'@z 97
re3
Flgura 44 Generadores de Señales
Cada una de las salidas lleva consigo una señal diferente [(l) senoidal, (2)
rectangular, (3) triangular, (6) pulsos y (8) diente de sienal; donde éstas
señales por medio de cables se conectan a la entrada de las li¡nclones de
control a las cuales se desea hacer el análisis.
4
oF
5
oA
IoF
0
oA

70
El punto 7 indlca una punto de referencla ó tlena el cual se úlllza sl es
necesario.
Los puntos 4 y 9 son potenciómetros que permite mriar la fecuencla del
generador de señales y los puntos 5 y 10 permite rariar la amplitud de la onda
de salida de los generadores de señales.
4.2.5. Sumadores
Flgura 45. Sumadores
En el panel de control hay un total de 5 sumadores dispuesto de tal manera
que el estudiante pueda maniobrar facflmente.
Los sumadores estan proüstos de 5 entradas, 2 posithras (1,2) y 3 negathns
(3,4,5) a las cuales van las señales que salen de los generadores, y de una
salida (6).

71
4.2.6. Controlador PID
La entrada de el PID está identilicado con el nrimero 1, la cuál rra conectada a
las entradas de las funciones proporcional, integral y derivativo, donde ellas
están provistas de llaves selec'toras (2,6,f 0) que permiten o nó el
funcionamiento de ésas funciones. Como por ejemplo permite trabajar con un
controlador PID con todas las llaves en on, ó con un controlador Pl con la llave
del derivador en off, etc. A la vez éstos tienen una salida común identificada
con (14).
Cada función posee sus elemento caracterfsticos:
4.2.8.1.P¡oporclonal
(3). Está identificado cor un jack rojo, él cual se conecta por medio de un
cable a cualquiera de los cuatro displays que posee el Simulador Analógico
para la lectura exacta de su ganancla.
(4) Es un potenciómetro que permite wriar el valor de la ganancia dentro del
rango seleccionado.
(5) Llave selectora que permite variar la ganancia de la función proporcional
(G10 ó de G100).
4.2.6.2- Integral

72
7) Está identlllcado con un jack roJo, él cual se conecrta por medlo de un cable
a cualquiera de los cuatro displays que posee el Simulador Analógico para la
lectura exacta de su constante de tiempo.
(8) Es un potenciómetro que permite mriar el mlor de la constante de tlempo
dentro del rango seleccionado.
(9) Llave selectora que permite variar el valor de la constante de tlempo de la
tunción integral (Glmseg ó de 0-1Omseg).
4.2.6.3. Derlvatlvo
(11) Está identificado con un jack rojo, él cual se conecta por medio de un
cable a cualquiera de los cuatro displays que posee el Simulador Analógico
para la lectura exacta de su constante de tiempo.
(12) Potenciómetro que permite variar el valor de la constante de tiempo
dentro del rango seleccionado.
(13) Llave selectora que permite rrariar el valor de la constante de tiempo de
la función derivativa (0-0.1mseg ó de 0.1-1 mseg).
4.2.7. Integrador
(1) Entrada del integrador.
(2) Salida del Integrador.
(3) Está identificado con un jack rojo, él cual se conecta por medio de un

73
11 O n O i3 O
Flgura 46. Controlador PID
cable a cualquiera de los cuatro displays que posee el Slmulador Analóglco
para la lectura exacta de la constante de tiempo.
(4) Potenclómetro que permite variar elvalor de la constante de tlempo dentro
del rango seleccionado.
(5) Llave selectora que permite variar el valor de la constante de tlempo del
integrador [(0.01-0.1Omseg ó 0.1-1mseg), (0.01-lmseg ó de 0.1-10 mseg),(0-
lmseg ó de 0-10 mseg)l-
O4OsO
T O I O e O

74
4.2.8. Ganancla
(1) Entrada de la Ganancia.
(2) Salida de la Ganancia.
Flgura 47. Integrador
(3) Está identificado con un jack rojo, él cual se conec'ta por medio de un
cable a cualquiera de los cuatro displays que posee el Simulador Analógico
para la lectura exacta delvalor de la ganancia.
(4) Potenclómetro que permlte variar el valor de ganancla dentro del rango
selecclonado.
(5) Llave selectora que permlte varlar el valor de la ganancia de la tunclón
ganancia [2(().r ó de 0-10),3(0-10 ó de Gl00)l .
2
o5
o4
o3

75
4.2.9. Segundo Orden
(f ) Entrarla del circuito de Segundo Orden.
Flgura 48. Ganancla
(2) Salida del circuito de Segundo Orden.
(3) y (5) Está identillcada por medio de un jack de color rojo, él cuat se
conecta por de un cable a cualquiera de los cuatro displays del Simulador
Analógico para la lectura exacta de la constante de amortiguamiento y la
fecuencia natural.
(4) Potenciómetro que permite variar el valor de la constante de
amortiguamiento dentro del rango seleccionado (0-2).
(5) Potenciómetro que permite variar el valor de la frecuencia natural dentro
del rango seleccionado [(0-1 0000),(0-1 00000)1.
o5
o43

76
4.2.10. Prlmer Orden
(1) Entracla de la tunción de Primer Orden.
(2) Salida de la tunción de Primer Orden.
sO 40 sO 6O
Flgura 49. Segundo Orden
3O 4O oO
Flgura 50. Prlmer Orden

77
(3) Está identlficado con un jack rojo, él cual se conecta por medio de un
cable a cualquiera de los cuatro displays que posee el Simulador Analógico
para la lectura exacta delvalor de las constantes de tiempo.
(4) Potenciómetro que permite mriar elvalor de la constante de tiempo dentro
del rango seleccionado.
(5) Llave selectora que permite rrariar el valor de la constafie de tiempo de la
función de primer orden.
4.2.11. Retardo
2
3O 40 50 60
Flgura 51. Retardo
(1) Entrada de la tunción retardo.
(2) Salida de la tunción retardo.
(S) y (e) Está ldentificado con un jack rojo, él cual se conecta por medio de un
cable a cualquiera de los cuatro displays que posee el Simulador Analógico.

78
(¿) y (5) Potenciómetro que permlte varlar los valorores de la fi¡nclón retardo.
4.2.12 Adelanto.Atraso
5o 6o
Flgura 52. Adelanto.Atraso
(1) Entrada de la función adelanto-atraso.
(2) Salida de la función adelanteatraso.
(3) Está identificado con un jack rojo, él cual se conecta por medio de un
cable a cualquiera de los cuatro displays que posee el Simulador Analógico
para la lectura exacta del valor de la constante de tlempo T1.
(4) Llave selectora que permite variar el valor de la primera constante de
tiempo [(0-0.1 mseg ó de 0-lmseg),(0-1 mseg ó de 0-10 mseg)].
(5) Potenciómetro que permite variar el valor de la primera constante de
tiempo dentro del rango seleccionado.
oo
oo

79
(6) Potenciómetro que permite variar el valor de la segunda constante de
tiempo dentro del rango seleccionado.
(7) Llave selectora que permite variar el valor de la segunda constante de
tiempo [(0-0.1 mseg ó de 0-1 mseg), (0-1 mseg ó de 0-10 mseg)].
(8) Está identificado con un jack roJo, él cual se conec'ta por medio de un
cable a cualquiera de los cuatro displays que posee el Simulador Analógico
para la lectura exacta de la segunda constante de flempo T2.
4.2,1t.Inversor
Flgura 53. Inveror
(l) Entrada de la tunción irwersora.
(2) Salida de la tunción inversora.
4.2.14. On-ofr
(1) Entrada de la tunción opoff.
(2) Salida de la tunción opoff.
2

80
Flgura 54. On-off
4.2.15. Llmltador
(1) Entrada de la función litadora.
(2) Salicla de la tunción limitadora.
Flgura 55. Llmltador
4.2.18. ]llsteresls
(1) Entrada de la tunción hlstéresls.
(2) Salida de la tunción histéresls.
(3) Potenciómetro que permlte variar los parámetros de la sallda de la tuncidn
histéresis.

81
2
3oFlgura 56. ]llstéresls
4.2.17. Zona Muerta
(1) Entrada de la función de zona muerta.
(2) Salirla de la tunclón de zona muerta.
(3) Potenciómetro que permite nriar los parámetros de la salida de la tunción
de zona muerta.
Flgura 57. Zona muerta

82
4.2.18. Multlpllcador
Esta función es una futura ampliación del Simulador Analógico. Por ahora no
funciona.
4.3. REQUISITOS PARA I{ACER COTEXIOXES ADICIOXALES AL
SIMULADOR AXALOGICO
Si se yan a efectuar coneiones adicionales al Simulador Analógico hay que
tener en cuefia que :
-Tenga un voltaje plco a pico no superior a 5 Voltios.
-La impedancia de entrada es menor a 10 Kiloohmios.
-La trecuencia debe estar dentro de un rango de 30 lüa 2O Kilohez.

5. SIMULACIONES
Este capltulo contiene algunos ejemplos de simulaciones en el simulador
analógico de control de procesos, para estos ejemplos se presentan la
respuesta en un computador.
Como ya se explicó en el capftulo 2, los rangos de simulacióón lL¡eron
determinados conforme a la frecuencia de trabajo, permitiendo ésta
frecuencia una visualización en el oscilocopio de las acciones de control
llevadas a cabo por los circuitos. en los siguientes ejemplos se presenta la
entrada y la señal de salida luego de ejercer un control sobre ella.
Los valores de ganancias y constantes de tiempo fueron escogidos con base
a la simulación efectuada bajo el programa Matlab, donde se capta la mayor
apreciación de la salida de éste lazo de control , gue se obtiene ante una
señal de prueba a la entrada del mismo.
5.I. PRIMER EJEMPLO

84
T3s+1/T4s+1
Flgura 58. Lazo de Contro del Prlmcr Efcmplo
Sea un sistema de control como el que muestra la flgura 58:
Donde las constantes de tiempo y las ganancias se escogieron dentro de los
rangos manejados por el Simualdor Analógico de Control de Procesos siendo
éstas:
Kp=o.25
Ti=0.5 mseg
Kr=2
T2=1 mseg
T3=0.5mseg
T4=0.4mseg

o 0.8E.uo.E< 0.6
1.4
1.2
0.4
0
85
4.5 5
x 1o-3
0.5 1.5 3.522.53Time (secs)
Flgura 59. Respuesta del Prlmer Efemplo

86
Con éstos datos se puede obtener la figura 59 que és la sallda de éste
sistema de control.
La idea es que al implementar éste sistema en el Slimulador Analóglco debe
dar no iguaf pero si cercano a la respuesta obtenida en el computador.
5.2. SEGUTDO EJEMPLO
Sea un sistema de control como el que muestra la figura 60:
Flgura 60. Lazo de Gontrol del Segundo Efemplo
Donde las constantes de tiempo y las ganancias se escogleron dentro de los
rangos meneJados por el Slmulador Analóglco de Control de Procesos slendo
éstas las siguientes:
PRIMER
Kp=12.49

87
Ti=o.54 mseg
Td=O.14mseg
Estos tres valores se hallaron apliicando el método de Ziegler-Nichols a la
gráfica slguiente (Figura 61) , siendo ésta la señal de sallda de una tunclón de
primer orden dada debido a una sefial de prueba (escalón unitario), a la
entrada de la mlsma.
Los valores de las constantes de tlempo de la planta se escogleron de
1mseg. Ahora la salida de éste sistema con las constantes especificadas
está en la figura 62.
La idea es que al implementar éste slstema en el Slmulador Analóglco debe
dar no igual pero si cercano a la respuesta obtenida en el computador.

88
o3.{JE.E
1
0.9
0.8
o.7
0.6
0.5
0.4
0.3
0.2
0.1
0L0 0.001 0.002 0.003 0.004 0.005 0.006 0.007 0.008 0.009 0.01
Time (secs)
Flgura 81. Sallda de una Funclón de prlmer Orden

89
o'g:tfIF
<f:
-t--' -" -
.\ ............- -..- -...
._.__......-...-.......r......................._...........L...................._-......._..1...._._..........-..............i......_.......
0.020.002 0.004 0.006 0.008 0.01 0.012 0.014Time (secs)
0t.0
Flgura 62. Respuesta del Segundo Efemplo

BIBLIOGRAFIA
COUGHLIN, Robert. " Circuitos Integrados Lineales y Amplilicadores
Operacionales'. 2ed.México. PrenticeHall. Hispanoamericana,
1 982.
DISTEFANO, Joseph. "Retroalimentación y Sistemas de Control". 2ed.
Santafé de Bogotá. McGraw-Hill Interamaricana, 1992.
MALONEY, Timotlry. "Electrónica lndustrial, Dispositivos y Sistemas" . 2ed.
México. Prentice-Hall Hispanoamericana, 1 980.
MALVINO, Allbert. " Principios de Electrónica". 4de. México. McGraw-Hill,
1984.
OGATA, Katsuhiko. "lngenierfa de Control Moderna". Zed. Móxico. Prentice-
Hall Hispanoamericana, I 980.

91
PETERSON, Gerald. 'Basic Analog Computation'.2ed. New York.The
Macmillan Compalry, 1968.
VALENCIA, Heman .' Sistemas Automáticos de controlo. Medellin. Unlversidad
Pontificia Bollvariana, Facultad de lngenierfa Eléctrica y Electrónlca,
1991.

AXEXOS

o aoI
xa
xI a
tortt
cYo F osl
("(f)c; o 8ñ¡
c{(\lo
@c;
tf)
ñlo(v)
oc!o
YJ
Fo
Ff,o
N
t(ttl
¿
o:¡ó>oá6-JET¡
v,
NtlgzTo'
=
':'o
€U)
I
\stlJ
@
E¡:.9
¡:qtlJ5oÉ,F
r
@I
o
gqLJ
;¿5-il
oüOF¡=|!oU'.!c\fo.=
CF.si
.=oo
=
cotlF
=!,
0)
!
o
GJ
ItlUzU'g
_o9Ee2+FPtt3
E
tl
o(r
F
0,
iF
3c('
(Jt¡l
¿
ANEXO A Ci rcu i to de I os qeneradores de Señal es.
E
.:
o
q
n
()'
Ntl
FtN
ofl
tl
oo
.eEh=oxg(,)-aoo¡-@o€.96Epoxo=Uf
3tc¿
E!tCD
3o¿loIo
oooF
-É-(,rJt¡J
ct
8oooqo
GooEo
o.oE¡
()0
3Er¡,ñ33Ioo;
T ?x a
o
E
Io
a
o oI
rOci I u)
R¿5
gR¿5
xoE 3q
F
G
=oao
o(,
Q)
l¿.
E
Exo
=
E4
oe,
r
o]an
EcÉ
rctoBv)
o
J
4
o
@q,
EQ'F
i
oo@
o4
o>og6,i>-.>>)vOxb>ooYF o-Y CDO
=-o o)
q>(f
.E
:^x4v-dEg<d-c!á!:o.goo
) 'l' E
X6E
oo+
6
+loN
FN
E +ro+l
E
E
o
I
f
q
q
a
oooorJ
c
.F
o
ñoáo.=JOU')q¡rp*at
.J)
U'6
o
o+lil(,I
¿
o
C)
.>
faJ')
3ff.\
'É!lhslFItF
o
q
IJ
o
o
oEoQ¡
3
6ooq¡
o
G
ooco
oq
o
=oUJF
"9.,¡d H'oF^OU:=lo
z-TO
; -i,! ÉÉ+rü*;üe-E:'--
s i :i i lr€fitit¡itEEiigiii É
E ;iÉ É É ;: rt aE áE;3iEEi:giii E
lFiii i'ii i I g€gi:l;iliitÉigig,
i
P e ¡i
, , il F =i;rl¡
vbE5!5ñJ; Iiia i' ;" iÉF; '66
z,fD
F?ÍUFoz
=F.-vx
| ór IlNl
tso
I
!e
3E c
o
6tc
(oCO
@
{{
Ir
o3 >g'.iEP--a;z
N rttN
rnN
?
rO@
I
oF.f
o
onE
o
oo oJ
E,
F
ooF
s¡o(,¡¡Eo
ooE
ath
G
aaoo0o-
oao).,.-.-;.
to
rta
co:9.tc\c
O¡
G'q
I
o
(Jt
ototo
oco
o
E
tEa,t-tGov,
ocoEot6o(lEoFCDcIooo
o
o)
q,
Lo
oth(J
o-
\r(0€(9ol¡¡
Shft,,--

$(9()U
F¡3!::
EE!s
.9tr
?áo;-
r9o]0)
ót
.E
=o
Eao
.E
(J
at)
oFo-oo@
o
E
q,
oo6
o.ñ
I
o3o
e
!9i{o|lror¡t€
f
oo
o.,;
ooo@
E
?
o-
t¡
oIoo(,a!
G
)ooo
o
t!E
'1.E¡
5
¡o
tIiIs6¡lI
ooG
o
F
oqto
coo
toYrEA Lol¡vlfl¡v¡
oo@
oo
ao
oocEoofL
r--tTl I lÍ: :-: 3 i ¡ 3-lovtlo^ lta¡tlo o¡¡r|nlorl-Í
-t.t'
od9
¡.9.2o(,3aEoot,c,3E.oao.
sl,'.":-.;.---. $
(9C)ul
F
oED
.9oo6,Eo
¡!¡¡lxlt
^Lal
YOYOt \.ú trJo
3
fI(,
qIloa
-9*5¡ÉoI
o
o
df
t-l 9l'oI
o
(

, I't i's lr
oJ!a)Joo
Joqo.Lo
ó()-9€o¡G
e,6foea,
o.,
"'iF5¡6
N
J
o{o
?oc{
ogoo.9
-e.gG
osoaogo
oC)oo=o6o
=
oz(9
,oE>) |t\\or¿¿ -o-¿
f
o
3u,
G
o
E
o
or
oooo
o(J
oz0E
zo¡
?o0
oz(,,of>f \<. !?\< < t
+II
ooaru
.ErG
xUJ
a,
oooocooo'óooo-

tit6
ñoN
U
9
9:í'? {úu I
:!i
il: t-6J-I l"¡ l'
I
t--
!
;:'l
Circurto de Displays. - ==;99
:::¡i 3;¡:::¡i il I:i: I:
fil'.-'qi"!J,'
rJ 'Jf !'i
'i\r,, trñl
g r i i ' ur;,E, F..
, il ¡, i ii¡ i *¡t¡¡ saiÍrF s¡H ?i ; i;: ¡t;ff:E? i::::; ?ii ?i * ;li * É;F;i r¡rHiE ü';i :¡¡s;i¡.i i*i;i ¡Ésq¡i €
,iiiii tir;:is*rr3i;É- *Es:iá i;;ir3sEÉr3Hii=*iE;+áÉ r€;iÉs¡ !ü.. É;EqF;* n
DÉ
Dá
-l-, -
co:u!
c.o
(_)
.!ccf,E
u-
bS
i,:
o
tt
Eú,o_
c
J1
o::c
o
I
!c
l.) -
¡¡üaq...?O.t
:o¡lo
-f
';aD:
+.:
ñ.!!O
rLI
cCT
cc
-9
ll
c
¡'
/'20n[:] bi.ir,
-¡:f

$*sl(Jlr¡r I3sF.*thsül'o
ÉÉt;* u$ii-isrü*:É¡; s
iliii iligggiiiii¡igÉ i'
'iF
1É¡¡!ggg!E;i**: lis ;;t¡g¡ÉiE; igftÉÉÍ
gÉ á
íiiiiÉillÉiigii ÉiÉ iiiiiiiiii iiiiiiiiÉ i
NooN(,Ot¡¡o
T'6
3oNoo¡¡¡o
!r,t'it,
foñlo(JU
F(,oU
ó.9S<=2sá:EEe¿ q.EsáiÉo X g:.tó= .=ó
ít; :Ég- 9 6=
É?: ¡ É
;s f É [¡li;s;ÉgE Ég:¡
iE€¡áfr53 ; +' É B
gáEÉ+gOIO O- OF
EFE8.E:tc;; '-s$;s:¡;is !E !::á¡= tÉ
iiF;t? lffi-*-Fiirti+ :EFi;lrt:: :É:', Él=|" l'l'lii :t:i ¡l-l I ll:: i::i ;l;l l'-l lisi :i:i ilsl ll;l l;E.:::: tlÉl l;El lf!g:::: $l ¡¡e*t l;Eo :::: El-1--T---f-f
i! iisu ,;l l. I ll
IEgIIÉF iIffi
D EqE E E () tr E
()o L)
Ix6E
tf,ú;
r C\¡
+ 3g, +(o no
+
Frf) 8 I \l E
ol (o o(l o ú)
qo
E@rt
6l
I
@
s Iqo
c!
I
Io
@
o
.9!tooooF
Io+d> c.iooJE8.b
c@
oq€
EoF
!Go
>ao:LóFE>gt6FOÉO>o
T'Eotc
tófóo
LóFE>gtoeO>o
s¡
6
o
zooo
c(9
o
ootl
ao
G.E
oF
r¡ttl
ao
o.E
oF
(',
ozooa
.9oJattftooVg6ul(Joso
>N
'óoJ
ttl
a€eo9.rO.9oe@>N
ooco()
o-ooNjotl
>-
tl
o
c(9
tE
RCll q>ñ
oooo3.E3()
Gz
¡CL
(t) ;?g>Eo'ccDt9cg6OcE
+
o
C'¿oU'
No'oc@
oct.E
Joc
d)
otooGd¡
o
oo
oooN!onDoc:)
s¡19
EoOJE6cl
6osJ
g*ocó.9>t>9_EEü)(J
oEo
=ao¡t
&.o-!ov.=>E6bTFCeo@o-¡ü¿>9u5Fo=
=o
;9E>(J¿tP;=cDccoo(Jar
6@
.E
oFocot
()@¡Fc.tn2Qo¿'ro .j
G
o
orr¡'-c.gt€6eioro6o.ceF.9bc¡F
.9
.9oo(Jo
6ooEoFooN
oo€a,oqo
ooo,EoF'óo

aIOQ
¡ü@J
É t :iÉe
t;ilaiigX ; Erióí @ 9.;oE üfi9,l¡tá3
sEiÉifF€ig ¡EIÉFEÉI qt
o=o.
ouJJoo
6oCo
oo;(,eF
otED
¡t
! "!tui É
E;¡¡E:g€E BiÉigEg
üiEü:tgÉ
Ii!ÉilHÉ
;ÉHEgáfiÉ
llitlú
rfto)(f)
c{
eI()u,
o)3s(,(Jt¡J(o
tsr:::-- r- toñl'9C)@
EN19oU
!
si
,rii; *Ég*in"P'EssÉ;g€ riji¡Eig¡i,;
EiÉiiliÉiiigEiiÉi¡
o'6
-FtERgeoO* r¡¿
Eñ9ñEovU6o¡
ozz
o=E lo=d) a¡ F:
$i 5*Ox OEsf 8E
rshi$iÉiE,iigr
¡lr iÉiigÉÉ ÉiLÉ
3ggü