Embed Size (px)
Citation preview
SENSORES
São dispositivos que são sensíveis à um fenômeno
1
São dispositivos que são sensíveis à um fenômeno físico (luz, temperatura, impedância elétrica etc.) e
transmitem um sinal para um dispositivo de medição ou controle.
CARACTERÍSTICAS DOS SENSORES
Erro– é a diferença absoluta entre o valor real do sinalde saída entregue pelo sensor e o sinal ideal que estedeveria fornecer para esse valor da grandeza física.
2
CARACTERÍSTICAS DOS SENSORES
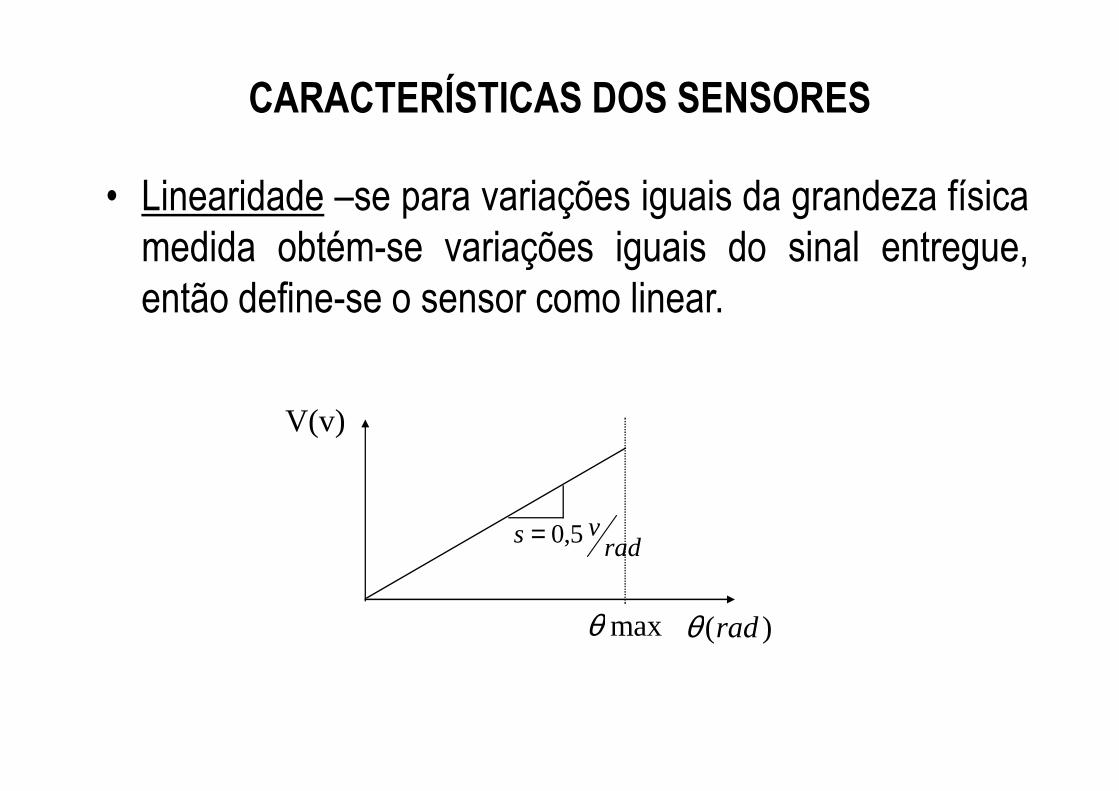
• Linearidade –se para variações iguais da grandeza físicamedida obtém-se variações iguais do sinal entregue,então define-se o sensor como linear.
V(v)
)(radθ
radvs 5,0=
maxθ
CARACTERÍSTICAS DOS SENSORES
• Sensibilidade– É a capacidade de perceber mudança.
– É a relação entre o sinal elétrico entregue na saída e agrandeza física medida.
CARACTERÍSTICAS DOS SENSORES
• Range– Quanto consegue medir.
– São todos os níveis de amplitude da grandeza física medida nos quais se supõe que o sensor pode operar dentro da precisão especificada.precisão especificada.
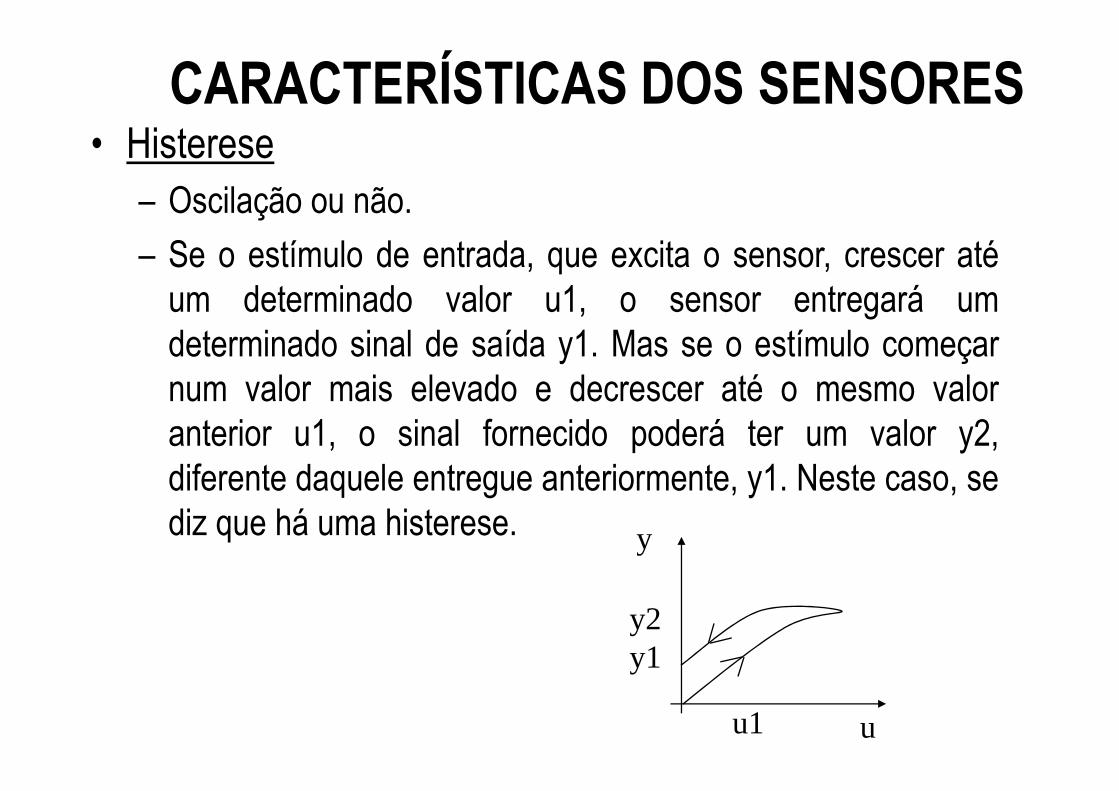
CARACTERÍSTICAS DOS SENSORES• Histerese
– Oscilação ou não.
– Se o estímulo de entrada, que excita o sensor, crescer atéum determinado valor u1, o sensor entregará umdeterminado sinal de saída y1. Mas se o estímulo começarnum valor mais elevado e decrescer até o mesmo valornum valor mais elevado e decrescer até o mesmo valoranterior u1, o sinal fornecido poderá ter um valor y2,diferente daquele entregue anteriormente, y1. Neste caso, sediz que há uma histerese.
u
y
u1
y2y1
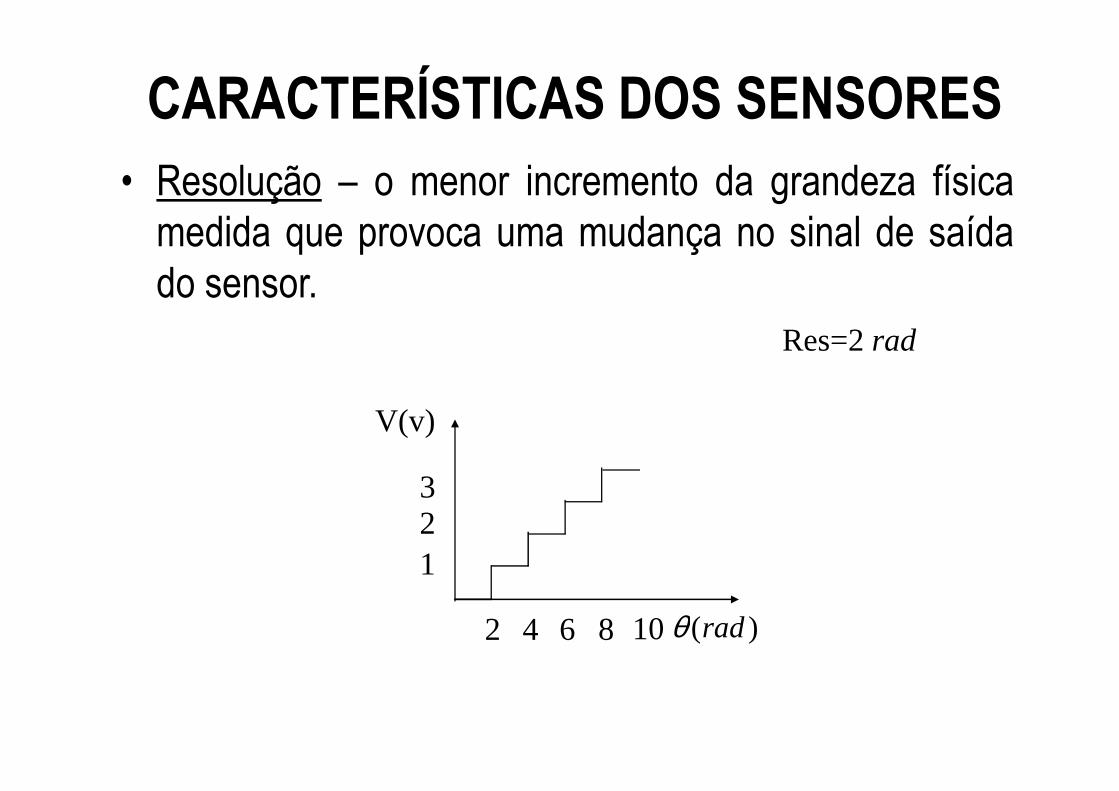
CARACTERÍSTICAS DOS SENSORES• Resolução – o menor incremento da grandeza física
medida que provoca uma mudança no sinal de saídado sensor.
Res=2 rad
V(v)
)(radθ2 4 6 8
123
10
Eletrônica Básica
Eletrônica Básica
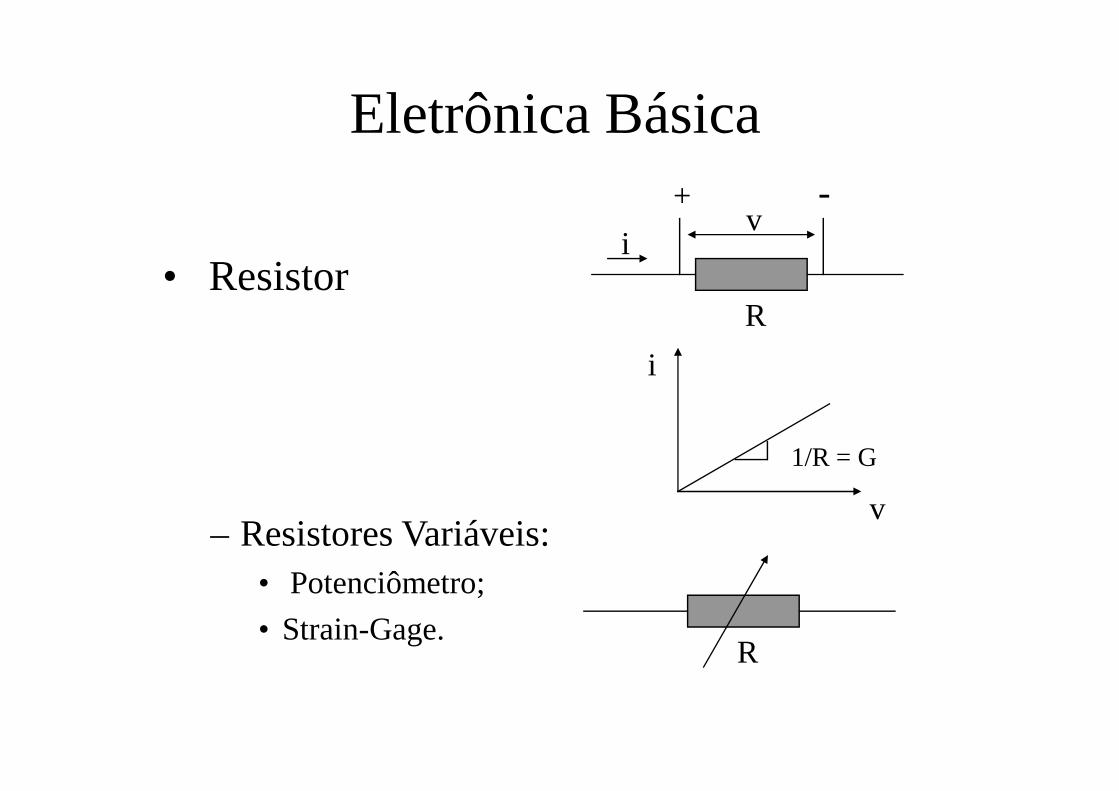
• ResistorR
vi
+ -
i
– Resistores Variáveis:• Potenciômetro;
• Strain-Gage.R
v
1/R = G
Eletrônica Básica
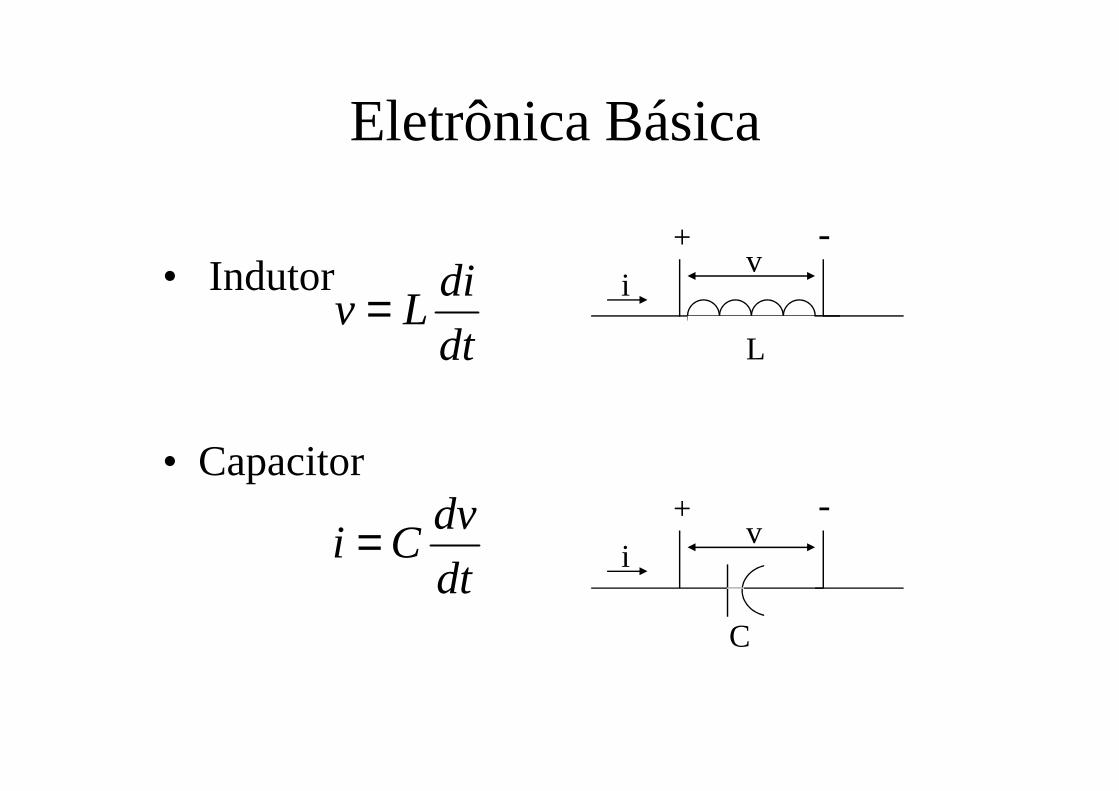
• Indutor
dt
diLv =
vi
L
+ -
• Capacitor
dt
dvCi =
+ -
C
vi
TIPOS DE SENSORES
•Sensores de posição e orientação
•Sensores de força
•Sensores de tato
•Sensores de velocidade
11
•Sensores de pressão
•Sensores de aceleração
•Sensores de temperatura
•Sensores de proximidade/presença:
•Sistemas de visão

SENSORES QUE VEREMOS
•Chaves de fim de curso
•Interruptor de lâminas
•Sensores potenciômetros
12
•Sensores potenciômetros
•strain-gage ou extensômetro elétrico
•Encoder incremental
•Encoder absoluto
•Tacogerador

CHAVES FIM DE CURSO
São interruptores que são acionados pela própria peçamonitorada.
Basicamente, a chave fim de curso tem um atuador que éacionado pelo objeto a ser detectado e que, por sua vez,
13
acionado pelo objeto a ser detectado e que, por sua vez,atua um contato elétrico que irá enviar a informação.
.
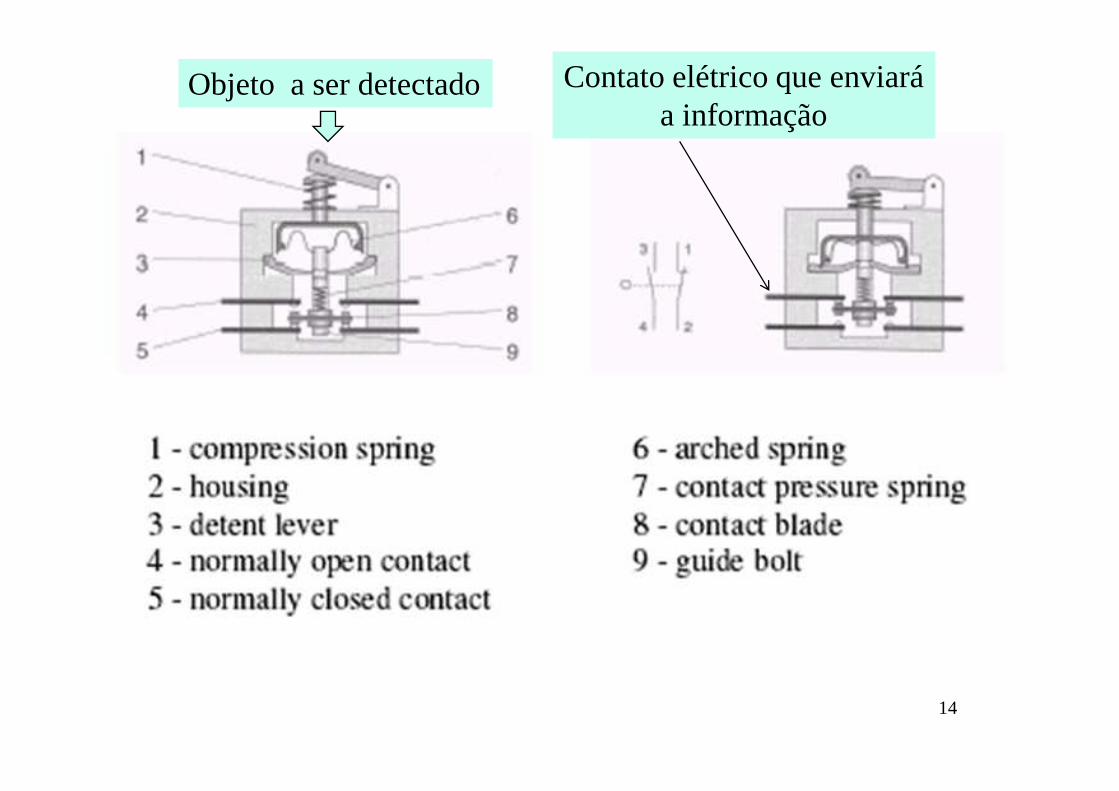
Objeto a ser detectado Contato elétrico que enviaráa informação
14
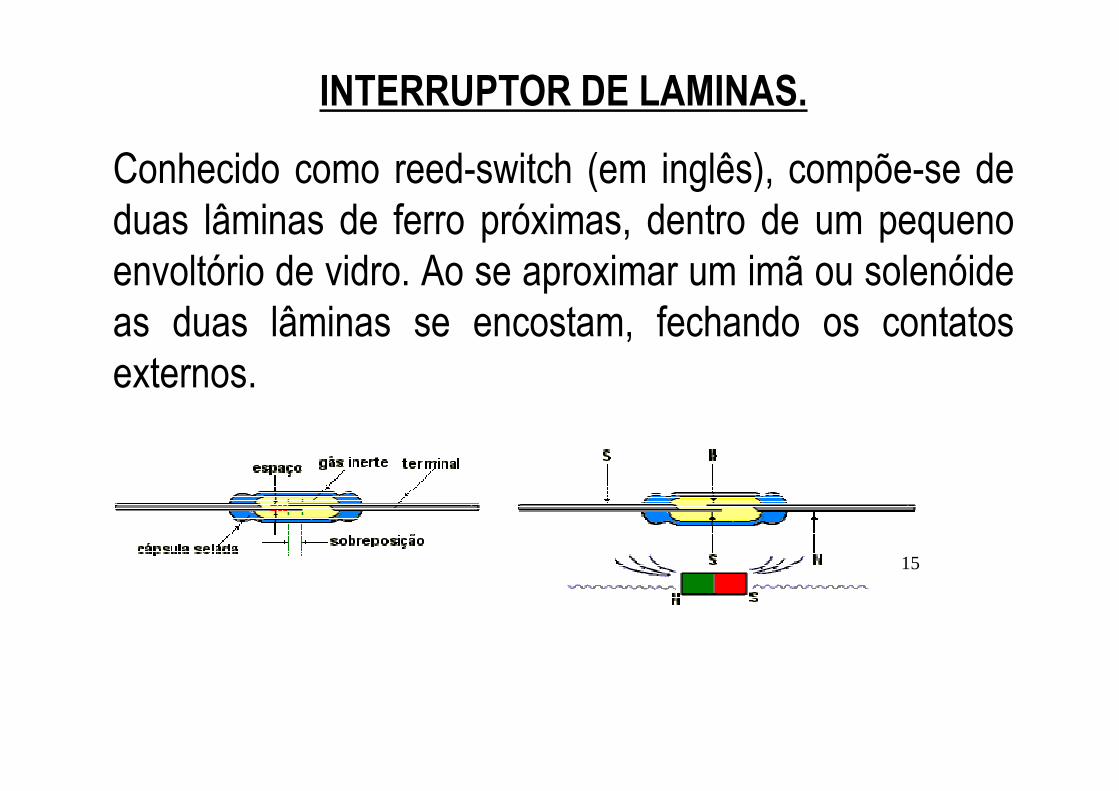
INTERRUPTOR DE LAMINAS.
Conhecido como reed-switch (em inglês), compõe-se deduas lâminas de ferro próximas, dentro de um pequenoenvoltório de vidro. Ao se aproximar um imã ou solenóideas duas lâminas se encostam, fechando os contatosexternos.
15
externos.
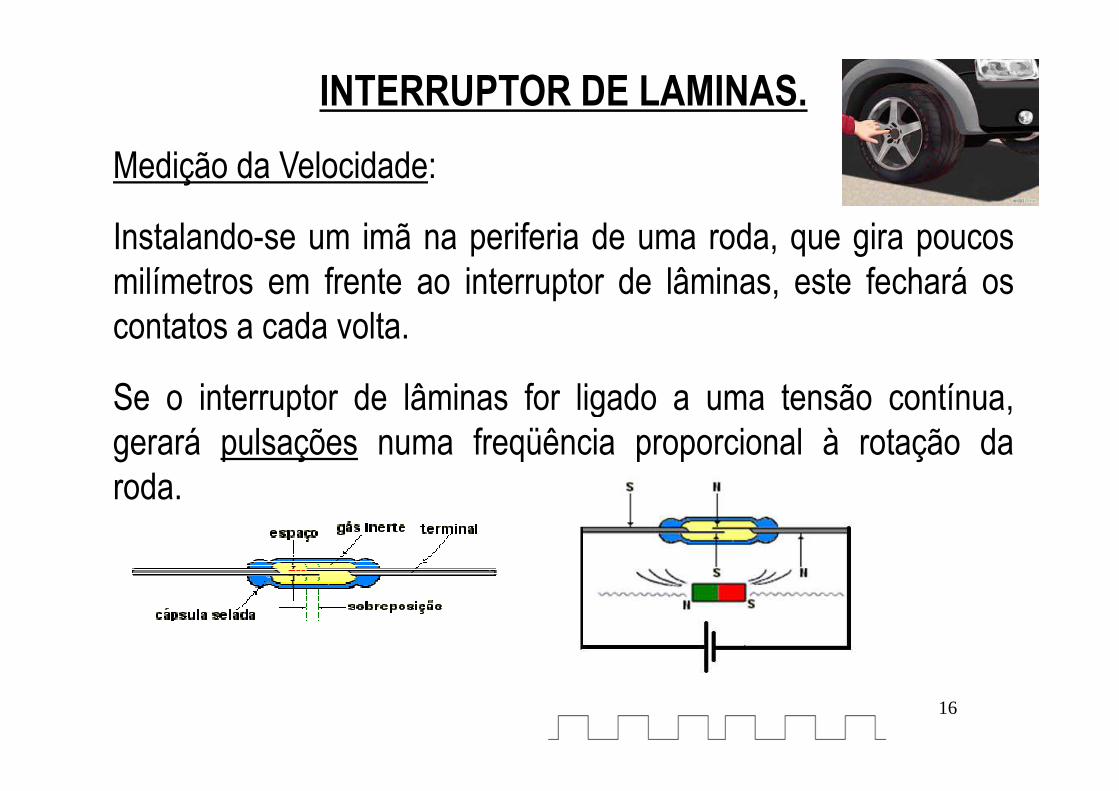
INTERRUPTOR DE LAMINAS.
Medição da Velocidade:
Instalando-se um imã na periferia de uma roda, que gira poucosmilímetros em frente ao interruptor de lâminas, este fechará oscontatos a cada volta.
Se o interruptor de lâminas for ligado a uma tensão contínua,
16
Se o interruptor de lâminas for ligado a uma tensão contínua,gerará pulsações numa freqüência proporcional à rotação daroda.
SENSORES POTENCIOMÉTRICOS
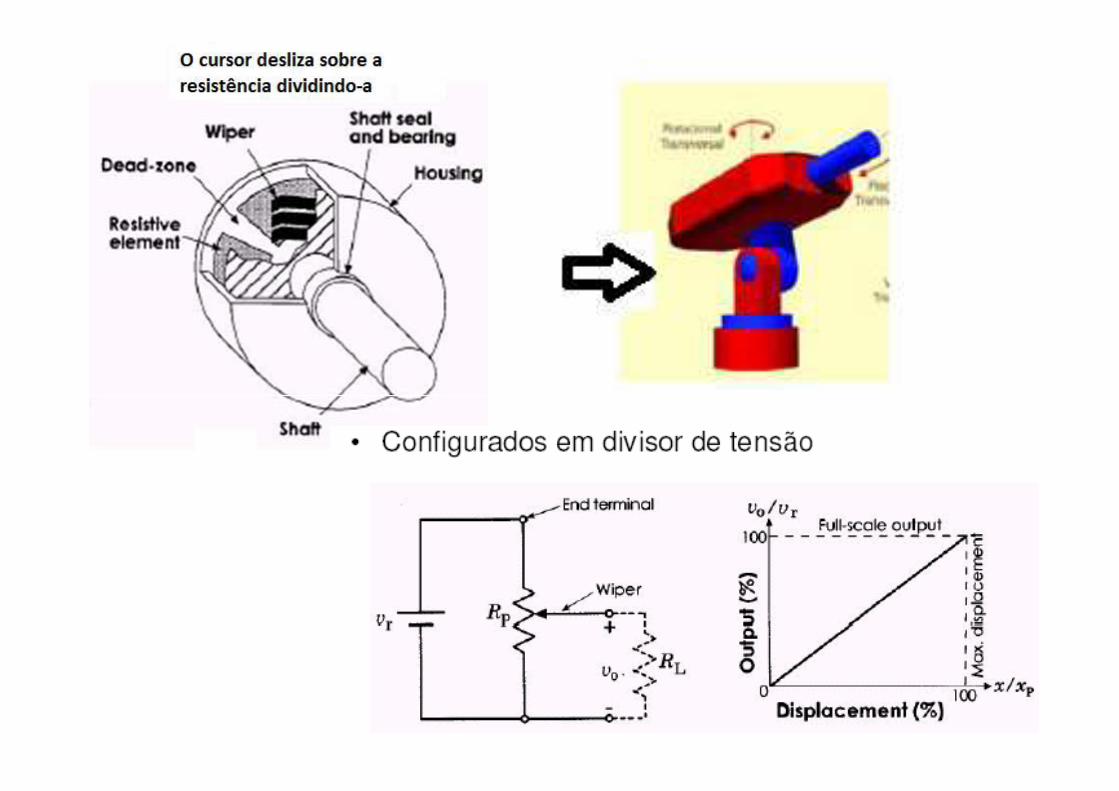
É um sensor que mede a rotação de um eixo cujo princípio defuncionamento se baseia na variação de resistência de umpotenciômetro conectado mecanicamente a um eixo paramonitorar sua posição.
MOVIMENTOS DE ROTAÇÃO DE UM EIXO
17
MOVIMENTOS DE ROTAÇÃO DE UM EIXO
Em uma articulação de um braço mecânico por exemplo, sãoutilizados potenciômetros de rotação com um ângulo máximode rotação de quase 360º. Estes potenciômetros, conectadoscomo divisor resistivo, apresentam uma variação linear datensão de saída com a rotação do eixo.
18

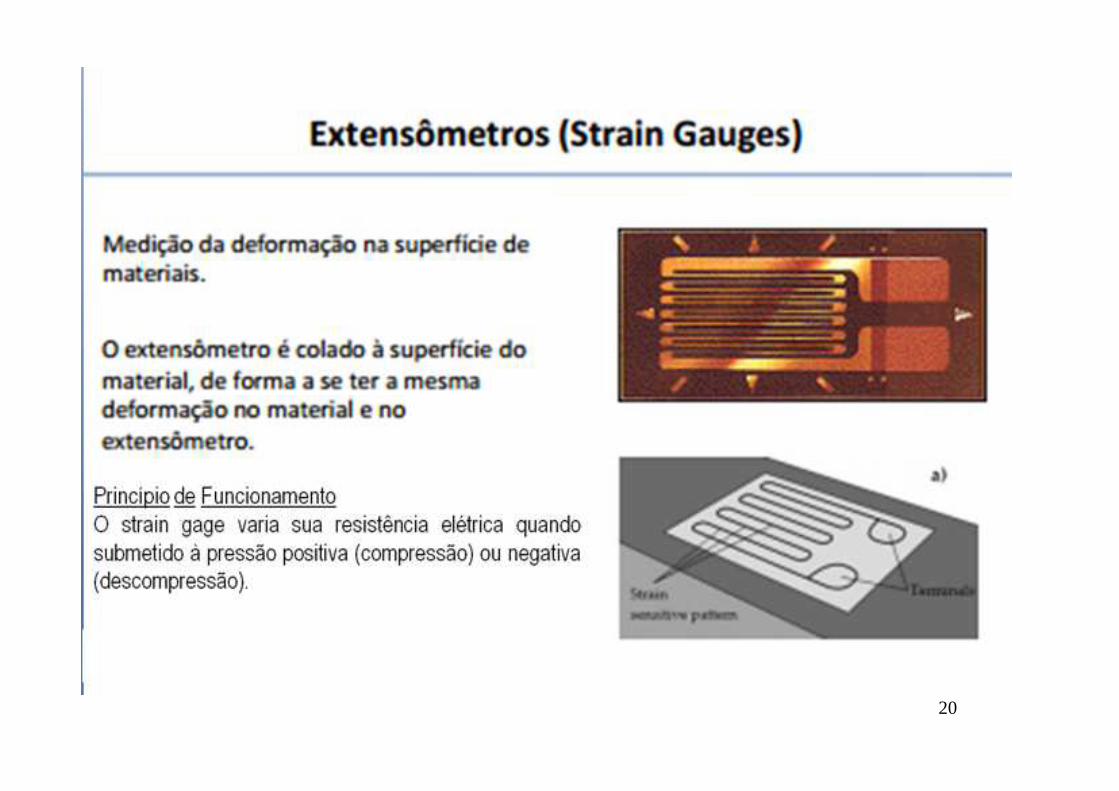
Strain Gage
19
Strain Gage
O strain-gage ou extensômetro elétrico, é um resistor elétrico que muda sua resistência quando sofre
deformação.
20
21
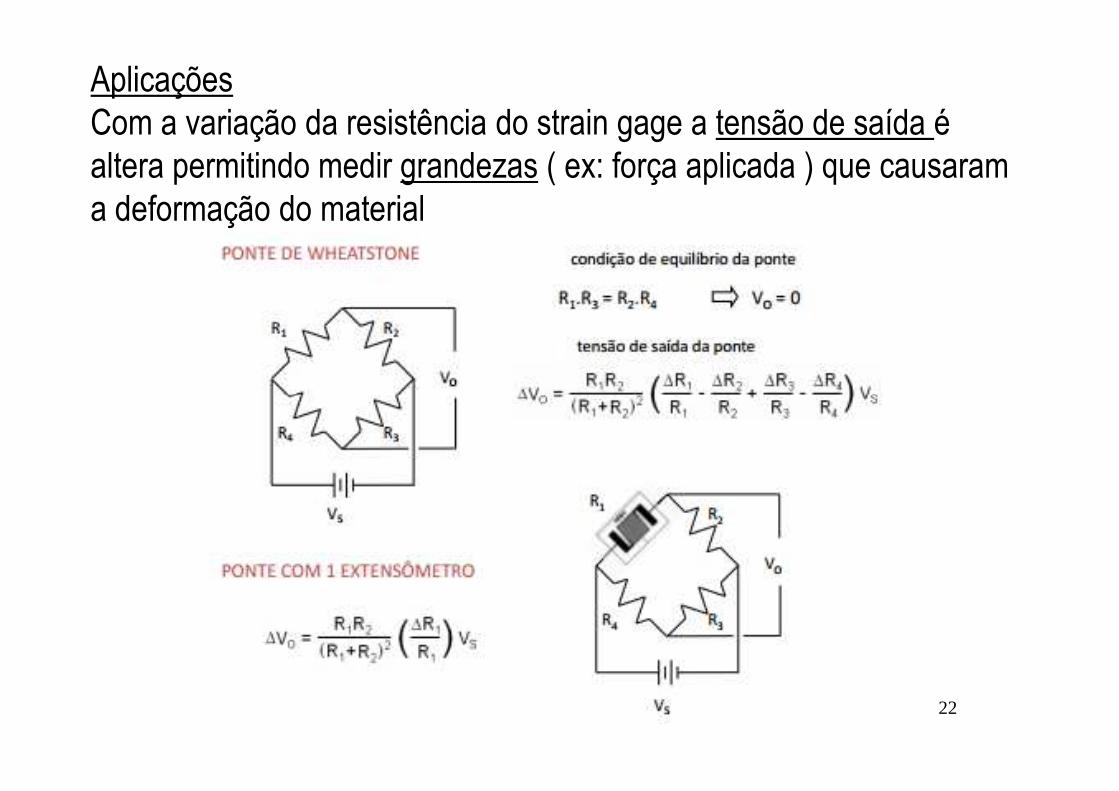
AplicaçõesCom a variação da resistência do strain gage a tensão de saída é altera permitindo medir grandezas ( ex: força aplicada ) que causaram a deformação do material
22
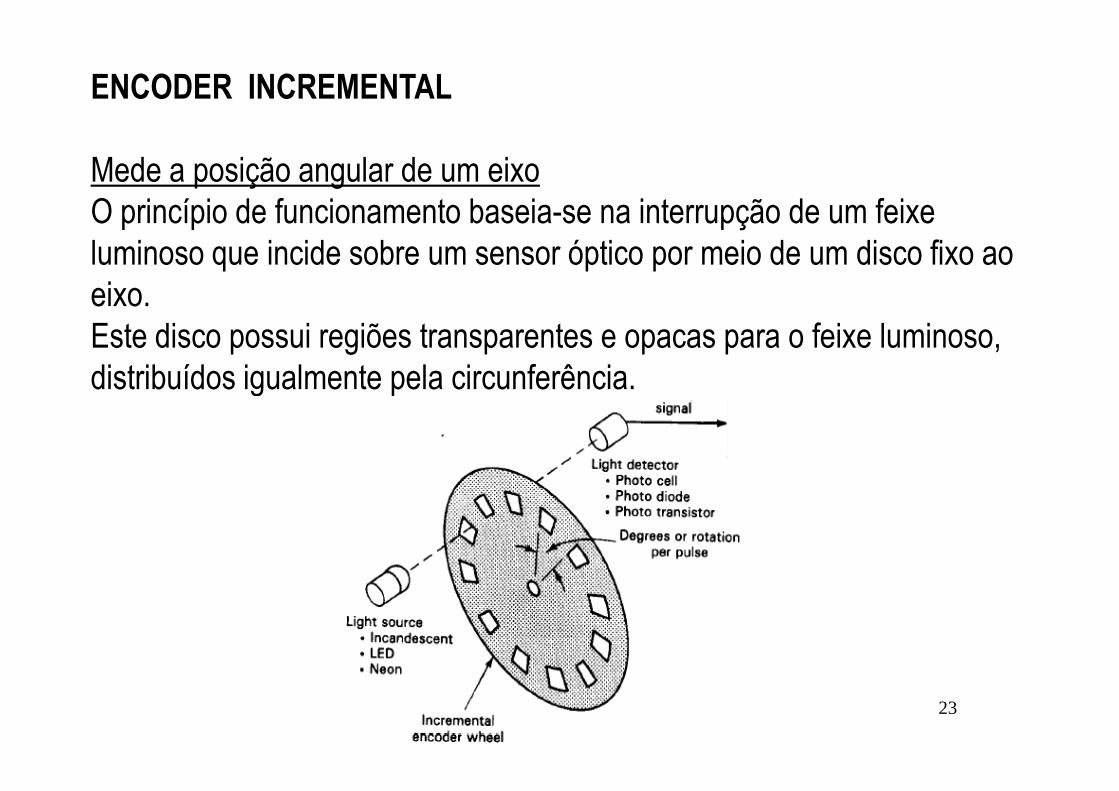
ENCODER INCREMENTAL
Mede a posição angular de um eixoO princípio de funcionamento baseia-se na interrupção de um feixe luminoso que incide sobre um sensor óptico por meio de um disco fixo ao eixo. Este disco possui regiões transparentes e opacas para o feixe luminoso,distribuídos igualmente pela circunferência.
23
distribuídos igualmente pela circunferência.
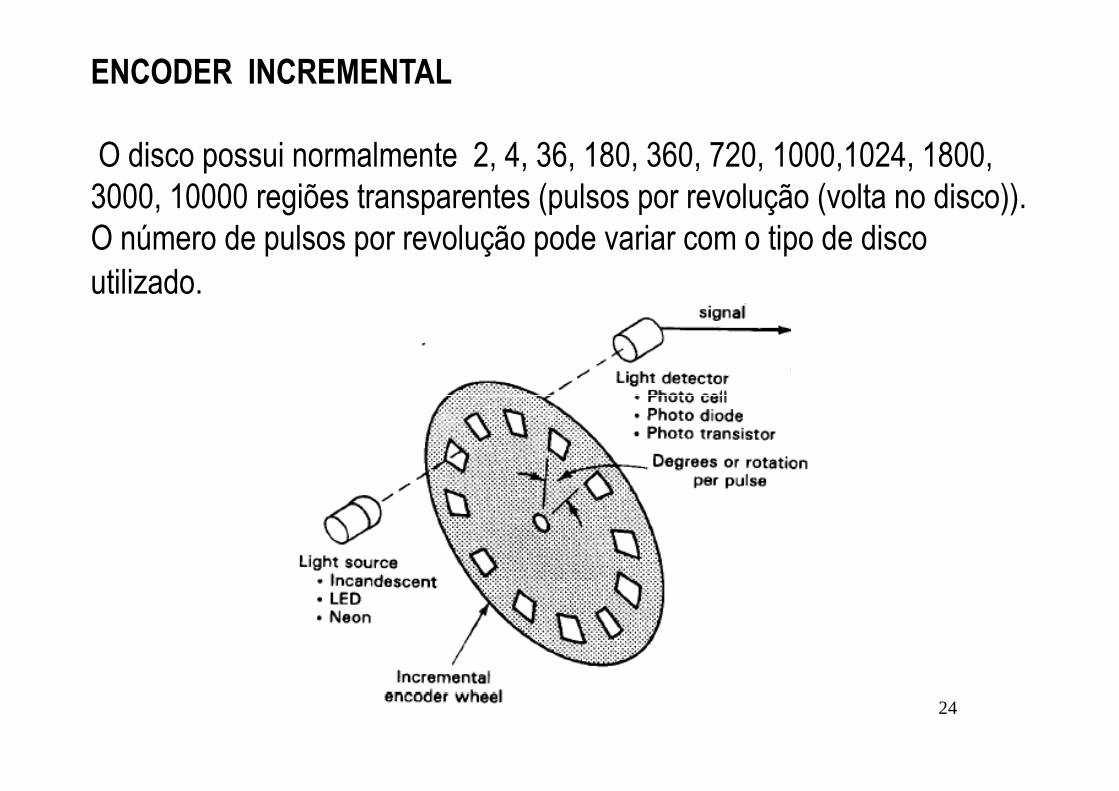
ENCODER INCREMENTAL
O disco possui normalmente 2, 4, 36, 180, 360, 720, 1000,1024, 1800, 3000, 10000 regiões transparentes (pulsos por revolução (volta no disco)).O número de pulsos por revolução pode variar com o tipo de disco utilizado.
24
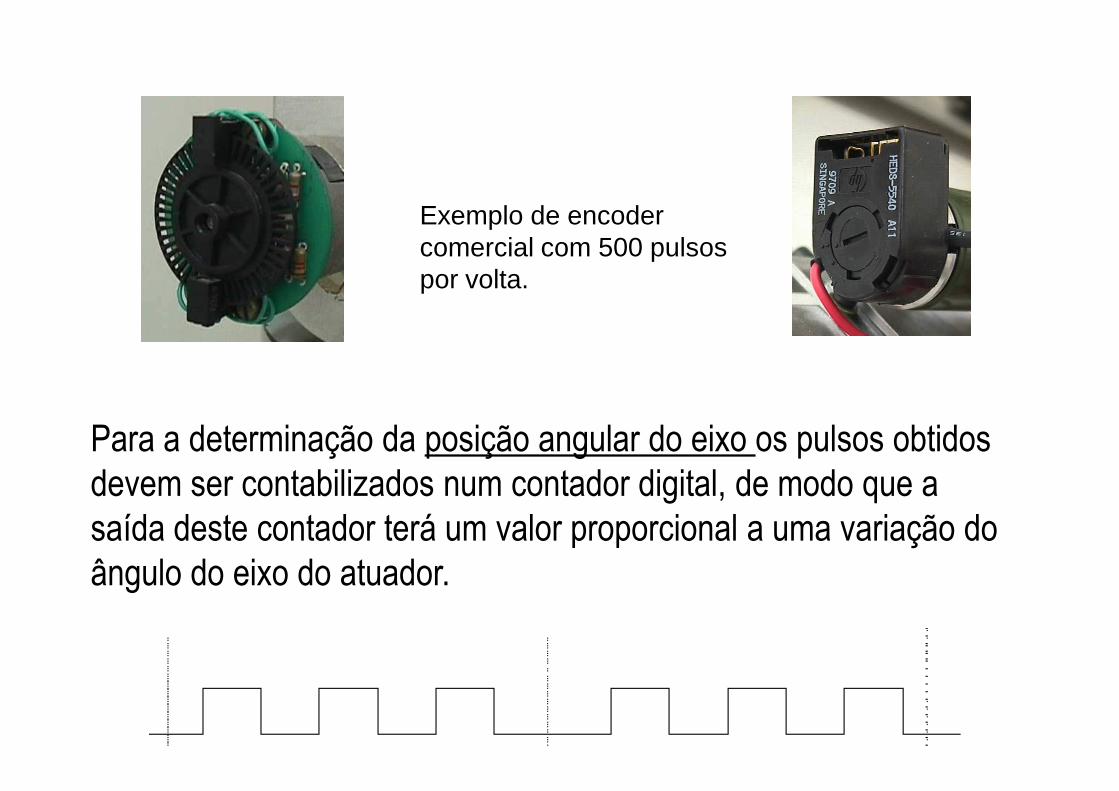
Exemplo de encodercomercial com 500 pulsos por volta.
25
Para a determinação da posição angular do eixo os pulsos obtidos devem ser contabilizados num contador digital, de modo que a saída deste contador terá um valor proporcional a uma variação do ângulo do eixo do atuador.
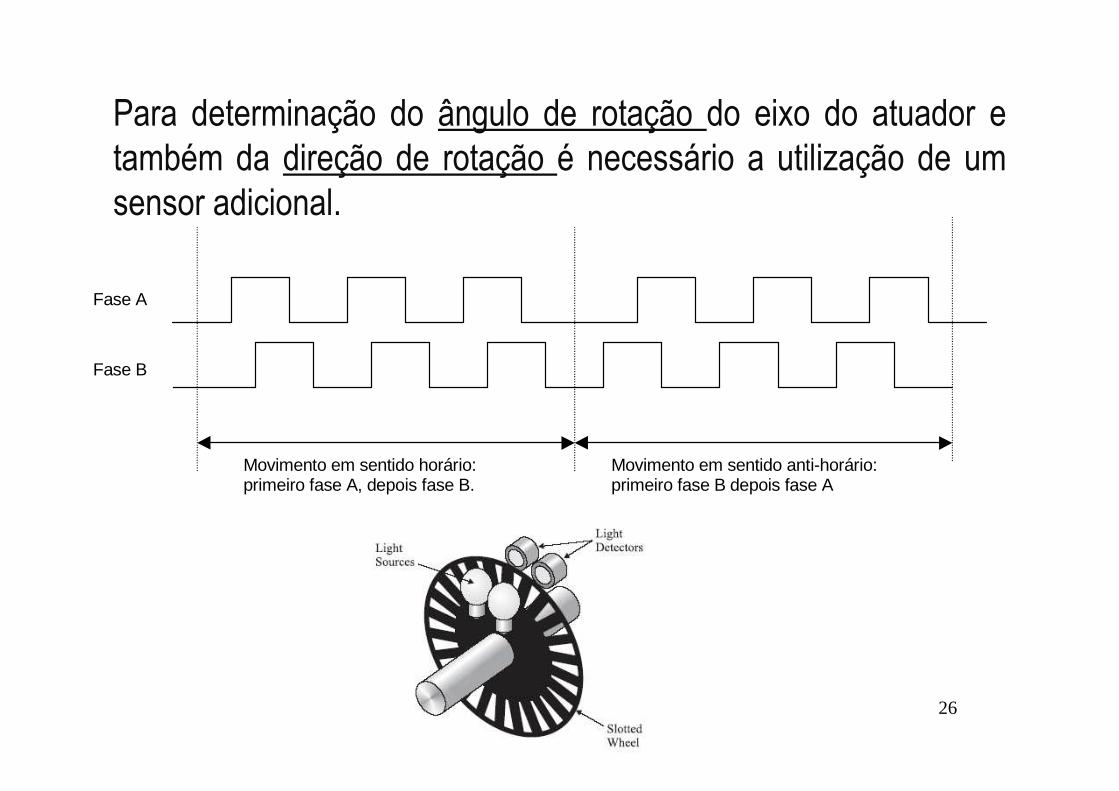
Para determinação do ângulo de rotação do eixo do atuador etambém da direção de rotação é necessário a utilização de umsensor adicional.
Fase A
Fase B
26
Movimento em sentido horário:primeiro fase A, depois fase B.
Movimento em sentido anti-horário:primeiro fase B depois fase A
ENCODER ABSOLUTO
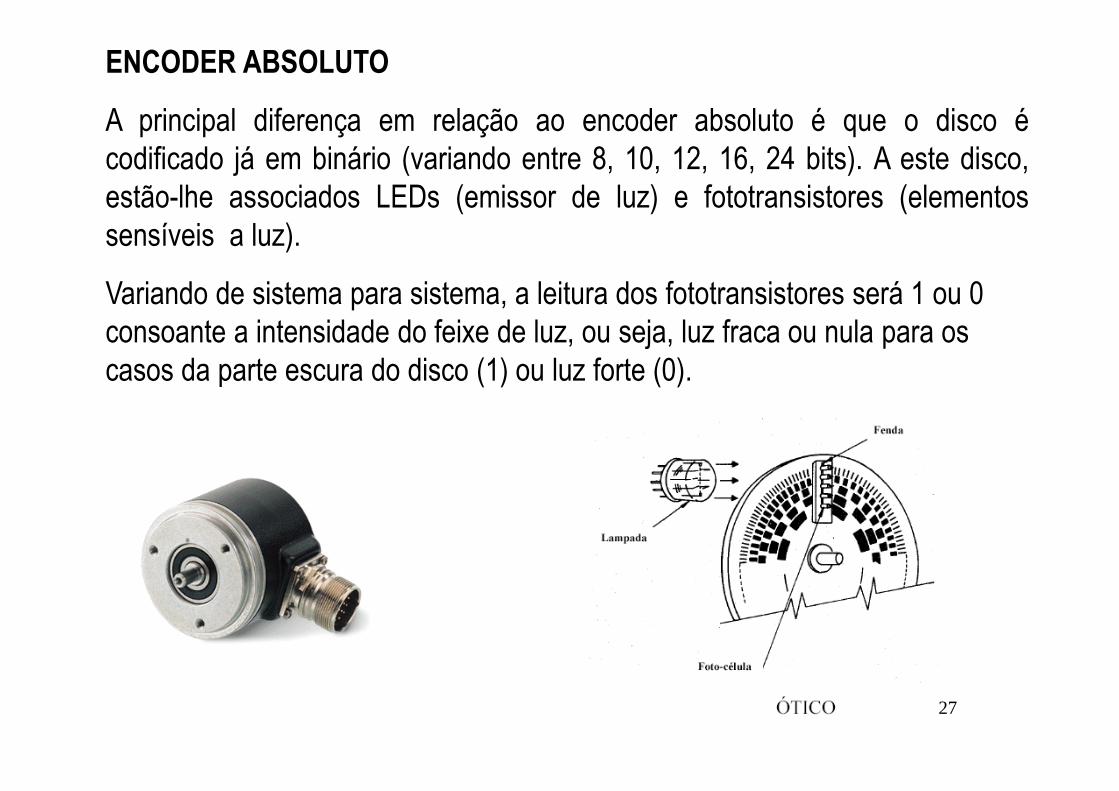
A principal diferença em relação ao encoder absoluto é que o disco écodificado já em binário (variando entre 8, 10, 12, 16, 24 bits). A este disco,estão-lhe associados LEDs (emissor de luz) e fototransistores (elementossensíveis a luz).
Variando de sistema para sistema, a leitura dos fototransistores será 1 ou 0 consoante a intensidade do feixe de luz, ou seja, luz fraca ou nula para os casos da parte escura do disco (1) ou luz forte (0).
27
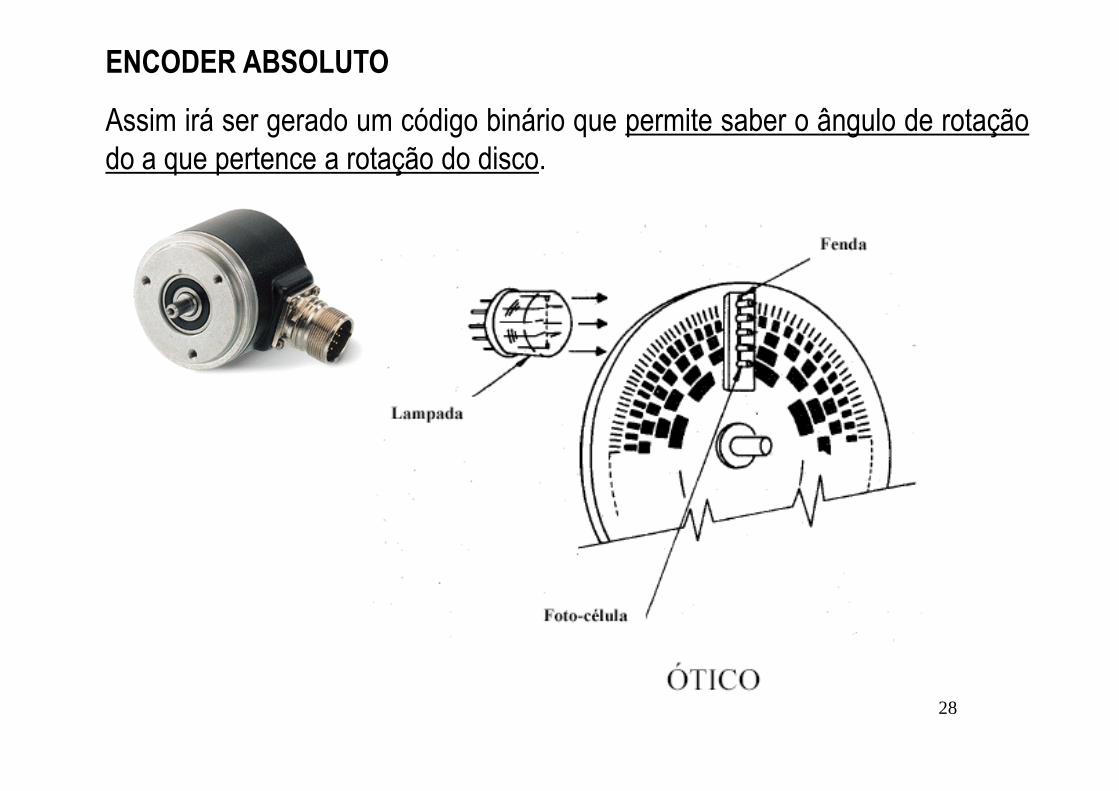
ENCODER ABSOLUTO
Assim irá ser gerado um código binário que permite saber o ângulo de rotaçãodo a que pertence a rotação do disco.
28
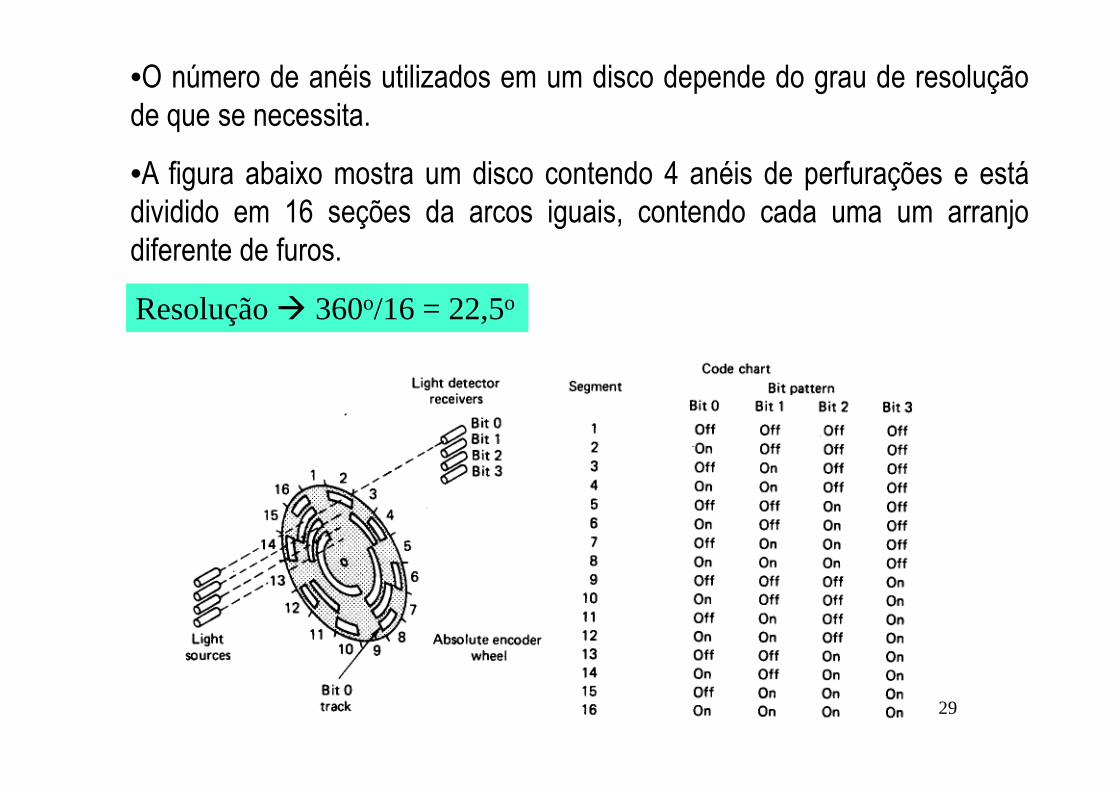
•O número de anéis utilizados em um disco depende do grau de resoluçãode que se necessita.
•A figura abaixo mostra um disco contendo 4 anéis de perfurações e estádividido em 16 seções da arcos iguais, contendo cada uma um arranjodiferente de furos.
Resolução � 360o/16 = 22,5o
29
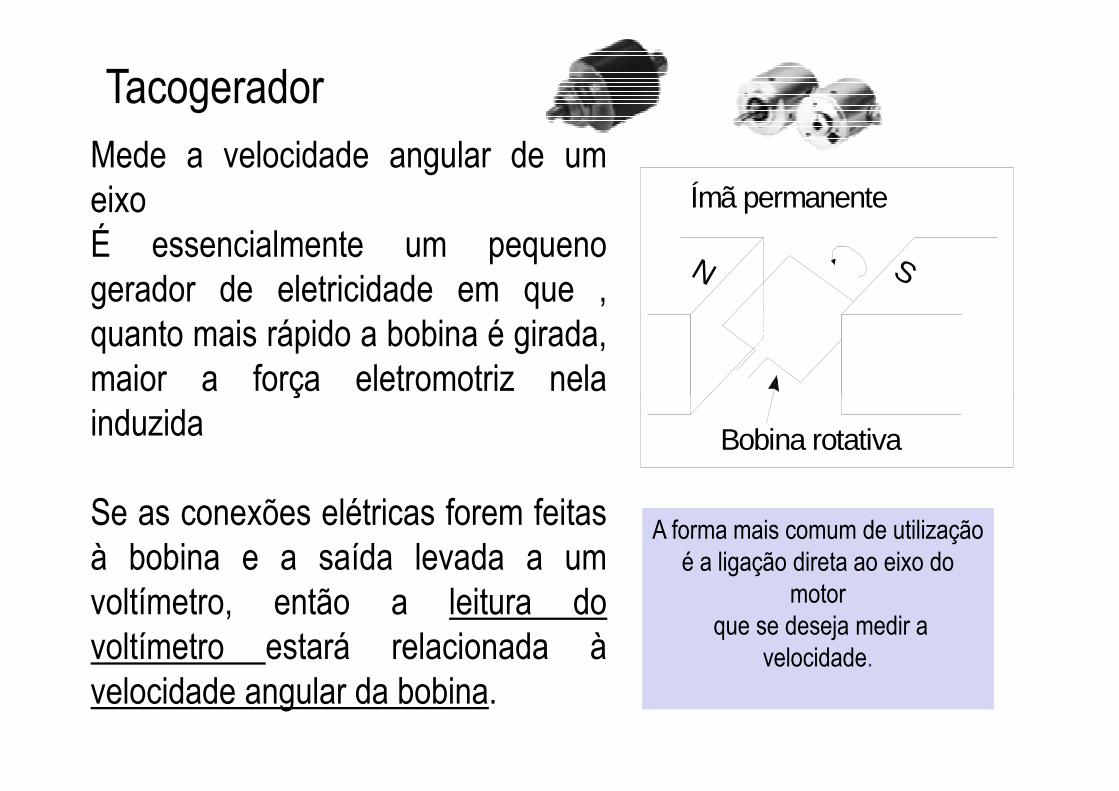
Tacogerador
Ímã permanente
N S
Mede a velocidade angular de umeixoÉ essencialmente um pequenogerador de eletricidade em que ,quanto mais rápido a bobina é girada,maior a força eletromotriz nela
Bobina rotativa
maior a força eletromotriz nelainduzida
Se as conexões elétricas forem feitasà bobina e a saída levada a umvoltímetro, então a leitura dovoltímetro estará relacionada àvelocidade angular da bobina.
A forma mais comum de utilizaçãoé a ligação direta ao eixo do
motorque se deseja medir a
velocidade.
31
São equipamentos automáticos compostos por câmeras,elementos ópticos, hardware e software deprocessamento de imagem, que simulam a visãohumana.
Essas imagens são processadas e fornecem
SISTEMAS DE VISÃO
32
Essas imagens são processadas e forneceminformações para que o sistema tome decisões econtrole processos.
Essa tecnologia é aplicada em diversos segmentosindustriais .
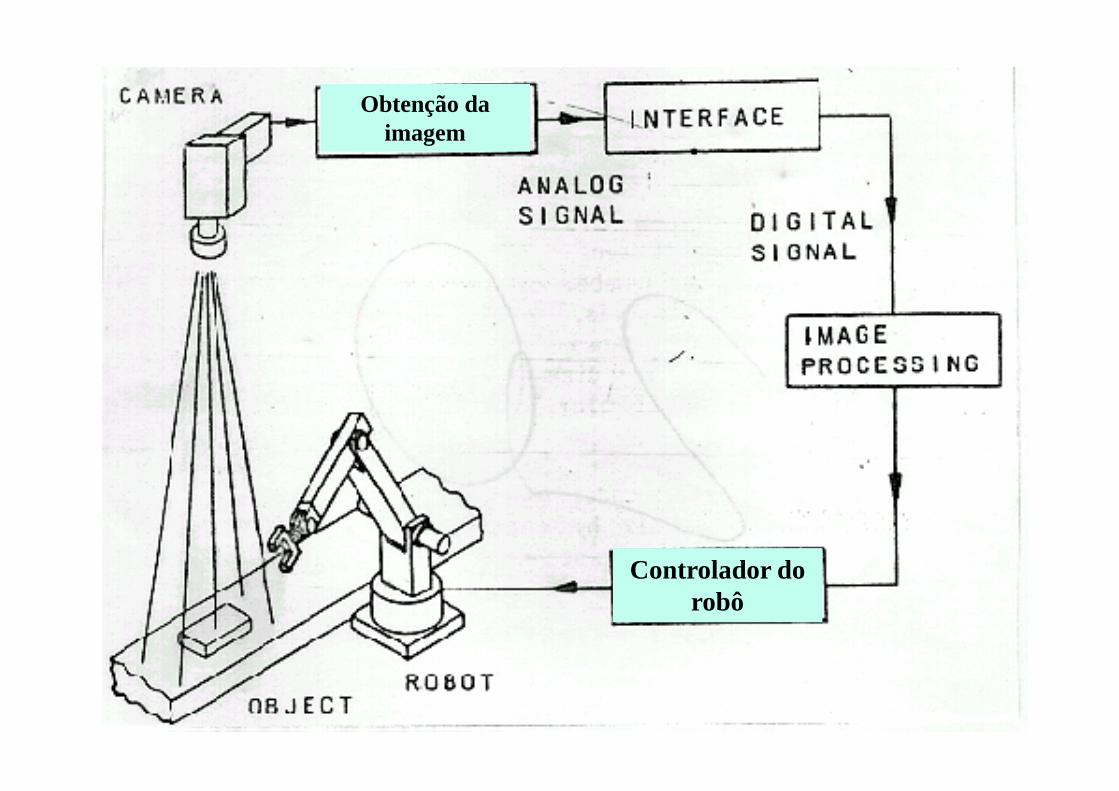
Obtenção da imagem
33
Controlador do robô
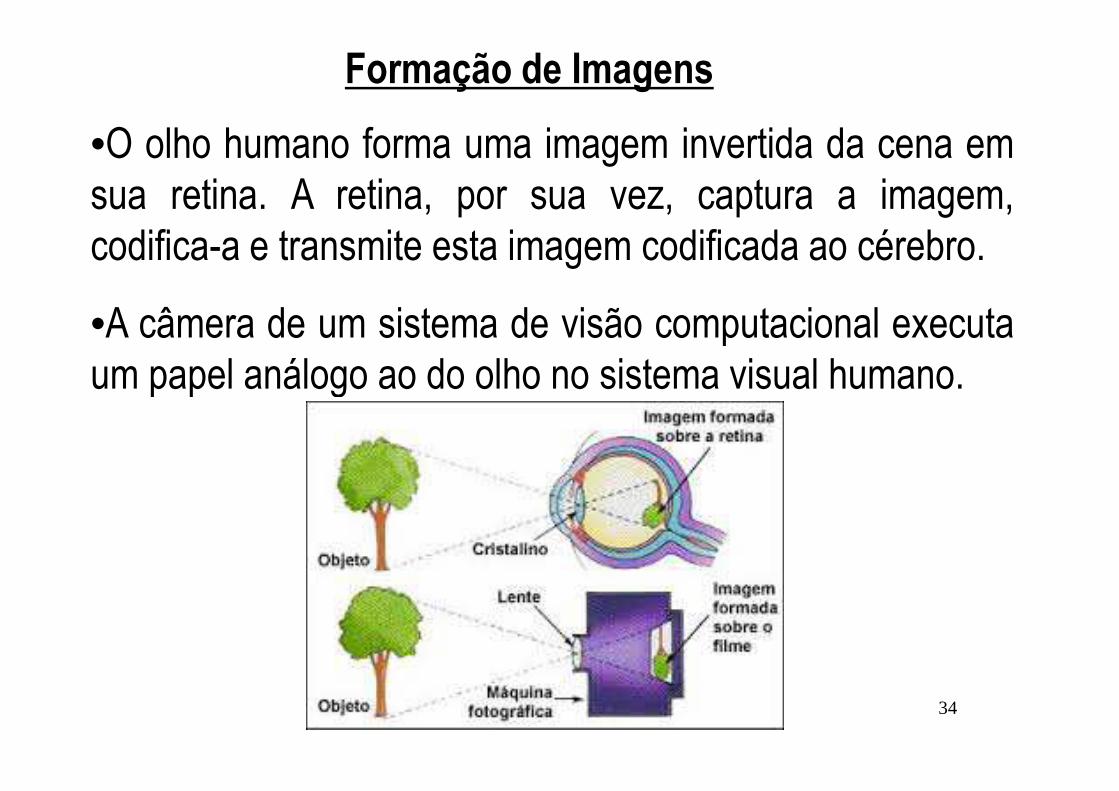
•O olho humano forma uma imagem invertida da cena emsua retina. A retina, por sua vez, captura a imagem,codifica-a e transmite esta imagem codificada ao cérebro.
•A câmera de um sistema de visão computacional executaum papel análogo ao do olho no sistema visual humano.
Formação de Imagens
34
um papel análogo ao do olho no sistema visual humano.

Imagem Digital
�Um sinal que tenha um domínio continuo e uma faixa de variaçãocontinua é chamado de sinal analógico; já um sinal que tenha umdomínio discreto e uma faixa de variação também discreta échamado de sinal digital.
�A Imagem Digital é uma matriz de inteiros, onde cada inteiro
Formação de Imagens
35
�A Imagem Digital é uma matriz de inteiros, onde cada inteirorepresenta o brilho da imagem num tempo discreto e num pontodiscreto do plano da imagem. Um ponto desta matriz é denominadapixel. pixel
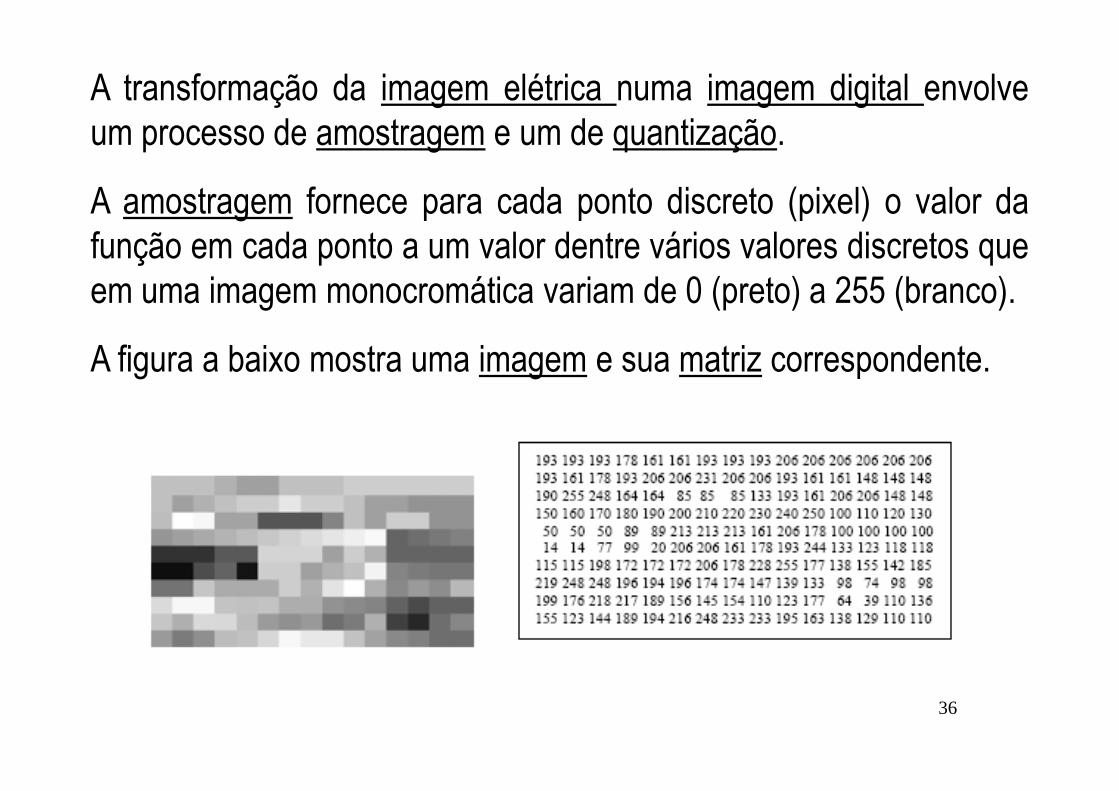
A transformação da imagem elétrica numa imagem digital envolveum processo de amostragem e um de quantização.
A amostragem fornece para cada ponto discreto (pixel) o valor dafunção em cada ponto a um valor dentre vários valores discretos queem uma imagem monocromática variam de 0 (preto) a 255 (branco).
A figura a baixo mostra uma imagem e sua matriz correspondente.
36

EXEMPLO DE APLICAÇÕESEXEMPLO DE APLICAÇÕES(apenas para conhecimento)
37

Mini Robô Móvel Guiado por Visão Local
Trata-se de um Mini Robô Móvel Autônomo capaz de seguir um caminho desenhado na superfície o qual se move
38
desenhado na superfície o qual se move a partir de imagens capturadas
localmente.
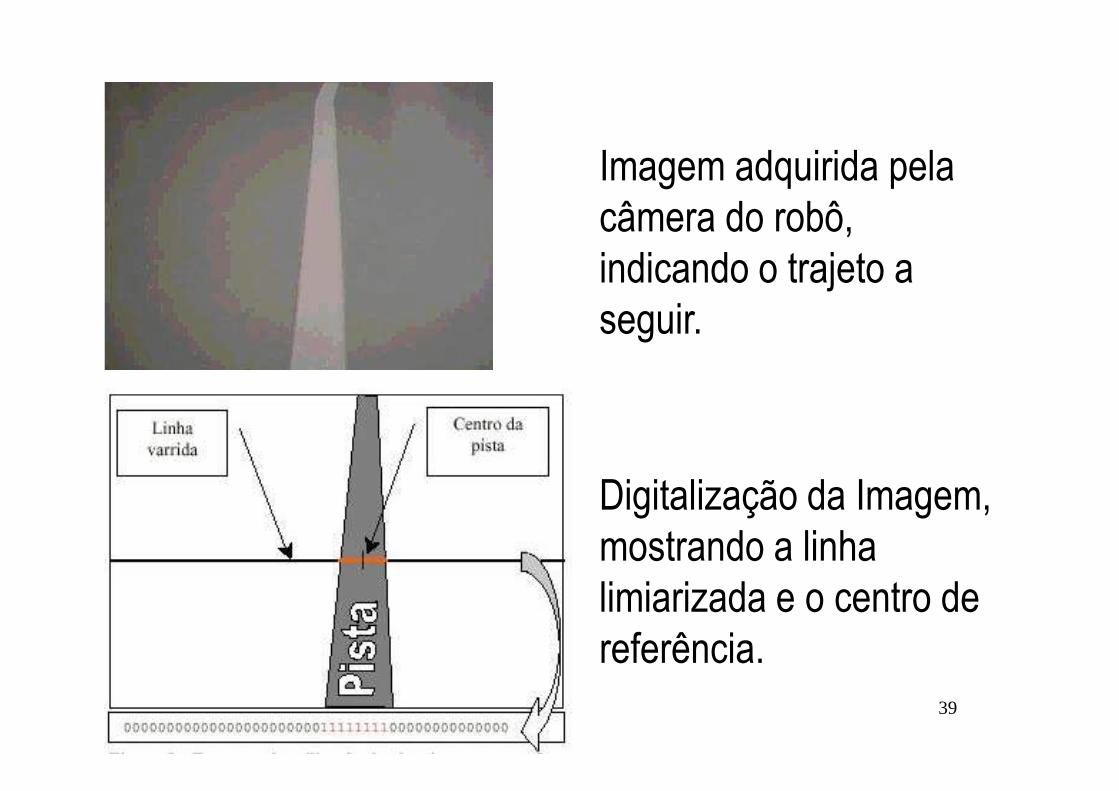
Imagem adquirida pela câmera do robô, indicando o trajeto a seguir.
39
Digitalização da Imagem, mostrando a linha limiarizada e o centro de referência.
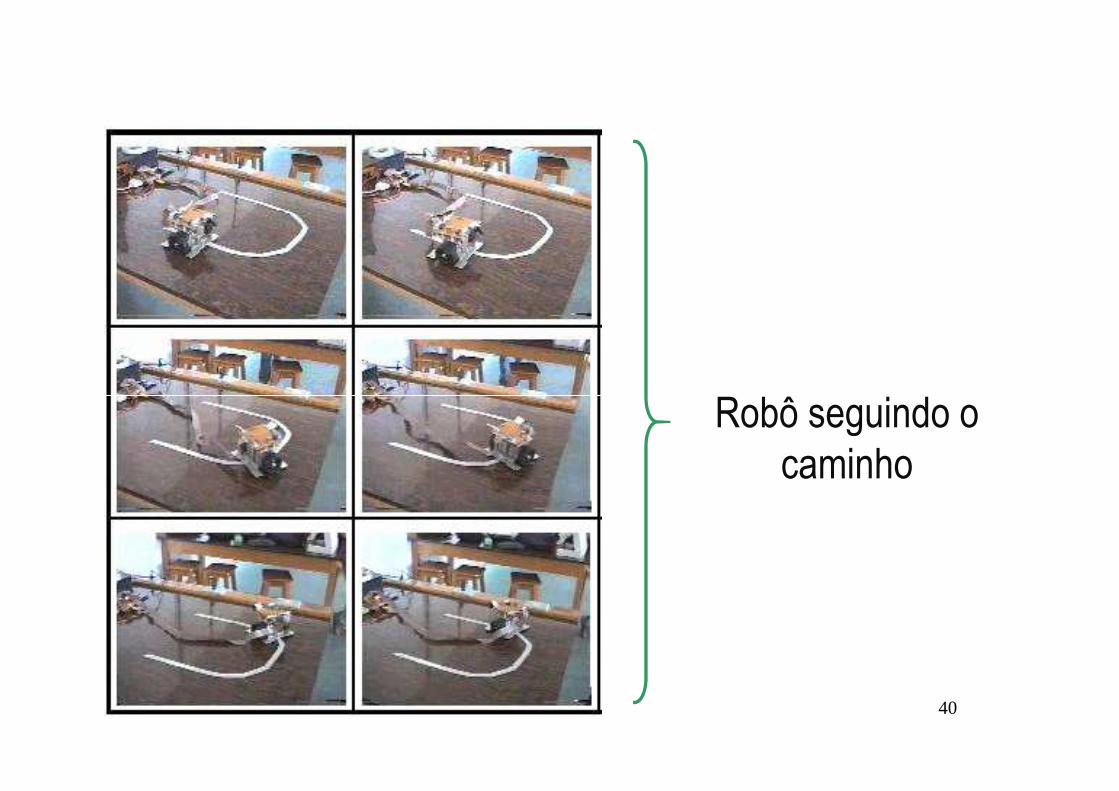
Robô seguindo o
40
Robô seguindo o caminho

Inspeção de Qualidade de CosturaCapas de vinil para encosto de cabeça são costurados com linhapreta. Um operador monta cada capa em um dispositivo de inflar.Uma chave é acionada pelo operador para disparar o sensor deinspeção. Costuras incompletas ou faltando registram uma contagembaixa de pixels pretos. O sensor responde, travando o dispositivo deinflar até um supervisor inspecionar a capa.Objetivo: Inspeção de qualidade de costura em capas de encosto
41
Objetivo: Inspeção de qualidade de costura em capas de encosto de cabeça de bancos automotivos.
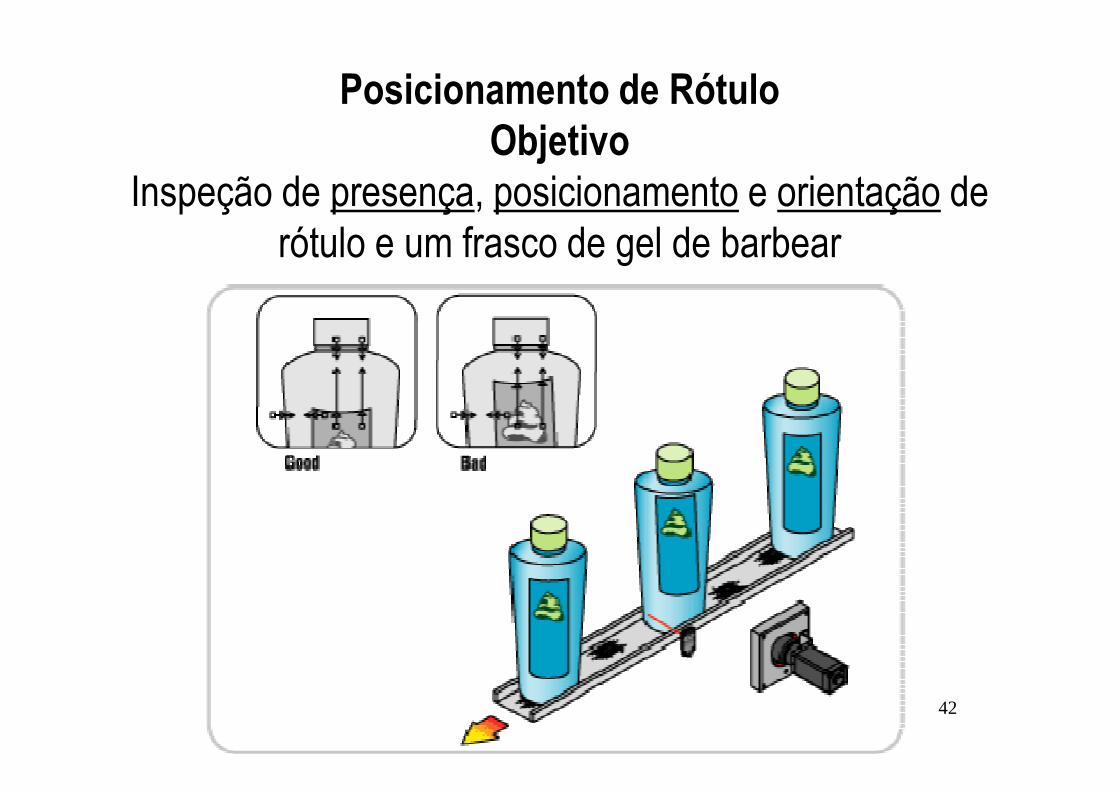
Posicionamento de Rótulo Objetivo
Inspeção de presença, posicionamento e orientação de rótulo e um frasco de gel de barbear
42

Posicionamento de RótuloÉ medida a distância do topo do rótulo até o topo do frasco em duasposições, verificando altura e alinhamento, e mede a distância de umlado do rótulo até o lado do frasco, verificando a posição lateral,dependendo do formato do frasco.
43

Aplicação e Detecção de Rótulo• Um rótulo com o logo da empresa é aplicado em umisqueiro descartável.•O rótulo é opaco sobre uma bobina transparente dematerial de fundo.•O isqueiro passa sob a bobina de rótulos e o rótulo éretirado do material de fundo e aplicado no isqueiro.
44
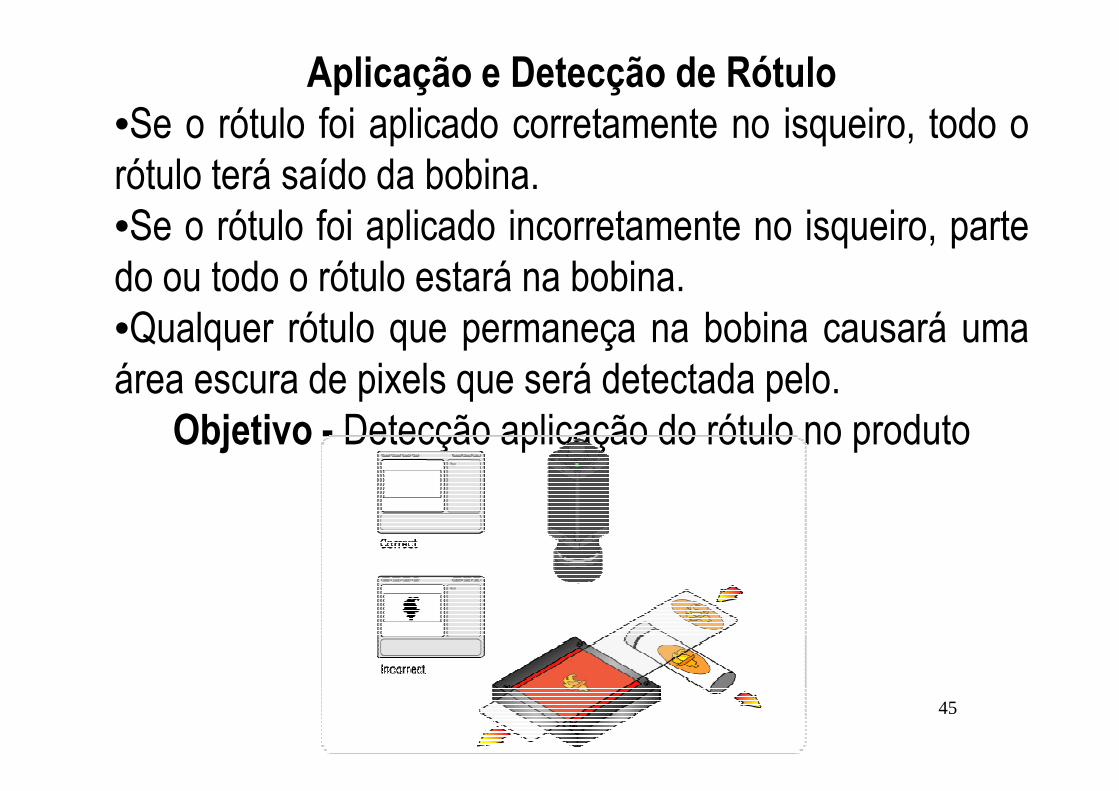
Aplicação e Detecção de Rótulo•Se o rótulo foi aplicado corretamente no isqueiro, todo orótulo terá saído da bobina.•Se o rótulo foi aplicado incorretamente no isqueiro, partedo ou todo o rótulo estará na bobina.•Qualquer rótulo que permaneça na bobina causará umaárea escura de pixels que será detectada pelo.
45
área escura de pixels que será detectada pelo.Objetivo - Detecção aplicação do rótulo no produto

46
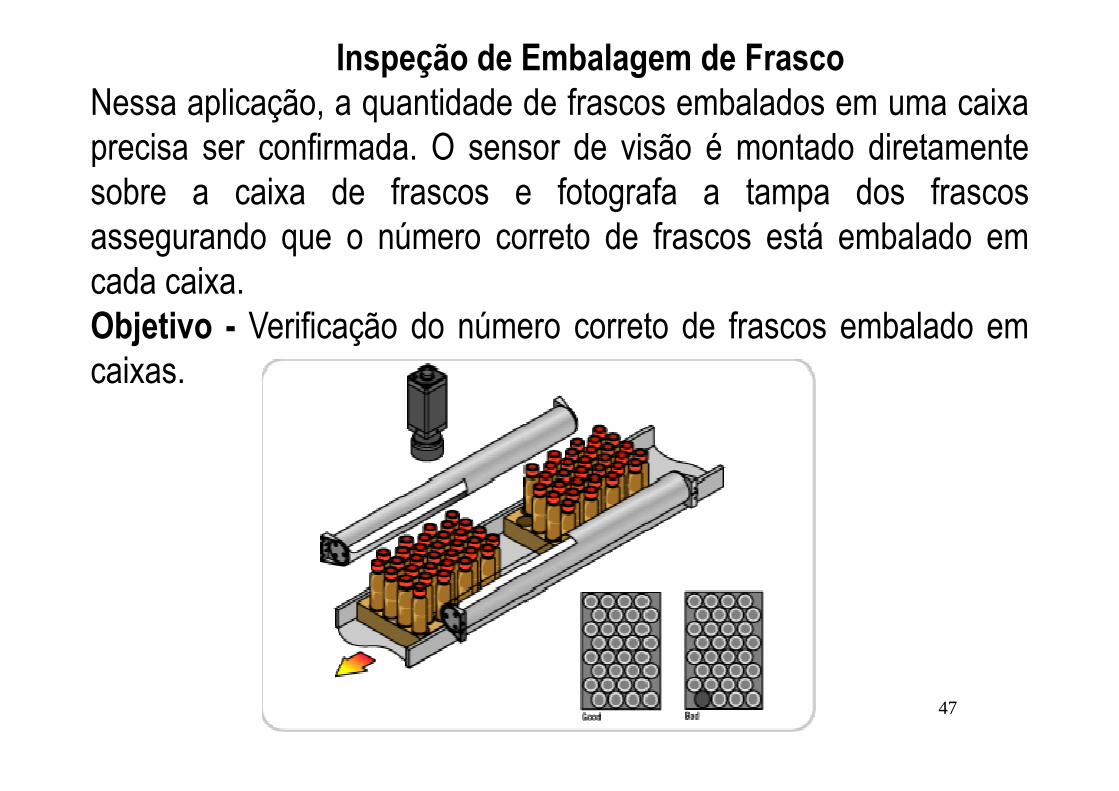
Inspeção de Embalagem de FrascoNessa aplicação, a quantidade de frascos embalados em uma caixaprecisa ser confirmada. O sensor de visão é montado diretamentesobre a caixa de frascos e fotografa a tampa dos frascosassegurando que o número correto de frascos está embalado emcada caixa.Objetivo - Verificação do número correto de frascos embalado emcaixas.
47

Inspeção de Frasco de Vidro O sensor assegura que a borda superior de cada frasco não
está lascado ou trincado por causa do bico metálico usado no processo de enchimento. Se algum dano for detectado, o sensor
rejeita a peça. Objetivo - Inspeção de danos em frascos de vidro em uma
estação automatizada de enchimento de líquido.
48
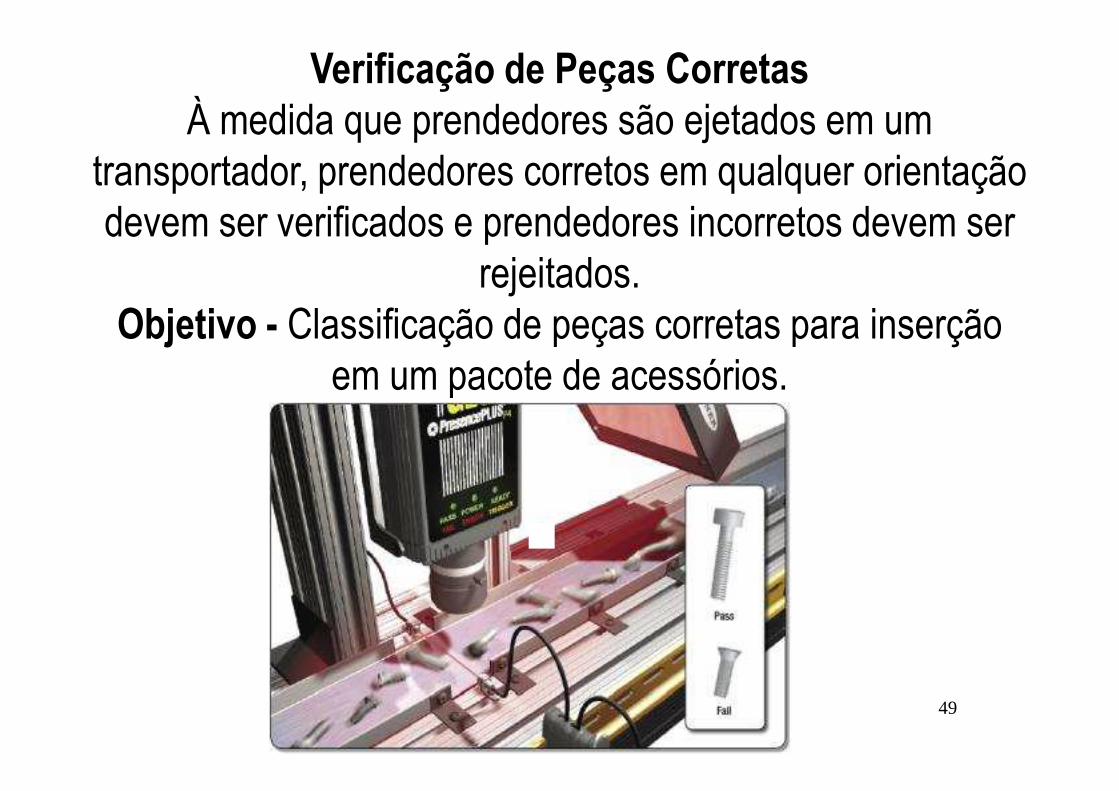
Verificação de Peças Corretas À medida que prendedores são ejetados em um
transportador, prendedores corretos em qualquer orientação devem ser verificados e prendedores incorretos devem ser
rejeitados. Objetivo - Classificação de peças corretas para inserção
em um pacote de acessórios.
49
em um pacote de acessórios.

Área de trabalho robóticaGuarda do ponto de carga e descarga de um robô.
Objetivo - O robô não pode trabalhar quando a cortina de luz é interrompida. O trabalho é reiniciado quando os feixes de luz forem
desbloqueados.
50





























