8/18/2019 Sath 106
1/2
Réglage d'état
Jean-Marc Allenbach 10–31 040212
10.6 OBSERVATEURS
10.6.1 ObservabilitéOn a particulièrement besoin de la notion
d'observabilité lorsqu'une des grandeurs
d'état n'est pas facilement mesurable et qu'il faut la
reconstituer à partir d'autres mesures (§10.6.2). Un système est
dit observable si on peut déterminer de manière univoque son état
dedépart xs(t 0) en mesurant sa sortie y(t ) lorsqu'il est soumis à
une commande u(t ) pendant untemps fini. Un système défini par son
modèle d'état A, b , cT est observable si sa matriced'observabilité
Q o est régulière.
Q
c
c A
c A
o
T
T
T n 1
=
−
M (10.132)
On relève une forte ressemblance structurelle de Q o avec la
matrice de calcul E (10.112) utilisée pour dimensionner le
régulateur.
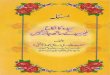
On illustre la définition par une exemple de système du deuxième
ordre.
Fig. 10.124 Exemple de système .
Le système d'équation découle du schéma fonctionnel (fig.
10.124).
s X U X
s X U X
Y X X
1 1
2 2
1 2
3
3
= −= −= +
(10.133)
On en tire aisément les matrices dont on a besoin pour calculer
Q o.
[ ]A cs sT= − − =3 0
0 31 1 (10.134)
On calcule la matrice d'observabilité.
Qc
c AosT
sT
s
=
= − −1 1
3 3 (10.135)
On constate que la matrice contient deux colonnes identiques,
son déterminant estdonc nul et le système n'est pas
commandable.
Pour un système multivariable, il faut que le rang de la matrice
Q o soit égal à n.
y 1
3 s +
1
3 s +
u x1
x2
8/18/2019 Sath 106
2/2
Réglage d'état
Jean-Marc Allenbach 10–32 040212
10.6.2 Principe Un observateur d'état est un modèle mathématique
du processus physique. Il
fonctionne en temps réel. On a d'abord identifié le système pour
établir ses matrices d'état. Enappliquant à ce modèle d'état le
même signal de commande u que le système réel, on calculeun vecteur
d'état observé $x s dont les composantes connaissent la même
évolution dynamiqueque celles du système réel. On peut donc
utiliser la mesure du vecteur observé pour obtenirl'information sur
le système lorsque ses grandeurs ne sont pas mesurables.
&$ $x A x b= + u (10.136)$ $ y u= +c x dT (10.137)
Les éléments des matrices d'état ne sont toutefois pas établies
de manière exacte. Onajoute donc à l'observateur une correction par
une matrice k o dont l'entrée est l'cartd'observation eo.
e y yo = − $
(10.138)
L'équation (10.136) est modifiée en conséquence.
&$ $x A x b k = + +u eo o (10.139)
Fig. 10.125 Observateur d'état .
On exige que le comportement dynamique de l'observateur soit
plus rapide que celuidu processus réel, de manière à ce que
l'erreur d'observation ~x soit aussi faible que possible,même dans
les phénomènes transitoires.
~ $x x x= − (10.140)
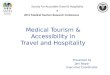
Il n'est pas nécessaire de disposer explicitement du signal de
sortie observé, puisqu'ilest mesurable. On peut donc modifier le
diagramme structurel de l'observateur.
Fig. 10.126 Observateur d'état simplifié .
&$ $x A x b k = + +o ou y (10.141)
A A k co oT= − (10.142)
u b
k o
A
cT 1/s $ y
$x
– u b
k o
A
cT 1/s $ y
$x
–
u b
k o
Ao
1/s
$x