-
8/18/2019 Sath 114
1/5
Asservissements digitaux
Jean-Marc Allenbach 11–25 22-03-2005
11.4 STABILITÉ
11.4.1 Définition
Lorsqu'on a un système échantillonné bouclé, il est nécessaire
de pouvoir évaluer sa stabilité,
comme on sait le faire pour un système continu. On va donc
partir de ce qu'on connaît en continu
pour le traduire en échantillonné.
Fig. 11.31 Circuit de réglage échantillonné.
On peut déterminer la stabilité d'un système continu en boucle
fermée par l'étude de sa
fonction de transfert Gf ( s). On a vu au chapitre 6
qu'il est nécessaire que tous les pôles pi de
Gf ( s)
soient à partie réelle négative.
p ji i i iavec= ±
-
8/18/2019 Sath 114
2/5
-
8/18/2019 Sath 114
3/5
Asservissements digitaux
Jean-Marc Allenbach 11–27 22-03-2005
Dans la figure 11.35, le tracé a correspond à un système
stable en boucle fermée, le tracé b
à un système en limite de stabilité et le tracé c à un
système instable. Un système est stable si, en
parcourant la réponse harmonique pour des pulsations de 0
à π, le point «–1» est laissé sur la
gauche.
Comme en continu, la marge de phase permettra de déterminer le
dépassement D1 sur la
réponse indicielle.
ϕ
ϕ
ϕ
M
M
M
= ° ⇒ ≅
= ° ⇒ ≅
≥ ° ⇒ ≅
45 16%
63 5%
76 0%
1
1
1
D
D
D
(11.90)
On prendra encore garde à respecter une marge de gain
AM assez confortable. (on rappelle
qu'il s'agit du nombre par lequel il faut multiplier
G0 pour amener le système en limite de stabilité).
AM > 2 5... (11.91)
Critère de Bode: par extension, on peut aussi appliquer ce
critère en jouant sur le rapportde pulsations entre celle définie
par un module unité de la réponse harmonique en boucle ouverte
et
celle définie par la cassure entre la pente de –1 et celle de
–2.
On désire – par rapport à la stabilité définie (§ 11.4.1) –
pouvoir être plus précis sur le
comportement dynamique.
Critère d'Evans: Dans le plan s, on a défini des marges de
stabilité absolue et relative. Ils'agit de les traduire dans le
plan z .
Le temps de réponse maximal accepté impose que tous les pôles du
système asservi se
trouvent à gauche d'une verticale définie par – ρi.
p j yiy = − ±ρ (11.92)
Dans le plan z, cela correspond à un cercle de rayon e
T −ρi centré à l'origine.
z e eT jyT yi= − ±ρ (11.93)
Ces deux limites sont dessinées en traitillé sur les figures
11.36 et 11.37. Les tronçons
renforcés en trait gras (bleu) sont correspondantes dans les
plan s et z .
Un dépassement de 5 % sur la réponse indicielle correspond à une
marge de stabilité relative
de ψ = °45 définissant deux droites affines
dans le plan s.
p jx = − ± (11.94)
-
8/18/2019 Sath 114
4/5
Asservissements digitaux
Jean-Marc Allenbach 11–28 22-03-2005
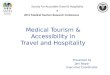
Dans le plan z , cela correspond à une cardioïde, ou plutôt
deux spirales symétriques par
rapport à l’axe réel (Figure 11.A.9).
z e xT jx = − ±( )1 (11.95)
Ces deux limites sont dessinées en trait mixte sur la figure
11.36. Les parties renforcées en trait gras
(rouge) sont correspondantes dans les plan s et
z .
Fig. 11.36 Critère d'Evans dans les plans
s et z pour un comportement optimal.
Un dépassement de 16 % sur la réponse indicielle correspond à
une marge de stabilité
relative de ψ = °30 définissant deux droites
affines dans le plan s.
z x
j xx = − ±3
(11.96)
Dans le plan z , cela correspond à une cardioïde.
z e xT j
x =− ±( )
1
3 (11.97)
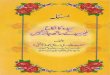
Ces deux limites sont dessinées en trait gras sur la figure
11.37.
Tous les pôles du système devront donc se trouver dans la zone
tramée (jaune) limitée par z x
et z y pour respecter les exigences de temps de
réponse et de dépassement prescrites par le cahier
des charges.
-1 -0.5 0 0.5 1 -1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Z
e – ρcliT
-2 -1.5 -1 -0.5 0
0.5 -1.5
-1
-0.5
0
0.5
1
1.5
jπ/T
S
Ψcli
– ρcli
-
8/18/2019 Sath 114
5/5
Asservissements digitaux
Jean-Marc Allenbach 11–29 22-03-2005
Fig. 11.37 Critère d'Evans dans les plans
s et z pour un comportement unipériodique.
Pour éviter tout dépassement, les pôles continus doivent être
réels.
px = − (11.98)
Dans le plan, cela correspond à des nombres réels positifs
inférieurs à 1.
z e xT x = − (11.99)
Plus généralement, pour un dépassement maximal 0 % <
D1max < 100 %, on a aussi des
droites affines.
p D
j xx = − ±(ln[ max]
)1
π (11.100)
z e xT
D j
x =− ±(
ln)
max1
π (11.101)
-1 -0.5 0 0.5 1 -1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Z
-2 -1.5 -1 -0.5 0
0.5 -1.5
-1
-0.5
0
0.5
1
1.5
jπ/T
S
– ρcli
Ψcli