Embed Size (px)
Citation preview

323978-1-4244-4478-6/09/$25.00 ©2009 IEEE
5th International Symposium on Applied Computational Intelligence and Informatics • May 28–29, 2009 – Timişoara, Romania
Scalable Metric for Coverage Evaluation in Video-based Wireless Sensor Networks
Dan Pescaru, Codruta Istin, Florica Naghiu, Madalin Gavrilescu, Daniel Curiac
Figure 1. Video sensor field of view (FOV) 2D projection
(a) (b)
Figure 2. Redundancy example on (a) random deployment and (b) on systematic deployment
Scalable Metric for Coverage Evaluation in Video-based Wireless Sensor Networks
Dan Pescaru*, Codruta Istin*, Florica Naghiu*, Madalin Gavrilescu* and Daniel Curiac* * “Politehnica” University of Timisoara, Faculty of Automation and Computers, Timisoara, Romania
e-mail: [email protected]
Abstract— One of the most important aspects of wireless sensor networks applications is the network lifetime. A possibility of prolonging lifetime is to turn off some sensors, especially in dense deployed networks with high redundancy. However, to keep the application effectiveness a certain amount of coverage is needed. The coverage is usually quantized by various metrics. In this paper we propose a scalable metric to evaluate in a distributive manner the coverage in dense deployed video-based wireless sensor networks. It allows qualifying the coverage efficiency especially in case of surveillance applications. Metric definition is based on video-sensors field-of-view and it relays on network clustering infrastructure. Simulation results are presented to demonstrate this approach.
I. INTRODUCTION The importance of using Wireless Sensor Networks
(WSN) in real world applications significantly increases during last years. They are characterized by dense deployment of small sensor nodes, which transmits information about sensed events to a various number of central sinks. The sensor nodes operate until their batteries are discharged. Accessing a sensor node either for replacement or for battery recharge may be impossible due to nature of the deployment environment. Therefore, since the power available in each node is limited, energy efficiency and extension of network lifetime are major concerns [1].
Due to spatial overlapped between sensor area related to observed events, it may not be necessary for every sensor node to transmit its data. Therefore, these nodes could be turn off to prolong the network lifetime while connectivity is not affected [2]. However, a certain amount of active nodes should exist to ensure a desired level of coverage at all times.
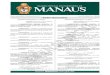
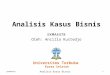
In a WSN, a sensor covers a target if the target is in the sensing range of the sensor. In case of a video-based WSN the sensors are unidirectional and the sensing range has to be correlated with the cameras’ Filed of View (FOV) [3]. Due to the limited resolution and distortions of the lenses, cameras have a bounded depth of field. Indeed, the objects that are too far away from the optical center may not be observed. If the cameras are placed on the same horizontal plane all FOVs are 2D projections of the 3D volume of viewing on the planar surface. In our work we assume that all cameras are directed toward this plane and the FOV of every camera intersects with it as depicted in Fig. 1. Considering that, the sensors redundancy is denoted by superposition percentage between all FOVs projections. Sensor nodes can be placed on predetermined systematic positions or randomly deployed. Fig. 2 shows examples for both situations implying redundancy. There are several
algorithms that use this redundancy to save network energy.
Ref. [4] presents a heuristic deployment algorithm that selects mutually exclusive sets of sensor nodes, where the members of each of those sets together completely cover the monitored area.
In [5] certain redundant cameras are turned off until a new operation situation arises that requires the cameras to be on. The goal is to provide comprehensive image acquisition in the presence of dynamic disturbances, which obstruct the field of view of the cameras.
The authors of [6] propose a coverage-preserving node-scheduling scheme, which can reduce energy consumption by turning off some redundant nodes. A basic model for coverage-based off-duty eligibility rule and then extend it to several different scenarios is presented. The eligibility rule guarantees preservation of sensing coverage. The back-off scheme is designed for prolonging coverage preservation in a real-time environment by avoiding blind points.
A key issue of all these methods is to preserve a certain level of coverage when redundant nodes are switched off. The coverage is generally defined as how well the sensors observe a physical space.
The semantics of the coverage can be expressed using a variety of metrics [7, 8]. However, these metrics are computed on the central sink and need accurate information about all network nodes localization.

Dan Pescaru, Codruta Istin, Florica Naghiu, Madalin Gavrilescu, Daniel Curiac • Scalable Metric for Coverage Evaluation in Video-based Wireless Sensor Networks
324
Moreover, most of them are based on algorithms that do not scale well considering WSN composed of hundreds to thousands of nodes.
In this paper we propose a different approach based on distributed metric computation. It relies on clustering infrastructure specific for several known routing algorithms. The main issue is to develop an algorithm that requires very low resources in term of memory and computation power. Indeed, the node hardware resources are powered by low voltage supplies clocked below 1GHz and the storage capacity varies between hundreds kilobytes and few megabytes [9].
The rest of the paper is organized as following. Section two is an overview on coverage metrics. Section three presents some clustering approaches and discuses the benefits of them from our perspective. Next section describes the proposed metric. Section five presents our experiments and analyses the results. Conclusions and future work are presented at the end.
II. COVERAGE PROBLEM Coverage is a key issue in all surveillance applications.
The aim of coverage metrics is to reveal the quality of sensing that a particular sensor network provides. The coverage problem has been studied extensively in recent years. Some solutions focus on pure coverage problems to characterize the coverage of wireless ad hoc sensor networks. Other solutions integrate network connectivity into coverage problems. However, most of existing solutions are design for isotropic sensors. Video-based sensor networks have several distinctive features that make them different from traditional wireless sensor networks. Many proposed coverage metrics are based on physical distance between the target and the sensor. In case of video camera this distance is relevant only if the target trajectory intersect the FOV.
In [10] the authors proposed a probe-based algorithm named PEAS. It lets each node probe to maintain a desired working node density while avoiding the overhead of keeping per neighbor state. PEAS handle unpredictable node failures using a randomized wakeup algorithm. The main achievement is keeping the working node density approximately constant independent of the node deployment density. As a result, it can prolong the overall system lifetime proportionally to the total number of deployed nodes. While the algorithm address both coverage and connectivity, it does not provide analytical guarantees on the degree of coverage. Even if the algorithm scales well it is design based on sensing range of isotropic sensors and could not be applied when video sensors are considered.
Reference [11] presents a set of centralized and distributed algorithms to solve the problem of selecting a minimum energy-cost connected sensor cover, when each sensor node can vary its sensing and transmission radius. One of the centralized algorithms is shown to perform within an O(log n) factor of the optimal solution, where n is the size of the network. In conjunction with it a localized algorithm based on Voronoi diagrams is shown to perform very close to it while prove better
communication-efficiency. Moreover, there are several differences between our assumptions and their conditions. Mainly they refer only to omni-directional sensors. Even more, the condition that sensors can vary the sensing range could not be applied in case of video sensors. Also the distributed algorithm is based on local Voronoi cell and could not express the quality of global network coverage.
The work in [12] is focused on maintaining the sensing coverage and the network connectivity. The network must be able to configure itself to any feasible degrees of coverage and connectivity in order to support different applications and environments with diverse requirements. The authors provide a comprehensive geometric analysis of the relationship between coverage and connectivity. However, the analysis is based on a very simple coverage metric. A point p is considered covered by a node v if their Euclidian distance is less than the sensing range of v, Rs: |pv| < Rs. This metrics does not ensure a fine grade perception on global coverage and works only for isotropic sensors.
More sophisticated coverage model is used to address exposure-based coverage problems in [13]. The authors define exposure as a measure of how well an object, moving on an arbitrary path, can be observed by the sensor network. Using exposure they define a maximal breach path as a path where its closest distance to any of the sensors is as large as possible. Also, the maximal support path is defined as a path where its farthest distance from the closest sensors is minimized. Then, the maximal breach path and maximal support path in a sensor network are computed using Voronoi diagram and Delaunay triangulation techniques.
Adaptation of maximal breach path for anisotropic sensors is done in [14]. In this paper authors present an algorithm for computing the worst-case breach coverage designed for directional “field-of-view” sensors. Breach represents the worst-case coverage by assuming that in general, targets are more likely to be detected and observed when they are closer to the sensors and in them FOVs. The complexity of the algorithm is estimated as O(n2 log range) in the worst case, where range is the difference between highest and lowest weighted edges in the search graph. The authors point out that the complexity of the algorithm is dominated by the Voronoi diagram generation and FOV intersection procedures which both have large constant factors in their complexity. As this metric is close to our goal we consider it as a starting point for the work presented in this paper.
III. CLUSTERING INFRASTRUCTURE Achieving connectivity, addressing and routing
structures in an ad-hoc self-organizing network may involve the decomposition of the network into connected clusters of bounded size. Moreover, clustering is an effective self-organization technique that can prolong the network lifetime. In most clustering algorithms, a set of cluster heads is selected from sensor nodes. The remaining nodes register themselves as members of one

5th International Symposium on Applied Computational Intelligence and Informatics • May 28–29, 2009 – Timişoara, Romania
325
Moreover, most of them are based on algorithms that do not scale well considering WSN composed of hundreds to thousands of nodes.
In this paper we propose a different approach based on distributed metric computation. It relies on clustering infrastructure specific for several known routing algorithms. The main issue is to develop an algorithm that requires very low resources in term of memory and computation power. Indeed, the node hardware resources are powered by low voltage supplies clocked below 1GHz and the storage capacity varies between hundreds kilobytes and few megabytes [9].
The rest of the paper is organized as following. Section two is an overview on coverage metrics. Section three presents some clustering approaches and discuses the benefits of them from our perspective. Next section describes the proposed metric. Section five presents our experiments and analyses the results. Conclusions and future work are presented at the end.
II. COVERAGE PROBLEM Coverage is a key issue in all surveillance applications.
The aim of coverage metrics is to reveal the quality of sensing that a particular sensor network provides. The coverage problem has been studied extensively in recent years. Some solutions focus on pure coverage problems to characterize the coverage of wireless ad hoc sensor networks. Other solutions integrate network connectivity into coverage problems. However, most of existing solutions are design for isotropic sensors. Video-based sensor networks have several distinctive features that make them different from traditional wireless sensor networks. Many proposed coverage metrics are based on physical distance between the target and the sensor. In case of video camera this distance is relevant only if the target trajectory intersect the FOV.
In [10] the authors proposed a probe-based algorithm named PEAS. It lets each node probe to maintain a desired working node density while avoiding the overhead of keeping per neighbor state. PEAS handle unpredictable node failures using a randomized wakeup algorithm. The main achievement is keeping the working node density approximately constant independent of the node deployment density. As a result, it can prolong the overall system lifetime proportionally to the total number of deployed nodes. While the algorithm address both coverage and connectivity, it does not provide analytical guarantees on the degree of coverage. Even if the algorithm scales well it is design based on sensing range of isotropic sensors and could not be applied when video sensors are considered.
Reference [11] presents a set of centralized and distributed algorithms to solve the problem of selecting a minimum energy-cost connected sensor cover, when each sensor node can vary its sensing and transmission radius. One of the centralized algorithms is shown to perform within an O(log n) factor of the optimal solution, where n is the size of the network. In conjunction with it a localized algorithm based on Voronoi diagrams is shown to perform very close to it while prove better
communication-efficiency. Moreover, there are several differences between our assumptions and their conditions. Mainly they refer only to omni-directional sensors. Even more, the condition that sensors can vary the sensing range could not be applied in case of video sensors. Also the distributed algorithm is based on local Voronoi cell and could not express the quality of global network coverage.
The work in [12] is focused on maintaining the sensing coverage and the network connectivity. The network must be able to configure itself to any feasible degrees of coverage and connectivity in order to support different applications and environments with diverse requirements. The authors provide a comprehensive geometric analysis of the relationship between coverage and connectivity. However, the analysis is based on a very simple coverage metric. A point p is considered covered by a node v if their Euclidian distance is less than the sensing range of v, Rs: |pv| < Rs. This metrics does not ensure a fine grade perception on global coverage and works only for isotropic sensors.
More sophisticated coverage model is used to address exposure-based coverage problems in [13]. The authors define exposure as a measure of how well an object, moving on an arbitrary path, can be observed by the sensor network. Using exposure they define a maximal breach path as a path where its closest distance to any of the sensors is as large as possible. Also, the maximal support path is defined as a path where its farthest distance from the closest sensors is minimized. Then, the maximal breach path and maximal support path in a sensor network are computed using Voronoi diagram and Delaunay triangulation techniques.
Adaptation of maximal breach path for anisotropic sensors is done in [14]. In this paper authors present an algorithm for computing the worst-case breach coverage designed for directional “field-of-view” sensors. Breach represents the worst-case coverage by assuming that in general, targets are more likely to be detected and observed when they are closer to the sensors and in them FOVs. The complexity of the algorithm is estimated as O(n2 log range) in the worst case, where range is the difference between highest and lowest weighted edges in the search graph. The authors point out that the complexity of the algorithm is dominated by the Voronoi diagram generation and FOV intersection procedures which both have large constant factors in their complexity. As this metric is close to our goal we consider it as a starting point for the work presented in this paper.
III. CLUSTERING INFRASTRUCTURE Achieving connectivity, addressing and routing
structures in an ad-hoc self-organizing network may involve the decomposition of the network into connected clusters of bounded size. Moreover, clustering is an effective self-organization technique that can prolong the network lifetime. In most clustering algorithms, a set of cluster heads is selected from sensor nodes. The remaining nodes register themselves as members of one
Figure 3. Example of a network-clustering infrastructure
or more clusters. The cluster heads are responsible for communicating with its registered cluster nodes and with other cluster heads. As concerning our algorithm we try to identify a clustering technique that ensure a limited small number of nodes per cluster. A general image of a clustering infrastructure is presented in Fig. 3.
In [15] is presented an approach for message-efficient clustering, in which nodes allocate local growth budgets to neighbors. The main goal is to reduce the number of messages exchanged and to allow the cluster to grow based only on local decisions. The authors design two algorithms supporting this approach. The first algorithm called Rapid produces clusters of bounded size. It uses few messages, but has a poor worst-case analytical performance in terms of the cluster size produced. The second algorithm, which is recursive in nature, is called Persistent since it persistently tries to produce a cluster of the specified bound if possible. This algorithm significantly improves the worst-case behavior.
Reference [16] shows a scheme for self-organization management protocols and proposes a cluster-based routing protocol that integrates the inter-cluster on-demand routing and the intra-cluster table-driven routing. The goal of these protocols is to provide a low cost communications between clusters. To form the cluster hierarchy, the number of headers is decided by a 20/80 rule. Each cluster has the minimum hop count and maintains the balance of cluster headers in the area. Both of node density and the number of headers can be varied to improve cover loss. The routing protocol uses a table-driven routing mechanism to construct the intra-cluster routing and builds the inter-cluster routing by exchanging the relation of clusters on demand. Hence, this protocol can reduce the amount of packets flooding throughout entire network and improve the routing efficiency in various applications.
A hierarchic approach of node groups’ formation is presented in [17]. The process is divided in several phases. It begins with small basic groups restricted to a size of 8 members. Every node should belong to exactly one basic group. Each node in a group is allocated a 3-bit address and every node maintains the distance and the next hop for reaching every other node in the group. The following phases address group merging and group reorganization. For our point of view the basic groups could form a basis for metric calculation.
In [18] is proposed an actor positioning and clustering algorithm. It employs actors as cluster-heads and places them to minimize the data gathering and acting process times. To define clusters it determines the k-hop
independent dominating set of the underlying sensor network. Since the algorithm tries to minimize the number of actors employed and thus the number of clusters, it does not concentrates much on cluster size and could not be considered in presented work.
Besides main objectives of clustering techniques such as minimization of the total transmission power or supporting data aggregation, many of clustering algorithms ensure reasonable dimension of cluster sizes. This is usually related with limited inter-cluster hop count or data aggregation constraints. Therefore we can conclude that they are suitable to sustain our implementation.
IV. DISTRIBUTED METRIC FOR VIDEO-BASED WSN The quality of the sensing coverage of a WSN used in a
surveillance application could be expressed by probability of intrusion detection. In case of a video sensor the probability of detection of a target crossing its FOV decreases with distance. As already shown this is influenced by the limited sensor resolution and the distortion of the lens.
In practice a target could not be detected if it has a sub-pixel representation. Indeed, in this case is hard to distinguish between noise and the target image. Considering that, the distance from any sensor to the closest observed point that an agent traveling the network will pass represents a good metric. This metric was defined in [14] as FOV maximal breach path. The limitation of the algorithm presented there resides in demand of centralized computation. This is not very scalable as its performance is near to O(n2 log n). Also it could not be used to implement distributed algorithms for energy preservation if we consider a dynamic environment or mobile nodes. Possibility of distribution of the algorithm is limited due several factors. One of it is the necessity of a general view of network topology. Another aspect refers to high demand in terms of computational power and storage capacity, which are very limited at the level of a sensor node.
Therefore we propose an alternative involving a light metric that allows a distributed approach. The goal of this metric is to approximate the FOV maximal breach path while resources involved in its computation are significantly decreased.
This resulting path will use intensively FOV borders trying to avoid crossing FOV of any sensor. When this is not possible a direct path to the next border segment will be selected. If a segment that belongs or not to a border traverse a FOV of a sensor it is augmented with a value representing the shortest distance between any segment-point and the sensor. This distance describes the grade of the segment. If the segment traverses more than one FOV the lowest grade will be considered. A segment that not traverses any FOV is augmented with a ∞ grade denoting the impossibility of detection. All these segments form a FOV traversing graph GFOV. This is very close to the algorithm that calculates the FOV maximal breach path without considering Voronoi edges but we add a greedy part for selecting best segment that link two FOV edges.
We define a FOV closest path as a path that traverses the network area between two points A and B tacking the minimum grade segments from GFOV. Calculation of this

Dan Pescaru, Codruta Istin, Florica Naghiu, Madalin Gavrilescu, Daniel Curiac • Scalable Metric for Coverage Evaluation in Video-based Wireless Sensor Networks
326
Figure 4. Example of FOV closest path in a five nodes network
path starts with the closest GFOV segment to the starting point. Each step involves selection of a new segment with the minimum grade. This new segment has to be selected from the list of segments having at list one extremity belonging to the subspace delimited by current point and the destination point. Fig. 4 depicts the FOV closest path in a five-sensor nodes network. All segments from GFOV are accompanied by the corresponding grades (∞ grade is denoted by the value 1000).
Fig. 5 presents a pseudo-code algorithm that calculates the FOV closest path.
This path is calculated for each cluster of the network and could be used by coverage preserving algorithms considering dynamic conditions.
The algorithm avoids computation of Voronoi graph that involves O(n2) floating point operations. It also requires about a half memory compared with maximal breach path algorithm.
We use this metric in conjunction with the algorithm that recovers FOV loss in presence of dynamic obstacles [5]. Redundant cameras with their FOV covered by other cameras are turned off to save resources, like energy and communication bandwidth. In presence of a dynamic obstacle the algorithm identifies an optimized set of redundant cameras that must be turned on to cover the FOV loss. The metric defined here is used to compute the percentage when a camera has to be turned off. Indeed, the camera is turned off until its FOV rises above a limit that was set empirical.
V. EXPERIMENTAL RESULTS The proposed method was implemented as a Java
program and simulated on a PC desktop computer. Experiments studied the accuracy of defined metric compared with maximum breach path for different cluster architectures. All cluster nodes are identical and integrates a video camera with viewing angle of 30° and efficient FOV range set to 70 m. Different sized clusters were deployed on the same surface on 100x100 m resulting in various node densities. To avoid false results we generate 50 different random deployments for each cluster and consider the mean value for all measurements.
Figures 6 and 7 illustrate closest path compared with maximal breach path on a 12 nodes cluster.
Figure 6. FOV closest path on 12 nodes network cluster
Figure 7. FOV maximal breach path on 12 nodes network cluster
First we study how the cluster size influences the overall performance compared with the maximal breach path algorithm. The results are presented in fig. 8. It shows that the algorithm performs well in most situations. In the worst deployment case denoted by minimal rank, the values are closed. The maximum difference was not higher by 23%. Even if for large sensor groups results are hard to be predicted we limit our experiments to 25 nodes cluster based on mean cluster size of various studied clustering algorithms.
Figure 5. Algorithm for FOV closest path computation
(1) compute the GFOV; (2) for( each segment in GFOV ) (3) calculate the segment grade; (4) compute the current_segment as the
segment that link point A with the nearest segment from GFOV
(5) while ( current segment does not intersect B border)
(6) select the minimum grade segment from GFOV near the current_segment that belongs to sub-plan delimited by the current segment and B
(7) add a segment that link current segment with the point B

5th International Symposium on Applied Computational Intelligence and Informatics • May 28–29, 2009 – Timişoara, Romania
327
Figure 4. Example of FOV closest path in a five nodes network
path starts with the closest GFOV segment to the starting point. Each step involves selection of a new segment with the minimum grade. This new segment has to be selected from the list of segments having at list one extremity belonging to the subspace delimited by current point and the destination point. Fig. 4 depicts the FOV closest path in a five-sensor nodes network. All segments from GFOV are accompanied by the corresponding grades (∞ grade is denoted by the value 1000).
Fig. 5 presents a pseudo-code algorithm that calculates the FOV closest path.
This path is calculated for each cluster of the network and could be used by coverage preserving algorithms considering dynamic conditions.
The algorithm avoids computation of Voronoi graph that involves O(n2) floating point operations. It also requires about a half memory compared with maximal breach path algorithm.
We use this metric in conjunction with the algorithm that recovers FOV loss in presence of dynamic obstacles [5]. Redundant cameras with their FOV covered by other cameras are turned off to save resources, like energy and communication bandwidth. In presence of a dynamic obstacle the algorithm identifies an optimized set of redundant cameras that must be turned on to cover the FOV loss. The metric defined here is used to compute the percentage when a camera has to be turned off. Indeed, the camera is turned off until its FOV rises above a limit that was set empirical.
V. EXPERIMENTAL RESULTS The proposed method was implemented as a Java
program and simulated on a PC desktop computer. Experiments studied the accuracy of defined metric compared with maximum breach path for different cluster architectures. All cluster nodes are identical and integrates a video camera with viewing angle of 30° and efficient FOV range set to 70 m. Different sized clusters were deployed on the same surface on 100x100 m resulting in various node densities. To avoid false results we generate 50 different random deployments for each cluster and consider the mean value for all measurements.
Figures 6 and 7 illustrate closest path compared with maximal breach path on a 12 nodes cluster.
Figure 6. FOV closest path on 12 nodes network cluster
Figure 7. FOV maximal breach path on 12 nodes network cluster
First we study how the cluster size influences the overall performance compared with the maximal breach path algorithm. The results are presented in fig. 8. It shows that the algorithm performs well in most situations. In the worst deployment case denoted by minimal rank, the values are closed. The maximum difference was not higher by 23%. Even if for large sensor groups results are hard to be predicted we limit our experiments to 25 nodes cluster based on mean cluster size of various studied clustering algorithms.
Figure 5. Algorithm for FOV closest path computation
(1) compute the GFOV; (2) for( each segment in GFOV ) (3) calculate the segment grade; (4) compute the current_segment as the
segment that link point A with the nearest segment from GFOV
(5) while ( current segment does not intersect B border)
(6) select the minimum grade segment from GFOV near the current_segment that belongs to sub-plan delimited by the current segment and B
(7) add a segment that link current segment with the point B
Figure 8. Variation of minimal rank for closest path and maximal
breach algorithms
Another investigation refers to the execution time. As presented by fig. 9 the algorithm is efficient in terms of execution time on a PC platform. We expect an even higher difference on sensor node implementation where limited resources are available.
Figure 9. Variation of the execution time for closest path and maximal
breach algorithms
As shown by these results the algorithm is very attractive for distributed implementation at the level of network clusters than FOV maximal breach path wile the performance denoted by minimal rank of the path is reasonable close for small to medium size clusters.
VI. CONCLUSIONS This paper proposes a scalable metric to evaluate in a
distributive manner the coverage in dense deployed video-based wireless sensor networks. It allows qualifying the coverage efficiency for surveillance applications even in a dynamic environment. Experimental results demonstrate reasonable performance in FOV maximal breach path approximation while execution time and resources are reduced.
REFERENCES [1] J. Yick, B. Mukherjee and D. Ghosal, “Wireless sensor network
survey”, Computer Networks, Elsevier, vol. 52, pp. 2292–2330, April 2008.
[2] H. Zhang and J. C. Hou, “Maintaining sensing coverage and connectivity in large sensor networks”, Intl. Journal of Wireless Ad Hoc and Sensor Networks, vol. 1, pp.89–124, March 2005.
[3] U.M. Erdem, S. Sclaroff, “Optimal placement of cameras in floorplans to satisfy task requirements and cost constraints”, in Proc. of Omnivis2004, The fifth Workshop on Omnidirectional Vision, Camera Networks and Non-classical cameras, Prague, Czech Republic, May 2004.
[4] S. Slijepcevic and M. Potkonjak, “Power efficient organization of wireless sensor networks”, in Proc. of IEEE International Conference on Communications ICC2001, Helsinki, Finland, vol. 2, pp. 472-476, June 2001.
[5] C. Istin, D. Pescaru, H. Ciocarlie, D. Curiac and A. Doboli, “Reliable field of view coverage in video-camera based wireless networks for traffic management applications”, in Proc. of the IEEE Symposium on Signal Processing and Information Technology ISSPIT’08, Sarajevo, Bosnia-Herzegovina, pp. 63-68, December 2008.
[6] D. Tian and N. D. Georganas, “A coverage-preserving node scheduling scheme for large wireless sensor networks”, in Proc. of the 1st ACM International Workshop on Wireless Sensor Networks and Applications, Atlanta, USA, pp. 32-41, September 2002.
[7] S. Megerian, F. Koushanfar, M. Potkonjak and M. B. Srivastava, “Worst and best-case coverage in sensor networks”, IEEE Transactions on Mobile Computing, vol. 4, no. 1, February 2005.
[8] C. Istin and D. Pescaru, “Deployments metrics for video-based wireless sensor networks”, SBUPT Transactions on Automatic Control and Computer Science, vol. 52(66), no 4, pp. 163-168, September 2007.
[9] I.F. Akyildiz, W. Su, Y. Sankarasubramaniam and E. Cayirci, “A survey on sensor networks”, IEEE Communications Magazine, vol. 40, no. 8, pp. 102–114, August 2002.
[10] F. Ye, G. Zhong, J. Cheng, S. Lu and L. Zhang, “PEAS: a robust energy conserving protocol for long-lived sensor networks”, in Proc. of the 23rd International Conference on Distributed Computing Systems (ICDCS2003), USA, pp. 28-37, May 2003.
[11] Z. Zhou, S. Das and G. Gupta, “Variable Radii Connected Sensor Cover in Sensor Networks”, in Proc. of the IEEE International Conference on Sensor and Ad Hoc Communications and Networks (SECON2004), Santa Clara, USA, pp. 387-396, October 2004.
[12] X. Wang, G. Xing, Y. Zhang, C. Lu, R. Pless and C.D.Gill, “Integrated Coverage and Connectivity Configuration in Wireless Sensor Networks”, in Proc. of the First International Conference on Embedded Networked Sensor Systems, Los Angeles, California, USA, pp. 28-39, November 2003.
[13] S. Meguerdichian, F. Koushanfar, G. Qu and M. Potkonjak, “Exposure in wireless Ad-Hoc sensor networks”, in Proc. of the 7th Annual International Conference on Mobile Computing and Networking, Rome, Italy, pp. 139-150, 2001.
[14] J. Adriaens, S. Megerian and M. Potkonjak, “Optimal worst-case coverage of directional field-of-view sensor networks”, Sensor and Ad Hoc Communications and Networks, SECON'06, Reston, USA, pp. 336-345, September 2006.
[15] R. Krishnan and D. Starobinski, “Message-efficient self-organization of wireless sensor networks”, in Proc. of the IEEE Wireless Communications and Networking WCNC2003, New Orleans, USA, vol. 3, pp. 1603-1608, March 2003.
[16] Y. Chang, Z. Lin and J. Chen, “Cluster Based Self-Organization Management Protocols for Wireless Sensor Networks”, IEEE Transactions on Consumer Electronics, Vol. 52, No. 1, pp. 75-80, February 2006.
[17] L. Subramanian and R.H. Katz, “An architecture for building self-configurable systems", Workshop on Mobile and Ad Hoc Networking and Computing, MobiHOC2000, Boston, USA, pp. 63-73, June 2000.
[18] B. McLaughlan and K. Akkaya, “Coverage-based Clustering of Wireless Sensor and Actor Networks”, in Proc. of the IEEE International Conference on Pervasive Services, Istanbul, Turkey, pp. 45-54, July 2007.