Embed Size (px)
DESCRIPTION
An alternative assumed strain method
Citation preview

An alternative assumed strain method
Luo Yunhua, Anders Eriksson *
Structural Mechanics group, Department of Structural Engineering, Royal Institute of Technology, S-100 44 Stockholm, Sweden
Received 31 July 1998
Abstract
In this paper, an Alternative Assumed Strain (AAS) method is put forward, on the basis of a previous work. The method has two
main features: the stresses are eliminated from the ®nite element formulation by satisfying the stress±strain equations with the assumed
strains, which is much more convenient than the L2-orthogonal condition in Enhanced Assumed Strain (EAS) method for developing
®nite elements; the stresses, obtained from the assumed strains with the stress±strain relations, are forced to satisfy the equilibrium
equations identically to reduce the number of assumed strain parameters and to improve ®nite element ef®ciency. The method is
applied to develop several variations of 3-node triangular and 4-node quadrilateral Mindlin plate elements. Numerical examples show
that ef®cient elements could be obtained from the suggested method. Ó 1999 Elsevier Science S.A. All rights reserved.
Keywords: Hu-Washizu variational principle; Euler-Lagrangian equation; Assumed strain; Mindlin-Reissner plate
1. Introduction
In the ®eld of structural ®nite elements, when mentioning assumed strain method, one naturally thinks ofthe Assumed Natural Strain (ANS) method [1] and the Enhanced Assumed Strain (EAS) method [2±4].With similar names, the two methods are quite different. The key idea of the ANS method is thereplacement, in the minimum potential energy principle, of selected displacement-related strains by inde-pendently assumed strain ®elds in element natural coordinates. The variational basis of the original ANSmethod is not clear, which is investigated in Ref. [5]. In a general application of the ANS method, threethings have to be determined: (i) the strain components to be replaced; (ii) the positions of the samplestrains; (iii) the interpolations adopted for the independently assumed strains. Although the elementsderived from the method, e.g. MITC elements [6], usually perform rather well, there is no criterion fordetermining the above aspects, especially the second one. Some MITC elements expose de®ciency in somecases, e.g., for irregular meshes or very thin plates, MITC4 suffers from a decreased accuracy and a sta-bilization technique has to be used.
In Ref. [2], a three ®eld method, designated as Enhanced Assumed Strain (EAS) method, is put forwardfor developing ef®cient elements. A class of elements are also developed from the method. The obtainedelements are free from problems like shear locking and volumetric locking present in many purely dis-placement-based elements, but otherwise avoided by e.g. the `natural' approach, [7,8]. The EAS method isbased on the Hu±Washizu variational principle, in which the displacements, strains and stresses are alltreated as independent variables. The key idea of the method is to consider assumed strain ®elds e of theform
e � ru� ~e; �1�
Comput. Methods Appl. Mech. Engrg. 178 (1999) 23±37www.elsevier.com/locate/cma
* Corresponding author. Tel.: +46-8-790-60-00; fax: +46-8-21-69-49; e-mail: [email protected]
0045-7825/99/$ ± see front matter Ó 1999 Elsevier Science S.A. All rights reserved.
PII: S 0 0 4 5 - 7 8 2 5 ( 9 9 ) 0 0 0 0 2 - X

where ru is the compatible part of the strain ®elds and ~e the enhanced part. The stress ®elds are eliminatedfrom the ®nite element method by enforcing the conditionZ
XrT � ~e dX � 0; �2�
where r is the assumed stress vector. Two other conditions on the admissible interpolations for ~e ensureconvergence and stability of the method, [2]. Eq. (2) is called L2-orthogonal condition. Its physical meaningcould be explained as the work done by the assumed stresses on the enhanced strains being zero. Eq. (2) is thebasis of the EAS method. As the condition is expressed in an integral form, it is not convenient for ap-plication. Furthermore, the enforcement of full orthogonality on the stress ®elds at the variational levelleads to an overly restrained model. Indeed, the original displacement formulation is restored if Eq. (2) isstrictly ful®lled, [9]. Thus the orthogonality is only enforced for a constant stress ®eld.
In Refs. [10±12], a method under the name of ®eld consistence approach is suggested for developingelements. Some highly ef®cient beam elements were also obtained. From the investigation, commonisoparametric elements can be seen as degenerated cases of the elements obtained through the ®eldconsistence approach, with only low order terms retained and the relation between functions ignored. Theapproach is also used to reasonably explain shear locking and membrane locking in beam elements. InRef. [13], the approach is extended to develop 2D elements. An ef®cient 4-node quadrilateral plane stresselement, with ®ve assumed stress parameters, is obtained. In the same article, the relationship between the®eld consistence approach and other ®nite element method is investigated and a possible alternative wayfor developing ef®cient ®nite elements is opened. In this paper, on the basis of Ref. [13], an alternativeassumed strain method (AAS) is put forward. Then, the method is applied to develop Mindlin±Reissnerplate elements. Popular numerical examples are used to test the performances of the new elements fromthe method.
2. General formulation of alternative assumed strain method
The general basic equations for describing a quasi-static problem in structural mechanics can be brie¯ysummarized as follows:
The equilibrium equation is
rr� q � 0; �3�where r is the vector of stresses or internal forces, q the body force vector. The di�erentiation operator r isdetermined by the adopted structural theory.
The strain-displacement relation is
e � Lu; �4�in which e is the strain vector, u the displacement vector. L is another di�erentiation operator decided by theadopted strain de®nition.
The stress±strain relation is
r � D e; �5�where D is a matrix containing the material parameters.
Starting from the Hu±Washizu variational principle, one can establish the ®nite element formulation forthe assumed strain method. The Hu±Washizu generalized strain energy in an element is
PHW �Z
X
1
2eTDe
�� rT�Luÿ e� ÿ qTu
�dX: �6�
By introducing interpolation functions for r, e and u, according to
r � Hr�r; e � H e�e; u � Hu�u; �7�
24 Luo Yunhua, A. Eriksson / Comput. Methods Appl. Mech. Engrg. 178 (1999) 23±37

where the over-bar denotes discretised values. One can re-write Eq. (6) as
PHW � 1
2�eTFee�e� �rTFru�uÿ �rTFre�eÿ �uT �P; �8�
where
Fee �Z
XHT
e DH e dX;
Fre �Z
XHT
r H e dX;
Fru �Z
XHT
r B dX;
�P �Z
XHT
u q dX
�9�
and
B � LHu: �10�The ®rst variation of PHW is
dPHW � d�rT�Fru�uÿ Fre�e� � d�eT�Fee�eÿ FTre�r� � d�uT�FT
ru�rÿ �P� �11�
which must be zero for equilibrium, as the Hu±Washizu variational principle demands stationarity. Ob-tained from the above variation is a set of Euler±Lagrangian equations in discrete form, when noting thatthe variation must vanish for arbitrary variables,
Fru�uÿ Fre�e � 0;
Fee�eÿ FTre�r � 0;
FTru�rÿ �P � 0:
�12�
Eliminating �e and �r from Eq. (12) yields
K�u � �P; �13�
where the well-known element sti�ness matrix is
K � FTru�FreF
ÿ1ee FT
re�ÿ1Fru: �14�
The interpolation matrices H e and Hr should guarantee that Fee and (FreFÿ1ee FT
re) are of full rank.In Eqs. (7)±(14), the displacements, stresses and strains are interpolated independently. The drawback of
the procedure is obvious. A large number of unknowns are introduced in assuming the stresses and thestrains. In Eq. (14), matrix inversion is carried out twice for calculating the element sti�ness matrix. Somefurther work need be done to improve the computational e�ciency. One possible way is to interpolate thedisplacements with iso-parametric functions; the strains are independently assumed with non-nodal pa-rameters; the stresses are obtained from the stress±strain relations with the assumed strains; then, thestresses are made to satisfy the equilibrium equations pointwise with the undetermined coef®cient method inRef. [13]. In this way, the number of introduced non-nodal parameters is reduced. Furthermore, just onematrix inversion is needed in calculating the element stiffness matrix. This is the main idea of the AASmethod.
If the stress±strain relation in Eq. (5) is satis®ed with the assumed strains, the matrix Hr in Eq. (7) can beexpressed, with H e as
Hr � DH e: �15�
Luo Yunhua, A. Eriksson / Comput. Methods Appl. Mech. Engrg. 178 (1999) 23±37 25

Substituting Eq. (15) into the second and the third equations in Eq. (9) gives
Fre �Z
X�DH e�TH e dX � Fee;
Fru �Z
XHT
e DB dX�16�
With Eq. (16), the element sti�ness matrix in Eq. (14) can be re-written as
K � FTruFÿ1
ee Fru: �17�Now, if the matrices B and H e are provided, the element sti�ness matrix K can be calculated from Eqs. (16)and (17).
3. Basic equations of Mindlin±Reissner plate theory
In this and the following sections, the alternative assumed strain method is applied in developingMindlin plate elements. As is well-known, this type of elements easily su�er from shear locking. For laterreference, the basic equations of the Mindlin±Reissner plate theory are brie¯y reviewed in this section. The®nite element formulations of the Mindlin plate elements are derived in Sections 4 and 5.
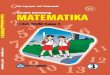
Based on the Reissner±Mindlin plate theory [14,15], the strain state at a point in a plate element can bedescribed by two curvatures jx, jy , one twist curvature jxy and two transverse shear strains cx, cy (see Fig. 1).
jx � ÿ owx
ox; jy � ÿ
owy
oy; jxy � ÿ owx
oy
�� owy
ox
�; cx �
owoxÿ wx; cy �
owoyÿ wy ; �18�
where w;wx and wy are, respectively, the transverse displacement and the two sectional rotations.The stress±strain relation (or internal force-strain relation) is
r � De �19�in which
r � �Mx My Mxy Qx Qy �T;
e � �jx jy jxy cx cy �T:�20�
In the ®rst of Eq. (20), Mx and My are the sectional bending moments, Mxy the sectional twisting moment,while Qx and Qy are sectional shear forces.
Mx �Z t=2
ÿt=2
zrx dz; My �Z t=2
ÿt=2
zry dz; Mxy �Z t=2
ÿt=2
zsxy dz;
Qx �Z t=2
ÿt=2
sxz dz; Qy �Z t=2
ÿt=2
syz dz:
�21�
Fig. 1. Internal forces of Mindlin±Reissner plate.
26 Luo Yunhua, A. Eriksson / Comput. Methods Appl. Mech. Engrg. 178 (1999) 23±37

D is the physical property matrix
D �
D1 D2 0 0 0D2 D1 0 0 00 0 D3 0 00 0 0 D4 00 0 0 0 D4
266664377775; �22�
where
D1 � Et3
12�1ÿ m2� ; D2 � mEt3
12�1ÿ m2� ; D3 � Et3
24�1� m� ; D4 � kGt: �23�
E and m are, respectively, Young's modulus and Poisson's ratio.The Hu±Washizu generalized strain energy in a plate element is
PHW �Z
A
1
2D1j
2x
�� D2jxjy � 1
2D1j
2y �
1
2D3j
2xy �
1
2D4c
2x �
1
2D4c
2y �Mx
�ÿ owx
oxÿ jx
��My
�ÿ owy
oyÿ jy
��Mxy
�ÿ owx
oyÿ owy
oxÿ jxy
��Qx
owox
�ÿ wx ÿ cx
�� Qy
owoy
�ÿ wy ÿ cy
��dA: �24�
From Eq. (24), a set of thirteen Euler±Lagrangian equations can be derived
oQx
ox� oQy
oy� 0; �25a�
oMx
ox� oMxy
oyÿ Qx � 0; �25b�
oMxy
@x� oMy
oyÿ Qy � 0; �25c�
D1jx � D2jy ÿMx � 0; �25d�
D2jx � D1jy ÿMy � 0; �25e�
D3jxy ÿMxy � 0; �25f�
D4cx ÿ Qx � 0; �25g�
D4cy ÿ Qy � 0; �25h�
ÿjx ÿ owx
ox� 0; �25i�
ÿjy ÿowy
oy� 0; �25j�
ÿjxy ÿ owx
oyÿ owy
ox� 0; �25k�
owoxÿ wx ÿ cx � 0; �25l�
Luo Yunhua, A. Eriksson / Comput. Methods Appl. Mech. Engrg. 178 (1999) 23±37 27

owoyÿ wy ÿ cy � 0: �25m�
As all the external forces have been allocated to element nodes, the Eqs. (25a),(25b),(25c) describe theequilibrium in the interior of an element. Eqs. (25d),(25e),(25f),(25g),(25h) represent the relations betweenthe internal forces and the generalized strains. Eqs. (25i),(25j),(25k),(25l),(25m) relate the strains to thedisplacements.
In the alternative assumed strain method, the displacements are interpolated with isoparametric func-tions. The matrix B can be derived by the adopted strain de®nition. To construct the assumed strain matrixH e, the following steps can be followed:
(1) assume jx, jy and jxy ;(2) obtain Mx, My and Mxy respectively from (25d)±(25f), with jx, jy and jxy ;(3) obtain Qx from (25b) and Qy from (25c);(4) make Qx and Qy satisfy (25a);(5) obtain cx from (25g) and cy from (25h) with Qx, Qy , respectively;(6) construct H e from jx, jy , jxy , cx and cy .
4. Derivation of B matrix
In the application of the alternative assumed strain method to develop a ®nite element, the maintask is to derive the matrices B and H e. In this section, the expression of the matrix B is derived with respectto 3-node triangular and 4-node quadrilateral elements. The derivation of matrix H e is left to next section.
4.1. 3-node plate bending elements
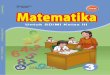
In a triangular element shown in Fig. 2, the physical coordinates of an arbitrary point in the element canbe expressed, with natural coordinates, as
x � L1x1 � L2x2 � L3x3;y � L1y1 � L2y2 � L3y3;
�26�
where
L1 � 1ÿ r ÿ s; L2 � r; L3 � s: �27�From Eqs. (26) and (27), the Jacobian can be calculated as
J � x2 ÿ x1 y2 ÿ y1
x3 ÿ x1 y3 ÿ y1
� �: �28�
Fig. 2. A 3-node triangular element in physical and natural coordinate system.
28 Luo Yunhua, A. Eriksson / Comput. Methods Appl. Mech. Engrg. 178 (1999) 23±37

It can be noted that the Jacobian is a constant matrix for a triangular element. Its inverse is I � Jÿ1. Forconvenience, the following symbols are introduced
I11 � I �1; 1�; I12 � I �1; 2�; I21 � I �2; 1�; I22 � I �2; 2�: �29�
Therefore, the derivatives of a function, f �r; s�, with respect to x and y can be calculated as
ofox� I11
ofor� I12
ofos;
ofoy� I21
ofor� I22
ofos:
�30�
The displacements are interpolated with the same interpolations as in Eq. (27)
w � L1w1 � L2w2 � L3w3;
wx � L1w1x � L2w
2x � L3w
3x ;
wy � L1w1y � L2w
2y � L3w
3y :
�31�
With the strain de®nition in Eq. (18) and the displacements in Eq. (31), the strain matrix B can be derived
B �
0 I11 � I12 0 0 ÿ I11 0 0 ÿ I12 00 0 I21 � I22 0 0 ÿ I21 0 0 ÿ I22
0 I21 � I22 I11 � I12 0 ÿ I21 ÿ I11 0 ÿ I22 ÿ I12
ÿI11 ÿ I12 ÿ L1 0 I11 ÿ L2 0 I12 ÿ L3 0ÿI21 ÿ I22 0 ÿ L1 I21 0 ÿ L2 I22 0 ÿ L3
266664377775: �32�
4.2. 4-node plate bending elements
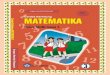
A typical 4-node quadrilateral element is described in Fig. 3. The physical coordinates of a particle in theelement can be interpolated as
x � h1x1 � h2x2 � h3x3 � h4x4; y � h1y1 � h2y2 � h3y3 � h4y4 �33�
where hi (i� 1, 2, 3, 4) are bilinear isoparametric interpolations
hi � 1
4�1� rir��1� sis� �ri � �1; si � �1�: �34�
Fig. 3. A 4-node quadrilateral element in physical and natural system.
Luo Yunhua, A. Eriksson / Comput. Methods Appl. Mech. Engrg. 178 (1999) 23±37 29

The Jacobian matrix of the coordinate transformation is calculated as
J �oxor
oyor
oxos
oyos
" #: �35�
In the following development, to reduce element sensitivity to geometric distortion, an averaged Jacobian,�J , is used, [16]
�J �R
AJj dr dsA
�36�
in this expression, j � det�J� is the determinant of the Jacobian J and A � R 1
ÿ1
R 1
ÿ1j dr ds is the area of the
quadrilateral element.Now the Jacobian �J and its inverse matrix I � �J ÿ1 are constant matrices. Similar to that in the last sub-
section, the following symbols are de®ned
I11 � I �1; 1�; I12 � I �1; 2�; I21 � I �2; 1�; I22 � I �2; 2�: �37�The displacement ®elds are interpolated with the same interpolation functions as in Eq. (34)
w � h1w1 � h2w2 � h3w3 � h4w4;
wx � h1w1x � h2w
2x � h3w
3x � h4w
4x ; �38�
wy � h1w1y � h2w
2y � h3w
3y � h4w
4y :
Similarly, the strain matrix B can be derived from Eqs. (18), (30) and (38)
B �
0 b1 0 0 b2 0 0 b3 0 0 b4 00 0 b5 0 0 b6 0 0 b7 0 0 b8
0 b9 b10 0 b11 b12 0 b13 b14 0 b15 b16
b17 ÿ h1 0 b18 ÿ h2 0 b19 ÿ h3 0 b20 ÿ h4 0b21 0 ÿ h1 b22 0 ÿ h2 b23 0 ÿ h3 b24 0 ÿ h4
266664377775: �39�
The expressions for bi �i � 1; 2; . . . ; 24� are given in Appendix A.
5. Assumed strains and derivation of H
To derive the matrix He needed for calculating the element sti�ness matrix in Eq. (17), a set of assumedstrains is selected. Theoretically, there is no way to determine the optimum assumed strains at this moment.A trial-check method has to be used to sift out a good element. Six possible sets of assumed strains are chosen
jx � a1 � a2r; jy � a3 � a4s; jxy � a5 �40a�
jx � a1 � a2s; jy � a3 � a4r; jxy � a5 �40b�
jx � a1 � a2r; jy � a3 � a4s; jxy � a5 � a6r � a7s �40c�
jx � a1 � a2s; jy � a3 � a4r; jxy � a5 � a6r � a7s �40d�
jx � a1 � a2r � a3s; jy � a4 � a5r � a6s; jxy � a7 � a8r � a9s �40e�
jx � a1 � a2r � a3s� a4rs; jy � a5 � a6r � a7s� a8rs; jxy � a9 � a10r � a11s� a12rs �40f�The above sets of assumed strains are arranged from simple to complex and selected according to therequirements of (quasi-)completeness and (anti-)symmetry in Ref. [13]. In Eqs. (40a) and (40c), the assumedjx and jy are quasi-complete ®rst order polynomials, while the assumed jx and jy in Eqs. (40b) and (40d)satisfy anti-symmetry. It can be seen, from the following derivation in this section, that it is impossible for
30 Luo Yunhua, A. Eriksson / Comput. Methods Appl. Mech. Engrg. 178 (1999) 23±37

the assumed jx and jy to be constants in the alternative assumed strain method. If constant jx and jy wereadopted, the moments Mx and My in Eq. (41) would be also constants and the shear forces Qx and Qy in Eq.(42) would be zero. The shear strains cx and cy are thus zero, leading to a singular matrix He.
In the alternative assumed strain method, the construction of the matrix He is independent of the elementcon®guration. With the same set of assumed strains, a triangle and a quadrilateral can have an identicalmatrix He. The set of assumed strains in Eq. (40d) is taken as an example to demonstrate how the matrix He
is derived.Following the procedure described at the end of Section 3, the assumed strains in Eq. (40d) are sub-
stituted in Eqs. (25d),(25e),(25f) to calculate the internal forces Mx, My and Mxy
Mx � D2a4r � D1a2s� D1a1 � D2a3;
My � D1a4r � D2a2s� D2a1 � D1a3;
Mxy � D3�a6r � a7s� a5�:�41�
With Mx, My and Mxy , the internal forces Qx and Qy can be obtained respectively from Eqs. (25b) and (25c)
Qx � I11D2a4 � I12D1a2 � D3�I21a6 � I22a7�;Qy � I21D1a4 � I22D2a2 � D3�I11a6 � I12a7�; �42�
As Iij�i; j � 1; 2� are constants, Qx and Qy are also constants and satisfy the equilibrium equation in Eq.(25a). The strains cx and cy can be derived respectively from Eqs. (25g) and (25h) with Qx and Qy . Thematrix He is thus obtained
He �
1 s 0 0 0 0 00 0 1 r 0 0 00 0 0 0 1 r s0 I12
D1
D40 I11
D2
D40 I21
D3
D4I22
D3
D4
0 I22D2
D40 I21
D1
D40 I11
D3
D4I12
D3
D4
266664377775: �43�
Exactly the same procedures can be followed to derive the matrix He corresponding to any of the other setsof assumed strains in Eqs. (40). The triangular elements corresponding to the assumed strains inEqs. (40a),(40b),(40c),(40d),(40e),(40f) are labeled, respectively, PLT3-1, PLT3-2, . . ., PLT3-6. The quad-rilateral elements corresponding to the assumed strains are denoted as PLT4-1, PLT4-2, . . ., PLT4-6.
6. Numerical tests
In this section, several numerical examples are used to illustrate the performance of the newly developedelements, thus to demonstrate the practicability of the alternative assumed strain method in developinge�cient ®nite elements. Another aim of the tests is to sift out an element with good performance. The testedperformances include convergence, shear locking and e�ects from geometric distortion. Three well-knownexamples are selected: a square plate, a rhombic plate and a circular plate. The obtained results arecompared to some well-known existing elements.
The ®rst example is a simply-supported square plate, shown as Fig. 4, with side length L� 10, thicknesst� 0.1, Young's modulus E� 10.92 and Poisson's ratio m � 0:3. The plate is affected by uniformly dis-tributed transverse load. For symmetry, only one quarter of the plate was analyzed. First, the convergenceof the elements is checked by recording the de¯ection variation at the plate center with mesh density. Theobtained de¯ection is normalized with the series solution [17], which is wc � 4:0568� 104 for the abovegiven parameters. The results of convergence tests are given in Fig. 5.
It was found that element PLT4-2 is very ¯exible. For keeping a suitable scale, the curve obtained byPLT4-2 is not displayed in the ®gure. The results are compared to MITC4 developed by Bathe [1], T1by Hughes [18] and an EAS element by Simo [2]. From the results, it can be seen that all the quad-rilateral elements except PLT4-2 behave fairly well in this test, especially PLT4-5 and PLT4-6. Theperformance of PLT4-5 and PLT4-6 in a coarse mesh is even better than that of the reference elements.
Luo Yunhua, A. Eriksson / Comput. Methods Appl. Mech. Engrg. 178 (1999) 23±37 31

Most of the triangular elements, except PLT3-2, are too sti�. Two deformed con®gurations of the plateare displayed in Fig. 6, respectively obtained by PLT3-2 with a 8� 8� 2 mesh and by PLT4-5 with a8� 8 mesh.
The elements were also tested with respect to their performance in simulating thin plates. To this end, theabove structure was re-analyzed but in a slightly di�erent way. The mesh pattern was ®xed as 8� 8� 2 fortriangular elements or 8� 8 for quadrilateral elements. The plate thickness was changed according tot � 10ÿm with m � 0 � 4. Fig. 7 shows the results of shear-locking tests, the variation of normalized centraltransverse displacement with aspect ratio log10�L=2t�.
For the mentioned reason, the result from PLT4-2 is not displayed. The results show that all thequadrilateral elements are free of shear locking. In triangular elements, PLT3-6 obviously su�ers from shearlocking. PLT3-1, PLT3-3, PLT3-4 and PLT3-5 are too sti� if used to analyze thin structure. Element PLT3-2 can pass the test.
The second example is a simply supported 30° skew plate, with side length L� 100, thickness t� 1,Young's modulus E � 103 and Poisson's ratio m � 0:3. The plate is acted by uniform load q� 1. The meshcon®gurations of the plate with triangular and quadrilateral elements are shown in Fig. 8. The aim of thistest was to check element performance in geometric distortion. It is believed that this test is a dif®cult case.
Fig. 5. Central de¯ection of the square plate: (a) triangular elements; (b) quadrilateral elements.
Fig. 4. Simply supported square plate meshed with: (a) triangular elements; (b) quadrilateral elements.
32 Luo Yunhua, A. Eriksson / Comput. Methods Appl. Mech. Engrg. 178 (1999) 23±37

The obtuse corners are singular points, where moments are theoretically in®nite. The adopted mesh pattern(a) in Fig. 8 is particularly unfavorable to triangular elements.
The variation of the central de¯ection with mesh density is investigated. The obtained results are given inFig. 9. In this case, Elements PLT3-6 and PLT4-6 failed due to singular matrices. The ®gures show that alltriangular elements are too sti�; approximately only 50% of the series solution is reached, while most of thequadrilateral elements can give satisfactory results, compared to the reference elements. Fig. 10 displaystwo typical deformed con®gurations of the skew plate, obtained respectively by PLT3-2 with a 16� 16� 2mesh and PLT4-4 with a 16� 16 mesh.
The third example is a simply supported circular plate with modulus of elasticity E� 10.92, Poisson'sratio m � 0:3, radius R� 5 and thickness t� 0.1, and subjected to a uniform load q� 1. The objective of thistest was to check if satisfactory results can be obtained when an irregular mesh is used. Fig. 11 shows themesh con®gurations. Once again, an unfavorable mesh pattern was adopted for the triangular elements.Fig. 12 gives the obtained results, the variation of central de¯ection with mesh density. Two deformedcon®gurations are given in Fig. 13. Similarly as in the previous test, all the triangular elements behave too
Fig. 6. Deformed con®gurations obtained by: (a) triangular elements; (b) quadrilateral elements.
Fig. 7. Shear-locking tests: (a) triangular elements; (b) quadrilateral elements.
Luo Yunhua, A. Eriksson / Comput. Methods Appl. Mech. Engrg. 178 (1999) 23±37 33

Fig. 8. Rhombic plate meshed with: (a) triangular elements; (b) quadrilateral elements.
Fig. 10. Deformed con®gurations obtained by: (a) triangular elements; (b) quadrilateral elements.
Fig. 9. Central de¯ection of the rhombic plate: (a) triangular elements; (b) quadrilateral elements.
34 Luo Yunhua, A. Eriksson / Comput. Methods Appl. Mech. Engrg. 178 (1999) 23±37

Fig. 11. One quarter of the circular plate meshed with: (a) triangular elements; (b) quadrilateral elements.
Fig. 12. Central de¯ection of the circular plate obtained by: (a) triangular elements; (b) quadrilateral elements
Fig. 13. Deformed con®gurations obtained by: (a) triangular elements; (b) quadrilateral elements.
Luo Yunhua, A. Eriksson / Comput. Methods Appl. Mech. Engrg. 178 (1999) 23±37 35

stif¯y in this test but a little better than in the previous one. It can be seen that all the quadrilateral behavefairly satisfactory.
From the above numerical tests, element PLT4-5 behaved the best among all the triangular andquadrilateral elements with respect to the tested performances. Among the triangular elements, elementPLT3-2 performed rather well in regular meshes, but gave a largely decreased accuracy in distorted meshes.Although some of the newly developed elements behaved too sti�y in the tests, it is easy to obtain anelement free of shear locking with the alternative assumed strain method.
7. Concluding remarks
In this paper, an alternative assumed strain method is put forward, on the basis of the extended ®eldconsistence approach in Ref. [13]. The method has two main features: the stresses are eliminated from the®nite element formulation by satisfying the stress±strain equations with the assumed strains, which is muchmore convenient than the L2-orthogonal condition in Ref. [2] for developing ®nite elements; the stresses,obtained from the assumed strains with the stress±strain relations, are forced to satisfy the equilibriumequations pointwise to reduce the number of assumed strain parameters and to improve element ef®ciency.The method is applied to develop Mindlin plate elements, including 3-node triangles and 4-node quadri-laterals. The numerical results from several well-known examples show that most of the quadrilateralelements derived from the method have fairly good performances in the selected tests. The obtained tri-angular elements behave not so satisfactory. The reason might be that the order of interpolations for thedisplacements is too low. The triangular elements could possibly be improved by adopting higher orderinterpolations for the displacements. The study suggests that the alternative assumed strain method is a newway for developing ef®cient ®nite elements.
Appendix A
The expressions of bi �i � 1; 2; . . . ; 24� in the matrix B in Eq. (39)
b1 � 14�I11�1ÿ s� � I12�1ÿ r��; b2 � ÿ 1
4�I11�1ÿ s� � I12�1� r��;
b3 � ÿ 14�I11�1� s� ÿ I12�1� r��; b4 � 1
4�I11�1� s� ÿ I12�1ÿ r��;
b5 � 14�I21�1ÿ s� � I22�1ÿ r��; b6 � ÿ 1
4�I21�1ÿ s� � I22�1� r��;
b7 � ÿ 14�I21�1� s� ÿ I22�1� r��; b8 � 1
4�I21�1� s� ÿ I22�1ÿ r��;
b9 � 14�I21�1ÿ s� � I22�1ÿ r��; b10 � 1
4�I11�1ÿ s� � I12�1ÿ r��;
b11 � ÿ 14�I21�1ÿ s� � I22�1� r��; b12 � ÿ 1
4�I11�1ÿ s� � I12�1� r��;
b13 � ÿ 14�I21�1� s� ÿ I22�1� r��; b14 � ÿ 1
4�I11�1� s� ÿ I12�1� r��;
b15 � 14�I21�1� s� ÿ I22�1ÿ r��; b16 � 1
4�I11�1� s� ÿ I12�1ÿ r��;
b17 � ÿ 14�I11�1ÿ s� ÿ I12�1ÿ r��; b18 � 1
4�I11�1ÿ s� ÿ I12�1� r��;
b19 � 14�I11�1� s� � I12�1� r��; b20 � ÿ 1
4�I11�1� s� � I12�1ÿ r��;
b21 � ÿ 14�I21�1ÿ s� ÿ I22�1ÿ r��; b22 � 1
4�I21�1ÿ s� ÿ I22�1� r��;
b23 � 14�I21�1� s� � I22�1� r��; b24 � ÿ 1
4�I21�1� s� � I22�1ÿ r��:
References
[1] K.J. Bathe, E.N. Dvorkin, A four node plate bending element based on mindlin reissner plate theory and a mixed interpolation,
Int. J. Num. Meth. Engng 21 (1985) 367±383.
[2] J.C. Simo, M.S. Rifai, A class of mixed assumed strain methods and the method of incompatible modes, Int. J. Num. Meth.
Engng. 29 (1990).
36 Luo Yunhua, A. Eriksson / Comput. Methods Appl. Mech. Engrg. 178 (1999) 23±37

[3] J.C. Simo, F. Armero, Geometrically nonlinear enhanced mixed methods and the method of incompatible modes, Int. J. Num.
Meth. Engng 33 (1992) 1413±1449.
[4] J.C. Simo, F. Armero, R.L. Taylor, Improved version of assumed enhanced strain tri-linear elements for 3D ®nite deformation
problems, Comput. Methods Appl. Mech. Engrg. 110 (1993) 359±386.
[5] C. Militello, C.A. Felippa, A variational justi®cation of the assumed natural strain formulation of ®nite elements ± I. variational
principles II. the C0 four-node plate element, Computers & Structures 34 (1990) 439±444.
[6] K.J. Bathe, Finite Element Procedures, Prentice Hall, Englewood, NJ, 1996.
[7] J.H. Argyris, P.C. Dunne, G.A. Malejannakis, E. Schelkle, A simple triangular facet shell element with applications to linear and
non-linear equilibrium and elastic stability problem, Comput. Methods Appl. Mech. Engrg. 10 (1977) 371±403.
[8] J. Argyris, L. Tenek, L. Olofsson, TRIC: A simple but sophisticated 3-node triangular element based on 6 rigid-body and 12
straining modes for fast computational simulations of arbitrary isotropic and laminated composite shells, Comput. Methods Appl.
Mech. Engng. 145 (1997) 11±85.
[9] J. Korelc, Symbolic Approach in Computational Mechanics and its Application to the Enhanced Strain Method, Ph. D.
dissertation, Darmstadt, 1996.
[10] Y.-H. Luo, Field consistence method with application to the development of ®nite element, NACM X, Tallinn, 1997.
[11] Y.-H. Luo, On Shear Locking in Finite Elements, Licentiate thesis, Stockholm, 1997.
[12] Y.-H. Luo, Explanation and elimination of shear locking and membrane locking with ®eld consistence approach, Comput.
Methods Appl. Mech. Engrg., 162 (1998) 249±269.
[13] Y.-H. Luo, A. Eriksson, Extension of ®eld consistence approach into developing plane stress elements. Accepted by Comput.
Methods Appl. Mech. Engrg., 1998.
[14] E. Reissner, The e�ect of transverse shear deformation on the bending of elastic plates, Journal of Applied Mechanics 67 (1945)
A69±A77.
[15] R.D. Mindlin, In¯uence of rotary inertia and shear on ¯exural motion of isotropic elastic plates, Journal of Applied Mechanics 18
(1951) 31±38.
[16] Y.-H. Luo, A technique for reducing ®nite element sensitivity to geometric distortion, manuscript submitted to Computers and
Structures, 1998.
[17] S. Timoshenko, Theory of Plates and Shells, McGraw-Hill, New York, 1940.
[18] T.J.R. Hughes, T.E. Tezduyar, Finite elements based upon Mindlin plate theory with particular reference to the four-node bilinear
isoparametric element, Journal of Applied Mechanics 48 (1981) 587±595.
Luo Yunhua, A. Eriksson / Comput. Methods Appl. Mech. Engrg. 178 (1999) 23±37 37