Embed Size (px)
Citation preview

1
JAMSTEC Rep. Res. Dev., Volume 14, March 2012, 1_15
— Original Paper —
Sea-floor in situ measurement of orientation of geological structuresusing a top clinometer
Hayato Ueda1*
The top clinometer is a newly developed payload tool which enables a submersible vehicle to directly measure orientation of
planar geological structures (e.g. bedding planes, faults) on seafloor outcrops. It consists of a disc and central vertical bar, both
graduated at 1 cm scales, and a handle. On seafloor outcrops, the disc is placed on the geological surface of interest by a manipulator,
and is captured by a still camera. The orientations are determined via simple onboard graphic analyses of the images obtained and the
submersible log data. Strike and dip of the surface structures are routinely calculated by a macro program within a Microsoft Excel
worksheet. Theoretical and laboratory tests suggest errors of the measurements in the same order as magnetic clinometer compasses
commonly used for on-land geological surveys. Camera installation angles to the submersible Shinkai 6500 were also calibrated based
on on-deck tests during R/V Yokosuka YK08-05 and YK10-13 Leg2 cruises. Results of three practical measurements suggested that
speed of the operation depends heavily on the time spent looking for the target surfaces and the time for communication between
operators and scientists. Besides these factors, a measurement can be taken in as little as five minutes. This simple and quick method
improves the quality of structural measurements for submarine geology.
Keywords: clinometer, geological structure, submersible, payload, in situ measurement
Received 4 April 2011 ; accepted 17 October 2011
1 Faculty of Education, Hirosaki University
*Corresponding author:
Hayato Ueda
Faculty of Education, Hirosaki University
1 Bunkyocho, Hirosaki 036-8560, Japan
Tel. +81-172-39-3366
Copyright by Japan Agency for Marine-Earth Science and Technology

1. Introduction
Geological structures generally record local stress and/or
strain and their time-integration as the results of crustal dynamics.
They are recognized by spatial variation of geological surface
structures such as bedding planes, foliations, fractures, and faults,
as well as that of linear structures such as fold axes and stretching
lineations. For example, among planar structures, open fracture
and dike intrusion surfaces are typically suggestive of orientation
of local extensional stress normal to them, and their spatial
variation reflects a stress field at a shallow crustal level.
Metamorphic foliation develops normal to the shortening axis in
deep crustal levels, and its variation may reflect flow fields during
and after the metamorphism. Fold structures can sometimes be
detected among variously dipping bedding planes, from which
crustal shortening and rotation axes can be analyzed. If
crosscutting relations of geological structures of different styles
and orientations are observed, historical changes of stress and/or
strain fields can also be deduced. Orientations and spatial variation
of geological structures thus provide basic and important
information. Geologists routinely measure such orientations on
land using clinometer compasses.
Submersible dives are a method of marine geological
survey that enable surface geological mapping, in-situ observation
of outcrop features, and direct sampling of rocks exposed on the
seafloor. This style of research enables understanding of detailed
geological structures and their spatial variations on the seafloor.
However, because of the extreme water pressure at depth, few
tools are available to measure orientations of geological structures.
The first and probably the only tool of practical use is the
Geocompass, a magnetic clinometer compass contained in a
pressure medium. This instrument was developed at the Woods
Hole Oceanographic Institution. The Geocompass was payloaded
on the submersible Alvin, and quantitative orientation data of
planer geological structures and oriented specimens were obtained
(e.g. Hurst et al, 1994; Cogné et al., 1995; Lawrence et al., 1998;
Karson et al., 2006). Although it is a successful tool, several
problems have also been reported (Kocak et al., 1999): the
measurements are affected by the magnetic fields of the
submersible and strongly magnetized rocks; its operation requires
piloting skills and time consumption; and because of its large
dimension with attached cable it occupies an entire sample basket.
In addition, such a special and space-consuming apparatus may be
payloaded only when orientation measurements are one of the
main purposes at sites where measureable structures are known or
expected to occur.
Apart from this apparatus, planar geological structures on
seafloor outcrops have also been qualitatively or semi-
quantitatively measured from submersible windows and from
video records (e.g. Ogawa et al., 1997; Anma et al., 2010). If
24075
12011
0
Central vertical bar Float (H52 x W32 x D22)
Central vertical bar (φ6 x L110 steal headless screw)
φ7 rope
Bar scale(painted at 10 mm intervals)
Steal hex nuts
Hex nut (M6 x H20)
Countersunk screw (M6 x L27)
60o
Hex nut (M6 x H5)
Concentric scale (painted at 10 mm intervals)
Stainless steal blade (t3)
Stainless steal pipe (φ19 x t2.5)
Acryl disc (t10) Steal disc (t10)
166
96
8
20
Fig.1. Dimension of the top clinometer.
Geological clinometer for submersibles
2 JAMSTEC Rep. Res. Dev., Volume 14, March 2012, 1_15

another easily-used tool for quantitative measurements of
geological structures could be developed, research of geological
structures by submersibles would be greatly improved.
Under deep-sea environments, a clinometer compass
must satisfy several requirements. The first is, of course, resistance
to high water pressure. The second point is swiftness of operation
during measurement, because research time during dives is very
limited, and structural data generally need to be collected in
quantity. Third, the equipment should be simple to use and as safe
as possible, with minimal potential for troubles, especially which
could damage the submersible. Fourth, its dimension and weight
must be within the capacity of the submersible. In addition, low
cost and common use is preferable.
During JAMSTEC YK08-05 cruise in April 2008, dive
surveys by the submersible Shinkai 6500 were conducted to
explore the geological structure of schistose serpentinite
(antigorite schist) occurring at the foot of Ohmachi Seamount in
the Izu-Bonin arc. A simple clinometer (referred to hereafter as a
“top clinometer”) available for deep-sea submersible surveys was
newly developed and utilized on this cruise. The top clinometer
was briefly introduced in an appendix of Ueda et al. (2011). More
detailed specification, methodology, and evaluation is presented
here, with further examination after on-deck tests during cruise
YK10-13 Leg2, also to Ohmachi Seamount.
2. Top clinometer and its operation
The top clinometer consists of an acryl disc 24 cm in
diameter and a 12 cm long steel bar attached normal to the disc at
its center (central vertical bar: Fig. 1). The disc has concentric
scale lines at 1 cm intervals, and the bar is also graduated at 1 cm
scale. Note that values of the disc diameter, the bar length, and
graduation intervals are not specific. After on-deck manufacturing
by the Shinkai 6500 operation team of R/V Yokosuka, the disc was
backed with a steel disc of the same diameter for reinforcement
and weight, and a steel handle was welded to the edge of the steel
disc. The top clinometer is thus shaped like a frying pan with a
central vertical bar. It is carried in a sample basket of the
submersible during the dive. During measurement, a manipulator
handles and sets the clinometer on the outcrop with the disc
directly on, or parallel to, the geological surface of interest (Fig. 2).
An image of the clinometer set on the outcrop is then captured by
the digital still camera fitted on the Shinkai 6500. This is all that
needs to be done during the dive. During image capture, it is
necessary to adjust the disc such that the central vertical bar is
wholly visible to the camera (Fig. 2). It is preferable to capture
both wide-angle and telescopic images, although either alone
could be used for the analysis. A wide-angle image records not
only the orientation of the clinometer but also the features of the
geological surface structure of interest, and is thus useful for
evaluation and geological interpretation of the measurement. The
telescopic image provides a higher-resolution view of the
clinometer and gives better graphical measurements.
Orientations of the vehicle and the camera and the focal
length at image capture must also be recorded, either
automatically or manually. In case of the submersible Shinkai
6500, the still camera is set attached to the movable No.2 video
camera sharing the same rotation axes. The No.2 video images
record the camera angle (pan and tilt) as telops, together with
attitude of the vehicle (heading and pitch angles). The attitudinal
data of the vehicle (heading, pitch, and roll angles) are also
recorded in the ship log data with time stamps. Focal length of the
still camera at time of image capture is recorded in the Exif data
enclosed in each JPEG-formatted image file.
Camera Camera
Fig.2. Illustrations showing ways to place the top clinometer against geological structures of varying orientation.
H. Ueda
3JAMSTEC Rep. Res. Dev., Volume 14, March 2012, 1_15

3. Theory
When the top clinometer is attached to a planar geological
structure, the disc and the vertical bar represent the surface itself
and its normal line (pole to the surface), respectively. The Xʼ axis
corresponds to the sight line to the disc center (the line between
the camera lens center and the disc center), and the YʼZʼ plane to
the plane normal to the Xʼ axis including the disc center (Fig. 3).
The Yʼ axis is defined as the intersection of the disc plane and the
YʼZʼ plane. The Zʼ axis is normal both to Xʼ and Yʼ axes, and is
found as the projection of the central vertical bar onto the YʼZʼ plane.
The orientation of the pole relative to the camera attitude
can be described by the following two critical values. First is the
angle (ψ ) of the bar to the sight line, whose rotation axis
corresponds to the Yʼ axis (Fig. 3B). Second is the tilt angle (ξ)
of the Yʼ axis from the camera horizontal rotated around the Xʼ-axis (Fig. 3A). The angleξ is equal to the lean of the Zʼ axis (Fig.
3A). When the disc is pictured at the exact center, the YʼZʼ plane is
equivalent to the picture plane, so that the angleξcan be directly
read from the lean angle of the bar projection in the image.
Otherwise, both the planes obliquely cross, and the angleξ is
derived geometrically from its projection onto the picture plane
(angleξa in Fig. 4B).
The angleψcan be known from a set of points on the bar
(B in Fig. 3B) and the disc (C), both of which lie on a single sight
line BC from the camera lens center, applying the following
relations:
tanφ= c / b (1)
sinα = b sinφ / do (2)
ψ=φ–α (3)
where b and c are the distance of points B and C from the
disc center, respectively; do is the distance of the disc center from
the camera lens center;φ is the angle between the bar and the
sight line BC; andα is the angle between the sight line to the disc
center (Xʼ-axis) and the site line BC. Practically, B and C are
found at a point where scales of the bar and disc are overlapped in
the picture (Fig. 5), and the lengths b and c are read from the
scales printed on the bar and the disc at this point. The distance do
is estimated by proportion of image size of the disc to its real size
(Fig. 3c):
do / di = ro / ri (4)
where ro is the real disc radius, ri is the radius of the disc
projected onto the film or the image sensor such as CCD, and di is
the distance of the imaged disc center from the lens center. In the
case of a digital camera, the image radius ri is defined by the
following equation:
ri =� ρrp = ρD2
x + D2y / 2� � ��
(5)
X’ axis
Optical axis
tanφ = c / bsinα = bsinφ / doψ = φ − α
bdoψ
φ
α
c
Camera
Z’ axis
Z’ axis
Y’ axis
Y’ ax
is
B
Y’
C
Sight line BC
Sight line to the disc center
do = di * ro / ridi ≈ f / cosγ
γ
do
ro
ri
~f
ξ
ξ
Horizontal
Projection of the central vertical bar onto Y’Z’ plane
Verti
acl(A)
(B)
(C)
X’
Imagingsensor
X’ axis
bsin
φ
Pictu
re pl
ane
Film
plane
di
Fig. 3. Determination of orientation of the pole (normal line) to a disc surface by picturing. (A) A front view parallel to the sight line (Xʼ axis), (B) lateral
view parallel to the Yʼ axis, and (C) proportional relations of real/imaged dimensions to distances from the objective lens (a view normal to the Xʼ axis and
to the picture plane).
Geological clinometer for submersibles
4 JAMSTEC Rep. Res. Dev., Volume 14, March 2012, 1_15

whereρ is the density of picture elements (numbers of
pixels per unit length) on the image sensor (Table 1); Dx and Dy
are numbers of pixels (px) for horizontal and vertical projections
of apparent long diameter of the elliptically imaged disc on the
picture (Fig. 5); and rp is the imaged disc radius in the px-
equivalent unit. The distance di can be obtained applying the lens
formula or by an approximation as:
di cosγ= 1 / (1/f - 1/ do) ≈ f (6)
where f denotes the focal length, andγdoes the angle
between the optical and Xʼ axes (Fig. 3C).
Since orientation of the bar (i.e. pole to the surface of
interest) relative to the sight line is determined, it is processed
mainly through three kinds of correction (picture centering,
camera angle, and the ship posture) by coordinate system
rotations.
4. Graphic measurement and calculation
After video and camera images and dive log data are
retrieved from the Shinkai 6500, graphic measurement is then
required as well as collection of other data such as attitudes of the
vehicle and camera. The procedure of the graphical measurement
is described below, and illustrated in Fig. 5. All measurement can
be done using common graphic retouching software either
ψ
ψξ Sight line to
disc centerX’ axis
Y’ axis
Disc plane(surface
of
N
E
Heading & pan angles
Y’Z’ plane
Pitch & tilt angles
Central vertical bar(pole to the surface)
Great ci
rcle
of Y’-ax
is
interest)
ξ
ξ
ξaPicture verticalDisc
plane
Z’
Y’
X’ H
V
Pictur
e plan
e
Y’Z’ p
lane
Central vertical bar
Bar projections
Centering angle
(A) (B)
Cx
Dx
Tx
[Overlapped point]Bar scale (b) = 6 cm Disc scale (s) = 11 cm
Cy
Dy
T y
Fig. 4. Equal-area projections (lower hemisphere) showing geometry of surfaces for the top clinometer measurements. (A) Relationship between the
orientation of the disc plane and the anglesψandξ. (B) The angleξand its projection onto the picture plane (ξa) in a case that the disc is captured out
of the center of the image. H and V: horizontal and the direction closest to vertical, respectively, on the YʼZʼ plane.
Table 1. Specification of still cameras used for analysis.
Fig. 5. Graphical measurements for the captured top clinometer image.
For abbreviation of dimensions, see the text.
Measurement Unit On-shorelab.test Shinkai6500
Productname Canon SONYCyberShot
PowerShotA520 DSC-F717DensityofpictureelementonCCD px/mm 400 300
Focallengthwide-end mm 5.81 9.7tele-end mm 23.19 48.5Pictureresolutionwidth px 2272 2560height px 1704 1920
H. Ueda
5JAMSTEC Rep. Res. Dev., Volume 14, March 2012, 1_15

commercial or freeware (e.g. Adobe Photoshop, Paint.NET).
(1) The position of the disc center in the still camera
image (Cx and Cy in Fig. 5) is read along with the common graphic
x-y coordinate (originated from the upper left corner) by the
number-of-pixel unit (px). Right direction is positive for the x
axis, and downward positive for the y axis. In common retouch
software, the position data corresponding to the Cx and Cy
values are displayed on an information window or in a status bar
when the mouse cursor is placed on the disc center on the image.
(2) The apparent long diameter of the disc in the image is
measured as a combination of x- and y- projections (Dx and Dy in
Fig. 5: non-directional) by the px unit. When the mouse cursor is
dragged from one end to the other end of the apparent long
diameter in a selection mode, the software displays a selection
box, the diagonal of which connects the two end points. The
number of pixels for width and height of the selection box
equivalent to Dx and Dy, respectively, are displayed in a software
window. When the disc is pictured near-circular (i.e. with small
ψ), it is difficult to find its long axis precisely. In such cases, the
line can be set approximately normal to the pictured central
vertical bar. The long diameter does not need to be found exactly.
These values are used only to determine ri, and the final results
(strike and dip values) are not so sensitive to this parameter.
(3) Apparent tilt angles of the central vertical bar are
measured as its tangents onto x- and y- axes (Tx and Ty in Fig. 5)
by the px unit. When the mouse cursor is dragged from any point
to another point along with the side margin of the bar, the width
and the height of the dragged line (displayed as a selection box)
representing the Tx and Ty values are displayed by the px basis.
These values are directional: the analyzing program described
later adopts a coordinate in which right-hand positive for Tx and
upward positive for Ty originated from the point nearer to the disc
center.
(4) Find the point on the image where bar and disc scales
overlap (Fig. 5), and measure distances of this apparent point on
the bar and on the disc from the disc center, reading bar and disc
graduations (b and c, respectively: by the unit of centimeter).
These values can be measured the first decimal place by eye when
there is no overlapped point of the disc and bar scales.
(5) All the calculations and corrections, as well as
calibrations discussed later, were coded by the Microsoft Visual
Basic for Application (VBA) with a worksheet as the input/output
interface, both packaged in a Microsoft Excel 2003 file. This
package is available on the web site (http://www5b.biglobe.ne.
jp/~ueta/tools/uedax.xls), or can be e-mailed by the author on
request.
5. Quality of analysis
5.1. MethodApplicability of the method and data quality were
examined by laboratory and virtual tests. In the laboratory tests, a
compact digital camera (Canon PowerShot A520: Table 1) was
horizontally mounted on a tripod facing to the magnetic south. An
acryl top clinometer without steel backing and handle was
mounted on another aluminum tripod, and placed ~1.4 m distant
from the camera. Elevation of the disc center was set on the same
level as the camera lens center.
5.2. Estimation of the distance do
Fig. 6 shows the relationship of manually measured (by
tape) and graphically analyzed distance of the disc center from the
cameras. Although do is defined as the distance between the disc
center and the principal point of the camera lens, it is difficult to
know and measure the exact position of the latter principal point
in cameras. Consequently, the actual distance was measured from
the outer margin of the lens. For wide-angle pictures, the analyzed
distances are in good agreement with the measured values.
Analyses from telescopic pictures tend to yield values 10-15 cm
longer than the actual distances. A difference of 15 cm in the do
value results in a 0.4° difference in the angleψ , when the actual
distance is 150 cm (as a typical distance for practical
measurements using Shinkai 6500). The reason for differing
results by focal length remains unknown. However, this error will
not seriously affect the results, when the small effect on the angle
ψ is taken into account.
5.3. CenteringManually measured and graphically analyzed angles
between the camera (image) and the disc centers were compared
to evaluate the accuracy of the centering correction. The disc
center was initially set at the exact center of the camera view, and
was then moved laterally in a stepwise manner. These
displacements were manually measured to estimate the “measured
angle from camera center”, together with initial distance of the
disc from the camera. In graphical analysis, each lateral
displacement of the disc center from its initial position was
estimated by its simple proportional relationship with the disc
radius, and the distance from camera lens was analyzed as do. The
ratio of the two distances gives the sine of the analyzed angle. The
results of this laboratory test with wide-angle photographs are
given in Fig. 7. The analyzed and measured angles were nearly
identical, with differences less than 0.5°. Although accuracy of
Geological clinometer for submersibles
6 JAMSTEC Rep. Res. Dev., Volume 14, March 2012, 1_15

the centering correction might depend on lens specification, this
test implies minimal errors of centering angles.
5.4. The angleψTheoretical increments (∆ψ) of the angleψread by the
bar and disc scales (both of 12 graduations) are shown in Fig. 8A.
Increments among 145 possible pairs of the bar-disc scales are not
unique. When the disc is close to the horizontal or vertical, i.e. the
intervals from (b, c) = (0, 12) to (1, 12) and from (12, 0) to (12, 1),
the increment ∆ψis as large as 4-5°. In the remaining range, ∆ψ
values are less than 2.5°. Fig. 8B shows the estimated probabilities
of increments as occupation among the range of 0-90°. Except
for the two large increments close to the horizontal and vertical,
about 95% of the increments are less than 2°. This value is regarded
as the general resolution of the bar-disc scales with 12
graduations. Better resolution can practically be obtained by
reading values of either the bar or the disc to the first decimal
place by eye, even in the intervals of worse resolution, i.e. when
exact overlaps of the integer scales are not found.
The accuracy ofψwas tested in the laboratory by
photographing the variously inclined top clinometer with a
horizontal rotation (Yʼ-) axis normal to the sight line (i.e.ξ is
fixed as 0° ). The top clinometer was photographed at the
approximate center of each picture, and further processed using
the centering correction. In this “dip test”, all dip angles of the disc
are equal to 90° -ψ, and their errors are thus regarded as equivalents
to empirical errors ofψanalysis. Dips of the disc were measured
using a hand clinometer of 1° graduation, and some of the bar-
disc scales were read to the millimeter-scale by eye. This dip test
resulted (Fig. 9) in an excellent 1:1 linear correlation between the
measured and analyzed dips (the correlation coefficient r > 0.99
both for wide-angle and telescopic tests). Errors (2σ ) of the
difference in these measured and analyzed dip values were 0.7°
for wide-angle and 0.4° for the telescopic analyses. To take the
resolution of the hand clinometer into account, these results
suggest that in practice the bar-disc scale method reads the angle
ψas accurately as the hand magnetic clinometer.
5.5. The angle ξBecause the Tx and Ty values obtained from digital images
are integers, increments (∆ξ) exist to determine the angleξ. Fig.
10A shows calculated ∆ξvalues for every given length (lb in px
equivalent) of the measurable part of the bar image. Theoretical Tx
and Ty are given as integer pairs (x, y) nearest to the circle trace of
radius lb, and each neighboring pair provides ∆ξ . The increment
∆ξdepends on the imaged bar length lb, which is a function of
0 10 20 300
10
20
30
Measured angle from camera center (deg)
Analy
zed a
ngle
from
came
ra ce
nter (
deg) 1:1
100 150 200 250 300100
150
200
250
300
6k test (T)6k test (W)Labo. test (T)
Labo. test (W)
Measured distance do (cm)
Analy
zed d
istan
ce do (
cm)
1:1
Fig. 7. A relationship between manually measured and graphically
analyzed centering angles (between the image and disc centers) by a
laboratory test with wide-angle photographs.
Fig. 6. Relationships between manually measured and graphically
analyzed distances do. T: telescopic, and W: wide-angle. In 6k test,
Shinkai 6500 still camera captured the top clinometer placed on the R/V
Yokosuka deck. For laboratory test, see the text.
H. Ueda
7JAMSTEC Rep. Res. Dev., Volume 14, March 2012, 1_15

distance do, focal length f, and the angleψ . Expected maximum
∆ξvalues (∆ξmax) versus the angleψfor the typical distance do
of 1.5 m and the measurable part of the bar (10 cm), are shown in
Fig. 10B. The ∆ξmax values increase asψapproaches to 0 °.
However, differences of the angleξare less effective on that of
the resultant surface orientation whenψ is small. Therefore, the
effective maximum increment (∆ξmaxsinψ : Fig. 10C) is almost
insensitive to the angle ψ , and is as low as 0.5°, or even less if
wide-angle images are used. These tests suggest that measurement
error for the angleξ is small compared to the other parameters.
Telescopic pictures will provide better results, but wide-angle
images can still be used to determine theξvalues.
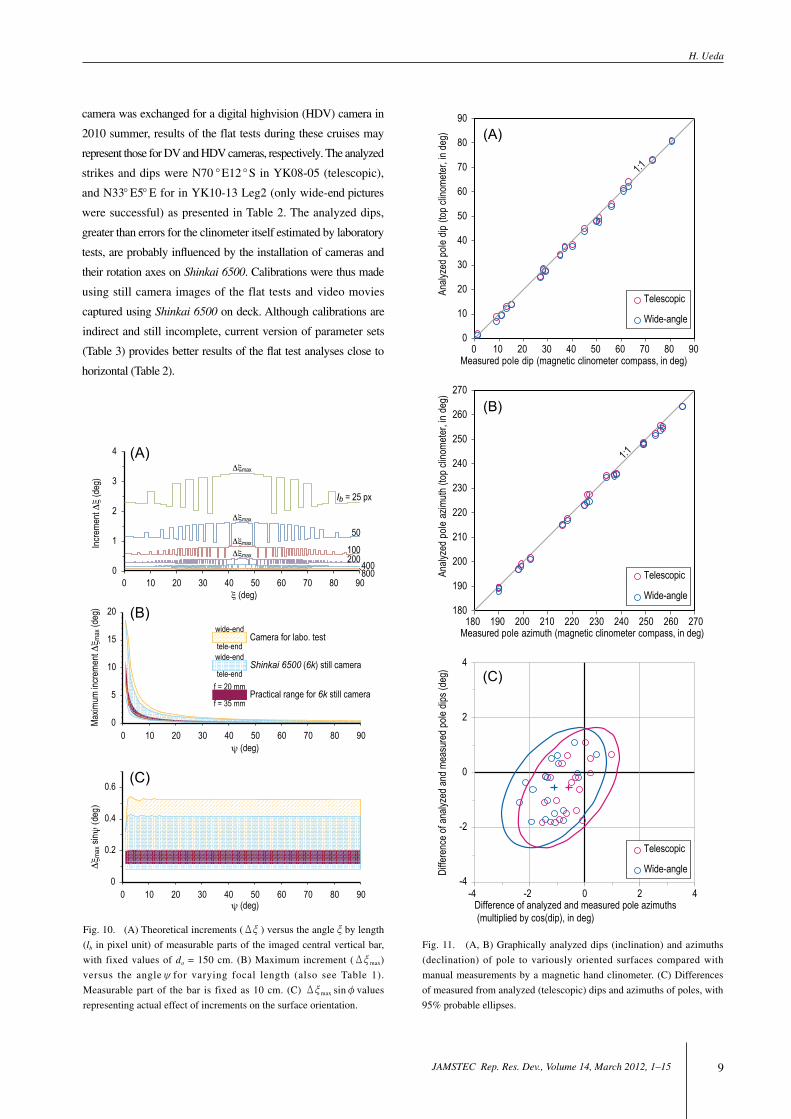
5.6. Empirical error of analysis by laboratory testNineteen measurements were made in laboratory tests
capturing images of the top clinometer in varying orientation.
Figs. 11A-B show near 1:1 correlations between manual
measurements by hand magnetic clinometer and graphically
analyzed results from the top clinometer, on dip (inclination) and
azimuth (declination) of pole orientation. Fig. 11C plots
differences between manual measurements and graphical analysis.
Because the accuracy of azimuths depends on correspondent dip,
each difference of azimuths is multiplied by the cosine of
measured dip in this figure to represent the actual effect on the
pole orientation. The 95% probability ellipse for telescopic image
analyses is narrower than that for wide-angle, and the former thus
provides better results. Systematic errors represented by ca. 0.8
and 1.2° shifts of the mean points from the origin for telescopic
and wide-angle analyses, respectively, perhaps resulted from
instrumental errors of the magnetic or top clinometers and/or of
laboratory settings. The long radii of the 95% probable ellipses
were 2.5° for both telescopic and wide-angle analysis, and this can
be regarded as the empirical precision of this test. Because this
value contains errors for the magnetic clinometer, errors of the top
clinometer alone cannot be evaluated in this test. However, it is
probable that accidental errors for the top clinometer itself are less
than ± 2.5° .
6. Calibration for Shinkai 6500
6.1. Flat testDuring the YK08-05 and YK10-13 Leg2 cruises, simple
onboard tests (“flat test”) were made using Shinkai 6500 in R/V
Yokosuka dock. The flat test checks whether the top clinometer
horizontally oriented relative to Shinkai 6500 can be analyzed as
to be horizontal or not. The clinometer was directly placed on the
deck in front of Shinkai 6500 settled on the truck frame, and was
photographed using its still camera. Heading of Shinkai 6500 was
virtually input as 180°. Because the No.2 digital video (DV)
0
10
20
30
40
50
60
70
80
90
0 10 20 30 40 50 60 70 80 90
Analy
zed d
ip (d
eg)
Measured dip (deg)
Wide-angleTelescopic
1:1
Fig. 9. Relationships between manually measured and graphically
analyzed dips in a laboratory “dip test”, when Yʼ axis was fixed
horizontal (ξ= 0°).
0
1
2
3
4
5
6
0 10 20 30 40 50 60 70 80 90Angle between bar and camera center line (ψ deg)
0
20
40
60
80
100
0
10
20
30
40
50
0 1 2 3 4 5
Cumu
lative
prob
abilit
y (%
)
Prob
abilit
y (%
)
Increment of ψ by bar-disc scales (Δψ deg)
Near-horizontal
Near-vertical
Incre
ment
of ψ
by ba
r-disc
scale
s (Δψ
deg)
Fig. 8. Theoretical increments (Δψ) of the angleψ, with twelve
graduations for the bar and disc scales. (A) Distribution of increments
with varying values. (B) Probability (occupation) of increments in the
range of 0-90°.
Geological clinometer for submersibles
8 JAMSTEC Rep. Res. Dev., Volume 14, March 2012, 1_15
camera was exchanged for a digital highvision (HDV) camera in
2010 summer, results of the flat tests during these cruises may
represent those for DV and HDV cameras, respectively. The analyzed
strikes and dips were N70 °E12°S in YK08-05 (telescopic),
and N33° E5° E for in YK10-13 Leg2 (only wide-end pictures
were successful) as presented in Table 2. The analyzed dips,
greater than errors for the clinometer itself estimated by laboratory
tests, are probably influenced by the installation of cameras and
their rotation axes on Shinkai 6500. Calibrations were thus made
using still camera images of the flat tests and video movies
captured using Shinkai 6500 on deck. Although calibrations are
indirect and still incomplete, current version of parameter sets
(Table 3) provides better results of the flat test analyses close to
horizontal (Table 2).
0
1
2
3
4
0 10 20 30 40 50 60 70 80 90
Incre
ment
Δξ
(deg
)
ξ (deg)
ψ (deg)
ψ (deg)
lb = 25 px
50
100200400
800
0
5
10
15
20
0 10 20 30 40 50 60 70 80 90
Maxim
um in
crem
ent Δ
ξ max
(deg
)
Δξmax
Δξmax
Δξmax
Δξmax
Camera for labo. testwide-end
tele-endwide-end
tele-endf = 20 mm
f = 35 mm
Shinkai 6500 (6k) still camera
Practical range for 6k still camera
(A)
(B)
(C)
0
0.2
0.4
0.6
0 10 20 30 40 50 60 70 80 90
Δξ m
ax si
nψ (
deg)
-4
-2
0
2
4
-4 -2 0 2 4Difference of analyzed and measured pole azimuths (multiplied by cos(dip), in deg)
Diffe
renc
e of a
nalyz
ed an
d mea
sure
d pole
dips
(deg
)
Telescopic
Wide-angle
Telescopic
Wide-angle
Telescopic
Wide-angle
0
10
20
30
40
50
60
70
80
90
0 10 20 30 40 50 60 70 80 90
Analy
zed p
ole d
ip (to
p clin
omete
r, in
deg)
Measured pole dip (magnetic clinometer compass, in deg)
1:1
180
190
200
210
220
230
240
250
260
270
180 190 200 210 220 230 240 250 260 270
Analy
zed
pole
azim
uth (t
op cl
inome
ter, in
deg)
Measured pole azimuth (magnetic clinometer compass, in deg)
1:1
(A)
(B)
(C)
Fig. 10. (A) Theoretical increments (Δξ) versus the angleξby length
(lb in pixel unit) of measurable parts of the imaged central vertical bar,
with fixed values of do = 150 cm. (B) Maximum increment (Δξmax)
versus the angleψfor varying focal length (also see Table 1).
Measurable part of the bar is fixed as 10 cm. (C) Δξmax sinφvalues
representing actual effect of increments on the surface orientation.
Fig. 11. (A, B) Graphically analyzed dips (inclination) and azimuths
(declination) of pole to variously oriented surfaces compared with
manual measurements by a magnetic hand clinometer. (C) Differences
of measured from analyzed (telescopic) dips and azimuths of poles, with
95% probable ellipses.
H. Ueda
9JAMSTEC Rep. Res. Dev., Volume 14, March 2012, 1_15
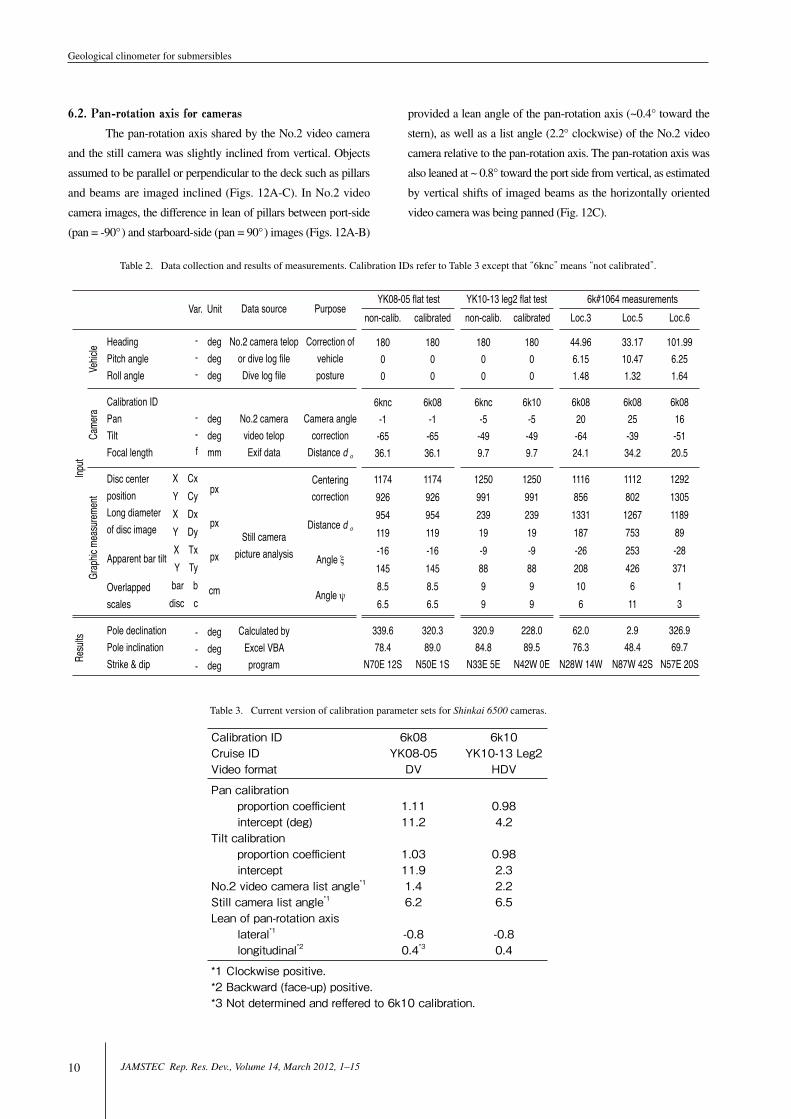
6.2. Pan-rotation axis for camerasThe pan-rotation axis shared by the No.2 video camera
and the still camera was slightly inclined from vertical. Objects
assumed to be parallel or perpendicular to the deck such as pillars
and beams are imaged inclined (Figs. 12A-C). In No.2 video
camera images, the difference in lean of pillars between port-side
(pan = -90°) and starboard-side (pan = 90°) images (Figs. 12A-B)
provided a lean angle of the pan-rotation axis (~0.4° toward the
stern), as well as a list angle (2.2° clockwise) of the No.2 video
camera relative to the pan-rotation axis. The pan-rotation axis was
also leaned at ~ 0.8° toward the port side from vertical, as estimated
by vertical shifts of imaged beams as the horizontally oriented
video camera was being panned (Fig. 12C).
Table 3. Current version of calibration parameter sets for Shinkai 6500 cameras.
CalibrationID 6k08 6k10CruiseID YK08-05 YK10-13Leg2Videoformat DV HDV
Pancalibrationproportioncoefficient 1.11 0.98intercept(deg) 11.2 4.2Tiltcalibrationproportioncoefficient 1.03 0.98intercept 11.9 2.3No.2videocameralistangle*1 1.4 2.2Stillcameralistangle*1 6.2 6.5Leanofpan-rotationaxislateral*1 -0.8 -0.8longitudinal*2 0.4*3 0.4
*1Clockwisepositive.*2Backward(face-up)positive.*3Notdeterminedandrefferedto6k10calibration.
UnitVar.
Input
Resu
ltsVe
hicle
Came
raGr
aphic
mea
surem
ent
HeadingPitch angleRoll angle Calibration IDPanTiltFocal length Disc centerpositionLong diameterof disc image Apparent bar tilt Overlappedscales Pole declinationPole inclinationStrike & dip
---
--f
X CxY CyX DxY DyX TxY Ty
bar bdisc c
---
degdegdeg
degdegmm
px
px
px
cm
degdegdeg
No.2 camera telopor dive log fileDive log file
No.2 cameravideo telopExif data
Still camerapicture analysis
Calculated by
Excel VBAprogram
Correction ofvehicleposture
Camera anglecorrection
Distance d o
Centeringcorrection
Distance d o
Angle ξ
Angle ψ
non-calib. 180
00
6knc-1-6536.1
1174926954119-161458.56.5
339.678.4
N70E 12S
calibrated 180
00
6k08-1-6536.1
1174926954119-161458.56.5
320.389.0
N50E 1S
non-calib. 180
00
6knc-5-499.7
125099123919-98899
320.984.8
N33E 5E
calibrated 180
00
6k10-5-499.7
125099123919-98899
228.089.5
N42W 0E
Loc.3 44.966.151.48
6k0820-6424.1
11168561331187-26208106
62.076.3
N28W 14W
Loc.5 33.1710.471.32
6k0825-3934.2
11128021267753253426
611
2.948.4
N87W 42S
Loc.6 101.99
6.251.64
6k0816-5120.5
12921305118989-28371
13
326.969.7
N57E 20S
Data source PurposeYK08-05 flat test YK10-13 leg2 flat test 6k#1064 measurements
Table 2. Data collection and results of measurements. Calibration IDs refer to Table 3 except that “6knc” means “not calibrated”.
Geological clinometer for submersibles
10 JAMSTEC Rep. Res. Dev., Volume 14, March 2012, 1_15

6.3. Still camera installationThe central vertical bar was imaged as nearly vertical by
the No.2 video camera, whereas leaned toward the left-hand side
at 5.4° and 5.7° in the flat test photographs of YK08-05 and
YK10-13, respectively (Fig. 12D). To take the 0.8° lean of the pan-
rotation axis into account, the still camera is presumably installed
listing clockwise by 6.2° and 6.5° clockwise, respectively, relative
to the pan-rotation axis (Table 3).
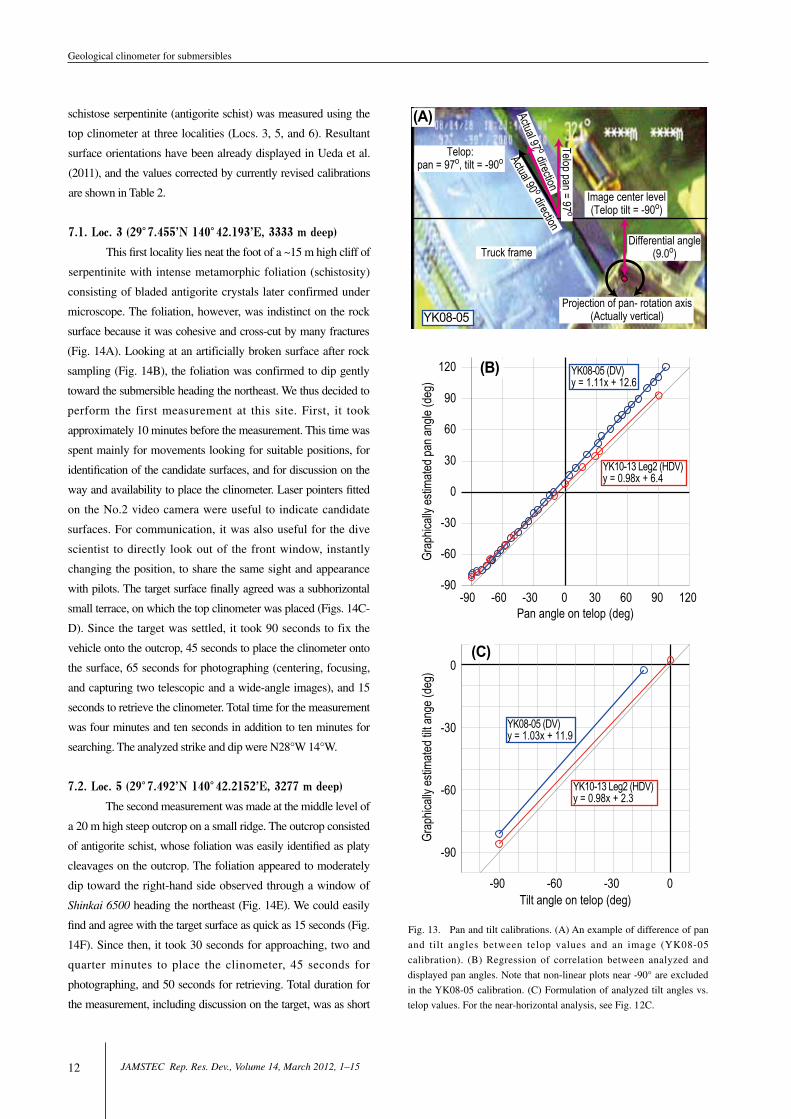
6.4. Pan and tilt telopsPan angles displayed in video telops were inconsistent
with the inclination of imaged truck frames captured by the
vertically tilted video camera (Fig. 13A). The actual pan angle
assumed from the track frame images are in linear correlations
with correspondent telop values (Fig. 13B), and the correlations
for DV and HDV cameras differ. The installation angles of the
No.2 video camera relative to the pan-rotation axis (1.4° for
YK08-05 and 2.2° for YK10-13 leg2) were subtracted from the
intercepts of the regression formulae to determine the calibration
parameters (Table 3).
Tilt angles were also calibrated in a less accurate but
similar way. The actual vertical direction can be assumed referring
to the projection of the image rotation axis in panned movies
captured by the No.2 video camera facing downward. When the
telop indicates just -90°, the actual tilt angle is estimated by the
differential angle between levels of the image center and the
image rotation axis (Fig. 13A). In near-horizontal images, the
actual horizontal level can be estimated by perspective view
analyses of imaged beams (Fig. 12C). Whereas an apparent
horizontal level based on the telop value is placed at the image
center (or shifted if the telop value is not zero). The differential
angles between the image center level and the estimated horizontal
level provide another constraint. Based on these two controls,
linear formulae were constructed to assume the actual tilt angle
for every given telop value (Fig. 13C).
7. Practical measurements by Shinkai 6500
During 6K#1064 dive (pilot: K. Matsumoto, copilot: K.
Chiba, and scientist: H. Ueda) of the YK08-05 cruise in the
Ohmachi Seamount (Izu-Bonin arc), metamorphic foliation of
2.6o
1.8o
(A)
(B)
(C)
Pan = -90o
Pan = +90o Pan = 0o
Pan-rotation plane
Camera horizontal planeActual horizontal plane(at camera center level)
Difference of telop and actual horizons (2.3o)
Image center
True vertical
Camera horizontal plane
True horizontal plane
-0.8 o
-0.8o Pan-rotation planePan-rotation axis 2.2o: Video camera installation
1.4o
ahead
Camera vertical (+90 o)
True verticalPan axis
2.6o0.4o
Video camerainstallation
2.2o
-1.8o0.4o
Camera vertical (-90 o)
True vertical
Pan axis
Video camerainstallation
2.2oahead
5.7o (D)
No.2 video cameraStill camera
Fig. 12. Calibration for installation of cameras and the pan rotation axis of Shinkai 6500 during YK10-13 Leg2. (A and B): Video clips of lateral
horizontal views by the No.2 video camera (HDV). Insets (with exaggerated angles) are interpretations for leaning of imaged pillars. (C) A frontal and
horizontal view from the No.2 video camera. The pan rotation plane was determined by a vertical shift of an imaged beam in a horizontally panning
movie. Inset shows interpretation of inclination (exaggerated) of the imaged beam and the pan rotation plane. (D) Leaning of the imaged central vertical
bar of the top clinometer on deck captured by the still camera (left) and No.2 video camera (right). In both the images, the clinometer was captured at the
approximate center of the pictures.
H. Ueda
11JAMSTEC Rep. Res. Dev., Volume 14, March 2012, 1_15
schistose serpentinite (antigorite schist) was measured using the
top clinometer at three localities (Locs. 3, 5, and 6). Resultant
surface orientations have been already displayed in Ueda et al.
(2011), and the values corrected by currently revised calibrations
are shown in Table 2.
7.1. Loc. 3 (29°7.455’N 140°42.193’E, 3333 m deep)This first locality lies neat the foot of a ~15 m high cliff of
serpentinite with intense metamorphic foliation (schistosity)
consisting of bladed antigorite crystals later confirmed under
microscope. The foliation, however, was indistinct on the rock
surface because it was cohesive and cross-cut by many fractures
(Fig. 14A). Looking at an artificially broken surface after rock
sampling (Fig. 14B), the foliation was confirmed to dip gently
toward the submersible heading the northeast. We thus decided to
perform the first measurement at this site. First, it took
approximately 10 minutes before the measurement. This time was
spent mainly for movements looking for suitable positions, for
identification of the candidate surfaces, and for discussion on the
way and availability to place the clinometer. Laser pointers fitted
on the No.2 video camera were useful to indicate candidate
surfaces. For communication, it was also useful for the dive
scientist to directly look out of the front window, instantly
changing the position, to share the same sight and appearance
with pilots. The target surface finally agreed was a subhorizontal
small terrace, on which the top clinometer was placed (Figs. 14C-
D). Since the target was settled, it took 90 seconds to fix the
vehicle onto the outcrop, 45 seconds to place the clinometer onto
the surface, 65 seconds for photographing (centering, focusing,
and capturing two telescopic and a wide-angle images), and 15
seconds to retrieve the clinometer. Total time for the measurement
was four minutes and ten seconds in addition to ten minutes for
searching. The analyzed strike and dip were N28°W 14°W.
7.2. Loc. 5 (29°7.492’N 140°42.2152’E, 3277 m deep)The second measurement was made at the middle level of
a 20 m high steep outcrop on a small ridge. The outcrop consisted
of antigorite schist, whose foliation was easily identified as platy
cleavages on the outcrop. The foliation appeared to moderately
dip toward the right-hand side observed through a window of
Shinkai 6500 heading the northeast (Fig. 14E). We could easily
find and agree with the target surface as quick as 15 seconds (Fig.
14F). Since then, it took 30 seconds for approaching, two and
quarter minutes to place the clinometer, 45 seconds for
photographing, and 50 seconds for retrieving. Total duration for
the measurement, including discussion on the target, was as short
-90
-60
-30
0
30
60
90
120
-90 -60 -30 0 30 60 90 120
Grap
hicall
y esti
mated
pan a
ngle
(deg
)
Pan angle on telop (deg)
-90
-60
-30
0
-90 -60 -30 0
Grap
hicall
y esti
mated
tilt a
nge (
deg)
Tilt angle on telop (deg)
YK10-13 Leg2 (HDV)y = 0.98x + 2.3
YK10-13 Leg2 (HDV)y = 0.98x + 6.4
YK08-05 (DV)y = 1.03x + 11.9
YK08-05 (DV)y = 1.11x + 12.6
(B)
(C)
Image center level(Telop tilt = -90o)
Truck frame
Telop:pan = 97o, tilt = -90o
Differential angle(9.0o)
(A)
YK08-05
Actual 90 o direction
Actual 97 o direction Telop pan = 97 o
Projection of pan- rotation axis(Actually vertical)
Fig. 13. Pan and tilt calibrations. (A) An example of difference of pan
and tilt angles between telop values and an image (YK08-05
calibration). (B) Regression of correlation between analyzed and
displayed pan angles. Note that non-linear plots near -90° are excluded
in the YK08-05 calibration. (C) Formulation of analyzed tilt angles vs.
telop values. For the near-horizontal analysis, see Fig. 12C.
Geological clinometer for submersibles
12 JAMSTEC Rep. Res. Dev., Volume 14, March 2012, 1_15

as five minutes. The resultant strike and dip were analyzed as
N87°W 42°S.
7.3. Loc. 6 (29°7.4097’N 140°42.3217’E, 3259 m deep)This locality is one of the outcrops sporadically exposed
on a steep slope. The outcrop was a 4-5 m high cliff surrounded
by talus deposits. Foliation was partly obvious and appeared
gently dipping beyond and righthand side observed from the
submersible heading the east. It was, however, crosscut by many
vertical joints (Fig. 14G). Some of foliation planes and joints were
open, and the rock was loose and fragile. The orientation of the
foliation could thus be modified by creep movements, and caution
must be paid for geological interpretation of the result. However,
it does not matter to test the methodology.
In this measurement, the operator placed the top
clinometer so as to extend a platy foliation without any direction
by the scientist (Fig. 14H). It took two and half minutes, including
a time for approaching to the outcrop. Then, it took one minute for
checking and acceptance by the scientist, one minute and ten
seconds for photographing, and 35 seconds for retrieving. Totally,
the measurement was completed for five minutes and ten seconds.
Because of light scattering owing to stirred mud, the obtained
image were overexposed (Fig. 14H). Graphic retouching
fortunately enabled to read bar and disc scales (Fig. 14I).
(A)
Loc. 3 Loc. 3
(C)
Loc. 5
(E)
Loc. 5
(F)
Loc. 6
(H)(G)
Loc. 6 Loc. 6
Loc. 3
(D)
Loc. 3
(B)
(I)
Fig. 14. Outcrop features and measurements of serpentinite foliation using the top clinometer during 6K#1064 dive in YK08-05 cruise. (A-D) Loc. 3: (A)
Blocky rock surfaces with indistinct foliation. Measured part is on the right extension of the picture. (B) Pale foliation surface appeared on an artificially
broken part after sampling (arrow). Measured part is ~1 m above the picture. (C): Captured No.2 video image at the measurement. (D) Close-up still
camera picture used for analysis. Black arrow indicates the bar-disc scale overlap, and yellow arrows indicate fractures along with foliation planes. (E and
F) Loc. 5: (E) Distinctly foliated rock surface. Measurement was made on the lower-left extension of this picture. (F) Captured No.2 video image at the
measurement. For correspondent still camera view, see Fig. 5. (G-I) Loc. 6: (G) Fractured rock surfaces with foliation crosscut by vertical joints.
Measurement point is on the upper-right extension of this picture. (G) Captured No.2 video image of the measurement against loose foliation planes. (H)
The close-up picture of the measurement, with retouched version as inset. The accepted bar-disc scale overlap is shown by arrows.
H. Ueda
13JAMSTEC Rep. Res. Dev., Volume 14, March 2012, 1_15

8. Availability and problems
As noted in the section of introduction, a clinometer for
deep-sea measurements requires (1) resistance to water pressure,
(2) swiftness of operation, (3) simple and safe, and (4) minimal
size and weight, in addition to general requirement of (5) cost and
(6) data reliability. Among these, the top clinometer evidently
satisfies (1) resistance, (3) safety, (4) size and weight, and (5) cost.
Theoretical and laboratory tests evaluated that the top
clinometer itself can measure as precise as magnetic clinometer
compasses commonly used on-land. It also has an advantage of
independence from magnetic fields, which can be affected by the
submersible and strongly magnetized rocks. However, its data
reliability depends significantly on camera installation on
submersibles. The present calibration parameters were determined
by indirect and inferable information such as assumingly vertical
and horizontal objects in pictures. Although they seemingly
provided valid results by on-deck flat test, the examined
orientation was very limited (unity) and thus may not be sufficient
for the multi-parameter calibration. More directly measured
parameters and examination on more variously oriented top
clinometer will improve its reliability. In addition, cameras and
their rotation axes equipped on the submersible Shinkai 6500 are
removed and re-installed at every (mainly annual) opportunity of
maintenance in dock. Therefore, it is preferable to calibrate and to
perform on-deck test at least once in every year.
The time necessary for a measurement was as short as
five minutes. And there has been no technical problem of
operation. The measurement itself is thus evaluated to be simple
and quick enough. However, the actual time could be much
expended to look for a target surface and to communicate about
position and the way to place the clinometer. It is important for a
dive scientist to choose sites with simple and easy surfaces, as
possible, for operators to recognize and to place the clinometer.
So far there are two major problems to be improved in
future. First, the top clinometer of the current version tends to be
pictured with overexposure, especially at flat test on deck and at
seafloor when water is stirred with mud. It probably owes to
coloring of the current top clinometer: white and yellow parts of
the disc and bar, respectively, might be sometimes too bright
compared to backgrounds, or scattered light could enhance
brightness of these parts, which may not be concerned by the
exposure meter. Graphical retouching can overcome this problem
in fortunate cases (Figs. 14H and 14I). However, extreme
overexposure disables to correctly read the disc-bar scales:
brightly colored graduations invade dark-colored ones. Therefore,
reexamination of coloring is necessary for stably successful
measurements. Second, the central vertical bar can be stuck in the
sample basket and bent out of vertical. The bar is easily replaced
with a spare on deck. However, when it happens on seafloor, it
will be difficult to continue valid measurements during the rest
time of the dive. Hence, mechanical improvements increasing
toughness or protecting the bar is also necessary.
Finally I note that the top clinometer is available on
request.
Acknowledgments
This work arose from discussions with Drs. K. Kizaki and
T. Shimura, who had ideas of universal magnetic clinometers of
very easy use. Mr. T. Yoshiume kindly provided basic information
on camera specifications and installations on the submersible
Shinkai 6500, based on which the current idea of the clinometer
developed and realized. Laboratory tests were accomplished by
assistance of Mr. T. Saito. The clinometer would not reach to the
level of practical use without on-deck manufacturing by the
Shinkai 6500 operation team during YK08-05 cruise. Pilots and
dive scientists of YK08-05, YK10-04, and YK10-13 Leg2 all
equipped it at their dives, and Drs. K. Hirauchi, M. Meschede, and
K. Tani made measurements in their dives. These precious
experiences were not described in the text but implicitly
contributed to confirm its availability. Dr. B. P. Roser kindly made
corrections on language. Peer reviews by Drs. R. Anma and K.
Kawamura and editorial reviews by Dr. T. Miyazaki significantly
improved the manuscript. This work was financially supported by
JSPS Grant-in-Aid no. 22540464. I appreciate these persons and
organizations.
References
Anma, R., Y. Ogawa, K. Kawamura, G. Moore, T. Sasaki, S.
Kawakami, S. Hirano, T. Ota, R. Endo Y. Michiguchi,
and YK05-08 Shipboard Science Party (2010), Structure,
texture, and physical properties of accretionary prism
sediments and fluid flow near the splay fault zone in the
Nankai Trough, off Kii Peninsula. J. Geol. Soc. Japan,
116, 637-660.
Cogné, J. P., J. Francheteau, V. Courtillot and Pito93 Scientific
Team (1995), Large rotation of the Easter microplate as
evidenced by oriented paleomagnetic samples from the
Geological clinometer for submersibles
14 JAMSTEC Rep. Res. Dev., Volume 14, March 2012, 1_15

ocean floor. Earth Planet. Sci. Lett., 136, 213-222.
Hurst, S. D., J. A. Karson, and K. L. Verosub (1994),
Paleomagnetic study of tilted diabase dikes in fastspread
oceanic crust exposed at Hess Deep. Tectonics, 13, 789-
802.
Karson, J. A., G. L. Früh-Green, D. S. Kelley, E. A. Williams, D.
R. Yoerger, and M. Jakuba (2006), Detachment shear
zone of the Atlantis Massif core complex, Mid-Atlantic
Ridge, 30N. Geochem. Geophys. Geosyst., 7, Q06016,
doi:10.1029/2005GC001109.
Kocak, D. M., F. M. Caimi, P. S. Das, and J. A. Karson (1999),
A 3-D laser line scanner for outcrop scale studies of
seafloor features, Proceedings OCEANS '99 MTS/IEEE
“Riding the Crest into the 21st Century”, 3, 1105- 1114.
Lawrence, R. M., J. A. Karson and S. D. Hurst (1998), Dike
orientations, fault-block rotations, and the construction of
slow spreading oceanic crust at 22°40ʼN on the Mid-
Atlantic Ridge. J. Geophys. Res., 103, 663-676.
Ogawa, Y., K. Kobayashi, H. Hotta, and K. Fujioka (1997),
Tension cracks on the oceanward slopes of the northern
Japan and Mariana Trenches. Marine Geol., 141, 111-
123.
Ueda, H., K. Niida, T. Usuki, K. Hirauchi, M. Meschede, R.
Miura, Y. Ogawa, M. Yuasa, I. Sakamoto, T. Chiba, T.
Izumino, Y. Kuramoto, T. Azuma, T. Takeshita, T.
Imayama, Y. Miyajima, and T. Saito (2011), Seafloor
geology of the basement serpentinite body in the
Ohmachi Seamount (Izu-Bonin arc) as exhumed parts of
a subduction zone within the Philippine Sea, Ogawa, Y.,
R. Anma and Y. Dilek (eds.), Accretionary Prisms and
Convergent Margin Tectonics in the Northwest Pacific
Basin, Springer, 97-128.
H. Ueda
15JAMSTEC Rep. Res. Dev., Volume 14, March 2012, 1_15




![,5 :4,5 ] benzo[1,2 - Osmania Universityosmania.ac.in/Publications/2012Publications.pdf · 4 southern India: insights from in situ Sr-Nd isotopic analysis on apatite. Geological Society](https://img.pdfslide.net/doc/110x75/5a8400547f8b9aa5408b560f/5-45-benzo12-osmania-southern-india-insights-from-in-situ-sr-nd-isotopic.jpg)
























