Embed Size (px)
Citation preview

Search Methods in USAR
Literature Survey
Delft University of Technology Faculty of Electrical Engineering, Mathematics & Computer Science
Man‐Machine Interaction Group
Maarten van Zomeren September 2008
Search Methods in USAR 9/1/2008
1
Abstract Urban Search And Rescue teams are teams capable of rescuing victims entombed in collapsed buildings. The survival rate of these victims decreases rapidly. Three days after the collapse of the building is the chance they survive diminished to one third. So it pays to rescue the victims as efficiently as possible. This research tries to define research area’s where USAR teams can be helped with their search task with information technology. First one must know how these teams perform their search task in which environment. Once this is known it is possible to identify some problems and come up with ideas for improvement. After this some mathematical search methodologies are described that can be utilized in the USAR domain. During their search task USAR teams utilize technologies to find victims as deep as possible in the rubble. These technologies are: dogs, pole mounted cameras, microphones, bystander information, and sometimes robots. Every search technology is to augment different human senses.
• Dogs augment the sense of smell of a human and can find living victims; • Pole mounted camera’s let the searcher see at places which would normally not
been seen. For example, after a small hole is made the searcher can utilize this type of camera to see behind a slab of reinforced concrete.
• Microphones and seismic equipment is utilized to hear sound or detect vibrations a victim can make when the victim is conscious. The range of this equipment varies from 7 to 25 meters.
• Bystander information is utilized by the searchers to direct the search effort. Bystanders can provide information for example on whether there where sounds from a victim at a certain location.
• Robots are employed to bring sensors deeply in the rubble. A camera can be such a sensor. Robots are not a standard search method employed by USAR teams, but they saw action at the World Trade Center collapse.
Better perception inside the pile of rubble is needed, this can be obtained by a through the wall radar that can detect living victims through a wall of concrete with a thickness of 30 cm. It could be possible to improve the microphone and seismic equipments by noise reduction. Currently the worksite should be completely silent before this equipment can sense anything. A problem with the search with robots is that it is difficult to accurately pinpoint their position in the pile of rubble. So once a victim is found by the robots its location can still be unknown. This makes scientific effort to create a map from the inside and outside of the building needed. A digital map can also reduce the time needed for information to
Search Methods in USAR 9/1/2008
2
travel to the decision makers, which often took 12 hours at the World Trade Center collapse.
Search Methods in USAR 9/1/2008
3
Acknowledgements It is my pleasure to thank a lot of people who made this thesis directly or indirectly possible. People who I might have forgotten will be offered a drink in the pub. Of course there is my mentor Stijn Oomes to thank. He has lots of advice that I most often take. I’m sorry for the times I didn’t take it. Thanks for the times you invite me and your other students for the MMI department fun days. And thanks for the countless times you’ve read this thesis. I’m also very grateful for the opportunity to go to the USAR.NL exercise. Dear Tjerk, the Orloff was great. Thanks for the times we where programming together it was fun. But I’m most grateful for the time you took to read this thesis and help me structure it a bit further. Hopefully you can use it with your publications. I would also like to thank you for your effort to make our visit to the USAR.NL visit possible. Nike, there is something with six years… But I would like to thank you for the photo’s you took at the exercise they were pretty useful. As you can see I altered one for the first page of this report. I would like to thank the TNO part of the Collaboration at a Distance project for the cooperation. Prof. Robin R Murphy, we have not spoken a lot. But thanks a lot for the opportunity to visit your lab in Texas A & M University. I would also like to thank you for the little push in the correct direction at Amsterdam Central Station. Bart en Ruud incorporated thanks for the solutions for the question me and my fellow students like to bother you with. I would also like to thank all the students who are writing their theses’ in the same room for the wanted and unwanted distraction. It was fun most often. The interest in each other’s work provides opportunity to explain it to others. This improved the results. Thanks a lot for this opportunity. It was great to be on a trip to a exercise of the USAR.NL team. Thanks for the fun and the polite answers to all our questions. Hopefully I’ll be able to do something back after my research is done. A book won’t be enough to thank my parents.
Search Methods in USAR 9/1/2008
4
Thanks Esther, you really are a relaxation expert. That was just the thing I often needed, when I was relentlessly trying to write on. Thanks girl, I hope we’ll have lots of fun in the future.
Search Methods in USAR 9/1/2008
5
Table of Contents
ABSTRACT 1
ACKNOWLEDGEMENTS 3
TABLE OF CONTENTS 5
LIST OF ABBREVIATIONS 7
1 INTRODUCTION 8
2 CURRENT SEARCH METHODS 11
2.1 USAR 11 2.1.1 ACTORS DURING INTERNATIONAL AID 11 2.1.2 USAR IN GENERAL 13 2.1.3 TRIAGE 15 2.1.4 SEARCH METHODS AND EQUIPMENT 18 2.1.5 COORDINATION AND COMMUNICATION TOOLS 20 2.2 USAR.NL 21 2.2.1 PEOPLE AND ORGANIZATION 23 2.2.2 ON SITE WORKFLOW 24 2.2.3 DIFFERENCES TO INSARAG GUIDELINES 26 2.3 FIRE DEPARTMENT 27
3 BUILDING COLLAPSE PATTERNS 31
3.1 COLLAPSE PATTERNS 31 3.1.1 INCLINED LAYERS 33 3.1.2 PANCAKE COLLAPSES 34 3.1.3 DEBRIS HEAPS 35 3.1.4 OVERTURN COLLAPSES 36 3.1.5 OVERHANGING ELEMENTS 36 3.2 POSSIBLE VOIDS 37
4 USAR INFORMATION SOURCES 38
4.1 SITUATION AWARENESS 38 4.1.1 LEVEL 1 – PERCEPTION OF THE ELEMENTS IN THE ENVIRONMENT 38 4.1.2 LEVEL 2 – COMPREHENSION OF THE CURRENT SITUATION 39 4.1.3 LEVEL 3 – PROJECTION OF FUTURE STATUS 39 4.2 DOGS 39
Search Methods in USAR 9/1/2008
6
4.2.1 SCENT THEORY 40 4.3 POLE MOUNTED CAMERA 41 4.4 LISTEN / SEISMIC DEVICE 42 4.5 ROBOTS 43 4.5.1 DIFFERENT ROBOT TYPES 45 4.6 THROUGH WALL RADAR 47
5 THEORETICAL MODELS 48
5.1 FORAGING THEORY 48 5.1.1 FORAGING MODELS 48 5.1.2 DISCUSSION OF FORAGING THEORY 52 5.2 SEARCH AND RESCUE SEARCH THEORY 53 5.2.1 SENSOR INFORMATION 54 5.2.2 HOW WELL IS THE AREA SEARCHED? 55 5.2.3 OBJECT INFORMATION 56 5.2.4 SUCCESS MEASURE 56 5.2.5 DISCUSSION OF SEARCH THEORY FOR THE USAR DOMAIN 56
6 CONCLUSION 58
LIST OF FIGURES 60
LIST OF TABLES 61
WORKS CITED 62
Search Methods in USAR 9/1/2008
7
List of abbreviations COT Country Operational Team or in Dutch LOT, “Landelijk Operationeel
Team” CRASAR Center for Robot Assisted Search And Rescue DVI Disaster Victim Identification FEMA Federal Emergency Management Agency HRI Human Robot Interaction INSARAG International Search and Rescue Advisory Group IEC INSARAG External Classification LEMA Local Emergency Management Authority LOT Landelijk Operationeel Team MDT Mobile Data Terminal OCHA Office for the Coordination of Humanitarian Affairs OSOCC: On‐Site Operational Coordination Centre POA Probability of Area POC Probability of Containment POD Probability of Detection POS Probability of Success RAC Regional Alarm Emergency Room RAMR Robot‐Assisted Medical Reachback RDC Reception Departure Centre SA Situation Awareness SAR Search and Rescue UAV Unmanned Air Vehicle USAR.NL: Urban Search And Rescue – Netherlands USACE United States Army Corps of Engineers vatf1 Virginia Task Force 1. An USAR team from America. vOSOCC: Virtual On‐Site Operational Coordination Centre
Search Methods in USAR 9/1/2008
8
1 Introduction In about four hours a huge disaster will occur. A strong earthquake will strike the city, and some structures won’t withstand the force and will collapse. Large amounts of residents will be entombed in voids inside these collapsed structures. The entombed people need to be found and rescued. Since this is a task for highly trained and specialized people there are certain organizations that are able to do this. These teams are called Urban Search And Rescue Teams (USAR ‐ teams). The goal of this thesis is to investigate from the literature how these teams do their work. The emphasis will be on their search methods. Of course the above scenario has occurred a number of times in the past for example in Peru (OCHA 2007a) or after an attack at the world trade center (Casper and Murphy 2003). There is lots of research done to develop robots for the USAR domain. In this research there is a growing tendency to develop robots to solve problems USAR teams have. And not just make robots and apply them for USAR purposes. An example of this is the development of Human Robot interface which makes a team of USAR experts able to use the robot as an information source and not only to be able to control the robot (Murphy and Burke 2005). This research fits in this paradigm and provides the reader with a domain analyses in the domain of USAR. Possible solutions however do not necessarily involve robots. The central question in this thesis is: “How is it possible to aid rescuers in the search task of the USAR domain?”. To be able to answer this question, there are three more questions to be answered:
• What is the current search method of USAR teams? • What are the problems USAR teams have to cope with while utilizing these
search methods? • Are there other search methods or techniques that can help with the search task
in the USAR domain? The questions are stated in such a way that it gives the opportunity for the author to find niches where more follow up research can be done to support USAR teams. This follow up research will be conducted under supervision of Dr. A.H.J. Oomes and Prof. Robin R. Murphy. The answer of these questions can be found in the literature. But it is really interesting to see the practice behind the theory. It really helps in writing a more accurate thesis. So apart from the basis in the theory, this thesis is also based on a field trip to a major exercise of USAR.NL. In preparation of this exercise there where two interviews with firemen, one of them is also a member of USAR.NL.
Search Methods in USAR 9/1/2008
9
rations
e
ent
ults is cts
ollapsed buildings are not the
ch nt in
Answering the questions stated above starts with a description of the environment the USAR teams are working in and how they relate to other organizations in the international humanitarian aid umbrella (OCHA 2006a). In the upper part of Figure 1‐1 this is pictured. When there are buildings collapsed the Local Emergency Management Authority (LEMA) asks for help to the international organization. There are a lot of organizations which can react to this question for aid. These organizations are coordinated by the United Nations Disaster Assessment and Coordination team (UNDAC team). USAR teams are organizations which can react to this kind of question for aid. USAR teams are then described in more detail. USAR teams should be working following guidelines proposed by the International Search and Rescue Advisory Group (INSARAG) (OCHA 2006b). These guidelines consist of five phases. The guidelines are theory. It helps to grasp the domain better by describing a team and its work process. The USAR.NL team is chosen for this thesis (Bovens et al. 2002). The USAR process consists of a number of phases. The search forvictims is done in the opephase. Three aspects during the operations phase are found important for this thesis. The process of triage, choosing wherto perform operations first is important because it can save lives. Secondly, how the team searches and what equipmthey use. Being able to coordinate and map the resthe third aspect. All three aspeare discussed in Chapter 2 Current search methods.
Figure 1-1Flow of report
Conly disasters that can happen. To give this thesis a more broad view there will also be a discussion about the searstrategy of the fire departmeChapter 2 (NIBRA 2002a; NIBRA 2002b). Another reason for doingthis is because the USAR community consists of peoplefrom different emergency response organizations. The fire

Search Methods in USAR 9/1/2008
10
SAR operations are performed in dangerous areas: collapsed buildings. These buildings
s.
rns
earching for these victims is done with certain equipment like pole mounted cameras
earch and rescue is also performed at sea, where a missing person can be floating in a
e
department is such an emergency response organization. Ucan be collapsed according to a certain pattern (Schweier and Markus 2004; Schweier and Markus 2006). These patterns are described in Chapter 3 Building Collapse PatternThe pattern through which the building is collapsed provides information on for example the time it takes to rescue a victim. On a much smaller scale these pattegive the opportunity to pinpoint spaces where a victim might be, called voids. Sor animals like dogs. Chapter 4 USAR Information sources provides the reader with a thorough description of these equipment and how they are used (Bovens et al. 2002; OCHA 2006b). Slarge area and needs to be rescued quickly. In this domain are mathematical methods developed to utilize the search equipment in such a way that the search is as effective as possible (Lang 2008). This search theory is introduced and there is a brief discussion how this theory can be used to search more efficiently in the USAR domain. In Chapter 5Theoretical models the same is done with foraging theory. This theory describes how animals forage in their habitat as efficiently as possible (Stephens and Krebs 1986). Todo this the animal must make decisions, which are similar to decisions USAR teams havto make during the triage process.
Search Methods in USAR 9/1/2008
11
2 Current search methods After a large earthquake with lots of demolished buildings an inflicted country could need help rescuing all the people trapped inside these buildings. The country will then place a request for international assistance trough the United Nations Office for the Coordination of Humanitarian Affairs (UN OCHA). Let‘s assume other countries come to assist the country which was hit. A team which can respond to the request is a team from the Netherlands, urban search and rescue Netherlands (USAR.NL) (2.2). They perform USAR operations according to certain guidelines (2.1). There are more teams, but this one will be examined in more detail. Collapsed buildings are not the only accidents that can happen. To give this thesis a more broad view there will also be a discussion about the search strategy of the fire department (2.3). Another reason for doing this is because the USAR community consist of people from different emergency response organizations. The fire department is such an emergency response organization.
2.1 USAR Urban Search and Rescue is the localization and rescue of humans or animals from underneath the rubble. This can be performed in a national setting with just one collapsed building, but often it is performed in an international setting with lots of cooperating agencies. It is important to get an idea what the responsibilities are of these agencies or organizations (2.1.1). A type of organization is a USAR team, the USAR process is divided into five different phases (2.1.2). The focus of this thesis is on how these separate USAR teams perform the actual search of victims in a collapsed building, this is part of the operations part of the USAR process. For searching it is interesting to know:
• how they decide where to search (perform triage) (2.1.3); • what search methods and equipment they use (2.1.4); • how they communicate their search results (2.1.5); • how they cope with danger;
The question “how they cope with danger” is a question that is important for all aspects of USAR. They are aware of dangers when they perform triage. They are aware of danger when they search on and especially in a building. So the question how they cope with danger will be answered while answering the other questions.
2.1.1 Actors during international aid When the international aid has commenced fully there will be a lot of organizations and teams cooperating in the country (OCHA 2006b). The organization in charge is the Local
Search Methods in USAR 9/1/2008
12
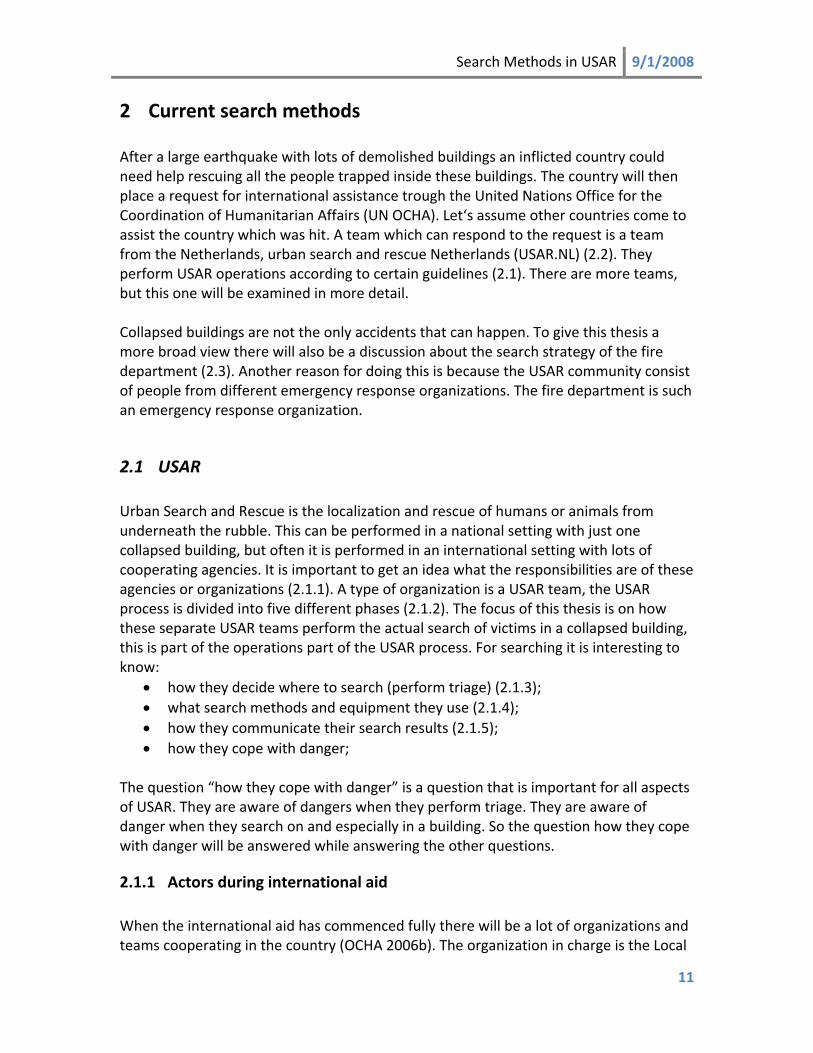
Emergency Management Authority (LEMA). This can refer to a national, regional, local authority or a combination thereof.
Figure 2‐1 International aid organizations (OCHA 2006a).
The international authority is the UN OCHA. This organization is mandated to coordinate international assistance in disasters and humanitarian crises exceeding the capacity of the affected country. The UN OCHA works with lots of organizations and tries to use the international organizations as well as possible. The UN OCHA sends a team of emergency management specialists, the United Nations Disaster Assessment and Coordination team (UNDAC team). This team assists the LEMA with the coordination of the international response. For the assessment of priority and information management the UNDAC team sets up an On‐Site Operations Coordination Centre (OSOCC). In this centre the actions between the different teams and agencies are coordinated. There is also a Virtual OSOCC (vOSOCC) to coordinate between the affected country and the responders before they have arrived in the affected country. Teams and agencies which can be coordinated by the UNDAC team can be (OCHA 2006a) (Figure 2‐1):
• USAR teams (rescue people from collapsed buildings) • UNICEF (protect children and women) • UNDP (strengthen risk management and support post disaster recovery) • UNHCR (survival of refugees) • WFP (provide food) • WHO (health matters) • Red Cross and Red Crescent (health matters) • The Army • Etc.

Search Methods in USAR 9/1/2008
13
Above are the organizations described who try to help. There are also other actors. The victims are of course the most important group. They can be entombed in buildings or be wounded. There is also a large group of residents who are not harmed by the disaster directly but can get injured because of the aftermath of the disaster. Another important group is the press, from the inflicted country or countries the international response came from.
2.1.2 USAR in general “Urban Search and Rescue teams are response assets from the affected country or from the international community that respond to carry out search and rescue activities in collapsed structures.” (OCHA 2006b) This means searching with specialized equipment underneath the rubble of a collapsed building trying to find a living victim. Once found the victim should be excavated from underneath the strongest building materials. The team consists of people who do the actual search and rescue on the rubble and members who try to provide the others with the means to do their work. To make an effort to learn from each other and work following the same guidelines the USAR community formed the International Search and Rescue Advisory Group (INSARAG) part of UN OCHA in 1991 (OCHA 2006b). “INSARAG activities are designed to improve emergency preparedness including strengthening the cooperation between international USAR teams and the exchange of information on operational procedures and lessons learned.” To achieve this, the INSARAG came up with guidelines the USAR teams are advised to follow. In these guidelines there are three types of teams defined (OCHA 2006b): Light, Medium and Heavy teams. Light teams are there to assist on the surface search and rescue. These teams are not recommended to deploy internationally. Medium teams are able to perform technical search and rescue. So they must be able to cut, break and breach concrete, reinforced concrete can be beyond their capabilities. Medium teams have to be operational in the affected country within 32 hours of the posting of the disaster on the vOSOCC. Heavy USAR teams must be able to perform difficult technical search and rescue and must be able to cut, break and breach reinforced concrete. Heavy teams should be operational after 48 hours in the affected country within 48 hours of the posting of the disaster on the vOSOCC. There are also USAR teams which are not accredited as Light, Medium or Heavy. At this date there are 67 recognized USAR teams in the world (OCHA 2008): eight Heavy teams, two Medium team, zero Light teams, and 57 teams which are not categorized according the INSARAG External Classification (IEC). The guidelines are divided into different phases which can be distinguished in the USAR process (OCHA 2006b): Preparedness, Mobilisation, Operations, Demobilisation, Demobilisation, and Post – Mission.
Search Methods in USAR 9/1/2008
14
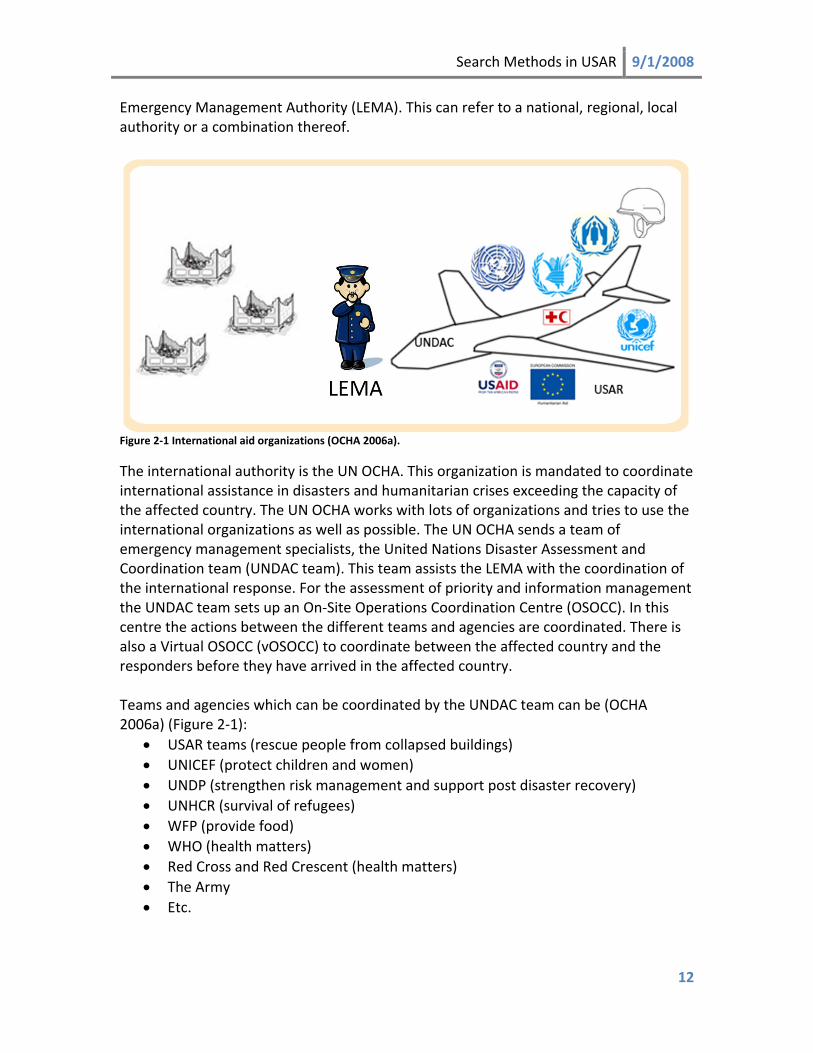
Figure 2‐2 UN INSARAG Methodology Cycle (OCHA 2006) by (Beerens 2007)
Preparedness: In the preparedness phase are the lessons learned from earlier experiences reviewed and implemented. This is also the phase where training and planning for future responses occur. It is important to be ready for international deployment at all times. There should also be a 24‐hour Focal Point available. Mobilization: This phase follows immediately after a disaster and it is the phase where the team is responding to the situation at hand and moves to the affected country. The team should register the teams’ availability in the Virtual OSOCC. When the team expects to be the first team at the disaster location it should also prepare to sustain a Reception

Search Methods in USAR 9/1/2008
15
Departure Centre (RDC) and or OSOCC. A 24 ‐ hour focal point is in the phase also important. It must be said that international assistance only occurs when the country affected by the disaster places a request for it. Operations: This phase starts when the USAR team arrives at the RDC of the affected country. During this phase the USAR team reports to the LEMA and is coordinated by the OSOCC. When the team is the first to arrive it would have to man the RDC and OSOCC itself. Another responsibility is to provide situation reports to the home country. Building a base camp for the team is also important. The actual operation is done according to the INSARAG guidelines. This includes dividing the area into worksites together with the OSOCC. The worksites have to be divided between the available teams. It must be decided which worksite has to be operated on first, this process is called triage. When this is decided the team should search the worksite with specialized equipment and animals. Once a living victim is found it should be excavate. Once the victims are excavated and stabilized they are given over to other medical organizations. Demobilisation: The phase which commences when the USAR team ceases operations and is withdrawing is called demobilisation. The withdrawal should be coordinated by the OSOCC and through the RDC. Of course the home country should know the team is going to withdraw. Post‐Mission: After the mission the team must submit a post mission report and conduct a lessons learned review to improve the team’s performance in future disasters.
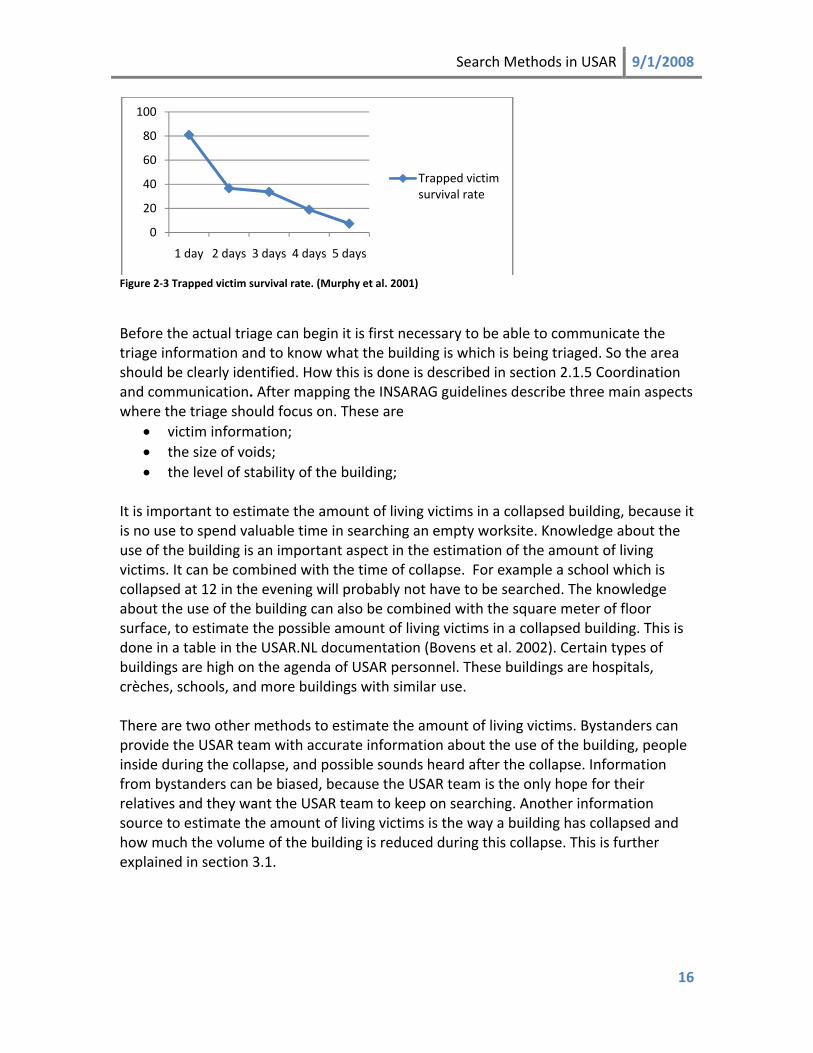
2.1.3 Triage The INSARAG guidelines (OCHA 2006b) describe the triage process. During triage the teams choose which building or worksites they are going to act on first. Triage is important because the chance victims survive being trapped diminishes in days as is described in Figure 2‐3. So choosing the right location where the chances of finding live victims is the largest can save lives. An example which shows this is necessary is the Peru earthquake in 2007 where 8 hospitals and 16,669 houses where effected by the earthquake and the amount of USAR personnel was 55 people (OCHA 2007a) (OCHA 2007b).
Search Methods in USAR 9/1/2008
16
Figure 2‐3 Trapped victim survival rate. (Murphy et al. 2001)
0
20
40
60
80
100
1 day 2 days 3 days 4 days 5 days
Trapped victim survival rate
Before the actual triage can begin it is first necessary to be able to communicate the triage information and to know what the building is which is being triaged. So the area should be clearly identified. How this is done is described in section 2.1.5 Coordination and communication. After mapping the INSARAG guidelines describe three main aspects where the triage should focus on. These are
• victim information; • the size of voids; • the level of stability of the building;
It is important to estimate the amount of living victims in a collapsed building, because it is no use to spend valuable time in searching an empty worksite. Knowledge about the use of the building is an important aspect in the estimation of the amount of living victims. It can be combined with the time of collapse. For example a school which is collapsed at 12 in the evening will probably not have to be searched. The knowledge about the use of the building can also be combined with the square meter of floor surface, to estimate the possible amount of living victims in a collapsed building. This is done in a table in the USAR.NL documentation (Bovens et al. 2002). Certain types of buildings are high on the agenda of USAR personnel. These buildings are hospitals, crèches, schools, and more buildings with similar use. There are two other methods to estimate the amount of living victims. Bystanders can provide the USAR team with accurate information about the use of the building, people inside during the collapse, and possible sounds heard after the collapse. Information from bystanders can be biased, because the USAR team is the only hope for their relatives and they want the USAR team to keep on searching. Another information source to estimate the amount of living victims is the way a building has collapsed and how much the volume of the building is reduced during this collapse. This is further explained in section 3.1.
Search Methods in USAR 9/1/2008
17
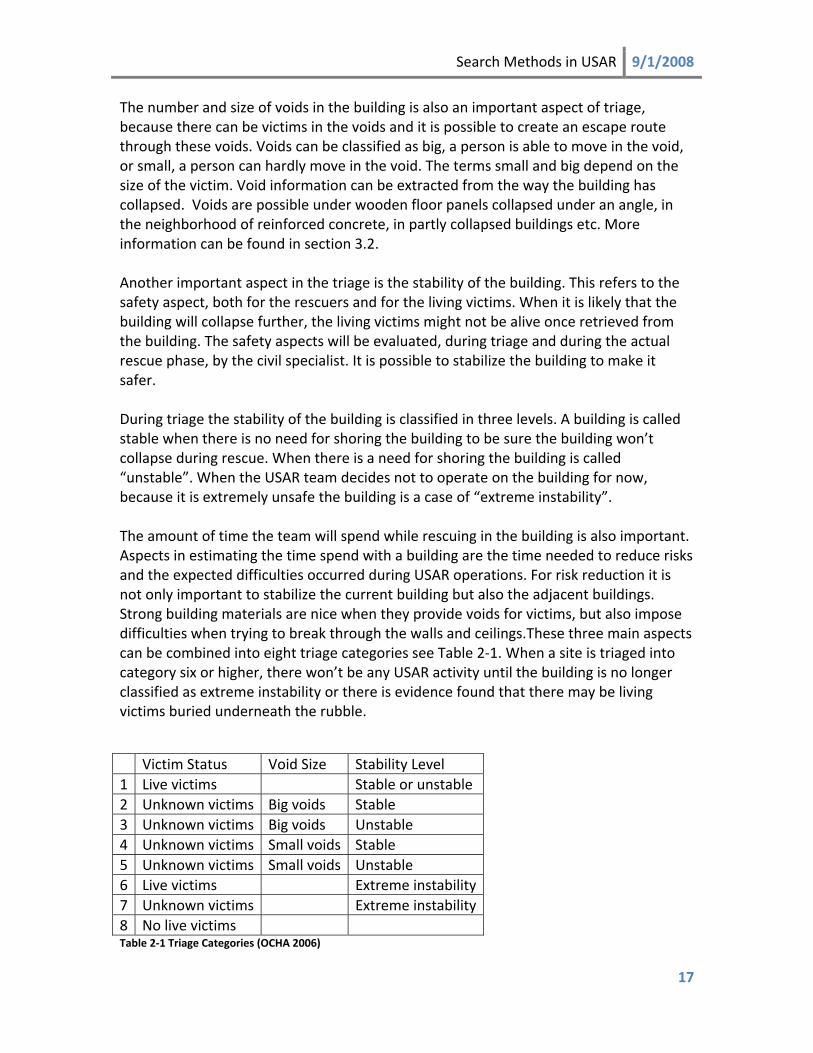
The number and size of voids in the building is also an important aspect of triage, because there can be victims in the voids and it is possible to create an escape route through these voids. Voids can be classified as big, a person is able to move in the void, or small, a person can hardly move in the void. The terms small and big depend on the size of the victim. Void information can be extracted from the way the building has collapsed. Voids are possible under wooden floor panels collapsed under an angle, in the neighborhood of reinforced concrete, in partly collapsed buildings etc. More information can be found in section 3.2. Another important aspect in the triage is the stability of the building. This refers to the safety aspect, both for the rescuers and for the living victims. When it is likely that the building will collapse further, the living victims might not be alive once retrieved from the building. The safety aspects will be evaluated, during triage and during the actual rescue phase, by the civil specialist. It is possible to stabilize the building to make it safer. During triage the stability of the building is classified in three levels. A building is called stable when there is no need for shoring the building to be sure the building won’t collapse during rescue. When there is a need for shoring the building is called “unstable”. When the USAR team decides not to operate on the building for now, because it is extremely unsafe the building is a case of “extreme instability”. The amount of time the team will spend while rescuing in the building is also important. Aspects in estimating the time spend with a building are the time needed to reduce risks and the expected difficulties occurred during USAR operations. For risk reduction it is not only important to stabilize the current building but also the adjacent buildings. Strong building materials are nice when they provide voids for victims, but also impose difficulties when trying to break through the walls and ceilings.These three main aspects can be combined into eight triage categories see Table 2‐1. When a site is triaged into category six or higher, there won’t be any USAR activity until the building is no longer classified as extreme instability or there is evidence found that there may be living victims buried underneath the rubble.
Victim Status Void Size Stability Level 1 Live victims Stable or unstable 2 Unknown victims Big voids Stable 3 Unknown victims Big voids Unstable 4 Unknown victims Small voids Stable 5 Unknown victims Small voids Unstable 6 Live victims Extreme instability7 Unknown victims Extreme instability8 No live victims Table 2‐1 Triage Categories (OCHA 2006)
Search Methods in USAR 9/1/2008
18
The worksite is now triaged according to the evidence found on the building. It is also possible there are organizational constraints. Like the possibility of transport to the worksite, the availability of needed equipment or security and cultural factors. Sometimes the expected age of the victims can also be taken into account. For example what do you search first an elderly home or a child day care center? Sometimes the LEMA has different priorities; such a constraint is more political. More detailed information can be found in the USAR.NL manual (Bovens et al. 2002) and the Field Operations Guide from the Federal Emergency Management Agency (FEMA) in the USA (FEMA 2003).
2.1.4 Search methods and equipment The disaster area is divided into worksites which are prioritized during triage and the USAR team arrives at a worksite and needs to find and rescue victims. The question for this section is what equipment and search tactics will be used during the search phase. The easiest answer is all the search options available, when safety allows it (Bovens et al. 2002). Search dogs are often used by the USAR community, because the dogs can search large area’s in a short period. They always work in teams: someone who is overseeing the operation, often the group leader, someone functioning as a safety warden and off course the dog handlers. They work with two separate dog teams, this means two dogs and two dog handlers. This is useful because when one dog signs there is a victim in the rubble, by barking. The other dog team can serve as a second opinion. This is to prevent the team from uselessly putting effort in an area where there is no victim. The place where the dogs sign there is a victim does not have to be the actual place a victim is, because of the flow of smell through the rubble. It is also a problem that a dog can only work for a short period and the results depend on the skills of the handler. This person must interpret the body language of the dog and keep the spirit of the dog up. Apart from sniffing dogs there are also camera dogs. When a victim is identified with a camera there is no need for a second opinion. This is because the victim can be seen on camera, so there is no doubt left. It must be said that is rather difficult to interpret the video footage delivered by a robot or camera dog, because of teleoperating problems explained further in section 4.5. A search method which is still in development, and already used, is the search with robots (Casper and Murphy 2003). The major advantage of a robot is that it is replaceable, where a human or dog is not. So when the structural integrity is not
Search Methods in USAR 9/1/2008
19
guaranteed a human won’t go in whereas a robot will, other reasons why a human will not enter a construction and a robot can are for example high temperature or hazardous materials. Robots are not immune to high temperature, but for example when a track of a robot melts (as happened at the WTC) the loss is not so big. A robot will also be able to negotiate small entrances and search very deeper in the rubble. So a robot can bring sensors to locations which could not be reached otherwise. The robots used nowadays are mostly tethered, since the density of the material can interfere with the wireless network control. At the other end of the robot’s tether is the robot handler, this must be someone with special training. It has been shown that when one person controls the robot and someone else, the problem owner, uses the robot sensors to find victims the chance of finding someone will be nine times more likely than when one person controls the robot (Murphy and Burke 2005). It remains pretty difficult to precisely navigate the robot and it is not always clear where the robot is located in the rubble exactly. Because of teleoperating problems and unexpected movement. Another type of equipment used in the USAR community are camera’s. Camera’s which depend on a light source or more specialized ones like thermal‐ or infrared cameras. A big advantage of the use of cameras is that when a victim is recognized with a camera there is no need for a second opinion. A disadvantage is that the camera must be in visual range of the victim, so it should be connected to a stick, fiberglass, dog, or a robot and brought to the victim. The same goes for thermal and infrared cameras. Another limiting factor for normal cameras is that they also need a light source. A search tactic for cameras is that one team member drills holes in the building and that the technical searcher follows with the camera. In this way it is possible to search a large area efficiently. This is a potentially dangerous method because the vibrations of the drill can be harmful for the building. When the victim is found a camera can keep an eye on the victim. Thermal and infrared cameras are often available for the local authorities and are used to check large dark and open areas quickly, for living victims. Unfortunately it remains difficult to differ human heat sources from heat sources like fire. The use of electronic seismic of acoustic devices is also possible. This is more specialized equipment and is used by the technical searcher. When the method has success with localizing the victim another technical searcher must do a second opinion. To find people there is a chain of sensors positioned at the disaster site. When there is a positive id the chain of sensors is repositioned to better locate the victim. The sensors have a range of 7 to 9 meters for acoustic sensors and 25 meters for seismic sensors. Before positioning the sensors the disaster area is first thoroughly checked and mapped. And the results of other search methods are collected. Combined with information about the interior of the building this results in a better positioning of the sensors. The

Search Methods in USAR 9/1/2008
20
results of the sensors are written down by the technical searcher, to document the search process. This is done to be better able to reposition the sensors and locate the victim more precisely. The sensors can be really precise, small vibrations are detectable. This imposes the problem of noise. During USAR operations lots of heavy equipment is used on an in the neighborhood of the building, which can be read in the sensor output. A more detailed description about the search methods USAR teams use or can use in the future can be found in chapter 4.
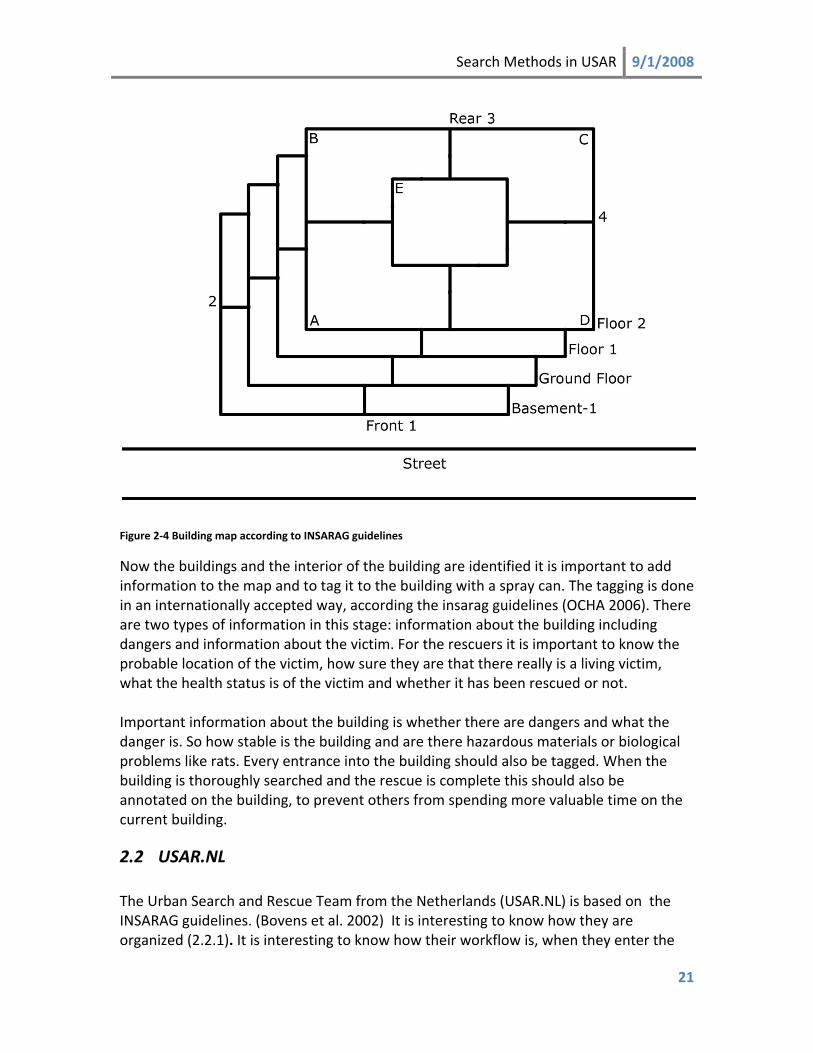
2.1.5 Coordination and communication tools The LEMA is ultimately responsible for the USAR activities in the inflicted country (OCHA 2006b). So in the end they are responsible for the coordination between USAR teams and other organizations. To be able to communicate between SAR teams, team members, the USAR commanders, and other USAR organizations maps are made or existing maps are expanded. The findings are also tagged on the building. Mapping and tagging are the two tools explained in this section. An important thing is that the maps should be made in such a way that the described buildings are recognized. This is achieved by annotating landmarks on the maps and annotating information on the map which is then marked on the buildings. One can think of building numbers and street names. This information can be lost during the disaster. Information about the building style of the building can also help in the identification of the building. Once the building is identified it is also useful to identify the inner part of the building. See Figure 2‐4. The sides of a building are numbered clockwise where the side next to the street is side one. The building is also subdivided into parts. The part the closest to the corner which is located at the left of side one (viewed from the street) is part A. The next part is located closest to the clockwise next corner and so on. In the middle is another part E. The floors are also annotated. The first used floor is labeled “Ground Floor” the next Floors are “Floor one”, “Floor two” and so on. Beneath “Ground Floor” is “Basement‐(the number of floors beneath “Ground Floor”)”. Some building have columns, these must also be numbered in the map and marked in real live. Preferably this is done according to the floor plan, but since that is not always available it may be numbered according to a grid. On the grid there are letters on the long side and numbers on the short side. (USACE 2005) Important is that the map and the markings on the building must be the same.
Search Methods in USAR 9/1/2008
21
Figure 2‐4 Building map according to INSARAG guidelines
Now the buildings and the interior of the building are identified it is important to add information to the map and to tag it to the building with a spray can. The tagging is done in an internationally accepted way, according the insarag guidelines (OCHA 2006). There are two types of information in this stage: information about the building including dangers and information about the victim. For the rescuers it is important to know the probable location of the victim, how sure they are that there really is a living victim, what the health status is of the victim and whether it has been rescued or not. Important information about the building is whether there are dangers and what the danger is. So how stable is the building and are there hazardous materials or biological problems like rats. Every entrance into the building should also be tagged. When the building is thoroughly searched and the rescue is complete this should also be annotated on the building, to prevent others from spending more valuable time on the current building.
2.2 USAR.NL The Urban Search and Rescue Team from the Netherlands (USAR.NL) is based on the INSARAG guidelines. (Bovens et al. 2002) It is interesting to know how they are organized (2.2.1). It is interesting to know how their workflow is, when they enter the
Search Methods in USAR 9/1/2008
22
worksite or collapsed building (2.2.2). Guidelines are still guidelines and sometimes they are not followed exactly. One difference between the INSARAG Guidelines and the USAR.NL has been found (2.2.3).
Figure 2‐5 USAR.NL(Bovens et al. 2002)
The name USAR.NL is an acronym for the urban Search And Rescue team from the Netherlands. After a disaster in an urban area, with collapsed buildings this team will make an effort to rescue as much (buried) victims as possible. This must be done quickly, because the chance of Rescuing living victims diminishes heavily after the first 72 hours after a disaster. The deployment of USAR.NL can be in a national or international setting for a maximum of 10 days. (Bovens et al. 2002) Assisting the local authorities in the rescue of victims is only part of the goal for USAR.NL. Other goals are:
• Performing first aid in the search area • Contribute to the OSOCC, for international cooperation. • Stabilize the incident area • Support the local authorities with specialized knowledge • Make quarters for other support units from the Netherlands
The USAR.NL team is relatively new. It was decided to found USAR.NL after the “Vuurwerkramp Enschede” in 2000 (Bovens et al. 2002). The official installation of the team members was the 26th of November 2003 and after an annual exercise in June 2007 USAR.NL was classified as a heavy team. So they can perform complicated Search And Rescue Operations in the most difficult circumstances (uSAR‐nl 2007a). It was the third team to receive this classification. USAR.NL has been in three disasters or accidents. In Pakistan after an earthquake they have been searching buildings and helping the wounded with an emergency hospital (Saeijs et al. 2006). In Morocco USAR.NL has been active with reconnaissance of the environment. They evaluated the health of the citizens and they visited a hospital, which was in need of supplies. They also send out a team to a village which was hit by the earthquake, but there was no need any more for USAR’s assistance (Bron 2004). Then there was the first national accident where USAR.NL was involved. This was in Beek, a fork‐lift truck chauffeur was found death beneath a mountain of rubble (uSAR‐nl 2007). To be able to be effective in real accidents USAR.NL has to train. Every member of USAR.nl conducts three types of training (Bovens et al. 2002). First they train in their own organization. The second type of training is the USAR exercise days to train in a complete team to rescue victims from a building. The third type of exercise is an
Search Methods in USAR 9/1/2008
23
exercise team members do once in two years. It is an international exercise that addresses all challenges a USAR team must cope with. When there is a disaster USAR.NL has to be asked by the country to come and aid in the rescue of victims. How the decision is made to go or not to go is described in (Bovens et al. 2002). What is certain is that USAR.NL will always be deployed in some sort of a crisis situation, which cannot be fully controlled. So the next sections about the search method deployed by USAR.NL is an indication on how it could or should be.
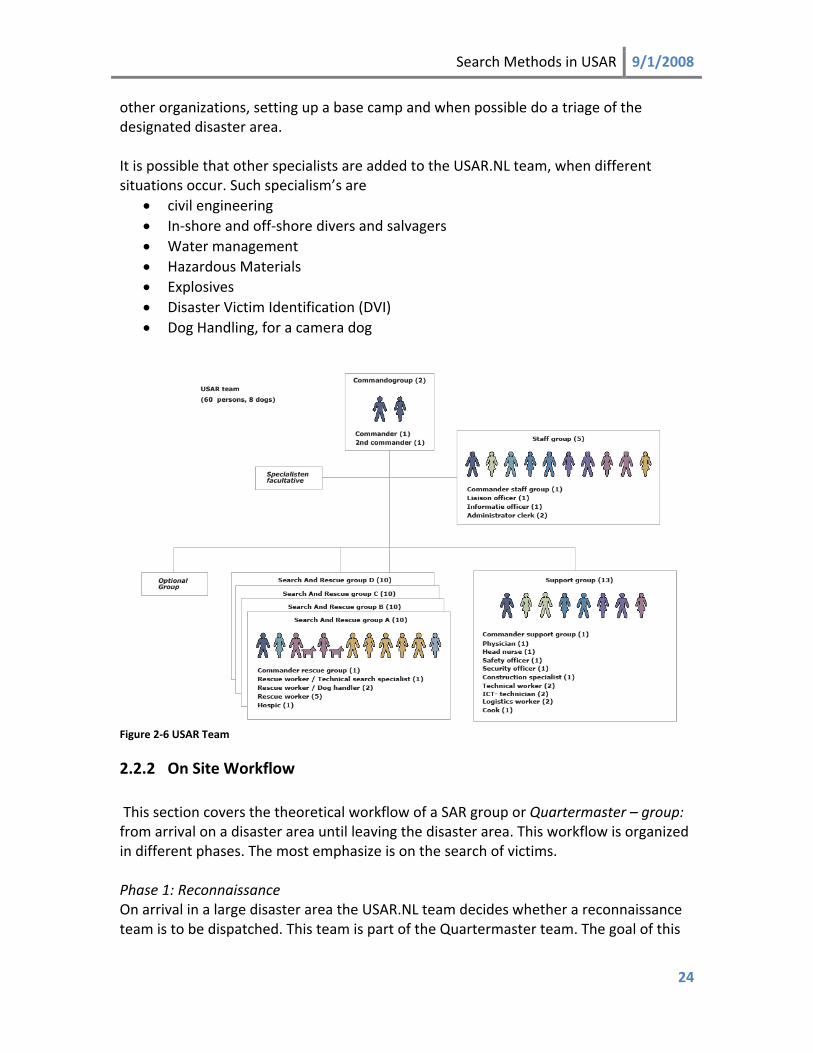
2.2.1 People and organization The USAR.NL unit consist of 60 people, eight search dogs and material. This unit is divided into groups each with their own responsibilities and goals. When the support of USAR.NL is needed during a disaster the unit can be send out partly or be supplemented with other useful specialisms. The standard unit consists of the following groups: Command Group: This group consists of a commander and the substitute commander. They are responsible for leading the entire operation. The contact with the media and writing combined situation reports for the people left at home and the Country Operational Team (COT). Four SAR groups: These groups are responsible for the actual Search and Rescue and need to be supported by the other groups as well as possible. These groups should be self supporting, because they can be far apart from each other and the base camp. So they need to bring their own equipment and medical personnel. Some team members have an additional specialty. One team member is a technical searcher and two team members are dog handlers. (Bovens et al. 2002). Staff group: The staff group of USAR.NL supports the Command group with the administration, the contact with other organizations, the gathering of information and the control of the base camp. The SAR groups are also supported by the staff group for example with medical problems, structural evaluation and safety issues. Support group: Next to the staff group is the support group, its main goal is to take care of the equipment, the food, the transport means and the base camp. Quartermaster – group: This group consists of team members from the other groups. It is the first group to leave to the disaster area and will try to smooth the arrival of the other groups. So contact
Search Methods in USAR 9/1/2008
24
other organizations, setting up a base camp and when possible do a triage of the designated disaster area. It is possible that other specialists are added to the USAR.NL team, when different situations occur. Such specialism’s are
• civil engineering • In‐shore and off‐shore divers and salvagers • Water management • Hazardous Materials • Explosives • Disaster Victim Identification (DVI) • Dog Handling, for a camera dog
Figure 2‐6 USAR Team
2.2.2 On Site Workflow This section covers the theoretical workflow of a SAR group or Quartermaster – group: from arrival on a disaster area until leaving the disaster area. This workflow is organized in different phases. The most emphasize is on the search of victims. Phase 1: Reconnaissance On arrival in a large disaster area the USAR.NL team decides whether a reconnaissance team is to be dispatched. This team is part of the Quartermaster team. The goal of this
Search Methods in USAR 9/1/2008
25
team is to perform triage on the whole area which has been assigned to USAR.NL and communicate this with the first commander. Important aspects are the amount of victims who can be in the collapsed building, the structural integrity of the building (for safety reasons) and the presence of hazardous materials. Of course there is a need to communicate this efficiently and for that reason the reconnaissance team either starts compiling a map or adds information to a map which already exists. In the end of this phase an action plan or “inzet plan” is made. The reconnaissance team consists of a number of people with varying interests and capabilities. The second commander will lead the reconnaissance team and according to the situation the following persons can join him:
• the group leaders (of the search teams) • a civil specialist • the dog handlers • a paramedic • a technical searcher • more rescue personal • a hazardous materials specialist • other specialists
To make a prioritized action plan there is some information that needs to be gathered. The findings will be annotated on a map and on the buildings. To be able to communicate to their superiors and to let other USAR teams know this disaster area has already been explored. It is important that the buildings on the map are recognized in the disaster area even when they are collapsed. So they annotate landmarks on the map and they try to figure out the number of the building and paint it on the building and annotate the same number on the map. It is possible victims are found immediately on arrival in the disaster area. The reconnaissance team will determine whether there is an immediate need for help. Whether there are victims buried in an area is the most important information for the SAR groups. When there are dogs present in the reconnaissance team they can be utilized to search large areas for victims. It is also possible to estimate the number of victims in a collapsed building according to other information you have from the building. After information about the number of victims is known it is important to know whether it is safe to perform the actual search and hopefully rescue. An important aspect in this is whether the structural integrity is sufficient especially when there is heavy equipment needed to free the victim. Other important aspects are the possibility of leaking hazardous materials or fire. Each of these aspects can lead to a no go decision. It is necessary that this decision is done by two persons separately and that the decision is reevaluated when the situation changes.
Search Methods in USAR 9/1/2008
26
Phase 2: Rescue easy accessible and visible victims This is the phase where the rescue personal itself can become a victim, because collapsed buildings which seem to have sufficient integrity might not have. The surface of the building is searched thoroughly and victims which are easily accessible are rescued. These victims often do not need immediate medical care. Phase 3: Search in accessible spaces This is the most interesting search phase, where the victims are found deep inside the building. There are lots of techniques used in this phase, which will be discussed in separate sections. Personnel of USAR.NL makes use of search dogs, camera’s on sticks or on fibreglass. It is also possible for the personnel to physically crawl into the building. Only highly trained personnel may perform this type of search. These techniques where more thoroughly explained in paragraph 2.1.4. In this phase there is no help from locals allowed, because it is so important to search thoroughly and the locals won’t be able to use the specialized equipment. When a living victim is found the place will be marked and part of the team moves on to the next phase while the rest keeps on looking for more victims. Phase 4: Rescue obstructed victims In this phase the actual rescue takes place. It can last from two hours to approximately a full day. The amount of time needed for the rescue depends on how deep the victim is located and how well the victim is connected to the outside world with voids. For the voids it is important to know the exact location of the victim and how the building collapsed. In this phase the team will make use of their special search equipment. The removal of debris can be done with heavy equipment, man power and whatever is available to the team. So the locals can also help during this phase. Once every victim is rescued or the chances of saving live victims are diminished the team moves on to phase five. Phase 5: Clean up The removal of debris is done after all the victims are rescued.
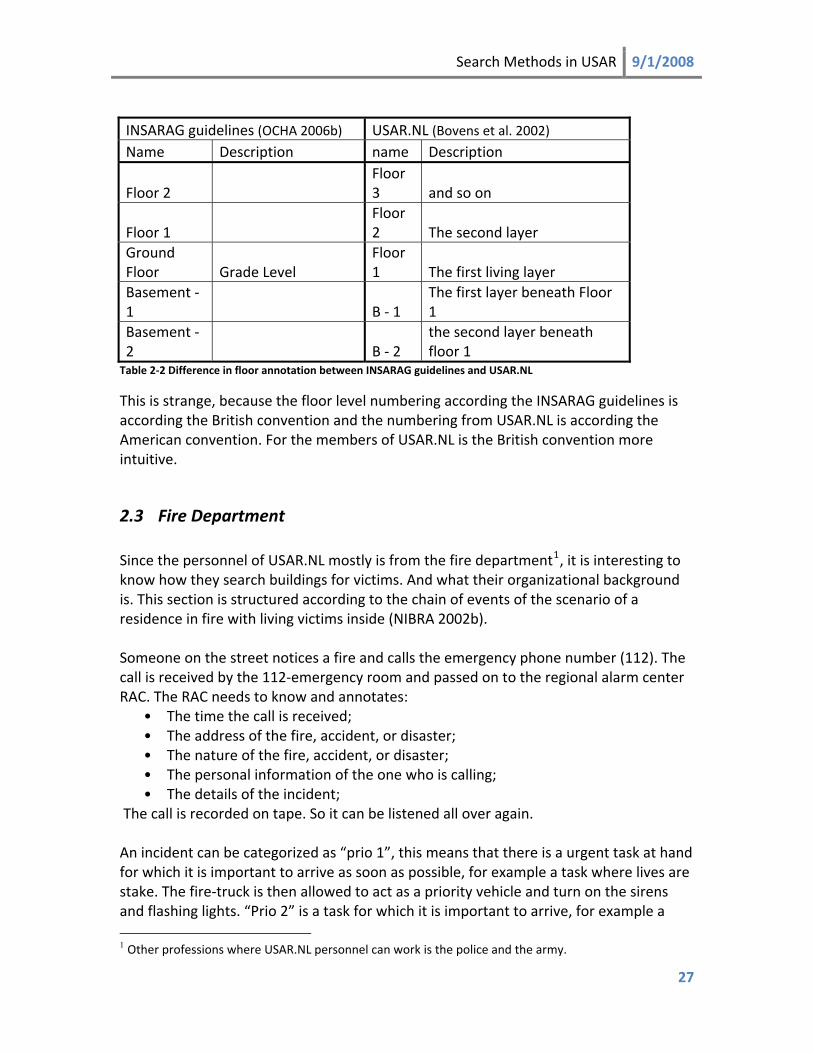
2.2.3 Differences to INSARAG guidelines USAR.NL differs from the INSARAG guidelines in their way of counting floors in a multistory building.
Search Methods in USAR 9/1/2008
27
INSARAG guidelines (OCHA 2006b) USAR.NL (Bovens et al. 2002) Name Description name Description
Floor 2 Floor 3 and so on
Floor 1 Floor 2 The second layer
Ground Floor Grade Level
Floor 1 The first living layer
Basement ‐ 1 B ‐ 1
The first layer beneath Floor 1
Basement ‐ 2 B ‐ 2
the second layer beneath floor 1
Table 2‐2 Difference in floor annotation between INSARAG guidelines and USAR.NL
This is strange, because the floor level numbering according the INSARAG guidelines is according the British convention and the numbering from USAR.NL is according the American convention. For the members of USAR.NL is the British convention more intuitive.
2.3 Fire Department Since the personnel of USAR.NL mostly is from the fire department1, it is interesting to know how they search buildings for victims. And what their organizational background is. This section is structured according to the chain of events of the scenario of a residence in fire with living victims inside (NIBRA 2002b). Someone on the street notices a fire and calls the emergency phone number (112). The call is received by the 112‐emergency room and passed on to the regional alarm center RAC. The RAC needs to know and annotates:
• The time the call is received; • The address of the fire, accident, or disaster; • The nature of the fire, accident, or disaster; • The personal information of the one who is calling; • The details of the incident;
The call is recorded on tape. So it can be listened all over again. An incident can be categorized as “prio 1”, this means that there is a urgent task at hand for which it is important to arrive as soon as possible, for example a task where lives are stake. The fire‐truck is then allowed to act as a priority vehicle and turn on the sirens and flashing lights. “Prio 2” is a task for which it is important to arrive, for example a 1 Other professions where USAR.NL personnel can work is the police and the army.
Search Methods in USAR 9/1/2008
28
tree which is fallen on an empty vehicle. The fire‐truck is then allowed to drive over a cycle path (MINBZK 2003). After receiving the call the RAC centralist warns the fire personnel. The fire personnel in the barracks are alerted by light or sound signals, information about the incident is given to them using digital text boards at strategic places. Personnel not in the barracks are warned with beepers. According on the type of incident is decided, what the strength is of the team which is going to the incident and what the priority is of the disaster. When all the fire personnel has put on his or her suit and has arrived at the truck, it leaves. In the truck is a seat for six people, every seat is meant for a different function (NIBRA 2002b). Of course there is a driver behind the wheel. The driver is responsible for the pump, after the fire‐truck arrives at the scene. Next to the driver is the place for the commander. Behind them is a position for the attack team, the first team to enter the building and the water or extinguish team. The two people in the attack team have the numbers 1 and 2 assigned to them. The water or extinguish team are number 3 and 4, they are responsible for providing water to the pump. When there are people in danger in number 3 and 4 will also participate in the rescue. Because extinguishing the fire has less priority than rescuing people. While driving number 1 and 2 and possibly water number 3 and 4 are getting dressed and ready to enter a building with smoke. This means they have to wear respiratory protective devices and check whether it is working correctly and there is enough air in the cylinder. Another important thing to check is the communication. Number 3 and 4 are also responsible for steering the driver. Lately they get help from a navigation device, the Mobile Data Terminal (MDT). Information about the incident is transferred into the device by the RAC, so it is no longer necessary to type in the address. When the MDT is broken number 3 and 4 steer the driver to a well known main road, so they have time to prepare for the rest of the route. In the MDT is also fire department specific information stored. Like the possible nearby water sources. By steering the driver number 3 and 4, who are responsible for providing water to the pump also seem to get higher situational awareness and better know where to get the water. In the MDT is a relation shown to the attack plan stored in the fire‐truck. An attack plan is a plan for the fire department for two reasons (Godding 2004). The first reason is to support the beginning of the operation. This is done with a map of the environment the necessary first information like where the water sources are, specific dangers of the building and what kind of firefighting installations are in the building. Later phases of the operation are supported by the attack plan by maps of every floor of the building and some scenario’s which can happen in the particular building.
Search Methods in USAR 9/1/2008
29
This plan is used by the commander to get situational awareness. He is responsible for that. And need to give precise orders to his or her personnel. During the ride the commander reads the fire‐attack plan and calls to the RAC to get more information about the incident, including confirmation about the type of incident. On arrival there is a need to get even more information. Are there still people inside the building? Bystanders are a good source for that. Also the building itself can give clues. Is fire visible? Is smoke visible? What can you see from the outside of the building inside. The commander will explore the building. He is responsible for the tactics and creating situational awareness. When there are victims in the building, the two teams go in. Otherwise only the team consisting of firemen 1 and 2 goes in and the firemen 3 and 4 will then be busy with arranging the water supply. Entering a building on fire will be done with respiratory protective devices, with two persons and a hose (NIBRA 2002a). A problem for firemen in this situation is that, he can’t use all of his modalities. He is pretty blind, because of the smoke. He can’t smell because he breaths through a respirator. So when he smells anything strange his respirator is broken and he needs to return as quickly as possible. His tactile capabilities are also reduced, because of the suit and cloves he is wearing. The respirator makes a lot of noise so he needs to hold his breadth when he wants to listen. For safety reason is it important to always keep a physical link with each other and the exit, otherwise they can lose each other and get lost in the building. One of the sayings in the fire department is, you enter with two and you leave with two. Leaving the building can of course also be done with more people, when they have rescued someone, but the bottom line is you stay together, always. Keeping the physical link with the exit can be done in multiple ways. The primary way is to always keep in touch with the wall. This way they feel everything which they pass to remember the route to go back later. In a larger room they can decide whether to search clockwise or counter clockwise. They decide on this according on the information they have. For example when a victim returns their yell they try to choose the fastest route to the victim. When they discover by clapping in their hands that the room is too large to search only by the wall, they have be connected with the exit in another way. This can be the fire hose or a rope which averts fire. Safety is very important for a fireman. So moving forward must also be done in a safe way. This is important because the floor can collapse in front of them and they don’t want to bump into something. Another safety aspect is that a fireman will never go passed the seat of fire, because his escape route can then be blocked when the fire grows. Behind doors can also be a seat of fire, so every door needs to be checked. To keep different teams from opening the same door and search behind it they have a door clamp. This can be placed at different positions for different meanings and is also used to keep the door open when it is necessary to put out a fire‐seat behind the door.

Search Methods in USAR 9/1/2008
30
When they find a victim they will try to extract him as soon as possible. Hopefully the victim can walk himself, otherwise they have to carry him to a place where they gather all the victims. They always check whether there are more victims at the same place. And they will never treat the victim inside the dangerous area. Rescuing victims is done before the attack on the fire commences. When it is a large fire there will be more than one fire‐truck (NIBRA 2002b). This means that there are more commanders at the place of incident. To make sure there is no misunderstanding higher officers will take command for larger disasters.

Search Methods in USAR 9/1/2008
31
3 Building Collapse Patterns When an USAR team is searching. This will always be in a potentially hazardous environment, a collapsed building. There has been research on building collapses and it has been found that buildings often collapse in a pattern. (Schweier and Markus 2004), (Schweier and Markus 2006). The different collapse patterns are grouped and discussed in this chapter (3.1). Collapse patterns also provide information on the possible voids in the building. This is important information because voids need to be checked for victims during the triage and search process. Collapsed buildings with more or larger voids are more likely to have more living victims. There is information on where voids can be provided there is knowledge over a collapse pattern (Murphy et al. 2001) and (EMA 2006) (3.2).
3.1 Collapse Patterns Whole buildings can collapse in a certain pattern. There is research done to be able to classify the collapsed building to a certain pattern. This gives the opportunity to estimate the resources needed for the rescue activities on a building. (Schweier and Markus 2004). There are five main collapse pattern groups distinguished:
• Inclined Layers (3.1.1) • Pancake collapses (3.1.2) • Debris Heaps (3.1.3) • Overturn collapses (3.1.4) • Overhanging elements (3.1.5)
Search Methods in USAR 9/1/2008
32
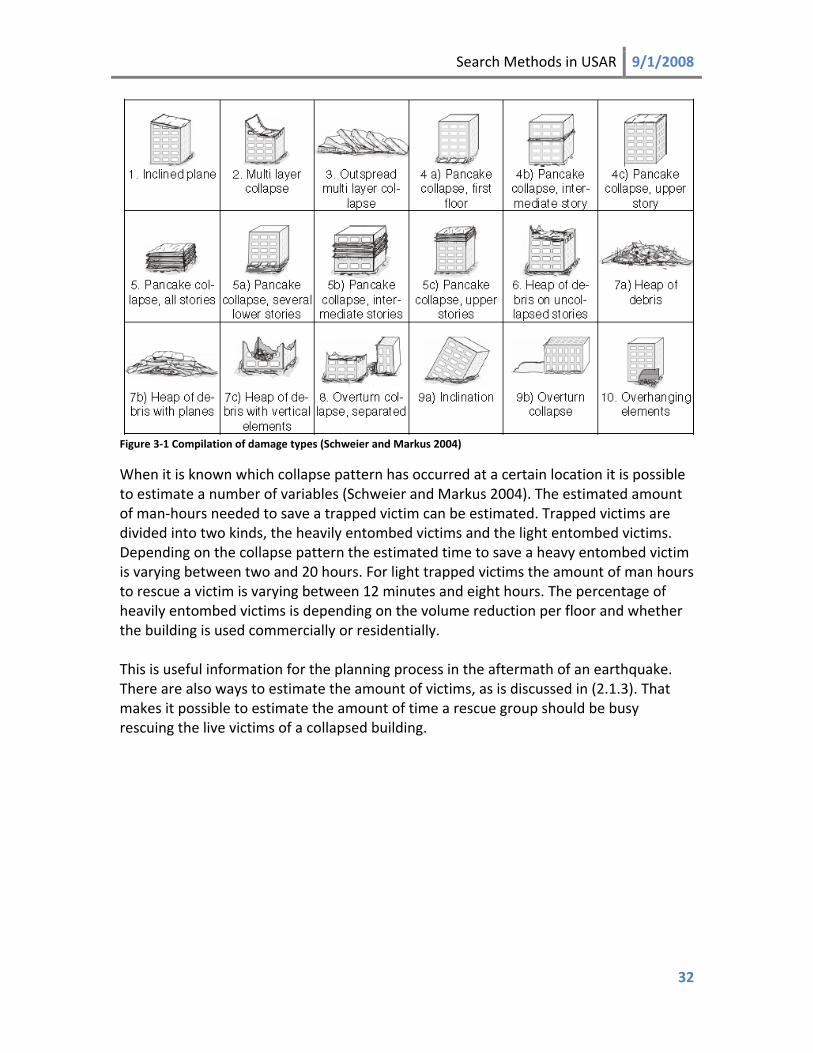
Figure 3‐1 Compilation of damage types (Schweier and Markus 2004)
When it is known which collapse pattern has occurred at a certain location it is possible to estimate a number of variables (Schweier and Markus 2004). The estimated amount of man‐hours needed to save a trapped victim can be estimated. Trapped victims are divided into two kinds, the heavily entombed victims and the light entombed victims. Depending on the collapse pattern the estimated time to save a heavy entombed victim is varying between two and 20 hours. For light trapped victims the amount of man hours to rescue a victim is varying between 12 minutes and eight hours. The percentage of heavily entombed victims is depending on the volume reduction per floor and whether the building is used commercially or residentially. This is useful information for the planning process in the aftermath of an earthquake. There are also ways to estimate the amount of victims, as is discussed in (2.1.3). That makes it possible to estimate the amount of time a rescue group should be busy rescuing the live victims of a collapsed building.
Search Methods in USAR 9/1/2008
33
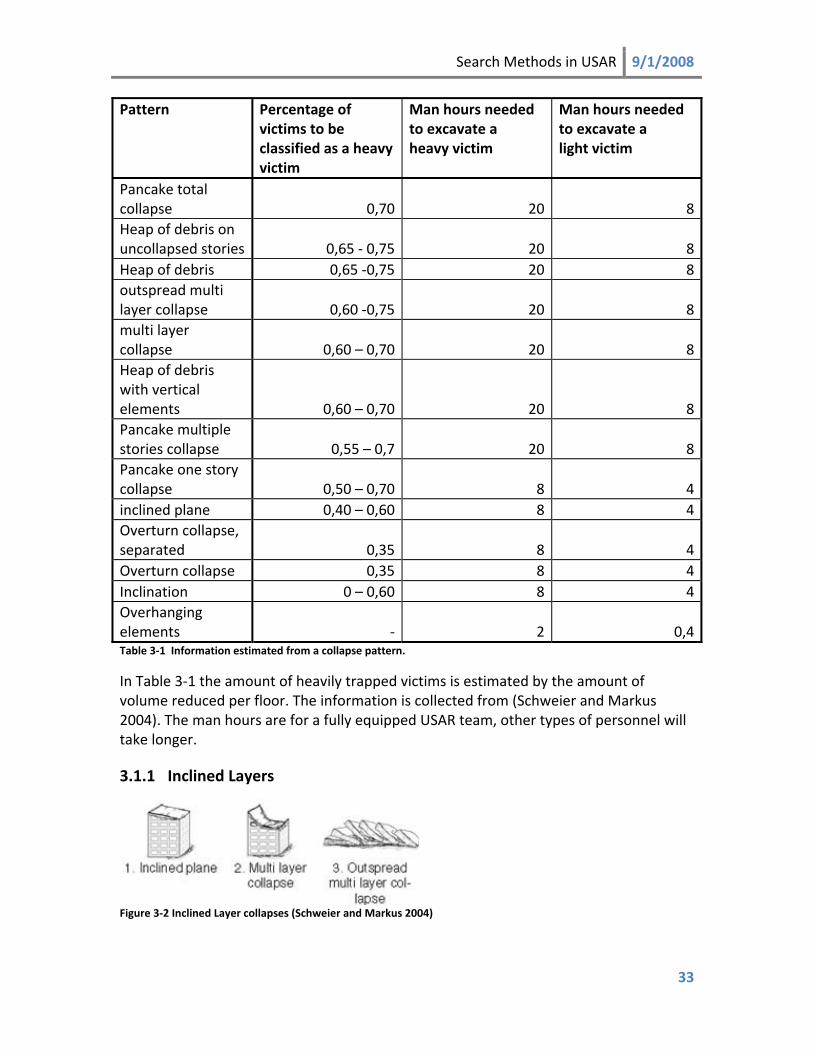
Pattern Percentage of victims to be classified as a heavy victim
Man hours needed to excavate a heavy victim
Man hours needed to excavate a light victim
Pancake total collapse 0,70 20 8Heap of debris on uncollapsed stories 0,65 ‐ 0,75 20 8Heap of debris 0,65 ‐0,75 20 8outspread multi layer collapse 0,60 ‐0,75 20 8multi layer collapse 0,60 – 0,70 20 8Heap of debris with vertical elements 0,60 – 0,70 20 8Pancake multiple stories collapse 0,55 – 0,7 20 8Pancake one story collapse 0,50 – 0,70 8 4inclined plane 0,40 – 0,60 8 4Overturn collapse, separated 0,35 8 4Overturn collapse 0,35 8 4Inclination 0 – 0,60 8 4Overhanging elements ‐ 2 0,4Table 3‐1 Information estimated from a collapse pattern.
In Table 3‐1 the amount of heavily trapped victims is estimated by the amount of volume reduced per floor. The information is collected from (Schweier and Markus 2004). The man hours are for a fully equipped USAR team, other types of personnel will take longer.
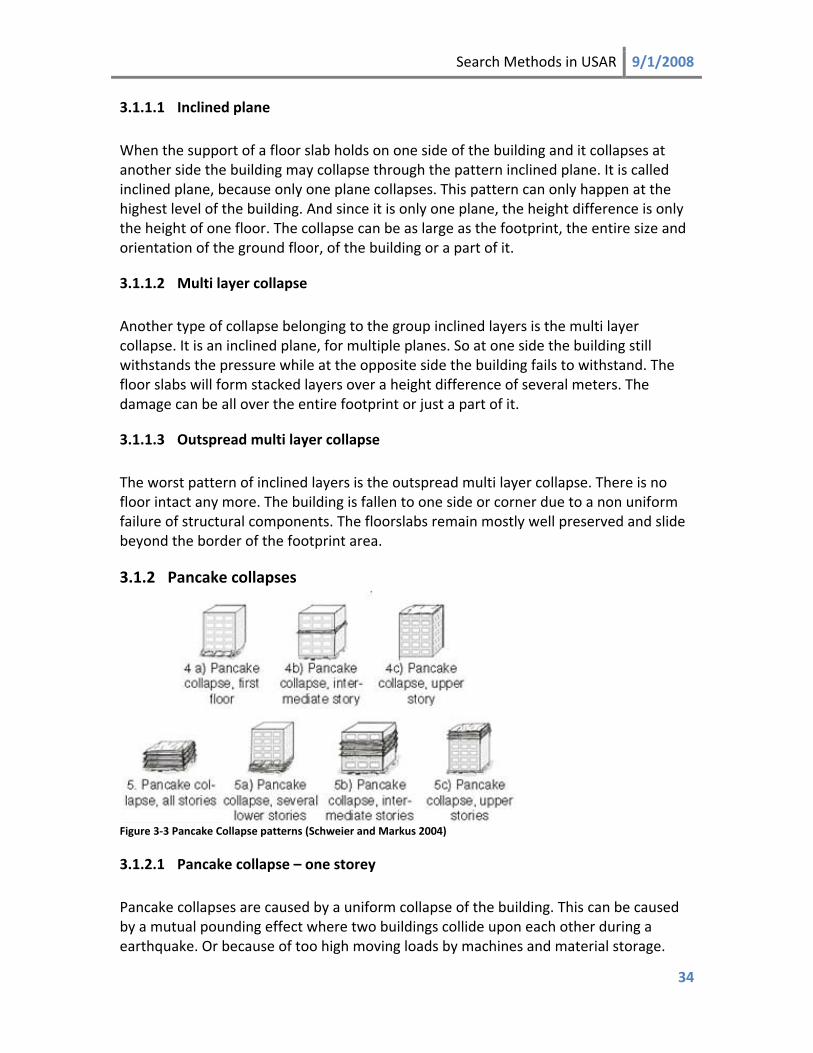
3.1.1 Inclined Layers
Figure 3‐2 Inclined Layer collapses (Schweier and Markus 2004)
Search Methods in USAR 9/1/2008
34
3.1.1.1 Inclined plane
When the support of a floor slab holds on one side of the building and it collapses at another side the building may collapse through the pattern inclined plane. It is called inclined plane, because only one plane collapses. This pattern can only happen at the highest level of the building. And since it is only one plane, the height difference is only the height of one floor. The collapse can be as large as the footprint, the entire size and orientation of the ground floor, of the building or a part of it.
3.1.1.2 Multi layer collapse
Another type of collapse belonging to the group inclined layers is the multi layer collapse. It is an inclined plane, for multiple planes. So at one side the building still withstands the pressure while at the opposite side the building fails to withstand. The floor slabs will form stacked layers over a height difference of several meters. The damage can be all over the entire footprint or just a part of it.
3.1.1.3 Outspread multi layer collapse
The worst pattern of inclined layers is the outspread multi layer collapse. There is no floor intact any more. The building is fallen to one side or corner due to a non uniform failure of structural components. The floorslabs remain mostly well preserved and slide beyond the border of the footprint area.
3.1.2 Pancake collapses
Figure 3‐3 Pancake Collapse patterns (Schweier and Markus 2004)
3.1.2.1 Pancake collapse – one storey
Pancake collapses are caused by a uniform collapse of the building. This can be caused by a mutual pounding effect where two buildings collide upon each other during a earthquake. Or because of too high moving loads by machines and material storage.
Search Methods in USAR 9/1/2008
35
Insufficient bracing can also be a cause for this collapse. A visible aspect is the uniform reduction of height of the building.
3.1.2.2 Pancake collapse – multiple stories
This is the same as a pancake collapse of one storey, the only difference is the amount of stories affected. An example of a pancake like collapse is the World Trade Center (Blanchard 2006).
3.1.3 Debris Heaps
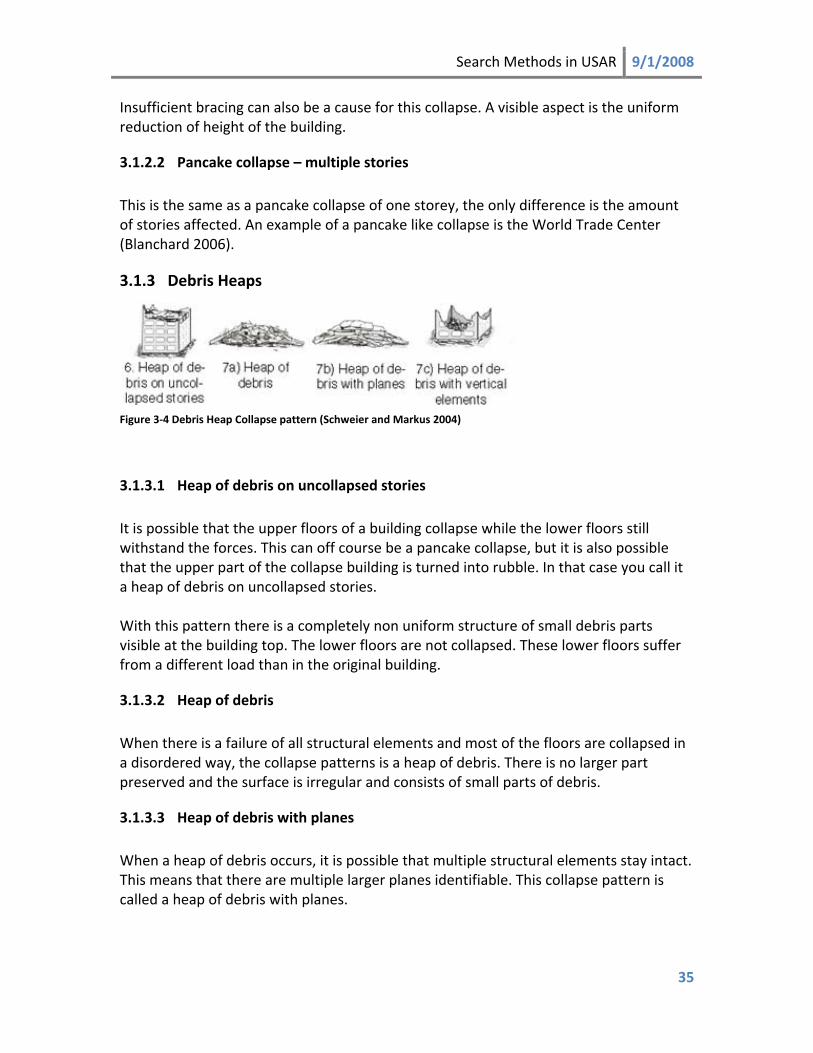
Figure 3‐4 Debris Heap Collapse pattern (Schweier and Markus 2004)
3.1.3.1 Heap of debris on uncollapsed stories
It is possible that the upper floors of a building collapse while the lower floors still withstand the forces. This can off course be a pancake collapse, but it is also possible that the upper part of the collapse building is turned into rubble. In that case you call it a heap of debris on uncollapsed stories. With this pattern there is a completely non uniform structure of small debris parts visible at the building top. The lower floors are not collapsed. These lower floors suffer from a different load than in the original building.
3.1.3.2 Heap of debris
When there is a failure of all structural elements and most of the floors are collapsed in a disordered way, the collapse patterns is a heap of debris. There is no larger part preserved and the surface is irregular and consists of small parts of debris.
3.1.3.3 Heap of debris with planes
When a heap of debris occurs, it is possible that multiple structural elements stay intact. This means that there are multiple larger planes identifiable. This collapse pattern is called a heap of debris with planes.
Search Methods in USAR 9/1/2008
36
3.1.3.4 Heap of debris with vertical elements
An unreinforced masonry building can collapse and still let some vertical elements present in the heap of debris. There are certain height differences recognizable, which are not recognizable in normal debris heaps.
3.1.4 Overturn collapses
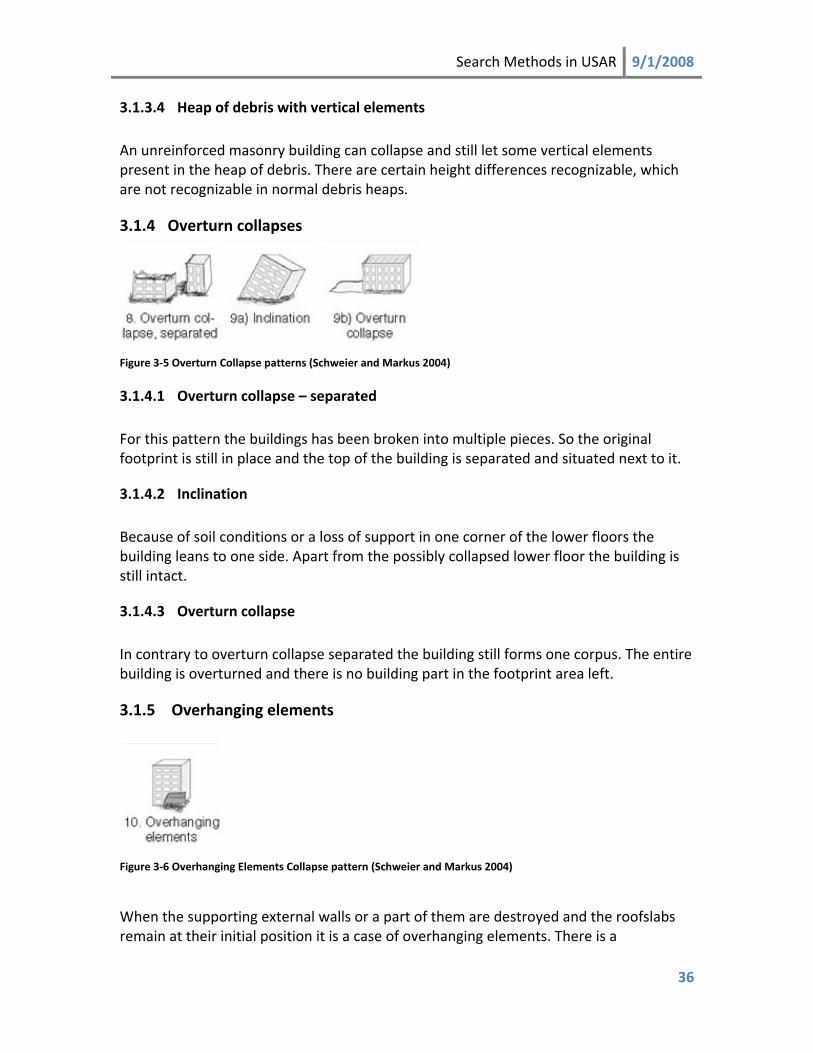
Figure 3‐5 Overturn Collapse patterns (Schweier and Markus 2004)
3.1.4.1 Overturn collapse – separated
For this pattern the buildings has been broken into multiple pieces. So the original footprint is still in place and the top of the building is separated and situated next to it.
3.1.4.2 Inclination
Because of soil conditions or a loss of support in one corner of the lower floors the building leans to one side. Apart from the possibly collapsed lower floor the building is still intact.
3.1.4.3 Overturn collapse
In contrary to overturn collapse separated the building still forms one corpus. The entire building is overturned and there is no building part in the footprint area left.
3.1.5 Overhanging elements
Figure 3‐6 Overhanging Elements Collapse pattern (Schweier and Markus 2004)
When the supporting external walls or a part of them are destroyed and the roofslabs remain at their initial position it is a case of overhanging elements. There is a
Search Methods in USAR 9/1/2008
37
cantilevering slab formed. Such a slab is a floor slab which has an overhanging part. The end of this part is not supported by a wall.
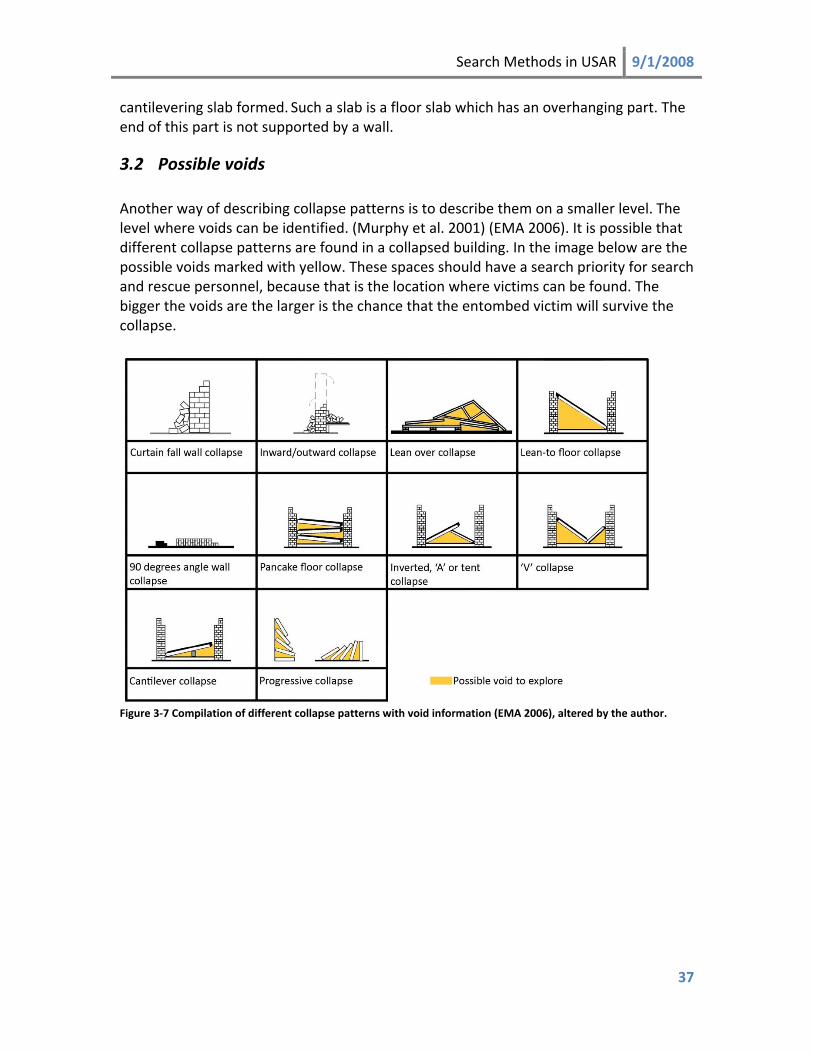
3.2 Possible voids Another way of describing collapse patterns is to describe them on a smaller level. The level where voids can be identified. (Murphy et al. 2001) (EMA 2006). It is possible that different collapse patterns are found in a collapsed building. In the image below are the possible voids marked with yellow. These spaces should have a search priority for search and rescue personnel, because that is the location where victims can be found. The bigger the voids are the larger is the chance that the entombed victim will survive the collapse.
Figure 3‐7 Compilation of different collapse patterns with void information (EMA 2006), altered by the author.

Search Methods in USAR 9/1/2008
38
4 USAR Information sources While searching for victims a lot of senses will be used. One can smell, see, hear and possibly feel a victim. But the human senses are often not good enough and need to be augmented by technology or animals. Our sense of smell is not good enough to find living victims in the rubble. A dog can do just that and is often used in USAR activities (4.2). Our sight is good enough to see victims situated on top of the rubble, but to see in the rubble technology must be used. Pole mounted camera’s are used to look under the rubble (4.3). Robots can be used to extend our sight even further and perhaps use other sensors to collect information (4.5). The best upgrade of our sight can be the through the wall radar (4.6). To upgrade our audition special microphones can be used. Equipment that feels vibrations and is able to sense victims over larger victims are seismic devices (4.4). All these techniques are used while trying to grasp what is going on under the rubble. So the USAR teams are trying to build situation awareness (4.1).
4.1 Situation Awareness In the world we are living in there is a lot of data and the challenge for people is the turn this data into information (Endsley et al. 2003). A key term in this process is situation awareness (SA). It is defined as “The perception of elements in the environment within a volume of time and space, the comprehension of their meaning, and the projection of their status in the near future.” (Endsley 1988). There are three levels of situation awareness defined.
• Level 1 – perception of the elements in the environment (4.1.1) • Level 2 – comprehension of the current situation (4.1.2) • Level 3 – projection of future status (4.1.3)
Having a high level of situation awareness is nice, because you understand the world more thorough, but it is also important. Being able to make better decisions is depending on how well the world is understood. Good decision making will in its turn improve the performance of the process. It is found in a study that 88% of human error was due to problems with situation awareness. So improving human performance can be done by improving the situation awareness.
4.1.1 Level 1 – perception of the elements in the environment “The first step in achieving SA is to perceive the status, attributes, and dynamics of relevant elements in the environment”. (Endsley et al. 2003) The techniques explained in this chapter are designed to perceive the status of the rubble. Some of the techniques are more reliable and precise than other techniques.
Search Methods in USAR 9/1/2008
39
4.1.2 Level 2 – comprehension of the current situation “The second step in achieving good SA is understanding what the data and cues perceived mean in relation to relevant goals and objectives.” (Endsley et al. 2003) Combining the data into information and comprehension is mentally demanding. It requires weighting and prioritizing of the data elements. It requires a good mental model of the situation, which novices or people new to the kind of situation not have. An example of this level of SA in the USAR domain is trying to understand where the victim actually is with the data provided by varies search methods. It might be concluded that a dog signals in a certain area and combined with void information this can mean that the victim is at a certain location.
4.1.3 Level 3 – projection of future status The third level in obtaining SA is understanding how the situation will evolve in the near future. This level of SA cannot be achieved without an accurate understanding of the situation (level 2 SA) and knowledge about the functions and dynamics of the current system. Projection of the future status can be used to cope with the changing environment and have a number of strategies ready which can be put into action fast when the situation needs it. In the USAR domain for example can it be that a victim is found under the rubble but the construction is very instable. While drilling to rescue the victim the structure might give clues about the stability of the building. Using these signals to estimate whether the building will collapse further is a projection based on level 3 SA. It is possible to act with this knowledge and come up with a number of strategies to cope with this problem. Like drilling a hole in another part of the construction or shore the construction to make it safer.
4.2 Dogs The sense of smell of dogs is estimated to be between hundreds and hundreds of thousands better than human sense of smell. This makes a canine very capable of searching scent. The scent of living beings is for the USAR role very important. A canine can be trained to detect this scent. The distance a dog can smell a victim is said to ranges from 400 meters (Pritchard 2008) to 0,3 meters (Murphy 2003). Important factors which determine the distance scent can flow are explained in scent theory (4.2.1). Dogs are used to search large area’s quickly (Bovens et al. 2002) for example during the triage process and while searching for heavily entombed victims (Nuttall 2008). A dog is able to find unconscious victims. Unfortunately a dog is not infallible. A dog can be
Search Methods in USAR 9/1/2008
40
distracted by for example another rescue worker’s scent. The quality of the search also depends on the handler’s ability to interpret the information the dog is providing. To overcome these problems dogs always work in teams of two, where the other dog can serve as a second opinion for the first one. There are roughly two ways a dog can search: free search and systematic or grid search. With free search the dog can search on its own, without the guidance of the dog handler. The dog handler can take over the search when the dog starts to request assistance. Systematic search is there to search an area quickly and efficiently. The handler can direct the dog over a pattern with its hands and body language. Dogs are living beings, require rest and can get injured. Every 24 hours a dog requires a minimum of 6 hours undisturbed rest. A dog can work for a maximum of 20 to 30 minutes at a collapsed structure. Unfortunately the collapsed structures contain sharp objects which can hurt the paws of dogs. Hazardous materials can also reduce the sensing capabilities of the canine.
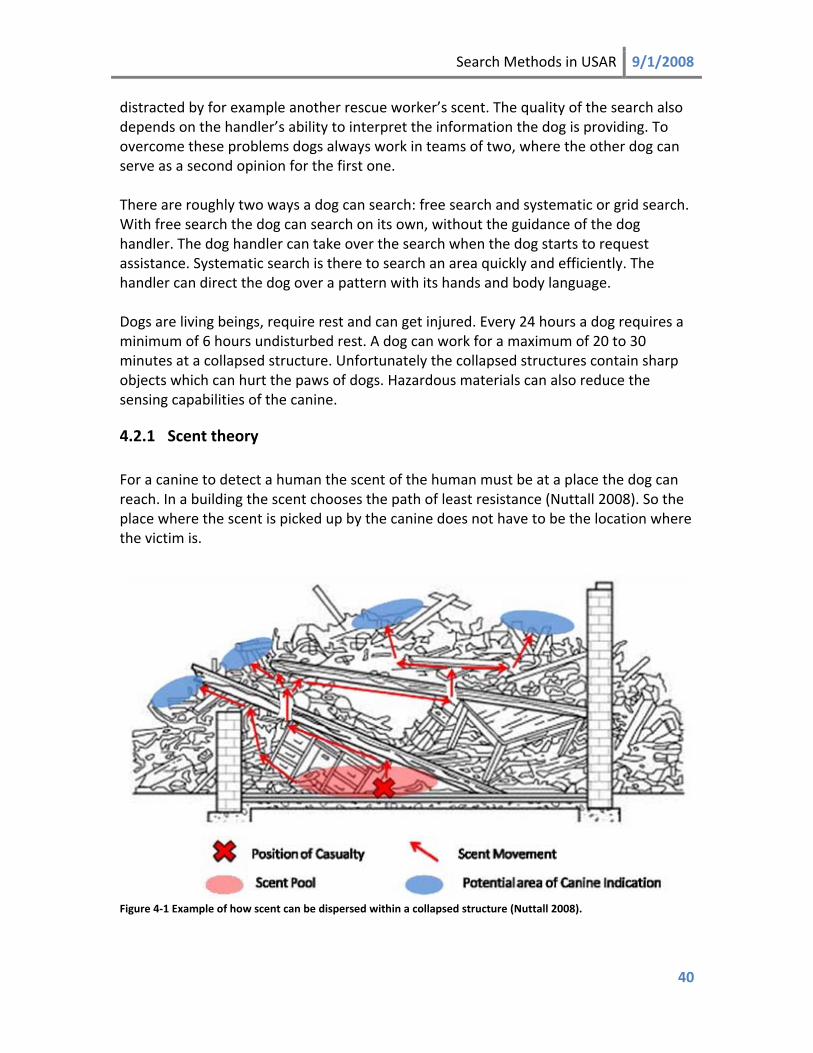
4.2.1 Scent theory For a canine to detect a human the scent of the human must be at a place the dog can reach. In a building the scent chooses the path of least resistance (Nuttall 2008). So the place where the scent is picked up by the canine does not have to be the location where the victim is.
Figure 4‐1 Example of how scent can be dispersed within a collapsed structure (Nuttall 2008).
Search Methods in USAR 9/1/2008
41
The environment can affect the flow of air and thus the location the scent can be picked up by the dog. Important factors are:
• High temperature causes air to rise where cold temperature let the air sink. • Pressure differences causes wind and thus scent transportation. • Wind can cause wind shadows where a pool of scent can form.
The topography of the collapsed buildings can also be a large factor of scent transportation. Scent can get trapped in the building or flow along paths for example created by solidslabs.
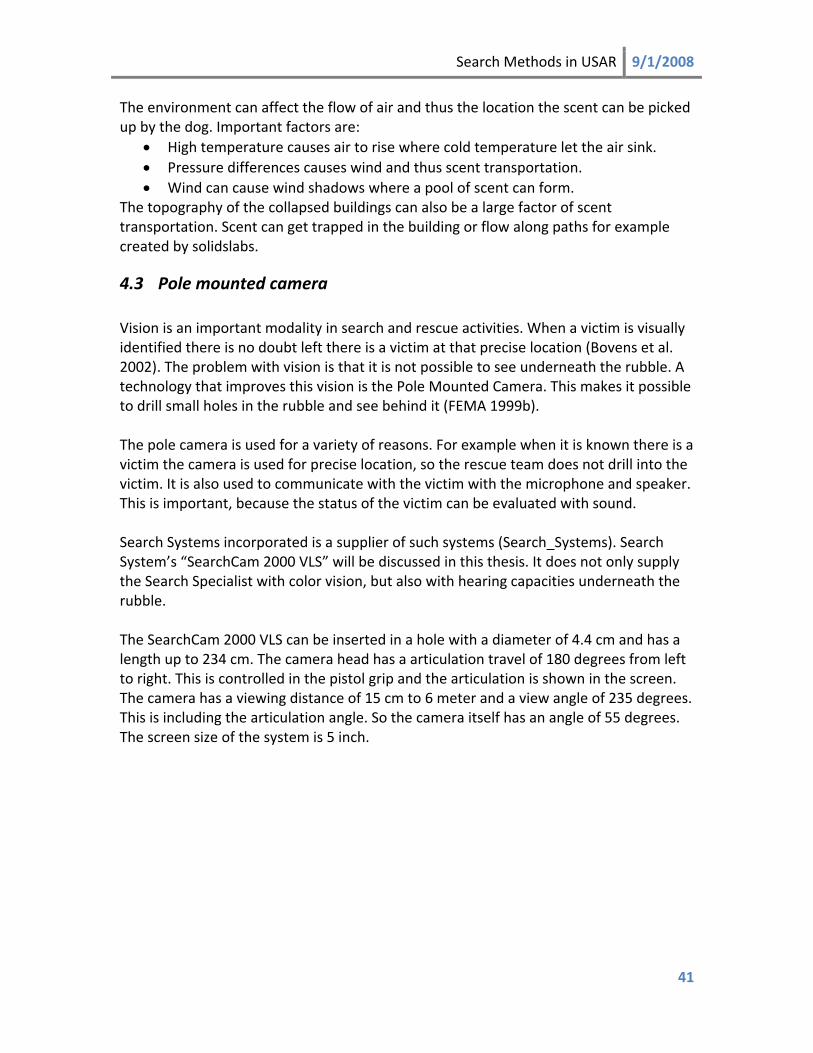
4.3 Pole mounted camera Vision is an important modality in search and rescue activities. When a victim is visually identified there is no doubt left there is a victim at that precise location (Bovens et al. 2002). The problem with vision is that it is not possible to see underneath the rubble. A technology that improves this vision is the Pole Mounted Camera. This makes it possible to drill small holes in the rubble and see behind it (FEMA 1999b). The pole camera is used for a variety of reasons. For example when it is known there is a victim the camera is used for precise location, so the rescue team does not drill into the victim. It is also used to communicate with the victim with the microphone and speaker. This is important, because the status of the victim can be evaluated with sound. Search Systems incorporated is a supplier of such systems (Search_Systems). Search System’s “SearchCam 2000 VLS” will be discussed in this thesis. It does not only supply the Search Specialist with color vision, but also with hearing capacities underneath the rubble. The SearchCam 2000 VLS can be inserted in a hole with a diameter of 4.4 cm and has a length up to 234 cm. The camera head has a articulation travel of 180 degrees from left to right. This is controlled in the pistol grip and the articulation is shown in the screen. The camera has a viewing distance of 15 cm to 6 meter and a view angle of 235 degrees. This is including the articulation angle. So the camera itself has an angle of 55 degrees. The screen size of the system is 5 inch.
Search Methods in USAR 9/1/2008
42
Figure 4‐2 SearchCam 2000 VLS viewing angle
Figure 4‐3 Video footage of victim by a searchcam of USAR.NL (RTL_Nieuws 2008)
4.4 Listen / seismic device To locate the victim by means of sound or vibrations there is equipment to listen very carefully to the faint noises a victim can produce (FEMA 1999a).This equipment usually consists of multiple sensors. It should be possible to switch between sensors to assess which sensor has the highest gain. This sensor with the highest gain will probably be located closest to the victim. It is possible to locate the victim by relocating the sensors around the sensor with the highest gain. The sensors are placed on larger structural parts, because they are the most likely to serve as a good medium for sound. It is advised not to place the sensors according a theoretical search pattern, because it is most important to listen on these large structural elements.

Search Methods in USAR 9/1/2008
43
To be able to pickup sounds of a victim, the victim should be making them and thus be conscious. The victim can be asked to make repetitive sounds with the use of a bull horn. While listening the whole rescue area must be quiet, so the amount of noise is minimized. Because of the noise in the sensor output and the difficulty in interpreting this results there is a need for a second opinion while localizing the victim. So the technical search specialists must work in pairs on this device. Noise is a drawback for this device. The USAR teams have sound signals to ask for silence on the worksite (OCHA 2006b). Even with this silence noise from heavy equipment in nearby areas may interfere with the search results. It might be a good idea to do more research in noise reduction for the sensors. This should make it possible to locate the victim when the worksite is not completely silence.
4.5 Robots There is a lot of research going on to support Urban Search and Rescue teams with robot capabilities. USAR is chosen as domain for the robot research, because it is a challenge in multiple ways. The environment is unpredictable and unstable. It is not possible for a human to reach places a robot can reach. This is because of the size of a human and the possibility of hazards. So the robot serves as an extension of the human. It is still difficult to operate a robot, this makes Human Robot Interaction (HRI) a challenging field (Murphy and Burke 2005). Also interesting is the new robot propulsion techniques which are invented (4.5.1). So a robot can be steered to places a human cannot come. But what can it do there? It can bring sensors into the rubble where other devices cannot come. And so collect information over for example hazardous materials or victim location. Once a victim is found it can do Robot‐Assisted Medical Reachback (RAMR) (Murphy et al. 2004). It is also possible to use robots to automatically stabilize a building, by bringing shoring equipment to certain places. It is possible to let a robot perform some medical actions, where it is not possible for a paramedic to reach the victim (RAMR) . All the robots created by the Center for Robot Assited Search and Rescue (CRASAR) are capable of two way audio. So it is possible to assess whether the victim is conscious and talk with him or her. There are robot sensors to measure CO2 differences around a victim to conclude whether the victim is breathing and thus alive. It is also possible to let a robot bring supplies to a victim. These supplies must be transported in tubes. So it is possible to bring fluids (food or drinks) or gasses (air).
Search Methods in USAR 9/1/2008
44
A robot can be used as an extension of a pole mounted camera(Casper and Murphy 2003). So it is possible to see where a human cannot see. The range of robot is much further than the 2.35 meters a pole mounted camera can reach. For this use and for navigation the robot must have a camera on board. This must be a color camera, because “anything that isn’t gray is important to look at” (CRASAR 2008). Pursuit vision, a kind of active night vision, seems very useful as well. Heat vision can also be useful. When a robot has found a victim it is useful to be able to communicate with the victim. For this reason two way audio is build in into crasar’s robots (CRASAR 2008). All these sensors are designed to make teleoperation possible. There are number of issues known with teleoperation, including time delay, sensing and display difficulties (diminished depth perception, camera viewpoint and the lack of proprioceptive feedback), communication bandwidth, operation safety & errors, and operator training. These problems are not due to navigate in the environment, but it is rather difficult to build and maintain situation awareness (Murphy and Burke 2005). The robot is only operated 51% of the time, in the other part are the operators trying to determine what they are looking at. It was difficult for the operators during the World Trade Center response to determine where the robot actually was in the rubble (Casper and Murphy 2003). An information source for the rescuers was the length of the tether line in the building. For a human is it difficult to build situation awareness in this domain. In field studies it was found that 60% of robot operator communications where related to building situation awareness and only 28% was pertained to activities using situation awareness. It was also found that rescue teams with a high situation awareness where nine times as likely to find victims as rescue teams with low situation awareness. Since it is so difficult for a human to create situation awareness, this is even harder or impossible (at this date) for autonomous robot perception (Murphy and Burke 2005). It is important to know for an incident leader what a robot has found in the rubble. Currently the robot provides information to only the operator. During the World Trade Center response this information was shared by the operators manually. Often the information needed by the incident commander took 12 hours to get there. So “INTF‐1 task force leader, Justin Reuter, requested the development of an Incident Commander laptop that could display maps of who was working where and provide updated event information”. (Casper and Murphy 2003) USAR operations are a challenge for robot scientists, because there are a lot of demands on the robot to be able to survive (CRASAR 2008). It must work in all extreme weather conditions and at day and night. Another important thing is communication with the robot. Wireless communication may fail and decreases the trust rescue workers have in robots (Casper and Murphy 2003). That is why robots often use a tether line to connect the robot with the controls. There are more requirements opposed by the situation a building can be in. There may be:
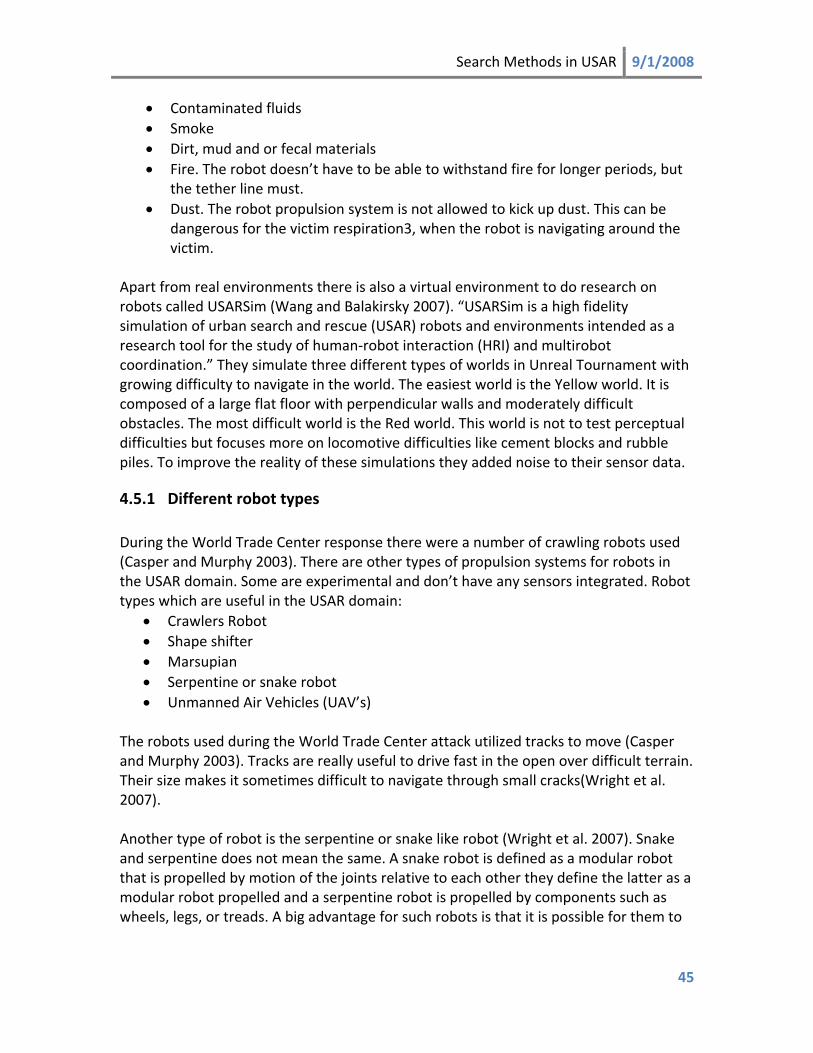
Search Methods in USAR 9/1/2008
45
• Contaminated fluids • Smoke • Dirt, mud and or fecal materials • Fire. The robot doesn’t have to be able to withstand fire for longer periods, but
the tether line must. • Dust. The robot propulsion system is not allowed to kick up dust. This can be
dangerous for the victim respiration3, when the robot is navigating around the victim.
Apart from real environments there is also a virtual environment to do research on robots called USARSim (Wang and Balakirsky 2007). “USARSim is a high fidelity simulation of urban search and rescue (USAR) robots and environments intended as a research tool for the study of human‐robot interaction (HRI) and multirobot coordination.” They simulate three different types of worlds in Unreal Tournament with growing difficulty to navigate in the world. The easiest world is the Yellow world. It is composed of a large flat floor with perpendicular walls and moderately difficult obstacles. The most difficult world is the Red world. This world is not to test perceptual difficulties but focuses more on locomotive difficulties like cement blocks and rubble piles. To improve the reality of these simulations they added noise to their sensor data.
4.5.1 Different robot types During the World Trade Center response there were a number of crawling robots used (Casper and Murphy 2003). There are other types of propulsion systems for robots in the USAR domain. Some are experimental and don’t have any sensors integrated. Robot types which are useful in the USAR domain:
• Crawlers Robot • Shape shifter • Marsupian • Serpentine or snake robot • Unmanned Air Vehicles (UAV’s)
The robots used during the World Trade Center attack utilized tracks to move (Casper and Murphy 2003). Tracks are really useful to drive fast in the open over difficult terrain. Their size makes it sometimes difficult to navigate through small cracks(Wright et al. 2007). Another type of robot is the serpentine or snake like robot (Wright et al. 2007). Snake and serpentine does not mean the same. A snake robot is defined as a modular robot that is propelled by motion of the joints relative to each other they define the latter as a modular robot propelled and a serpentine robot is propelled by components such as wheels, legs, or treads. A big advantage for such robots is that it is possible for them to
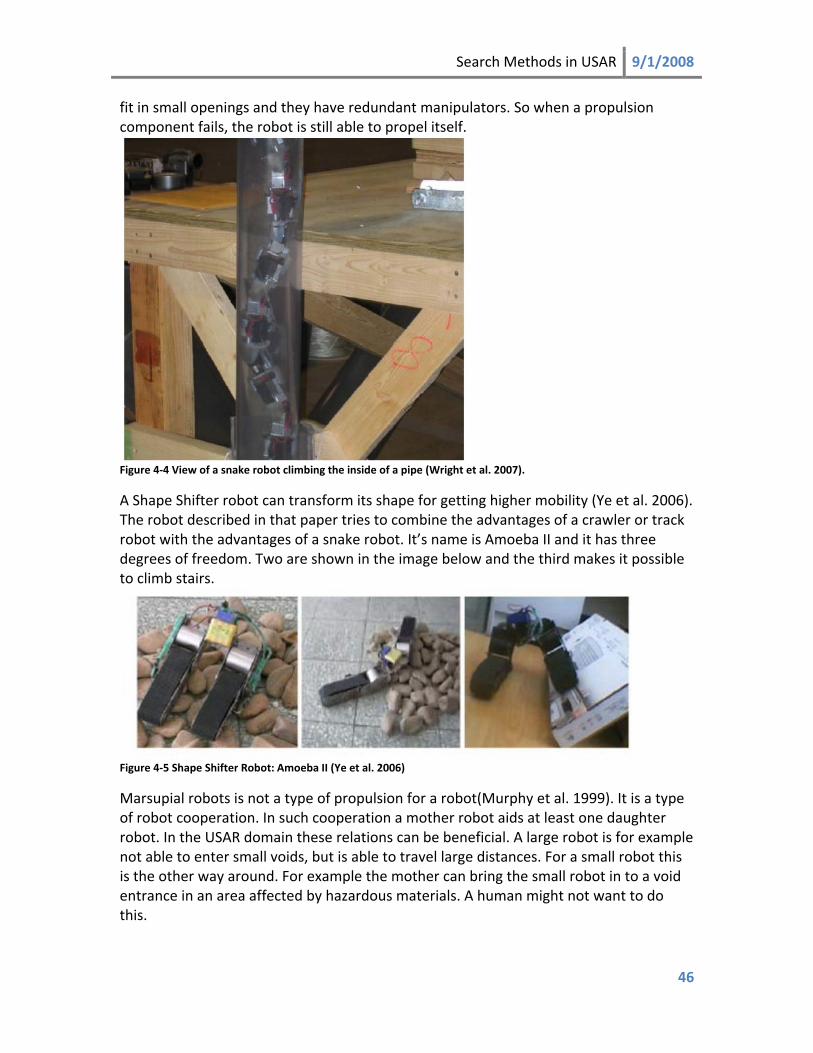
Search Methods in USAR 9/1/2008
46
fit in small openings and they have redundant manipulators. So when a propulsion component fails, the robot is still able to propel itself.
Figure 4‐4 View of a snake robot climbing the inside of a pipe (Wright et al. 2007).
A Shape Shifter robot can transform its shape for getting higher mobility (Ye et al. 2006). The robot described in that paper tries to combine the advantages of a crawler or track robot with the advantages of a snake robot. It’s name is Amoeba II and it has three degrees of freedom. Two are shown in the image below and the third makes it possible to climb stairs.
Figure 4‐5 Shape Shifter Robot: Amoeba II (Ye et al. 2006)
Marsupial robots is not a type of propulsion for a robot(Murphy et al. 1999). It is a type of robot cooperation. In such cooperation a mother robot aids at least one daughter robot. In the USAR domain these relations can be beneficial. A large robot is for example not able to enter small voids, but is able to travel large distances. For a small robot this is the other way around. For example the mother can bring the small robot in to a void entrance in an area affected by hazardous materials. A human might not want to do this.

Search Methods in USAR 9/1/2008
47
The mother robot can have different roles in the relationship. The mother can be a Coach, Manager, Messenger or Courier for one or more daughter robots. As a coach the mother robot can actively aid the dispensed daughter robots, by providing sensor information. If the mother has a manager role then she will do all processing for the daughters. As messenger the robot will only bring the daughter robots to their point of deployment and relay information to somewhere else. The courier role is the simplest role where the mother only brings the daughters to their point of deployment. Apart from ground robots there are also aerial robots or unmanned air vehicles (UAV’s) being developed (Onosato et al. 2006). The intended purpose of these robots in the USAR domain varies from independent damage estimation in the first hours of a disaster to victim search in the debris. Independent damage estimation is intended to be independent from human intelligence, but this must be made possible first. This research topic is discussed in (Schweier and Markus 2006). They use laser data before and after the disaster to calculate the damage. It is also proposed to detect victims by locating their mobile phone (Takemura et al. 2005).
4.6 Through Wall Radar The through the wall radar is a low frequency radar (Don 2008). The design of this system is followed with great interest by the USAR society. The system is able to detect and persons through two walls at a distance of 150 meters. These persons can be localized in a 3d position. Another through the wall radar, primarily made for the law Enforcement, is able to “detects motion as slight as breathing” (Miles 2007). This makes it possible to assess whether the victim is still alive and thus help the USAR team to rescue only living victims. The device makes it possible to see through more than 30 cm of concrete.

Search Methods in USAR 9/1/2008
48
5 Theoretical models This chapter is meant to give an introduction to two other research areas where environments are searched with incomplete information. It provides the reader with some background and makes it possible to decide whether the theory can be applied to the urban search and rescue domain. The first research domain is that of Foraging Theory which studies animals while searching for food (5.1). Another domain is the domain of Search and Rescue and the theory behind it is called Search Theory. This theory describes measures to efficiently search for an object which is gone missing (5.2).
5.1 Foraging Theory Foraging for animals is all about collecting as much energy as possible in the least possible time. For this case there are three elements. The one who is eating, for the rest of the story this actor is called: the forager, and its food elements. The third element is a group of food elements called a patch. A forager wants to consume enough food, but first it has to find the elements. This costs time and energy, called the search cost. When a food element has been found it can be eaten. Again this comes for a price: the handling cost, but also with a reward the energy gained. The goal of the forager is to collect as much energy as possible in the least possible time or lowest costs. This way it has time to deal with the other important things in life, which will not be discussed here. It can also eat more than its daily upkeep and grow. To do so it needs to make choices. Will it hunt trough the night or only with daylight? How will it harvest the food elements? These kinds of choices are not discussed here. The choice we are going to discuss is whether it is profitable to eat a certain types of food element. Foraging is a chance game. What will the expected value be when eating this food element or when the forager is going to search further hoping to find a more profitable food element to eat? Basically when eating food elements in a patch you lose the opportunity to eat other food elements in another patch, which have a higher gain or lower handling time. But it is not certain the other patch is really there or that it will be found. When a forager knows the place it is foraging in it will be more able to make well reasoned choices. So a forager can stay in an area it knows or first do some reconnaissance. This reconnaissance is not for free, but it reduces the amount of uncertainty in the world. Such an investigation is worthwhile to the extend it gives the forager a higher expected energy outcome. (Stephens and Krebs 1986)
5.1.1 Foraging Models This chapter will discuss two foraging models, developed to make the choice whether the forager is going to eat that type of food element (prey model) (5.1.1.2) and how
Search Methods in USAR 9/1/2008
49
long it may be busy on eating this food element (patch model) (5.1.1.3). The basis of these foraging models is the Holling’s disk equation (5.1.1.1). According to (Stephens and Krebs 1986) a foraging model must contain three things:
1. Decision assumptions 2. Currency assumptions 3. Constraint assumptions
For a model which describes behavior its needed that the animal can choose between different options (decision assumption). These choices must be validated by maximizing or minimizing something (currency assumption). Unfortunately an animal must cope with its limitations (constraint assumption). Decisions can be taken independent or dependent on earlier decisions. For example deciding not to eat today will leave the animal weaker the next day and it might not be able to travel large distances the next day. So the next set of possible choices for the animal is dependent. This is the case in a dynamic foraging model. For simplicity there are also static foraging models where the choices not depend on each other. As stated earlier the choices must be validated by some sort of currency. The currency can be chosen a priori: the currency is then described as the variable the animals wants. An example of such a currency is the amount of energy gained from eating or the chance of being eaten. It is also possible to describe the currency a posteriori. This means that the variable which is optimized is the currency. So for example running speed is a posterior variable. Being able to run fast maximizes the energy gain or minimizes the chance of being eaten. So the a posteriori currency optimizes the currency which would be chosen a priori. Optimizing can be done in different ways. The currency variable can be maximized (for food), minimized (the chance of being eaten) or stabilized (food income over a year). For a model it is possible to optimize the currency in a given time or optimize the time needed to get a certain amount of currency. Unfortunately optimizing a currency is bounded by a number of constraints. These limitations can be intrinsic, meaning limitations in the abilities of the animal or limitations in the tolerances of the organism. There are also extrinsic constraints. These are given by the environment.
5.1.1.1 Holling’s Disc equation The basis for a number of foraging models is the Hollings Disc equation. It describes the te of energy gain (Brodin): ra
= time spend searching

Search Methods in USAR 9/1/2008
= net energy gain during foraging ( )
50
the rate of energy gain.
= time spend handling prey
=
(5.1)
Th
= encounter rate (prey items / time unit)
is can be rewritten with other variables:
= search cost per time unit = average gain per encounter
ge time of an encounter = avera handling
1
(5.2)
5.1.1.2 Prey model The central question the prey model answers is “When prey is encountered eat it or continuo searching for other prey”. To be able to calculate this, an animal needs to know a lot of its environment. What are the prey types it can encounter and what is for each prey type: the average handling time, average gain and average encounter rate. To incorporate this prey type in the diet of the hunter the gain per time unit must be higher than the average gain per time unit of the rest of its diet (keeping in mind the encounter te of the diet). This can be shown with math. ra
= expected net energy gain for a prey type i
= the gained energy minus the handling cost of prey type i = handling time of prey type i = the chance prey type i will be attacked on encounter = the rate of energy gain.
= search cost per time unit = encounter rate of a prey type i
(5.3)
Formula (5.3) shows that the expected net energy gain also incorporate for the loss it would normally have when not handling the prey type but going on searching.

Search Methods in USAR 9/1/2008
1
51
(5.4)
Formula (5.4) shows the energy gain per time unit for an animal foraging in a habitat with only one prey type. Off course it is possible to live in an environment with multiple prey ty s: pe
∑∑ 1 (5.5)
(5.6)
Energy per time unit for a prey type i is described by formula (5.6). This formula is independent of the encounter rate. So what is the energy a prey can deliver when encountered per time unit. This is a measure to calculate whether the prey type should be incorporated into the diet. The algorithm for calculating the diet of an animal: 1) Sort prey types on the value of (5.6) 2) Add the best prey type 3 = numbe of prey types already in diet
) Keep adding prey types as long as equation (5.7) holds.
r
∑1 ∑
(5.7)
The result of this model is that a prey type in a given habitat is always or never eaten on encounter. This is because of the lost opportunity to eat better prey type when handling an inferior type. The inclusion of prey is independent of the encounter rate. However, it is dependent on the encounter rate of more profitable prey types.
5.1.1.3 Patch model The patch model is a foraging model which answers the fundamental question when to leave a patch. For example when a lion has killed a gnoe it can eat all the flesh, but trying to eat the smallest bits from the bones, will have a lower energy per time unit rate. So it is better at some point to leave the carcass and try to find new prey. For the patch model it is already decided that a patch will be entered by the foraging animal. This can be decided by the prey model, as is done in the combined prey/patch model which is not described in this thesis.
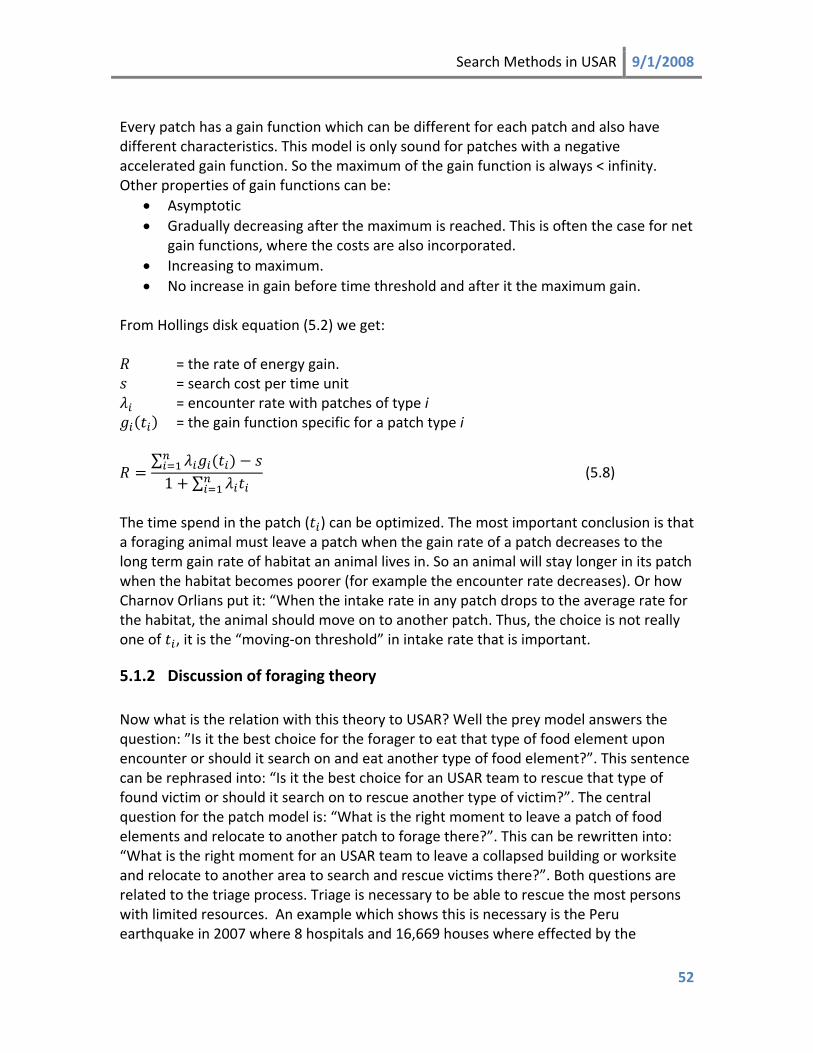
Search Methods in USAR 9/1/2008
52
Every patch has a gain function which can be different for each patch and also have different characteristics. This model is only sound for patches with a negative accelerated gain function. So the maximum of the gain function is always < infinity. Other properties of gain functions can be:
• Asymptotic • Gradually decreasing after the maximum is reached. This is often the case for net
gain functions, where the costs are also incorporated. • Increasing to maximum. • No increase in gain before time threshold and after it the maximum gain.
Fr
= the rate of energy gain.
om Hollings disk equation (5.2) we get:
= search cost per time unit = encounter rate with patches of type i
= ction specific for a patch type i the gain fun
∑1 ∑ (5.8)
The time spend in the patch ( ) can be optimized. The most important conclusion is that a foraging animal must leave a patch when the gain rate of a patch decreases to the long term gain rate of habitat an animal lives in. So an animal will stay longer in its patch when the habitat becomes poorer (for example the encounter rate decreases). Or how Charnov Orlians put it: “When the intake rate in any patch drops to the average rate for the habitat, the animal should move on to another patch. Thus, the choice is not really one of , it is the “moving‐on threshold” in intake rate that is important.
5.1.2 Discussion of foraging theory Now what is the relation with this theory to USAR? Well the prey model answers the question: ”Is it the best choice for the forager to eat that type of food element upon encounter or should it search on and eat another type of food element?”. This sentence can be rephrased into: “Is it the best choice for an USAR team to rescue that type of found victim or should it search on to rescue another type of victim?”. The central question for the patch model is: “What is the right moment to leave a patch of food elements and relocate to another patch to forage there?”. This can be rewritten into: “What is the right moment for an USAR team to leave a collapsed building or worksite and relocate to another area to search and rescue victims there?”. Both questions are related to the triage process. Triage is necessary to be able to rescue the most persons with limited resources. An example which shows this is necessary is the Peru earthquake in 2007 where 8 hospitals and 16,669 houses where effected by the
Search Methods in USAR 9/1/2008
53
earthquake and the amount of USAR personnel was 55 people (OCHA 2007a) (OCHA 2007b). The Holling’s Disc equation (5.1.1.1), which is the basis of the explained foraging models, nsists of a number of elements, which can be rewritten in USAR terms. co
= encounter rate (victims/ time unit)
= search cost per time unit = average gain per victim
= average handling time of a victim = the rate of victims rescued.
It is difficult to estimate the variables such as the encounter rate or the handling time of a victim and they are different for different kind of victims. But there are methods to estimate these variables see section 3.1. The research explained tries to estimate the amount of victims in a collapsed building and the handling time per type of victim. An USAR team wants to maximize the amount of victims rescued, so the rate of victims rescued. It is in this model possible to discriminate between different types of victims by the variable: “average gain per victim”. Of course there are ethical issues with this type of discrimination. Another type of assessment is to discriminate between victims with different handling times. This type of discrimination makes it for example possible to rescue a larger number of easier to rescue victims and so maximizes the rate of victims rescued. The result of the prey model is that some food elements are always eaten and some food elements are never eaten, because the never eaten food elements bring in less gain per time unit than expected from the food elements which are eaten. Translating this to terms in USAR, the prey model can be a way to formalize the decision on what the maximum time is a USAR team may expect to spend on a single victim. This is only sound when the victims are not discriminated by the gain per victim variable. The patch model’s conclusion is: “When the intake rate in any patch drops to the average rate for the habitat, the animal should move on to another patch”. This is in USAR terms when the time to find and rescue a victim in a worksite is the same as the time to find and rescue a victim of the whole area where the team is working in the team should move to another worksite. Again this is only sound when the victims are not discriminated by the gain per victim variable.
5.2 Search and Rescue Search Theory
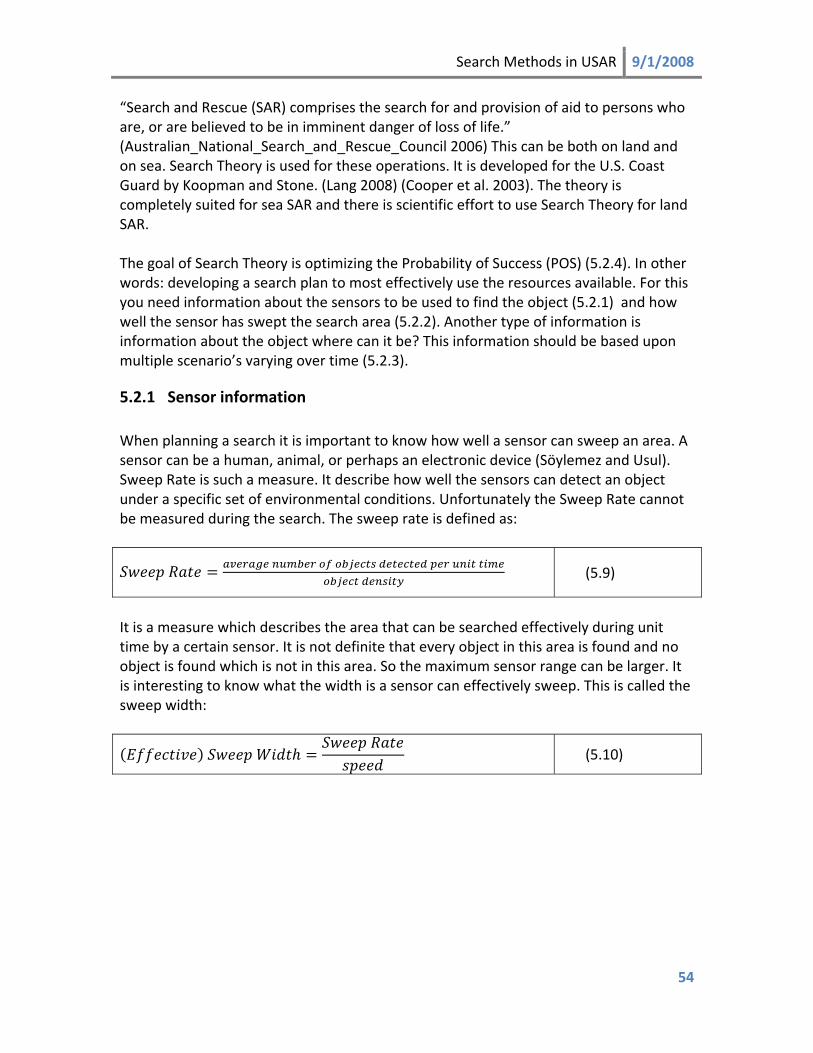
Search Methods in USAR 9/1/2008
54
“Search and Rescue (SAR) comprises the search for and provision of aid to persons who are, or are believed to be in imminent danger of loss of life.” (Australian_National_Search_and_Rescue_Council 2006) This can be both on land and on sea. Search Theory is used for these operations. It is developed for the U.S. Coast Guard by Koopman and Stone. (Lang 2008) (Cooper et al. 2003). The theory is completely suited for sea SAR and there is scientific effort to use Search Theory for land SAR. The goal of Search Theory is optimizing the Probability of Success (POS) (5.2.4). In other words: developing a search plan to most effectively use the resources available. For this you need information about the sensors to be used to find the object (5.2.1) and how well the sensor has swept the search area (5.2.2). Another type of information is information about the object where can it be? This information should be based upon multiple scenario’s varying over time (5.2.3).
5.2.1 Sensor information When planning a search it is important to know how well a sensor can sweep an area. A sensor can be a human, animal, or perhaps an electronic device (Söylemez and Usul). Sweep Rate is such a measure. It describe how well the sensors can detect an object under a specific set of environmental conditions. Unfortunately the Sweep Rate cannot be measured during the search. The sweep rate is defined as:
(5.9)
It is a measure which describes the area that can be searched effectively during unit time by a certain sensor. It is not definite that every object in this area is found and no object is found which is not in this area. So the maximum sensor range can be larger. It is interesting to know what the width is a sensor can effectively sweep. This is called the sweep width:
(5.10)
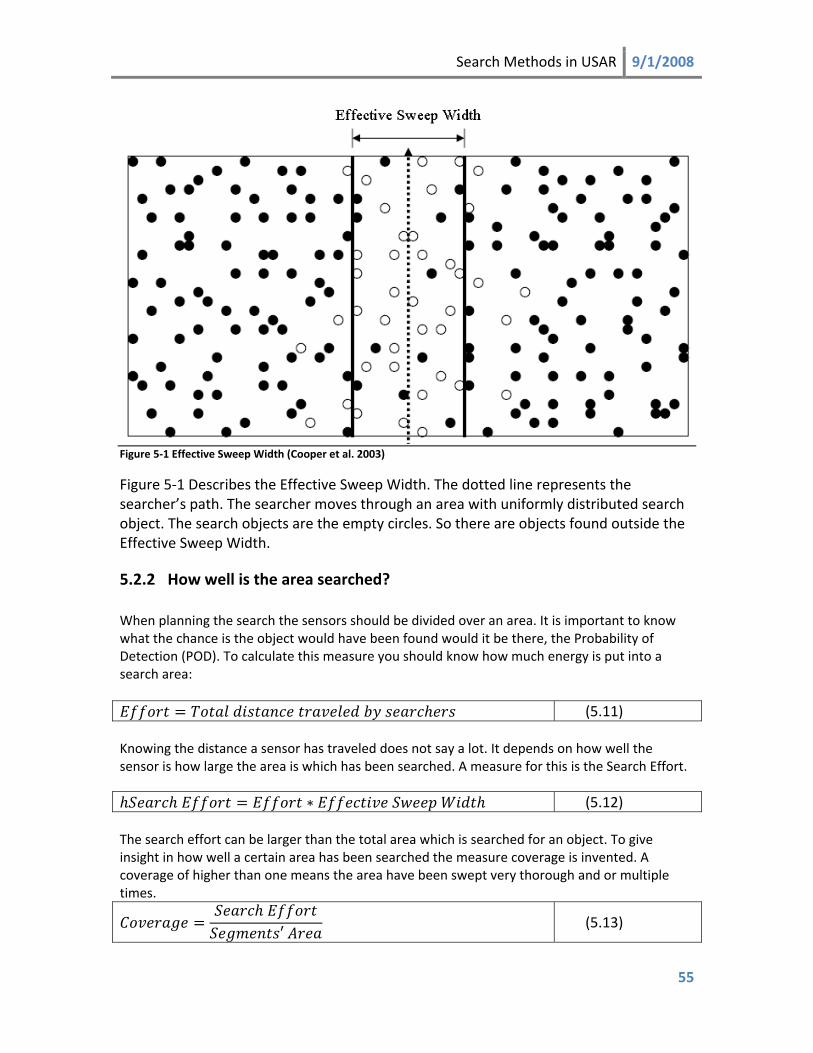
Search Methods in USAR 9/1/2008
55
Figure 5‐1 Effective Sweep Width (Cooper et al. 2003)
Figure 5‐1 Describes the Effective Sweep Width. The dotted line represents the searcher’s path. The searcher moves through an area with uniformly distributed search object. The search objects are the empty circles. So there are objects found outside the Effective Sweep Width.
5.2.2 How well is the area searched? When planning the search the sensors should be divided over an area. It is important to know what the chance is the object would have been found would it be there, the Probability of Detection (POD). To calculate this measure you should know how much energy is put into a
r :search a ea (5.11) Knowing the distance a sensor has traveled does not say a lot. It depends on how well the
w asure for this is the Search Effort. sensor is how large the area is hich has been searched. A me
The search effort can larger than the total area which is seabe rched for an object. To give insight in how well a certain area has been searched the measure coverage is invented. A coverage of high s the area have been swept very thorough and or multiple er than one meantimes.
(5.13)
(5.12)
Search Methods in USAR 9/1/2008
56
The Probability of Detection is the probability of the search object being detected, assuming it was in the areas that were searched (Australian_National_Search_and_Rescue_Council 2006). It is not the goal of the search
er system activities. It is just an element in a larg 1 (5.14)
5.2.3 Object information When there is more information on the whereabouts of the object the search can be better directed to it. To give information about these whereabouts the Probability of Area (POA) is invented. It is the probability that a geographically bounded area contains the search object. It is related to the probability density distribution (Pden) of the location of the object.
(5.15)
Estimating the probability density is an important and difficult task for the search team. The object must first be profiled. In land sar operations this can be a lost person. Often people from a certain group act a certain way. In sea sar operations the current and wind speed are important measures to take into account while searching for a lost craft. (Söylemez and Usul) describes a case of a lost aircraft where multiple clues where used to create one probability density map.
5.2.4 Success measure The probability of success (POS) is the probability to optimize. It is the probability the search object was in the area at the time the search took place times the probability the
een detected when it was there. object would have b (5.16)
5.2.5 Discussion of Search Theory for the USAR domain SAR is different from USAR. SAR is searching in a large area for a person who is lost. The person wants to be found and is visible from a distance. In USAR the person also wants to be found, but it is not visible from a large distance. The area where the person can be found in is also relatively small. So in USAR is the type of environment the difficulty where in SAR the size of the environment is the difficulty.
Search Methods in USAR 9/1/2008
57
To be able to apply search theory to the USAR domain it is important to notice that the environment is 3d and the sensors only penetrate the building to a certain extent. The sweep rate is an important factor in the theory, which is for some type of sensors easier to calculate than for other type of sensors:
• Dogs search the surface of the collapsed buildings for living human scent and the disguisable scent travels over a certain distance. This can be used to calculate the sweep rate.
• For the pole mounted camera it is more difficult, because the camera can look under certain parts of the building while it cannot see other parts. It is also possible that building elements are blocking the view. So the range of the sensor varies a lot, which makes calculating the sweep rate really difficult.
• Microphones will have a more predictable sweep width, because the range of the microphone is more consistent.
Another element of the search theory is the POA. This is depending on the probability density that a victim will be in a location. This can be estimated by information from voids and information from bystanders, but must be calculated into 3d. So it is probably possible to develop search theory for the USAR domain, but it will be a huge challenge to try to calculate the sweep rate for the different sensors. However the question arises whether it is useful to formalize the search method in the USAR domain.
Search Methods in USAR 9/1/2008
58
6 Conclusion While searching the personnel of USAR teams make a lot of effort to see in the collapsed building. The current search methods utilized are dogs, pole mounted cameras, microphones, bystander information, and sometimes robots to see deeper and deeper in the collapsed buildings. Every search method is to augment different human senses.
• Dogs augment the sense of smell of a human and can find living victims; • Pole mounted camera’s let the searcher see at places which would normally not
been seen. For example, after a small hole is made the searcher can utilize this type of camera to see behind a slab of reinforced concrete.
• Microphones and seismic equipment is utilized to hear sound or detect vibrations a victim can make when the victim is conscious. The range of this equipment varies from 7 to 25 meters.
• Bystander information is utilized by the searchers to direct the search effort. Bystanders can provide information for example on whether there where sounds from a victim at a certain location.
• Robots are employed to bring sensors deeply in the rubble. A camera can be such a sensor. Robots are not a standard search method employed by USAR teams, but they saw action at the World Trade Center collapse.
One of the problems of USAR teams is that they cannot see through a pile of rubble and locate living victims. All the explained search methods are developed to be able to achieve through the rubble vision as good as possible. A solution for this problem is the through the wall radar. It provides the rescuers with vision through 30 cm of concrete and the possibility to assess whether the victim is still alive. The search to go deeper and deeper with the use of microphones is difficult, because the worksite should be completely silent. Heavy equipment working on nearby areas can add noise to the search results. This is a problem. A solution might be noise reduction. This should make it possible to find victims in a worksite which is not completely silent. With robots it is possible to go deeply in the rubble and search there for victims with the sensors a robot carries. Knowing where the robot is at that moment is a problem for robot drivers. This is important, because when a victim is found you only know there is a victim, but the actual position is also important to make a plan to excavate the victim. Trying to map the collapsed building can be a solution to aid the driver in creating situation awareness underneath the rubble. Of course this map should only be used when the situation requires it and the time spend on creating the map is worth it. Such a map can also help incident command with its request for information. For the incident commanders it is important to know what their people are doing and how they
Search Methods in USAR 9/1/2008
59
can support them. A problem is that sometimes the needed information takes 12 hours to reach the decision makers. Of course it is not important for them to know how deep the robot is, but it is for example important to know how many victims are found. This makes it possible to plan the rest of the operation and possibly request for medical personnel to the sight. A less strong option of the map is to support the search and rescue group commander with a way to formalize the search. It can be possible to write down every search effort in a map and let the map come up with search advice and a probability density map, where victims can be. In this way the search theory of SAR operations can be mapped upon the USAR operations. And possibly provide the commander with a tool to assess how well a worksite has been searched and to provide new search options, which are most likely to have success. Luckily the scenario described in the introduction, where an earthquake was going to strike in about four hours, was just fiction. Hopefully this thesis has provided the reader with knowledge about how earthquake response will occur and will provide the reader with ideas to improve this response.

Search Methods in USAR 9/1/2008
60
List of Figures FIGURE 1‐1FLOW OF REPORT ......................................................................................................................... 9 FIGURE 2‐1 INTERNATIONAL AID ORGANIZATIONS (OCHA 2006A). ............................................................ 12 FIGURE 2‐2 UN INSARAG METHODOLOGY CYCLE (OCHA 2006) BY (BEERENS 2007) ................................... 14 FIGURE 2‐3 TRAPPED VICTIM SURVIVAL RATE. (MURPHY ET AL. 2001) ....................................................... 16 FIGURE 2‐4 BUILDING MAP ACCORDING TO INSARAG GUIDELINES ............................................................ 21 FIGURE 2‐5 USAR.NL(BOVENS ET AL. 2002) ................................................................................................. 22 FIGURE 2‐6 USAR TEAM ................................................................................................................................ 24 FIGURE 3‐1 COMPILATION OF DAMAGE TYPES (SCHWEIER AND MARKUS 2004) ....................................... 32 FIGURE 3‐2 INCLINED LAYER COLLAPSES (SCHWEIER AND MARKUS 2004) ................................................. 33 FIGURE 3‐3 PANCAKE COLLAPSE PATTERNS (SCHWEIER AND MARKUS 2004) ............................................ 34 FIGURE 3‐4 DEBRIS HEAP COLLAPSE PATTERN (SCHWEIER AND MARKUS 2004) ........................................ 35 FIGURE 3‐5 OVERTURN COLLAPSE PATTERNS (SCHWEIER AND MARKUS 2004) ......................................... 36 FIGURE 3‐6 OVERHANGING ELEMENTS COLLAPSE PATTERN (SCHWEIER AND MARKUS 2004) .................. 36 FIGURE 3‐7 COMPILATION OF DIFFERENT COLLAPSE PATTERNS WITH VOID INFORMATION (EMA 2006),
ALTERED BY THE AUTHOR. .................................................................................................................. 37 FIGURE 4‐1 EXAMPLE OF HOW SCENT CAN BE DISPERSED WITHIN A COLLAPSED STRUCTURE (NUTTALL
2008). .................................................................................................................................................. 40 FIGURE 4‐2 SEARCHCAM 2000 VLS VIEWING ANGLE ................................................................................... 42 FIGURE 4‐3 VIDEO FOOTAGE OF VICTIM BY A SEARCHCAM OF USAR.NL (RTL_NIEUWS 2008) ................... 42 FIGURE 4‐4 VIEW OF A SNAKE ROBOT CLIMBING THE INSIDE OF A PIPE (WRIGHT ET AL. 2007). ............... 46 FIGURE 4‐5 SHAPE SHIFTER ROBOT: AMOEBA II (YE ET AL. 2006) ............................................................... 46 FIGURE 5‐1 EFFECTIVE SWEEP WIDTH (COOPER ET AL. 2003) ..................................................................... 55

Search Methods in USAR 9/1/2008
61
List of Tables TABLE 2‐1 TRIAGE CATEGORIES (OCHA 2006) .............................................................................................. 17 TABLE 2‐2 DIFFERENCE IN FLOOR ANNOTATION BETWEEN INSARAG GUIDELINES AND USAR.NL .............. 27 TABLE 3‐1 INFORMATION ESTIMATED FROM A COLLAPSE PATTERN. ........................................................ 33
Search Methods in USAR 9/1/2008
62
Works Cited Australian_National_Search_and_Rescue_Council (2006). National Search and Rescue Manual. Canberra Blanchard, B. (2006). A critical analysis of the collapse of wtc towers 1, 2 & 7 from an explosives and conventional demolition industry viewpoint Bovens, H., J. v. d. Broek and d. A. Wiegant (2002). Handleiding USAR.NL. M. B. Z. K. Brodin, A. "Optimal foraging theor y." Retrieved 16 july, 2008, from http://www.teorekol.lu.se/~abrodin/TEK290/OFT.pdf. Bron, J. (2004). "Marokko: Situatierapport 2." Retrieved 02-April, 2008, from http://www.usar.nl/nieuws/46. Casper, J. and R. Murphy (2003) Human-Robot Interactions during the Robot-Assisted Urban Search and Rescue Response at the World Trade Center. Volume, 45 DOI: 10.1.1.58.7019 Cooper, D. C., J. R. Frost and R. Q. Robe (2003). Compatibility of Land SAR Procedures with Search Theory. Washington, D. C., U.S. Department of Homeland Security United States Coast Guard. CRASAR. (2008). "Robots for Search and Rescue." Retrieved 24th June, 2008, from http://crasar.csee.usf.edu/rescuerobots/robots.htm. Don, J. A. (2008). Thema Maatschappelijke Veiligheid Verkennend TNO-onderzoek Highlights 2007. EMA (2006). General and Disaster Rescue. Dickson. Endsley, M. R. (1988). Situation awareness global assessment technique (SAGAT). Aerospace and Electronics Conference, Dayton, OH, USA. Endsley, M. R., B. Bolté and D. G. Jones (2003). Designing for situation awareness, Taylor & Francis Inc. FEMA (1999a) Rescue Specialist Training Manual. Volume, DOI: FEMA (1999b). Rescue Specialist Training Manual. FEMA (2003). "National Urban Search and Rescue (US&R) Response System: Field Operations Guide."
Search Methods in USAR 9/1/2008
63
Godding, J. E. P. (2004). Safety & Security Bereikbaarheid, toegang voor hulpverleningsdiensten en inzetplannen. Alphen aan den Rijn. Lang, L. (2008). "Search Theory Part I." Technical Rescue(50). Miles, C. A. (2007). "Through-the-Wall Surveillance: A New Technology for Saving Lives." Retrieved 29th august, 2008, from http://www.ojp.usdoj.gov/nij/journals/258/through-the-wall-surveillance.html. MINBZK (2003). Brancherichtlijn optische en geluidssignalen brandweer. herziene druk. Rijswijk. Murphy, R. (2003, 9 july 2008). "Robots, Rescue, and Reach-back." from http://141.142.204.227/Docs/Slides/030319/Murphy.pdf. Murphy, R., M. Ausmus, M. Bugajska, T. Ellis, T. Johnson, N. Kelley, J. Kiefer and L. Pollock (1999). Marsupial-like mobile robot societies. the third annual conference on Autonomous Agents Seattle, Washington, United States. Murphy, R. R. and J. L. Burke (2005). Up from the Rubble: Lessons learned about HRI from Search and Rescue. Murphy, R. R., J. Casper and M. Micire (2001). Potential Tasks and Research Issues for Mobile Robots in RoboCup Rescue. RoboCup 2000: Robot Soccer World Cup IV. Berlin, Springer Berlin. 2019/2001. Murphy, R. R., D. Riddle and E. Rasmussen, Eds. (2004). Robot-Assisted Medical Reachback: A Survey of How Medical Personnel Expect to Interact with Rescue Robots. NIBRA (2002a). Brandwacht Persoonlijke bescherming, Arnhem. NIBRA (2002b). Brandwacht Repressie, Arnhem. Nuttall, I. (2008). Urban Search and Rescue (USAR) Canines within the U.K. Fire Service. OCHA (2006a). United Nations Disaster Assessment and Coordination Field Handbook. OCHA (2007a). Situation Report 1 - Peru Earthquake - 16 augustus 2007. OCHA (2007b). Situation Report 2 - Peru Earthquake - 16 augustus 2007. OCHA, U. (2006b). INSARAG GUIDELINES AND METHODOLOGY.

Search Methods in USAR 9/1/2008
64
OCHA, U. (2008). "OCHA On-Line: Field Coordination Support Section - INSARAG USAR Directory." Retrieved 31th july 2008, 2008, from http://ocha.unog.ch/VirtualOSOCC/USAR_Directory/MemberCountriesOverview.asp. Onosato, M., F. Takemura, K. Nonami, K. Kawabata, K. Miura and H. Nakanishi (2006). Aerial Robots for Quick Information Gathering in USAR. SICE-ICASE, 2006. International Joint Conference, Bexco, Busan, Korea. Pritchard, C. (2008, 21 May 2008). "Operational information." Retrieved 9 july, 2008, from http://www.ukfssartdogteams.org.uk/operational_information.htm. Saeijs, G. E. M., R.Dammen, M. J. v. Duin, K. E. Engel and M. Zannoni (2006). Evaluatie Aardbeving Pakistan 2005 Inzet USAR.NL. Den Haag, COT Instituut voor Veiligheids- en Crisismanagement. Schweier, C. and M. Markus (2004). Assessment of the search and rescue demand for individual buildings. 13th World Conference on Earthquake Engineering. Vancouver, B.C., Canada. Schweier, C. and M. Markus (2006). "Classification of Collapsed Buildings for Fast Damage and Loss Assessment." Bulletin of Eartquake Engineering 4: 177-192. Search_Systems. "Search Cam: Victim Location System." Retrieved 2th juli, 2008, from http://www.searchsystems.com/PDF/SearchCam2000.pdf. Söylemez, E. and N. Usul. "Utility of Gis in Search and Rescue Operations (case study: Kütahya- Tavşanly)." Retrieved 17 march, 2008, from http://gis.esri.com/library/userconf/proc06/papers/papers/pap_1908.pdf. Stephens, D. W. and J. R. Krebs (1986). Foraging Theory: Monographs in behavior and ecology, Princeton University Press. Takemura, F., M. Enomoto, K. Denou, K. Erbatur, U. Zwiers and S. Tadokoro (2005). "A human body searching strategy using a cable-driven robot with an electromagnetic wave direction finder at major disasters." Advanced Robotics 19(3): 331-347. USACE (2005). Urban Search & Rescue Structures Specialist. uSAR-nl. (2007). "Inzet Beek." Retrieved 02-April, 2008, from http://www.usar.nl/nieuws/147. uSAR-nl. (2007a). "Classificatie "Heavy Team"." Retrieved 02-april, 2008, from http://www.usar.nl/nieuws/143. Wang, J. and S. Balakirsky (2007). USARSim V3.1.1: A Game-based Simulation Of mobile robots.
Search Methods in USAR 9/1/2008
65
Wright, C., A. Johnson, A. Peck, Z. McCord, A. Naaktgeboren, P. Gianfortoni, M. Gonzalez-Rivero, R. Hatton and H. Choset (2007). Design of a Modular Snake Robot. the 2007 IEEE/RSJ International Conference on Intelligent Robots and Systems, San Diego. Ye, C., S. Ma and B. Li (2006). Design and Basic Experiments of a Shape-Shifting Mobile Robot for Urban Search and Rescue. 2006 IEEE/RSJ International Conference on Intelligent Robots and Systems, Beijing, China.





























